DINAMICA
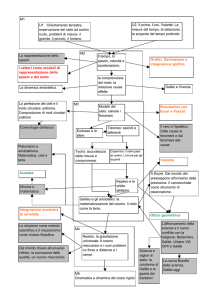
1. INTRODUZIONE: PRIMI CONCETTI DI INERZIA E DI FORZA
Le due nozioni di inerzia e di forza nascono insieme, come agenti che si
oppongono al moto o che lo producono, tanto che non è mai stato possibile chiarire il
significato dell’una senza l’altra, e questa situazione è durata fino ai giorni nostri,
benché una chiarezza completa non sia stata ancora raggiunta.
In origine le vaghe nozioni di forza, lavoro, potenza nascono dalla nostra
consapevolezza dello sforzo che dobbiamo compiere nel muovere corpi materiali, ed
è per questo che esistono degli usi molto antichi di questi termini.
Ogni nozione precisa di forza dipende da una corrispondente nozione di causa.
ARISTOTELE
“4 CAUSE”
rappresentano altrettanti tipi di spiegazione,
anche se solo la CAUSA EFFICIENTE è la più vicina alla moderna nozione
scientifica di causa
CAUSA FINALE (o scopo)
CAUSA FORMALE (natura di un oggetto)
CAUSA MATERIALE (ciò di cui è fatto un oggetto)
Nella scienza sono ampiamente trascurate, anche se, talvolta, è utilizzata la nozione
di causa materiale.
ARISTOTELE distingue due tipi di MOTO
→ NATURALE
→ VIOLENTO
v= A
B
A: forza motrice
B: resistenza
IMPOSSIBILITA’ del VUOTO (in esso non vi sarebbe resistenza)
In Aristotele la nozione di inerzia è completamente assente; ma c’è una nozione
quantitativa di forza, sebbene egli ritenga che questa dia luogo a una velocità invece
che ad un’accelerazione.
Tale meccanica è basata su una serie di osservazioni accurate del mondo circostante e
riesce a spiegare anche altre cose, sebbene con qualche difficoltà.
2. IL MEDIOEVO
Le prime critiche ad Aristotele sono di tipo logico e sono avanzate fra la fine del
5° secolo e l’inizio del 6° secolo dal neoplatonico Giovanni Filopono. Filopono
respinse la formula aristotelica v = A/B a favore di v = A – B. E’ interessante
notare che ponendo B = 0, questa formula rendeva possibile concepire un moto
nel vuoto. Non v’è dubbio che lo stesso Galileo Galilei fu influenzato dalle idee di
Filopono.
Nel 13° secolo, Ruggero Bacone (1214-94) rifiutò le idee aristoteliche per l’effetto
negativo che esse producevano sulla mentalità scolastica dell’epoca. Rifletté a
lungo sul problema della forza, specialmente sulla nozione di azione a distanza.
Un più solido progresso si compì con Roberto Grossatesta (~1175-1253) con la
fondazione del Merton College di Oxford. Dote peculiare di questo filosofo era
quella di riunire in sé le due tradizioni scientifiche presenti nel 12° secolo: quella
empirica e quella logica. Egli, infatti, fu il primo a scrivere sui problemi della
induzione e della verifica sperimentale.
Thomas Bradwardine (~1290-1349) elaborò una terza versione del moto, che in
forma moderna si può scrivere così
v = log A
B
(per ovviare all’inconveniente che se A=B, si aveva velocità uguale a 1 e non a 0).
Il contributo principale della scuola del Merton College al problema del moto
venne da W. Heytesbury, a metà del 14° secolo. Espressa in forma moderna, egli
fornì la seguente regola: se, in un moto, la velocità cresce uniformemente nel
tempo, il corpo percorre in un tempo dato lo spazio che esso percorrerebbe
muovendosi a velocità uniforme in metà tempo. In questo caso, l’elemento di
novità più importante ed essenziale era l’introduzione dell’idea di
ACCELERAZIONE, sconosciuta all’altra celebre scuola scientifico-filosofica
dell’epoca, cioè quella di Parigi.
In essa, infatti, all’inizio del 14° secolo, Giovanni Buridano (~12901358~)respinge la spiegazione aristotelica del volo della freccia in favore di quella
di Filopono, secondo la quale la corda dell’arco impartisce una qualche forza
motrice incorporea alla freccia e non all’aria. Questa di Buridano è stata definita la
TEORIA dell’IMPETO. L’impeto è pressappoco identico a quello che
successivamente verrà definito come QUANTITA’ di MOTO, o MOMENTO, che
rappresenta una nozione molto più precisa sia di quella d’inerzia, sia di quella di
forza. La teoria dell’impeto rappresentò la prima maniera di stabilire un legame tra
moti terrestri e moti celesti. I corpi ascendenti perdevano impeto a causa della
resistenza dell’aria, mentre le sfere celesti acquistavano l’impeto da Dio stesso.
3. OSSERVAZIONE ED ESPERIMENTO
Si ritiene comunemente che, nel loro significato moderno,
l’osservazione e l’esperimento siano apparsi storicamente con l’opera
di Johannes Kepler (1571-1630) e Galileo Galilei (1564-1642). A
Kepler dobbiamo i veri inizi del concetto di forza; in Galilei, d’altro
canto la forza è posta ai margini, l’inerzia viene invece collocata in
primo piano.
Kepler aveva molto chiara la necessità di un concetto di forza, e
un’idea quasi altrettanto chiara per quanto riguarda l’inerzia, ma non
era in grado di dare a queste due una articolazione matematica
definita, poiché egli non possedeva alcuna nozione di ciò che poi
verrà espresso compiutamente nella prima legge del moto di Newton,
che consentirà il calcolo della forza. Questa legge sarebbe venuta alla
luce con Galilei; Kepler era troppo impegnato nello studio
dell’astronomia e nell’analisi dei moti quasi circolari dei pianeti,
perché potesse concepire la nozione del moto rettilineo uniforme.
Galilei effettuò indubbiamente degli esperimenti, ma bisogna notare
che il suo atteggiamento, a questo proposito, non era esattamente
quello moderno. Nel 1590 egli proclamava nel De Motu che il suo
obiettivo era quello di fondare il ragionamento su poche osservazioni
ben scelte, così come la geometria è basata su pochi assiomi. La
chiave è l’esperimento mentale. Questa nozione non è di Galilei, ma
egli fu il primo a utilizzarla in maniera così efficace e così spesso.
Con Galilei, per la prima volta, vengono distinti due usi del termine
inerzia (sebbene egli non usi affatto tale parola), ovvero, la tendenza
dei corpi a rimanere in stato di quiete, o di moto uniforme, e la
misura numerica di tale tendenza fornita dalla massa.
4. Galilei prende le mosse dalla distinzione aristotelica fra moti naturali e
moti violenti. Per quanto riguarda i secondi, in particolare nella
percussione, egli ha una idea chiara della massa come fattore
quantitativo (numerico) che impedisce il moto. Ma cerca anche di
ampliare la divisione aristotelica ammettendo moti, da lui definiti misti,
che sono in parte violenti e in parte naturali. E’ il caso, per es., di una
pietra che viene lanciata verso l’alto e che poi cade naturalmente.
Questo progresso è possibile poiché, per la prima volta, egli ha una
chiara consapevolezza della particolare struttura dei problemi
meccanici, cioè che vi sono leggi generali del moto che vengono
applicate a problemi particolari attraverso l’imposizione di condizioni
iniziali. Con la nozione di moto misto, in cui la forza muscolare inizia il
movimento della pietra, che in seguito è soggetta a un moto naturale,
egli offre un’opzione possibile nel modo di procedere, e precisamente
quella di ricomprendere i moti naturali di Aristotele nella categoria dei
moti violenti mediante l’introduzione dell’idea di una forza
gravitazionale. Egli tratta i moti indotti dalla gravità (essenzialmente i
moti naturali di Aristotele) come moti caratterizzati semplicemente da
una certa accelerazione, cosicché l’effetto gravitazionale poteva venir
considerato dovuto a una accelerazione, e non a una forza; utilizza poi
le forze per la spiegazione dei moti violenti. Il primo di questi due
modi è quello scelto da Newton, e sebbene causò a lui, e a molti dei
suoi contemporanei, notevoli problemi concernenti la natura occulta
della forza gravitazionale, essa, tuttavia, rappresentava la scelta giusta
per il17° secolo e per la matematica che poteva essere ragionevolmente
disponibile a quell’epoca. Il secondo modo è quello utilizzato da A.
Einstein nel 1915. In quest’epoca la matematica si era sviluppata in
forme tali da rendere possibile sia la dimostrazione della validità della
distinzione aristotelica fra moti naturali e moti violenti, sia l’esistenza
tuttavia dei moti misti.
5. HUYGENS E LA SINTESI NEWTONIANA
La sintesi newtoniana si fonda molto sulle idee di Kepler e
Galilei e anche su quelle di Cristian Huygens (1626-95),
che era quasi contemporaneo di Sir Isaac Newton (16421727). I due grandi contributi apportati dalle ricerche del
fisico olandese furono, in primo luogo, il chiarimento della
teoria dell’urto per mezzo della nozione di relatività del
moto, che egli comprese meglio e più pienamente di
Galilei; in secondo luogo, la formulazione della nozione di
forza centrifuga sulle stesse linee della forza
gravitazionale, secondo il primo dei due modi di procedere
sopra indicati come l’eredità di Galilei.
Huygens era un seguace di R. Descartes (1596-1650)e si
impegnò a correggere l’errata teoria cartesiana dell’urto,
postulando in primo luogo, che <<il moto dei corpi e le
loro velocità, uniformi o non uniformi, devono essere
intesi relativamente ad altri corpi, che sono considerati in
uno stato di quiete anche se essi insieme agli altri prendono
parte ad un ulteriore moto comune>> [Tractatum de motu
et vi centrifuga, 1703]. Il Tractatum fu pubblicato solo
dopo la sua morte, ma i teoremi principali, senza le
dimostrazioni, furono pubblicati nel 1673. Quest’evento
rappresenta, in effetti, un caso fortunato, perché tali
teoremi fornivano tutte le nozioni di cui Newton aveva
bisogno per la sua sintesi nei PRINCIPIA MATHEMATICA
PHILOSOPHIAE NATURALIS (1687) cioè quelle di forza,
inerzia, urto, moto relativo.
Newton ha dato come preambolo alle sue leggi 8
definizioni, di cui solo quattro sono utili:
Definizione 1. La quantità di materia (massa) è la misura
della medesima ricavata dal prodotto della densità per il
volume della materia.
Definizione 2. La quantità di moto è la misura del
medesimo ricavata dal prodotto della velocità per la
quantità di materia.
Definizione 3. La forza insita (vis insita) della materia è la
sua disposizione a resistere; per cui ciascun corpo, per
quanto sta in esso, persevera nel suo stato di quiete o di
moto rettilineo uniforme.
Definizione 4. Una forza impressa è un’azione esercitata
su di un corpo al fine di mutare il suo stato di
quiete o
di moto rettilineo uniforme.
Legge 1. Ciascun corpo persevera nel proprio stato di
quiete o di moto rettilineo uniforme, eccetto che sia
costretto a mutare quello stato da forze impresse.
Legge 2. Il cambiamento di moto è proporzionale alla
forza motrice impressa, ed avviene lungo la linea retta
secondo la quale la forza è stata impressa.
Legge 3. Ad ogni azione corrisponde una reazione
uguale e contraria: ossia, le azioni di due corpi sono
sempre uguali tra loro e dirette verso parti opposte.1
FORZA: è una misura dell’intensità di interazione dei corpi che si
manifesta attraverso una variazione delle loro quantità di moto.
“Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter in
directum nisi quatenus a viribus impressis cogitur statum illum mutare”
2. “Mutationem motis proportionalem esse vi motrici impressae, et fieri secundum
lineam rectam qua vis illa imprimitur.”
3. “Actioni contrariam semper et aequalem esse reationem: sive corporum duorum
actiones in se mutuo semper esse aequales et in partes contrarias dirigi”.
1
1.
L’influenza di un altro corpo (o corpi) che causa l’accelerazione
del corpo A è indicata come una FORZA. Perciò un corpo
accelera se una forza agisce su di esso. Una delle caratteristiche
più significative di una forza è la sua origine materiale. Quando si
parla di forza, sempre implicitamente assumiamo che in assenza
di corpi estranei la forza che agisce sul corpo in questione sia
uguale a zero.
FORZE
DI CONTATTO DIRETTO (forze di campo dovute ad atomi e molecole)
DI CAMPO
In definitiva tutte le forze sono causate da campi.