Giornata di studio: Metodologie innovative di rilevamento per l’aggiornamento dell’Inventario
castanicolo nazionale. Accademia dei Georgofili – Firenze, 6/2/17
Metodologia per il
rilevamento dei
castagneti da frutto IGP
Travaglini D.1, Chirici G.1, Del Perugia B.1,
Giannetti F.1, Bottai L.2, Gozzini B.2, Corona P.3
1
Università di Firenze, Dip.to GESAAF, geoLAB
Consorzio LaMMA, Firenze
3 CREA, Arezzo
2
Esperienze pregresse
Anno: 2007
Ambito: progetto Leader Plus CASTANEA
Studio: Messa a punto di una metodologia per
il censimento e la mappatura dei castagneti
da frutto
Enti promotori: ARSIA Regione Toscana, GAL
F.A.R. Maremma
Cavalletto dendrometrco
Vertex
Ricevitore GNSS
Nastro metrico
GNNS
N
Bussola
Elenco dei dati censiti per singola pianta
Scheda A
Varietà e stato
fitosanitario
Scheda B
Caratteri
dendrometrici e
potature
Scheda C
Dimensione dei
frutti e
meccanizzazione
Scheda D
Dati catastali
Foto
Varietà/ecotipo
Stato vegetativo
Sintomi
Diametro
Altezza totale
Altezza inserzione chioma
Raggio medio della chioma
% Chioma compressa
% Chioma aduggiata
Potature
Pianta monumentale
Accidentalità del terreno
Pendenza intorno alla pianta
Presenza di altre specie
Accesso per mezzi meccanici
Dimensione del frutto
Coordinate X,Y
Posizionamento
+ misura dei tempi di rilievo
Mobile
laser scanning
Terrestrial
laser scanning
Field-Map
system
Avanzamenti tecnologici
ZEB 1 Personal Laser Scanning (PLS)
Produttore: GeoSLAM (www.geoslam.com)
Fornitore: Me.s.a. (TO) (http://www.mesa-laserscanner3d.com)
Velicità acquisizione: 43k punti/sec
Accuratezza 3D: ± 0,1%
Max Range: 15-30 m
Angolo di vista: +270 x ≈100 gradi
Peso: 665 gr
Tecnologia SLAM - Simultaneous Localisation And Mapping
ZEB 1 funziona senza necessità di GPS, se non per la georeferenziazione
Obiettivi
Valutare le potenzialità dei PLS per l’inventariazione dei castagneti da frutto IGP
Numero di piante
Coordinate X,Y della singola pianta
Diametro a 1,3 m da terra
Altezza totale
Altezza di inserzione della chioma
Area di insidenza della chioma
Architettura 3D del fusto e della chioma
+ misura dei tempi di rilievo
P
F
R
E
C
I
S
I
O
N
O
R
E
S
T
R
Y
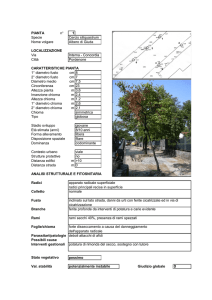
Casi studio e protocollo di rilievo
Monte Amiata (GR): 3 aree di studio, le stesse misurate nel 2007 con ARSIA
Area 1 (2827 m2)
Area 3 (4410 m2)
Sfera
10 m
Area
recintata
Ortofoto anno 2013
Area studio
Posizione punto GNSS
Percorso ZEB1
Posizione sfera
Zona con rovo
Posizione castagni nel 2007
Z
E
B
1
GNSS
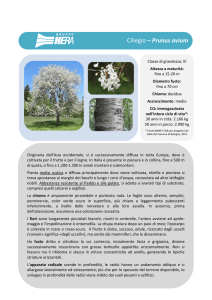
Elaborazioni
Pre-elaborazione on line su GeoSLAM cloud
Rimozione outlayers
Classificazione punti ground
Classificazione punti above ground
Identificazione delle sfere
Georeferenziazione della nuvola
Segmentazione singolo albero
http://computree.onf.fr
Esempio identificazione sfera
Esempio estratto dalla nuvola punti ZEB1
Esempio segmentazione singolo albero
Coordinate X,Y
Diametro
1,3 m
Sezione a 1,3 m
Altezza totale
Altezza ins. chioma
Area insidenza c.
Risultati
Area 2 in corso di elaborazione
Area 3
Area 1
2007
2017
Rovo
Area
recintata
Ortofoto anno 2013
Variabile
Area 1
Area 3
2007 2017 2007 2017
Num. piante
35
37
82
45
Num. piante/ha
124
131
185
102
-
-
50
45
Num. piante (escluse zone con rovo e vicine la rete)
Numero di piante
15
Area 3
10
Dimensione del fusto delle piante
misurate nel 2007 ma non rilevate
nel 2017 da ZEB 1
5
(per lo più giovani ricacci e nuovi innesti)
0
3
6
9
12
15
Classe diametrica (cm)
Posizionamento dei castagni: differenze in metri tra 2007 e 2017
Area
Minimo
Massimo
Media
DS
1
0,3
8,3
1,6
1,6
3
0,5
4,7
1,7
1,0
Area 1
120
120
Diametro
R² = 0.9965
Diametro
R² = 0.9961
100
ZEB1 (cm)
100
ZEB1 (cm)
Area 3
80
60
40
80
60
40
20
20
0
0
0
20
40
60
80
100
0
120
Misurato (cm)
Misurato (cm)
20
Altezza totale
R² = 0.9471
15
ZEB1 (m)
ZEB1 (m)
20
Altezza totale
R² = 0.9792
15
10
10
5
5
0
0
0
5
10
15
0
20
5
10
6
6
Altezza inserzione chioma
R² = 0.9915
5
15
20
25
Misurato (m)
Misurato (m)
Altezza inserzione chioma
R² = 0.9285
5
4
ZEB1 (m)
ZEB1 (m)
120
100
80
60
40
20
3
2
1
4
3
2
1
0
0
0
1
2
3
Misurato (m)
4
5
6
0
1
2
3
Misurato (m)
4
5
6
Area 1
120
300
Area insidenza chioma
R² = 0.0733
Area insidenza chioma
R² = 0.1664
250
ZEB1 (m2)
100
ZEB1 (m2)
Area 3
80
60
40
20
200
150
100
50
0
0
0
20
40
60
80
100
120
50
0
Misurato (m2)
100
200
150
250
300
Misurato (m2)
Tempi di rilievo (minuti/ha)
Area 1
Fusto e
chioma 3D
Area 3
2007
2017
2007
2017
109
54
117
47
Conclusioni
PLS ZEB1 ha dimostrato elevate prestazioni nei casi esaminati
Metodo potenzialmente adatto per aree di particolare pregio - castagneti IGP
Informazioni di dettaglio per la gestione e il monitoraggio - precision forestry
Principali limiti riscontrati:
piante piccole sono difficili da identificare
differenze tra area insidenza ZEB1 e metodo classico (effetto potature?)
elaborazione dati ZEB1 richiede
competenze tecniche specializzate
dotazioni
hardware
potenti
e
È necessario proseguire la sperimentazione in ambienti diversi - IGP e/o DOP
Possibili sviluppi futuri
DTM ad altissima risoluzione
stima volume e biomassa
stima incrementi (D, H, V)
(Aggiornato al 29/9/16)
stima produzione castagne
integrazione PLS/TLS/Drone
Produzione di castagne a livello di singola pianta
(fonte: Piccioli, 1922)
D1,3 m
IGP
DOP
Kg castagne fresche/pianta
Ottima
Buona
Mediocre
15-25
15
11
7
25-45
45
20
12
40-80
65
49
27
80-100
65
48
21
TLS Faro
eBee Ag Sense Fly - RGB + NIR
Ottocottero - LiDAR Yellowscan
Ringraziamenti
L. Fazzi, F. Caselli, P. Franchi
[email protected]