Regolatori di Tensione
I circuiti regolatori di tensione sono presenti in qualunque circuito elettronico con lo scopo di
fornire le precise tensioni di alimentazione necessarie per il funzionamento dei circuiti elettronici
analogici e digitali a partire dalle sorgenti primarie di potenza elettrica, ad esempio, la rete di
distribuzione di energia elettrica per le utenze domestiche o industriali, oppure l’alternatore e
la batteria negli autoveicoli. Più precisamente, un circuito regolatore di tensione è progettato per
fornire una tensione di uscita costante, precisa ed indipendente da ogni possibile causa di variazione,
ossia indipendente dalla corrente assorbita dal carico, dalla tensione di ingresso, dalle condizioni
ambientali e dall’invecchiamento.
I regolatori di tensione appartengono alla categoria dei circuiti elettronici di potenza dato che la
loro funzione è legata alla gestione della potenza elettrica piuttosto che alla elaborazione di informazioni. In tali sistemi, tuttavia, è comunque necessario acquisire ed elaborare delle informazioni
per ottenere un determinato obiettivo (ad esempio, una tensione di uscita costante ed indipendente
dalle variabili esterne). Per tale ragione, i regolatori di tensione sono considerati sistemi elettronici
e non elettrici.
In ciò che segue saranno introdotti i regolatori di tensione. A tale scopo, saranno presentati
i principali parametri dei regolatori di tensione e saranno descritte e confrontate tra loro le due
principali categorie di circuiti regolatori, vale a dire i regolatori lineari e a commutazione (switching).
1
Parametri di un regolatore di tensione
Un regolatore di tensione è progettato per fornire una tensione di uscita costante, precisa ed indipendente da ogni possibile causa di variazione, ossia indipendente dalla corrente assorbita dal
carico, dalla tensione di ingresso, dalle condizioni ambientali e dall’invecchiamento. I principali
parametri di un regolatore di tensione sono:
• il rendimento,
η=
POUT
PIN
(1)
ossia il rapporto tra potenza elettrica POUT fornita al carico e potenza elettrica PIN assorbita
dall’ingresso. Il rendimento è un parametro molto importante e va considerato per evitare
sia spreco di energia elettrica, sia problemi di dissipazione del calore, visto che la potenza
elettrica dissipata
PD = PIN − POUT = PIN (1 − η)
è convertita in calore.
1
• L impedenza d’uscita,
Zout =
∆VOUT
.
∆IOUT
(2)
che esprime il rapporto tra variazione della tensione d’uscita, ∆VOUT e variazione della corrente assorbita dal carico ∆IOUT . Più è bassa, più la tensione di uscita è indipendente
dalla corrente del carico, cioè più il regolatore di tensione è simile ad un generatore ideale di
tensione.
• Il coefficiente di regolazione rispetto alle variazioni della tensione in ingresso,
Sin =
∆VOUT
.
∆VIN
(3)
che esprime il rapporto tra variazione della tensione d’uscita, ∆VOUT e variazione della tensione d’ingresso ∆VIN . Questo coefficiente è spesso espresso in decibel in funzione della
frequenza.
• Il coefficiente di temperatura,
∆VOUT
(4)
∆T
che esprime il rapporto tra variazione della tensione d’uscita, ∆VOUT e variazione di temperatura ∆T , fornendo quindi un’indicazione della sensibilità della tensione di uscita alle
variazioni di temperatura.
ST =
I regolatori di tensione possono essere raggruppati un due categorie:
• regolatori lineari
• regolatori a commutazione (o switching)
Le principali caratteristiche di queste due categorie saranno descritte nel seguito.
2
2
Regolatori lineari
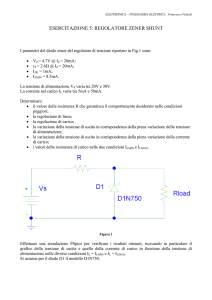
La Fig.1a riporta lo schema circuitale di un semplice regolatore lineare di tensione. Questo circuito
contiene al suo interno un diodo Zener, la cui caratteristica tensione-corrente è riportata in Fig.2.
Tale dispositivo, è polarizzato dalla tensione di ingresso VIN nella regione di funzionamento detta
regione di breakdown Zener attraverso il resistore R.
Con riferimento allo schema di Fig.1a, per la legge di Kirchoff delle tensioni, si ha che
VIN − VOUT
(5)
R
Dal momento che la corrente I = −IZ e la tensione VOUT = −VZ sono legate tra loro dalla
caratteristica IZ = f (VZ ) del diodo Zener, la tensione VOUT può essere valutata imponendo
I=
VIN − VOUT
(6)
R
La (6) è un’equazione non lineare e può essere risolta graficamente, considerando l’intersezione della
retta di carico
VIN − VOUT
I=
R
con la caratteristica del diodo Zener
I = −f (−VOUT )
−f (−VOUT ) =
nel piano (VOUT , I). Questa procedura grafica è illustrata in Fig.3a, con riferimento a diversi valori
della tensione d’ingresso VIN .
Si può osservare che, per VIN > VZ0 , lo Zener è polarizzato nella regione di breakdown Zener,
e la tensione di uscita VOUT è molto prossima al valore nominale della tensione Zener, VZ0 , ed è
quasi indipendente dalle variazioni della tensione d’ingresso, dal momento che la pendenza della
caratteristica dello Zener nella regione di breakdown è molto ripida. Sulla base di queste osservazioni,
visto che la tensione VOUT è praticamente costante al variare di VIN , il circuito in Fig.1a può
considerarsi un regolatore di tensione.
Introducendo un carico esterno RL che assorbe una corrente IOUT dall’uscita del regolatore di
tensione che abbiamo appena considerato, come mostrato in Fig.1b, l’equazione (6) diventa
VIN − VOUT
− IOUT .
(7)
R
La soluzione grafica della (7) è illustrata in Fig.3b per una tensione di ingresso costante e per
diversi valori della corrente assorbita dal carico, IOUT . Si può osservare che se
−f (−VOUT ) =
IOUT >
VIN − VOUT
,
R
R
R
I
VIN
I
VOUT
VIN
a)
IOUT
RL
VOUT
b)
Figura 1: Semplice circuito di regolatore lineare di tensione in assenza di carico (a) e con il carico
collegato (b).
3
Figura 2: Simbolo e caratteristica tensione-corrente IZ (VZ .
Figura 3: Soluzione grafica dell’equazione (5) nel piano (VOUT , I) per diversi valori della tensione
d’ingresso VIN (a) e, soluzione grafica dell’equazione (7) nel piano (VOUT , I) per diversi valori della
corrente di carico IOUT (b).
lo Zener non è più polarizzato nella regione di breakdown e la tensione di uscita dipende sia dalla
tensione in ingresso, sia dalla corrente assorbita dal carico. Anche nel caso in cui
IOUT <
VIN − VOUT
,
R
tuttavia, la tensione d’uscita può risentire leggermente della corrente assorbita dal carico, dal
momento che la pendenza della caratteristica IZ = f (VZ ) dello Zener in regione di breakdown non è
infinita. Per questa ragione, è altamente raccomandabile che la corrente di polarizzazione del diodo
Zener non sia in relazione con la corrente assorbita dal carico.
A questo scopo si introduce il regolatore di tensione in Fig.4. In questo circuito, un regolatore
basato su diodo Zener, simile a quello in Fig.5a fornisce la tensione di ingresso ad un amplificatore di tensione realizzato con un operazionale retroazionato negativamente. Dal momento che
l’operazionale non assorbe idealmente alcuna corrente dal suo ingresso non-invertente, il regolatore
basato su diodo Zener non deve fornire alcuna corrente IOUT in uscita ed opera perciò in condizioni
4
Figura 4: Circuito regolatore lineare di tensione.
Figura 5: Regolatore lineare di tensione con stadio di uscita a drain comune
ottimali di polarizzazione. Di conseguenza, la tensione d’uscita del regolatore può essere espressa
come
)
(
R2
VOUT = 1 +
VZ
(8)
R1
ed è largamente indipendente dalla corrente di uscita del regolatore, dal momento che è mantenuta
costante da un anello di retroazione negativa ad alto guadagno.
La dipendenza residua della tensione di uscita dalla tensione di ingresso nel circuito in Fig.4 può
essere messa in relazione sia alla leggera dipendenza della tensione VZ dalla tensione di ingresso,
che è stata messa in luce in Fig.3a, sia in relazione al valore finito del coefficiente di reiezione
delle variazioni della tensione di alimentazione (PSRR) dell’amplificatore operazionale utilizzato,
dal momento che la tensione di alimentazione dell’operazionale è VIN .
Dal momento che la corrente di uscita IOUT può essere molto elevata, è necessario introdurre in
uscita uno stadio amplificatore con elevata capacità di pilotaggio in corrente. Lo stadio amplificatore
deve poter garantire una elevata massima corrente erogabile e deve essere in grado di dissipare la
potenza
PD = (VIN − VOUT )IOUT .
che è convertita in calore all’interno del regolatore.
5
IOUT
IIN
Regolatore
di tensione
VIN
VOUT
IS
Figura 6: Schema a blocchi di un regolatore di tensione.
2.1
Rendimento
Per discutere del rendimento di un regolatore lineare di tensione, si consideri lo schema a blocchi
di Fig.6. Con riferimento a tale schema, la tensione di uscita VOUT di un regolatore di tensione
lineare è sempre minore della tensione di ingresso VIN . Inoltre, per la legge di Kirchoff delle correnti
IOUT = IIN − IS < IIN .
La corrente IS , che è necessaria al funzionamento del regolatore, è spesso trascurabile dal momento
che è molto più piccola di quella erogata al carico (IOUT ). Inoltre, un regolatore di tensione lineare
richiede che la differenza tra tensione in ingresso e tensione in uscita
VDO = VOUT − VIN ,
nota come tensione di dropout, sia sempre maggiore di un valore minimo VDO,min (tipicamente
qualche Volt), specificato dal costruttore. Ad esempio, con riferimento al regolatore lineare di
tensione in Fig.5, si può osservare che la tensione di ingresso deve essere maggiore della minima
tensione di dropout specificata VDO,min al fine di polarizzare opportunamente (in regione lineare) il
transistore dello stadio finale.
Dal momento che PIN = VIN IIN e POUT = VOUT IOUT , ne segue che il rendimento η di un
regolatore di tensione lineare può essere espresso come
η=
POUT
VOUT IOUT
VOUT
=
≃
PIN
VIN IIN
VIN
(9)
La potenza elettrica dissipata (e quindi convertita in calore) all’interno del regolatore è esprimibile come
PD = PIN − POUT = VIN IIN − VOUT IOUT ≃ (VIN − VOUT )IOUT = VDO IOUT .
(10)
ed è quindi data dal prodotto della tensione di dropout e della corrente erogata al carico.
Dal momento che la tensione in ingresso normalmente non è costante, a causa delle variazioni
nella sorgente primaria di energia e/o per l’oscillazione residua (ripple) ∆V , un circuito comprendente un regolatore di tensione lineare deve essere progettato in modo tale da garantire che la
tensione di dropout sia maggiore del valore minimo specificato VDO,min anche quando la tensione di
ingresso è minima (caso peggiore), cioè
VIN,min − VOUT > VDO,min .
La necessità di rispettare la precedente condizione in relazione al caso peggiore di tensione in
ingresso minima, tuttavia, dà luogo ad una significativa penalizzazione in termini di rendimento
6
L
A
S1
VIN
IOUT
vA
S2
C
VOUT
RL
Figura 7: Convertitore DC-DC a commutazione.
Figura 8: Forme d’onda delle principali tensioni nel circuito in Fig.7.
dal momento che, per la maggior parte del tempo, VIN > VIN,min . Tenendo conto della (9), questa
penalizzazione nel rendimento è tanto più significativa quanto più bassa è la tensione di uscita del
regolatore, come nel caso degli alimentatori per i moderni circuiti digitali che operano a bassissima
tensione.
3
Regolatori a commutazione
I regolatori di tensione a commutazione sono stati sviluppati al fine di ottenere prestazioni in
termini di efficienza molto più elevate rispetto ai regolatori di tensione lineari e sono al giorno
d’oggi molto diffusi in tutti gli apparati elettronici, in particolare in quelli utilizzati a bordo auto.
Per comprendere il funzionamento di un regolatore di tensione a commutazione, vediamo ora come
sia possibile realizzare un convertitore DC-DC ad elevato rendimento e configurabile (ossia un
dispositivo che converte un valore di tensione continua in un altro valore di tensione continua senza
perdita di potenza, cosı̀ come avviene in un trasformatore per le tensioni alternate), utilizzando
interruttori commutati periodicamente ed un filtro passa-basso LC.
7
3.1
Principio di funzionamento
Il principio di funzionamento di un regolatore di tensione a commutazione verrà ora illustrato facendo riferimento al circuito in Fig.7, che è in grado di convertire una tensione di ingresso VIN in una
tensione di uscita VOUT diversa ai capi di un carico RL senza (idealmente) dissipazione di potenza.
In questo circuito, gli interruttori S1 ed S2 sono commutati periodicamente in controfase (quando
S1 è acceso, S2 è spento e viceversa) con periodo T , come mostrato in Fig.8, dove T = T1 + T2 .
Nella stessa figura è anche riportata la forma d’onda della tensione vA . Si può osservare che vA è
uguale VIN fintanto che l’interruttore S1 è acceso (ossia durante il tempo indicato con T1 ), mentre
è uguale a zero quando S2 è acceso (cioè durante T2 ). Dato che la funzione di trasferimento del
filtro LC in Fig.7 è
1
1
jωC
,
H(f ) = 1
=
1 − ω 2 LC
jωC + jωL
1
se si sceglie √LC
≪ ω0 = 2πf0 = 2π
T , allora il filtro passa basso LC rigetta le componenti armoniche
della forma d’onda di Fig.8 tranne la componente continua, la quale corrisponde al valore medio di
vA , cioè
∫
1 T
vA (t)dt
VOUT =
T 0
∫
∫
1 T1
1 T
=
vA (t)dt
vA (t)dt +
T 0
T T1
∫
∫
1 T1
1 T
0dt
=
VIN dt +
T 0
T T1
T1
=
VIN + 0 = DVIN
(11)
T
dove D = TT1 è il duty cycle, cioè il rapporto del tempo di accensione T1 diviso per la durata dell’intero periodo T del segnale ad onda quadra che pilota S1. Sulla base della (11), è possibile ottenere
con semplicità un qualsiasi valore VOUT < VIN della tensione di uscita pilotando gli interruttori S1
ed S2 con un opportuno duty cycle.
8
3.2
Rendimento
Considerando interruttori e componenti reattivi ideali, il regolatore in Fig.7 presenta un rendimento
η = 100%, dal momento che in un interruttore ideale acceso o spento non si ha mai dissipazione
di potenza1 cosı̀ come non viene dissipata alcuna potenza in componenti reattivi ideali (L e C).
In pratica, una certa potenza elettrica è dissipata negli interruttori accesi a causa della loro resistenza non nulla in fase di conduzione (perdite di conduzione) ed una certa energia è dissipata in
corrispondenza delle commutazioni (perdite di commutazione), perchè le transizioni acceso-spento
e spento-acceso degli interruttori reali non sono istantanee e durante queste transizioni si ha contemporaneamente una corrente che fluisce attraverso l’interruttore ed una tensione non nulla ai
suoi capi. Dal momento che una certa quantità di energia ESW viene dissipata in corrispondenza
di ciascuna commutazione, la potenza dissipata per perdite di commutazione è proporzionale alla
frequenza di commutazione f . Infine, una certa quantità di potenza è dissipata negli elementi
parassiti di tipo resistivo del condensatore e dell’induttore. In un induttore reale, in particolare, vi
è dissipazione di potenza a causa della resistenza finita degli avvolgimenti ed a causa dell’isteresi
magnetica nel nucleo.
Tenendo conto dei meccanismi di dissipazione appena descritti, il rendimento di un un convertitore a commutazione reale non sarà pari al 100%, ma sarà comunque molto alto (η = 80% − 90%).
Di conseguenza, il circuito in Fig.7 converte una tensione in ingresso in una differente tensione
d’uscita con efficienza molto elevata, comportandosi come un trasformatore per tensioni continue.
3.3
Regolatori a commutazione ad anello chiuso
Il principio di funzionamento dei convertitori a commutazione appena descritto può essere utilizzato
per fornire una tensione di uscita costante ed indipendente dalla tensione di ingresso, dalla corrente
assorbita dal carico e dalla temperatura di funzionamento. A questo scopo, è necessario controllare
opportunamente il duty cycle D mediante un sistema ad anello chiuso in modo tale da contrastare
le variazioni su VOUT che possono derivare da variazioni della tensione di ingresso, della corrente
assorbita dal carico, ecc..., cosı̀ che la tensione di uscita VOUT rimanga costante. La descrizione
dettagliata delle strategie di controllo che possono essere adottate a questo scopo esula dalle finalità
di questo corso. Si descriverà soltanto in linea di principio, con riferimento alla Fig.9, la più semplice
di queste tecniche, che sfrutta direttamente il principio della retroazione negativa.
Per ottenere una tensione di uscita costante VOUT , è necessario disporre di una tensione di
riferimento. Questa tensione di riferimento è confrontata con una partizione βVOUT della tensione
di uscita, in modo da ottenere il segnale d’errore ε = VREF − βVOUT . Il segnale d’errore ε è
quindi amplificato e posto in ingresso ad un modulatore a larghezza di impulso (meglio noto come
modulatore pulse width modulation, o modulatore PWM), che genera un segnale ad onda quadra
il cui duty cycle è proporzionale alla tensione d’ingresso.
Un modulatore PWM può essere implementato come mostrato in Fig.10. In questo circuito, il
segnale d’errore amplificato Vε è confrontato, mediante un comparatore di soglia, con un segnale
triangolare vST (t) di frequenza f pari alla frequenza scelta come frequenza di commutazione per
l’interruttore ed ampiezza di picco Vpk . La funzione del comparatore di soglia è di confrontare la
tensione presente ad uno dei suoi due terminali di ingresso con quella presente all’altro terminale e
generare una alla propria uscita una tensione alta oppure bassa a seconda di quale dei due ingressi
ha valore maggiore. Di conseguenza, quando il segnale triangolare è al di sopra di Vε , la tensione
all’uscita del comparatore ha un valore alto mentre quando è al di sotto di Vε , l’uscita ha un valore
1
La potenza dissipata in un interruttore è data da PD = vSW iSW . In un interruttore ideale acceso si ha che
vSW = 0, mentre in un interruttore ideale spento si ha che, iSW = 0. Quindi, in entrambi i casi PD = 0.
9
D
Convertitore DC-DC
a commutazione
VIN
VOUT
PWM
D=kVe
Ve
Amplificatore
d’errore
bVOUT
VREF
Figura 9: Regolatore a commutazione ad anello chiuso.
più basso (ad esempio, la tensione di riferimento). Il segnale di uscita del comparatore è quindi
un segnale ad onda quadra che, per ciascun periodo dell’onda triangolare, è allo stato alto fino a
quando
Vpk
t < Vε ,
(12)
vST (t) =
T
mentre è allo stato basso nel resto del periodo. Questo vuol dire che il duty cycle della tensione di
uscita è esprimibile come
Vε
D=
(13)
Vpk
ed è quindi proporzionale al segnale Vε . Il segnale di uscita del comparatore può quindi essere
utilizzato per pilotare gli interruttori di un convertitore DC-DC a commutazione per chiudere
l’anello di retroazione.
10
_
+
vST
vPWM
Ve
vST
Vpk
Ve
t
T=1/f
vPWM
T1
t
T2
Figura 10: Modulatore PWM e relative forme d’onda.
11