Capitolo 12
Moto oscillatorio
INTRODUZIONE
Quando la forza che agisce su un corpo è proporzionale al suo spostamento dalla posizione di equilibrio ne risulta un particolare tipo di moto. Se la forza agisce sempre verso la posizione di equilibrio, ne risulta un moto avanti e indietro attorno a questa posizione. Un tale moto è un
esempio di ciò che si chiama moto periodico o oscillatorio.
Alcuni moti periodici sono molto familiari, come ad esempio le oscillazioni di una massa
collegata a una molla, il moto di un pendolo e le vibrazioni di uno strumento musicale a
corda.
Gran parte di questo capitolo riguarderà il moto armonico semplice. In questo tipo di
moto, il corpo oscilla indefinitamente fra due punti dello spazio senza perdita di energia meccanica. Nei sistemi meccanici reali sono sempre presenti forze dissipative (attrito).
207
Capitolo 1 2
NOTE
12.1 Moto di una particella collegata a una molla
Molti sistemi fisici esibiscono un moto oscillatorio, come per esempio una massa fissata alla
estremità di una molla, un pendolo, gli atomi in un solido, strumenti musicali a corda e circuiti elettrici collegati a una sorgente di corrente alternata. Un corpo si muove di moto
armonico semplice se la forza esterna risultante agente su di esso è una forza di richiamo
lineare; l’accelerazione è proporzionale allo spostamento del corpo dalla sua posizione di
equilibrio ed è in verso opposto. Il moto armonico semplice di un sistema meccanico corrisponde alle oscillazioni di un corpo fra due posizioni per un tempo infinito, senza alcuna
perdita di energia meccanica.
12.2 Rappresentazione matematica di un moto armonico semplice
Il valore della costante di fase dipende dalla posizione e dalla velocità iniziale del corpo.
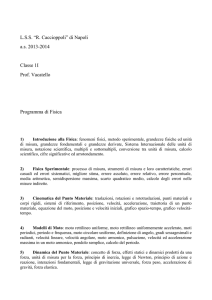
La Figura 12.1 mostra il grafico della posizione, della velocità e dell’accelerazione in funzione del tempo, assumendo le condizioni iniziali t = 0, xi = A e vi = 0. In questo caso, si ha
che = 0. Osserva che la velocità è sfasata di 90° rispetto alla posizione, ovvero v è zero
quando 冷x 冷 ha il suo valore massimo, mentre 冷v 冷 ha il suo massimo quando x è zero. Inoltre,
l’accelerazione è sfasata di 180° rispetto alla posizione, ovvero quando x è un massimo positivo, a è un massimo negativo. In altre parole a è proporzionale a x, ma ha verso opposto.
(a)
Figura 12.1.
Grafico (a) della posizione, (b) della velocità e (c) dell’accelerazione
in funzione del tempo per un corpo in moto armonico semplice.
(b)
(c)
208
Capitolo 1 2
È necessario definire alcuni termini relativi al moto armonico:
•
L’ampiezza, A, è la massima distanza di cui si sposta il corpo dalla sua posizione di equilibrio. In assenza d’attrito, un oggetto continuerà a muoversi di moto armonico semplice.
Durante ogni ciclo, esso raggiungerà una distanza massima uguale all’ampiezza su ciascun
lato della posizione di equilibrio.
•
Il periodo, T, è il tempo necessario al corpo per compiere un ciclo completo del moto.
•
La frequenza, f, è il numero di cicli o vibrazioni per secondo.
Il sistema blocco-molla mostrato in Figura 12.2 è un tipico sistema con moto armonico semplice. Il blocco si
muove su di una superficie orizzontale liscia e il punto
x = 0 ne individua la posizione di equilibrio, ovvero la
posizione in cui il blocco permane se lasciato indisturbato. In questa posizione non agisce alcuna forza sul blocco.
Quando il corpo è spostato ad una distanza x dalla posizione di equilibrio, la molla esibisce una forza di richiamo
lineare descritta dalla legge di Hooke, F = – kx, dove k è la
costante di forza della molla ed ha unità SI di N/m. Il
segno meno indica che la forza punta verso sinistra
quando lo spostamento x è positivo, mentre punta verso
destra quando x è negativo. In altre parole, la direzione
della forza F punta sempre verso la posizione di equilibrio.
Figura 12.2
Moto oscillatorio di un corpo
fissato ad una delle estremità
di una molla.
209
Capitolo 1 2
12.3 Cosiderazioni energetiche nel moto armonico semplice
Dovreste confrontare accuratamente il moto del sistema massa-molla e quello del pendolo
semplice. In particolare, notate che quando lo spostamento è massimo, l’energia del sistema
è totalmente energia potenziale; quando lo spostamento è nullo, l’energia è invece interamente energia cinetica. Ciò è coerente con il fatto che v = 0 quando 冷x 冷 = A, mentre v = vmax
quando x = 0. Per un valore arbitrario di x, l’energia è la somma di K e U.
12.4 Il pendolo semplice
Un pendolo semplice consiste di una massa m fissata ad una delle estremità di una corda
di massa trascurabile e lunghezza L, come è mostrato in Figura 12.3. Quando la posizione
angolare è piccola durante l’intero moto (inferiore a circa 15°), il pendolo si muove di
moto armonico semplice. In questo caso, la forza risultante agente sulla massa m è uguale
alla componente del peso tangente alla circonferenza ed ha modulo mg sen . Poiché questa forza è sempre diretta verso = 0, essa corrisponde a una forza di richiamo. Per piccoli valori di , con misurato in radianti, è possibile ricorrere all’approssimazione per piccoli angoli, sen ⬵ . In questa approssimazione, l’equazione del moto si riduce all’Equazione
12.12, d 2/dt 2 = –g/L.
Questa equazione è formalmente identica all’Equazione 12.2 per il moto
del sistema massa-molla, d 2x/dt 2 = –2x, che ammette come soluzione
x = A cos(t + ). La corrispondente soluzione dell’Equazione 12.12 è
= i cos(t + ), dove è data dall’Equazione 12.13. Il periodo del moto
è dato invece dalla Equazione 12.14. In altre parole, il periodo dipende
soltanto dalla lunghezza del pendolo e dalla accelerazione di gravità,
non dipende invece dalla massa. Pertanto, possiamo concludere che tutti
i pendoli semplici di uguale lunghezza oscillano con la stessa frequenza
e con lo stesso periodo.
210
Figura 12.3
Capitolo 1 2
12.5 Oscillazioni smorzate
Le oscillazioni smorzate sono osservate nei sistemi reali nei quali sono presenti forze dissipative come l’attrito. Queste forze riducono nel tempo l’ampiezza delle oscillazioni, poiché
il sistema perde continuamente energia meccanica. Quando si assume che le forze dissipative sono proporzionali alla velocità ma piccole rispetto alla forza di richiamo, il sistema
oscillerà con un’ampiezza che decresce esponenzialmente nel tempo.
È possibile compensare l’energia persa da un oscillatore smorzato aggiungendo una forza
che svolge lavoro positivo sul sistema. Questa energia addizionale fornita al sistema deve
essere almeno uguale all’energia perduta per attrito in modo da mantenere costante
l’ampiezza. L’energia trasferita al sistema è massima quando la forza eccitatrice è in fase
con la velocità del sistema. L’ampiezza è massima quando la frequenza della forza eccitatrice è uguale alla frequenza propria (di risonanza) del sistema.
EQUAZIONI E CONCETTI
La forza che una molla esercita su una massa
ad essa collegata e spostata di un tratto
x dalla sua posizione di riposo è data dalla
legge di Hooke. La costante elastica, k, è sempre positiva e ha un valore che corrisponde
alla rigidità relativa della molla. Il segno
meno significa che la forza esercitata sulla
massa è sempre diretta in verso opposto allo
spostamento – la forza è una forza di richiamo, sempre diretta verso la posizione di equilibrio.
Fs = –kx
Un oggetto si muove di moto armonico semplice quando la forza risultante lungo la direzione del moto è proporzionale allo spostamento e in verso opposto.
211
(12.1)
Capitolo 1 2
Applicando la seconda legge di Newton al
moto nella direzione x si ha F = max = –kx.
Poiché ax = d 2x/dt 2, ciò è equivalente all’Equazione 12.2.
(12.2)
La soluzione generale dell’Equazione 12.2
rappresenta la dipendenza temporale della
posizione x, purché sia 2 = k/m. In questa
espressione A rappresenta l’ampiezza del
moto, t + è la fase, è la pulsazione
(rad/s) e è la costante di fase.
(12.3)
Il periodo del moto, T, è uguale al tempo
necessario alla massa per completare una
oscillazione, cioè il tempo che la massa impiega per ritornare alla posizione iniziale con
velocità uguale a quella iniziale.
(12.4)
La frequenza del moto, f, è uguale all’inverso
del periodo e rappresenta il numero di oscillazioni nell’unità di tempo. T si misura in secondi, mentre f si misura in s–1 ossia in hertz (Hz).
(12.5)
La derivata prima di x rispetto al tempo dà la
velocità della massa in funzione del tempo.
(12.6)
(12.7)
212
Capitolo 1 2
L’accelerazione in funzione del tempo è
uguale alla derivata rispetto al tempo della
velocità (ossia alla derivata seconda dello
spostamento). Notate che l’accelerazione (e
quindi la forza) è sempre proporzionale allo
spostamento cambiato di segno.
(12.8)
(12.9)
L’energia cinetica di un oscillatore armonico
semplice è data da 12 mv2, mentre l’energia
potenziale è uguale a 12 kx2. Usando le
Equazioni 12.3 e 12.6, insieme con 2 = k/m, si
ottiene l’energia totale E dell’oscillatore.
Notate che E rimane costante, poiché abbiamo assunto che non vi sono forze non conservative agenti sul sistema. L’energia totale dell’oscillatore armonico semplice è una costante del moto ed è proporzionale al quadrato
dell’ampiezza.
(12.10)
(12.11)
La conservazione dell’energia si può usare
per ottenere un’espressione della velocità in
funzione della posizione.
La velocità di un corpo nel moto armonico
semplice è massima per x = 0; la velocità è
zero quando il corpo si trova nel punto di
massimo spostamento (x = ±A).
213
Capitolo 1 2
L’equazione del moto per il pendolo semplice
si basa sull’assunzione di piccoli spostamenti
angolari di modo che sen ⬵ .
(12.12)
Il periodo e la frequenza di un pendolo semplice dipendono soltanto dalla lunghezza del
filo di sospensione e dal valore dell’accelerazione di gravità.
(12.13)
(12.14)
SUGGERIMENTI, ESPEDIENTI E STRATEGIE
La maggior parte di questo capitolo riguarda il moto armonico semplice e le proprietà della
espressione della posizione
(12.3)
Per ottenere la velocità v(t) e l’accelerazione a(t) del sistema, si deve avere familiarità tanto con
l’operazione di derivazione quanto con le funzioni trigonometriche. In particolare, bisogna notare che
Usando questi risultati, e x(t) dall’Equazione 12.3, si ha:
(12.6)
(12.8)
e
214