(v")
Cinematica: moto in una dimensione
II parte
6) Ricostruzione della legge oraria a partire da a(t) o v(t)
Un problema fondamentale, che è possibile ritrovare in diverse forme in vari campi della
Fisica, è il seguente: come prevedere o ricostruire le caratteristiche del moto di un corpo dalla
conoscenza della sua funzione accelerazione a(t) (o eventualmente dalla conoscenza della sua
velocità v(t)). Questo é anche il problema centrale della dinamica, come si vedrà studiando le
leggi di Newton. Un primo approccio al problema può essere fatto per via grafica, ad esempio
con la costruzione del grafico di x(t) e v(t) a partire dal grafico di a(t), sfruttando regole
qualitative come fatto nel paragrafo precedente.
Più propriamente, dobbiamo ricordare che le tre grandezze cinematiche sono legate tra
loro da operazioni di derivazione (formula (6)); poichè sappiamo dalla Matematica che
l’operazione inversa della derivazione di una funzione è l’integrazione, avremo uno schema
operativo di questo tipo:
x = x (t )
{
⇐
{
v = v (t )
⇐
integrazione
a = a (t )
integrazione
(7)
Consideriamo dapprima il problema di costruire la funzione posizione x(t) ammettendo di
conoscere la funzione velocità istantanea v(t). Un primo metodo usa il concetto matematico di
integrale indefinito; poiché v(t) è la derivata di x rispetto al tempo, si ha che x deve essere
una funzione primitiva di v nella variabile indipendente t, e si può scrivere:
v (t ) =
dx
dt
⇒
x(t ) = ∫ v (t ) dt + C
(8)
dove C è un’opportuna costante, detta costante di integrazione. Il suo valore può essere
trovato semplicemente imponendo che al tempo fissato t0 il valore della coordinata x sia stato
assegnato a priori, cioè x(t0) = x0, dove x0 é una condizione iniziale nota del problema in
esame. Naturalmente per risolvere questo tipo di problema si possono usare le regole di
integrazione note dalla Matematica.
Più pratico e interpretabile in termini fisici è però il secondo metodo, detto dell’integrale
definito. La formula differenziale (2), dx = v(t) dt (inversa della derivata), ci fornisce già
lo spostamento infinitesimo dx effettuato durante l’intervallo infinitesimo dt, conoscendo
il valore della funzione v(t); per ottenere uno spostamento macroscopico, cioè l’intervallo ∆x
= xf – xi, percorso dal corpo nell’intervallo temporale da ti a tf, non dobbiamo fare altro che
sommare su un gran numero di spostamenti microscopici consecutivi (piccoli passi), partendo
dall’estremo inferiore dell’intervallo xi e arrivando all’estremo superiore xf :
∆x = x (t f ) − x(ti ) =
∑ dx = ∑ v(t) dt
f
f
i
i
(9)
dove nell’ultimo membro si dovranno sommare i vari addendi v(t) dt, a partire dall’estremo
inferiore dell’intervallo temporale ti per finire all’estremo superiore tf. Ma questa somma su
infinitesimi (intervalli piccoli a piacere) non é altro che la formula fondamentale del calcolo
integrale; quindi x(t) é una funzione primitiva di v(t) e vale:
∆x = x(t f ) − x(ti ) =
∫
tf
ti
v (t ) dt
(10)
Lo spostamento ∆x effettuato dal corpo nell’intervallo di tempo ∆t é dato operativamente
calcolando l’integrale definito della velocità tra gli estremi temporali fissati, in altre parole
trovando una funzione primitiva di v(t) e facendo la differenza tra i valori che essa
assume agli estremi dell’intervallo di integrazione (in questo caso i tempi tf e ti).
Se consideriamo un tempo generico t come estremo superiore, al posto del tempo tf
fissato a priori, possiamo scrivere subito la formula :
t
x (t ) =
v (t ) dt + x(ti )
∫ ti
(11)
che fornisce la funzione posizione x al tempo t, dall’integrale definito di v(t) e dalla
posizione al tempo iniziale ti (in realtà non è altro che la (8) scritta in modo diverso).
Allo stesso modo possiamo risolvere il secondo problema della (7), cioè come ricavare la
funzione velocità dalla conoscenza dell’accelerazione istantanea a(t). Partendo dalla formula
per i differenziali (5), dv = a(t) dt, e ripetendo i discorsi fatti, abbiamo direttamente :
∆v = v(t f ) − v (ti ) =
∫
∫
tf
ti
a (t ) dt
(12)
per la variazione di velocità riscontrata nell’intervallo temporale considerato, e
v(t ) =
t
a (t ) dt + v(ti )
ti
(13)
per la funzione velocità all’istante generico t, conoscendo la velocità al tempo iniziale ti.
Passiamo ora ad alcune applicazioni di queste formule, per mostrare come usare
correttamente questi strumenti matematici in casi semplici. E’ molto importante cercare di
acquisire una certa dimestichezza con i concetti di derivata ed integrale, in modo da essere
in grado di affrontare e capire anche le problematiche più complesse che si presentano in altri
settori della Scienza.
Come utile esercizio, si esegua sempre una “prova” dei risultati trovati, cioè si verifichi
che operando la derivata rispetto al tempo di una funzione calcolata eseguendo un integrale, si
ritrovi la funzione integranda di partenza; in altre parole si controlli esplicitamente che la (6) e
la (7) sono entrambe verificate.
7) Applicazioni : il moto rettilineo uniforme
Si definisce “uniforme” un moto che avviene con velocità costante, v(t) = v0 fissata (e
quindi con accelerazione zero). Dalla formula di integrazione (10) e dalle regole di
integrazione di una funzione costante (la costante esce dall’integrale) abbiamo:
x(t f ) − x(ti ) = ∫
tf
ti
v 0 dt = v 0
∫
tf
ti
dt = v 0 [t ]tif = v 0 (t f − ti )
t
e quindi ∆x = v0 ∆t, spostamento proporzionale all’intervallo temporale. Inoltre, se
all’estremo superiore prendiamo un tempo variabile t, e assegniamo la posizione iniziale x0 =
x(ti) al tempo iniziale ti, dalla formula (11) si ha :
x (t ) = ∫
t
ti
v 0 dt + x0 = v 0 (t − ti ) + x0
che ci dà la funzione posizione a tutti i tempi t, ed è rappresentata
graficamente sul piano t-x da una retta di pendenza v0 , che passa per il
punto (ti , x0). Nel caso che si scelga ti = 0 s, si ha la nota formula:
x(t ) = x0 + v 0 t
e si verifica che derivando x(t) rispetto al tempo si riottiene la velocità v0.
x
x0
ti
t
8) Moto con accelerazione costante (o uniformemente accelerato)
Questo è un caso molto comune. Ad esempio, la caduta libera dei corpi rientra in questa
categoria: tutti i corpi sono sottoposti all’accelerazione di gravità, pressoché costante se la
variazione di altitudine non è grande. Come è d’uso in questo tipo di problemi, scegliamo per
convenienza il tempo iniziale a zero, vale a dire ti = 0 secondi. Inoltre assegniamo la
velocità iniziale v0 = v(0) e la posizione iniziale x0 = x(0) come quantità note.
Come primo passo ricaviamo al tempo t qualsiasi, la funzione velocità di un corpo
sottoposto all’accelerazione costante a ; dalla formula di integrazione (13) si ha:
v(t ) = v 0 + ∫ a dt = v 0 + a ∫ dt = v 0 + a [t ] 0 = v 0 + a t
t
t
0
0
t
che ci mostra che la velocità istantanea è una funzione lineare del tempo. Da questa
espressione e dalla formula (11), usando le regole di integrazione per le somme e per le
potenze, ricaviamo la funzione posizione al tempo t :
t
t
t
t
0
0
0
x (t ) = ∫ v(t ) dt + x0 = ∫ (at + v 0 ) dt + x0 = ∫ a t dt + ∫ v 0 dt + x0 =
0
=a
[t]
1
2
2
t
0
+ v 0 [t ] 0 + x 0 =
t
1
2
a t 2 + v 0 t + x0
risulta quindi che la coordinata posizione è una funzione del tempo al quadrato, come già
osservato nel caso dei corpi in caduta libera. Queste formule che abbiamo ora ricavato, e che
riscriviamo nella forma più comune:
x ( t ) = x 0 + v 0 t + 12 a t 2
v (t ) = v 0 + a t
(14)
risolvono completamente il problema del moto unidimensionale con accelerazione costante;
per ogni tempo ci danno la posizione x(t) e la velocità v(t), una volta assegnate le condizioni
iniziali x0 e v0 . Una rappresentazione grafica di queste funzioni, in un caso in cui a > 0 e si è
preso v0 < 0 è la seguente:
x
v
a
·
x0
0
t
·
0 v
0
t
0
t
Lasciamo per esercizio verificare che dalla definizione v(t) = dx / dt e applicando le regole di
derivazione sull’espressione di x(t), si riottiene la formula per la velocità v(t), come deve
essere.
9) Caduta libera dei corpi
Questo esempio non è altro che un’applicazione del caso precedente, quando si considera
un oggetto che viene lasciato cadere da fermo (v0 = 0) e dall’altezza h rispetto al suolo, e
quindi è sottoposto all’accelerazione di gravità g = 9.8 m/s2, costante e diretta verso il basso.
Usando le formule (14), la coordinata verticale y e la velocità vy saranno date da:
y (t ) = h − 12 g t 2 ;
v y = −g t
ritrovando la legge della dipendenza quadratica dal tempo.
10) Oscillazioni forzate
Questo è il caso che si presenta quando un sistema (un’altalena, una molla di un
ammortizzatore) è sottoposto ad un’accelerazione variabile nel tempo in modo periodico,
secondo una funzione di tipo sinusoidale, come quella rappresentata in figura:
a0
a (t ) = a0 cos(ω t )
(15)
0
2
4
6
8
10
t
dove a0 è la massima accelerazione (in modulo), e ω è una costante fissata detta pulsazione.
Poniamo al solito il tempo iniziale uguale a zero, e la velocità iniziale v0 = 0 per semplicità
(come effettivamente succede nel moto oscillatorio: quando l’accelerazione è massima la
velocità è zero); per trovare la velocità istantanea di questo sistema a tutti i tempi, si possono
applicare le regole di integrazione con cambiamento di variabile da t a y = ω t (e quindi dy =
ω dt):
t
t
ωt
0
0
0
v(t ) = ∫ a(t ) dt = ∫ a0 cos(ω t ) dt = ∫
=
a0
ω
a0
ω
cos( y ) dy =
[sen( y)]ω0 t = a0
ω
sen(ω t )
e quindi anche la velocità risulta essere una funzione sinusoidale del tempo, con il valore
massimo pari a a0 / ω, ma sfasata rispetto all’accelerazione allo stesso modo in cui sono
sfasate tra loro le funzioni seno e coseno.
a
ω
0
t
0
5
10
15
Si può proseguire calcolando come varia nel tempo la funzione posizione x(t); per ottenere un
risultato significativo è però necessario scegliere con attenzione la posizione iniziale.
11) La riproduzione delle cellule e la funzione esponenziale
Un classico metodo usato in biologia per ottenere numerose cellule identiche a partire da
un solo genitore, a scopo di studio, è quello di porre le cellule in esame in un terreno di
coltura apposito, in modo che l’abbondanza di sostanze nutritive le stimoli a riprodursi. La
descrizione matematica di questo fenomeno è un semplice esempio di “dinamica delle
popolazioni”, settore scientifico di interesse, ad esempio in campo biologico ed ecologico.
Vogliamo studiare come evolve nel tempo una popolazione di cellule in queste
condizioni; supponiamo per esempio di avere in un certo istante una coltura di N cellule, e
che, data la grande disponibilità di cibo, ogni cellula abbia la stessa probabilità di riprodursi in
un certo intervallo di tempo. Se definiamo una velocità di crescita della coltura (cioè la
variazione del numero di cellule nell’unità di tempo) è evidente che più è grande N, più sarà
grande la variazione ∆N = N(tf) – N(ti) del numero di cellule che si osserva nell’intervallo di
tempo ∆t = tf – ti; in altre parole la velocità di crescita in un certo istante è proporzionale
al numero di cellule presenti.
Considerando intervalli di tempo piccoli, al limite infinitesimi dt (in cui si avrà quindi
una crescita infinitesima dN del numero di cellule), la velocità di crescita è al solito la
derivata rispetto al tempo della funzione N(t), e per quanto detto si deve avere:
v crescita
dN
dt
=
=
K ⋅ N (t )
(16)
dove K è una opportuna costante di proporzionalità (che deve avere le dimensioni
dell’inverso di un tempo per essere coerente con le unità di misura della velocità, [K ] = T −1 ).
Questa formula è una equazione differenziale, cioè una equazione dove compare la
derivata temporale della funzione in esame (in questo caso il numero di cellule al tempo t,
N(t)). Come nei paragrafi precedenti, con una operazione di integrazione possiamo risolvere il
problema e trovare il numero di cellule presenti al tempo qualsiasi t. Questo può essere fatto
in vari modi; un metodo di calcolo standard è usato nel paragrafo seguente, qua usiamo un
sistema più diretto.
Guardando la formula (16), e trascurando per ora il parametro costante K, osserviamo che
a destra vi è la funzione N(t), a sinistra vi è la sua derivata. Si tratta quindi di una funzione
che risulta uguale alla propria derivata, a meno di parametri costanti. Una funzione che
abbia questa proprietà effettivamente esiste, ed è la funzione esponenziale (la sua forma
standard in Matematica è f(x) = ex ). Per risolvere il nostro problema e ricostruire la N(t),
consideriamo quindi una funzione esponenziale del tempo del tipo più generale
N (t )
=
a ebt
(17)
dove a e b sono dei parametri costanti, da determinare; applicando le regole di derivazione ne
calcoliamo la derivata, che risulta:
dN
d (a e b t )
=
= a b e b t = b N (t )
dt
dt
E’ quindi evidente che l’espressione (17) soddisfa l’equazione differenziale (16) se poniamo il
parametro b = K ; l’altro parametro si può determinare osservando che all’istante t = 0 s (il
tempo iniziale per convenzione) si ha N(0) = N0 = a, cioè il parametro a rappresenta il numero
di cellule all’istante iniziale (la condizione iniziale).
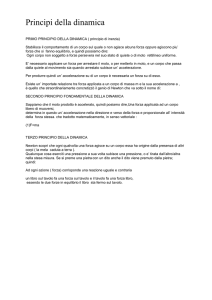
Concludendo, il numero di cellule nella coltura evolve nel tempo, a partire da N0 (numero
di cellule presenti al tempo iniziale scelto) secondo l’ espressione:
N (t )
=
N 0 eK t =
N 0 e t /τ
(18)
dove si è sostituito 1/τ al posto di K, secondo una
70
N(t)
convenzione d’uso generale in questo tipo di problemi.
60
Questa formula ci dice che N(t) ha una crescita
50
esponenziale, regolata dal parametro caratteristico τ,
40
detto costante di tempo e misurato in secondi, e che si
trova all’esponente sotto t. Una rappresentazione
30
grafica di questa legge è a fianco, costruita prendendo
20
(ad esempio) N0 = 5 e τ = 0.8 s; osserviamo che per
10
ogni intervallo ∆t = τ il numero di cellule cresce di un
N
0
0
fattore e ∆t /τ = e1 = 2.718 . Naturalmente la crescita non
0
1
2
3
4
continuerà all’infinito, prima o poi il cibo verrà a
mancare!
Leggi di tipo esponenziale si incontra spesso in Fisica (un classico esempio lo vediamo
nel prossimo paragrafo, un altro esempio è lo studio del decadimento radioattivo) e non solo,
come ha mostrato questo semplice esempio biologico; l’attività degli enzimi che dipende dalla
concentrazione di certe proteine, il consumo di ossigeno di piccoli animali che dipende dalla
t
temperatura ambiente, e infiniti altri casi possono essere citati come applicazione della
funzione esponenziale.
12) Un altro problema: la resistenza al movimento in un fluido (facoltativo)
Un corpo in movimento in un fluido è sottoposto a una forza ritardante che tende a
rallentarne il movimento; si pensi alla resistenza dovuta alla viscosità che si oppone al moto
nell’acqua, o alla resistenza dell’aria che rallenta il moto di un veicolo. In molti casi questa
situazione può essere descritta nel modo seguente: il corpo è sottoposto ad un’accelerazione
negativa (decelerazione) proporzionale alla velocità, a = -k v, con k costante assegnata.
Consideriamo il problema di un oggetto, non dotato di propulsione propria, che viene posto
in movimento in orizzontale alla velocità iniziale v(0) = v0 ; siamo interessati a sapere come
varia la sua velocità nel tempo e quanto spazio percorre prima di arrestarsi. La formula
integrale (13) non può essere usata, poiché nel nostro caso l’accelerazione è funzione della
velocità e non del tempo. Vediamo comunque come formulare esattamente il nostro
problema.
Partendo dalla definizione di accelerazione (3), sostituiamo la sua espressione e troviamo:
⇒
dv
=a
dt
dv
=−k v
dt
Questa è una equazione differenziale per la velocità funzione del tempo v(t), ed è simile
alla (16) del paragrafo precedente, quindi possiamo risolverla con lo stesso sistema e
sappiamo già che la soluzione è una funzione di tipo esponenziale. Utilizziamo però un
metodo più diretto; invertendo la formula precedente abbiamo:
−
dv
= dt
kv
che è una formula per i differenziali, in cui a sinistra compare solo la variabile v, e a destra
solo la variabile t . A questo punto, come fatto nel paragrafo 6, possiamo sommare sui
differenziali per ottenere delle variazioni macroscopiche delle variabili. A sinistra l’estremo
inferiore dell’intervallo su cui si somma sarà il valore della velocità iniziale v0 , mentre
l’estremo superiore sarà la velocità v al tempo t; a destra della equazione, l’estremo inferiore è
il tempo iniziale (scelto al solito zero), mentre l’estremo superiore è t . Le somme su
infinitesimi diventano al solito degli integrali, a sinistra nella variabile v e a destra nella t :
∑ −
v0
v
t
dv
= ∑ dt
k v
0
⇒
⇒
∫v 0 −
v
t
1
dv = ∫ dt
0
k v
⇒
Calcolando questi integrali con le regole note dalla Matematica otteniamo:
−
1
k
[ln( v ) ] vv
= [t ] 0
t
0
− k1 ln( vv0 ) = t
ln( vv0 ) = − k t
dove ln(v) è il logaritmo naturale di v. Ricaviamo infine la velocità v(t) passando
all’esponenziale:
e
ln( vv )
0
= e−k t
⇒
v
= e−k t
v0
e ottenendo la nota legge che ci mostra come la
velocità iniziale diminuisce e va a zero secondo una
funzione di tipo esponenziale decrescente
v(t ) = v 0 e −t τ
v(t)
v0
t
0
(19)
0
2
4
6
8
che è il prototipo di leggi analoghe che si ritrovano spesso in vari campi. La formula (19) è
scritta nel modo standard ponendo τ = 1/k (vedi anche la (18)), che è un importante fattore in
tutti i problemi dove si ha una variabile che decresce col tempo in modo esponenziale, e
prende il nome di “costante di tempo”.
Possiamo anche calcolare lo spazio percorso dal corpo in funzione del tempo (partendo
dalla posizione iniziale x0 = 0 m, per semplicità); qua non abbiamo difficoltà poiché la
velocità è data in funzione del tempo, per cui:
t
t
t
0
0
0
x (t ) = ∫ v(t ) dt = ∫ v 0 e − t τ dt = ∫ v 0 τ e − t τ d (t / τ ) =
[
= v0 τ − e−t τ
]
t
0
= v 0 τ (1 − e − t τ )
quindi si ha ancora una legge di tipo esponenziale; la
distanza totale percorsa dal corpo prima di arrestarsi
si ottiene per tempi t → ∞, e risulta x(∞) = v0 τ.
x(t)
v0τ
0
2
4
6
t
13) Conclusioni
Abbiamo visto solo alcuni esempi in cui le leggi fisiche vengono ricavate, o i problemi
risolti, utilizzando strumenti matematici noti come derivazione e integrazione e con l’ausilio
di rappresentazioni grafiche. In altri capitoli del programma questi strumenti verranno
largamente usati, essendo fondamentali per una corretta descrizione delle leggi della Fisica e
più in generale delle leggi della Natura.
(v")