caricato da
common.user2496
ELETTRONICAE

L’AZIONAMENTO
esercitazioni
INDICE
INTERFACCIE IN INGRESSO
INTERFACCIE IN USCITA
FILTRI
MAT
ELETTRONICA DI POTENZA
CONVERTITORI
TRASMISSIONE MECCANICA
PROGRAMMAZIONE
PLC
ARDUINO
L’AZIONAMENTO
INTERFACCE DI INGRESSO
AD590
LM35
UMIDITA
RIEPILOGO
ESTENSIMETRO
RIEPILOGO
FOTODIODO
CONDIZIONAMENTO
VIBROTRASLATORE
CONCENTRAZIONE
ACCELEROMETRO
Trasduttore di temperatura: AD590
Un trasduttore AD590 viene utilizzato per misurare una temperatura variabile nel range 0°C80°C. Calcolare il range della
corrente erogata dal trasduttore Con il range della tensione compresa fra 0 e 10 v
Caratteristica di trasferimento dell’AD590:
T temperatura espressa in K
K 1A / K (costante del trasduttore)
SOLUZIONE
Calcolo range della temperatura in K
T 0C 80C
+273
Tmin K 0 273 273K
Tmax K 80 273 353K
Calcolo del range della I erogata dal trasduttore
I K T
CONFIGURAZIONI SIMILI
AMPLIFICATORE DI TENSIONE
La conversione I => V è affidata ad un amplificatore operazionale che, per le sue
caratteristiche, oltre a non caricare il segnale prodotto dal trasduttore, lo amplifica
Affinché la tensione d'uscita Vo (per T =0°C) sia uguale a O V,
deve essere I= ls = 273 microA
Applicando il primo principio di Kirchhoff al nodo A,si ha:
I1(10) °C = ls(0°C) - I= 273*10-6- 273*10-6= 0A
poichè I1 è uguale a zero la Vout è= <O
calcolare R3 + R1 con Vdd = 12 V
R3 + R1 = Vdd - O/ I1(0°C) = 12/273*10^-6 = 44 K (R3 = 39, R2 = 5)
calcolare R4 + R2
Quando la temperatura e 80 °C e la corrente Is di 353 mlcroA, si ha:
I1(80°C)= ls(80°C) - I = 353*10^-6 - 273’10^-6= 80 microA
Nell'ipotesi che l'operazionale sia ideale, la I1(80°C) attraversa la resistenza sul ramo
di reazione (R4+ R2) e si ha:
Vo(80°C)= ( R4 + R2) •I1(80°C)
R4 + R2 = Vo(80)/I1(80) = 10 / 80/10*10^A.6 = 125 K ( R4 =82 R2 = 47)
==============================================================
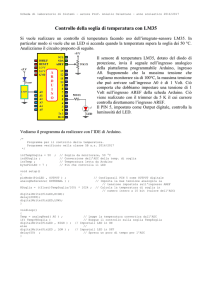
Esercizio LM35
Un trasduttore di temperatura fornisce una tensione di 10 mV/K, a 0 K la tensione è nulla.
Si vuole condizionare il segnale per ottenere una tensione di 100mV/°C
A 0°C la tensione e nulla, la temperatura deve variare tra –50°C +90°C proporre una soluzione e dimensionare i
componenti.
Con il sensore LM35 ---
Soluzione
V = 10 mV/°C
*t
V = 100mv* -50 (90) =
-5
NON è IL NOSTRO CASO
o+9
Il trasduttore fornisce una tensione compresa tra 2,23V3,63V nel range (-50°C+90°C)
La Tensione fornita dal trasduttore a 0°C (=273,16K)
Vs(0C) 10 10 3 273,16 2,73V
Affinché Vo=0V per T=0°C, la tensione VR=Vs(0°C)=2,73V
La tensione di riferimento VR (VR=2,73V) si ottiene con il partitore R5,R6.
R5=10K (trimmer lineare), R6=10K
con Vcc=+12v
a 0°C si sottrae 2,73V perche la tensione deve essere nulla.
Vs(-50C) 10 10 3 273,16 – 50 2,23V
Vs(90C) 10 10 3 273,16 +90 3,63V
Vo = (R2/R1)*(Vs-Vr)
(Trasduttore di umidità)
Un sensore capacitivo di umidità viene utilizzato per misurare un’umidità relativa variabile nel range 20% - 80%. Calcolare
il range della
capacità; Caratteristica di trasferimento del sensore:
Dove Co = 130 pF,
C = CO + A *UR
A = 0,41pf,
U umidita relativa
Si realizzi un circuito di condizionamento per il rilievo dell’umidità relativa nel range 10%÷90%.
La tensione di uscita Vo sia 0V per U%=10% e 5V per U%=90%.
La caratteristica di trasferimento del sensore
è rappresentata dalla seguente tabella
Soluzione.
In figura 1 è riportato lo schema a blocchi del sistema da progettare
1) Dimensionamento
blocco 1 (Astabile con NE555).
In figura 2 è riportato lo schema elettrico del circuito multivibratore con NE555
Per il calcolo della frequenza f si utilizza la seguente formula
1
f =
(RA +2RB) * Cs *0,7
Si pone RA= 10K; RB= 1,2M, in modo da avere un duty cycle DC%= 50%.
Dalla precedente formula si ricavano i valori della frequenza fmax
e fmin
2) Dimensionamento
blocco 2 (Convertitore Frequenza/Tensione).
In figura 3 è riportato lo schema elettrico del circuito convertitore frequenza/tensione basata sull’integrato LM331. Il
multivibratore astabile di figura 2 genera
un segnale ad
onda
quadra con frequenza f variabile dipendente dall’umidità
relativa Il circuito di figura 3 opera la conversione f/V secondo la seguente relazione
riassumendo
U% = 10%® f = 5,26KHz ®Vu = 5,26V
U% = 90%® f = 4,11KHz ®Vu = 4,11V
3)
Dimensionamento blocco 3 (Circuito traslatore).
In figura 4 è riportato lo schema elettrico del circuito traslatore.
1)
Vu = 5,26V Vo = 0V
0 =( R2/R1)*(VR-5.26)5.26
2) Vu = 4,11V Vo = 5V
5= (R2/R1)*(5,26 − 4,11)
R2 = 5K
R1 = 11,5 K
v
Controllo Umidita’ e Temperatura
Per rendere piu’ confortevole la reception di un
temperatura e umidita’.
circolo Tennis ,si vuole realizzare un sistema di controllo di
La temperatura deve essere deve essere mantenuta fra i 30°C e i 60°C, mentre l’umidita’ relativa
non deve essere maggiore ad Ur=30%.
Il sensore di temperatura ha un comportamento lineare da
15°C a 80°C con legge di funzionamento:
I(T)=Io + K*T
Con T e’ la temperatura in °C , Io= 2,7 milliA
e K= 20 microA/°C
Il sensore della umidita’ e’ capacitivo con legge di funzionamento:
C=(130 + 0,5*Ur)pF
Dove Ur e’ l’umidita relativa espressa in %.
Calcolare le interfacce che consentono di ottenere, al variare dei parametri fisici,
tensioni di 0-5 V in uscita
Il sistema deve acquisire i dati ogni 30 minuti e, attivare, se necessario, un impianto di
riscaldamento (o raffreddamento) e/o un impianto deumidificatore.
Soluzione
Per V che varia da 4,856 a 4,253 la
tensione deve variare fra 0 e 5 V
OPPURE: 555
Da cui si ricava: V2= 8,2918*(-V + 4,856)
R1 = R2 CON SU DIODO SU R2
Nei grafici seguenti i valori di Ur, Cs, f, V e V2 e i relativi circuiti di conversione:
.Preliminarmente si effettua la Taratura del convertitore f/V: si applica
una frequenza f=5467Hz e si regola il trimmer Rp fino ad ottenere
V=4,856V corrispondente ad una Ur=0%.
Cs->f; f->V; V->V2
Sensori in cui varia la resistenza: Estensimetro
Grandezze caratteristiche
Ro resistenza a riposo pari a 100 Ω,
La deformazione dell'estensimetro, provoca una variazione proporzionale della resistenza elettrica ∆R /R pari a K*ε.
Dove
La costante K, adimensionale, è il fattore dell'estensimetro (gauge factor) e per gli estensimetri a film metallico ha un valore tipico di circa 2.
Con ε viene indicato la deformazione, grandezza adimensionale espressa di solito in ppm (parti per milione) (valore tipico: 10^-3)
Con un sensore ∆Vo = Vs*∆R/2R
∆R /R= K*ε.
Vo = Vb(K*ε/2)
Con VB= 10 V ed ε=10-3 (valore tipico) e K = 2 si ottiene Vo=10 mV.
Volendo condizionare il segnale per una tensione compresa tra 0 V e 10 V deve risultare
Ad = Vu/Vo = =10/0,1 = 100 essendo 100 l’amplificazione
Soluzioni alternative
con l’uso del PLC
Nei PLC gli ingressi analogici possono rilevare un segnale in tensione (0 ÷ 10 Volt) o in corrente (0 ÷ 20 mA) che il
Plc trasforma in forma digitale.
2 Utilizzo di sensori
da 18 a 22 C
LM35
con PLC
-------- LM35 da 0 a 40 C
1) «PLC»: progettare un amplificatore di tensione da interfacciare con il PLC con tensioni che si hanno da 0 a 40 gradi
2) Per ottenere una maggiore precisione nella misura si può estendere il range di tensione a valori compresi tra 0 V e 10 V, accettati
dagli ingressi analogici dei relè programmabili.
Non si ha l’offset in quanto per LM35 la tensione vale 0 V a 0°C. ( in caso contrario si
sommatore)
elimina con un differenziale o con un
Come circuito di condizionamento si può utilizzare un amplificatore non invertente
Le funzioni richieste verranno effettuati attraverso la programmazione degli ingressi analogici dei rele programmabili (schede del
PLC)
l’umidità relativa deve essere mantenuta nel range 45%±5% per evitare la proliferazione di muffe; tale livello viene
garantito azionando per 10 minuti, se si è fuori dal range, gli aeratori o il sistema di nebulizzazione a pompa posto a
muro;
E nota la f.d.t. di un sensore di umidita con V = 0,75 U = 0% e V = 3,75 con U=100%
(Nei PLC gli ingressi analogici possono rilevare un segnale in tensione (0 ÷ 10 Volt) o in corrente (0
÷ 20 mA) che il Plc trasforma in forma digitale
Segnale d’ingresso da 0,75 a 3,75 V da grafico
PLC in ingresso da 0 a 10 v
Circuito di condizionamento: Traslatore di livello
Differenziale: R2=3,3 kΩ e R1=1 kΩ Vr = 0,75
Programmare il rele del PLC con soglia di intervento paria 2 e 2.5 V ( da grafico: U tra 40 e 50)
Un ’impianto è gestito da un sistema programmabile che, acquisiti i segnali provenienti dai sensori, avvia in
maniera automatica i sistemi di umidificazione, riscaldamento e regolazione della luminosità.
Le condizioni di funzionamento ottimale sono le seguenti:
a.il tasso di umidità deve essere mantenuto superiore al 40%: tale livello è garantito
da un sistema di
umidificazione costituito da un vaporizzatore libero di scorrere lungo una guida collocata sul soffitto. Quando
l’umidità scende sotto tale valore prestabilito si attiva il sistema di nebulizzazione, azionato da un motore, il quale
percorre per due volte in un senso e due volte nel senso opposto l’intera guida;
La caratteristica di trasferimento del sensore
è rappresentata dalla seguente tabella
a.la
temperatura nella micro serra deve essere mantenuta nel range 18 °C 22 °C: quando la
temperatura scende al di sotto di 18 °C viene attivato un sistema di piastre riscaldanti disposte
lungo le pareti del locale fino al raggiungimento di 20 °C; se la temperatura sale sopra i 22 °C si
attivano due ventole di aerazione che vengono spente al raggiungimento di 20 °C
a.Si
specifichi le caratteristiche dei sensori(da tabella per U e LM35) e ne progetti i relativi circuiti di
condizionamento del segnale di uscita ;
Attraverso la gestione di due fine corsa il PLC gestisce la movimentazione avanti indietro del motore di
condizionamento
La programmazione dei rele del PLC gestisce le piastre riscaldanti e la vaporizzazione
Si individui una idonea soluzione che permetta di diminuire la velocità di avanzamento nello spostamento orizzontale di un traslo
elevatore quando le vibrazioni rilevate da un apposito sensore montato sull’unità di aggancio/sgancio indicano una situazione
potenzialmente pericolosa.
In particolare, il sensore di vibrazioni produce un segnale compreso tra 4 e 20 mA su un carico di 500 Ω per vibrazioni comprese tra
0 e 50 mm/s.
In condizioni di normale funzionamento la vibrazione non deve superare la soglia di 30 mm/s: se tale valore viene superato, la
velocità di avanzamento del traslo-elevatore deve essere dimezzata ed essere mantenuta fino a raggiungere un valore per cui la
vibrazione risulti inferiore a 15 mm/s.
Per ragioni legate alla funzionalità e alla sicurezza dell’impianto, è richiesto che la soluzione proposta non prevede l’utilizzo
di dispositivi programmabili.
Per vibrazioni di
50 mms
----
0 mms
----
uscita sensore
20
ma
4
ma
∆I = 20 - 4 = 16 mA
∆vibr/ ∆corr = 50/16 = 3,1 mms/ma
-
Limite da non superare ---- 30 mms =3.1 X10 = 31 mms
Quando si supera il limite si dimezza la velocità fino a quando le vibrazioni scendono 15mms---- 5 ma
Scelta di un gruppo di azionamento di un sistema di trasporto casse motivando adeguatamente le
scelte effettuate con particolare riferimento alle procedure di manutenzione ordinaria previste.
Caratteristiche dei sistemi di trasporto per contenitori
I sistemi di trasporto per casse sono elementi di trasporto statici, dotati nella parte superiore di
rulli, nastri o cinghie. La loro funzione è quella di coprire la distanza all'interno di un'installazione,
secondo le esigenze di funzionalità e frequenza della movimentazione.
Mediante l'azionamento di un sistema di motorizzazione e di controllo di presenza attraverso un
elemento di rilevamento meccanico o ottico, è possibile spostare in maniera controllata i contenitori
verso le posizioni desiderate.
Motore utilizzato : motore asincrono con controllo velocità PWM
Vantaggi
Sistema robusto progettato per resistere a un utilizzo produttivo giornaliero ad alta produttività.
Design ergonomico e compatto che semplifica l’interazione tra la macchina e l’operatore.
Manutenzione minima e facile esecuzione degli ordini riguardante prevalentemente il MA
Costo operativo ridotto.
Manutenzione
•Dal punto di vista elettrico bisogna verificare periodicamente:
1) Le condizioni degli avvolgimenti statorici,
2) Verificare eventuali difetti sul rotore gabbia che si evidenziano con forti variazioni della
corrente assorbita dai circuiti statorici;
3) L’isolamento, da verificarsi tra ogni avvolgimento e la massa
Dal punto di vista meccanico,
le parti più soggette a manutenzione riguarda l’usura dei cuscinetti, per i quali occorre prevedere
una sostituzione periodica
Si progetti il circuito di interfaccia di un sensore che mantenga il
livello di concentrazione di un soluto (componente di una soluzione)
nell’intervallo 0.15-0.35 moli; quando il soluto supera la concentrazione
massima
viene attivata una valvola di erogazione per aggiungere
ulteriore solvente, mentre se la concentrazione del soluto è troppo bassa
si attiva una valvola che aggiunge ulteriore soluto
Il sensore analogico ( sensore di concentrazione) comparatori azionati
dallo stesso segnale.
supponendo che ad ogni variazione di 0.01 mole corrisponda 1 milliv
Il sensore si può rappresentare elettricamente con il seguente schema
0.01 mole = 1 mv
0 mole = 0 v
0.15 = 15 mv
0,35 = 35 mv
Le due valvole per aggiungere solvente o soluto durante la lavorazione
in modo da mantenere costante la concentrazione, (la valvola per
l’erogazione e la valvola di sfogo) hanno elettronica integrata per gestire
I/O e non necessitano per cui di interfa
differenziali on arduino
ingressi analogici
Oppure
comparatore ingressi
digitali
Si supponga di voler monitorare la velocità di rotazione del motore che comanda il nastro di
carico. A tal fine, sull'albero motore viene calettato un encoder incrementale (300 impulsi/giro,
ampiezza 5 volt).
Considerando che nel ciclo di lavorazione la velocità massima del motore è pari a 1200 giri/min, si
ipotizzi una soluzione che fornisca una tensione compresa tra 0 e 10 Volt.
Riduttore ¼
piu Encoder piu amplificatore di tensione
Si vuole misurare la velocità di rotazione di un motore utilizzando un encoder. Si rappresenti il
sistema di acquisizione della velocità e ne descriva gli elementi rappresentativi motivando le scelte
effettuate.
1)progetti il circuito che fornisca il segnale corrispondente al valor medio della potenza ottica
rilevata dai due fotodiodi, nell’ipotesi che in corrispondenza del livello massimo di 15 μW di
potenza luminosa la tensione prodotta sia pari a 10 V;
con S=sensibilità spettrale =0,382 A/W,
P=potenza luminosa incidente = 9 MICROW
Iph = S·P [μA] = 9*10^-6 *0.382 = 2,538 *10^-6 A
Vph = Iph·RL [V] = 2,538*10^-6 * 10.000 = 2,538 *10^-2 v
Con 15 microw ritenendo che esista una prop lineare
S:P = S1:P1 0,382:9=S1 : 15
S1 =1,6*0,382 = 0,61
Ip = S1*P1 =0,61*15*10^-6 = 9,15 *10-6
Vph1 =Ip*Rl = 9,15*10^-6 *10000 = 9,15*10-2 v
A 0 microwatt
I = 0, V = 0
Da testo: valore medio max di potenza dei due
fotodiodi 15 microW---- 10 v
sommatore invertente che media i segnali dei due fotodiodi e untramplificatore invertente che scala la
tensione da (0 a 9,15*10-2 ) a ( 0 a 10 V)
II parte: si supponga di voler mantenere illuminata in modo costante l’area dove transitano i pezzi al fine di
compensare le variazioni dell’illuminamento ambientale A tale scopo, l’illuminatore è costituito da una barra di led
avente tensione di alimentazione 12 V e potenza di 2,5 W. Il funzionamento prevede che i led vengano pilotati in
tecnica PWM alla frequenza base di 1 kHz; il valor medio della potenza ottica è pari a 9 μW quando l’illuminazione
dell’ambiente circostante è adeguata al corretto funzionamento del sistema di visione e il Duty-Cycle del segnale
PWM è pari al 60%.
Qualora l’illuminazione ambientale dovesse aumentare, il Duty-Cycle deve diminuire e viceversa; in particolare,
per una variazione di 1 μW della potenza ottica media rilevata, il Duty-Cycle deve variare del 5%.
Si individui una idonea soluzione che consenta di mantenere costante l’illuminazione della scena,
giustificando adeguatamente le scelte operate.
f = 1 kHz duty-cycle= 600
dalla prima parte che fornisce si ricava_
10 Volt per 15uW d
9uW per 6 Volt e ad
1uW per 0,667 Volt.
La forma d’onda con le seguenti caratteristiche:
9:6 = (9-1) : x x= 5,4 v
9:6 = (9+1) : x x =6,5 v
∆V = 1,1 V
Duty cycle 60%
∆dc= 6% h
(60 *+5%*60) – (60-5%*60) =
pendenza segnale di controllo
Tg = ∆V/∆dc = 1,1/6% = 18,3 -
angolo = 86
utilizzata per pilotare l'alimentazione dell'illuminatore con la tecnica PWM utilizzando un'uscita
digitale del PLC
ACCELEROMETRO: INTERFACCIA HARDWARE
Si consideri come accelerometro una scheda fornita di cinque pin: tre di uscita corrispondenti a Vx, Vy e Vz, un
quarto per la tensione VCC e un ultimo per la tensione GND.
Le tre tensioni vanno lette mediante convertitori analogico-digitale, i quali sono presenti sulle schede Arduino
in corrispondenza dei pin A0-A5.
Le tensioni generate, in quanto analogiche, sono segnali di natura continua. I segnali che si ottengono tramite
campionamento, in quanto digitali, sono discreti e quantizzati.
Inoltre, essendo l'estremo superiore dell'intervallo di frequenze di interesse 25Hz, la frequenza di
campionamento, per il teorema del campionamento di Nyquist-Shannon, deve essere almeno pari a 50Hz, il
doppio della frequenza del segnale misurato.
Questa soglia evita che i segnali provenienti dall'accelerometro vengano distorti. Si può ragionevolmente
richiedere una frequenza di campionamento di 250Hz per garantire una misura sufficientemente fedele.
SPECIFICHE
Il tipo capacitivo (variazioni di capacità sotto effetto dell’accelerazione della massa sismica) è la tecnologia oggi
più comune mentre utilizzata per l’accelerometro.
Gli accelerometri capacitivi sono di basso costo con un rapporto segnale-rumore e risposta dinamica non
ottimale.
Una caratteristica intrinseca di tutti gli elementi capacitivi è il circuito di clock interno. La frequenza di tale
circuito è elevata (~ 500kHz) ed è parte integrante del circuito di rilevazione della corrente, sempre presente nel
segnale di uscita.
Il rumore presente è ad alta frequenza ed generale al di fuori del campo d’interesse di misura dell'accelerazione.
Grazie al suo amplificatore incorporato, i 3 fili (o 4 fili per uscita differenziale) sono la connessione ad una stabile
sorgente di tensione.
La larghezza di banda dell’accelerometro capacitivo è limitata, a qualche centinaia di Hertz a causa dello
smorzamento a gas che reaziona l’elemento per l’effetto smorzante. La struttura dell’elemento del sensore
capacitivo favorisce il basso campo di misura di accelerazione.
Il campo massimo è in genere limitato a meno di 100g. Al di fuori di queste limitazioni i moderni accelerometri
capacitivi, in particolare i dispositivi di alta qualità, offrono una buona linearità ed elevata stabilità del segnale di
uscita. Accelerometri di tipo capacitivo sono più adatti per applicazioni di monitoraggio. Sono ideali per la
misurazione del movimento a bassa frequenza dove il livello g è anche basso, come ad esempio misure di
vibrazioni nell’ingegneria civile
SPI supporta la comunicazione full-duplex con un throughput molto più alto rispetto ad I2C. non è limitato a parole
di 8 bit, in modo da poter inviare messaggi di ogni genere e con contenuti e scopi arbitrari. L’interfaccia SPI non
richiede resistenze di pull-up, il che si traduce in un minore consumo di energia. Tuttavia, I2C è più semplice
avendo meno linee il che significa che meno piedini sono richiesti per interfacciarsi ad un circuito integrato.
Quando si comunica con più di un dispositivo slave, I2c possiede il vantaggio di un indirizzamento in banda, al
posto di avere una linea chip select per ogni slave. I2c supporta inoltre lo slave acknowledgment che significa che
si è certi del dispositivo con cui si sta comunicando. Con SPI, un master può inviare dati a vuoto e non saperlo. In
generale SPI è consigliato per applicazioni che comunicano lunghi flussi di dati e non solo parole come locazioni di
memoria.
QUESITO 3
Dai diagrammi di Bode si evince che il sistema in anello chiuso non è asintoticamente stabile poiche il
margine di fase della funzione di trasferimento ad anello aperto è negativo. Infatti in corrispondenza
della frequenza di attraversamento la fase è minore di π
Detta F(s) la funzione di trasferimento a ciclo aperto sintetizziamo una rete compensatrice del tipo k*R(s)
dove
R(s) = (1 +Ts)/(1+(T/m)s) è una rete anticipatrice elementare
La funzione di trasferimento a ciclo aperto è quindi F(s) =k*F(s)*(Rs)
Essendo il modulo di 40 db circa ovvero 100, scegliendo k = 1/100 si ha un margine di fase prossimo a
zero ma positivo per k*F(s) e una frequenza di attraversamento di circa 1 Khz
Con l’aiuto dei diagrammi di fase e modulo al variare di m e ω*T di R(s) si possono determinare dei valori per
m e per ω*T che soddisfino le specifiche del problema di controllo
Si sceglie m = 10 e ω*T = 2 che, ponendo ω = 2*π*1000 hz si ottiene ω = 1/ π*1000
Ponendo la rete k*R(s) = (1/100) * (1 +(1/1000)*s) / (1 +(1/10000)*s) in cascata a F(s) si garantiscono un
margine di fase di π/4 e una banda passante non inferiore a 1 Khz
QUESITO 4
Ponendo |F(j) | < - 14 db = 10 ^(-14/20) = 1 /10^(14/20) = 0,2
s = jw = 1
F(s) = (1/(s+1)) / 1 + (k*1)/(s+1)) = 1 /(s+1+k) = 1/ (k+2)
F(dist) = 1/(1+ (k/s+1)) = (s+1) /( s + 1+ k )
= 2 /(k +2)
F(s) + F(d) < 0,2
1/(k+2) + 2/(k+2) < 0,2
k > 1,3
Scegliendo K > kmin si garantisce che l’ampiezza del disturbo additivo d(t) di natura sinusoidale con pulsazione W =
1rad/s venga ridotta di almeno di 14 db
L’AZIONAMENTO
Interfacce in uscita:
ATTUATORI
RELE con BJT per attuatori di piccola potenza (motori cc, lampade, pompe, ecc.)
CONTATTORI per attuatori di grossa potenza (motori asincrono, cc., passo passo, asincroni,
Brusless, lineari, ecc…
Motori di piccola potenza /elettrovalvole
L293 (L298 piedinatura contorta e piu potente) necessario per invertire il senso di rotazione
utilizzando l’Hardware (integrato MAX 333 con switch analogici) e non il software
Elettrovalvola: esempio di azionamento elettromagnetico, in cui il movimento del
nucleo magnetico
è utilizzato per aprire o chiudere una valvola e controllare così il flusso di liquidi o di gas in una conduttura
Le elettrovalvole si interfacciano direttamente con il micro in quanto l’elettronica è già
integrata nelle stessa valvola
Motori di grossa potenza : la regolazione della velocità si effettua inverter (CC/CA) in
corrente alternata e con convertitori CC/CC in continua
Rele
Supponendo che la tensione di 5 V resa disponibile dalla scheda non sia sufficiente per l’azionamento dei dispositivi di potenza
considerati di tipo ON-OFF (pompa e valvola di apertura) si rende necessaria un’interfaccia di potenza a relè.
La bobina viene alimentata in continua a 5 V, un contatto NO sul lato di potenza consente l’azionamento della pompa e della
valvola di apertura che rappresentano gli utilizzatori finali.
Il funzionamento è quello tipico di un relè (schema funzionale e dispositivo sono evidenziati in figura).
La figura evidenzia il funzionamento del relè; si individuano:
• la parte fissa (costituita dal sostegno e dalla bobina di eccitazione);
• la parte mobile (costituita dall’ancora o armatura);
• il contatto NO.
La bobina di eccitazione fa parte del circuito di comando, il contatto si trova nel
circuito di potenza.
Quando la bobina di eccitazione è percorsa da una corrente di valore sufficientemente elevato il nucleo si magnetizza e attrae
l'ancora verso di sé; lo spostamento dell'ancora aziona il contatto posto su lamine meccaniche che in questo caso, essendo
normalmente aperto, si chiude.
In questo caso sono i contatti dei sensori che chiudendosi determinano l’eccitazione della bobina, la chiusura del contatto e il
conseguente azionamento dell’utilizzatore.
L’impiego del relè collegato direttamente ad un micro potrebbe danneggiarlo in quanto, nel momento in cui il relè viene
eccitato, si potrebbero verificare delle sovratensioni con conseguente danno per il circuito di uscita della scheda.
Per questo motivo, in parallelo alla bobina, deve essere inserito un diodo di protezione (adesempio il diodo 1N4002) in modo
tale che le sovratensioni non ritornino verso la porta della scheda che comanda il relè.
Unmodo utilizzato per eccitare la bobina del relè senza creare inconvenienti è di isolarla galvanicamente dalla porta
interponendo un transistor BJT tra questa e la porta stessa.
Mentre il relè viene collegato al terminale di collettore, il comando del medesimo viene attuato attraverso il terminale di base
Contattori
I contattori o teleruttori sono dispositivi di manovra usati per inserire carichi di potenza (ad es. motori).
Il loro funzionamento è elettromeccanico e somiglia a quello dei relè:
•si comandano a distanza
•con circuito di comando a tensione ridotta separato da quello di potenza
•che alimentando una bobina provoca la chiusura dei contatti del circuito di potenza
•sono costruiti per eseguire moltissime manovre1)
Rispetto ai relè si distinguono perché:
•funzionano con correnti e tensioni elevate
•sono in grado di aprire anche correnti di sovraccarico
•hanno una sola posizione di riposo con i contatti di potenza normalmente aperti (NO/NA)
Oltre ai contatti di potenza i contattori dispongono di contatti ausiliari, normalmente aperti o normalmente chiusi, da utilizzare
nel circuito di comando (ad esempio per l'autoritenuta).
Il tipo, il numero e la tensione dei contatti ausiliari dipendono dal modello di contattore; nei contattori modulari è possibile
aumentare il numero dei contatti ausiliari con dei blocchi aggiuntivi opzionali che si agganciano al contattore.
Come sono fatti
Internamente il contattore è composto da:
una nucleo magnetico composto da
una parte fissa con avvolta la bobina
una parte mobile collegata ai contatti mobili (equipaggio mobile)
contatti fissi
una molla di rimando che allontana i contatti fissi e mobili quando la bobina non è alimentata
Nella figura seguente sono indicati: la bobina (1), la molla di ritorno (2), la parte mobile del nucleo magnetico (3), i
contatti mobili (4).
Caratteristiche principali
In commercio esiste una gamma molto ampia di contattori.
Per scegliere quello giusto bisogna interpretare correttamente i dati tecnici indicati nei
cataloghi. Di seguito sono elencate le caratteristiche principali per il circuito di potenza,
quello di comando e per i contatti ausiliari.
Circuito di potenza: tensione nominale (ad esempio es. 400V concatenata), corrente nominale, frequenza nominale, categoria di
impiego (ad esempio la categoria AC3 è adatta per la marcia e arresto di motori asincroni a gabbia),potere di chiusura e potere di
interruzione, durata meccanica (manovre a vuoto) ed elettrica (manovre a carico con arco sui contatti)
Circuito di comando (bobina): sistema AC o DC, tensione nominale (24V AC, 24V DC, 110V AC, ecc.), frequenza nominale, valore
che garantisce l'apertura dei contatti (in genere il 75% della tensione)
Circuiti ausiliari: numero di contatti, tipologia di contatti (NO o NC), tensione nominale, corrente (ad esempio 6A) , frequenza,
potere di interruzione
Il relè termico
Si tratta di un blocco aggiuntivo da aggiungere al contattore modulare per la protezione in caso di
sovraccarico. Il relé termico interviene quando la corrente supera la la soglia di intervento impostata facendo
commutare i suoi contatti ausiliari. Utilizzando opportunamente i contatti NO e NC del relè nel circuito di
comando è possibile ad esempio arrestare il motore e segnalare il sovraccarico accendendo una lampada.
L'intervento del relè dipende dal valore della corrente (impostabile sul relè) e dalla durata del sovraccarico
secondo la sua caratteristica di interventO
Schemi applicativi di interfaccia degli attuatori
Gli attuatori in linea di massima sono semplicemente dei normali relè a 12Vcc comandati ognuno da
un transistore pilotato da un'uscita del micro.
Per la pompa pure si utilizza il contatto del relè per abilitare o meno l'alimentazione
In base alla potenza della pompa sarà opportuno valutare di interporre un opportuno teleruttore
sulla linea Vac con protezione termica ed utilizzare il relè del nostro controllo per pilotare la bobina
del teleruttore. La pompa immersa funzionerà a tensione di rete Enel e un relè a 24V comandato da
un transistore pilotato dal micro interrompe o chiude iI circuito di alimentazione di linea della
pompa. In serie alla linea è bene prevedere ai fini protettivi un interruttore magnetotermico capace
di interrompere energia verso Ia pompa qualora ci siano assorbimenti anomali. In parallelo alla
bobina del relè è previsto un diodo per lo smorzamento delle extra tensioni generate all'apertura
del transistore
L293: PER IL COMANDO DI MOTORI IN CC , PASSO PASSO, ELETTROVALVOLE
E' un circuito integrato a 16 terminali (in contenitore DIP16) che contiene 4 amplificatori di potenza per il comando di
motori in corrente continua o passo-passo (stepper motor);
Gli amplificatori di potenza possono essere usati indipendentemente l'uno dall'altro oppure in coppia per realizzare
pilotaggi con configurazione a ponte; il controllo del funzionamento degli amplificatori viene fatto mediante livelli di
tensione compatibili TTL (H:+5V, L:0V), dunque perfettamente interfacciabili con il micro
Per ogni coppia di amplificatori è presente un ingresso di abilitazione (ENABLE) che, se posto a livello logico ALTO ne abilita
il funzionamento, se posto a livello BASSO pone gli stessi in stato di alta impedenza
L'integrato è provvisto internamente sia di una protezione termica che di una protezione contro i cortocircuiti delle uscite
verso massa; I quattro terminali centrali di massa possono essere saldati ad una apposita piazzola dimensionata per
ottenere una valida dissipazione del calore.
I diodi servono a smorzare ed annullare Ie extra tensioni inverse che nascono ai capi del motore al momento
dell'interruzione della sua alimentazione; dovranno essere scelti con velocità di commutazione veloce e di corrente anche
solo di 1A.
Pilotaggio di motori con un solo senso
di rotazione
Pilotaggio di un motore con inversione del
senso di rotazione
c) L’illuminamento
numero di apparecchi illuminanti può essere calcolato utilizzando il metodo del flusso totale
dividendo il flusso totale (dipende dall’illuminamento, dalle dimensioni del locale, dai fattori di
utilizzazione e di manutenzione) per il flusso relativo all’apparecchi scelto.
Il
Per un sito archeologico si utilizza il sistema TT impiegato per la distribuzione dell’energia
elettrica in BT alle piccole utenze civili e industriali che impegnano una potenza minore di 100
KW e non hanno una propria cabina di trasformazione.
Questi utenti devono realizzare un proprio impianto di terra. Il quadro elettrico principale deve
comprendere dispositivi di protezione come interruttori differenziali e magnetotermici
Progetto DEL BJT
1) Dimensionamento resistenza led
Per progettare la resistenza per il diodo led dal datasheet del diodo si deve ricavare da la corrente diretta massima
in entrata al diodo ( la corrente varia a seconda del colore del led ) e applicare la legge di ohm al circuito di
eccitazione del diodo
Per trovare il valore da collocare sull’ asse delle ascisse (
corrente assorbita dal diodo (id 30 mA )
R = V – Vs / Id
V = tensione con cui Vs= tensione di soglia uguale a 0.6 V Id= corrente diretta ricavata dal datasheet
R = 12 – 0.6 / 30*10^-3 = 380 ohm
2) Scelta del relè
Una volta scelto un relè per il nostro progetto in base alle necessità bisogna scoprire dai datasheet la corrente di eccitazione del
relè e nota la corrente di eccitazione del relè la utilizzo per progettare la resistenza di base e la corrente di base del transistor in
modo da ottenere sul collettore la corrente desiderata maggiore o uguale alla corrente di eccitazione del relè.
3) Scelta del BJT
Una volta scoperta la corrente di eccitazione del relè bisogna ricavare dai datasheet del Transistor BJT il guadagno del
transistor rappresentato da H21E oppure ( Ic / Ib ).
Una volta scoperto il guadagno del transistor posso calcolare la corrente di base Ib ponendo la corrente di collettore uguale
alla corrente di eccitazione del relè: Ib = Ic / = 33*10^-3 / 110 = 0.3 mA
Ottenuta la corrente di base bisogna progettare la resistenza da inserire sulla base :
Rb = Vb –Vbe / Ib = 5 – 0.6 / 0.33*10^-3 = 14Kohm
Per garantire la saturazione si aumenta la ib a 0,9 ottenendo una resistenza di 4,7 k
Se si utilizza un rele con bobina a 5 volt inserire in serie una resistenza da
R = (12-5)/80 mA = 90 ohm
L’AZIONAMENTO
Filtraggio
Campionamento
Aliasing
Fourier
filtri del secondo ordine
Esempio:
Il segnale Vout(t) in uscita ad un certo sistema elettronico è la risultante di più componenti armoniche come di
seguito rappresentate
Si determini l’ordine del filtro da utilizzare in modo da garantire un guadagno alla frequenza della prima
armonica pari a 18 dB e non superiore a -5 dB per la seconda armonica.
Si progetti quindi il sistema filtrante giustificando le scelte effettuate.
Si individui il banco di misura per testare le caratteristiche del filtro
RISOLUZIONE
Ponendo
Ponendo
Ponendo
Ponendo
k=1,
k=2,
k=3,
k=4,
per
per
per
per
la
la
la
la
frequenza
frequenza
frequenza
frequenza
della
della
della
della
prima armonica risulta:
seconda armonica risulta:
terza armonica risulta:
quarta armonica risulta:
f1 = 8 ∙ 10^3
/6.28 = 1273 hz
f2 = 8 ∙ 2^3∙ 10^3 /6.28 = 10186 hz
f3 = 8 ∙ 3^3*10^3 /6.28 = 34395 hz
f4= 8 ∙ 4^3∙ 10^3 / 6.28 = 103184 hz
Per ottenere le specifiche richieste è necessario un filtro passa basso del 2° ordine che presenta una pendenza di
40 dB/dec in quanto un filtro del primo ordine avendo una pendenza di 20 dec/decade non è in grado di
garantire le specifiche richieste:
Una decade fra f1 (prima armonica) e f2 (frequenza seconda armonica)
f1 = 8 ∙ 10^3
/6.28 =
f2 = 8 ∙ 2^3 ∙ 10^3 /6.28 =
1273 hz
10186 hz
Decade f = ∆f = log10186 – log1273 = 9.22-7.14 = 2,08
∆A= A18 – (-A5) = 18+5= 23 dB/dec > 20/dec
1) Per la frequenza di taglio si considera un valore leggermente
superiore ad f1, ad esempio 2 kHz (valore della frequnza di
taglio che si vuole imporre al filtro in modo tale che tale
frequenza (f1) risulti in banda passante, dove il guadagno deve
essere: Adb = 20 lg A
A = 10^(18/20) = 7,9
2 metodo) poiche il filtro introduce in corrispondenza della ft un
attenuazione di 3db per avere un guadagno di 18 db alla frequenza
di 1273 hz si deve introdurre un amplificatore che garantisca un
guadagno in banda piatta di 21 db (18 + 3) che corrisponde ad un
guadagno di A =10^21/20 =11, 22
1 metodo: Per dimensionare i componenti e per calcolare il guadagno si utilizzano le formule di
progetto del filtro.
Ipotizzando C=1nF si ricava:
R = 1/6,28*C*ft = 1/6,28*10^-9*2000 =80 Kohm
Poiché lo smorzamento del filtro «€», in caso di risposta di tipo Butterworth vale 0,707, per il
guadagno del medesimo si ha:
Ao = 3 − 2€=
1,59
----
Ao = = 1 + Rb/Ra
si possono considerare i valori di resistenza RA = 47 kΩ e RB = 27 kΩ.
Per ottenere un guadagno pari a 7,9 si deve impiegare amplificatore non invertente collegato in
cascata che realizzi un guadagno pari a:
Av = Vu/Vi= 7,9 /1,59 = 5
A = 1 + R2/R1
ponendo R1 = 47 kΩ si ottiene:
R2 = = (Av – 1) ∙ Ri = ( 5 − 1) ∙ 47 ∙ 10^3 = 188 KLΩ
NO Si vuole realizzare un banco di misura per testare le prestazioni di un circuito integrato avente funzione di filtro
polivalente. (risposta in frequenza)
Il circuito in oggetto presenta la seguente piedinatura:
Vin+ e Vin- sono ingressi del segnale di prova presentato in forma differenziale,
Vcc sono le tensioni di alimentazione che devono essere compresa tra 8 e 20 V,
VoLP e VoHP sono rispettivamente le uscite corrispondenti alle risposte di un
filtro passa basso e un filtro passa alto.
La configurazione prevede l’inserzione di un resistore Rf tra i pin 3 e 8 per la
regolazione della frequenza di taglio dei due filtri contenuti nell’integrato.
filtri polivalenti sono caratterizzati dal fatto che, con il medesimo circuito, si possono ottenere diverse
tipologie di risposta (passa alto, passa basso, passa banda, elimina banda). Questa caratteristica è
propria dei filtri a variabile di stato di cui un esempio circuitale (che consente di ottenere le risposte di
tipo passa alto, passa basso e passa banda) viene riportato in figura.
Dal primo stadio del filtro è possibile ottenere una
risposta di tipo passa alto, dal secondo una risposta di
tipo passa banda, dal terzo infine una risposta di tipo
passa basso. Nel caso del testo il circuito integrato
presenta due uscite dalle quali è possibile
prelevare le forme d’onda di un filtro passa basso e
di un filtro passa alto. Viene consentita la
regolazione della frequenza di taglio del filtro
attraverso un resistore esterno che potrebbe
essere a resistenza variabile
Si Per poter rilevare le principali caratteristiche del filtro viene
allestito il banco di misura rappresentato in figura; si prevede
l’impiego della seguente strumentazione essenziale: - un generatore di funzioni che produce i segnali di prova; - un
oscilloscopio a doppia traccia per analizzare le forme d’onda
prodotte dai due filtri;
- un alimentatore duale che fornisca una tensione pari a ±15 V
Il generatore di funzioni deve produrre segnali sinusoidali che presentano le seguenti caratteristiche:
- ampiezza variabile in un determinato intervallo;
- valori di frequenza compresi in un intervallo di qualche decade centrato sulla frequenza di taglio prevista in
modo da rilevare una porzione significativa della risposta.
Le principali informazioni relative al filtrosi ottengono con il tracciamento del diagramma di Bode del modulo
Dopo aver stabilito il valore di resistenza esterna e dopo aver fissato il valore dell’ampiezza del segnale
prodotto dal generatore di funzioni il procedimento di misura è il seguente:
- si modifica la frequenza imposta dal generatore di funzioni e si misura sull’oscilloscopio il corrispondente
valore di ampiezza all’uscita dei filtri e si riporta nella tabella seguente;
- - una volta compilate le prime tre colonne si calcolano, per ogni frequenza, il guadagno e il guadagno in dB
(da inserire in quarta e quinta colonna) .
-
in corrispondenza delle frequenze di taglio si determinano i valori del guadagno
Progettare un circuito che avendo in ingresso il segnale di Figura A «QUADRA» fornisca in uscita il segnale
di Figura B «SINUSOIDALE»
Poiché le due onde vin(t) e vout(t) debbono essere in fase tra loro, non è possibile utilizzare un oscillatore
sinusoidale.
Conviene ricorrere a un filtraggio di tipo passa-banda, dopo aver eliminato la componente continua, pari a 2.5
V, del segnale d’ingresso, con un traslatore di livello.
Si dovrebbe utilizzare Un passa-banda a banda stretta con elevata selettività, richiederebbe più celle filtranti
in cascata, in modo da realizzare una funzione di trasferimento di ordine abbastanza elevato.
Per brevità, si mostrerà soltanto il dimensionamento di una cella filtrante del secondo ordine.
PRIMO ORDINE TRIANGOLARE SECONDO ORDINE SINUSOIDALE
L’amplificatore differenziale è impiegato per sottrarre
dall’onda quadra Vin unipolare, indicata nella traccia
(componente continua pari a 2.5 V che rende simmetrica
l’onda quadra rispetto all’asse x)
La relazione che lega l’uscita Vo? dell’amplificatore
differenziale ai due ingressi è espressa dalla formula
Traslatore di livello da (0 a 5 v) a (-2.5 a+2,5)
Vo’ = Vi (1+ R2/R1) *(R4/R3+R4) – (R2/R1)*Vr
Con VRif = 5 V, si ha:
R1 = R4 = 20 k;
R2 = R3 = 10 k
dimensionamento del filtro:
R5 = R6 = R7 = R; C1 = C2 = C
Wo = 6.28*fo =1,44/RC
Ao = K/(4-K)
K = 1 +RB/RA
La frequenza di centro banda fo va fatta coincidere con quella dell’onda sinusoidale che si desidera
ottenere, cioè 10 Khz. Da questo valore si ottiene subito ω0, la pulsazione corrispondente, 62832 rad/s,
Si fissa
C = 10 nF non polarizzabile e si trova R = 2250 Ω (* 2.2 kΩ).
Alla frequenza di centro banda è necessario che il filtro abbia un amplificazione pari a 2, (vedere forme
d‘onda) .
Dalla formula di Ao
si ricava K = 8/3.
Si ricava infine il rapporto RB/RA, che deve risultare 5/3. Fissando RA = 27 kΩ, si ricava RB = 45000 Ω (*
serie 27 kΩ + 18 kΩ).
Oppure II progettare il filtro con tabelle di Butterword
Si consideri il circuito di figura, alimentato con ±15 V:
Il segnale onda quadra in uscita al primo operazionale
Vo1(t), la cui escursione è limitata dalla coppia di diodi
Zener, viene applicato al secondo ottenendo la tensione
finale Vo2(t). Dopo aver determinato il periodo del segnale
Vo1(t) si dimensionino i componenti dell'integratore allo
scopo di ottenere un’onda triangolare di escursione Vo2pp
= 16 Volt.
Si sceglie un astabile seguito da un integratore invertente
Tastab = 2RCln(1+B)/(1-B) = 0,256 ms
F = 1/Ta = 3909 hz
B = Rb/(Ra+Rb) = 0,778
Si inserisce una coppia di diodi zener che imita l’ampiezza a 5,5
Se la costante di tempo T = Rf*Cf dell’integratore è molto piu lunga di T/2 l’integratore si può paragonare
all’integratore ideale per il quale vale la relazione
V2pp = (Vo1/Rf*Cf) (T/2)
Ponendo T = 10 volte il semiperiodo dell’onda quadra Rf*Cf= 10 *T/2 =0.001279 fissando Cf = 33 nf si ottiene
Rf = 38, 5k
Ponendo Vo1 = 5,5 v eVo2 = 16 V si ricava Ri = 1332 ohm
L’AZIONAMENTO
Scelta dei motori in funzione del peso da movimentare
-
Fasi di funzionamento di un MAT
Scelta per un sistema di trasporto
PWM
MAT per barriera mobile
Descrizione del funzionamento (miscelatore)
Avviamento stella triangolo (riduzione della Is)
MOTORI È necessario gestire il ciclo di funzionamento di un motore asincrono trifase a 4 poli e funzionante alla
frequenza di rete. L’avviamento avviene mediante un pulsante di start, la velocità del motore aumenta in modo
graduale fino a raggiungere il suo valore massimo dopo 15 secondi e tale velocità va mantenuta per 30 secondi,
dopodiché il motore comincia a decelerare fino ad arrestarsi completamente dopo 15 secondi.
SI DISCUTA le problematiche relative alla fase di avviamento del motore e proponga le modalità di gestione del
suddetto ciclo di funzionamento
Fase di avviamento
Nella fase che segue l’avviamento gli avvolgimenti di un motore sono sottoposti a tensione ma la velocità è ancora nulla. In questa fase, detta
di cortocircuito, il motore assorbe un’elevata corrente di spunto; l’energia assorbita, non potendo ancora convertirsi in energia meccanica, é
quasi totalmente convertita in calore per effetto Joule. Con l’avviamento del rotore la corrente si riduce fino ad assumere il valore nominale in
corrispondenza di una velocità vicina a quella massima.
La corrente del motore ha un transitorio iniziale di pochi ms dovuto alla bassa impedenza apparente nell’istante di avviamento. In questo breve
intervallo la corrente istantanea può giungere ad un valore venti volte superiore a quello nominale. I ritardi di funzionamento delle protezioni
devono essere tali da non provocare il loro intervento e da fare in modo che il transitorio si esaurisca senza danni.
Superata tale fase la corrente di spunto può assumere valori che vanno generalmente dalle sei alle otto volte il valore della corrente nominale.
Per la protezione si possono utilizzare due dispositivi distinti, il fusibile e il relè termico, che proteggono rispettivamente contro cortocircuiti e
sovraccarico termico.
Il relè termico si rivela adatta per la protezione del motore alle basse correnti. Oltre un certo limite il relè termico rischia la distruzione e subentra
quindi il fusibile, il cui campo di protezione può spingersi a correnti superiori per giungere fino a quella di cortocircuito.
Ciclo di funzionamento
I tipi di servizio delle macchine vengono stabiliti dalla Norma CEI 2-3. Per MAT è prevista una sequenza di cicli di funzionamento
identici, ciascuno comprendente una fase di avviamento, un periodo di funzionamento a carico costante, una fase di frenatura elettrica
rapida e un periodo di riposo.
La variazione di velocità viene ottenuta variando di frequenza con un
convertitore statico di frequenza «inverter» che trasforma una corrente cc
in ca
Il valore della frequenza in uscita può essere scelto dall’operatore in relazione alla
velocità di funzionamento che si vuole far raggiungere al motore.
Per mantenere inalterate le caratteristiche meccaniche nominali del motore come la
coppia è però necessario garantire un flusso magnetico il più possibile costante e vicino
al valore stabilito dal costruttore; questa condizione si ottiene mantenendo il più costante
possibile il rapporto V/f tra la tensione che alimenta il motore (che influisce sulla coppia)
e la frequenza stessa
La zona oltre la frequenza nominale viene denominata zona a potenza costante per distinguerla dalla zona a coppia
costante prima della frequenza nominale. Con l’inverter è possibile ottenere velocità maggiori rispetto a quella di targa
generando frequenze maggiori di 50 Hz ma da tale punto in poi, non essendo più possibile aumentare la tensione, si ha
come conseguenza un progressiva diminuzione della coppia motrice.
gestione del suddetto ciclo di funzionamento con PLC
Analisi dei parametri da cui dipende la velocità di un motore trifase con modulazione della velocita attraverso inverter
e tecnica PWM , PWM (Pulse Width Modulation).
In un motore asincrono trifase la velocità di sincronismo in rpm è data da:
𝑣0=60∗(𝑓/𝑝)(1−𝑠)
Dove 𝑓 è la frequenza dell’inverter, 𝑠 è lo scorrimento e 𝑝 è il numero di coppie di poli del motore.
La velocità dipende dal numero di coppie di poli, dallo scorrimento, dalla frequenza
dell’alimentazione dello statore ma anche dai parametri magnetici del motore e dalla corrente
media che scorre nell’avvolgimento di statore.
La corrente di statore infatti è responsabile per la presenza dei flussi di campo magnetico la cui
variazione determina la rotazione del rotore.
Variare la tensione media d’uscita dell’inverter comporta anche la variazione della corrente d’uscita
media.
La tecnica PWM consiste nel modulare il duty cycle dell’onda quadra in uscita all’inverter attraverso
la comparazione di un segnale di controllo (alla frequenza di funzionamento del motore) con un
riferimento di tensione fisso
Variare il riferimento in questa situazione significa variare il
duty cycle proporzionalmente a tale variazione.
Il motore elettrico che muove una barriera mobile
Si puo' ipotizzare di indicare qui la parte di
potenza di un motore asincrono trifase, azionata
con teleruttore contattore comandato a distanza
da un PLC oppure da una logica di comando
elettromeccanica.
descrivere il funzionamento di un motore asincrono che aziona un miscelatore
caratteristiche in relazione al carico meccanico collegato al motore.
illustrandone la curva
Il motore asincrono trifase viene alimentato da un sistema di tensioni trifasi cioè tre tensioni
che sono sfasate tra di loro di 120°.
La tensione di alimentazione del sistema trifase è di 400 V in valore efficace, alla frequenza f =
50 Hz.
La parte fissa del motore è detta statore; la parte che può ruotare è detta rotore. Sulla parte fissa
del motore, si trovano tre bobine doppie, le quali vengono disposte l’una rispetto all’altra di 120° e
che attraversate da correnti sfasate di 120 generano un campo magnetico rotante
Il rotore non ruota a una velocità costante, cioè la velocità di sincronismo, ma rallenta al variare del
carico; per cui il motore non è detto sincrono ma asincrono, cioè non rispetta la velocità di
sincronismo imposta dallo statore.
La caratteristica meccanica si può rappresentare in funzione dello
scorrimento (per s uguale a 1 -> motore fermo; per s = 0 velocità
è la massima),
Quando il motore gira con velocità elevata, cioè prossima alla velocità
di sincronismo ns, la coppia è molto elevata; in tal caso lo
scorrimento è quasi nullo.
il tratto 0-a è un tratto stabile; all'aumentare del carico aumenta lo
scorrimento, e quindi il motore rallenta, ma aumenta pure la coppia
motrice, per cui il motore asincrono è in grado di sopportare
l'aumento di carico meccanica
Il tratto a-b, è un tratto instabile; infatti, in tale tratto se aumenta il
carico meccanico il motore rallenta fino a fermarsi in quanto la coppia
diminuisce
Un motore asincrono trifase a 2 poli presenta i seguenti dati di targa:
potenza Pn = 4 kW
frequenza fn = 50Hz
tensione Vn = 400 V
velocità Nn = 2890 rpm
corrente In = 8,3 A
fattore di potenza cosφn = 0,81
All’avviamento il motore produce una coppia pari a 48,1 Nm e assorbe una corrente pari a 7 volte la corrente di pieno
carico.
Si discuta come ridurre la corrente di spunto, si scelga il dispositivo idoneo a realizzare tale riduzione e si valuti come
varia la coppia di avviamento nelle nuove condizioni
AVVIAMENTO STELLA TRIANGOLO: Questo avviamento viene realizzato per motori
che sono alimentati, a regime, con collegamento a triangolo.
Ad esempio, un motore con dati di targa 220/380 V, se viene alimentato dalla linea
trifase a 220V deve avere il collegamento a triangolo, da realizzare nelle condizioni
normali di funzionamento.
Solo in tal caso si può effettuare l’avviamento Y- Δ, che significa una partenza con
avvolgimento predisposto a stella e, successivamente all’avvio, il passaggio al
definitivo collegamento a triangolo
La riduzione della corrente di spunto viene effettuata, sempre a parità della
tensione di rete Ul, collegando inizialmente gli avvolgimenti a stella
Al raggiungimento di una certa velocità del motore si effettua la commutazione a triangolo
Ogni bobina dell’avvolgimento risulta ora alimentata alla tensione concatenata Ul della rete trifase, cioè alla
tensione 1,73 volte maggiore della precedente.
Avviando il motore con il collegamento a stella esso assorbe dalla linea una corrente ridotta di 1/3 rispetto
a quella che avrebbe assorbito avviandolo subito a triangolo.
La coppia di spunto, legata praticamente al quadrato della tensione, risulta anch’essa teoricamente ridotta
di 3 volte rispetto alla coppia che lo stesso motore fornirebbe, avviato a triangolo.
L’AZIONAMENTO
APPLICAZIONI
controllo potenza Funzionamento
IGBT
Differenze fra SCR e TRIAK
Circuiti smorzatori (snubber)
Il circuito seguente utilizza componenti elettronici per regolare la potenza erogata al carico
(Load) con una tecnica chiamata controllo di fase. Si descriva il funzionamento indicando
come avviene la regolazione e tracciando le forme d’onda più significative. Si illustri anche la
funzione della serie RC, nel ramo tratteggiato, specificando quando e perché va inserita.
RC per carichi induttivi (smorza le brusche variazioni di tensione limitandole anche in ampiezza)
Si illustri il principio di funzionamento dei dispositivi IGBTm se ne discuta vantaggi e svantaggi in rapporto alle
caratteristiche dei MOSFET e BJT; inoltre si fornisca un esempio di possibile applicazione nell’ambito del controllo
di velocità dei motori.
La sigla IGBT significa Insulate Gate Bipolar Transistor. E’ un componente che nasce dall’idea di raccogliere in se le migliori
proprietà di due componenti separati, il BJT (che ha una buona caratteristica di conduzione) e il MOSFET (che ha delle buone
caratteristiche in termini di velocità di commutazione e di pilotaggio). Lo scopo viene raggiunto mediante la realizzazione di
una struttura a transistor BJT di tipo PNP in configurazione Darlington in cui il transistor pilota viene sostituito da un MOSFET
a canale N; lo stadio d’ingresso è in definitiva costituito da un MOSFET, lo stadio d’uscita da un BJT. La sua caratteristica è un
ibrido tra quelle dei componenti da cui deriva. Le caratteristiche d'uscita sono uguali a quelle di un transistore bipolare, però è
controllato in tensione come il MOSFET.
Quanto la tensione è applicata tra gate ed emettitore, la capacità
equivalente d'ingresso si carica attraverso il resistore di gate fino
a una tensione di soglia che fa accendere l'IGBT; viceversa,
quando la capacità tra gate ed emettitore si scarica, l'IGBT torna
nello stato di off
Essendo l’IGBT un dispositivo a tensione controllata richiede solo una piccola tensione sul gate per mantenere la conduzione
attraverso il dispositivo a differenza dei BJT che richiedono che la corrente di base sia continuamente alimentata in quantità
sufficiente a mantenere la saturazione.
L’IGBT è un dispositivo unidirezionale a differenza dei MOSFET che hanno capacità di commutazione di corrente in maniera
bidirezionale; la corrente circola in una sola direzione, dal collettore verso l’emettitore.
L’impiego degli IGBT è legato in particolare al controllo dei motori a velocità variabile, al controllo di trazione, agli schemi per
inverter e alimentatori. (esempio piu avanti)
Si illustri le differenze tecnologiche e di funzionamento tra SCR e TRIAC anche tramite esempi
applicativi
Un triac corrisponde a due Scr in antiparallelo, cioè con il catodo di uno collegato all'anodo dell'altro. Il controllo
può avvenire con un solo dispositivo per entrambe le semionde. Il triac, più flessibile, è utilizzato in genere
per applicazioni domestiche. Quindi di potenza relativamente ridotte.
L'Scr è adatto ad applicazioni anche industriali e può controllare potenze rilevanti e correnti di centinaia e
centinaia di ampere
Si consideri un sistema di interruttori elettronici di potenza, si illustri le principali problematiche
che si possono rilevare nel momento della commutazione degli interruttori e giustifichi la necessità
di utilizzare un circuito smorzatore da associare ai suddetti interruttori
Si ha Necessità di inserire circuiti di protezione «snubber» per interrompere correnti di natura induttiva
L’accensione e lo spegnimento di un dispositivo elettronico non è mai ideale: la presenza di fenomeni parassiti
(recovery di diodi interni “capacità del diodo di generare impulsi brevi”, induttanze parassite) causano picchi di
vario tipo su tensione e corrente.
I circuiti di snubber fungono da limitatori per implementare commutazioni smorzate (soft switching) per
smorzare eventuali fenomeni elettrici critici che sono conseguenza della commutazione del circuito e possono
mettere a repentaglio gli elementi del circuito stesso.
Tipicamente, gli snubber operano come:
•limitatori di sovracorrente all’accensione;
•limitatori di sovratensione allo spegnimento;
•limitatori di stress durante il funzionamento (per impedire che V e I siano contemporaneamente elevate, e
quindi la potenza
sia alta).
•Snubber RC. Protegge diodi e tiristori: limita la sovratensione
•Snubber RC con condensatore polarizzato. Modifica le
forme d’onda ammorbidendole
favorendo lo
spegnimento
degli interruttori. Mantiene le tensioni applicate ai dispositivi a livelli di sicurezza, limitando anche la variazione
di tensione allo spegnimento.
L’AZIONAMENTO
APPLICAZIONI
Azionamento
Inverter
Convertitore Fly-back
Controllo MAT
Controllo PWN
- Controllo a catena chiusa
- Regolazione velocità
Nell’ambito del controllo di velocità dei motori trifase viene impiegato il dispositivo il cui schema
elettrico è rappresentato in figura. Si individui il dispositivo e ne illustri il funzionamento nelle sue
parti essenziali, con particolare riguardo alle modalità con la quale avviene la rigenerazione del
segnale trifase che alimenta il motore asincrono ad esso collegato.
L'inverter VSI six-step è costituito da:
- un raddrizzatore a ponte trifase totalcontrollato ad SCR lato rete
che raddrizza la tensione e ne regola il valore medio;
- un filtro L-C nel circuito intermedio, con una batteria di
condensatori di elevata
capacità per livellare la tensione
raddrizzata e fornire una via per le
correnti rapidamente
variabili prelevate dall'inverter;
- un inverter lato motore, costituito da tre lati in ognuna delle
quali sono
disposti due interruttori funzionanti in modo
complementare, che fornisce una terna simmetrica di tensioni
concatenate in onda quadra
Il funzionamento di tale inverter consiste nel mantenere in stato di conduzione per metà periodo
uno dei due interruttori di un lato e per l'altra metà l'altro interruttore; in modo analogo ma
sfasati nel tempo sono fatti funzionare gli interruttori dei altre due lati.
Il circuito illustrato nella figura successiva viene impiegato in molti dispositivi sia in ambito civile che
industriale. Dopo aver individuato di quale circuito si tratta se ne illustri il funzionamento nelle sue parti
essenziali, approfondendone pregi e difetti.
La configurazioni in esame e quella di un convertitore flyback. La fase di conduzione o stato ON,
dura T fase di interruzione o di interdizione o stato OFF è istantanea
Quando il commutatore è acceso, VDRAIN è vicino a zero volt e la corrente, IP, passa attraverso
l'avvolgimento primario del trasformatore. L'energia viene immagazzinata nell'induttanza
magnetizzante del trasformatore. Questa corrente aumenta linearmente col tempo. Sul lato
secondario il diodo in serie è polarizzato in senso inverso e nel secondario non scorre corrente.
L'energia immagazzinata nel condensatore di uscita fornisce corrente all'uscita.
Quando il commutatore MOSFET è spento, l'energia immagazzinata nel trasformatore viene immessa
attraverso il diodo nel condensatore di uscita e nel carico in uscita. La corrente secondaria inizia con
un valore elevato e diminuisce linearmente.
S Se la corrente secondaria scende a zero prima che il commutatore venga riacceso, l'alimentazione viene definita alimentazione in modalità
corrente discontinua (DCM). e la corrente secondaria non scende a zero, l'alimentazione viene detta in modalità di corrente continua (CCM). Poiché
l'energia immagazzinata nell'induttore viene interamente scaricata a ogni ciclo di commutazione, l'alimentatore DCM può utilizzare un trasformatore
più piccolo. Inoltre, l'alimentazione è generalmente più stabile e produce EMI inferiori.. L'energia immagazzinata nell'induttanza di
dispersione del trasformatore scorre nel primario quando il commutatore si spegne ed è assorbita dal morsetto di
ingresso o dal circuito "soppressore « presente nel circuito di controllo , la cui funzione è proteggere l'interruttore a
semiconduttore da tensioni induttive elevate. La potenza viene dissipata solo durante le transizioni del
commutatore tra gli stati "On" e "Off".
Controller/regolatori
Il dispositivo di commutazione, come il MOSFET nel diagramma (ancora Figura 2), è azionato da un controller o da
un regolatore della modalità di commutazione. Nella maggior parte dei casi il controller applica una forma d'onda
modulata a larghezza di impulso (PWM) all'elemento di controllo del commutatore, che per i MOSFET è il gate.
L'uscita dell'alimentazione è accoppiata indietro al controller, che varia il ciclo di lavoro del segnale del gate driver
per mantenere una tensione di uscita costante. In questo modo, il controller forma un sistema di controllo ad anello
chiuso intorno al convertitore flyback. I controller possono anche gestire diverse funzioni ausiliarie, come la
protezione dell'alimentazione da sovraccarichi, sovratensioni o condizioni di linea bassa. Possono anche gestire
l'avviamento dell'alimentazione per assicurare una entrata in servizio ben controllata (senza problemi), riducendo
al minimo i transitori iniziali di tensione e corrente.
Un esempio applicativo tipico degli IGBT è nei convertitori di frequenza utilizzati per regolare la velocità dei motori asincroni trifase.
Nel raddrizzatore la corrente alternata è convertita in corrente continua pulsante tramite un ponte trifase non controllato; la corrente viene
livellata dal condensatore posto tra raddrizzatore e inverter; l’inverter regola la tensione e la frequenza d'uscita. I componenti principali
dell’inverter sono sei IGBT suddivisi in coppie disposte su tre rami; gli IGBT controllano la tensione regolata in uscita dal circuito intermedio
tramite PWM. Gli IGBT sono alimentati e controllati dai driver integrati nel circuito di potenza.
Nell’ambito del controllo di potenza dei motori in alternata tramite dispositivi allo stato
solido, il controllo di fase rappresenta una delle tecniche largamente utilizzate. Se ne
illustri le possibili implementazioni
fornendo i relativi schemi e dettagliandone il
funzionamento.
Il controllo di fase o parzializzazione di fase (taglio di fase) è un sistema per variare il valore efficace della
tensione sul carico (utilizzatore), e come conseguenza, la potenza assorbita.
Componente determinante per ottenere tale funzionamento è il TRIAC(interruttore elettronico)
Tale dispositivo viene utilizzato per controlli di piccola potenza (corrente regolabile di 40A) mentre per potenze
superiori vengono utilizzati due SCR (diodi controllati o tiristore) collegati in antiparallelo
Il principio di funzionamento di un controllo simmetrico (l’angolo di conduzione α deve essere uguale sia nella
semionda positiva che in quella negativa) è rappresentato nella fig. A .
La sezione di potenza, rappresentata dal TRIAC, è comandata da una sezione di controllo comprendente
l’elettronica di segnale.
Il controllo, sincronizzato con la rete, permette di variarre l’angolo di conduzione a del TRIAC determinando il
valore di tensione desiderato sul carico.
Il sistema a controllo di fase è caratterizzato da un elevato rapporto del Δi/Δt (notevole variazione di corrente in un intervallo di tempo breve) nel
momento dell’entrata in conduzione del TRIAC o SCR, provocando una notevole produzione di segnali interferenti(radiodisturbi) ed inquinamenti
nella rete di alimentazione dell’energia elettrica(disturbi in rete). Con opportuni filtri è possibile ridurre questi fenomeni riportandoli entro limiti
definiti dalle normative.
Al fine di avere una corretta utilizzazione dei variatori è opportuno conoscere i limiti di funzionamento imposti dal tipo di
Carico fornite dai costrittori del regolatore ( CARICHI RESISTIVI (OHMICI) - CARICHI INDUTTIVI - TRASFORMATORE
BOBINE, ELETTROVALVOLE, GIUNTI MAGNETICI, VIBRATORI MOTORI UNIVERSALI (con collettore) - MOTORI ASINCRONI (rotore a
gabbia) - VENTILATORI CON MOTORI ASINCRONI – CARICHI CAPACITIVI,: eccesso di corrente assorbita, diminuzione della coppia, potenza
minima controllabile ecc..)
Si spieghi la tecnica Pulse Width Modulation (PWM) applicata motore
Controllo velocità in modo automatico
in
CC a
magnete permanente per il
1 Controllo lineare
Un semplice schema di amplificatore in funzionamento lineare adatto
controllare la velocità di un motore è quello illustrato in figura
a
Nello stato ON del BJT sul motore viene applicata una tensione di armatura pari
a Va= Vcc - VcE(sat)
che ne provoca la rotazione, mentre nello stato OFF la
corrente viene interrotta ed il motore cessa di essere alimentato.
Il diodo di libera circolazione posto in antiparallelo al motore riduce le pericolose
sovratensioni ai capi del BJT, provocate nella commutazione ON- OFF dalla componente
induttiva del motore.
Con questa tecnica non è però possibile né regolare né controllare la velocità di rotazione
del motore.
La configurazione è quella ad inseguitore di emettitore; la tensione di ingresso Vi regolata tramite il
potenziometro,viene trasferita, a meno della VBE del BJT, sull'armatura del motore, controllandone così la
velocità.
L'ingresso deve solo fornire la corrente di base, mentre la corrente di armatura, ben più elevata, viene
erogata attraverso il BJT dall'alimentazione. Per ridurre il valore della corrente di base, spesso al semplice
BJT si sostituisce una configurazione Darlington.
2 Controllo in PWM
Un inconveniente del controllo di velocità lineare consiste nel fatto che il transistore che pilota il motore è
chiamato a dissipare una notevole potenza, specie alle basse velocità, abbassando così il rendimento del
sistema, inteso come rapporto fra la potenza fornita al motore e la potenza erogata dall'alimentazione.
Questo inconveniente viene superato facendo lavorare il transistore in regime impulsivo, ossia in
commutazione. In questo caso infatti la dissipazione di potenza è di molto inferiore, poiché si verifica o
nella fase in cui il transistore è in saturazione, e quindi con bassa tensione ai suoi capi, o nella fase di
commutazione, normalmente molto breve.
In particolare la tecnica di controllo basata sulla modulazione a larghezza dì impulsi (PWM: pulse width
modulation) consente un efficace controllo della velocità del motore
Quest'ultimo viene alimentato con una tensione di armatura va che, anziché continua, a un andamento
rettangolare o impulsivo, con ampiezza vam periodo T costante e ciclo dì utilizzo (duty cycle) variabile.
La frequenza della tensione di alimentazione viene scelta da qualche kHz in su, preferibilmente
intorno ai 20 kHz o più, onde evitare la generazione e la diffusione, attraverso i conduttori di
alimentazione e la carcassa del motore, di rumore nella gamma delle frequenze udibili.
Tenendo presente che il polo dominante e quindi la frequenza di taglio della funzione di trasferimento del
motore dipendono sostanzialmente dalla costante di tempo meccanica (|p|= 1/τm) e che la frequenza della
tensione di armatura è normalmente di molto superiore alla frequenza di taglio, si comprende come
soltanto la componente continua Vam produca effetto sul numero di giri, mentre le armoniche vengano in
pratica tagliate.
Lo stesso discorso è valido anche per la corrente di armatura, anche se in questo caso la frequenza dì taglio
dipende dalla costante elettrica τe ed è pertanto più elevata.
In altre parole il motore, sia per la velocità che per la coppia resa, sente sostanzialmente il valore medio
Vam della tensione di armatura, che a sua volta dipende dal duty cycle secondo la relazione
Vam = (ton/T)Vam
Pertanto, riferendosi alla grafico del duty cycle è come se al motore venissero applicate tensioni di armatura
continue rispettivamente pari a 0,5 Vam 0,75 Vam e 0,25 Vam
3 Regolatore di velocita
Un circuito di regolazione della velocità in PWM può essere quello in figura
Un comparatore confronta la tensione di regolazione in ingresso Vi con una
tensione Vos a denti di sega di frequenza costante, generata da un oscillatore.
L'uscita Vo del comparatore è allora un'onda rettangolare di frequenza
costante e duty cycle variabile con Vi
Un aumento di vi produce così un aumento del duty cycle di Vo e quindi un
aumento del valore medio della. tensione di armatura del motore, che si
traduce a sua volta in un aumento della velocità
L'effetto opposto viene prodotto da una diminuzione di Vi
4 Controllo di velocità ad anello chiuso.
Il circuito
esaminato essendo ad anello aperto,
non consente un'autoregolazione della
velocità; questa importante caratteristica è invece presentata dal circuito ad anello chiuso
in figura
Un amplificatore dì errore sente la differenza fra una
tensione di riferimento Vi e la tensione di reazione Vf
generata da un tachimetro collegato al motore, producendo
in uscita una tensione di errore Ve
Se, per un aumento della coppia di carico applicata al
motore o una diminuzione della tensione di alimentazione,
diminuisce la velocità del motore, cala anchela tensione Vf
prodotta dal tachimetro, cresce di conseguenza Ve e quindi
aumenta il duty cycle dell'uscita Vo del comparatore.
L'aumento conseguente del valore medio della tensione dì armatura tende così a contrastare la diminuzione
iniziale di velocità. L'inverso succederebbe se la velocità del motore tendesse ad aumentare.
Questo circuito riporta un circuito, in linea di principio, che permette il controllo di velocità in PWM, con anello
di retroazione per la stabilizzazione della stessa.
Questo circuito permette di variare, tramite il valore di VI, la tensione media del motore e, quindi, la sua
velocità. La presenza della dinamo tachimetrica garantisce la stabilizzazione della velocità, prefissata tramite il
valore di VI.
Tra gli integrati appositamente previsti per il controllo in PWM dei motori in DC, si ricorda in particolare lo L292
della ST Microelectronics, che è capace di lavorare con tensioni tra 18 e 36 V, con una corrente massima di 2 A
(senza aggiunta di dispositivi di potenza esterni).
dopo aver discusso da quali parametri dipende la velocità di un motore trifase si descriva, dettagliandone gli aspetti
principali, l’impiego dell’inverter per la modulazione della velocità con particolare riferimento alla tecnica PWM (Pulse Width
Modulation).
In un motore asincrono trifase la velocità di sincronismo in rpm è data da:
𝑣0=60∗(𝑓/𝑝)(1−𝑠)
Dove 𝑓 è la frequenza dell’inverter, 𝑠 è lo scorrimento e 𝑝 è il numero di coppie di poli del motore.
La velocità dipende dal numero di coppie di poli, dallo scorrimento, dalla frequenza dell’alimentazione
dello statore ma anche dai parametri magnetici del motore e dalla corrente media che scorre
nell’avvolgimento di statore.
La corrente di statore infatti è responsabile per la presenza dei flussi di campo magnetico la cui variazione
determina la rotazione del rotore. p
Variare la tensione media d’uscita dell’inverter comporta anche la variazione della corrente d’uscita
media.
La tecnica PWM consiste nel modulare il duty cycle dell’onda quadra in uscita all’inverter attraverso la
comparazione di un segnale di controllo (alla frequenza di funzionamento del motore) con un riferimento
di tensione fisso
Variare il riferimento in questa situazione significa variare il
duty cycle proporzionalmente a tale variazione.
Si descriva come è possibile effettuare la regolazione della velocità delle pale del sistema di miscelazione azionate da un MAT
Si alimenta il motore con un inverter controllato con tecnica PWM
Con la tecnica PWM (Pulse-Width Modulation) costruisce una forma d’onda molto prossima alla sinusoide
Gli impulsi che vengono generati hanno ampiezza costante, ma larghezza variabile. In base all’ampiezza di un’onda sinusoidale si determina la
larghezza dell’impulso.
Gli istanti di chiusura e apertura degli interruttori elettronici del convertitore (transistori, gto, mosfet) vengono imposti in modo da ottenere la
fondamentale voluta ed eliminare le armoniche indesiderate, mediante l’impiego di un calcolatore in linea o di una elaborazione memorizzata in
precedenza e richiamata al momento opportuno.
Più alta è la frequenza della portante «segnale triangoalre», minore risulta il contenuto delle armoniche della tensione generata dal convertitore.
La modulante è in genere prodotta nel blocco di controllo del sistema, di cui il convertitore è sostanzialmente l’amplificatore di potenza che
produce tensione di uscita variabile sia in ampiezza, sia in frequenza.
Ciò consente di utilizzare il motore trifase sia a coppia costante (controllo U-f), sia a potenza costante (controllo di frequenza e modulo della
tensione costante).
Nei sistemi di controllo si adottano spesso inverter alimentati da generatori di corrente, anziché dai generatori di tensione citati sopra. Sul carico
viene quindi iniettata e controllata una corrente, variabile in ampiezza e in frequenza.
L’azionamento a corrente impressa consente elevate prestazioni dinamiche del sistema controllato.
Applicazioni
Trasmissione meccanica
RIDUTTORE DI GIRI
Esercizio:
Un riduttore ( R = 0.08, = 0.98 ) è azionato da un motore elettrico con coppia 4 Nm e velocità 95 rad/s.
Calcolare la coppia C2, la velocità ω2, le potenze P1 e P2.
Soluzione:
w2 = R*W1 = 0,08*95 = 7.6 rad/s
C2 = C1/R) = 0,98*(1/0.08)*4 = 49 Nm
In alternativa
P1 = C1*w1 = 4*9 =
380 W
P2 = C2*w2 = 49*7,6 =
372,4 W
P2 = P1= 0,98*380 = 372,4 w
RIDUTTORE DI GIRI
Esercizio:
Dimensionare la potenza che un motore deve erogare a regime a un riduttore di giri (con R = 1/25 = 0.04,
= 0.95) che aziona un carico alla velocità di 1500 g/min con coppia di 60 Nm.
Soluzione:
w1 = n*(2*3.14/60) = 1500*(2*3.14/60) = 157 rad/s
Pc = Cc*w2 = 60 * 157 = 9425 W
P = Pc/ 9425/0,9 9921 W
RIDUTTORE DI GIRI
Esercizio:
Dimensionare il rapporto di riduzione di un riduttore che deve far ruotare un carico alla velocità di 18 rad/s quando
azionato da un motore elettrico che eroga una coppia di 6 Nm alla velocità di 3000 g/min.
Ipotizzando un riduttore ad alto rendimento ( ~ 1 ), calcolare la potenza assorbita dal carico.
Soluzione:
w1 = n*(2*3.14/60) = 3000*(2*3.14/60) = 3124 rad/s
R = w2/w1 = 18 /314 = 0,057
Ccar = Cmpot/R = 6/0,057 = 105 Nm
Pc = Cc*w2 = 105*18 = 1885 w
TRASMISSIONE MECCANICA
Esercizio:
Una vite a ricircolo di sfere ( con R = 0.002 m/rad, = 0.98) è azionata da un motore che gira alla
velocità di 1500 g/min e muove un carico di 70 N.
Calcolare:
•la velocità del carico vc
•la potenza assorbita dal carico PC
•la potenza erogata dal motore PM
Soluzione:
w= n*(2*3.14/60) = 1500*(2*3.14/60) = 157 rad/s
vc = Vcm =R*w = 0.02*157 = 0.314 m/s
Pc = vc *F 0.31470 22 W
Pe = Pc/ 22/0.98 22.4 W
TRASMISSIONE MECCANICA
Esercizio:
Dimensionare la potenza di un motore elettrico che aziona una vite a ricircolo di sfere (con R = 0.004
m/rad, = 0.96) che muove un carico alla velocità di 1.5 m/s sviluppando una forza di 16 kgp.
Soluzione
Fc = 16kgp = 16*9.8 N = 17 N
Pc = F*v = 157*15 = 236 W
Pm = Pc/ 236/0.98 246 W
Esercizio
un riduttore deve azionare il tamburo di un argano di sollevamento.
La coppia di tamburo a regime è CT= 50 [Kgf*m] e nT= 75 [giri/1’].
Considerando il rendimento del riduttore =0,90 scegliere il tipo di motore.
Svolgimento:
Scegliendo un motore a 4 poli (p=2)
ns= 60*f/p = 60*50/2 =1.500 [giri/1’]
Considerando in prima approssimazione nr= 1.400 [giri/1’]
il rapporto di trasmissione i=1400/75= 18,67
e la coppia motrice Cm= Ct/(i*ղ )= 50/(18,67*0,9)= 2,98 [Kgf*m]
Il motore scelto è MV132 Sg 4 con Cnom= 3,58 [Kgf*m]
Installazione per pompe centrifughe e ventilatori
Per essi si sceglierà il motore in base alla potenza; le portate e le prevalenze ( max altezza a cui la pompa è in grado
spingere l’acqua ) saranno quelle relative ai diagrammi delle pompe e dei ventilatori al numero di giri nominale del motore.
Esercizio:
una pompa centrifuga richiede la potenza di
2,7 [KW] a 1.400 giri per sollevare 80 [m3 /h] di H2O a 7,5 [m]
Svolgimento:
il motore a 4 poli scelto è MV100L4 con dati nominali pari a 3[KW]-1420 [giri/1’]
attrito volvente
Si calcoli la potenza meccanica di un motore asincrono trifase installato nell’argano, supponendo che il peso
dei pezzi da sollevare non superi i 20 kg, che i pesi della fune e dell’elettromagnete siano trascurabili, che al
motore sia collegato un riduttore avente rapporto 1:20 e rendimento 0.5 e sul cui albero di uscita sia
montata una puleggia del diametro 100 mm.;
P = 20 Kg
V = 1200 g/s
Braccio = d/2 = 100/2 = 50 mm 0.05 m
Momento torcente
M =
F*b =
20*0.05 = 1 Kgm
w = 2*π *n /60 = 6.28* 1200/ 60 =
125,6 rad/s ∙
Pr = M*w =1 * 125,6 = 1500 kgm*rad/s
(moto traslatorio Pr = F x v)
Pmecc =Pr* η * ρ= 125,6* 0.5* 20 = 1.256 watt ( moto rotazionale)
(attrito radente)
2. Si calcoli la potenza meccanica che deve essere applicata all’albero del rullo di traino che
comanda il nastro trasportatore considerando che:
a.il nastro trasportatore orizzontale avanza alla velocità costante di 300 mm/sec;
b.i rulli di traino e di rinvio hanno diametro pari a 50 mm;
c. il coefficiente di attrito tra tappeto e piano di trasporto è pari a 0.3;
d.il peso totale trasportato dal nastro è pari a 150 N.
Si considera una massa complessiva (massa nastro + massa peso portata consentita di 150 N che
rappresenta il peso totale che si scarica sui rulli
------------------------------------------------------------------------Per prima cosa si determina la forza di trazione F (tangenziale)
F=coeff. attr.*P=0.3*150=45 N
Si calcola la velocità angolare w
w=v/r=300*10^-3/25*10*-3= 12
rad/s
la coppia minima per muovere il nastro
C=F*r= 45N*0.025m= 3,75 Nm
la potenza minima richiesta dal motore sarà
P= C * w = 3,75 * 12 rad/s = 45 W
attrito radente
Dimensionare la potenza del motore per l’azionamento dei nastri trasportatori considerando che:
a. la massa totale per unità di lunghezza è pari a 1080 kg/m;
b. i silos distano 10 metri dalla tramoggia;
c. la velocità con cui avanza il nastro trasportatore è pari a 0,6 m/s;
d. il valore del coefficiente di attrito globale stimato che tiene conto di tutti i fenomeni presenti
è uguale a 2,4;
Per calcolare la potenza minima necessaria al motore per l’azionamento del nastro trasportatore
bisogna utilizzare la seguente formula:
𝑃𝑚=𝐹𝑎∗𝑣/𝜂
Dove 𝐹𝑎 è la componente di forza comprensiva di coefficiente d’attrito globale e di massa totale
unitaria :
𝐹𝑎=𝑓∗𝑚𝑡∗𝑔∗𝑙=2,4∗1080∗9,81∗10=25,4 𝐾𝑁
𝑃𝑚=𝐹𝑎∗𝑣/𝜂=16,9 𝐾𝑊
Avendo scelto come efficienza 𝜂 del riduttore un fattore pari a 0,9.
RAPPORTO DI RIDUZIONE
determini il rapporto di riduzione𝑛 del riduttore da utilizzare per la trasmissione del moto e
calcoli la potenza che il motore deve erogare considerando che:
1)il mescolatore è comandato da un MAT a 4 poli
2)la velocità delle pale si può considerare costante e pari a 40 rpm la coppia resistente vale:
3)𝐶𝑟 = 60 + 1,17 · 𝜔2
[𝑁𝑚]
4)il rendimento del riduttore è pari al 75%
SOLUZIONE:
1) n =40 rpm giri al minuto
2)Cr = 60 + 1,17*w2
3)
=
---
w2 =6.28*n/60 =4,18
60 + 4,89 = 64,89 Nm
Potenza pale= Cr*w2 = 64,89* 4,18 = 271,24 Kw
4)Potenza motore =Potenza pale /rendimento =271,24/0,75 = 361,75
5)nstatore = 60f/2p = 60*50/2 = 1500
5.1) ws =n*6,28/60 = 157
Considerando uno scorrimento del 4%
5.2) wr =ws(1-s) = 157*0,96 = 150,72
5.3) rapporto di riduzione = w2/wr = 4,18/150,72 = 0.027
si supponga di voler monitorare la velocità di rotazione del motore che comanda u n nastro di carico. A
tal fine, sull'albero motore viene calettato un encoder incrementale (300 impulsi/giro, ampiezza 5 volt).
Considerando che nel ciclo di lavorazione la velocità massima del motore è pari a 1200 giri/min, si
ipotizzi una soluzione che fornisca una tensione compresa tra 0 e 10 Volt.
Motore
Riduttore ¼ piu Encoder ---
--- amplificatore di tensione
il convertitore fornisce in uscita un segnale analogico proporzionale alla velocità : INSERIRE UN
MOTORIDUTTORE DEL 50% (600 giri/m)
Applicazioni
programmazione
Operazioni preliminari
Ingressi digitali:
Pulsanti di START e STOP
Ingressi/uscite
Barriere fotoelettriche
proximity induttivo rileva oggetti metallici
Ingressi analogici:
cella di carico
Ultrasuoni
Temperature, umidita.
Trasduttori di peso
Trasduttori di flusso
Uscite digitali:
motore nastro, erogatori, mescolatore
allarmi
piastre riscaldanti
aeratori
nebulizzatori
Pistone pneumatici comandati da elettrovalvole
Si scrive l’algoritmo di gestione del processo attraverso i
diagrammi di flusso o FLOW-CHART da realizzare attraverso Il
software realizzato sia con PLC che con ARDUINO o con PIC.
lL processo di riempimento, controllo e chiusura delle bottiglie può essere
affidata ad un PLC. Il motore che muove il nastro viene avviato premendo un
pulsante (di start), può essere fermato in qualsiasi istante premendo un
ulteriore pulsante (di stop).
Si suppone inoltre che le bottiglie vengano posizionate automaticamente sul
nastro e ad intervalli di tempo tali da garantire, per ciascuna bottiglia, il
completamento del ciclo prima che venga depositata una nuova bottiglia; al
termine del percorso le bottiglie escono dal nastro.
Di seguito si ha , in modo sintetico, il funzionamento del sistema facendo
riferimento al ciclo di lavorazione di una bottiglia.
Avviamento
- il ciclo di lavorazione ha inizio premendo il pulsante di start e stop
- avviamento
- FC1 sensore di posizione posizionamento bottiglia
- FC2 livello di riempimento
Controllo livello Espulsione
- FC3 sensore di posizione bottiglia in movimento
- FC4 sensore raggiungimento livello
Fase di chiusura
- FC5 sensore di posizione arresto nastro il nastro
- si eccita l’elettrovalvola YV3 che determina l’uscita di un pistone che
esce, inserisce il tappo e rientra quando ha raggiunto il finecorsa
SQ2
- il nastro riparte, la bottiglia esce dal nastro
Semplificato con temporizzatori
Automatismo del sistema Miscelatore di liquidi con PLC
Si desidera automatizzare il processo per la miscelazione di 3 liquidi. Il sistema prevede la presenza di 3 condotte
di carico separate.
I primi 2 liquidi vengono versati nella vasca simultaneamente aprendo le valvole per un tempoT1;
successivamente viene inserito anche il terzo liquido.
La condotta del terzo liquido contiene un trasduttore di portata che fornisce un impulso per ogni litro transitato.
A conclusione del riempimento della vasca, un motore centrifuga i liquidi per un tempo T2 prima che la soluzione
venga immessa in un altro serbatoio.
Si può supporre che:
1. il serbatoio C versa 10 litri
2. i serbatoi A B C devono avere un sensore di livello minimo
3. la vasca che raccoglie i liquidi deve avere un sensore di livello minimo per la
condizione di vasca vuota e uno di livello massimo
4. il serbatoio per la raccolta finale è delle stessa dimensioni della vasca di raccolta e
contiene anch’esso un sensore di livello minimo per la condizione di vasca vuota e
uno di livello massimo
Si predispone la tabella delle assegnazioni degli ingressi e delle uscite.
Da rivedere
Si desidera automatizzare le operazioni del
processo di stagionatura del prosciutto relative
alla fase di raffreddamento. All’avvio del ciclo,
tramite un pulsan Si desidera automatizzare le
operazioni del processo te PM, si apre la porta
della cella frigorifera e vengono immessi N
prosciutti; a questo punto la porta si richiude. I
prosciutti rimangono un tempo T1 nella cella
per raggiungere la temperatura adeguata per
la loro lavorazione
Il processo di produzione di una industria alimentare nella quale vengono preparati e impacchettati prodotti da
forno (biscotti) è rappresentato dallo schema riprodotto in figura. In una prima parte del processo avviene il
dosaggio delle materie prime e il relativo impasto.
Una scheda di controllo a microcontrollore deve gestire la pinza di un robot. Un trasduttore di posizione utilizzato per
rilevare la posizione dell’oggetto che deve essere afferrato dalla pinza è costituito da una coppia emettitore-ricevitore di
luce infrarossa; ha un’uscita in tensione con caratteristica lineare che presenta le seguenti caratteristiche:
- alla distanza massima di 95 cm eroga 0,5 V;
- - alla distanza minima di 5 cm eroga 3 V.
Il segnale proveniente dal trasduttore deve essere:
- condizionato nell’intervallo di tensione compreso tra 0 V e 5 V; - convertito in segnale numerico da un microcontrollore
che fa parte della scheda di controllo.
Si deve tenere conto del fatto che il sistema deve valutare la posizione dell’oggetto con un errore massimo di 2 mm.
L’evoluzione dello stato del sistema deve essere osservata facendo uso o di display a 7 segmenti che visualizzano in
formato numerico la distanza pinza/oggetto o di una serie di LED che si accendono/spengono sempre in relazione alla
distanza pinza/oggetto.
Si richiede di:
- identificare almeno un microcontrollore compatibile con questo tipo di applicazione evidenziando in particolare le
caratteristiche del convertitore ADC in termini di risoluzione e di periodo di campionamento;
- realizzare il diagramma di flusso relativo al sistema di acquisizione e visualizzazione dei dati e scrivere il codice del
programma facendo riferimento ad un microcontrollore scelto in precedenza.
DA COMPLETARE
Comando nastro bottiglie
Arduino
Le tensioni V1 e V2 vengono Applicate ai due ingressi di un arduino che ogni 30 minuti
attraverso software l’acquisizione dei dati da elaborare
int LM35 = A1;
int su = A0;
int stato;
int stato1;
void setup()
{
pinMode ( LM35, INPUT);
pinMode ( 01, OUTPUT);
pinMode ( 02, OUTPUT);
pinMode ( su, INPUT);
pinMode ( 03, OUTPUT);
Serial.begin (9600);
}
void loop()
{
stato = analogRead ( LM35);
stato1 = analogRead ( su);
if ( stato < 410)
{
digitalWrite ( 01, HIGH);
digitalWrite ( 02, LOW);
Serial.println("Attivo il
riscaldamento");
}
if ( stato > 819)
{
abilita e gestisce
digitalWrite ( 01, LOW);
digitalWrite ( 02, HIGH);
Serial.println("Attivo l'aria condizionata");
}
if ( stato> 410 && stato < 819)
{
digitalWrite ( 01, LOW);
digitalWrite ( 02, LOW);
Serial.println("Temperatura ideale");
}
if ( stato1> 500)
{
digitalWrite ( 03, HIGH);
Serial.println("Attivo la deumidificazione");
}
if ( stato1< 499)
{
digitalWrite ( 03, LOW);
Serial.println("Spengo la deumidificazione");
}
// SECONDO METODO
float temperatura;
float umidita;
float test1;
float test2;
float volt_trimmer;
float volt_umidita;
int Led_temperatura = 3;
int Led_umidita = 4;
void setup()
{
//pinMode(pwm1, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
}
void loop()
{
test1 = analogRead (A0);
volt_trimmer = test1 * (5.0/1023.0);
test2 = analogRead (A1);
volt_umidita = test2 * (5.0/1023.0);
temperatura = volt_trimmer;
umidita = volt_umidita;
/***********************************/
//CONDIZIONE DI TEMPERATURA
if (temperatura > 2.6)
{
digitalWrite (3,HIGH);
/*analogWrite (dir1, 255);
digitalWrite (pwm1, HIGH);*/
}
else
{
digitalWrite (3,LOW);
//analogWrite (dir1, 0);
//digitalWrite (pwm1, LOW);
}
/***********************************/
//CONDIZIONE DI UMIDITA'
if (umidita < 4.8)
{
digitalWrite (4,LOW);
}
else
{
digitalWrite (4,HIGH);
}
}
Riempimento bottiglie
int start;
//avvio nastro
int startLED = 2; //indicatore nastro in movimento
int finish; //arresto nastro
int stopLED = 3; //indicatore nastro fermo
int riemp;
//fase di riempimento
int riempLED = 4; //indicatore fase riempimento
if (start == 1) { //fase di avvio
digitalWrite(startLED, HIGH);
}
if (riemp == 1) { //fase di riempimento
digitalWrite(startLED, LOW);
digitalWrite(riempLED, HIGH);
delay(3000);
digitalWrite(riempLED, LOW);
digitalWrite(startLED, HIGH);
}
void setup() {
pinMode(start, INPUT); //pulsante start input
pinMode(finish, INPUT); //pulsante fine input
pinMode(riemp, INPUT); //pulsante riempimento input
pinMode(startLED, OUTPUT); //indicatore avvio output
pinMode(stopLED, OUTPUT); //indicatore stop output
pinMode(riempLED, OUTPUT); //indicatore riempimento output
if (finish == 1) { //fase di arresto
digitalWrite(startLED, LOW);
digitalWrite(stopLED, HIGH);
delay(5000);
digitalWrite(stopLED, LOW);
}
start = digitalRead(10); //lettura pulsante start
}
void loop() {
finish = digitalRead(11); //lettura digitale sul pin 11
riemp = digitalRead(12); // lettura digitale sul pin 12
if (start == 1) {
start = 1; //autoritenuta del pulsante start
}
}
riscaldamento_
int t1=3;
int t2=7;
int riscaldamento=4;
int raffreddamento=5;
int umidita=6; //si prevede il rilevamento e l'invio dell'umidita ogni 2 secondi, non è specificato l'utilizzo
int tm;
int Trif;
void setup() {
// put your setup code here, to run once:
pinMode(OUTPUT,riscaldamento);
pinMode(OUTPUT,raffreddamento);
pinMode(INPUT,t1);
pinMode(INPUT,t2);
pinMode(INPUT,umidita);
}
void loop() {
delay(2000);//intervallo di due secondi
/*siccome nell'intervallo di due secondi non si potrà rilevare una variazione di temperatura,
quindi tengo in considerazione solo l'invio della temepratura ogni due secondi
tm=(t1+t2)/2 */
tm=(t1+t2)/2;
if(tm<(Trif - 30,72))//512/25= 20.48 è uguale ad un 1°C, 20.48/2= 10.24 equivale ad 1/2°C, quindi 1,5°C equivale ad 30.72
{
Trif=512;//siccome i valori variano da 0 a 1024. 1024/2=512
digitalWrite(raffreddamento, LOW);
digitalWrite(riscaldamento, HIGH);
}
else (tm>(Trif + 30.72));
digitalWrite(riscaldamento, LOW);
digitalWrite(raffreddamento, HIGH);
}
SITO ARCHEOLOGICO
int sensoreIN=8;
int sensoreOUT=7;
int in;
int out;
int count=0;
int press;
int led=6;
int led1=5;
void setup (){
// settaggio input e output
pinMode (sensoreIN, INPUT);
pinMode (sensoreOUT, INPUT);
pinMode (led, OUTPUT);
Serial.begin(9600);
}
void loop(){
//lettura persone in ingresso
in=digitalRead (sensoreIN);
if (in==HIGH){
press=count++;
}
//lettura persone in uscita
out=digitalRead (sensoreOUT);
if (out==HIGH){
press=count--;
}
//controllo chiusura o riapertura
stanza
if (press >= 30){
digitalWrite (led, HIGH);
Serial.println ("stanza piena");
Serial.println ("vietato ingresso");
}
else{
digitalWrite (led, LOW);
Serial.println ("benvenuti");
Serial.println ("visitatori:");
Serial.println (press);
}
delay(500);
//Libreria DHT22
#include <dht.h> // includo la libreria dht.h
dht DHT;
#define DHT22_PIN 5 // definisco il dht22 al pin 5
float hum; // inizializzo la varibile hum come numero decimale
float temp; // inizializzo la varibile temp come numero decimale
int ingresso=13;// inizializzo la varibile ingresso come numero intero e lo assegno al pin 13
int uscita=11;// inizializzo la varibile uscita come numero intero e lo assegno al pin 11
int stanzaIN=9;// inizializzo la varibile stanzaIN come numero intero e lo assegno al pin 9
int stanzaOUT=7;// inizializzo la varibile stanzaOUT come numero intero e lo assegno al pin 7
int piastreR=4;// inizializzo la varibile piastreR come numero intero e lo assegno al pin 4
int Aerazione=3;// inizializzo la varibile Aereazione come numero intero e lo assegno al pin 3
int Aeratori=2;// inizializzo la varibile Aereatori come numero intero e lo assegno al pin 2
int Nebulizzazione=8;// inizializzo la varibile Nebulizzazione come numero intero e lo assegno al pin 8
int LedTornello=12;// inizializzo la varibile LedTornello come numero intero e lo assegno al pin 12
int LedTornelloBloccato=10;// inizializzo la varibile LedTornelloBloccato come numero intero e lo assegno al pin 10
int LedTornelloStanzaBloccato=6;// inizializzo la varibile LedTornelloStanzaBloccato come numero intero e lo assegno al pin 6
bool T1; //inizializzo T1 come booleano
bool T2;//inizializzo T2 come booleano
bool T3;//inizializzo T3 come booleano
bool T4;//inizializzo T4 come booleano
int i1=0;//assego il valore 0 a i1
int i2=0;//assegno il valore 0 a i2
unsigned long StartTime;//inizializzo la variabile StartTime come unsigned long
unsigned long time;//inizializzo la variabile time come unsigned long
void setup()
{
pinMode(ingresso, INPUT);//associo ingresso a un input
pinMode(uscita, INPUT);//associo uscita a un input
pinMode(stanzaIN, INPUT);//associo stanzaIN a un input
pinMode(stanzaOUT, INPUT);//associo stanzaOUT a un input
pinMode(piastreR, OUTPUT);//associo piastreR a un input
pinMode(Aerazione, OUTPUT);//associo Aereazione a un input
pinMode(Aeratori, OUTPUT);//associo Aeratori a un input
pinMode(Nebulizzazione, OUTPUT);//associo Nebulizzazione a un input
pinMode(LedTornello, OUTPUT);//associo LedTornello a un input
pinMode(LedTornelloBloccato, OUTPUT);//associo LedTornelloBloccato a un input
pinMode(LedTornelloStanzaBloccato, OUTPUT);//associo LedTornelloStanzaBloccato a un input
Serial.begin(9600);//per la visualizzazione sul monitor seriale
}
#define puls start 1 //pulsante start al pin digitale
1
#define avv ottico 2 //rele avvisatore ottico al pin2
#define avv acustico 3 //rele avvisatore acustico al
pin3
#define pompa
4 //rele pompa al pin 4
#define elettrovalvola //al pin 5
#define sens estensimetro //al pin 6
#define sens A0
#define sens A1
#define sens A2
#define sens A3
#define sens A4
//Funzioni dei vari cicli
void start();
//Variabili globali
int sensorValue = 0;
int reading = 0;
int sensorPin = A0;
int sensorPin = A1;
int sensorPin = A2;
int sensorPin = A3;
int sensorPin = A4;
//inizio ciclo
void setup() {
pinMode(puls start, INPUT);
//
pinMode(avv ottico, OUTPUT);
//
pinMode(avv acustico, OUTPUT);
//
pinMode(pompa, OUTPUT);
//
pinMode(elettrovalvola, OUTPUT);
//
pinMode(sens estensimetro, INPUT);
//
pinMode(sens A0, INPUT);
pinMode(sens A1, INPUT);
pinMode(sens A2, INPUT);
pinMode(sens A3, INPUT);
pinMode(sens A4, INPUT);
//2)
serial.println //scrivi sul monitor seriale i valori ricevuti
delay (60000); //ogni 60 secondi
}
//Funzioni
void start(){
{
if(digitalRead(puls start)==HIGH){
// se si preme il pulsante start
digitalWrite (avv ottico,HIGH);
//accendi l'avvisatore ottico
digitalWrite (avv acustico,HIGH);
//accendi l'avvisatore acustico
delay (1000);
//aspetta un secondo
digitalWrite (avv ottico,LOW);
//spegni l'avvisatore ottico
digitalWrite (avv acustico,LOW);
//spegni l'avvisatore ottico
delay (1000);
//aspetta un secondo
}
delay (120000); //ciclo void start per 2 minuti
}
digitalWrite (pompa, HIGH); attiva il pistone
digitalWrite (avv ottico,HIGH);
//accendi l'avvisatore ottico
digitalWrite (avv acustico,HIGH);
//accendi l'avvisatore acustico
delay (500);
//aspetta mezzosecondo
digitalWrite (avv ottico,LOW);
//spegni l'avvisatore ottico
digitalWrite (avv acustico,LOW);
//spegni l'avvisatore ottico
delay (500);
//aspetta mezzo secondo
digitalRead (sens estensimetro); //leggi il sensore estensimetrico
// viene inviato un segnale di comando per l’azionamento della pompa
digitalWrite (10,HIGH);
// fino a quando la deformazione è inferiore alla soglia massima consentita
while (def<defmax) {
// si continua a leggere sul pin 5 il dato relativo alla deformazione e la pompa continua a funzionare
def=digitalRead (5);
}
// altrimenti viene inviato un segnale di comando per l’arresto della pompa
digitalWrite (10,LOW);
// e contemporaneamente un ulteriore segnale di comando per l’azionamento dell’elettrovalvola che, in
//relazione ai dati di deformazione letti sul pin 5, mantiene lo stato assunto fino a quando
// la deformazione non si riduce a valori inferiori all’1% del livello massimo
while (def>0.1*defmax) {
def=digitalRead (5);
digitalWrite (11,HIGH);
}
// in caso contrario viene inviato un segnale di comando che riporta l’elettrovalvola nelle condizioni iniziali
digitalWrite (11,LOW);
II metodo con programma completo
Il linguaggio ad alto livello (Arduino) in cui bisogna inizializzare le variabili utilizzate, che supponiamo di
tipo intero o float sono
– int t la variabile tempo
- int ∆t l’incremento del tempo
- int i la variabile contatore
- int f la frequenza
- float D la formazione
if (sens estensimetrico == valore prestabilito); //se il sensore rileva deformazione superiore al valore prestabilito:
{
digitalWrite (pompa, LOW);// DISATTIVA il pistone
digitalWrite (elettrovalvola, HIGH);// ATTIVA L'ELETTROVALVOLA e rilascia il fluido
}
if(analogRead(sens A0,A1,A3,A4) >1*100 > Sens A2)
{
//scrivi il valore e acquisisci i dati
serial.println (Valore);
//disattiva segnalazioni acustiche e visive
digitalWrite (avv ottico,LOW);
//spegni l'avvisatore ottico
digitalWrite (avv acustico,LOW);
//spegni l'avvisatore ottico
}
}
//fine ciclo prova conclusa
Seconda parte: Inserire 2 quesiti tra quelli proposti nella seconda parte
Quesito 1:soluzione per la generazione dei segnali ottici e acustici, di preallarme e di esecuzione
della prova, scegliendo i dispositivi necessari e le tecniche di comando e di attuazione.
L’ambiente in cui un segnale viene trasmesso può modificare le caratteristiche di un segnale.
Le principali cause di degradazione di un segnale sono:
- l’attenuazione;
- iI rumore;
- la distorsione.
L’attenuazione riduce la potenza del segnale originale durante la sua propagazione nelmezzo trasmissivo
determinando di conseguenza una perdita di qualità.
// fino a quando lo stato del pulsante collegato al pin 2 è LOW continuo a leggere lo stato del pulsante
while (statoPB==LOW) {
statoPB=digitalRead(2);
}
// nel caso opposto (stato HIGH) inizia il ciclo per l’emissione di impulsi luminosi e sonori
for (i=1;i<=120;i++) {
digitalWrite (12,HIGH); // emissione impulso luminoso
digitalWrite (13,HIGH); // emissione impulso sonoro
delay (200);
digitalWrite (12,LOW); // interruzione impulso luminoso
digitalWrite (13,LOW); // interruzione impulso sonoro
delay (800);
}
Di seguito viene proposto il segmento di programma posto all’interno del void loop che attiva le segnalazioni
ottiche e acustiche durante il periodo di esecuzione della prova.
// dopo 2 s viene raddoppiata la frequenza degli impulsi portando la durata del livello basso a 300 ms in modo tale da
//dimezzare il periodo gli impulsi persistono fino a quando la deformazione non scende a valori inferiori all’1% del lmassimo
max
while (def>0.1*defmax) {
digitalWrite (12,HIGH); // emissione impulso luminoso
digitalWrite (13,HIGH); // emissione impulso sonoro
delay (200);
digitalWrite (12,LOW); // interruzione impulso luminoso
digitalWrite (13,LOW); // interruzione impulso sonoro
delay (300);
}
Codice del programma di gestione
int value = 5;
int tagArray[4];
int totale = 0;
int i = 0;
int OK = 10;
int WARNING = 11;
// inizializzo le variabili necessarie per la compilazione del programma
void setup() {
pinMode(value,INPUT); //Imposto la variabile come ingresso
Serial.begin(9600);
}
void loop() {
Serial.print("Valori tabella:
");
for (i=0; i<4; i++) {
analogRead(value);
tagArray[i]=value;
Serial.print(tagArray[i]);
Serial.print("
");
totale += tagArray[i];
delay(10);
}
//Ogni 10ms memorizza il valore letto in un array (vettore) di numero i
int media = totale/i; //Si esegue la media dei valori
Serial.println("");
Serial.println("Media dei valori:
");
Serial.print(media);
if(media<409) {
Serial.println("Tutto OK"); //Se la media ricavata è minore di 2v, non vi
è errore
OK = HIGH;
WARNING = LOW;
}
else {
Serial.println("WARNING!"); //Se la media ricavata è maggiore di 2v, c'è
un pericolo
WARNING = HIGH;
OK = LOW;
}
delay(10);
}
II METODO
int
int
int
int
int
int
int
int
int
int
int
int
int
int
sensore_T=A0;
sensore_livello=6;
m1=7;
m2=8;
m3=9;
m4=10;
m_LM293=11;
m_LM293_2=12;
i;
somma=0;
media;
Tm=50;
TM=63;
TM2=55;
void setup()
{
Serial.begin(9600);
e arduino
pinMode(sensore_livello, INPUT);
pinMode(m1, OUTPUT);
pinMode(m2, OUTPUT);
pinMode(m3, OUTPUT);
pinMode(m4, OUTPUT);
pinMode(m_LM293, OUTPUT);
pinMode(m_LM293_2, OUTPUT);
}
//inizializzo il sensore analogico di temperatura
//inizializzo il sensore digitale di livello
//inizializzo i motori
//inizializzo la pompa dell'acqua
//imposto i limiti di temperatura
//inizializzo una comunincazione seriale tra il pc
void loop()
{
sensore_digitale();
sensore di livello
for(i=0; i<=12; i++)
{
int sensore=analogRead(sensore_T);
delay(2000);
somma=somma+sensore;
Serial.println("Sensore ");
Serial.println(sensore);
if(i==12)
{
media=somma/i;
i=0;
somma=0;
Serial.println("media
");
Serial.println(media);
}
//funzione che permette di cambiare verso di spinta della pompa in base al
//funzione che permette di fare la media
}
if(media<=Tm)
{
digitalWrite(m1, LOW);
digitalWrite(m2, LOW);
digitalWrite(m3, LOW);
digitalWrite(m4, LOW);
digitalWrite(m_LM293, LOW);
}
if(Tm<media<=TM2)
riportati in tabella (vedi funzione in fondo)
caso1();
//se media è minore di Tm tutte le valvole sono chiuse
//se è verificata tale condizione le valvole si attivano per i tempi
if(TM2<media<=TM)//se è verificata tale condizione le valvole si attivano per i tempi
riportati in tabella aumentati del 30% (vedi funzione in fondo)
caso2();
if(media>TM)
//se è verificata tale condizione le valvole si attivano per i
tempi riportati in tabel la aumentati del 50% (vedi funzione in fondo)
caso3();
}
void caso1()
{
digitalWrite(m_LM293, HIGH);
digitalWrite(m1, HIGH);
delay(2000);
digitalWrite(m1, LOW);
digitalWrite(m2, HIGH);
delay(3000);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
delay(3000);
digitalWrite(m3, LOW);
digitalWrite(m4, HIGH);
delay(4000);
digitalWrite(m4, LOW);
}
void caso2()
{
digitalWrite(m_LM293, HIGH);
digitalWrite(m1, HIGH);
delay(2600);
digitalWrite(m1, LOW);
digitalWrite(m2, HIGH);
delay(3900);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
delay(3900);
digitalWrite(m3, LOW);
digitalWrite(m4, HIGH);
delay(5200);
digitalWrite(m4, LOW);
}
void caso3()
{
digitalWrite(m_LM293, HIGH);
digitalWrite(m1, HIGH);
delay(3000);
digitalWrite(m1, LOW);
digitalWrite(m2, HIGH);
delay(4500);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
delay(4500);
digitalWrite(m3, LOW);
digitalWrite(m4, HIGH);
delay(6000);
digitalWrite(m4, LOW);
}
void sensore_digitale()
{
if(sensore_livello==HIGH)
{
digitalWrite(m_LM293, HIGH);
digitalWrite(m_LM293, LOW);
}
else
{
digitalWrite(m_LM293, LOW);
digitalWrite(m_LM293_2, HIGH);
}
}
int value = 5;
int tagArray[4];
int totale = 0;
int i = 0;
int OK = 10;
int WARNING = 11;
// inizializzo le variabili necessarie per la compilazione del programma
void setup() {
pinMode(value,INPUT); //Imposto la variabile come ingresso
Serial.begin(9600);
}
void loop() {
Serial.print("Valori tabella: ");
for (i=0; i<4; i++) {
analogRead(value);
tagArray[i]=value;
Serial.print(tagArray[i]);
Serial.print(" ");
totale += tagArray[i];
delay(10);
} //Ogni 10ms memorizza il valore letto in un array (vettore) di numero i
int media = totale/i; //Si esegue la media dei valori
Serial.println("");
Serial.println("Media dei valori: ");
Serial.print(media);
if(media<409) {
Serial.println("Tutto OK"); //Se la media ricavata è minore di 2v, non vi è errore
OK = HIGH;
WARNING = LOW;
}
else {
Serial.println("WARNING!"); //Se la media ricavata è maggiore di 2v, c'è un pericolo
WARNING = HIGH;
OK = LOW;
}
delay(10);
}
1) con Arduino si misura il tempo a partire dall’inizio di T3 (livello alto) fino al suo esaurimento «livello basso»
con la funzione millis: l’impulso si applica ad un pin di ainterrupt e automaticamente si lancia il conteggio dei secondi
Misurare il tempo fra due successive pressioni di un pulsante
int pinState = 0;
// variabile pinState (memorizza lo stato del pin 7)
int countOn = 0;
// variabile countOn (ha valore 1 quando il conteggio è in corso)
1. Si proponga una soluzione per la misura della
int released = 0;
// variabile released (ha valore 1 quando il pin 7 è LOW)
float tempo0 = 0;
// valore del tempo a inizio conteggio
larghezza dell’impulso che utilizzi in parte o
float tempoX = 0;
// valore del tempo a fine conteggio
totalmente un microcontrollore o un PLC.
void setup() { pinMode(7, INPUT);
// imposta come input il pin 7
Serial.begin(9600);
// imposta la comunicazione seriale
}
3. si fornisca un algoritmo per verificare il corretto
void loop() {
funzionamento del software del sistema.
pinState = digitalRead(7);
// legge il pin 7
if (pinState == LOW) {
released = 1;
// se il pin 7 è LOW setta a 1 la variabie released
}
if (pinState == HIGH && countOn == 0 && released == 1) {
// verifica le condizioni per iniziare il conteggio
tempo0 = millis();
Serial.println ("inizio conteggio");
countOn = 1;
released = 0; delay(500);
}
if (pinState == HIGH && countOn == 1 && released == 1) {
// verifica le condizioni di conteggio terminato
tempoX = millis();
Serial.print ("fine conteggio: ");
Serial.print ((tempoX-tempo0)/1000);
Serial.println (" secondi");
countOn = 0;
tempo0 = 0;
tempoX = 0;
released =0;
delay(500);
}
Simile
Una scheda di controllo a microcontrollore deve gestire la pinza di un robot. Un trasduttore di posizione utilizzato per
rilevare la posizione dell’oggetto che deve essere afferrato dalla pinza è costituito da una coppia emettitore-ricevitore di
luce infrarossa; ha un’uscita in tensione con caratteristica lineare che presenta le seguenti caratteristiche:
- alla distanza massima di 95 cm eroga 0,5 V;
- - alla distanza minima di 5 cm eroga 3 V.
Il segnale proveniente dal trasduttore deve essere:
- condizionato nell’intervallo di tensione compreso tra 0 V e 5 V; - convertito in segnale numerico da un microcontrollore
che fa parte della scheda di controllo.
Si deve tenere conto del fatto che il sistema deve valutare la posizione dell’oggetto con un errore massimo di 2 mm.
L’evoluzione dello stato del sistema deve essere osservata facendo uso o di display a 7 segmenti che visualizzano in
formato numerico la distanza pinza/oggetto o di una serie di LED che si accendono/spengono sempre in relazione alla
distanza pinza/oggetto.
3- identificare almeno un microcontrollore compatibile con questo tipo di applicazione evidenziando in particolare le
caratteristiche del convertitore ADC in termini di risoluzione e di periodo di campionamento;
4- realizzare il diagramma di flusso relativo al sistema di acquisizione e visualizzazione dei dati e scrivere il codice del
programma facendo riferimento ad un microcontrollore scelto in precedenza.
Arduino
/* Hardware Connections:
* Arduino | HC-SR04
* ------------------* 5V | VCC
* 9 | Trig
* 8 | Echo
* GND | GND
*/
#include <LiquidCrystal.h>
// Pins
const int TRIG_PIN = 9;
const int ECHO_PIN = 8;
// Anything over 400 cm (23200 us pulse) is "out of range"
const unsigned int MAX_DIST = 23200;
LiquidCrystal lcd(6, 7, 2, 3, 4, 5);
int EV1 = 13;
int EV2 = 12;
int Motore = 11;
int Lettura = 0;
unsigned long t1;
unsigned long t2;
unsigned long pulse_width;
int mm;
float inches;
void setup() {
lcd.begin(16, 2);
lcd.setCursor(0,0);
lcd.print("Distanza");
lcd.setCursor(0,1);
lcd.print("mm: ");
pinMode(Motore, OUTPUT);
pinMode(EV1, OUTPUT);
pinMode(EV2, OUTPUT);
// The Trigger pin will tell the sensor to range find
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
// We'll use the serial monitor to view the sensor output
Serial.begin(9600);
}
void loop() {
analogWrite(Motore,255);
DistanceCounter();
// Print out results
if ( pulse_width > MAX_DIST ) {
Serial.println("Out of range");
} else {
lcd.setCursor(8,8);
lcd.print(" ");
lcd.setCursor(8,8);
lcd.print(mm);
Serial.print(mm);
Serial.print(" mm");
if (mm <=10) // this part have to be tested in a real prototype
{
analogWrite(Motore,0);
digitalWrite(EV1, HIGH);
digitalWrite(EV2, HIGH);
do
{}
while(analogRead(A1)< 865);
digitalWrite(EV1, LOW);
do
{}
while(analogRead(A1)< 1023);
digitalWrite(EV2, LOW);
}
// Wait at least 60ms before next measurement
delay(60);
}
void DistanceCounter(){
long duration;
// The PING))) is triggered by a HIGH pulse of 2
or more microseconds.
// Give a short LOW pulse beforehand to
ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
mm = duration * 0.345/2;
}
1.4 SEGMENTO DI CODICE
// Codice Arduino per sismografo fisso
// NON COMPLETO
float K = 300;
// ANALOG IN
int axPin = A0;
int ayPin = A1;
int azPin = A2;
// DIGITAL
int upPin = 8;
int downPin = 7;
// ANALOG OUT
int releGas = 9;
int releAcqua = 10;
int releOtticaAcust = 11;
double Vx = 1.5;
double Vy = 1.5;
double Vz = 1.5;
double ax = 0.0;
double ay = 0.0;
double az = 0.0;
double a = 0.0;
double aTH = 9.81/20; // soglia
double aTHincr = 9.81/100; // incrementodellasoglia
void setup(){
// imposta U e D come input
pinMode (upPin,INPUT);
pinMode (downPin,INPUT);
// attiva la resistenza di pull-up
digitalWrite (upPin, HIGH); //ora HIGH corrisponde a interruttore aperto
digitalWrite (downPin, HIGH);
// Relè
pinMode (releGas, OUTPUT);
pinMode (releAcqua, OUTPUT);
pinMode (releOtticaAcust, OUTPUT);
int up= digitalRead (upPin);
if (up == LOW)
aTH = aTH + aTHincr;
int down= digitalRead (downPin);
if (up == HIGH)
aTH = aTH - aTHincr;
Vx = analogRead(axPin);
Vy = analogRead(ayPin);
Vz = analogRead(azPin);
// calcolo del modulo di accelerazione
ax = (Vx-1.5)/K;
ay = (Vx-1.5)/K;
az = (Vx-1.5)/K;
a = sqrt (ax*ax+ay*ay+az*az);
if(a>aTH) {
if(a>aTH*1.25)
{
digitalWrite(releOtticAcust, HIGH);
}
if (a>aTH*1.50 {
digitalWrite(releGas, HIGH);
digitalWrite(releAcqua, HIGH);
}
}
QUESITO 1 - Le modiche da apportare per gestire i pulsanti U e D con una tecnica di interrupt con il sistema descritto
nella prima parte sono soptratutto di tipo software.
Infatti i piedini dei pulsanti U e D sono collegati rispettivamente a GND e sui pin 8 e 7,pertanto vengono già usati in
modalità HIGH corrispondente a circuito aperto. Tuttavia per la tecnica di interrupt U e D vanno trasferiti su i pins 3 e
2, gli unici disponibili per la modalità interrupt su Arduino Uno. Le variazioni da apportare al software sviluppato nella
prima parte sono riportate di seguito.
// Codice Arduino per sismografo fisso
// Codice modifica interrupt
// NON COMPLETO DIGITAL
int upPin = 3;
in downPin = 2;
volatile double aTH = 9.81/20; //forza il compilatore a caricarlada ram
double aTHincr = 9.81/100; // incremento della soglia
void setup() {
// imposta U e D come pin di interrupt
pinMode (upPin, INPUT_PULLUP);
pinMode (downPin, INPUT_PULLUP);
attachInterrupt (digitalPinToInterrupt (upPin), incrementa, CHANGE);
attachInterrupt (digitalPinToInterrupt (downPin), decrementa, CHANGE);
}
void loop (){
}
void incrementa (){
aTH = aTH + aTHincr;
}
void decrementa (){
aTH = aTH - aTHincr
}
#include <Servo.h>
int sensorPin = A0;
int servoPin = 9;
int sensorValue = 0;
int servoGrad = 90; //imposta una variabile di tipo integer che indica la posizione, in gradi, del servo, in fase di start dello sketch posiziono il valore del
servo a 90°, se tu vuoi
// partire da una angolazione differente puoi variare questo valore;
int tolleranza = 40; //imposta una variabile di tipo integer a cui assegni una tolleranza entro la quale il servo non deve ruotare anche se il sensore rileva
variazioni dal valore centrale, vedrai in seguito meglio a cosa serve;
Servo myservo;
void setup() {
pinMode( sensorPin, INPUT);
myservo.attach( servoPin );
myservo.write( servoGrad );
void loop() {
sensorValue = analogRead(sensorPin);
if ( sensorValue < (512-tolleranza) ) //esegui il primo controllo se il valore letto dalla linea 28 è minore della differenza tra 512 e la tolleranza impostata
sei nella condizione in cui il pannello non è più orientato difronte al sole, una delle due foto resistenze sta rilevando una intensità maggiore dell’altra, quale
sia dipende da come hai collegato le resistenze, nel mio esempio è la foto resistenza destra e per adeguare la posizione del pannello devo ruotare oltre i 90
gradi iniziali, tra 90° e 180°;
{
if (servoGrad < 180) servoGrad++;// esegui una ulteriore verifica, che il valore in gradi assunto dal servo non sia > di 180 in quanto il servo che stai
utilizzando non sarebbe comunque in grado si andare oltre, se l’angolo del servo è < di 180° allora puoi incrementare i gradi di rotazione.
L’espressione servoGrad++ indica di incrementare di un grado il valore di servoGrad da 90 a 91,92,93 ecc… ad ogni loop() arduino;
}
if ( sensorValue > (512+tolleranza) ) //verifica una condizione simile a quella della linea 29. In questo caso il valore letto dal sensore è confrontato con la
somma tra 512 + tolleranza;
{
if (servoGrad > 0) servoGrad--; // verifica che l’angolo il cui il servo si trova non sia inferiore a 0, anche in questo caso non sarebbe possibile per il
servomotore eseguire lo spostamento richiesto. Decrementa quindi il valore di servoGrad un grado per ogni loop() in cui si verificano le condizioni
}
myservo.write( servoGrad );
delay(100);
}
con
il
metodo attach(pin)
dell’oggetto myservo
indichi a quale pin
è
collegato
il
servomotore;
l
con
il
metodo write(grad)
imposti i gradi a cui il
servo
deve
posizionarsi, in fase
di setup() il valore
sarà quello definito
dal setup
linea 28: leggi il
valore
proveniente
dal pin analogico
( A0 ) con la
funzione analogRead
() e lo assegni alla
variabile sensorValue
definita
int
sensorvalue = 0