Appunti dalle lezioni di STA
Modulo impianti civili e industriali
Lezione 2
Per quanto riguarda ulteriori approfondimenti sugli schemi di montaggio e
funzionali, per impianti civili, vedasi file schemario.pdf sul sito
dell’istituto nella sezione studenti materiale didattico disciplina TDP.
Fare comunque riferimento alle indicazioni, chiave di studio, date a
lezione. Per qualsiasi chiarimento contattare il docente.
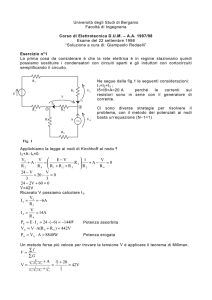
Principio di funzionamento del relè
Negli impianti elettrici sono impiegati tanti tipi di relè, il
principio di funzionamento è lo stesso: l’effetto elettrocalamita.
cui
Data una bobina realizzata con avvolgimenti in filo di rame avvolto
attorno ad un nucleo, appena si chiude un circuito e circola corrente, si
generano delle forze capaci di vincere l’azione di molle antagoniste o
movimentare levierismi vari, di conseguenza si verifica in tempi
brevissimi ( ordine dei ms) l’apertura o la chiusura di contatti, con i
quali è possibile stabilire o interrompere una corrente in un altro
circuito, che d’ora in avanti definiremo di potenza.
Con il relè si distingue un circuito di comando che è quello che
interessa la bobina e un circuito di potenza che interessa i contatti di
potenza del relè. I costruttori specificano i valori in A della massima
corrente che può attraversare tali contatti, nonché i valori ed il tipo
di tensione della bobina ( se in AC o DC).
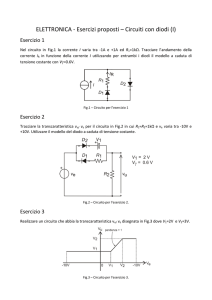
fig.1
Dove R1 indica la bobina di un altro relè.
Volutamente in fig.1 non si sono indicati i valori delle tensioni di
alimentazione, in quanto possono verificarsi ad esempio i seguenti casi:
( pedice 1 circuito di comando, 2 circuito di potenza)
1. V1=V2=24V AC (DC)
2. V1=24V AC V2=230V AC
3. V1=V2= 230V
4. V1<V2 con V2=230V o V2= 380V o V2=400V e possibili valori di V1
sono, 24,48,110,115V. ( per ulteriori dettagli è opportuno
consultare i cataloghi dei costruttori).
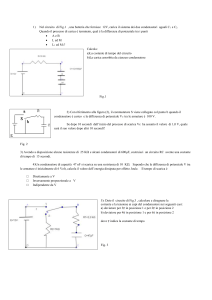
I contatti di un relè possono essere normalmente aperti ( NO) oppure
normalmente chiusi (NC). Quelli NO all’eccitazione della bobina si
chiudono, mentre i NC si aprono. Si indicano come segue:
fig.2
Distribuzione elettrica generale in bassa tensione
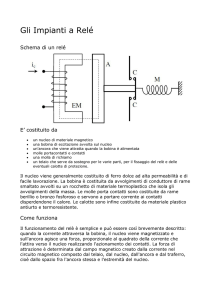
Riporitiamo in fig. 3 la struttura più generale della distribuzione
elettrica in bassa tensione:
fig.3
Tra L1 e N, L2 e N, L3 e N la tensione è di 230V 50Hz e si tratta di tre
alimentazioni monofasi. Spesso in alcuni schemi in luogo di L1, L2, L3,
si può trovare r,s,t. Le tensioni tra le fasi che valgono 400V si dicono
concatenate.
In alcuni impianti in cui il neutro non è distribuito, cioè ci sono solo
le tre fasi e il Pe, i valori possono essere di 230V tra le fasi ( 230 V
trifase). Ad esempio la linea FM nel nostro laboratorio è caratterizzata
da 230V tra le fasi.
Da quanto detto emerge un concetto basilare: dato un impianto, non dare
mai per scontato il valore della tensione tra le fasi.
Un tipico utilizzatore elettrico che sarà oggetto delle prossime
esercitazioni è il motore asincrono trifase sulla cui struttura si
ritornerà nel corso delle lezioni. Per il momento lo si consideri come un
carico che per essere alimentato, necessita dei collegamenti di tutte e
tre le fasi, più il pe di colore giallo-verde che è collegato ad un
apposito morsetto per motivi di sicurezza elettrica, in modo da far
intervenire apposite protezioni se qualcuna delle fasi, in seguito a
deterioramento dell’isolamento va in contatto elettrico con la carcassa
del motore; in tale situazione una persona che accidentalmente la tocca,
può rimanere folgorato.
In fig.4 è riportato il collegamento di un motore alla linea tramite tre
contatti di potenza di un componente che dicesi teleruttore o contattore.
fig.4
Il teleruttore
fig.5
Con riferimento alla fig.5 si notano: i morsetti di alimentazione della
bobina contrassegnati con A1 e A2 ( tensione 24V AC per quanto riguarda
quelli utilizzati in lab), i contatti ausiliari, che possono essere NO
oppure NC e aventi un amperaggio inferiore ai contatti di potenza che
sono quelli deputati ad alimentare l’utilizzatore alimentato tramite il
teleruttore. I contatti ausiliari sono invece utilizzati per la
segnalazione, per l’autoalimentazione, per implementare i dettagli del
circuito di comando in logica cablata, come ad esempio l’interblocco nel
circuito di comando per l’inversione del senso di marcia del motore.
Concetto di auto alimentazione
Dato un teleruttore la cui bobina è alimentata tramite un pulsante,
vedasi fig.1, premendo il pulsante si eccita la bobina e i contatti
ausiliari No si chiudono, i NC si aprono e contemporaneamente i contatti
di potenza si chiudono, il motore è alimentato e parte. Non appena si
rilascia il pulsante, la bobina si diseccita, i contatti ausiliari
ritornano nelle condizioni iniziali e quelli di potenza si riaprono e
conseguentemente il motore si ferma. Collegando in parallelo al pulsante
un contatto ausiliario NO del teleruttore, dopo aver premuto il pulsante
si eccita la bobina il contatto NO si chiude e mantiene alimentata la
bobina, i contatti di potenza restano chiusi il motore gira e non si
arresta. Per arrestarlo occorre installare un pulsante NC in serie al
predetto circuito e a monte. Vedasi al riguardo le fig. 6 e 7 in cui sono
riportati il circuito di comando e di potenza per la marcia-arresto di un
motore.
fig.6
fig.7
Inversione del senso di marcia di un motore trifase
Per invertire il senso di marcia di un motore trifase occorre scambiare
nel circuito di potenza due fasi, occorreranno pertanto due teleruttori,
uno per la marcia avanti e l’altro per la marcia indietro. Dato un motore
che ruota a una certa velocità, non è possibile invertirne di scatto il
verso di rotazione, si pensi ad es. a una scala mobile, un’ascensore,
inoltre se per assurdo si chiudessero contemporaneamente i contatti di
potenza dei due teleruttori, si avrebbe un cortocircuito sul circuito di
potenza. Alla luce di ciò i due teleruttori devono essere interbloccati,
in modo da non potersi mai avere l’eccitazione contemporaneamente delle
due bobine. I costruttori forniscono teleruttori che possono essere
interbloccati anche meccanicamente oltre che elettricamente ( nel modo
che sarà spiegato). In fig.8 e 9 sono riportati i circuiti di potenza e
di comando (s1 pulsante di marcia avanti, S2 pulsante di marcia
indietro).
fig.8
fig.9