PROBLEMA DEI DUE CORPI E MASSA RIDOTTA
Consideriamo due particelle P1 e P2, di masse m1 ed m2,
soggette soltanto alla loro mutua interazione gravitazionale.
Le equazioni del moto delle due particelle, per un osservatore
inerziale O, sono:
d 2 r1
m1
dt 2
F1
d 2 r2
m2 2
dt
F2
(dove le varie grandezze sono definite in figura),
ossia:
d 2 r1
dt 2
F1
m1
d 2 r2
dt 2
F2
m2
Queste due equazioni descrivono il moto di P1 e P2 intorno al
comune centro di massa.
Per descrivere il moto relativo di P1 rispetto P2. sottraiamo a
membro le precedenti due equazioni, ottenendo:
d 2 r1
dt 2
d 2 r2
dt 2
F1
m1
F2
m2
1
m1
1
F1
m2
dove si è tenuto conto che (per la III legge di Newton) risulta:
F1
F2
Quindi:
d2
r1
dt 2
r2
1
m1
1
F1
m2
Ma:
r1
r2
r
è il vettore posizione di P1 rispetto a P2 (diretto da P2 a P1).
Pertanto:
d 2r
dt 2
1
m1
1
m2
G m1 m2
r̂
2
r
A questo punto si introduce la massa ridotta, definita come:
1
1
m1
1
m2
Con questa posizione si ha:
d 2r
dt 2
G m1 m2
r̂
2
r
Il problema dei due corpi si è quindi ridotto al problema ad un
solo corpo. Dalla precedente si conclude che
il moto di P1 e P2 intorno al comune centro di massa è del tutto
equivalente a quello di una particella di massa pari alla massa
2
ridotta del sistema e soggetta ad una forza F1 G m1 m2 r
che ruota intorno ad un’altra particella di massa pari alla
massa totale del sistema ferma nell’origine di un riferimento
inerziale.
Dalla definizione di
1) m1 << m2
2) m1 = m2 = m
si può osservare che:
m1
=½m
(a)
(b)
(c)
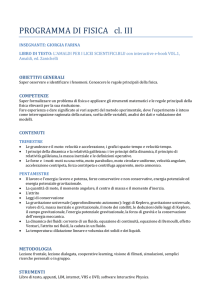
Descrizione del moto di due particelle P1 e P2 fatta da tre diversi
osservatori: (a) osservatore inerziale solidale con il centro di massa C
del sistema; (b): osservatore non inerziale solidale con P 2 (si noti la
comparsa della forza fittizia F0); (c): osservatore inerziale solidale con
la particella di massa m1 + m2 equivalente a P2. In tutti e tre i casi il
vettore r è diretto da P2 a P1.
MOTO DI UN CORPO SOTTO L’AZIONE DELLA
FORZA GRAVITAZIONALE
Le componenti radiale e trasversale della velocità (rispetto
ad un osservatore inerziale O posto nel centro del Sole) di un
corpo di massa m soggetto all’attrazione del Sole sono date
da:
v
dr
drˆ
rˆ r
dt
dt
d
(r rˆ )
dt
dr
d
rˆ r
nˆ
dt
dt
(dove n̂ è il versore normale ad r ).
Così:
v2
vR
2
vT
2
dr
dt
2
d
dt
2
r2
L’energia cinetica è allora:
Ek
1
m v2
2
1
dr
m
2
dt
2
1
d
m
2
dt
2
r2
In un moto curvilineo il momento angolare vale:
L
m
d
r2
dt
vR rˆ
vT nˆ
Pertanto:
1
dr
m
2
dt
Ek
2
1 L2
2 mr2
L’energia meccanica totale vale quindi:
E
Ek
E p (r )
1
dr
m
2
dt
2
1 L2
2 mr2
E p (r )
Questa equazione diventa identica a quella relativa al moto
rettilineo, cioè:
E
Ek
E p ( x)
1
dx
m
2
dt
2
E p ( x)
se si suppone che il corpo si muova sotto l’azione di
un’energia potenziale efficace:
E p , eff (r )
1 L2
2 mr2
E p (r )
1 L2
2 mr2
G
mM
r
Il primo termine viene chiamato energia potenziale
centrifuga e si indica con Ep,c.
L’energia potenziale centrifuga è associata ad una forza
fittizia:
Fc
dE p , c
dr
L2
rˆ
m r3
rˆ
che è diretta radialmente e quindi tende ad allontanare il
corpo dal centro di forza (Sole).
In definitiva si ha:
E
1
dr
m
2
dt
2
E p , eff (r ) .
Il moto radiale di un corpo sotto l’azione della forza
gravitazionale del Sole può essere descritto in maniera
analoga a un corpo in moto rettilineo, a patto di sostituire
l’energia potenziale gravitazionale con l’energia potenziale
efficace.
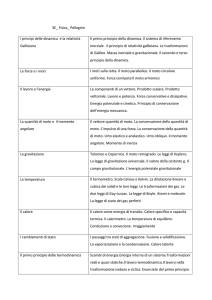
La curva che esprime l’andamento radiale dell’energia
potenziale efficace è molto utile per comprendere il moto del
corpo, anche senza risolvere l’equazione del moto.
Classificazione delle orbite
Relazione tra energia totale ed eccentricità e dell’orbita:
E
m3 M 3 1 e 2
G
m M 2 L2
Relazione tra energia totale e tipo di orbita
Energia totale E <0
0
>0
Eccentricità e
<1
1
>1
Orbita
ellisse parabola iperbole
Nel caso in cui E > 0, la traiettoria seguita dal corpo è
un ramo di iperbole equilatera.
VELOCITA DI FUGA
Energia totale di un satellite portato ad una quota h e spinto
orizzontalmente con velocità v0 :
E
1
2
m v0
2
GmM
R h
La velocità minima affinché il satellite sfugga dall’altezza h
alla gravità terrestre è tale che:
1
2
m v0
2
GmM
R h
ossia:
v0
2G M
R h
La velocità di fuga dalla superficie (h = 0) della Terra, o di
qualunque altro corpo celeste di massa M e raggio R , vale:
vF
2G M
R
Nel caso della Terra: vF = 1.13
104 m s-1
La velocità di fuga non dipende né dalla massa m del corpo né
dalla direzione del moto.
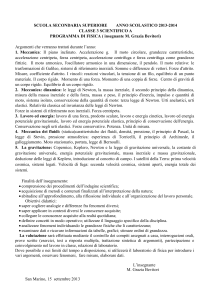
EFFETTI PERTURBATIVI SUL MOTO PLANETARIO
Oscillazioni dell’eccentricità dell’orbita (a). Rotazione
dell’asse maggiore dell’ellisse intorno al fuoco (b) che
genera un’orbita aperta detta a rosetta (c).
Entrambi gli effetti, che hanno tempi-scala dell’ordine dei
100 mila anni, sono stati esagerati di molto.
(a)
(b)
(c)