G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 1 di 53
Corso di Impianti Elettrici Industriali
Parte 1B
Approfondimenti di Elettrotecnica
Per poter affrontare con efficacia i temi propri degli Impianti Elettrici Industriali è necessaria una solida
preparazione di elettronica, ma servono anche gli elementi essenziali di macchine e di impianti elettrici.
Sarebbe troppo pretenzioso considerare questi appunti come fondamenti di tali materie. Essi sono solo un
approfondimento di alcuni aspetti che in elettrotecnica sono solo accennati, e che costituiscono una
introduzione alle materie successive.
Come per la precedente dispensa sui Richiami di Elettrotecnica, anche per questa il contenuto non è quindi
esaustivo - né comunque potrebbe esserlo - data la vastità della materia. Si trattano solo gli aspetti
essenziali, cercando un compromesso tra la vastità delle implicazioni, delle correlazioni, dei passaggi
matematici e logici e la necessità di arrivare ad una formulazione fruibile in una materia applicativa qual è lo
studio degli Impianti Elettrici.
Lo studente del corso di Impianti Elettrici Industriali sia però consapevole che senza questi approfondimenti
lo studio degli Impianti Elettrici Industriali non può essere svolto proficuamente. Le prove d'esame di tale
corso potranno quindi contemplare anche domande e problemi riconducibili agli argomenti qui trattati.
L'autore si scusa di eventuali incompletezze, inesattezze o errori e resta a disposizione, fin d'ora con
gratitudine, a chi vorrà segnalargliene, affinché possano essere emendati nelle revisioni successive.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 2 di 53
Sommario
5 - Il Sistema Elettrico dalla Generazione all'Utilizzo .................................................. 3 5.1 - La generazione di energia elettrica ......................................................................................................3 5.1.1 - Gruppi termoelettrici ....................................................................................................................................... 3 5.1.2 - Il diagramma di carico ..................................................................................................................................... 4 5.1.3 - Le centrali idroelettriche .................................................................................................................................. 4 5.1.4 - Le centrali da fonti rinnovabili e alternative ..................................................................................................... 5 5.2 - La trasmissione (o trasporto) dell'energia elettrica ..............................................................................6 5.2.1 - Confronto tra trasporto in corrente continua e in corrente alternata................................................................ 7 5.2.2 - La Rete Elettrica Nazionale (RTN) .................................................................................................................. 8 5.2.3 - I parametri elettrici delle linee ......................................................................................................................... 8 5.2.4 - Le stazioni elettriche ....................................................................................................................................... 9 5.3 - La distribuzione dell'energia elettrica .................................................................................................10 5.4 - L'utilizzo dell'energia elettrica .............................................................................................................10 5.5 - La regolazione di tensione e di frequenza / potenza .........................................................................11 6 - I Sistemi Trifase ...................................................................................................... 13 6.1 - Generalità ...........................................................................................................................................13 6.2 - I vantaggi del sistema trifase ..............................................................................................................16 6.2.1 - Campo magnetico rotante............................................................................................................................. 16 6.2.2 - Ottimizzazione della trasmissione dell'energia ............................................................................................. 16 6.2.3 - Potenza istantanea complessiva senza componenti oscillatorie................................................................... 18 6.3 - I Carichi nei Sistemi Trifase ...............................................................................................................19 6.4 - Sistemi trifase simmetrici ed equilibrati ..............................................................................................20 6.5 - Sistemi trifase con neutro ...................................................................................................................21 7 - Il Trasformatore ...................................................................................................... 22 7.1 - I Livelli di Tensione .............................................................................................................................22 7.2 - Il Trasformatore monofase .................................................................................................................23 7.2.1 - Funzionamento a vuoto ................................................................................................................................ 28 7.2.2 - Funzionamento in cortocircuito ..................................................................................................................... 29 7.3 - Il trasformatore trifase ........................................................................................................................29 7.4 - Il metodo in p.u. ..................................................................................................................................33 7.5 - Cenni ai problemi termici ....................................................................................................................35 7.6 - L'autotrasformatore ............................................................................................................................36 8 - Le Macchine Elettriche Rotanti .............................................................................. 38 8.1 - Generalità ...........................................................................................................................................38 8.1.1 - Tensione su un conduttore in moto in un campo magnetico ......................................................................... 38 8.1.2 - Campo magnetico rotante............................................................................................................................. 38 8.2 - Cenni alla Macchina Sincrona ............................................................................................................42 8.3 - Cenni alla Macchina in Corrente Continua ........................................................................................43 8.4 - La Macchina Asincrona o a Induzione ...............................................................................................46 Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 3 di 53
5 - Il Sistema Elettrico dalla Generazione all'Utilizzo
L'Energia Elettrica occupa un posto rilevante nella nostra vita di ogni giorno. Perché essa possa arrivare fino
alle nostre abitazioni, alle fabbriche, ai luoghi di lavoro e di incontro occorre però che sia attivata una
complessa catena di passaggi.
5.1 - La generazione di energia elettrica
Il primo passaggio è, ovviamente, quello della produzione o generazione.
Essa avviene quasi esclusivamente in c.a. (corrente alternata), alla frequenza di 50 Hz in gran parte del
mondo, o di 60 Hz negli Stati Uniti d'America e in pochi altri paesi, prevalentemente del continente
americano. La scelta della c.a. anziché della c.c. (corrente continua) è dovuta sostanzialmente a tre motivi
principali:
a)
la facilità di conversione a vari livelli di tensione, mediante una macchina semplice e robusta come il
trasformatore;
b)
la maggiore semplicità, affidabilità, robustezza dei generatori sincroni o alternatori rispetto ai generatori
in c.c. (questi ultimi comportano, per esempio, il problema della commutazione, della manutenzione
delle spazzole, etc.);
c)
la possibilità per gli utenti di utilizzare i motori asincroni, macchine semplici, robuste, efficienti, affidabili,
autoavvianti.
5.1.1 - Gruppi termoelettrici
Il fatto che la produzione avvenga a frequenza costante comporta, nel caso che il motore primo sia una
turbina a vapore, che la potenza erogata non possa essere regolata se non entro una gamma abbastanza
ristretta di valori. Infatti le turbine a vapore, come pure altri motori termici, erogano, se funzionanti a
frequenza costante, un valore di coppia pressoché costante, o comunque con una differenza abbastanza
piccola tra il valore massimo e il valore minimo possibili per quella frequenza. E' in realtà possibile,
ovviamente, erogare coppie anche molto inferiori, ma con grave scadimento dell'efficienza. Ne consegue
che anche la potenza può subire solo limitate variazioni per regolazione. Inoltre, le centrali termiche non
possono venire spente e riaccese a piacimento, perché i transitori termici di riscaldamento e di
raffreddamento delle caldaie sono dell'ordine delle decine di ore o anche dei giorni.
Le centrali a vapore erano molto diffuse in Italia fino a pochi anni, perché nelle loro caldaie veniva bruciata la
parte meno pregiata della lavorazione del petrolio, ovvero l'olio BTZ (a Basso Tenore di Zolfo). Questo era
comunque un prodotto più pregiato rispetto all'olio ATZ (ad Alto Tenore di Zolfo), ma comunque meno
pregiato di benzina e gasolio. In Italia c'era notevole disponibilità di BTZ perché eravamo un paese
raffinatore: molta parte degli idrocarburi consumati in Europa veniva raffinato in Italia, paese più vicino alle
sorgenti petrolifere del medio oriente.
Le centrali a vapore erano equipaggiate con 3 o più gruppi di grossa taglia (potenza tipica nominale 320
MW) ed avevano rendimenti dell'ordine del 40÷42%.
Le moderne centrali con turbine a gas ("turbogas") sono in grado di accendersi e spegnersi molto più in
fretta - anche in pochissime decine di minuti - e hanno una quindi una maggiore flessibilità, ma ogni
accensione consuma parecchio combustibile e, anche per queste il funzionamento a potenza ridotta
comporta rendimenti molto inferiori a quelli nominali.
Le turbine a gas diventano però vantaggiose se combinate con turbine a vapore. Infatti, i gas di scarico
escono dalla turbine a gas a temperature ancora molto elevate, quindi con un notevole contenuto energetico
che, se non sfruttato, verrebbe gettato in atmosfera. Esso viene invece normalmente riutilizzato e con
appositivi dispositivi di scambio si svolge una funzione analoga a quella delle caldaie dei gruppi turbovapore.
Questa tecnologia prende il nome di ciclo combinato ed è in grado di raggiungere rendimenti dell'ordine del
54÷57%. Tipicamente il gruppo TV (turbovapore) nel ciclo combinato ha una potenza pari al 50÷60% circa
del gruppo TG (turbogas). Una taglia tipica attuale è: gruppo TG da 250 MW, gruppo TV da 130÷150 MW,
per un totale di 400 MW circa; oppure 2 TG da 250 MW + 1 TV da 260÷300 MW; ma esistono gruppi delle
taglie più disparate, anche di pochi MW.
La presenza del gruppo TV nel ciclo combinato comporta una maggiore rigidità nella regolazione della
potenza.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 4 di 53
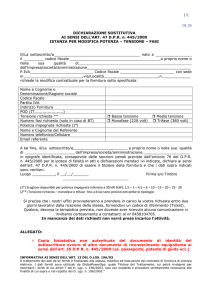
5.1.2 - Il diagramma di carico
Il consumo di energia elettrica è invece fortemente variabile nell'arco della giornata: assume valori alquanto
ridotti durante la notte, aumenta abbastanza in fretta nelle prime ore della mattina fino a raggiungere un
picco massimo verso le ore 11.00, subisce una lieve flessione tra le 12.00 e le 14.00, risale ad un secondo
picco verso le 15.00, e poi scende gradualmente e lentamente (nella serata i consumi domestici subentrano
a quelli industriali) per arrivare dopo la mezzanotte al minimo notturno. Il diagramma che indica il valore del
consumo in funzione dell'ora prende il nome di curva di carico giornaliero. Quella ora descritta è relativa ad
un giorno lavorativo: ovviamente è diversa nei giorni di sabato e di domenica; inoltre la curva di carico
presenta notevoli differenze a seconda del periodo dell'anno, sia in relazione ai fattori climatici (per esempio:
d'estate l'illuminazione artificiale è meno utilizzata che d'inverno; ma d'estate si fa ormai ampio uso dell'aria
condizionata), sia in relazione all'organizzazione lavorativa (per esempio: il mese di agosto presenta bassi
consumi elettrici perché quasi tutte le fabbriche sono chiuse per ferie; solitamente si approfitta di questo per
fermare le centrali elettriche per la manutenzione annuale).
figura 5.1 - il diagramma di carico giornaliero. Questo
diagramma è datato (1988): oggi il picco di carico (giorno
feriale estivo, in luglio) è quasi di 60 MW
Il fatto che la curva di carico presenti massimi e minimi, con forti variazioni, è un problema per il produttore,
se confrontato con il problema poco sopra accennato della limitata regolabilità della potenza erogabile nelle
centrali termiche. Se tali centrali venissero dimensionate per sopportare i picchi di carico, che sono
dell'ordine del 140-150% (o anche più) della potenza media assorbita nella giornata, ci sarebbe un esubero
di potenza nelle ore della giornata lontano dai picchi, con un spreco quindi del 40-50%. Basti pensare che in
Italia il picco di carico è di circa 60 GW, a fronte di un consumo medio di circa 36 GW (la media si calcola
sull'anno, tenendo conto anche dei giorni festivi e dei periodi di ferie): si avrebbe un esubero di oltre 24 GW,
corrispondenti a centinaia di milioni di kWh giornalieri. Inoltre buttare via potenza significa dissiparla in calore
nell'ambiente (atmosfera, fiumi, altri bacini) con conseguenze notevoli di inquinamento termico dell'ambiente
stesso, per non parlare dell'inquinamento atmosferico (CO2, NOx, zolfo, etc.) aggiuntivo. Si prendono
provvedimenti di tipo economico per incentivare il consumo notturno (sconti sull'energia elettrica, soprattutto
all'industria), ma non è possibile né sarebbe giusto sconvolgere più di tanto i ritmi naturali dell'attività umana.
5.1.3 - Le centrali idroelettriche
Il problema viene allora risolto grazie ad una opportuna gestione delle centrali idrauliche, in quanto queste
permettono una elevata regolabilità della potenza, per i motivi che saranno spiegati in quanto segue.
Nelle centrali idrauliche vengono utilizzati tre diversi tipi di turbine, a seconda del salto utile, cioè della
differenza di quota tra il livello del bacino di accumulo e il livello dello scarico della turbina.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 5 di 53
Per salti superiori ai 400 m vengono utilizzate le turbine Pelton. Per mezzo di una opportuna valvola ad
ugello l'energia potenziale e di pressione dell'acqua viene trasformata in energia cinetica; il getto con
elevatissima velocità ( v =
2 gh ; per esempio con un salto di 400 m si ha v = 2 ⋅ 9.81 ⋅ 400 = 88.6 m s ,
pari a circa 320 km/h) colpisce le pale della turbina, ne viene deviato fino ad uscirne con velocità pressoché
nulla, cedendo alla turbina tutta la sua energia cinetica (che a sua volta è una trasformazione dell'energia
potenziale gravitazionale).
Per salti compresi tra i 50 m e 450 m si usano le turbine Francis, turbine con un certo grado di reazione
(l'energia potenziale si trasforma parte in energia cinetica parte in energia di pressione).
Per salti invece molto piccoli, fino ad 80 m, si usano turbine ad elica e turbine Kaplan, queste ultime con
pale regolabili a seconda del dislivello: vengono usate soprattutto sui fiumi, ideali per portate molto elevate
(anche centinaia di metri cubi al secondo) con salti relativamente piccoli. Si tratta di turbine con elevato
grado di reazione.
Tutte queste turbine hanno rendimenti elevati (superiori al 90%) in un ampio range di valori; inoltre è
possibile la parzializzazione, cioè l'alimentazione parziale chiudendo alcune bocche di alimentazione,
ottenendo valori elevati di rendimento in un range dal 15-20% al 100% della potenza nominale; e comunque
è possibile spegnere o riavviare tali turbine con manovre della durata di poche decine di secondi o di pochi
minuti, in quanto non si presentano i lunghi transitori termici delle centrali termoelettriche, ma solo i transitori
meccanici di fermata o di partenza dell'acqua nelle condotte o di arresto e di avvio dei generatori sincroni
(l'acqua e i rotori presentano una notevole inerzia meccanica).
Le centrali idrauliche si presentano pertanto come candidate ideali per far fronte ai picchi di carico, in quanto
i bacini idraulici a monte permettono un razionale accumulo dell'energia. A seconda degli orari vengono
attivate solo le turbine necessarie per coprire il fabbisogno istantaneo.
Tuttavia, assegnando alle centrali termiche un valore di potenza pari al consumo minimo giornaliero e
affidando alle centrali idrauliche il compito di fornire la potenza aggiuntiva necessaria ai picchi, queste non
riuscirebbero a fornire tutta l'energia richiesta (almeno nel caso italiano), perché i bacini si svuoterebbero in
breve tempo.
Pertanto le termiche funzionano ad una potenza superiore al minimo giornaliero; in tal modo di notte si
presenta comunque un esubero che viene però utilizzato per effettuare, nelle centrali idrauliche, il
pompaggio, ossia l'operazione di rimandare ai bacini di monte parte dell'acqua che da questi era scesa nei
bacini di valle durante i picchi di carico. In questo modo l'esubero di potenza viene almeno in parte
recuperato per essere riutilizzato nei momenti di maggior richiesta. L'operazione presenta un rendimento
dell'ordine del 65-70% (nel senso che si dissipa comunque un 15-20% nel pompaggio e un 10-15% nel
riutilizzo), ma è comunque molto meglio che buttar via tutta l'energia. Per effettuare il pompaggio, oltre alle
turbine sono montate sugli assi delle macchine anche delle potenti pompe, solitamente di tipo centrifugo; i
generatori sincroni si trasformano di notte in motori sincroni; occorre però tenere presente che il motore
sincrono non è autoavviante, pertanto: o esistono dei motori di lancio, oppure si procede in questo modo:
1)
vengono aperte le valvole della turbina che si mette così in movimento, e con essa la macchina
sincrona;
2)
dopo poche decine di secondi si raggiunge le frequenza di sincronismo;
3)
la macchina sincrona viene collegata alla rete elettrica (operazione di "messa in parallelo", da svolgersi
con attenzione perché occorre che la macchina non solo lavori alla frequenza di rete, ma anche che la
sua tensione sia uguale in modulo e fase alla tensione di rete), in modo da funzionare in modo
autonomo, senza più bisogno di motori primi;
4)
si chiudono le valvole delle turbine, l'acqua nelle condotte si ferma;
5)
si aprono la valvole delle pompe, l'acqua nelle condotte inizia a tornare su.
5.1.4 - Le centrali da fonti rinnovabili e alternative
Negli ultimi anni la consapevolezza che la disponibilità di combustibili fossili sul nostro pianeta è limitati
(entro alcuni decenni potrebbero essere esauriti) e la coscienza ambientale, soprattutto relativamente al
problema dell'effetto serra, hanno portato molte nazioni a sperimentare la generazione di energia elettrica (e
non solo elettrica) da fonti rinnovabili.
Già la generazione idroelettrica fa uso di una fonte rinnovabile ma, almeno in Europa, lo sfruttamento di tale
risorsa è già molto elevato. Ulteriori impianti sarebbero ancora possibili, ma non di grande potenza, e non
senza compiere pesanti modifiche al territorio montano.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 6 di 53
Si sono fatta così strada le fonti dette talvolta "alternative". Le principali sono:
-
l'energia eolica: la potenza insita nel vento viene sfruttata da grandi aerogeneratori, che sono di fatto
dei grossi rotori ad elica che azionano un generatore. Le taglie vanno da pochi kW a ad alcuni MW (nel
Mare del Nord sono impianti rotori con diametro di 160 m e taglie di 5 MW). Il costo di produzione del
kWh, nelle zone ventose (di cui l'Italia è povera) è in alcuni casi concorrenziale o almeno paragonabile a
quello della produzione termica tradizionale. La generazione eolica presenta il difetto di essere aleatoria
ovvero fortemente variabile in base alle condizioni climatiche, che non sono controllabili dall'uomo, e di
richiedere l'utilizzo di generatori elettrici a velocità variabile (in base alla velocità del vento). Questo
secondo problema è superato grazie all'adozione di speciali macchine asincrone a rotore avvolto
(Doubly Fed Induction Machine) e/o all'utilizzo dell'elettronica di potenza.
-
l'energia solare fotovoltaica: sfrutta l'energia dell'irraggiamento solare, mediante una trasformazione
diretta in corrente elettrica grazie a celle al silicio. Un campo fotovoltaico con potenza di picco di 1 MW
richiede, alle nostre latitudini, circa 2.5 ha (25000 m2) di terreno. Il costo dei pannelli, benché diminuito
negli ultimissimi anni, è ancora molto elevato, e rende il costo del kWh non competitivo. Questi impianti
si stanno ora diffondendo grazie alle sovvenzioni pubbliche. Anche questa fonte è aleatoria ovvero
variabile in base alle condizioni climatiche, che non sono controllabili dall'uomo.
-
l'energia solare termodinamica: sfrutta l'energia dell'irraggiamento solare, concentrando i raggi del
sole, mediante specchi o altri dispositivi, su elementi percorsi da appositi fluidi, che possono così
percorrere un ciclo termodinamico e, con i vapori in pressione così prodotti, azionare turbine. In pratica
il sole di sostituisce alla fiamma della caldaia. Potrebbero avere costi del kWh competitivi o comunque
paragonabili a quelli delle fonti tradizionali, ma vi sono ancora molti problemi tecnici che ne limitano la
diffusione ad impianti poco più che sperimentali.
-
l'energia da biomassa: sfrutta l'energia ottenibile da masse vegetali o biologiche (liquami), mediante
combustione di tali biomasse, oppure mediante la combustione dei gas da esse ottenibili mediante
svariati tipi di processi (fermentazione, digestione, pirolisi,…). Benché venga immessa CO2 in
atmosfera, questa è la CO2 che il processo di crescita del vegetale (utilizzato direttamente, o di cui si è
cibato l'animale che produce il liquame) aveva sottratto all'atmosfera, per cui il bilancio della CO2 è
nullo. I costi dipendono del kWh molto dalla tecnologia e dai prezzi di mercato dei prodotti agricoli. Si
calcola che un impianto da 1 MW richieda circa 200 ha (2 km quadrati) di superficie agricola (nella
pianura padana) per la crescita della biomassa corrispondente.
-
altre fonti "minori": energia da maree, dall'osmosi tra acqua dolce e acqua salata (ingresso in mare dei
fiumi), da sorgenti geotermiche, e altro ancora…
5.2 - La trasmissione (o trasporto) dell'energia elettrica
Subito a valle dell'alternatore si presenta un trasformatore, detto trasformatore di macchina. La funzione di
questo trasformatore è duplice: a) elevare la tensione dai 6÷20 kV della macchina sincrona a valori di alta
tensione per il trasporto a medie e lunghe distanze; b) isolare elettricamente la macchina dal resto della rete:
il trasformatore permette il passaggio di potenza e lega in modo abbastanza rigido tensioni e correnti al
primario e al secondario, ma al tempo stesso fa anche da "filtro" a fenomeni bruschi come sovratensioni di
origine atmosferica (fulmini sulla linea o nelle vicinanze), cortocircuiti (l'impedenza del trasformatore limita le
correnti di cortocircuito), etc.
Inizia da questo punto il sistema di trasmissione.
Nella rete italiana di trasmissione si utilizza, come già più volte affermato in precedenza, il sistema trifase; le
tensioni utilizzate sono i 220 e i 380 (o 400) kV (tensioni concatenate). Per tali valori si parla di alta tensione,
AT. Altri paesi, che presentano la necessita di linee lunghe anche migliaia di km (Cile, Russia) utilizzano
tensioni più elevate, fino a 700 kV.
La scelta del sistema trifase è dovuta, oltre ai motivi indicati all'inizio del paragrafo (semplicità, funzionalità
ed affidabilità delle macchine rotanti trifasi), anche ad un vantaggio nel sistema di trasporto.
Il costo di un sistema di trasporto dell'energia elettrica è in larga misura proporzionale al peso del materiale
conduttore. Rame e alluminio, che sono i conduttori più usati, hanno un notevole costo unitario (il rame in
particolar modo); peso maggiore, inoltre, significa maggior robustezza e quindi maggior costo dei sostegni
(pali e tralicci). Il progettista di un sistema di trasmissione o di distribuzione dell'energia elettrica dovrà quindi
rende minimo il valore del costo annuo complessivo, che sarà dato dalla somma della quota annua di
ammortamento e/o di interessi sul costo iniziale dell'impianto e della quota dovuta alle perdite per effetto
Joule. Una riduzione del costo delle perdite comporta conduttori con una sezione maggiore, e quindi un
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 7 di 53
maggior peso del rame o dell'alluminio, e quindi del costo iniziale. Il progettista deve trovare il miglior
compromesso tra le due esigenze.
Una indicazione della maggior convenienza del sistema trifase può essere fornita del confronto con altri
sistemi, a parità di potenza trasportata e di tensione di funzionamento, come già accennato nel par. 6.2
5.2.1 - Confronto tra trasporto in corrente continua e in corrente alternata
Un sistema in corrente continua sembrerebbe comportare le presenza di due fili, uno per l'andata e uno per il
ritorno. In realtà è possibile utilizzare solo un filo per l'andata, e fare il ritorno via terra; oppure utilizzare due
fili, uno a tensione +Vdc e l'altro a -Vdc (es. un sistema ±500 kV), in cui ogni filo fa quindi da andata per sé e
da ritorno per l'altro filo. Il sistema a ±Vdc può di fatto essere considerato come un sistema doppio, costituito
da due emistemi. L'analisi che segue si riferisce ad un sistema singolo o, che è lo stesso, ad un emisistema
di un sistema doppio.
Si ha pertanto un volume di materiale conduttore pari a:
Vol = A ⋅ l
[5.1]
dove si sono utilizzati l'area del conduttore e la lunghezza della linea.
Le perdite per effetto Joule sono pari a:
p = R⋅I2 = ρ
l 2
l P2
⋅I =ρ ⋅ 2
A
A V
[5.2]
Volendo prefissare un valore massimo p M di potenza perduta, la sezione dovrà allora essere data da:
A=ρ
l ⋅ P2
pM ⋅ V 2
[5.3]
e quindi i costi iniziali, proporzionali al peso e quindi al volume del conduttore, saranno proporzionali a:
Ci = β ⋅ A ⋅ l = β ⋅ ρ
l 2P2
pM V 2
[5.4]
dove β è il costo per unità di volume (proporzionale al peso) del materiale conduttore.
Nel caso invece di un sistema in corrente alternata trifase, per il quale vale che P = 3V I cos ϕ :
Vol = 3 A ⋅ l
[5.5]
p = 3⋅ R ⋅ I 2 = 3⋅ρ
l
P2
l
P2
l 2
⋅ I = 3⋅ρ ⋅
=ρ ⋅ 2
2
2
A 3 ⋅ V cos ϕ
A V cos 2 ϕ
A
[5.6]
se anche qui si ragiona a perdite prefissate p M :
Ci = β ⋅ 3 A ⋅ l = β ⋅ 3ρ
l 2P2
pM V 2 cos 2 ϕ
[5.7]
Come si nota, a parità di tensione, il rapporto tra il costo iniziale per tra il sistema trifase e quello in corrente
continua il rapporto è pari a 3 cos 2 ϕ , mostrando come il sistema in DC sia, sotto questo solo aspetto, molto
più conveniente.
Tuttavia il sistema DC presenta altri cosi, molto importanti, che sono quelli delle stazioni di conversione
AC/DC, con trasformatori dedicati, ponti raddrizzatori e filtri; per cui viene utilizzato solo su lunghe distanze
e, solitamente, tra sistemi che non presentano tra loro altri collegamenti in alternata.
Si noti infine che nelle formule per il sistema trifase si è utilizzata la tensione concatenata. Se si fosse
utilizzata la tensione di fase il vantaggio sarebbe stato reso in misura ancora più evidente; tuttavia per il
confronto tra i diversi sistemi è la tensione concatenata quella più significativa, in quanto è essa il riferimento
per dimensionare l'isolamento.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 8 di 53
5.2.2 - La Rete Elettrica Nazionale (RTN)
Il sistema di trasmissione dell'energia elettrica in alta tensione è prevalentemente costituito da linee aree in
AC, anche se negli ultimi anni alcune delle nuove linee a volte sono costruite con tratti in cavo, soprattutto in
prossimità dei centri abitati.
La rete di trasmissione italiana a 220 e 400 kV prevede fino a 700 nodi e oltre 1000 lati. Sono presenti in
essa anche brevi tratti in cavo, soprattutto per gli attraversamenti marini (cavi sottomarini). Per
attraversamenti marini di notevole lunghezza si opta solitamente per la trasmissione in c.c. con un solo filo: il
ritorno è via mare, grazie ad appositi elettrodi immersi in prossimità delle stazioni di partenza e di arrivo. In
questo modo, con un solo conduttore, il cavo è meno ingombrante e meno costoso da fabbricare (per i cavi i
costi non sono tanto del materiale conduttore, ma in grande misura dei rivestimenti isolanti e protettivi).
Come contropartita è necessario costruire due stazioni di conversione AC/DC, alla partenza e all'arrivo della
tratta sottomarina. In Italia molto importante sono i sistema SaCoI (Sardegna - Corsica - Italia) e SaPeI
(Sardegna - Penisola Italiana).
Nel SaCoI una linea in cavo sottomarino a ±200 kV DC attraversa il mare Tirreno dalla Toscana alla Corsica
(la Corsica è molto più vicina al continente della Sardegna), percorre la Corsica come linea aerea in c.c.,
attraversa il breve braccio di mare tra Corsica e Sardegna come cavo sottomarino in c.c., e finalmente arriva
sull'isola italiana permettendone l'interconnessione con il sistema continentale. Al tempo stesso anche la
Corsica può esserne alimentata, e la rete italiana fa così da tramite tra quella francese e la sua isola. La
portata è di 300 MW.
Nel SaPeI (più recente) la linea sottomarina è a ±500 kV DC e collega la Stazione di Latina direttamente alla
Sardegna. La portata di questo sistema arriverà a 1 GW a pieno regime.
Le stazioni di conversione AC/DC hanno un funzionamento basato su dispositivi elettronici di potenza.
La Sicilia è invece collegata in c.a. trifase al continente.
5.2.3 - I parametri elettrici delle linee
Le linee elettriche, siano esse in cavo o aeree, presentano, ai fini delle analisi impiantistiche, 4 parametri
fondamentali1, detti parametri distribuiti perché si presentano con un dato valore per unità di lunghezza.
Questi sono: la resistenza, l'induttanza, la capacità e la conduttanza, di cui generalmente si considerano i
valori chilometrici.
Resistenza e induttanza sono parametri tipo serie, dovuti rispettivamente all'effetto Joule e all'effetto di auto
e mutua induzione elettromagnetico. L'induttanza presenta un effetto mutuo, vale a dire che ognuna delle tre
linee del sistema trifase induce tensione sulle altre. Tuttavia, se il sistema presenta una simmetria triangolare
(per esempio: i tre fili disposti ai vertici di un triangolo equilatero), i valori delle mutue induttanze sono tutti
uguali; se il sistema è alimentato da una terna di correnti equilibrata si può quindi procedere come indicato
nel paragrafo 6.4, formule [6.61] e precedenti, ottenendo così una unica induttanza di linea. Se la geometria
del sistema non è simmetrica, si provvede a renderla tale almeno mediamente, scambiando di posto tra loro
i vari conduttori lungo la lunghezza della linea, in maniera che ciascuno occupi per tratti uguali tutte le tre
possibili posizioni. Questo metodo viene detto metodo di trasposizione dei conduttori.
La resistenza chilometrica è data da:
r =ρ
1km
A
[5.8]
mentre l'induttanza di linea è data da (si ricava da una laboriosa analisi degli effetti auto e mutuo induttivi):
l = 0.20 ⋅ ln
2D
+ 0.05 mH km
d
[5.9]
dove D è la distanza geometrica media tra i conduttori e d è il diametro di ciascun conduttore. Questa
formula è comunque un'espressione semplificata, anche se più che accettabile ai fini pratici nella maggior
parte dei casi. Da qui ovviamente si ottiene la reattanza chilometrica:
x = ω⋅l
1
[5.10]
i "parametri fondamentali" sono ovviamente più di 4 (dipende anche da cosa si intenda per "fondamentali"…). I 4 ora citati sono quelli
indispensabili per l'analisi dei flussi di potenza.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 9 di 53
Valori tipici dei parametri chilometrici serie per le linee aeree sono dell'ordine di 0.025 ÷ 0.100 Ω km per la
resistenza
r
e di 0.30 ÷ 0.40 Ω km (linee aeree) o 0.10 ÷ 0.15 Ω km (linee in cavo)per la reattanza x = ωl .
Capacità e conduttanza sono invece parametri di tipo derivato; vale a dire essi si presentano tra la linea e il
terreno. Sono dovute: la capacità al fatto che ogni conduttore presenta comunque effetti capacitivi
(condensatore cilindrico); la conduttanza ad una piccolissima conduzione attraverso l'aria, dovuta
sostanzialmente a fenomeni di tipo ionico (effetto corona). La conduttanza è comunque trascurabilissima.
Il valore della capacità chilometrica è dato (formula valida in condizioni di simmetria) da:
c=
0.024
μF km
ln (2 D d )
[5.11]
Valori tipici sono di capacità sono 10÷12 nF/km per le linee aeree e 150÷400 nF/km per le linee in cavo.
Questi parametri prendono il nome di parametri distribuiti proprio perché sono presenti in ogni tratto, anche
infinitesimo, della linea. Una rappresentazione corretta della linea prevedrebbe allora un circuito equivalente
composto dalla successione di un infinito numero di circuiti elementari, corrispondenti ciascuno ad un tratto
infinitesimo di linea, rappresentanti ciascuno una resistenza e una reattanza serie infinitesime e una
suscettanza e una conduttanza derivate anch'esse infinitesime: si avrebbero cioè dei rami derivati presenti in
ogni tratto infinitesimo di linea.
Se la lunghezza totale della linea non è eccessiva, essendo l'ammettenza dei parametri derivati di valore
molto più piccola (in p.u.) dell'induttanza dei parametri serie, si procede concentrando in due soli rami
derivati, uno all'inizio e uno alla fine della linea, il parallelo dei rami derivati distribuiti (in ogni ramo
concentrato si pone metà del totale). Un circuito siffatto è un poco impreciso rispetto alla realtà, ma
l'approssimazione è spesso ottima.
Se la linea è molto lunga, è opportuno invece scrivere un sistema di 2 equazioni differenziali che,
considerando le sequenza infinita di circuiti infinitesimi, leghino tra loro il valore della corrente e della
tensione in ogni punto della linea. In questo modo, integrando il sistema con almeno due condizioni al
contorno (per esempio tensione e corrente ad un estremo, oppure le tensioni ai due estremi, oppure le
correnti ai due estremi) è possibile scrivere le equazioni di trasferimento di un quadripolo perfettamente
equivalente all'intera linea, e quindi rappresentare tale quadripolo con un circuito equivalente a π (oppure a
Τ), ma con i valori dei parametri tale da renderlo esattamente equivalente. I valori esatti così calcolati non si
discostano molto, comunque, dai valori calcolati semplicemente concentrando i parametri distribuiti con una
semplice somma. Il sistema di equazioni differenziali, spesso trasformato in un'unica equazione di secondo
grado, prende il nome di equazione dei telegrafi.
Va notato, osservando anche le formule [5.8] e successive, che per le linee aeree il valore della reattanza è
solitamente molto più rilevante di quello della resistenza, mentre il valore della suscettanza capacitiva è
molto piccolo, fino ad essere quasi trascurabile.
Per le linee in cavo invece reattanza e resistenza presentano valori paragonabili, perché la reattanza è più
piccola, e la suscettanza capacitiva presenta valori rilevanti.
I calcoli sulle linee in cavo sono quindi più complessi perché su di essi non sono lecite molte
approssimazioni valide invece per le linee aeree.
5.2.4 - Le stazioni elettriche
Le linee elettriche di potenza, siano esse in cavo o aeree, convergono in complessi detti stazioni elettriche.
In questi complessi si realizza, oltre all'eventuale incontro di più linee differenti, anche la trasformazione della
tensione a diversi livelli e lo smistamento della potenza elettrica mediante la partenza di più linee di
distribuzione, in media tensione. Molto spesso sono presenti trasformatori AT/MT (alta tensione/media
tensione) con possibilità di regolazione a prese: possono cioè variare il numero di spire sul primario o sul
secondario in modo da rendere possibile, in qualche misura, una regolazione di tensione. Se per esempio la
tensione in AT arriva ad un livello inferiore a quello nominale, basta scegliere una presa di regolazione che
preveda un rapporto di trasformazione più elevato tra la media e l'alta tensione.
Nelle stazioni, inoltre, vengono posti gli apparecchi di manovra, vale a dire quei dispositivi preposti
all'apertura dei collegamenti con le linee stesse, o tra queste e il macchinario elettrico (trasformatori). A tali
dispositivi si dedicherà un paragrafo capitoli successivi.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 10 di 53
5.3 - La distribuzione dell'energia elettrica
Dalle stazioni inizia il sistema di distribuzione, solitamente realizzato in media tensione, MT.
Per MT si intendono tensioni comprese tra 1 e 33 kV. I valori più usati sono 6, 10, 15, 20 e 30 kV. Le linee in
MT sono quasi tutte in cavo, perché attraversano zone ad alta densità di urbanizzazione (soprattutto nelle
città); coprono distanze di pochi km (fino a 10÷20 km; oltre le perdite sono troppo rilevanti), ma non mancano
le linee aeree, per esempio per la distribuzione rurale.
Solitamente il sistema di distribuzione è di tipo radiale, cioè dalla stazione si diramano, a raggiera, diverse
linee MT che coprono ciascuna una sezione di territorio.
A volte si hanno sistemi di distribuzione esercìti ad anello, nei quali dalla stazione escono coppie di linee
MT che poi si incontrano alle loro estremità, formando così un anello. In questo modo in caso di guasto in un
punto del sistema l'alimentazione è garantita dall'altra linea. Il punto di incontro a volte presenta un
interruttore di collegamento, che è normalmente aperto ("sistema ad anello esercìto in radiale" o "anello
aperto") e che viene richiuso in caso di guasto come appena descritto.
Molto rari invece sono i sistemi di distribuzione magliata, in cui i vari rami MT presentano molteplici
collegamenti l'uno con l'altro. In caso di guasto questi sistemi sono molto affidabili in quanto garantiscono
quasi sempre la continuità del servizio, essendo sempre disponibile un qualche percorso; ma sono più
costosi da realizzare e difficili da gestire, perché è difficile determinare a priori quale strada scelgano i flussi
di potenza (c'è sempre il rischio che qualche tratto di linea sia sovraccaricata) e, soprattutto, da proteggere,
perché si perde l'identificabilità di "guasto a monte" e "guasto a valle", che è invece immediata nei sistemi
radiali e che agevola e semplifica molto il progetto e l'esercizio del sistema di protezione.
Il sistema MT alimenta direttamente solo i carichi più grandi, ovvero i grossi motori industriali. La maggior
parte dei carichi sono invece in bassa tensione, BT, cioè con valori fino a 1000 V (ma solitamente a 400 V o,
più raramente, a 500 V e a 690 V); esso alimenta invece le cabine secondarie, dove un trasformatore
MT/BT effettua l'ultima trasformazione. Da qui si dipartono le linee BT che, con percorsi di poche decine, al
più pochissime centinaia di metri, arrivano all'utente utilizzatore. Le linee BT si dipartono dalle cabine in
pratica sempre in configurazione radiale.
Molti utilizzi sono di tipo monofase. Per questi solitamente si fornisce una delle tre fasi e il neutro.
Suddividendo i vari utenti monofasi in ugual misura tra le tre fasi disponibili solitamente si ottiene una carico
equilibrato.
Le stazioni sono generalmente poste ai margini delle città, e presentano i dispositivi all'aria aperta: linee
aeree in arrivo, sbarre di alta tensione a cui si collegano gli apparecchi di manovra in AT, trasformatori
AT/MT, apparecchi di manovra in MT, sbarre di media tensione, linee MT in partenza, solitamente subito
interrate. L'unico edificio contiene i quadri MT e la sede degli operatori, dove sono riportati i terminali di
partenza di tutti i servocomandi e di arrivo degli apparecchi di misura (sala controllo).
Le cabine secondarie sono invece spesso ricavate in piccoli vani entro edifici di privati (sono riconoscibili
dalle porte metalliche con i simboli di pericolo elettrico e le avvertenze in caso di incendio), e hanno un
volume di pochi metri cubi.
5.4 - L'utilizzo dell'energia elettrica
Non occorre spendere molte parole per evidenziare il largo uso dell'energia elettrica. Tutta la nostra vita
ormai dipende da tale forma di energia, dagli utilizzi domestici (l'illuminazione, elettrodomestici), a quelli degli
uffici (computer, stampanti) a quelli industriali. L'energia elettrica è talmente diffusa e abituale che non ci
rendiamo più neppure conto di quanto essa renda la vita comoda e di come saremmo invece ributtati indietro
nella qualità della vita se essa dovesse mancare.
Concentreremo questo corso sugli aspetti impiantistici legati agli utilizzi industriali.
Nell'industrial i principali utilizzi dell'energia elettrica sono dovuti:
-
alla necessità di forza motrice (meccanica), soprattutto per azionare: pompe (di fluidi liquidi),
compressori (di fluidi gassosi), ventilatori, elevatori, nastri trasportatori e macchine operatrici; questo
si ottiene soprattutto mediante motori, che sono solitamente motori asincroni DOL (Direct-On-Line)
ovvero alimentati direttamente dalla rete elettrica in AC. Negli ultimi anni hanno avuto ed hanno molta
diffusione i motori sotto VSD (o VFD), Variable Speed (o Frequency) Drives: si tratta di dispositivi di
elettronica di potenza alimentati dalla rete AC a 50 Hz, ma in grado di produrre tensione e corrente ad
una frequenza diversa da quella di rete, regolabile liberamente, assieme alla tensione, entro un range
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 11 di 53
abbastanza vasto (p.es. da 10 a 80 Hz). I motori utilizzati sono ancora di tipo asincrono, ma con la
possibilità di regolarne la velocità di funzionamento, in base alle esigenze del processo.
Le potenze massime raggiungibili da un singolo motore sono, per applicazioni tradizionali, dell'ordine di
qualche MW per motori in MT e di parecchie decine o anche poche centinaia di kW per motori in BT.
Motori MT con potenze di decine di MW sono costruibili per applicazioni speciali.
-
alla necessità di produrre calore con grande potenza, per esempio mediante forni ad induzione e forni
ad arco. Grazie all'alimentazione elettrica è possibile raggiungere temperature molto elevate, adeguate
per esempio alla fusione di materiali ferrosi o altri metalli.
Gli stabilimenti industriali del settore sono solitamente grandi consumatori di energia, con potenze
installate di parecchie decine, se non centinaia, di MW.
-
alla necessità di avere grandissime correnti ma con basso voltaggio in corrente continua, per
applicazioni elettrochimiche: questo si ha soprattutto in alcune industrie metallurgiche e chimiche.
Anche in questo caso le potenze possono essere molto elevate.
-
alle necessità minori o "ausiliarie": illuminazione, scaldiglie, conversione AC/DC per alimentazione di
dispositivi elettronici.
Il "carico" industriale è quindi un mix di motori DOL, motori sotto VSD, altri dispositivi di conversione AC/DC
e carichi diretti di tipo "impedenza" (es. le scaldiglie sono resistenze in derivazione dalla rete AC). A parità di
dispositivi inseriti, l'assorbimento di potenza attiva e reattiva dipende in varia misura dalla tensione.
Per esempio, per un carico di tipo "impedenza" la potenza assorbita dipende quadraticamente dalla
tensione, mentre per un motore DOL la potenza attiva risente pochissimo delle variazioni di tensione, quella
reattiva in misura maggiore. In generale sarà:
α
⎛V ⎞
P = Pn ⋅ ⎜⎜ ⎟⎟ ;
⎝ Vn ⎠
⎛V ⎞
Q = Qn ⋅ ⎜⎜ ⎟⎟
⎝ Vn ⎠
β
[5.12]
dove le grandezze con pedice "n" indicano i valori nominali della tensione e delle potenze, mentre α e β
sono esponenti che indicano la dipendenza dalla tensione, e che sono solitamente compresi tra 0 e 2.
5.5 - La regolazione di tensione e di frequenza / potenza
I generatori sincroni sono macchine provviste di regolatori di tensione e di frequenza / potenza. I primi
agiscono sull'eccitazione, i secondi sui motori primi (turbine). Occorre notare che, ai fini del trasporto di
potenza sulle reti elettriche, una differenza di tensione tra gli estremi di una linea o tra il primario e il
secondario di un trasformatore produce i seguenti effetti:
a)
una differenza nei moduli corrisponde ad un transito di potenza reattiva
b)
una differenza nelle fasi corrisponde ad un transito di potenza attiva
Queste affermazioni sono valide, sia pure in modo approssimato, nell'ipotesi che il lato tra i due nodi abbia
impedenza prevalentemente reattiva induttiva. Si supponga per esempio che (in per unità) sia Z = j ⋅ 0.10 ;
allora se:
a)
V1 = 1.0 ⋅ e j 0
V2 = 0.9 ⋅ e j 0
si avrà:
I12 = (V1 − V2 ) Z = 0.1 j ⋅ 0.1 = − j ⋅1.0
A12 = V1 ⋅ I12* = j ⋅1.0
quindi si ha un flusso di potenza reattiva dal nodo a tensione maggiore al nodo a tensione minore.
b)
V1 = 1.0 ⋅ e j 0.1 V2 = 1.0 ⋅ e j 0.0
si avrà:
I12 = (V1 − V2 ) Z = (− 0.005 + j ⋅ 0.100 ) j ⋅ 0.1 = 1.00 + j ⋅ 0.05
A12 = V1 ⋅ I12* = 1.00 − j ⋅ 0.05
quindi si ha un flusso di potenza attiva dal nodo a fase maggiore al nodo a fase minore (oltre ad un
minimo flusso di reattivo).
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 12 di 53
La presenza di una termine resistivo in serie a quello induttivo sull'impedenza del lato comporterebbe delle
variazioni rispetto agli esempi indicati, ma solitamente, per le linee di grande potenza, la resistenza è molto
piccola rispetto alla reattanza.
Da quanto visto si evince che nei sistemi elettrici per l'energia i transiti di reattivo sono strettamente
legati ai moduli delle tensioni e i transiti di attivo alle fasi delle tensioni. In particolare, se il motore
primo di un alternatore produce un esubero di potenza rispetto a quanta ne assorbe la rete, la macchina
avrà un eccesso di coppia e pertanto tenderà ad accelerare. In questo modo la fase della tensione ai
morsetti dell'alternatore aumenterà (perché il rotore andrà un po' più in fretta del sincronismo di rete),
provocando un maggior transito di potenza verso la rete. Così potenza meccanica e potenza elettrica
torneranno ad essere uguali, ottenendo così una nuova situazione di equilibrio in cui non si presenta più
accelerazione angolare e la macchina torna perfettamente in sincronismo (analogamente se ci fosse stato
un deficit di potenza meccanica).
In questo modo, però, dopo l'assestamento così descritto il generatore torna ad erogare la medesima
potenza elettrica, e questo potrebbe essere non adeguato alle esigenze della rete. Se per esempio la fase
della tensione ai morsetti del gruppo si era spostata all'indietro, ovvero se la frequenza di rete era in qualche
misura diminuita, questo significa che complessivamente nella rete il bilancio:
potenza generata = potenza assorbita dai carichi + perdite in rete
non era più soddisfatto: se la frequenza scende, significa che la potenza generata non è più sufficiente
(perché si è inserito qualche nuovo carico, oppure perché si è perduto qualche generatore).
I regolatori di f/P (frequenza/potenza) svolgono allora un ruolo primario di fronte a tali fenomeni. Se un
generatore tende ad accelerare (inseguendo la rete), significa che esiste un surplus di potenza generata
rispetto alla richiesta di rete; se tende a decelerare (inseguendo la rete), significa che esiste un deficit di
potenza generata rispetto alla richiesta di rete.
Nel primo caso il regolatore di f/P agirà sulle valvole della turbina e ridurrà la produzione; nel secondo,
eseguirà l'operazione opposta. Tutto questo, ovviamente, entro i limiti di producibilità della turbina e con i
tempi necessari: i servomotori delle valvole richiedono tempo per agire, il processo della turbina ha le sue
costanti di tempo, vi sono talvolta ulteriori limiti "artificiali" per evitare alla macchina gradienti termici troppo
pesanti.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 13 di 53
6 - I Sistemi Trifase
6.1 - Generalità
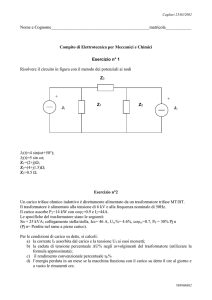
Si consideri la seguente rete elettrica:
E1
Z1
E2
Z2
E3
Z3
G
figura 6.1
dove i tre generatori erogano le tensioni:
E1 = E ⋅ e jδ
E2 = E ⋅ e j (δ − 2 π 3 )
E3 = E ⋅ e
[6.1]
+ j (δ + 2 π 3 )
e il centro stella G del sistema di generatori si trova a tensione nulla.
Se il carico indicato è composto da una stella di rami passivi di ugual impedenza Z S , si avrà, trascurando le
impedenze delle linee di trasmissione:
E1 − V0 = Z S ⋅ I1
E2 − V0 = Z S ⋅ I 2
[6.2]
E3 − V0 = Z S ⋅ I 3
dove V0 è la tensione del centro stella del carico. Se tale centro stella è isolato, cioè non presenta altri
collegamenti se non i tre rami della stella, la sua tensione è per ora indeterminata, ma si può scrivere
l'equazione di Kirchhoff per tale nodo:
I1 + I 2 + I 3 = 0
[6.3]
che unita alle [6.2] forma un sistema di 4 equazioni in 4 incognite (le 3 correnti e la tensione del centro
stella). Dalle [6.2]:
Ik =
Ek − V0
ZS
[6.4]
quindi dalla [6.3] utilizzando questa relazione:
E1 − V0 E2 − V0 E3 − V0
+
+
=0
ZS
ZS
ZS
[6.5]
da cui:
V0 =
E1 + E2 + E3 E j 0 − j 2 π 3 + j 2 π 3 E ⎛⎜
1
3 1
3 ⎞⎟
= ⋅ e +e
+e
= ⋅ ⎜1 + j 0 − − j
− +j
=0
3
3
3 ⎝
2
2 2
2 ⎟⎠
(
)
risultato peraltro prevedibile, vista la simmetria della situazione.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
[6.6]
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 14 di 53
Quindi:
Ik =
Ek
ZS
k = 1,2,3
[6.7]
Dalla [6.3]:
I1 = − I 2 − I 3
[6.8]
Si nota allora che ciascuna linea può essere vista come la linea di andata di un sistema di alimentazione
elettrica, avente come ritorno le altre due linee. Questo vale per ognuna della tre linee: ciascuna assolve al
tempo stesso alla funzione di andata per se stessa e di ritorno per le altre.
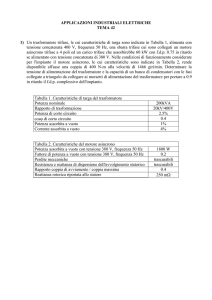
Si noti che lo stesso si sarebbe ottenuto anche se anziché una stella si fosse trovato un triangolo di
impedenze, purché anche queste fossero state tutte uguali tra di loro:
ZS
ZT
figura 6.2
Procedendo alla trasformazione triangolo stella si avrebbe, dalle formule [2.22]:
ZS =
ZT ⋅ ZT
Z
= T
3
ZT + ZT + ZT
[6.9]
Analogamente, anche il lato dei generatori potrebbe essere costituito da una terna di generatori disposta a
stella anziché a triangolo:
figura 6.3
Tutto quanto appena visto è un caso particolare di sistema trifase. Vedremo presto che i sistemi trifase
possono essere definiti tali anche se non presentano le caratteristiche di simmetria e di equilibrio della
situazione vista. Prima di questo, vediamo alcune proprietà di questo sistema.
In primo luogo, si può definire sistema trifase qualunque sistema elettrico che presenti trasmissione
dell'energia per mezzo di linee elettriche a tre fili (si vedrà in seguito che nei sistemi trifasi è ammessa
anche la presenza di un quarto filo, con una funzione particolare). I sistemi trifase non sono quindi che casi
particolari delle normali reti elettriche, e si studieranno quindi con gli stessi metodi; si dedica però loro una
trattazione particolare perché sono diffusissimi: in pratica tutta la produzione, il trasporto e la distribuzione
dell'energia elettrica avvengono mediante sistemi trifase, e solo l'utilizzazione finale civile è monofase (quella
industriale è trifase).
Si definiscono tensioni di fase le tensioni indicate nell'esempio come E1 ,E2 ,E3 , pari alle tensioni che si
presentano tra ogni linea e il centro stella, preso come riferimento. Se però non si ha una stella, tali tensioni
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 15 di 53
non possono essere definite, o meglio per definirle occorre effettuare un equivalente a stella della terna a
triangolo, oppure considerare un punto esterno (per esempio la terra) come riferimento di tensione. Possono
invece essere sempre definite le tensioni concatenate, pari alle tensioni tra linea e linea:
V12 = E1 − E2
V23 = E2 − E3
[6.10]
V31 = E3 − E1
dove le tensioni Ek sono le tensioni di fase, misurate tra ogni linea e un riferimento (che potrebbe essere
appunto la terra o - se esiste - il centro stella).
Si noti una importante proprietà dei sistemi trifase:
V12 + V23 + V31 = 0
[6.11]
Si noti anche che quando le tensioni di fase sono tutte uguali in modulo e sfasate tra loro di 120° gradi
elettrici, anche le tensioni concatenate sono uguali in modulo e sfasate tra loro di 120°, come si vede bene
sia in forma analitica sia considerando graficamente le tensioni. Dal punto di vista grafico, qualunque sia il
loro valore, le tensioni di fase formano comunque una stella e quelle concatenate un triangolo avente per
vertici gli estremi della stella.
3
V3 1
G
V2 3
1
V1 2
2
figura 6.4
Quando si realizza in generale che:
V12 = V23 = V31 = V
[6.12]
il fatto che i tre moduli siano uguali implica che il triangolo sia equilatero e quindi le fasi di tali tensioni
differiscano l'una dall'altra di 120°; di conseguenza anche le tensioni di fase, se sono definibili, saranno tra
loro uguali in valore efficace e sfasate di 120°, purché il centro stella si trovi a tensione nulla; si nota che
vale:
V = 3E
[6.13]
In questo caso si dice allora che il sistema delle tensioni è simmetrico. Generalmente, quando si indica la
tensione nominale di un sistema trifase, si utilizza la tensione concatenata e non quella di fase. Per esempio
la distribuzione a bassa tensione per uso civile o commerciale trifase è di 380 o 400 V, e tale valore indica la
tensione concatenata, a cui corrisponde una tensione di fase di 220 o 230 V [6.13]. Nelle nostre case
riceviamo una tensione di fase.
Si definiscono correnti di linea le correnti indicate nell'esempio come I1 ,I 2 ,I 3 . Se il centro stella è isolato
vale:
I1 + I 2 + I 3 = 0
[6.14]
questa proprietà è duale della [6.11]. Se vale che:
I1 = I 2 = I 3 = I
Versione 1.00 - ottobre 2010
[6.15]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 16 di 53
allora combinando questa relazione con la [6.14] si nota che le tre correnti dovranno essere sfasate tra loro
di 120° elettrici; in questo caso si dice che il sistema delle correnti è equilibrato.
Spesso viene usato il coefficiente:
1
3
1
3
α = e j 2π 3 = − + j
da cui: α 2 = e j 4 π 3 = e − j 2 π 3 = − − j
2
2
2
2
[6.16]
che presenta modulo unitario. Moltiplicato per una grandezza fasoriale comporta solo lo sfasamento della
stessa di 120°
Nei sistemi simmetrici si hanno quindi due possibilità:
E1 = E ⋅ e jδ
E1 = E ⋅ e jδ
E2 = α 2 ⋅ E1
oppure
E3 = α ⋅ E1
E2 = α ⋅ E1
[6.17]
E3 = α 2 ⋅ E1
Nel primo caso la tensione 2 è in ritardo di 120° rispetto alla tensione 1 e la tensione 3 è in ritardo di 120°
rispetto alla tensione 2, e si parla di terna o sequenza diretta. Nel secondo caso le stesse tensioni sono
invece in anticipo, e si parla di terna o sequenza inversa.
Inoltre poiché:
Ik =
Ek
ZS
k = 1,2,3
[6.18]
allora anche:
I1 = I ⋅ e j (δ − ϕ )
I 2 = α 2 ⋅ I1
I1 = I ⋅ e j (δ − ϕ )
oppure
I 3 = α ⋅ I1
I 2 = α ⋅ I1
[6.19]
I 3 = α 2 ⋅ I1
Se la terna delle tensioni di fase è diretta, lo è anche quella delle tensioni concatenate, e viceversa, e lo è
anche quella delle correnti di linea; lo stesso per le terne inverse.
6.2 - I vantaggi del sistema trifase
Il sistema trifase presenta parecchi vantaggi in confronto al sistema monofase.
6.2.1 - Campo magnetico rotante
Un primo vantaggio risulterà più chiaro nello studio delle macchine elettriche rotanti: il sistema trifase, grazie
alle tre grandezza sfasate di 120° tra loro, permetterà agevolmente di produrre un campo magnetico rotante,
fondamentale nelle macchine sincrona e asincrona.
6.2.2 - Ottimizzazione della trasmissione dell'energia
Il secondo vantaggio consiste nel fatto che ciascuna delle tre linee fa al tempo stesso da andata per se
stessa e da ritorno per le altre due. In un sistema trifase la potenza elettrica e pari alla somma delle potenza
sulle singole linee; pertanto vale:
A = E1 ⋅ I1* + E2 ⋅ I 2* + E3 ⋅ I 3*
[6.20]
se il sistema è simmetrico ed equilibrato, lo sfasamento tra tensione e corrente è lo stesso per ognuna delle
3 linee, quindi:
A = 3E1 ⋅ I1* = 3E I ⋅ (cos ϕ + j sin ϕ)
[6.21]
se le tre linee di trasmissione presentano ciascuna una resistenza R , allora le perdite in linea valgono:
Pd = 3R I 2
[6.22]
e il rapporto tra la potenza dissipata e quella trasportata vale:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
pd =
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
Pd
RI 2
3R I 2
=
=
P 3E I cos ϕ E I cos ϕ
p. 17 di 53
[6.23]
in un sistema monofase si avrebbe invece:
A = E ⋅ I1 = E I ⋅ (cos ϕ + j sin ϕ)
[6.24]
per la trasmissione occorre una linea di andata e una di ritorno, e ciascuna presenta una resistenza
allora le perdite in linea valgono:
Pd = 2 R I 2
R,
[6.25]
e il rapporto tra la potenza dissipata e quella trasportata vale:
pd =
Pd
2RI 2
2RI 2
=
=
P E I cos ϕ E I cos ϕ
[6.26]
che è un valore doppio rispetto a quello del sistema trifase. Quindi il sistema trifase ha un miglior rendimento
rispetto al monofase. Si possono considerare le cose a pari tensione nominale e a pari potenza trasportata.
Nel sistema trifase:
P = 3EI cos ϕ = 3VI cos ϕ ⇒
I=
P
[6.27]
3V cos ϕ
quindi:
Pd = 3R I 2 =
RP 2
3RP 2
=
3V 2 cos 2 ϕ V 2 cos 2 ϕ
[6.28]
Nel sistema monofase:
P = VI cos ϕ =VI cos ϕ ⇒ I =
P
V cos ϕ
[6.29]
quindi:
Pd = 2 R I 2 =
2 RP 2
2 RP 2
=
V 2 cos 2 ϕ V 2 cos 2 ϕ
[6.30]
Se si vuole tenere conto del costo dei conduttori, questo è proporzionale al peso e quindi al volume dei
conduttori.
Nel sistema trifase:
C = k ⋅ 3l S
[6.31]
volendo realizzare un sistema monofase con pari costo di materiale, e quindi con pari peso e volume:
C = k ⋅ 2l S m
⇒ Sm =
3
St
2
[6.32]
la sezione sarà del 50% maggiore perché il monofase ha solo due fili. Allora le resistenze:
Rt = ρ
l
l
2
; Rm = ρ
= Rt
St
Sm 3
[6.33]
e le perdite:
Pdm =
2 Rm P 2
;
V 2 cos 2 ϕ
Pdt =
Rt P 2
3 Rm P 2
3
=
= Pdm
2
2
2
2
V cos ϕ 2 V cos ϕ 4
[6.34]
anche a parità di peso dei conduttori e quindi di costo degli impianti le perdite sono minori nel sistema trifase
rispetto al sistema monofase.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 18 di 53
Volendo invece realizzare un sistema trifase con le stesse perdite di uno monofase, a parità di tensione
nominale e di potenza trasmessa:
Pdt =
Rt P 2
;
V cos 2 ϕ
Pdm =
2
2 Rm P 2
V 2 cos 2 ϕ
[6.35]
quindi per eguagliare le perdite:
Rt = 2 Rm
⇒ St =
1
3
3
3
S m ; Ct = k ⋅ 3l S t = k ⋅ l S m = k ⋅ 2l S m = Cm
2
2
4
4
[6.36]
Il costo dell'impianto è quindi inferiore nel sistema trifase rispetto al sistema monofase.
Con il trifase quindi si può: o spendere la stessa somma per l'impianto e risparmiare sull'esercizio, oppure
prevedere le stesse perdite in esercizio ma spendere meno per l'impianto iniziale, o infine scegliere una
soluzione intermedia fra queste, secondo il calcolo di miglior convenienza economica. Per effettuare
correttamente il calcolo dei costi occorre però tenere conto non solo del peso dei conduttori, ma anche del
numero di supporti isolanti (se linea aerea) o dei rivestimenti isolanti (se linea in cavo) e della installazione
dei conduttori stessi. Tutti questi costi sono maggiore nel caso trifase; ma nonostante questo esso risulta in
generale più conveniente.
6.2.3 - Potenza istantanea complessiva senza componenti oscillatorie
Un terzo vantaggio del trifase (simmetrico ed equilibrato) è che la potenza elettrica istantanea complessiva è
costante. In un sistema monofase:
I = I ⋅ e j (δ − ϕ ) [6.37]
E = E ⋅ e jδ ;
da cui:
e(t ) = 2 ⋅ E ⋅ cos(ωt + δ )
[6.38]
i (t ) = 2 ⋅ I ⋅ cos(ωt + δ − ϕ) = 2 ⋅ I ⋅ (cos ϕ cos(ωt + δ ) + sin ϕ sin (ωt + δ ))
quindi:
(
)
p(t ) = 2 EI ⋅ cos ϕ cos 2 (ωt + δ ) + sin ϕ sin (ωt + δ ) cos(ωt + δ )
[6.39]
Il termine
2 EI ⋅ sin ϕ sin (ωt + δ ) cos(ωt + δ ) = EI ⋅ sin ϕ sin (2ωt + 2δ )
[6.40]
è il termine corrispondente alla potenza reattiva, che istante per istante indica quanta potenza viene
accumulata o ceduta dai condensatori e dagli induttori: corrisponde al prodotto della tensione per la
componente della corrente in quadratura con la tensione stessa.
Il termine:
2 EI ⋅ cos ϕ cos 2 (ωt + δ ) = EI ⋅ cos ϕ ⋅ (1 + cos(2ωt + 2δ ))
[6.41]
è il termine che darà origine, integrato nel tempo, alla potenza attiva: corrisponde al prodotto della tensione
per la componente della corrente in fase con la tensione stessa. Come si vede presenta una componente
costante e una oscillatoria, con frequenza doppia di quella del sistema.
Nel sistema trifase si avrà invece:
e1 (t ) = 2 ⋅ E ⋅ cos(ωt + δ )
e2 (t ) = 2 ⋅ E ⋅ cos(ωt + δ − 2π 3)
[6.42]
e3 (t ) = 2 ⋅ E ⋅ cos(ωt + δ + 2π 3)
i1 (t ) = 2 ⋅ I ⋅ cos(ωt + δ − ϕ) = 2 ⋅ I ⋅ (cos ϕ cos(ωt + δ) + sin ϕ sin(ωt + δ))
i2 (t ) = 2 ⋅ I ⋅ cos(ωt + δ − 2π 3 − ϕ) = 2 ⋅ I ⋅ (cos ϕ cos(ωt + δ − 2π 3) + sin ϕ sin(ωt + δ − 2π 3))
i3 (t ) = 2 ⋅ I ⋅ cos(ωt + δ + 2π 3 − ϕ) = 2 ⋅ I ⋅ (cos ϕ cos(ωt + δ + 2π 3) + sin ϕ sin(ωt + δ + 2π 3))
quindi la potenza istantanea vale:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
[6.43]
G. Pasini
Corso di Impianti Elettrici Industriali
[
1B - Approfondimenti di elettrotecnica
p. 19 di 53
]
p(t ) = 2EI ⋅ cos ϕ ⋅ cos2 (ωt + δ) + cos2 (ωt + δ − 2π 3) + cos2 (ωt + δ + 2π 3) +
+ 2EI ⋅ sin ϕ ⋅ [+ cos(ωt + δ)sin(ωt + δ) + cos(ωt + δ − 2π 3) sin(ωt + δ − 2π 3) +
+ cos(ωt + δ + 2π 3) sin(ωt + δ + 2π 3)]
[6.44]
il termine moltiplicato da sin ϕ è il termine dovuto al prodotto delle tensioni per le componenti di corrente in
quadratura, e corrisponde alla potenza reattiva. Il termine moltiplicato per cos ϕ , invece, darà origine,
integrato nel tempo, alla potenza attiva. Esso vale:
EI ⋅ [1 + cos(2ωt + 2δ ) + 1 + cos(2ωt + 2δ − 4π 3) + cos(2ωt + 2δ + 4π 3)] = 3EI
[6.45]
e come si vede, istante per istante, le tre componenti oscillanti si annullano a vicenda. In ciascun singolo
componente della stella o del triangolo che compone il carico l'assorbimento di attivo presenta il termine
costante più il termine oscillatorio; globalmente per il sistema trifase i termini oscillatori si annullano. Questo
può essere importante per esempio per le macchine elettriche rotanti, perché questo garantisce un valore di
potenza e di coppia meccanica all'albero privo di oscillazioni.
6.3 - I Carichi nei Sistemi Trifase
Si supponga che un dato carico trifase stia assorbendo una terna di correnti:
I1 , I 2 , I 3
[6.46]
in generale anche non equilibrate, a fronte di una terna di tensioni concatenate:
V12 ,V23 ,V31
[6.47]
in generale anche non simmetriche.
Si nota che con tale formulazione non è possibile calcolare la potenza assorbita dal sistema, data dalla
formula [6.20] che prevede l'utilizzo delle tensioni di fase.
Se si volessero ottenere, dalle tensioni concatenate, le tensioni di fase [6.10]:
V12 = E1 − E2
V23 = E2 − E3
[6.48]
V31 = E3 − E1
si nota subito che il sistema [6.10] presenta 3 incognite ma solo 2 equazioni, perché le 3 equazioni non sono
tra loro indipendenti, dato che vale [6.11]:
V12 + V23 + V31 = 0
[6.49]
e che la somma delle tre equazioni porta ad avere anche il secondo membro nullo.
Quindi questo sistema presenta 1 grado di libertà (in campo complesso, quindi 2 in campo reale), quindi ∞1
soluzioni in campo complesso, ∞ 2 soluzioni in campo reale: occorre scegliere un valore per una delle tre
tensioni di fase, e solo così le altre saranno fissate. Questo corrisponde al fatto che, a priori, non è noto dove
si trovi il centro stella nel piano fasoriale, a meno di non conoscere il valore della sua tensione per altra via.
Così pure, volendo identificare, a partire dai valori delle tensioni concatenate e delle correnti, il valore delle
impedenze del carico, a stella o anche a triangolo, si incontra un problema analogo. Per esempio, per le
impedenze a stella:
V12 = Z1 ⋅ I1 − Z 2 ⋅ I 2
V23 = Z 2 ⋅ I 2 − Z 3 ⋅ I 3
[6.50]
V31 = Z 3 ⋅ I 3 − Z1 ⋅ I1
Anche in questo caso le tre equazioni non sono indipendenti, ma ciascuna dipende dalle altre due; ancora
una volta occorre o fissare il valore di una delle impedenze, o conoscere il valore del centro stella.
Si supponga allora di fissare arbitrariamente un centro stella G di tensione EG . La potenza assorbita vale
allora, con questo riferimento:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
A = E1 ⋅ I1* + E2 ⋅ I 2* + E3 ⋅ I 3*
p. 20 di 53
[6.51]
Si consideri anche un altro centro stella G′ , di tensione EG ′ , diversa dalla precedente. Rispetto a questo
nuovo centro stella si ha una nuova terna di tensioni di fase, legate alle precedenti dalla relazione:
Ek′ = Ek + EGG′
k = 1,2,3
[6.52]
e la potenza con queste nuove tensioni:
A ′ = E1′ ⋅ I1* + E2′ ⋅ I 2* + E3′ ⋅ I 3* = (E1 + EGG′ ) ⋅ I1* + (E2 + EGG′ ) ⋅ I 2* + (E3 + EGG′ ) ⋅ I 3* =
(
)
= E1 ⋅ I1* + E2 ⋅ I 2* + E3 ⋅ I 3* + EGG′ ⋅ I1* + I 2* + I 3* = A + EGG′ ⋅ 0 = A
[6.53]
come si può notare, la potenza non dipende (come è giusto che sia) dalla posizione del centro stella nel
piano fasoriale. Qualunque sia il centro stella scelto, si ottiene lo stesso valore di potenza, che è quello
corretto.
Quindi, qualunque sia la scelta che viene fatta per il centro stella, si ottiene una stella equivalente al carico
sia per quanto riguarda i valori tensione/corrente sia per quanto riguarda le potenze.
6.4 - Sistemi trifase simmetrici ed equilibrati
Per questi sistemi si è già visto come l'espressione della potenza possa essere data da:
A = E1 ⋅ I1* + E2 ⋅ I 2* + E3 ⋅ I 3* = 3E1 ⋅ I1 = 3E2 ⋅ I 2 = 3E3 ⋅ I 3 = 3EI ⋅ (cos ϕ + j sin ϕ )
[6.54]
cioè la potenza totale sia 3 volte la potenza di ogni singola fase.
Vale anche:
A = 3VI ⋅ (cos ϕ + j sin ϕ)
[6.55]
dove V è il valore efficace della tensione concatenata, ma l'angolo ϕ è sempre lo sfasamento tra la corrente
e la tensione di fase.
Può essere interessante notare come si comporta un sistema trifase in presenza di mutui accoppiamenti tra
le 3 fasi. Per un sistema trifase generico può essere:
E1 = R1 ⋅ I1 + jωL11 ⋅ I1 + jωM 12 ⋅ I 2 + jωM 13 ⋅ I 3
E2 = R2 ⋅ I 2 + jωM 21 ⋅ I1 + jωL22 ⋅ I 2 + jωM 23 ⋅ I 3
[6.56]
E3 = R3 ⋅ I 3 + jωM 31 ⋅ I1 + jωM 32 ⋅ I 2 + jωL33 ⋅ I 3
Le mutue induttanze, come è noto, sono simmetriche (vedi cap. 3), ovvero M ij = M ji . Se poi si verifica che:
M 12 = M 21 = M 13 = M 31 = M 23 = M 32 = M S
[6.57]
e se il sistema delle correnti è equilibrato, ricordando che:
α2 +α = −
1
3 1
3
−
− +
= −1
2 2 2 2
[6.58]
allora vale:
E1 = R1 ⋅ I1 + jωL11 ⋅ I1 + jωM S ⋅ α 2 ⋅ I1 + jωM S ⋅ α ⋅ I1 = (R1 + jω(L11 − M S )) ⋅ I1
E2 = R2 ⋅ I 2 + jωM S ⋅ α ⋅ I 2 + jωL22 ⋅ I 2 + jωM S ⋅ α 2 ⋅ I 2 = (R2 + jω(L22 − M S )) ⋅ I 2
[6.59]
E3 = R3 ⋅ I 3 + jωM S ⋅ α ⋅ I 3 + jωM S ⋅ α ⋅ I 3 + jωL33 ⋅ I 3 = (R3 + jω(L33 − M S )) ⋅ I 3
2
infine, se:
L11 = L22 = L33 = LS
[6.60]
allora definendo:
L = LS − M S
[6.61]
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
e se anche le resistenze sono tutte uguali, pari a
E k = ( R + j ωL ) ⋅ I k
1B - Approfondimenti di elettrotecnica
p. 21 di 53
R:
k = 1,2,3
[6.62]
In questa formula non appare più alcun accoppiamento tra le varie fasi. Basta pertanto conoscere cosa
succede su una fase sola mediante l'equazione [6.62], ed essendo il sistema simmetrico ed equilibrato i
valori sulle altre fasi saranno solo sfasati di 120° in anticipo o in ritardo.
Quindi:
i sistemi trifase simmetrici ed equilibrati, se presentano gli stessi parametri circuitali su
ogni fase e tra ogni fase e le altre, possono essere rappresentati con un equivalente di una
sola fase (disaccoppiato), dove il valore dell'induttanza equivalente è dato dalla [6.61].
Si parla in questo caso di rappresentazione monofase o monofilare del sistema trifase. Essa è valida per le
tensioni di fase e le correnti di fase, ma occorre ricordare che la potenza totale è pari a 3 volte la potenza di
una singola fase, quindi di un singolo circuito.
Nota:
occorre fare attenzione dal punto di vista concettuale. Il mutuo accoppiamento tra le fasi
fisicamente esiste sempre; nella formula scompare, solo come conseguenza della simmetria del
sistema e dell'equilibrio delle correnti. A fronte di una terna di correnti qualunque, esso sarebbe
nuovamente ben visibile in modo esplicito.
6.5 - Sistemi trifase con neutro
Nei sistemi trifase è frequente l'adozione di un quarto filo, generalmente privo di generatori e di carichi in
serie, detto filo di neutro o, semplicemente, neutro, collegato dal centro stella del generatore al centro stella
del carico. A volte si effettua semplicemente la messa a terra del centro stella del generatore e del centro
stella del carico, di modo che tali centri stella sono collegati tra loro mediante il terreno, che svolge le
funzioni del neutro.
Il neutro viene introdotto per avere disponibili le singolo tensioni di fase. Collegando un carico tra fase e
neutro, questo viene alimentato con le tensioni di fase. Un sistema trifase col neutro permette quindi di
alimentare i carichi alla tensione di fase (tra fase e neutro) e non solo alla concatenata (tra fase e fase).
Il neutro viene anche introdotto per evitare che una stella di carico dissimmetrica, alimentata con un sistema
di tensioni pressoché simmetrico, possa presentare uno spostamento eccessivo del centro stella rispetto al
centro stella del generatore simmetrico. Questo si verifica quando le impedenze dei tre rami della stella di
carico sono tra loro molto diverse; con la presenza del neutro la tensione viene vincolata a quella del centro
stella del generatore, con la sola differenza delle c.d.t..
Nel neutro può passare corrente; quindi la [6.14] diventa:
I1 + I 2 + I 3 + I n = 0
[6.63]
mentre la [6.11] rimane inalterata nella sua validità:
V12 + V23 + V31 = 0
[6.64]
Per un sistema trifase con neutro, nell'ipotesi di trascurare le c.d.t. sul neutro stesso, indicando con Ek le
tensioni di fase dei generatori, con Z k le impedenze delle singole fasi e con I k le correnti di fase, vale:
Ik =
Ek
Zk
[6.65]
e quindi:
⎛E
E ⎞
E
I n = −(I1 + I 2 + I 3 ) = −⎜⎜ 1 + 2 + 3 ⎟⎟
⎝ Z1 Z 2 Z 3 ⎠
[6.66]
La corrente di neutro risulta nulla quando le tre tensioni sono simmetriche e le tre impedenze sono tutte
uguali fra loro.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 22 di 53
7 - Il Trasformatore
7.1 - I Livelli di Tensione
La produzione, il trasporto, la distribuzione, l'utilizzo dell'energia elettrica avvengono a diversi livelli di
tensione. Livelli di tensione elevati permettono di ottenere la stessa potenza con correnti minori, in quanto:
A =V ⋅I
per il sistema monofase
A = 3V ⋅ I
per il sistema trifase
Correnti minori significa perdite minori per effetto Joule e quindi miglior rendimento del sistema. Questo è
importante soprattutto quando la potenza elettrica deve essere trasportata a distanze elevate e quindi le
perdite di trasmissione sono significative.
Un livello più elevato di tensione comporta però un maggior costo e un maggior ingombro del materiale
isolante. La realizzazione e l'utilizzo di macchinario elettrico per uso civile e domestico a tensioni molto
elevate non è praticabile. Inoltre un guasto di tipo cortocircuito, con perforazione del materiale isolante, che
si verifichi a livelli di tensione più elevata, è più pericoloso sia per le persone che per i materiali (rischi di
incendio).
Pertanto, il livello di tensione deve essere proporzionato all'ordine di grandezza della potenza in gioco e alle
distanze da percorrere.
Per utilizzi di tipo civile il livello di tensione che si ritiene accettabile è, come è ben noto, di 220/380 V o
(valore attuale) 230/400 V (monofase/trifase). Con questo livello di tensione per esempio un carico monofase
di 1÷1.5 kW (stufetta elettrica, forno, lavatrice) ha un assorbimento di corrente di 5÷8 A e un carico trifase di
3÷6 kW (macchina operatrice in una bottega artigiana, condizionatore in un esercizio commerciale di medie
dimensioni) ha una assorbimento di 5÷10 A. La tensione di 220/380 è pericolosa per le persone, ma uno
spessore isolante di pochissimi millimetri è più che sufficiente a garantire un elevato livello di sicurezza. Un
cortocircuito a tali tensioni innesca un incendio solo se le parti elettriche guaste vanno a contatto con
materiali facilmente infiammabili. Questo livello di tensione prende il nome di bassa tensione.
La potenza installata in un appartamento di abitazione è solitamente di 3 kW. Il consumo medio di una
famiglia è di qualche centinaio di watt, cioè pochissimi kWh al giorno. Si ricorda che:
1 kWh = 1 kW ⋅ 1 h = 1 kW ⋅ 3600 s = 3.6 MJ
il kWh è una unità di misura dell'energia.
Quando si tratti di alimentare non un singolo appartamento, ma un intero isolato o una porzione di un
quartiere con qualche centinaio di famiglie, o un'industria di dimensioni medio-grandi, la potenza in gioco
passa ad un ordine di grandezza delle centinaia di kW o ai MW. Le correnti diventano allora dell'ordine delle
centinaia di A. Conviene allora utilizzare un diverso livello di tensione, detto media tensione; i valori più
diffusi sono di 6, 10, 15, 20, 30 kV. I macchinari elettrici rotanti (generatori e motori) possono lavorare al
massimo a questi livelli di tensione (le macchine rotanti preferibilmente entro i 20 kV); quindi la produzione
avviene in media tensione.
Infine, quando si tratta di alimentare intere città o di portar fuori la potenza prodotta da una grande centrale
elettrica, e le potenze in gioco sono dell'ordine delle decine o centinaia di MW, o dei GW, si utilizzano livelli
di alta o altissima tensione: 130, 150 kV o 220 (o 230), 380 (o 400) kV. In altri paesi, con distanze maggiori
delle nostre (Siberia, Canada, America Latina) si usano livelli anche più elevati, come i 700 kV.
La "catena" quindi può essere vista in questo modo:
1)
produzione mediante generatori elettrici, in media tensione;
2)
immediato innalzamento della tensione a livelli alti o altissimi;
3)
trasporto dell'energia elettrica in alta o altissima tensione;
4)
abbassamento a livelli di media tensione alla porte dei centri abitati o delle industrie;
5)
distribuzione in media tensione nei quartieri urbani o nei reparti dello stabilimento;
6)
abbassamento a livelli di bassa tensione in prossimità dell'utilizzo;
7)
utilizzo in bassa tensione.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 23 di 53
Risulta quindi chiaro che occorrono opportuni dispositivi elettrici che permettano di innalzare o di abbassare
il livello di tensione. In corrente alternata, sfruttando l'effetto induttivo, questo è relativamente facile, ed è
realizzato da una macchina elettrica che prende il nome di trasformatore.
Una trasformazione di questo tipo può comportare una qualche dissipazione di energia, ma la macchina
deve poter funzionare senza bisogno di sorgenti esterne e quindi sostanzialmente deve conservare lo stesso
valore di potenza in ingresso e in uscita, fatto salvo appunto per le dissipazioni. Deve quindi valere che:
V1 ⋅ I1 ≅ V2 ⋅ I 2
[7.1]
quindi se vale che:
V2
=n
V1
deve anche valere che:
I2 1
=
I1 n
[7.2]
7.2 - Il Trasformatore monofase
La maggior parte dei trasformatori di potenza è trifase: i monofase si utilizzano per piccole potenze (uso
domestico); il principio di funzionamento però è lo stesso, ed è molto semplice. Si hanno due avvolgimenti
elettrici mutuamente accoppiati mediante un circuito magnetico in ferro. Il caso più semplice è quello in
figura:
i
i
1
2
v
v
1
2
figura 7.1
Se un avvolgimento è percorso da corrente in alternata, esso induce tensione sull'altro avvolgimento per
effetto induttivo. Si ricorda infatti che la corrente produce campo e induzione magnetici e quindi flusso
magnetico, che si concatena anche con l'altro avvolgimento; se la corrente varia nel tempo, il flusso varia
con la stessa legge; variazione di flusso nel tempo significa tensione indotta (legge di Faraday-Henry).
Si supponga che sia R il valore della riluttanza del circuito magnetico. Siano inoltre N1 , N 2 le spire dei due
avvolgimenti. Vale allora che il flusso che attraversa il circuito magnetico, detto flusso principale è dato da:
Φ=
N1i1 − N 2 i2
R
[7.3]
dove per i due avvolgimenti sono state prese convenzioni di verso discordi (è una scelta arbitraria, si poteva
fare anche diversamente). In particolare per l'avvolgimento 1, detto anche avvolgimento primario o
semplicemente primario, si utilizzerà la convenzione degli utilizzatori e per l'avvolgimento 2, detto anche
avvolgimento secondario o semplicemente secondario, la convenzione dei generatori. La scelta del lato da
considerare primario e di quello da considerare secondario è puramente arbitraria: la macchina è
perfettamente bidirezionale, cioè può portare potenza dal lato 1 al lato 2 o viceversa, senza alcuna difficoltà.
Generalmente si indica come primario il lato in cui, in quella particolare condizione di funzionamento, entra
potenza (e si comporta quindi come un utilizzatore) e come secondario il lato da cui la potenza esce (e si
comporta quindi come generatore).
Ciascun avvolgimento vedrà quindi un flusso concatenato, che si indica come flusso concatenato, principale
pari a:
N1i1 − N 2 i2
R
N i − N 2 i2
= N2 ⋅ Φ = N2 ⋅ 1 1
R
Ψ1 p = N1 ⋅ Φ = N1 ⋅
Ψ2 p
Versione 1.00 - ottobre 2010
[7.4]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 24 di 53
Inoltre ciascun avvolgimento produrrà una ulteriore porzione di flusso che si richiude però non nel circuito
ferromagnetico, ma in aria; tali flussi quindi, non avendo un circuito magnetico rigidamente definito, non
andranno quindi a concatenarsi mutuamente, ma ciascuno solo con il proprio avvolgimento. Prendono il
nome di flussi di dispersione:
Ψ1d =
N12
N2
i1 ; Ψ2 d = − 2 i2
R d1
Rd2
[7.5]
Per il secondo avvolgimento si è utilizzato il segno negativo, per la convenzione dei generatori,
coerentemente con la [7.4].
Il rapporto fra un flusso concatenato e la corrente che lo genera è una (auto o mutua) induttanza; si
definiscono allora:
L1d =
L2 d
Ψ1d
N2
= 1 ;
R d1
i1
Ψ
= 2d =
;
− i2 R d 2
N 22
Lm1 =
Ψ1 p
i1
Lm 2 =
=
Ψ2 p
− i2
N12
;
R
=
N 22
R
M 12 =
;
Ψ1 p
M 21 =
i2
=
Ψ2 p
i1
N1 N 2
=M
R
[7.6]
N N
= 2 1 =M
R
Le tensioni che si presentano in ogni avvolgimento sono pertanto:
(
)
d
di
di
di
Ψ1d + Ψ1 p = + R1 ⋅ i1 + L1d 1 + Lm1 1 − M 2
dt
dt
dt
dt
d
di2
di2
di
Ψ2 d + Ψ2 p = − R2 ⋅ i2 − L2 d
− Lm 2
+M 1
v2 = − R2 ⋅ i2 +
dt
dt
dt
dt
v1 = + R1 ⋅ i1 +
(
[7.7]
)
dove si è tenuto conto anche dell'effetto resistivo sugli avvolgimenti. Da quanto si vede da queste equazioni,
e come è comunque intuitivo, la macchina può funzionare solo se il regime è variabile, ed in particolare avrà
un funzionamento ottimale in regime P.A.S.. In seguito passeremo alla notazione fasoriale per tutte queste
equazioni.
Si nota che:
N2
N
Lm1 = 1 Lm 2
N1
N2
M=
[7.8]
Si definisca allora:
i2′ =
N2
i2
N1
[7.9]
la corrente i2′ è una corrente che, se fosse fatta circolare nell'avvolgimento 1, produrrebbe la stessa forza
magnetomotrice della corrente i2 nell'avvolgimento 2; infatti:
N1 ⋅ i2′ = N1
N2
i2 = N 2 ⋅ i2
N1
[7.10]
di tale valore di corrente si dice che è la corrente del secondario riportata al primario. Analogamente si può
definire la corrente del primario riportata al secondario.
Le equazioni [7.7] possono allora essere riscritte come:
di1
di
N di ′
di
di
+ Lm1 1 − M 1 2 = + R1 ⋅ i1 + L1d 1 + Lm1 1 (i1 − i2′ )
dt
dt
N 2 dt
dt
dt
di
di
di
di
N di ′
di
v2 = − R2 ⋅ i2 − L2 d 2 − Lm 2 2 + M 1 = − R2 ⋅ i2 − L2 d 2 − Lm 2 1 2 + M 1
dt
dt
dt
dt
N 2 dt
dt
v1 = + R1 ⋅ i1 + L1d
[7.11]
l'ultima parte della seconda equazione:
− Lm 2
N1 di2′
di
N2
N di′ N
di
N
d
+ M 1 = − 22 Lm1 1 2 + 2 Lm1 1 = 2 Lm1 (i1 − i2′ )
N 2 dt
dt
N 2 dt N1
dt N1
dt
N1
Versione 1.00 - ottobre 2010
[7.12]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 25 di 53
da cui le equazioni infine diventano:
di1
di
+ Lm1 1 (i1 − i2′ )
dt
dt
di
N
d
v2 = − R2 ⋅ i2 − L2 d 2 + 2 Lm1 (i1 − i2′ )
dt N1
dt
v1 = + R1 ⋅ i1 + L1d
[7.13]
Si definiscono allora le grandezze:
d
(i1 − i2′ )
dt
N
d
e2 = 2 Lm1 (i1 − i2′ )
N1
dt
e1 = Lm1
[7.14]
dove si nota che:
e2 N 2
=
e1 N1
[7.15]
Si può allora descrivere la macchina mediante il seguente circuito equivalente:
N
1
: N
2
i
2
i
1
v
v
1
2
figura 7.2
dove il componente centrale rappresenta un trasformatore ideale: cioè un dispositivo che trasforma le
tensioni e le correnti secondo un rapporto esattamente uguale al rapporto spire, in modo ideale: cioè le
tensioni trasformate non dipendono dalle correnti e le correnti trasformate non dipendono dalle tensioni (si
sarebbe potuto fare un modello analogo ponendo il ramo derivato al secondario anziché al primario, e
utilizzando quindi la corrente primaria riportata al secondario, i1′′ ).
Il ramo derivato e la corrente che lo attraversa hanno un significato ben preciso. Si suppongano per ora
trascurabili le c.d.t. dovute alle resistenze e alle induttanze di dispersione degli avvolgimenti. In tal modo si
può dire che le tensioni al primario e al secondario sono dovute solo all'effetto induttivo del flusso principale.
Perché tale flusso esista occorre però una forza magnetomotrice che lo produca. Questa f.m.m. è data da:
⎛
N ⎞
f.m.m. = N1 ⋅ i1 − N 2 ⋅ i2 = N1 ⋅ ⎜⎜ i1 − 2 i2 ⎟⎟ = N1 ⋅ (i1 − i2′ )
N1 ⎠
⎝
[7.16]
è cioè pari alla somma algebrica delle f.m.m. della corrente al primario e di quella al secondario, e in questo
va ricordato che la corrente al secondario, e quindi la sua f.m.m., sono discordi dalle stesse grandezze al
primario. L'effetto è lo stesso che si avrebbe con solo una corrente al primario di valore i1 − i2′ , che potrebbe
essere chiamata corrente di magnetizzazione. In realtà naturalmente primario e secondario sono percorsi
dalle rispettive correnti, e non esistono parti circuitali percorse effettivamente dalla corrente di
magnetizzazione, che quindi ha solo un valore virtuale, o matematico, o di corrente "equivalente".
Questa f.m.m. (cioè quella dovuta alla corrente di magnetizzazione) produce quindi il flusso principale:
Φp =
N1 ⋅ i1 − N 2 ⋅ i2 N1 ⋅ (i1 − i2′ )
=
R
R
[7.17]
e poiché il circuito magnetico è in ferro, il valore della riluttanza è molto piccolo e pertanto basta una f.m.m.
piccola per avere un flusso anche elevato. Il ramo derivato rende quindi ragione di questa f.m.m., o di questa
corrente di magnetizzazione. Se questa corrente non esiste, o ha valore nullo, non esiste flusso principale e
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 26 di 53
quindi non possono esistere tensioni indotte. In pratica la corrente magnetizzante è pari a valori dell'ordine
dello 0.2÷2% della corrente nominale (cioè della massima corrente prevista). La variazione nel tempo di
questa corrente di magnetizzazione, e quindi del flusso principale, comporta l'insorgere di una tensione
indotta per ogni spira:
e=
dΦ p
[7.18]
dt
che moltiplicata per il numero di spire di ciascun avvolgimento fornisce le tensioni già viste nella [7.14]:
e1 = N1 ⋅ e;
e2 = N 2 ⋅ e
[7.19]
Il fatto che basti una corrente magnetizzante piccola comporta una conseguenza molto importante: e cioè
che la corrente del primario e la corrente del secondario riportata al primario differiscono per un valore molto
piccolo; sono quindi quasi uguali. In questo senso si può dire che il trasformatore è una macchina quasi
ideale per quanto riguarda la trasformazione delle correnti, poiché:
N1 ⋅ i1 ≅ N 2 ⋅ i2
[7.20]
che significa che il rapporto tra le correnti è molto vicino a quello teorico, dato dal rapporto spire; mentre è un
po' meno ideale per quanto riguarda il rapporto tra le tensioni, perché le c.d.t. sulle resistenze e soprattutto
sulle induttanze di dispersione sono più rilevanti.
Generalmente i trasformatori funzionano a tensione imposta. Questo significa che uno dei due lati (il primario
o il secondario) è collegato ad una sorgente di f.e.m., solitamente P.A.S., di modo che la forma d'onda delle
tensioni di ogni avvolgimento, e quindi della tensione spira, è imposta. Nel Cap. 3 si era affrontato il
problema della magnetizzazione. Una tensione P.A.S. comporta che anche il flusso che la genera sia P.A.S.,
sfasato di π/2 rispetto alla tensione. Vale a dire che se:
e(t ) = EM ⋅ cos(ωt + ϕ)
e(t ) =
dΦ
dt
[7.21]
allora:
Φ(t ) =
EM
sin (ωt + ϕ) = Φ M sin (ωt + ϕ)
ω
[7.22]
In condizione di linearità del mezzo magnetico, la corrente di magnetizzazione è proporzionale al valore del
flusso, e quindi è anch'essa P.A.S.. Ma i materiali ferromagnetici presentano il fenomeno della saturazione,
pertanto la forma d'onda della corrente di magnetizzazione risulterà distorta rispetto ad una sinusoide
regolare, con un valore massimo superiore a quello previsto in condizioni di linearità. Questo però non è un
fenomeno preoccupante. Infatti la corrente di magnetizzazione è solo un piccolo valore di differenza tra la
corrente del primario e la corrente del secondario riportata al primario, ed è un valore percentualmente molto
piccolo rispetto a tali correnti. Se la corrente di magnetizzazione è distorta, questo significa che se una delle
due correnti è perfettamente regolare, l'altra sarà pari a questa ± un piccolo valore che non è perfettamente
sinusoidale, ma che per la sua piccolezza non produce distorsioni rilevanti sulla corrente complessivamente
assorbita o erogata dalla macchina.
Infine, va considerato un ultimo fenomeno, che è quello delle perdite nel ferro. Se un materiale
ferromagnetico è percorso da flusso magnetico variabile nel tempo, si presentano perdite per isteresi e per
correnti parassite. Nel regime P.A.S. tali perdite sono proporzionali al quadrato del valor massimo
dell'induzione, e quindi del flusso; induzione e flusso sono a loro volta proporzionali alla tensione per spira
generata. Pertanto le perdite nel ferro sono proporzionali al quadrato della tensione dovuta al flusso
principale; possono allora essere rappresentate come una resistenza sottoposta alla stessa tensione del
ramo di magnetizzazione.
Passando dal regime comunque variabile al regime P.A.S., ed introducendo nel circuito equivalente anche la
resistenza che simula le perdite nel ferro, ed indicando con Y0 l'ammettenza corrispondente al parallelo di
tale resistenza e dell'induttanza di magnetizzazione:
(
Y0−1 = Z 0 = RPfe || jωL1 p
)
[7.23]
si ha il seguente schema circuitale:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
Z
1B - Approfondimenti di elettrotecnica
N
1
: N
1
Z
2
p. 27 di 53
2
i
2
i
1
v
v
Y
1
2
0
figura 7.3
al quale corrispondono le seguenti equazioni:
V1 = + (R1 + jX 1 ) ⋅ I1 + E1
V2 = E2 − (R2 + jX 2 ) ⋅ I 2
[7.24]
I1 − I 2′ = (G0 + jB0 ) ⋅ E1
E2 =
N2
E1;
N1
I 2′ =
N2
I2
N1
[7.25]
Si noti che la potenza apparente assorbita dall'impedenza serie sul lato secondario vale:
AZ 2 = Z 2 ⋅ I 22 = (R2 + jX 2 ) ⋅ I 22
[7.26]
si vuole ora trovare una impedenza equivalente che, attraversata dalla corrente I 2′ , comporti la stessa
dissipazione di potenza:
Z 2′ ⋅ I 2′2 = Z 2 ⋅ I 22
⇒ Z 2′ = Z 2
I 22
N12
=
Z
2
I 2′2
N 22
[7.27]
Allora nel circuito l'impedenza al secondario potrebbe essere eliminata ponendo invece di questa
l'impedenza appena calcolata, ma posizionandola come da figura:
Z
Z
1
2
N
1
: N
2
i
2
i
1
v
v
Y
1
2
0
figura 7.4
in modo che sia percorsa dalla corrente del secondario riportata al primario.
Si dimostra facilmente che i due circuiti sono equivalenti non solo per quanto riguarda le potenze, ma anche
per le tensioni, cioè l'equivalenza è perfetta. Con lo schema precedente si aveva infatti:
V2 = E2 − Z 2 ⋅ I 2 = (V1 − Z1 ⋅ I1 )
N2
− Z2 ⋅ I2
N1
[7.28]
con quest'ultimo schema invece:
V2 = E2 = (V1 − Z1 ⋅ I1 − Z 2′ ⋅ I 2′ )
⎞N
N2 ⎛
N2
N
= ⎜⎜V1 − Z1 ⋅ I1 − 12 Z 2 ⋅ 2 I 2 ⎟⎟ 2 =
N1 ⎝
N1 ⎠ N1
N2
[7.29]
N
= (V1 − Z1 ⋅ I1 ) 2 − Z 2 ⋅ I 2
N1
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 28 di 53
e come si vede i due valori coincidono.
L'operazione di portare una impedenza da un lato all'altro del trasformatore, moltiplicandone il valore per il
quadrato del rapporto spire, prende il nome di riporto. In questo caso una impedenza al secondario è stata
riportata al primario. In questo modo le due impedenze Z1 e Z 2′ possono essere messe in serie in un unica
impedenza che prende il nome di Z cc :
Z cc = Z1 + Z 2′
[7.30]
Con lo schema come in quest'ultima configurazione, può risultare più agevole il calcolo del punto di
funzionamento. In questo caso si ha un circuito equivalente a Τ seguito dal trasformatore ideale.
Anche se il ramo derivato è molto importante dal punto di vista concettuale, per il suo significato fisico come
visto sopra, l'assorbimento di corrente e di potenza di tale ramo è molto piccolo in confronto alla corrente e
alla potenza in transito. Per questo molto spesso tale ramo viene trascurato nei calcoli e negli schemi
circuitali. Il trasformatore si riduce ad un semplice elemento serie seguito in cascata dal trasformatore ideale.
Un altro modo di rappresentare il circuito equivalente parte dalla considerazione che la tensione nel punto in
cui il ramo derivato è alimentato non è molto diversa da quella di ingresso al primario o di uscita al
secondario riportata al primario: la differenza sta solo nella c.d.t. sulle impedenze Z1 e Z 2′ . Anche se questa
differenza può essere dell'ordine di un 10%, considerando che comunque l'assorbimento del ramo derivato è
piccolo ci si può permettere un errore su di esso: è quindi lecito "spostare" il punto di inserzione del ramo
derivato dal punto intermedio tra Z1 e Z 2′ ad un punto a monte di Z1 (ingresso del primario) o a valle di Z 2′
(appena prima dell'ingresso al trasformatore ideale); si ha in questo modo un circuito equivalente a Γ
seguito in cascata dal trasformatore ideale.
Oppure si può suddividere l'ammettenza del ramo derivato in due parti, anche non uguali tra loro, da porre
una a monte di Z1 e una a valle di Z 2′ ; in questo modo si ha un circuito equivalente a Π seguito in cascata
dal trasformatore ideale.
Tutte queste configurazioni sono più o meno adeguate ai diversi tipi di analisi circuitale che si vogliono
affrontare.
Questi schemi, che prevedono 4 morsetti elettrici, prendono il nome di quadripoli; in particolare, tra i
quadripoli, si dicono doppi bipoli quelli in cui i morsetti possano essere accoppiati a due a due, ottenendo per
ogni coppia un morsetto di ingresso e uno di uscita, come nel caso dei circuiti equivalenti di cui sopra. Per un
generico quadripolo vale genericamente la legge di Kirchhoff, per cui la somma algebrica delle 4 correnti
deve essere nulla, senza altri vincoli; per il doppio bipolo si ha invece un vincolo in più, e cioè che la corrente
che entra da un morsetto di ingresso esce interamente dal corrispondente morsetto di uscita.
A prescindere da come sia configurato internamente il circuito, il doppio bipolo può essere descritto per un
osservatore esterno con una matrice ( 2 × 2 ). Ma si tornerà più approfonditamente su questo discorso in un
paragrafo successivo. Per ora basti sapere che per i doppi bipoli esistono 4 variabili di stato (2 tensioni e 2
correnti), e che una volta che 2 di queste 4 variabili sono imposte, sono univocamente determinate anche le
altre due.
Utilizzando comunque lo schema a T , è possibile valutare il funzionamento del trasformatore studiando
dapprima due situazioni estreme: il funzionamento a vuoto e il funzionamento in cortocircuito. Infine verrà
studiato il funzionamento con un carico generico.
7.2.1 - Funzionamento a vuoto
In questo caso il trasformatore viene alimentato dal lato primario mediante un generatore di tensione, mentre
i morsetti del secondario vengono lasciati aperti. In questo caso si impongono la tensione al primario e la
corrente al secondario (al valore 0). Si ha allora:
I1 =
V1
V
≅ 1
Z1 + Z 0 Z 0
[7.31]
Z0
V2′ = E1 = Z 0 ⋅ I1 =
V1 ≅ V1
Z1 + Z 0
l'approssimazione è valida perché l'impedenza del ramo derivato è molto grande. Da un punto di vista più
"fisico" succede questo: la corrente al primario non è compensata da alcuna corrente al secondario; pertanto
la corrente al primario è tutta magnetizzante, e quindi ne basta un valore molto piccolo per sostenere la
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 29 di 53
tensione di alimentazione: di fatto il trasformatore si comporta come un reattore, con una reattanza molto
elevata. Per questo la corrente di magnetizzazione è detta anche corrente a vuoto. Poiché la corrente di
magnetizzazione è dell'ordine di pochissimi % o frazioni di % della corrente nominale, la corrente a vuoto è
50÷500 volte più piccola della corrente nominale.
Con una piccola corrente la c.d.t. sulla resistenza e sulla reattanza di dispersione del primario è quindi molto
piccola: la tensione indotta coincide in pratica con la tensione di ingresso, e il trasformatore è quasi un
trasformatore ideale per quanto riguarda le tensioni. Nel funzionamento a vuoto la macchina non ha
praticamente dissipazioni di potenza sugli avvolgimenti, mentre sono al valore normale le perdite nel ferro.
7.2.2 - Funzionamento in cortocircuito
In questo caso il trasformatore viene alimentato dal lato primario mediante un generatore di tensione, mentre
i morsetti del secondario vengono richiusi in cortocircuito. In questo modo sono imposte la tensione al
primario e la tensione al secondario. Il ramo derivato e l'impedenza Z 2′ sono quindi posti in parallelo tra di
loro:
I1 =
V1
V1
V
≅
= 1
Z1 + (Z 0 || Z 2′ ) Z1 + Z 2′ Z cc
[7.32]
I 2′ ≅ I1
l'approssimazione è accettabile perché, essendo l'impedenza del ramo derivato molto grande, nel parallelo
essa diventa trascurabile. La corrente è limitata quindi solo dalle due impedenze degli avvolgimenti, la cui
serie prende proprio per questo il nome di impedenza di cortocircuito. Poiché questa impedenza provoca,
con il passaggio della corrente nominale, una c.d.t. dell'ordine del 4÷20%, la corrente di cortocircuito a
tensione nominale è dell'ordine di 5÷25 volte la corrente nominale. In queste condizioni si hanno fortissimi
surriscaldamenti della macchina e rischi di tipo elettromeccanico, perché tra conduttori percorsi da corrente
si presentano sempre delle forze di origine elettromagnetica. Il cortocircuito, come sempre, è pericoloso; se
si vuole "provare" la macchina in queste condizioni occorre eseguire la prova a tensione ridotta. Se si utilizza
una tensione di ingresso pari alla stessa c.d.t. che si presenta sull'impedenza di cortocircuito percorsa da
corrente nominale, si ottiene una corrente pari a quella nominale. Si parla quindi di tensione di cortocircuito,
pari, a seconda delle macchine, al 4÷20% della tensione nominale.
7.3 - Il trasformatore trifase
Poiché tutta l'impiantistica di potenza è trifase, è fondamentale conoscere il principio di funzionamento del
trasformatore trifase. Questo è fondamentalmente uguale a quello del trasformatore monofase, fatto salvo
che ogni fase subisce l'effetto non solo delle proprie correnti primaria e secondaria, ma anche delle correnti
delle altre due fasi.
Dal punto di vista costruttivo, nel trasformatore trifase si dedica una colonna di ferro a ciascuna fase,
ponendo su di essa sia l'avvolgimento primario sia il secondario. Solitamente tali avvolgimenti sono uno
avvolto sopra l'altro, separati ovviamente da strati di materiale isolante e anche da intercapedini per lasciar
circolare i fluidi di raffreddamento2.
Le tre colonne vanno poi raccordate tra loro per chiudere i circuiti magnetici. Un trasformatore trifase
perfettamente simmetrico potrebbe essere costruito con le colonne raccordate mediante gioghi disposti a
stella o a triangolo. In realtà i trasformatori non si costruiscono in questo modo (anche per la difficoltà di
raccordare i lamierini di ferro provenienti da gioghi disposti a 120° tra loro), ma per ora utilizziamo l'ipotesi
semplificativa che il circuito magnetico abbia una perfetta simmetria triangolare.
2
I trasformatori di potenza sono normalmente realizzati con gli avvolgimenti, opportunamente isolati, immersi in un bagno d'olio
(contenuto nel cassone che circonda la macchina stessa). L'olio ha la funzione di fluido di raffreddamento, e viene a sua volta
raffreddato per convezione con l'arie esterna. Olio e aria di raffreddamento possono avere circolazione naturale (moti convettivi) o
forzata, distinguendo così le tipologie ONAN, ONAF, OFAF ("O" = olio, "A" = aria, "N" = naturale, "F" = forzata). Per macchine MT/BT
o MT/MT di taglia fino alcuni MVA è possibile utilizzare invece la tecnologia a secco: gli avvolgimenti sono "annegati" in un resina
solidificata, che svolge per conduzione la funzione di asporto del calore. I trasformatori a secco sono meno costosi sia in costruzione
che in esercizio (l'olio richiede manutenzione), ma vi sono anche dei "contro": la resina è a rischio di rottura in caso di sbalzi rapidi di
temperatura o di infiltrazioni di gelo; in caso di guasto se gli avvolgimenti devono essere sostituiti la resina deve essere distrutta. Il
dibattito tra i fautori dell'una e dell'altra soluzione è in corso da decenni, anche se ormai i pro e i contri sembrano chiari e delimitano in
maniera abbastanza definitiva gli ambiti d'uso di ciascuna tecnologia.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 30 di 53
Le equazioni di funzionamento diventano allora, indicando con V A, B , C , I A, B , C le grandezza al primario e con
Va ,b ,c , I a ,b ,c le grandezze al secondario, e dove le tensioni sono tensioni di fase:
VA = R1 ⋅ I A + jωL1d ⋅ I A + jωM AA ⋅ (I A − I a′ ) + jωM AB ⋅ (I B − I b′ ) + jωM AC ⋅ (I C − I c′ )
VB = R1 ⋅ I B + jωL1d ⋅ I B + jωM BA ⋅ (I A − I a′ ) + jωM BB ⋅ (I B − I b′ ) + jωM BC ⋅ (I C − I c′ )
VC = R1 ⋅ I C + jωL1d ⋅ I C + jωM CA ⋅ (I A − I a′ ) + jωM CB ⋅ (I B − I b′ ) + jωM CC ⋅ (I C − I c′ )
Va = − R2 ⋅ I A 2 − jωL2 d ⋅ I a + jω
N2
[M AA ⋅ (I A − I a′ ) +M AB ⋅ (I B − I b′ ) +M AC ⋅ (I C − I c′ )]
N1
Vb = − R2 ⋅ I b − jωL2 d ⋅ I B 2 + jω
N2
[M BA ⋅ (I A − I a′ ) + M BB ⋅ (I B − I b′ ) + M BC ⋅ (I C − I c′ )]
N1
Vc = − R2 ⋅ I c − jωL2 d ⋅ I C 2 + jω
N2
[M CA ⋅ (I A − I a′ ) + M CB ⋅ (I B − I b′ ) + M CC ⋅ (I C − I c′ )]
N1
[7.33]
[7.34]
Osservando il circuito magnetico si nota che se questo è simmetrico il flusso magnetico generato in una
colonna si ripartisce in parti uguali nelle altre due, percorrendole in senso opposto rispetto alla colonna di
provenienza. Si può quindi allora scrivere che:
M AA = M BB = M CC = M
[7.35]
M AB = M BA = M BC = M CB = M CA = M AC = − M 2
Inoltre se il sistema della correnti è equilibrato, vale:
IB = α2 ⋅ I A
IC = α ⋅ I A
Ib = α ⋅ I a
Ic = α ⋅ Ia
2
[7.36]
e queste relazioni possono essere utilizzate nelle [7.33] e [7.34] ottenendo così una forma in cui scompaiono
i termini mutui:
⎛ ⎛ α2 α ⎞
⎛ α2 α ⎞⎞
VA = R1 ⋅ I A + jωL1d ⋅ I A + jωM ⋅ ⎜ I A ⎜⎜1 −
− ⎟⎟ − I a′ ⎜⎜1 −
− ⎟⎟ ⎟ =
⎜
2
2
2
2 ⎠ ⎟⎠
⎠
⎝
⎝ ⎝
3 ⎞
⎛3
= R1 ⋅ I A + jωL1d ⋅ I A + jωM ⋅ ⎜ I A − I a′ ⎟ =
2 ⎠
⎝2
3
= R1 ⋅ I A + jωL1d ⋅ I A + jω M ⋅ (I A − I a′ )
2
[7.37]
⎛ ⎛ α2 α ⎞
⎛ α2 α ⎞⎞
N2
− ⎟⎟ − I a′ ⎜⎜1 −
M ⋅ ⎜ I A ⎜⎜1 −
− ⎟⎟ ⎟ =
⎜
N1
2
2
2
2 ⎠ ⎟⎠
⎝
⎠
⎝
⎝
3 ⎞
N
⎛3
= − R2 ⋅ I a − jωL2 d ⋅ I a + jω 2 M ⋅ ⎜ I A − I a′ ⎟ =
2 ⎠
N1
⎝2
Va = − R2 ⋅ I a − jωL2 d ⋅ I a + jω
= − R2 ⋅ I a − jωL2 d ⋅ I a + jω
[7.38]
3 N2
M ⋅ (I A − I a′ )
2 N1
(analogamente per le altre fasi).
Il fattore di auto induzione risulta amplificato di un fattore 3/2, in modo da tenere conto dell'effetto delle
correnti delle altre fasi, che così non appaiono più esplicitamente.
N.B.: questo vale solo se il sistema trifase è simmetrico ed equilibrato.
Con queste espressioni si nota come si possa tornare alla rappresentazione monofase, in quanto è
sufficiente conoscere il comportamento di una sola fase per conoscere anche il comportamento delle altre.
Si usa così un circuito equivalente monofase per una macchina trifase. L'unica differenza da tenere presente
è che l'impedenza del ramo di eccitazione deve essere moltiplicata, a partire del valore calcolato con il
circuito magnetico, per il suddetto valore di 3/2.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 31 di 53
In realtà i trasformatori si costruiscono con la seguente forma:
figura 7.5
(anzi, gli avvolgimenti primario e secondario sono solitamente concentrici, uno dentro l'altro) dove ogni
colonna porta sia il primario sia il secondario di una fase, e dove si nota che il circuito magnetico non è
perfettamente simmetrico. Questo comporta che: le tre correnti di eccitazione, che in condizioni di simmetria
dovrebbero essere equilibrate, qui saranno diverse in modulo e poste tra loro ad angolo diversi dai 120°.
Questo però non è un fatto grave: ricordando che tali correnti sono solo frazioni minime delle correnti
principali, l'unica conseguenza è un leggerissimo disequilibrio tra le tre correnti principali al primario oppure
al secondario.
Una importante proprietà dei trasformatori trifasi è la possibilità di creare sfasamenti tra le grandezza al
primario e quelle al secondario, secondo multipli di 30°. Si consideri la seguente rappresentazione simbolica,
in cui si evidenziano gli avvolgimenti di ciascuna colonna e le loro tensioni:
U
1A
U
2A
U
1B
U
2B
U
1C
U
2C
figura 7.6
tra primario e secondario vale la relazione:
U 1 N1
≅
U 2 N2
[7.39]
nell'ipotesi di trascurare le c.d.t. dovute alle resistenze alle induttanze di dispersione.
Ogni lato del trasformatore presenta quindi 6 morsetti, 2 per ogni fase. Gli avvolgimenti su ciascun lato
possono quindi essere collegati tra loro in due modi diversi: a stella o a triangolo:
U
1A
A
U
1A
U
1B
U
1C
A
U
1B
B
B
U
1C
C
C
figura 7.7
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 32 di 53
Per quando riguarda i moduli delle tensioni concatenate, vale che:
Vi = U i
se il collegamento è a triangolo
[7.40]
Vi = 3 ⋅ U i
se il collegamento è a stella
[7.41]
Se il primario è a stella, lo si indica con il simbolo Y; se a triangolo, con il simbolo D. Per il secondario
valgono le lettere minuscole, y e d.
Combinando la [7.39] e la [7.40/41], e considerando che si hanno 4 diverse possibilità, i rapporti effettivi di
trasformazione risultano:
Yy:
V1
3 ⋅ U1
3 ⋅ N1 N1
=
=
=
V2
3 ⋅U 2
3 ⋅ N2 N2
[7.42]
Dy:
V1
U1
N1
=
=
V2
3 ⋅U 2
3 ⋅ N2
[7.43]
Yd:
3 ⋅ U1
3 ⋅ N1
V1
=
=
V2
U2
N2
[7.44]
Dd:
V1 U1 N1
=
=
V2 U 2 N 2
[7.45]
Si nota che per i tipi Dy e Yd appare un fattore
3 al numeratore o al denominatore.
Per quando riguarda gli sfasamenti, si considerino i seguenti esempi:
a)
Yy senza permutazione delle fasi
b)
Yy con capovolgimento e permutazione delle fasi
c)
Yd
d)
Dy (vedi Fig. 7.8)
a
A
b
B
c
C
c
V1B =VBC
Vca
V1C =VCA
Vbc
a
Vab
b
V1A =VAB
figura 7.8
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 33 di 53
Costruendo graficamente i diagrammi fasoriali delle tensioni per i casi suddetti, si può quindi notare che i
collegamenti Yy, ed analogamente i Dd, permettono sfasamenti di: 60°, 120°, etc., cioè di k ⋅ 60° ; mentre i
collegamenti Yd o Dy permettono sfasamenti di 30°, 90°, etc., cioè di 30° + k ⋅ 60° .
Quindi in generale è possibile ottenere sfasamenti di k ⋅ 30°
Il valore di k prende il nome di gruppo o, potendo variare da 0 a 11, di indice orario.
Questa proprietà che i trasformatori hanno di creare sfasamento tra secondario e primario può essere
sfruttata per usi particolari (per esempio per ottenere tensioni in quadratura); occorre però porre molta
attenzione nel caso di trasformatori in parallelo.
7.4 - Il metodo in p.u.
Per qualunque componente elettrico si possono definire una tensione e una corrente nominali, e di
conseguenza una potenza nominale pari al prodotto delle due grandezza precedenti.
Si consideri un trasformatore, sia esso monofase o trifase con rappresentazione monofase. Per esso sono
definite le grandezze nominali:
V1N
I1 N
V2 N
I2N
(nel caso di macchina trifase si usano le tensioni di fase e non le concatenate).
Vale che:
V1 N1 I 2
=
=
V2 N 2 I1
V1N ⋅ I1N = V2 N ⋅ I 2 N
[7.46]
Si definiscono allora tensioni e correnti in per unità (o per unit, p.u.):
v1 =
V1
V1N
i1 =
I1
I1N
v2 =
V2
V2 N
i2 =
I2
I2N
[7.47]
Il significato di tali grandezze è semplice e chiaro: quando uno di questi valori vale 1, significa che tale
grandezza è pari al suo valore nominale. I valori in p.u. forniscono quindi una informazione molto immediata.
Sono inoltre dati i parametri del circuito equivalente a Τ:
Z1
Z0
Z2
dove l'impedenza a vuoto è calcolata per esempio al primario (si potrebbero riportare al secondario con il
quadrato del rapporto spire).
Si definiscano allora:
Z1N =
V1N
I1 N
Z 2N =
V2 N
I2N
[7.48]
dette impedenza nominali; e quindi le impedenze in p.u. sono:
z1 =
Z1
Z1 N
z0 =
Z0
Z1 N
z2 =
Z2
Z2N
[7.49]
Si noti allora che:
v1 =
[
]
V1
1
=
z1 ⋅ Z1N ⋅ i1 ⋅ I1N + E1 = z1 ⋅ i1 + e1
V1N V1N
[
[7.50]
]
V
1
z 2 ⋅ Z 2 N ⋅ i 2 ⋅ I 2 N + E 2 = z 2 ⋅ i 2 + e2
v2 = 2 =
V2 N V2 N
si noti anche che, a partire della [7.46] e dalla [7.50]:
E1 N1
=
;
E2 N 2
V1 N1
=
; ⇒
V2 N 2
e1 = e2
Versione 1.00 - ottobre 2010
[7.51]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 34 di 53
inoltre:
e1 = e2 =
E1 Z 0 ⋅ I 0 Z 0 ⋅ i0 ⋅ I1N
=
=
= z 0 ⋅ i0
V1N
V1N
V1N
[7.52]
Si noti anche che:
i2′ =
I 2′
I
1 N2
=
I 2 = 2 = i2
I 1 N I 1 N N1
I2N
[7.53]
Le grandezze riportare dal secondario al primario (o viceversa) conservano lo stesso valore in p.u.
le equazioni di funzionamento possono allora essere riscritte come:
v1 = + z1 ⋅ i1 + z 0 ⋅ i0
v2 = − z 2 ⋅ i2 + z 0 ⋅ i0
[7.54]
i0 = i1 − i2
dal cui il circuito equivalente:
z1
z2
z0
figura 7.9
in cui non appare più il trasformatore ideale.
Il metodo in p.u. permette quindi:
-
di esprimere i valori delle variabili di stato e dei parametri in modo molto immediato
-
di esprimere tali valori in modo indipendente dall'essere al primario o al secondario
-
di eliminare dai circuiti equivalenti i trasformatori ideali
Poiché si trova, dall'esperienza costruttiva dei trasformatori che valori dei parametri in p.u. sono dell'ordine:
z0 = 50 ÷ 200 p.u.
z1 + z2 = 0.04 ÷ 0.25 p.u.
ecco che risultano più chiari i discorsi fatti alla fine del par. 7.2:
a)
nel funzionamento a vuoto,
z = z1 + z0 ≅ z0
quindi alimentando a tensione nominale si ottiene la corrente a vuoto:
i1(0 ) = v1 z0 = 1 z0 = y0 ≅ 0.005 ÷ 0.020 p.u.
b)
nel funzionamento in cortocircuito:
z = z1 + z0 || z 2 ≅ z1 + z 2 = zcc
quindi alimentando a tensione ridotta in modo da ottenere la corrente nominale:
v1(cc ) = zcc ⋅ i1 = zcc ⋅ 1 = zcc ≅ 0.04 ÷ 0.25 p.u.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 35 di 53
Per questo il valore z cc viene spesso chiamato anche vcc (tensione di cortocircuito).
E' molto importante sapere come regolarsi in caso di parallelo di trasformatori.
Perché due trasformatori possano essere posti in parallelo occorre rispettare le seguenti condizioni:
3 nei casi Dy o
1)
il rapporto di trasformazione (il rapporto spire, eventualmente moltiplicato o diviso per
Yd) deve essere lo stesso per le due macchine
2)
il gruppo o indice orario deve essere lo stesso
3)
le due macchine devono avere la stessa vcc nel loro rispettivo p.u.: solo in questo modo infatti le
macchine trasporteranno potenza in proporzione alla loro potenza nominale, realizzando così una
distribuzione "equa" della potenza da trasportare, in una condizione in cui ogni macchina è "caricata"
allo stesso modo in proporzione alle sue possibilità.
La necessità delle due condizioni 1) e 2) è intuitiva: i primari sono alimentati dalla stessa sorgente di
tensione; i secondari dei due trasformatori devono trovarsi, a parte le c.d.t., nelle stesse condizioni di
tensione per poter essere posti in parallelo; quindi i rapporti di trasformazione devono essere gli stessi.
La condizione 3) è più comprensibile con qualche passaggio matematico. Si abbiano due macchine, A e B;
per esse si hanno tensioni e correnti nominali (si usano le tensioni di fase):
V1(NA )
I1(NA ) V2(NA )
V1(NB )
(B )
1N
V2(NB )
I 2( AN)
I 2( BN)
dove dovrà essere:
V1(NA ) = V1(NB )
[7.55]
V2(NA ) = V2(NB )
mentre:
I1(NA ) =
(B )
I1 N
AN( A ) ( A )
AN( A )
I
=
2N
3 ⋅ V1(NA )
3 ⋅ V2(NA )
[7.56]
A( B )
A( B )
= N ( B ) I 2( BN) = N ( B )
3 ⋅ V1N
3 ⋅ V2 N
La dimostrazione è molto semplice: a fronte della stessa d.d.p. v1 − v2 , le correnti che passano in ciascuna
macchina sono:
i ( A, B ) =
v1 − v2
z cc( A,B )
[7.57]
poiché si vuole che ogni macchina sia caricata in proporzione alla sua potenza nominale, cioè si vuole che la
corrente in p.u. di ogni macchina - come espressa dalla [7.57] - sia la stessa, allora occorre siano uguali le
impedenza di cortocircuito.
7.5 - Cenni ai problemi termici
Nel trasformatore, come in ogni macchina elettrica, si presenta, per effetto Joule negli avvolgimenti e per
correnti parassite e isteresi nel ferro, produzione di calore da dissipare. Questo, oltre ad essere
svantaggioso ai fini del rendimento, crea problemi di surriscaldamento.
Si noti che le perdite negli avvolgimenti sono proporzionali al quadrato della corrente, quindi variano molto
con il carico, mentre le perdite nel ferro sono proporzionali al quadrato della tensione e quindi pressoché
costanti. A corrente nominale, le prime sono però più rilevanti delle seconde (da 2 a 10 volte maggiori).
Quando la macchina viene messa in servizio, essa si trova alla temperatura dell'ambiente esterno. Il calore
prodotto inizialmente si accumula nella massa stessa del trasformatore, la cui temperatura aumenta;
all'aumentare della differenza di temperatura aumenta la dissipazione del calore verso l'esterno, di modo che
solo una frazione decrescente del calore prodotto viene accumulato. La temperatura aumenta via via più
lentamente, fino al raggiungimento di una temperatura di regime alla quale lo scambio verso l'esterno è pari
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 36 di 53
alla potenza prodotta (regime termico). Si presenta così una sovratemperatura rispetto all'esterno. La
temperatura totale non deve essere pericolosa per i materiali isolanti.
Per facilitare lo scambio termico, spesso il trasformatore è in un bagno d'olio (che è elettricamente isolante)
e il cassone che contiene l'olio e la macchina vera e propria presenta alettature verso l'esterno per facilitare
lo scambio termico o, per le macchine di maggiore potenza, ventole di raffreddamento forzato. L'olio nel
cassone circola per convezione naturale tra le parte più calde (rame, ferro) dove asporta calore, e le parti
dove questo calore può essere dissipato (pareti del cassone); tra l'avvolgimento primario e il secondario di
ciascuna colonna, e a volte anche fra gli strati di uno stesso avvolgimento, vengono lasciati degli interstizi
(canali) anche di pochi millimetri, per permettere all'olio di passare e svolgere la sua funzione refrigerante. In
casi particolari anche la circolazione dell'olio è forzata.
7.6 - L'autotrasformatore
L'autotrasformatore è una variante del trasformatore tradizionale, e rispetto a questo presenta una
particolare modalità costruttiva: anziché avere due distinti avvolgimenti per primario e secondario,
elettricamente isolati, esiste un solo avvolgimento che per un certo numero di spire è comune sia al primario
che al secondario. Si consideri per esempio il caso con N1 < N 2 . Nell'autotrasformatore si hanno allora N1
spire con una certa sezione, in serie con le rimanenti N 2 − N1 spire di sezione differente. Le spire sono
avvolte sulla colonna, e non esistono altri avvolgimenti (per quella fase).
Il morsetto inferiore delle N1 spire è comune sia al primario sia al secondario, e svolge per esempio la
funzione di uscita per la corrente primaria e di ingresso per la secondaria. Il morsetto superiore delle N1
spire è solo per il primario, e svolge la funzione di ingresso per la corrente del primario. Il morsetto finale
delle N 2 − N1 spire è solo per il secondario, e svolge la funzione di morsetto di uscita della corrente del
secondario.
In questo modo le N1 spire sono percorse dalla somma algebrica delle correnti primaria e secondaria, pari a
i1 − i2 , mentre le N 2 − N1 spire sono percorse solo dalla corrente secondaria i2 , che circola con verso
opposto alla corrente primaria. In questo modo la f.m.m. totale è data da:
N1 (i1 − i2 ) − (N 2 − N1 )i2 = N1i1 − N 2 i2
[7.58]
come in un trasformatore tradizionale. La differenza sta nel fatto che si ha minore potenza perduta per effetto
Joule e si risparmia materiale conduttore.
Si consideri infatti il seguente esempio: un trasformatore prevede una corrente primaria di 100 A e una
secondaria di 60 A, con N1 = 30 e N 2 = 50 ; la lunghezza media di una spira sia di 1m e la sezione sia
dimensionata in modo da avere una densità di corrente di 5 A/mm2.
Con un trasformatore tradizionale si avrebbero due sezioni rispettivamente di 20 mm2 e di 12 mm2, per una
lunghezza degli avvolgimenti primario e secondario rispettivamente di 30 m e 50 m. In totale si
hanno (20 × 30 + 12 × 50 ) mm 2 ⋅ m = 1.200 dm 3 di rame.
Con un autotrasformatore invece le prime N1 spire devono essere dimensionate solo per 100-60 = 40 A e
quindi bastano 8 mm2 di sezione, per una lunghezza di 30 m, mentre le rimanenti N 2 − N1 spire sono
percorse da 60 A e quindi necessitano dei 12 mm2, per una lunghezza di 50-30 = 20 m In totale si hanno
(8 × 30 + 12 × 20) mm 2 ⋅ m = 0.480 dm3
di rame, pari al 40% della macchina tradizionale. Il risparmio è quindi
del 60%; le perdite nel rame, a parità di densità di corrente, sono proporzionali al peso del conduttore e
quindi diminuiscono della stessa misura.
Il vantaggio è quindi evidente, e l'entità del risparmio può essere calcolata in termini generali. Indicando con
J 0 la densità di corrente prevista, con l la lunghezza media di una spira, allora per un trasformatore
tradizionale:
A1 =
I1
;
J0
A2 =
Vol1 = N1l A1 =
I 2 N1 I 1
=
J0 N2 J0
[7.59]
N lI
N lN I
N lI
N1l I1
;Vol 2 = N 2 l A2 = 2 2 = 2 1 1 = 1 1
J0
N2 J0
J0
J0
Versione 1.00 - ottobre 2010
[7.60]
A.A. 2010-2011
G. Pasini
Vol (tradiz .) = 2
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
N1l I1
J0
p. 37 di 53
[7.61]
mentre per un autotrasformatore:
A1 =
I 1 − I 2 I 1 − N1 I 1 N 2 N 2 − N1 I 1
=
=
;
J0
J0
N2 J0
Vol1 = N1l A1 =
Vol (autotr .) = 2
N1 l (N 2 − N1 )I1
;
N2 J0
A2 =
I 2 N1 I 1
=
J0 N2 J0
Vol2 = (N 2 − N1 )lA2 =
[7.62]
(N 2 − N1 )l N1 I1
[7.63]
N2 J0
N1 (N 2 − N1 )l I1
N2 J0
[7.64]
Quindi il rapporto tra i due volumi di conduttore è:
β=
Vol (autotr .)
N1 (N 2 − N1 )lI1 N 2 J 0 N 2 − N1
=
(tradiz .) = 2
N1lI1 J 0
N2
Vol
[7.65]
(nell'esempio infatti era: (50 − 30) 50 = 0.40 ).
Dalla [7.65] si nota come il vantaggio sia tanto maggiore (il che si verifica quando il rapporto β è piccolo)
quanto più i due numeri di spire N1 , N 2 siano vicini tra loro. Se si verifica che N 2 >> N1 allora β ≅ 1 e quindi
il vantaggio è minimo. Il caso limite è quello di un autotrasformatore con rapporto spire unitario, dove si
avrebbe β = 0 e quindi risparmio completo di rame e di dissipazione: in pratica la macchina non esisterebbe.
Esistono però degli svantaggi. Il più importante è il fatto che primario e secondario non sono elettricamente
isolati. Questo comporta che perturbazione brusche, guasti, etc. su uno dei due lati del trasformatore
verrebbero percepite in egual misura sull'altro lato, senza il filtro del solo accoppiamento magnetico, come
su un trasformatore tradizionale.
Pertanto, gli autotrasformatori vengono usati solo come macchine di interconnessione tra livelli di tensione
abbastanza vicini (per esempio 220 kV / 380 kV) in modo da avere un risparmio consistente e quando non è
fondamentale il disaccoppiamento elettrico tra primario e secondario.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 38 di 53
8 - Le Macchine Elettriche Rotanti
8.1 - Generalità
8.1.1 - Tensione su un conduttore in moto in un campo magnetico
Si consideri il caso di un circuito elettrico come in figura, costituito da un'unica spira rettangolare, in cui il lato
a destra è mobile.
v
0
figura 8.1
La spira è immersa in un campo magnetico, di induzione
pertanto è attraversata da un flusso magnetico:
B , rivolto perpendicolarmente alla spira. La spira
Φ = B⋅ A= B⋅a⋅l
[8.1]
dove a e l sono le dimensioni della spira; poiché il lato di destra è mobile, con velocità v(t ) :
t
Φ = B ⋅ A(t ) = B ⋅ l ⋅ ⎛⎜ a0 + ∫ v(τ )dτ ⎞⎟
0
⎝
⎠
[8.2]
nella spira si genera pertanto una tensione:
e(t ) =
dΦ
= B ⋅ l ⋅ v(t )
dt
[8.3]
e poiché i rami fissi sono completamente passivi, tale tensione si manifesta tutta sul lato in movimento.
Pertanto su un conduttore in movimento in un campo magnetico in direzione perpendicolare al
campo stesso si genera una tensione, secondo la seguente espressione che risulterà molto utile nel
seguito del capitolo:
e = B ⋅l ⋅v
[8.4]
Si noti ancora che, se il conduttore è percorso da corrente, tale corrente fluisce in direzione perpendicolare
al campo magnetico; per effetto della forza di Lorentz sul conduttore, sia esso in movimento sia esso fermo,
agirà una forza:
F = B⋅l ⋅i
[8.5]
che agirà in direzione perpendicolare sia al campo sia al conduttore, e quindi nella direzione dell'eventuale
moto, a favore o contro di esso a seconda del verso della corrente.
8.1.2 - Campo magnetico rotante
Si consideri il circuito magnetico in figura, composto da tre spire rettangolari, AA', BB', CC', di uguali
dimensioni disposte in modo che gli stessi assi di simmetria dei tre rettangoli siano coincidenti, e che i tre
rettangoli siano posti a 120° l'uno dall'altro intorno a tale asse:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 39 di 53
A'
u Bn
C
B
u An
B'
C'
u Cn
A
figura 8.2
Si supponga di alimentare le tre spire con un sistema di correnti trifase equilibrato, in cui si abbia cioè:
i A (t ) = I M ⋅ cos(ωt + ϕ)
iB (t ) = I M ⋅ cos(ωt + ϕ − 2π 3)
[8.6]
iC (t ) = I M ⋅ cos(ωt + ϕ + 2π 3)
ponendosi nel centro della sezione, e indicando con u X il versore che rappresenta la direzione dell'asse
normale alla sezione AA' e con uY la direzione a questa perpendicolare, si nota che ogni spira contribuirà a
creare un campo magnetico con componenti su entrambe queste due direzioni. Infatti ogni spira creerà un
campo magnetico nella direzione del proprio asse normale, e indicando con u An ,u Bn ,uCn i versori che
rappresentano le direzioni di tali assi, si ha che:
u A = u X ⋅ cos(0°) + uY ⋅ sin (0°) = u X
1
3
u B = u X ⋅ cos(+ 120°) + uY ⋅ sin (+ 120°) = − u X +
uY
2
2
1
3
u B = u X ⋅ cos(− 120°) + uY ⋅ sin (− 120°) = − u X −
uY
2
2
[8.7]
Pertanto:
1
1
BX = B AX + BBX + BCX = 1 ⋅ B A − ⋅ BB − ⋅ BC =
2
2
⎛ 1
⎞
1
3
= 1 ⋅ BM ⋅ cos(ωt + ϕ) − ⋅ BM ⋅ ⎜⎜ − cos(ωt + ϕ) +
sin (ωt + ϕ)⎟⎟ +
2
2
⎝ 2
⎠
1
− ⋅ BM
2
[8.8]
⎛ 1
⎞ 3
3
⋅ ⎜⎜ − cos(ωt + ϕ) −
sin (ωt + ϕ)⎟⎟ = ⋅ BM ⋅ cos(ωt + ϕ)
2
⎝ 2
⎠ 2
BY = BAY + BBY + BCY = +
3
3
⋅ BB −
⋅ BC =
2
2
⎞
⎛ 1
3
sin (ωt + ϕ)⎟⎟ +
⋅ ⎜⎜ − cos(ωt + ϕ) +
2
⎠
⎝ 2
⎛ 1
⎞ 3
3
3
−
⋅ BM ⋅ ⎜⎜ − cos(ωt + ϕ) −
sin (ωt + ϕ)⎟⎟ = ⋅ BM ⋅ sin (ωt + ϕ)
2
2
⎝ 2
⎠ 2
=+
3
⋅ BM
2
[8.9]
si nota allora come il vettore induzione risultante:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
B (t ) = u X ⋅ B X (t ) + uY ⋅ BY (t ) =
1B - Approfondimenti di elettrotecnica
3
BM ⋅ (u X ⋅ cos(ωt + ϕ) + uY ⋅ sin (ωt + ϕ))
2
p. 40 di 53
[8.10]
sia una vettore rotante nello spazio, con velocità angolare ω, e con modulo costante e pari ai 3/2 del valore
massimo di induzione prodotto da ciascuna fase.
Si è così realizzato il campo magnetico rotante, ottenibile con un sistema di correnti trifase o, più in generale,
con un sistema polifase.
Si noti che il vettore induzione rotante "passa" per l'asse normale a ciascuna spira quando la corrente in tale
spira "passa" per il suo valore massimo.
Generalmente si realizza un circuito magnetico con le tre spire alloggiate dentro opportune scanalature,
dette cave, delle pareti interne di un cilindro di materiale ferromagnetico con una cavità cilindrica coassiale al
suo interno (una specie di tubo con pareti di grande spessore), come da figura; inoltre si pone un secondo
cilindro, di materiale ferromagnetico, anch'esso coassiale, separato dalle pareti interne dell'altro cilindro da
un sottile traferro di aria. Il cilindro cavo prende il nome di statore, ed è fisso; il cilindro interno prende il nome
di rotore e può ruotare intorno all'asse principale.
figura 8.3
Il traferro è d'obbligo per evitare attriti tra le pareti durante la rotazione del rotore; si cerca sempre però di
costruire la macchina con tale traferro molto piccolo, in modo da contenere il più possibile la riluttanza del
circuito magnetico, che è prevalentemente in ferro. Poiché la macchina non può essere immersa in olio, che
opporrebbe un forte attrito viscoso alla rotazione ad alte velocità, il raffreddamento avviene solo grazie
all'aria presente nel traferro, e questo vincola il costruttore a non poter fare traferri troppo piccoli perché non
potrebbero garantire un raffreddamento sufficiente. Per macchine di grande potenza l'atmosfera d'aria è
sostituita con idrogeno o altri gas, più efficienti nel raffreddamento.
Le linee di forza dell'induzione magnetica cercano sempre la strada più breve per descrivere il loro percorso;
pertanto attraversano il traferro (che incontrano due volte nel loro percorso) sempre in direzione
perpendicolare alle superfici cilindriche di statore e rotore, cioè in direzione radiale.
Poiché il campo magnetico è rotante, il valore dell'induzione al traferro varia da punto a punto e da istante a
istante. Si può scrivere una legge del tipo:
Bt = Bt (t , α ) = BM ⋅ cos(ωt + ϕ − α )
[8.11]
dove ϕ è la fase iniziale della corrente nella spira AA' mentre α è la posizione (angolare) di un generico
punto lungo il traferro, a partire dall'asse normale alla spira AA' e con verso angolare positivo se ci sposta
verso l'asse normale a BB'. Infatti:
a)
se ci si fissa su un punto della circonferenza, per esempio quello in cui si trova l'asse normale a BB', si
avrà che l'induzione al traferro è vista solo come dipendente dal tempo, secondo la seguente
espressione:
Bt = Bt (t , α = 2π 3) = BM ⋅ cos(ωt + ϕ − 2π 3)
[8.12]
che è una espressione solo del tempo, e dove si nota che il valore massimo viene raggiunto quando:
ωt = −ϕ + 2π 3
[8.13]
con tale valore la corrente nella fase B vale:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
iB = I M ⋅ cos(− ϕ + 2π 3 + ϕ − 2π 3) = I M
p. 41 di 53
[8.14]
quindi si ritrova che l'induzione assume il valore massimo sull'asse normale ad una fase quando in tale
fase è massima la corrente;
b)
se si fissa il tempo in un dato istante, per esempio l'istante in cui la corrente è massima sulla fase C:
ωt = −ϕ − 2π 3
[8.15]
l'induzione al traferro è vista solo come dipendente dalla posizione, secondo l'espressione:
Bt = Bt (t = − (ϕ + 2π 3) ω , α ) = BM ⋅ cos(− 2π 3 − α )
[8.16]
in cui si nota che, come deve essere, il valore massimo dell'induzione si trova in corrispondenza di
α = 2π 3 che è la posizione dell'asse normale a CC'.
Si noti anche che se un osservatore percorresse la circonferenza con velocità angolare ω , in modo che la
sua posizione sia:
α = ωt
[8.17]
esso percepirebbe un valore di induzione pari a:
Bt = Bt (t , α ) = BM ⋅ cos(ω t + ϕ − α ) = BM ⋅ cos(ω t + ϕ − ωt ) = BM ⋅ cos(ϕ)
[8.18]
ovvero un valore di induzione costante.
Ogni fase è in generale presente anche con più di una spira. Spesso si usano più spire avvolte in serie e
quindi i conduttori occupano una porzione della circonferenza. Le varie spire quindi non sono tutte
perfettamente orientate sullo stesso asse, perché tra una spira e l'altra esiste il piccolo angolo necessario
perché le cave abbiano il loro spazio. L'importante è che gli assi delle varie spire, sommati, diano per
risultante un asse mediano orientato come si desidera, e cioè a 120° di distanza dall'asse mediano degli
avvolgimenti delle altre fasi. Quindi ogni fase avrà un insieme di conduttori di "andata" (A,B,C) e agli antipodi
un insieme di conduttori di "ritorno" (A',B',C'). L'asse mediano è l'asse del piano che congiunge le mezzerie
dei settori angolari occupati da questi gruppi. In totale ci sono: 3 fasi x 2 gruppi per fase = 6 settori angolari
impegnati, distanti 60°; nell'ordine: A/C'/B/A'/C/B'
Si possono però costruire macchine in cui ogni fase abbia: un gruppo di conduttori di andata (A,B,C) e un
gruppo di ritorno (A',B',C'), e poi ancora un gruppo di andata (A'',B'',C'') e un gruppo di ritorno (A''',B''',C''').
Quindi la disposizione angolare è tale che le varie fasi sono distanti non 120° ma 60°, e i settori 30°;
nell'ordine: A/C'/B/A'/C/B'/A''/C'''/B''/A'''/C''/B'''. L'andamento dell'induzione è più complicato, ma non di molto:
succede che, a tempo bloccato, percorrendo la circonferenza si incontrano i valori massimo e minimo di
induzione non una volta sola, bensì due:
Bt = Bt (t , α ) = BM ⋅ cos(ωt + ϕ − 2α )
[8.19]
Nel caso precedente si dice che la macchina ha 2 poli o, più comunemente, 1 paia poli (pp=1). Per polo si
può intendere il numero di settori di ogni fase, quindi nel caso precedente uno di andata e uno di ritorno, = 2.
In questo caso invece si hanno 4 poli e quindi pp=2. I paia poli possono essere anche 3, 4 o molti di più.
Allora in generale:
Bt = Bt (t , α ) = BM ⋅ cos(ωt + ϕ − pp ⋅ α )
[8.20]
Si noti che per percepire sempre lo stesso flusso occorre spostarsi sulla circonferenza con velocità angolare:
ωm =
ω
pp
[8.21]
infatti:
⎛
ω ⎞
Bt = Bt (t , α ) = BM ⋅ cos⎜⎜ ωt + ϕ − pp ⋅
t ⎟ = BM ⋅ cos(ϕ)
pp ⎟⎠
⎝
[8.22]
I vari paia poli di ogni fase possono essere collegati in serie, se si vuole una maggiore tensione, oppure in
parallelo, se si vuole una maggiore corrente; oppure, con pp grande, si possono fare combinazioni serie
parallelo (es. pp=6 permette di avere 6 pp in serie, 6 pp in parallelo, 3 serie di 2 pp in parallelo ciascuna, 2
serie di 3 pp in parallelo ciascuna).
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 42 di 53
8.2 - Cenni alla Macchina Sincrona
Nella macchina sincrona il rotore ha una forma del tipo (esempi con pp=1 e pp=2):
figura 8.4
dove le protuberanze del rotore prendono il nome di teste polari. Nella realtà il rotore non è così "magro"
come appare in figura, anche perché occorre ottimizzare l'utilizzo degli spazi (il campo magnetico circola
bene solo nel ferro): nella macchina reale non c'è così tanto spazio "in aria". La figura quindi deforma ed
esalta la forma del rotore, solo per far capire che non si tratta più di un rotore perfettamente cilindrico.
Il rotore porta su di sé un avvolgimento in c.c. che produce un flusso magnetico, detto flusso di eccitazione.
Quando il rotore è posto in rotazione, il flusso di eccitazione ruota con esso; pertanto si ottiene anche in
questo modo un flusso rotante.
Gli avvolgimenti trifase statorici sono così attraversati da un flusso rotante, pertanto in ciascuno di essi:
Φ = Φ(t ) = Φ M ⋅ cos(ωt + ϕ)
[8.23]
(con sfasamento di 120° tra le tre fasi).
Si ottiene quindi tensione indotta nelle varie fasi, e si è quindi realizzato, in modo molto semplice, un
generatore di tensione.
Se gli avvolgimenti statorici sono collegati ad un carico esterno, in essi circolerà corrente. Questa corrente
creerà un altro campo magnetico rotante, che ruoterà alla stessa frequenza di quello di eccitazione. Pertanto
il rotore percepisce così un altro flusso oltre al proprio, ma dal suo punto di vista entrambi i flussi sono fermi,
quindi non percepisce variazione di flusso e quindi non ci sono tensioni indotte sui suoi avvolgimenti.
Pertanto la corrente rotorica, detta corrente di eccitazione, non subisce cadute di tensione di origine induttiva
(almeno, non se si è in condizioni di regime) ed è quindi limitata solo dalla resistenza ohmica del suo
medesimo conduttore (resistenza rotorica).
Tra le correnti statoriche e quelle rotoriche si creano delle forze di origine elettromeccanica (se si preferisce
si possono vedere tali forze come forze agenti su conduttori immersi in campi magnetici, vedi [8.5]) e tali
forze danno origine ad una coppia che si oppone al moto angolare. La potenza meccanica necessaria a
mantenere la rotazione si trasforma quindi in potenza elettrica. Quando il carico del generatore è di tipo
puramente reattivo, le correnti statoriche e il flusso rotorico sono sfasati esattamente in modo da dare origine
ad una coppia nulla (la macchina non sta erogando potenza elettrica), fatto salvo per le perdite per effetto
Joule.
La macchina eroga tensione tanto maggiore quanto più grande è il flusso di eccitazione e la velocità di
rotazione. Inoltre la tensione prodotta è alla stessa frequenza della frequenza meccanica di rotazione,
moltiplicata per il paia-poli:
ωe = pp ⋅ ωm
[8.24]
La macchina sincrona può lavorare anche come motore, ma deve ruotare a velocità angolare fissa, secondo
la stessa [8.24]. Quindi le sue applicazioni come motore sono limitate e particolari. Inoltre non è
autoavviante: esiste coppia motrice solo quando la [8.24] è soddisfatta. Necessita quindi di un motore "di
lancio" che la porti in sincronismo.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 43 di 53
8.3 - Cenni alla Macchina in Corrente Continua
Dal punto di vista descrittivo e del principio di funzionamento è probabilmente la macchina più complessa. Si
forniranno quindi solo gli aspetti essenziali, rimandando ad altri corsi un eventuale approfondimento. In
figura la sezione di una macchina in c.c.:
7 8
6
9
5
4
10
11
3
2
1
12
figura 8.5
Il circuito di eccitazione è tipicamente posto sullo statore. Le sagome particolari che si vedono (la figura,
come sempre, esalta queste forme rispetto a quanto esiste nella macchina reale) prendono il nome di scarpe
polari e hanno la funzione di ottenere un traferro di dimensioni variabili, in modo che sulla mezzeria della
scarpa il traferro sia minimo e quindi il valore dell'induzione sia massimo (positivo o negativo), mentre
allontanandosi il traferro cresca e quindi l'induzione diminuisca, ottenendo così lungo il traferro una
distribuzione di induzione di tipo sinusoidale.
Il circuito di potenza è posto sul rotore. La corrente di rotore per la macchina in c.c. è detta anche corrente di
armatura. Utilizzando la [8.4] i vari conduttori indicati sono sottoposti a tensioni con lo stesso segno, per
esempio positivo, se si trovano nella metà inferiore della circonferenza, e di segno opposto se nella metà
superiore. Sommando tutte queste tensioni si otterrebbe valore nullo. Infatti i vari conduttori sono posti in
serie uno con l'altro a formare un avvolgimento di molte spire che si richiude su stesso. Non si entra nei
dettagli costruttivi o anche solo descrittivi di tale avvolgimento. E' possibile però costruire tale avvolgimento
in modo che siano posti in serie tutti i conduttori con lo stesso segno e, in serie a questi, quelli con segno
opposto, ma presi con verso discorde. O meglio: un conduttore della metà inferiore, in cui si induce tensione
positiva, è posto in serie con il corrispondente (agli antipodi) della metà inferiore, dove è indotta tensione
negativa ma che è collegato con i morsetti disposti nel verso opposto al precedente, col risultato di ribaltare
tale tensione e quindi di averla come positiva (se si fa una andata e un ritorno, il ritorno è percorso nel verso
opposto dell'andata). Nell'esempio in figura la sequenza potrebbe essere, indicando con il segno più i
conduttori che vengono considerati per esempio come entranti e con meno quelli come uscenti:
+1/-8/+3/-10/+5/-12/+7/-2/+9/-4/+11/-6/+1
Poiché in ogni conduttore si ha una tensione proporzionale alla velocità e al valore dell'induzione in quel
punto, ed avendo l'induzione andamento sinusoidale, si potrebbe immaginare di fotografare il sistema per
esempio quando il conduttore 1 si trova nella posizione α = 15° e i successivi sono distanti dal precedente
di 30° (in questo caso con 12 conduttori). Se 50 V fosse il valore della tensione sul conduttore in
corrispondenza della mezzeria della scarpa polare, si avrebbero le seguenti tensioni:
1
48 V
7
-48 V
2
35 V
8
-35 V
3
13 V
9
-13 V
4
-13 V
10
13 V
5
-35 V
11
35 V
6
-48 V
12
48 V
si nota quindi che la somma, utilizzando l'ordine indicato, diverrebbe:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 44 di 53
48-(-35)+13-13+(-35)-48+(-48)-35+(-13)-(-13)+35-(-48)=0
La tensione indotta in ogni conduttore dipende, con legge sinusoidale, dalla posizione del conduttore rispetto
all'asse di eccitazione:
e = eM ⋅ cos(α )
[8.25]
e quando il rotore ruota:
α = ωt ⇒ e = e(t ) = eM ⋅ cos(ωt )
[8.26]
Quindi la tensione in ogni conduttore potrebbe essere rappresentata in forma fasoriale, e la serie si ottiene
anche graficamente.
7
-12
-2
5
-10
9
H
K
-4
3
11
-8
-6
1
figura 8.6
Qui si nota che considerando solo la serie dei conduttori da -4 a +3 si ottiene una tensione positiva, uguale e
contraria a quella, complementare, dei conduttori da -10 a +9.
Il principio base della macchina in c.c. è proprio quello di prelevare tale tensione.
In questo esempio occorrerebbe prelevare tensione tra i morsetti uscente di 4 e entrante di 3 (o viceversa),
che coincidono con il morsetto entrante di 9 e uscente di 10. Il fasore HK rappresenta tale tensione.
Tuttavia, dopo un breve istante di tempo, il rotore ha compiuto una frazione di giro, la tensione HK ha la
componente reale già diminuita, seppure di poco; occorre allora prelevare da un'altra coppia di morsetti,
quella dei conduttori che, ruotando, si trovano dove erano prima 3 e 4.
La macchina in c.c. prevede allora che il prelievo di tensione sia fatto volta per volta dalla coppia di morsetti
opportuna, e che quindi da una coppia di morsetti i contatti elettrici passino alla successiva. Il fenomeno
prende il nome di commutazione ed è realizzato in maniera molto semplice: i morsetti dei conduttori sono
collegati ad una serie di lamelle, disposte sulla superficie laterale di un cilindro coassiale con il rotore e ad
esso solidale; le lamelle sono disposte sul cilindro in modo da essere parallele all’asse. Una coppia di
contatti, detti spazzole, realizzati in carbone, è invece fisso, solidale con lo statore. Girando, il rotore fa
ruotare anche il cilindro delle lamelle, di modo che affacciate alle spazzole sono lamelle sempre diverse,
ciascuna delle quali si ripresenta esattamente dopo un giro. In questo modo il contatto è assicurato volta per
volta con i morsetti opportuni, e girando si realizza la commutazione di cui sopra. Dopo ogni commutazione
una coppia di conduttori viene considerata con il verso opposto rispetto all'istante immediatamente
precedente alla commutazione stessa e quindi si impone ad essa di cambiare verso alla corrente. Spegnere
una corrente e riaccenderla con verso opposto è sempre una operazione problematica, per cui il
meccanismo delle spazzole e lamelle deve essere robusto e ben costruito.
Commutando, si preleva sempre una tensione prossima alla massima tensione possibile, ottenendo una
tensione pressoché costante, con solo lievi oscillazioni (peraltro filtrate dalle induttanze di dispersione,
sempre presenti in ogni circuito elettrico)
La corrente nei conduttori di rotore (corrente di armatura) percorre con un verso i conduttori nella metà
superiore e con il verso opposto i conduttori nella metà inferiore. In questo modo essa dà origine a sua volta
ad un flusso magnetico, che però sarà perpendicolare a quello di eccitazione. Tale flusso creerà sui
conduttori una ulteriore tensione, ma questa sarà in quadratura con la precedente e così la risultante ai
morsetti che via via si considerano sarà anch'essa in quadratura con la tensione di cui sopra. Quindi la
componente reale sarà nulla. Insomma, il flusso delle correnti di armatura non produce tensione ai morsetti
di prelievo; tuttavia tale flusso contribuisce alla saturazione del ferro e quindi può creare altri problemi, che
non verranno però trattati in questa sede.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 45 di 53
Per questa macchina vale allora (convenzione degli utilizzatori):
V = R ⋅ I + ω ⋅ M ⋅ Ie
Ve = Re ⋅ I e
Pelet = V ⋅ I = R ⋅ I 2 + ω ⋅ M ⋅ I e ⋅ I
[8.27]
Pmecc = ω ⋅ M ⋅ I e ⋅ I
C = Pmecc ω = M ⋅ I e ⋅ I
La prima equazione indica che la tensione misurata ai morsetti di armatura è dovuta in (piccola) parte alla
c.d.t. ohmica e in (gran) parte alla f.e.m. di cui si è discusso poco sopra, proporzionale alla velocità angolare
e al flusso (e quindi alla corrente) di eccitazione; tale f.e.m., spesso indicata con E , prende anche il nome,
quando la macchina funziona come motore, di forza controelettromotrice (f.c.e.m.).
La seconda equazione indica che sul circuito di eccitazione non ci sono tensioni indotte ma solo la c.d.t.
ohmica.
La terza equazione indica la potenza elettrica entrante; depurandola delle perdite sulla resistenza di
armatura si ottiene la potenza meccanica. Dividendo tale valore per la velocità angolare si ottiene la coppia
motrice.
In particolare di queste si utilizzano le equazioni:
V = R ⋅ I + ω ⋅ M ⋅ Ie
Ve = Re ⋅ I e
[8.28]
C = M ⋅ Ie ⋅ I
Nel funzionamento come generatore ("dinamo") il termine ω ⋅ M ⋅ I e è superiore alla tensione imposta, quindi
la corrente di armatura è negativa nella convenzione degli utilizzatori e quindi negativa anche la coppia
motrice, che diventa pertanto coppia resistente.
La macchina è quindi perfettamente reversibile.
La macchina in c.c. può essere configurata in diversi modi: con eccitazione serie, con eccitazione parallelo,
con eccitazione indipendente.
Nel primo caso (eccitazione serie):
Ie = I
V = (R + Re ) ⋅ I + ω ⋅ M ⋅ I
[8.29]
C = M ⋅I2
quindi:
I=
V
R + Re + ω ⋅ M
[8.30]
la corrente varia con legge iperbolica rispetto alla velocità.
Nel secondo caso (eccitazione parallelo):
Ve = V
V
Re
[8.31]
V ⋅ (1 − ω ⋅ M Re )
R
[8.32]
V = R ⋅ I + ω⋅ M ⋅
C = M ⋅I ⋅
V
Re
da cui:
I=
Nel terzo caso (eccitazione indipendente) valgono in generale le [8.28]; la tensione di eccitazione viene
regolata indipendentemente, in vari modi (reostati, dispositivi elettronici, etc.).
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 46 di 53
Va notato infatti che il termine di c.d.t. ohmica sulla resistenza di armatura è solitamente abbastanza piccolo,
dell'ordine di qualche punto percentuale, o frazione di punto per macchine di notevole potenza. Per esempio
se la tensione di alimentazione e pari a 1 p.u., la c.d.t. ohmica potrebbe essere pari a 0.05 p.u. e quindi la
f.c.e.m. a 0.95 p.u.; di conseguenza una variazione anche piccola della f.c.e.m., p. es. da 0.95 a 0.90,
comporta una variazione sensibile della c.d.t. ohmica, da 0.05 a 0.10, il che significa raddoppiare la corrente
di armatura. Si evince da questo esempio come sia necessario che la f.c.e.m. si mantenga sempre molto
prossima alla tensione di alimentazione. Essendo la f.c.e.m. proporzionale alla velocità di rotazione a alla
corrente di eccitazione, quando la macchina gira più lentamente occorre compensare aumentando la
corrente di eccitazione e quando gira più velocemente occorre diminuirla (questo può essere fatto bene con
l'eccitazione di tipo indipendente). Questo comporta variazioni sensibili anche di coppia, che è proporzionale
alla corrente di eccitazione e a quella di armatura. Una diminuzione della corrente di eccitazione potrebbe
essere compensata, per conservare valori elevati di coppia, con un aumento della corrente di armatura che,
come appena visto, comporta solo una leggera diminuzione della f.c.e.m.. Tenere conto di tutte queste
relazioni tra i vari parametri non è un problema semplice e, acquisiti i principi fondamentali e la
consapevolezza del problema, ne rimandiamo una trattazione completa a corsi più specifici.
8.4 - La Macchina Asincrona o a Induzione
Questa macchina sarà oggetto di analisi un po' più approfondita perché il suo uso è molto comune
nell'impiantistica elettrica di ogni ordine di grandezza.
Il principio di funzionamento è abbastanza semplice.
Sullo statore, che non presenta particolari forme (cilindro regolare, fatto salvo per le cave) viene posto un
sistema di avvolgimenti trifase, con pp=1 ma anche superiore (molto diffuse la macchine con pp=2, 3, 4), che
genera un campo rotante o meglio una induzione con distribuzione sinusoidale (rispetto alla posizione e
rispetto al tempo) sul traferro, come descritto dalle equazioni [8.11] e [8.20].
Il rotore è anch'esso un cilindro regolare e presenta un sistema di avvolgimenti in cortocircuito. A rotore
fermo, gli avvolgimenti rotorici percepiscono quindi un flusso magnetico che varia con legge sinusoidale nel
tempo. Si genera quindi su di essi una f.e.m., ed essendo tali avvolgimenti chiusi in cortocircuito si presenta
un passaggio di corrente notevole. Questa corrente crea a sua volta un flusso che si oppone a quello dovuto
alla correnti statoriche e che ha lo stesso andamento nel tempo e lungo la circonferenza, di modo che il
flusso al traferro è la risultante dei due effetti. In pratica la macchina si sta comportando come un
trasformatore: il flusso al traferro corrisponde al flusso principale o flusso di eccitazione; tale flusso è
sostenuto da una corrente fittizia, pari alla differenza tra la corrente statorica e quella rotorica, che
corrispondono alla corrente primaria e secondaria. Si possono allora scrivere delle equazioni a rotore
bloccato:
V1 = (R1 + jω1L1 ) ⋅ I1 + E1
0 = −(R2 + jω1L2 ) ⋅ I 2 + E2
E1 =
[8.33]
N1
E2 = Z M ⋅ I M = Z M ⋅ (I1 − I 2′ ) = Z M
N2
Z
⎛
⎞
N
⋅ ⎜⎜ I1 − 2 I 2 ⎟⎟
N1 ⎠
⎝
Z
1
Z
2
CTO
CTO
M
figura 8.7
la prima equazione è l'equazione statorica (statore alimentato), la seconda rotorica (rotore in cortocircuito), le
terza evidenzia il trasformatore ideale e mostra come la tensione su tale trasformatore sia quella dovuta alla
corrente di eccitazione o corrente a vuoto.
Le tensioni del trasformatore ideale possono anche venire chiamate tensioni al traferro.
Le induttanze che appaiono nella prima e seconda equazione sono di dispersione e sono percorse da
correnti alla frequenza di alimentazione ω1.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 47 di 53
Passando in p.u., oppure riportando al primario (statore) le grandezze del secondario (rotore) mediante il
rapporto spire, il trasformatore ideale può essere eliminato, scrivendo semplicemente:
V1 = (R1 + jω1L1 ) ⋅ I1 + E1
0 = −(R2 + jω1L2 ) ⋅ I 2 + E2
[8.34]
E1 = E2 = Z M ⋅ I M = Z M ⋅ (I1 − I 2 )
a cui corrisponde il circuito equivalente nella figura:
Z
Z
1
Z
2
M
figura 8.8
Se il rotore è in movimento, le cose diventano un poco più complicate. Infatti il secondario ruota e quindi
almeno in parte "insegue" il campo rotante e così percepisce flussi che variano con un frequenza diversa da
quella di alimentazione. Tale frequenza è pari alla differenza tra la frequenza di alimentazione e quella
meccanica di rotazione (eventualmente moltiplicata per il paia-poli):
ω2 = ω1 − ( pp ) ⋅ ωm
[8.35]
Solitamente si introduce una variabile adimensionale, detta scorrimento:
s=
ω2
ω1
⇒
ωm =
ω1 − ω2
ω
= (1 − s ) 1
pp
pp
[8.36]
Tale grandezza assume valore s = 1 quando il rotore è fermo e valore s = 0 quando il rotore ruota a velocità
sincrona al flusso statorico, cioè nella condizione detta di sincronismo.
In condizioni di rotore in movimento la tensione secondaria al traferro, indotta da un flusso percepito con una
variazione più lenta, vale:
E2 =
ω2
E1 = s ⋅ E1
ω1
[8.37]
questa notazione fasoriale è impropria perché le tensioni sono a frequenza diversa e quindi non possono
essere rappresentate dallo stesso sistema di fasori. La relazione è però perfettamente legittima per quanto
riguarda i moduli.
Anche le correnti indotte sul rotore saranno a frequenza minore (ω2), e a tale frequenza minore genereranno
un flusso magnetico; tuttavia tale frequenza è minore solo nel riferimento rotorico; lo statore percepirà questo
flusso del secondario ad una frequenza che è la somma della frequenza con cui esso si muove nel rotore e
delle frequenza di rotazione meccanica (moltiplicata per il pp) del rotore stesso. L'induzione dovuta alle
correnti rotoriche pertanto, riportata al primario, è isofrequenziale all'induzione dovuta alla correnti statoriche
e quindi può sommarsi vettorialmente a questa per dare origine all'induzione e al flusso al traferro, che
ruotano sempre, nel sistema di riferimento statorico, alla frequenza di alimentazione.
Le equazioni di funzionamento in tali condizioni diventano allora:
V1 = (R1 + jω1 L1 ) ⋅ I1 + E1
0 = −(R2 + jsω1L2 ) ⋅ I 2 + s ⋅ E1
(
E1 = Z M ⋅ I M = Z M ⋅ I1 − I 2(1)
[8.38]
)
()
dove la corrente I 21 indica la corrente di rotore, ma riportandola, solo per quanto riguarda la frequenza,
alla frequenza di alimentazione: infatti il flusso da essa prodotto a frequenza ω2 nel rotore viene percepito a
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 48 di 53
frequenza ω1 nel riferimento statorico. Tale corrente riportata presenta pertanto lo stesso modulo di quella
effettiva, ma frequenza diversa.
Il sistema potrebbe essere riscritto modificando l'equazione rotorica, è cioè dividendola tutta per lo
scorrimento, riportando così tutto quanto nel riferimento alla frequenza di alimentazione:
V1 = (R1 + jω1L1 ) ⋅ I1 + E1
⎛R
⎞
0 = −⎜ 2 + jω1L2 ⎟ ⋅ I 2(1) + E1
⎝ s
⎠
(
E1 = Z M ⋅ I M = Z M ⋅ I1 − I 2(1)
[8.39]
)
Quindi, togliendo per comodità grafica l'apice
scritte come:
(1)
alla corrente rotorica riportata, le equazioni possono essere
V1 = (R1 + jX 1 ) ⋅ I1 + Z M ⋅ (I1 − I 2 )
⎛R
⎞
0 = −⎜ 2 + jX 2 ⎟ ⋅ I 2 + Z M ⋅ (I1 − I 2 )
⎝ s
⎠
[8.40]
Si noti che la resistenza, divisa per lo scorrimento, assume un valore maggiore di quello reale. In realtà
questo artificio matematico serve solo a rendere conto del fatto che la corrente di rotore è minore di quella
che ci si aspetterebbe se il flusso al traferro venisse percepito dal rotore alla frequenza di alimentazione.
Poiché tale flusso viene percepito sul rotore a frequenza minore, è minore la tensione al traferro percepita
dal rotore e quindi è minore la corrente. Nell'equazione rotorica [8.40] viene invece applicata proprio la
tensione di rotore come derivata di un flusso alla frequenza di alimentazione, quindi una tensione maggiore
di quella realmente percepita, e così la resistenza maggiorata fa tornare i conti per quanto riguarda il modulo
della corrente.
Per quanto riguarda la potenza dissipata sul secondario, il suo valore rimane sempre:
R2 ⋅ I 22
quindi è bene suddividere la resistenza secondaria in una parte che renda conto delle perdite ( R2 presa con
il suo valore originale) e in una parte che completi il valore previsto dall'artificio matematico di cui sopra:
R2
1− s
⎛1 ⎞
= R2 + R2 ⋅ ⎜ − 1⎟ = R2 + R2 ⋅
s
s
⎝s ⎠
[8.41]
quindi infine le equazioni elettriche di funzionamento sono:
V1 = (R1 + jX 1 ) ⋅ I1 + Z M ⋅ (I1 − I 2 )
Z M ⋅ (I1 − I 2 ) = (R2 + jX 2 ) ⋅ I 2 + R2
1− s
⋅ I2
s
[8.42]
a cui corrisponde il circuito equivalente:
R
1
X
X
1
R
X
M
M
2
R
2
R
2
11
S
figura 8.9
Il termine resistivo R2 ⋅ (1 − s ) s , che si presenta come un termine dissipativo, non corrisponde fisicamente
ad una sede di potenza dissipata, bensì rende conto della potenza meccanica che la macchina elettrica
cede al rotore. Quindi:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 49 di 53
1− s 2
I2
s
P
3R I 2 (1 − s ) s 3( pp )R2 I 22
Cm = m = 2 2
=
(1 − s )ω1 pp
ωm
sω1
Pm = 3R2
[8.43]
Il fattore 3 è dovuto al fatto che il sistema è trifase.
Si noti che a rotore fermo o, come si dice, allo spunto, lo scorrimento è unitario e quindi la coppia è diversa
da zero:
Cm (sp ) =
3( pp )R2 I 22
ω1
[8.44]
In condizioni di sincronismo si ha invece scorrimento nullo. A prima vista quindi la [8.43] indicherebbe una
coppia di valore infinito perché appare lo scorrimento al denominatore. In realtà anche la corrente rotorica
tende a zero al tendere a zero dello scorrimento (vedi circuito equivalente), quindi occorrerebbe fare un
passaggio al limite. Si fa prima a ragionare in termini fisici: la coppia si presenta per una interazione tra
correnti statoriche e correnti rotoriche; in sincronismo il circuito rotorico presenta resistenza infinita e quindi
non passa corrente (in realtà non è la resistenza che è infinita, ma la tensione al traferro che è nulla perché
non si percepisce variazione di flusso); quindi non si ha corrente rotorica; senza corrente rotorica non ci può
essere interazione con la corrente statorica e quindi non vi sono forze: in sincronismo la coppia è nulla.
Il funzionamento in sincronismo corrisponde al funzionamento a vuoto del trasformatore (corrente
secondaria nulla).
Al variare dello scorrimento è possibile tracciare una caratteristica coppia-scorrimento. Un esempio numerico
risulta forse più significativo:
VN = 380 / 220V
I1N = 25 A
f = 50Hz, pp = 2
Z1 = 0.2 + j 0.9Ω Z 2 = 0.3 + j 0.8Ω Z M = 0.1 + j 40.0Ω
L'impedenza al secondario è in valori fisici riportata al primario. Le grandezze possono essere ricalcolate in
p.u.:
Z N = 220 25 = 8.8Ω
Z1 = 0.0227 + j 0.102 Z 2 = 0.034 + j 0.091 Z M = 0.011 + j 4.545
si noti che l'impedenza del ramo di eccitazione è più piccola di quella di un trasformatore: questo perché la
presenza dei traferri nei circuiti magnetici richiede una corrente di eccitazione maggiore per avere lo stesso
flusso.
Con questi valori si può calcolare il valore della corrente secondaria in p.u. per ogni valore di scorrimento;
riportandola in valori fisici con la [8.43] si ottiene la coppia.
Il grafico nella pagina successiva mostra tale caratteristica con alimentazione a tensione nominale.
Per facilitare i calcoli il circuito può essere ridotto mediante Thevenin, ottenendo un equivalente
dell'alimentazione e dei rami Z1 e Z M :
Z
Z
1
V
Z
Z
2
V
M
eq
eq
figura 8.10
Nell'esempio si ha:
Veq = (0.9780 + j 0.0047 ) ⋅ V ;
Z eq = 0.0217 + j 0.100
quindi:
Versione 1.00 - ottobre 2010
A.A. 2010-2011
Z
2
G. Pasini
Corso di Impianti Elettrici Industriali
Veq ≅ V ;
1B - Approfondimenti di elettrotecnica
Z eq ≅ Z1
p. 50 di 53
[8.45]
Questo risultato non è casuale: è sempre vero che il circuito completo può essere sostituito con buona
approssimazione con uno semplificato:
Z
Z
1
2
V
R
2
1-S
S
figura 8.11
Ma anche utilizzando il più rigoroso circuito equivalente vale:
I2 =
Veq
(R
eq
I 22 =
) (
+ R2 s + j X eq + X 2
(sR
=
)
s 2Veq2
(
+ R2 + s 2 X eq + X 2
2
eq
)
[8.46]
)
2
=
s 2Veq2
(
)
2
2
s 2 Req
+ X eq
+ 2 X 2 X eq + X 22 + s ⋅ 2 Req R2 + R22
=
[8.47]
s 2Veq2
As 2 + Bs + C
quindi, moltiplicando tale valore, che è in p.u., per il quadrato della corrente nominale per ottenere i valori
fisici:
Cm =
3( pp )R2 ⋅ sVeq2 ⋅ I N2
(
ω1 ⋅ As 2 + Bs + C
)
[8.48]
Corrente assorbita (statore) e coppia elettromagnetica risultante da questo modello sono rappresentabili con
le seguenti figure 8.12 e 8.13.
Per quanto riguarda la corrente:
6.00
5.00
].
u
.
p
[ 4.00
a
ic
r
o
t 3.00
a
t
s
e
t
n
e
rr 2.00
o
c
1.00
0.00
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
velocità meccanica [p.u.]
figura 8.12: corrente assorbita dal motore asincrono in funzione della velocità di rotazione
Si noti quindi che allo spunto il motore assorbe una corrente molto elevata, tipicamente pari a 4÷6 volte la
corrente nominale. Questa corrente è prevalentemente reattiva (il circuito equivalente è in chiuso in
cortocircuito al secondario, la corrente è limitata solo dalle resistenze degli avvolgimenti e dalle reattanze di
dispersione.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 51 di 53
E' importante tenere presente che, in caso di cortocircuito nella rete, ai morsetti di macchina dei motori,
questi ultimi si comporteranno transitoriamente da generatori, fornendo un contributo alla corrente di
guasto pari all'incirca alla corrente di spunto. Il motore si smagnetizza e smette di contribuire in poche
centinaia di ms, ma il suo contributo iniziale deve essere tenuto in conto nei calcoli di dimensionamento
dell'impianto.
Per quanto riguarda la coppia:
coppia elettromagnetica [p.u.]
2.50
2.00
1.50
1.00
0.50
0.00
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
velocità meccanica [p.u.]
figura 8.13: coppia elettromagnetica del motore asincrono in funzione della velocità di rotazione
Questa caratteristica (come la precedente, relativa alla corrente) è di tipo statico, nel senso che è valida in
regime permanente; una variazione per esempio della coppia resistente del carico meccanico
comporterebbe una variazione di velocità, e quindi di scorrimento, e quindi dei parametri del circuito
equivalente; pertanto tutte le variabili di stato, comprese quelle elettriche, dovrebbero superare un transitorio
prima di riassestarsi. In condizioni transitorie il circuito equivalente non è più valido (è valido in regime
P.A.S., ed è inoltre una rappresentazione monofase di un sistema trifase) e quindi non valgono le
espressioni della coppia. Va però notato che le variabili elettromagnetiche (le correnti, i flussi magnetici, etc.)
hanno costanti di tempo dell'ordine dei millisecondi, mentre il transitorio meccanico (variazione di velocità)
sarebbe molto più lento. Questo significa che le variabili elettriche si adeguano in fretta alle variazioni
meccaniche, mentre lo scorrimento si assesta più lentamente. La caratteristica che si ottiene è quindi valida
anche in condizioni di lenta variazione delle grandezze meccaniche.
Si nota che la caratteristica presenta un valore di spunto, poi la coppia aumenta gradualmente fino ad un
valore massimo, che si presenta per valori di scorrimento già abbastanza elevati (velocità meccanica
compresa tra 0.8 e 0.9 ovvero scorrimento tra 0.1 e 0.2); quindi ridiscende, anche con pendenza elevata,
fino al sincronismo. La curva si ripresenta simmetrica rispetto al punto di sincronismo per valori di
scorrimento negativo: in tali condizioni la macchina funziona come generatore. Su tale funzionamento
torneremo in seguito.
E' importante distinguere, nel tratto di funzionamento come motore, i due tratti della caratteristica: il tratto
dallo spunto fino al valore massimo, e il tratto dal valore massimo al sincronismo.
Il primo tratto è una condizione di funzionamento instabile. Si supponga infatti di avere equilibrio tra coppia
motrice e coppia resistente del carico. In caso di una perturbazione, per esempio un aumento della coppia
resistente, lo squilibrio comporta che la somma algebrica delle coppie assume un valore diverso da zero, in
questo caso negativo. Quindi la macchina tende a decelerare; la coppia motrice diminuisce ulteriormente,
quindi lo squilibrio aumenta, la macchina decelera ancora, e così via fino a fermarsi. Una diminuzione della
coppia resistente porterebbe invece ad una progressiva accelerazione fino a superare il punto di coppia
massima.
Il secondo tratto è una condizione di funzionamento stabile. In questo tratto una perturbazione negativa
come la precedente comporta sempre una decelerazione, ma decelerando la coppia motrice aumenta,
ripristinando l'equilibrio.
La macchina asincrona funziona quindi sempre nel tratto decrescente (a parte l'avviamento, in cui percorre
rapidamente l'altro tratto). Questo vuol dire tra l'altro che la macchina ruota a velocità abbastanza prossime
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 52 di 53
al sincronismo, con valori di scorrimento abbastanza piccoli; essendo la caratteristica molto ripida, variazioni
sensibili di coppia resistente comportano variazioni solo piccole di velocità meccanica. La macchina
asincrona quindi si adegua molto bene al carico meccanico. E' la macchina ideale per muovere ventole,
pompe, compressori, seghe circolari, utensili vari, etc., che richiedano una velocità di rotazione pressoché
costante ma che possono presentare coppie resistenti molto variabili.
Lo scorrimento nominale è invece quello in cui la corrente assorbita, con alimentazione a tensione nominale,
è pari alla corrente nominale, quindi, dalla [8.47], quando:
s 2 ⋅12
= 12
2
A⋅ s + B ⋅ s + C
⇒
( A − 1) ⋅ s 2 + B ⋅ s + C = 0
[8.49]
dove si fanno le approssimazione di avere le corrente di rotore pari a quella di statore e la tensione Veq pari
alla V (circuito equivalente senza ramo derivato).
Noto lo scorrimento nominale, tutti i parametri circuitali sono noti e quindi si possono definire anche: coppia
nominale, perdite e rendimento nominali, potenza reattiva nominale o, più comunemente, cos ϕ nominale.
Il sincronismo è raggiungibile solo teoricamente, perché in tale condizione non esiste coppia motrice;
potrebbe essere raggiunto, in tempo infinito, solo se il carico non presentasse alcuna coppia resistente (e la
macchina fosse priva di perdite meccaniche, che invece sono sempre presenti per attriti e ventilazione).
Solitamente la coppia resistente (caratteristica del carico) è del tipo:
2
Cr = α + β′ωm2 = α + β ⋅ (1 − s )
[8.50]
Data una caratteristica di carico e data la tensione di alimentazione, è possibile trovare il punto di lavoro:
3( pp )R2 ⋅ sVeq2 ⋅ I N2
(
ω1 ⋅ As 2 + Bs + C
) = α + β ⋅ (1 − s )
2
[8.51]
L'equazione è di 4° grado; va risolta per via numerica. Una strada molto semplice è la seguente, che
prevede iterazioni successive e in ogni iterazione un valore costante di coppia resistente:
iterazione 0:
s (0 ) = 0
(
Cr(0 ) = α + β ⋅ 1 − s (0 )
)
[8.52]
2
iterazione 1:
3( pp )R2 ⋅ s(1)Veq2 ⋅ I N2
(
)
C ( ) = α + β ⋅ (1 − s ( ) )
ω1 ⋅ As(21) + Bs(1) + C
1
r
(0 )
= Cr
⇒
As(21)
⎛
3( pp )R2 ⋅ s(1)Veq2 ⋅ I N2
⎜
+ B−
⎜
ω1 ⋅ Cr(0 )
⎝
⎞
⎟ s(1) + C = 0
⎟
⎠
[8.53]
1 2
iterazione 2:
etc.
Ogni iterazione consiste solo nella soluzione di una equazione algebrica di 2° grado. Si ripete fin quando non
si arriva a convergenza, cioè fin quando il valore trovato di scorrimento non subisce più variazioni
significative. Attenzione: essendo il risultato un valore molto piccolo ( 0.005 ÷ 0.050 ) è opportuno utilizzare
parecchie cifre decimali (almeno 4 o 5 cifre).
Si nota che, poiché la velocità di funzionamento è sempre prossima al sincronismo, il valore della coppia
resistente e della potenza meccanica assorbita dal carico sono pressoché costanti per variazioni anche
sensibili della tensione. Questo significa che, a differenza di un bipolo passivo (resistenza), la macchina
asincrona assorbe una potenza attiva pochissimo dipendente dalla tensione.
Esercizio:
data la macchina di cui sopra, a) trovare scorrimento nominale e tutti i valori nominali
conseguenti; b) supporre un carico resistente in cui α = β = 0.5CmN e trovare il punto di
lavoro, l'assorbimento di corrente, le perdite, etc.
Versione 1.00 - ottobre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1B - Approfondimenti di elettrotecnica
p. 53 di 53
Dal punto di vista costruttivo, basti sapere che il rotore raramente ha un vero e proprio sistema di
avvolgimenti, quanto piuttosto una serie di sbarre costruttrici chiuse in cortocircuito tra di loro ai due estremi
del cilindro rotorico mediante anelli conduttori. Questa configurazione si chiama a gabbia di scoiattolo
(squirrel cage).
Può inoltre servire sapere che esistono macchine con un numero di poli elevato, e con possibilità di
collegare in vario modo i gruppi di conduttori nei vari settori della circonferenza in modo da avere il massimo
numero di pp oppure un sottomultiplo. Per esempio con pp=12 è possibile avere, se la macchina è
predisposta per questo, pp=12, pp=6, pp=4, pp=3, pp=2, pp=1. A queste possibilità corrispondono velocità di
sincronismo di 250, 500, 750, 1000, 1500, 3000 g/min. Il sistema è utilizzato molto nella trazione elettrica (in
Italia la trazione ferroviaria è in c.a. solo in Sardegna e nelle linea TAV), per avere una regolazione di
velocità (regolazione discreta, cioè a scalini). Questi sistemi sono però superati dalla moderna tecnologia
dell'elettronica di potenza che permette di ottenere tensioni di alimentazione con frequenza regolabile.
La macchina asincrona funziona anche come generatore. Per valori di scorrimento negativi la coppia motrice
è negativa, cioè è coppia che si oppone al moto. La macchina assorbe potenza meccanica e la trasforma in
energia elettrica. A differenza della macchina sincrona non esiste pero un flusso di eccitazione che induca
negli avvolgimenti statorici una tensione con frequenza prefissata. Se venisse posta in rotazione da un
motore primo, a morsetti aperti o richiusi su un bipolo passivo, la macchina asincrona non erogherebbe
alcuna corrente: il rotore sarebbe solo un pezzo di ferro con qualche pezzo di rame che ruota a vuoto.
Occorre dall'esterno una sorgente di f.e.m. che ecciti i circuiti; solo in questo modo si potranno presentare
correnti rotoriche e quindi flussi al traferro, etc. Così pure occorre una sorgente di tensione in cui la
frequenza sia prefissata; solo in questo modo si può instaurare una differenza (asincronismo) tra la velocità
di rotazione del flusso al traferro e la velocità di rotazione del rotore. Quindi la macchina asincrona è usata
come generatore complementare entro impianti dove la maggior parte della potenza è erogata da macchine
sincrone; oppure il funzionamento come generatore è occasionale da parte di macchine che normalmente
funzionano come motori (per esempio un ascensore: in salita la macchina è motore, in discesa può essere
generatore).
La macchina asincrona è di sua natura trifase. Ma è possibile costruire anche macchine asincrone monofasi.
Un avvolgimento monofase non realizza un campo rotante, ma semplicemente un campo alternato
monodirezionale. Tuttavia questo può essere visto come la sovrapposizione di due campi rotanti con velocità
di rotazione uguali e contrarie. Un rotore in movimento presenterebbe quindi due scorrimenti:
s+ =
ω1+ − pp ⋅ ωm ω1 − pp ⋅ ωm
=
ω1
ω1+
(
)
[8.54]
ω− − pp ⋅ ωm − ω1 − pp ⋅ ωm − ω1 − 1 − s + ω1
s = 1
=
=
= 2 − s+
− ω1
− ω1
ω1−
−
Al secondo scorrimento compete una coppia che va considerata di segno opposto a quello positivo. Tale
coppia si ottiene prolungando la caratteristica meccanica anche a sinistra dell'asse verticale ωm = 0 e
capovolgendola; si ottiene una curva che decresce allontanandosi da tale asse verso valori negativi di
velocità meccanica.
Allo spunto s + = 1 = s − e quindi le due coppie sono uguali e contrarie, annullandosi a vicenda; in condizioni
nominali s + è molto piccolo mentre s − è prossimo a 2, quindi la coppia che gli compete è molto piccola. La
coppia risultante è quindi positiva.
La macchina quindi non è autoavviante. Occorrerebbe un motore di lancio, ma questo non è pensabile
perché se si fa una macchina monofase è proprio per semplicità di utilizzo (basse potenze, utilizzo
domestico). Si risolve il problema ponendo un secondo avvolgimento in quadratura con il primo. Se questo
crea un flusso (anche di entità minore) e se si riesce a sfasare la corrente in tale avvolgimento ponendovi in
serie un elemento capacitivo, il campo che si ottiene non è proprio rotante in modo da descrivere una
circonferenza perfetta come il trifase, ma non è più nemmeno monodirezionale: è ellittico, e tanto basta per
avere un po' di coppia di spunto.
*
Versione 1.00 - ottobre 2010
*
*
A.A. 2010-2011