ROBOT CALCIATORE VIPER III
IIS Cobianchi ed Elettra Robotics Lab
DATI GENRALI
Docente referente: Prof. Raimondo Sgrò
Team di sviluppo:
Filippo Marcodini (ERL)
Christian Conti (ERL studente UniTo)
Matteo Bellorini (Cobianchi 5 Elettronica)
Federico Cantoreggi (Cobianchi 5 Elettronica)
Alessandro Micheloni (Cobianchi 5 Elettronica)
Lorenzo DeGaspari (Cobianchi 4A Informatica)
Luca Dal Molin (Cobianchi 4A Informatica)
Altri collaboratori: Alberto Mazzaccaro (ERL), Andrea Greco (ERL).
Istituto Cobianchi: Istituto di Istruzione Superiore con sede a Verbania, con numerosi
indirizzi e specializzazioni, fondato nel 1886.
www.cobianchi.it
Elettra Robotics Lab nasce da un gruppo di docenti ed ex alunni che hanno operato per
anni nel settore della robotica educativa, partecipando a numerose edizioni nazionali ed
internazionali della competizioni robocup. In questo gruppo di lavoro vi sono i ragazzi che
nel 2013 hanno ottenuto il titolo di campione del mondo nel superteam del soccer open
junor.
www.elettraroboticlab.it
ERL e Cobianchi hanno sviluppato una collaborazione, per la robotica educativa.
APPLICAZIONI
Il robot ViperIII non trova direttamente applicazione in ambito industriale, ma possono
essere applicate diverse sue parti o tecnologie.
Il movimento omnidirezionale, realizzato mediante 4 motori cono correzione con sensore
magnetico, potrebbe essere impiegato per dei movimenta tori di carico, oppure per piccoli
robot magazzinieri, potersi muovere senza dover riorientare il robot, potrebbe consentire
più facilmente l’accesso agli scaffali.
Analogamente, il sistema di mappatura mediante ultrasuoni, potrebbe trovare impiego
anche nei robot automatici di pulizia.
Il protocollo I2C può essere impiegato per gestire reti di sensori, mediante scheda
centralizzata.
Il sistema di diagnostica mediante Blue Tooth può essere implementato su qualsiasi
macchina industriale.
Il sistema di calcio elettromagnetico, è ottenuto grazie ad un convertitore DC/DC 12/80V
che può essere impiegato in diverse applicazioni.
DESCRIZIONE
Viper III è derivato dai precedenti Viper 1 e Viper 2, calciatori gemelli che si sono
classificati al primo posto alla Romecup 2016 nella categoria Soccer Open. Oltre alla
vittoria alla Romecup, i robot Viper hanno partecipato all’europeo di Eindhoven
classificandosi al quinto posto, ed hanno partecipato al mondiale Robocup Junior 2016 di
Lipsia ottenendo la vittoria nella categoria Superteam ed il terzo posto nell’individuale
(Team MegaHertz).
Viper III è un robot calciatore nato per le competizioni della Robocup Junior Under 19,
categoria Open League (fino a 2,4kg). Nasce dall’esperienza maturata dagli ideatori
all’interno di queste competizioni.
Il robot è in grado compiere movimento omnidirezionale, la sua trazione è basata su 4
ruote motrici con relative ruote omnidirezionali, il cui movimento è opportunamente
combinato e gestito dall’unità di controllo.
Rispetto ai precedenti, Viper III presenta vari miglioramenti Hardware e sofware.
Il robot è quindi in grado ci compiere le seguenti azioni:
- rilevare la posizione della palla (questa emette infrarossi modulati a 40kHz)
- rilevare l’orientamento grazie ad una bussola elettronica
- rilevare la distanza dalle pareti
- rilevare le linee bianche che delimitano il campo
- rilevare il possesso palla
- catturare la palla con il rullo di cattura
- calciare la palla verso la porta avversaria, grazie ad uno stantuffo elettromagnetico.
- comunicare con il compagno di squadra tramite modulo Blue Thoot
- elaborare le immagini per vedere una pallina arancione
Il telaio del robot è composto da tre dischi di policarbonato e relative colonnine. Sul piano
inferiore troviamo gli attuatori di movimento e del calcio, troviamo inoltre i sensori di linea.
Al piano intermedio la scheda di riconoscimento della palla, il circuito boost per il calcio ed
il rullo di cattura. Al piano superiore troviamo la scheda madre, la scheda di gestione della
linea, i sensori di ultrasuono, la bussola ed i sensori di prossimità.
Tutte le schede di gestione del robot sono auto costruite, ad eccezione dei sensori ad
ultrasuono e bussola, che sono sensori commerciali.
La scheda madre è interamente auto costruita ed è basata sul microcontrollore ad 8 bit
PIC 18F66k80, superiore al precedente 18F4525. Oltre all’upgrade del processore, la
scheda integra diverse periferiche, in modo da minimizzare il cablaggio, in particolare i
driver per i motori, il driver per il dribler, un processore ausiliario per il display e la gestione
delle linee di campo ed altro.
Il software della MBè scritto in linguaggio C, quello delle periferiche in assembly.
Punto focale del robot è il riconoscimento della palla, cosa che avviene grazie ad
un’apposita scheda, anche questa auto costruita, che gestisce 16 sensori in grado di
decodificare gli impulsi IR della palla. La scheda è gestita da un altro processore 18F4321
che trasmette le informazioni di direzione e distanza via bus I2C. La scheda provvede dei
led di debug che indicano i visivamente sensori attivi. Il firmware è scritto in assembly.
Per il calcio elettromagnetico è stato usato un circuito Dc/DC di tipo Step Up a pompa di
carica, in grado di elevare la tensione sino a 100V, e di scaricare adeguata carica sul
solenoide, al momento del calcio.
Per la gestione della linea il processore ausiliario gestisce 4 sensori IR a riflessione,
analogici. Si tratta di un PIC16F876, il firmware è scritto in assembly. È possibile effettuare
una taratura della linea attraverso delle letture iniziali delle condizioni del campo.
A bordo sono presenti due alimentazioni distinte:
Logica di controllo 7,4V Lipo (la scheda madre provvede a fornire i 5V alle periferiche)
Potenza 11,1V Lipo.
Di seguito alcune immagini tratte dal visualizzatore 3D del software di Cad Elettronico
KiCad, riguardanti alcune schede del robot:
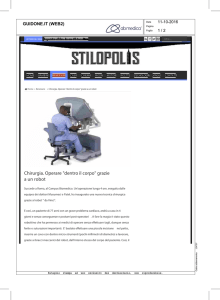
Figura 1: Scheda madre immagina CAD
Figura 2: Scheda madre
Figura 3: Scheda di rilevazione della palla
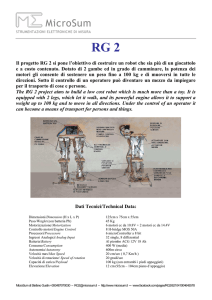
Figura 4: Scheda del sistema di calcio elettromagnetico CAD
Figura 5: Scheda del sistema di calcio elettromagnetico
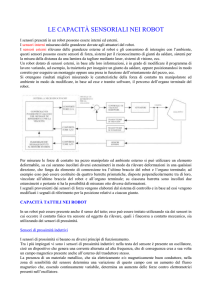
Figura 6: Telaio con 4 motori e ruote omnidirezionali. Le ruote sono state disegnate e stampate in
3D
Di seguito una breve raccolta di schemi elettrici del robot:
Figura 7: Schema elettrico della scheda madre del robot. A bordo lo stabilizzatore, alcuni controlli
ed i ponti driver per i 4 motori, il processore ausiliario ed altro.
Figura 8: Schema elettrico della scheda di rilevazione della palla
Figura 9: Schema elettrico della scheda del boost per il calcio elettromagnetico
Di seguito una breve galleria fotografica.
Dettaglio delle ruote omnidirezionali
ViperIII con i predecessor1 Viper 2 e Viper 1 ed i premi del mondiale RoboCup Junior 2016
Il Team MegaHertz al mondiale RoboCup Junior 2016
Cos’è la Robocup: organizzazione internazionale nata con lo l’obiettivo di effettuare una
partita di calcio tra robot ed umani, entro la data obiettivo del 2050. Si articola in Major e
Junior, a loro volta divise in varie categorie. Una di queste è proprio il soccer, presente sia
nella Major che nella Junior, chiaramente con regolamenti diversi.