Manuale di istruzioni
Mini Maestro
Convertitore
Convertitore a velocità variabile
per servomotori a magneti permanenti
Part Number: 0470-0006
Issue Number: 2
1
Dati
Ingresso riferimento analogico di velocità
±10V (impedenza d’ingresso 33 kΩ)
Ingresso riferimento analogico di corrente
±10V 22 kΩ (TPRC)
Segnale di abilitazione
Minimo:
10V
Massimo: 30V
impedenza d’ingresso 20 kΩ
Deriva in temperatura dell’amplificatore d’errore
±25 µV/°C
Offset dell’amplificatore d’errore
Offset a 25°C
±100 µV
Campo di controllo della reazione con dinamo tachimetrica
da 1 a 5000 giri/min
Minimo segnale della dinamo tachimetrica alla massima velocità
5V
Campo di controllo della reazione d’armatura
150 ÷ 3000 giri/min
Temperatura ambiente
Campo della temperatura di funzionamento:
da –10°C (50°F) a +45°C (113°F)
Alimentazione in corrente continua
Batteria:
Nominale:
Minimo 24V
Massimo 72V
60V
Alimentazione alternata raddrizzata:
Minimo 20V
Massimo 80V
Ondulazione massima:
2V da picco a picco
Mini Maestro Convertitore
Issue code: MINI1
1
Tensioni di servizio
±10V 3 mA massimi
Monitoraggio della corrente del motore
±8V
Monitoraggio della corrente richiesta dal motore (TPRC)
±10V
Cavi d’alimentazione
2
2.5 mm (AWG 14) per i modelli unità DCD 10/20 e unità DCD box 14/28
2
1.5 mm (AWG 16) per i modelli unità DCD 3/6 e unità DCD 7/14
Cablaggi di segnale
2
0.5 mm (AWG 20)
Valori d’uscita
Modello
Corrente
nominale
Corrente di
picco
DCD 60 ×3/6
da 1 a 3 A
6 A per 2 s
DCD 60 × 7/14
da 2 a 7 A
14 A per 2 s
DCD 60 × 10/20
da 3 a 10A
20 A per 2 s
DCD 60 ×14/28
da 5 a 14 A
28 A per 2 s.
Nota
La corrente di picco può essere regolata dal 50 % al 100 %
usando il resistore RIP montato su SK1.
La corrente nominale può essere regolata nel campo
indicato usando il resistore RIN montato su SK1.
Tolleranza della corrente
±10%
Protezione
Sovratemperatura sul radiatore:
Sottotensione:
Sovratensione:
2
100°C
20V
80V
Mini Maestro Convertitore
Issue code: MINI1
2
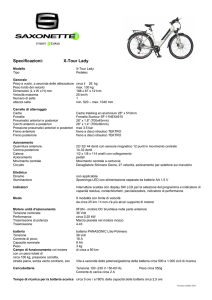
Installazione meccanica
2.1
Dimensioni dell’azionamento
A
B
C
D
Dimensioni dell’azionamento
15
A
100
3 /16
B
160
6 /16
C
8
D
41
Figura 1
Mini Maestro Convertitore
Issue code: MINI1
5
5
/16
5
1 /8
Dimensioni globali dell’azionamento
3
2.2
Posizione di montaggio
Rischio di shock elettrico
Attenzione
Il radiatore dell’azionamento è sotto tensione. Togliere
l’alimentazione ed attendere almeno 10 secondi prima di
toccare qualsiasi parte dell’azionamento.
L’azionamento è contenuto in una scheda Eurocard con un connettore a 64
terminali. Due kit d’installazione consentono le seguenti installazioni.
Kit d’installazione
Codice
componente
Installazione
3MB
7500 - 0009
Rack standard da 19 pollici
2MH
7500 - 0008
Montaggio su pannello
La classe di protezione dell’ingresso dell’azionamento è IP00. Se è richiesta
una protezione maggiore, installare l’azionamento in un armadietto.
Scegliere un posto libero da eccessiva polvere, vapori corrosivi, gas e ogni
liquido, compresa la condensa d’umidità atmosferica.
Se è possibile che si formi condensa quando l’azionamento non è in uso,
installare un riscaldatore anti-condensa. Detto riscaldatore dev’essere
spento quando l’azionamento è in uso; si raccomanda lo spegnimento
automatico.
Per il miglior flusso dell’aria di raffreddamento, installare l’azionamento in
modo che le alette del radiatore siano verticali.
Se l’azionamento dev’essere montato direttamente sopra qualsiasi
apparecchiatura che genera calore (come un altro azionamento), rispettare i
requisiti di temperatura ambiente. Se la temperatura ambiente supera 50°C
(120°F), occorre ridurre la potenza d’uscita dell’azionamento. L’azionamento
è dotato di una protezione di temperatura che fa andare in trip
l’azionamento quando il radiatore raggiunge 100°C (212°F).
4
Mini Maestro Convertitore
Issue code: MINI1
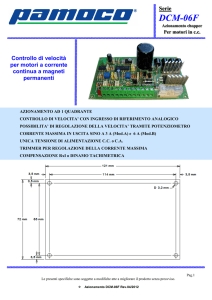
Portata d'aria = 1.5 m3/s
Portata d'aria = 1.0 m3/s
Convezione naturale
Temperatura°C
Massima
Figura 2
Riduzione con la temperatura della massima corrente d’uscita
Se l’azionamento dev’essere installato immediatamente sotto un’altra
apparecchiatura (come un altro azionamento a velocità variabile), garantire
che l’azionamento non faccia superare i limiti di temperatura ambiente
dell’apparecchiatura.
Lasciare uno spazio adeguato attorno all’azionamento in modo da non
impedire il flusso d’aria sul radiatore.
Per il modello DCD60x14/28, applicare un raffreddamento forzato, usando un
ventilatore ed un armadietto di dimensioni appropriate.
La potenza totale dissipata come calore da un azionamento, dall’induttanza,
dal trasformatore e dai radiatori va dal 10 al 15% della potenza del motore.
Mini Maestro Convertitore
Issue code: MINI1
5
Dimensione
pollici
9
a
40
1 /16
b
26
1 /4
c
7
1
d
8
5
e
130
f
20
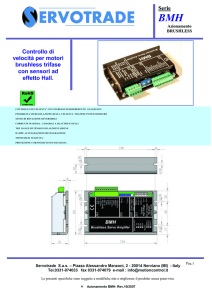
Figura 3
6
mm
1
/4
/16
1
5 /8
3
/4
Dimensioni del kit d’installazione 3MB per montaggio su rack
Mini Maestro Convertitore
Issue code: MINI1
Dimensione
a
pollici
9
66
2 /16
15
9
c
8
5
d
132
b
e
Figura 4
2.3
mm
/16
/16
3
5 /16
3
5
/16
Dimensioni del kit d’installazione 2MH per montaggio a pannello
Induttanza (opzionale)
Se un motore ha un’induttanza propria inferiore ad 1 mH, si deve inserire
un’induttanza tra il motore e l’azionamento, il più vicino possibile
all’azionamento. Per le dimensioni dell’induttanza fare riferimento alla
Figura 5.
Modello
Induttanza
Caratteristiche
dell’induttanza
DCD60x3/6
DCD60x7/14
L11
0.7 mH, 8A
DCD60x10/20
DCD60x14/28
L12
1 mH, 14A
Mini Maestro Convertitore
Issue code: MINI1
7
L12
Dimensioni
L11
mm
pollici
mm
pollici
2 /16
3
75
2 /16
1
/2
87
3 /16
1
7
3
75
2 /16
1
100
3 /16
a
56
b
12
c
64
2 /2
d
56
2 /16
e
64
2 /2
f
6
1
15
7
1
/4
15
15
5
/4
8
1
44
1 /4
44
1 /4
13
60
2 /8
/8
4
g
52
2 /16
h
40
1 /16
j
11
k
46
Diametro fori
4
Figura 5
8
L12
9
/16
3
3
7
/16
1 /16
1
3
1
/8
Dimensioni degli induttori L11 e L12
Mini Maestro Convertitore
Issue code: MINI1
3
Installazione elettrica
3.1
Collegamenti
Kit d’installazione
Uscita monitor corrente motore
Protezioni attive
TPRC
Comune segnali
Uscita alimentazione -10 V, 3 mA
Uscita alimentazione +10 V, 3 mA
Ingresso abilitazione
Ingresso (non invertente) riferimento di velocitá
Comune segnali
Ingresso (invertente) riferimento di velocitá
Ingresso (invertente) dinamo tachimetrica
Ingresso (non invertente) dinamo tachimetrica
Ingresso alimentazione +VDC
Ingresso alimentazione -VDC
Uscita al motore [M1]
Non usato
Uscita al motore [M2]
Connettore
Figura 6
Collegamenti di segnale e d’alimentazione nel kit
d’installazione 3MB
Mini Maestro Convertitore
Issue code: MINI1
9
Uscita monitor corrente motore
Abilitazione protezione
TPRC
Comune segnali
Uscita alimentazione -10 V, 3 mA
Uscita alimentazione +10 V, 3 mA
Ingresso abilitazione
Ingresso (non invertente) riferimento di velocitá
Comune segnali
Ingresso (invertente) riferimento di velocitá
Ingresso (invertente) dinamo tachimetrica
Ingresso (non invertente) dinamo tachimetrica
Ingresso alimentazione +VDC
Ingresso alimentazione -VDC
Uscita al motore [M1]
Uscita al motore [M2]
Connettore
Figura 7
Collegamenti di segnale e d’alimentazione nel kit
d’installazione 2MH
10
Mini Maestro Convertitore
Issue code: MINI1
Figura 8
Disposizione dei collegamenti di segnale e d’alimentazione nei kit
d’installazione
Mini Maestro Convertitore
Issue code: MINI1
11
Connettore dell’azionamento
Se si usa un kit d’installazione, non è necessario conoscere le funzioni dei
collegamenti sul connettore laterale. I collegamenti sono i seguenti:
Numero del
terminale AC
1
Comune segnali
2
Abilitazione protezione
3
TPRC
4
Tensione di servizio, –10V 3 mA
5
Tensione di servizio, +10 V 3 mA
6
Ingresso (non invertente) riferimento di velocità
7
Abilitazione azionamento
8
Comune segnali
9
Ingresso dinamo tachimetrica
10
Ingresso (invertente) riferimento di velocità
11
Imot Segnale analogico proporzionale alla corrente
efficace del motore.
14, 15, 16, 17
Ingresso alimentazione +DC
19, 20, 21, 22
Ingresso alimentazione –DC
24, 25, 26, 27
Uscita motore + [M1]
29, 30, 31, 32
Uscita motore – [M2]
12, 13, 18, 23, 28
3.2
Funzione
Da non usare
Messa a massa
Per evitare trip intermittenti dell’azionamento, usare un solo punto di massa
per i circuiti di alimentazione e di segnale. Si può usare una sbarra di massa di
dimensioni adeguate. Questa dev’essere montata su supporti isolati, più
vicina possibile all’azionamento e connessa alla massa del telaio con un cavo
2
2
tra 10 mm e 20 mm . Il cablaggio dev’essere più corto possibile.
Il collegamento al terminale del telaio del contenitore deve essere
adeguatamente dimensionato.
Nel dubbio, consultare il fornitore dell’azionamento.
12
Mini Maestro Convertitore
Issue code: MINI1
Azionamento 1
Azionamento 2
Controllo
Sbarra di massa
Alimentatore
Comune
alimentazioni
Comune segnali
Terminale telaio
armadietto
Armadietto
Figura 9
Massa
Collegamenti di massa
Nota
I cavi di segnale e d’alimentazione devono essere separati e
cablati in condotti diversi.
3.3
Alimentazione esterna
Per alimentare più azionamenti si può usare un’unica alimentazione esterna.
Corrente di
Usare un’alimentazione alternata monofase o trifase.
picco del
motore minore
di 15 A
Corrente di
picco del
motore di 15
A o più
Usare un’alimentazione alternata trifase.
Mini Maestro Convertitore
Issue code: MINI1
13
Fusibile secondario
Frm
Fsm
V2
V1
Alimentazione AC
Frm
Fusibili primario
Fusibili secondario
Fusibili primario
Condensatore Resistore
d'accumulo
di scarica
Fusibile secondario
Frt
Fst
V2
V1
Frt
V1
Fst
Frt
Alimentazione trifase
Figura 10
Circuiti di alimentazione monofase e trifase
Dimensionamento del trasformatore
Potenza
Usare la seguente equazione:
Pt = {(Paz × 1.7) + 80} × 1.73 ÷ √(n + 2)
Dove:
Paz = (Vm1 × Cm1) + (Vm2 × Cm2) + ...
Vm = Velocità del motore in radianti al secondo
(giri/min ÷ 9.5)
Cm = Coppia nominale in Nm
1.73 ÷ √(n + 2) = Fattore empirico di conversione per azionamenti
collegati in parallelo
Tensione
Scegliere, nel modo seguente, la tensione secondaria richiesta:
secondaria
del
trasformatore
14
Mini Maestro Convertitore
Issue code: MINI1
Alimentazione DC per
l’azionamento
63
Tensione secondaria Veff
45
24
17
80
56
A vuoto, V2 ≅ V1 × 1.4
A pieno carico, V2 ≅ V1 × 1.2
Condensatori di filtro
Per calcolare il valore totale richiesto della capacità d’accumulo, usare la
seguente equazione :
C = (Pt ÷ V2) × 2000 µF
Il coefficiente 2000 tiene conto della corrente di rigenerazione durante la
frenatura. Il coefficiente può essere ridotto a 1000, se sono soddisfatte
tutte le seguenti condizioni:
V2 = da 24 V a 45 V
Massima velocità del motore = 1500 giri/min
E’ usata un’alimentazione AC trifase
L’inerzia del sistema motore è minore di quella del motore
Nota
Se il LED verde Azionamento normale dell’azionamento si
spegne (anche temporaneamente) quando il motore viene
decelerato, vuol dire che sta intervenendo la protezione di
sovratensione. Per impedire questo intervento, aumentare
il valore della capacità di filtro.
Resistore di scarica
Il resistore di scarica garantisce che i condensatori di accumulo siano
scaricati in 19 secondi, quando l’alimentazione AC viene scollegata
dall’azionamento.
Per calcolare il valore richiesto, usare la seguente equazione:
R = 20 ÷ C
Per calcolare la potenza, usare la seguente equazione:
P = [V2]2 ÷ R
Mini Maestro Convertitore
Issue code: MINI1
15
Fusibili ritardati sull’alimentazione AC
Nei circuiti primario e secondario del trasformatore debbono essere inseriti
fusibili ritardati.
Per dimensionare i fusibili usare le equazioni che seguono:
Numero di fasi
Fusibili del primario
Fusibili del secondario
1
1.3 × Pt ÷ (VAC + 1)
Frm
1.6 × Pt ÷ V1
Fsm
3
0.75 × Pt ÷ (VAC + 1)
Frt
Pt ÷ V1
Fst
Fusibili sull’alimentazione DC
Nel portafusibile del pannello del kit d’installazione è montato un fusibile
rapido di 12,5. Questo protegge l’alimentazione DC dell’azionamento. Se
necessario sostituire questo fusibile con un fusibile rapido di 16A. Fare
riferimento alla tabella seguente:
DCD60x3/6
DCD60x7/14
12,5 A
3.4
12,5 A
DCD60x10/20
DCD60x14/28
16 A
16 A
Collegamenti del motore
Normalmente il motore dev’essere direttamente connesso al connettore del
kit d’installazione.
Se sussiste una qualsiasi delle seguenti condizioni, si deve inserire
un’induttanza su ogni uscita di un azionamento, come mostrato nelle Figure
11 e 12
• L’induttanza del motore è minore di 1 mH
• Nelle emergenze l’utilizzatore cortocircuita i terminali del motore
• Il rumore in alta frequenza dà problemi
• Il motore surriscalda (indipendentemente dall’induttanza del motore)
Azionamento
Figura 11
Induttanza
Collegamenti del motore e dell’induttanza
I due cavi tra l’azionamento e l’induttanza sono fonte di rumore. I cavi
devono essere più corti possibile (si raccomanda il valore di 300mm).
Il terminale 3 dell’induttanza dev’essere collegato al terminale + del motore.
Il terminale 5 dev’essere collegato al terminale - del motore.
Il terminale 4 dev’essere collegato alla sbarra di messa a massa.
16
Mini Maestro Convertitore
Issue code: MINI1
3.5
Collegamenti di segnale
Nota
I cavi di segnale e d’alimentazione devono essere separati e
cablati in condotti diversi.
No.
terminale
Descrizione
I/O
Note
1
IMOT
O
Segnale analogico proporzionale alla corrente efficace
del motore. Segnale d’uscita di ± 8V alla massima
corrente.
2
Protezione attiva
O
Uscita NPN a collettore aperto di 100mA, 47V. Usarla
per abilitare i dispositivi esterni di protezione quando
l’azionamento va in trip.
3
TPRC
I/O Segnale analogico proporzionale al valore della corrente
richiesta. Campo segnale ±10V. Quando vale ±10V
l’azionamento eroga la corrente di picco. Se lo si usa
come ingresso, e se si applica lo stesso campo di segnale,
l’azionamento diventa un generatore di corrente che
impiega la tensione applicata come riferimento di
corrente.
4
0V
5
Tensione di serv. –10V
O
3mA max
Comune segnali
6
Tensione di serv. +10V
O
3mA max
7
Abilitazione
I
Quando si applica a questo terminale un segnale DC da
10V a 30V, l’azionamento è abilitato. Quando il segnale
cessa, l’azionamento viene disabilitato (0V). Impedenza
d’ingresso = 47kΩ
8
Riferimento di velocità
(ingresso non
invertente)
I
Quando non è disponibile, da parte del controllore
esterno, un segnale differenziale, collegare il terminale
10 al terminale 9.
9
0V
Comune.
10
Riferimento di velocità
(ingresso invertente)
I
Al fine di minimizzare i problemi di rumore, l’ingresso del
segnale di riferimento di velocità è un ingresso
differenziale.
11
Tachimetrica
(ingresso non
invertente)
I
Segnale generatore tachimetrico.
12
Tachimetrica
(ingresso invertente)
I
Segnale generatore tachimetrico.
Mini Maestro Convertitore
Issue code: MINI1
17
Collegamenti dell’alimentazione DC per il 3MB
13
+DC
I
14
–DC
I
Collegamenti dell’alimentazione DC per il 2MH
13 + 14
+DC
I
15 + 16
–DC
I
Collegamenti del motore per il 3MB
15
Motore M1
16
Non
utilizzato
17
Motore M2
O
Positivo motore
O
Negativo motore
Collegamenti del motore per il 2MH
18
17
Motore M1
O
Positivo motore
18
Motore M2
O
Negativo motore
Mini Maestro Convertitore
Issue code: MINI1
4
Impostazioni dell’azionamento
Impostare l’azionamento regolando i potenziometri e sostituendo
determinati condensatori e resistori fissi. Questi componenti sono montati
sullo zoccolo SK1. Se si sostituisce un azionamento, lo zoccolo può essere
trasferito sull’azionamento di rimpiazzo, allo scopo di mantenere le
impostazioni.
4.1
Regolazione dei potenziometri
Cinque potenziometri sono così contrassegnati:
RAMP
DERIVATIVE
PROPORTIONAL
ZERO OFFSET
MAX SPEED
LED indicatori di stato dell azionamento
Punti di misura
Potenziometri
Figura 12
Mini Maestro Convertitore
Issue code: MINI1
Posizioni dei potenziometri sull’azionamento
19
Potenziometro RAMP
Regolare il potenziometro per variare da 0 a 2 secondi il tempo impiegato
dal motore per raggiungere la velocità massima (con un segnale di
riferimento della velocità di 10V). Per disabilitare le rampe ruotare il
potenziometro in posizione completamente antioraria.
Potenziometro
DERIVATIVE
Per ridurre l’entità di overshoot nella risposta del sistema, ruotare il
potenziometro in senso orario, aumentando così l’azione derivativa
dell’amplificatore PID.
Potenziometro
PROPORTIONAL
Per aumentare il guadagno proporzionale dell’amplificatore PID, ruotare il
potenziometro in senso orario.
Potenziometro ZERO
REF
Regolare questo potenziometro per annullare qualsiasi offset nel segnale
esterno di riferimento della velocità.
Potenziometro MAX
SPEED
Per ridurre la massima velocità del motore al 50%, ruotare il
potenziometro in senso antiorario.
4.2
Per aumentare la massima velocità del motore al 120%, ruotare il
potenziometro in senso orario.
Componenti montati
Figura 13
20
Posizioni dei componenti montati sull’azionamento
sull’azionamento
Mini Maestro Convertitore
Issue code: MINI1
I seguenti resistori e condensatori sono montati sullo zoccolo SK1:
Resistore RIP Riduce la corrente di picco al valore richiesto.
Resistore RAI Compensa la caduta di tensione dovuta alla resistenza interna del motore.
Resistore RIN Riduce la corrente nominale al valore richiesto.
Regola l’azionamento per la reazione di velocità con reazione d’armatura.
Resistore
RKW.CRA
Condensatore Regola l’azione derivativa.
DER
Condensatore Regola il guadagno integrale.
INT
Abilita il funzionamento dell’azionamento in modo di reazione d’armatura.
Cavallotto
JUMP.CRA
Resistore RT Normalizza il segnale d’ingresso del generatore tachimetrico e adatta
l’azionamento alla costante di tensione del generatore tachimetrico.
Nota
La maggior parte delle applicazioni non richiede l’uso di C1,
C2 o C3. Se l’applicazione ne richiede l’uso, i valori
raccomandati sono tra 0.1µ
µF e 5µ
µF.
4.3
Regolazioni dell’azionamento
Offset della velocità zero
Potenziometro ZERO
REF
1
2
3
4
5
6
Collegare l’ingresso non invertente del segnale di riferimento di
velocità al terminale 9 e l’ingresso invertente al terminale 10.
Impostare il segnale di riferimento di velocità per velocità zero.
Applicare da +10 a +30 V al terminale 7 Drive Enable.
Collegare un multimetro digitale ai terminali 11 e 12.
Abilitare l’azionamento e regolare il potenziometro ZERO REF per
ridurre la lettura a non più di 1 mV.
Ripristinare il cablaggio originale.
Velocità massima
Resistore RT
Nota
Come standard è montato un resistore RT di 10kΩ
Ω . Questo
valore è adatto alla costante di tensione della dinamo
tachimetrica Ke = 10Vx1000 rpm e ad una velocità massima
del motore = 3000 giri/min.
Per calcolare il valore del resistore RT, usare la seguente equazione:
RT = 400 [ ( Vm × Ke) − 5 Ω ]
Mini Maestro Convertitore
Issue code: MINI1
21
Dove:
Vm = Velocità massima del motore in giri/min ÷ 1000
Ke = Costante di tensione del generatore tachimetrico (tensione
d’uscita a 1000 giri/min ed in generale ke = V* 1000/giri/min
Caratteristiche del resistore:
Potenza: 0.25W
Tolleranza: +20%.
Nota
Se il valore calcolato per RT è zero, montare un ponticello
invece di un resistore.
Se il valore calcolato è negativo, affinché il motore
raggiunga la velocità richiesta, occorre sostituire la
dinamo tachimetrica con una che abbia un maggior valore
di Ke.
Esempio
Massima velocità richiesta = 3000 giri/min ∴ Vm = 3
Uscita generatore tachimetrico = 7V a 1000 giri/min ∴ ke = 7
Calcolare:
RT = 400 [(3 × 7) − 5 ] = 6.4kΩ
Il valore adatto più vicino è 6.8 kΩ.
Regolazione della corrente nominale
Se il valore nominale della corrente del motore è minore della corrente
nominale dell’azionamento, si può ridurre il valore massimo della corrente
generata dall’azionamento montando un resistore RIN. Fare riferimento alla
tabella seguente:
Modello
Corrente nominale
3/6
3,0
2,8
2,6
2,4
2,2
1,9
1,7
1,5
1,2
1,1
0,9
7/14
7,0
6,5
6,0
5,5
5,0
4,4
4,0
3,4
2,8
2,5
2,2
10/20
10
9,3
8,6
7,8
7,0
6,3
5,7
4,9
4,0
3,5
3,1
14/28
14
13
12
11
9,9
8,8
8,1
6,8
5,6
4,9
4,3
65
30
18
12
8.6
6.8
4.7
3.3
2.7
2.2
Valore kΩ
Ω
Per calcolare il valore del resistore RIN si usa la seguente equazione:
RIN =
(10,000 × INOM )Ω
[IPEAK - (2 × INOM)]
Dove:
INOM = valore nominale della corrente desiderata
IPEAK = valore della corrente di picco dell’azionamento
22
Mini Maestro Convertitore
Issue code: MINI1
Regolazione della velocità per il funzionamento in modo di reazione d’armatura
Cavallotto
JUMP.CRA
Resistore
RKW.CRA
Resistore RAI
Quando sul motore non è montato un generatore tachimetrico, si può
usare il modo di reazione d’armatura. Il controllo della velocità è allora
meno preciso. La velocità è controllata usando come reazione la tensione
del motore.
La caduta di tensione dovuta alla resistenza del motore piò essere
compensata variando il valore del resistore RAI.
1
Collegare il ponticello JUMP.CRA per abilitare il funzionamento
con reazione d’armatura.
2
Usare la seguente equazione per calcolare il valore corretto del
resistore RKW :
RKW = 260 × Vm × Ke
Dove:
Vm = Velocità massima in giri/min/1000
Ke = Costante di tensione del motore (tensione a 1000
giri/min — in generale V × 1000 giri/min)
Il calcolo del valore del resistore RAI può essere difficile perché è funzione
di quanto segue:
• Caratteristiche del motore (ad es. resistenza e temperatura
dell’armatura).
• Resistenza delle spazzole (che varia con il consumo)
Per calcolare un valore del resistore RAI, si può usare la seguente
equazione:
RAI = 80 × Vm ×
Ke
Ip
× Ratot
Dove:
Ip = Corrente d’uscita di picco
Ratot = Ra + Rsp1 + Rsp2
Ra = Resistenza d’armatura (Ω)
Rsp = Resistenza delle spazzole (Ω)
Si può trovare sperimentalmente un valore approssimativo usando un
valore del resistore RAI tra 400 kΩ e 600 kΩ.
Attenzione
Un valore troppo basso del resistore RAI può modificare la
risposta dell’anello di velocità. Per assistenza contattare la
Control Techniques.
Mini Maestro Convertitore
Issue code: MINI1
23
Regolazione della corrente di picco
Resistore RIP Se è montato un resistore RIN, IPEAK può diventare troppo alta rispetto alla
INOM. Per ridurre il valore della corrente di picco, usare un resistore RIP.
Nota
Se il valore di RIN è calcolato, si deve ignorare il nuovo
valore di IPEAK.
Per calcolare il valore del resistore RIP, usare la seguente equazione:
RIP =
(10 × ILIM )
(IPEAK - ILIM )
kΩ
Dove:
ILIM = il nuovo valore richiesto di IPEAK
Nota
Se si riduce la corrente di picco, si altera il rapporto tra
IPEAK e INOM. Questa alterazione aumenta il tempo prima che
2
intervenga la protezione I t.
In questo caso la corrente di picco è erogata per più di 2
secondi.
Al tabella che segue può essere usata per trovare un valore approssimato
di IPEAK.
Modello
3/6
4.4
Corrente
5,8
5,6
5,4
5,1
4,9
4,1
3,9
3,6
3,0
7/14
13,5
13,0
12,5
12,0
11,5
10,0
9,6
9,0
8,4
7,0
10/20
19,3
18,6
17,9
17,0
16,5
15,4
13,7
18,9
12,0
10,0
14/28
27
26
25
24
23
21
19
18
17
14
Valore
kΩ
Ω
270
130
83
56
47
33
22
18
15
10
Messa in fase del motore
Se i collegamenti del motore non sono corretti, il motore
può ruotare ad alta velocità in un senso qualsiasi.
Attenzione
24
Prima di provare il motore, scollegare il motore dalla
macchina, garantendo che l’alimentazione AC possa essere
rapidamente scollegata dall’azionamento.
Mini Maestro Convertitore
Issue code: MINI1
4.5
1
Assicurarsi che il segnale di riferimento della velocità sia zero.
2
Assicurarsi che non sia applicato un segnale di abilitazione
dell’azionamento.
3
Applicare l’alimentazione AC.
4
Verificare che il LED verde sia acceso e abilitare l’azionamento.
5
Verificare che il motore sia fermo o che ruoti lentamente.
6
Aumentare il segnale di riferimento della velocità e verificare che il
motore ruoti nel senso desiderato e che la velocità aumenti.
7
Se necessario, fare riferimento alla Diagnostica.
Calibrazione dinamica
Per modificare le impostazioni sono necessarie i seguenti strumenti:
Generatore di funzioni di bassa frequenza
Gamma di frequenza: da 0 a 10Hz
Tensione d’uscita: da –3.5 a +3.5V
Oscilloscopio a memoria con due tracce.
1
Togliere il segnale di riferimento di velocità dai terminali 9 e 10.
2
Collegare l’uscita del generatore di funzioni ai terminali 9 e 10.
3
Impostare come segue il generatore di funzioni:
Uscita ad onda quadra
Ampiezza: ±2V
Frequenza: 0,2Hz
4
Collegare il canale A dell’oscilloscopio al terminale 11.
5
Collegare il canale B dell’oscilloscopio al terminale 8.
6
Collegare la massa dell’oscilloscopio al terminale 9.
7
Collegare l’ingresso di trigger esterno dell’oscilloscopio all’uscita del
generatore di funzioni.
8
Impostare come segue l’oscilloscopio:
Sensibilità: 1mV per divisione
Base dei tempi: 20ms per divisione
Attenzione
Se il carico del motore è una slitta con corsa limitata,
evitare che la slitta attivi gli interruttori di limite,
aumentando la frequenza del segnale di riferimento o
diminuendo l’ampiezza del segnale di riferimento, al fine di
ridurre la velocità.
Mini Maestro Convertitore
Issue code: MINI1
25
Nota
L’ampiezza minima accettabile del segnale di riferimento è
di 1V da picco a picco.
9.
Applicare alimentazione all’azionamento.
10. Abilitare l’azionamento.
11. La forma d’onda può essere quella mostrata in Figura 14. In questo caso
il sistema ha un guadagno dinamico insufficiente. Ruotare in senso
orario il potenziometro PROPORTIONAL, fino ad ottenere una forma
d’onda senza oscillazioni.
V
Uscita generatore
di funzioni
t
V
Dinamo tachimetrica
t
Figura 14 Forma d’onda che risulta da un insufficiente guadagno
proporzionale
12. Se si è ottenuta una forma d’onda senza oscillazioni, nella maggior
parte dei casi la risposta presenterà un overshoot come mostrato in
Figura 19. In tal caso, il sistema ha una insufficiente azione derivativa.
Per eliminare l’overshoot, ruotare il potenziometro DERIVATIVE in
senso orario, come mostrato in Figura 20.
26
Mini Maestro Convertitore
Issue code: MINI1
V
Uscita generatore
di funzioni
t
V
Dinamo tachimetrica
t
Figura 15
Forma d’onda che risulta da un insufficiente guadagno differenziale
V
Uscita generatore
di funzioni
t
V
Dinamo tachimetrica
t
Figura 16
Mini Maestro Convertitore
Issue code: MINI1
Forma d’onda ideale
27
V
Uscita generatore
di funzioni
t
V
Dinamo tachimetrica
t
Figura 17
Forma d’onda che risulta da un eccessivo guadagno differenziale
Nota
Può essere necessario regolare ripetitivamente i
potenziometri PROPORTIONAL e DERIVATIVE.
Se l’azionamento ha problemi d’instabilità, dopo la
regolazione e quando è connesso ad un controllore di
posizione, regolare di nuovo i guadagni proporzionale e
derivativo.
Se il guadagno derivativo è impostato ad un valore eccessivo, si può
verificare del rumore di corrente. Ciò provoca un inutile riscaldamento
dell’azionamento e del motore, e può provocare dei trip di limite di
2
corrente I t.
La massima ampiezza accettabile del rumore di corrente è il 15% dell’ampiezza della forma
d’onda.
28
Mini Maestro Convertitore
Issue code: MINI1
Questa pagina è lasciata intenzionalmente vuota
Mini Maestro Convertitore
Issue code: MINI1
29
Connettore I/O (J2)
RT
9ac
1
13
16
DER
T
0.1uf
Rampe
15
4
Azione
differenziale
6ac
A1
INT
Velocitá
RIFERIMENTO
10 Volt
2
100
100K
14
3
Guadagno
proporzionale
10ac
0.047uf
7
10K
RAI
10
ABILITAZIONE
7ac
CIRCUITO DI CORRENTE
Test point
requested current
3ac
T.P.R.C.
Protezioni attive
Alimentazione
potenziometro
(Imax = 1 mA)
Limitatore
di
corrente
A2
2ac
10
5ac
10
4ac
RIP
Soglia
limitazione
corrente
8
1ac
Comuni
basse correnti
9
LED rosso
limitazione
corrente
8ac
6
RIN
11
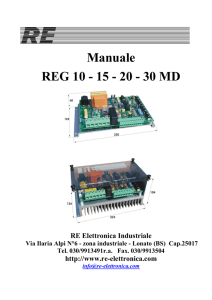
Figura 22
30
Schema a blocchi dell’azionamento
Mini Maestro Convertitore
Issue code: MINI1
LED verde
azionamento OK
Protezioni
reversibili
5
- sovratensione
RKW
- sottotensione
- sovratemperatura
12
Protezioni
irreversibili
- protezioni
stadio finale
A4
Guadagno
proporzionale
15V
25V
Alimentazioni
di servizio
14ac
15ac
16ac
17ac
24ac
25ac
26ac
27ac
Generatore
di PWM
Driver
stadio
finale
M
29ac
30ac
31ac
32ac
A3
Punto di misura
TP2 corrente motore
8 V = I A picco
TP1
Mini Maestro Convertitore
Issue code: MINI1
19ac
20ac
21ac
22ac
31
5
Diagnostica
Sull’azionamento sono disponibili quattro LED e due uscite digitali che
mostrano quanto segue:
Il monitoraggio dello stato dell’azionamento
La diagnostica
2
La protezione I t
5.1
Indicatori LED
Indicatore di protezione I2t
2
2
Il LED I t è acceso quando I t supera il valore programmato.
2
Quando il LED I t è acceso, l’azionamento genera il valore di corrente
nominale impostato con il resistore RIN.
2
L’intervento della protezione I t può essere provocato da:
Un ciclo di lavoro pesante con rapide e frequenti accelerazioni.
Inversione dell’azionamento.
Potenza inadeguata dell’azionamento.
2
Se non è attivata la limitazione I t, si accende il LED verde e viene generato
un segnale d’uscita Drive HEALTHY.
HEALTHY
Indicatore DRIVE HEALTHY
Il LED verde DRIVE HEALTHY indica che l’azionamento sta funzionando
regolarmente. Se il LED non è acceso, vuol dire che almeno una delle
funzioni di protezione è attiva.
5.2
Ricerca guasti
Quando il sistema, dopo la calibrazione, non funziona correttamente, usare
le seguenti procedure.
LED verde spento
Tensione
Verificare che la tensione d’alimentazione DC sia nel campo accettabile.
alimentazione
fuori campo
Protezione
azionamento
attivata
32
Verificare se vi è un cortocircuito tra i terminali del connettore
d’alimentazione.
Mini Maestro Convertitore
Issue code: MINI1
Il motore non è completamente controllabile
Cavi della
dinamo
tachimetrica
invertiti
Invertire i cavi della dinamo tachimetrica.
Cavi del
motore
invertiti
Invertire i cavi del motore.
Nessun
Verificare la dinamo tachimetrica ed i suoi cavi.
segnale della
dinamo
tachimetrica
sul terminale
11
Il resistore RT Calcolare il valore corretto del resistore RT, per regolare i componenti
non è
vedere Impostazioni dell’azionamento.
installato
Segnale di
Ridurre il segnale di riferimento di velocità a meno di 1mV.
riferimento
della velocità
Il motore ruota in senso inverso
Collegamenti Correggere i collegamenti del segnale di riferimento di velocità.
del segnale di
riferimento di
velocità
invertiti
Collegamenti Correggere i collegamenti del motore.
del motore
invertiti
Terminali dei
collegamenti
della dinamo
tachimetrica
invertiti
Correggere i collegamenti della dinamo tachimetrica.
Mini Maestro Convertitore
Issue code: MINI1
33
6
Accessori
DCD60x3/6
DCD60x7/14
Alimentazione AC monofase
Codice
Descrizione
Codice
componente
2MH
Kit d’installazione per montaggio su pannello, completo di fusibili e
cavo di collegamento
7500-0008
3MB
Kit d’installazione per montaggio su rack di 19 pollici, completo di
viti e fusibili.
7500-0009
Induttanza 0,7mH, 8A
4371-1108
L11
Raddrizzatore
a ponte
Raddrizzatore monofase a ponte 25A 400V
Condensatore elettrolitico 10.000µF 75V
1664-1000
DCD60x3/6
DCD60x7/14
Alimentazione AC trifase
Codice
Descrizione
Codice
componente
2MH
Kit d’installazione per montaggio su pannello, completo di fusibili e
cavo di collegamento
7500-0008
3MB
Kit d’installazione per montaggio su rack di 19 pollici, completo di
viti e fusibili.
7500-0009
Induttanza 0,7mH, 8A
4371-1109
L11
Raddrizzatore
a ponte
Raddrizzatore trifase a ponte 25A 400V
Condensatore elettrolitico 10.000µF 75V
1664-1000
DCD60x10/20
DCD60x14/28
Alimentazione AC trifase
Codice
Descrizione
Codice
componente
2MH
Kit d’installazione per montaggio su pannello, completo di fusibili e
cavo di collegamento
7500-0008
3MB
Kit d’installazione per montaggio su rack di 19 pollici, completo di
viti e fusibili.
7500-0009
Induttanza 1mH, 14A
4371-1214
L12
Raddrizzatore
a ponte
Raddrizzatore trifase a ponte 25A 400V
Condensatore elettrolitico 10.000µF 75V
34
Mini Maestro Convertitore
Issue code: MINI1
Norme sulla prevenzione degli infortuni
Le persone che sovrintendono ed eseguono l’installazione o la
manutenzione elettrica di un azionamento e/o della sua Unità
Opzionale esterna devono essere adeguatamente qualificate e
competenti in queste attività. Ad esse va data la possibilità di
studiare e, se necessario, di discutere questo Manuale prima
d'iniziare il lavoro.
Le tensioni che sono presenti nell’azionamento e nelle Unità
Opzionali esterne sono tali da infliggere gravi shock elettrici e
possono essere letali. La funzione di Stop dell’azionamento non
rimuove le tensioni pericolose dai terminali dell’azionamento e
dall’Unità Opzionale esterna. Occorre togliere le tensioni di rete
prima d'eseguire qualsiasi operazione di servizio.
Occorre attenersi alle istruzioni d’installazione. Qualsiasi
domanda o dubbio deve essere notificato al fornitore
dell’apparecchiatura. E’ responsabilità del proprietario o
dell’utilizzatore garantire che l’installazione dell’azionamento e
dell’Unità Opzionale esterna, ed il modo in cui sono impiegati ed
è eseguita la loro manutenzione, siano conformi a quanto
prescritto dallo Statuto sulle Norme di Sanità e di Sicurezza sul
Lavoro del Regno Unito e dalla legislazione, dai regolamenti e dai
codici di comportamento applicabili nel Regno Unito o in ogni
altro luogo.
Il software dell’azionamento può comprendere un sistema
d'autoavviamento. Allo scopo di prevenire il rischio di danni al
personale che lavora sul motore o nelle sue vicinanze o sugli
impianti da esso azionati, e d’impedire possibili danni agli
impianti, agli utilizzatori ed a chi ci lavora, devono essere prese
tutte le possibili precauzioni nell’impiego dell’azionamento in
questo modo.
Per garantire la sicurezza del personale non ci si deve affidare agli
ingressi di Stop e di Start dell’azionamento. Se può sussistere un
rischio di sicurezza a causa di un imprevisto avviamento
dell’azionamento, occorre installare un interblocco per impedire
che il motore si avvii inavvertitamente.
Informazioni generali
Il costruttore non accetta alcuna responsabilità per qualsiasi
conseguenza che possa derivare da un’installazione o da una
regolazione inappropriate, negligenti o non corrette dei
parametri di funzionamento opzionali dell’apparecchiatura o da
un errato accoppiamento dell’azionamento al motore.
Si ritiene che al momento della stampa il contenuto di questo
Manuale d’Impiego sia corretto. Nell’interesse del nostro impegno
in una politica di sviluppo e di miglioramento continui, il
costruttore si riserva il diritto di modificare, senza preavviso, le
specifiche del prodotto o le sue prestazioni, o il contenuto del
Manuale d’Impiego.
Tutti i diritti riservati. Nessuna parte di questo Manuale d’Impiego
può essere riprodotta o trasmessa in alcuna forma o in alcun
modo, elettrico o meccanico, comprese la fotocopia e la
registrazione, o con qualsiasi sistema d'immagazzinamento o di
reperimento d’informazioni, senza autorizzazione scritta
dell’editore.
Copyright © Novembre 1998
Control Techniques Drives Ltd
Codice dell’edizione: MINI2
Data dell’edizione: Novembre 1998
Indice
1
Dati
1
2
Installazione Meccanica
3
2.1
Dimensioni dell’azionamento
3
2.2
Posizione di montaggio
4
2.3
Induttanza (opzionale)
7
Installazione Elettrica
9
3
3.1
Collegamenti
9
3.2
Messa a massa
12
3.3
Alimentazione esterna
13
3.4
Collegamenti del motore
16
3.5
Collegamenti di segnale
17
4
Impostazioni Dell’azionamento
19
4.1
Regolazione dei potenziometri
19
4.2
Componenti montati
20
4.3
Regolazioni dell’azionamento
21
4.4
Messa in fase del motore
24
4.5
Calibrazione dinamica
25
5
Diagnostica
32
5.1
Indicatori LED
32
5.2
Ricerca guasti
32
6
Accessori
34