caricato da
common.user15819
Interferometro di Shearing Radiale: Tesi di Laurea in Fisica

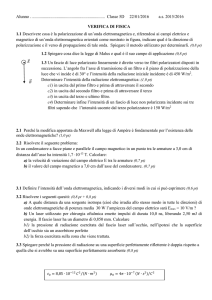
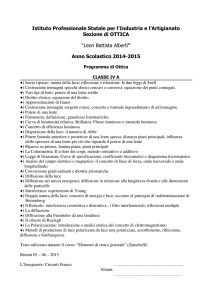
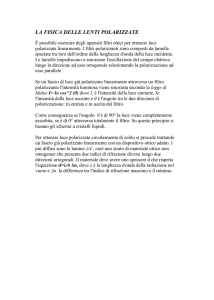
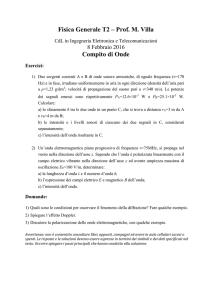
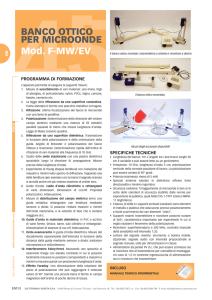
Università degli Studi di Napoli “Federico II” Scuola Politecnica e delle Scienze di Base Area Didattica di Scienze Matematiche Fisiche e Naturali Dipartimento di Fisica “Ettore Pancini” Laurea triennale in Fisica Interferometro di shearing radiale basato sulla fase di Pancharatnam-Berry Relatori: Candidato: Prof. Enrico Santamato Prof. Bruno Piccirillo Maria Francesca Abbate Matricola N85000876 A.A. 2017/2018 Indice 1 Interferometria 1.1 Esempi di interferometri . . . . . . . . . . . . . . . . . . . . . 1.2 Esempi di interferometri di shearing . . . . . . . . . . . . . . 1.2.1 Interferometri di shearing basati sulle wedge plate . . 1.2.2 Interferometro di shearing basato su cristallo . . . . . 1.2.3 Interferometri di shearing a cristalli liquidi . . . . . . 1.2.4 Interferometri di shearing basati sulla fase geometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 6 7 8 9 11 12 2 Fase di Pancharatnam-Berry e GPLs 2.1 Fase di Pancharatnam-Berry . . . . . . . . . . . . . 2.1.1 Sfera di Poincarè e parametri di Stokes . . . 2.2 GPLs . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.1 Ottica dei cristalli liquidi e lamine di ritardo 2.2.2 Funzionamento di una GPLs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 14 17 20 20 22 . . . . . . . . . . . . . . . . . . . . . . . . . 3 Interferometro di shearing: realizzazione e risultati 26 3.1 Apparato sperimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 3.2 Esempio di misura e risultati . . . . . . . . . . . . . . . . . . . . . . . . 28 A Teorema adiabatico 33 Bibliografia 35 2 Introduzione Per misure di superficie ad alta precisione, il metodo più utilizzato è l’interferometria, in quanto permette di ottenere informazioni sulla fase del campo ricostruendo quindi il fronte d’onda uscente dalla superficie da analizzare e conseguentemente la superficie stessa. Negli interferometri più comuni, l’interferenza è data da due fasci: uno passante per la superficie da analizzare, contenente l’informazione da rivelare, e l’altro passante per una superficie di riferimento nota di buona qualità. Ciò comporta oltre alla necessità di disporre di una buona superficie di riferimento anche un’alta sensibilità alle vibrazioni e disallineamenti. L’interferometria di shearing supera questi problemi in quanto i due fasci che andranno ad interferire sono generati come copia di un unico fascio che attraversa la sola superficie da analizzare. Negli interferometri di shearing vi è in generale uno o più componenti il cui ruolo è quello di generare lo shear, descritto tramite i parametri di shearing: la distanza di shear, (SD shearing distance) ovvero di quanto i due fasci risultano spostati e la differenza di fase tra i due fasci (SP shearing phase). Gli interferometri di shearing implementati fino ad oggi, presentano però alcuni difetti: in generale è molto difficile separare i parametri SD e SP, e ancor di più variarli in modo indipendente, al fine di ottenere la combinazione migliore che porti alla figura di interferenza desiderata. Inoltre risultano essere poco versatili (i gradi di libertà su cui fare la misura restano fissati ad es. un interferometro di shearing laterale potrà rivelare la derivata del campo solo lineare) e in generale molto ingombranti (realizzati con numerosi componenti ottici) o quelli poco ingombranti risultano essere molto costosi (ad es. realizzato con un unico componente di cristallo). Un innovativo interferometro di shearing è quello basato su componenti ottici a fase geometrica (o di Panchartnam-Berry), che oltrepassa queste difficoltà. Il generatore di shear è costituito da una coppia di PBOE (componente ottico basato sulla fase di Panchartnam-Berry, lamine di ritardo con asse ottico che varia nel piano trasverso): il principale vantaggio nel loro utilizzo è quello di poter regolare indipendentemente i parametri di shear semplicemente variando la loro distanza; oltre ad essere poco ingombrante (lenti sottili a cristalli liquidi), è anche molto versatile, difatti è possibile utilizzarlo come derivatore lineare, radiale o azimutale cambiando la lente a fase geometrica utilizzata, (rispettivamente Λ-plate, GPLs, q-plate). Inoltre essendo basato su lenti a cristalli liquidi è possibile controllarne il funzionamento (attivare o disattivare lo shearing) mediante un campo esterno. Questo lavoro di tesi si propone di descrivere il funzionamento di un interferometro di shearing radiale basato sulla fase geometrica, che utilizza come generatore di shear delle GPLs (lenti sferiche a fase geometrica con asse ottico che varia quadraticamente nel piano trasverso). La lente si comporta come lente convergente o divergente a seconda della polarizzazione in ingresso, in questo modo un fascio in ingresso risulta 3 INDICE 4 duplicato in uscita, una parte espansa ed una contratta. La differenza tra i due fasci (SE shearing expasion) può essere regolata variando la distanza tra le due lenti. Un’altra caratteristica innovativa è che è possibile strutturare il fronte d’onda del fascio in uscita in quanto, essendo geometrica l’unica differenza di fase ottenuta tra i vari punti del campo nel piano trasverso, essa sarà dipendente solo dalla disposizione dell’asse ottico delle lenti nel piano trasverso. Nel primo capitolo verranno presentati alcuni tipi di interferometri di shearing implementati fin’ora; nel secondo verrà illustrato il funzionamento delle GPLs, componente principale dell’interferometro di shearing radiale oggetto di questa tesi; nel terzo si mostrerà il funzionamento dell’interferometro e la sua realizzazione sperimentale, utilizzando come oggetto da analizzare una lente cilindrica simulata con un SLM (modulatore spaziale di luce). Capitolo 1 Interferometria Misurare la fase di un’onda elettromagnetica può avere numerose applicazioni. Ad esempio, misurare la forma della superficie di un componente ottico, come una lente o uno specchio; ottenere informazioni sulla microstruttura di una superficie, tramite misure di superfici ruvide o ancora misure di metrologia ottica, ovvero misure che permettono di trovare proprietà di un materiale, come l’omogeneità o aberrazioni presenti in un componente ottico. Tra le varie tecniche utilizzate per misure di superfici l’interferometria presenta numerosi vantaggi. Ha un’alta sensibilità (dell’ordine dei nanometri) per la topografia delle superfici. Inoltre non richiede contatti meccanici con la superficie in esame, di conseguenza non ci sono rischi di danneggiare o deformare la superficie, come può alle volte succedere con altri metodi come test plate o sonde a contatto. Un interferometro è uno strumento che, in generale, compara la posizione o la struttura superficiale di due oggetti. I componenti di un interferometro di base a divisione di fascio (distinti da quelli a divisione di fronte d’onda) consistono in una sorgente di luce, un beamsplitter, una superficie di riferimento, una superficie da analizzare (test) e uno schermo o una telecamera dove raccogliere le frange di interferenza. Il beamsplitter genera i fasci da inviare sulla superficie test e quella di riferimento da una singola sorgente in modo da garantire la mutua coerenza. Quando i due fasci si ricombinano l’intensità osservata varia a seconda dell’ampiezza e della fase di essi. Assumendo i due fasci di uguale intensità e perfettamente in fase nel punto in cui sono ricombinati l’intensità risultante è quattro volte l’intensità del singolo fascio. Questo fenomeno è noto come interferenza costruttiva. L’interferenza distruttiva avviene invece quando i due fasci sono esattamente opposti in fase: i due fasci si eliminano a vicenda e l’intensità risultante è zero. Se i due fasci si estendono spazialmente, si possono osservare le variazioni su uno schermo nella fase relativa tra i fronti d’onda. Si vedranno dunque delle frange di interferenza, regioni alternate di interferenza costruttiva e distruttiva. In generale le differenze di fase tra i due fronti d’onda sono generate dal cammino ottico diverso dei due fasci. Analizzando il pattern di interferenza, è possibile determinare le differenze di cammino ottico in ogni punto del campo visivo dello strumento. Le differenze di fase sono causate dal fatto che la superficie test e quella di riferimento non hanno esattamente la stessa forma e pendenza; generalmente la superficie di riferimento è scelta in modo tale da presentare meno aberrazioni possibili, cosı̀ il pattern risultante delle frange indicherà le imperfezioni della superficie in esame. (Fig1.1) 5 CAPITOLO 1. INTERFEROMETRIA 6 Figura 1.1: Interferometro 1.1 Esempi di interferometri Ci sono molti tipi di interferometri, che si differenziano per l’assetto e per la natura dei componenti ottici utilizzati. Per misurare la forma di una superficie o la qualità di un fronte d’onda trasmesso da un’unica superficie o un intero sistema ottico sono spesso utilizzati gli interferometri di Fizeau o Twyman Green. Per quanto riguarda gli interferometri di Fizeau (Fig. 1.2), la superficie di riferimento è incorporata insieme al beamsplitter in un unico componente noto come elemento di trasmissione. Le frange sono ben visibili anche con una grande differenza di cammino ottico grazie alla alta coerenza del laser, permettendo di posizionare la superficie da analizzare in qualsiasi posto conveniente del fascio test. L’interferometro Twyman-Green, invece, inventato Figura 1.2: Interferometro Fizeau e brevettato nel 1916, è mostrato in fig. 1.3 . La sorgente di luce per un TwymanGreen è una sorgente puntiforme quasi monocromatica che viene collimata da una lente in un’onda piana. Questa onda piana è divisa in un fascio di riferimento e un fascio di prova da un beamsplitter. L’utilizzo principale è testare delle lenti, nel qual caso il fascio di riferimento si riflette su un piano di riferimento noto mentre il fascio di prova si riflette sulla superficie di prova e entrambi ritornano al beamsplitter. I fasci vengono cosı̀ divisi una seconda volta, creando due interferogrammi complementari. Uno è proiettato verso la sorgente puntiforme, mentre l’interferogramma da analizzare è trasmesso da una lente di imaging (L2 ) al piano di osservazione. CAPITOLO 1. INTERFEROMETRIA 7 Figura 1.3: Interferometro Twyman-Green 1.2 Esempi di interferometri di shearing L’interferometria si è evoluta dal semplice strumento che produce immagini statiche di un pattern di frange a sistemi computerizzati che digitalizzano e analizzano i pattern con sofisticati strumenti di misure di fase. Catturando diversi fotogrammi di dati di intensità quando la spaziatura tra la superficie di riferimento e di test viene modulata, gli interferometri a sfasamento (PSI) calcolano la fase in ogni punto della superficie, consentendo un’analisi dei dati più accurata e una risoluzione più elevata della misura. Interferometri convenzionali come quello di Fizeau e Twyman-Green sono stati largamente utilizzati per misure di superficie ad alta precisione. Come già accennato però questo tipo di interferometri richiede una superficie di riferimento molto precisa e anche rigide condizioni ambientali, di conseguenza il range di misure è limitato. Gli interferometri di shearing invece hanno buona resistenza alle vibrazioni e, principale caratteristica, non necessitano di una superficie di riferimento in quanto l’interferenza è data da due repliche dello stesso fronte d’onda che sono separate lateralmente (shearing laterale) o ridimensionate differentemente (shearing radiale) o mutualmente ruotate (shearing azimutale). La differenza di cammino ottico (optical path difference OPD) è collegata direttamente al gradiente del fronte d’onda in esame e non al fronte d’onda stesso; in questo modo il range di misure è tipicamente maggiore di quello degli interferometri convenzionali. L’interpretazione dell’interferogramma dipende non solo dal tipo di shearing ma anche dai parametri che lo caratterizzano ovvero la distanza di shear (shear distance SD) e la differenza di fase acquisita tra le due repliche (shear phase, SP). Nei tradizionali strumenti basati sulla rifrazione e riflessione di Snell, i parametri SD e SP sono collegati ed è difficile controllarli separatamente, (nell’interferometro di shearing basato su componenti ottici a fase geometrica questo controllo separato è ottenuto naturalmente in quanto le due repliche sono polarizzate ortogonalmente). Inoltre le applicazioni non si limitano solo a misure di metrologia infatti includono misure di superfici, verifiche di collimazione di un fascio laser, analisi di si- CAPITOLO 1. INTERFEROMETRIA 8 stemi ottici, misure di flusso di campo, misure di distanza, analisi di materiali, misure di espansione termica lineare ecc. Per tali vantaggi, sono stati sviluppati numerosi tipi di interferometri di shearing. Generalmente gli interferometri di shearing utilizzano come componente ottico per sdoppiare il fascio (generare lo shear) prismi wedge, lamine parallele, prismi quadrati, grating pair ecc., e possono essere formati da un singolo elemento o da numerosi componenti ottici separati. Di solito è più facile controllare separatamente la distanza e la fase di shearing in quelli che utilizzano più componenti, ma avere un unico elemento è conveniente per la stabilità del cammino ottico comune, per la robustezza e per la compatezza. Per ottenere misure ad alta precisione, l’ideale sarebbe combinare le caratteristiche di entrambi i tipi di generatori di shear. Gli interferometri basati su prismi di wedge hanno il vantaggio di essere economici e di avere quasi sempre un singolo elemento ma il cammino ottico comune preclude la possibilità di implementare lo shearing di fase quando ciò è necessario per misure di superfici ad alta precisione. Di seguito verranno presentati brevemente alcuni tipi di interferometri di shearing implementati fino ad ora, e infine quelli basati sulla fase di Pancharatnam-Berry (o fase geometrica) oggetto di questa tesi. 1.2.1 Interferometri di shearing basati sulle wedge plate Tra gli interferometri di shearing, i più largamente utilizzati per misure di metrologia ottica, sono quelli basati sulle wedge plate.[2] Le due principali tecniche di analisi degli interferogrammi sono la tecnica phase-shifting (PSI) e di analisi spaziale. Nella PSI, si fa variare la fase di un fronte d’onda in modo noto, registrando una serie di interferogrammi in sequenza, e poi, con un semplice algoritmo si può punto per punto ricostruire il fronte d’onda. Le tecniche di analisi spaziale invece forniscono informazioni sulla fase utilizzando un singolo interferogramma, e una successiva analisi di Fourier numerica. Questo metodo presenta alcuni svantaggi: l’analisi dell’interferogramma richiede una grande complessità computazionale e non può essere utilizzata per campioni con discontinuità o picchi molto stretti. Nell’interferometria con wedge plate, si preferisce però l’uso dell’analisi di Fourier rispetto al PSI poiché le tecniche basate su shifting di fase sono relativamente difficili da attuare nell’ interferometria di shearing basata sulle wedge plate, a causa del cammino ottico comune. Infatti per implementare la PSI negli interferometri di shearing in passato sono stati proposti esperimenti dai complicati assetti o realizzato con numerosi componenti. Ad esempio per misurare lo shifting di fase in questo tipo di interferometri Lee et al. utilizzarono una geometria comprendente due paia di wedge plate e un beamsplitter: le wedge plate servivano sia per introdurre la distanza di shear che lo shifting di fase; richiedendo però numerosi componenti risultando cosı̀ ingombrante e difficile da realizzare. Song et al. implementarono invece uno shifting di fase in un interferometro di shearing basato sulle wedge plate muovendo le wedge plate nel piano parallelo alla direzione di wedge. In questa tecnica però, essendo la quantità di shift di fase direttamente proporzionale all’angolo di wedge, il rischio di commettere errori è molto alto in quanto molto sensibile alla corretta posizione della wedge plate. Mihaylova et al. realizzarono lo shift variando la separazione tra due lamine di vetro parzialmente riflettenti. Invece Xu et al. proposero un interferometro di shearing basato sulle wedge plate, utilizzando come assetto di base un interferometro tipo Mach-Zehnder. Per introdurre lo shear nella direzione x e y introdussero due wedge plate in due bracci e muovendo le plate ottenevano uno shift di fase. In tutti questi metodi l’interferogramma è generato da movimenti meccanici dei componenti che richiedono movimenti ad alta precisione, e ciò può portare a numerosi CAPITOLO 1. INTERFEROMETRIA 9 inconvenienti, come errori di posizionamento o di rinculo. Un altro interferometro di shearing che sfrutta le wedge plate fu proposto da Disawal et al. , introducendo lo shifting di fase tramite un grating sinusoidale, eliminando il problema del movimento delle wedge plate.(Fig. 1.4) Figura 1.4: Interferometro di shearing con wedge plate e grating sinusoidale 1.2.2 Interferometro di shearing basato su cristallo Questo tipo di interferometro è stato implementato nel 2009 a cura di Liu et al.[5] Si tratta di un generatore di shear basato su una singola lamina di cristallo birifrangente, ed è utilizzato come shearing laterale. Presenta tre principali caratteristiche: è formato da un singolo componente ottico, quindi è molto stabile ed è facile realizzare l’interferenza a cammino ottico comune; si può modificare la distanza di shear cambiando l’angolo di incidenza del fronte d’onda da analizzare; si possono eguagliare le intensità dei due fasci in modo tale da avere visibilità delle frange massima. L’interferometro è schematizzato in figura 1.5. Un fascio laser generato da una sorgente polarizzata linearmente attraversa una lamina di ritardo a λ2 H1 , un polarizzatore P1 , e un filtro spaziale con un obiettivo di un microscopio, ne esce di conseguenza un’onda sferica polarizzata che entra in un polarizzatore beamsplitter PBS. Nel PBS uno dei componenti la cui direzione di polarizzazione è verticale nel piano yz passa direttamente attraverso il piano del beamsplitter e successivamente in una lamina a λ4 Q1 che si trova a 45◦ rispetto all’asse z nel piano xz. Dopo aver attraversato la lamina Q1 ne esce un’onda sferica polarizzata circolarmente e il fronte d’onda da sferico diventa piano dopo aver attraversato una lente L1 . L’onda piana incide sulla superficie da analizzare, viene riflessa e la forma del nuovo fronte d’onda rappresenta due volte l’aberrazione presente sull’oggetto in esame. L’onda piana polarizzata circolarmente ripercorre il cammino passando per L1 e Q1 , diventando un’onda sferica polarizzata linearmente con direzione parallela al piano yz. L’onda viene inoltre riflessa dal beamsplitter ritornando alla polarizzazione circolare dopo aver attraversato Q1 , che si trova a 45◦ rispetto all’asse x nel piano xy, passa dunque attraverso la lente L2 , trasportando le stesse informazioni sulle aberrazioni della superficie. L’onda incide sulla calcite (generatore di shear) e CAPITOLO 1. INTERFEROMETRIA 10 Figura 1.5: Interferometro di shearing basato su cristallo di calcite si divide in due onde polarizzate linearmente ortogonalmente di uguale intensità, una parallela all’asse y, l’altra all’asse x. All’uscita del cristallo le due onde avranno direzione di propagazione parallela, uguale intensità e le stesse informazioni di aberrazione sulla superficie, con un piccolo sfasamento nella direzione y. Infine passano attraverso la lamina λ4 Q3 posta a 45◦ dall’asse y nel piano xy e attraverso un polarizzatore P2 riottenendo la stessa direzione di polarizzazione, in modo tale da poter visualizzare una figura di interferenza. Sul sensore CCD il pattern di interferenza corrisponde allo shearing nella direzione y. Analogamente dopo aver ruotato il generatore di shear di π2 lungo la direzione di propagazione dell’onda, si potrà ottenere il pattern dell’interferenza corrispondere allo shearing nella direzione dell’asse x. In questa configurazione P1 e H1 servono per modulare l’intensità. Fissato P1 , quando H1 è ruotato (cambia l’angolo che forma con il piano della direzione di polarizzazione della sorgente) l’intensità del fascio laser che passa attraverso P1 ed entra nel sistema di interferenza può essere regolata per corrispondere a diversi indici di rifrazione della superficie in esame. L1 e L2 costituiscono un compressore di fasci, grazie al quale l’onda riflessa dalla superficie test è trasformata in un’onda con l’apertura adatta alla dimensione del sensore CCD e la stessa informazione sull’aberrazione della superficie. Q3 e P2 costituiscono un polarizzatore phase-shifting per shifting di fase a più step, quando P2 è ruotato in modo da cambiare la direzione di polarizzazione di un certo angolo α, viene introdotta nella fase di interferenza uno shift di 2 α. Grazie a questo interferometro due pattern diversi di interferenza corrispondenti allo shear sull’asse y e sull’asse x possono essere analizzati tramite un computer. Infine la descrizione del fronte d’onda e quindi l’aberrazione sulla superficie test è ottenuta utilizzando un algoritmo per ricostruire il fronte d’onda stesso. Presenta però lo svantaggio di avere un difficile controllo sulla modifica dei parametri di shear, oltre che un costo molto elevato del componente principale, essendo necessario un cristallo di notevole lunghezza e qualità ottica. (Fig 1.6) CAPITOLO 1. INTERFEROMETRIA 11 Figura 1.6: Cristallo di calcite 1.2.3 Interferometri di shearing a cristalli liquidi Nel 2001 Griffin propose l’uso di una lamina di ritardo a cristalli liquidi come generatore di shear. Il ritardo di fase tra i due fronti d’onda veniva introdotto dall’applicazione di un segnale esterno. Nel 2013 Mehta et al.[4] estesero il lavoro di Griffin verso la realizzazione di un profilo 3D utilizzando i cristalli liquidi.(Fig. 1.7) Lo shifting di fase dell’interferogramma è proiettato su un obiettivo e la distorsione delle frange è registrata sul sensore CCD, dall’analisi delle frange si può risalire alla forma dell’oggetto da testare. Figura 1.7: Interferometro di shearing a cristalli liquidi CAPITOLO 1. INTERFEROMETRIA 1.2.4 12 Interferometri di shearing basati sulla fase geometrica Come si è visto in precedenza la maggior parte degli interferometri di shearing richiede numerosi componenti ottici e tende ad essere ingombrante oppure, se sono basati su un singolo componente ottico, è difficile implementare lo shifting di fase e dunque ottenere l’immagine da ricostruire. Nel 2018 è stato implementato da Piccirillo et al.[6] un interferometro di shearing che utilizza componenti ottici basati sulla fase geometrica. Questo strumento oltre ad essere molto compatto risulta essere anche molto versatile: a seconda della lente a fase geometrica utilizzata (sferica, d-plate o q-plate) lo si può utilizzare come derivatore radiale, laterale o azimutale. Il fronte d’onda in esame è separato in due fasci polarizzati ortogonalmente e la fase geometrica è introdotta da una lamina di ritardo a cristalli liquidi con una distribuzione spaziale dell’asse ottico non uniforme, ovvero una SVAP (spatially varying axis birifrangent plate), della quale ne si parlerà nel prossimo capitolo. Di seguito è descritto un esempio di interferometro di shearing laterale e radiale basato sulla fase geometrica. Interferometro di shearing laterale basato sulla fase geometrica In figura è presentato lo schema dell’interferometro di shearing laterale. Un fascio polarizzato linearmente, (visto come somma di due fasci polarizzati circolarmente con polarizzazione ortogonale) incide su una SVAP. Conseguentemente acquisisce un fattore di fase geometrica pari a ei2Q(x,y) , la cui dipendenza da x e y dipende dal pattern dell’asse ottico della SVAP e il segno di Q(x, y) dipende dal tipo di polarizzazione circolare in input (sinistrorsa o destrorsa). Inoltre, essedo una lamina a λ2 le polarizzazioni usciranno ortogonali a quelle in input. Il componente principale dell’interferometro di shearing a fase geometrica consiste in due SVAP separate da una distanza d, che introducono lo shear tra i due fasci in modo da poter essere controllato. Nella parte della figura 1.8 in basso a destra si può vedere la distribuzione dell’asse veloce della SVAP, che in questo caso lineare sarà una Λ plate. In questo dispositivo, l’asse veloce ruota nel piano trasverso lungo la direzione x, la rotazione dell’angolo Q cresce (o decresce) linearmente con x da 0 a π lungo una distanza Λ rappresentante il periodo spaziale della plate. Di conseguenza la plate deflette un fascio di angolo arctan Λλ e quello polarizzato ortogonalmente di angolo −arctan Λλ dove λ è la lunghezza d’onda. A una certa distanza z dalla plate, questa deflessione causerà uno shear laterale di ± zλ Λ rispetto alla direzione di propagazione. L’azione della seconda plate posta ad una distanza z = d è quella di rimuovere il fattore di deflessione ponendo uno shear costante pari a SD = 2dλ Λ , in questo modo si può controllare la SD variando il parametro d. In seguito è posto un analizzatore in modo tale da permettere l’interferenza tra le due polarizzazioni ortogonali. L’intensità misurata sul detector sarà una funzione della differenza di angolo ψ tra la polarizzazione lineare in input e l’asse dell’analizzatore: I(ψ) = |S|2 cos2 ψ + |D|2 sen2 ψ + Im(SD∗ )sen2ψ (1.1) dove S = E+ + E− e D = E+ − E− . Regolando l’asse dell’analizzatore ψ = π2 si può ottenere un’intensità pari alla radice della derivata rispetto ad x del campo. Interferometro di shearing radiale Rimpiazzando le Λ-plate dell’esempio precedente con due lenti a fase geometrica sferiche (GPLs), l’interferometro di shearing a fase geometrica esegue lo shear radiale, risultante CAPITOLO 1. INTERFEROMETRIA 13 Figura 1.8: Interferometro di shearing laterale dall’interferenza in due repliche del fascio test, ridimensionate (Fig1.9). In questo caso infatti la distanza di shear (SD) è sostituita dall’espansione di shear (SE) tra le due repliche. La GPLs (par.2.2) agisce come lente positiva o negativa a seconda se la polarizzazione in input è circolare destra o sinistra. Una coppia di due identiche GPLs perfettamente sovrapposte compensa il cambiamento di curvatura che ogni lente introduce nel fronte d’onda del fascio, all’aumentare della distanza a cui si pongono le lenti si avrà invece una differenza tra i due fasci, in dimensione e raggio di curvatura, sempre maggiore. Quando la distanza tra le due GPLs è molto minore della lunghezza focale delle lenti, si può mostrare che per un fascio gaussiano di raggio a e12 ”w”, SE = fzw Nelle stesse condizioni, introducendo una lamina di ritardo a λ4 (QWP) prima dell’analizzatore, l’interferometro può essere utilizzato per misurare una derivata ∂ radiale del tipo r ∂r EE ∗ del profilo trasverso dell’intensità del fascio Figura 1.9: Interferometro di shearing radiale Capitolo 2 Fase di Pancharatnam-Berry e GPLs Negli ultimi anni ci sono stati numerosi progressi nel campo della luce strutturata, ovvero luce con una complessa struttura spaziale, sia dal punto di vista della distribuzione di intensità sia di polarizzazione e fase. Ci sono numerosi componenti ottici che permettono di strutturare un fronte d’onda, a partire dalle semplici lenti rifrangenti alle complesse trasformazioni ottiche associate ai metamateriali, o ancora a componenti ottici che utilizzano la fase di Pancharatman-Berry. Per strutturare un fronte d’onda con le lenti rifrangenti si può sia agire modificando lo spessore della lente, in modo tale che diversi raggi compiano un cammino geometrico differente, sia agire sull’indice di rifrazione, come nei dispositivi GRIN, lenti a indice di rifrazione graduale; facendo acquisire in entrambi i casi un ritardo di fase al campo in uscita relativo al campo in ingresso. Dal momento che questa fase dipende dalla durata (nel tempo o nello spazio) del processo di propagazione ottica, essa è detta dinamica. Al contrario componenti ottici come i PBOE (Pancharman-Berry optical elements) permettono di strutturare il fronte d’onda modificando solo la fase geometrica (o di P-B), chiamata cosı̀ poichè non dipendente dalla propagazione dell’onda ma solo dalla geometria del cammino eseguito nello spazio delle polarizzazioni, ovvero descritto sulla sfera di Poincarrè. Infatti l’asse ottico pur rimanendo costante nel tempo come nei normali mezzi birifrangenti, non è uniforme nel piano trasverso al fascio, in modo tale che la polarizzazione della luce varia sulla sfera di Poincarè, seguendo cammini geometrici diversi a seconda della curva della lente nel piano trasverso lungo la quale si misura la polarizzazione locale. In particolare verranno descritte in questo lavoro di tesi le caratteristiche di una lente a fase geometrica sferica che si comporta da lente convergente per una delle due polarizzazioni circolari in input e divergente per l’altra. La lente è piana e spessa pochi micron, inoltre l’azione della lente può essere attivata o disattivata per mezzo di un campo esterno. 2.1 Fase di Pancharatnam-Berry Il teorema adiabatico attesta che per un sistema quantistico adiabatico, ovvero tale che la variazione dell’hamiltoniana nel tempo sia molto lenta, se all’istante iniziale ti il sistema si trova nell’n-esimo autostato, tale che l’autofunzione descrivente il sistema sia rappresentata da: ψ(ti ) = eiφn (ti ) ψn (ti ) all’istante finale tf l’autofunzione sarà 14 CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 15 ψn (tf ) = ψ(ti )eiφn (tf ) eiγn (tf ) = eiγn (tf ) ψn (ti )eiφn (ti ) eiφn (tf ) (Appendice A). In seguito all’evoluzione adiabatica dei parametri costruttivi, che definiscono una curva chiusa nello spazio delle fasi, il sistema, al tempo finale tf , ritorna nell’autostato n-esimo, quindi la sua energia non sarà variata, ma l’autofunzione corrispondente allo stato finale differirà da quella allo stato iniziale per un fattore di fase: dove Z t φn = − En (t0 ) dt0 (2.1) 0 e t Z γm (t) = i hψm (t0 )|ψ̇m (t0 )i dt0 (2.2) 0 Durante un’evoluzione di questo tipo, differentemente da un caso perturbativo, l’hamiltoniana subisce una trasformazione sostanziale, ma l’adiabaticità implica che essa avvenga molto lentamente. Per oltre mezzo secolo si è pensato che fosse sempre possibile eliminare la fase γ(t) tramite un’opportuna trasformazione di fase. In un articolo del 1984 Michael Berry mostrò che generalmente non è cosi quando si considerano trasformazioni cicliche (egli in realtà ne diede una generalizzazione più formale alla meccanica quantistica, in quanto la fase geometrica era già stata scoperta da Pancharatnam nel 1956 nell’ambito dell’ottica). La fase γ(t) calcolata per un’evoluzione ciclica risulta essere indipendente da ogni trasformazione di fase. Si può notare inoltre che risulta essere analoga a: Z t 0 0 0 Z r(t) hψm (t )|ψ̇m (t )i dt = i γm (t) = i 0 hψm (r)| 5r ψm (r)i dr (2.3) r(0) e per un’evoluzione ciclica: I hψm (r)| 5r ψm (r)i dr γm (t) = i (2.4) C che non è zero, in generale, poichè l’integrando non è un differenziale esatto nello spazio N-dimensionale dei parametri r. La fase (2.4) prende il nome di fase geometrica o anche fase di Berry. Il carattere geometrico di questa fase è manifesto in (2.4) che non dipende dal tempo o da qualunque altro parametro utilizzato per descrivere la curva C nello spazio dei parametri r, e dunque dai dettagli del moto, ma solo dalla geometria topologica dello spazio in cui questo moto avviene. Il fatto che questa fase non possa essere eliminata non implica che sia sempre presente. Esistono infatti casi in cui essa è semplicemente zero, ad esempio nel caso in cui la curva C è interna ad una regione semplicemente connessa e, quindi, può essere modificata con continuità fino a ridursi ad un punto senza uscire dalla regione. Al contrario la fase dinamica φ(t) (2.1) dipende dal tempo impiegato a percorrere il circuito. In ogni caso questi due contributi risultano essere spesso inscindibili; la GPLs che verrà presentata nei prossimi paragrafi invece introduce una fase all’onda uscente solo geometrica essendo una lente a cammino ottico comune (variazione di fase dinamica nulla). La fase di Berry non è altro che un esempio di olonomia associata al trasporto parallelo della fase definito dall’evoluzione adiabatica. Per comprendere il concetto di olonomia si può immaginare un vettore su una superficie sferica che viene trasportato parallelamente (ad esempio imponendo che non ruoti rispetto alla direzione radiale) lungo un percorso chiuso (Fig 2.1 ). CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 16 Figura 2.1: Un vettore trasportato parallelamente su una superficie sferica non ritorna generalmente parallelo a se stesso dopo aver descritto un percorso chiuso, ma risulterà ruotato di un certo angolo dipendente dal percorso stesso: l’angolo acquisito è un esempio di olonomia. Il vettore generalmente non tornerà parallelo a se stesso nonostante la prescrizione imposta sul trasporto. Questo è un esempio di olonomia dovuto alla geometria (curva) dello spazio in cui il trasporto avviene.E’ interessante considerare il caso del trasporto parallelo di un vettore sulla superficie di un cono (Fig 2.2). Figura 2.2: Un vettore trasportato parallelamente su una superficie di un cono. Essa è certamente curva e dunque ci si aspetta di osservare effetti analoghi a quelli visti nel caso della superficie sferica, ma una particolarità del cono è che risulta piatto quasi ovunque: la curvatura ha origine nel suo vertice. Se infatti tagliassimo il cono lungo una linea congiungente il vertice con un punto della sua base otterremmo una superficie piatta, ovvero la porzione di un piano. Dunque un vettore “avverte” la curvatura della superficie durante il suo spostamento, senza necessariamente passare per il vertice, dove questa curvatura ha origine. Curiosamente possiamo considerare questa situazione come l’equivalente geometrico dell’effetto Aharonov-Bohm: se una particella descrive un percorso chiuso attorno ad una regione in cui è confinato un campo magnetico, essa manifesterà la presenza di questo campo nell’acquisizione di una fase, senza necessariamente attraversare il campo e dunque interagire con esso. CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 17 Classicamente questo effetto è del tutto inspiegabile. Eppure l’effetto c’è e ciò suggerisce di reinterpretare i ruoli di campi e potenziali nella teoria dell’elettromagnetismo e di indagare più a fondo il carattere geometrico di quest’ultima e le applicazioni che esso può avere. In ottica la fase di Berry ha avuto numerose applicazioni, in particolare si manifesta quando il campo subisce manipolazioni della polarizzazione nei mezzi anisotropi. 2.1.1 Sfera di Poincarè e parametri di Stokes Per rappresentare luce non polarizzata, parzialmente polarizzata o polarizzata un utile strumento è la sfera di Poincarè. Si definisce luce parzialmente polarizzata una mescolanza di luce polarizzata e non polarizzata. I parametri di Stokes a differenza dei vettori di Jones che descrivono solo stati puramente polarizzati, rappresentano la polarizzazione parziale di un fascio di luce che subisca assorbimento isotropo, per questo motivo sono il sistema di coordinate della sfera di Poincarè, tale che lo stato di polarizzazione della luca sia in corrispondenza biunivoca con ogni punto della sfera.[7] Si consideri l’intensità di un fascio di luce come la somma di luce perfettamente polarizzata e completamente non polarizzata, assumendo che entrambi i tipi di luce propaghino nella stessa direzione. I = Ipol + Iun (2.5) La caratteristica principale della luce non polarizzata è che non può essere completamente assorbita da un singolo polarizzatore (anche in combinazione con una lamina di ritardo). D’altro canto la luce polarizzata (lineare, circolare o ellittica) può sempre essere rappresentata da un vettore di Jones, ed è sempre possibile assorbirla completamente utilizzando una lamina di ritardo a λ4 e un singolo polarizzatore. Si può introdurre il grado di polarizzazione come la frazione di intensità corrispondente a uno stato di polarizzazione definito: Ipol Ipol + Iun ξpol = (2.6) Quindi, se la luce risulta essere perfettamente polarizzata ξpol = 1, se è completamente non polarizzata ξpol = 0. Il vettore di Stokes può essere rappresentato come un vettore colonna: S0 S1 S2 S3 S0 descrive l’assorbimento da parte di un componente ottico dell’intensità di un fascio avente Iin come intensità in ingresso: S0 = I Iin = Ipol +Iun Iin S1 descrive quanto la luce risulta polarizzata orizzontalmente o verticalmente: S1 = 2Ior Iin − S0 Dove Ior rappresenta la quantità di luce rilevata da un detector se un polarizzatore ideale con asse orizzontale fosse posto davanti al detector. S2 descrive quanto la luce risulta polarizzata in obliquo: CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS S2 = 2I45◦ Iin 18 − S0 Dove I45◦ allo stesso modo rappresenta la quantità di luce rilevata da un detector se un polarizzatore ideale con asse a 45◦ fosse posto davanti al detector. Infine S3 descrive quanto la luce risulta polarizzata circolarmente (destra o sinistra): S3 = 2Ir−cir Iin − S0 Dove Ir−cir rappresenta la quantità di luce rilevata da un detector se un polarizzatore circolare destro ideale fosse posto davanti al detector. Considerando un fascio di luce tale che Ipol = |A|2 + |B|2 , quindi con un vettore di Jones per la porzione di luce A polarizzata corrispondente a si può riscrivere il vettore di Stokes come: B Ipol + Iun S0 2 2 S1 = 1 |A| − |B| S2 Iin A∗ B + AB ∗ S3 i(A∗ B − AB ∗ ) Utilizzando la 2.6 se la luce risulta essere perfettamente polarizzata allora i parametri di Stokes sono legati dalla relazione: S02 = S12 + S22 + S32 Visti sulla sfera di Poincarè saranno: Figura 2.3: Sfera di Poincarè. Dove i punti interni rappresentano luce parzialmente polarizzata. Quindi cambiare lo stato di polarizzazione di un’onda significa muoversi lungo una curva definita sulla sfera. A partire da un certo stato iniziale di polarizzazione, rappresentato sulla sfera di Poincarè dal punto P0 , questo viene variato passando per altri stati di polarizzazione, fino a ritornare a quello iniziale: viene quindi realizzato un percorso chiuso. A causa di queste trasformazioni viene introdotto un ritardo di fase nell’onda, che è proprio pari CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 19 alla fase γ introdotta precedentemente, ovvero la fase geometrica (o di PanchartnamBerry. Questo ritardo di fase risulta proporzionale all’entità della trasformazione subita, in particolare è proporzionale all’angolo solido sotteso dalla superficie racchiusa dalla curva: γ = ± Ω2 . (Fig 2.4) Nel quale il segno sarà positivo se vista dall’esterno la curva Figura 2.4: Sfera di Poincarè. Tre punti A B C sono collegati tramite geodetiche viene percorsa in senso antiorario, negativo altrimenti. E’ importante sottolineare che una trasformazione dello stato di polarizzazione sulla sfera di Poincarè, che abbia lo stato finale coincidente con quello inziale può essere realizzata anche percorrendo una stessa curva due volte ma in verso opposto, in questo modo, però, l’angolo solido risulta nullo poiché è nulla la superficie racchiusa dal percorso effettuato che esso sottende, quindi anche la fase geometrica γ risulta nulla. Trasformazioni di questo tipo, quindi, non saranno qui tenute in considerazione. Come si è visto prima però la fase geometrica risulta solo uno dei due termini componenti il ritardo di fase globale dell’onda, a questo termine va aggiunto il ritardo di fase dinamica. Nel caso in cui le due fasi non risultino separabili, la fase geometrica perde di significato dal punto di vista fisico, infatti, non permette di strutturare il fascio né da un punto di vista dell’intensità né della fase, lasciando invariata sia la distribuzione di intensità sia la struttura del fronte d’onda; quella che, invece, permette di strutturare il fascio sia in intensità che in fase, è una variazione unicamente di fase geometrica. Ed è per questo che la GPLs(Par 2.2) per strutturare un fronte d’onda agisce andando a modificare solo la polarizzazione dell’onda mantenendo la differenza di cammino ottico (fase dinamica) pari a zero. Di particolare interesse sono quindi le geodetiche, archi di circonferenza tali che il percorso congiungente due punti sia il minimo possibile ( generalizzazione di una linea dritta su una superficie curva) poiché per tali curve la fase dinamica è costante (per un mezzo a spessore costante).(Fig 2.4) CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 2.2 2.2.1 20 GPLs Ottica dei cristalli liquidi e lamine di ritardo I cristalli liquidi sono dei composti organici in una particolare fase intermedia tra quella liquida isotropa e quella cristallina, detta anche mesofase. Esibiscono una fluidità tipica dei liquidi e alcune proprietà di anisotropia tipiche dei cristalli, come ad esempio anisotropia ottica, elastica, ecc. I più comuni e più utilizzati nelle applicazioni sono i cristalli liquidi nematici, che otticamente si comportano come cristalli uniassici. Nei cristalli uniassici il campo che li attraversa ”vede” un indice di rifrazione diverso in base alla direzione di propagazione incidente e alla polarizzazione del campo stesso. La direzione dell’asse ottico del mezzo (da cui il nome uniassico) rappresenta quella tale che se il campo si propaga in direzione parallela ad essa il mezzo viene visto dal campo come isotropo e quindi il campo vedrà lo stesso indice di rifrazione indipendentemente dalla polarizzazione. Il comportamento di tali materiali è individuato da due soli parametri ottici caratteristici: ”l’ indice di rifrazione ordinario” no e ”l’ indice di rifrazione straordinario” ne (θ). Per comprendere la relazione tra direzione di propagazione incidente e indice di rifrazione si può utilizzare un metodo grafico: l’ellissoide degli indici(Fig. 2.5). Figura 2.5: Sezione dell’ellissoide degli indici Si supponga di avere un mezzo uniassico omogeneo con asse ottico n lungo l’asse z e un’onda che si propaga con un vettore d’onda k che fa un dato angolo θ con n. Data la simmetria di rotazione del sistema rispetto all’asse z, si può sempre scegliere l’asse x nel piano contenente il vettore d’onda e l’asse ottico. Si vede facilmente che il piano d’onda (piano ortogonale al vettore k) passante per l’origine degli assi interseca l’ellissoide degli indici lungo una ellissi che ha un semiasse di lunghezza no lungo l’asse y perpendicolare al piano individuato dal vettore d’onda k e dal direttore n (piano y = 0). L’altro semiasse giace nel piano y = 0 ed ha una lunghezza n(θ) che dipende dal valore dell’angolo θ (in fig 2.5 è mostrata la sezione dell’ellissoide nel piano y = 0). L’onda polarizzata lungo l’asse y viene detta “onda ordinaria” e “vede” sempre lo stesso indice ordinario no , mentre l’altra viene detta onda straordinaria e “vede” l’indice ne (θ). Il valore dell’indice ne (θ) è pari alla lunghezza del segmento OP in fig.2.5, dove P = (x, y) CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 21 è il punto di intersezione fra il piano d’onda ortogonale a k e l’ellissi di equazione: x2 z2 + =1 n2o n2e (2.7) Dalla 2.7 si ricava quindi: no ne n2e cos2 (θ)+n2o sin2 (θ) ne (θ) = √ tale che per θ = 0 ⇒ no = no e ne (θ) = no e per θ = π2 ⇒ no = no e ne (θ) = ne . Si consideri una lamina di materiale uniassico di spessore d e con asse ottico n dovunque orientato lungo una data direzione. Un’onda elettromagnetica monocromatica polarizzata linearmente di lunghezza d’onda nel vuoto pari a λ0 e pulsazione ω incide sulla lamina. All’uscita della lamina le componenti dell’onda ordinaria e straordinaria risulteranno sfasate di δ = 2π λ0 (ne (θ) − no )d (fase dinamica). Nel caso in cui questa differenza di fase viene mantenuta costante si parla di lamina di ritardo, mezzi birifrangenti capaci di modificare lo stato di polarizzazione di un’onda, a seconda del valore fissato dello sfasamento δ (ad es. con δ = π si ottiene una lamina λ 2 (Fig.2.6) ovvero, tale che se in ingresso vi è un campo polarizzato linearmente che forma un certo angolo ψ con l’asse ottico ne uscirà un campo polarizzato linearmente che forma un angolo 2ψ con la direzione del campo incidente o ancora se δ = π2 si ottiene Figura 2.6: L’asse fast è un asse ortogonale all’asse ottico: in figura il campo forma un angolo di π4 rispetto all’asse ottico e per questo ne esce polarizzato ortogonalmente al precedente. una lamina λ4 ovvero, tale che se in ingresso vi è un campo polarizzato linearmente ne uscirà un campo polarizzato ellitticamente e se la direzione del campo incidente forma un angolo di π4 con l’asse ottico ne uscirà polarizzata circolarmente (Fig.2.7)). CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS Figura 2.7: Il campo forma un angolo di circolarmente. 2.2.2 π 4 22 rispetto all’asse ottico e ne esce polarizzato Funzionamento di una GPLs La potenza dei cristalli liquidi rispetto ai normali cristalli anisotropi sta nel fatto che, grazie alla loro fluidità, l’asse ottico può essere manipolato molto facilmente grazie ad un campo esterno che alimenta la lamina: a seconda del valore del campo la lamina può funzionare come lamina di ritardo a qualsiasi valore di δ. La GPLs non è altro che una lamina di ritardo con un pattern non uniforme dell’asse ottico nel piano trasverso. Ciò si potrebbe ottenere anche con i normali mezzi birifrangenti ”attaccando” tra loro tante piccole lamine sottili con diversi pattern dell’asse ottico incisi su di essi, ma non risulta molto conveniente e in più una volta fissato il pattern non è più modificabile. [1] Proprio grazie alla distribuzione dell’asse ottico viene introdotta la fase geometrica, Figura 2.8: Funzionamento di un componente ottico a fase geometrica CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 23 infatti, si consideri un’onda piana polarizzata circolarmente che attraversi il componente, l’effetto della lamina quando è ”accesa” (funzionando come lamina a λ2 ) sarà di invertire la polarizzazione (da circolare destra a sinsitra o viceversa). Le trasformazioni di polarizzazione che avvengono nel mezzo però saranno diverse se corrispondenti a due punti diversi del piano trasverso: considerando due posizioni P1 (x, y) e P2 (x, y) ci saranno due differenti evoluzioni della polarizzazione, che corrispondono a due distinti meridiani della sfera di Poincarè, condividendo però il punto iniziale e finale in quanto partono dallo stesso stato di polarizzazione (ad esempio circolare destra) e arrivano allo stesso stato finale (circolare sinistra), dunque nel complesso il percorso può essere visto come un percorso chiuso che parte e si conclude nello stesso punto. I due raggi uscenti da P1 (x, y) e P2 (x, y) acquisiranno quindi un ritardo di fase relativo puramente geometrico dato da metà dell’angolo solido sotteso dai due meridiani e di conseguenza il fronte d’onda ne uscirà modificato. (Fig 2.8) Per descrivere matematicamente l’azione di un componente ottico a fase geometrica, un utile strumento è il formalismo delle matrici di Jones, nel quale lo stato di polarizzazione, come accennato precedentemente, è descritto da un vettore colonna a due elementi, le cui componenti rappresentano l’ampiezza delle due componenti ortogonali del campo, contenenti però anche la fase relativa tra le due, che appunto ne descrive la polarizzazione (la scelta delle due direzioni ortogonali sulle quali considerare il campo definirà la base nello spazio dei vettori di Jones es. nella base lineare una polarizzazione 1 . Nella steslineare diretta lungo l’asse orizzontale di riferimento in è descritta da 0 1 1 sa base una polarizzazione circolare sinistra √12 e destra da √12 . Passando i −i alla base circolare invece polarizzazione circolare sinistra e destra si rappresenteranno 0 1 ). L’azione di un componente ottico, invece, può e rispettivamente come 1 0 essere descritta da una matrice 2x2 che agisce sulla polarizzazione del campo (vettore colonna) come un prodotto righe per colonne. In particolare, un mezzo birifrangente nella base lineare che utilizza come assi di riferimento l’asse ottico del mezzo e quello ortogonale ad esso (asse fast) (o anche asse straordinario ed ordinario) potrà essere rappresentato da: −iδ e 0 Lo (θ) = 0 eiδ Sempre in base lineare ma utilizzando come assi di riferimento degli arbitrari assi xy del piano trasverso tale che l’asse fast formi un angolo θ con l’asse x sarà: Lθ = R(−θ)Lo R(θ) cosθ −sinθ matrice di rotazione la cui azione è quella di ruotare l’asse sinθ cosθ x nell’asse fast (ordinario) e y nell’asse ottico (straordinario). Passando invece alla base circolare sarà rappresentato da: 0 e−i2θ δ 1 0 δ Cθ = cos 2 - i sin 2 i2θ 0 1 e 0 con R(θ) = (In questa espressione è esclusa la fase dinamica in quanto è la stessa per ogni componente.) La fase δ = 2π λ0 (ne (θ) − no )d è il ritardo dato dal mezzo birifrangente, che per CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 24 una lamina a λ2 ⇒ δ = π. In una GPL la direzione dell’asse ottico dipende però dalle coordinate xy sul piano trasverso quindi si avrà θ = θ(x, y). Di conseguenza la matrice di Jones per una GPL che funziona da lamina a λ2 sarà: 0 e−i2θ(x,y) Cθ = −i i2θ(x,y) (2.8) e 0 Applicando la 2.8 a un’onda polarizzata circolare sinistra e destra in base circolare: 0 e−i2θ(x,y) 1 0 i2θ(x,y) = e (2.9) i2θ(x,y) 0 1 e 0 0 e−i2θ(x,y) 0 1 −i2θ(x,y) = e (2.10) i2θ(x,y) 1 0 e 0 Quindi la polarizzazione è invertita e inoltre è introdotta una fase geometrica che varia nello spazio, dalla quale poi dipenderà la struttura del fronte d’onda in uscita. Nel caso di una GPLs (lente a fase geometrica sferica) la distribuzione della direzione dell’asse ottico varia quadraticamente con x e y(Fig 2.9). Si potrà perciò scrivere: θ(x, y) = σ x2 +y 2 4 r2 Dove σ = ±1, il segno dipende dalla direzione di rotazione dell’asse ottico, ovvero se ruota in senso orario o antiorario rispetto all’origine e r è il raggio di curvatura della lente equivalente alla lamina. Inoltre σ può invertirsi di segno semplicemente cambiando Figura 2.9: GPLs faccia del dispositivo che vede l’onda in ingresso o variando l’elicità dell’onda (sinistra o destra). Per un’onda polarizzata circolarmente il ritardo di fase introdotto dalla GPL sarà allora: 2 γ = ± σ2 x r+y 2 2 dove per una polarizzazione circolare sinistra ± = + e viceversa per quella destra. Inoltre il fronte d’onda uscente è uguale a quello che si avrebbe in uscita da una lente di lunghezza focale f = ±σ πλ r2 . Dunque, a seconda di quale delle due facce della GPL è rivolta verso l’onda in ingresso e a seconda di quale polarizzazione circolare vi è in input (sinistra o destra) sarà determinato il segno della distanza focale di una GPL in modo tale che se la distanza focale è positiva si comporta come lente convergente (Fig. 2.10), negativa divergente (Fig. 2.11). CAPITOLO 2. FASE DI PANCHARATNAM-BERRY E GPLS 25 Figura 2.10: GPLs come lente convergente: incide una polarizzazione circolare destra e in uscita vi è una polarizzazione circolare sinistra Figura 2.11: GPLs come lente divergente: incide una polarizzazione circolare sinistra e in uscita vi è una polarizzazione circolare destra Capitolo 3 Interferometro di shearing: realizzazione e risultati In questo capitolo si illustrerà l’allestimento dell’interferometro di shearing radiale basato sulla fase di Pancharatnam-Berry. Questo è costituito da due GPLs, illustrati nel capitolo 2, inseriti tra due polarizzatori incrociati. Si mostrerà, quindi, il funzionamento dell’interferometro nel caso dell’analisi di una lente cilindrica simulata mediante un Modulatore Spaziale di Luce (SLM). 3.1 Apparato sperimentale Figura 3.1: Apparato sperimentale dell’interferometro di shearing radiale basato sulla fase geometrica. 1. Sorgente laser: il laser (HeNe) emette un fascio in continua, in ottima approssimazione gaussiano, avente una lunghezza d’onda λ = 632.8nm (colore rosso), è inoltre polarizzato linearmente e con una potenza massima di Pmax = 10mW . 26 CAPITOLO 3. INTERFEROMETRO DI SHEARING: REALIZZAZIONE E RISULTATI27 2. Attenuatore variabile: in figura (3.1) è visto come un unico componente, nel interferometro utilizzato l’attenuatore (costituito da un filtro grigio a trasmittanza variabile) è abbinato ad una lamina a λ2 e cubo polarizzatore per diminuirne ulteriormente l’intensità a causa dell’elevata sensibilità della telecamera. 3. Beam Expander: questo sistema è formato da due lenti convergenti con focali f1 = 3, 0 ± 0, 1cm f2 = 100 ± 1mm. Il sistema è afocale (un fascio di raggi paralleli in ingresso resta tale in uscitale). Queste lenti sono utilizzate per estendere il fascio ovvero per aumentare il ”waste” w del fascio gaussiano, ovvero il raggio a e12 dal picco della gaussiana. 4. M1 e M2: sono specchi utilizzati per mandare il fascio sull’SLM (M1) e raccogliere il raggio riflesso dall’SLM con l’informazione sulla lente simulata che si vuole analizzare (M2). 5. SLM: il modulatore spaziale di luce simula l’oggetto da analizzare, nella nostra misura simula una lente cilindrica. 6. Iride: dispositivo avente la funzione di filtro spaziale per poter bloccare, in buona approssimazione, gli ordini di diffrazione successivi al primo, provenienti dall’SLM (non presente in figura). 7. L1 e L2: queste due lenti compongono un telescopio. Sono disposte in modo tale da trasmettere sulla prima GPL il campo uscente dall’SLM, conservando la fase in quel piano, che sarebbe stata altrimenti modificata con la propagazione. 8. Cubo polarizzatore: il cubo è un cristallo birifrangente di calcite, che polarizza la luce nella direzione ortogonale al suo asse ottico. Esso ha due funzioni principali: in combinazione con la lamina a λ2 funge da attenuatore variabile; polarizza linearmente il fascio in ingresso sulle GPL: infatti nonostante il fascio in ingresso sia già polarizzato linearmente i componenti ottici che il fascio attraversa tendono a ”sporcare” la polarizzazione. 9. HWP Lamina a λ2 : come si è già visto in precedenza, questa lamina agisce su un campo polarizzato linearmente variandone la polarizzazione (se il campo forma un certo angolo ψ con l’asse ottico ne esce un campo polarizzato linearmente che forma un angolo 2ψ con la direzione del campo incidente). E’ utilizzata solo per controllare l’angolo tra l’asse del polarizzatore e quello dell’analizzatore senza dover necessariamente ruotare analizzatore e polarizzatore. 10. GPLs: lenti sferiche a fase geometrica, identiche (stessa focale) e rivolte allo stesso modo (con la stessa faccia verso il campo in ingresso), costituiscono il cuore dell’interferometro in quanto generatori dello shear. Alle GPL è applicato un campo elettrico che permette di passare dallo sfasamanto δ = λ2 (GPL ”accesa”) a δ = 0 (GPL ”spenta”). (Cap. 2) 11. Analizzatore: è utilizzato per regolare la SP (shearing phase), in quanto quest’ultima dipende dall’angolo che vi è tra l’asse dell’analizzatore e quello del polarizzatore (o nella pratica con quella della lamina a λ2 ). Inoltre è necessario per visualizzare la figura di interferenza. CAPITOLO 3. INTERFEROMETRO DI SHEARING: REALIZZAZIONE E RISULTATI28 12. L3 e L4: analogamente alle lenti L1 ed L2 compongono anch’esse un telescopio. Sono disposte in modo tale da trasmettere sulla telecamera il campo immediatamente dopo la seconda GPL, conservando la fase in quel piano. 13. Telecamera: tale strumento presenta una risoluzione di 1280x1024 pixel e svolge la funzione di schermo, cioè raccoglie la figura d’interferenza finale, prodotta dall’interferometro di shearing. 3.2 Esempio di misura e risultati Utilizzando la figura 3.1 come riferimento, si analizzerà il percorso del fascio gaussiano: il fascio diminuito di intensità grazie all’AV viene espanso e conseguentemente arriva sul modulatore spaziale di luce (SLM), il quale simula una lente cilindrica perfetta. Grazie a due iridi non rappresentate in figura arriva al polarizzatore solo il primo ordine di diffrazione, la cui immagine risulta ellittica. Il campo polarizzato linearmente può essere visto come somma di due campi polarizzati circolarmente ortogonali (circolare sinistra e circolare destra) (E=σ+ +σ− ). Giunto sulla prima GPLs, come si è visto nel capitolo 2, se quest’ultima risulta funzionante come lamina a λ2 (”accesa”) una componente del campo vedrà una focale positiva (convergente) e quella ortogonale una focale negativa (divergente). A tal proposito è stata fatta una prima misura senza far passare il fascio per l’SLM, solo per verificare il funzionamento della GPLs (è stata posta in questo caso una lamina a λ4 per far incidere sulla lente solo una polarizzazione circolare): da spenta , accesa convergente e accesa divergente (fig. 3.2) Figura 3.2: In ordine da sinistra: lente spenta, convergente e divergente L’azione della seconda lente è quella di bilanciare questo ridimensionamento, infatti è posta esattamente con la stessa faccia della prima lente rivolta verso il campo in ingresso: se fosse posta ad una distanza z = 0 dalla prima lente si otterrebbe in uscita dalla seconda lente esattamente lo stesso fascio in ingresso sulla prima perché: σ+ ⇒(GP L1) σ− e−iψ ⇒(GP L2) σ+ eiψ e−iψ = σ+ σ− ⇒(GP L1) σ+ eiψ ⇒(GP L2) σ− e−iψ eiψ = σ− Essendo invece z = ζ con ζ > 0 sulla seconda lente la fase del campo arriverà modificata a causa della propagazione lungo ζ, ciò implica che la seconda lente riesce solo in parte a bilanciare l’effetto della prima, in modo tale che il fascio che dalla prima ne usciva divergente ne risulterà espanso e quello convergente contratto. La differenza tra i due fasci dopo la seconda GPL è il parametro di shear SE (shear expansion). Essendo dipendente dalla distanza ζ a cui sono poste le lenti, per controllarlo e ottenere il valore ottimale basterà variare questa distanza. (Fig. 3.3) CAPITOLO 3. INTERFEROMETRO DI SHEARING: REALIZZAZIONE E RISULTATI29 Figura 3.3: Azione delle due GPLs e parametro SE. Un ulteriore misura senza SLM è stata presa anche per visualizzare il fascio espanso e il fascio compresso singolarmente, facendolo passare per entrambe le lenti accese. Quello compresso corrisponde a quello che precedentemente era convergente e quello espanso a quello divergente. (Analogamente al caso precedente è inserita una lamina a λ4 prima della prima lente tale che il campo incidente abbia solo una polarizzazione circolare cosı̀ da ottenere in uscita un unico fascio). Figura 3.4: In ordine da sinistra: due lenti spente, compresso ed espanso Continuando il percorso, ora i due fasci attraverseranno l’analizzatore e andranno ad interferire sul sensore della telecamera. Si può dimostrare che l’intensità visualizzata sul sensore in funzione dell’angolo ψ, ovvero l’angolo tra l’asse dell’analizzatore e del polarizzatore risulta essere proporzionale a: I(ψ) = |S|2 cos2 ψ + |D|2 sen2 ψ + Im(SD∗ )sen2ψ (3.1) Dove S = E+ + E− e D = E+ − E− ed è identificato con E+ il campo espanso ed E− il campo contratto in uscita dalle lenti. Per ottenere la forma dei campi si può utilizzare un teorema [8] che afferma che l’azione di qualsiasi componente ottico del prim’ordine (ovvero quadratico o uniforme) può essere schematizzata con tre operatori: l’operatore 2 2 che descrive la lente Q(c) = eic(x +y ) , l’integrale di propagazione √ libera di Fresnel R(d), un operatore di ridimensionamento ν(t) tale che ν(t)f (x) = tf (tx). L’azione delle due lenti sui campi in ingresso potrà allora essere descritta come: σ ± (r, φ, ζ)) = Q(c2 )R(ζ)Q(c1 )(σ σ ± (r, φ, ζ)). E± (r, φ, ζ) = ĉ(σ Sfruttando le proprietà di tali operatori si potrà riscrivere: σ (r, φ, ζ) + o(2 ) σ ± (r, φ, ζ)) = ν[1 ± ]Q[+ ]R[ζ(1 ± )]σ ĉ(σ f con = ζ f (3.2) 1, trascurando dunque l’effetto di propagazione libera si otterrà: σ ((1 + )r, φ, ζ) + o(2 ) E+ (ζ) = (1 + )σ (3.3) CAPITOLO 3. INTERFEROMETRO DI SHEARING: REALIZZAZIONE E RISULTATI30 σ ((1 − )r, φ, ζ) + o(2 ) E− (ζ) = (1 − )σ (3.4) che sostituite nella (3.1) troncata al secondo ordine in portano a: |S|2 = 4σσ ∗ + o(2 ) |D|2 = 42 (σσ ∗ + 2rRe(σσ 0∗ ) + r2 |σ 0 |2 con σ 0 = ∂ ∂r σ Re(SD∗ ) = 4(σσ ∗ + 2rRe(σσ 0∗ ) + o(2 ) Im(SD∗ ) = 4rIm(σσ 0∗ ) + o(2 ). Come si può notare il profilo di fase del campo (Im(σσ 0∗ )) è contenuto nella parte immaginaria di SD∗ . Per ottenerla a partire da (3.1) si può notare che I( π4 ) − I(− π4 ) = 2Im(SD∗ ) A questo proposito sono state prese due misure corrispondenti a ψ = π4 e ψ = − π4 . (Fig. 3.5) Conseguentemente ne è stata eseguita la sottrazione (fig 3.6) ed è stato sviluppato Figura 3.5: I(ψ = π4 ) e I(ψ = − π4 ) un modello teorico per verificare i risultati previsti (fig 3.7). Le misure dunque risultano consistenti con il modello teorico. Figura 3.6: I(ψ = π4 ) - I(ψ = − π4 ) CAPITOLO 3. INTERFEROMETRO DI SHEARING: REALIZZAZIONE E RISULTATI31 Figura 3.7: Misura ottenuta (sinistra) modello teorico(destra) Conclusioni Si è visto, dunque, che un interferometro di shearing può essere efficientemente implementato utilizzando una coppia di PBOE (componenti ottici basati sulla fase di Panchartnam-Berry). Questo approccio aumenta la versatilità di questo tipo di interferometro in termini di riutilizzo, gestibilità, compattezza e controllo indipendente dei due parametri di shearing: SD/SE e SP. Con questo metodo, è inoltre possibile scegliere la geometria che si vuole utilizzare per studiare il componente ottico da analizzare (lineare, radiale o azimutale), semplicemente cambiando la lente a fase geometrica; senza modificare i pregi o difetti di una definita geometria di shearing. I parametri spaziali SD/SE sono infatti riferiti alle sole proprietà geometriche dei PBOE (focale della lente e distanza tra la coppia di lenti), mentre SP è collegato alla manipolazione della polarizzazione (distribuzione dell’asse ottico nel piano trasverso). La grande potenza di questo approccio è ancor più chiara quando il PBOE è utilizzato per ottenere derivate non uniformi, cosa quasi impossibile con differenti assetti come quelli analizzati in precedenza. Inoltre, l’utilizzo di cristalli liquidi garantisce non solo un’alta trasmissività ma permette anche un efficace controllo di tutta l’operazione di shearing per mezzo di un campo esterno che lo alimenta. Si può pensare infatti, di utilizzare in futuro la possibilità di “spegnere” ed “accendere” il dispositivo tramite il campo esterno, combinando diversi interferometri di shearing per ottenere non solo la derivata parziale rispetto ad una sola variabile, ma in generale un intero differenziale a due dimensioni. 32 Appendice A Teorema adiabatico Data l’equazione di Schrödinger i ∂ ψ(t) = Hψ(t) ∂t (A.1) in cui l’hamiltoniano è indipendente dal tempo, una particella che si trovi a t = 0 nel suo n-esimo autostato ψn , Hψn = En ψn , evolve nel medesimo autostato come ψn (t) = e−iEn t ψn (0). Se l’hamiltoniano è dipendente esplicitamente dal tempo, anche autovalori e autostati lo sono; a ogni istante t si potrà scrivere H(t)ψn (t) = En (t)ψn (t) (A.2) valendo la proprietà di ortonormalità hψn (t)|ψm (t)i = δnm ∂ La soluzione generale dell’equazione di Schrödinger (i ∂t ψ(t) = H(t)ψ(t)), può essere sviluppata in serie di Fourier: X ψ(t) = cn (t)ψn (t)eiφn (t) (A.3) n dove Z φn = − t En (t0 ) dt0 (A.4) 0 Sostituendo la (A.3) nell’equazione di Schrödinger si ottiene: P P i n [ċn (t)ψn (t) + cn (t)ψ̇n (t) + icn (t)ψn (t)φ̇n (t)]eiφn (t) = n cn (t)(Hψn (t))eiφn (t) e sostituendo l’espressione di φ(t) (A.4) si ottiene: X [ċn (t)ψn (t) + cn (t)ψ̇n (t)]eiφn (t) = 0 n 33 (A.5) APPENDICE A. TEOREMA ADIABATICO Proiettando entrambi i membri su hψm |, X X ċn (t)δnm eiφn (t) = − cn (t)hψm (t)|ψ̇n (t)ieiφn (t) n 34 (A.6) n ossia: ċm (t) = − X cn (t)hψm (t)|ψ̇n (t)iei(φn (t)−φm (t)) (A.7) n differenziando rispetto al tempo la (A.2), H(t)ψ̇n (t) + Ḣ(t)ψn (t) = Ėn (t)ψn (t) + En (t)ψ̇n (t) proiettando anche quest’ultima su hψm | si otterrà: hψm |H ψ̇n i + hψm |Ḣψn i = Ėn δmn + En hψm |ψ̇n i quindi per n 6= m hψm |Ḣψn i = (En − Em )hψm |ψ̇n i sostituendo nella (A.7) ċm = −cm hψm |ψ̇m i − P hψm |Ḣψn i i(φn −φm ) n6=m cn En −Em e L’approssimazione adiabatica consiste nel considerare hψm |Ḣψn i En − Em , cosı̀ da poter trascurare il secondo termine. ċm = −cm hψm |ψ̇m i (A.8) Risolvendo per separazione di variabili si ottiene: cm (t) = cm (0)eiγm (t) dove Z γm (t) = i t hψm (t0 )|ψ̇m (t0 )i dt0 (A.9) (A.10) 0 Quindi se il sistema all’istante t = 0 si trova nell’n-esimo autostato di H(0) la (A.3) diventa: ψ(t) = eiγn (t) eiφn (t) ψn (t) ritornando allo stato iniziale avendo acquisito però una differenza di fase, senza variazione di energia. Bibliografia [1] Bruno Piccirillo, Michela Florinda Picardi, Lorenzo Marrucci, and Enrico Santamato. Flat polarization-controlled cylindrical lens based on the pancharatnam–berry geometric phase. European Journal of Physics, 2017. [2] Reena Disawal, Jitendra Dhanotia, and Shashi Prakash. Phase-shifting lateral shearing interferometry using wedge-plate and interferometric grating. Applied optics, 2014. [3] Mahendra P. Kothiyal and Claude Delisle. Shearing interferometer for phase shifting interferometry with polarization phase shifter. Applied optics, 1985. [4] Dalip Singh Mehta, Mohammad Inam, Jai Prakash, and A. M. Biradar.Liquidcrystal phase-shifting lateral shearing interferometer with improved fringe contrast for 3D surface profilometry. Applied optics, 2013. [5] X. Liu, Y.Gao, M.Chang. A new lateral shearing interferometer for precision surface measurement. Optics and Lasers in Engineering, 2009. [6] Luis A. Alemàn-Castaneda, Bruno Piccirillo, Enrico Santamato, Lorenzo Marrucci, Miguel A. Alonso. Shearing interferometry via geometric phase. Optica,2018. [7] Justin Peatross, Michael Ware. Physics of Light and Optics. [8] Joseph W. Goodman. Introduction to Fourier optics. 35