MODELLAZIONE 3D DELL’AMBIENTE URBANO MEDIANTE INTEGRAZIONE DI
SCANSIONI LASER AEREE E TERRESTRI: L’ESEMPIO DEL CASTELLO DI GORIZIA
D. Visintini, B. Fico, A. Spangher
Dipartimento di Georisorse e Territorio, Università degli Studi di Udine, via Cotonificio 114, I-33100 Udine
[email protected]; [email protected], [email protected] - http://geomatica.uniud.it
KEY WORDS: Laser scanning, Rilevamento aereo, Rilevamento terrestre, Integrazione di dati, Modellazione 3D.
RIASSUNTO
In questo articolo sono descritti i diversi aspetti metodologici e operativi della modellazione 3D del Castello di Gorizia, ottenuta
dall’integrazione di scansioni laser e immagini digitali, entrambi acquisiti sia con tecniche di rilevamento aereo che terrestre.
Per quanto riguarda i dati aerei, il rilevamento è stato eseguito da elicottero con il sistema laser Optech ALTM 3033 accoppiato ad
una camera metrica digitale Rollei DB44 sull’intero centro storico di Gorizia. L’elaborazione è stata effettuata con il software
TerraScan (Terrasolid) che ha permesso nell’ordine le operazioni di filtraggio dei punti, di classificazione degli stessi e di
modellazione tridimensionale di 355 edifici. Mediante il software complementare TerraPhoto è stata invece prodotta l’ortofoto ad
alta risoluzione (1 pixel pari a 0,20 m) per proiezione proprio sul DSM laser, quest’ultimo ottenuto con il software TerraModeler.
In corrispondenza del castello medioevale di Gorizia è stata sperimentata l’integrazione tra dati laser aerei e terrestri, questi ultimi
acquisiti con il sistema laser Riegl LMS Z360i integrato con una camera metrica digitale Nikon D100. Per la registrazione e la
georeferenziazione di queste scansioni sono stati utilizzati dei target riflettenti, rilevati con stazioni totali da una rete topografica con
quattro vertici misurati anche con ricevitori GPS Leica System 520. Mediante il software RiSCAN Pro (Riegl), tutte le scansioni
sono state quindi georeferenziate direttamente nel sistema Gauss-Boaga, nel quale è riferito il rilevamento aereo.
I dati terrestri sono stati quindi importati in ambiente TerraScan e viceversa quelli aerei in ambiente RiSCAN Pro, per gestire al
meglio la nuvola complessiva (36 milioni di punti) e ottenere automaticamente degli elaborati (nuvole di punti colorate,
sezioni/profili, superfici/modelli poliedrici, ortofoto texturizzate) di elevato contenuto informativo e di ottimo aspetto fotorealistico.
Tutta l’intera modellazione 3D di questo complesso ed articolato ambiente urbano è stata infine resa fruibile in ambienti di realtà
virtuale: si possono così eseguire delle avvincenti navigazioni all’esterno e all’interno del Castello sia di tipo interattivo, in ambiente
VRML, sia lungo delle traiettorie predefinite, creando quindi dei filmati AVI multimediali. In questo modo l’utente può analizzare e
sfruttare al meglio l’enorme contenuto informativo acquisito.
ABSTRACT
In this paper the 3D modeling of the urban-historical environment of the Castle of Gorizia, obtained by integrating aerial and
terrestrial laser scans and digital imaging data, is described.
The aerial data have been acquired by a helicopter equipped with an Optech ALTM 3033 laser system coupled with a Rollei DB44
metric camera. The laser data have been processed by the TerraScan (Terrasolid) software, making possible the point filtering, the
point classification, and the 3D modeling of 355 buildings of the Gorizia downtown. By projecting the aerial images on the DSM
laser, thanks to the TerraPhoto and TerraModeler software, the high resolution (0,20 m pixel) digital orthophoto has been produced.
For the medieval Castle of Gorizia the integration between aerial and terrestrial data has been carried out: terrestrial scans have been
acquired with a Riegl LMS Z360i system laser integrated with a Nikon D100 metric camera. These scans has been mutually
registered and globally georeferenced by exploiting reflecting targets, surveyed by total stations from a topographic network. Thanks
to GPS differential measures with a Leica System 520 receiver on four network vertexes, the targets (and the scans) have been so
directly georeferenced in the Gauss-Boaga cartographic system, the same datum of the aerial surveying.
The terrestrial data have been imported in the TerraScan environment, while the aerial ones in the RiSCAN program, so to fine
manage the global cloud (36 millions of points) and suitably exploit the software tools to automatically obtain a large number of
numerical products as colored point clouds, vector sections and profiles, TIN surfaces, and digital image texturing. Furthermore, all
these 3D products have been made available to the user by very realistic virtual navigations, either interactively in VRML or along
predefined tours by AVI files. In this way, the user can well study and better exploit the large amount of information so acquired.
1. INTRODUZIONE
La documentazione esaustiva e l’analisi dettagliata di oggetti più o meno complessi, sia nel caso di un singolo edificio (bene
architettonico-culturale), sia nel caso di un ambiente urbano (spazio edilizio-urbanistico) costituiscono gli scopi principali del
rilievo. Oggigiorno, visto che le nuove ed avanzate tecnologie di acquisizione dei dati garantiscono livelli di precisione, velocità e
versatilità straordinari, anche la stessa componente geometrica del rilievo (rilevamento) non può più essere considerata soltanto una
semplice misurazione dimensionale. In altri termini, le moderne strumentazioni di rilevamento integrato laser-fotogrammetrico
producono una mole così grande di informazioni geometriche e materiche che permettono, già di per se stesse, la conoscenza e
l’interpretazione dei valori formali, costruttivi e tecnologici dell’opera. Il rilievo, se concepito e realizzato come uno strumento
informativo dinamico, è capace di sviluppare un processo esauriente di conoscenza critica e di rappresentare nel modo più oggettivo
lo “stato di fatto” per ogni successiva operazione di conservazione, di restauro e di progetto.
Nel campo del rilevamento urbanistico-architettonico, lo sviluppo dei sistemi laser, iniziato una decina di anni fa, ha oggi raggiunto
piena maturità sia dal punto di vista tecnologico che operativo, costituendo una tecnica già significativamente diffusa per diversi
campi di applicazione. In questo articolo si analizza quindi tale rilevamento laser, sia aereo che terrestre, e la sua ottimale fusione
con le immagini di rilevamento fotogrammetrico. Viene poi esaminato il problema di integrare i dati laser aerei con quelli terrestri,
considerando prima le diverse possibilità operative e trovando poi una soluzione concreta per il rilevamento del Castello di Gorizia,
fulcro del centro storico sebbene isolato su un colle, descritto nelle singole fasi di acquisizione, trattamento ed elaborazione dei dati.
Nello studio del rilevamento laser aereo, la letteratura scientifica è assai vasta ed i primi riferimenti sono stati pubblicati già alla fine
degli anni ’90: in questo articolo si ricorda il recente volume edito dal CISM di Udine “La tecnica del Laser Scanning: teoria e
applicazioni” (a cura di Crosilla e Galetto, 2003) e le esperienze maturate dal nostro gruppo di ricerca presentate al convegno SIFET
di Chia Laguna nella relazione invitata “Esperienze di filtraggio, classificazione, segmentazione e modellazione di dati laser aerei”
(Crosilla, Visintini, Prearo e Fico, 2005). Per quanto riguarda il laser terrestre, di sviluppo e diffusione un po’ più recenti, qui si cita
soltanto il recentissimo volume, sempre edito dal CISM, “Laser Scanning terrestre” (a cura di Crosilla e Dequal, 2006). Meno
esplorato risulta invece il processo di integrazione tra i metodi aerei e terrestri, la cui nostra prima esperienza è stata riassunta
nell’articolo “A 3D virtual model of the Gorizia downtown (Italy) by matching aerial and terrestrial surveying techniques”
(Visintini, Fico, Crosilla e Guerra, 2005). Dal punto di vista analitico, il requisito fondamentale dell’integrazione è l’opportuna
georeferenziazione delle scansioni terrestri, come si può intuire e come sarà illustrato in seguito: si rimanda allora ai recenti articoli
“Georeferencing of terrestrial laserscanner data for applications in architectural modelling” di Schuhmacher e Böhm (2005) e
“Analisi delle precisioni ottenibili nella determinazione di punti con laser scanning terrestre utilizzando la georeferenziazione
diretta” di Alba, Giussani, Roncoroni e Scaioni (2005).
2. TECNICHE DI RILEVAMENTO AEREO
2.1 Scansioni laser
Oggigiorno la scansione laser aerea è senza dubbio la metodologia più avanzata nel campo del rilevamento territoriale, soprattutto
grazie allo straordinario livello di efficienza e di automazione, che derivano da un’elevatissima frequenza di campionamento
(superiore ai 100.000 punti/sec), da una precisione decimetrica e da una notevolissima densità di acquisizione di punti (fino a 10-20
punti al metro quadrato). Questa tecnologia di rilievo è ormai ampiamente utilizzata per svariate applicazioni di tipo territoriale, tra
le più interessanti delle quali vi sono sicuramente quelle urbanistiche (Forlani, in CISM 2003). Grazie ai dati acquisiti e alle ottime
prestazioni degli attuali software dedicati al loro processamento è infatti possibile realizzare modelli 3D dell’edificato urbano (3D
City Models) sia molto estesi che molto dettagliati. Di seguito sono brevemente descritte le fasi di elaborazione eseguite, illustrate da
figure relative a circa 2 milioni di punti. Si tratta di un’area di 236x647 m, con una notevole variazione altimetrica (100 m),
comprendente il colle del castello medievale di Gorizia che si eleva di circa 70 metri gia rispetto alla sottostante piazza principale
della città. I programmi utilizzati sono i pacchetti software TerraScan®, TerraModeler® e TerraPhoto® prodotti dalla Terrasolid
(www.terrasolid.com) e disponibili come applicazioni dedicate in ambiente MicroStation (Bentley).
1) Acquisizione dei dati
Come noto, il rilevamento avviene per mezzo di un sensore laser aviotrasportato, integrato con sensori di posizionamento/assetto
GPS/INS, che emettendo (e ricevendo) dei segnali scansiona l’area sorvolata trasversalmente rispetto alla direzione di volo.
L’acquisizione dei dati è caratterizzata da alcuni fondamentali parametri, definiti in fase di progettazione delle “strisciate”, quali la
frequenza di emissione dell’impulso laser (e quindi di acquisizione delle misure), l’altezza relativa di volo, il numero di risposte
memorizzate (che dipende dal tipo di sensore adottato) e la ampiezza angolare della scansione. La combinazione di questi valori
determina la densità di campionamento e influenza in modo decisivo la produttività del rilievo, il rischio di occlusioni prospettiche e
la variabilità di precisione del posizionamento dei punti (Casella, in CISM 2003).
Le scansioni laser aeree relative all’intero centro storico di Gorizia sono state effettuate nell’aprile del 2004 con un elicottero dalla
società Helica s.r.l. (www.helica.it) di Amaro (Udine) utilizzando un sistema ALTM (Airborne Laser Terrain Mapper) 3033 della
Optech (www.optech.on.ca). Complessivamente è stata rilevata un’area di 1,66 kmq mediante 14 strisciate incrociate con una
densità media di campionamento pari a 7 punti/mq per un totale di più di 20 milioni di punti. La sovrapposizione tra le diverse
strisciate ha permesso di eliminare gran parte delle occlusioni prospettiche e di raggiungere nel complesso una densità media pari a
15 punti/mq.
2) Georeferenziazione dei dati
La fase successiva di georeferenziazione dei dati rappresenta il momento fondamentale dell’intero rilevamento ed è ottenuta da una
opportuna combinazione di rotazioni e traslazioni tridimensionali. In questo modo si può georeferenziare direttamente il generico
punto acquisito rispetto ad un sistema di riferimento globale (WGS84 o cartografico), in quanto istantaneamente misurati la
posizione e la rotazione sia del sistema di riferimento del laser sia dei sensori inerziali rigidamente fissati a bordo. La posizione 3D
di ogni punto dipende dalla combinazione di ben sei quantità tridimensionali, quattro delle quali variano istantaneamente (la
posizione del ricevitore GPS, l’assetto del sensore INS, la distanza del raggio laser e la rotazione dello specchio che riflette il
raggio): per questo, la precisione finale può essere variabile, anche all’interno della medesima strisciata. Il risultato finale della
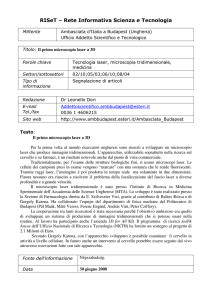
georeferenziazione dei dati acquisiti è quindi la creazione di un’unica “nuvola di punti” (Figura 1 a sinistra) la cui densità è talmente
elevata, come nel caso in oggetto, che l’aerea sorvolata appare rilevata in modo pressoché “continuo”.
3) Allineamento delle strisciate
Poiché la georeferenziazione dei punti è isodeterminata, si possono verificare degli errori dovuti sia ad errori sistematici
nell’orientamento fornito dei sensori GPS/INS che alla misura distanziometrica/angolare del laser. Questi errori si evidenziano nelle
zone comuni alle varie strisciate e possono essere opportunamente minimizzati mediante il cosiddetto “allineamento” delle strisciate
25 m
25 m
25 m
per mezzo di vincoli analitici di congruenza e/o procedendo ad una ricalibrazione del sistema laser. In questo modo, mediante
piccole roto-traslazioni delle diverse strisciate, si introducono delle correzioni decimetriche nelle nuvole di punti, migliorando la
congruenza nelle zone di sovrapposizione tra strisciate parallele o incrociate (Beinat e Crosilla, in CISM 2006). Le coordinate 3D
finali dei punti avranno così un valore che meglio si approssima a quello reale (Figura 1 a destra) e le diverse strisciate avranno
posizioni reciproche che permettono la generazione di superfici praticamente continue.
La georeferenziazione e l’allineamento delle strisciate relative a questo lavoro sono state realizzate dal gruppo di ricerca
“Cartografia e Telerilevamento” dell’Istituto Nazionale di Oceanografia e di Geofisica Sperimentale (www.inogs.it) di Trieste:
l’output è costituito da file in formato binario contenenti le coordinate Gauss-Boaga Est, Nord, la quota e il valore di intensità dei
punti.
25 m
25 m
25 m
Figura 1: A sinistra, la nuvola georeferenziata; a destra, i punti dopo l’allineamento, colorati per valore di quota (dal blu al rosso).
4) Filtraggio dei punti
La fase successiva è il cosiddetto “filtraggio” che ha come obiettivo l’individuazione dei punti laser appartenenti al terreno (Figura 2
a sinistra). Analiticamente, il filtraggio consiste nella stima del terreno definito come una superficie continua e regolare
caratterizzata da alcuni parametri geometrici (pendenza massima ammissibile, scarti in quota accettabili, ecc.), mentre i punti
appartenenti a edifici, vegetazione, macchine e oggetti sovrastanti tale superficie sono considerati come misure affette da outliers o
errori grossolani e sono quindi individuati e rifiutati (filtrati). In letteratura, esistono diversi algoritmi basati su funzioni
matematiche, statistiche o geometriche (Vosselman, in CISM 2003). Per l’elaborazione dei dati a disposizione per questo lavoro è
stato utilizzato un algoritmo di tipo geometrico locale (Axelsson, 2000), implementato in TerraScan, che si basa sulla cosiddetta
“densificazione iterativa di elementi TIN (Triangulated Irregular Network)”. In modo completamente automatico, sono stati così
individuati ed isolati 7.844.031 punti-terreno sul totale di 20.353.673 punti laser acquisiti, che corrispondono a circa il 40% in una
zona prevalentemente pianeggiante, ma più ondulata verso il confine di Stato, dalla quale si eleva un colle in parte urbanizzato
(Borgo Castello) e in parte ricoperto da alta vegetazione. Utilizzando l’applicazione complementare TerraModeler, a partire dai
punti-terreno è stato ricostruito il modello digitale del terreno (DTM) mediante modellazione con maglie triangolari (TIN).
25 m
25 m
25 m
5) Classificazione dei punti
I punti non appartenenti al terreno vanno successivamente classificati, ovvero assegnati ad un certo numero di classi, definite
dall’utente, sfruttando procedure semi-automatiche che implementano appropriati criteri di omogeneità dei punti (Roggero, in CISM
2006). Come è possibile osservare dalla Figura 2 a destra, il risultato finale di questa analisi multicriteriale è una suddivisione della
nuvola dei punti “non terreno” in diverse classi (quattro nel nostro caso: terreno, edifici, vegetazioni e automobili). Ad esempio, si
può valutare la quota del punto rispetto al terreno, il valore dell’intensità del segnale laser riflesso che varia a secondo del materiale
della superficie scansionata, la differenza altimetrica tra il punto corrispondente al primo e all’ultimo segnale riflesso, ecc. ...
25 m
25 m
25 m
Figura 2: A sinistra, i punti laser filtrati: verde = terreno, bianco = non terreno; a destra, il risultato della classificazione:
rosso = edifici, verde chiaro = vegetazione, giallo = automobili.
Dei circa 20 milioni di punti acquisiti, 5.819.591 sono stati classificati come punti-edificio, 5.287.675 come punti-vegetazione,
237.304 come punti-automobili, mentre poco più di un milione di punti sono rimasti non classificati, fra i quali una minima parte
sono da considerarsi errori di misura. Per interpolazione dei punti-terreno e dei punti-edificio è stato ottenuto il modello digitale
dell’elevazione (DEM), cioè quella particolare superficie, di interesse ingegneristico, passante soltanto per il terreno e gli edifici.
25 m
4m
25 m
6) Modellazione degli edifici
L’operazione finale è la modellazione degli edifici che può avvenire secondo due approcci metodologici opposti: “knowledge
driven” o “data driven” (Roggero, in CISM 2006). Nel software TerraScan è implementata la seconda modalità che genera quindi
una modellazione “generica” o “non parametrica” del solido edificio: non è richiesta alcuna ipotesi di forma o di vincolo
sull’oggetto e si sfruttano esclusivamente le informazioni contenute nei dati laser (Vosselman e Dijkman, in CISM 2003). A partire
dai punti classificati come edificio, è infatti possibile individuare in maniera automatica l’insieme di quelli che appartengono ad una
falda (segmentazione) considerando la pendenza locale e condizioni di adiacenza degli stessi. Tali punti, così delimitati da una
polilinea tridimensionale, sono poi utilizzati per stimare il piano medio mediante interpolazione ai minimi quadrati. La corretta
topologia dell’intero tetto dell’edificio è poi ricostruita considerando le relazioni di adiacenza che intercorrono tra i diversi piani di
falda, così da stimare la posizione coerente delle linee di gronda, di colmo e di ciascun vertice. Quest’ultima operazione è condotta
iterativamente in modo manuale, sfruttando tuttavia una serie di comandi di “editing assistito” ed utilizzando, se disponibile,
un’ortofoto come sfondo o eventuali informazioni contenute nella cartografia numerica esistente. L’altezza dell’edificio è calcolata
come differenza tra la quota dei punti-terreno circostanti l’edificio e la quota dei vertici delle falde. In questo modo, sono stati
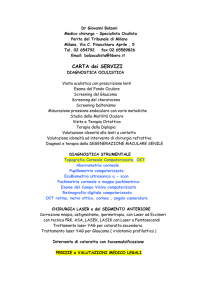
ricostruiti 355 edifici di diverse forme, dimensioni e complessità del centro storico di Gorizia: in Figura 3, a sinistra sono raffigurati
i modelli poliedrici ottenuti per gli edifici dell’intero colle, mentre a destra il solo edificio del Castello. La tipologia variabile e
complessa di gran parte degli edifici (prevalentemente di edilizia storica) e la presenza di elementi geometrici assai ridotti (abbaini e
piccole falde) ha reso spesso problematica l’individuazione ed il soddisfacimento della topologia delle coperture. Ciò nonostante,
come riportato in un precedente articolo (Visintini e Fico, 2005), il livello di dettaglio e di precisione ottenuti in questa ricostruzione
sono estremamente elevati e confrontabili con quelli raggiungibili con un rilevamento topografico mediante stazione totale.
25 m
4m
4m
Figura 3: A sinistra, il DTM laser e i modelli solidi degli edifici del colle del Castello; a destra, particolare del Castello di Gorizia.
2.2 Integrazione con immagini fotogrammetriche
25 m
25 m
25 m
Già a partire dalla nube di punti laser indifferenziata, visualizzata a toni di grigio in base al valore di riflettività memorizzato dal
sensore (vedi Figura 4 a sinistra), dal rilievo laser è possibile ottenere delle immagini “raster” dell’oggetto acquisito; queste
informazioni radiometriche risultano però di scarsa utilità pratica, dal momento che la luce laser è monocromatica e richiede
comunque un adeguato modello matematico di calibrazione dei valori misurati. Risulta quindi praticamente necessario integrare al
rilievo laser le importanti informazioni descrittive e geometriche che si possono ricavare da immagini digitali a colori acquisibili con
una camera ad alta risoluzione, metrica o non, montata a bordo del velivolo. Nel caso del rilievo di Gorizia, durante il rilevamento
laser, sono state infatti acquisite 153 immagini digitali ad alta risoluzione mediante una camera metrica DB44 (lunghezza focale 50
mm, formato 4.080x4.076 pixel) della Rollei (www.rollei.de) opportunamente interfacciata al sistema laser/GPS/INS.
L’ortofoto digitale è senza dubbio oggigiorno il prodotto cartografico standard che si ottiene dalle immagini aeree: l’orto-proiezione
è infatti possibile perché sono noti sia i parametri di orientamento esterno della camera, perchè direttamente misurati dai sensori
GPS/INS, che il DSM grazie al laser. Mediante il software TerraPhoto, dalle 153 immagini è stata prodotta l’ortofoto ad alta
risoluzione di Gorizia suddivisa in 36 file di 2.000x2.000 pixel, equivalenti a 400x400 m, in quanto 1 pixel corrisponde a 20 cm.
25 m
25 m
25 m
Figura 4. A sinistra, i punti laser visualizzati a toni di grigio in funzione del valore di intensità; a destra, gli stessi colorati in base al
colore RGB estratto dall’ortofoto aerea.
Nelle aree urbane, a causa delle numerose break-lines che caratterizzano il DSM e delle zone d’ombra presenti nelle immagini, è
preferibile una procedura più sofisticata che produce la cosiddetta “true-orthophoto” (Dequal e Lingua, 2002). Il problema delle
break-line è risolto se si utilizza un DSM a partire da una grande mole di punti (il cosiddetto “dense DSM”, DDSM) in modo tale
che anche l’oggetto più complesso possa essere descritto accuratamente; sono quindi necessari rilievi laser ad alta/altissima densità
di campionamento. Per ovviare invece alla mancanza di informazioni nelle zone d’ombra delle immagini, bisogna ricorrere a tutte le
immagini acquisite disponibili per una medesima aerea e prese da diversi punti di vista, mettendo in atto una procedura multi-image.
Un interessante utilizzo delle ortofoto è l’estrazione dei valori RGB dei suoi singoli pixel da assegnare al punto di coordinate
cartografiche corrispondenti, in modo da poter colorare la nuvola di punti come nella Figura 4 a destra.
L’ortofoto risulta essere inoltre uno strumento fondamentale come supporto all’utente nei processi di filtraggio, di classificazione e,
soprattutto, di modellazione. In particolare, come già accennato, un’ortofoto come “sfondo” può essere davvero utile per verificare
iterativamente e aggiustare le forme più complesse e soddisfare la corretta topologia di coperture con molte falde.
Un altro uso conveniente delle ortofoto è quello di colorare (texturizzare) i modelli di superficie (DTM e DSM) o poliedrici (edifici,
3D City Models) al fine di ottenere rappresentazioni miste raster/vector di notevole effetto fotorealistico, come si vedrà di seguito.
3. TECNICHE DI RILEVAMENTO TERRESTRE
3.1 Scansioni laser
Il rilevamento laser terrestre si effettua posizionando lo strumento su un treppiede in posizione fissa, con un procedimento analogo a
quello utilizzato per le stazioni totali topografiche, con la differenza che la maggior parte dei sistemi non possiede una livella per
rendere perfettamente verticale lo stesso sensore. Da tale “stazione” la scansione dello spazio circostante è ottenuta grazie ad un
movimento rotatorio controllato lungo due assi tra loro ortogonali (più o meno ampio a seconda dei modelli), imponendo così
istantaneamente la direzione angolare di emissione (e ricezione) del raggio laser, da cui viene immediatamente calcolata la posizione
X,Y,Z dei punti rispetto al centro del sistema. Anche nei laser scanner terrestri viene memorizzata un quarto parametro dato
dall’intensità del segnale ricevuto, il cui valore numerico può essere utilizzato per scopi di classificazione solo dopo un’opportuna
correzione/calibrazione che lo trasforma in “riflettività” o “pseudo-riflettanza” (Coren et al., 2005), ancora più necessaria del caso
aereo vista la sua dipendenza dalla distanza laser-punti assai più variabile nel caso terrestre.
Gli strumenti laser terrestri si differenziano in base alla loro portata, che può variare a seconda del principio di misura
(distanziometrico o “per triangolazione”) e del modello impiegato (Rinaudo, in CISM 2003; Bornaz in CISM 2006; Boehler e
Marbs, in CISM 2006): nota la portata del laser con cui si opera, si decide quante scansioni fare e in che posizione effettuarle.
Lo strumento viene collegato generalmente ad un computer portatile o palmare ed è così comandato da un software, grazie al quale
si impostano la velocità di acquisizione, la risoluzione e il campo angolare di scansione, la divergenza del raggio laser, ecc..
1) Creazione di una rete di appoggio topografico
Una volta scelte le stazioni di scansione è necessario individuare i punti più adatti in cui applicare i target (marker) riflettenti per la
registrazione e la georeferenziazione delle stesse. Per quest’ultimo scopo è necessario rilevare topograficamente tali punti che
materializzano così una rete di appoggio: questa fase non rientra quindi strettamente nell’operazioni del rilievo laser ma è comunque
un fattore fondamentale, in quanto da esso dipende la corretta georeferenziazione dei dati laser. Una volta collocati i target si
procede alla loro misurazione topografica mediante collimazione con stazione totale EDM: spesso per questioni di praticità si
procede per semplice celerimensura (misurando distanza, angolo azimutale e zenitale) invece che per intersezione
angolare/distanziometrica multipla. I target potrebbero essere anche naturali, costituiti da vertici di oggetti facilmente riconoscibili,
ma quelli artificiali, costituiti da adesivi di materiale ad alta riflettività (generalmente vicino al 100%), sono di gran lunga preferibili
in quanto difficilmente possono essere equivocati perchè di dimensioni standard e di forma regolare.
Il rilevamento del Castello di Gorizia è stato effettuato in due campagne successive: la prima, eseguita nel maggio del 2005, ha
interessato la Corte dei Lanzi, ovvero la corte interna del Castello (vedi Figura 5 a sinistra); la seconda, svolta nel febbraio del 2006,
ha avuto invece come oggetto di interesse lo spazio interno della sala principale del Castello, cioè l’antica Sala degli Stati
Provinciali, e la salita che va dalla porta di ingresso delle mura (vedi Figura 6 a sinistra) al mastio principale. In totale sono stati
posizionati 87 target (vedi Figura 7 a sinistra), cercando di soddisfare le seguenti caratteristiche:
• visibilità da più posizioni di scansione;
• distribuzione omogenea sulle superfici da rilevare;
• buona collimabilità dai vertici della rete topografica.
Per questioni di tempo è stato possibile rilevare 65 punti su 87: 22 target sono quindi utilizzati solo per la registrazione e non per la
georeferenziazione. In particolare, con la stazione totale Leica TCRA 1103 sono stati rilevati 27 punti per la salita e 16 punti per la
Sala degli Stati Provinciali, mentre i 22 punti della Corte dei Lanzi sono stati rilevati con la stazione totale Topcon GTS 303.
2) Acquisizione dei dati laser
L’acquisizione dei dati laser è stata effettuata con il sistema LMS (Laser Measurement System) 360i della Riegl (www.riegl.com) di
proprietà del Laboratorio di Fotogrammetria del Centro di Rilievo, Cartografia ed Elaborazione dell’Università IUAV di Venezia.
Sia l’acquisizione che le successive elaborazioni sono state svolte con il programma RiSCAN PRO®, fornito assieme allo strumento:
sono state eseguite ben 18 scansioni: 7 per la corte, 9 per la salita e 2 per la sala, le cui caratteristiche principali sono le seguenti:
• angolo verticale di scansione: 90° (massimo) per tutte;
• angolo orizzontale di scansione: 360° (panoramiche) per 9 scansioni, 180° per 4 scansioni, 220°, 150°, 100°, 90° e 70°;
• risoluzione angolare verticale e orizzontale: 0,10° per 11 scansioni, 0,12° per 4 scansioni e 0,20° per 3 scansioni;
• punti acquisiti: da un minimo di 577.514 (per 1 scansione) a un massimo di 3.240.000 (per 7 scansioni);
• tempo di scansione: da un minimo di 0’45” (per 2 scansioni) a un massimo di 5’59” (per 7 scansioni).
In totale sono stati acquisiti oltre 34 milioni di punti, impiegando complessivamente 1 h 4’17” come tempo di scansione (frequenza
media 8.870 punti/s) che costituisce (purtroppo!) una frazione minima nella durata complessiva di un rilevamento laser.
3) Registrazione delle scansioni
A differenza del caso aereo, le coordinate rilevate dal sistema laser si riferiscono al centro dello strumento stesso e perciò, nel caso
comune di più scansioni, le stesse vanno quantomeno “registrate” (Beinat, in CISM 2006; Guarnieri e Vettore, in CISM 2006), cioè
riferite ad un unico sistema di riferimento locale (vedi Figura 5 a destra), che può essere quello della scansione “baricentrica”
rispetto alle altre. Dal punto di vista analitico, si tratta di stimare per ogni scansione i 3+3 parametri della trasformazione di rototraslazione rigida nello spazio sulla base di un numero sufficiente di punti comuni (omologhi) alle scansioni. È evidente che fra tutti
i possibili punti, si utilizzano proprio i target poiché ben distribuiti fra le scansioni e, soprattutto, riconoscibili automaticamente. Per
ottenere buone stime dei parametri, le scansioni adiacenti devono ricoprirsi per almeno il 30% ed in questa area si devono trovare un
numero sufficiente di target. Il loro riconoscimento avviene in maniera automatica sulla base di una soglia di riflettività, addirittura
direttamente in campagna tramite la maggior parte dei software esistenti: una volta riconosciuti è tuttavia necessario un controllo,
poiché spesso vengono assunti come target degli oggetti particolarmente riflettenti (segnali stradali e oggetti metallici) o, viceversa,
non vengono individuati i target molto distanti. I punti rilevati vanno quindi denominati e non esiste una regola precisa che indichi
come procedere, ma sta nella logica dell’operatore assegnare ad ogni punto un nome facilmente riconoscibile. È tuttavia conveniente
procedere in modo univoco, assumendo i nomi scelti (e dettagliati nelle monografie) durante il rilievo topografico degli stessi punti.
Figura 5: A sinistra, il sistema Riegl Z360i utilizzato per le scansioni terrestri; a destra, la nuvola complessiva delle 7 scansioni
relative alla Corte dei Lanzi dopo la loro registrazione.
In questo modo è risolto il problema dell’individuazione dei punti omologhi sulle diverse strisciate: ripetendo questo criterio per
ogni scansione, si fa in modo che ogni scansione sia registrata rispetto alle adiacenti (pairwise registration) oppure che siano tutte
unite tra loro (global registration), comunque a formare un’unica nuvola di punti. È possibile anche individuare automaticamente le
corrispondenze fra almeno tre punti target con una procedura che considera le cosiddette “matrici di adiacenza” (Beinat, in CISM
2006) che va a confrontare tutte le coordinate globali ricavate permutando le combinazioni e assume come corretta quella che
fornisce lo scarto quadratico minimo delle differenze.
4) Trattamento dei dati acquisiti
Una volta ottenuta una nuvola complessiva di tutti i punti acquisiti, non si procede in cascata, come nel caso aereo, alle fasi
“standardizzate” di filtraggio, classificazione e modellazione, perché ogni particolare oggetto-edificio rilevato può presentare sue
proprie caratteristiche geometriche e costruttive difficilmente elaborabili da software “universali” di processamento. In altri termini,
torna qui la distinzione che esiste in fotogrammetria fra rilevamento territoriale aereo, per la produzione di cartografia numerica ben
definita mediante i capitolati speciali, e rilevamento architettonico terrestre, per la realizzazione di elaborati grafico-numerici assai
variabili a seconda del tipo di bene storico-architettonico in esame (vedi esempi in Guerra e Balletti, in CISM 2006).
Alle scansioni terrestri si applicano allora procedure di carattere generale, senza (poter) entrare nel merito del particolare oggetto che
si sta considerando: si parla allora generalmente di pulitura, di “filtraggio” e di ricampionamento dei dati.
La pulitura dei dati può avvenire sia per via manuale che automatica: è conveniente procedere prima in via automatica e poi, nel
caso in cui non siano stati eliminati i punti inutili e/o grossolanamente errati, in via manuale mediante i comandi di selezione e di
modifica offerti dal programma di elaborazione. Il software RiSCAN PRO permette sia di eliminare automaticamente i punti isolati
che di considerare come uno stesso punto quei punti di coordinate praticamente coincidenti (in base ad una tolleranza prefissata).
I dati così ripuliti vengono ulteriormente ridotti mediante un processo di “filtraggio”, applicando uno o più dei seguenti criteri:
• range gate: si accettano solo i punti all’interno di una certa distanza, definita in base alle dimensioni massime dell’oggetto;
• intensity gate: si accettano solo i punti con un dato intervallo di intensità;
• octree: questa procedura si basa su un metodo di tipo octree, ovvero si considera un cubo di dimensioni da definire che a
sua volta è suddiviso in otto cubi di dimensioni sempre più piccole fino a quando ogni cubo contiene un solo punto;
• point filter: viene considerato soltanto un punto ogni n, con n definito dall’utente.
Infine, l’ultima elaborazione che si può compiere è il ricampionamento dei dati che è definito da parametri geometrici quali:
• il passo di soglia;
• la risoluzione angolare orizzontale;
• la risoluzione angolare verticale.
Tramite il ricampionamento i punti vengono distribuiti su un grigliato regolare con valori di coordinate e di intensità ottenuti come
valore medio di quelli acquisiti, eliminando così i rumori di misura. Per le scansioni del Castello sono state eseguite le operazioni di
pulizia automatiche e manuali, le operazioni di filtraggio con il metodo octree ed il ricampionamento con risoluzione angolare di
0,20°, ovvero a circa il doppio della risoluzione media delle diverse scansioni. Grazie al ricampionamento le varie nuvole di punti
hanno una densità superficiale più omogenea: dagli oltre 34 milioni di punti acquisiti, si è così prodotto un nuovo dataset di poco più
di 10 milioni di punti, più facilmente visualizzabile ed esplorabile nelle viste 3D, utilizzato soltanto per ottenere elaborati
complessivi dell’intero castello (comunque di notevole livello di dettaglio).
Una volta scelti i punti rappresentanti l’oggetto si crea la superficie TIN (mesh) passante per gli stessi, ottenedo così il DDSM che
può essere migliorato mediante i comandi smooth (lisciatura) e decimate (eliminazione dei triangoli troppo piccoli).
3.2 Integrazione con immagini fotogrammetriche
Come nel caso aereo, anche in quello terrestre è possibile utilizzare immagini digitali ad alta risoluzione per texturizzare la
superficie dell’oggetto rilevato (Dequal, Lingua e Bornaz, in CISM 2006). L’utilizzo di immagini digitali ottenute da una generica
fotocamera della quale non si conoscono la posizione e l’assetto richiede la definizione del corretto legame analitico tra i dati laser e
quelli delle immagini, ovvero la stima dei ben noti parametri di orientamento esterno. Utilizzando invece una camera metrica
rigidamente fissata al sistema laser, si realizza un sensore “ibrido” molto efficiente, conveniente e potente per la generazione
automatica di modelli tridimensionale texturizzati ad alta definizione. La camera acquisisce le immagini ruotando di un angolo
impostato attorno allo stesso asse “pseudo-verticale” del sistema laser: il montaggio rigido permette di conoscere l’eccentricità e la
rotazione della camera rispetto al riferimento laser, l’assetto angolare delle immagini è quindi misurato direttamente (come nei
vecchi fototeodoliti). I dati fotogrammetrici e quelli laser possono quindi essere combinati direttamente e senza alcun intervento
dell’operatore. Si beneficia allora sia dei vantaggi del laser che di quelli della fotogrammetria: si hanno le alte precisioni di misura
tridimensionale fornite dal primo metodo e la descrizione qualitativa dell’oggetto da parte delle immagini fotografiche.
Le immagini digitali relative al Castello sono state acquisite con una camera metrica digitale D100 (lunghezza focale 20 mm,
formato 3.008x3.000 pixel) della Nikon (www.nikonimaging.com) montata opportunamente sullo stesso strumento laser LMS 360i.
Dalle medesime stazioni utilizzate per le scansioni terrestri sono state quindi acquisite ben 186 immagini digitali e, per quanto detto
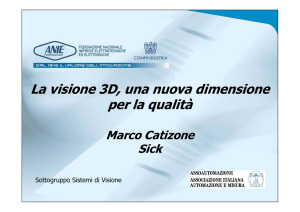
sopra, é stato possibile proiettare il colore RGB di ogni pixel:
• su ogni punto laser, colorando così l’intera nuvola dei punti (Figura 6 a sinistra);
• sulla superficie DDSM laser (texturing) (Figura 6 a destra), passaggio informatico per produrre le ortofoto digitali sui
diversi piani di interesse, quali ad esempio le facciate dei diversi corpi di fabbrica del Castello.
Figura 6: A sinistra, la nuvola colorata della porta di accesso alla salita; a destra, la superficie texturizzata della Corte dei Lanzi.
Il livello di dettaglio e di fotorealismo delle Figure 6 è particolarmente sorprendente: assegnando un certa dimensione ai punti ed
attivando l’opzione di smoothing nella visualizzazione, già le nuvole colorate di punti sembrano delle superfici; con la
texturizzazione del DDSM il grado di realismo è ancora più spinto, fino a farla confondere con fotografie ad altissima definizione.
4. INTEGRAZIONE TRA DATI LASER AEREI E TERRESTRI
Avendo a disposizione un insieme di dati sia aerei che terrestri si è voluta indagare la possibilità di integrarli opportunamente tra
loro, al fine di creare un unico insieme di elevata completezza e dettaglio. Per risolvere analiticamente e praticamente il problema
dell’integrazione è necessario che entrambi i rilievi siano riferiti allo stesso sistema di riferimento e quindi, nel nostro caso, nel
riferimento cartografico Gauss-Boaga. Mentre i punti laser aerei lo sono già dopo la georeferenziazione (punto 2.1.2) e
l’allineamento (punto 2.1.3), per i punti terrestri la condizione di posizionamento cartografico non è valida, perché dopo la
registrazione (punto 3.1.3) le scansioni sono sì riferite ad un unico sistema, ma di carattere locale: le scansioni terrestri vanno quindi
opportunamente georeferenziate. Riprendendo il concetto fotogrammetrico di georeferenziazione diretta e indiretta e sulla base degli
articoli di Schuhmacher e Bohm (2005) e Alba, Giussani, Roncoroni e Scaioni (2005) vi sono i quattro metodi di seguito descritti.
4.1
Georeferenziazione diretta delle scansioni terrestri con ricevitore GPS integrato
Un metodo semplice e veloce per ottenere la posizione globale dei dati terrestri è quello di applicare un ricevitore GPS di basso
costo al sistema laser. Il ricevitore è fissato sull’asse di rotazione del sensore e durante il processo di scansione registra la posizione
GPS nel sistema globale WGS84 e la fornisce in tempo reale: l’accuratezza di posizionamento è tuttavia molto bassa e si ottengono
delle precisioni che variano attorno ai 2 m. Si può ottenere un notevole miglioramento utilizzando invece un GPS geodetico ad alte
prestazioni e posizionandolo dopo la scansione mediante su un treppiede sul punto segnalizzato della scansione laser: i dati postprocessati permettono di ottenere un’accuratezza centimetrica. La rotazione della nuvola di punti si ottiene indirettamente
considerando la posizione globale di almeno 3 scansioni e la sua accuratezza dipende evidente evidentemente da quella del
posizionamento delle stesse.
4.2
Georeferenziazione diretta delle scansioni terrestri con strumentazione topografica integrata
Il sensore laser viene georeferenziato in modo analogo a quanto fatto normalmente con una stazione totale: l’asse primario viene
centrato su un punto a terra e viene rettificato mediante l’impiego di viti calanti e di una livella torica; infine il restante grado di
libertà, costituito dalla rotazione nel piano orizzontale, viene vincolato mediante l’individuazione di una direzione nota, ad esempio
utilizzando un cannocchiale topografico installato sopra il sensore, la cui direzione di collimazione è nota per costruzione. A questo
punto si segue la stessa procedura di inquadramento globale di una stazione topografica mediante intersezione all’indietro da vertici
trigonometrici.
Questo tipo di georeferenziazione può risultare molto conveniente da un punto di vista operativo in tutti quei casi in cui il
posizionamento dei target è complesso o costoso, oppure in applicazioni di tipo speditivo nelle quali la precisione dei punti acquisiti
non è l’elemento prioritario. Lo svantaggio di questa modalità operativa, considerando la strumentazione attuale, è costituito dalla
minore precisione ottenibile nelle coordinate delle nuvole di punti acquisite.
4.3
Georeferenziazione indiretta delle scansioni terrestri mediante altri database
A differenza dei metodi diretti, la procedura di georeferenziazione indiretta mediante altri database considera la disponibilità di
dataset già georeferenziati nel sistema globale: non è così necessari né posizionare dei target né utilizzare altri strumenti topografici.
La procedura si basa sul metodo ICP (Iterative Closet Point, Besl e McKay, 1992): i dati terrestri vengono comparati con quelli già
georeferenziati tramite un processo di matching che considera una funzione iterativa di minima distanza, a partire da una prima
georeferenziazione approssimata scelta dall’operatore che deve quindi opportunamente roto-traslare la nuvola di dati terrestri fino a
portarli in prossimità dei corrispondenti oggetti del database. Una volta ottenuta la soluzione migliore, la soluzione iterativa si
assesta e la nuvola di punti terrestri risulta così georeferenziata.
Il database può essere costituito sia da modelli 3D di una cartografia numerica sia da dati laser aerei. Nel primo caso, per la
procedura di matching, ci si appoggia alle facciate degli edifici, in quanto il laser terrestre rileva proprio questa parte di essi nel
secondo caso invece, ci si appoggia ai punti ricavabili dal terreno e dai tetti.
4.4
Georeferenziazione indiretta delle scansioni terrestri mediante rete topografica
Questa procedura, definita “convenzionale” da Schuhmacher e Bohm (2005) in quanto la più comunemente utilizzata, prevede che la
registrazione e la georeferenziazione delle scansioni vengano svolte in un’unica procedura ed è basata sull’impiego di un numero
sufficiente di target per il calcolo dei parametri della trasformazione.
Figura 7: A sinistra, i target y e i vertici della rete topografica: V stazioni EDM, V stazioni EDM+GPS; a destra, l’integrazione fra
le scansioni: in rosso i dati terrestri, in toni di grigio quelli aerei.
Si può dire allora che la differenza sostanziale fra la registrazione (locale) e la georeferenziazione (globale) è che nella prima i target
hanno le coordinate della scansione baricentrica o di una rete topografica locale, mentre nella seconda hanno direttamente le
coordinate cartografiche globali. In maggior dettaglio, per la registrazione si necessita di almeno tre punti comuni fra le scansioni,
anche non rilevati topograficamente, mentre per la georeferenziazione sono sufficienti tre punti noti per tutte le scansioni.
Operativamente, poiché il rilevamento dei target avviene tramite stazione totale si preferisce riferirsi prima ad un sistema locale e
poi si georeferenzia il tutto tramite l’inquadramento in coordinate globali dei punti di stazione. Quest’ultimo problema si risolve
agevolmente oggigiorno posizionando un ricevitore GPS geodetico sui vertici della stessa.
Il principale vantaggio di questo metodo è sicuramente la libertà nel posizionamento dello strumento laser che non è inoltre
necessario rettificare. Inoltre l’utilizzo di stazioni totali comporta un’elevata accuratezza del rilievo dei target, grazie al quale sarà
poi possibile ottenere un modello 3D di punti affidabile e preciso. L’utilizzo di un secondo strumento comporta lo svantaggio che le
procedure di rilevamento laser vengono rallentate dalle misure topografiche per la determinazione dei target.
Per i dati terrestri del presente lavoro si è seguito questo ultimo approccio (vedi Figura 7 a sinistra), realizzando una rete topografica
di 10 vertici con le stazioni totali Leica TCRA 1103 e Topcon GTS 303 e misurando le coordinate di quattro di questi (C1, C2, C6 e
C7) con un ricevitore GPS Leica System 520 in modalità statica differenziale.
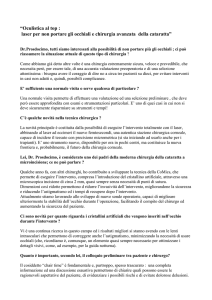
La Figura 7 a destra e la Figura 8 rappresentano l’integrazione così effettuata tra le scansioni aeree e quelle terrestri: è
qualitativamente visibile l’ottimo livello di congruenza ottenuto, dimostrato numericamente dallo scarto quadratico medio
centimetrico ottenuto con RiSCAN PRO nella georefenziazione della maggior parte delle scansioni.
5. MODELLAZIONE 3D
Disponendo ora di punti riferiti tutti nel sistema Gauss-Boaga, i dati terrestri sono stati importati in ambiente TerraScan e viceversa
quelli aerei in ambiente RiSCAN Pro, in modo da poter gestire al meglio la nuvola complessiva per ottenere automaticamente le
rappresentazioni di interesse (superfici, sezioni, profili e ortofoto) utilizzando, opportunisticamente fra i due software, quello con la
procedura informatica più efficiente allo scopo. Si sono così prodotti automaticamente decine di elaborati grafico-numerici di
diversa forma (nuvole di punti colorate, sezioni/profili vector, superfici/modelli poliedrici, ortofoto texturizzate raster) di eccellente
contenuto informativo. In Figura 8 sono rappresentate due sezioni che evidenziano la continuità del modello complessivo del
Castello tra scansione aerea e scansioni terrestri esterne e scansioni terrestri interne. Tutti gli elaborati grafico-numerici possono
essere inoltre automaticamente visualizzati anche in forma 3D mediante assonometrie/prospettive di notevole effetto descrittivo. Il
modello 3D ricostruito da dati laser-fotogrammetrici consente inoltre di disporre di informazioni di diverso contenuto e di crescente
livello di dettaglio che sono variamente sfruttabili a seconda dei software applicativi scelti per i diversi scopi di rappresentazione.
Figura 8: A sinistra, sezione in corrispondenza della Corte dei Lanzi; a destra, sezione in corrispondenza della Sala degli Stati
Provinciali.
Infine si è proceduto a vestire l’intero modello 3D aereo/terrestre del colle del castello con le immagini digitali: il DTM ed il tetto
dei modelli dei corpi di fabbrica con l’ortofoto aerea e le facciate degli stessi con le texture terrestri. Il formato del prodotto finale
(vector/raster) ha consentito di esportare ed importare il modello completo in ambienti software di realtà virtuale e di modellazione
solida quali 3D Studio® (Autodesk), ArcScene® (ESRI), VrmlPad®, Internet Space Builder® e Internet Space Assembler®
(ParallelGraphics). La modellazione di questo ambiente urbano è così fruibile in ambienti software di realtà virtuale: si possono
eseguire delle avvincenti navigazioni all’esterno e all’interno del Castello di Gorizia sia di tipo interattivo, in ambiente VRML, sia
lungo delle traiettorie predefinite creando quindi dei filmati AVI multimediali. Nelle diverse navigazioni tridimensionali si possono
visualizzare alcuni elaborati grafici rispetto che altri e con diverse opzioni di rappresentazione, a seconda del particolare interesse: in
questo modo l’utente può sfruttare al meglio e in modo dinamico l’enorme contenuto informativo così acquisito ed integrato.
6. CONCLUSIONI
Come è noto le tecniche di rilevamento ben si differenziano a seconda delle applicazioni: per la misurazione del territorio è
necessaria una visione globale dello stesso e quindi si ricorre a tecniche aeree, mentre per il rilevamento di un singolo oggetto, un
edificio piuttosto che una statua, è preferibile adottare una tecnica terrestre più ravvicinata. Dopo averle analizzate entrambe in
dettaglio è parso naturale superare questa differenziazione per trovare una loro integrazione, sicuramente possibile ed
auspicabilmente ottimale.
Dal punto di vista analitico, il requisito fondamentale dell’integrazione è l’opportuna georeferenziazione delle scansioni terrestri
ottenuta mediante target riflettenti rilevati con stazioni totali da una rete topografica con vertici misurati anche con ricevitori GPS.
Una volta ottenuta quindi la nuvola complessiva di oltre 36 milioni di punti laser, si dispone di un modello tridimensionale completo
e ad elevatissimo dettaglio del Castello di Gorizia, da cui sono state create diverse tipologie di prodotti di restituzione che vanno
dalle nuvole di punti, alle superfici, alle sezioni, alle texture, alle navigazioni tridimensionali.
Si conclude che il rilevamento laser si presta ottimamente per oggetti di elevata complessità e inseriti in ambiti urbani: il rilevamento
per via tradizionale di un edificio delle dimensioni e della complessità del Castello di Gorizia avrebbe comportato un’elevatissima
spesa per il tempo necessario e gli operatori impiegati, con una produttività sicuramente inferiore poiché con nessuna tecnica
sarebbe stato possibile acquisire un tale numero di punti. Di contro, i sistemi laser hanno attualmente ancora un costo elevato per le
piccole strutture e richiedono una certa preparazione ed esperienza nell’elaborazione dei dati. Si ritiene comunque che con lo
sviluppo tecnologico i costi si abbasseranno e i software dedicati avranno un sempre più elevato grado di automazione: per tali
ragioni si può asserire che le tecniche laser-fotogrammetriche integrate rappresentano il prossimo futuro del rilevamento topografico.
BIBLIOGRAFIA
Bibliografia da libri
Crosilla, F., Dequal, S., (a cura di), 2006. Il laser scanning terrestre. Collana di Geodesia e Cartografia. International Centre for
Mechanical Sciences (CISM), Udine.
Crosilla, F., Galetto, R., (a cura di), 2003. La tecnica del laser scanning: teoria e applicazioni. Collana di Geodesia e Cartografia.
International Centre for Mechanical Sciences (CISM), Udine.
Bibliografia da convegni
Alba, M., Giussani, A., Roncoroni, F., Scaioni, M., 2005. Analisi delle precisioni ottenibili nella determinazione di punti con laser
scanning terrestre utilizzando la georeferenziazione diretta. In: Atti del Convegno Nazionale della SIFET, Palermo, su CD.
Coren, F., Visintini, D., Balzani, M., Sterzai, P., Prearo, G., Zaltron, N., 2005. Un modello geometrico per la calibrazione di dati
laser terrestri. In: Atti del Convegno Nazionale della SIFET, Palermo, su CD.
Crosilla, F., Visintini, D., Prearo, G., Fico, B., 2005. Esperienze di filtraggio, classificazione, segmentazione e modellazione di dati
spaziali da rilievo laser aereo. Bollettino della SIFET, 1, pp. 13-51.
Schuhmacher, S., Böhm, J., 2005. Georeferencing of terrestrial laserscanner data for applications in architectural modelling. In:
The International Archives of Photogrammetry, Remote Sensing and Spatial Information Science, Mestre-Venezia, Italy, Vol.
XXXVI, Part 5/W17, articolo 15.
Visintini, D., Fico, B., 2005. Il rilevamento aereo delle volumetrie edilizie: laser vs fotogrammetria. In: Atti della IX Conferenza
Nazionale ASITA, Catania, Vol. 2, 2023-2028.
Visintini, D., Fico, B., Crosilla, F., Guerra, F., 2005. A 3D virtual model of the Gorizia downtown (Italy) by matching aerial and
terrestrial surveying techniques. In: The International Archives of Photogrammetry, Remote Sensing and Spatial Information
Sciences, Proceedings of the XXth International Symposium of CIPA, Torino, Italy, Vol. XXXVI, Part 5/C34, 1, pp. 575-580.
Dequal, S., Lingua, A., 2002. True orthophoto for architectural surveys. In: The International Archives of Photogrammetry,
Remote Sensing and Spatial Information Sciences, Proceedings of the XVIIIth International Symposium of CIPA, Potsdam,
Germany, Vol. XXXIV, Part 5/C7, pp. 269-276.
Axelsson, P., 2000. DEM generation from laser scanner data using adaptive TIN models. In: The International Archives of
Photogrammetry and Remote Sensing, Vol. XXXIII, B4/1, Amsterdam, pp. 110-117.
Besl, P.J., McKay, N.D.M., 1992. A method for registration of 3D shapes. IEEE Transactions on Pattern Analysis and Machine
Intelligence, 14(2), pp. 239-256.
RINGRAZIAMENTI
Il presente lavoro di ricerca si è svolto nell’ambito delle attività previste dal progetto EU INTERREG IIIA Phare/CBC ItaliaSlovenia “Ricomposizione della cartografia catastale e integrazione della cartografia tecnica regionale numerica per i sistemi
informativi territoriali degli enti locali mediante sperimentazione di nuove tecnologie di rilevamento” svolto dall’Università di
Udine (http://geomatica.uniud.it) in collaborazione con il Geodetski Inštitut Slovenije di Lubiana.