Progetto SHARKLIFE
Sintesi dell’Azione C.2
Nell’ambito del progetto SharlLife, l’unità di ricerca dell’Università della Calabria, Laboratorio di
Elettronica NEXUS del Dipartimento di Ingegneria Informatica, Modellistica, Elettronica e Sistemistica
(DIMES), coordinata dal Prof. Calogero Pace, ha sviluppato una rete da posta sensorizzata.
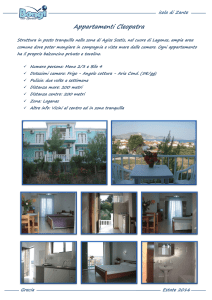
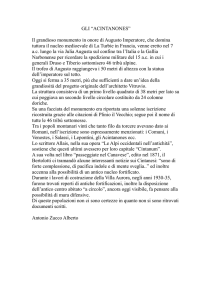
La struttura della rete a tramaglio sommersa è illustrata in Fig. 1:
Fig. 1 Schema completo del prototipo operativo di rete a tramaglio sensorizzata
Essa è costituita da una classica rete a tramaglio a tre strati, due esterni a maglia larga e uno interno a maglia
più fitta. E' zavorrata da una fune piombata e sostenuta in posizione verticale da una fune dotata di
galleggianti. La rete è alta circa due metri ed è costituita da tratti da 50 metri, detti "pannelli", che vengono
uniti tra loro per raggiungere la lunghezza desiderata. Nell'uso comune, essa viene stesa per tratti che vanno
dai 250 ai 500 metri, a seconda del tipo di pesce da pescare e del tipo di fondale prescelto, che può avere una
profondità compresa tra i dieci e i cento metri. Ogni rete deposta è collegata, mediante funi che ne
permettono il recupero da entrambi i lati, a due boe galleggianti.
E' stata adottata una architettura che prevede una boa Master e un certo numero di boe Slave. La boa Master
svolge la funzione di boa di segnalazione galleggiante. Essa contiene inoltre l'unità di raccolta e
comunicazione dati ed è in grado di effettuare un collegamento dati attraverso la rete telefonica cellulare,
verso un Server Web. Quest’ultimo rende disponibile l’accesso alle informazioni e il controllo del sistema
mediante una pagina web, a cui l'utente accede anche tramite un tablet o uno smartphone tramite un’apposita
App.
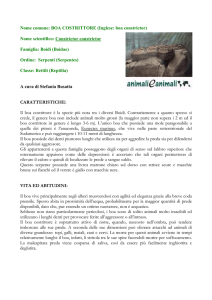
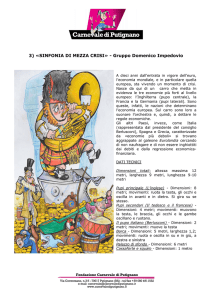
I moduli Slave sono costituiti da boe immergibili capaci di operare alla profondità di almeno cento metri
(Fig. 2). Essi ospitano i sensori e sono connessi al modulo Master mediante un cavo marino cablato, che
provvede altresì alla loro alimentazione. La configurazione dei sensori delle boe Slave prevede la rilevazione
delle vibrazioni, della profondità, dell’intensità del suono e dello stato trazione delle funi;
Sulla boa master è presente un ricevitore GPS. esso è stato previsto per rilevare gli spostamenti della boa
Master, i quali potrebbero essere conseguenza del trascinamento da parte di un grosso pesce o altre cause
accidentali (interferenza da parte di imbarcazioni, furto, etc.).
I dati provenienti dai sensori, contenuti nei moduli Slave sommersi, sono memorizzati dal modulo Master
galleggiante e periodicamente inviati al server remoto tramite la connessione dati. Un programma,
funzionante sul server remoto, rende disponibile, tramite il web, una interfaccia utente grafica per la
visualizzazione in tempo reale dei dati e per il download dei files registrati.
Fig. 2 Rilascio e posizionamento della Boa Slave durante la sperimentazione
Per il test del sistema sono state organizzate diverse missioni presso i Parchi Nazionali dell’Asinara e di La
Maddalena. Per simulare l’evento di cattura ci si è avvalsi della collaborazione di un subacqueo dotato di
autorespiratore per la simulazione delle sollecitazioni causate sulla rete dalla cattura di un pesce di grossa
taglia. Durante tali esperimenti, l'operatore si è calato alla profondità di circa 20 metri, ha raggiunto la rete e
ha effettuato una serie di manovre di strattonamento e sollevamento, in corrispondenza della boa sensorizzata
e, via via, lungo la rete ad intervalli di 10 metri. Il sistema ha dimostrato di essere sensibile alle vibrazioni
trasmesse dal cavo sommitale della rete fino a distanze dell'ordine del centinaio di metri. Il sensore di
pressione ha correttamente rilevato il sollevamento della boa rispetto alla profondità di posa. L'idrofono ha
rilevato la presenza di suoni generati artificialmente in sua prossimità, quali il getto d'aria del respiratore o il
passaggio del motoscafo di appoggio al di sopra della rete. Il sensore di forza ha correttamente rilevato lo
stato di trazione della fune.
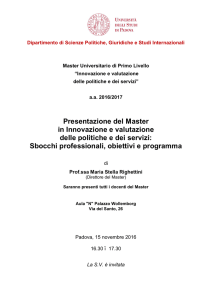
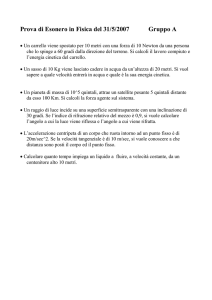
In Fig. 3 è riportato un esempio di schermata web, con l'inserimento di alcuni commenti esplicativi, in cui
l'utente dotato di opportune credenziali d'accesso può visualizzare i dettagli degli esperimenti ed effettuare il
download dei dati acquisiti.
Del sistema, che per le sue caratteristiche definiamo come “prototipo operativo”, sono stati realizzati tre
esemplari. La struttura modulare della rete trova la sua giustificazione non soltanto per esigenze costruttive
ma, soprattutto, per esigenze applicative. La gestione di una rete sensorizzata lunga centinaia di metri, infatti,
porrebbe seri problemi di gestione (trasporto, immagazzinamento, etc.) ai pescatori, principalmente a causa
del peso, molto più elevato rispetto al tramaglio tradizionale. Inoltre, la struttura modulare rende più agevoli
le operazioni di pulizia della rete stessa dalle alghe (molto frequenti nell'uso comune), un'esigenza emersa in
fase di test del primo prototipo. Inoltre, in previsione di inevitabili problemi di affidabilità dei prototipi, la
soluzione modulare permette di intervenire più agevolmente sulle parti difettose, senza compromettere
l'utilizzabilità dell'intero sistema che prevede un certo grado di ridondanza.
Fig. 3 Sito web per il monitoraggio del primo prototipo di rete sensorizzata
Al termine del progetto si è giunti alla conclusione, condivisa con i pescatori, che il sistema sviluppato è
compatibile con le normali attività di pesca. Esso non causa variazioni nella quantità o nella qualità del
pescato. La possibilità di avere sotto controllo la posizione della boa Master e di monitorare a distanza
attività di traffico anomalo di eliche intorno alla rete (rilevato dagli idrofoni) o il suo sollevamento (rilevato
dai sensori di pressione) costituisce uno strumento di salvaguardia interessante nei confronti dei tentativi di
furto del pescato o della rete. Ciò compensa la maggior complicazione d’uso e potrebbe portare i pescatori
alla decisione di adottare il sistema, soprattutto se, in aree sottoposte a vincolo ambientale, il costo
aggiuntivo fosse coperto da interventi di agevolazione totale o parziale da parte dell’ente responsabile.
Durante la sperimentazione in mare non si sono verificati episodi di cattura di grandi animali, ma le
sperimentazioni condotte con l’ausilio del sommozzatore hanno dimostrato che il sistema è in grado di
rilevare l’evento di cattura di uno squalo elefante, o anche di un animale di taglia significativamente minore,
anche se esso avviene nella zona della rete meno sensibile, ovvero in mezzo a due boe Slave. Da una prima
valutazione dei dati raccolti durante tali prove, emerge che è possibile individuare in modo automatico
l’occorrenza di eventi di allarme tali da giustificare l’invio di messaggi di allerta via SMS volti a sollecitare,
dopo l’opportuna osservazione dei segnali trasmessi in tempo reale, l’eventuale intervento delle autorità del
parco o dei pescatori.
Azioni successive alla conclusione del progetto
L’azienda fornitrice del sistema di monitoraggio si è resa disponibile a mantenere attivo, per la durata di
almeno un anno, il sito web e il sistema di registrazione dati dai tre differenti prototipi operativi. I pescatori,
dal canto loro, hanno dato disponibilità a proseguire nella sperimentazione con i tre sistemi, trovando
vantaggiosa, tra l’altro, la possibilità di usufruire del pescato. Il team UniCal, dopo aver ulteriormente
rinforzato le contromisure volte a migliorare l’affidabilità dei tre sistemi ed aver riparato i componenti
guasti, è pronto a riprendere la sperimentazione allo scopo ampliare la quantità di dati acquisiti e di poter
testare, a scopo scientifico, veri eventi di cattura di grandi animali marini. Si pensa di poter dare corso a tali
propositi già nella prossima stagione utile di passaggio degli squali elefante di Febbraio-Maggio 2016.