focus
54
Una tecnica alternativa
per rilevare gli ostacoli
Un sistema di proiezione 3D, sviluppato da Fujitsu per migliorare la visione
panoramica, consente di scegliere tra vari punti di vista intorno al veicolo.
I
dispositivi di sicurezza dei veicoli sono
nettamente migliorati negli ultimi anni
e oggi tra gli optional figurano spesso
sistemi di assistenza al parcheggio
che utilizzano ultrasuoni o telecamere.
Di solito questi sistemi, dotati di
una o due telecamere, sono collegati
alla head unit e fungono da semplice
ausilio per il parcheggio. Il tratto di
retromarcia è proiettato sull’immagine
della telecamera e indica la direzione
di movimento. Altri sistemi dotati di
due telecamere nel paraurti anteriore
possono anche mostrare ostacoli
nascosti sul display centrale. Il livello di
espansione successivo prevede quattro
telecamere parallele che forniscono una
visuale “a volo d’uccello” dell’ambiente
che circonda il veicolo. Questi sistemi
sono semplicemente un “qualcosa in
più” rispetto al consueto sguardo dietro
le spalle e sono progettati per affrontare
solo una determinata situazione di
guida. Il sistema sviluppato da Fujitsu,
invece, consente di utilizzare le singole
funzioni in varie combinazioni e di
visualizzare, a seconda della situazione,
tutte le funzioni della telecamera in un
sistema integrato.
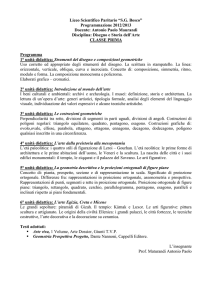
Visione “a volo d’uccello”
Nei sistemi a telecamera con visione
panoramica l’immagine generale viene
creata sulla base di quattro immagini
singole (Fig. 1). In genere le telecamere
sono installate nei paraurti anteriore
e posteriore e negli specchietti
laterali. Le informazioni provenienti
da queste immagini singole possono
SELEZIONE DI ELETTRONICA
Fig. 1 - Esempio dell’attuale implementazione dei sistemi a visione panoramica
essere visualizzate sotto forma di
visuale “a volo d’uccello”. Dato che
ogni telecamera ha un campo visivo
maggiore di 180°, le singole immagini
si sovrappongono e possono essere
fuse in un’unica immagine. L’immagine
composta può diventare tridimensionale
con trasformazione della proiezione
usando una matrice omografica o, in
alternativa, un’ulteriore elaborazione
della proiezione. Con entrambi i
metodi vengono usate superfici piane
per la proiezione. L’ambiente che
circonda l’auto può essere facilmente
visualizzato, ma le zone più lontane
appaiono distorte e sfocate. Questo
problema è dovuto al piano di proiezione
piatto selezionato. Gli oggetti più
lontani appaiono su una zona più grande
del sensore della telecamera e risultano
sfocati. Inoltre, non potendo modificare
il punto di vista, la visualizzazione
dell’ambiente che circonda il veicolo è
limitata a 2-3 metri. Anche usando la
visuale da sopra per fare retromarcia,
serve comunque l’immagine della
telecamera posteriore corretta. Questo
va visualizzato contemporaneamente
con la visuale “a volo d’uccello”. Con
tante immagini singole sul display
è molto difficile capire quale sia la
situazione reale. Per questo gli attuali
sistemi offrono un aiuto limitato.
Proiezione ambientale 3D
Fujitsu ha creato una nuova tecnica
che va ad aggiungersi alle tecnologie di
proiezione esistenti. Con la proiezione
3D dell’ambiente le singole immagini
vengono proiettate su un oggetto curvo
tridimensionale. Il numero e la posizione
delle telecamere rispecchiano l’attuale
[ car-infotainment ]
sistema con visuale “a volo
d’uccello”. Questo metodo
consente di selezionare
una vista panoramica
da vari punti di vista e di
modificare gradualmente il
campo visivo. Questo tipo
di visualizzazione, per la
quale occorrono diverse
fasi, è basata sul calcolo
dell’oggetto curvo per la
proiezione che è costituito
da un modello a griglia
formato da tanti poligoni.
Successivamente con
la griglia si calcolano le
coordinate della texture e
si applicano le texture delle
immagini. A questo punto è
possibile generare in tempo
reale singoli punti di vista
in modo semplice e flessibile mediante
ricalcolo. Con questo metodo anche
gli oggetti che si trovano a una certa
distanza dal veicolo risultano visibili,
con conseguente eliminazione dei
punti ciechi. Lo sviluppo può essere
suddiviso in diverse fasi. Prima si
misurano i parametri dell’obiettivo e
si determinano le posizioni relative
delle immagini delle telecamere.
Quindi, con un software, si generano
l’oggetto in proiezione 3D e il modello
a poligoni. La fase di sviluppo finale
consiste nel determinare la proiezione
dell’immagine sulla griglia calcolata.
Il codice di programma viene caricato
nel sistema target che riproduce
continuamente l’immagine insieme al
modello dell’auto. La sfida più grande
è stata trovare la forma ideale di
proiezione e trasferirla nel sistema in
tempo reale del veicolo.
Più sicurezza
Il punto di vista flessibile consente
al conducente di vedere l’ambiente
che circonda l’auto da prospettive
diverse. Può scegliere la visuale “a
volo d’uccello” o una visuale da un
punto qualsiasi del veicolo. Nella prima
versione, il punto di vista può essere
spostato su coordinate predefinite
del modello a griglia 3D. Il passaggio
da una punto di vista all’altro è
interpolato. Durante questo processo
tutta l’immagine viene ricalcolata
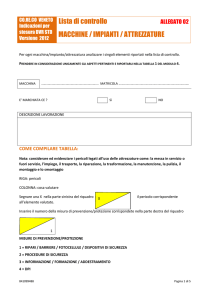
Fig. 2 - Il diagramma
a blocchi del processore
applicativo MB86R11
continuamente, dando un’impressione
di movimento. Questa transizione in
tempo reale favorisce l’orientamento.
Usando anche il modello dell’auto
è più facile valutare prospettive e
proporzioni. Oltre al calcolo del modello
a griglia, alla compensazione della
distorsione dell’obiettivo e alla relativa
combinazione continua delle immagini,
una delle più grandi sfide del progetto
consisteva nel ridurre al minimo i tempi
di latenza. Questo è l’unico modo per
individuare immediatamente zone
pericolose o ostacoli, il che significa
che il sistema garantisce un netto
miglioramento in termini di sicurezza.
La prima generazione
Nel sistema sviliuppato da Fujitsu
in Giappone, quattro telecamere
Ntsc sono integrate negli specchietti
anteriori, posteriori e nei due esterni. I
flussi di immagini vengono sincronizzati
nel multiplexer Fpga. Le quattro
immagini singole vengono combinate
in un’unica immagine, per cui ogni
quadrante contiene le informazioni
provenienti da una telecamera. Il
flusso di dati viene letto in una delle
interfacce di acquisizione video di un
processore applicativo Jade. Il flusso
video viene proiettato sul modello a
poligoni tridimensionale mediante il
motore grafico 2D/3D integrato. I dati
geometrici e strutturali dei modelli di
auto possono essere facilmente inseriti
nell’applicazione dalla flash. Il
rendering è stato specificato
in OpenGL e, come il sistema
target, opererà su normali Pc.
Con la continua introduzione
di dispositivi mobili nuovi,
aumentano le aspettative
verso una grafica di qualità
elevata e quindi display
più grandi con risoluzioni
maggiori. Allo stesso tempo
si presentano nuovi problemi
in termini di scalabilità, tipi di
componenti e tool di sviluppo
necessari. Fujitsu affronta
questi problemi presentando
una soluzione scalabile
che fornisce, oltre ai tool di sviluppo,
l’hardware e il software. Con la seconda
generazione di processori applicativi
Emerald MB86R11 (Fig. 2), si
offrono funzioni più potenti e avanzate.
Un core Arm Cortex-A9 è usato,
insieme a un motore Smid Arm-neon,
come kernel di calcolo. Per l’interfaccia
di memoria sono supportate memorie
Sdram Ddr2-800 e Ddr3-1066, oltre
a memorie flash Nand, Nor e Nand
gestite. L’unità grafica 2D è progettata
per supportare operazioni di rotazione
veloce, masking, scaling e copia e
visualizzare cover flow, testi e pointer.
Gli shader possono essere programmati
nell’unità grafica 3D, supportati dal
linguaggio OpenGL ES 2.0. Questa
architettura ibrida impedisce che
l’unità grafica 3D venga bloccata da
operazioni grafiche semplici. La serie
offre fino a tre display indipendenti
che supportano risoluzioni specifiche
per l’ambiente embedded, tra cui Dual
Svga. Frequenze di refresh elevate
consentono un adeguato trasferimento
dei dati. Il processo multilayer, in cui
ogni controller ha a disposizione fino
a 8 layer, consente di visualizzare gli
elementi grafici secondo un ordine di
priorità. Sono inoltre previste interfacce
obbligatorie, tra cui MediaLB, Apix e
Can.
Jürgen Betz
Fujistu Semiconductor
www.fme.fujitsu.com
febbraio
maggio 2011
55