Com'è fatto un Computer?ComputerDexstex.
COMPONENTI DEL COMPUTER ( LA LORO DESCRIZIONE, IMMAGINI ,
VIDEO E TANTO ALTRO) LI POTETE TROVARE FACILMENTE QUA SOTTO.
CLICCATE sul componente desiderato!
1.
2.
3.
4.
5.
6.
7.
8.
9.
CPU
CPU
Alimentatore
Scheda Video
Hard Disk
RAM
Masterizzatore
Dissipatore
Ventola [Raffreddamento ad Aria]
WaterCooling [Raffreddamento a liquido]
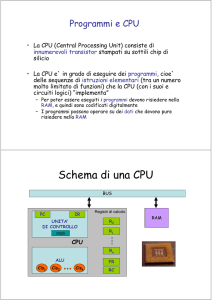
L'unità centrale di elaborazione, più conosciuta come CPU, è anche chiamata
processore,o microprocessore, è uno dei due componenti principali della macchina a
programma memorizzato di von Neumann, il modello su cui è basata la maggior
parte dei moderni computer.
Il compito della CPU è quello di eseguire le istruzioni di un programma (che deve
essere presente in memoria). Durante l'esecuzione del programma, la CPU legge o
scrive dati in memoria; il risultato dell'esecuzione dipende dal dato su cui si opera e
dallo stato interno in cui la CPU stessa si trova, è può mantenere la traccia delle
operazioni passate .
Famiglie di CPU
In base all'organizzazione della memoria si possono distinguere due famiglie di
CPU:
con architettura di von Neumann classica, in cui i dati e le istruzioni risiedono
nella stessa memoria (è dunque possibile avere codice automodificante).
Questa architettura è la più comune, perché è molto semplice e flessibile.
con architettura Harvard, in cui i dati e le istruzioni risiedono in due memorie
separate. Questa architettura può garantire prestazioni migliori poiché le due
memorie possono lavorare in parallelo riducendo le alee strutturali, ma è
ovviamente molto più complessa da gestire. È tipicamente utilizzata nei DSP.
Entrambe le architetture sono comunque architetture basate sui registri generali.
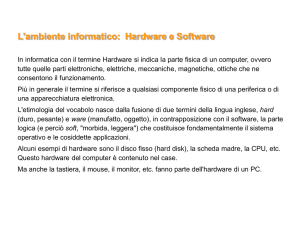
Struttura della CPU
Una generica CPU contiene:
una Unità di controllo CU (Control Unit) che legge dalla memoria le
istruzioni, se occorre legge anche i dati per l'istruzione letta, esegue
l'istruzione e memorizza il risultato se c'è, scrivendolo in memoria o in un
registro della CPU.
una ALU (Arithmetic Logic Unit) che si occupa di eseguire le operazioni
logiche e aritmetiche;
dei registri, speciali locazioni di memoria interne alla CPU, molto veloci, a
cui è possibile accedere molto più rapidamente che alla memoria: il valore
complessivo di tutti i registri della CPU costituisce lo stato in cui essa si trova
attualmente. Due registri sempre presenti sono:
il registro IP (Instruction Pointer) o PC (Program Counter), che contiene
l'indirizzo in memoria della prossima istruzione da eseguire;
il registro dei flag: questo registro non contiene valori numerici convenzionali,
ma è piuttosto un insieme di bit, detti appunto flag, che segnalano stati
particolari della CPU e alcune informazioni sul risultato dell'ultima
operazione eseguita. I flag più importanti sono:
Flag di stato:
Overflow: indica se il risultato dell'operazione precedente era troppo grande
per il campo risultato: 0 assenza di overflow, 1 overflow
Zero: vale 1 se l'ultima operazione ha avuto risultato zero, altrimenti vale 0.
Carry: vale 1 se l'ultima operazione ha ecceduto la capacità del registro che
contiene il risultato, altrimenti vale 0 (esempio: in un registro a 8 bit, che può
rappresentare solo numeri da 0 a 255, la somma 178+250 darebbe come
risultato 172, cioè 428 - 256, e il carry verrebbe posto a 1 insieme al flag di
overflow).
Segno: indica il segno del risultato dell'operazione precedente: 0 risultato
positivo, 1 risultato negativo
Flag di controllo:
o Interrupt: se a questo flag viene assegnato valore 1, la CPU smette di
rispondere alle richieste di servizio esterne delle periferiche (i segnali
delle linee IRQ) finché non viene ripristinato al valore 0, o finché non
arriva dall'esterno un segnale di RESET.
Oltre a queste unità possono esserne presenti altre, per esempio:
una FPU (Floating Point Unit) che si occupa di eseguire calcoli in virgola
mobile;
una MMU (Memory Management Unit) che si occupa di tradurre gli indirizzi
di memoria logici in indirizzi fisici, supportando la protezione della memoria
e/o uno o più meccanismi di memoria virtuale.
Una generica CPU deve eseguire i suoi compiti sincronizzandoli con il resto del
sistema: perciò è dotata, oltre a quanto sopra elencato, anche di uno o più bus interni
che si occupano di collegare registri, ALU, unità di controllo e memoria: inoltre
all'unità di controllo interna della CPU fanno capo una serie di segnali elettrici
esterni che si occupano di tenere la CPU al corrente dello stato del resto del sistema
e di agire su di esso. Il tipo e il numero di segnali esterni gestiti possono variare ma
alcuni, come il RESET, le linee di IRQ e il CLOCK sono sempre presenti.
Per quanto riguarda i registri, le CPU possono gestirli in molti modi: i più comuni
sono registri nominativi (CPU CISC classiche), file di registri (RISC) e stack di
registri (Transputer e simili).
Stack di registri: i registri sono organizzati in una struttura a stack (pila);
questa architettura ha il vantaggio di non dover specificare su quale registro
interno operare (è sempre quello in cima allo stack) ottenendo istruzioni più
corte e più semplici da decodificare. Il rovescio della medaglia è che nel caso
sia necessario un dato "sepolto" in fondo allo stack, il suo recupero è
un'operazione molto lenta.
Registri nominativi: ogni registro è identificato singolarmente e le istruzioni
che usano registri specificano di volta in volta quale registro devono usare.
Spesso alcuni registri sono dedicati a scopi particolari (registri indice,
accumulatori, registri di segmento ecc.) imponendo la non ortogonalità del set
di istruzioni (vedi oltre). La gran maggioranza delle CPU generiche degli anni
'70 e '80 è di questo tipo.
File di registri: I registri sono organizzati come una memoria interna della
CPU e indicizzati: la CPU "alloca" un certo numero di registri per ogni
processo e/o subroutine in esecuzione, eliminando la necessità di accedere alla
RAM per salvare gli stack di chiamata delle funzioni e i dati di task switching
nei sistemi multitask.
Una CPU è un circuito digitale sincrono: vale a dire che il suo stato cambia ogni
volta che riceve un impulso da un segnale di sincronismo detto clock, che ne
determina di conseguenza la velocità operativa, detta velocità di clock: quindi il
tempo di esecuzione di una istruzione si misura in cicli di clock, cioè in quanti
impulsi di clock sono necessari perché la CPU la completi. In effetti, una parte
importante e delicata di ogni CPU è il sistema di distribuzione che porta il segnale di
clock alle varie unità e sottounità di cui è composta, per fare in modo che siano
sempre in sincronia: tale sistema si dirama in una struttura ad albero con divisori e
ripetitori che giunge ovunque nella CPU. Nei processori più moderni (Pentium,
Athlon, PowerPC) questa "catena di ingranaggi" elettronica arriva ad impiegare circa
il 30% di tutti i transistor disponibili. La velocità di questa distribuzione determina
in maniera diretta la massima frequenza operativa di una CPU: nessuna CPU può
essere più veloce del suo critical path, cioè del tempo che impiega il clock per
percorrere il tratto più lungo in tutto l'albero di distribuzione del clock. Per esempio,
se il segnale di clock di una data CPU impiega un nanosecondo per attraversare tutto
il chip ed arrivare fino all'ultima sottounità, questa CPU potrà operare a non più di 1
GHz, perché altrimenti le sue componenti interne perderebbero la sincronizzazione,
con risultati imprevedibili (per avere un margine di sicurezza, il limite pratico sarà
anzi ben minore di 1GHz).
Set d'istruzioni macchina
Le istruzioni di una CPU (instruction set) sono semplicemente dei numeri, detti
opcode o codici operativi: in base al loro valore l'unità di controllo intraprende delle
azioni predefinite, come per esempio leggere la successiva locazione di memoria per
caricare un dato, oppure attivare la ALU per eseguire un calcolo, oppure scrivere il
contenuto di un registro in una certa locazione di memoria o in un altro registro,
oppure una combinazione di queste.
Per una persona, stendere programmi scrivendo direttamente gli opcode è
estremamente noioso e prono all'errore. Per questo motivo si utilizza l'assembly, che
associa un simbolo mnemonico ad ogni istruzione della CPU e introduce una sintassi
che permette di esprimere i vari metodi di indirizzamento in modo più intuitivo.
Una caratteristica importante dell'insieme (set) delle istruzioni di una CPU è la sua
ortogonalità: vale a dire, il fatto che ogni istruzione che usi i registri possa usarli tutti
indifferentemente (tranne quelli "speciali" come l'IP) e che nessun registro sia in
qualche modo privilegiato rispetto agli altri perché su di esso si possono compiere
operazioni particolari: è stato dimostrato che un set di istruzioni ortogonali, a parità
di tempo di esecuzione delle istruzioni e di numero dei registri, è più efficiente di
uno non ortogonale.
Ciclo del processore
Tipicamente la CPU è l'Interprete del linguaggio macchina. Come tutti gli interpreti,
si basa sul seguente ciclo:
Acquisizione dell'istruzione (Instruction Fetch): il processore preleva
l'istruzione dalla memoria, presente nell'indirizzo (tipicamente logico)
specificato da un registro "speciale" ("speciale" opposto di "generico"), il PC
Decodifica (Operand Assembly): una volta che la word è stata prelevata, viene
determinata quale operazione debba essere eseguita e come ottenere gli
operandi, in base ad una funzione il cui dominio è costituito dai codici
operativi (tipicamente i bit alti delle word) ed il codominio consiste nei brani
di microprogramma da eseguire
Esecuzione (Execute): viene eseguita la computazione desiderata. Nell'ultimo
passo dell'esecuzione viene incrementato il PC: tipicamente di uno se
l'istruzione non era un salto condizionale, altrimenti l'incremento dipende
dall'istruzione e dall'esito di questa
Questo ciclo elementare può essere migliorato in vari modi: per esempio, la
decodifica di una istruzione può essere fatta contemporaneamente all'esecuzione
della precedente e alla lettura dalla memoria della prossima (instruction prefetch) e
lo stesso può essere fatto con i dati che si prevede saranno necessari alle istruzioni
(data prefetch). La stessa esecuzione delle istruzioni può essere suddivisa in passi
più semplici, da eseguire in stadi successivi, organizzando la unità di controllo e la
ALU in stadi consecutivi, come delle catene di montaggio (pipeline''): in questo
modo più istruzioni possono essere eseguite "quasi contemporaneamente", ciascuna
occupando ad un certo istante uno stadio diverso della pipeline.
Il problema di questo approccio sono le istruzioni di salto condizionato: la CPU non
può sapere a priori se dovrà eseguire o no il salto prima di aver eseguito quelle
precedenti, così deve decidere se impostare la pipeline tenendo conto del salto o no:
e in caso di previsione errata la pipeline va svuotata completamente e le istruzioni in
corso di decodifica rilette da capo, perdendo un numero di cicli di clock direttamente
proporzionale al numero di stadi della pipeline. Per evitare questo i processori
moderni hanno unità interne (“Branch prediction unit”) il cui scopo è tentare di
prevedere se, data una istruzione di salto condizionato e quelle eseguite in
precedenza, il salto dovrà essere eseguito o no.
Inoltre i processori possono implementare al loro interno più unità di esecuzione per
eseguire più operazioni contemporaneamente. Questo approccio incrementa le
prestazioni delle CPU ma ne complica notevolmente l'esecuzione, dato che per poter
eseguire in modo efficiente più operazioni in parallelo la CPU deve poter
organizzare le istruzioni in modo diverso da come sono organizzate dal
programmatore (esecuzione fuori ordine). Una ulteriore evoluzione di questo
concetto è stata implementata nei processori multicore Itanium, che implementano
delle istruzioni predicative che possono o meno essere eseguite a seconda del
risultato di altre, eseguite in precedenza o contemporaneamente.
Alimentatore
Un alimentatore è un convertitore AC-DC, ossia un apparato elettrico semplice o
composto che serve a raddrizzare la tensione elettrica (da alternata AC a continua
DC) in modo da fornire energia elettrica adattandola all'uso di altre apparecchiature
elettriche.
Gli alimentatori differiscono ampiamente in funzione della potenza gestita, così
anche per le caratteristiche di qualità della corrente fornita all'uscita. Un alimentatore
con pari valori di tensione e potenza è più complesso e costoso quanto più la tensione
fornita è precisa e stabile, e quanto maggiore è la sua affidabilità. Esistono anche
alimentatori da laboratorio, in cui la tensione di uscita è regolabile a piacere
dall'utilizzatore in base alla necessità. Questi alimentatori hanno anche una
limitazione della corrente massima fornita, in alcuni casi regolabile, utile per evitare
problemi in caso di cortocircuito e per speciali circuiti con alimentazione in corrente
costante.
In molti casi l'alimentatore fornisce più di una tensione di uscita. È il caso degli
alimentatori per incubatrici, che forniscono tensioni di 9,3, ±32, ±100 V.
Un crescente numero di case costruttrici adotta la certificazione 80 Plus per verificare
la stabilità della tensione in uscita e la quantità di energia dissipata in calore, sotto
varie condizioni di carico dell'alimentatore.
Tecnologie
Principalmente ne esistono di due tipi:
1) Statici, cioè producono una tensione e un amperaggio di uscita sempre
uguale (sono molto diffusi)
2) Variablili, cioè possono modificare i valori di tensione e di amperaggio di
uscita tramite delle apposite levette o pulsanti.
Essi hanno una tensione minima e una massima di ingresso per operare. Un semplice
alimentatore può essere composto da 4 diodi messi in serie a formare un rombo
chiuso (Ponte di Graetz) dove i primi 2 sono collegati ai due cavi di corrente alternata
(1 fase e 1 neutro) e gli ultimi due sono collegati ai due cavi per la corrente continua
(1 positivo e 1 negativo)
A secondo della tecnologia utilizzata hanno anche un sistema che moltiplica la
frequenza della corrente e un diodo che scarica su un condensatore in modo tale che
la corrente continua in uscita sia il più "dritta" possibile.
Esistono due approcci tecnologici profondamente differenti per la realizzazione di
alimentatori:
Dissipativo o lineare
Si tratta di due tecnologie estremamente semplice ed economica, largamente usata
ove la potenza richiesta sia limitata ed il costo rappresenti un limite. Non mancano
tuttavia esempi di alimentatore di questo tipo che eroghino anche fino a 20 ampere di
corrente.
Un generico alimentatore lineare è idealmente (e spesso anche praticamente)
composto dai seguenti elementi collegati in cascata:
un trasformatore: provvede a ridurre (o in rari casi aumentare) la tensione
proveniente dalla rete elettrica per avvicinarla al valore richiesto dal carico da
servire.
un raddrizzatore: trasforma la corrente alternata fornita dal trasformatore in
corrente continua. Può essere a diodo singolo o a ponte di Graetz (dal nome del
suo inventore, il fisico tedesco Leo Graetz).
un filtro livellatore: livella la corrente unidirezionale pulsante uscente dal
raddrizzatore in una corrente più uniforme e costante. Solitamente
rappresentato semplicemente da un condensatore elettrolitico.
un circuito elettronico stabilizzatore detto anche regolatore, che può spaziare
da un semplice diodo zener ad un circuito integrato dedicato. Assicura che la
tensione generata dall'alimentatore si mantenga costante nel tempo ed entro
una stretta tolleranza rispetto al valore richiesto, al variare della tensione della
rete elettrica e del carico applicato.
In molti casi dove non occorra una tensione stabile e precisa, specialmente nei piccoli
alimentatori a spina, non è presente la sezione di stabilizzazione.
I principali limiti di questi alimentatori risiedono nel basso rendimento energetico,
che comporta, nel caso di elevate potenze gestite, un consistente sviluppo di calore,
che deve essere smaltito per evitare danni all'apparato.
Un altro limite è nell'eccessivo incremento di dimensioni e peso all'aumentare della
potenza di un alimentatore analogico,considerando l'elevato peso che ha un grosso
trasformatore di tensione.
Scheda Video
Una scheda video è un componente del computer che ha lo scopo di generare un
segnale elettrico (output) che possa essere mostrato a video (display). A seconda del
tipo di computer questo dispositivo può essere più o meno potente: i primi modelli di
scheda video potevano visualizzare solo testo; successivamente si sono diffuse anche
schede video in grado di mostrare output grafici (immagini non testuali) e,
recentemente, anche modelli tridimensionali texturizzati in movimento e in tempo
reale. Questi ultimi tipi di scheda provvedono anche ad elaborare e modificare
l'immagine nella propria memoria interna, mentre le schede 2D possono mostrare
immagini 3D solo con l'aiuto della CPU che deve eseguire da sola tutti i calcoli
necessari.
Le schede video possono essere collegate in diverso modo alla scheda madre
Integrate, la scheda video è ricavata direttamente sulla scheda madre, questa
soluzione viene utilizzata sulle console e su alcuni PC, per quest'ultimi, si può
avere o no la possibilità di utilizzare una scheda video esterna
PCI, porta parallela
AGP, porta parallela
Tipologia e architettura delle schede video
Una tipica scheda video contiene un integrato grafico (o più di uno) che
gestisce una certa quantità di RAM dedicata a memorizzare i dati grafici da
visualizzare e che risiede fisicamente sulla scheda stessa. Le schede video
costruite per i PC IBM e compatibili contengono anche una ROM con un
driver molto semplice (chiamato firmware che è aggiornabile nelle moderne
schede video), usato dal BIOS per il bootstrap.
Il funzionamento di una scheda video è, in linea di massima, molto semplice:
ogni locazione di RAM grafica contiene il colore di un pixel dello schermo, o
di un carattere se la scheda sta visualizzando solo testo: il chip grafico si
limita a leggere in sequenza le locazioni necessarie (se sta lavorando in modo
testo, ogni locazione viene elaborata da un generatore di caratteri) e a
pilotare un convertitore digitale-analogico, detto RAMDAC, che genera il
segnale video che sarà visualizzato dal monitor. Dalla quantità di RAM
grafica equipaggiata nella scheda e dalla velocità (frequenza) massima del suo
RAMDAC dipendono la risoluzione massima raggiungibile e il numero di
colori contemporaneamente visibili.
Tutte le schede video possono visualizzare anche grafica tridimensionale (al
limite anche quelle con sola modalità testo, se si accetta una rappresentazione
ASCII art), ma senza funzioni apposite di accelerazione. L'intero lavoro di
calcolo deve essere svolto, pixel per pixel, dalla CPU principale del computer,
che viene spesso completamente assorbita da questo compito: una scheda
grafica non tridimensionale si limita in pratica a visualizzare una serie di
immagini bidimensionali che le vengono inviate dal sistema.
Modo testo
.
Tutte le schede video dispongono almeno del modo di funzionamento detto modalità
testo o a caratteri: in questa modalità lo schermo del computer è organizzato come
una griglia di caselle rettangolari in ciascuna delle quali viene scritto un carattere
tipografico, di stile prefissato da un generatore di caratteri interno alla scheda
(generalmente una sezione del chip video che si occupa di leggere la descrizione dei
vari caratteri richiesti dalla ROM o da una parte della RAM video). Per esempio, nei
PC IBM originali il modo testo era di 80 colonne per 25 righe. Una parte della RAM
della scheda viene poi usata per memorizzare il codice (in genere in codice ASCII) di
un carattere tipografico.
In questa modalità, per far comparire sullo schermo la scritta "scheda video" è
sufficiente che il calcolatore scriva i dodici codici ASCII delle lettere componenti
(115, 99, 104, 101, 100, 97, 32, 118, 105, 100, 101, 111) in dodici locazioni della
memoria RAM della scheda video: sarà poi il generatore di caratteri del chip grafico
a tradurre i codici in serie di pixel e fare tutto il resto.
Modalità grafica
Quasi tutte le schede video (con pochissime eccezioni) possono poi operare anche in
modalità grafica, vale a dire senza avvalersi del generatore di caratteri interno ma
specificando l'immagine pixel per pixel. In questa modalità il colore di ogni pixel è
specificato singolarmente, in genere usando una o più locazioni di memoria video.
Questa modalità ha bisogno di molta più memoria RAM del modo testo: una
schermata in modo testo occupa generalmente da 2 a 6 KB di RAM video, mentre in
modalità grafica, a seconda della risoluzione in pixel e della quantità di colori usati
contemporaneamente serve da 10 a 10000 volte tanto. Il modo di rappresentare del
singolo pixel in memoria video varia molto a seconda del tipo di approccio usato dal
costruttore e dalla particolare modalità grafica: in genere però si adotta una
corrispondenza di tipo bitmap, cioè a mappa di bit.
Schede video con accelerazione 2D
Già da un po' di tempo il chip grafico è in grado di eseguire alcune funzioni grafiche
in modo autonomo, senza che il processore principale debba intervenire: le schede
grafiche con questi chip sono dette 2D accelerate, perché possono svolgere da sole
una parte del lavoro di disegno che altrimenti spetterebbe al processore. Le
operazioni più comuni da implementare in hardware sono il tracciamento di linee, di
archi e di forme geometriche semplici (rettangoli, poligoni, cerchi, ellissi) e il bit
blitting, cioè lo spostamento da una parte all'altra dell'immagine di blocchi di pixel.
È in genere presente anche un generatore di caratteri evoluto, capace di funzionare
anche in modalità grafica e di visualizzare contemporaneamente caratteri di molti
font e grandezze diverse.
Schede video con accelerazione 3D
.
Le schede video con capacità grafiche tridimensionali (o 3D accelerate) hanno le
stesse capacità bidimensionali delle precedenti, e in più ne hanno una completamente
nuova, la modalità 3D appunto, in cui i pixel dell'immagine da visualizzare vengono
calcolati dalla GPU (Graphics Processing Unit), fotogramma per fotogramma,
partendo da una serie di dati geometrici forniti dalla CPU.
In questa modalità, la RAM video contiene una serie di sottoimmagini, le texture.
Ciascuna di queste viene associata ad una particolare superficie bidimensionale di
un modello tridimensionale di cui ne costituisce la "pelle": volendo, si possono
considerare le varie texture come delle carte da parati elettroniche. Per ogni
fotogramma (frame) da visualizzare in modalità 3D, la scheda video riceve dal
processore una serie di punti geometrici (vertici) che specificano delle superfici in
uno spazio tridimensionale con l'indicazione di quali texture applicare alle varie
superfici: la GPU si occupa di calcolare, a partire dai dati ricevuti, se la particolare
superficie sia visibile o no, e, se visibile, la sua forma in due dimensioni (coordinate
schermo); poi si occupa di applicare la (o le) texture indicate. Il valore di ogni pixel
viene quindi calcolato a partire da quali e quanti texel (i pixel delle texture) sono
contenuti in esso.
Per fare tutto questo, le schede video 3D accelerate sono equipaggiate con una
grande quantità di RAM, e ricorrono in modo massiccio al calcolo parallelo:
l'integrato principale è un vero e proprio processore e viene detto GPU (anche
programmabile a piacere, a partire dalla serie 6800GT di Nvidia), composto
internamente di una serie di unità identiche (dette pipeline) operanti in parallelo,
ciascuna su una diversa serie di pixel alla volta; poiché in grafica non vale il
principio di località (informatica) non è possibile usare una memoria cache come
nella CPU principale, e la comunicazione con la RAM grafica deve essere
estremamente veloce: questo rende necessario adottare sia una frequenza di lavoro
della RAM grafica molto più alta di quella della memoria principale, sia l'adozione
di bus RAM-GPU molto ampi (128, 256 bit o anche 512 bit). Per lo stesso motivo, far
funzionare la GPU a frequenze molto più elevate della RAM grafica, adottando un
moltiplicatore di frequenza come per la CPU principale, non porterebbe nessun
beneficio prestazionale.
Ulteriori funzioni di accelerazione, utili per aumentare il livello di realismo delle
immagini calcolate, sono il calcolo in hardware delle luci incidenti (Transform and
Lighting o T&L), i pixel shader, il vertex shader e il rendering (rasterizzazione), il
filtro anisotropico e il filtro antialiasing.
Con questa nuova architettura le schede video 3D accelerate sollevano la CPU da
tutti i calcoli necessari alla visualizzazione, lasciandole solo il compito di aggiornare
la geometria dell'immagine (calcolo di spigoli e vertici, di rotazioni, intersezioni,
animazioni ecc.).
Le prime schede video accelerate 3D destinate al grande pubblico (prima di allora
erano molto costose e riservate a professionisti) sono state le famose Voodoo della
3dfx, la prima industria a produrre schede video con capacità 3D a prezzi popolari,
assorbita nel 2001 dalla concorrente Nvidia.
Hard Disk
Un disco rigido, anche chiamato disco fisso o hard disk drive(abbreviazioni
comuni: "hard disk", "HDD"), è un dispositivo di memoria di massa che utilizza uno
o più dischi magnetici per l'archiviazione dei dati.
Il disco rigido è uno dei tipi di dispositivi di memoria di massa attualmente più
utilizzati. È infatti presente nella maggior parte dei computer e anche in altri
dispositivi elettronici, come ad esempio il PVR.
Il disco rigido ha da poco tempo un serio concorrente, l'unità a stato solido, destinata
probabilmente in futuro a soppiantarlo.
Descrizione
Il funzionamento di un hard disk "aperto"
Il disco rigido è costituito fondamentalmente da uno o più piatti in rapida rotazione,
realizzati in alluminio o vetro, rivestiti di materiale ferromagnetico e da due testine
per ogni disco (una per lato), le quali, durante il funzionamento "volano" alla distanza
di poche decine di nanometri dalla superficie del disco leggendo e scrivendo i dati. La
testina è tenuta sollevata dall'aria mossa dalla rotazione stessa dei dischi che può
superare i 15.000 giri al minuto; attualmente i valori standard di rotazione sono
4.200, 5.400,5.600 (F*T*G*), 7.200, 10.000 e 15.000 giri al minuto.
Storia
L'hard disk è stato inventato nel 1956 dall'IBM. Il primo prototipo era costituito da
50 dischi del diametro di 24 pollici (circa 60 cm) e poteva immagazzinare circa 5
megabyte di dati. Era grande quanto un frigorifero, con un peso di oltre una
tonnellata. La denominazione originaria era fixed disk (disco fisso), il termine hard
disk (disco rigido) nacque intorno al 1970 per contrapposizione coi neonati floppy
disk (dischetti).
Nel 1963 sempre IBM ideò il meccanismo di sollevamento della testina mediante
l'aria. Nel 1973 IBM introdusse il modello 3340 Winchester, così denominato per
analogia con il popolare modello di fucile ".30-30 Winchester" poiché era dotato di
due dischi da 30 MB l'uno; questo nome entrò nell'uso comune come sinonimo di
disco rigido perché questo modello fu il predecessore di tutti i dischi rigidi moderni.
Il primo modello per personal computer fu il Seagate ST-506 prodotto da Seagate
Technology nel 1980, aveva una capacità di 5 MB, diametro di 5,25 pollici ed era
dotato di motore passo-passo per il movimento delle testine (il controllo voice coil
arriverà solo qualche anno dopo). Questo modello equipaggiava i personal computer
AT&T con processore 286 prodotti negli stabilimenti Olivetti di Scarmagno, in
seguito alla collaborazione della società di Ivrea con la multinazionale americana.
Contemporaneamente, la società OPE (Olivetti Peripheral Equipment), una
consociata Olivetti, forniva i dischi rigidi per i computer M24; storicamente questa
società fu l'unica in Europa a impegnarsi nel progetto, sviluppo e produzione di
questo tipo di periferica.
Caratteristiche prestazionali
Testina all'estremità del braccetto di lettura con il suo riflesso sul piatto.
Disco rigido da 8 GigaByte smontato nelle sue componenti
I dischi rigidi moderni hanno capacità e prestazioni enormemente superiori a quelle
dei primi modelli, ma poiché nel frattempo la velocità e le prestazioni delle memorie
ad accesso casuale (RAM e ROM) sono aumentate molto di più, la loro velocità nella
lettura e scrittura dei dati restano comunque di diversi ordini di grandezza al di sotto
delle prestazioni della RAM e della componentistica a stato solido che equipaggia un
computer. Per questo motivo il disco rigido è spesso la causa principale del
rallentamento di un computer soprattutto quando, a causa di una memoria RAM
inferiore alla memoria virtuale richiesta dai programmi in esecuzione, il sistema
operativo è costretto ad effettuare un gran numero di operazioni di swap tra il disco e
la memoria centrale.
Le caratteristiche principali di un disco rigido sono:
la capacità
il tempo di accesso
la velocità di trasferimento
La capacità è in genere espressa in gigabyte (GB). I produttori usano i gigabyte
decimali, invece delle approssimazioni per potenze di due usate per la memoria.
Questo significa che la capacità di un disco rigido è in realtà un poco più piccola di
quella di un modulo di memoria con la stessa capacità, e lo scarto aumenta
all'aumentare delle dimensioni. Quando la capacità è espressa in GB, il fattore di
correzione è di (1000/1024)3, pari a circa 0,93, per cui un disco rigido da 320 GB ha
una capacità effettiva di circa 298 GB. Attualmente (ottobre 2010) i dischi rigidi si
trovano in vendita con capacità fino a 3 TB. Alcune aziende accorpano più dischi in
un unico box per arrivare a capacità di 7,5 TB, si tratta di un espediente per poter
offrire la massima capacità di archiviazione nel minimo spazio, ad es: Lacie Big
Disk, Maxtor Shared Storage, ecc. La capacità può essere aumentata incrementando
la densità con cui le informazioni vengono memorizzate sui piattelli che compongono
l'hard disk o impiegandone un numero maggiore.
Il tempo di accesso è la variabile più importante nel determinare le prestazioni di un
disco rigido, conoscendo il modello, facilmente si può risalire ai dati tecnici
dell'unità, compreso il tempo di accesso, purtroppo molti produttori di computer non
menzionano questo dato, e a volte nemmeno la marca né il modello. Si tratta del
tempo medio necessario perché un dato, residente in un punto casuale del disco,
possa essere reperito. Il tempo impiegato dipende dalla velocità della testina a
spostarsi sulla traccia dove risiede il dato e dalla velocità di rotazione del disco;
maggiore è la velocità e più breve è il tempo impiegato dal dato a ripassare sotto la
testina nel caso questa non fosse arrivata in tempo sul dato, durante la rotazione
precedente (latenza rotazionale). I produttori cercano perciò di realizzare testine
sempre più leggere (che possono spostarsi più in fretta perché dotate di minore
inerzia) e dischi che girano più velocemente. Il tempo di accesso tipico per un disco
rigido da 7200 rpm è di circa 9 millisecondi. Per uno da 15.000 rpm è inferiore a 4
ms.
La velocità di trasferimento è la quantità di dati fornita dal disco rigido in un
determinato tempo (in genere si prende 1 secondo come riferimento). Usare dischi
che ruotino più velocemente o incrementare la densità di memorizzazione porta ad un
miglioramento diretto della velocità di trasferimento. Va ricordato che la velocità di
trasferimento cala in modo proporzionale al numero di discontinuità nei settori che
compongono il file ricercato (vedi frammentazione (informatica)).
Oltre alle tre viste sopra, altre caratteristiche influenzano in misura minore le
prestazioni di un disco rigido. Tra queste:
il buffer di memoria
la velocità dell'interfaccia
Il buffer è una piccola memoria cache (in genere di alcuni megabyte) posta a bordo
del disco rigido, che ha il compito di memorizzare gli ultimi dati letti o scritti dal
disco. Nel caso in cui un programma legga ripetutamente le stesse informazioni,
queste possono essere reperite nel buffer invece che sul disco. Essendo il buffer un
componente elettronico e non meccanico, la velocità di trasferimento è molto
maggiore, nel tempo, la capacità di questa memoria è andata sempre aumentando,
attualmente (ottobre 2010) 32 MB sono una dimensione abbastanza usuale.
L' interfaccia di collegamento tra il disco rigido e la scheda madre (o, più
specificatamente, il controller) può influenzare le prestazioni perché specifica la
velocità massima alla quale le informazioni possono essere trasferite da o per il disco.
Le moderne interfacce tipo ATA133, Serial ATA o SCSI possono trasferire centinaia
di megabyte per secondo, molto più di quanto qualunque singolo disco fisso possa
fare, e quindi l'interfaccia non è in genere un fattore limitante. Il discorso può
cambiare nell'utilizzo di più dischi in configurazione RAID, nel qual caso è
importante utilizzare l'interfaccia più veloce possibile, come per esempio la Fibre
Channel da 2 Gb/s.
Tempo di accesso a disco
Il tempo di accesso a disco è influenzato da cinque fattori:
Controller Overhead (overhead del controllore): è il tempo necessario alla
gestione dei dati e l'invio dell'opportuno interrupt; è il tempo in assoluto
minore;
Seek time (tempo di ricerca): è il tempo necessario a spostare la testina sulla
traccia; è il fattore più critico poiché si tratta di un movimento meccanico e non
di un impulso elettrico; questo fa sì che non si possa scendere al di sotto di
qualche decina di millisecondo;
Assessment time (tempo di assestamento): è il tempo necessario
all'assestamento della testina sulla traccia dopo lo spostamento; spesso viene
inglobato nel 'Seek time;
Latency time (tempo di latenza): (anche rotational latency) è il tempo
necessario perché, a causa della rotazione del disco, l'inizio del settore
desiderato arrivi a trovarsi sotto la testina; ovviamente dipende dalla velocità
dello spindle; per esempio con una velocità (tipica) di 5400 rpm, il tempo di
latenza massimo è di circa 11 millisecondi;
Transfer time (tempo di trasferimento): è il tempo necessario al settore per
passare sotto la testina, tempo durante il quale il settore viene letto o scritto.
Tempo di accesso: ControllerOverhead + SeekTime + Latency + TransferTime.
I dati sono generalmente memorizzati su disco seguendo uno schema di allocazione
fisica ben definito in base al quale si può raggiungere la zona dove leggere/scrivere i
dati sul disco. Uno dei più diffusi è il cosiddetto CHS acronimo per il termine inglese
Cylinder/Head/Sector (Cilindro/Testina/Settore); in questa struttura i dati sono
memorizzati avendo come indirizzo fisico un numero per ciascuna delle seguenti
entità fisiche:
Piatto
un disco rigido si compone di uno o più dischi paralleli, di cui ogni superficie, detta
"piatto" e identificata da un numero univoco, è destinata alla memorizzazione dei
dati.
Traccia
ogni piatto si compone di numerosi anelli concentrici numerati, detti tracce, ciascuna
identificata da un numero univoco.
Cilindro
l'insieme di tracce alla stessa distanza dal centro presenti su tutti i dischi è detto
cilindro. Corrisponde a tutte le tracce aventi il medesimo numero, ma diverso piatto.
Settore
ogni piatto è suddiviso in settori circolari, ovvero in "spicchi" radiali uguali ciascuno
identificato da un numero univoco.
Blocco
L'insieme di settori posti nella stessa posizione in tutti i piatti.
Testina
Su ogni piatto è presente una testina per accedere in scrittura o in lettura ai dati
memorizzati sul piatto; la posizione di tale testina è solidale con tutte le altre sugli
altri piatti. In altre parole, se una testina è posizionata sopra una traccia, tutte le
testine saranno posizionate nel cilindro a cui la traccia appartiene.
Questa struttura introduce una geometria fisica del disco che consta in una serie di
"coordinate" CHS, esprimibili indicando cilindro, testina, settore. In questo modo è
possibile indirizzare univocamente ciascun blocco di dati presente sul disco. Ad
esempio, se un disco rigido si compone di 2 dischi (o equivalentemente 4 piatti),
16384 cilindri (o equivalentemente 16.384 tracce per piatto) e 16 settori, e ciascun
settore di una traccia ha una capacità di 4096 byte, allora la capacità del disco sarà di
4 × 16384 × 16 × 4096 byte, ovvero 4 GiB.
Il fattore di interleaving è il numero dei settori del disco rigido che si deve saltare per
leggere consecutivamente tutti quelli della traccia. Ciò dipende strettamente dalle
caratteristiche prestazionali del disco rigido stesso, cioè dalla velocità di rotazione del
disco, dal movimento dei seeker con le relative testine e dalla velocità di letturascrittura della stessa testina.
Tale processo è stato introdotto poiché inizialmente le CPU, che ricevevano e
rielaboravano i dati letti, compivano queste azione ad una velocità inferiore della
velocità di lettura/scrittura sul disco rigido, quindi, una volta rielaborati i dati
provenienti da un settore, la testina si troverebbe già oltre l'inizio del settore
successivo. Alternando i settori in modo regolare e leggendoli secondo lo specifico
interleaving factor, si velocizzava il disco rigido e il calcolatore. I moderni dischi
rigidi non necessitano di interleaving.
Altre Caratteristiche
I dischi rigidi sono prodotti in 7 dimensioni standardizzate chiamati "fattore di
forma", e si riferisce al diametro del disco espresso in pollici: 8 - 5,25 - 3,5 - 2,5 - 1,8
- 1 - 0,85. I primi sono utilizzati nei personal computer chiamati desktop, nei server, e
nelle unità NAS, unità remote di memorizzazione in reti di calcolatori e ultimamente
disponibili anche per uso casalingo. I secondi nei computer portatili e dovunque ci sia
poco spazio e/o potenza di alimentazione, i più piccoli nei dispositivi tascabili. Tutti i
formati sono utilizzati anche per realizzare memorie di massa esterne ai computer,
collegabili tramite un cavo USB o FireWire, adottate quando sia necessario ampliare
la capacità di memorizzazione del computer o quando occorra trasportare
agevolmente grandi quantità di dati. Nel formato maggiore l'alimentazione avviene
tramite un alimentatore collegato alla rete elettrica, il formato 2,5 solitamente è
alimentato direttamente dal cavo dell'interfaccia, i più piccoli dalla batteria del
dispositivo in cui risiedono. Attualmente (ottobre 2010), la capacità massima di
archiviazione di questi dispositivi è di 3 terabyte. Il miglior rapporto tra capacità e
prezzo sono i dispositivi da 1 terabyte, due costruttori, Seagate Technology e Western
Digital forniscono queste periferiche differenziandone i modelli in base alle
prestazioni, velocità e consumo di corrente, le unità destinate ai RAID hanno un
MTBF di 1.200.000 ore (100 anni). I dischi rigidi da 2,5" sono infatti più piccoli e
meno esigenti, ma al prezzo di capacità e prestazioni sensibilmente minori e costi
maggiori (ad esempio, una velocità di rotazione di 4200 o 5400 rpm, invece dei 7200
rpm o più dei dischi da 3,5). Il disco rigido della dimensione di un pollice è il più
recente immesso sul mercato e corrisponde al formato compact flash di tipo II, grandi
solo due o tre centimetri e spessi quanto una carta di credito, ma capaci di
memorizzare comunque alcuni gigabyte di dati (vedi IBM Microdrive). L'ideazione
da parte di Hitachi nel 2005 del cosiddetto metodo di "registrazione perpendicolare"
ha aperto la strada ad una nuova generazione di dischi rigidi, con capacità dieci volte
maggiori a parità di dimensioni (o, parallelamente, dimensioni 10 volte minori a
parità di capacità), grazie ad una maggiore densità con cui le informazioni vengono
memorizzate nel materiale magnetizzato che costituisce i piatti del disco. Un'ulteriore
incremento della densità di bit per unità di superficie è prevedibile con l'impiego di
un diodo laser che riscaldi la zona di posizionamento del bit da registrare; questa
tecnica in via di sviluppo porta a prevedere come massimo impaccamento, un terabit
per pollice quadrato.
I dischi rigidi più veloci, avendo motori più potenti, sviluppano molto calore. Alcuni
devono addirittura essere raffreddati con ventole apposite.
Segni di head crash in un hard disk di ultima generazione
Il suono emesso da un disco è composto da un sibilo continuo, generato dalla
rotazione dei dischi e da un crepitio intermittente, di cui ogni clic corrisponde ad un
movimento della testina. In molti casi il rumore generato può risultare fastidioso,
pertanto i produttori tendono ad adottare soluzioni tecniche per ridurlo al minimo,
inevitabilmente però, un disco veloce risulta più rumoroso di uno lento; tra i vari dati
forniti dal costruttore per un dato modello, compare anche il valore di rumore
espresso in dB. Per maggiore flessibilità, in alcuni dischi la velocità di spostamento
della testina è impostabile via software; alcuni produttori, per ridurre di qualche
decibel il rumore, adottano la bronzina come supporto dell'albero rotante al posto del
cuscinetto. Anomalie nei suoni emessi dall'hard disk sono indicativi di severi danni
meccanici, i quali rendono i dati inaccessibili e solo attraverso sofisticate tecniche di
recupero dati, questi possono essere in alcuni casi resi nuovamente disponibili. Un
significativo miglioramento si registra anche nei consumi di energia elettrica (Wh),
sempre in diminuzione grazie al sempre più sofisticato controllo delle parti
meccaniche in movimento, come ad esempio la gestione della velocità di
spostamento delle testine proporzionale al tempo che impiegheranno ad arrivare sul
punto in cui passerà il dato, è inutile arrivare prima sul posto e poi dover aspettare,
meglio arrivare giusto in tempo con velocità più lenta, significa meno corrente
consumata e minor rumore.
RAM
In informatica la memoria ad accesso casuale, acronimo RAM (del corrispondente
termine inglese Random-Access Memory), è una tipologia di memoria informatica
caratterizzata dal permettere l'accesso diretto a qualunque indirizzo di memoria con
lo stesso tempo di accesso.
La memoria ad accesso casuale si contrappone alla memoria ad accesso sequenziale
e alla memoria ad accesso diretto rispetto alle quali presenta tempi di accesso
sensibilmente inferiori motivo per cui è utilizzata come memoria primaria.
La tipologia di memoria ad accesso casuale più comune attualmente è a stato solido,
a lettura-scrittura e volatile, ma rientrano nella tipologia di memoria ad accesso
casuale la maggior parte delle tipologie di ROM (inteso nell'eccezione più comune e
non come memoria a sola lettura), la NOR Flash (una tipologia di memoria flash),
oltre a varie tipologie di memorie informatiche utilizzate ai primordi dell'informatica
e oggi non più utilizzate come ad esempio la memoria a nucleo magnetico.
Esclusivamente l'acronimo RAM (non il termine "memoria ad accesso casuale") ha
anche una seconda accezione più ristretta ma attualmente più diffusa secondo cui la
RAM è una memoria ad accesso casuale della tipologia più comune cioè a stato
solido, a lettura-scrittura e volatile.
Tipologie
SRAM
Vecchia RAM a nuclei magnetici da 1,5 Megabit
Nelle SRAM, acronimo di Static Random Access Memory, ovvero RAM statica ogni
cella è costituita da un latch realizzato da due porte logiche. Le celle sono disposte a
matrice e l’accesso avviene specificando la riga e la colonna.
Consentono di mantenere le informazioni per un tempo infinito, sono molto veloci,
consumano poco e quindi dissipano poco calore. La necessità di usare molti
componenti, però, le rende molto costose, difficili da impacchettare e con una scarsa
capienza.
Proprio per la loro bassa capienza, sono solitamente usate per le memorie cache,
dove sono necessarie elevate velocità in abbinamento a ridotti consumi e capienze
non troppo elevate (dell'ordine di pochi Mb).
DRAM
Memoria DIMM DDR
La DRAM, acronimo di Dynamic Random Access Memory, ovvero RAM dinamica,
è costituita, a livello concettuale, da un transistor che separa un condensatore, il
quale mantiene l'informazione, dai fili di dati. A livello pratico non viene usato un
vero condensatore ma si sfruttano le proprietà elettrico/capacitive dei
semiconduttori. È così possibile usare un solo componente per ogni cella di
memoria, con costi molto ridotti e la possibilità di aumentare notevolmente la
densità di memoria.
A causa del non perfetto isolamento il condensatore si scarica, quindi dopo un breve
lasso di tempo il suo contenuto diventa inaffidabile. Si rende necessario perciò
ricaricarlo, l'operazione è detta di "refreshing", provvedendo ad eseguire
un'operazione di lettura fittizia e riscrittura entro il tempo massimo in cui il
contenuto può essere considerato ancora valido. Queste operazioni sono eseguite da
un circuito interno alle memorie stesse. Oltre a comportare un certo dispendio di
energia rendono più lenta la memoria in quanto, mentre si sta eseguendo il rinfresco,
non è possibile accedervi. Le memorie DRAM si possono considerare abbastanza
affidabili anche perché molto spesso ad ogni riga della memoria è associato un bit di
parità, che consente di individuare eventuali errori singoli all'interno della riga,
oppure una serie di bit (login), che opportunamente impostati nel momento di ogni
scrittura, generano il codice di Hamming corrispondente, che consente di individuare
e correggere errori singoli e individuare errori doppi.
È importante sottolineare come l'operazione di lettura sia distruttiva, in quanto nel
momento in cui un dato viene letto viene anche perso; risulta quindi necessaria la
sua riscrittura immediata e questa porta a uno spreco di tempo.
Le DRAM sono asincrone, ovvero l'accesso in scrittura ed in lettura è comandato
direttamente dai segnali in ingresso al contrario delle memorie sincrone in cui il
passaggio da uno stato all'altro è sincronizzato ad un segnale di clock.
Per ogni cella sono presenti un numero basso di componenti che permettono di
ottenere un’alta capacità complessiva del dispositivo, un basso assorbimento di
potenza e costi ridotti, sono dunque utilizzate generalmente per la memoria
principale del sistema.
SDRAM
Memoria SODIMM DDR, utilizzata per i personal computer portatili.
La SDRAM, acronimo di Synchronous Dynamic Random Access Memory, ovvero
DRAM sincrone, si differenzia dalla DRAM normale per il fatto che l'accesso è
sincrono, ovvero governato dal clock. Tale segnale di clock temporizza e sincronizza
le operazioni di scambio di dati con il processore, raggiungendo una velocità almeno
tre volte maggiore delle SIMM con EDO RAM.
Tipicamente saldata in un modulo di tipo DIMM, è normalmente impiegata come
memoria principale dei Personal Computer di tipo Pentium e successivi.
Alcuni esempi sono classificati come:
SDR SDRAM : indica le originarie memorie SDRAM. Con l'evoluzione
tecnica, questa tipologia ha preso il suffisso SDR ossia Single Data Rate, per
differenziarle dalle successive SDRAM con controller DDR. Il single data
rate indicava l'accettazione di un comando e il trasferimento di 1 word di dati
per ciclo di clock (tipicamente 100 e 133 Mhz). Il data bus era diversificato
ma tipicamente erano impiegate su moduli DIMM da 168 pin e potevano
operare su 64 bit (non-ECC) o 72 bit (ECC) alla volta.
DDR SDRAM
DDR2
DDR3
SODIMM: da notare che il package SODIMM non necessariamente contiene
memoria SDRAM.
FeRAM
La FeRAM, acronimo di Ferroelectric Dynamic Random Access Memory, ha la
peculiarità di mantenere i dati senza l'ausilio del refresh di sistema. Utilizzano un
materiale denominato ferroelettrico che ha la capacità di mantenere la propria
polarizzazione anche dopo esser scollegato dalla fonte energetica.
Frequenze RAM
PC1600
200 MHz
PC2100
266 MHz
PC2700
333 MHz
PC3000
366 MHz
PC3200
400 MHz
PC3500
433 MHz
PC4300
533 MHz
PC5300
667 MHz
PC6400
800 MHz
PC8500
1066 MHz
PC10600
1333 MHz
PC12800
1600 MHz
PC14400
1800 MHz
PC16000
2000 MHz
PC17066
2133 MHz
PC17600
2200 MHz
RDRAM PC800
800 MHz
RDRAM PC1066 1066 MHz
RDRAM PC1200 1200 MHz
Masterizzatore
Il masterizzatore è nato nei primi mesi del 1992 ed è un dispositivo hardware atto a
creare o duplicare Compact Disc (CD) o DVD di dati, audio e/o video. È possibile
utilizzare tali dispositivi per:
masterizzazione di CD-R/DVD-R/DVD+R, in cui la scrittura sul supporto è
definitiva e come tale non più modificabile;
masterizzazione di CD-RW/DVD-RW/DVD+RW, o supporti riscrivibili, sui
quali è possibile effettuare operazioni di cancellazione dei dati presenti
all'interno degli stessi e quindi riutilizzo per nuove scritture.
Nel mercato dei masterizzatori vi è un'ulteriore ramificazione: interni oppure esterni.
I masterizzatori esterni non occupano alloggiamenti (slot da 5 pollici e 1/2)
all'interno del computer e si collegano mediante due tipi di porte, connessioni
proprietarie a parte: USB o Firewire. La prima soluzione è molto diffusa, grazie
all'ampio successo della tecnologia USB 2.0 (transfer rate teorico massimo 480
Mbps), la seconda, ovvero la connessione Firewire (transfer rate teorico massimo
400 Mbps/IEEE1394 e 800 Mbps/IEEE1394b), meno.
I transfer rate per i masterizzatori interni dipendono dal tipo di connessione: SCSI
(ormai in disuso), EIDE o Serial ATA.
Poiché le sessioni sui CD e sui DVD devono essere scritte in una sola passata, senza
interruzioni, i masterizzatori dispongono di una certa quantita di cache, ovvero di
memoria interna temporanea, in cui memorizzare alcuni megabyte di dati prima di
iniziare a scrivere. Nel caso il computer venga temporaneamente rallentato (ad
esempio perché i file da scrivere sono molto frammentati), non riesca a fornire
abbastanza dati al masterizzatore, quest'ultimo svuoterà progressivamente la cache in
modo da poter continuare a scrivere a velocità costante. Tuttavia se la velocità di
scrittura è eccessiva ad un certo punto la cache verrà inevitabilmente esaurita
producendo un CD illeggibile.
Per far fronte a questo problema sono state sviluppate delle tecnologie che
permettono al masterizzatore di modificare al volo la velocità di scrittura,
adattandola alla velocità del flusso di dati in entrata; i sistemi più noti sono burn
proof e safe link.
Qui sotto vi lasciamo una tabella dei vari Masterizzatori che possiamo trovare sul
mercato ,molto utile e interessante :D
Compatibilità
CD
impres
so
(da
matrice
)
DVD
CD-R
CDRW
impres
so
(da
matrice
)
DVD-R
DVD+ DVDR
RW
DVD+R DVD+ DVDW
R DL RAM
BD-R
Lettore CD
audio
Lettur Lettura Lettura No
[1]
[2]
a
No
No
No
No
No
No
No
Lettore CDROM
Lettur Lettura Lettura No
[1]
[2]
a
No
No
No
No
No
No
No
Masterizzatore Lettur Scrittur Lettura No
CD-R
a
a
No
No
No
No
No
No
No
Masterizzatore Lettur Scrittur Scrittur No
CD-RW
a
a
a
No
No
No
No
No
No
No
Lettura No
No
Lettura
Lettura No
No
Lettura Lettura
[4
Masterizzatore Lettur Scrittur Scrittur Lettur Scrittur
DVD-R
a
a
a
a
a
Lettura Lettura
[6
Masterizzatore Lettur Scrittur Scrittur Lettur Scrittur
DVD-RW
a
a
a
a
a
Lettura Scrittur
[6]
[7]
a
Lettura
Lettura No
No
Masterizzatore Lettur Scrittur Scrittur Lettur Lettura
DVD+R
a
a
a
a
Scrittur Lettura
a
Lettura
Lettura No
No
Masterizzatore Lettur Scrittur Scrittur Lettur Lettura
DVD+RW
a
a
a
a
Scrittur Lettura
a
Scrittur Lettura No
[5]
a
No
Masterizzatore Lettur Scrittur Scrittur Lettur Scrittur
DVD±RW
a
a
a
a
a
Scrittur Scrittur
a
a
Scrittur Lettura No
[5]
a
No
Masterizzatore Lettur Scrittur Scrittur Lettur Scrittur
[8]
DVD±RW/DV a
a
a
a
a
D+R DL
Scrittur Scrittur
[8]
a
a
Scrittur Scrittur No
a
a
No
Masterizzatore Lettur Scrittur Scrittur Lettur Scrittur
DVD Super
a
a
a
a
a
Multi
Scrittur Scrittur
a
a
Scrittur Scrittur Scrittu No
a
a
ra
Masterizzatore Lettur Scrittur Scrittur Lettur Scrittur
Blu-Ray Super a
a
a
a
a
Multi
Scrittur Scrittur
a
a
Scrittur Scrittur Scrittu Scrittu
a
a
ra
ra
Lettore DVDROM
Lettur Lettura Lettura Lettur Lettura
[3]
[3]
]
a
a
[4
[4]
]
Lettura
4]
]
[
[5]
[5]
[5]
[5]
Dissipatore
Un dissipatore attivo (da una ventola) usato per raffreddare la CPU in una scheda
madre di un PC. Alla sua destra è presente un piccolo dissipatore passivo usato per
raffreddare il northbridge della scheda madre.
In elettronica un dissipatore è un dispositivo che consente l'abbassamento di
temperatura di componenti che sprigionano calore come i Transistor o i processori,
evitando che il surriscaldamento degli stessi ne provochi il malfunzionamento,
l'arresto o la rottura.
I materiali utilizzati sono il rame e l'alluminio; il primo viene impiegato nei casi
dove occorra la massima efficienza nel trasferimento termico, accettandone il
maggior costo e il maggior peso specifico, l'alluminio viene scelto per condizioni
operative meno impegnative. Tutte le CPU ne sono dotate a causa dell'elevato calore
generato. Solitamente è a forma toroidale, configurato a lamelle, per aumentare
l'efficienza nella sottrazione di calore, viene accoppiato ad una ventola mossa da un
piccolo motore elettrico (collegato direttamente alla scheda madre) che fornisce un
flusso di aria di ventilazione. Ne esistono di molte altre forme, conformate in
funzione dei componenti a cui devono essere applicati, in alcuni casi,
prevalentemente apparecchiature voluminose sviluppanti molto calore, costituiscono
parte portante del telaio stesso. Il principio sfruttato è sempre quello di aumentare la
superficie radiante per favorire la dispersione del calore per irraggiamento e
convezione. Quando necessita efficienza estrema e minimo ingombro, si adotta la
soluzione definita "ventilazione forzata", come nel caso delle CPU o della
strumentazione elettronica.
Particolare attenzione va rivolta all'accoppiamento meccanico tra il dispositivo
generante calore e il dissipatore, per ottenere la massima efficienza, viene interposto
tra le due superfici a contatto, una pasta termoconduttiva, avente funzione di
eliminare completamente il velo di aria inevitabilmente presente, essendo la stessa
un pessimo conduttore termico, ne limiterebbe l'efficienza.
Dissipatori attivi
Dispongono di un corpo dissipante alettato in alluminio o rame, attraverso il quale
viene fatto passare un flusso d'aria generato da una ventola, che ne asporta il calore
trasferendolo lontano dal componente. È il sistema di raffreddamento di minore
ingombro e più economico, e può essere più o meno rumoroso a seconda
dell'efficienza del corpo dissipante, della velocità di rotazione della ventola e dalla
qualità dei cuscinetti adottati.
Nel marzo del 2008, due scienziati statunitensi hanno realizzato un dissipatore per
CPU in grado di creare una corrente d'aria senza l'uso di parti meccaniche in
movimento, sfruttando il principio fisico dell'effetto corona. Il risultato è un sistema
di ventilazione virtualmente privo di emissioni acustiche e in grado di consumare
solo una frazione dell'energia richiesta dai comuni dissipatori attivi.
Dissipatori passivi
Dissipatore passivo
Costituiti da lamelle in rame o alluminio molto ravvicinate, tenute insieme da una
struttura portante, anch'essa in rame e/o alluminio. Le lamelle possono essere
realizzate con procedimenti diversi: pressofusione dell'alluminio, ribattitura o
saldatura delle stesse ad un blocco portante, o ricavate per fresatura dal pieno (il più
costoso). Il calore viene dissipato grazie alla conduttività termica del metallo
utilizzato ed alle correnti convettive che si generano, per effetto della differenza di
temperatura, nell'aria intorno al dissipatore. Per questo è molto importante che il
dissipatore venga posizionato nel verso giusto: ovvero bisogna fare in modo l'aria
abbia la possibilità di scorrere in verticale lungo le superfici del dissipatore, perciò le
alette del dissipatore devono essere orientate in verticale e mai in orizzontale.
Inoltre una parte di calore viene ceduta all'ambiente circostante attraverso il
fenomeno dell'irradiazione. Qualsiasi corpo che si trovi a temperatura superiore a
zero kelvin emette energia sotto forma di radiazione elettromagnetica, riducendo di
conseguenza la sua temperatura. In condizioni di equilibrio ciascun corpo emette la
stessa quantità di energia che riceve dagli oggetti circostanti (fra cui sono comprese,
ad esempio, le pareti della stanza in cui questo si trova). Nel caso del dissipatore, per
il fatto che questo si trova a temperatura superiore rispetto agli oggetti circostanti
l'energia emessa è maggiore di quella ricevuta. Il contributo dell'irradiazione alla
dissipazione è predominante alle basse temperature e si può dire che sia praticamente
l'unico mezzo di dissipazione di calore per i componenti elettronici comuni. Per i
dissipatori in genere ha luogo un mix di scambio convettivo e irradiazione che viene
raggruppato sotto la definizione di adduzione, a cui si riferiscono i coefficienti che
solitamente si trovano in giro.
Questo sistema di raffreddamento, a parità di prestazioni è più ingombrante di un
analogo sistema a ventilazione forzata, però ha il pregio di essere completamente
silenzioso.
Dissipatori ad acqua
Questi dissipatori sono dei veri e propri piccoli impianti di raffreddamento, dove
l'acqua, fatta circolare da una pompa, passa attraverso il waterblock, un dispositivo
che ha lo scopo di assorbire il calore dal componente da raffreddare e trasferirlo
all'acqua in circolo, la quale fluendo attraverso un radiatore attraversato da un flusso
d'aria generato da una o più ventole, il calore dell'acqua viene disperso nell'ambiente.
Questo sistema di raffreddamento è il più efficace ma anche il più costoso, inoltre
bisogna effettuare manutenzione periodicamente cambiando l'acqua e pulendone i
componenti. Esistono varie aziende italiane nella produzione del watercooling.
Ventola [Raffreddamento ad Aria]
Ventola standard da 80mm, usata nei PC.
La ventola è uno strumento in grado di muovere l'aria o altri gas attraverso delle
pale in movimento. Nei computer viene utilizzato un motorino elettromagnetico
collegato all'alimentatore del PC, in questo ambito vengono usate per estrarre l'aria
calda dall'interno in modo da prevenire surriscaldamenti del processore e di altro
hardware o montate direttamente sui radiatori di alcuni componenti, come il
processore della scheda madre o della scheda video;
Nel caso si abbia la possibilità di montare più ventole sul case si decide di far sì che
alcune di queste immettano aria, mentre altre la buttino fuori, ma le ventole non
hanno solo questa funzione, infatti dal 2002 si stanno adoperando delle ventole
luminose o fluorescenti, per dei lavori di modding (rendere il PC esteticamente
appariscente), alcuni modelli incorporano un termoresistore, il quale in funzione
della temperatura del flusso d'aria in transito, adegua la velocità di rotazione della
ventola. Queste tipologie di ventole vengono impiegata anche in innumerevoli
apparecchiature elettroniche e, nei casi in cui il flusso d'aria sia forzato dall'esterno
verso l'interno, solitamente è presente un filtro in materiale sintetico atto a ridurre la
polvere immessa all'interno dell'apparecchiatura. La forma può essere quadra o
tonda, le dimensioni variabili da pochi cm a oltre 30, in origine erano realizzate
esclusivamente in alluminio pressofuso, in seguito si iniziò a produrle anche in
materiale plastico, queste hanno il vantaggio di avere minor peso ma risultano
inevitabilmente più rumorose.
PERCHÉ VERIFICARE SE IL PC È CORRETTAMENTE RAFFREDDATO O
NO?
Spesso i problemi dei sistemi operativi Windows hanno origine di natura software;
tuttavia esistono molte circostanze in cui, nonostante vari tentativi, anche quello
estremo di formattare e reinstallare, un PC continua a malfunzionare. Per verificare
se il problema deriva proprio da un cattivo smaltimento del calore, si possono usare
metodi empirici, software e fisici. Vediamo come.
METODI EMPIRICI
Per metodo empirico intendo la verifica, con le mani, della temperatura del case.
Quando esso comincia ad essere tiepido, è già un cattivo segno, in quanto almeno il
metallo che custodisce l'interno del PC deve mantenersi il più possibile a
temperatura ambiente. Il metallo è un ottimo conduttore di calore, quindi dovrebbe
raffreddarsi più velocemente degli altri materiali presenti all'interno di un computer;
se rimane caldo persino l'acciaio, pensate la plastica della scheda madre...
METODI SOFTWARE
Siccome questo meccanismo somiglia un po' al misurarsi la febbre toccandosi la
fronte, le schede madri dei PC prodotte negli ultimi 4 anni sono dotate di uno o più
sensori per la rilevazione delle temperature, di sicuro non precisi, ma in grado di
fornire una valida indicazione della situazione termica del PC. Le temperature
massime consigliate sopportate dai vari componenti variano da modello a modello,
in genere, a titolo puramente esplicativo, non vanno superati i 70°C sulla CPU (ma
E' OBBLIGATORIO informarsi bene), 55°C sugli HD e 45°C sulla scheda madre.
METODI FISICI
In condizioni particolari (es. overclock estremi) è possibile usare specifici sensori
termici, dotati di notevole precisione e praticità d'uso; tuttavia per il loro prezzo
elevato e relativa inutilità in ambito domestico, qui non approfondiamo
ulteriormente l'argomento.
COME LEGGERE I DATI FORNITI DAI SENSORI?
Ci sono principalmente due vie; una passa per il BIOS, l'altra per un software
specifico. In genere i produttori forniscono a corredo delle schede madri un
programma adatto allo scopo, spesso aggiornabile via Web; altrimenti è possibile
servirsi di un programma generico, che supporta un gran numero di schede madri, il
cui nome è Motherboard Monitor, ed è sicuramente il più completo come numero di
funzioni. Non è compito di questa guida spiegare il funzionamento di M.M. Ad ogni
modo, il suo uso è generalmente immediato, in caso di dubbi la guida in linea
dovrebbe venire incontro a qualunque genere di domanda.
Una volta verificato se e quale dei componenti eccede le temperature perlomeno
consigliate dai produttori (ovvio che se si eccede quella massima, nel migliore dei
casi il componente si disattiva da solo, quando non affumica letteralmente) bisogna
procedere ad una migliore dissipazione del calore che produce.
Qui si apre un capitolo fatto di 5 paragrafi, dedicati rispettivamente a:
CPU;
Memorie RAM;
Hard disk;
Alimentatore;
Case.
Trascuriamo, per il momento, il raffreddamento dei chip di memoria RAM, per due
motivi: principalmente perché è necessario solo se si sottopone il PC alla pratica
dell'overclocking, secondariamente perché l'avvento delle memorie DDR2,
caratterizzate da un packaging diverso e da un voltaggio di soli 1.8V (contro i 2.5
delle DDR1) contribuirà a ridurre ulteriormente la dissipazione termica di questo
genere di componenti.
RAFFREDDAMENTO CPU
La CPU è notoriamente il componente che dissipa la maggior quantità di calore; a
titolo di esempio, i più recenti Pentium 4 Prescott disperdono sotto forma di calore
ben il 30% dell'energia che ricevono. Sebbene i produttori stiano lavorando per
ridurre questo valore, riducendo il canale dei transistor e agendo sul tipo di
metalizzazione e stratificazione del silicio, oggigiorno i processori richiedono
sistemi decisamente più complessi di un tempo per raffreddare e rendere loro
affidabili.
Se avete scoperto che la vostra CPU lavora a temperature non idonee, è tempo di
effettuare un intervento dedicato. Nella maggior parte dei casi è possibile risolvere
il problema senza cambiare dissipatore, controllando quanto segue:
La disposizione della pasta termoconduttiva; posta tra dissipatore e CPU, migliora il
contatto tra di essi, aumentando la capacità del dissipatore stesso. Deve essere
messa bene affinché partecipi allo scopo: né troppa, né poca: un velo ben spalmato
è la soluzione migliore.
La corretta rotazione delle ventole; non sono eterne, possono rompersi e perdere
l'allineamento o semplicemente essere appensantite dalla polvere. Se una spolverata
non basta, è necessario sostituirla.
Il corretto montaggio del dissipatore stesso. Ogni dissipatore accoppiato ad un tipo
di socket necessita di una particolare installazione, bisogna dunque riferirsi al
manuale del dissipatore e conoscere bene il tipo di scheda madre su cui stiamo
agendo.Se queste misure dovessero rivelarsi insufficienti, è necessario acquistare un
dissipatore più potente, o perlomeno sostituire la ventola del dissipatore che già si
possiede con un modello dotato di maggior CFM (Cubic Feet per Minute, piedi
cubici al minuto), cioè maggior quantità di aria spostata nel'unità di tempo. Qui
entriamo in un campo molto vasto, su cui talvolta pure le certezze scarseggiano.
Non è nostro compito entrare nel merito dei vari modelli di dissipatore, ognuno va
scelto in base a tanti fattori, potenza da smaltire, tipo di socket, tipo di scheda
madre, tipo di case, ecc.
N.B. 1 CFM = 0,028315 metri cubi al minuto.
RAFFREDDAMENTO HARD DISK
Nella maggior parte dei casi di PC per ambiente domestico, non è necessario
prestare particolare attenzione alla dissipazione del calore degli Hard disk. Tuttavia,
se cadete in una di queste condizioni:
Presenza di almeno 2 Hard disk ravvicinati;
Case piccolo o in situazione di scarsa ventilazione;
Ambiente molto caldo;
PC acceso 24 h su 24 7 gg. su 7,è opportuno acquistare un dissipatore con ventola
specifico per hard disk, o semplicemente migliorare (come vedremo in seguito) il
ricircolo di aria all'interno del case. Bisogna sottolineare come sottoporre un HD ad
una temperatura superiore a quella consentita ne accorci di molto la vita utile, col
rischio di perdere i dati in esso contenuti in caso di cedimento improvviso.
N.B. E' possibile verificare i parametri degli HD, tra cui la temperatura, con HDD
Health.
RAFFREDDAMENTO ALIMENTATORE
Anche qui, nella maggior parte dei casi, gli alimentatori provvedono da soli al loro
raffreddamento. Quando un alimentatore comincia a produrre calore in quantità
anomala ci sono due sole spiegazioni possibili: o è prossimo alla fine della sua vita
lavorativa, o è sovrautilizzato rispetto alla potenza nominale. E' necessario, dunque,
in entrambi i casi procedere alla sua - quanto più rapida possibile - sostituzione.
RAFFREDDAMENTO CASE
Spesso e volentieri le ventole sono impossibilitate ad aspirare aria fresca sui
componenti, in quanto l'aria calda nel case ristagna pericolosamente. Questo caso,
facilmente verificabile sia empiricamente, sia via SW, quando le temperature di tutti
i componenti sono più alte del normale, è risolvibile agendo sulla ventilazione del
case intero, ed eventualmente solo dopo su ciascun componente.
In generale basta applicare due ventole (i case più moderni ne permettono di
installare anche molte più) disposte così: una anteriormente nella zona bassa, sotto
gli HD, che aspiri aria fresca dall'esterno verso l'interno, ed una posteriormente,
nella zona alta, che spinga fuori l'aria calda (e che quindi aiuti quella anteriore a
richiamarne di nuova, fresca). Sulla qualità, quantità e caratteristiche delle ventole
non disquisiamo; su PC domestici, non overclocckati, bastano ventole da pochi €
per migliorare facilmente la situazione.
WaterCooling [Raffreddamento a liquido]
Il termine "raffreddamento a liquido" sembra un'espressione legata al mondo dei
motori, non trovate? Effettivamente, il raffreddamento a liquido è una parte
integrante dei più classici motori a benzina da almeno 100 anni. Ma perché,
potremmo chiederci, è il metodo di raffreddamento preferito per le automobili? Che
cosa rende così interessante il raffreddamento a liquido?
Per scoprirlo dobbiamo confrontarlo con il raffreddamento ad aria. Se confrontiamo
questi metodi, ci sono due principali proprietà da considerare: la conducibilità
termica e il calore specifico.
La conducibilità termica è la proprietà fisica che descrive quanto bene una sostanza
è in grado di trasferire il calore. La conducibilità termica dell'acqua è 25 volte
superiore a quella dell'aria. Ovviamente, questa caratteristica dona un gran
vantaggio al raffreddamento a liquido rispetto quello ad aria, dato che il calore può
essere trasferito molto più velocemente.
Il calore specifico è un'altra importante proprietà fisica, e indica la quantità di
energia necessaria per aumentare la temperatura di una sostanza di un grado. Il
calore specifico dell'acqua è circa quattro volte quello dell'aria, e ciò significa che
necessita di un'energia quattro volte superiore per scaldarsi di un grado rispetto
all'aria. Ancora una volta, l'abilità dell'acqua di assorbire energia termica senza
aumentare la sua temperatura è un grande vantaggio rispetto al raffreddamento ad
aria.
Detto questo, è innegabile che il raffreddamento a liquido sia più efficiente rispetto
a quello ad aria. Tuttavia ciò non basta per dire che sia la scelta migliore per tutti i
componenti del PC.
Raffreddamento a liquido per PC
Nonostante le caratteristiche di trasferimento del calore superiori dell'acqua, ci sono
alcune convincenti ragioni per non mettere l'acqua nel PC. La principale, e più
importante, è che questo ottimo liquido per il raffreddamento è anche un perfetto
conduttore di elettricità.
Se accidentalmente versate una tazza d'acqua sul motore della vostra auto mentre
rabboccate la vaschetta del liquido di raffreddamento non metterete a rischio
l'incolumità del motore. D'altro canto, se la tazza d'acqua la versate sulla
motherboard del vostro PC, i danni che potrete causare saranno ingenti. C'è quindi
un chiaro rischio associato all'utilizzo del raffreddamento a liquido con i computer.
Un altro fattore da considerare è la manutenzione. I sistemi ad aria sono semplici e
poco costosi da produrre e riparare rispetto le controparti ad acqua, e i dissipatori
non richiedono alcuna manutenzione, a parte soffiar via ogni tanto la polvere che
accumulano le ventole. I sistemi ad acqua sono invece più difficili da implementare
e gestire.
Terzo, i componenti per i sistemi a liquido sono più costosi rispetto a quelli ad aria.
Mentre una collezione completa di dissipatori e ventole per raffreddare la CPU,
GPU e chipset costa al massimo 150 euro, un sistema a liquido completo per gli
stessi componenti può arrivare anche a 500 euro.
Con tutte queste negatività, sembra che non sia facile vendere tali sistemi. Tuttavia,
la verità è che i benefici termici del raffreddamento a liquido sono così attraenti che
fanno dimenticare costi e affanni aggiuntivi.
Inoltre i sistemi a liquido di oggigiorno non sono più solo uno sfizio per
appassionati, ma sono bensì piattaforme provate e rodate. Inoltre il raffreddamento
a liquido non è in realtà così pericoloso come lo si dipinge: certo, c'è sempre un
rischio crescente quando si decide di far scorrere del liquido all'interno del PC, ma
con i sistemi moderni il rischio è sicuramente più basso rispetto gli albori. Per
quanto riguarda la manutenzione, i liquidi utilizzati oggigiorno devono essere
sostituiti molto raramente, al massimo una volta all'anno. Per quanto riguarda
invece il prezzo, sta a voi decidere se maggiori prestazioni e comfort possono
giustificarne il prezzo.
Sitema liquido opzionale di raffreddamento liquido:
Questo sistema è usato per quelli che non vogliono cambiare case , e consiste nel
posizionare un sitema opzionale di raffreddamento liquido "pompa e vaschetta"
all'interno del case però questo potrebbe essere molto difficoltoso perchè molti case
non sono progettati per ospitare i vari componenti di un sistema a liquido,e
l'installazione potrebbe essere abbastanza difficoltosa. Tuttavia questa soluzione vi
permette di utilizzare il vostro case preferito senza dover cambiarlo.
Alcuni case con sistema opzionale di raffreddamento liquido interno:
Sitema Raffreddamento liquido Esterno:
La terza opzione per chi vuole raffreddare a liquido il proprio PC odierno è un
sistema a liquido esterno anche se esteticamente è quello piu brutto. In questo tipo
di soluzione, il radiatore, la vaschetta e la pompa sono integrate in un'unità esterna.
Il refrigerante è pompato all'interno del PC verso i componenti da raffreddare, per
poi ritornare nella vaschetta all'esterno del PC. In questo caso lo spazio interno al
case non è un problema, e inoltre è possibile utilizzare anche un radiatore più grosso
e con una maggiore quantità d'acqua, raggiungendo quindi prestazioni superiori
rispetto a un sistema integrato. Il lato opposto della medaglia è che avrete a che fare
con una seconda unità, tutt'altro che comoda da trasportare e da vedere.
Alcuni casi di raffreddamento liquido esterno:
-Installazione del Raffredamento Liquido-
Schema e pianificazione del sistema:
C'è da dire che diversamente dai sistemi ad aria, la configurazione di un sistema a
liquido necessita di una pianificazione del circuito prima dell'installazione, perchè
se non progettato bene prima dell'installazione si possono causare danni e
malfunzionamenti. Il raffreddamento a liquido introduce infatti alcune variabili da
considerare e prendere atto.
Prima di tutto dobbiamo ricordare che l'installazione deve essere progettata per bene
e da una persona competente sia per il percorso che compie il liquido dall'esterno
del case verso l'interno e poi ancora verso l'esterno perchè il tutto deve essere chiaro
e preciso.
Secondariamente dobbiamo assicurarci che il liquido segua una strada tale da
evitare qualsiasi impedimento o problema nel tragitto. Inoltre, considerate che il
liquido si scalda ogni volta che passa all'interno di un waterblock. Se progettiamo il
sistema in maniera tale che il liquido passi prima sulla CPU, poi sul chipset, poi
sulla scheda video e infine sui regolatori di tensione, quest'ultimi saranno
raffreddati da un liquido pre-riscaldato dagli altri componenti. Questo non deve
accadere perche non è una cosa ottimale e utile.Per eliminare questo problema è
buona pratica far scorrere il liquido in due percorsi paralleli. Se progettatiamo bene,
il flusso del liquido sarà meno congestionato e ogni componente potrà ricevere una
parte del refrigerante fresco in parti uguali e costanti avendo cosi un graduato
beneficio a tutto il sistema, se questo non accadesse si avremmo speso dei soldi per
niente per un sistema malfunzionante e scarso di benefici, detto questo passiamo
alla fase successiva.
Il kit Koolance EXOS-2 che ho utilizzato per questo post è progettato per lavorare
con tubi da 3/8 di pollice, e anche il waterblock è dotato di raccordi dalle stesse
dimensioni. Tuttavia i waterblock per chipset e VGA sono progettati per tubi da ¼".
Ciò ci costringe a utilizzare degli adattatori, che ci aiutano anche a suddividere il
flusso del liquido. Un tubo da ¼" porterà il liquido al chipset, mentre l'altro alla
VGA. Dopo che questi componenti sono stati raffreddati, i tubi si riuniranno in un
unico tubo che porterà il liquido nuovamente all'esterno verso l'unità principale
avendo un circolo refrigerante costante e graduato.Sembra più complesso di quanto
lo è realmente; in questo diagramma sotto "disegno" potete vedere come è stato
progettato il circuito per avere meglio un'idea del tutto.
Schema della configurazione liquido refrigerante:
Disegnare un semplice diagramma "schema "quando progettate un sistema a liquido
è un'ottima idea e può aiutarvi durante l'installazione, è come avere una guida da
seguire.
Dopo aver deciso il percorso, potete iniziare a posizionare i componenti su un
tavolo i vari kit per cpu Chip della motherboard e scheda video e tagliate i tubi alla
giusta lunghezza per l'installazione, lasciandoli un po' abbondanti per sicurezza
perchè per tagliarli fate sempre in tempo , però se le tagliate troppo corti non potrete
piu allungarli "se non con dei accessori Opzionali".
Installazione del raffreddamento liquido:
Una volta progettato il tutto e preparato il materiale possiamo installare i
waterblock. Il blocco della CPU utilizza un supporto in metallo da posizionare
dietro il socket. Questo supporto è dotato di flangie in plastica per prevenire corto
circuiti tra i componenti della motherboard . Iniziamo a smontare la motherboard
dal case per installare il supporto , ricordatevi sempre i vari cablaggi "segnatevi da
qulche parte se non siete pratici lo schema dei cavi di connessione Hardisk, dvd,
Cd, sistema PC ,alimentazione, cooler ecc.." onde evitare guasti e
malfunzionamenti:
Supporto per il waterblock della CPU:
Dopo aver tolto la motherboard possiamo anche eliminare il dissipatore posto sul
chipset. Nel nostro caso elencato nel post è la motherboard Biostar P965PT è dotata
di un dissipatore passivo ancorato con dei supporti in plastica, ma cambiano a
seconda del tipo di CPU e di Motherboard.
Chip set Motherboard dopo che abbiamo tolto il dissipatore:
Una volta rimosso dobbiamo attaccare il supporto hardware presente con il
waterblock del chipset cercando di fare molta attenzione io consiglio prima di fare
operazioni sui Pc di utilizzare dei guanti con lattice sia per la sostanza che noi
espelliamo dal corpo e dai polpastrelli e sia anche ond evitare di trasferire energia
ellettrostatica hai componenti del pc " essendo il corpo umano conduttivo", ma
adesso passiamo ad altro.
Dopo aver montato i due supporti con delicatezza come abbiano citato sopra
,possiamo inserire nuovamente la motherboard dentro il case e iniziare ad ancorare i
waterblock della CPU e del chipset. Assicuratevi di pulire la CPU e il chipset dalla
vecchia pasta termica prima di applicare un nuovo velo di pasta termoconduttiva sia
per avere una adeguata termoconduttività e sia perchè è un'operzione che va sempre
eseguita prima di installare qualsiasi sitema di raffreddamento sopra la CPU.
La CPU con i supporti per il waterblock:
Io consiglio per limitare i rischi durante l'installazione per CPU e chipset e
componenti all'interno , potrete collegare i tubi ai waterblock prima di installarli.
Certamente sarà più scomodo e difficile, ma eviterete di schiacciare troppo il
processore e il chipset durante l'azione di pressione e torsione necessaria per inserire
i tubi nei raccordi consentendo una giusta applicazione .
Ora possiamo fissare i waterblock con i sistemi di aggancio di CPU e chipset forniti
col kit d'installazione. Ricordatevi di non stringere troppo le viti. Se applicate
troppa pressione rischierete di distruggere i componenti sottostanti causando un
danno irreparabile alla scheda madre con relativa sostituzione ,quindi stringete ma
non troppo.
Waterblock per CPU e chipset installati e fissati:
Dopo che abbiamo installato i waterblock per CPU e chipset, possiamo inizziare a
lavorare al raffreddamento sulla scheda video . Abbiamo rimosso il dissipatore
originale per rimpiazzarlo con il waterblock come la stessa operazione eseguita per
la motherboard. In questo caso abbiamo rimosso anche il dissipatore posto sui
regolatori di tensione per applicare il secondo waterblock. Successivamente
abbiamo collegato i tubi "sempre per il motivo di facilitazione collegandoli in un
secondo momento!!" e infine inserito la scheda nell'apposito slot della scheda video
nella motherboard.
Ecco la scheda Video con entrambi i waterblock installati correttamente:
Una volta installati tutti i waterblock possiamo iniziare a collegare i tubi e i raccordi
rimanenti. L'ultimo tubo che dovrete collegare sarà quello di ritorno verso l'unità
centrale esterna come raffigurato nello schema scritto precedentemente mi
raccomando non fate confusione coi vari tubi e raccordi. Controllate, prima di
collegare l'unità centrale, la direzione del flusso del liquido sempre come c'è
raffigurato nello schema.
Questo è il waterblock completo:
Adesso dobbiamo riempire il circuito con il liquido refrigerante. Assicuratevi di
riempire la vaschetta fino al livello indicato dal produttore per non causare
malfunzionamenti o danni vari.. Riempiendo la vaschetta, pian piano il liquido
inizia a scorrere anche nei tubi. Controllate tutti i raccordi e tenete un panno
assorbente a portata di mano nel caso in cui si verificasse qualche perdita. Al primo
cenno di perdita, smettete di riempire il circuito e risolvete il problema mi
raccomando tutta l'operazione va eseguita con calma e cautela senza accensione del
pc.
Dove riempire il circuito:
Adesso che abbiamo installato tutti i componenti perfettamente e che non ci sono
perdite, dobbiamo rimuovere le bolle d'aria dal circuito. Nel caso del Koolance
EXOS-2 è possibile effettuare questa operazione accendendo "solo ORA"il sistema
per far fluire il liquido in tutto il circuito.Lasciate andare il sistema per un po' e
scuotete lievemente e in maniera adeguata il case in modo tale da far fluire tutte le
bolle d'aria espellendole. A pratica ultimata, molto probabilmente vi renderete conto
che dovrete aggiungere ancora un po' di liquido per raggiungere il livello di
sicurezza indicato dal produttore sulla vaschetta . Dopo circa dodici minuti non si
dovrebbero più vedere delle bolle d'aria nel circuito. Adesso finalmente è arrivato il
momento di accendere il vostro PC raffreddato a liquido.
Il Vostro PC Raffreddato a liquido:
Copyright ComputerDexstex