Esercitazione n° 5: Stadi di uscita
Esercitazione n° 5: Stadi di uscita
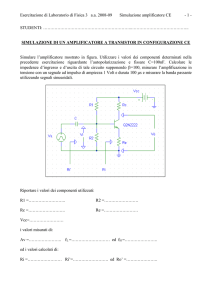
1) Per il circuito in Fig. 1 sostituire il generatore di corrente
con uno specchio di corrente. Dimensionare quest'ultimo in
modo tale da ottenere la massima dinamica di uscita con la
minima potenza dissipata.
Sia noto che: VCC = +/- 15 V; RL = 100 Ω; VCEsat(Q1) = 0,2 V; βQ1 = 50.
Fig. 1: Stadio di uscita in classe A.
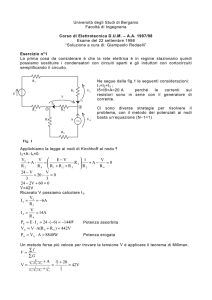
Per prima cosa riportiamo il circuito reale in Fig. 2, dove al posto del
generatore IBIAS viene sostituito uno specchio di corrente. Ora per
dimensionare lo specchio di corrente, secondo le specifiche di progetto,
bisogna valutare la caratteristica di trasferimento del circuito.
Osserviamo che, anche ad ampio segnale, vale sempre la relazione:
V out =V i−V be
Quindi se possiamo trascurare le variazioni di Vbe, la tensione di uscita
segue quella di ingresso a meno di una “costante”. Per valutare i limiti
di funzionamento bisogna capire cosa accade nei due casi limite: Q 1 in
saturazione e Q1 in interdizione. Nel primo caso si ha che la tensione di
uscita raggiunge un massimo dato da:
V ' outMAX =V CC −V CEsat Q1
1
Esercitazione n° 5: Stadi di uscita
Fig. 2: Stadio di uscita in classe A polarizzato con specchio di corrente.
Nel secondo caso si ha che la tensione di uscita dipenderà dalla
condizione di funzionamento di Q2: infatti se Q2 entra in saturazione
prima della interdizione di Q1, la tensione di uscita si arresterà ad un
valore pari a:
V ' ' outMIN =I Q2 R L
Se invece Q2 entra in saturazione dopo l'interdizione di Q1, allora l'uscita
arriverà ad un valore:
V ' ' outMIN =−V CC V CEsat Q2
A questo punto ci rendiamo conto che la massima dinamica di uscita si
ottiene se Q2 entra in saturazione dopo l'interdizione di Q 1. Dal
momento che viene richiesto di minimizzare la dissipazione di potenza,
qual'è allora il minimo valore di corrente da imporre allo specchio di
corrente? Tale valore si ottiene semplicemente imponendo che Q 2 entri
in saturazione proprio in corrispondenza dell'interdizione di Q1.
Inoltre è ovvio concludere che il transistore Q 2 deve essere identico (da
un punto di vista tecnologico) a Q1 per avere simmetria ed, inoltre, una
corrente statica (a risposo) nulla nel carico RL.
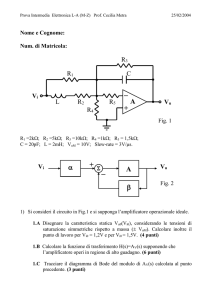
Tutto quanto detto è ben rappresentato
trasferimento riportata in Fig. 3:
dalla
caratteristica
di
2
Esercitazione n° 5: Stadi di uscita
Fig. 3: Caratteristica di trasferimento di uno stadio finale in classe A.
Ora siamo in grado di dimensionare il resistore R dello specchio di
corrente.
La
condizione
per
la
quale
Q1
si
interdice
contemporaneamente alla saturazione di Q2 si ottiene imponendo la
seguente uguaglianza:
I Q2 R L =V CC −V CEsat
Quindi:
I Q2 =
V CC −V CEsat
≈148 mA
RL
Questa è la corrente ottimale di polarizzazione dello stadio di uscita.
Ora imponendo allo specchio tale corrente (supponiamo Q 3 = Q2,
altrimenti bisognerebbe portare in conto il rapporto di aspetto delle
aree di emettitore dei due transistori):
R( I C3+2 I B3,2 )+V BE =V CC
3
Esercitazione n° 5: Stadi di uscita
da cui ricaviamo:
R=
V CC −V BE
≈92Ω
2
I C3 (1+ β )
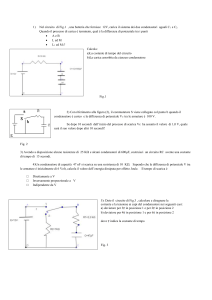
Di seguito si riporta una simulazione SPICE (Fig. 5) con relativo
schematico utilizzato in LTspice IV (Fig. 4) per convalidare l'analisi
appena fatta.
Fig. 4: Circuito realizzato in LTspice IV per la simulazione della caratteristica di
trasferimento.
4
Esercitazione n° 5: Stadi di uscita
Fig. 5: Simulazione SPICE della caratteristica di trasferimento dello stadio di uscita
in classe A.
È stata ripetuta la simulazione imponendo una minore corrente per Q 2
(si è imposto R = 250 Ω), e come è possibile vedere nella Fig. 6, il limite
sulla dinamica di uscita è imposto dalla saturazione di Q 2 in netto
anticipo rispetto alla interdizione di Q1.
Fig. 6: Simulazione SPICE della caratteristica di trasferimento dello stadio di uscita
in classe A con R = 250 Ω.
5
Esercitazione n° 5: Stadi di uscita
2) Per il circuito in Fig. 2 determinare: il rendimento in
potenza; la massima potenza erogata al carico; la massima
potenza dissipata su Q1 e Q2 e corrente massima sostenibile da
Q1.
Ricordiamo che il rendimento di conversione si definisce come:
η=
PL
PA
dove si è indicato con PL la potenza media trasferita al carico e con PA la
potenza media assorbita dalle alimentazioni. Supponiamo di applicare
un segnale sinusoidale in ingresso del tipo (con Ap valore di picco):
V i =A p sin ω t
se trascuriamo la caduta di tensione Vbe, l'uscita sarà:
V out =A p sin ω t
Per tale motivo, la potenza istantanea fornita al carico varrà:
V 2out A2p sin ω t
p L (t)=
=
RL
RL
Il valor medio sul periodo sarà dunque:
2
A
1
P L = ∫T p (t)dt= p
T
2R L
Per quanto riguarda la potenza assorbita dalle alimentazioni, bisogna
valutare separatamente le due alimentazioni positiva e negativa. Per
quella negativa abbiamo che la corrente assorbita da Q 2 è costante e
pari (nel nostro caso) a:
I Q2≈
V CC
RL
Inoltre bisogna valutare la corrente assorbita da Q 3, che nel nostro caso
semplificato è pari a quella di Q2, quindi in definitiva:
2
P Aneg=2
V CC
RL
6
Esercitazione n° 5: Stadi di uscita
La potenza erogata dall'alimentazione positiva è variabile nel tempo e
dipende dal segnale di ingresso. Ciò che sappiamo è che sarà di tipo
sinusoidale, con valor minino nullo (quando Q 1 è interdetto) e valor
massimo, dato dalla somma della corrente di polarizzazione di Q 2 e
dalla corrente massima nel carico (pari a circa V CC/RL). Quindi in
definitiva, la corrente media erogata dalla alimentazione positiva è pari
a:
2
V CC
P Apos=
RL
In definitiva avremo che il rendimento di conversione sarà:
η=
P L A2p RL
≈
2
P A 2 R L 3 V CC
il valore massimo si avrà quando l'uscita sarà massima, ovvero pari alla
tensione di alimentazione (trascuriamo la VCEsat):
V 2CC R L
ηmax≈
≈16,7 %
2 R L 3V 2CC
In realtà tale risultato è inficiato pesantemente dalla potenza dissipata
dal transistore Q3. Infatti se si fa in modo di utilizzare un transistore Q 3
con area di emettitore molto minore rispetto a Q 2, allora potremmo
trascurare la sua corrente ed ottenere un risultato nettamente migliore:
2
V
RL
ηmax≈ CC
≈25%
2
2 R L 2 V CC
che corrisponde al massimo teorico ottenibile con uno stadio di uscita in
classe A.
Dopo tale analisi, i successivi risultati sono immediati. Infatti si avrà
che:
2
P Lmax ≈
V CC
=1,125W
2R L
La potenza media (nel caso peggiore) dissipata su Q 1 può essere
espressa come:
7
Esercitazione n° 5: Stadi di uscita
P Q1=
1
[V −V outMAX (t)][I Q2+i L (t )]dt
T ∫T CC
ovvero:
P Q1≈
1
[V I +V CC I Q2 sin ω t−V CC I Q2 sin ω t−V CC I Q2 sin 2 ωt ] dt
T ∫T CC Q2
in definitiva si ottiene:
1
P Q1≈V CC I Q2− V CC I Q2≈1,11 W
2
Analogamente è facile verificare che:
P Q1=
1
[V
(t)−(−V CC )] I Q2 dt≈V CC I Q2=2,22 W
T ∫T outMAX
In fine la massima corrente che deve erogare Q 1 è semplicemente pari
a:
I Q1max =I Q2+i Lmax =2 I Q2=0,296 A
8
Esercitazione n° 5: Stadi di uscita
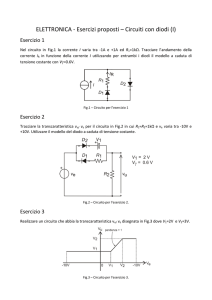
3) Per il circuito in Fig. 7: dimensionare le tensioni di
alimentazioni affinché la potenza massima fornita al carico sia
20 W e contemporaneamente garantire un margine di 5 V tra
tensione massima di uscita e tensione di alimentazione.
Calcolare inoltre il rendimento di conversione.
Sia noto: RL = 4 Ω.
Fig. 7: Stadio di uscita in classe B.
Nell'ipotesi di applicare all'ingresso un segnale di tipo sinusoidale, la
potenza media di uscita si può esprimere analogamente al caso dello
stadio di uscita in classe A, ovvero:
2
Ap
1
P L = ∫T p (t )dt =
T
2R L
da questa espressione ricaviamo che l'ampiezza massima della
tensione di uscita dovrà essere pari a:
A pMAX =√ 2 R L P L≈12,6V
9
Esercitazione n° 5: Stadi di uscita
La seconda specifica, ovvero quella di avere la tensione di
alimentazione VCC sempre almeno 5 V al di sopra della tensione di
uscita è legata alla necessità di evitare fenomeni di distorsione dovuti
al taglio della forma d’onda di uscita.
Il valore massimo della tensione di uscita è quello di 12.6V appena
calcolato, dal che possiamo valutare la tensione di alimentazione come:
V CC >12,6+5V =17,6V
Scegliamo, a tal punto, di porre VCC = 18 V.
Per valutare il rendimento di conversione bisogna valutare la potenza
media assorbita dalle alimentazioni. Data la simmetria del circuito, la
potenza media assorbita dalle alimentazioni positive è uguale a quella
assorbita dalle alimentazioni negative. Quindi si avrà:
P Alim=
π
V CC π
V CC π
V CC
Ap
1
2
V
I
dt=
I
d
ω
t=
I
d
ω
t=
2
sin ω t d ω t
∫
∫
∫
∫
CC
Vcc
Vcc
L
π
π
π
0
0
0 R
T /2 T /2
L
Infine:
V A
P Alim=2 πCC p
RL
L'efficienza di conversione sarà pari (nel caso massimo teorico) a:
V 2CC π R L π
ηmax≈
= ≈78,5 %
2
2 R L 2 V CC
4
nel nostro caso, essendo VoMAX minore di VCC, si avrà:
ηmax≈
A2p π R L π A2p
=
≈38,5 %
2
2 R L 2 V CC
4 V 2CC
10
Esercitazione n° 5: Stadi di uscita
4) Progettare uno stadio di uscita Push-Pull in classe AB con singola
alimentazione, rete di polarizzazione a diodi e potenza di uscita
1W.
Sia noto che: RL = 4 Ω; VCEsat = 0,2 V; β = 50.
Come prima cosa, riportiamo il circuito completo da progettare:
Fig. 8: Stadio di uscita in classe AB con singola alimentazione.
Si osservi che gli amplificatori a simmetria complementare (classe B)
dispongono di doppia alimentazione. Questa soluzione rappresenta un
costo ed una difficoltà in termini di costruzione. Nel caso si debba
amplificare un segnale compreso in una banda di frequenze (quindi non
si necessita della componente continua, come nel campo audio), è
possibile inserire sul percorso del segnale dei condensatori che
permettono soluzioni ad alimentazione singola. In riferimento al circuito
di Fig. 8 si ha che in assenza di segnale di ingresso (V i = 0), le basi dei
due bjt vengono polarizzate al potenziale ½ V CC (per ora trascuriamo le
cadute sui due diodi utili a realizzare una polarizzazione in classe AB)
mediante le due resistenze R. In questa situazione anche gli emettitori
si troveranno al potenziale ½ VCC. I condensatori Ci e CL impediscono
circolazione di corrente continua nel generatore di ingresso e nel carico
di uscita. È facile verificare che quando, invece, è presente il segnale di
ingresso, il funzionamento dello stadio di uscita resta invariato rispetto
al caso a doppia alimentazione.
11
Esercitazione n° 5: Stadi di uscita
Le relazioni analizzate per lo stadio di uscita in classe B con doppia
alimentazione, restano valide anche in questo caso. Bisogna solo
osservare che:
V oMAX =
V CC
2
quindi si avrà:
P L=
2
A2p V 2CC 1
V CC
1
p
(t)dt
=
=
=
∫
T T
2R L
4 2 RL 8 RL
V 2CC 1
P AlimMAX =
(c'è una sola alimentazione)
π RL 2
In definitiva troviamo (come ci aspettavamo) che il rendimento
massimo teorico non cambia.
Per trovare la tensione di alimentazione, utilizziamo il vincolo sulla
potenza massima di uscita, quindi:
A pMAX =√ 8 RL P L ≈5,66 V
Tenendo conto delle VCEsat, scegliamo una VCC = 6 V.
Ora bisogna dimensionare le due resistenze R. Esse debbono essere
ovviamente uguali e far scorrere una corrente nei diodi tale da
verificare sempre la condizione:
I R> I bMAX
dove IbMAX rappresenta la massima corrente di segnale che viene
assorbita dalle basi dei due transistori del totem di uscita. Per trovare
tale corrente ancora una volta utilizziamo il vincolo sulla massima
potenza di uscita:
I bMAX =
√
I cMAX 1 2 P L 0,707
=
=
≈14,14 mA
β
β RL
50
Scegliamo nel nostro caso IR = 20 mA, e quindi dimensioniamo
opportunamente le R come:
12
Esercitazione n° 5: Stadi di uscita
2 R=
V CC −2V BE
≈230Ω → R=115Ω
20 mA
Di seguito riportiamo due simulazioni SPICE, dove in un primo caso
viene fatta una simulazione in transitorio del circuito appena realizzato.
Nel secondo caso viene fatta una simulazione dello stesso circuito, ma
in classe B dove viene eliminata la rete di polarizzazione a diodi. La Fig.
9 mostra lo schematico realizzato in LTspice, mentre le Fig. 10 ed 11
mostrano i risultati delle simulazioni.
Fig. 9: Circuito realizzato in LTspice IV per la simulazione dello stadio di uscita in
classe AB con singola alimentazione.
13
Esercitazione n° 5: Stadi di uscita
Fig. 10: Simulazione SPICE in transitorio dello stadio di uscita in classe AB con
singola alimentazione.
Fig. 11: Simulazione SPICE in transitorio dello stadio di uscita in classe B con singola
alimentazione.
14
Esercitazione n° 5: Stadi di uscita
4) Determinare il guadagno di tensione complessivo per il
circuito in Fig.12 costituito da stadio pilota (driver) ad A.O. +
stadio finale in classe B. Si consideri l'A.O. ideale.
Siano noto che: R1 = 3,3 kΩ; R2 = 47 kΩ; R3 = 3,3 kΩ; RL = 4 Ω; VCC =
+/- 15 V; Q1 = Q2.
Fig. 12: Amplificatore in classe B con stadio pilota (driver) ad amplificatore
operazionale.
Per prima cosa ricordiamo semplicemente che per un A.O. in
connessione invertente possiamo ricavare la funzione di trasferimento
come segue (per ora trascuriamo la presenza di R 3). Da un bilancio di
correnti al nodo di ingresso invertente dell'amplificatore operazionale
otteniamo:
i Z1 =i Z2
(Impedenza di ingresso infinita)
quindi:
v s −v o
=
Z1 Z2
(Impedenza di uscita nulla, cortocircuito virtuale di ingresso)
15
Esercitazione n° 5: Stadi di uscita
Fig. 13: Amplificatore operazionale in configurazione invertente.
da cui:
Av =
vo
Z
=− 2
vs
Z1
Quindi semplicemente per il driver si ha:
Av =−
R2
V
≈−14,24
R1
V
Lo stadio finale in classe B ha un guadagno circa pari ad 1 nel caso
ideale. Nella realtà dipende bisognerebbe considerare la Vbe, quindi un
guadagno minore dell'unità. In prima approssimazione possiamo
assumere che per segnali di ingresso vs sufficientemente più grandi di
Vbe / Av il guadagno totale coincide con quello del primo stadio.
Di seguito (Fig. 14) si riporta lo schematico utilizzato in LTspice per
eseguire la simulazione SPICE in transitorio (riportata in Fig. 15) dove è
possibile verificare il risultato appena ottenuto.
Si osservi nello schematico del circuito la presenza di due condensatori
sulle due alimentazione del circuito operazionale. La presenza di tali
condensatori è dovuta ad un aspetto di tipo pratico. Infatti essi servono
a “shuntare” verso massa eventuali disturbi ad alta frequenza che
potrebbero accoppiarsi alle linee di alimentazioni ed innescare
fenomeni di autooscillazione nell'A.O. Da un punto di vista progettuale
si consiglia sempre di utilizzare condensatori da 100nF in prossimità dei
pin di alimentazione dell'A.O.
16
Esercitazione n° 5: Stadi di uscita
Fig. 14: Schematico in LTspice dell'amplificatore in classe B con driver ad
amplificatore operazionale.
Fig. 15: Simulazione SPICE in transitorio del circuito in Fig. 14.
17
Esercitazione n° 5: Stadi di uscita
Si osservi che nel circuito è presente anche un resistore sull'ingresso
dell'A.O. non invertente verso massa. Da un punto di vista
dell'amplificazione esso non incide. In realtà lo si utilizza per
compensare il problema delle correnti di offset di ingresso. Idealmente
un A.O. non assorbe corrente. Nella realtà, invece, ci sono correnti
molto piccole (qualche decina di pA nel caso di ingresso a JFET un po'
più grandi per ingressi a bjt). A causa di inevitabili asimmetrie presenti
nello stadio differenziale di ingresso, queste correnti fanno si che
l'uscita dell' A.O. sia diversa da zero anche con ingresso nullo. Infatti
guardando al seguente schema si ha (bilancio di correnti al morsetto
invertente):
Fig. 16: Correnti di offset di ingresso in un A.O.
i BIAS1=−
v 1 v o−v 1
(Le impedenze viste in DC hanno solo la parte reale)
+
R1
R2
Ricavando da questa v1 otteniamo:
v 1=−i BIAS1 R1∥R 2+v o
R1
≈−i BIAS1 R1∥R 2
R1+R2
Per annullare tale tensione di uscita bisogna portare l'ingresso non
invertente alla stessa tensione, quindi si inserisce una resistenza di
valore pari al parallelo tra R1 ed R2. (Facendo l'ipotesi che i BIAS1≈i BIAS2 ).
18
Esercitazione n° 5: Stadi di uscita
Un'altra osservazione riguarda la tipologia di amplificatore operazione
utilizzato. È facile intuire che allo stadio pilota è richiesta una corrente
di uscita significativa per pilotare correttamente lo stadio finale. Infatti
seppur il β di un bjt di potenza è dell'ordine di qualche decina (se il
transistore è progettato per piccole potenze, può anche superare 5060), ci rendiamo conto che per correnti di collettore elevate (qualche
Ampere o più) la corrente di base richiesta risulta considerevole. A
questo punto la scelta dell'amplificatore operazionale deve essere
oculata in tal senso. Nel nostro caso è stato utilizzato un A.O. LT1886
della Linear Technology di cui riportiamo un dettaglio del datasheet
nella figura di seguito:
Fig. 17: Dettaglio del datasheet dell' A.O. LT1886.
Come possiamo leggere, per tale operazionale, la massima corrente di
uscita si assesta intorno ai 200 mA, valore più che sufficiente per i
nostri scopi. Se per caso avessimo utilizzato un A.O. con una corrente
massima di uscita troppo bassa il circuito non avrebbe lavorato
correttamente, infatti di seguito viene fatta una simulazione con tale
“errore” progettuale:
19
Esercitazione n° 5: Stadi di uscita
Fig. 18: Simulazione SPICE in transitorio del circuito in Fig. 14. con un A.O. non adatto
a pilotare lo stadio di uscita.
Da tale simulazione viene fuori che per ampi segnali d'ingresso (i.e.
elevate correnti di uscita richieste per pilotare le basi dei transistori) si
ha una saturazione delle uscite dell'A.O. E di conseguenza dell'uscita
dello stadio in classe B. Tale saturazione introduce, ovviamente, un
elevato tasso di distorsione al segnale utile. Quindi bisogna sempre
tener conto del budget di corrente massima richiesta dallo stadio finale
nel progettare lo stadio driver.
20
Esercitazione n° 5: Stadi di uscita
5) Determinare il guadagno di tensione complessivo per il circuito
in Fig.19 costituito da stadio pilota (driver) ad A.O. + stadio
finale in classe B. Si consideri l'A.O. ideale.
Siano noto che: R1 = 3,3 kΩ; R2 = 47 kΩ; R3 = 3,3 kΩ; RL = 4 Ω; VCC = +/15 V; Q1 = Q2.
Fig. 19: Amplificatore in classe B con stadio pilota (driver) ad amplificatore
operazionale reazionato sull'uscita.
Osserviamo subito che siccome lo stadio di uscita è praticamente un
buffer unitario rispetto alle tensioni di ingresso-uscita, non
considerando il problema della distorsione di crossover, il guadagno di
tensione dell'intero amplificatore resta pressoché lo stesso del caso
precedente.
Il fatto che il resistore R 2 si trovi sull'uscita dello stadio finale permette
di sfruttare tutte le buone proprietà dei sistemi retroazionati
(linearizzazione dell'uscita, riduzione delle non linearità, etc. etc.) per
ridurre sensibilmente il problema della distorsione di incrocio.
In effetti i circuiti amplificatori (se non intervengono saturazioni o altre
non linearità) sono sistemi lineari: ad un ingresso di tipo sinusoidale
rispondono in uscita con un segnale sinusoidale iso-frequenziale con
l'ingresso con al più uno sfasamento ed una diversa ampiezza. Nel caso
21
Esercitazione n° 5: Stadi di uscita
in esame, accade però, che all'uscita dello stadio finale in classe B il
segnale utile viene distorto dal fenomeno del crossover. Quindi non
avremo più sul carico una sinusoide pura, ma un segnale periodico (alla
stessa frequenza del segnale di ingresso) più un numero infinito di
armoniche superiori (sviluppo in serie di Fourier). Tali armoniche
possono essere viste come un segnale di disturbo additivo al segnale
utile di uscita. È facile dimostrare che utilizzando una retroazione
negativa è possibile ridurre le non linearità di una quantità pari al tasso
di reazione. Il comportamento del circuito in Fig. 12 può essere
schematizzato come segue:
Fig. 20: Amplificatore con distorsione di non linearità: schema in catena aperta.
In assenza di reazione si ha semplicemente che:
v o = A v i v s
Considerando, invece, una retroazione negativa (come quella del
circuito di Fig. 19) possiamo avere la seguente schematizzazione:
Fig. 21: Amplificatore con distorsione di non linearità: schema con reazione.
22
Esercitazione n° 5: Stadi di uscita
In tal caso possiamo scrivere che:
v e =vi −v r =v i − v o
v o = A ve v s = Avi − vo v s
quindi:
v o 1 A= A v i v s
ovvero:
vo =
vs
A
vi
1A
1A
Questo risultato dimostra che il guadagno ad anello chiuso si riduce del
tasso di reazione, ma allo stesso tempo le non linearità si riducono dello
stesso fattore.
Nel caso in esame, l'amplificatore operazionale in connessione
invertente si configura come un amplificatore di transimpedenza in
quanto su di esso è operata una reazione di tipo parallelo-parallelo
(tansione-parallelo). Lasciamo al lettore la verifica che (vedi
esercitazione 4):
=
ir
1
=−
vo
R2
Ar =
vo
Av
Ai i R1∥R2
=− d =−
=−A R1∥R 2
ii
ii
ii
In definitiva:
1 Ar =1
A R1
R A1 R2
1 A R1 R 2
=1
= 1
R 2 R 1 R2
R 1 R2
R 1 R2
Supponendo, per esempio, un guadagno ad anello aperto pari a A =
104, è lecito porre che:
A1≈ A
R1 A≫ R2
23
Esercitazione n° 5: Stadi di uscita
ottenendo così il tasso di reazione come:
1 Ar =
A R1
≈656
R 1 R2
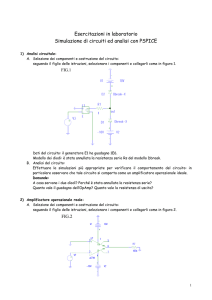
Nella Fig. 22 si riporta lo schematico realizzato in LTspice per effettuare
la simulazione in transitorio riportata in Fig. 23:
Fig. 22: Amplificatore in classe B con stadio pilota ad amplificatore operazionale e
reazione sull'uscita.
24
Esercitazione n° 5: Stadi di uscita
Fig. 23: Simulazione SPICE in transitorio del circuito in Fig. 14.
Come si può osservare, la distorsione di incrocio è praticamente
sparita. Tale affermazione si può verificare anche confrontando la FFT
delle uscite delle due configurazioni (con e senza reazione sull'uscita)
quando in ingresso al circuito è posta una sinusoide pura.
Fig. 24: FFT del segnale in uscita alla prima configurazione (senza reazione sull'uscita).
25
Esercitazione n° 5: Stadi di uscita
Fig. 25: FFT del segnale in uscita alla seconda configurazione (con reazione sull'uscita)
Come si vede chiaramente nel secondo caso le armoniche superiori
generate dal circuito sono di ampiezza inferiore rispetto al caso del
circuito senza reazione; indice di una più bassa distorsione di uscita.
26