Approfondimenti su: cinematica, moto in una dimensione
Problemi 1,2,3,4: difficoltà media, utili per la preparazione all’esame
Problemi 5,6: argomenti di approfondimento, facoltativi
1) Un ghepardo, in agguato nella savana, avvista una gazzella e parte all’attacco. La sua
posizione media viene osservata variare nel tempo secondo la legge x(t) = x0 + b t2 , durante i
primi secondi del suo movimento.
a) Che cosa rappresentano i parametri x0 e b, e quali sono le loro dimensioni e unità di misura?
b) Ponendo i valori numerici di x0 e b rispettivamente a 20.0 e 4.2 (nelle rispettive unità di
misura), calcolare la velocità media del ghepardo nell’intervallo temporale da 1.2 s a 3.6 s.
c) Trovare la velocità istantanea al tempo t = 1.6 s, partendo dalla formula della velocità media
e considerando intervalli temporali via via più piccoli: ∆t =0.1 s, 0.01 s, 0.001 s.
d) Trovare l’espressione della velocità istantanea, calcolarla a t = 1.6 s e commentare.
2) Nel tubo a raggi catodici di un televisore, un elettrone entra in una regione in cui è accelerato
uniformemente per mezzo di forti campi elettrici, passando da una velocità iniziale di 3.2 ·104
m/s ad una velocità finale di 5.6 ·106 m/s in una lunghezza di 1.2 cm. Per quanto tempo
l’elettrone permane nella regione di accelerazione e qual è il valore dell’accelerazione?
(Questo è da farsi dopo aver studiato il moto armonico semplice)
3) Un corpo appeso ad una molla oscilla in verticale con un moto armonico semplice di
ampiezza A = 0.3 m, pulsazione ω = 3π rad/s e costante di fase ϕ = π/2 rad. Si calcolino
spostamento, velocità e accelerazione istantanee ai tempi seguenti: (a) t = 0 s; (b) t = 0.5 s; (c)
t = 1.0 s; (d) t = 2.7 s.
4) All’uscita di una curva, il macchinista di un treno che sta viaggiando a 120 Km/h si accorge
che una locomotiva da manovra è entrata nello stesso binario da una diramazione posta 0.47 Km
più avanti. La locomotiva procede a 19.0 Km/h, nella stessa direzione del treno. Il macchinista
aziona immediatamente la frenatura rapida. Quale deve essere il valore minimo della
decelerazione costante impressa dal freno per evitare una collisione ?
5) Un razzo sperimentale viene lanciato verticalmente; il motore è progettato per fornire
un’accelerazione a0 = 22.3 m/s2 verso l’alto, in modo da vincere l’accelerazione di gravità, ma
per un malfunzionamento la spinta del motore diminuisce linearmente col tempo (cioè secondo
una legge del tipo a(t) = a0 – k t, con k costante), arrestandosi del tutto dopo 14 s.
a) Qual è l’altezza massima raggiunta dal razzo?
b) Dopo quanto tempo il razzo ricade (rovinosamente) a terra?
(si consideri l’accelerazione di gravità g = 9.81 m/s2 praticamente costante a qualunque quota)
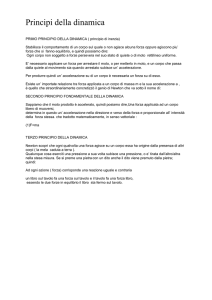
6) Un oggetto, partendo dalla posizione iniziale x0 al
tempo ti = 0 s, si muove su una retta secondo la legge
oraria x(t) rappresentata nel grafico. Costruire
qualitativamente i grafici della velocità istantanea v(t) e
dell’accelerazione istantanea a(t) (prestare attenzione ai
punti t1 e t5 ).
x
x0
0
t1
t2
t3 t4 t5
t6
t
Soluzioni dei problemi di approfondimento di:
cinematica, moto in una dimensione
1) Consideriamo x(t) = x0 + b t2 ; ovviamente x ha le dimensioni di una lunghezza, quindi:
a) x0 ha le dimensioni di una lunghezza e si misura in metri (m).
Derivando una volta rispetto al tempo si passa da x(t) alla velocità
x
v(t) = 2bt; derivando una seconda volta si trova l’accelerazione a(t) =
2b, per cui il parametro b è ½ dell’accelerazione del ghepardo. Le sue
x0
dimensioni sono quindi quelle di un’accelerazione, e l’unità di misura
2
2
t
sarà m/s , in modo che moltiplicando per il tempo al quadrato t si
2
2
2
ottengano i metri: ([b] · [t ] = m/s · s = m). Il moto del ghepardo è
uniformemente accelerato (almeno nei primi istanti) se b è costante.
b) Poniamo x0 = 20.0 m e b = 4.2 m/s2 e chiamiamo ti = 1.2 s (tempo iniziale), tf = 3.6 s (tempo
finale). La velocità media nell’intervallo temporale dato sarà:
∆ x x f − xi x (t f ) − x (ti ) x0 + b t f − ( x0 + b ti )
v =
=
=
=
=
t f − ti
t f − ti
∆ t t f − ti
2
b (t f − ti )
2
=
2
t f − ti
=
2
4.2 m/s2 (3.62 − 1.22 ) s2
= 20.16 m/s
(3.6 − 1.2) s
(≅ 72.6 km/h)
c) Calcoliamo i diversi valori di velocità che si ottengono dalla formula precedente
considerando il tempo iniziale ti = 1.6 s, e come tempo finale tf = ti + ∆t .
Per ∆t = 0.1 :
v1 =
x ( t f ) − x ( ti )
t f − ti
b [(ti + ∆t ) 2 − ti ] b [( 2 ti ∆t + ∆t 2 ]
=
=
∆t
∆t
2
=
4.2 m/s 2 [2 ⋅ 1.6 ⋅ 0.1 + 0.12 ] s 2
= 13.86 m/s
0.1 s
Allo stesso modo per ∆t = 0.01 risulta v2 = 13.48 m/s, e per ∆t = 0.001 si ha v3 = 13.44 m/s.
d) Dalla derivata prima v(t) = 2 b t, già trovata in a), calcoliamo la velocità istantanea:
v (t = 1.6 s ) = 2 ⋅ 4.2 m/s 2 ⋅ 1.6 s = 13.44 m/s
Si osserva quindi come la successione delle velocità v1 , v2 e v3 , calcolate al punto c) con
degli intervalli temporali sempre più piccoli tende rapidamente all’esatto valore della
velocità istantanea.
(Una curiosità: quale sarà la velocità del ghepardo al tempo tf ?)
=
2) Si considerano le leggi del moto rettilineo uniformemente accelerato:
x ( t ) = x 0 + v 0 t + 12 a t 2
v (t ) = v 0 + a t
dove si prenderanno posizione e velocità iniziali x0 = 0 m e v0 = 3.2 ·104 m/s , mentre posizione e
velocità finali al tempo t saranno x(t) = 1.2 cm = 0.012 m e v(t) = 5.6 ·106 m/s. Si ha un sistema
di due equazioni nelle due incognite a e t.
Ricaviamo l’accelerazione a dalla seconda equazione:
a =
v (t ) − v 0
t
e sostituiamo nella prima:
x (t ) = v 0 t +
1
2
v( t ) − v 0
t
t2 =
1
2
(v 0
+ v (t ) ) t
Da questa ricaviamo il tempo t, corrispondente all’intervallo di tempo (a partire dallo zero)
durante il quale l’elettrone è accelerato:
2 x (t )
2 ⋅ 0.012 m
= 4.26 ·10 -9 s (4.26 ns) ;
t=
=
(v 0 + v(t ) ) (3.2 ·10 4 + 5.6 ·106 ) m/s
infine ricaviamo l’accelerazione da una delle formule precedenti:
( 5 . 6 ·10 6 − 3 . 2 ·10 4 ) m/s
a =
= 1 . 31 ·10 15 m/s 2 .
−9
4 . 26 ·10 s
Notiamo che l’accelerazione trovata è di ben 14 ordini di grandezza superiore all’accelerazione
di gravità (9.8 m/s2) !
3) La coordinata posizione di un corpo in moto
oscillatorio armonico semplice è descritta da una
legge del tipo:
x (t ) = A cos(ω t + ϕ )
cos(θ)
1,5
1
0,5
se la posizione centrale di equilibrio è assunta essere
in x = 0 m. La velocità e l’accelerazione istantanee si
ricavano direttamente per derivazione rispetto al
tempo:
v (t ) = − A ω sen(ω t + ϕ )
a (t ) = − A ω 2 cos(ω t + ϕ )
0
-0,5
•
•
π/2
•π
•
3π/2
•
2π
•
•
3π
•
θ
-1
-1,5
Tutte queste tre grandezze sono proporzionali a delle 1,5
sen(θ)
1
funzioni trigonometriche (senθ o cosθ), che
dipendono dall’angolo θ(t) = (ω t + ϕ), e assumono 0,5
valori compresi tra +1 e –1. Nelle due figure
0 •
• 2π
• π• 3π/2
• • 3π• •
π/2
θ
costruiamo la rappresentazione grafica di queste -0,5
funzioni, con l’angolo espresso in radianti.
-1
Nel problema che stiamo studiando, x(t) è la -1,5
coordinata verticale, l’ampiezza del moto (altezza
massima o minima del corpo) è A = 0.3 m, la
pulsazione è ω = 3π rad/s, e la costante di fase vale
ϕ = π/2 rad. Non resta che calcolare l’angolo θ(t) per ognuno dei tempi assegnati, trovare quindi
il valore della funzione trigonometrica (anche solo osservando il grafico) e infine ricavare x(t),
v(t) e a(t) dalle loro espressioni.
I primi tre casi sono “speciali”, il calcolo è immediato e conviene fare una tabella:
θ(t) = ω t + ϕ
cos(θ)
sen(θ)
x(t)= A cos(θ)
v(t)= -Aω sen(θ)
a(t)= -Aω2 cos(θ)
(a) t = 0 s
π/2 rad
0
+1
0m
-2.83 m/s
0 m/s2
(b) t = 0.5 s
(90 ) 2π rad
(3600)
+1
0
0.3 m
0 m/s
-26.6 m/s2
0
(c) t = 1.0 s
7π/2 rad
0
-1
0m
+2.83 m/s
0 m/s2
Per il quarto caso (d) è necessario calcolare esplicitamente. Mostriamo solo il calcolo per
l’accelerazione, cominciando dalla funzione trigonometrica; in questo tipo di calcoli conviene
tenere conto delle unità di π :
cos(ω t + ϕ ) = cos( 3π rad/s ⋅ 2.7 s + π /2 rad) = cos(8.6π rad) =
= cos( 0.6 π rad) = cos(1.88 rad) = - 0.30
in cui si è passato da 8.6π rad a 0.6π rad togliendo 4π rad (4 angoli giri), e può essere
eventualmente utile (dipende dal tipo di calcolatrice) trasformare l’angolo da radianti a gradi :
360 0
360 0
θ 0 = θ ( rad ) ⋅
= 1 . 88 ⋅
= 107 . 7 0
2π
2π
Infine abbiamo:
a = − Aω 2 cos(ω t + ϕ ) = −0.3m ⋅ (3π rad/s) 2 ⋅ (-0.30) = 0.3m ⋅ 88.8s -2 ⋅ 0.30 = + 7.99m/s 2
Nota: i radianti non sono un’unità di misura (al pari di metri e secondi) ma sono un numero
puro: infatti indicano solo quante volte è lungo, rispetto al raggio, un arco di circonferenza
connesso all’angolo in esame; di conseguenza possono scomparire senza problemi dal calcolo
delle unità di misura, tranne ovviamente nelle funzioni trigonometriche. Un altro modo di
esprimere lo stesso concetto è il seguente: un angolo non ha “dimensioni” come le altre
grandezze fisiche, poiché le sue caratteristiche sono indipendenti dal modo in cui può essere
misurato (ad esempio, un angolo retto è sempre “retto”, un segmento può essere “lungo” o
“corto” rispetto a un segmento di riferimento), e quindi non ha neanche “unità di misura”.
4) Poniamo lo zero dell’asse X nel punto in cui il treno esce dalla curva; da questo momento il
treno procede con moto rettilineo uniformemente decelerato (con accelerazione negativa –aT), e
con velocità iniziale vT = 120 Km/h = 33.3 m/s; lo spazio percorso è dato dalla formula:
xT (t ) = v T t −
1
2
aT t 2
e la sua rappresentazione grafica sul piano t-x è data da una curva parabolica con pendenza
iniziale vT , che poi diminuisce fino a zero (tangente orizzontale), quando il treno si arresta.
La locomotiva viaggia a velocità costante
3
vL = 19.0 Km/h = 5.28 m/s, partendo dalla
x
Locomotiva
posizione iniziale xL = 0.47 Km = 470 m, e
(pendenza vL)
il suo spostamento è dato dalla formula:
xL (t ) = x0 + v L t
2
x0
1
La rappresentazione grafica è una retta che
Treno
parte da x0 , e ha pendenza vL < vT .
(pendenza vT)
Conviene fare dapprima uno studio grafico
qualitativo della situazione. Nella figura
0·
t
sono rappresentati tre diversi casi possibili,
quando sono assegnati tre diversi valori per l’accelerazione del treno aT , con in particolare a1 >
a2 > a3 . Nel caso 1 (curva verde) si ha una forte decelerazione e il treno si arresta prima di
incontrare la locomotiva (rappresentata dalla retta nera). Nel caso 3 (curva rossa) la
decelerazione è troppo bassa e il treno raggiunge la locomotiva con velocità nettamente superiore
(osservare le pendenze) e quindi si ha collisione; notare che la curva incontrerebbe la retta in due
punti. Nel caso intermedio 2 (curva blu) la decelerazione è tale da far incontrare le due curve in
un unico punto, in cui esse hanno la stessa tangente (la stessa velocità); i due veicoli s’incontrano
senza danni. La decelerazione minima da trovare è quindi la a2 . (Per esercizio, costruire un
grafico il più’ possibile esatto, calcolando numericamente le formule viste e usando diverse a).
Per la soluzione del problema, è chiaro che l’incontro tra i veicoli avviene quando a un certo
tempo t si ha xT(t) = xL(t), cioè se:
vT t −
⇒
aT t 2 = x0 + v L t
1
2
1
2
aT t 2 + (v L − v T ) t + x0 = 0
Questa è una equazione di secondo grado nell’incognita t; per quanto visto dallo studio grafico,
per evitare la collisione non vi devono essere soluzioni reali per t, o al limite ve ne può essere
una sola; questo equivale a richiedere che il discriminante sia minore o uguale a zero:
∆ = ( v L − v T ) 2 − 2 aT x0
≤
0
da cui si ricava facilmente la decelerazione del treno:
( v − v T ) 2 (5.28 − 33.3) 2 ( m/s) 2
aT ≥ L
=
= 0.84 m/s 2
2 x0
2 ⋅ 470 m
e quindi la minima accelerazione negativa che il treno deve avere per evitare la collisione risulta
essere 0.84 m/s2 . Per esercizio, ricavare anche il tempo al quale i veicoli s’incontrano
dolcemente, e la loro velocità in quel momento (serve anche come verifica).
5) Il moto del razzo risulta composto di due diverse parti. Nella prima parte (I) il razzo sale con
un moto accelerato, ma non uniforme, in cui è sottoposto all’accelerazione totale, variabile
nel tempo secondo:
aT (t ) = a (t ) − g = a 0 − k t − g
dove g è l’accelerazione di gravità (non dimentichiamo che la gravità è
sempre presente!) e a(t) è l’accelerazione fornita dal motore; questa prima
y2
parte del moto dura fino allo spegnimento del motore al tempo t1 = 14 s,
dove il razzo è arrivato alla quota y1 e ha la velocità v1.
Nella seconda parte del moto (II) si ha semplicemente una caduta libera del
y1
razzo, sottoposto alla gravità; il razzo, grazie alla velocità acquisita v1
II
(supposta positiva!) sale ancora fino alla quota y2, ma poi precipita fino al
I
suolo (y = 0) al tempo finale tf.
Il primo passo è trovare la costante k che descrive l’evoluzione nel tempo
dell’accelerazione del motore; dalla formula lineare a(t) = a0 – k t, e dal
fatto che al tempo t1 deve essere a(t) = 0 m/s2 , si ha:
a
22.3 m/s 2
a 0 = k t1
k= 0 =
= 1.59 m/s 3
t1
14 s
(Le “dimensioni” di k sembrano strane ma sono coerenti con il suo ruolo nella formula di a(t)).
(I) Possiamo ora calcolare velocità e altezza del razzo alla fine del primo periodo. Poiché siamo
in presenza di accelerazione non costante, ricorriamo alle formule integrali; la velocità al tempo
t si trova integrando l’accelerazione totale nel tempo da 0 a t, con velocità iniziale zero, perché il
razzo parte da fermo dalla sua rampa di lancio:
⇒
t
t
v ( t ) = ∫ aT (t ) dt = ∫ ( a 0 − g − k t ) dt =
0
0
t
= ( a 0 − g ) ∫ dt − k
0
t
∫0 t
dt = ( a 0 − g )t − 12 k t 2
mentre l’altezza al tempo t si trova integrando la v(t) con altezza iniziale zero:
t
t
[
]
y ( t ) = ∫ v ( t ) dt = ∫ ( a 0 − g ) t − 12 k t 2 ) dt =
0
0
t
= ( a 0 − g ) ∫ t dt − 12 k
0
t
∫0 t
2
dt = ( a 0 − g ) 12 t 2 − 12 k ⋅ 13 t 3 = 12 ( a 0 − g )t 2 − 16 k t 3
(Nota: come ci si doveva aspettare, essendo l’accelerazione lineare nel tempo, la posizione
dipende dal tempo al cubo).
Imponendo il tempo t1 (e ricordando che g = 9.8 m/s2) otteniamo le quantità:
v 1 = + 19 . 2 m/s ;
y 1 = + 498 m
(II) Passiamo ora alla seconda parte del moto; essendo uniformemente accelerato (con
accelerazione costante –g) possiamo usare le formule note, che valgono con la scelta del tempo
iniziale a zero: dovremo ricordarci di sommare il tempo di volo che calcoliamo per questa II
parte al tempo t1 della parte I del movimento per avere il tempo totale tf del volo; posizione e
velocità iniziali sono quelle appena calcolate:
y (t ) = y1 + v 1 t −
v (t ) = v 1 − g t
1
2
g t2
L’altezza massima y2 verrà raggiunta al tempo t in cui la velocità verticale risulta zero; quindi
dalla seconda formula con v(t) = 0 m/s abbiamo:
v
19.2m/s
0 = v 1 − gt
t= 1 =
= 1.96 s
g 9.8m/s 2
e sostituendo nella prima:
⇒
y 2 = y1 + v 1 t −
1
2
g t 2 = 498 m + 19.2m/s ⋅ 1.96s - 12 ⋅ 9 . 8 m/s 2 ⋅ (1 . 96 s) 2 = 517 m
Il tempo di volo della seconda parte del moto tII si troverà direttamente dalla prima formula,
imponendo y(t) = 0 (altezza al suolo):
0 = y1 + v1 t II − 12 g tII
2
⇒
1
2
g t II − v1 tII − y1 = 0
2
che è una equazione di secondo grado nell’incognita tf ; risolvendo si troveranno due soluzioni:
+ v 1 ± v 1 + 2 ⋅ g ⋅ y1 19.2 ± 19.2 2 + 2 ⋅ 9.8 ⋅ 498
t II =
=
=
9.8
g
2
tII = +12.2
s
tII = -8.31 s
da cui, sommando al tempo di volo t1 della prima parte abbiamo due risultati per il tempo totale:
t f = 26.2s ;
t f = 5.69s
Quale di questi risultati è quello giusto? Sono tutti e due accettabili ?
La soluzione che c’interessa è ovviamente la prima poiché deve essere tf > t1 . L’altra soluzione è
un tempo precedente a t1 , e quindi non ha significato per il nostro problema. In realtà si può
vedere che il secondo risultato per tII corrisponde all’intervallo di tempo trascorso da quando un
corpo viene lanciato dal suolo verso l’alto, sottoposto solo a g, in modo che arrivi all’altezza y1
con velocità v1.
In conclusione, l’altezza massima raggiunta dal razzo è 517 m, e il tempo totale del volo, dal
lancio alla caduta, è 26.2 s.
Altri esercizi interessanti per completare il discorso:
a) verificare l’affermazione fatta sopra a proposito dell’altro valore di tII ;
b) cosa succede e cosa cambia nei risultati se a0 = 15 m/s2 ?
6) Da una attenta lettura del grafico, e dall’osservazione della pendenza delle curve (la retta
tangente) si ricava che il corpo è rimasto fermo fino a t1, si è messo poi bruscamente in
movimento con velocità positiva fino a t2 , dove v(t) = 0 m/s (tangente orizzontale). Poi il corpo
ha assunto una velocità negativa, con un minimo di pendenza negativa a t3, ritornando a velocità
zero a t4; successivamente la velocità è aumentata speditamente (intorno a t5 la pendenza è
praticamente verticale) per poi diminuire fino ad assestarsi a un valore costante verso t6 .
Matematicamente il punto a t1 è un punto angoloso e quindi non derivabile, o meglio dotato delle
due derivate, destra e sinistra, a seconda di come ci si avvicina a questo punto, il quale manifesta
quindi una discontinuità nella derivata prima. In Fisica, naturalmente, non è possibile che il
corpo si metta in movimento “istantaneamente”; si avrà invece un cambiamento di velocità
continuo (dalla derivata sinistra alla destra) in un intervallo temporale molto piccolo, non
percettibile su questo grafico, e quindi agli effetti pratici la velocità sarà comunque una funzione
continua del tempo (e lo stesso sarà per l’accelerazione). Nel punto t5 la pendenza è quasi
verticale: questo significa che si ha un ∆x sensibile diviso per un ∆t molto piccolo; la velocità è
molto grande, virtualmente infinita (ma per un intervallo di tempo infinitesimo!). Lo stesso
succede anche per l’accelerazione, che però cambia segno passando da sinistra a destra rispetto a
t5 , poiché da un lato la velocità è in aumento, dall’altro in diminuzione.
In conclusione, i grafici qualitativi della velocità e accelerazione istantanea saranno del tipo:
v
a
t3
0
t1
t2
t1
t4 t5
t6
t
0
t2
t5
t3 t4
t6
t