Regolatori PID: dispositivi ad ampia diffusione industriale che
realizzano un algoritmo di controllo caratterizzato da tre azioni
sull’errore: Proporzionale – Integrale - Derivativa
Regolatori PID
L’algoritmo PID
Vantaggi:
buona efficacia nel controllo di molti processi industriali, in
relazione a specifiche di prestazione poco stringenti
possibile realizzazione con diverse tecnologie (mec., idr., elet.)
semplicità di utilizzo (taratura di 2-3 parametri)
non necessita approfondite conoscenze del processo
adeguato alle generalmente mediocri prestazioni dei componenti
presenti nel loop di controllo
Regolatori PID
1
Regolatori PID
PID trova larga applicazione in sistemi del tipo:
“stabili” o “autoregolanti”
µ·e-sL
P(s)=
(1+sT1)(1+sT2)
L = ritardo puro;
“non autoregolanti”
µ·e-sL
P(s)=
s(1+sT1)
Ti = costante di tempo;
Rapporto di controllabilità θ = L/T1 ≤ 1
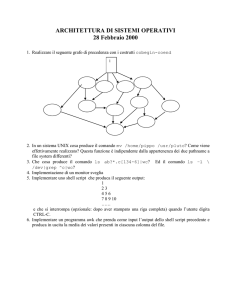
Regolatori PID
Regolatori PID
Kp
yd
e
Ki /s
u
P(s)
y
Kd s
Regolatori PID
2
Azione proporzionale
Componente più sensibile al valore attuale dell’errore
Un valore elevato di Kp comporta una reazione pesante anche per
variazioni modeste del valore dell’errore
Un valore basso di Kp trasferirà sulle variabili di controllo variazioni
contenute anche in presenza di errori rilevanti
Aumenta la banda passante (sistema più pronto)
Aumenta la precisione a regime per sistemi di tipo 0
Regolatori PID
Azione integrale
Tiene conto della storia dell’andamento avuto dall’errore in passato
Introduce un polo nell’origine
L’errore a regime per ingresso a gradino diventa nullo
Aumenta il ritardo della catena diretta di controllo e determina una
riduzione dei margini di fase ed ampiezza del sistema retroazionato
Se il sistema è di tipo 1 l’azione integrale non deve essere utilizzata
Regolatori PID
3
Azione derivativa
Varia linearmente con la derivata dell’errore
Azione anticipatrice, migliora i margini di stabilità
Amplifica i segnali con contenuto armonico a frequenze elevate (può
amplificare il rumore)
Realizzazione fisica diversa dalla realizzazione teorica (zero
nell’origine):
Ks
ed= 1+s Kd /N
e d= K ds
d
Una variazione a gradino del riferimento genera una componente
impulsiva sulla componente derivata.
Si può filtrare il set-point o derivare solamente la variabile di processo
al posto dell’errore
Regolatori PID
Algoritmo PID
Esempi in simulink
Regolatori PID
4
Anti wind-up
Per limitare l’ampiezza delle variabili di controllo e per non portare
l’organo di comando a lavorare in condizioni limite si utilizza un
blocco non lineare (saturatore) a valle dell’algoritmo PID (la
saturazione è spesso legato ai limiti fisici degli attuatori)
Il saturatore restituisce il valore di ingresso se compreso tra i limiti
ammissibili; altrimenti restituisce il valore limite superato
La combinazione di saturazione e azione integrale può causare un
inconveniente noto come carica integrale (windup)
Regolatori PID
Anti wind-up
Il windup può provoca aumento delle sovraelongazioni e allungamento
dei tempi di assestamento. (Quando l’errore cambia segno, l’azione
integrale è elevata e richiede tempo per scaricarsi)
Tecniche anti windup (o desaturazione) limitano il contributo integrale
quando l’attuatore è in saturazione
Esempio in simulink
Regolatori PID
5
Passaggio controllo manuale/automatico
I regolatori industriali devono poter funzionare anche in modo
“manuale” (la variabile di controllo viene modulata manualmente
dall’operatore umano)
Le commutazioni automatico/manuale non devono causare effetti sugli
attuatori
Algoritmi bumpless switching
Regolatori PID
Metodi di taratura automatica
La taratura dei guadagni del PID viene effettuata
ricorrendo a metodologie empiriche
Le metodologie più diffuse sono i metodi empirici di
Ziegler-Nichols:
ad anello aperto
ad anello chiuso
Regolatori PID
6
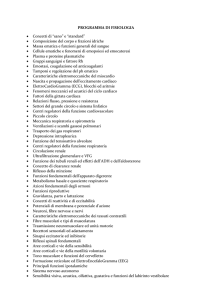
Metodi di taratura automatica
Metodo di Ziegler-Nichols ad anello aperto
K e-sL
P(s)=
1+sτ
Algoritmo Kp
Ki
Kd
P
τ/(KL)
PI
.9τ/(KL)
Kp/(3.3L)
PID
1.2τ/(KL)
Kp/(2L)
L
KpL/2
τ
Regolatori PID
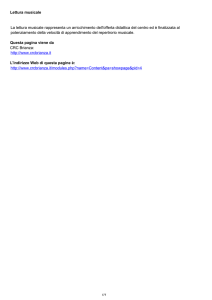
Metodi di taratura automatica
Metodo di Ziegler-Nichols ad anello chiuso
yd
e
Kp
u
P(s)
y
τ0
K0 è il valore di Kp
che porta il sistema al
limite di instabilità
Algoritmo Kp
Ki
P
.5 K0
PI
.4 K0
Kp /(.8 τ0)
PID
.6 K0
Kp /(.5 τ0)
Kd
.125 τ0 Kp
Regolatori PID
7
Discretizzazione ed implementazione digitale
Per implementare un algoritmo PID con un dispositivo
digitale è necessario approssimare numericamente le azioni
integrale e derivativa
Le componenti proporzionale - integrale - derivativa
all’istante tk posso essere approssimate come:
Ts = Passo di
campionamento
Regolatori PID
8