Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
2.1) Introduzione.
Quando un transistore viene analizzato limitatamente ad una situazione di piccoli segnali le
sue caratteristiche possono normalmente essere linearizzate nell'intorno del punto di lavoro.
Nei circuiti di commutazione tuttavia i dispositivi vengono pilotati al di fuori della zona attiva
e i segnali in gioco non possono piu' essere considerati, ne' in ingresso, ne' in uscita, piccoli segnali.
I modelli incrementali allora non sono piu' un'approssimazione ragionevole e al limite non possono
venir utilizzati nemmeno se il funzionamento del transistore rimane tutto all'interno della regione
attiva. E' necessario rivolgersi ad altri modelli che approssimino il comportamento non lineare del
dispositivo in condizione di segnali ampi.
Limitatamente a condizioni di lavoro a bassa frequenza esistono diversi modelli atti allo
scopo; tuttavia, in particolare per il transistore bipolare a giunzione, questi modelli trascurano
completamente quelle componenti delle correnti che vanno a modificare la concentrazione dei
portatori di carica in eccesso accumulati nel transistore stesso rispetto a quella in equilibrio termico.
Inoltre, nella quasi totalita' dei casi, questi modelli partono dall'ipotesi che lo spessore della base o
la lunghezza del canale sia costante, indipendentemente dalle condizioni operative e molto spesso
trascurano le cadute di tensione dovute ai contatti e alle regioni neutre.
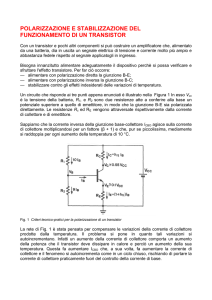
2.2) Il transistore a giunzione.
Si consideri il semplice modello monodimensionale di un transistore a giunzione riportato in
figura 2.1, nell'ipotesi che le diverse regioni costituenti il transistore siano regioni omogenee.
V BE
IE
VBC
+
-
+
emettitore
base
collettore
n
p
n
IC
IE
IC
VBE
VBC
IB
W
X'
X"
IB
zone di svuotamento
giunzioni
figura 2.1
Il principale effetto delle tensioni applicate alle due giunzioni del transistore consiste, come e'
noto, in una variazione dei portatori di minoranza ai bordi delle regioni di carica spaziale. In una
giunzione pn con basso livello di iniezione, quali quelle che si stanno considerando, la
concentrazione dei portatori di minoranza ai due lati della giunzione e':
p n = p no .e
n p = n po .e
31
qV
kT
qV
kT
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
con k costante di Boltzmann, q carica dell'elettrone, V tensione applicata alla giunzione, T
temperatura assoluta e npo e pno concentrazione dei portatori minoritari in condizioni di equilibrio.
Pertanto nello spazio di base la concentrazione dei portatori minoritari in eccesso rispetto alle
condizioni di equilibrio in corrispondenza alla giunzione di emettitore (x = 0) e':
q.Vbe
n 'b (0) = n bo . e k .T − 1
mentre quella alla giunzione di collettore (x = w) e':
qk.V.Tbc
n (w ) = n bo . e
− 1
'
b
Ovviamente analoghe relazioni si hanno nelle regioni di emettitore e di collettore a ridosso
delle giunzioni.
qk.V.Tbe
qk.V.Tbc
'
p (0) = p eo . e
− 1
p c (0) = p co . e
− 1
Le tensioni d polarizzazione Vbe e Vbc determinano percio', in corrispondenza alle giunzioni,
delle concentrazioni di portatori minoritari diverse da quelle di equilibrio e determinano altresi' una
distribuzione non uniforme di tali portatori nella base del transistore, dando luogo a una corrente di
diffusione. L'andamento della concentrazione puo' essere determinato risolvendo l'equazione di
diffusione
d 2n b n b
Db. 2 =
dx
τb
'
e
con le condizioni al contorno n 'b (0) e n 'b (w ) , dove Db e τb sono rispettivamente la costante di
diffusione dei portatori di minoranza e il loro tempo medio di vita nella base.
Una semplice soluzione di tale equazione si puo' ottenere osservando che in tutti i transistori
solamente una piccola frazione dei portatori minoritari iniettati in base si ricombina, in quanto la
base e' estremamente sottile e debolmente drogata. In prima approssimazione pertanto la
ricombinazione nello spazio di base si puo' trascurare e l'equazione diviene:
Db .
d2nb
dx 2
=0
Si vede immediatamente che in queste ipotesi la concentrazione dei portatori minoritari nello
spazio di base varia linearmente con la posizione nella base stessa e l'andamento della
concentrazione dei portatori in eccesso rispetto alla condizione di equilibrio e':
qk.V.Tbe
x
qk.V.Tbc
w−x
n (x ) =
.n bo . e
− 1 + .n bo .. e
− 1
w
w
'
b
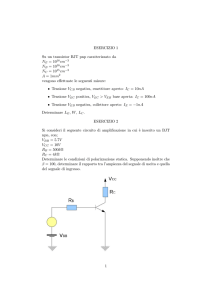
Tale andamento e' illustrato in figura 2.2; in tale figura e' riportato anche l'andamento
qualitativo della distribuzione esatta, che, tranne che agli estremi (per x = 0 e x = w), per effetto del
32
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
piccolo ammontare della ricombinazione, sta sempre al di sotto di quella calcolata nelle ipotesi
semplificative in cui ci si e' messi.
n
,
n b(0)
approssimazione lineare
distribuzione esatta
,
n b(w)
0
w
figura 2.2
x
La distribuzione trovata e' valida ovviamente anche quando la polarizzazione delle giunzioni
e' inversa. In tal caso, purche'
q .V
e k .T
<< 1
cioe' quando la polarizzazione inversa e' di almeno di qualche centinaio di millivolt, la
concentrazione a ridosso della giunzione diviene:
n 'b = − n bo
Nelle regioni di emettitore e di collettore, che normalmente sono ampie rispetto alla lunghezza
di diffusione si ottiene:
x'
q.Vbe
−
p x = p eo . e kT − 1.e Le
x"
q .Vbc
kT
− Lc
'
"
− 1.e
p c x = p co . e
'
e
( )
'
( )
con Le e Lc lunghezze di diffusione rispettivamente nell'emettitore e nel collettore.
La corrente totale che fluisce in ciascuna giunzione e' determinata dalla somma della corrente
di elettroni e lacune a tale giunzione. Se si puo' formulare l'ipotesi, d'altra parte realistica, che nelle
zone di carica spaziale la ricombinazione sia trascurabile, la densita' di corrente totale in ciascuna
giunzione e' la somme delle correnti dei portatori di minoranza ai margini della regione di carica
spaziale, poiche' si e' supposto che le regioni del transistore siano omogenee, tali correnti sono le
correnti di diffusione.
Considerato pertanto un transistore la cui area di giunzione sia A, si ottiene:
dn 'b
I e = q.A. − D b .
dx
33
dp 'e
− De
dx '
x =0
x '= 0
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
dn 'b
I c = q.A. − D b .
dx
x=w
dp 'c
− De
dx" x "=0
Poiche' le concentrazioni che appaiono nelle precedenti relazioni sono linearmente dipendenti
dai fattori di tensione
qk.V.Tbe
e
1
−
qk.V.Tbc
e
1
−
e
anche i loro gradienti e di conseguenza le correnti terminali Ie e Ic sono dipendenti dagli stessi
fattori. Si puo' in definitiva scrivere che:
Vbc
Vbe
q.kT
q.kT
I e = I es . e
− 1 − α R .I cs . e
− 1
(2.2.1)
I e = −α F .I es . e
q .Vbe
kT
− 1 + I cs . e
q .Vbc
kT
− 1
dove Ies, Ics, αR e αF sono delle costanti il cui valore dipende dalle costanti di diffusione, dalla
lunghezza di diffusione, dalle concentrazioni di equilibrio dei portatori di minoranza, dall'area e
dallo spessore della base.
Le relazioni appena ricavate sono le gia' note relazioni di Ebers-Moll, valide per qualsiasi
transistore in cui le cadute di tensione siano trascurabili eccetto che in corrispondenza alle
giunzioni, in cui la distribuzione dei portatori sulla giunzione sia uniforme e tali che tutte le
componenti della corrente di emettitore e di collettore che non attraversino la giunzione siano
trascurabili.
L'osservazione delle relazioni trovate per le correnti terminali permette di trarre alcune
importanti conclusioni. Le quattro costanti Ies, Ics, αR e αF sono moltiplicate ciascuna per i fattori di
tensione che dipendono da Vbe e Vbc e dipendono d'altra parte dalle concentrazioni di equilibrio dei
portatori minoritari a ridosso delle giunzioni. Poiche' tali concentrazioni sono proporzionali al
quadrato della concentrazione ni dei portatori nel semiconduttore intrinseco, ciascuna delle costanti
Ies e Ics conterra' come fattore n 2i . Senza considerare i valori precisi dei quattro coefficienti che
compaiono nelle (2.2.1) si possono dedurre due conseguenze per quanto riguarda il comportamento
del transistore ad ampi segnali.
• Le correnti di emettitore e di collettore dipendono da ambedue le tensioni emettitore-base e
collettore base.
• Per tensioni fisse le correnti terminali sono proporzionali a n 2i e quindi sono fortemente
dipendenti dalla temperatura.
Benche' tutta la trattazione precedente sia stata condotta a partire da un modello
monodimensionale del transistore, le equazioni di Ebers-Moll sono valide per qualsiasi transistore a
34
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
basso livello di iniezione, che abbia cadute trascurabili eccetto che alle giunzioni e senza riguardo
alla sua struttura. E' sufficiente che le superfici di giunzione di emettitore e di collettore siano tali
che la distribuzione dei portatori sia uniforme e che le componenti di corrente di emettitore e
collettore attraversino tali superfici.
Le equazioni di Ebers-Moll soddisfano le condizioni di reciprocita' in quanto i coefficienti di
accoppiamento incrociato α R . I cs e α F . I es sono uguali. Ci si rende conto della plausibilita' di questa
affermazione considerando la forma della (2.2.1) quando le tensioni di polarizzazione Vbe e Vbc
sono piccole in rapporto al termine kT/q. In tal caso, espandendo in serie e troncando al primo
termine si ha:
q
q
I e = I es . .Vbe − α R .I cs . .Vbc
kT
kT
(2.2.2)
q
q
I e = −α F .I es . .Vbe + I cs .
.Vbc
kT
kT
Si vede pertanto che il transistore, quando le tensioni alle giunzioni sono piccole si comporta
come un dispositivo lineare. D'altra parte per tensioni applicate sufficientemente basse ci si puo'
aspettare che il transistore si comporti come un materiale passivo cui afferiscano tre terminali, e
quindi soddisfi i principi di linearita' e reciprocita'.
La linearita', come detto, e' evidenziata dalle (2.2.2), mentre la reciprocita' richiede che:
α R . I cs = α F . I es
Poiche' le quantita' che compaiono in questa relazione non dipendono dalle tensioni alle
giunzioni, essa si puo' ritenere applicabile per qualsiasi tensione di polarizzazione, di arbitraria
ampiezza e segno. E' ovvio che la condizione di reciprocita' puo' essere confermata valutando
direttamente i coefficienti delle equazioni di Ebers-Moll.
Infine poiche'
I b = −(I e + I c )
e' evidente che anche la corrente di base dipende linearmente dai fattori di tensione.
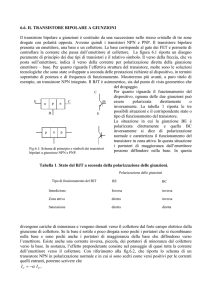
Delle due equazioni che descrivono le caratteristiche voltamperometriche di un transistore
ideale puo' essere data una semplice e vantaggiosa interpretazione circuitale, che si avvale di due
generatori comandati e di due diodi ideali a caratteristica esponenziale. Tale modello e' riportato in
figura 2.3.
35
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
α RI
R
E
α FI F
IF
IR
I ES
C
I CS
B
figura 2.3
IES e ICS sono rispettivamente le correnti di saturazione dei due diodi di emettitore e di
collettore.
Questo modello ha una semplice interpretazione in termini di funzionamento interno del
transistore. Le correnti di emettitore e di collettore possono essere ambedue risolte in due
componenti. Quella che fluisce nel diodo e' la conseguenza dell'iniezione di portatori minoritari
nella corrispondente giunzione, mentre quella fornita dal generatore di corrente e' la conseguenza
dell'iniezione all'altra giunzione di portatori di minoranza, che per diffusione giungono all'altra
giunzione attraversando l'intera base. In tal modo la componente della corrente di emettitore
Vbe
q.kT
I F = I ES . e
− 1
deriva dall'azione del diodo alla giunzione di emettitore, mentre la seconda componente pari a
q.Vcb
− α R .I CS . e
kT
e' conseguenza dell'azione del diodo alla giunzione di collettore ed esiste in quanto una frazione αR
della corrente del diodo e' trasportata attraverso la base all'emettitore dove contribuisce alla corrente
totale. Analoghe considerazioni possono venir fatte per la corrente totale di collettore.
Se la regione di base viene resa molto larga in rapporto alla lunghezza di diffusione1 la
frazione della corrente del diodo che attraversa la base senza ricombinarsi diviene molto piccola
(cioe' divengono molto piccoli i coefficienti αR e αF) e il modello del transistore degenera in due
diodi contrapposti con catodo o con anodo comune.
I quattro coefficienti che compaiono nel modello di Ebers-Moll hanno una semplice
interpretazione fisica suggerita dal modello circuitale a due diodi. Se i terminali di base e di
collettore vengono cortocircuitati, la caratteristica voltamperometrica dei terminali di emettitore e di
base e' quella ideale di un diodo a giunzione che abbia una corrente di saturazione pari a IES. Inoltre
il rapporto tra la corrente di collettore e quella di emettitore e' in queste condizioni - αF. Percio' IES
Si ricordi che la lunghezza di diffusione e' la lunghezza L sulla quale la concentrazione dei portatori minoritari si
riduce secondo il fattore 1/e = 0,37. Essa e' legata alla costante di diffusione D e al tempo medio di vita τ dei portatori
minoritari dalla relazione L = D.τ
1
36
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
e' la corrente di saturazione in cortocircuito della giunzione di emettitore, mentre il coefficiente
αF e' detto guadagno diretto di corrente in cortocircuito. Analoghe considerazioni si applicano
alla corrente di collettore, con emettitore e base cortocircuitati. ICS e' la corrente di saturazione in
cortocircuito della giunzione di collettore, αR e' detto guadagno inverso di corrente in
cortocircuito. αF e αR sono ambedue minori dell'unita' sia perche' non tutta la corrente iniettata alla
giunzione si compone di portatori minoritari, sia perche' non tutti i portatori minoritari iniettati in
base raggiungono l'altra giunzione in quanto esiste sempre una sia pur piccola ricombinazione.
2.2.1) Le regioni di operazione.
Il modello di Ebers-Moll descrive il comportamento esterno del transistore in corrispondenza
a qualsiasi condizione di polarizzazione. In molte applicazioni tuttavia la struttura del circuito limita
il campo di operazione rendendo possibile semplificare il modello non lineare. Di solito le
caratteristiche voltamperometriche del transistore vengono divise in quattro regioni di operazione
definite in base allo stato delle tensioni di polarizzazione delle due giunzioni. Per ciascuna di tali
regioni e' opportuno prendere in esame la forma semplificata del modello di Ebers-Moll.
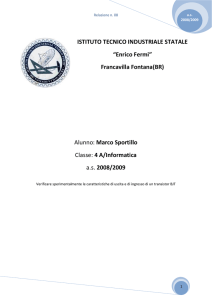
a) Regione di interdizione.
La regione operativa individuata quando ambedue le giunzioni sono polarizzate inversamente
prende il nome di regione di interdizione. Nello spazio di base la concentrazione dei portatori
minoritari in eccesso rispetto alla condizione di equilibrio e' praticamente pari a -nbo, come
illustrato in figura 2.4 (a), e le correnti terminali sono costanti e in sostanza indipendenti dalle
tensioni applicate, quando esse siano di ampiezza pari a qualche volta kT/q.
Il modello approssimato e' in tal caso, tenendo conto delle
Vbe << −
k. T
q
Vbc << −
e
k. T
q
e della condizione di reciprocita', quello illustrato in fig. 2.4 (b).
,
pe
x
,
,
pc
nb
,
0
w
0 0
-p
eo
x"
x
(a)
-pco
-n bo
(1 - α F).I ES
(1 - α R).I CS
E
C
figura 2.4
B
37
(b)
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
b) La regione normale (o attiva).
Un transistore opera nella regione normale quando la giunzione di emettitore e' polarizzata
direttamente, mentre quella di collettore e' polarizzata inversa. Molto spesso tale regione e' chiamata
anche attiva.
Il profilo di concentrazione dei portatori minoritari in base e' illustrato in figura 2.5
.
,
e
p
pc,
,
n b (0 )
pe (0 )
x
,
b
n
,
0
w
0 0
x"
x
-n bo
-pco
figura 2.5
Se la tensione inversa applicata alla giunzione di collettore e' sufficientemente grande da
rendere trascurabile il termine esponenziale rispetto all'unita', le equazioni voltamperometriche per
ampi segnali diventano:
Vbe
q.kT
I e = I ES . e
− 1 + α R .I CS
q.Vbe
I c = −α F .I ES . e kT − 1 − I CS = −α F .I e − (1 − α F α R ).I CS
Tali equazioni possono venir rappresentate indifferentemente da uno dei due modelli circuitali
illustrati in figura 2.6. In essi e' stato introdotto il parametro Ico, corrente di saturazione di collettore
a emettitore aperto, pari a:
I co = (1 − α F α R ).I cs
38
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
αF
1
IbI co
1 - αF
1 - αF
α RI CS
α FI e + Ico
E
Ie
B
C
Ib
Ic
C
Ic
I ES
α RI CS
B
I ES
E
a) generatori comandati dalla corrente di emettitore
a) generatori comandati dalla corrente di base
figura 2.6
Frequentemente i generatori di corrente in parallelo con i diodi ideali possono essere trascurati
poiche' danno un contributo alla corrente totale trascurabile rispetto alle correnti tipiche di
emettitore delle regione attiva.
c) La regione inversa.
Quando la giunzione di collettore viene polarizzata direttamente mentre quella di emettitore e'
polarizzata inversamente ci si trova ad operare nella regione inversa. Il comportamento del
dispositivo e' essenzialmente quello della regione attiva eccetto che il collettore e l'emettitore si
scambiano i ruoli e corrispondentemente variano la distribuzione interna dei portatori minoritari in
base e il modello ad ampi segnali.
C'e' tuttavia da rilevare che normalmente αR e' notevolmente minore che non αF sia perche'
l'efficienza dell'iniezione dei portatori e' di solito diversa per le due giunzioni in quanto collettore e
emettitore sono di solito drogati differentemente, sia perche' in parecchi transistori l'area della
giunzione di collettore e' maggiore che non quella della giunzione di emettitore, in modo che il
guadagno diretto di corrente αF sia il piu' grande possibile. Di conseguenza una frazione piuttosto
grande dei portatori iniettati in base dalla giunzione di collettore, che in questo caso e' polarizzata
direttamente, si ricombina nella base e non viene raccolta dalla giunzione di emettitore rendendo il
guadagno inverso di corrente αR piuttosto basso.
d) La regione di saturazione.
L'operazione in regione di saturazione si ottiene quando ambedue le giunzioni vengono
polarizzate direttamente. La concentrazione dei portatori minoritari nello spazio di base e' in questo
caso sempre maggiore di quella all'equilibrio, poiche' ambedue le giunzioni iniettano tali portatori
nella base stessa. L'andamento e' illustrato in figura 2.7.
L'andamento della concentrazione puo' tuttavia essere scomposto in due profili (figura 2.7),
corrispondenti rispettivamente all'operazione normale e a quella inversa. Anche le correnti terminali
possono essere divise in componente normale e inversa, tenendo presente che le relazioni tra
correnti e carica in eccesso sono relazioni lineari.
Di conseguenza l'operazione nella regione di saturazione puo' essere considerata come la
sovrapposizione di operazioni nella regione normale e in quella inversa.
39
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
,
,
,
pe n
b
x
pc
componente
normale
,
0
x"
w x
0 0
componente
inversa
figura 2.7
Si noti tuttavia che le tensioni terminali non possono essere considerate derivate dalla
sovrapposizione di componenti normali e inverse poiche' la relazione tra densita' di carica in eccesso
e tensione di polarizzazione e' fortemente non lineare. Per questo motivo il modello nella regione di
saturazione non puo' venir semplificato e deve essere utilizzato il modello completo.
In alcuni casi e' conveniente dividere la regione di saturazione in due regioni a sua volta.
Queste sono la regione di saturazione diretta, in cui la giunzione di emettitore e' polarizzata
direttamente piu' che non quella di collettore, e la regione di saturazione inversa in cui e' la
giunzione di collettore ad essere polarizzata direttamente piu' che non quella di emettitore.
2.2.2) Circuito equivalente ad ampi segnali di un transistore a giunzione.
Un circuito equivalente ad ampi segnali di un transistore a giunzione, che include tutti i
parametri che influenzano il suo funzionamento e che puo' venir derivato dal modello di Ebers-Moll
e' illustrato in figura 2.8.
α r i c1
E
ie
α f i e1
C TE
reb' i e1
i c1
i e2
C DE
C TC
r cb'
i c2
B'
r bb'
i
B
figura 2.8
40
C CD
ic
C
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Di tutti i parametri verranno presi in considerazione di volta in volta solo quelli che
influenzano il funzionamento in una determinata regione di operazione.
I diodi rappresentativi delle giunzioni di emettitore e di collettore sono stati sostituiti dalle
resistenze non lineari reb' e rcb'. Quando le giunzioni sono polarizzate direttamente esse possono
venir sostituite con il loro modello linearizzato costituito da una resistenza r in serie con un
generatore di tensione Vo. Come e' noto a 25° C il valore di r e' dato da
r=
k. T
q. I
k. T
= 26 mV
q
con
dove I e' la corrente diretta della giunzione espressa in milliampere.
Le due capacita' CD di diffusione sono dei parametri direttamente proporzionali alle correnti
dirette delle giunzioni e normalmente di valore nettamente superiore alle capacita' di transizione CT
delle stesse giunzioni. In polarizzazione diretta pertanto le capacita' di transizione possono venir
trascurate.
La capacita' di diffusione della giunzione di emettitore, direttamente proporzionale alla
corrente di emettitore, e la costante di tempo
τ αF = rE . C DE
definiscono la frequenza angolare di taglio del transistore nella regione attiva
ω αF =
1
τ αF
mentre τ αR = rC . C CD definisce la frequenza angolare di taglio nella regione inversa
ω αR =
1
τ αR
αF e αR possono quindi essere considerate funzione della frequenza conglobando in esse
l'effetto delle capacita' di diffusione.
In polarizzazione inversa e' invece necessario tener conto delle capacita CTE e CTC, che
dipendono dalla tensione inversa applicata alla giunzione. Tuttavia tali capacita' dipendono dalla
tensione inversa applicata alla giunzione. All'aumentare di tale tensione aumenta lo spessore della
zona di carica spaziale e diminuisce la capacita' di transizione.
In generale per la capacita' di transizione il legame tra tensione applicata e valore della
capacita' stessa si puo' ritenere del tipo:
Ct
CT =
n
Vj + δ
dove Vj e' la polarizzazione inversa della giunzione, δ e' il potenziale di contatto della giunzione in
assenza di tensioni applicate dall'esterno (0,2 - 0,4 V) e n dipende dal tipo di giunzione.
Per giunzioni realizzate secondo vecchie tecnologie, come ad esempio per le giunzioni a lega,
n=1/2, per quelle ad accrescimento o diffuse n=1/3, mentre per quelle realizzate in tecnologia
planare epitassiale n=1/10. Per giunzioni di quest'ultimo tipo pertanto la capacita' di transizione si
puo' ritenere praticamente indipendente dalla tensione applicata. Indicando con CT(E) il valore della
41
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
capacita' di transizione misurato in condizioni di piccoli segnali ad una specifica tensione inversa E
si ha quindi che:
E+δ
C T (Vj ) = C T (E ).
Vj + δ
n
che per δ << E, Vj puo' venir semplificata in
E
C T (Vj ) ≅ C T (E ).
Vj
n
Se ad esempio per un transistore a lega si avesse con E = 8 V una CT(E) = 40 pF, allora per Vj
= 2 V la capacita' di transizione sarebbe pari a
CT =40.
8
= 80 pF
2
Si tenga ora presente che quando si commuta da esempio dall'interdizione alla conduzione la
tensione inversa applicata alla giunzione di collettore varia da un valore relativamente alto Vj1 ad
una polarizzazione inversa o addirittura ad una lieve polarizzazione diretta Vj2. La capacita' di
transizione su questo intervallo di tensione puo' variare notevolmente. In tal caso e' conveniente
tener conto di questa variazione tramite il valor medio integrale della capacita' di transizione,
definito come
j1
(δ + Vj1 ) − (δ + Vj1 ) .(δ + Vj2 )
1
Ct
C Ti =
.∫
.dVj = C T (Vj1 ).
n
∆V Vj 2 V + δ
∆V.(1 − n )
V
n
1− n
j
Qualora il potenziale di contatto possa venir trascurato si ottiene:
1− n
Vj2
1−
Vj1
C Ti = C T (Vj1 ).
Vj 2
(1 − n ).1 −
Vj1
Se ad esempio si avesse Vj2 = 0,1.Vj1 si otterrebbe per:
n=1/2
n=1/3
n=1/10
CTi = 1,52 CT (Vj1)
CTi = 1,3 CT (Vj1)
CTi = 1,08 CT (Vj1)
Nel caso particolare di commutazione da interdizione a saturazione (Vj2 ≅ 0 ) la precedente
relazione si riduce a:
42
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
C Ti ≅
C T (Vj1 )
1− n
e la capacita' media integrale assume il valore
n=1/2
n=1/3
n=1/10
CTi = 2 CT (Vj1)
CTi = 1,5 CT (Vj1)
CTi = 1,11 CT (Vj1)
2.2.3) I tempi di commutazione.
Come si e' precedentemente accennato, in un interruttore ideale i tempi di commutazione sono
nulli. Per gli interruttori ideali, al contrario, il tempo di commutazione, per quanto piccolo 3e'
sempre finito.
In figura 2.9 sono evidenziati i tempi di commutazione di un transistore a giunzione sia per
quanto riguarda il passaggio dall'interdizione alla saturazione che viceversa.
Quando il transistore e' portato in conduzione a partire da uno stato di interdizione si ha un
ritardo iniziale pari a td prima che la corrente di collettore inizi a fluire; tale tempo dipende dalle
capacita' di transizione di emettitore e di collettore e dalla tensione inversa della giunzione di
emettitore immediatamente prima dell'applicazione del segnale di comando. Quanto maggiore e' la
tensione inversa e tanto maggiore e' il tempo di ritardo.
Il tempo di salita tr dipende invece dai parametri ad alta frequenza del transistore e dal
pilotaggio di base.
Quando il segnale di comando Vin ritorna allo stato iniziale, se il transistore era stato
precedentemente portato in saturazione, la corrente di collettore continua a scorrere per un periodo
ts, detto tempo di restituzione, che aumenta all'aumentare di β e del pilotaggio di base.
Vin
+V
Rc
t
Vce
90%
Vce
Vin
10%
t
td tr
ts
tf
figura 2.9
Infine il tempo di discesa tf dipende, come il tempo di salita, dai parametri ad alta frequenza
del transistore e dal pilotaggio di base.
Al solito tempo di salita e tempo di discesa vengono definiti come il tempo necessario
affinche' la corrente di collettore vari tra il 10% e il 90% del suo valor massimo e viceversa.
43
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
a) Commutazione in regione attiva.
In figura 2.10 e' riportato lo schema di un transistore utilizzato come interruttore nella
configurazione ad emettitore comune (a) assieme al relativo circuito equivalente (b).Per semplicita'
si e' considerata una resistenza di carico molto piccola, in modo da rendere trascurabili gli effetti
reattivi del carico. Nel caso che si sta esaminando la capacita' di transizione CTE si trova in parallelo
con quella di diffusione CDE e pertanto puo' essere trascurata poiche' CTE << CDE. Allo stesso
modo, per le ipotesi in cui ci si e' posti, si puo' trascurare l'effetto della capacita' CTC e della
resistenza di carico RL, mentre la corrente di perdita si supporra' talmente piccola da poter essere
ignorata.
Il transistore sia pilotato da un generatore di tensione Es attraverso una resistenza esterna RB.
Al transistore venga applicato all'istante to un gradino di tensione tra zero e il valore Es1M, tale da
portarlo al limite della saturazione, rimanendo pero' il punto di lavoro nella regione attiva.
All'istante di applicazione del gradino la capacita di diffusione rappresenta un cortocircuito e la
corrente diretta di base assume il suo valore massimo pari a:
I B1M =
E s1M
= ∆I B
R B + rBB'
C TC
RB
RL
r BB'
B
iC
B'
iB
RB
Ec
es
es
VBE
C
CTE C
DE i EC
VB'E
rE
i ER
αFi
ER
RL
Ec
iE
(b)
(a)
figura 2.10
Dall'esame del circuito equivalente si deduce immediatamente che la variazione della corrente
di emettitore ∆iE e' uguale a ∆iB in quanto, essendo iER = 0 anche iC = 0. Le condizioni iniziali sono
evidenziate nelle forme d'onda riportate in figura 2.11.
A partire dall'istante to la tensione VB'E inizia a salire con costante di tempo pari a:
τ E = rE . C DE =
1
ω αF
Le correnti iC e iE aumentano allo stesso modo, mentre iB diminuisce. Se la tensione Es1M
viene applicata per un tempo sufficientemente lungo le correnti di base, emettitore e collettore
raggiungono i loro valori di regime IB1, IEM e ICM, che dipendono solo dalle condizioni di lavoro in
continua dei circuiti di ingresso e di uscita.
44
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Assumendo ora che all'istante t1 la tensione di ingresso ricommuti da Es1M a zero, risulta
evidente che la corrente di base diminuisce di una quantita' pari a ∆iB, mentre la corrente di
emettitore varia della stessa quantita'. Come risultato si ha un flusso inverso di corrente pari a:
I B2 M =
VB'E
R B + rBB'
dove VB'E e' la tensione presente immediatamente prima della commutazione verso l'interdizione. A
partire dall'istante t1 la tensione VB'E diminuisce esponenzialmente con costante di tempo τE e
anche tutte le altre correnti si portano verso lo zero allo stesso modo.
e
E
s
t
t1
o
s1M
t
iB
-E
s2M
I B1M
∆ iB
I
I
iE
I' B2M
B1
t
B2M
I EM
- ∆ iB
- ∆ i'B
∆ iE = ∆ i B
t
ic
I CM
90%
10%
t
t
t'f
r
t
f
figura 2.11
E' interessante notare che quando il transistore e' pilotato attraverso una resistenza RB >> rBB'
la corrente di base e' praticamente un'onda quadra.
Nelle condizioni illustrate i due tempi tr e tf di salita e di discesa sono uguali. Il tempo di
discesa tf puo' tuttavia essere materialmente ridotto applicando una tensione inversa al circuito di
ingresso (tali condizioni sono evidenziate in figura 2.11 dagli andamenti a tratteggio).
Se ad esempio la tensione di ingresso variasse tra Es1M e -Es2M, allora all’istante t1 fluirebbe
una corrente inversa di base I 'B2 M maggiore che non nel caso precedente. La tensione VB'E
decrescerebbe ancora esponenzialmente, con costante di tempo τE, ma la maggior variazione
iniziale ∆'iE della corrente di emettitore e la maggior corrente inversa di base darebbero luogo ad un
45
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
tempo di discesa t'f < tf. Tanto maggiore e' la corrente inversa nell'istante di commutazione
all'interdizione e tanto minore e' il tempo di discesa.
Allo stesso modo puo' essere ridotto il tempo di salita tr aumentando la tensione Es1M durante
la commutazione in conduzione, ma in tal caso il punto di lavoro entra nella regione di saturazione.
Se poi la resistenza di carico RL non e' trascurabile, come si e' supposto inizialmente, e'
necessario tener conto dell'effetto della capacita' di transizione CTC. Le considerazioni fatte tuttavia
rimangono identiche, ma la corrente di collettore varia piu' lentamente per effetto della costante di
tempo (R L + rE ).C TC .
b) Commutazione nella regione di saturazione.
Al paragrafo precedente e' stato fatto notare che il tempo di salita' puo' essere ridotto portando
il punto di lavoro nella regione di saturazione. Il tempo di salita tr infatti viene diminuito poiche' la
corrente di collettore che tende al valore I'CM = βo.IB1M viene limitata dalla resistenza di carico RL
al valore ICM = βo.IBs, come illustrato in figura 2.12.
es
t2
E s1M
to
t1
t
E s2M
E
iB
I B1M
I BS
t
iC
τ
I B2M
,
I CM
I CM
90%
A
10%
t
ts
tr
tf
β o I B2M
τ
τs
figura 2.12
46
B
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
In figura 2.13 e' riportato il circuito equivalente relativo alla regione di saturazione, in cui,
come si vede, compaiono sia i parametri della regione attiva che di quella inversa.
αFi
ER
RB
r BB'
B
C TC
iC
B'
iB
C
i ER
i EC
es
i CC
rE
CDE
iE
αR i CR
rc
RL
i CR
Ec
figura 2.13
Quando ci si trova al limite della saturazione VCE = VBE, cioe' VCB = 0; con un ulteriore
aumento della corrente di base il punto di lavoro entra nella regione di saturazione dove ambedue le
giunzioni di emettitore e di collettore sono polarizzate direttamente e la corrente di collettore rimane
praticamente costante.
Non appena la giunzione di collettore e' polarizzata direttamente in base vengono iniettati
portatori di minoranza addizionali anche dal lato collettore e quindi in condizioni di saturazione
nella base e' presente un numero di portatori minoritari maggiore di quello necessario a raggiungere
il valore ICM. Questi portatori in eccesso hanno un largo effetto sul comportamento del transistore
durante la commutazione all'interdizione. Dopo tale commutazione infatti i portatori in eccesso
devono venir rimossi dallo regione di base.
Con riferimento al circuito equivalente cio' significa che la capacita' di diffusione CDE deve
venir scaricata e cio' avviene con una costante di tempo ts che dipende sia dai parametri diretti che
da quelli inversi ωαF, ωαR, αF, αR.Tale scarica e' rappresentata in figura 2.12 dall'andamento
esponenziale (A).
La corrente di collettore si mantiene pertanto approssimativamente costante finche' all'istante
t2 i portatori in eccesso vengono eliminati dalla base. Per tempi superiori a t2 e' valido il normale
circuito equivalente della regione attiva e la corrente di collettore decresce esponenzialmente (B)
con costante di tempo τ = rECDE.
Appare chiaro dalle forme d'onda di figura 2.12 che il tempo di restituzione ts puo' venir
ridotto aumentando la corrente inversa IB2M.
47
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
2.2.4) Il calcolo dei tempi di commutazione.
a) Commutazione in regione attiva.
a1) Pilotaggio a bassa impedenza.
Con riferimento al circuito equivalente di figura 2.14, si consideri il caso della commutazione
da interdizione a conduzione. In serie con emettitore, base e collettore siano inserite le tre resistenze
RE, RB e RL. Per semplicita' le correnti di perdita e l'effetto della resistenza di carico RL e della
capacita' CTC verranno trascurati.
C TC
RB
r BB'
B
iC
B'
iB
C
αF iE
CDE
rE
C
E
es
RL
r
Ec
iE
figura 2.14
Ricordando che iB = iE - iC = (1 - αF).iE e definendo
Z E (s ) =
rE
1 + s.τ αF
con
τ αF = rE .C DE
si ha:
es (s ) = [Z E (s ) + R E ].i E (s ) + (rBB ' + R B ).i B (s )
i B (s ) = [1 − α F (s )].i E (s )
Il fattore di amplificazione di corrente αF(s) e' dato da:
α F (s ) =
α F0
1 + s.τ αF
dove αF0 e' il valore a bassa frequenza di αF.
Risolvendo le precedenti equazioni quando in ingresso viene applicato un gradino di ampiezza
Es1M, si ottiene, dopo l'antitrasformazione:
48
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
i E (t ) =
α .(R + r ) − rE − τt
E s1M
.1 − F 0 B BB'
.e
R E + rE + (R B + rBB' )(
. 1 − α F0 )
rBB' + R B + R E
t
−
α F0 .E s1M
τ
i C (t ) =
.1 − e
R E + rE + (R B + rBB ' )(
. 1 − α F0 )
(2.2.3)
t
−
α F0 .R E + rE
E s1M
τ
i B (t ) =
.1 − α F0 +
.e
R E + rE + (R B + rBB ' )(
. 1 − α F0 )
rBB ' + R B + R E
con:
τ = τ αF .
rBB' + R B + R E
R E + rE + (R B + rBB ' )(
. 1 − α F0 )
All'istante t = 0 si ha:
i C (0) = 0
i E (0) = i B (0 ) =
E s1M
rBB' + R B + R E
mentre per t → ∞ le correnti raggiungono il loro valore di regime, che dipende solamente dalle
tensioni applicate.
I EM =
E s1M
R E + rE + (R B + rBB' )(
. 1 − α F0 )
I CM = α F0 . I EM
I BM = (1 − α F0 ).I EM
Dalle relazioni generali appena ottenute si puo' passare a quelle relative ad una particolare
connessione circuitale ponendo a zero la relativa resistenza.
Per la connessione ad emettitore comune, cioe' per RE = 0, in corrispondenza ad un gradino di
tensione applicato all'ingresso l'andamento della corrente di collettore e':
i c (t ) =
t
t
−
−
α F0 .E s1M
β o .E s1M
.1 − e τ =
.1 − e τ
rE + (R B + rBB' )(
. 1 − α F0 )
R B + rBB' + rE .(1 + β o )
con:
49
(2.2.4)
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
τ = τ αF .
R B + rBB'
R B + rBB'
= τ αF .(β o + 1).
rE .(βo + 1) + R B + rBB'
rE + (R B + rbb ' )(
. 1 − α F0 )
(2.2.5)
Per la connessione a base comune, quando RB = 0, si ottiene:
i c (t ) =
t
−
α F0 .E s1M
.1 − e τ
rE + R E + rBB ' .(1 − α F0 )
con:
τ = τ αF .
R E + rBB '
rE + R E + rbb ' .(1 − α F0 )
Infine per la connessione a collettore comune la corrente di emettitore e' data dalla relazione
generale (2.2.3)
Per ottenere un'approssimazione migliore del diodo di emettitore si dovrebbe tener conto
anche di un generatore di tensione VE0 e sostituire in tutte le relazioni a Es1M la quantita' (Es1M VE0).
Nel caso della commutazione verso l'interdizione, quando la tensione di ingresso varia tra
Es1M e zero, si ottengono le medesime relazioni espresse dalle (2.2.3), ma le condizioni iniziali
corrispondono alle tensioni e alle correnti della zona attiva appena prima della commutazione.
La corrente di collettore di regime in queste condizioni vale:
I CM =
β o .E s1M
R B + rBB' + rE .(1 + β o )
e quindi l'andamento della corrente di collettore dopo la commutazione e':
i c (t ) = I CM .e
−
t
τ
dove τ e' ancora data dalla (2.2.5).
Per una migliore approssimazione della caratteristica di ingresso si ottiene, considerando
anche il generatore VE0:
t
−
τ
β o . E s1M .e − VE 0
(2.2.6)
i C (t ) =
R B + rBB ' + rE .(1 + β o )
Infine se la tensione di ingresso, anziche' passare a zero inverte la sua polarita' e passa al
valore -Es2M, la corrente di collettore varia piu' rapidamente e si ottiene:
− (E s 2 M + VE 0 ) + (E s1M + E s 2 M ).e
i c (t ) = β o .
R B + rBB ' + rE .(1 + β o )
−
t
τ
Per ricavare le corrispondenti relazioni per le altre connessioni, quella a base comune e quella
a collettore comune, il procedimento e' perfettamente analogo.
50
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Limitandosi d'ora in avanti a considerare unicamente la connessione a emettitore comune e
definendo il tempo di salita come il tempo necessario affinche' la corrente di collettore passi dal
10% al 90% del suo valore finale, si ha:
t r = τ αF .(β o + 1).
R B + rBB '
. ln 9 = 2,2.τ
R B + rBB ' + rE .(β o + 1)
Il tempo di discesa viene determinato a partire dalla (2.2.6), quando la tensione di ingresso
varia tra Es1M e zero. In tal caso, prendendo in considerazione il tempo necessario affinche' la
tensione di ingresso passi dal suo valore di regime immediatamente prima della commutazione a
zero, si ottiene:
E
t f = τ.ln s1M
VE 0
Quando invece la tensione di ingresso varia tra Es1M e -Es2M, ponendo nella relativa
espressione iC(tf) = 0, si ottiene:
E
+ E s2 M
E
+ E s2 M
t f = τ.ln s1M
≅ τ.ln s1M
E s2 M + VE 0
E s2 M
Se, per una miglior approssimazione si considera come tempo di discesa quello necessario
affinche' la corrente di collettore scenda al 10% del suo valore di regime, si ha:
t f = τ.ln
E s1M + E s2 M
0, 1. E s1M + E s2 M
E' chiaro che quando aumenta Es2M aumenta il termine logaritmico e quindi il tempo di
discesa diminuisce. Definendo come fattore di sovrapilotaggio la quantita'
sf =
E s2 M
E s1M
si ha in definitiva:
t f = τ.ln
sf + 1
sf + 0, 1
a2) Pilotaggio ad alta impedenza.
Quando un transistore viene pilotato in corrente le relazioni fondamentali diventano
relativamente semplici. Nella connessione ad emettitore comune il transistore si puo' ritenere
pilotato in corrente quando
R B + rBB ' >> rE .(β o + 1)
In tal caso l'equazione (2.2.4) diviene
51
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
t
−
E s1M
τβ
i C (t ) = βo .
. 1− e
RB
dove τβ = τ αF .(β o + 1) .
In queste condizioni la variazione a gradino della tensione di ingresso determina una
corrispondente variazione a gradino della corrente di base di valore pari a:
I B1M =
E s1M
RB
e la corrente di collettore varia secondo la
t
−
τ
i C (t ) = β o .I B1M .1 − e β
(2.2.7 )
Per la connessione a base comune si ottiene corrispondentemente
t
−
ταF
i C (t ) = α F .I E1M . 1 − e
mentre per quella a collettore comune
t
−
τβ
i E (t ) = (βo + 1).I B1M . 1 − e
Per quanto riguarda la commutazione inversa, se la corrente di ingresso varia tra IB1M e zero,
ci si puo' rifare alla seguente espressione:
i C (t ) = βo .I B1M .e
−
t
τβ
mentre se la corrente passa da IB1M a IB2M si ottiene
i C (t ) = I CM .e
−
t
τβ
t
−
τβ
+ βo .I B 2 M . 1 − e
Per la connessione a base comune, con un gradino di corrente di emettitore compreso tra IE1M
e IE2M, e per la connessione a collettore comune, si ottengono le due seguenti espressioni:
t
−
τ
α
i C (t ) = I CM .e
+ α F .I E 2 M .1 − e F
t
t
−
−
τ
i E (t ) = I EM .e β + (β 0 + 1).I B 2 M .1 − e τβ
−
t
ταF
52
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Limitandosi al caso della connessione ad emettitore comune, il tempo di salita tr e' dato da:
t r = 2 , 2.τβ
mentre il tempo di discesa, calcolato in corrispondenza ad una corrente di collettore pari al 10% del
suo valor massimo, e':
t f = τβ .ln
I CM − β o . I B2 M
I −I
= τ β .ln BS B2 M
0, 1. I CM − β o . I B2 M
0,1. I BS − I B2 M
Introducendo il fattore di sovrapilotaggio
I
β .I
s f = − o B2 M = − B2 M
I CM
I BS
l'espressione del tempo di discesa puo' essere messa nella forma
t f = τβ .ln
sf + 1
sf + 0, 1
Anche in questo caso quindi il tempo di discesa diminuisce all'aumentare di |IB2M|, cioe'
all'aumentare del sovrapilotaggio.
b) Commutazione in regione di saturazione.
b1) Pilotaggio ad alta impedenza.
Prendendo in considerazione un transistore nella connessione ad emettitore comune, quando
esso viene commutato in conduzione da un gradino di corrente IB1M eccedente il valore IBS
necessario a portarlo al limite di saturazione, si entra nella zona di saturazione. Tuttavia l'andamento
della corrente di collettore e' ancora dato dalla (2.2.7).
Se la resistenza di carico di collettore fosse nulla (RL = 0) la corrente di collettore
raggiungerebbe il valore
I 'CM = β o . I B1M
Quando invece la resistenza di carico e' finita la tensione collettore emettitore VCE
diminuisce man mano che la corrente di collettore aumenta e il punto di lavoro si muove verso il
limite di saturazione dove VCE = VBE e VCB = 0. Con un ulteriore aumento della corrente di base il
punto di lavoro entra nella regione di saturazione mentre cessa l'aumento della corrente di collettore
, che in pratica viene limitata al valore
E − VCES E C
I CS = C
≅
RL
RL
con EC tensione di alimentazione e VCES tensione collettore emettitore in saturazione.
Definendo il tempo di salita come il tempo necessario affinche' la corrente di collettore passi
da 0,1 ICS a 0,9 ICS si ottiene:
53
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
β .I
− 0, 1. I CS
t r = τβ .ln o B1M
β o . I B1M − 0, 9. I CS
e introducendo il fattore di sovrapilotaggio
β .I
I
sr = 0 B1M = B1M
I CS
I BS
t r = τβ . ln
dove
I
I BS = CS
βo
s r − 0,1
s r − 0,9
(2.2.8)
A titolo di esempio si consideri un transistore con ωαF = 30.106 e βo = 50. La corrente al
limite di saturazione sia 5 mA, cioe'
I CS = 5mA
I BS = 0,1mA
Con un fattore di sovrapilotaggio sr =1 si ottiene
t r ≅ 2 , 2. τβ = 2 , 2.
βo
= 3, 7 µ sec
ω αF
E' evidente che il tempo di salita diminuisce all'aumentare di ωαF e al diminuire di βo .Inoltre
dalla (2.2.8) si deduce che il tempo di salita diminuisce al crescere del fattore di sovrapilotaggio. Se
nell'esempio precedente il fattore di sovrapilotaggio fosse 2, nell'ipotesi che βo rimanesse costante,
il tempo di salita passerebbe a 0,9 µsec.
Se il fattore di sovrapilotaggio e' superiore a 3, sviluppando in serie il termine logaritmico
della (2.2.8) si puo' affermare che:
t r = τβ . ln
1
τ
s r − 0,1
0,8
β
I
1 I CS
.
= τβ . . 0,9 +
+ .... ≅ β = o . CS =
s r − 0,9
2.s r
s r ωαF β o .I B1M ωαF I B1M
sr
Pertanto a correnti di pilotaggio elevate, quando I B1M ≅ I CS si ha:
tr ≅
1
ω αF
In saturazione, come piu' volte detto, ambedue le giunzioni sono polarizzate direttamente e
nello spazio di base e' accumulata una carica di portatori minoritari superiore a quella necessaria a
mantenere il transistore al limite di saturazione. Quando si ha la commutazione inversa il numero di
portatori di minoranza presenti in base inizia a diminuire, ma la corrente di collettore rimane
praticamente costante finche' la carica in eccesso non si annulla. Riferendosi al circuito equivalente
di figura 2.13 e risolvendo le relative equazioni e' possibile definire il tempo necessario a rimuovere
tale carica, considerando le forme d'onda di figura 2.15.
54
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
iB
I BS
I B1M
t
I B2M
iC
β o I B1M .(1-e -t/ τβ )
β o I B1M - ( β o I B1M - I CS ) .(1-e -t/ τs )
I'
CM
t = (2-3).ττ s
β o I B2M - ( β o I B1M - I B2M ).(1-e -t/ τs )
I CM
β o I B2M - ( β o I B2M - I CS ) .(1-e -t/ τβ )
ts
t
tr
tf
β o I B2M
figura 2.15
Con un dato grado di saturazione il tempo di restituzione dipende dalla corrente IB2M e dalla
costante di tempo τs, che vale, secondo Moll
τs =
ωαF + ωαR
ωαF .ωαR .(1 − α F .α R )
Si vede immediatamente che τs dipende sia dai parametri della regione attiva che da quelli
della regione inversa.
Il tempo di restituzione ts e' calcolabile dalla relazione
i C (t ) = β o .I B 2 M − (β o .I B 2 M − β o .I B1M ).e
−
t
τs
considerando che all'istante t = ts iC(t) = ICS.
Si ottiene:
I
+I
s +s
t s = τ s .ln B1M B2 M = τ s .ln r f
I CS
1 + sf
+ I B2 M
βo
dove sr e sf sono i fattori di sovrapilotaggio gia' definiti in precedenza.
La relazione appena trovata si applica tuttavia solamente a impulsi di ingresso relativamente
lunghi di durata ti > 2÷4 τs. Se tale condizione non e' rispettata il tempo di restituzione e' influenzato
dalla lunghezza ti dell'impulso.
Come si vede il tempo di restituzione diminuisce quando aumenta sf e quando diminuisce sr.
Al limite, quando sr =1, condizione che corrisponde al limite di saturazione, il tempo di restituzione
si annulla.
55
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Non appena la carica in eccesso e' rimossa dalla base il transistore inizia ad operare nella
regione attiva e la corrente di collettore inizia a decrescere in maniera esponenziale con costante di
tempo pari a τβ. In accordo con le forme d'onda di figura 2.14 si ha:
i C (t ) = β o .I B 2 M − (β o .I B 2 M − I CS ).e
−
t
τβ
Per iC(t) = 0,1 ICS al tempo t = tf, si ottiene:
t f = τβ . ln
β o .I B 2 M + I CS
s +1
= τβ . ln f
β o .I B 2 M + 0,1.I CS
s f + 0,1
(2.2.9)
Per le configurazioni a collettore comune e a base comune il procedimento per determinare i
tempi di commutazione e' del tutto analogo.
Con riferimento all'esempio fatto in precedenza per il quale
ω αF = 30.106
α F = 0, 98
I CS = 5mA
I B1M = 0, 2 mA
supponendo che:
ω αR = 10.106
α R = 0, 8
dalla relazione di Moll si ottiene τs = 0,6 µsec e con IB1M = IB2M = 0,2 mA si ha che sr = sf = 2 e
quindi
ts = τs.ln 1,33 =0,29 τs = 0,17 µsec
Se invece si avesse IB2M = 0 si ricaverebbe
ts = τs.ln 2 =0,69 τs = 0,4 µsec
Il tempo di discesa ricavato dalla (2.2.9) per sf = 2 sarebbe pari a:
tf = τβ.ln 1,43 = 0,36 τβ =0,36 . βo/ωαF = 0,6 µsec
b1) Pilotaggio a bassa impedenza.
Le relazioni fondamentali si ricavano in modo del tutto analogo a quanto gia' visto. Per la
connessione ad emettitore comune si ottiene:
56
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
t r = τ. ln
t f = τ. ln
β o .E s1M
β o .E s1M
− I CS .[R B + rBB' + rE .(β o + 1)]
β o .E s 2 M + I CS .[R B + rBB' + rE .(β o + 1)]
β o .E s 2 M
con τ data dalla (2.2.5).
Il tempo di restituzione si calcola dalla seguente espressione:
t s = τs . ln
E s1M + E s 2 M
R +r
I CS . B BB ' + rE + E s 2 M
β0
c) Effetto di RL e CTC sui tempi di commutazione.
Le relazioni fondamentali ricavate nei precedenti paragrafi si applicano solamente a circuiti la
cui resistenza di carico RL sia molto bassa. Con valori di RL piu' elevati l'effetto della capacita' di
transizione di collettore non puo' piu' essere trascurato. Un'analisi del circuito equivalente mostra
che e' necessario considerare una costante di tempo τt anziche τ, pari a:
rE
r
τ t = τ.1 + ωαF .R L .C TC .1 +
+ E
R B + rBB' R L
Se
rE << R B + rBB'
ω αF . rE . CTC << 1
e
allora
τ t = τ.(1 + ωαF .R L .C TC )
(2.2.9)
Se ad esempio la resistenza di carico fosse di 3,3 kΩ, la capacita di transizione di collettore di
10 pF e ωαF ≅ 6,5.106, alloraτ t ≅ 1. 2 τ , che da' luogo ad un incremento dei tempi di commutazione
di circa il 20%. L'influenza della resistenza di carico e della capacita' di transizione e' in questo caso
relativamente modesta. Con transistori veloci tuttavia, quando cioe' RL.CTC >> 1/ωαF, i tempi di
commutazione sono determinati principalmente dalle caratteristiche del carico di collettore.
Poiche'
β + 1 βo
τ= o
≅
ω αF
ω αF
57
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
si puo' scrivere che:
1
s − 0,1
t r = β o .
+ R L .C TC . ln r
ωα F
s r − 0,9
1
s +1
+ R L .C TC . ln f
t f = β o .
ωα F
s f + 0,1
In saturazione ovviamente le caratteristiche del carico non hanno alcuna importanza in quanto
nelle operazioni in regione di saturazione corrente di collettore e tensione collettore emettitore
rimangono praticamente costanti.
d) Il tempo di ritardo iniziale.
Come si e' gia' detto in precedenza, il tempo di ritardo iniziale td e' definito come l'intervallo
di tempo che intercorre tra una variazione a gradino della tensione di ingresso e l'istante in cui la
corrente di collettore inizia a crescere.
Pur essendo di solito relativamente piccolo, esso deve venir preso in considerazione in
particolare quando in transistore opera con un pilotaggio di corrente (ad alta impedenza).
Si consideri la connessione a emettitore comune di figura 2.16; con una tensione inversa -E2
applicata all'ingresso il transistore e' interdetto e ambedue le giunzioni risultano polarizzate
inversamente. Quando si trascuri la resistenza inversa della giunzione e' applicabile il circuito
equivalente presente nella stessa figura.
Ec
RB
E1
RL
RB
C TC
rBB'
VBE
- E2
C TE
vc
RL
Ec
E1
- E2
figura 2.16
Immediatamente prima della commutazione la capacita' di transizione della giunzione di
emettitore si trova alla tensione - E2, mentre quella della giunzione di collettore alla tensione e' Ec +
E2. Supponendo ora che la tensione di ingresso vari a gradino all'istante to da - E2 a E1 e
trascurando in un primo tempo l'effetto di CTC, si puo' affermare che a partire dall'istante to la
tensione ai capi di CTE inizia a variare verso lo zero. Quando la tensione ai capi di CTE inverte il
suo segno la corrente di collettore inizia a salire. Si ha pertanto che:
v c (t ) = E1 − (E1 + E 2 ).e
58
−
t
τ
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
dove
τ = (R B + rBB ' ).C TE ≅ R B .C TE
L'approssimazione introdotta e' tanto piu' valida quanto piu' il pilotaggio si avvicina ad un
pilotaggio di corrente.
Si ricava immediatamente che:
E
t d = R B .C TE . ln1 + 2
E1
In effetti nello stesso periodo la tensione ai capi della capacita di transizione della giunzione
di collettore CTC diminuisce e all'istante td e' scesa di E2. Il suo effetto e' tale che il tempo di ritardo
reale e':
E
t d = [R B .(C TE + C TC ) + R L .C TC ]. ln1 + 2
E1
Per una buona approssimazione la relazione appena trovata si applica solo se il tempo di
ritardo td e' maggiore del tempo medio di transito dei portatori minoritari attraverso la base, tempo
che e' inversamente proporzionale alla frequenza angolare di taglio ωαF.
Con elevati sovrapilotaggi il tempo di ritardo td rappresenta la parte piu' considerevole del
tempo di commutazione in conduzione td + tr.
2.2.5) Il modello a controllo di carica.
Sparkes e Beaufois hanno introdotto un modello che permette di affrontare in maniera
semplice la determinazione del comportamento di un transistore a giunzione ad ampi segnali. In
esso anziche' far dipendere la corrente di collettore dal pilotaggio della corrente di base o di
emettitore, come nel modello di Ebers - Moll, il transistore viene considerato come un dispositivo
controllato da una carica.
E' bene tuttavia precisare che tale modello e' semplice da utilizzare solo quando il transistore
viene pilotato in corrente, mentre quando il pilotaggio e' un pilotaggio di tensione, esso non presenta
in pratica alcun vantaggio rispetto al modello di Ebers-Moll.
La grandezza di controllo che il modello prende in considerazione e' la carica presente in base
dovuta ai portatori minoritari, anziche' la corrente di base o quella di emettitore e il grosso
vantaggio e' che i suoi parametri sono semplici da definire e da misurare.
Con riferimento alla figura 2.17, supponendo che il transistore sia di tipo npn, si possono fare
le seguenti considerazioni.
Quando si e' nello stato di interdizione (caso a) nella regione di base di tipo p i portatori
maggioritari (lacune) sono in equilibrio con gli accettori fissati al reticolo cristallino. Ad ambedue le
giunzioni si ha un piccolo flusso di portatori minoritari che da' luogo alle correnti inverse, ma la cui
influenza puo' essere completamente trascurata. La relativa distribuzione di carica e' rappresentata
nella figura dalla zona tratteggiata. La larghezza delle zone di carica spaziale, che determina il
valore delle capacita' di transizione, dipende dalle tensioni inverse applicate.
59
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
n
p
n
(a)
w
QB
Q TE
Q TC
(b)
w' > w
Q BS
Q BX
(c)
figura 2.17
Nella regione attiva (caso b) in cui la giunzione di emettitore viene polarizzata in senso
diretto, iniziano a fluire elettroni da emettitore a base e se la base e' omogenea essi si muovono per
diffusione verso il collettore con un gradiente di densita', che, come si e' gia' visto in precedenza, e'
approssimativamente rettilineo. La concentrazione di elettroni e' massima in corrispondenza alla
giunzione di emettitore, decresce linearmente muovendosi verso il collettore e si annulla alla
distanza w che rappresenta l'effettivo spessore della base. Il flusso di elettroni da emettitore a
collettore e' proporzionale al gradiente della carica totale QB distribuita nella base. L'equilibrio
descritto tuttavia e' di tipo dinamico e si puo' quindi affermare che:
IC =
QB
τC
dove τC rappresenta il tempo di transito delle cariche minoritarie attraverso la base e dipende
pertanto dalla larghezza della base stessa.
Si ricordi tuttavia che in base si ha in ogni modo una certa aliquota di ricombinazione e quindi
per mantenere la carica di base QB e' necessaria una corrente
IB =
QB
τB
dove τB e' il tempo medio di vita dei portatori minoritari nello spazio di base.
Dalle due relazioni precedenti si ricava che:
I
τ
β= C = B
I B τC
60
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Commutando dalla regione di interdizione alla regione attiva cambiano inoltre le condizioni di
polarizzazione della giunzione di emettitore e contemporaneamente diminuisce la polarizzazione
inversa della giunzione di collettore a causa della caduta sulla eventuale resistenza di carico di
collettore. Di conseguenza ambedue le regioni di carica spaziale si riducono di spessore facendo
aumentare la dimensione effettiva della base. Per neutralizzare le cariche fisse del reticolo che
risultano scoperte dalla diminuzione delle zone di carica spaziale sono necessarie due cariche
supplementari QTE e QTC.
Al limite della saturazione la carica di base raggiunge il valore QBS.Incrementando
ulteriormente il numero di elettroni iniettati in base il transistore si addentra nella regione di
saturazione (caso c), mentre la corrente di collettore, limitata dalla resistenza esterna di carico,
aumenta solo lievemente. In prima approssimazione si puo' ritenere che la corrente di collettore
rimanga costante.
Poiche' in saturazione ambedue le giunzioni sono polarizzate direttamente anche alla
giunzione di collettore la concentrazione dei portatori di minoranza diventa superiore a quella di
equilibrio, ma il gradiente della distribuzione di densita' deve rimanere costante poiche' costante e'
la corrente di collettore. La distribuzione assumera' pertanto l'andamento di figura 2.17 (c) in cui si
puo' evidenziare la carica QBX in eccesso rispetto quella al limite di saturazione.
Per mantenere tale carica in presenza del fenomeno della ricombinazione e' necessaria una
corrente di base
Q
I BX = BX
τS
con τS tempo medio di vita dei portatori di minoranza in condizioni di saturazione. La carica totale
presente in base in queste condizioni e' quindi:
Q Btot = Q BS + Q BX + QT
dove QBS e', come detto, la carica presente in base al limite della saturazione, QBX quella in eccesso
rispetto a QBS e QT la carica dovuta alla modulazione di larghezza delle zone di carica spaziale.
Al limite della saturazione
I CS =
Q BS
= β o . I BS
τ CO
con βo e τCO valori definiti in queste condizioni operative.
Le semplici relazioni fin qui esposte sono valide in condizioni di regime e nell'ipotesi che
nello spazio di base il gradiente di concentrazione sia lineare. In condizioni dinamiche esse si
possono ritenere sufficientemente approssimate solo se il tempo di commutazione e' notevolmente
superiore al tempo di transito τC.
In condizioni dinamiche tuttavia e' necessario tener anche conto di come la carica QB vari in
funzione del tempo. In termini generali allora si dovra' far riferimento alla seguente relazione
dv
q
dq
q
dq
dv
i B = B + B + BX + BX + C TE . BE + C TC . BC
τB
τS
dt
dt
dt
dt
La corrente di base e' quindi determinata dalle seguenti sei componenti:
61
(2.2.10)
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
• qB / τ B
Corrente dovuta alla ricombinazione della carica attiva di base con
costante di tempo τB.
• dqB / dt
Corrente determinata dalla velocita' di variazione della carica attiva
di base.
• qBX / τ S
Corrente dovuta alla ricombinazione della carica in eccesso, con
costante di tempo τS.
• dqBX / dt
Corrente determinata dalla velocita' di variazione della carica in
eccesso
• CTE .
• CTC .
dv BE
Corrente necessaria alla carica della capacita' di transizione di
dt
emettitore.
dv BC
Corrente necessaria alla carica della capacita' di transizione di
dt
collettore.
E' ovvio che di queste sei componenti andranno prese di volta in volta in considerazione solo
quelle che interessano la zona operativa prescelta. In generale la forma dell'equazione differenziale
ricavata sara':
q dq
+
τ dt
iB =
Integrando tale equazione su un dato intervallo di tempo si ottiene:
t
t
Q
2
q
i
.
dt
=
.
dt
+
∫0 B ∫0 τ Q∫ dq
1
In sostanza la carica totale fornita al circuito di ingresso nell'intervallo 0-t e' la somma della
carica resa necessaria dalla ricombinazione e della carica necessaria a raggiungere il desiderato
livello di corrente.
La corrente di collettore e' determinata in ogni caso dalla
q
iC = B
τC
62
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
2.2.6) Il calcolo dei tempi di commutazione con il modello a controllo di carica
a) Il tempo di ritardo iniziale.
Quando sia la giunzione di emettitore che quella di collettore sono polarizzate inversamente si
ha un ritardo td tra l'attimo di applicazione del comando e l'istante in cui la corrente di collettore
inizia a salire.
Se si integra l'equazione (2.2.10), prendendo in considerazione i soli termini che
comprendono CTE e CTC, poiche' tutti gli altri termini in regione di interdizione risultano nulli, si
ottiene in corrispondenza ad un pilotaggio a gradino di ampiezza IB1
td
VBE1
VBE1 − VCE 2
0
VBE 2
TC
VBE 2 − VCE 2
∫ I B1.dt =
∫ CTE .dv BE +
∫C
.dv BC
dove VBE2 e' la tensione tra base e emettitore immediatamente prima della commutazione e VBE1 e'
la tensione diretta alla quale la corrente di collettore inizia a salire. Per i transistori al silicio si sa
che questa tensione e' dell'ordine del mezzo volt e quindi puo' esercitare una notevole influenza sul
tempo di ritardo. VCE2 infine e' la tensione inversa applicata alla giunzione di collettore nelle
condizioni di interdizione.
Si ottiene:
I B1. t d = QTE + Q TC = Q D
e quindi il tempo di ritardo e'
td =
QD
I B1
con
Q TE = C TE .∆VBE = CTE .(VBE1 − VBE 2 )
Q TC = CTC .∆VBC = C TC .∆VBE
CTC e CTE sono le capacita' di transizione medie integrali determinabili tramite le relazioni
date al paragrafo 2.2.2. Per quanto riguarda tuttavia la capacita' di transizione di collettore, quando
la variazione della tensione di base e' piccola rispetto alla tensione di alimentazione, si puo' ritenere
che essa coincida con quella misurata in condizioni di interdizione a piccoli segnali.
Fanno eccezione quei circuiti in cui le tensioni di base sono relativamente elevate e quelle di
collettore relativamente basse, come ad esempio negli oscillatori bloccati e nei circuiti monostabili e
astabili.
La relazione trovata fornisce risultati soddisfacenti purche' il tempo di salita del segnale di
comando sia notevolmente minore di td e il pilotaggio possa effettivamente essere considerato un
pilotaggio di corrente.
63
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
b) Il tempo di salita.
Se nell'equazione generale si prendono in considerazione solamente quei termini che
inflenzano il tempo di salita tr, trascurando l'influenza di CTE poiche la variazione della tensione
base emettitore in regione attiva e' molto piccola, si ottiene in corrispondenza ad un gradino di
corrente di ingresso pari a IB1M
I B1M =
q BS dq BS
dv
+
+ C TC . BC
τB
dt
dt
(2.2.11)
L'effetto della capacita' di transizione di collettore puo' essere determinato in maniera
semplice. Si tenga infatti presente che il terzo termine del secondo membro dell'equazione (2.2.11)
rappresenta la corrente che deve essere iniettata in base per caricare tale capacita'. Ora, quando il
transistore viene commutato dall'interdizione al limite di saturazione, la tensione base collettore
varia tra VBC2 e 0 e poiche' VBC2 ≅ VCE 2 ≅ R L . I CS , dove RL e' la resistenza di carico di collettore
e ICS e' la corrente di collettore di saturazione, si ottiene che la carica totale fornita e'
Q TC = CTC . I CS . R L
CTC ovviamente e' la capacita media integrale su tale intervallo di tensione. Tenendo poi
presente che:
Q BS = I CS .τ C0
si ottiene infine
dq TC
dv
R .C
dq
= CTC . BC = L TC . BS
dt
dt
τ C0
dt
Sostituendo nella (2.2.11) si ottiene
R .C dq
τ B .I B1M = q BS + τ B .1 + L TC . BS
τ C 0 dt
R L .C TC
si ha:
Usando la trasformazione di Laplace e ponendo τ BV = τ B .1 +
τ C 0
τB .
I B1M
= q BS (s ) + τ BV .[s.q BS (s ) − q BS (t = 0)]
s
Assumendo pertanto che per t = 0 qBS (0) = 0,1 QBS ne deriva che:
64
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
q BS (s ) =
τ B .I B1M
0,1.Q BS .τ BV
+
s.(1 + s.τ BV )
1 + s.τ BV
che antitrasformata permette di valutare l'evoluzione temporale della qBS.
t
−
τ
BV
q BS (t ) = τ B .I B1M .1 − e
che:
t
−
τ
BV
+ 0,1.Q .e
BS
Definendo allora quale tempo di salita tr l'istante in cui qBS (t) = 0,9 QBS si ricava finalmente
τ .I
− 0, 1. Q BS
t r = τ BV .ln B B1M
τ B . I B1M − 0, 9. Q BS
Ricordando che
I .τ
Q BS = I CS . τ C0 = CS B
βo
R .C τ
τ BV = τ B .1 + L TC = B .(τC 0 + R L .C TC ) = β o .(τC 0 + R L .C TC )
τC 0 τC 0
e sostituendo nella precedente relazione si ottiene:
t r = β o .(τ C 0 + R L .C TC ). ln
I CS
βo
s + 0,1
= β o .(τ C 0 + R L .C TC ). ln r
I CS
s r + 0,9
− 0,9.
βo
I B1M − 0,1.
I B1M
Tra τB, τC0 e la frequenza di transizione fT del transistore sono valide le seguenti relazioni
approssimate;
1
1
τC0 ≅
=
ω T 2 π. f T
τB =
βo
1
1
=
=
ω β 2 π. fβ 2 π. fT
Per ottenere valori piu' precisi le due costanti di tempo dovrebbero essere messe in relazione
con i fenomeni fisici che si hanno nel transistore. Si ricordi comunque che τC0 rappresenta il tempo
di transito in base dei portatori di minoranza e quindi puo' essere diminuita solamente riducendo lo
spessore della base, mentre τB rappresenta il tempo di vita medio degli stessi portatori nella regione
di base e dipende dal materiale scelto e dal trattamento cui e' sottoposto.
65
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
c) Il tempo di restituzione.
Se per un transistore saturato si considerano nell'equazione generale (2.2.10) solamente quei
termini che hanno influenza sul tempo di restituzione ts, si ha in corrispondenza di un gradino di
corrente inversa IB2M = cost.
− I B2 M =
Q BS q BX dq BX
+
+
τB
τS
dt
che in termini di trasformata di Laplace diventa
−
I B 2 M Q BS q BX (s )
=
+
+ s.q BX (s ) − q BX (t = 0 )
s
s.τ B
τS
dove QBS/τB = IBS e' la corrente di base al limite della saturazione e qBX(t=0) = QBX =
IBS).
Si ottiene pertanto
q BX (s ) = −(I B 2 M + I BS ).
τS.(IB1M -
1
1
+ τS .(I B1M − I BS ).
1
1
+s
s. + s
τS
τS
Antitrasformando
q BX (t ) = −τS .(I B 2 M
t
t
−
−
τ
τ
S
+ I BS ).1 − e + τS .(I B1M − I BS ).e S
Poiche' il transistore rimane nella zona di saturazione finche' la carica qBX non si e' annullata,
il tempo di restituzione e':
I
+I
s +s
t s = τS .ln B1M B2 M = τS .ln r f
I B1M + I BS
1 + sf
d) Il tempo di discesa.
In corrispondenza ad un gradino di corrente -IB2M l'equazione da utilizzare e':
q
dq
dv
− I B2 M = BS + BS + CTC . BC
τB
dt
dt
che con le stesse manipolazioni adottate nel calcolo del tempo di salita diventa:
− τ B . I B2 M = q BS + τ BV .
dq BS
dt
Trasformando secondo Laplace e ricordando che qBS(0) = QBS = τB.IBS si ottiene:
66
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
q BS (s ) = −
τ B .I B 2 M
τ .Q
+ BV BS
s.(1 + s.τ BV ) 1 + s.τ BV
Antitrasformando si ricava
t
t
−
−
τBV
τBV
q BS (t ) = − I B 2 M .τ B . 1 − e
+ Q BS .e
Definendo il tempo di discesa come l'istante in cui qBS(t) = 0,1 QBS si ottiene infine:
t f = τ BV .ln
Q BS + I B2 M . τ B
1 + sf
= τ BV .ln
0, 1. Q BS + I B2 M . τ B
0, 1 + sf
2.2.7) Guadagno transitorio di corrente in saturazione.
Nell'ambito del metodo a controllo di carica e' opportuno introdurre il concetto di guadagno
transitorio di corrente βs, atto a determinare le prestazioni dinamiche di un transistore usato in
commutazione al variare del carico di collettore. Si supponga infatti che il transistore sia mantenuto
in conduzione da una corrente di base IB, ma con circuito di collettore aperto. In un determinato
istante venga poi connesso un carico al circuito di collettore e al medesimo istante inizi a fluire una
corrente IC, come illustrato in figura 2.18.
S chiuso
t
VCE
+Ec
βs >
S
I CS
IB
VCES
RL
t
IB
+E B
RB
VCE
βs <
VCE
I CS
IB
V CES
t
IC
βs <
I CS
IB
I CS
t
figura 2.18
Quando l'interruttore S e' aperto la corrente di collettore IC e' pari a zero e il transistore opera
in condizioni analoghe a quelle al limite di saturazione. Si ha cioe':
67
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
τ s . I B = Q BS
Al momento in cui l'interruttore S si chiude la corrente di collettore e' quindi data dalla:
IC =
Q BS
τ
= S .I B = β s .I B
τC 0 τ C0
(2.2.12)
Affinche' sia immediatamente disponibile la corrente di saturazione ICS, in modo che la
tensione collettore emettitore non ecceda VCES, dev'essere soddisfatta la:
I
β s ≥ CS
IB
Poiche' normalmente β s < β o , IB deve essere maggiore di IBS.
determinato transistore, di guadagno βo = 50, per il quale
τ C0 = 0, 03 µ sec
τS = 1 µ sec
I CS = 5 mA
Ad esempio, per un
EC = 5 V
dalla (2.2.12) si ottiene
I
5
I B ≥ CS =
≅ 0, 15 mA
βs
33
A correnti di base minori, ad esempio per IB = 0,1 mA, all'istante di chiusura dell'interruttore
fluisce una corrente IC = βs.IB = 3,3 mA che solo successivamente e con una certa lentezza
raggiunge il valore di regime di 5 mA. Con una resistenza di carico pari a 1 kΩ la tensione VCE sale
pertanto a 1,7 V e solo successivamente passa al valore VCES.
Il tempo che intercorre tra la commutazione e l'istante in cui tensione e corrente di collettore
raggiungono i loro valori di regime e' determinato dal tempo necessario a fornire una carica uguale
alla differenza tra la carica attiva di base, necessaria a sostenere la corrente ICS e la carica
effettivamente presente in base all'atto della commutazione. Per IB costante si ottiene:
t
∫I
B
.dt = I B .t = τ C 0 .I CS − τs .I B
0
I
t = τ C 0 . CS − τ s
IB
Con riferimento all'esempio precedente si ottiene t = 0,6 µsec.
Le forme d'onda di tensione e corrente nei vari casi sono riportate sempre in figura 2.18.
68
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
2.2.8) Effetto delle capacita' esterne sui tempi di commutazione.
I tempi di commutazione sono largamente influenzati dalle capacita' interelettrodiche esterne.
In figura 2.19 e' riportato lo schema di un invertitore nella connessione a emettitore comune in cui
sono messe in evidenza tutte le capacita' che agiscono sulla velocita' di commutazione.
Con la base polarizzata inversamente sono le capacita' CBE e CCB che fanno sentire il loro
effetto sul tempo di ritardo. La carica totale che e' necessario fornire al circuito di ingresso per
portare la base al limite di conduzione e':
Q Td = Q D + ∆VBE .(C BE + C CB )
dove QD e' la carica precedentemente definita come somma di QTE e QTC e ∆VBE e' la variazione
della tensione di base.
+Ec
CCB
RL
RL
RL
RB
C CE
iC (t)
VCE
CCE
Ec
VCE
CCE
Ec
C BE
(a)
(b)
figura 2.29
Il tempo di salita e' invece influenzato da tutte le capacita' esterne. La carica totale richiesta
per commutare il transistore e':
C
Q Tt = Q BS + ∆VBC + E C . CE + C CB + ∆VB'E .C BE
βo
dove ∆VB'E e' la variazione della tensione di base necessaria per portare il transistore dal limite di
interdizione a quello di saturazione.
Il valore effettivo CCE viene ridotto del fattore βo a causa del guadagno di corrente del
transistore.
Per quanto riguarda il tempo di restituzione l'effetto delle capacita' CCE e CCB e' relativamente
piccolo e puo' essere trascurato. In saturazione infatti tensioni e correnti rimangono
approssimativamente costanti.
Per quanto riguarda infine il tempo di discesa e' la capacita' CCE che fa sentire maggiormente
il suo effetto. Se questa capacita' e' relativamente grande essa non viene caricata compitamente
durante il tempo di commutazione del transistore. In questa situazione il tempo necessario a caricare
la CCE viene a dipendere in pratica solo dai parametri esterni del circuito di collettore.
Si e' visto in precedenza che durante la commutazione verso l'interdizione la corrente di
collettore decresce con un andamento esponenziale; se tuttavia la corrente inversa di base e'
69
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
relativamente grande si puo' ritenere che la corrente di collettore decresca, almeno in prima
approssimazione, con legge lineare. Per 0< t <tf si avra' quindi:
t
i C (t ) = I CS .1 −
tf
e nel medesimo periodo di tempo ci si puo' rifare al circuito equivalente di figura 2.20 (a).
Si ha percio':
E C − v CE
dv
t
− C CE . CE = I CS .1 −
RL
dt
tf
Trasformando secondo Laplace e considerando che vCE (0) ≅ 0 si ottiene:
v CE (s ) =
1
.
t f .R L .C CE
1
1
s 2 . s +
R L .C CE
Antitrasformando
t
t R .C
−
R L .CCE
L
CE
v CE (t ) = E C . −
. 1− e
tf
t f
e all'istante t = tf
tf
R .C
−
R L .CCE
L
CE
v CE (t ) = E C .1 −
. 1− e
tf
Per tempi t > tf la corrente iC = 0 e ci si deve riferire al circuito equivalente di figura 2.20 (b).
Si ottiene in tal caso:
tf
−
− R t −.Ct f
v CE (t )
R L .CCE
R L .CCE
.1 − e
= 1−
.e L CE
EC
tf
Da tale relazione si puo' ricavare che, indicando con tf il tempo di discesa in assenza di
capacita' esterne e con tF quello quando tali capacita' sono presenti
tF ≅ tf
t F ≅ 3. t f
R L . CCE << t f
per
t F = 2 , 2. R L . CCE
R L . CCE ≅ t f
R L . CCE >> t f
70
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
2.2.9) Pilotaggio di corrente e pilotaggio di tensione.
Le relazioni per i tempi di commutazione che sono state fin qui ricavate utilizzando il modello
a controllo di carica si applicano, come gia' detto, a pilotaggi in corrente. Sotto certe condizioni
questa ipotesi e' approssimativamente soddisfatta anche quando non si puo' realizzare un gradino di
corrente ideale. Se in un transistore accoppiato resistivamente la tensione applicata raggiunge il suo
valore di regime in un tempo non superiore al tempo di ritardo td, cioe' se raggiunge la condizione di
regime prima dell'inizio della salita della corrente di collettore, allora essa potra' essere considerata
con buona approssimazione un gradino di tensione.
Quando poi il valore di regime della tensione di ingresso e' di almeno dieci volte la variazione
di tensione ∆VBE necessaria per portare il transistore dal limite di interdizione a quello di
saturazione, allora la corrente di base durante il tempo di salita puo' venir considerata costante. Cio'
equivale a dire che, per poter affermare che il transistore e' pilotato in corrente, la tensione di
ingresso deve essere dell'ordine dei 4 ÷ 5 volt o superiore; tale condizione e' di solito rispettata da
tutti i circuiti che usano un accoppiamento a resistenza. Durante il tempo di restituzione la corrente
di base e' senz'altro costante essendo costante la tensione base emettitore. Infine durante il tempo di
discesa valgono le stesse considerazioni fatte per il tempo di salita.
Analogamente non e' possibile pensare di applicare un vero pilotaggio di tensione, non fosse
altro che per l'esistenza della resistenza rBB'. A causa di tale resistenza in condizioni transitorie,
durante le quali la corrente di base varia, varia anche la VB'E.
Con pilotaggi di tensione il calcolo dei tempi di commutazione con il modello a controllo di
carica e' piu' complicato che non con un pilotaggio di corrente a causa del legame non lineare tra
corrente di base e tensione base emettitore. Usando tuttavia un'approssimazione lineare della
caratteristica di ingresso i risultati sono piu' o meno identici a quelli ottenuti con il circuito
equivalente ad ampi segnali.
2.2.10) Casi speciali di commutazione all’interdizione.
L'utilizzo dello stato di saturazione permette di progettare con facilita' circuiti di
commutazione che siano poco critici rispetto alla dispersione dei parametri dei transistori e alla loro
variazione con la temperatura. I circuiti cosi' realizzati nella maggior parte dei casi risultano in tal
modo intercambiabili, tuttavia sono poco sensibili ai segnali di ingresso e soprattutto operano con
velocita' di commutazione inferiori alle massime ottenibili a causa della presenza del tempo di
restituzione.
Inoltre durante la commutazione dallo stato di saturazione a quello di interdizione in certi casi
si possono avere alcuni speciali fenomeni.
Si e' gia' detto piu' volte che nella regione di saturazione vengono iniettati in base portatori
minoritari sia dalla giunzione di emettitore che da quella di collettore. Poiche' nei transistori
asimmetrici l'area della giunzione di collettore e' superiore a quella di emettitore i portatori di
minoranza iniettati dal collettore possono raggiungere non solo la regione attiva di base, posta tra
emettitore e collettore, ma anche la regione passiva della base immediatamente adiacente. E'
evidente che in un transistore planare, stante la sua geometria questo fenomeno e' poco sentito.
Negli altri transistori, in particolare quando si abbia una regione di base di dimensioni notevoli, la
carica in eccesso presente nella regione passiva puo' essere diverse volte piu' grande che non quella
nella regione attiva.
Dopo la commutazione all'interdizione la carica in eccesso diminuisce sia per ricombinazione
dei portatori minoritari, che per le correnti esterne. La ricombinazione si ha dapprima nelle regioni
attive della base e solo successivamente diminuisce la carica in eccesso della regione passiva. Tale
fatto puo' far si' che in certe condizioni la carica in eccesso della regione passiva possa fortemente
influenzare il funzionamento del transistore. Ad esempio una carica puo' permanere nella regione
71
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
passiva anche dopo che le giunzioni di emettitore e di collettore sono state polarizzate inversamente.
A causa della diffusione di questa carica nella regione attiva il transistore puo' nuovamente passare
in conduzione per breve tempo, causando una falsa uscita.
Anche quando si commuta verso l'interdizione con correnti elevate si possono avere
comportamenti anomali. Infatti le relazioni che permettono di calcolare il tempo di restituzione e
quello di discesa sono state ricavate nell'ipotesi che la distribuzione della carica in base sia
rettilinea, come illustrato in figura 2.21 (a).
to
E
B
C
IC
t1
ICS
t2
∆I CS
(a)
to
E
B
C
t o t2 t 3
t1
(c)
t2
t3
t
(b)
figura 2.21
A partire dall'istante to (fig. 2.21 a), in cui il transistore e' saturato, la carica di base inizia a
decrescere e all'istante t1 essa risulta completamente rimossa e la giunzione di collettore si polarizza
inversamente. Negli istanti successivi anche la carica attiva diminuisce e il gradiente della
distribuzione di carica assume una pendenza minore finche' all'istante t2 anche la giunzione di
emettitore si interdice, completando la commutazione.
Nella realta' tuttavia la distribuzione di carica in base si puo' ritenere rettilinea solamente a
correnti inverse IB2M < ICS relativamente piccole. Quando invece IB2M ≥ ICS si ha una corrente
inversa sia in base che in emettitore. La carica in eccesso diminuisce piu' rapidamente e la giunzione
di emettitore puo' polarizzarsi inversamente prima di quella di collettore (figura 2.21 b). La
giunzione di collettore rimane quindi polarizzata direttamente dopo che quella di emettitore si e'
interdetta e il transistore inizia ad operare nella regione inversa. A causa della polarizzazione diretta
di collettore e di quella inversa di base la corrente di collettore aumenta come indicato in figura 2.21
(c).
All'istante t3 anche la giunzione di emettitore si polarizza inversamente; da tale momento la
diminuzione della carica di base e' influenzata in misura molto scarsa dal circuito esterno. Puo'
allora essere necessario un tempo notevolmente lungo affinche' la corrente di collettore vada a zero.
Evidentemente in questo caso le relazioni trovate in precedenza per il tempo di restituzione e
per quello di discesa non sono piu' valide.
Il fenomeno descritto e' maggiormente evidente nei transistori drift in cui la concentrazione
dei portatori di minoranza e' minore nella regione di emettitore che in quella di collettore.
L'ampiezza della corrente inversa IB2M influisce anche sul tempo di discesa tf e in precedenza
si e' visto che su tale tempo ha una notevole influenza anche la capacita' totale collettore emettitore
CCE.
In pratica si possono presentare diversi casi:
72
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
a) Con IB2M < ICS il tempo di discesa tf inizia e termina nella regione attiva. Nell'istante in cui
la carica in eccesso e' stata rimossa dalla base la giunzione di collettore si polarizza
inversamente e il transistore entra nella regione attiva. Poiche' la regione di emettitore e'
invece polarizzata direttamente l'iniezione di cariche minoritarie continua e si ha di
conseguenza un tempo di discesa relativamente lungo.
b) Con IB2M < ICS il tempo di discesa inizia nella regione attiva e termina nella regione di
interdizione. Non appena la giunzione di emettitore si polarizza inversamente, il tempo di
discesa tf viene a dipendere esclusivamente dai parametri del circuito esterno. In queste
condizioni il valore della capacita' CCE assume importanza fondamentale.
c) Il tempo di discesa tf inizia e termina nella regione di interdizione. Per un certo valore di
IB2M ambedue le giunzioni di emettitore e di collettore si polarizzano inversamente allo
stesso istante. In questa situazione il transistore viene portato immediatamente dalla
regione di saturazione a quella di interdizione (turn-off istantaneo).
d) Con IB2M < ICS il tempo di discesa tf inizia nella regione inversa e termina in quella di
interdizione. La giunzione di emettitore si polarizza inversamente per prima.
e) Il tempo di discesa tf inizia e termina nella regione inversa.
2.2.11) I parametri del transistore nel modello a controllo di carica.
Si e' visto nei paragrafi precedenti che le prestazioni di un transistore a giunzione possono
venir valutate con il modello a controllo di carica che viene caratterizzato utilizzando i parametri τc
(τco), tempo di transito delle cariche minoritarie in base, τB, tempo medio di vita delle stesse cariche
in zona attiva, τs , tempo medio di vita delle cariche minoritarie in zona di saturazione, cariche QTE
e QTC accumulate nelle capacita' di transizione e il guadagno transitorio di corrente βs.
Al paragrafo 2.2.6 (b) sono gia' state date delle relazioni approssimate che legano τco e τB alla
frequenza di transizione fT e al guadagno di corrente in continua βo. Le cariche accumulate nelle
capacita' di transizione possono venir valutate utilizzando le capacita' medie integrali mentre il
guadagno transitorio di corrente βs e' stato definito al paragrafo 2.2.7.
τs e' essenziale per determinare le prestazioni del transistore nella regione di saturazione e nel
calcolo del tempo di restituzione. Questa costante di tempo puo' essere determinata o per misura
diretta o indirettamente per via di calcolo a partire dai parametri a piccoli segnali misurati al limite
di saturazione. Al paragrafo 2.2.4 (b) e' gia' stata data una relazione di questo tipo e da essa si
poteva rilevare che la costante τs veniva a dipendere sia dai parametri della regione attiva che da
quelli della regione inversa. Tale relazione puo' venir utilizzata con successo qualsiasi sia il tipo di
transistore con il quale si ha a che fare.
Per transistori omogenei tuttavia puo' venir usata la relazione maggiormente approssimata
τs = 1,22.
ωαF + ωαR .α F
ωαF .ωαR .(1 − α F .α R )
che per i transistori simmetrici in cui ω αF = ω αR e α F = α R ≅ 1 diviene:
τs =
1,22
≅ τ co .β o = τ B
ωαF .(1 − α F )
73
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
coincidente con il tempo medio di vita dei portatori minoritari in regione attiva.
Per i transistori asimmetrici in cui ω αF >> ω αR e α R < α F ≅ 1 si ottiene dalla relazione
assegnata al paragrafo 2.2.4 (b):
τs =
1
≅ τ BR
ωαR .(1 − α R )
e in questo caso τs coincide con il tempo medio di vita dei portatori minoritari nella regione inversa.
Una migliore approssimazione si ha usando la:
τs =
αR
αR
=
ω TR 2 π. fTR
I valori calcolati per mezzo delle precedenti relazioni coincidono entro limiti molto ristretti
con quelli misurati. Fanno eccezione i transistori MESA per i quali si commette un errore
dell'ordine del 20 ÷ 30 %.
2.3) Comportamento dinamico dei dispositivi MOS.
Il comportamento dinamico in commutazione dei dispositivi MOS dipende essenzialmente
dalla velocita' con cui le varie capacita' presenti nel circuito possono venir caricate e scaricate
durante la transizione tra uno stato e l'altro. C'e' da osservare che in un MOS esistono sempre delle
capacita' tra gate, drain e source, drain e substrato, source e substrato e inoltre lo stesso ossido di
campo e le metallizzazioni inducono delle capacita' laterali tra gli elementi del dispositivo.
A cio' si aggiunge che gran parte di queste capacita' sono fortemente influenzate dalla tensione
applicata e quindi un'analisi accurata dei fenomeni e' tutt'altro che semplice e per ottenere risultati
accurati la via piu' percorribile e' quella della simulazione.
In prima approssimazione e' tuttavia possibile riunire tutti gli effetti capacitivi in un unico
condensatore Ctot, come illustrato in figura 2.22 (a) in cui e' riportato lo schema di un invertitore
NMOS.
(a)
(b)
V DD
Q (carico)
2
V
V DD
RL
ID
Q (pilota)
IC
IL
V
IC
i
IL
Vo
Ron
Ctot
ingresso
1
figura 2.22
74
I
D
C tot
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
E' necessario ovviamente tener presente che il MOS non e' un interruttore ideale e includere
nel modello anche la resistenza di conduzione RON (figura 2.22 b), mentre a dispositivo interdetto
non si commettono apprezzabili errori se si suppone che la resistenza del MOS sia infinita.
Partendo dalla condizione di interdizione, in modo tale che all'istante iniziale t = 0 la tensione
di uscita sia:
v o ≅ VDD = V(1)
quando il MOS viene commutato in conduzione il condensatore si scarica tendendo alla tensione
V(0 ) =
R ON
.VDD
R L + R ON
con una costante di tempo pari a
τ HL = C tot .
R ON .R L
R ON + R L
Il ritardo di propagazione e' definito come il tempo che intercorre tra l'istante in cui si applica
il comando e quello in cui l'uscita raggiunge il 50% della distanza tra V(1) e V(0), cioe'
V' =
V(1) + V(0)
2
Nella commutazione inversa la tensione di uscita passera' da V(0) a V(1) con una costante di
tempo pari a
τ LH = R L . C tot
Poiche' RL >> RON anche τ LH >> τ HL .
Disgraziatamente RL e RON non sono costanti, ma variano con la tensione. Per calcolare in
via approssimata il ritardo di propagazione si puo' allora impiegare un metodo che valuta la quantita'
di carica trasferita verso o da Ctot.
Nella transizione da V(1) a V(0) si ha che:
iC = i D − i L
e tale corrente e' variabile nel tempo. Indicando con Im il suo valor medio, nell'intervallo di tempo ∆
t la variazione di carica su Ctot e' |Im|.∆t. D'altra parte la variazione di carica nello stesso intervallo
di tempo e' pari a C tot .∆v o . Pertanto:
I m . ∆t = C tot . ∆v o
Ponendo ∆t = τHL e ∆v o =
V(1) − V(0)
si ottiene:
2
τ HL =
C tot
.[V(1) − V(0)]
2. I m
75
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Im puo' venir calcolata come media tra i valori di Ic alle due tensioni VOH e V', avendo
indicato con VOH l'effettiva tensione di uscita allo stato alto.
In figura 2.23 sono riportate le caratteristiche relative al circuito invertitore. Si ricordi che il
carico e' realizzato con un transistore NMOS a svuotamento. In tal caso VOH = VDS1 = 5,8 V.
Quando la tensione di ingresso passa a V(1) ≅ 6 V la corrente di drain e' iD =320 µA.
ID (µ A)
Vo (volt)
6
300
VOH = 5,8 V
curva di carico
250
6
5
5,5
4
200
5
3
150
4,5
2
100
4
50
1
3,5
VOL = 0,5 V
3V
1
2
3
4
5
6
V
2,5 V
DS
(volt)
0
1
V
IL
2
3
= 2,6 V
4
V
IH
5
6
Vi (volt)
= 3,4 V
figura 2.23
Per il MOS di carico, quando la tensione VDS1 = 5,8 V si ha una tensione drain source pari a
VDS2 = VDD - VDS1 = 0,2 V. Dalle sue caratteristiche di drain (figura 2.24) si ricava che iL = 5 µA.
I D2 ( µA)
300
50
+1
40
+ 0,5
30
caratteristica di carico
0
20
-0,5
10
-1
- 1,5
1
2
3
4
5
V DS (volt)
figura 2.24
Quando la tensione di uscita raggiunge il valore V' si ha:
76
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
VDS1 ≅
5, 8 + 0, 5
= 3, 15V
2
mentre VGS1 e' ancora pari a 6 V. In corrispondenza si ottiene, sempre dalle caratteristiche di figura
2.23
i D = i D1 = 310 µA
e nel contempo per il MOS di carico rimangono determinati i seguenti valori:
VDS2 = 2,85 V
VGS2 = 0
Di conseguenza iL = iD2 = 20 µA e quindi la corrente media Im vale
Im =
(320 − 5) + (310 − 20) = 303
2
µA
In prima approssimazione quindi, quando si consideri una capacita' Ctot pari a 2 pF, il tempo
di ritardo τHL rimane calcolato in:
τ HL =
2.10 −12.(5,8) − 0,5
= 17,5 n sec
2.303.10 −6
Considerazioni analoghe portano a calcolare il tempo di ritardo τLH in circa 265 nsec, che,
come ci si aspettava e' notevolmente maggiore di τHL.
2.4) I diodi a giunzione.
Nei circuiti di commutazione si fa largo uso di diodi semiconduttori e a differenza dei
transistori, che sono realizzati quasi esclusivamente in tecnologia planare, essi si trovano in una
gran varieta' di tipi, sia al germanio che al silicio. Sopravvivono infatti ai nostri giorni addirittura i
diodi a punte di contatto, quelli "gold bonded", i diodi con giunzione a lega o diffusi e sono inoltre
largamente presenti diodi zener o altri tipi speciali.
In figura 2.25 sono riportate in maniera qualitativa le caratteristiche tipiche dei vari diodi a
semiconduttore. Per quanto riguarda le caratteristiche dirette sono chiaramente visibili le principali
differenze tra diodi al germanio e diodi al silicio.
I diodi al germanio iniziano a condurre per tensioni dirette di circa 0,2 V, mentre per la
tensione di soglia dei diodi al silicio si superano i 0,5 volt. Queste differenti caratteristiche possono
venir vantaggiosamente sfruttate nel progetto di circuiti di commutazione.
I diodi al silicio offrono rispetto quelli al germanio il vantaggio di una corrente inversa di
saturazione notevolmente inferiore e possono operare a maggior temperatura, che puo' raggiungere e
superare il doppio della massima temperatura operativa di un diodo al germanio.
I diodi al germanio a punte di contatto possono essere utilmente impiegati in quelle
applicazioni in cui la loro resistenza diretta, relativamente elevata, non da' fastidio. La loro corrente
diretta, ad un volt di caduta, puo' variare tra 1 e 25 mA, mentre quella inversa, per tensioni
comprese tra 15 e 50 volt, si mantiene tra i 15 e i 500 µA secondo il tipo di diodo. E' bene porre in
evidenza che i diodi a punte di contatto soffrono quando vengono sottoposti ad alti picchi di
corrente diretta. La loro capacita' non supera di solito il pF.
77
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
IF
3
1) Diodo "gold-bonded"
2) Diodo a giunzione Si
3) Diodo a giunzione Si
4) Diodo a punta di contatto
2
1
2
4
VF
3
4
1
figura 2.25
I diodi "gold bonded" hanno caratteristiche migliori; la corrente diretta a 1 volt e' compresa tra
i 25 e i 600 mA, quella inversa e' senz'altro inferiore a quella dei diodi a punte di contatto e la
capacita' totale non supera qualche picofarad. Sono normalmente progettati per lavorare a
temperature comprese tra - 50° e + 100° C.
I diodi al germanio di tipo miniature sono adatti a lavorare in circuiti con correnti dirette fino
all'ampere. Quelli subminiatura sono invece usati in circuiti di commutazione veloci, con tempi di
commutazione dell'ordine di qualche nanosecondo.
I diodi al silicio sono invece usati in quei circuiti in cui sono necessarie delle correnti inverse
estremamente basse e in cui la temperatura operativa debba superare i 70° ÷ 80° C. I diodi al silicio
con giunzione a lega sono ancora usati in quelle applicazioni in cui sono richieste anche alle alte
temperature buone caratteristiche con alta tensione e bassa corrente inverse. Si ha un'ampia scelta su
un ampio campo di correnti dirette e le tensioni inverse possono raggiungere e superare qualche
centinaio di volt.
I diodi MESA e planari hanno invece una caratteristica diretta peggiore di quelli a lega,
poiche' l'area di giunzione e' normalmente molto piccola. Essi tuttavia presentano delle
caratteristiche dinamiche nettamente migliori.
Infine anche i diodi Zener possono essere vantaggiosamente impiegati nei circuiti di
commutazione. Per scopi di regolazione sono disponibili diodi Zener la cui tensione puo' andare da
qualche volt a qualche centinaio di volt, con varie potenze dissipabili
2.4.1) I tempi di ripristino.
.
Quando un diodo a giunzione viene commutato da uno stato all'altro si hanno dei transitori
che impongono delle limitazioni alla loro velocita' operativa. Ad esempio, in risposta ad un gradino
di tensione in polarizzazione diretta, la tensione del diodo, inizialmente inversa e normalmente di
valore relativamente elevato, raggiunge il suo stato di regime, corrispondente alla condizione di
conduzione, dopo un intervallo di tempo tfr, chiamato tempo di ripristino diretto. Quando
viceversa si commuta verso l'interdizione si ha inizialmente una notevole corrente inversa, che va
man mano diminuendo e raggiunge il suo valore di regime dopo un tempo trr, detto tempo di
ripristino inverso.
I tempi di risposta e le ampiezze dei segnali in regime transitorio dipendono dal tipo di diodo
e dal circuito in cui esso e' inserito.
78
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
a) Tempo di ripristino diretto.
In figura 2.26 sono riportati in maniera qualitativa alcuni andamenti tipici del transitorio ai
capi di un diodo quando questo viene repentinamente commutato in conduzione. Gli andamenti a
tratto continuo rappresentano la risposta ad un gradino ideale di corrente (rappresentato in a),
mentre quelli a tratteggio sono relativi a casi reali, quando il diodo viene pilotato da un generatore
con tempo di salita finito.
I
F
a
t
VF
b
t
t fr
c
t
tfr
figura 2.26
La caratteristica di figura 2.26 (b) e' relativa a diodi in cui, durante il tempo di commutazione,
la resistenza viene modulata da un valore iniziale alto ad uno piu' basso corrispondente alla
conduzione diretta. Questo fenomeno e' scarsamente rilevante nei diodi a punte di contatto, ma in
quelli "gold bonded" e in quelli a giunzione di piccola area puo' assumere una notevole importanza.
L'ampiezza del transitorio e il tempo di risposta dipendono dalla corrente diretta, dal tempo di
salita dell'impulso di comando e dall'impedenza del circuito esterno. Quando la commutazione
viene eseguita con una piccola corrente diretta, condizione nella quale la modulazione della
resistenza e' trascurabile, l'andamento della tensione in transitorio assume l'aspetto di figura 2.26 (c).
La tensione ai capi del diodo sale di solito con andamento esponenziale, ma su un certo campo di
valori di corrente in certi casi puo' assumere carattere oscillatorio.
Da un punto di vista pratico tuttavia assume molto maggiore importanza il tempo di ripristino
inverso.
b) Tempo di ripristino inverso.
In figura 2.27 sono riportati gli andamenti tipici della commutazione all'interdizione.
All'istante di commutazione l'impedenza presentata dal diodo e' relativamente bassa e molto
prossima a quella presentata in conduzione. Di conseguenza si ha una corrente inversa il cui valore
79
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
dipende principalmente dalla tensione inversa ER applicata dall'esterno e dalla resistenza totale R
del circuito in cui il diodo e' inserito.
VF
t
VR
IF
IF
t
0,1 I R
t sr
IR
t dr
IF
t
I
RO
figura 2.27
Durante un tempo tsr la corrente inversa IR si mantiene quasi costante; in alcuni tipi di diodo
tuttavia il tempo tsr e' talmente breve da poter essere trascurato. Tale periodo ha fine non appena la
carica determinata dai portatori minoritari in prossimita' della giunzione e' stata rimossa.
Successivamente la tensione ai capi del diodo si porta in maniera pressocche' esponenziale al valore
ER mentre la corrente inversa diminuisce fino a raggiungere il valore della corrente inversa di
saturazione. Il tempo di ripristino inverso trr = tsr + trr diminuisce ovviamente all'aumentare di IR e
per un determinato valore di corrente IRO il tempo tsr si annulla. In queste condizioni la
caratteristica transitoria e' quella illustrata in figura 2.27 (c)
In analogia a quanto visto per i transistori a giunzione si puo' affermare che in condizioni di
regime la carica totale accumulata nel diodo e dovuta ai portatori minoritari
Q T = τ. I F
e' direttamente proporzionale al tempo medio di vita τ dei portatori di minoranza e alla corrente
diretta IF. La carica QEX che viene rimossa dal circuito esterno in presenza della corrente inversa IR
e' sempre minore di QT e la parte rimanente si annulla per ricombinazione. La carica restituita
dipende dal rapporto IF/IR e dal rapporto W/L tra lo spessore del materiale di base e la lunghezza di
diffusione. Per diodi normali di solito Q EX < 0, 5. Q T .
Esistono diodi speciali progettati in modo che la carica restituita sia in pratica coincidente con
la carica accumulata in prossimita' della giunzione. In questo caso la carica residua e'
comparativamente piccola con il risultato che la corrente scende dal suo valore iniziale IR al valore
80
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
di regime in alcuni nanosecondi in quanto il tempo tdr risulta trascurabile. Questo viceversa non
avviene nei diodi normali in cui il tempo di decadimento tdr non puo' essere affatto ignorato.
2.4.2) Calcolo dei tempi di ripristino.
Quando un diodo deve venir usato in circuiti di commutazione ad alta velocita' e' essenziale
conoscere il tempo di ripristino inverso trr. Nei dati forniti dai vari costruttori le caratteristiche
transitorie dei diodi vengono presentate in molte maniere diverse e il piu' delle volte in maniera
incompleta. Questi dati, ad esempio, forniscono il tempo durante il qual la carica QEX viene estratta
dal diodo o il tempo necessario affinche' la corrente inversa cali ad un valore prefissato o altri dati
ancora. E' evidente che tali specifiche si applicano solamente a condizioni operative simili a quelle
in cui la misura e' stata effettuata.
A questi dati si puo' tuttavia fare riferimento per calcolare, sia pure in maniera approssimata, il
tempo di ripristino inverso in qualsiasi condizione operativa.
Una soluzione semplice si basa sul modello a controllo di carica, assumendo che la relazione
tra la carica totale accumulata nel diodo immediatamente prima della commutazione sia
τF = τ =
Q
IF
con τF tempo medio di vita dei portatori minoritari in zona di conduzione, mentre la relazione tra
carica accumulata nel diodo alla fine del tempo tsr sia
τR =
Q(t sr )
IR
con τR tempo medio di vita dei portatori minoritari in zona di polarizzazione inversa.
Tenendo conto anche della capacita' Cj della giunzione l'equazione di carica e' allora
i=
dv j
dq q
+ + C j.
dt τ F
dt
(2.4.1)
dove vj e' la tensione inversa applicata alla giunzione.
Si e' visto in precedenza che per un tempo compreso tra l'istante di commutazione e tsr la
corrente i = -IR = costante mentre l'effetto di Cj nello stesso periodo si puo' ritenere trascurabile.
Ponendo allora la condizione iniziale
q(0) = Q = τ F .I F
dalla (2.4.1) si ricava
q(t ) = (I F + I R ).τ F .e
−
t
τF
− τ F .I R
Secondo le ipotesi fatte, all'istante t = tsr e q(tsr) = τR.IR e quindi
81
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
IF
IR
t sr = τ F . ln
τ
1+ R
τF
1+
(2.4.2)
Anche il tempo tdr puo' essere calcolato in modo abbastanza semplice. Infatti la tensione alla
giunzione e' Vj = -ER + R.iR e si ricava quindi che:
dv j
di
= R. R
dt
dt
Poiche' alla fine del periodo tsr si ha
q(tsr) = τR.IR
e per t > tsr si ha
q(t) = τR.iR
si ricava che dq/dt =τR . diR/dt e sostituendo nella (2.4.1) si ottiene finalmente che:
− i R = (τ R + R.C j ).
di R τ R
+ .i R
dt
τF
Definendo allora il tempo tdr come l'istante in cui la corrente inversa diviene pari al 10% di IR,
si ottiene in definitiva
τ R + R.C j
τ R + R.C j
(2.4.3)
t dr =
. ln 10 = 2,3.
τR
τR
1+
1+
τF
τF
Dalle due relazioni (2.4.2) e (2.4.3) si possono trarre le seguenti conclusioni. All'aumentare
della corrente inversa IR, a parita' di corrente diretta IF, il tempo tsr diminuisce e si annulla quando
τ
I R = I RO = F . I F
τR
Per commutazioni sovrapilotate, con IR > IRO, si ottiene un tempo
I
1+ R
IF
t o = R. C j .ln
τ
1+ F
τR
mentre il tempo tdr si calcola ancora dalla (2.4.3).
Riportando il tempo tsr su un grafico in funzione del termine ln (1+ IF/IR) si ottiene una retta
la cui pendenza e' τF (vedi figura 2.28). L'intersezione di tale retta con l'asse delle ascisse alla
coordinata ln (1 + τR/τF).
82
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
200
150
100
t sr
[ nsec ]
50
0
1
2
ln ( 1 +
3
4
IF
)
IR
figura 2.28
Misurando pertanto tsr per vari valori del rapporto IF/IR si possono facilmente determinare le
due costanti di tempo τF e τR.
A titolo di esempio si supponga di aver effettuato per un diodo le seguenti misure (riportate in
figura 2.28):
per
per
IF
= 10
IR
IF
= 40
IR
t sr = 100 n sec
t sr = 200 n sec
In corrispondenza a questi valori si ha:
I
ln1 + F
IR
= ln 11 = 2,4
I
ln1 + F
IR
= ln 41 = 3,71
La linea retta che passa per i due punti P1 (2,4 ; 100) e P2 (3,71 ; 200) interseca l'asse delle
ascisse alla coordinata 1,09. Pertanto
τ
ln1 + R = 1,09
τF
Si ottiene quindi
83
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
τF =
∆t sr
100
=
= 76 n sec
I F 1,31
∆ ln1 +
IR
(
)
τ R = e1, 09 − 1 .τ F = 150 n sec
Determinati i valori delle due costanti di tempo il calcolo dei tempi di ripristino puo' essere
fatto per qualsiasi condizione di lavoro.
Esistono tuttavia anche altre relazioni approssimate che permettono il calcolo del tempo di
ripristino inverso dei diodi a giunzione e che si basano su un piu' attento esame dei fenomeni fisici.
Di esse si riportano nel seguito due di un certo interesse, di cui la prima si applica a diodi spessi,
cioe' a quelli in cui lo spessore W e' notevolmente maggiore del cammino libero di diffusione L, la
seconda ai diodi sottili.
a) Tempo di ripristino inverso di un diodo spesso (W>>L).
Quando sia conosciuto il tempo di ripristino inverso necessario affinche' la corrente inversa
scenda ad uno specifico valore allora il tempo di ripristino tsr per differenti condizioni operative
puo' essere calcolato dalla:
erf
t sr
=
τ
1
I
1+ R
IF
(2.4.4)
Questa espressione2 e' ottenuta dalla soluzione generale dell'equazione di diffusione per un
diodo spesso rispetto alla lunghezza di diffusione L. IF e' la corrente diretta immediatamente prima
della commutazione, IR quella inversa immediatamente dopo e τ e' l'effettivo tempo di vita dei
portatori minoritari.
Il tempo necessario poi affinche' la corrente inversa scenda dal valore IR ad uno specifico
valore iR puo' essere determinato dalla:
−
t
iR
e τ
t
=
+ erf
−1
IF
τ
t
π.
τ
ricavata nell'ipotesi di I R → ∞ e tsr = 0.
Le relazioni (2.4.4) e (2.4.5) sono riportate nel grafico di figura 2.29
2
Si ricordi che la funzione erf (x) e' definita come:
erf (x ) =
2
π
84
x
.∫ e −z .dz
0
2
(2.4.5)
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
IR
IF
iR
IF
10
8
6
5
4
3
tsr
1
=
I
τ
+
1 R
IF
erf
a)
2
t
iR
e− τ
+ erf tτ − 1
=
IF
t
π. τ
b)
1
0,8
0,6
0,5
0,4
0,3
0,2
a)
b)
0,1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,1
1,2
1,3
t sr
t
τ
τ
1,4
figura 2.29
A titolo di esempio si assuma che per far diminuire la corrente inversa di un diodo al valore iR
= 3 mA, essendo le condizioni inizali IF = 10 mA, ER = 6 volt e R = 200 Ω, si abbia un tempo di
ripristino trr pari a 18 nsec. Sulla base di questi dati si puo' determinare τ.
All'istante della commutazione si ha IR = 6 V / 200 Ω = 30 mA, cioe' IR/IF =3. Dalla curva (a)
di figura 2.29 si ricava che tsr = 0,055 τ. Inoltre dalla curva (b) si ricava per iR/IF = 3 mA/10 mA =
0,3 un valore pari a 0,3 τ, mentre per IR/IF = 3 si ha un valore di 0,02 τ. Si ottiene percio' che il
tempo tdr = 0,3 τ - 0,02 τ = 0,28 τ.
Il tempo di ripristino totale e' pertanto:
t rr = 0, 055. τ + 0, 28. τ = 0, 335. τ = 18 n sec
Si ricava immediatamente che τ = 54 nsec e con questo valore si puo' determinare il tempo di
ripristino trr in diverse condizioni operative. Se si volesse ad esempio conoscere il tempo di
ripristino per una corrente inversa iR = 1 mA, quando R = 300 Ω, IF = 5 mA e ER = 3 V, e'
sufficiente osservare che in tal caso IR = 10 mA e quindi IR/IF = 2. In corrispondenza a tale valore
dalla curva (a) si ricava che tsr = 0,095.τ = 5,1 nsec. Per il rapporto iR/IF = 0,2 e IR/IF = 2 dalla
curva (b) si ricavano poi i valori 0,425 τ e 0,035 τ. Si ottiene allora che tdr = 0,39.τ = 21 nsec. Il
tempo di ripristino totale e' allora trr = (5,1 + 21) nsec = 26,1 nsec.
85
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
a) Tempo di ripristino inverso di un diodo sottile (W<<L).
In un diodo sottile il tempo di ripristino inverso puo' venir considerato completamente
indipendente dal tempo medio di vita dei portatori minoritari in quanto la ricombinazione e'
trascurabile. Esso viene a dipendere unicamente dal tempo medio di transito τt e le relazioni usabili
sono in tal caso:
t rr = t sr + t dr = τ t .
8
4
I
. ln 2 .1 + F + 0,233.τ t
2
π
π I R
per IR ≤ IF, mentre per IR > IF valgono le
4
1
t sr = τ t . .
π
I
1 + F
IR
τt
1
t dr = .
π
1 + 0,1. I R
IF
t rr ≅
0,467.τ t
IR
1 +
IF
2
+
2
2
1
−
2
IR
1 +
I F
0,318.τ t
I
1 + 0,1 R
IF
2
Le relazioni fornite per il calcolo diretto di trr si applicano per variazioni della corrente inversa
tra il 100 % e il 10 % del suo valore iniziale.
2.5) I diodi Schottky.
Nei circuiti di commutazione assume notevole importanza un particolare tipo di diodo
realizzato tramite una giunzione tra metallo e semiconduttore estrinseco. Una tale giunzione in
funzione del drogaggio del semiconduttore puo' presentare caratteristiche rettificanti, come avere un
comportamento puramente ohmico. A causa della diversa concentrazione dei portatori nei due
materiali si forma infatti una barriera di potenziale alla giunzione; per realizzare contatti ohmici si
fa in modo da eliminare l'effetto di tale barriera, come nel caso di giunzioni tra alluminio e silicio
fortemente drogato, mentre se si usa silicio debolmente drogato o arseniuro di gallio si ottiene una
giunzione rettificante chiamata diodo a barriera Schottky o piu' semplicemente diodo Schottky.
I diodi Schottky hanno una caratteristica voltamperometrica simile a quella di un diodo a
giunzione, ma la tensione di soglia e' piu' bassa aggirandosi su 0,3 volt, e la corrente inversa e' piu'
alta. Ambedue queste caratteristiche derivano dall'elevata concentrazione di elettroni nel metallo
che fa si' che con un numero di portatori piu' elevato a disposizione sia possibile ottenere gli stessi
valori di corrente con una minor tensione applicata.
86
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
Il diodo Schottky trova applicazione nei circuiti di commutazione ad elevata velocita' in
quanto il suo funzionamento si basa sui portatori maggioritari (in un metallo infatti non vi sono
portatori minoritari).Pertanto il tempo di ripristino tsr e' in pratica nullo e il tempo totale di ripristino
coincide con tdr, normalmente di valore molto ridotto. Si ottengono in tal modo diodi estremamente
veloci il cui tempo di ripristino puo' essere notevolmente inferiore al nanosecondo.
2.6) La dissipazione di potenza in regime di commutazione periodica.
Si consideri un invertitore realizzato con la connessione a emettitore comune e il cui carico sia
puramente resistivo. In figura 2.30 sono riportati in maniera approssimata gli andamenti della
corrente di collettore iC, della tensione collettore emettitore vCE e della potenza dissipata PC in
presenza di una commutazione periodica.
iC
t ON
t OFF
I CO
t
tr
tf
vCE
VCEM
VCES
t
P
P
CM
OFF
ON
dissipazione
media
t
figura 2.30
Quando ci si trova nello stato di interdizione nel circuito circola a regime una piccola corrente
Ico che, come si sa, dipende dalle condizioni operative del circuito di ingresso, dalla temperatura e
dalle tensione VCE. Se in base e' applicata una polarizzazione inversa sufficientemente elevata la
corrente Ico coincide con la ICBO. Pertanto se la resistenza di carico di collettore RL non e'
eccessivamente grande anche la tensione collettore emettitore VCEM coincide in pratica con la
tensione di alimentazione EC. La potenza dissipata e' comunque abbastanza piccola in quanto
piccola e' la corrente di collettore.
Nello stato di conduzione a regime, se il transistore lavora in regione di saturazione, la
tensione collettore emettitore scende al valore VCES che nella peggiore delle ipotesi e' di qualche
87
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
decimo di volt. La corrente di collettore viceversa sale al valore ICM che, se EC e abbastanza piu'
grande di VCES vale in via approssimata
I CM ≅
EC
RL
Anche in questo caso pertanto la dissipazione di potenza e' modesta poiche' e' piccola la
tensione collettore emettitore.
Durante i transitori di commutazione invece il punto di lavoro attraversa regioni in cui sono
relativamente elevate sia la corrente che la tensione di collettore. La potenza di picco puo' allora
assumere valori relativamente elevati e con alte frequenze di commutazione la potenza dissipata in
transitorio puo' divenire la parte preponderante della potenza dissipata totale. Riferendosi al
transitorio relativo al tempo di salita tr e supponendo per semplicita' che corrente iC e tensione vCE
varino in tale intervallo linearmente, si ottiene , trascurando la ICBO, che:
i c (t ) = I CM .
t
tr
v CE (t ) = VCEM − (VCEM − VCES ).
t
tr
La potenza media nel periodo T del segnale di comando e dovuta al transitorio di salita sara'
quindi:
t
Ptr =
=
1 r
t
t
.∫ VCEM − (VCEM − VCES ). .I CM . .dt =
T 0
tr
tr
VCEM .I CM .t r VCES .I CM .t r
t
+
= r .I CM .(VCEM + 2.VCES )
6.T
3.T
6.T
Ragionando analogamente per il transitorio di discesa si ottiene:
t
Ptf =
1 f
t
t
t
.∫ VCES − (VCES − VCEM ). .I CM . .dt = f .I CM .(VCEM + 2.VCES )
T 0
tf
tf
6.T
Vi sono poi i due contributi dovuti alla potenza dissipata negli stati di regime.
Rispettivamente si ha:
t
PON
1 ON
V .I .t
= . ∫ VCES .I CM .dt = CES CM ON
T 0
T
POFF
1 OFF
V .I .t
= . ∫ VCEM .ICO .dt = CEM CO OFF
T 0
T
t
Infine e' necessario prendere in considerazione la potenza che si dissipa in base nello stato
ON. Quella dello stato OFF e' comunque assolutamente trascurabile.
PB =
VBEM . I BM . t ON
T
88
Capitolo II
I dispositivi elettronici. Condizioni operative dinamiche.
C'e' tuttavia da osservare che in questo caso sia VBEM che IBM sono di piccolo valore e il piu'
delle volte la potenza dissipata in base puo' essere ignorata.
Pertanto la potenza media che si dissipa in regime di commutazione periodica e' in prima
approssimazione
P=
I CM .(VCEM + 2.VCES )(
. t r + t f ) VCES .I CM .t ON + VCEM .I CO .t OFF
+
T
T
Il primo termine dell'espressione rappresenta la potenza dissipata durante il transitorio ed
aumenta all'aumentare di tr, tf e della frequenza di ripetizione f = 1/T.
Se tr = tf e ton = toff = T/2 si ottiene:
P=
I CM .[2.t r .(VCEM − VCES ) + 3.VCES .T ] + 3.I CO .[T − 2.t r ]
6T
Nell'ipotesi che la dissipazione dovuta a ICO possa essere trascurata e che VCES << (VCEM
≅ EC) la precedente espressione si riduce a:
I .E .t
V
.I
P = CM C r + CES CM
3. T
2
Infine, poiche' I CM ≅
EC
si ricava che:
RL
t
V
E C2 t r VCES
= PRL . r + CES
+
P≅
.
R L 3T 2.E C
3T 2.E C
PRL rappresenta la potenza commutata nel carico RL; poiche' il termine compreso nella
parentesi e' piccolo quando tr << T e VCES << EC appare evidente che la potenza commutata PRL
puo' essere diverse volte maggiore di quella dissipata P. E' comunque sempre opportuno che P sia
minore della massima potenza dissipabile nel transistore alla temperatura di lavoro.
Con un carico capacitivo o induttivo le condizioni operative sono meno favorevoli e la
potenza dissipata in transitorio puo' essere notevolmente maggiore di quella che si ha con un carico
puramente resistivo. Con un carico parzialmente reattivo il punto di lavoro si muove in regioni, in
cui si hanno contemporaneamente alte tensioni e correnti. Inoltre nel caso di carico reattivo, i tempi
del transitorio non dipendono unicamente dalle caratteristiche del transistore, ma anche da quelle
del carico e possono essere relativamente grandi.
89