chinesiologia n. 1 / 2008
ARTICOLO 4
La componente biomeccanica
della postura umana
ELENA MARTINELLI* - VALTER PARODI**
* Università di Firenze, Facoltà di Medicina & Chirurgia; ** Università di Genova, Facoltà di Ingegneria - Medicina & Chirurgia
Riassunto
La componente biomeccanica della postura esprime la necessità tecnica di garantire, in ogni situazione ed
istante, l’equilibrio osteo-mio-articolare.
Le strutture osteo-mio-articolari (per dirla in termini meccanici: sistemi di leve ossee, incernierate tra loro mediante le articolazioni ed attivate/stabilizzate dalle contrazioni muscolari e dai legamenti) sono i trasduttori meccanici che realizzano, nel concreto, l’atteggiamento statico, o dinamico, voluto per il corpo. In altre parole, sono i mezzi che attribuiscono la fisicità reale alle nostre intenzioni posturali.
Summary
The biomechanical component of the posture expresses technical necessity to guarantee, in every situation and instant, the equilibrium to osteo-my-articular.
The osteo-my-articular structures (to tell her mechanical terms: systems of bony levers, among them through the
articulations and connected from the muscular contractions and from the ligaments) they are the mechanical trasduttoris that realize, in the concrete one, the static, or dynamic attitude, wanted for the body. In other words, they
are the means that attribute the real image to our postural intentions.
INTRODUZIONE
La stazione eretta, in appoggio bipede, frutto dell’evoluzione della specie umana, distingue l’uomo dagli altri animali. Tale soluzione strutturale si è sviluppata in assenza di spinte idrostatiche e sotto l’influenza di un campo gravitazionale, che determina
un condizionamento continuo generando problemi
d’assetto e d’equilibrio.
Per esprimere il concetto del controllo dell’assetto geometrico corporeo, finalizzato alla garanzia dell’equilibrio statico e dinamico, è stato sviluppato nel
tempo il termine “postura”.
I tre approcci culturali che, fondendosi tra loro,
danno origine alla moderna disciplina dello studio
della postura, sono:
• la componente biomeccanica,
• la componente neurofisiologica,
• la componente psicomotoria.
Per motivi di spazio, limiteremo la presente trattazione alla (parziale) discussione della prima di tali
componenti.
Non esiste una sola postura, ma un numero infinito di posture, corrispondenti a differenti “posizioni d’equilibrio dinamico”. La loro interazione/suc-
28
cessione permette l’espletamento delle funzioni motorie, statiche e dinamiche, in condizioni reali,
che generalmente non possono soddisfare contemporaneamente le situazioni di
(Fig. 1):
- massimo equilibrio
fig. 1
(stabilità);
- minimo consumo energetico (massima economia);
- massimo comfort (minimo sforzo a carico delle
strutture anatomiche).
La componente biomeccanica della postura esprime la necessità tecnica di garantire, in ogni situazione ed istante, l’equilibrio osteo-mio-articolare statico/dinamico.
ASPETTI OSTEO-MIO-ARTICOLARI
DELLA POSTURA
Le strutture osteo-mio-articolari (per dirla in termini
meccanici: sistemi di leve ossee, incernierate tra loro
mediante le articolazioni ed attivate/stabilizzate dalle
chinesiologia n. 1 / 2008
contrazioni muscolari e dai legamenti) sono i trasduttori meccanici che realizzano, nel concreto, l’atteggiamento statico, o dinamico, voluto per il corpo.
In altre parole, sono i mezzi che attribuiscono il supporto della fisicità reale alle nostre intenzioni posturali.
Oramai ben sappiamo che, affinché il movimento articolare si produca (o sia impedito), è indispensabile l’applicazione di una forza che agisca all’estremità di un braccio di leva. Questa è generata direttamente dagli attuatori muscolari, associati con l’articolazione, oppure è trasmessa, in via indiretta, da altri segmenti in movimento o proviene da effetti gravitazionali (o inerziali).
In ogni caso, essa deve possedere un’intensità tale
da vincere la reazione resistente che il sistema, in quel
momento (e per definiti gradi di libertà), oppone.
L’effetto della contrazione muscolare (generatrice
di forza e non di spostamento) determina, grazie alla mobilità di un segmento rispetto ad un altro ritenuto fisso (esistenza del grado di libertà specifico per
il dato movimento), l’avvicinamento dei due punti
estremi del muscolo stesso: origine ed inserzione.
In altri casi, la contrazione muscolare agisce da
freno al movimento, limitando l’allontanamento di
questi due punti. L’allontanamento, che viene contrastato, è il prodotto di forze muscolari antitetiche alla prima, oppure da forze aventi origine nell’ambiente
extramuscolare. Per esempio: l’estensione del gomito
(partendo dalla posizione flessa), prodotta dal peso
dell’avambraccio, è modulata dai muscoli flessori e
non dagli estensori; quella del ginocchio, prodotta
dal peso della gamba, è anch’essa regolata dai flessori e non dagli estensori.
Lo spostamento è conseguenza dell’applicazione
della forza, ma anche di altri fattori:
- gradi di libertà articolari
- geometria dei rapporti intersegmentari
- impedenza meccanica del sistema (si definisce così tutto ciò che crea opposizione allo sviluppo del
moto).
L’impedenza è combinazione di molti fattori:
• dell’inerzia, che si oppone alle variazioni dello stato di moto
• della gravità, che (esistendo un campo di potenziale gravitazionale) richiede energia per spostarsi verso l’alto e cede energia ai movimenti verso il basso.
Inoltre dipende:
• dalle resistenze articolari, che sono funzione della rigidezza dei tessuti e della geometria delle strutture
articolari di stabilizzazione
• dalle resistenze muscolari, a loro volta funzione delle caratteristiche visco-elastiche tessutali, del reclutamento delle unità motorie, della modulazione
agonista-antagonista e dell’azione della muscolatura stabilizzante.
La forza, che ogni muscolo è in grado di produrre, è direttamente proporzionale all’area della sua
sezione trasversale. Tuttavia, essa varia anche in rapporto alle condizioni meccaniche di lavoro ed alla
lunghezza istantanea del muscolo stesso, durante un
movimento generato da una contrazione sia in isometria sia auxotonica (così è definita una contrazione caratterizzata dall’aumento della forza col progredire del movimento; p.e. tirare un elastico).
Il sistema nervoso utilizza i muscoli principalmente facendo variare la loro lunghezza; questa funzione è condizionata anche dalla lunghezza iniziale
del muscolo e dalle forze resistenti che si oppongono
a tale variazione.
Poiché la potenza muscolare esprime il lavoro compiuto nell’unità di tempo, possiamo anche calcolarla
dal prodotto (fatto per ogni istante, cioè dall’integrale) della forza sviluppata per la velocità di contrazione.
Se la velocità di contrazione è costante, per un
certo intervallo di tempo, la forza potrà essere considerata direttamente proporzionale alla potenza.
Reciprocamente, la velocità di contrazione sarà direttamente proporzionale alla potenza, se è costante la
forza sviluppata (la forza resistente che viene vinta).
Ovviamente, per potenza muscolare costante la
tensione muscolare e la velocità di contrazione risulteranno inversamente proporzionali.
Le forze prodotte dalla contrazione muscolare sono trasferite alle estremità del muscolo, su origine ed
inserzione; trasmettendosi lungo una catena di leve,
vincoli e cerniere (fulcri), arrivano sulla struttura che
costituisce, in quel momento, il vincolo del corpo all’ambiente (nella maggior parte dei casi si tratta di
appoggio al suolo).
Affinché questa complessa sequenza di fenomeni
motori possa realizzarsi in modo armonico, è necessa-
29
chinesiologia n. 1 / 2008
ria l’informazione costante sulla situazione/mutamento della posizione d’ogni singolo segmento, che è assicurata dalle strutture neuro-senso-motorie di controllo.
La funzione antigravitaria, rappresentata dalla risposta motoria del corpo umano alla forza di gravità,
al fine di mantenere l’ortostatismo e permettere il
movimento, si attua non attraverso la generazione di
forze uguali e contrarie a quelle gravitarie, ma, bensì, attraverso la generazione di forze capaci di produrre dei momenti eguali e contrari a quelli derivanti dall’azione del peso. Complessi automatismi neuro-muscolari, regolano il valore istantaneo degli angoli
articolari e rendono possibile la ricerca e la stabilizzazione degli equilibri, necessari alla postura eretta, tra
gli effetti gravitari dovuti alle masse dei segmenti corporei e le azioni motorie muscolari.
L’esame biomeccanico della funzione antigravitaria
può essere semplificato (per motivi didattici, ma non
di sistema), considerando separatamente le varie principali articolazioni. Tuttavia, questa operazione “analitica del particolare” può farsi solo dopo aver sviluppato un giudizio completo sull’insieme, che consiste in
una valutazione/comprensione delle concatenazioni
funzionali delle articolazioni (+ masse segmentarie interconnesse) nell’ambito dell’intero sistema.
Il piede rappresenta la base d’appoggio principale, attraverso cui le forze, sviluppate od applicate a
livello delle strutture anatomiche superiori, sono scaricate al suolo.
Le articolazioni del piede (funzionalmente si può
comprendere in esso anche la caviglia) sono numerose,
specializzate e organizzate gerarchicamente. Fondamentali per la postura sono le articolazioni: sottoastragalica, mediotarsica e tibio-peroneo-astragalica.
La volta plantare, vera interfaccia del piede col
suolo, è costruita sui tre punti d’appoggio: le teste
del I e V metatarso e la tuberosità calcaneare. Fondamentale è la sua capacità di adeguarsi istantaneamente alla morfologia del suolo, contribuendo a mantenere invariata la posizione delle articolazioni della
caviglia e del ginocchio (e quindi garantendone la
funzionalità ottimale); in questo modo viene garantito il rispetto del loro vero unico grado di libertà: la
rotazione sul piano sagittale dell’arto inferiore, minimizzando le tendenze all’attivazione di altri gradi di
libertà spuri (per il cui controllo sarebbero richieste
onerose attivazioni muscolari).
In realtà non esiste una vera coincidenza né tra i
piani funzionali sagittali delle due articolazioni, né
di questi con quello dell’arto. L’asse trasversale bimalleolare è, infatti, aperto verso l’esterno e la posizione del piede, in pronazione od in supinazione, facilita, istante per istante, uno tra i molti piani su cui
la flesso-estensione della caviglia è possibile.
Il ginocchio, la cui complessità funzionale è ben
nota, è considerato per semplicità come articolazione
30
ad un solo grado di libertà, corrispondente alla rotazione (poco meno di 180°) sul piano sagittale.
In estensione completa, l’allineamento tra gli assi
longitudinali tibiale e femorale può essere mantenuto senza azione muscolare diretta, grazie ad un finecorsa passivo raggiunto in situazione di lievissima recurvazione.
Per quanto riguarda, invece, l’articolazione dell’anca, trattandosi di un’enartrosi (ossia di un’articolazione sferica) non esiste un fine-corsa di contatto rigido capace di produrre robusti contrasti passivi.
Tuttavia, nell’appoggio bipodale eretto, il quadrilatero rappresentato dal: bacino, assi verticali degli
arti inferiori e suolo, assicura una certa stabilità sul piano frontale (come si discuterà meglio in seguito).
Nei confronti dell’azione della gravità, ogni movimento provocato da essa va inteso, ai fini della
postura, come spostamento del segmento superiore
rispetto a quello inferiore. Una rotazione della caviglia non deve essere mai considerata come movimento, in estensione od in flessione, del piede sulla gamba, ma una rotazione, indietro od in avanti,
del piano frontale della gamba, sull’asse trasverso
della caviglia.
Per comprendere meglio il significato di questa
precisazione, si pensi che un piede in sospensione può
essere esteso e flesso dorsalmente, senza determinare reazioni di flesso-estensione nei segmenti superiori, mentre accade il contrario se è in appoggio.
Secondo le caratteristiche biomeccaniche dell’articolazione (ossia secondo i suoi gradi di libertà) nella quale si sviluppa il movimento prodotto dalla contrazione muscolare, assumono, di volta in volta, importanza prevalente i gruppi: flesso-estensori, rotatori o gli adduttori-abduttori.
Molto spesso i movimenti prodotti sono più complessi del previsto, risultando sviluppati su più di un
piano o andando a coinvolgere più segmenti.
Ampiezze del movimento
articolare (motilità)
L’ampiezza del movimento delle articolazioni (diartrosi) è determinata dalla:
- forma delle superfici articolari
- azione limitante dei legamenti (sia dell’articolazione, sia della capsula)
- azione di comando (o di limitazione) dei muscoli
- distribuzione della massa muscolare attorno all’articolazione.
Tali condizionamenti sono variabili da individuo
ad individuo e l’esercizio continuo si dimostra capace di incrementare notevolmente le possibilità di movimento delle diverse sedi articolari.
chinesiologia n. 1 / 2008
Questo fattore si dimostra particolarmente prezioso nelle attività mirate al recupero/mantenimento
della motilità articolare che tende a ridursi per il disuso motorio e l’invecchiamento.
Altri fattori influiscono, in forma più generale,
sull’ampiezza di ogni movimento possibile:
- tipo costituzionale: si tratta di differenti somatotipi (il termine si riferisce alla distribuzione dei diametri delle circonferenze corporee, rispetto alla lunghezza del corpo): gli endomorfi (che sono i più robusti) hanno motilità minima, se confrontata con
le prestazioni degli ectomorfi (magri) e dei mesomorfi (normali)
- abitudini e stili di vita
- stato di salute
- età.
Si hanno risultati diversi (spesso non confrontabili)
sulla motilità misurata:
- eseguendo i rilievi dei movimenti su scheletro (valori massimi)
- su reperti anatomici sperimentati in vitro
- direttamente in vivo, su soggetti collaboranti.
I motivi sono chiari: in taluni casi si prendono in
considerazione solo le superfici articolari (prive di
tutti i tessuti molli) ed in altri si trascurano le collaborazioni segmentali, che concorrono nel movimento in studio.
Tanto più sono simili le estensioni delle superfici
articolari e tanto minore risulta la mobilità. Questo perché le grandi escursioni sono possibili solo con congrui
spostamenti relativi dei punti delle zone di contatto.
P.e. la troclea del gomito si sviluppa per circa 320°,
mentre la cavità sigmoide dell’ulna, per circa 180°; abbinate consentono una mobilità in flesso-estensione
di circa 140° (320°-180°).
La mobilità, che è definita in conformità a queste
considerazioni, è chiamata “mobilità scheletrica” ed
è la massima possibile; tutti gli altri contributi anatomici sono sempre da intendersi in senso riduttivo.
Si distingue anche una mobilità attiva da una passiva, in funzione di come si ottiene il movimento.
La mobilità attiva è ottenuta dall’attivazione dei
muscoli relativi (in flessione ed estensione), mentre la
mobilità passiva è determinata dall’azione di forze
sempre esterne al corpo umano.
La mobilità passiva è sempre superiore a quella
attiva, ma risulta inferiore a quella scheletrica.
Tradizionalmente la motilità di un’articolazione è
misurata in gradi, visualizzando l’arco di cerchio descritto (proiettato su di un piano) da un segmento articolare, considerato mobile rispetto ad un altro assunto come fisso (o rispetto ad un riferimento esterno).
Praticamente si misura la flessione ed il cammino
inverso come estensione. Perciò è definita iperestensione un’azione di ritorno che evolve oltre la posizio-
ne d’inizio del movimento.
Partendo dalla posizione iniziale di riferimento,
sono misurate l’adduzione e l’abduzione; mentre la rotazione richiede la definizione preliminare di convenzioni specifiche per ogni tipo di articolazione.
Lo strumento più diffuso utilizzato per questi rilievi è ispirato al goniometro a due braccia; che si
può presentare dalla forma geometrica più elementare (due aste e scala angolare), fino ad un sistema di trasduttori, fissati al corpo, che realizza l’analisi automatica dei dati mediante elaboratore. In ogni caso il
sistema prevede l’individuazione di due assi di riferimento, nei segmenti corporei messi in moto relativo,
e l’individuazione dell’asse di rotazione dell’articolazione in esame (in molti sistemi, ad elaborazione automatica, la posizione dell’asse, ossia del centro di rotazione, è determinata automaticamente, in base all’analisi stessa del movimento).
Altri sistemi si limitano a dare una misura della giacitura spaziale dell’asse del segmento articolare in studio, riferita rispetto alla retta verticale d’azione gravitaria. Il sistema non fornisce direttamente i valori angolari relativi al movimento articolare, ma presenta
l’indubbio vantaggio di essere adeguato all’analisi di
movimenti di 360°, nelle 3D, senza onerose operazioni
di registrazione.
L’AAOS (l’Accademia Americana dei Chirurghi
Ortopedici) ha suggerito, sin dal 1965, un criterio
generale per la misura della motilità articolare mediante tecniche goniometriche (Method of Measuring and Recording), che si raccomanda per la sua
praticità e generalità d’impiego.
Può essere utile estrarne qualche cenno e considerazione generale.
- Gomito
La posizione di partenza è quella con il braccio
orizzontale, a livello della spalla (palmo verso l’alto)
e parallelo al piano sagittale. La misura è fatta in
flessione, con rotazione da 0° a 150°; l’estensione
può proseguire fino ad un’iperestensione di 10°.
- Spalla
E’ necessario separare il movimento scapolo-omerale da quello che si attua a livello scapolo-toracico.
La posizione di riferimento è quella del soggetto
in stazione eretta, con le braccia in basso ed i palmi
rivolti verso i fianchi.
Si misura, sul piano frontale, un’abduzione di
180° ed un’adduzione di 75° (in quest’ultima fase il
movimento del braccio non è più contenuto nel piano frontale).
Sul piano sagittale, la flessione raggiunge i 180°,
mentre l’estensione posteriore (retropulsione/retroposizione) è di circa 60°. Spostando il braccio su di
un piano orizzontale trasverso, posto all’altezza della
31
chinesiologia n. 1 / 2008
spalla, si ha una flessione orizzontale (o adduzione
orizzontale) anteriore di 130°÷135°, mentre l'estensione orizzontale (o abduzione orizzontale) è ≅ 45°.
- Anca
Dato che è un’enartrosi ammette rotazioni su tre
assi; pertanto si suggerisce di eseguire i rilievi su di
un soggetto posto supino su di una superficie rigida e di vigilare che non si verifichino movimenti
del bacino. Da tale posizione la flessione della coscia
risulta di 110÷120°.
- Caviglia
La mobilità è misurata da una posizione della
gamba flessa (90° al ginocchio e 90° alla caviglia), e
raggiunge i 20° in flessione dorsale e i 50° in flessione
plantare.
Centri delle articolazioni
I centri delle articolazioni sono dei parametri indispensabili per la valutazione dell’ampiezza del movimento articolare.
Il movimento umano è molto complesso e, per
poterne affrontare l’analisi posturale, spesso è necessario eseguire semplificazioni del modello di riferimento. Una delle più comuni semplificazioni consiste nel sostituire, alla situazione reale degli assi d’istantanea rotazione delle articolazioni, che descrivono i movimenti rotatori dei segmenti corporei nel
piano sagittale, alcuni centri di articolazione. Questi
centri sono detti “mediati”, perché, per individuare la
loro posizione, devono essere messi in relazione con
specifici punti di repere e non mutano durante tutta
l’evoluzione dell’arco del movimento.
Le esperienze condotte nello studio della cinematica umana ci confortano sull’adeguatezza dell’uso
dei centri medi delle articolazioni, in sostituzione degli assi istantanei.
Rimane il problema dell’identificazione geometrica di tali centri, dato che, come appare dalle considerazioni precedenti, non solo essi non corrispondono a specifici punti di repere anatomici, ma bisogna anche stabilire una loro posizione “mediata”, in
quanto spesso si tratta di assi di rotazione che compiono traslazioni non nulle durante l’esecuzione del
movimento.
Dato che il centro dell’articolazione è un punto comune agli estremi, distale e prossimale, di due segmenti tra loro articolati, questo costituisce una notevole semplificazione nello studio della cinematica
(p.e. nell’articolazione del ginocchio elimina lo scivolamento relativo tra estremità distale del femore ed
estremità prossimale della tibia, nel movimento di
flesso-estensione).
La soluzione al problema dell’identificazione delle
posizioni dei centri articolari può provenire solo da
32
studi anatomici, integrati da rilievi sperimentali del
movimento ed analizzati mediante tecniche statistiche.
P. de Leva (1996), propone una metodica semplice e d’immediato utilizzo, per l’identificazione dei
centri delle articolazioni fondamentali: spalla, gomito, polso, anca, ginocchio e caviglia.
Il metodo è quello di fare individuare i centri da
facili reperi anatomici, che sono:
- il punto più laterale sul processo acromiale della
scapola;
- il punto più prossimale sul bordo laterale del radio;
- l’estremità distale del processo stiloideo del radio;
- un punto sul solco dorsale, tra l’estremità del 3°
metacarpo e la base del 3° dito;
- estremità del gran trocantere;
- il punto più prossimale sul margine mediale della testa della tibia;
- l’estremità distale della tibia.
Con questa procedura i 12 principali assi articolari
del corpo umano sono definibili con un’accuratezza
sufficiente per le ordinarie analisi posturali.
L’equilibrio del tronco nella postura eretta
E’ una postura raramente utilizzata nella vita quotidiana ma utile come posizione di riferimento, grazie alla sua simmetria ed alle sue caratteristiche biomeccaniche facilmente definibili.
• Le parti scheletriche sono mantenute in equilibrio
dalle tensioni passive: dei legamenti, delle aponeurosi e delle reazioni elastiche dei muscoli, integrate
da un valore minimo della funzione attiva fornita
dalla contrazione delle unità motorie.
• Nella stazione eretta simmetrica rilassata, le articolazioni delle anche, così come quelle delle ginocchia, assumono una posizione di piena estensione,
poiché, dovendo sopportare il peso sovrastante, si
pongono in condizione di minimizzare la formazione di momenti destabilizzanti.
• Nell’articolazione della caviglia non c’è nessun contrasto osseo, o legamentoso, al movimento (come
avviene invece a livello del ginocchio); comunque la
tensione passiva della biarticolarità del muscolo gastrocnemio è un fattore importante per la stabilità, fino a quando il ginocchio è esteso e il corpo inclinato leggermente in avanti rispetto alle caviglie stesse.
L’equilibrio del bacino e il rachide lombare
La posizione del bacino è il fattore determinante
per l’allineamento posturale, sia corretto o scorretto,
infatti:
• la cintura pelvica trasmette l’azione gravitaria dal
rachide agli arti inferiori;
• il carico proveniente dalla parte superiore si divide
in due parti e, tramite le faccette articolari sacro-iliache, va a scaricarsi sulle teste femorali;
• la forza gravante sul sacro, in posizione eretta, pro-
chinesiologia n. 1 / 2008
duce una lieve fisiologica antiversione del bacino.
Il rachide lombare, per il solo fatto di essere situato
inferiormente, deve svolgere il compito strutturale
più impegnativo perché:
• su di esso grava il carico maggiore;
• è aggredito per primo dagli impulsi d’urto generati dalla deambulazione, almeno per la quota non
attenuata dagli arti inferiori.
Valori angolari della lordosi
lombare fisiologica
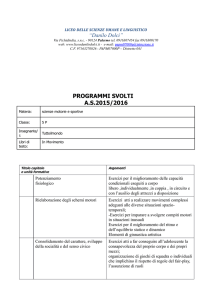
In radiografia è possibile rilevare i valori angolari
dei componenti l’articolazione lombo-pelvica (Kapandji, 1983):
• angolo del sacro (inclinazine del piatto superiore del sacro con
l’orizzontale): 30°
(Fig. 2 - Archivio
Raimondi mod.)
• angolo lombo-sacrale (intersezione degli assi
di L5 e del sacro):
140° (Fig. 3 - Archivio Raimondi
fig. 2 - 3
mod.)
• inclinazione del bacino in posizione eretta (angolo formato dalla linea che congiunge l’angolo sacrovertebrale con il bordo superiore della sinfisi pubica
e l’orizzontale): 60°.
Altre misurazioni, da Fernand e Fox (in Tribastone, 1988): (Fig. 4 - Archivio Raimondi mod.)
fig. 4
• l’angolo medio lombo-lombare, misurato tra il
piatto superiore di L2 ed il piatto inferiore di L5, è di
circa 32°
• il valore medio dell’angolo lombo-sacrale, misurato dal piatto superiore di L2 alla linea parallela al
piatto sacrale, è di circa 45°.
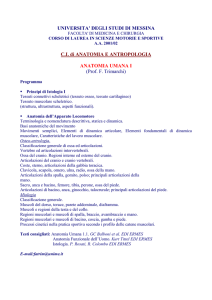
Una curvatura del rachide lombare superiore ai
68° si definisce iperlordosi, mentre una curvatura inferiore ai 23° si definisce ipolordosi (Fig. 5 - Archivio
Raimondi mod.).
L’articolazione
lombo-sacrale
La curvatura lombare assume il suo
apice a livello della
vertebra L3. Essa è la
prima vertebra, partendo dal basso, ad
essere priva di legamenti che la collegano con il bacino;
quindi, nella postura
fig. 5
eretta, il suo equilibrio deriva dal mantenimento dell’orizzontalità, dalla sua posizione al centro del corpo e dall’azione equilibrante dei muscoli su di essa inseriti.
Ha un arco posteriore necessariamente molto sviluppato, dove si inseriscono numerose fibre muscolari,
che vanno verso la parte superiore del dorso e verso
l’osso iliaco. L’effetto posturale conseguente è che la
contrazione dei muscoli, con inserzione sul bacino,
sposta all’indietro la L3 e riduce la lordosi lombare.
La L3 funziona come un fulcro, su cui convergono tutte le azioni derivanti dai carichi agenti sulla
parte superiore del corpo; la risultante si trasferisce alla L4, che, anche con l’intervento di altre strutture,
funge da ridistributore verso il sacro, bacino e anche.
Il disco in L3-L4 è orizzontale, quindi sono assenti le temute sollecitazioni di taglio, capaci di produrre scorrimenti tra i corpi vertebrali contrapposti.
Qualora, per un errore posturale, si verifichi un’obliquità del bacino, tale da impedire una sufficiente
orizzontalità del piatto inferiore di L3,
il disco viene sempre più esposto a sforzo di taglio e rischio di cedimento (Fig.
6 - Archivio Raimondi mod.).
Anche a livello di L4-L5 si nota la mancanza anatomica dei sistemi di controllo
passivo. La conseguenza è che, se si verifica un incremento di sollecitazione (dovuta all’inclinazione della sezione articolare),
fig. 6
il disco L4-L5 può risultare danneggiato
per carenza di protezione passiva.
Il disco L4-L5, in conseguenza di episodi di errata gestione posturale, è soggetto ad “usura” nel tempo; probabilmente per il frequente ripetersi d’azioni
di scorrimento a taglio, contrastate principalmente dalla sola rigidezza dell’anello (Fig. 7- Archivio Raimondi mod.).
Il disco L5-S1, come si è visto, è il più
fig. 7
predisposto a cedimenti per sovraccarichi
impulsivi. Esso, infatti, oltre ad essere dotato di una
forte inclinazione, è il primo disco, partendo dal basso,
e quindi rimane quello più vicino alla zona da dove
provengono gli urti prodotti da salti e cadute.
33
chinesiologia n. 1 / 2008
La vertebra L5 è situata tra il sacro
(S1) e il resto del rachide; perciò. con la
sua geometria, deve mediare l’entità della lordosi lombare necessaria a compensare l’inclinazione del bacino (Fig. 8 Archivio Raimondi mod.).
Eziologia della lordosi lombare
Il rachide lombare presenta una curfig. 8
va a concavità posteriore (lordosi), che
risente anche dell’atteggiamento delle curve soprastanti e dell’assetto del bacino, sia sul piano sagittale
sia sul piano frontale.
Sotto il profilo eziologico le lordosi lombari sono
classificate in:
LORDOSI PRIMARIE
Dovute a malformazioni congenite o a sovraccarichi acquisiti che riguardano le vertebre
lombari o l’osso sacro
* Sacro acuto, Sacro arcuato (Fig. 9),
Dimorfismi delle
vertebre lombari
(Fig. 10), Spondilolisi- spondilolistesi
fig. 9
(Fig. 11)
fig. 10
fig. 11
LORDOSI SECONDARIE
Dovute a malformazioni che
interessano l’articolazione coxo
femorale o dovute a fenomeni
di compenso
* Lussazione bilaterale
dell’anca, Coxartrosi
* Disequilibri
muscolari
fig. 13
(Fig. 13 e 14)
* primari, (ipotonia della muscolatura addominale, accorciamento
degli ileo-psoas, contrattura degli
estensori lombari).
* attitudinali e/o acquisiti (scarso
fig. 14
34
controllo posturale, atteggiamenti scorretti, dorso
curvo rigido, posizioni antalgiche)
* paramorfismi: iperlordosi del bambino, abito
astenico, addome prominente ipotrofico dell’adolescente, iperlordosi dell’adulto
L’equilibrio muscolare del bacino
Il bacino risente in modo diretto dell’azione delle masse muscolari che vi s’inseriscono e che possono
produrre movimenti di oscillazione sul piano sagittale
(antiversione - retroversione).
I muscoli che operano vincolati sul bacino generano delle coppie di forze che possono agire sia in contrapposizione antagonistica, ai fini della stabilizzazione, sia nel senso di provocare una rotazione e quindi un
aumento, o una riduzione, della lordosi lombare.
Se le due coppie lavorano sinergicamente contrapposte, concorrono ad equilibrare il bacino. Quando una delle due prevale sull’altra, il bacino può ruotare, sia nel senso dell’antiversione sia della retroversione, secondo il gruppo muscolare prevalente (De
Sambucy, 1945; Balland e Grozelier, 1946; Lapierre, 1974; Charrière e Roy, 1968; Kapandji, 1983).
Le forze sinergiche sviluppate dai muscoli, assieme
ai contrasti passivi ed alle modificazioni indotte nella configurazione della CV, possono determinare infinite posizioni d’equilibrio del bacino, tra cui anche l’assetto
posturale definito tradizionalmente come “normale”.
Una postura “normale” equilibrata è sempre stata
definita come: “... quello stato di assetto armonico, raggiunto dai segmenti corporei, che protegge le strutture
portanti del corpo”.
In queste condizioni s’ipotizza (!) che la muscolatura:
• lavori in modo efficace ed economico
• assicuri un equilibrio sufficientemente stabile, evitando eccessi di sforzi articolari e contratture
• consenta un’area di movimento normale per ogni articolazione
• svolga un’azione adeguata, in termini di forza e di
elasticità
• fornisca stabilità all’azione delle perturbazioni.
I muscoli che mantengono un allineamento corretto
del bacino, sia in direzione antero-posteriore sia laterale, sono di estrema importanza nel mantenimento di
un buon allineamento generale. Uno squilibrio tra i
muscoli che esercitano un’azione antagonista in posizione eretta, modifica l’allineamento del bacino con
conseguenze negative sulla postura delle parti del corpo soprastanti (rachide) o sottostanti (arti inferiori).
L’equilibrio muscolare in rapporto all’allineamento
ideale in proiezione sagittale
Nella visione laterale: (Fig. 15a e 15b - Archivio
Raimondi mod.)
• I muscoli, anteriori e posteriori, inseriti sul bacino
chinesiologia n. 1 / 2008
fig. 15 a
fig. 15 b
ne rendono possibile il controllo in rotazione.
• Anteriormente, i muscoli addominali (obliquo esterno e interno, retto dell’addome) agiscono verso l’alto e i flessori dell’anca (ileo-psoas, tensore della fascia lata e retto femorale) verso il basso.
• Posteriormente, i muscoli spinali lombari agiscono verso l’alto e gli estensori dell’anca (grande gluteo, bicipite femorale, semimembranoso e semitendinoso) verso il basso.
• Gli addominali e gli estensori dell’anca lavorano
insieme ruotando il bacino in retroversione.
• I muscoli della regione lombare ed i flessori dell’anca
agiscono assieme ruotando il bacino in antiversione.
• I muscoli posteriori della gamba sono interessati alle
sinergie equilibratrici (la retta d’azione gravitaria del
centro di massa del corpo umano passa, infatti, davanti
all’asse della tibiotarsica), quindi l’azione ponderale gravitaria è equilibrata anche dalla forza dei flessori plantari (sebbene sul ruolo relativo del soleo e del gastrocnemio i pareri non siano concordi).
L’equilibrio muscolare in rapporto all’allineamento
ideale in proiezione frontale (posteriore)
In posizione eretta, se si mantiene la simmetria
dell’atteggiamento rispetto al piano sagittale cardinale, la conservazione dell’equilibrio sul piano frontale è meno dispendiosa di quella sul piano sagittale.
L’azione gravitaria tende a divaricare gli arti per
portare in basso il baricentro (minimizzazione dell’energia potenziale ed aumento della stabilità). L’attrito offerto dall’interfaccia piede-suolo è, di regola, sufficiente ad impedire questa abduzione delle cosce.
Quindi, a piedi fissati in appoggio, gli spostamenti laterali del bacino, che implicherebbero sia pure un
modesto abbassamento del baricentro, coinvolge quattro simultanei spostamenti angolari:
• la rotazione esterna del piede e l’adduzione dell’anca dal lato verso il quale il bacino si sposta;
• la rotazione interna del piede e l’abduzione dell’anca del lato opposto.
E’ sufficiente, quindi, l’attivazione alterna e incrociata dei quattro gruppi muscolari antagonisti (tibiali e glutei laterali del primo lato, peronei e adduttori del secondo) per correggere le oscillazioni descritte su questo piano.
Valutazione dell’assetto del bacino
L’angolo di inclinazione fisiologico del bacino (detto anche di basculamento) non varia in modo sensibile nei soggetti normali, a differenza del caso dei
soggetti paramorfici (come conseguenza del dorso
curvo o per sbilanciamenti del busto) e nel caso di
dismorfismi.
La valutazione dell’assetto del bacino è parte essenziale dell’esame morfofunzionale, in stazione eretta, che
precede la stesura del programma di lavoro, ai fini dell’impostazione delle posizioni di partenza (angolatura ottimale) e della scelta degli esercizi addominali.
Il sistema più semplice per valutare l’assetto del
bacino, senza ricorrere all’uso di strumentazioni, è il
metodo di Piollet (Lapierre, 1974; Pivetta, 1976),
che valuta la distanza tra le rette orizzontali passanti
per i punti di Huc (1937) (Fig. 16a, 16b, 16c e 16d
- Archivio Raimondi mod.):
fig. 16 a b c
SIPS: spina iliaca posteriore superiore
SIAS: spina iliaca anteriore superiore
O: ombelico
Bacino in assetto fisiologico: (Fig. 16a)
Il bacino è in assetto fisiologico quando il soggetto è privo di dimorfismi ed esiste equilibrio tra la muscolatura posteriore e quella anteriore. In questo caso:
* il bacino è stabilizzato in posizione fisiologica
* la distribuzione, nei segmenti corporei, degli effetti del carico è fisiologica.
Bacino anteroverso: (Fig. 16b)
È dovuto allo squilibrio dei muscoli antero-posteriori con un aumento del tono dei muscoli spinali lombari e dell’ileo-psoas.
Conseguenze:
* si accentua la lordosi lombare
* si accentua la cifosi dorsale.
Principali muscoli antiversori:
* anteriormente: ileo-psoas, retto femorale, sartorio,
tensore della fascia lata, adduttori (piccolo e medio)
* posteriormente: i muscoli lombari.
Bacino retroverso: (Fig. 16c)
E’ dovuto allo squilibrio dei muscoli antero-posteriori con un aumento del tono del grande gluteo, de-
35
chinesiologia n. 1 / 2008
CONCETTI DA RAMMENTARE
(Per la prima volta si propone, a livello sperimentale, una riepilogazione sintetica delle affermazioni salienti espresse nel testo ed altre utili alla comprensione della problematica posturale)
fig. 16 d
gli estensori della coscia e del retto addominale: il pube sporge in avanti e le creste iliache ruotano indietro.
Conseguenze:
* si riduce la lordosi lombare
* si riduce la cifosi dorsale.
Principali muscoli retroversori:
* anteriormente: retto addominale, traverso, obliqui
(interni, esterni)
* posteriormente: gran gluteo, bicipite, semitendinoso, semimenbranoso, grande adduttore.
Rotazione del bacino sul piano trasversale.
Se un emibacino sporge anteriormente rispetto a
quello controlaterale, può essere conseguenza della
rotazione associata alla scoliosi lombare o del compenso di squilibri muscolari. Tale alterazione geometrica denuncia sempre una
torsione rachidea, con profonde alterazioni degli spazi
tra le faccette articolari e delle geometrie relazionali delle coppie di apofisi contrapposte. Altera la simmetria
sagittale dei legamenti e la
funzionalità dei muscoli rotatori del rachide e degli arti inferiori (Fig.17 - Archivio
Raimondi mod.)
fig. 17
Rotazione sul piano frontale
Consiste nell’innalzamento di un’ala iliaca rispetto alla controlaterale. Può essere conseguenza di una
dismetria degli arti inferiori, ma
anche di problematiche legamentose del bacino o dell’articolazione coxofemorale. Anche
in questo caso, come nel precedente, si producono disordini nei sistemi osteolegamentosi di controllo passivo ed asimmetrie funzionali nella muscolatura intrinseca del tratto lombare (Fig.18 - Archivio Raimondi mod.).
fig. 18
36
- La stazione eretta, in appoggio bipede, è frutto dell’evoluzione della specie umana.
- Tale soluzione si è sviluppata senza spinte idrostatiche e dentro un campo gravitazionale.
- Questo determina un condizionamento, generando
continui problemi d’assetto e d’equilibrio.
- Nell’uomo, bipede, l’area d’appoggio al suolo diminuisce ed il centro di gravità del corpo s’innalza.
- Lo sviluppo di un robusto apparato muscolo-tendineo è in grado di sostenere questo nuovo assetto.
- Il corpo umano diventa un sistema articolato aperto e non più “chiuso” rispetto al suolo.
- Il corpo umano, verticalizzato, aumenta la possibilità di modificare i suoi assetti geometrici.
- Aumenta la possibilità di modificare la posizione
spaziale del suo centro di gravità.
- Questo ha costretto l’uomo ad affinare il controllo
dell’equilibrio dinamico.
- Compensa le frequenti situazioni d’instabilità attraverso l’attivazione dell’apparato muscolare.
- Il concetto del controllo dell’assetto geometrico
corporeo è espresso con il termine “postura”.
- La postura ha avuto e ha molte differenti definizioni.
- I tre approcci culturali della postura sono: biomeccanica, neurofisiologia e psicomotricità.
- esistono un numero infinito di posture, corrispondenti a differenti “posizioni d’equilibrio dinamico”.
- Non si possono soddisfare contemporaneamente i
massimi di: equilibrio, economia e comfort.
- La biomeccanica della postura garantisce, in ogni situazione, l’equilibrio osteo-mio-articolare.
- Strutture osteo-mio-articolari = leve ossee + articolazioni + muscoli + legamenti.
- Esse realizzano nel concreto l’atteggiamento statico/dinamico, voluto per il corpo.
- Affinché il movimento si produca (o sia impedito)
è indispensabile l’applicazione di una forza.
- La contrazione muscolare è generatrice di forza e non
di spostamento.
- Lo spostamento si determina grazie alla mobilità
di un segmento rispetto ad un altro ritenuto fisso.
- La contrazione muscolare può anche agire da freno
al movimento.
- Lo spostamento è conseguenza dell’applicazione
della forza, ma anche di altri fattori.
- Gli altri fattori sono: libertà articolare, rapporti intersegmentari e impedenza del sistema.
- L’impedenza meccanica è quanto crea opposizione
allo sviluppo del moto.
- L’impedenza è combinazione di: inerzia, gravità,
chinesiologia n. 1 / 2008
resistenze articolari e muscolari.
- La forza, che ogni muscolo è in grado di produrre,
è proporzionale all’area della sua sezione.
- Tuttavia, essa varia anche in rapporto alle condizioni meccaniche di lavoro.
- Il sistema nervoso utilizza i muscoli principalmente facendo variare la loro lunghezza.
- La potenza muscolare esprime il lavoro compiuto
nell’unità di tempo dal muscolo stesso.
- Possiamo anche calcolarla moltiplicando la forza
sviluppata per la velocità di contrazione.
- Le forze di contrazione sono trasferite alle due estremità del muscolo, su origine ed inserzione.
- Perché i fenomeni motori possano realizzarsi è necessaria l’informazione costante sulle posizioni.
- L’informazione sulla posizione d’ogni segmento è assicurata dalle strutture neuro-senso-motorie.
- La funzione antigravitaria rappresenta la risposta
motoria del corpo umano alla forza di gravità.
- Si attua producendo dei momenti eguali, e contrari, a quelli derivanti dall’azione del peso.
- Complessi automatismi neuro-muscolari regolano
il valore istantaneo degli angoli articolari.
- L’esame della funzione biomeccanica antigravitaria
può essere semplificato mediante la ripartizione.
- L’operazione è possibile considerando separatamente
le varie principali articolazioni.
- Tuttavia, questa operazione può farsi solo dopo aver
sviluppato un giudizio completo sull’insieme.
- Il piede rappresenta la base d’appoggio, attraverso
cui le forze sono scaricate al suolo.
- Le articolazioni del piede/caviglia sono numerose,
specializzate e organizzate gerarchicamente.
- Fondamentali, per la postura, sono: sotto-astragalica,
mediotarsica e tibio-peroneo-astragalica.
- La volta plantare è la vera interfaccia del piede col
suolo.
- Essa è costruita sui tre punti d’appoggio: le teste
del I e V metatarso e la tuberosità calcaneare.
- Fondamentale è la sua capacità di adeguarsi istantaneamente alla morfologia del suolo.
- Ciò mantiene invariata la posizione delle articolazioni della caviglia e del ginocchio.
- Il ginocchio è considerato, per semplicità, come articolazione ad un solo grado di libertà.
- Nell’anca, non esiste un contatto rigido di fine-corsa, capace di produrre robusti contrasti passivi.
- Il quadrilatero: bacino, assi verticali degli arti inferiori e suolo, assicura stabilità sul piano frontale.
- L’ampiezza del movimento delle articolazioni (diartrosi) è determinata da numerosi fattori.
- Importanti sono: forme articolari, legamenti, comando dei muscoli e loro distribuzione.
- Tali condizionamenti sono variabili da individuo
ad individuo.
- L’esercizio continuo incrementa notevolmente le
possibilità di movimento delle sedi articolari.
- La motilità articolare tende a ridursi per il disuso
motorio e l’invecchiamento.
- Si distingue anche una mobilità attiva da una passiva, in funzione di come si ottiene il movimento.
- La mobilità attiva è ottenuta dall’attivazione dei
muscoli relativi (in flessione ed estensione).
- La mobilità passiva è determinata dall’azione di forze di origini sempre esterne al corpo umano.
- La mobilità passiva è sempre superiore a quella attiva, ma risulta inferiore a quella scheletrica.
- Tradizionalmente la motilità di un’articolazione è
misurata in gradi.
- Praticamente si misura la flessione ed il cammino inverso è valutato come estensione.
- E’ definito iperestensione un ritorno che evolve oltre la posizione d’inizio del movimento.
- Lo strumento più elementare, utilizzato per questi
rilievi, è il goniometro a due braccia.
- Può sostituirsi con dei trasduttori fissati al corpo, che
realizzano l’analisi automatica dei dati.
- Con tali sistemi, la posizione dell’asse di rotazione
è determinata automaticamente in base al moto.
- L’AAOS suggerisce criteri comuni di tecniche goniometriche per la misura della motilità articolare.
- I centri delle articolazioni sono parametri indispensabili per la valutazione del movimento.
- Il movimento umano è molto complesso, dato che
dipende da un sistema segmentato.
- Per affrontare l’analisi posturale spesso è necessario usare un modello di riferimento semplificato.
- Una comune semplificazione consiste nel sostituire, ai reali assi istantanei, i centri di articolazione.
- Questi centri sono “mediati”, perché non mutano
durante tutta l’evoluzione del movimento.
- Le esperienze condotte ci confortano sull’adeguatezza
dell’uso dei centri medi delle articolazioni.
- Rimane il problema dell’identificazione geometrica di tali centri.
- Essi non corrispondono a specifici punti di repere
anatomici e la loro posizione è “mediata”.
- L’identificazione dei centri articolari proviene da
rilievi sperimentali del movimento.
- Esistono metodiche semplificate, e d’immediato
utilizzo, basate su riferimenti anatomici.
- La postura eretta è utile come posizione di riferimento, grazie alla sua simmetria e semplicità.
- L’equilibrio è assicurato da tensioni passive e da una
modesta funzione attiva muscolare.
- Nella postura eretta, simmetrica e rilassata, le anche
e le ginocchia sono in piena estensione.
- Nell’articolazione della caviglia non c’è nessun contrasto osseo o legamentoso.
- La posizione del bacino è determinante per l’allineamento posturale, sia corretto o scorretto.
- Il rachide lombare, essendo situato inferiormente,
37
chinesiologia n. 1 / 2008
svolge il compito strutturale più impegnativo.
- Su esso grava il carico maggiore ed è aggredito dagli impulsi d’urto generati dalla deambulazione.
- Angolo del sacro (inclinazine del piatto superiore del
sacro con l’orizzontale): 30°
- Angolo lombo-sacrale (intersezione degli assi di L5
e del sacro): 140°
- Inclinazione del bacino in posizione eretta: 60°.
- Angolo medio lombo-lombare (tra il piatto superiore
di L2 ed il piatto inferiore di L5): 32°
- Angolo medio lombo-sacrale (dal piatto superiore
di L2 alla linea parallela al piatto sacrale): 45°.
- La curvatura del rachide lombare inferiore ai 23° si
definisce ipolordosi.
- La curvatura lombare superiore ai 68° si definisce
iperlordosi.
- La curvatura lombare assume il suo apice a livello
della vertebra L3.
- La L3 è la prima vertebra ad essere priva di legamenti
che la collegano con il bacino.
- L’equilibrio della L3 deriva dall’orizzontalità, dalla
sua posizione e dall’azione dei muscoli.
- La L3 ha un arco posteriore molto sviluppato, dove si inseriscono numerose fibre muscolari.
- Contraendo i muscoli, con inserzione sul bacino, si
retrocede la L3 e si riduce la lordosi lombare.
- La L3 è un fulcro, su cui convergono le azioni dei
carichi agenti sulla parte superiore del corpo.
- La L3 carica L4, che assieme ad altre strutture trasferisce le forze verso il sacro, bacino e anche.
- Il disco in L3-L4 è orizzontale, quindi sono assenti le temute sollecitazioni di taglio.
- Se, per malapostura, si ha insufficiente orizzontalità di L3, il disco è esposto a rischio.
- Anche a livello di L4-L5, si nota la mancanza anatomica dei sistemi di controllo passivo.
- Se si verifica inclinazione della sezione, il disco L4L5 può danneggiarsi per carenza di protezione.
- Il disco L4-L5, per malapostura, è soggetto ad “usura” nel tempo per azioni di scorrimento a taglio.
- Il disco L5-S1 è il più predisposto a cedimenti per
sovraccarichi impulsivi.
- Esso, infatti, ha forte inclinazione ed è il primo disco ad essere investito dall’offesa dal basso.
- La lordosi lombare risente anche dello sviluppo delle curve soprastanti e dell’assetto del bacino.
- I muscoli, anteriori e posteriori, inseriti sul bacino
ne rendono possibile il controllo in rotazione.
- Anteriormente, i m. addominali agiscono verso l’al-
38
to e i flessori dell’anca verso il basso.
- Posteriormente, i m. spinali lombari agiscono verso l’alto e gli estensori dell’anca verso il basso.
- Gli addominali e gli estensori dell’anca, lavorando
insieme, ruotando il bacino in retroversione.
- I muscoli della regione lombare ed i flessori dell’anca agiscono ruotando il bacino in antiversione.
- I muscoli posteriori della gamba sono interessati
nelle sinergie equilibratrici.
- L’azione ponderale gravitaria è equilibrata anche
dalla forza dei flessori plantari.
- La conservazione dell’equilibrio sul piano frontale
è meno dispendiosa di quella sul piano sagittale.
- L’azione gravitaria tende a divaricare gli arti per
portare in basso il baricentro.
- L’attrito, dell’interfaccia piede-suolo, impedisce l’abduzione gravitaria delle cosce.
- La valutazione dell’assetto del bacino è parte essenziale dell’esame morfofunzionale.
- Il sistema più semplice, per valutare l’assetto del
bacino, è il metodo di Piollet.
- L’angolo di inclinazione fisiologica del bacino non
varia in modo sensibile nei soggetti normali.
- L’angolo del bacino muta nel caso dei soggetti con
paramorfismi e dismorfismi.
- Il bacino anteroverso/retroverso è dovuto allo squilibrio dei muscoli antero-posteriori.
- Nel bacino anteroverso, come conseguenza, si accentuano la lordosi e la cifosi dorsale.
- Muscoli antiversori ant.: ileo-psoas, retto femorale,
sartorio, tensore della fascia lata, adduttori.
- Muscoli antiversori post.: muscoli lombari.
- Nel bacino retroverso, come conseguenza, si riducono la lordosi lombare e la cifosi dorsale.
- Muscoli retroversori ant.: retto addominale, traverso, obliqui (interni, esterni).
- Muscoli retroversori post.: gran gluteo, bicipite, semitendinoso, semimenbranoso, grande adduttore.
- Rotazione del bacino sul piano frontale = innalzamento di un’ala iliaca rispetto alla controlaterale.
- Produce disordini nei sistemi osteolegamentosi passivi ed asimmetrie nella muscolatura intrinseca.
Estratto da:
Martinelli E., Parodi V., (2008) “Il back pain di
origine meccanica - Fondamenti di biomeccanica rachidea e patomeccanica - Ruolo della prevenzione,
educazione e rieducazione motoria” in corso di stampa presso Editrice Veneta S.a.S. Vicenza.
chinesiologia n. 1 / 2008
Bibliografia
1. AAOS (1965), Method of measuring and recording.
2. CHARRIERE L., ROY J. (1968), Kinésithérapie des déviations latérales du rachis, Masson, Paris.
3. COLOMBINI D., OCCHIPINTI E., MOLTENI G., GRIECO A., PEDOTTI A., BOCCARDI S., FRIGO C., MENONI O. (1985), Posture Analysis, Ergonomics.
4. COMMITTEE OF THE AMERICAN ACADEMY OF ORTHOPAEDIC
SURGEONS (1947), Posture and its relationship to orthopaedic disabilities.
5. DE GIORGI G., GENTILE A., MARTUCCI G. (1997), Biomeccanica della colonna vertebrale, Biomeccanica, UTET,
Torino, p. 154.
6. DE LEVA P. (1996), Joint center longitudinal position computed from a selected subset of Chandler’s data, J. Biomechanics, Vol. 29, N° 9, p. 1231.
7. DELISLE A., GAGNON M., SICARD C. (1997), Effect of pelvic tilt on lumbar spine geometry, IEEE Trans. Rehabilitation Eng. Vol. 5, 4, p. 360.
8. DOLAN P., ADAMS M.A., HUTTON W.C. (1988), Commonly
adopted postures and their effect on the lumbar spine,
Spine, 13, p. 197.
e rieducazione motoria, in corso di stampa presso Editrice Veneta S.a.S. Vicenza.
18. MARTINELLI E., RAIMONDI P., PARODI V. (2006), Biomeccanica della postura nelle lombalgie, in Chinesiologia
XXIV, n° 2 (ISSN 1824-7911), p. 42.
19. PARODI V. (2003), Cosa intendo per Biomeccanica, Chinesiologia, Vol. XXI, N° 1, p. 14.
20. PARODI V. (2003), Fondamenti di biomeccanica della
colonna vertebrale, G. Gallery Editore, Genova, testo
sperimentale multimediale E-Learning (8 crediti ECM).
21. PARODI V. (2003), Fondamenti di biomeccanica per le
Scienze Motorie, Edizioni Fabula, Milano, testo multimediale su CD (14 ore di parlato).
22. PARODI V. (2003), La risposta del rachide normale ai
carichi dinamici, nel Congresso “Il corsetto ortopedico
nella gestione multidisciplinare del bambino scoliotico”,
I.S. G. Gaslini, 5-6 Dicembre, p. 5.
23. PARODI V., MARTINELLI E. (2006), Biomeccanica del rachide in accrescimento, Atti 6° Convegno Sport e medicina, Viareggio 21 Febbraio.
24. PARODI V., PARODI G. (2002), Biomeccanica della postura del lavoro, Congresso UNC, Asti 7 Dicembre, p. 6.
9. GU M., SCHULTZ A.B., SHEPARD N.T., ALEXANDER N.B.
(1996), Postural control in young and elderly adults when
stance is perturbed: dynamics, J. Biomechanics, Vol.
29, N° 3, p. 319.
25. PARODI V., PARODI G. (2003), La biomeccanica nella postura
biomedica, Atti Congresso UNC “Le algie causate da posture continuative nel lavoro” Asti, 15 Novembre, p. 3.
10. JENSEN R.K. (1993), Human morphology: its role in the
mechanics of movement, J. Biomechanics, Vol. 26,
Suppl. 1, p. 81.
26. PARODI V., BECCHETTI S., MONTI M. (1996), La biomeccanica della funzione strutturale rachidea considerando
le curve fisiologiche, Chinesiologia, XIV, N. 4, p. 15.
11. KAPANDJI I.A. (2002), Fisiologia articolare, Maloine, Monduzzi Editore.
27. PARODI V., BECCHETTI S., MONTI M. (1997), Analisi biomeccanica del comportamento del rachide sotto eccitazione dinamica verticale, Chinesiologia, XV, N. 2/3,
p. 11.
12. LUCAS D.B., BRESLER B. (1961), Stability of the ligamentous spine, Tech. Rep. N°40, Biomechanics Laboratory, S. Francisco.
13. MAKI B.E. (1993), Biomechanical approach to quantifying anticipatory postural adjustments in the elderly,
Med. & Biol. Eng. & Comput., 355, p. 355.
14. MARTINELLI E. (1988), Metodi di analisi e valutazione
delle posture proposti dall’unità di ricerca E.P.M. Chinesiologiascientifica, anno VI n° 1.
15. MARTINELLI E. (1998), L’utilizzo della telecamera nell’esame del portamento, La Ginnastica Medica, vol. XIVI,
fascicolo 3/4.
28. PARODI V., BECCHETTI S., MONTI M. (1997), La biomeccanica delle funzioni rachidee come sintesi dell’organizzazione muscolare e legamentosa vertebrale, Chinesiologia, XV, n° 1, p. 11.
29. PIVETTA S. (1976), Le premesse della ginnastica correttiva, Sperling & Kupfer.
30. PIVETTA S., PIVETTA M. (2002), Tecnica della ginnastica
medica, V° edizione, Edi. Ermes, Milano.
16. MARTINELLI E., CIARI E., CECI F. (2003), Asimmetrie, rigidità, difetti del portamento: risultati di uno screening
scolastico, in “La Ginnastica Medica” vol. LI, fascicolo 5/6.
31. RAIMONDI P., VINCENZINI O. con la collaborazione di PROSPERINI V., CECCHINI E., FARALDO P., MARTINELLI E., Teoria metodologia e didattica del movimento compensativo rieducativi preventivo, capitolo n° 28 “L’attività motoria
adattata all’adulto scoliotico” da pag. 641 a pag. 650,
Margiacchi - Galeno Editrice, 1.a edizione italiana, Perugia, ottobre 2003.
17. MARTINELLI E., PARODI V. (2008), Il back pain di origine
meccanica - Fondamenti di biomeccanica rachidea e
patomeccanica - Ruolo della prevenzione, educazione
32. TRIBASTONE F., TRIBASTONE P., Compendio di Educazione Motoria Preventiva e Compensativa, Società Stampa Sportiva, Roma 2001.
39