1
SCUOLA NAZIONALE DOTTORANDI DI ELETTROTECNICA
FERDINANDO GASPARINI
FORMULAZIONE FINITA
DELL’ELETTROMAGNETISMO
partendo dai fatti sperimentali
Enzo Tonti
Udine 13-14 Giugno 2000
Palazzo Antonini, Università degli Studi di Udine
2
z
U
legge di Faraday
legge di
Maxwell-Ampère
z
Um
Qf
Ψ
y
y
x
Φ
legge di Gauss
magnetica
x
Qc
legge di Gauss
elettrica
Ψ
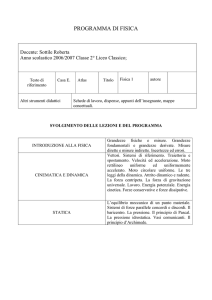
Figura 1: Le otto equazioni scalari del campo elettromagnetico sono equazioni di
bilancio nello spazio-tempo. La figura illustra la proiezione in tre dimensioni di un
ipercubo “esploso” dello spazio-tempo.
0.1
Prefazione
Questa dispensa è stata scritta per il corso breve ET2000, Scuola Nazionale Dottorandi di Elettrotecnica “Ferdinando Gasparini”, che si terrà presso l’Università di Udine
nei giorni 13 e 14 giugno 2000.
La dispensa è stata redatta in un paio di mesi e quindi soffre di frammentarietà,
contiene ripetizioni, salti e forse anche qualche errore. Il lettore tenga conto che non
ho mai avuto occasione di fare un corso sul tema qui trattato in quanto “condannato”
da circa quarant’anni ad insegnare la Meccanica Razionale, anche se mi occupo di
Fisica Matematica.
Mentre chiedo venia di questo, mi auguro che i lettori vorranno indicarmi queste
deficienze in vista della possibilità di trasformare la dispensa in un libro. A costoro
va, fin d’ora, il mio grazie più sincero.
Desidero esprimere un particolare ringraziamento al prof. Andrea Stella che ha
mostrato interesse per questo approccio, fornendomi l’incoraggiamento che mi mancava. Ringrazio anche il collega Raffaele Martone che, con il collega Stella, mi ha
rivolto l’invito a tenere questo ciclo: non potevano offrirmi occasione più bella per
presentare quello che ritengo un punto di vista nuovo ai dottorandi e ai ricercatori
che lavorano in questo campo. Un ringraziamento va ai colleghi Fabrizio Bellina e
Francesca Cosmi che hanno letto le bozze dandomi preziosi consigli. Ringrazio inoltre
il dottorando Massimiliano Marrone che per primo ha fatto le applicazioni numeriche
e che mi ha coadiuvato nella stesura del relativo capitolo.
Trieste, 5 giugno 2000
Indice
0.1
0.2
Prefazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Notazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
8
1 Introduzione
1.1 Definizione operativa . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Le sorgenti del campo . . . . . . . . . . . . . . . . . . . . . . . . . .
11
14
15
2 Elettrostatica
2.1 La carica Q: sorgente del campo elettrico . . . .
2.2 La prima legge dell’elettrostatica . . . . . . . .
2.2.1 Induzione elettrostatica . . . . . . . . . .
2.2.2 La misura di Ψ . . . . . . . . . . . . . .
~ . . . . . . . . . .
2.2.3 Il vettore induzione D
2.2.4 Il teorema di Gauss . . . . . . . . . . . .
2.3 La seconda legge dell’elettrostatica . . . . . . .
~ . . . . . . . . . . . . . . . .
2.3.1 Il vettore E
2.3.2 Equazione costitutiva D−E . . . . . . .
2.3.3 Il vettore polarizzazione P~ . . . . . . . .
2.3.4 La legge di Coulomb . . . . . . . . . . .
2.3.5 La tensione elettrica U . . . . . . . . . .
2.3.6 Il potenziale elettrico . . . . . . . . . . .
2.3.7 La misura della tensione in un dielettrico
2.4 Equazione costitutiva U −I . . . . . . . . . . . .
2.4.1 Riassunto . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
18
19
20
21
22
24
24
25
26
27
28
31
32
32
34
.
.
.
.
.
.
35
35
36
36
38
39
39
3 Magnetostatica
3.1 La corrente I: sorgente del campo magnetico.
3.2 La prima legge della magnetostatica . . . . . .
~ . . . . .
3.2.1 Il vettore campo magnetico H
3.2.2 La tensione magnetica Fm . . . . . . .
~ . . . . . . . . .
3.2.3 La natura assiale di H
3.2.4 Misura della tensione magnetica . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
INDICE
3.2.5 La prima legge . . . . . . . . . .
3.2.6 Il potenziale scalare magnetico Vm
3.3 La seconda legge della magnetostatica . .
~
3.3.1 Il vettore induzione magnetica B
3.3.2 La nascita del flusso magnetico Φ
~ . . . . . .
3.3.3 La natura assiale di B
3.4 L’equazione costitutiva B −H . . . . . .
.
.
.
.
.
.
.
4 Elettromagnetismo
4.1 Induzione elettromagnetica . . . . . . . . .
4.1.1 L’impulso della forza elettromotrice
4.1.2 La misura del flusso magnetico . .
4.1.3 La legge di Maxwell-Ampère . . . .
4.2 Le leggi del campo in forma finita . . . .
5 I complessi di celle
5.1 Il ruolo dei complessi di celle . . . . . .
5.2 Complessi simpliciali . . . . . . . . . .
5.2.1 Triangolazione di Delaunay . .
5.2.2 Circocentro . . . . . . . . . . .
5.2.3 Triangolazione generica . . . . .
5.3 Complesso duale . . . . . . . . . . . .
5.3.1 Complessi di Delaunay-Voronoi
5.4 Orientazione degli elementi spaziali . .
5.4.1 Orientazione interna . . . . . .
5.4.2 Orientazione esterna . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
E
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Analisi delle grandezze fisiche
6.0.3 Le sorgenti del campo . . . . . . . . . . . .
6.0.4 I potenziali del campo . . . . . . . . . . . .
6.1 Classificazione delle grandezze . . . . . . . . . . . .
6.2 I parametri fisici . . . . . . . . . . . . . . . . . . .
6.3 Le variabili fisiche . . . . . . . . . . . . . . . . . . .
6.3.1 Variabili di configurazione . . . . . . . . . .
6.3.2 Variabili di sorgente . . . . . . . . . . . . .
6.3.3 Variabili energetiche . . . . . . . . . . . . .
6.4 Variabili globali nello spazio . . . . . . . . . . . . .
6.4.1 La proprietà addittiva . . . . . . . . . . . .
6.4.2 Le densità di linea, di superficie e di volume
6.5 Associazione agli elementi spaziali . . . . . . . . . .
6.6 Associazione agli elementi temporali . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
43
44
44
46
48
48
.
.
.
.
.
51
51
52
54
56
57
.
.
.
.
.
.
.
.
.
.
63
63
64
65
65
68
68
73
76
78
81
.
.
.
.
.
.
.
.
.
.
.
.
.
89
90
90
90
91
92
92
92
92
93
96
97
98
101
INDICE
7 Analisi delle equazioni fisiche
7.1 Le leggi di campo . . . . . . . . . . . . . . . . . . .
7.2 Equazioni di struttura . . . . . . . . . . . . . . . .
7.2.1 Legge di conservazione della carica . . . . .
7.2.2 Legge d’induzione elettrostatica . . . . . . .
7.2.3 Legge dell’induzione elettromagnetica . . . .
7.2.4 Legge di conservazione del flusso magnetico
7.2.5 Legge di Maxwell-Ampère . . . . . . . . . .
7.3 Equazioni costitutive . . . . . . . . . . . . . . . . .
7.3.1 Verso la formulazione differenziale . . . . . .
7.3.2 Campi uniformi . . . . . . . . . . . . . . . .
7.4 Equazione fondamentale . . . . . . . . . . . . . . .
7.4.1 Il problema fondamentale del campo . . . .
7.4.2 L’equazione fondamentale . . . . . . . . . .
7.4.3 Sorgente impressa e indotta . . . . . . . . .
7.4.4 Sovrapposizione degli effetti . . . . . . . . .
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8 Tavole riassuntive
9 Risoluzione numerica
9.1 Rettangoli ed esaedri . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Triangoli e tetraedri . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Il problema da risolvere . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Equazione di Poisson in forma finita . . . . . . . . . . . . . . . . . .
9.4.1 Ricavo di E dai potenziali nei vertici . . . . . . . . . . . . .
~ dalle tensioni sui lati . . . . . . . . . . . .
9.4.2 Come ricavare E
~ . . . . . . . . . . . . . . .
9.4.3 Dati i flussi magnetici trovare B
9.5 Equazione costitutiva Φ(Fm ) . . . . . . . . . . . . . . . . . . . . . .
9.5.1 Calcolo per problemi piani . . . . . . . . . . . . . . . . . . .
9.5.2 Pseudocodice del modulo che calcola le tensioni magnetiche .
9.6 Equazione costitutiva Ψ(V ) . . . . . . . . . . . . . . . . . . . . . .
9.6.1 Pseudocodice del modulo che calcola il vettore {V } . . . . .
105
105
106
107
108
108
109
109
116
117
120
121
121
122
123
125
127
.
.
.
.
.
.
.
.
.
.
.
.
137
137
138
139
142
144
146
153
154
155
158
158
162
A Vettori assiali e polari
163
B Sulle definizioni operative
167
C Covarianza e controvarianza rese semplici
169
C.1 Versione geometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
D Successive overrelaxation
173
6
INDICE
E Moto di una particella
175
E.0.1 Moto unidimensionale. . . . . . . . . . . . . . . . . . . . . . . 178
E.0.2 Moto tridimensionale . . . . . . . . . . . . . . . . . . . . . . . 179
F Punti di Gauss
F.1 Intervallo canonico . . . . . . .
F.1.1 Polinomi di terzo grado .
F.1.2 Polinomi di quinto grado
F.2 Intervallo generico . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
181
181
182
182
184
INDICE
7
140
personaggi dell'elettromagnetismo
120
Coulomb
Galvani
100
Volta
Ampère
80
Gauss
Ohm
60
Faraday
Neumann
Kelvin
40
Kirchhoff
Maxwell
20
Lorentz
Hertz
0
(personaggi.m)
-20
1700
1750
1800
1850
1900
1950
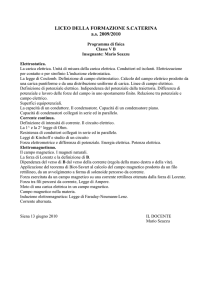
Figura 2: I principali personaggi dell’elettromagnetismo. Nel 1800 Volta costruı̀
la pila; nel 1819 Oersted scoprı̀ la deviazione dell’ago magnetico in prossimità di
un filo percorso da corrente; nel 1873 Maxwell pubblica il Treatise of Electricity
and Magnetism.
8
INDICE
0.2
Notazioni
I punti, le linee, le superfici ed i volumi sono degli enti spaziali elementari che
ci servono per descrivere lo spazio: ad essi daremo il nome di elementi spaziali .
Analogamente gli istanti e gli intervalli sono gli enti temporali elementari che ci
servono per descrivere il tempo: ad essi daremo il nome di elementi temporali.
Questi sei elementi si potrebbero rappresentare con le seguenti lettere: P, L, S, V
I, T che sono le iniziali dei rispettivi nomi1 . Senonchè vi sono alcuni inconvenienti:
la lettera L indica spesso la lunghezza di una linea; la lettera S indica spesso l’area di
una superficie. Le cose stanno peggio per la lettera V . Infatti già il termine “volume”
indica due cose distinte: la regione di spazio e la sua misura. Cosı̀ in architettura si
parla spesso di “volumi” intendendo regioni di spazio mentre si afferma che il “volume”
di una stanza è di 30 m3 . Analogamente la lettera T indica spesso la durata di un
intervallo. Queste due ragioni suggeriscono di usare i simboli in grassetto per indicare
gli elementi spaziali.
Ciascuno di questi enti spaziali e temporali può possedere due tipi di orientazioni,
quella “interna” e quella “esterna”, come spiegheremo nella sezione (5.4). Per distinguere l’orientazione interna da quella esterna porremo un tilde sopra la lettera per
indicare l’orientazione esterna. Useremo quindi la seguente notazione:
elementi spaziali e temporali
punto
P
linea
L
superficie
S
volume (regione) V
istante
I
intervallo
T
P̃
L̃
S̃
Ṽ
Ĩ
T̃
loro misura
lunghezza
area
volume (misura)
L, L̃
S, S̃
V, Ṽ
periodo o durata
T, T̃
Termini ricorrenti. Un materiale si dice:
• omogeneo se le sue proprietà fisiche non variano con il posto;
• isotropo se non variano con la direzione.
Un campo si dice:
• uniforme se le grandezze che lo descrivono sono invarianti per traslazione;
• costante se sono invarianti nel tempo.
1
Salvo T che però si concilia con la tradizionale notazione di un periodo.
0.2. NOTAZIONI
9
Il tasso di una grandezza è il rapporto tra una grandezza globale associata ad un
intervallo di tempo e la durata dell’intervallo. L’impulso di una grandezza è l’integrale della grandezza in un intervallo di tempo. Indicheremo l’impulso della grandezza
generica F con la notazione calligrafica F. In particolare:
V[T ] =
R
T
V dt
E[T ] =
R
T
U dt
Fm [T̃ ] =
R
T̃
Fm dt
(1)
impulso di potenziale impulso di tensione impulso di tensione magnetica
Considerazioni epistemologiche.
Simboli. Ci rifacciamo ai simboli della International Union of Pure and Applied
Physics (IUPAP), revisione del 1987, pubblicato sulla rivista Physica (1987 ?). Ogni
disaccordo nella nomenclatura e nei simboli usati in questa dispensa deve ritenersi un
errore del presente autore che sarà grato a coloro che glielo segnaleranno.
Seguendo le raccomandazioni date nelle norme IUPAP l’aggettivo “specifico” per
designare una grandezza intensiva deve essere evitato il più possibile e deve in ogni
caso essere ristretto al senso “diviso per la massa”.
Unità di misura. Faremo riferimento esclusivamente al Sistema Internazionale
(SI).
A causa del poco tempo a disposizione nella redazione di questa dispensa indicheremo con un unico simbolo E sia la forza elettromotrice che la tensione magnetica
(quest’ultima dovrebbe essere indicata con U ) e con un unico simbolo Fm sia la forza
magnetomotrice che la tensione magnetica (quest’ultima dovrebbe essere indicata con
Um ). La tensione elettrica si deve utilizzare quando esiste il potenziale elettrico V e
la tensione magnetica si deve utilizzare quando esiste il potenziale scalare magnetico
Vm .
10
INDICE
Tavola I: Le grandezze fondamentali dell’elettromagnetismo. Le variabili
sottolineate denotano le grandezze globali. Le parentesi quadre indicano
le funzioni di dominio, le tonde le funzioni di punto.
~ P)
E(t,
campo elettrico
U [L]
tensione elettrica
Z
U[T, L]
impulso di tensione elettrica
E[L]
forza elettromotrice
E[T, L]
impulso di forza elettromotrice
~ P)
B(t,
induzione magnetica
Φ[I, S]
flusso magnetico
~ · dL
~
E
U=
U=
Z
L
U dt
ZT
~ · dL
~
E
E=
E=
L
Z
E dt
T
Z
~ · dS
~
B
Φ=
S
~ P)
J(t,
densità di corrente
I[S̃]
corrente elettrica
Z
I=
S̃
f
Q [T̃, S̃]
flusso di carica
~
~j · dS
Z
f
Q =
I dt
T̃
ρ(t, P)
densità elettrica
Qc [Ĩ, Ṽ]
carica contenuta
Qc =
Z
ρ dV
Ṽ
~ P)
H(t,
campo magnetico
Um [L̃]
tensione magnetica
Um [T̃, L̃]
impulso di tensione magnetica
Fm [L̃]
forza magnetomotrice
Fm [T̃, L̃]
impulso di forza magnetomotrice Fm =
~ P)
D(t,
densità di flusso elettrico
Ψ [Ĩ, S̃]
flusso elettrico
Z
Um =
Z
Um =
L̃
ZT̃
Fm =
L̃
Z
T̃
Z
Ψ=
S̃
~ · dL
~
H
Um dT
~ · dL
~
H
Fm dt
~ · dS
~
D
Capitolo 1
Introduzione
Questa dispensa si rivolge a coloro che conoscono già l’elettromagnetismo.
Lo scopo che ci proponiamo è solo quello di presentare le grandezze e le equazioni
del campo elettromagnetico secondo un ordine molto pedagogico anche se poco usato,
mettendo in risalto alcune caratteristiche solitamente lasciate in penombra quando
non addirittura ignorate1 .
Vengono richiamati i fatti sperimentali che servono ad introdurre le principali
grandezze fisiche e le principali leggi del campo.
Un primo obiettivo è quello di definire in modo operativo le principali grandezze
usate nell’elettromagnetismo dividendole in due grandi classi: le variabili di “configurazione” e quelle di “sorgente”. Questa distinzione è indispensabile per una
formulazione finita dell’elettromagnetismo a partire dai fatti sperimentali.
Un secondo obiettivo è quello di mettere in evidenza che le grandezze “globali”
sono associate agli “elementi” spaziali e temporali.
Un terzo obiettivo è quello di distinguere le equazioni di “struttura” da quelle
“costitutive”, cosa che spesso viene omessa nella presentazione tradizionale.
La situazione attuale. Le leggi del campo elettromagnetico sono state descritte
da Maxwell mediante equazioni differenziali. Esse possono anche essere scritte
in forma integrale effettuando integrazioni su linee, superfici, volumi ed intervalli
di tempo. In tempi più recenti si è constatato che, sempre nell’ambito differenziale,
un linguaggio più naturale è quello delle forme differenziali esterne. Nel seguito
parleremo di formulazione differenziale per intendere sia la formulazione con equazioni
differenziali che quella con forme differenziali.
La risoluzione numerica delle equazioni dell’elettromagnetismo necessita di una
1
Questa presentazione prende lo spunto dalla scuola tedesca che fa capo al fisico sperimentale
Pohl ed al fisico teorico Mie [43], [44]. Si veda anche Sommerfeld [59, p.10].
11
12
CAPITOLO 1. INTRODUZIONE
formulazione finita. Questa è attualmente ottenuta mediante discretizzazione delle
equazioni differenziali.
È lecito porsi la domanda:
è possibile scrivere direttamente le leggi del campo elettromagnetico in
forma finita senza passare attraverso la formulazione differenziale?
Mostreremo che questo è possibile in modo molto semplice e nel contempo faremo
vedere come la formulazione finita metta in luce alcune caratteristiche delle grandezze
fisiche e delle equazioni che sono spesso trascurate e talvolta addirittura ignorate dalla
formulazione differenziale.
Le grandezze integrali dell’elettromagnetismo si possono ordinare secondo lo schema della tavola (I). Esse possono essere divise in due classi2 .
Tavola I: Variabili integrali dell’elettromagnetismo.
variabili di configurazione
(SI units: weber)
variabili di sorgente
(SI units: coulomb)
Z Z
prod. di carica elettr. Qp =
funzione di gauge χ
impulso potenziale elettr. V =
Z
momento elettrocinetico p =
impulso di tens. elettr. E =
Z
flusso magnetico Φ =
S
σ dV dt
Z
T̃ Z
Ṽ
V dt
~ · dL
~
A
ZLZ
~ · dS
~
B
Z Z
T S
Z
~k · dS
~ dt
c
contenuto di carica magn. G =
prod. carica magn. Gp =
g dV
U
τ dV dt
Ṽ
~ dt
J~ · dS
flusso di carica elettr. Qf =
Z
T̃ S̃
S̃
~ · dS
~
D
impulso tens. magn. Fm =
flusso di carica magn. Gf =
ρ dV
Z Z
~ · dL
~ dt flusso elettr. Ψ =
E
T L
Z Z
contenuto di carica elettr. Qc =
T
Z
(nessun nome) α =
L̃
Z Z
~ · dL
~ dt
H
T̃ L̃
~
T~ · dL
impulso pot. scal. magn. Vm =
Z
T̃
Vm dt
(nessun nome) η
T V
La prima classe è formata da quelle variabili che descrivono la “configurazione”
del campo, quali il potenziale scalare e vettore, nonché da quelle ad esse legate da
operazioni di prodotto o divisione per lunghezze, aree, volumi e durate. Queste
verranno chiamate variabili di configurazione e sono collocate sulla sinistra della
tavola.
2
Il termine electrokinetic momentum è usato da Maxwell [42, § 585 e § 590].
13
Tavola II: Una classificazione delle variabili dell’elettromagnetismo.
variabili di configurazione
funzione di gauge χ
potenziale elettrico V
impulso di potenziale elettrico V
tensione elettrica U
impulso di tensione elettrica E
~
vettore campo elettrico E
flusso magnetico Φ
~
induzione magnetica B
~
potenziale vettore magnetico A
momento elettrocinetico p
variabili di sorgente
flusso di carica elettrica
contenuto di carica elettrica
corrente elettrica
densità di corrente
flusso (di)elettrico
induzione elettrica
intensità del campo magnetico
tensione magnetica
impulso di tensione magnetica
potenziale scalare magnetico
polarizzazione dielettrica
vettore magnetizzazione
variabili energetiche
lavoro
calore
densità di energia elettrica
- densità di energia magnetica
vettore di Poynting
quantità moto elettrom.
densità di quantità di moto
azione elettromagnetica
W
Q
ue
um ~
S
~
G
~g
A
Qf
Qc
I
J~
Ψ
~
D
~
H
Fm
Fm
Vm
P~
~
M
14
CAPITOLO 1. INTRODUZIONE
La seconda classe è formata da quelle variabili che descrivono le “sorgenti” del
campo, quali cariche e correnti, nonché da quelle ad esse legate da operazioni di
prodotto o divisione per lunghezze, areee, volumi e durate. Queste verranno chiamate
variabili di sorgente e sono collocate sulla destra della tavola.
Il prodotto di una variabile di sorgente per una di configurazione fornisce una
variabile energetica, quali la potenza, l’energia, l’azione, come mostra la tavola
(II). In particolare il prodotto di due grandezze integrali delle due classi fornisce una
azione3 .
Una constatazione fondamentale è che tutte le grandezze integrali di una stessa
classe hanno le stesse dimensioni fisiche e quindi per tutte esse si può usare la medesima unità di misura. Le variabili di configurazione hanno le dimensioni di un flusso
magnetico, quelle di sorgente hanno le dimensioni di una carica elettrica.
Si nota dalla tavola che nelle grandezze di sorgente gli elementi spaziali e quelli
temporali sono dotati di una tilde: questo indica che l’elemento spaziale o temporale
è dotato di orientazione esterna, come spiegheremo nella sezione (5.4).
1.1
Definizione operativa
La tavola (I) mostra il legame tra le grandezze integrali e le funzioni di campo. In
questa sezione ci proponiamo di introdurre operativamente alcune grandezze integrali
senza costruirle a partire dalle funzioni di campo: per questa ragione useremo il ter~ eB
~ vengono
mine grandezze globali. Nella presentazione tradizionale i vettori E
introdotti riferendosi alla forza esercitata su una carica di prova rispettivamente in
quiete ed in moto. Successivamente per lo studio dei mezzi materiali vengono intro~ e H.
~ Questo porta a pensare che nel vuoto l’introduzione dei
dotti i due vettori D
~
~
vettori D ed H risulti inutile. Al punto che alcuni autori davano come definizione nel
~ =E
~ ed H
~ =B
~ 4 . Altri autori fanno invece una distinzione sostanziale tra i
vuoto D
~ eB
~ da una parte e D
~ eH
~ dall’altra5 .
vettori E
Come mostreremo in questo lavoro la formulazione discreta diretta dell’elettromagnetismo richiede come punto di partenza le grandezze globali, che sono scalari, non
i vettori di campo. Questo ci condurrà, nel passaggio alla formulazione differenziale,
~ B
~ da una
ad effettuare in modo naturale una distinzione sostanziale tra i vettori E,
6
~ H
~ dall’altra valida anche nel vuoto.
parte e D,
3
Col nome di “azione” si intende l’integrale nel tempo di una energia
Abraham [1]; Lorentz
5
Fra essi Langevin [35]; Mie [43] [44]; Sommerfeld [59, p.9]; Van Dantzig [71]; Post [54]. La
~ ed H
~ devono essere riguardati
International Electrotecnical Commission nel 1930 ha stabilito che B
come fisicamente differenti. Si veda anche [17, p.163]
6
Il fatto che, secondo l’elettrodinamica quantistica, il “vuoto” abbia una sua complessità (fotoni
virtuali, polarizzazione del vuoto) al punto da far ritenere che la prima coppia di vettori sia distinta
dalla seconda coppia e che su questo si fondino esperimenti in corso [83] indica che la identificazione
4
1.2. LE SORGENTI DEL CAMPO
15
Una caratteristica della attuale presentazione è quello di effettuare una separazione netta tra le equazioni di “struttura”, che sono di validità globale e indipendenti
dalla metrica usata nello spazio, dalle equazioni “costitutive” che hanno, al contrario
delle precedenti, validità locale, che dipendono dalla metrica e dal mezzo materiale
includendovi come caso limite il vuoto7 .
1.2
Le sorgenti del campo
• La carica elettrica in quiete è la sorgente del campo elettrico;
• le cariche elettriche in moto stazionario (correnti costanti) sono le sorgenti del
campo magnetico;
• le cariche elettriche in moto non stazionario (correnti variabili) sono le sorgenti
del campo elettromagnetico.
La variazione di un campo magnetico, anche se lenta, produce un campo elettrico
(induzione elettromagnetica). In modo simmetrico la variazione di un campo elettrico
produce un campo magnetico il quale però è rilevabile solo se la variazione avviene a
frequenze dell’ordine delle radioonde (corrente di spostamento).
Questo consente di dividere lo studio dell’elettromagnetismo in stadi:
• elettrostatica;
• magnetostatica;
• conduzione elettrica;
• campi lentamente variabili (tipico dell’elettrotecnica);
• campi rapidamente variabili (tipico della radiotecnica)
tra le due coppie di vettori nel vuoto è inopportuna e che la presentazione che svilupperemo è in
armonia con l’elettrodinamica quantistica.
7
Questa separazione delle equazioni del campo elettromagnetico in due classi è stata effettuata
da Van Dantzig [71]. Vedere anche [72, p.86].
16
CAPITOLO 1. INTRODUZIONE
Capitolo 2
Elettrostatica
2.1
La carica Q: sorgente del campo elettrico
La grandezza fondamentale dell’elettricità è la carica elettrica: essa è la sorgente del
campo elettrico. La presenza della carica elettrica si manifesta mediante l’attrazione
e la repulsione di corpi carichi. Essa è una grandezza addittiva. Di qui ne viene che il
confronto tra due cariche si può fare confrontando la forza che si esercita fra ciascuna
carica ed una carica campione. È questo il punto di partenza tradizionale.
Senonché è possibile misurare le cariche approfittando della loro attrazione e repulsione senza misurare direttamente la forza. È sufficiente un elettro-scopio ad ago
connesso ad un pozzo di Faraday provvisto di scala graduata. Disponendo di n cariche identiche, inserendole nel pozzetto di Faraday in successione e registrando le
successive deviazioni dell’ago sulla scala graduata si ottiene un elettro-metro. Con
esso è facile misurare la carica totale posseduta da un corpo. Si noti che una misura
della forza presuppone la taratura ovvero l’uso di un dinamometro, cosa che non è
affatto richiesta per tarare un elettroscopio.
Da un punto di vista spaziale1 si hanno due forme della carica: quella contenuta,
Qc e quella che fluisce, Qf . La carica contenuta è associata ad un volume dotato
di orientazione esterna (normali uscenti o entranti) e questo verrà indicato con la
notazione Qc [Ṽ]. Si noti che la locuzione “orientazione esterna” per un volume indica
quella di attraversamento della sua superficie di bordo, non il fatto che le facce siano
uscenti (possono essere anche entranti). La carica fluente, il cui tasso si chiama
corrente, ha la proprietà di suscitare un campo magnetico e quindi di far deviare un
ago magnetico. Questo consente di fare una misura dinamica della carica che fluisce
1
Nella dinamica dei fluidi si utilizzano due punti di vista: quello materiale o Lagrangiano e
quello spaziale o Euleriano. Quando parliamo di carica posseduta da un corpo siamo nel punto di
vista materiale mentre quando facciamo riferimento ad una regione di spazio o volume di controllo
e consideriamo la carica contenuta nel volume e quella fluente attraverso il bordo del volume siamo
nel punto di vista spaziale.
17
18
CAPITOLO 2. ELETTROSTATICA
Q f con un galvanometro balistico. Quest’ultimo misura il flusso di carica transitato
lungo un filo in un assegnato intervallo. Questo implica che il corpo sul quale si trovava
la carica Q sia scaricato e che la carica venga raccolta dallo strumento. Misurando la
carica contenuta su un conduttore e quella che fluisce quando questo viene scaricato
si constata che esse sono uguali: questo fatto esprime la legge di conservazione della
carica.
2.2
La prima legge dell’elettrostatica
La prima legge dell’elettrostatica coinvolge le seguenti variabili fisiche
• il flusso elettrico Ψ ;
~
• il vettore induzione elettrica D.
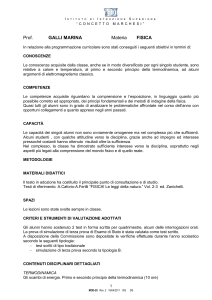
La prima legge. Faraday scoprı̀ che se una carica q è racchiusa entro un involucro
sferico metallico neutro, una carica uguale e dello stesso segno appariva sulla superficie
della sfera. Egli verificò che il campo esterno è simmetrico indipendentemente dal
fatto che la sfera sia concentrica con la carica.
Se la carica esterna è rimossa
+
+
+
-
-
-
+
+
+
-
-
-
+
+
+
+
-
-
-
+-
-
+
-
-
-
+
+
+
+
+
+
Figura 2.1: La carica indotta sulla superficie esterna di un involucro metallico è
uguale a quella contenuta (figura tratta da Schelkunoff [56, p.24])
mettendo momentaneamente a terra l’involucro sferico, una carica uguale e di segno
opposto a quella interna si raccoglie sulla parte interna e può essere misurata [56,
p.24].
La carica raccolta sulla superficie esterna dell’involucro metallico:
• non dipende dal mezzo che contorna la carica;
• non dipende dalla forma dell’involucro metallico;
2.2. LA PRIMA LEGGE DELL’ELETTROSTATICA
19
• non dipende dalla dimensione dell’involucro metallico.
Questa legge della induzione elettrostatica costituisce il punto di partenza sperimentale di quella che noi chiamiamo oggi legge di Gauss.
Possiamo esprimere a parole il risultato di questa esperienza: la carica elettrica che
si raccoglie sulla superficie esterna di qualunque guscio metallico chiuso contenente
delle cariche elettriche è uguale alla carica totale contenuta.
2.2.1
Induzione elettrostatica
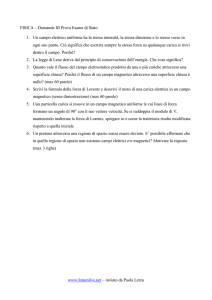
Flusso elettrico Ψ . Disponendo una superficie metallica di forma arbitraria, chiusa
o aperta, si raccolgono per induzione due cariche elettriche di segno opposto sulle due
facce della superficie. Fissata una faccia come positiva, la carica che si raccoglie su
essa si chiama flusso elettrico e si indica con la lettera Ψ . Avendo fissato una faccia
come positiva è come se avessimo fissato un senso di attraversamento della superficie
e quindi una orientazione esterna: per questo motivo indicheremo con S̃ la superficie
e con S̃ la sua area.
Se si dispone un dischetto metallico in un generico punto del campo elettrico
si determinano per induzione elettrostatica due cariche opposte +Ψ e −Ψ sulle sue
facce. Tali cariche dipendono dal punto in cui è posto il centro del dischetto, dalla sua
giacitura Fig.(2.3) e dalla sua area.
Per piccole lamine la carica Ψ (in coulomb)
flfl Ψ
flusso elettrico
Q
elettrometro
Q
campo nullo
internamente
sonda
S̃
f)
misuro la caricaγ
S̃
Ĩ
Figura 2.2: Il flusso Ψ che si raccoglie sui due dischetti dipende dalla giacitura.
Fissata una faccia come positiva, il flusso elettrico è la carica che si raccoglie su di
essa.
risulta sensibilmente proporzionale all’area. Il rapporto
def
σ =
Ψ
S̃
(C/m2 )
(2.1)
20
CAPITOLO 2. ELETTROSTATICA
-
- ++
+ Ψ
- - ++
+
~n0
Ψ
-- - -
~n
~n
α
++
+ ++
~n0
α
Ψ
+
+ + +
~n0
Figura 2.3: La misura del flusso elettrico su un elemento di superficie dotato di
orientazione esterna. (Schelkunoff [56, p.25])
prende il nome di densità media di carica superficiale. Nella formulazione differenziale
tutte le volte che formiamo una densità (lineare, areale, volumica) facciamo tendere
a zero l’area e quindi definiamo come densità il limite della densità media. In questo
caso
Ψ
def
σ = lim .
(2.2)
S̃→0 S̃
Osservazione. Molte persone ritengono che una quantità “piccola” debba essere preceduta da un simbolo d o δ. Cosı̀ scrivono δW, dW per indicare un piccolo lavoro, δS, dS
per indicare una piccola area, δV, dV per indicare un piccolo volume, ecc. Questo non è
affatto necessario e per giunta è sconveniente. Il tipico infinitesimo della matematica viene indicato con il simbolo ² o η e non con δ² o δη 2 . Ad esempio il primo principio della
termodinamica che molti scrivono nella forma
δQ + δW = dU
(2.3)
può benissimo essere scritto nella forma [26, p.40]
q + w = dU
2.2.2
e nel finito
Q + W = ∆U
(2.4)
La misura di Ψ
In un campo elettrostatico si consideri una sonda costituita da due lamine metalliche
piane identiche provviste di due manici isolanti3 . Mettendole a contatto, come indicato in figura (2.2), per induzione si determina una concentrazione di cariche opposte
sulle facce esterne delle lamine. Allontanando le due lamine le cariche indotte rimangono imprigionate sulle due lamine e si possono misurare. Fissando ad arbitrio una
delle due facce (o una delle due lamine) come positiva, la carica raccolta sulla faccia
positiva è definita come flusso elettrico e la si indica con Ψ . Si ha quindi
def
Ψ = carica sulla faccia positiva
2
definizione del flusso elettrico
(2.5)
È però vero che nella teoria dell’integrazione si continuano ad usare i simboli dL, dS, dV sotto
segno di integrazione.
3
See [24, p.71]; Fleury-Mathieu [23, p.61]; Maxwell [41, p.47]; Rojansky [55, p.230]; Schelkunoff
[56, p.25]; Jefimenko [32, p.80; p.225].
2.2. LA PRIMA LEGGE DELL’ELETTROSTATICA
21
È essenziale il fatto che la carica raccolta sulla superficie non dipende dal materiale
di cui è fatto l’involucro: questo consente di assegnare un flusso elettrico direttamente
alla superficie geometrica. Inoltre si constata che il flusso elettrico non dipende dal
mezzo. Questo si può vedere ripetendo la misura dopo aver immesso del petrolio
nella regione ove si fa la misura [23, p.85]. Questa è una informazione preziosa che è
comunemente ignorata nei libri di fisica.
Per definire il segno del flusso si sceglie una delle due lamine come principale,
ovvero si fissa una faccia della superficie come positiva, fissando una orientazione
esterna della superficie oppure fissando una normale alla superficie e considerando
positiva la faccia da cui la normale esce. È chiaro che il flusso elettrico cosı̀ definito
cambia segno al cambiare dell’orientazione esterna alla superficie:
Ψ (−S̃) = −Ψ (S̃)
2.2.3
condizione di disparità di Ψ .
(2.6)
~
Il vettore induzione D
Lo scopo della definizione di una densità è quello di liberarsi dall’estensione dell’ente
spaziale (linea, superficie o volume) per ridursi a punti. Il ruolo di una densità è
analogo a quello della formazione del prezzo come rapporto costo/quantità: si ottiene un indicatore indipendente dalla quantità e che svolge il ruolo di un fattore
moltiplicativo.
Rimane ancora la dipendenza dalla giacitura: come liberarsene? Dal momento che
la giacitura è descritta dal versore ~n l’idea è di creare un vettore ~v (P ) dipendente
solo dal posto, tale che si possa effettuare la fattorizzazione
σ(P, ~n) = ~v (P) · ~n.
(2.7)
Come farlo? Innanzi tutto consideriamo che fra le infinite giaciture passanti per un
punto ve ne sarà una per la quale σ è massima e vale σmax . Si constata sperimentalmente che, indicata con ~nmax la normale per la quale questo si realizza, per ogni
altra giacitura ~n vale la relazione
σ(P, ~n) = σmax (P) cos(α) = σmax (P) (~nmax · ~n).
(2.8)
Ecco che la doppia dipendenza dal punto P e dalla normale ~n viene fattorizzata
nel prodotto di due quantità σmax (P) ~nmax ed ~n. È naturale allora definire un vettore
~ def
D
= σmax (P) ~nmax
(2.9)
cui si dà il nome di vettore induzione elettrica. Questo vettore dipende solo dal posto.
Ora potremo scrivere la relazione (2.8) nella forma
~
σ(P, ~n) = D(P)
· ~n.
(2.10)
22
CAPITOLO 2. ELETTROSTATICA
È allora ovvio che il flusso elettrico che si forma sulla faccia positiva, scelta per
convenzione, si può esprimere nella forma
Z
Ψ [S̃] =
S̃
~
~
D(P)
· d S.
(2.11)
Questa relazione non deve essere presa come definizione del flusso bensı̀ come defini~ Perché? Perché il flusso Ψ si misura direttamente mentre D
~ si
zione del vettore D.
valuta come rapporto. È il flusso la grandezza globale associata alla superficie: il vet~
tore induzione elettrica D(P)
è solo una sorte di ”prezzo” vettoriale che ha il pregio
di non dipendere né dalla giacitura né dalla misura dell’elemento piano di superficie
~
d S.
Il flusso elettrico è una grandezza associata alla superficie, è una funzione di
~
dominio mentre D(P)
è una funzione del punto. Per indicare che una grandezza è
funzione d’insieme si usano le parentesi quadre: Q[Ṽ], Ψ [S̃].
Ne viene che la legge dell’induzione elettrostatica di Faraday si può esprimere
dicendo che
Prima legge dell’elettrostatica: il flusso elettrico Ψ relativo al
bordo di un volume Ṽ è uguale alla carica elettrica Q contenuta nel volume
Ṽ.
Ricordando che il bordo di un volume, inteso come regione di spazio e non come
misura della regione di spazio, si indica con ∂ Ṽ scriveremo la legge dell’induzione
elettrostatica di Faraday nella forma finita
Ψ [∂ Ṽ] = Q[Ṽ]
♠
(2.12)
Le lamine metalliche e gli involucri di materiale conduttore hanno un ruolo fondamentale nella formazione delle nozioni del campo elettromagnetico in quanto, essendo conduttori, consentono la distribuzione delle cariche libere nelle diverse regioni
del conduttore. E questa distribuzione dipende dalla forma e dalle dimensioni del
conduttore ma è indipendente dalla natura del materiale che forma il conduttore.
Questa indipendenza dal materiale consente l’ardita estrapolazione di associare le
cariche superficiali ad una superficie geometrica invece che ad un conduttore.
2.2.4
Il teorema di Gauss
Utilizzando la relazione (2.11) potremo scrivere la legge di induzione elettrostatica di
Faraday (2.12) nella forma
Z
∂ Ṽ
~
~ = Q[Ṽ].
D(P)
· dS
(2.13)
2.2. LA PRIMA LEGGE DELL’ELETTROSTATICA
23
Qualora la carica Q[Ṽ] sia distribuita entro Ṽ potremo scrivere
Z
Q[Ṽ] =
ρ(P) dV.
(2.14)
Ṽ
e la legge in questione si può esprimere
Z
∂ Ṽ
~
~=
D(P)
· dS
Z
ρ(P) dV.
(2.15)
Ṽ
Rimpicciolendo indefinitamente il volume Ṽ attorno ad un punto P arriveremo a
scrivere
Z
~
~ 0) · d S
D(P
∂ Ṽ
ρ(P) = lim
.
(2.16)
Ṽ →0
Ṽ
Il secondo membro è una grandezza scalare a cui si dà il nome di divergenza del
~ e si scrive
vettore D
~
ρ = div D
oppure
~
ρ = ∇ D.
(2.17)
Questa è la forma matematica data da Gauss alla legge dell’induzione elettrostatica
di Faraday. È evidente che essa descrive la legge sperimentale sotto due pesanti
condizioni:
1. la carica elettrica deve essere distribuita pur ammettendo discontinuità. Una
carica “puntiforme” non è tollerata
~ deve essere continuo e derivabile entro ogni volume Ṽ. Questo non
2. il vettore D
accade quando vi sono due materiali diversi e il volume si trova a cavallo delle
superfici di separazione.
La formulazione integrale (2.15) è quindi più restrittiva della formulazione (2.12) in
~ può essere discontinuo su S̃ ma non ammette cariche puntiformi.
quanto il vettore D
La formulazione differenziale (2.17) è ancor più restrittiva della formulazione integrale
(2.15) in quanto soggetta alle due limitazioni suddette. Ne viene che la formulazione
finita (2.12) è più aderente al fatto fisico della formulazione in quanto non contiene
limitazioni di natura matematica.
Osservazione. Quantunque una carica puntiforme non abbia senso fisico torna spesso
comodo fare un modello puntiforme delle cariche elettriche libere, gli elettroni. Se poi si
scopre che il campo generato da una carica puntiforme ha una energia infinita la colpa
dell’infinito non fisico non è della carica (elettrone) ma del modello che ne abbiamo fatto.
Ogni modello vale sotto certe condizioni, entro certi limiti!
Volendo trattare teoricamente cariche puntiformi si può far uso della teoria delle distribuzioni e rappresentare una carica puntiforme e mediante la distribuzione δ(P ). L’integrale
24
CAPITOLO 2. ELETTROSTATICA
allora non è più secondo Lebesgue ma diventa solo un simbolo per indicare un funzionale
lineare e continuo. La relazione (2.15) deve allora intendersi nel senso della teoria delle
distribuzioni ovvero delle funzioni generalizzate [Ligthill][Vekua]. Con questo formalismo
si può trattare bene la teoria dell’elettromagnetismo ma non si può certo fare dell’analisi
numerica. La relazione (2.15), intesa nel senso della teoria delle distribuzioni, ha la stessa
generalità della relazione (2.12).
La teoria delle distribuzioni, nota anche come teoria delle funzioni generalizzate, è nata con lo scopo di estendere la notazione differenziale a funzioni che non sono derivabili,
quali la funzione a gradino introdotta dall’ingegner Heaviside. In un primo tempo è stata
usata formalmente dall’ingegnere elettrotecnico e fisico P.A.M. Dirac ma solo nel 1955 il
matematico francese Laurent Schwarz le diede un vestito matematico rigoroso.
Una distribuzione è un funzionale lineare e continuo sullo spazio delle funzioni di classe C0∞ , cioé delle funzioni infinitamente derivabili (donde il simbolo di ∞ come apice) e
a supporto compatto, ovvero diverse da zero in una regione (=supporto) chiuso (=contenente i suoi punti di accumulazione) e limitato. Le funzioni generalizzate però, a differenza delle funzioni ordinarie, non si possono moltiplicare fra loro, non possono dotarsi
di norma, non possono essere approssimate con successioni di funzioni e quindi non sono
trattabili numericamente. Esse quindi non possono essere utilizzate nell’elettromagnetismo
computazionale.
2.3
La seconda legge dell’elettrostatica
La seconda legge dell’elettrostatica coinvolge le seguenti variabili fisiche
~
• il vettore campo elettrico E
• la tensione elettrica U ;
• il potenziale elettrico V .
2.3.1
~
Il vettore E
La constatazione che le cariche si attraggono o si respingono suggerisce di istituire una
grandezza fisica che misuri l’intensità di questa azione. Si constata che, in presenza
di un campo elettrico, una carica elettrica “esploratrice” q posta in un generico punto
di un campo elettrico subisce una forza F~ .
Tale forza dipende da q : F~ (q) e si annulla per q = 0.
Osservazione. Una funzione di una variabile y(x) che si annulla per x = 0 ammette
una rappresentazione
y = a x + b x2 + c x3 + ...
(2.18)
in cui a è il primo coefficiente significativo. Per x piccolo vale l’approssimazione
y = a x.
(costo=prezzo × quantità)
(2.19)
2.3. LA SECONDA LEGGE DELL’ELETTROSTATICA
25
Ne viene che il coefficiente a gioca il ruolo del prezzo di una merce. Si può scrivere
a = lim
x→0
y(x)
.
x
(2.20)
La forza F~ dipende dal posto e dalla carica esploratrice q e può esprimersi nella
forma
2
3
~
~
~
+ S(P)q
+ .....
(2.21)
F~ (P, q) = E(P)q
+ G(P)q
~ G,
~ S,
~ .... dei vettori. In particolare se q è piccolo vale l’approssimazione
Essendo E,
essendo
~
F~ (P, q) = E(P)
q
(2.22)
F~ (P, q)
def
~
E(P)
.
= lim
q→0
q
(2.23)
~
Nasce cosı̀ il vettore campo elettrico E.
Osserviamo che introducendo una carica esploratrice in un campo elettrico preesistente si altera la posizione delle cariche che generano il campo [52, p.39]. Ne viene
che il semplice rapporto F~ /q dà una misura del campo alterato dalla presenza della
carica di prova. Esso costituisce una misura del campo preesistente in una delle tre
ipotesi seguenti [Schelkunoff] [56, p.8]:
• Le sorgenti del campo sono tenute fisse;
• il punto in cui è posta la carica esploratrice è cosı̀ lontano dalle cariche che
generano il campo da non influenzare la loro posizione;
• la carica elettrica è cosı̀ piccola da non influenzare la posizione delle sorgenti.
Dal momento che l’alterazione è tanto più piccola quanto minore è il valore della carica
di prova si è portati a fare il limite del rapporto come nella (2.23). L’operazione
di limite si scontra però con il fatto che la carica più piccola conosciuta è quella
dell’elettrone e quindi l’operazione di limite, voluta dalla matematica, è in contrasto
con la fisica. Come sempre ci si deve accontentare di fare un modello del campo
ignorando la natura discreta della carica elettrica. Einstein ha detto: “l’elettrone è
uno straniero nell’elettromagnetismo” [59, p.236].
2.3.2
Equazione costitutiva D−E
Per lo studio del campo elettrico abbiamo introdotto due vettori
~ che descrive la distribuzione di carica su una superficie conduttrice;
1. il vettore D
26
CAPITOLO 2. ELETTROSTATICA
~ che descrive la forza su una carica esploratrice.
2. il vettore E
È naturale attendersi che vi sia una relazione tra i due vettori. Ad esempio una
relazione finita del tipo
~ = D(
~ E).
~
D
(2.24)
dipenderà dal mezzo nel quale si trova il campo e costituisce una equazione costitutiva
o materiale.
Consideriamo infatti un condensatore a facce piane parallele (le armature) separate da un dielettrico che sia omogeneo ed isotropo. Il dielettrico deve essere sottile, cosı̀
da poter trascurare gli effetti ai bordi, oppure il condensatore deve essere provvisto
d’anelli di guardia o essere sferico, con dielettrico sottile. Il campo elettrico fra le
armature è allora sensibilmente uniforme, sopratutto nella eegione centrale, ed è dato
da E = U/d.
U
def Ψ
D =
E= .
(2.25)
S
d
In questo modo si constata sperimentalmente che nel vuoto ed in un mezzo i due
~ ed E
~ hanno la stessa direzione e lo stesso verso.
vettori D
~ ∝ E.
~
D
(2.26)
Introducendo una costante materiale ε potremo scrivere la proporzionalità precedente
nella forma
~ = ε E.
~
D
(2.27)
La ε si chiama costante dielettrica.
Osservazione. La relazione (2.27) esprime una legge in quanto afferma la equidirezionalità dei due vettori e la loro proporzionalità ma al tempo stesso definisce la costante del
mezzo ². Sarebbe improprio chiamarla equazione di definizione. Allo stesso modo la legge di
Ohm U = RI esprime una legge in quanto afferma la proporzionalità di I e U ma al tempo
stesso definisce la resistenza R del conduttore. Sarebbe improprio chiamarla equazione di
definizione. Questo fatto è caratteristico di tutte le equazioni costitutive: mentre esprimono
un comportamento consentono di definire e quindi di misurare un parametro del mezzo.
La costante dielettrica nel vuoto è indicata con ε0 .
~ = ε0 E
~
D
2.3.3
nel vuoto
(2.28)
Il vettore polarizzazione P~
~ può avere o non avere la direzione di E
~ ed inoltre
Nella materia, invece, il vettore D
~ nella materia ed il
può essere lineare o non lineare. La differenza tra il vettore D
~
vettore D nel vuoto descrive la natura e le proprietà del materiale. Posto
def ~ ~
~
P~ (E) = D(
E) − ε0 E
(2.29)
2.3. LA SECONDA LEGGE DELL’ELETTROSTATICA
27
chiamiamo P~ il vettore polarizzazione del dielettrico. In molti dielettrici il vettore
~ ha la direzione di E
~ ed è proporzionale ad E,
~ (come nel vuoto). Possiamo
P~ ( E)
allora scrivere
law
~
P~ (E) = ε0 χ E
che caratterizza molti dielettrici.
(2.30)
Ne viene che per questi dielettrici vale la relazione costitutiva
~ E)
~ =
D(
=
=
=
~
~ + ε0 χ E
ε0 E
~
ε0 (1 + χ) E
.
~
ε 0 εr E
~
εE
(2.31)
~ non ha la stessa direzione di E
~ si dicono anisotropi.
I dielettrici per i quali P~ ( E)
~ ha la direzione di E
~ ma non vale la proporzionalità si dicono
Quelli per i quali P~ ( E)
non lineari.
2.3.4
La legge di Coulomb
Una conseguenza della equazione costitutiva è la legge di Coulomb: essa si ottiene
~ e
applicando la legge dell’induzione elettrostatica di Faraday4 che porta a definire D
~
l’equazione costitutiva che permette di ricavare E.
Applichiamo la legge dell’induzione elettrostatica di Faraday ad una carica a simmetria sferica Q che si trovi in un mezzo omogeneo ed isotropo. Se consideriamo una
superficie sferica ∂V che abbia il suo centro nel centro della carica, potremo scrivere
Ψ [∂ Ṽ] = Q.
(2.32)
~ sarà normale alla superficie e di uguale modulo
Per ragioni di simmetria il vettore D
in tutti i punti della superficie sferica. Potremo allora scrivere il flusso
Ψ [∂ Ṽ] = 4πr2 D.
(2.33)
Combinando le due ultime equazioni si ottiene
D=
Q
.
4πr2
(2.34)
Poichè nel vuoto vale l’equazione costitutiva (2.27) ne viene
E=
4
1 Q
D
=
.
ε0
4πε0 r2
(2.35)
Schelkunoff: “Coulomb’s law can be derived from Faraday’s law of electrostatics induction.”[56,
p.24]
28
CAPITOLO 2. ELETTROSTATICA
~ ed E
~ hanno la stessa direzione e della relazione di definzione di
Tenuto conto che D
~
E ne viene
1 Qq ~r
F~ =
(2.36)
4πε0 r2 r
che è la legge di Coulomb.
In questa deduzione la legge di Coulomb è conseguenza della legge di induzione
~ e della legge costitutiva del
elettrostatica di Faraday, della creazione del vettore D
vuoto.
Osservazione. Alcuni autori si pongono la domanda del perché la forza sia inversamente proporzionale al quadrato del raggio e non, piuttosto, ad una generica potenza del
raggio o ad un’altra funzione del raggio, ad esempio F ∝ exp(−r)/r2 . La legge di induzione
elettrostatica impone che il flusso elettrico sia uguale alla carica contenuta. Nel caso di una
carica a simmetria sferica ne viene che, per la supposta omogeneità ed isotropia del mezzo,
la densità σ = D deve essere uniforme sulla superficie di una sfera concentrica alla carica e
quindi deve essere σ = Q/(4πr2 ). Il quadrato del raggio è quindi immediata conseguenza
della uniforme distribuzione della densità elettrica sulla sfera.
La legge di Coulomb non vale se il mezzo è inomogeno o anisotropo. In particolare non vale se il mezzo è formato da materiali diversi. Vedremo fra poco che dalla
legge di Coulomb si potrà indurre una proprietà del campo che varrà anche per mezzi
inomogenei e anisotropi e quindi risulterà del tutto indipendente dal mezzo. La proprietà che indurremo costituirà quindi una legge, la seconda legge dell’elettrostatica,
che conterrà la legge di Coulomb come caso particolare.
2.3.5
La tensione elettrica U
~ nasce da una forza e la circolazione di una forza lungo
Dal momento che il vettore E
~ lungo una linea:
una linea dà il lavoro, è naturale considerare la circolazione di E
Z
U [L] =
L
~ · d L.
~
E
(2.37)
La circolazione U [L] associata alla linea prende il nome di tensione elettrica lungo la
linea L.
Osservando che il lavoro W lungo una linea è
Z
W [L, q] =
L
~ =
F~ · d L
Z
L
~ · dL
~ = q U [L]
qE
(2.38)
ne viene che la tensione elettrica è uguale al lavoro per unità di carica.
♣ [FUORI POSTO] Definizione. Ricordiamo che una linea chiusa si dice riducibile
se mediante una deformazione continua, che mantiene sempre la linea nella regione in cui il
campo è definito, si può contrarre ad un punto. È evidente che ogni linea chiusa riducibile
2.3. LA SECONDA LEGGE DELL’ELETTROSTATICA
29
~ è la forza per unità di carica, cosı̀ la tensione
Tavola I: Come il vettore E
è il lavoro per unità di carica.
Z
*
~
F~ (P) = q E(P)
HH
W [L] =
L
j
H
Z
U [L] =
L
~
F~ · dL
~ · dL
~
E
HH
j
H
* W [L] = q U [L]
si può concepire come bordo di una superficie. Due linee chiuse si dicono riconciliabili se
con una deformazione continua si possono portare l’una nell’altra senza farle uscire dalla
regione in cui il campo è definito. Cosı̀ un cappio fatto con una corda se si avvolge attorno
al tronco di un albero non è riducibile; un sentiero che forma un circuito attorno ad un
lago non è riducibile. Due sentieri che partendo da un punto giungano ad uno stesso punto
passando l’uno da una parte di un laghetto l’altro dall’altra parte non sono riconciliabili.
E’ facile constatare che nel campo coulombiano la tensione elettrica lungo una
generica linea chiusa è nulla:
U [∂S] = 0
(2.39)
nel campo coulombiano.
Consideriamo ancora un mezzo omogeneo ed isotropo e in esso il campo elettrico
generato da tante cariche: ritenendo valido il principio di sovrapposizione degli effetti
(si veda pagina 125) ne viene che il campo elettrico in ogni punto del campo è la somma
di quelli generati dalle singole cariche ”puntiformi” che compongono le cariche:
Z
U [∂S] =
∂S
~ · dL
~ =
E
Z
n
X
∂S k=1
~k · d L
~ =
E
n Z
X
k=1 ∂S
~k · d L
~ =
E
n
X
Uk [∂S] = 0.
(2.40)
k=1
Dal momento che ciascuno di questi campi è coulombiano e quindi vale la proprietà
(2.39) ne risulta che nel campo risultante vale la stessa proprietà:
U [∂S] = 0
in un mezzo omogeneo ed isotropo.
(2.41)
Anisotropia. L’anisotropia riguarda la relazione D − E. Dal momento che la ten~ l’eventuale anisotropia del mezzo non ha nessuna
sione è fatta solo con il vettore E
conseguenza sulla validità della relazione (2.41) e quindi
U [∂S] = 0
in un mezzo omogeneo.
(2.42)
Inomogeneità. Consideriamo due mezzi materiali omogenei e la loro superficie di
separazione, come in figura (2.4a). Consideriamo un cammino chiuso, bordo di una
superficie S, che passi da un mezzo all’altro. Esso si può scomporre in due cammini,
30
CAPITOLO 2. ELETTROSTATICA
S''
S'
S
a)
b)
S
c)
Figura 2.4: La tensione elettrica lungo un circuito che attraversa mezzi diversi è
nulla.
l’uno nel primo mezzo e l’altro nel secondo. Indichiamo con S0 ed S00 le due superfici
in cui è decomposta la superfice S, come in figura (2.4b). Avremo separatamente:
U [∂S0 ] = 0
e
U [∂S00 ] = 0.
(2.43)
Dal momento che il pezzo di linea che si trova sulla superfice di separazione viene
percorso due volte in sensi opposti ne viene
U [∂S] = U [∂S0 ] + U [∂S00 ] = 0
in un mezzo inomogeneo.
(2.44)
e quindi anche lungo una linea chiusa che passa attraverso due materiali diversi la tensione è nulla. Questa proprietà vale anche se la linea passa attraverso numerosi mezzi
materiali diversi, come in figura (2.4c). In particolare, un mezzo la cui omogeneità sia
variabile con continuità può essere approssimato con una serie di innumerevoli straterelli infinitesimi con caratteristiche fisiche diverse. Ne viene che anche per materiali
genericamente non omogenei la proprietà (2.41) rimane valida. Quindi
U [∂S] = 0
per qualunque mezzo.
(2.45)
Siamo quindi pervenuti, attraverso un processo di induzione alla
Seconda legge dell’elettrostatica. La tensione elettrica lungo
ogni linea chiusa riducibile è nulla.
Potremo scrivere
law
U [∂S] = 0.
♠
(2.46)
Dal momento che la tensione elettrica lungo una linea è proporzionale al lavoro fatto
muovendo una carica esploratrice ne viene che la seconda legge dell’elettrostatica può
anche essere espressa dicendo che il lavoro fatto per muovere una carica esploratrice
lungo un generico cammino chiuso è nullo.
2.3. LA SECONDA LEGGE DELL’ELETTROSTATICA
2.3.6
31
Il potenziale elettrico
Il fatto che la circolazione lungo ogni linea chiusa riducibile è nulla consente di operare
come segue: fissato ad arbitrio un punto P0 del campo la circolazione da P ad un
generico punto P0 lungo qualsiasi linea L da P a P0 dà
Z
V (P, P0 ) =
P0
P
~ · dL
~ =−
E
Z
P
P0
~ · d L.
~
E
(2.47)
La funzione V (P), definita a meno di una costante arbitraria, prende il nome di
potenziale elettrico nel punto P.
Il modo più naturale di rilevare una tensione fra due corpi carichi è quello di
congiungere i due corpi con un filo conduttore e registrare la presenza di una corrente
lungo un filo. Per misurare la tensione fra due punti di un campo si connettono i
due punti con un filo conduttore. Senonché alle estremità del filo si raccolgono subito
per induzione delle cariche che bilanciano la differenza di potenziale. Occorre quindi
eliminare con continuità tali cariche: questo si può fare ionizzando l’aria circostante
le due estremità con una fiamma o, meglio, con una sostanza radioattiva [52, p.61].
Per istituire la misura della tensione ricordiamo come si opera per misurare una forza.
Una forza si può misurare approfittando del fatto che vi sono corpi deformabili: per rendere
vistosa la deformazione si ricorre ad una molla come campione. Disponendo di tante forze
uguali, ad esempio pesi, si aggiungono successivamente e si rileva di volta in volta l’allungamento della molla campione. Effettuata la taratura la molla campione è divenuta un
dinamometro. Non ha importanza che la molla abbia un allungamento proporzionale alla
forza: è sufficiente che la sua lunghezza abbia un andamento monotono con la forza applicata e che riassuma la stessa lunghezza sotto l’azione della stessa forza. Un secondo modo
di misurare la forza è quello dell’equilibramento con delle forze note. È questo il metodo
usato nella bilancia a stadera. In pratica si tratta di annullare lo spostamento che la forza
tende a produrre con l’azione di un’altra forza nota. È questo il metodo dell’annullamento
dello spostamento.
Torniamo alla misura della tensione elettrica U . Un primo metodo consiste nel
disporre di tante tensioni uguali, ad esempio tante batterie elettriche identiche, e nel
misurare la corrente che passa dopo averle disposte in serie. Lo strumento cosı̀ tarato
diventa un tensiometro elettrico o voltmetro elettrostatico [10].
Un secondo metodo nasce dall’idea di potenziale elettrico, corrispondente alla
nozione di altezza dell’acqua in un vaso. Nel caso dell’acqua si può misurare sia la
quantità di acqua sia l’altezza che il pelo libero assume nel vaso. Se il vaso è cilindrico
l’altezza e la quantità sono proporzionali: il rapporto tra quantità di acqua e altezza
del pelo libero prende il nome di capacità del vaso cilindrico ed ha le dimensioni di
un’area, l’area della sezione retta del vaso.
Nel caso elettrico si può misurare il potenziale di un corpo connettendolo mediante
un filo con un generatore a tensione variabile di cui l’altra estremità è collegata a terra
32
CAPITOLO 2. ELETTROSTATICA
e scegliendo la tensione che annulla la corrente nel filo: è questo il metodo di zero.
La tensione che annulla è, per definizione, il potenziale elettrico V del corpo carico
rispetto alla terra. Si noti che il potenziale, come la temperatura, sono riferiti ad uno
zero convenzionale (la terra ed il ghiaccio fondente rispettivamente).
2.3.7
La misura della tensione in un dielettrico
Consideriamo un campo elettrostatico. Possiamo misurare la tensione lungo una linea
da un punto A a un punto B con un metodo usato da Faraday [50, p.519]. Questo
funziona cosı̀: mettiamo in A e B due piccole sfere metalliche, come mostrato in
Fig.(??d), di raggi rA e rB . Se le colleghiamo con una spira di piccola sezione, le
cariche si muovono da una sfera all’altra mantenendo l’insieme delle due, sfera e filo,
allo stesso potenziale.
Supponiamo che la capacità del filo si possa trascurare in confronto con la capacità
delle due sferette cosı̀ che possiamo trascurare la carica sul filo. Ne viene che se le
sfere sono sufficientemente piccole da rendere trascurabile l’influenza delle cariche che
si sono raccolte sulle sfere sulle sorgenti del campo elettrico circostante. In queste
ipotesi denotiamo con qA la carica sulla sfera A e con qB quella raccolta sulla sfera in
B: sarà qA = −qB .
Se stacchiamo la connessione delle due sfere le cariche rimangono imprigionate.
Nel centro della sfera il potenziale della carica q collezionato sulla sua superficie è
q/(4π²r). Il fatto che il potenziale delle due sfere connesso con il filo siano uguali
implica che
qA
qB
VA +
= VB +
(2.48)
4π²rA
4π²rB
da cui otteniamo
UAB
−qA
≡ VB − VA =
4π²
µ
1
1
+
rA rB
¶
(2.49)
quindi possiamo misurare la tensione misurando la carica raccolta sulle due sfere.
In particolare se scegliamo B a terra la ”sfera” B diventa la Terra e quindi VB = 0
e 1/rB = 0: ne segue
−qA
VA =
.
(2.50)
4π²rA
La tensione si riferisce a linee dotate di orientazione interna.
2.4
Equazione costitutiva U −I
La conduzione elettrica in un mezzo conduttore è regolata dalla legge di Ohm:
2.4. EQUAZIONE COSTITUTIVA U −I
33
in regime stazionario la tensione elettrica fra due punti di un conduttore filiforme in assenza di forze d’altra natura (piezo-elettriche, termoelettriche, diffusive, chimiche, dinamiche) è proporzionale alla intensità
della corrente che passa nel conduttore.
U =RI
(2.51)
La legge di Ohm, sperimentata a corrente costante, è ritenuta valida anche in regime
variabile [61, p.387]. Vedremo però che il rapporto causa-effetto tra la tensione e la
conseguente corrente esige di principio un tempo di ritardo tra l’applicazione della
tensione e lo stabilirsi della corrente e quindi la scrittura U (t) = R I(t) nasconde
questo fatto. La cosa ha importanza sia dal punto di vista fisico che dal punto di
vista numerico.
Osservazione. Si considerino due recipienti connessi da un tubo molto lungo e molto
stretto. Il primo recipiente sia pieno di acqua ed il secondo sia vuoto. Si sollevi il recipiente
pieno rispetto a quello vuoto creando un dislivello H. L’acqua impiega un certo tempo a
raggiungere un regime stazionario e quindi la relazione tra il dislivello H (altezza idraulica)
e la portata Q, ovvero H = R Q, analogo alla legge di Ohm, è valido solo a regime.
A questo scopo occorre segnalare una proprietà caratteristica, che sfugge alla
trattazione differenziale la quale non distingue gli istanti primali da quelli duali, come
spiegheremo a pagina 101. Una tensione media, essendo il rapporto tra un impulso
di tensione elettrica e la durata dell’intervallo
U (t̃) =
E[T]
T
(2.52)
è naturalmente associata ad un istante duale t̃ come mostra la figura (6.1). La corrente, invece, essendo il rapporto tra il flusso di carica elettrica e la durata dell’intervallo
duale
Qf [T̃]
I(t) =
(2.53)
T̃
è naturalmente associato ad un istante primale t. Se ora facciamo una “inversione
temporale”, ovvero cambiamo l’orientazione interna degli intervalli primali, cambia
l’orientazione di T quindi, per la proprietà di disparità delle grandezze globali cambia
segno E[T] e quindi U (t̃). Questo cambiamento non comporta il cambiamento del
segno di Qf [T̃] e quindi quello di I(t). Quindi per una inversione temporale si ha
U (t) = −R I(t)
(2.54)
ovvero la legge di Ohm non è invariante per inversione temporale. Questo fatto
caratterizza la natura irreversibile della conduzione elettrica ovvero la produzione di
calore dovuta all’effetto Joule.
34
CAPITOLO 2. ELETTROSTATICA
Dal momento che gli istanti duali si trovano a cavallo di quelli primali, come
mostra la figura (6.1), una versione discreta della legge di Ohm è
U (t̃n ) = R
I(tn−1 ) + I(tn )
2
(2.55)
Questa è la relazione usata nella trattazione numerica. Si vede facilmente che il
passaggio al limite voluto dalla trattazione differenziale nasconde questa differenza in
quanto fa collassare istanti duali e istanti primali.
2.4.1
Riassunto
Nell’elettrostatica abbiamo introdotto due vettori
~ utilizzabile per misurare la forza agente su una carica di prova
1. il vettore E
~ utilizzabile per valutare la densità di carica indotta su una superficie
2. il vettore D
I due vettori svolgono quindi due ruoli distinti, anche nel vuoto. Gli esperimenti
indicano quale è la relazione tra i due vettori in diversi mezzi.
~ = ε0 E
~ nel vuoto semNon è accettabile dal punto di vista logico definire D
plicemente perchè una definizione non può contenere una costante materiale. Per
~ che D
~ e quindi occorre avere in precedenza
determinare ε0 occorre misurare sia E
~ ed E.
~
definito indipendentemente D
Il fatto poi che la costante ε0 , una volta misurata consenta di usare uno solo dei
~ come definizione.
~ non giustifica la scelta di D
~ = ε0 E
due vettori, solitamente E,
~ è un vettore di linea mentre il vettore D
~ è un vettore di superficie
Il vettore E
[39, p.154]
Capitolo 3
Magnetostatica
La presentazione dell’elettrostatica che abbiamo fatto, parte con l’introduzione del
~ In un secondo tempo si introduce
flusso elettrico Ψ e quindi del vettore induzione D.
~ ed in un terzo tempo si introduce la relazione costitutiva tra D
~ ed E.
~
il vettore E
In modo analogo, la presentazione che faremo della magnetostatica parte dall’in~
troduzione della tensione magnetica [o forza magnetomotrice] e quindi del vettore H.
~ In un terzo
Successivamente viene introdotto il flusso magnetico V ed il vettore B.
~ = B(
~ H).
~
tempo si introduce l’equazione costitutiva B
~ e
Questa presentazione contrasta con quella tradizionale che presenta prima E
~
~
~
poi D e prima B e poi H.
3.1
La corrente I: sorgente del campo magnetico.
Il campo magnetico è generato dalle cariche in moto, ovvero dalle correnti elettriche.
La corrente media I¯ è il flusso di carica Qf [S̃, T̃] diviso per la durata T̃ dell’osservazione
f
def Q [S̃, T̃]
¯
I(t) =
(3.1)
T̃
La carica che fluisce Qf si può anche chiamare impulso di corrente [51, p.12].
La corrente si misura con un galvanometro o un amperometro a secondo della
sua intensità. Riguardo al segno della corrente si sceglie ad arbitrio una orientazione
lungo il filo fissando un ordine dei morsetti dell’amperometro a zero centrale, e si
associa ad essa la corrente misurata. È ovvio che invertendo l’orientazione cambia il
segno della corrente misurata e quindi la corrente elettrica lungo un filo è associata
ad una linea con orientazione interna.
Se la corrente non viene incanalata in un filo ma si considera quella che attraversa
una data superficie, come nel caso delle correnti di Focault, si vede che la corrente
cambia segno al cambiare della orientazione esterna della superficie, definita dalla
35
36
CAPITOLO 3. MAGNETOSTATICA
normale alla superficie. Quindi la corrente è associata alle superfici con orientazione
esterna.
Si noti che ordinariamente parliamo di corrente lungo un filo conduttore per intendere quella che attraversa una sua sezione normale, come accade per la corrente
d’acqua lungo un fiume. Questo evita l’errore di ritenere che la corrente sia associata
ad una linea.
3.2
La prima legge della magnetostatica
La prima legge del magnetismo coinvolge le seguenti variabili fisiche
• la tensione magnetica Fm
~
• il vettore campo magnetico H
• il potenziale scalare magnetico Vm .
3.2.1
~
Il vettore campo magnetico H
Per iniziare la descrizione quantitativa del campo magnetico esaminiamo l’azione del
campo su un ago magnetico. Consideriamo una bobina sufficientemente lunga da
poter considerare entro di essa il campo magnetico uniforme.1 Disponiamo in essa un
ago magnetico posto trasversalmente all’asse della bobina e tenuto da un filo di una
bilancia di torsione, come mostra la Fig. (3.1).
In presenza della corrente nella bobina l’ago magnetico ruota tendendo a portarsi
parallelo all’asse della bobina. La completa rotazione è però impedita dalla torsione
del filo di sostegno. Per riportare l’ago nella posizione trasversale occorre torcere
all’indietro il filo applicando un momento torcente Mt . Si ricordi che il momento
torcente di un filo è proporzionale all’angolo di rotazione.
Si constata che l’entità del momento torcente è proporzionale alla corrente i1 che
passa nella bobina, al numero n1 di spire ed inversamente proporzionale alla lunghezza
L1 della bobina.
n 1 i1
.
(3.2)
Mt ∝
L1
Si constata che cambiando la bobina, ovvero prendendo una bobina con n2 spire,
anche composta da più strati di avvolgimento, con lunghezza L2 e facendo passare
una corrente i2 si ha lo stesso momento torcente (e quindi la stessa rotazione iniziale
dell’ago magnetico) quando si realizza la condizione
n 1 i1
n 2 i2
=
.
L1
L2
1
La descrizione che segue si trova in Pohl [52, p.86]
(3.3)
3.2. LA PRIMA LEGGE DELLA MAGNETOSTATICA
37
Mt
L2
n2
i2
Figura 3.1: Il magnetoscopio
Evidentemente l’uguaglianza della rotazione o del momento torcente indica l’uguaglianza dei campi nell’interno delle due bobine. Ne viene che la grandezza scalare
def
H =
ni
L
(3.4)
è adatta a caratterizzare l’intensità del campo magnetico. Si noti che l’osservazione
della uguaglianza dei momenti torcenti non presuppone una taratura del dispositivo
il quale funziona quindi da magnetoscopio.
I
I /2
2N
NI
N
I /2
I
Figura 3.2: Solenoidi di uguale ampiezza con lo stesso numero di amperspire (da
[46, p.238]).
38
CAPITOLO 3. MAGNETOSTATICA
Per dire da che parte gira l’ago dobbiamo fissare un verso all’asse del solenoide.
Questo è dato con la solita regola del cavatappi applicato al senso della corrente. Sia
~t il versore che indica la direzione orientata.
È allora opportuno “elevare” la grandezza scalare H alla “dignità” di vettore
~ = H ~t.
H
(3.5)
Questo vettore prende il nome di intensità del campo magnetico.
3.2.2
La tensione magnetica Fm
Rifacendoci al paragrafo precedente possiamo introdurre la tensione magnetica
lungo l’asse della bobina
def
Fm = n i.
(3.6)
Fm
.
L
(3.7)
Ne viene che
H=
In questo modo si può vedere H come il rapporto tra la tensione magnetica lungo
l’asse della bobina e la lunghezza della bobina. In generale entro un campo uniforme
~ si può definire come
la tensione magnetica lungo un segmento di retta L
def ~
~
Fm [L̃] = H
· L.
(3.8)
Se il campo magnetico non è uniforme questa definizione si generalizza cosı̀
def
Fm [L̃] =
Z
L̃
~ · d L.
~
H
(3.9)
~ ed H.
~ Nella regione interna ad un condensatore con
Osservazione. Parallelo tra D
armature piane sufficientemente estese il campo elettrico è sensibilmente uniforme e nell’interno di un solenoide rettilineo sufficientemente esteso il campo magnetico è sensibilmente
uniforme.
campo elettrico
campo magnetico
~ = Ψ ~n
D
S
flusso elettrico/area
~ = Fm ~t
H
L
tensione magnetica/lunghezza
(3.10)
L’analogo del condensatore a facce piane e parallele dell’elettrostatica è il solenoide
rettilineo della magnetostatica. Il condensatore a facce piane e parallele è stato il cavallo di
battaglia di Faraday cosı̀ come il solenoide è stato il cavallo di battaglia di Ampère.
3.2. LA PRIMA LEGGE DELLA MAGNETOSTATICA
3.2.3
39
~
La natura assiale di H
La tensione magnetica è quindi una grandezza fisica globale associata ad una linea.
Quello che non viene solitamente precisato è che tale linea deve essere dotata di
orientazione esterna, vale a dire di un senso di rotazione attorno alla linea. Infatti cambiando il senso della corrente la tensione magnetica muta nella sua opposta.
~ esso è associato ad un senso di rotazione attorno alla linea meQuanto al vettore H
~ è definito
diante la regola del cavatappi: è in questo momento che si vede che H
a meno di una convenzione sulla vite. Per questo motivo esso è chiamato vettore
assiale2 .
3.2.4
Misura della tensione magnetica
In un campo magnetostatico si consideri una sonda costituita da un solenoide di
sezione piccola comparata alla lunghezza e lo si alimenti con una corrente di verso ed
intensità tali da annullare il campo magnetico totale nel suo interno3 . Se n è il numero
totale di spire ed i0 la corrente necessaria, la corrente totale che avvolge l’asse del
solenoide è I0 = ni0 . Ciò significa che per ricreare il campo magnetico nell’interno del
solenoide, qualora le sorgenti esterne fossero rimosse, occorre far passare una corrente
opposta ieq = −i0 . La grandezza
Fm = n ieq
(3.11)
è la tensione magnetica relativa alla linea che forma l’asse del solenoide.
La tensione magnetica è associata al segmento di linea L̃ che forma l’asse del
solenoide ed il suo segno è legato ad un senso di rotazione attorno a tale segmento
scelto come positivo. Tale senso è, per definizione, l’orientazione esterna del segmento.
È evidente che
Fm [−L̃] = −Fm [L̃]
3.2.5
condizione di disparità di Fm .
(3.12)
La prima legge
Consideriamo un lungo filo rettilineo immerso in un mezzo omogeneo ed isotropo,
in particolare nel vuoto o nell’aria, ed esaminiamo il campo magnetico che si crea
intorno al filo quando in esso passa una corrente I.
2
Per la distinzione assiale/polare si veda l’appendice (A).
Questa è chiamata bobinetta compensatrice: vedi Fouillé [24, p.224]; Pohl [51, p.66]; Schelkunoff
[56, p.41]. Langevin [35, p.496] osserva che, in luogo di un solenoide, si potrebbe usare un cilindretto
metallico superconduttore avendo questo la proprietà di annullare il campo magnetico interno. In
un superconduttore immerso in un campo magnetico, infatti, si producono delle correnti superficiali
spontanee cosı̀ come in un conduttore si produce una carica superficiale spontanea. L’effetto di
queste correnti è quello di annullare il campo magnetico interno cosı̀ come l’effetto delle cariche
superficiali in un conduttore è quello di annullare il campo elettrico interno.
3
40
CAPITOLO 3. MAGNETOSTATICA
Misuriamo il valore H disponendo una bobinetta compensatrice lungo un piccolo
arco di circonferenza coassiale al filo. Facendo passare nelle n spire della bobinetta di
lunghezza a una corrente i in senso opposto, in modo da annullare il campo nel suo
interno, si può valutare H. Essendo H = n i/a (a parte il segno) si trova
H=
I
2πr
mezzo omogeneo ed isotropo
(3.13)
essendo r la distanza del filo. Evidentemente nessuna misura potrà mai confermare
il valore π. Il fatto è che, con le unità di misura del sistema SI, eseguendo la misura
si trova per denominatore, a secondo della precisione, il valore 6.28, 6.2831, ecc. Per
estrapolazione siamo portati a ritenere che il valore teorico sia 2 π. Questo valore
deve intendersi misurato nei limiti della precisione della misura. Questa è la legge di
Biot e Savart.
La relazione (3.13) vale anche nelle immediate vicinanze di un filo non rettilineo.
[16, p. 438]
Osservazione. Spesso si legge l’affermazione che per r = 0 si ha H = ∞. Si tratta di
una estrapolazione puramente matematica, fisicamente assurda. Infatti un filo per essere
percorso da corrente deve avere un benché minimo spessore. Si constata che la corrente
scorre nella sezione del filo con densità uniforme sicché sull’asse del filo il campo è nullo (altro
che infinito!). Questo ci insegna che occorre mantenere sempre il contatto con l’esperienza
per non fare affermazioni prive di riscontro fisico.
E’ chiaro che se il mezzo non è isotropo la legge non può valere: infatti la legge
presuppone la simmetria assiale e quindi l’isotropia.
Vediamo ora come dalla legge di Biot e Savart si possa indurre una legge che abbia
una validità più generale.
Liberiamoci dal rettilineo. Scomponendo il filo percorso da corrente in tanti
~ k ciascuno di questi pezzetti contribuirà alla creazione
pezzetti rettilinei di lunghezza L
~ Si tratta di indurre una possibile relazione tra l’elemento
di una parte del campo H.
~ k ed il contributo H
~ k che esso dà alla creazione del vettore H
~ in un
di corrente I L
punto generico.
Con riferimento alla figura (3.3) ed indicando con ~uk il versore diretto dal punto
medio M dell’elemento di corrente con il punto in cui si vuole calcolare il campo, la
formula di Laplace è
~k =
H
I ~
Lk ×~uk
4 π rk2
ovvero
~ =
dH
I
~ u
dL×~
4 π r2
(3.14)
che è nota come seconda legge di Laplace.
Come verifica di questa formula si può calcolare l’intensità del campo magnetico
nel centro di una spira circolare di raggio a percorsa da una corrente I, come illustrato
3.2. LA PRIMA LEGGE DELLA MAGNETOSTATICA
41
I
I
rk
~k
IL
~
H
a
~k
H
ρ
~
H
~uk
M
a)
b)
c)
~ in
Figura 3.3: a) La seconda formula di Laplace fornisce il contributo al campo H
un punto dato da un elemento di corrente. Come verifica della formula ipotizzata
si deve riottenere la formula di Biot-Savart in b) o quella del campo nel centro di
una spira come in c).
in figura (3.3c) e quindi verificare se il valore coincide con quello sperimentale. Il valore
ottenuto è
I
H=
(3.15)
2a
e l’esperienza lo conferma nei limiti della precisione della misura.
Osservazione. Il lettore sarà stupito dal fatto che la II legge di Laplace non sia qui
scritta con la notazione tradizionale usando quantità infinitesime e quindi il linguaggio
differenziale. Il fatto è, che una grandezza infinitesima non deve portare necessariamente il
simbolo “ d” davanti alla grandezza. Vi è poi una seconda ragione: la verifica della bontà
della formula si fa a posteriori determinando il campo dovuto ad un filo rettilineo indefinito
(che non si può avere!) e quindi effettuando una misura esatta (che non si avrà mai!). Ne
viene che noi ci dobbiamo accontentare di ottenere un accordo tra il valore teorico e la
misura sperimentale a meno di una tolleranza che tiene conto delle nostre esigenze, da una
parte, e della precisione dello strumento, dall’altra. Un risultato “esatto” appaga la nostra
sete di perfezione ma non avrà mai riscontro nella realtà. Noi siamo abituati a ritenere che
un risultato “esatto” sia l’ideale verso il quale deve tendere una teoria quando invece lo
scopo di qualunque teoria fisica è quello di essere in accordo con i fatti sperimentali: questo
implica che deve essere in grado di fornire il valore di una grandezza con una tolleranza
convenuta.
Tornando alla legge di Biot e Savart si constata che a causa della simmetria
circolare si può scrivere
2πrH = I.
(3.16)
~ lungo la circonferenza
Il prodotto a primo membro è la circolazione del vettore H
coassiale, chiamata forza magnetomotrice ed indicata con Fm . Ne viene che la
legge di Biot e Savart si può esprimere in una forma equivalente
Fm [lungo la circonferenza] = I [che attraversa il cerchio].
(3.17)
42
CAPITOLO 3. MAGNETOSTATICA
~ dal
Questa versione della legge non fa riferimento esplicito alla dipendenza di H
raggio e quindi può avere una validità più estesa, come ora vedremo.
Indipendenza dalla linea. Il fatto interessante della relazione (3.17) è che la forza magnetomotrice è la stessa per qualunque circonferenza coassiale. Inoltre, dal
~ è diretto tangenzialmente alla circonferenza ne viene che
momento che il vettore H
la tensione lungo un segmento radiale e quella lungo un segmento parallelo al filo
Fig. (3.5a) sono nulle. Inoltre le tensioni lungo qualsiasi arco di circonferenza coassiale delimitato da uno stesso settore, come gli archi BC e AD in Fig. (3.4b), sono uguali.
Ne viene che lungo il circuito ABCDA indicato in Fig. (3.4) la forza magnetomotrice
I
C
Um3 =0
r
i
H
B
D
Um4 = −Um2
a)
Um2
A
Um1 =0
b)
~ con la bobinetta compensatrice;
Figura 3.4: (sinistra) la misura del vettore H
(destra) la forza magnetomotrice lungo il percorso chiuso ABCDA è nulla.
è nulla.
La forza magnetomotrice lungo un generico segmento di linea, comunque inclinato,
come il segmento AB di Fig. (3.5b) è uguale a quello di qualunque spezzata che
congiunga i medesimi punti. Ne viene che la circolazione lungo una linea chiusa che
avvolga il filo (una sola volta) è uguale alla corrente I che attraversa il circuito. Se
la linea chiusa non avvolge il filo la forza magnetomotrice è nulla.
Quindi la forza magnetomotrice lungo un circuito che avvolge il filo è uguale alla
corrente I concatenata con il circuito qualunque sia la forma del circuito:
Fm [lungo un generico circuito] = I [che attraversa il circuito].
(3.18)
Questa formulazione presuppone ancora che la corrente passi in un solo filo rettilineo
indefinito.
Se ora consideriamo un circuito che avvolga due fili percorsi da corrente I1 ed I2
~ sarà
essendo applicabile il principio di sovrapposizione 4 , in ogni punto il vettore H
4
Per il principio di sovrapposizione si veda pagina 125.
3.2. LA PRIMA LEGGE DELLA MAGNETOSTATICA
I
I
43
I
D
C
B
B
F
A
E
A
a)
c)
b)
Figura 3.5: Ogni linea chiusa non riducibile può essere approssimata con una
linea composta di archi di circonferenze coassiali, di segmenti paralleli al filo e di
segmenti radiali. Il contributo non nullo alla forza magnetomotrice è dato solo
dagli archi di circonferenza.
~ 1 ed H
~ 2 e quindi
la somma di H
Fm [lungo il bordo di una superficie] = I [che attraversa la superficie]
(3.19)
In generale si trova:
Prima legge della magnetostatica: (legge di Ampère) la forza
magnetomotrice Fm lungo il bordo di una superficie dotata di orientazione
esterna è uguale alla corrente che attraversa la superficie.
che costituisce la prima legge della magnetostatica dovuta ad Ampère. In formule
♠
Fm [∂ S̃] = I[S̃].
3.2.6
(3.20)
Il potenziale scalare magnetico Vm
Consideriamo una regione di spazio nella quale non vi siano correnti. Per la legge di
Ampère in tale regione la tensione magnetica lungo ogni linea chiusa è nulla. Ne viene
che ad ogni punto P si può associare un potenziale magnetico Vm (P) definito come la
tensione magnetica da un punto prefissato A della regione al punto generico:
def
Vm (P) = Fm (AP) =
Z
P
A
~ · dL
~
H
(3.21)
avendo fatto la convenzione Vm (A) = 0. La nuova grandezza fisica è associata al punto e dipende dall’orientazione esterna di questo. Infatti, con riferimento alla figura
(3.6), si vedere che il segno del potenziale magnetico dovuto ad una spira dipende
dal senso in cui la corrente percorre una spira. Tale senso indica una orientazione
esterna della semiretta uscente dal punto e quindi una orientazione esterna del punto. Dal momento che la tensione magnetica Fm è il tasso dell’impulso di tensione
44
CAPITOLO 3. MAGNETOSTATICA
I → −I
P Vm
I
Um
Um → − Um
I → −I
Vm → − Vm
I
Figura 3.6: Il potenziale scalare magnetico in un punto dipende dall’orientazione
esterna del punto.
magnetica Fm [T̃, L̃] ne viene che anch’essa è il tasso dell’impulso di potenziale magnetico Vm [T̃, L̃] e quindi eredita una associazione all’intervallo pur essendo funzione
dell’istante (duale), come si vedrà a pagina 101.
3.3
La seconda legge della magnetostatica
La seconda legge della magnetostatica coinvolge le seguenti variabili fisiche
~
• il vettore induzione magnetica B;
• il flusso magnetico Φ.
3.3.1
~
Il vettore induzione magnetica B
~ è stato introdotto considerando la forza agente su una
Il vettore campo elettrico E
~ misurando la forza agente su un
carica di prova. In analogia si introduce il vettore B
“elemento” di corrente.
Consideriamo un campo magnetico uniforme come quello che si ha nell’intraferro
di un magnete ad anello illustrato in figura (3.7b).
Disponiamo un elemento di filo rettilineo P Q di lunghezza L percorso da corrente
nell’interno di tale campo uniforme (3.8). Tale elemento di filo si trovi all’estremità di
un braccio di una bilancia di torsione. Facendo passare una corrente di intensità i si
vede sperimentalmente che l’elemento di filo subisce una forza che tende a far ruotare il
braccio. La rotazione dell’asticciola è limitata da una forcella. Riportando l’elemento
di corrente nella posizione iniziale mediante l’applicazione di un momento torcente
Mt sul braccio, si misura l’intensità F della forza esercitata. L’esperimento indica
che tale forza dipende dalla direzione dell’elemento di filo rispetto alla direzione del
campo uniforme ed è massima quando l’elemento di filo è perpendicolare alla direzione
del campo. Facendo infatti ruotare il campo con il dispositivo indicato in figura si
verifica la seguente legge
F ∝ i L sin(α).
(3.22)
3.3. LA SECONDA LEGGE DELLA MAGNETOSTATICA
Mt
45
Mt
Q
F
P
-
F
+
a)
b)
~ dalla misura della forza
Figura 3.7: a) La nascita del vettore campo elettrico E
~
agente su una carica elettrica. b) La nascita del vettore induzione magnetica B
dalla misura della forza agente su un elemento lineare di corrente (si veda la figura
(3.8).
Questa proporzionalità si può tramutare in uguaglianza introducendo una variabile
atta a caratterizzare il campo. Indicatala con B scriveremo
F = B i L sin(α).
(3.23)
Vediamo ora come tener conto delle informazioni relative alle direzioni. Dal momento
che il segno della forza cambia invertendo il senso della corrente è spontaneo introdur~ cui daremo come direzione quella
re, in luogo della grandezza scalare L, un vettore L
dell’elemento rettilineo di filo ed come senso il senso della corrente. Dal momento che
la forza ed il campo sono vettori siamo portati a caratterizzare l’azione del campo
mediante un vettore che abbia come modulo B e come direzione quella del campo. Il
senso del vettore verrà fissato in modo che si possa scrivere
~ B.
~
F~ = i L×
(3.24)
~ per caratterizzare il campo
Abbiamo costruito in tal modo un secondo vettore B
magnetico: ad esso si dà il nome di vettore induzione magnetica. Il vettore
~ nasce con l’intento di descrivere la forza che un campo magnetico esercita su un
B
~ descrive l’intensità della sorgente.
elemento di corrente mentre il vettore H
46
CAPITOLO 3. MAGNETOSTATICA
i
~
S
Q
~
L
P
~
F
~s
~
B
Figura 3.8: Lavoro fatto spostando un elemento di corrente.
3.3.2
La nascita del flusso magnetico Φ
Supponiamo ora che l’elemento di filo subisca un piccolo spostamento ~s . Tale
spostamento comporta un lavoro W dato da5
~ B)
~ · ~s.
W = F~ · ~s = i (L×
(3.25)
Per le proprietà del prodotto misto potremo scrivere
~ B)
~ · ~s = (~s × L)
~ · B.
~
(L×
(3.26)
~ dell’elemento di superIl prodotto vettoriale a secondo membro dà il vettore area S
~
ficie generato dall’elemento L nello spostamento s. Indicato tale vettore area con S
potremo scrivere
~ · S.
~
W [S] = i B
(3.27)
Questo ci porta ad introdurre la grandezza
def ~ ~
Φ[S] = B
·S
(3.28)
alla quale si dà il nome di flusso magnetico. Potremo allora scrivere
W [S] = i Φ[S].
(3.29)
Questa definizione si generalizza ad un campo magnetico non uniforme nel modo
tradizionale: consideriamo una superficie S e dividiamola in tanti elementi piani dS.
Il flusso magnetico del campo attraverso la superficie è definito come
def
Z
Φ[S] =
S
5
~
~
B(P)
· d S.
Qui seguiamo la presentazione di Mie [44, p.148]
(3.30)
3.3. LA SECONDA LEGGE DELLA MAGNETOSTATICA
47
Consideriamo non un solo elemento di corrente ma un circuito, ad esempio una
spira, e facciamogli compiere un moto tale che alla fine il circuito si ritrovi nella
configurazione iniziale. Ogni punto del circuito descriverà allora una linea chiusa e
l’insieme di queste linee formerà una superficie chiusa. Cosı̀ se la spira è una circonferenza e la facciamo ruotare attorno ad un suo diametro generiamo una superficie
sferica; se la facciamo ruotare attorno ad una retta che non la intercetti generiamo
una superfice torica. In tutti i casi si genera una superficie chiusa. Una superficie
chiusa racchiude sempre un volume (ad esempio sfera o toro) e quindi può vedersi
come il bordo di un volume. Se il volume è dotato di orientazione interna anche la
superficie è dotata di orientazione interna anche e quindi si può scrivere ∂V. Il lavoro
compiuto durante questa generazione è
Z Z
W [∂V] = i
s
L
~
~ =i
B(P)
· ( d ~s × d L)
Z
∂V
~
~ = i Φ[∂V].
B(P)
· dS
(3.31)
Orbene l’esperienza dice che
Seconda legge della magnetostatica: se muoviamo un circuito,
sia rigido che deformabile, ad esempio una spira percorsa da corrente, in
un campo magnetico statico in modo da riportarlo alla posizione iniziale
non si compie alcun lavoro [44, p.148].
In formule
Φ[∂V] = 0.
♠
(3.32)
Si noti che questa relazione è analoga a quella del campo elettrostatico che afferma
essere nullo il lavoro fatto in un campo elettrico costante muovendo una carica q lungo
una linea chiusa 30.
Cosa accade se il campo magnetico è variabile? Quando si calcola un integrale
di linea o di superficie o di volume di una funzione o di un vettore che dipende oltre
che dal posto anche dal tempo si intende che l’integrazione viene fatta mantenendo
costante l’istante, come se il campo variabile fosse congelato a quell’istante. Questo
è semplicemente conseguenza della nozione di integrazione parziale. La stessa cosa
avviene nella definizione di derivazione parziale in cui le altre variabili rimangono
congelate. Ebbene la seconda legge del campo magnetostatico rimane valida, anche
se il campo magnetico è variabile ad esempio perché si sta spegnendo lentamente
o bruscamente: il flusso magnetico sul bordo di un volume è nullo ad ogni istante.
Vedremo che non accade lo stesso della tensione elettrica: in un campo costante nel
tempo (elettrostatica) essa è nulla su qualunque linea chiusa ma se il campo varia
essa (sempre essendo calcolata a tempo congelato) non è nulla, ovvero varia da un
istante all’altro.
Osservazione. Confronto tensione elettrica-flusso magnetico. Come la tensione elettrica U si può interpretare come il lavoro per unità di carica cosı̀ il flusso magnetico si può
48
CAPITOLO 3. MAGNETOSTATICA
interpretare come lavoro per unità di corrente:
U=
volt =
W
q
joule
coulomb
Φ=
W
.
i
weber =
(3.33)
joule
.
ampere
~
La natura assiale di B
3.3.3
Nel paragrafo precedente abbiamo rappresentato l’elemento di area individuato dai
~ mediante il vettore S
~ ottenuto facendo il prodotto vettoriale dei
due vettori ~s ed L
~ è associato alla superficie mediante la
due vettori. Questo implica che il vettore S
regola del cavatappi e quindi è un vettore assiale: esso muta segno se si cambia la
vite destra nella vite sinistra. Dal momento che il flusso magnetico Φ non dipende,
~ vi deve dipendere ovvero anche
ovviamente, dalla vite, ne viene che anche il vettore B
~
B è un vettore assiale. Questo si può vedere direttamente dalla formula (3.24) in
~
cui viene usato il prodotto vettoriale: dal momento che né la forza F né il vettore L
dipendono dalla regola della vite, e si chiamano perciò vettori polari, il vettore B
vi deve dipendere per compensare la dipendenza dalla vite del prodotto vettoriale.
L’equazione costitutiva B −H
3.4
~ ed H
~ dipende dal mezzo: essa può essere investigata con il
La relazione tra B
dispositivo di Fig.(3.9a).
N1
B
I
G
N2
+
0
C
+
4
3
2
A
1
Figura 3.9: a) Il dispositivo per la determinazione della relazione H − B nei
materiali ferromagnetici. b) La relazione risultante per i materiali ferromagnetici.
H
3.4. L’EQUAZIONE COSTITUTIVA B −H
49
Consideriamo un provino di forma torica6 . Se consideriamo un avvolgimento con
N1 spire in ciascuna delle quali passa una corrente I, indicando con L0 la circonferenza
media del toro se la sezione trasversale ha dimensioni piccole rispetto al raggio del
toro, il campo magnetico nel suo interno sarà approssimativamente uniforme per cui
H=
N1 I
.
L0
(3.34)
Agli estremi di un secondo avvolgimento formato da N2 spire, alla chiusura del circuito
si registrerà una variazione di flusso (inizialmente nullo)
N2 B S = R q
donde
B=
Rq
N2 S
(3.35)
essendo R la resistenza del circuito secondario; q la carica registrata nel secondario; S
l’area della sezione del toro. In questo modo, per ogni valore di I possiamo misurare
sia H che B e quindi possiamo ottenere il diagramma H − B.
6
Qui ci rifacciamo alla presentazione di Someda [58, p.24]
50
CAPITOLO 3. MAGNETOSTATICA
Capitolo 4
Elettromagnetismo
Per secoli i fenomeni elettrici sono stati considerati del tutto distinti da quelli
magnetici. Una cosa era l’elettrizzazione per strofinio, le palline di sanbuco,
la carica delle bottiglie di Leida, la generazione di corrente mediante una pila;
tutt’altra cosa erano i magneti permanenti e le bussole. Un giorno dell’anno
1819, durante un esperimento, il fisico danese Oersted si accorse che quando
in un filo passava una corrente un ago magnetico posto nelle vicinanze del filo
si spostava: un fatto elettrico, la conduzione, interagiva con un fatto magnetico. E’ cosı̀ caduto un muro divisorio tra due branche della scienza che erano
adiacenti e non lo sapevano! Nacque cosı̀ l’elettro-magnetismo.
4.1
Induzione elettromagnetica
Se mettiamo due sferette metalliche connesse da un sottile filo metallico entro un
campo elettrico, ad esempio fra le due armature di un condensatore, per induzione
elettrostatica esse si caricano come indica la figura (4.1a). Staccando il filo che li
unisce è possibile vedere che sulle due sferette si sono accumulate due cariche di
opposto segno. Questo indica che attraverso il filo metallico è stato percorso per un
tempo brevissimo da cariche elettriche. Esiste un altro modo, a priori insospettabile,
per caricare le due sferette. È sufficiente far muovere l’intero apparato, cioé le due
sferette ed il filo che le congiunge, in un campo magnetico perpendicolare alla velocità.
Infatti le cariche positive inizialmente in quiete lungo il filo muovendosi insieme al
filo sono soggette ad una forza che è diretta lungo il filo secondo la formula ... Ne
viene che cariche di segno opposto si accumulano sulle due sferette. Infatti staccando
il contatto col filo si constata che le sferette sono elettrizzate Si vede cosı̀ che durante
il moto del filo passa una corrente dall’una all’altra sferetta. Si determina allora
una differenza di potenziale che crea nell’interno un campo elettrico che si oppone
all’ulteriore moto delle cariche. Le cariche cessano di muoversi quando si realizza la
51
52
CAPITOLO 4. ELETTROMAGNETISMO
------
+
+
+
+
+
a)
+
+
+
+
+
+
+
+
+v
+
+
+
+
+
+
b)
Figura 4.1:
Due modi di caricare due sferette di cariche di opposto segno.a) tenendole ferme in un campo elettrostatico; b) muovendole in un campo
magnetostatico.
condizione che la forza dovuta al campo magnetico uguaglia quella dovuta al campo
elettrico che si è instaurato nel filo:
qvB = qE
e quindi
vB = E
(4.1)
Questo esperimento suggerisce di costruire il dispositivo di figura (4.2). Esso è composto di un filo metallico piegato ad “U” immerso in un campo magnetico uniforme
con il vettore B perpendicolare al piano che contiene il filo. Una sbarretta metallica
viene fatta scorrere strisciando con le due estremità sui due rami del filo ad “U”. In
conseguenza del moto della sbarretta le cariche positive migrano verso l’alto e giunte
ad una estremità della sbarretta possono proseguire il loro moto lungo il percorso ad
“U” ricongiungendosi con quelle di opposto segno. Nel circuito ABCD si determina cosı̀ una corrente indotta dal moto della sbarretta metallica, e quindi una forza
elettromotrice registrata dal voltmetro. A causa del movimento il flusso magnetico
concatenato con il circuito varia. L’esperimento dice che tra i due estremi C e D
delle guide si manifesta una forza elettromotrice di intensità E. La relazione tra le
grandezze in gioco è
∆Φ
E=−
(4.2)
∆t
Questa relazione esprime la legge dell’induzione di Faraday-Neumann.
4.1.1
L’impulso della forza elettromotrice E
Introducendo la grandezza
def
E =
Z
E dt
T
(4.3)
4.1. INDUZIONE ELETTROMAGNETICA
53
∆Φ
B
C
V
v
D
A
Figura 4.2:
La variazione del flusso magnetico nel circuito induce una forza
elettromotrice tra i due estremi delle guide.
coulomb
secondo
I
~˙
B
J~
weber
secondo
Φ˙
V = −Φ̇
Fm= I
newton
weber
~
E
~
H
newton
coulomb
i
Figura 4.3: Analogia tra il campo magnetico prodotto da una corrente ed il campo
elettrico prodotto da un flusso magnetico variabile (da Rojansky, [55, p.343])
E
H
H=
I r
2π a2
E=−
I 1
H=
2π r
r
Φ̇ r
2π a2
E=−
Φ̇ 1
2π r
r
Figura 4.4: Analogia tra il campo magnetico prodotto da una corrente ed il campo
elettrico prodotto da un flusso magnetico variabile. Si noti che il campo in entrambi
i casi si annulla sull’asse del cilindro/solenoide.
54
CAPITOLO 4. ELETTROMAGNETISMO
F
Ψ
I
Q
Faraday: Ψ = Q
Ampère: Fm= I
Figura 4.5: Analogia tra la legge di Faraday dell’induzione elettrostatica e quella
di Ampère delle correnti.
possiamo scrivere la legge dell’induzione cosı̀
E[∂ S̃, T̃] = Φ[S̃, Ĩ− ] − Φ[S̃, Ĩ+ ]
(4.4)
Anche per questa grandezza vale la relazione
E(−L) = −E(L)
4.1.2
condizione di disparità di E.
(4.5)
La misura del flusso magnetico
Il flusso magnetico è stato introdotto mediante la formula
Z
Φ[S] =
S
~ · ~n dS
B
(4.6)
~ Esso è anche uguale al lavoro
Esso può quindi essere calcolato a partire da B.
fatto muovendo un elemento di filo diviso per l’area generata. Dal momento però che
~
neanche il lavoro si misura (non esiste un “ergometro”) ma bensı̀ si calcola W = F~ · S
ne viene che Φ non si può misurare direttamente usando la sua definizione.
La legge di Faraday, una volta sperimentata, fornisce un modo semplice per misurare il flusso relativo ad una superficie. Si consideri una spira aperta i cui due estremi
siano connessi ad un voltmetro balistico, ovvero ad uno strumento in grado di misurare l’impulso di tensione elettrica. Spegnendo il campo o allontanando il magnete o
allontanando la spira in modo che il campo magnetico sia nullo nella regione in cui si
trova la spira si avrà Φ+ = 0 e quindi si ottiene un impulso di tensione U tale che
E = Φ−
(4.7)
4.1. INDUZIONE ELETTROMAGNETICA
55
Φ−
Vt
Φ+= 0
Vt
Figura 4.6: Aprendo un circuito (a sinistra) o allontanando un magnete (a destra)
il flusso attraverso la sonda (la spira al centro) si annulla e quindi si ha un impulso
di tensione. Per la legge di Faraday-Newman esso è uguale al flusso che contatena
la sonda in presenza del campo magnetico.
Ne viene dunque che il flusso preesistente Φ− è uguale all’impulso di tensione
misurato.
Ne viene il procedimento di misura della Φ: per misurare il flusso magnetico
concatenato ad un circuito si può misurare l’impulso di tensione generato tra i due
capi del circuito dall’annullamento del campo.
Il termine flusso magnetico attraverso una superficie è improprio. Esso sembra
indicare qualcosa che attraversa la superficie. Nulla di tutto ciò. Ad una spira percorsa da corrente utilizzata come rivelatrice di un campo magnetico si può associare un
flusso magnetico semplicemente misurando l’impulso di tensione che si genera ai capi
della spira. La parola “flusso” ricorda un fluire di qualcosa attraverso la superficie
come il flusso di acqua attraverso una sezione di un tubo. Ma nel caso del flusso
magnetico non c’è nulla che attraversa la superficie. Il termine “flusso” è già di per
sé equivoco: gli manca l’aggettivo “attraverso” per completare l’equivoco!
Il segno del flusso magnetico non dipende da una normale alla superficie (l’orientazione esterna della superficie) ma dal senso in cui la corrente percorre il bordo della
superficie.
Occorre fare attenzione che quando si introduce la normale ad un elemento di
superficie questa può essere indipendente dalla orientazione interna o dipendente dalla
orientazione interna per mezzo della regola della vite.
La normale indotta dalla orientazione interna della superficie dipende dalla regola
della vite e quindi è un vettore assiale. Dal momento che invece il flusso è una
56
CAPITOLO 4. ELETTROMAGNETISMO
grandezza che non ha certo bisogno della regola della vite esso deve essere scritto
come
Z
~ · ~n dS
Φ[S] =
B
(4.8)
S
~ deve essere un vettore assiale per compensare l’assialità di ~n.
in cui anche B
Invece il flusso elettrico utilizza la normale ~n come vettore predefinito, che è
~ è
assegnato indipendentemente dalla regola della vite è un vettore polare e quindi D
pure esso polare:
Z
~ · ~n dS
D
(4.9)
Ψ[S̃] =
S̃
Dunque quando nei libri di calcolo vettoriale si dice che il flusso di un vettore è dato
da un integrale del tipo (4.8) o (4.9) si tace sul fatto che vi sono due tipi di flussi,
quello della (4.8) e quello della (4.9). Il prototipo dei vettori assiali è il vettore
Figura 4.7: L’orientazione interna di una superficie può essere associata ad una
orientazione esterna mediante la vite destra o sinistra
velocità angolare ω
~ . Quando consideriamo una ruota che gira dobbiamo precisare
in che senso gira: occorre vedere come è diretta la velocità dei punti del disco. Per
istituire la velocità angolare come vettore occorre decidere da che parte orientarlo.
Questo si fa usando la vite destrogira e quindi il vettore ω
~ ha una velocità legata alla
vite: per questa ragione esso è un vettore assiale.
4.1.3
La legge di Maxwell-Ampère
Nella magnetostatica abbiamo presentato la legge di Ampère (3.20). Nel passaggio
ad un campo magnetico variabile la legge si modifica come segue:
Fm [∂ S̃, T̃] = Ψ[S̃, Ĩ+ ] − Ψ[S̃, Ĩ− ] + Qf [S̃, T̃]
È questa la legge di Ampère-Maxwell in forma finita.
♠
(4.10)
4.2. LE LEGGI DEL CAMPO IN FORMA FINITA
4.2
57
Le leggi del campo in forma finita
Possiamo riassumere le 4+1 leggi del campo elettromagnetico nel modo seguente
♠
Ψ [∂ Ṽ, Ĩ] = Q[Ṽ, Ĩ]
E[∂S, T] = Φ[S, I− ] − Φ[S, I− ]
Φ[∂V, I] = 0
Fm [∂ S̃, T̃] = Ψ [S̃, Ĩ+ ] − Ψ [S̃, Ĩ− ] + Qf [S̃, T̃]
Qf [∂ Ṽ, T̃] = Qc [Ṽ, Ĩ− ] − Qc [Ṽ, Ĩ+ ]
(4.11)
Questa scrittura è l’equivalente della forma integrale
Z
Z
~ · dS
~=
ρ dV
D
∂ Ṽ
Ṽ
·Z
¸T
Z Z
~
~
~
~
=0
E
·
d
L
dt
+
B
·
d
S
T ∂S
S
0
Z
~ · dS
~=0
B
∂V
·Z
¸T̃
Z
Z
Z Z
~
~
~
~ dt
H · dL dt −
D · dS =
J~ · dS
∂
S̃
T̃
S̃
T̃
S̃
0
·Z
¸T̃
Z Z
~
~
J · dS dt +
ρ dV = 0.
T̃
∂ Ṽ
Ṽ
(4.12)
0
Le equazioni (4.11) costituiscono la forma finita delle equazioni di Maxwell. La corrispondente formulazione differenziale in forma indipendente dal sistema di coordinate
è
~
div D = ρ
~
rot E
~
div B
~
rot H
div J~
= −
∂B
∂t
= 0
(4.13)
~
∂D
= +
+ J~
∂t
∂ρ
= − .
∂t
Per l’applicazione queste equazioni devono essere scritte in un sistema di coordinate, ad esempio in coordinate cartesiane.
Analogamente le equazioni in forma finita devono essere scritte in forma locale
usando un complesso di celle. Quando le equazioni (4.11) sono applicate alle celle dei
58
CAPITOLO 4. ELETTROMAGNETISMO
orientazione interna
orientazione esterna
volume Ṽ
linea L
bordo ∂L
superficie S
bordo ∂ Ṽ
superficie S̃
bordo ∂S
bordo ∂ S̃
volume V
linea L̃
bordo ∂ L̃
bordo ∂V
intervallo T
bordo ∂T
intervallo T̃
istante I
istante Ĩ
bordo ∂ T̃
Figura 4.8: Gli elementi spaziali e temporali dotati di estensione ed il loro bordo.
4.2. LE LEGGI DEL CAMPO IN FORMA FINITA
59
due complessi otteniamo la forma algebrica locale delle equazioni
X
n
o
cβα E[τ n+1 , lα ] + Φ[tn+1 , sβ ] − Φ[tn , sβ ]
α
X
X
β
n
= 0
dkβ Φ[tn , sβ ] = 0
o
c̃αβ Fm [τ̃ n , l̃β ] − Ψ [t̃n+1 , s̃α ] − Ψ [t̃n , s̃α ]
= Qf [τ̃ n , s̃α ]
β
X
d˜hα Ψ [t̃n , s̃α ] = Qc [t̃n , ṽh ]
α
n
o
X
˜hα Qf [τ̃ n , s̃α ] + Qc [t̃n+1 , ṽh ] − Qc [t̃n , ṽh ] = 0.
d
(4.14)
α
In particolare le due equazioni di evoluzione possono essere scritte (ricordando che
c̃αβ = cβα )
♠
Φn+1
= Φnβ −
β
n+1/2
Ψα
=
X
cβα Eαn+1/2
α
n−1/2
Ψα
+
X
cβα (Fm )nβ − (Qf )nα .
(4.15)
β
Questo sistema di equazioni è quello usato per le applicazioni numeriche, come vedremo nel capitolo (9), in particolare nello schema di pagina 141. Queste equazioni
mostrano chiaramente che i due flussi, quello elettrico e quello magnetico, sono da
valutare sugli istanti primali e duali rispettivamente. L’alternarsi degli istanti primali e duali assomiglia al salto della cavallina, come mostra la figura (4.9), e questo è
infatti il nome dato a questo algoritmo (leapfrog algoritm). Esso è usato nel metodo
delle Finite Differences in Time Domain, brevemente FDTD che è uno dei metodi di
maggior applicazione nell’elettromagnetismo computazionale.
t̃n
t̃n+1
t
tn−1
n-1
tn
n-1/2
n
n+1/2
Figura 4.9: Il salto della cavallina.
60
CAPITOLO 4. ELETTROMAGNETISMO
Tavola I: La corrispondenza tra la formulazione finita e quella
differenziale del campo elettromagnetico.
finite formulation
domain functions
field laws
1 Faraday’s law
X
n
differential formulation
field functions
(
o
~ + ∂t B
~ =0
curl E
~ −) = 0
~+ − E
n×(E
cβα E[τ n , lα ] + Φ[tn , sβ ] − Φ[tn−1 , sβ ] = 0
α
2 magnetic Gauss’ law
X
(
dkβ Φ[tn , sβ ] = 0
β
3 Maxwell-Ampère’s law
n
o
X
c̃αβ Fm [τ̃ n , l̃β ] − Ψ [t̃n+1 , s̃α ] − Ψ [t̃n , s̃α ]
(
β
= Qf [τ̃ n , s̃α ]
4 electric Gauss’ law (electrostatic induction)
X
~ =J
~ − ∂t D
curl H
~+−H
~ −) = K
n×(H
(
~ =ρ
div D
~ −) = σ
~+ −D
n · (D
d˜hα Ψ [t̃n , s̃α ] = Q [t̃n , ṽh ]
c
α
5 charge conservation law
X
n
(
o
d˜hα Q [τ̃ n , s̃α ] + Q [t̃n+1 , ṽh ] − Q [t̃n , ṽh ] = 0
f
c
c
α
6 general solution of magnetic Gauss’ law
Φ[tn , sβ ] =
X
(
cβα p[tn , lα ]
α
7 general solution of Faraday’s law
E[τ n , lα ]
n
o
X
=−
gαk V[τ n , pk ] − p[tn , lα ] − p[tn−1 , lα ]
k
(
~ =0
div B
~+ − B
~ −) = 0
n · (B
div J + ∂t ρ = 0
n · (J+ − J− ) = 0
~ = curl A
B
n×(A+ − A− ) = 0
~ = −grad V − ∂t A
E
V+−V− =0
material laws
s̃α
E[τ n , lα ]
τn lα
1 τ̃n L̃β
9 Fm [τ̃ n , l̃β ] =
Φ[tn , sβ ]
µ sβ
10 Ohm’s law
Ã
!
Qf [τ̃ n , s̃α ]
E[τ n , lα ] E[τ n+1 , lα ]
=σ
+
τ̃n s̃α
2 τn lα
2 τn+1 lα
8 Ψ [t̃n , s̃α ] = ²
~ = ²E
~
D
~
~ = 1B
H
µ
~
J = σE
4.2. LE LEGGI DEL CAMPO IN FORMA FINITA
61
Tavola II: Confronto tra le grandezze elettriche e magnetiche.
elettricità
magnetismo
Il flusso elettrico Ψ
è associato ad una superficie S̃
con orientazione esterna.
~
Il vettore induzione D
è il flusso per unità di area
ha la direzione del massimo flusso.
Metodo di misura:
sonda a due dischetti
(il campo interno si azzera)
Unità di misura:
coulomb
Legge di Gauss:
flusso elettrico = carica contenuta
Ψ [∂ Ṽ, Ĩ] = Q[Ṽ, Ĩ]
il flusso magnetico Φ
è associato ad una superficie S
con orientazione interna.
~
Il vettore induzione B
è il flusso per unità di area
ha la direzione della massimo flusso.
Metodo di misura:
azzera il campo.
Unità di misura:
weber = joule/ampere
Legge di Gauss:
Φ[∂V, I] = 0
L’impulso di f.e.m. E
è associato ad una linea L
con orientazione interna.
~
Il vettore campo elettrico E
è la f.e.m. per unità di lunghezza
ha la direzione della massima f.e.m.
Metodo di misura:
azzera il campo.
Unità di misura:
volt = joule/coulomb
Legge di Faraday:
E[∂L, T] = −∆Φ[S, I]
L’impulso di f.m.m. Fm
è associata ad una linea L̃
con orientazione esterna.
~
Il vettore campo magnetico H
è la f.m.m. per unità di lunghezza
ha la direzione della massima f.m.m.
Metodo di misura:
bobinetta compensatrice
(il campo interno viene azzerato).
Unità di misura:
ampere
Legge di Maxwell-Ampère:
f.m.m. = corrente concatenata
Fm [∂ S̃, T̃] = Qf [S̃, T̃] + ∆Ψ [S̃, Ĩ]
62
CAPITOLO 4. ELETTROMAGNETISMO
Capitolo 5
I complessi di celle
Nella trattazione differenziale hanno un ruolo essenziale i sistemi di coordinate
in quanto associano ai punti dello spazio una terna di numeri, le coordinate
del punto. Le variabili fisiche usate nella trattazione differenziale sono funzioni
del punto e quindi le coordinate permettono di mettere in relazione punti dello
spazio con numeri (i valori della variabili). Nella trattazione finita si usano
grandezze fisiche globali che sono associate non solo a punti, ma a linee, a
superfici e a volumi. Quindi i sistemi di coordinate non bastano più: occorre
avere un telaio di riferimento capace di esibire questi elementi spaziali. Questo
ruolo è svolto dai complessi di celle in quanto questi esibiscono i vertici, gli
spigoli, le facce ed i volumi.
5.1
Il ruolo dei complessi di celle
I complessi di celle svolgono un ruolo analogo ai sistemi di coordinate; essi consentono
di evidenziare nel dominio gli elementi spaziali di cui ha bisogno la trattazione finita
e cioè i volumi, le facce, gli spigoli e i vertici.
Nella formulazione differenziale le coordinate hanno un ruolo essenziale in quanto
permettono di descrivere i punti con delle coppie di numeri nel bidimensionale o
delle terne nel tridimensionale. I punti sono i protagonisti della geometria nella
formulazione differenziale in quanto questa fa uso delle funzioni di punto.
Al contrario in una formulazione finita si usano le funzoni di insieme e queste sono
riferite non solo ai punti ma anche alle linee, alle superfici ed ai volumi. Ne viene che
i complessi di celle, con i loro vertici, spigoli, facce e volumi offrono i referenti spaziali
per le grandezze globali e quindi sono indispensabili per la formulazione finita.
63
64
CAPITOLO 5. I COMPLESSI DI CELLE
5.2
Complessi simpliciali
Tutte le volte che si studia un campo si fissa una regione dello spazio, il dominio,
delimitato da un bordo. Per fare una trattazione finita del campo è necessario dividere
il dominio in tante cellette di forma arbitraria e di dimensioni opportune. Si ottiene
in tal modo un complesso di celle. I complessi più semplici da trattare sono formati
da triangoli nel bidimensionale e da tetraedri nel tridimensionale. Dal momento che
i triangoli e i tetraedri sono rispettivamente i poligoni ed i poliedri più semplici il
complesso da essi formato prende il nome di complesso simpliciale. I triangoli e i
tetraedri sono i simplessi nel bidimensionale e nel tridimensionale rispettivamente.
Figura 5.1: Un esempio di complesso di Delaunay con maglie più fitte in alcune
zone del dominio.
La figura (5.1) mostra un complesso simpliciale ottenuto con un generatore automatico di maglie1 .
Faremo riferimento a complessi simpliciali. Le ragioni che suggeriscono di usare
un complesso simpliciale in due o tre dimensioni sono almeno tre:
• la prima è che un dominio di forma generica anche contenente cavità può essere
delimitato da una o più poligonali come mostra la figura (5.1). La triangolazione
può appoggiarsi sui lati di queste poligonali nonchè sulle superfici di separazione
di materiali diversi, come indicato in figura (5.12). Questo non è possibile se la
maglia2 , è fatta di rettangoli3 .
1
E’ stato ottenuto con il programma easymesh che si trova all’indirizzo:
http://www-dinma.univ.trieste.it/ ˜nirftc/research/easymesh/
2
Noi usiamo il termine “complesso di celle” che è da ritenersi, per il momento, equivalente ad
altri termini come tessellatura, magliatura, grigliatura, rete, reticolo e similari.
3
La maglia rettangolare è stata la causa della tramonto del metodo delle differenze finite!
5.2. COMPLESSI SIMPLICIALI
65
• la seconda è che i simplessi consentono l’infittimento in alcune regioni e la
rarefazione in altre. Questo consente di infittire il complesso nelle regioni in
cui le variazioni delle grandezze sono più rapide e di rarefarle dove le variazioni
sono più lente. Ciò consente di diminuire notevolmente il numero delle celle del
complesso a parità di approssimazione del risultato. Questo non è possibile se
la maglia è costituita da rettangoli.
• L’interpolazione dei valori di una grandezza nell’interno di ogni simplesso è
particolarmente semplice, come vedremo.
5.2.1
Triangolazione di Delaunay
Il complesso simpliciale più semplice nel bidimensionale è quello costituito da triangoli equilateri. Esso però ha lo svantaggio di non poter essere adattato al bordo del
dominio oltre al fatto di non potersi infittire in alcune parti del dominio. I più vicini
ai complessi formati da triangoli equilateri sono i complessi di Delaunay4 . Prima
di presentarli dobbiamo fare alcune considerazioni riguardo due triangoli adiacenti.
Intanto ricordiamo che in un triangolo esistono quattro centri significativi: il bari3
3
O
B
3
3
I
C
1
2
baricentro: mediane
1
2
ortocentro: altezze
1
incentro: bisettrici
2
1
circocentro: assi
2
Figura 5.2: I quattro “centri” di un triangolo.
centro, l’incentro, il circocentro e l’ortocentro, come mostra la figura (5.2). Mentre il
baricentro e l’incentro sono sempre interni al triangolo, il circocentro e l’ortocentro
possono trovarsi all’esterno: questo capita quando i triangoli sono ottusangoli. Noi
prenderemo in considerazione il circocentro ed il baricentro.
5.2.2
Circocentro
Il pregio del circocentro, intersezione degli assi di un triangolo, sta nel fatto che il
segmento che congiunge i circocentri di due triangoli adiacenti è perpendicolare al
lato comune, come mostra la figura (5.3a) .
4
Chiamati anche complessi di Dirichlet.
66
CAPITOLO 5. I COMPLESSI DI CELLE
Dalla figura (5.3) si vede che il circocentro di un triangolo acutangolo si trova
all’interno del triangolo stesso. Se quindi si considerano due triangoli adiacenti T1 e
T2 , entrambi acutangoli, il segmento C1 C2 che connette i loro circocentri è diretto dal
triangolo T1 al triangolo T2 . Al contrario, se uno dei due triangoli adiacenti presenta
un angolo ottuso il segmento C1 C2 è diretto dal triangolo T2 al triangolo T1 .
Facciamo vedere che in questo caso una soluzione numerica darebbe risultati errati. Ad
esempio, in un campo termico, se indichiamo con T1 e T2 le temperature misurate nei punti
C1 e C2 e supponendo che T1 > T2 il calore fluisce dalla regione dalla regione più calda
verso quella più fredda attraverso la faccia comune del triangolo t1 al triangolo t2 . Ciò è
espresso dalla legge costitutiva di Fourier:
S
Q = (−λ) (T1 − T2 )
L
(5.1)
dova S denota l’area della faccia comune, L la lunghezza del segmento C1 C2 e λ la conducibilità termica. In questa relazione è sottinteso che la differenza di temperatura venga
misurata lungo una direzione ortogonale alla faccia. Se il verso del segmento C1 C2 è opposto al senso che va dal triangolo t1 al triangolo t2 , il risultato è che l’applicazione della
formula (5.1) genera un flusso opposto a quello naturale. Questo implica un errore nel
calcolo numerico che si può diffondere all’intera regione di integrazione anzichè rimanere
localizzato. Per evitare tale inversione dobbiamo richiedere che i due triangoli adiacenti
abbiano forma tale che non vi sia inversione dei centri. Occorre dunque assicurarsi che i
circocentri di due triangoli adiacenti non si scavalchino come invece accade in figura (5.3d).
Il criterio trovato da Delaunay è il seguente: per ogni triangolo il cerchio passante per
i tre vertici non deve contenere altri vertici del complesso delle celle. Per dimostrare
questo si faccia riferimento alla Fig.(5.4). Sia P QR un triangolo ottusangolo e C1
il suo circocentro. C1 giace sull’asse dei lati, in particolare sull’asse n del lato P R.
Si consideri una linea r con origine in P e comprendente il punto S come vertice
del triangolo adiacente P RS. Se S si trova all’interno del cerchio, ad esempio in S 0 ,
l’asse di P S 0 intersecherà l’asse n in C1 che giace prima del centro C1 . Al contrario,
se S giace in S 00 , l’asse di P S 00 si troverà C2 dopo C1 . Abbiamo dimostrato che se S
giace esternamente al cerchio del triangolo P QR (condizione di Delaunay) il centro
del triangolo adiacente P RS giace più lontano del centro del triangolo dato rispetto
al lato comune P R. Una triangolazione che soddisfi le condizioni di Delaunay in tutti
i suoi triangoli è detta triangolazione di Delaunay.
Il criterio di Delaunay è valido anche per i tetraedri: in tal caso la sfera contenente
i quattro vertici del tetraedro non deve contenere altri vertici.
Esistono diversi generatori di maglie che costruiscono automaticamente una triangolazione di Delaunay per un dominio di forma qualsiasi, anche contenente buchi.
Osserviamo che è opportuno considerare un dominio piano come un dominio tridimensionale racchiuso tra due piani paralleli situati a piccola distanza tra loro, come
se si trattasse di una lastra sottile. Questo porta a considerare in luogo di triangoli
5.2. COMPLESSI SIMPLICIALI
t
67
t
2
C2
C
t
t
2
C =C 2
C
1
C2
C1
1
2
C
t
t
t
1
a) ammesso
t
1
1
2
1
1
c) proibito
b) ammesso
2
d) proibito
Figura 5.3: I segmenti che congiungono i circocentri di due triangoli adiacenti
sono ortogonali al lato comune. I circocentri di due triangoli distinti è bene che
siano distinti come in a) e b).
r
S
S" r
r
S'
P
C1
n
P
n
a)
1
2
Q
R
C1
C1 = C 2
C2
Q
P
1
b)
2
Q
R
c)
1
C2 n
2
R
Figura 5.4: La condizione di Delaunay assicura che C1 e C2 non siano invertiti,
come in a, né coincidenti, come in b).
68
CAPITOLO 5. I COMPLESSI DI CELLE
dei prismi, come mostrato in Fig.(5.5). Questo ha almeno due vantaggi: il primo è
strato
strato
Figura 5.5: Un complesso simpliciale nel piano è opportuno che sia considerato
formato di prismi di spessore uniforme.
che si può mantenere una terminologia unificata tra problemi piani e tridimensionali
parlando di volumi (volumi dei prismi e volumi dei tetraedri); il secondo è che, come
vedremo, il complesso duale risulta sfalsato nella terza dimensione.
5.2.3
Triangolazione generica
Sovente il dominio bidimensionale ha un contorno composto di tratti orizzontali e
verticali, come mostrato in figura (5.6a). Questi domini si possono decomporre in
rettangolini come in figura (5.6b). Ciascuno di questi rettangolini può essere suddiviso
in due triangoli rettangoli aventi come ipotenusa una diagonale del rettangolo. Si
ottiene cosı̀ un complesso simpliciale, come si vede in figura (5.6c) che non è del tipo di
Delaunay in quanto la circonferenza che passa per tre vertici contiene un altro vertice.
Ne consegue che i circoncentri coincidono e si trovano a metà dell’ipotenusa. In questo
caso conviene prendere in considerazione i baricentri come punti rappresentativi dei
singoli triangoli.
5.3
Complesso duale
Dato un complesso di celle di forma a priori arbitraria si può considerare all’interno di
ogni cella un punto. Congiungendo tali punti interni per ogni coppia di celle adiacenti
si ottiene un secondo complesso di celle cui si dà il nome di complesso duale.
Se il complesso è formato da quadrati nel bidimensionale o da cubi nel tridimensionale, come indicato in figura (5.7), si può prendere il centro di ogni quadrato/cubo
come punto interno. Questo centro è nel contempo il baricentro ed il circocentro (nel
bidimensionale) o lo sferocentro (nel tridimensionale).
5.3. COMPLESSO DUALE
69
a)
b)
c)
d)
Figura 5.6: Un dominio formato da rettangoli, come in a), può essere decomposto
in tanti rettangoli come in b), ciascuno dei quali, a sua volta, può essere diviso in
due triangoli. Si ottiene cosı̀ un complesso simpliciale come in c), che non è del
tipo di Delaunay. Pertanto è conveniente usare come punti interni rappresentativi
i baricentri. Il complesso duale si ottiene congiungendo direttamente i baricentri
dei triangoli adiacenti, come in d).
duale
primale
a)
b)
Figura 5.7: a) La cella duale nel bidimensionale è sfalsata rispetto alle celle
primali. b) Idem nel tridimensionale.
70
CAPITOLO 5. I COMPLESSI DI CELLE
time
E,U
V
Ψ, Qf
Ψ, Qc
z
Fm , Um, Qf
Fm
Qc
Vm
Φ
Φ
x
x
Ψ, Qf
space
E,U
a)
Φ
Φ
y
E,U
V
Ψ, Qf
V
Fm , Qf
y
space
b)
E,U
Figura 5.8: (left) A space complex and the associated variables; (right) a threedimensional space-time and the associated variables.
Se il complesso è simpliciale del tipo di Delaunay si può prendere come punto
interno o il circocentro (rispettivamente lo sferocentro nel tridimensionale) oppure il
baricentro come in figura (5.9a e b). Nel primo caso i poligoni e i poliedri che ne
derivano sono chiamati poligoni di Voronoi; nel secondo caso i poligoni ed i poliedri
sono chiamati poligoni baricentrici.
Se si scelgono i baricentri è opportuno considerare come poligono/poliedro duale
quello che ha come vertici i baricentri non solo delle celle ma anche delle facce e dei
lati, come mostrato in figura (5.9b)
a)
b)
Figura 5.9: a) Il poligono duale ottenuto congiungendo i circocentri di due triangoli adiacenti (poligono di Voronoi).b) Il poligono ottenuto congiungendo i baricentri
dei triangoli con i baricentri dei lati.
Il lettore sarà d’accordo sul fatto che sia più semplice disegnare nel tridimensionale
un complesso formato da cubi piuttosto che da tetraedri. Questo lo spingerà, probabilmente, a preferire i cubi anche nel calcolo numerico. In tal modo ci si priverebbe
della possibilità di infittire le celle nelle regioni in cui le variazioni dei gradienti sono
maggiori e di quella di adattare il complesso alle superfici del bordo.
5.3. COMPLESSO DUALE
71
C
a)
b)
Figura 5.10: a) I baricentri del tetraedro, delle sue facce e dei suoi spigoli. b) Le
facce del poliedro duale si ottengono componendo le 6 faccette indicate in figura.
Ciascuna di queste è un quadrilatero congiungente il baricentro del tetraedro con
i baricentri delle facce e degli spigoli.
Per evitare questo il lettore deve tener presente che per la impostazione numerica
nel tridimensionale non è affatto necessario disegnare un complesso simpliciale e tanto
meno il suo duale. Al più occorre disegnare un solo tetraedro con le sei faccette
baricentriche. In figura (5.11) abbiamo illustrato le fasi per fare questa costruzione a
mano libera.
I baricentri delle cellette possono essere presi come vertici di un secondo complesso di celle: questo secondo complesso lo chiameremo duale del precedente che verrà
chiamato primale. La figura (5.22 a) mostra una cella duale nel caso di un complesso formato da rettangoli, mentre in (5.22b) si ha la stessa cosa per un complesso
simpliciale.
Perché il termine “duale”? Tutto nasce dalla constatazione sorprendente che
sussiste la seguente corrispondenza:
• ad ogni vertice del complesso primale corrisponde una cella del duale;
• ad ogni spigolo del complesso primale corrisponde una faccia del duale;
• ad ogni faccia del complesso primale corrisponde uno spigolo del duale;
• ad ogni cella del complesso primale corrisponde un punto del duale;
Una corrispondenza tra elementi di dimensioni complementari prende il nome di
corrispondenza di dualità.
Si possono allora classificare gli elementi spaziali orientati secondo gli schemi della
tabella (I).
72
CAPITOLO 5. I COMPLESSI DI CELLE
k
k
k
j
j
j
h
h
h
a)
b)
c)
i
i
i
k
k
k
j
j
h
j
h
d)
h
e)
i
j
~6
A
5
h
Ah / 3
k
g)
k
4
1
~1
A
i
~T e
h
Ah/4
~4
~3 A
A
3
j
~2
A
2
6
i
j
~T e
h
4
f)
i
k
h
h
i
h)
~5
A
i)
√
1/ 3
Figura 5.11: Le fasi della costruzione delle sei faccette del poliedro duale contenute
nel tetraedro.
i
5.3. COMPLESSO DUALE
73
A
B
C
campione formato da diversi materiali
complesso simpliciale
Figura 5.12: Un campione formato da tre materiali diversi: si possono generare
automaticamente dei complessi simpliciali con infittimento scelto a piacere.
5.3.1
Complessi di Delaunay-Voronoi
La coppia formata da un complesso simpliciale di Delaunay e dai relativi poligoni/poliedri di Voronoi prende il nome di complesso di Delaunay-Voronoi.
Per i metodi numerici è conveniente considerare i complessi di Delaunay-Voronoi5 .
La figura (5.13) indica un complesso di Delaunay-Voronoi nel piano. Si vede come i
poligoni di Voronoi siano in realtà dei prismi sfalsati rispetto ai prismi di Delaunay.
Parleremo indifferentemente di triangoli di Delaunay e di “prismi” di Delaunay, cosı̀
come parleremo indifferentemente di poligoni di Voronoi e di “prismi” di Voronoi.
Nel tridimensionale possiamo scegliere un complesso di celle formato dalle linee
coordinate e dalle superfici coordinate di un sistema di coordinate come quello formato
da coordinate polari. Complessi di celle formati dalle linee e dalle superfici coordinate
sono utili quando si vuole passare al limite per ottenere la formulazione differenziale.
Abbiamo già detto che la nozione di complesso di celle in un contesto finito corrisponde alla nozione di sistema di coordinate in un contesto differenziale. Possiamo
aggiungere che la coppia di celle Delaunay-Voronoi corrisponde ad un sistema di coordinate ortogonali. Inoltre un complesso di celle formato da parallelotopi 6 corrisponde
ad un sistema di coordinate cartesiane. Indicheremo le celle del complesso duale con
una tilde in alto.
Il complesso di celle ed il suo duale sono stati presentati nel bidimensionale e nel
tridimensionale. Esso però si possono introdurre nell’unidimensionale, come riportato
nella figura (5.14).
Dopo aver diviso l’intervallo AB in intervalli più piccoli (le celle unidimensionali),
5
Cavendish, Hall, Porsching [15, p.338]
Il termine parallelotopo comprende quello di parallelogramma nel bidimensionale e di
parallelepipedo nel tridimensionale e lo estende a dimensioni superiori a tre.
6
74
CAPITOLO 5. I COMPLESSI DI CELLE
Figura 5.13: Per studiare campo piano di spostamenti si può usare una triangolazione. Ogni triangolo deve però interpretarsi come la base di un prisma in quanto
occorre tener conto del fatto che esiste uno spessore. Il complesso duale, formato qui da esagoni regolari è a sua volta da interpretare come formato da prismi
esagonali. I prismi esagonali e quelli triangolari sono sfalsati anche nello spessore.
intervallo duale
vertice del duale
vertice del primale
B
P
L
x
P̃
P̃
P
L
L̃
P̃
A
L̃
L̃
L̃
L
intervallo primale
Figura 5.14: Un complesso di celle ed il suo duale in una dimensione.
5.3. COMPLESSO DUALE
75
si possono considerare dei punti interni ai singoli intervalli come vertici del complesso
duale. La scelta più spontanea per i vertici del duale è quella dei punti medi degli
intervalli. Si noti che gli intervalli duali relativi ai due sistemi A e B risultano spezzati.
Per denotare gli elementi spaziali di un complesso di celle e del suo duale introdurremo la notazione seguente.
P
L
S
V
=
=
=
=
punto
linea
superficie
volume
= vertice
= spigolo
= faccia
= cella
Per denotare gli elementi spaziali del complesso duale porremo una tilde sopra la
lettera corrispondente: P̃, L̃, S̃, Ṽ.
E’ immediato constatare che gli elementi spaziali del complesso duale corrispondono a quelli del complesso primale in ordine inverso, come mostra la figura (5.15)
.
1D
2D
1P
1P
1S̃
1L̃
2L
1L
3D
1P
1Ṽ
3L
3S̃
3S
3L̃
1V
1P̃
2L̃
1P̃
1S
1P̃
Figura 5.15: Gli elementi spaziali esibiti da un complesso di celle e dal suo duale.
La figura (5.15) mostra delle celle formate mediante un sistema di coordinate
curvilinee. Questo tipo di celle è comodo quando si voglia passare da una formulazione
finita ad una differenziale. I numeri che stanno davanti ai simboli 1P, 3L, 3S, 1V
indicano le famiglie di elementi. Ad esempio 3L indica che vi sono tre famiglie di
”linee” (spigoli delle celle) e cioè tante quante sono le linee coordinate.
Quando si considera un complesso simpliciale, che è più adatto alla risoluzione
numerica dei problemi di campo, questi numeri scompaiono.
Se nel problema esaminato interviene il tempo, possiamo costruire un complesso
di celle ed il suo duale sull’asse dei tempi, come indicato in figura (5.16).
76
CAPITOLO 5. I COMPLESSI DI CELLE
τ̃
τ̃ n
t̃2
t̃1
t
t̃n
t
tn−1
τ
t̃n+1
t
tn
+1
tn
τn
Figura 5.16: I due complessi di celle, primale e duale, sull’asse dei tempi.
Chiameremo elementi temporali gli istanti I e gli intervalli T del complesso primale
con i relativi duali Ĩ e T̃.
Si può considerare anche uno spazio-tempo bidimensionale come indicato in figura
(5.17).
IP
tempo t
TL
T
I
I
I˜L̃
IP
I˜
T̃
I˜
IL
T̃L̃
P
P̃
L
P
TP
P̃
TL
P̃
T̃ P̃
I˜P̃
x
P
T̃ P̃
IL
T̃L̃
I˜L̃
TP
I˜P̃
L̃
Figura 5.17:
Combinando gli otto elementi spaziali P, L, S, V, P̃, L̃, S̃, Ṽ con i quattro elementi
temporali I, T, Ĩ, T̃ si ottengono 8×4 = 32 elementi spazio-temporali. La tavola (I)
mostra uno schema degli elementi spaziali e temporali.
5.4
Orientazione degli elementi spaziali
Una caratteristica degli elementi spaziali è quella di poter essere orientati. Comunemente in fisica si fa uso della nozione di orientazione senza fornire un’adeguata
presentazione. La prima cosa che deve essere detta è che vi sono due tipi di orientazione di un elemento spaziale, quella interna e quella esterna. Ciascuna orientazione
è dotata di versi.
Un’altra cosa comunemente non specificata è che anche i punti, pur essendo privi
di misura, possono (e debbono!) essere orientati nell’uno o nell’altro modo.
5.4. ORIENTAZIONE DEGLI ELEMENTI SPAZIALI
77
Tavola I: Classificazione degli elementi spaziali degli spazi a diverse
dimensioni: (sopra) spazi a dimensioni in 1, 2, 3; (sotto) gli stessi con
aggiunta della dimensione temporale.
figura
complesso
primale
P L complesso
duale
complesso
primale
P L̃ L P̃ complesso
duale
complesso
primale
S̃ P L̃ L complesso
duale
Ṽ S̃ a) variabile x
S P̃ S L̃ b) variabili x, y
V P̃ c) variabili x, y, z
IP IP T̃ T̃S̃ T̃Ṽ I T TP TP ĨS̃ ĨṼ Ĩ d) variabile t
IL IL T̃L̃ T̃S̃ TL TL ĨL̃ ĨS̃ IP IS IS T̃L̃ T̃P̃ T̃L̃ TP TS TS ĨL̃ ĨP̃ ĨL̃ IL T̃P̃ TL ĨP̃ e) variabili t, x
f) variabili t, x, y
IV T̃P̃ TV ĨP̃ g) variabili t, x, y, z
78
CAPITOLO 5. I COMPLESSI DI CELLE
3
3
2
2
1
1
2-cell
2-simplex
1
2
2
3-simplex
3-cell
5
3
1
1
1-simplex
5
4
4
4
4
3
3
1
2
2
4-simplex
4-cell
Figura 5.18: (above) The p -cells of a simplicial complex and (below) those of a cell
complex. In both lines the last two pictures shows the three-dimensional projection
of a four-dimensional simplex and of a four-dimensional cube respectively.
Vedremo che se dotiamo di orientazione interna gli elementi spaziali del complesso
primale automaticamente gli elementi spaziali del complesso duale risultano dotati di
orientazione esterna.
5.4.1
Orientazione interna
Una linea può essere percorsa in un senso o nel senso opposto: fissare un senso di
percorso vuol dire dare una orientazione interna alla linea. La nozione di orientazione
è indispensabile in fisica perché le grandezze fisiche che associamo alle linee cambiano
segno al cambiare dell’orientazione. Allo stesso modo il lavoro di una forza dipende
dalla orientazione della linea; la tensione elettrica tra due punti cambia segno al
cambiare dell’orientazione della linea (cioé invertendo i terminali del voltmetro).
Una volta orientata la linea si può dare una orientazione interna ad una superficie: basta dare una orientazione interna, ovvero un senso di percorso, al suo bordo.
L’orientazione interna di una superficie si può indicare con una freccia curva. Ad
esempio, il flusso magnetico prodotto da una spira percorsa da corrente cambia segno al cambiare del senso della corrente: è questa una grandezza fisica il cui segno è
vincolato all’orientazione interna della superficie.
Se si prende un cubo e si assegna una orientazione interna ad una sua faccia
quindi si propaga questa orientazione alle altre facce in modo che le orientazioni siano
compatibili, si dice che si è data una orientazione interna al cubo. Evidentemente
5.4. ORIENTAZIONE DEGLI ELEMENTI SPAZIALI
orientazione interna
orientazione esterna
P
Orientazione interna di un punto:
un punto è orientato positivamente
se è un pozzo.
Orientazione esterna di un volume:
scelta di un orientazione interna od
esterna delle normali.
L
Orientazione interna di una linea:
è la nozione base usata per dare
un significato alla orientazione di
tutti gli altri elementi geometrici.
Orientazione esterna di un volume:
scelta di un orientazione interna o
esterna delle normali.
Orientazione interna di una superficie:
è un orientazione compatibile dei
suoi spigoli, per es. il verso per
percorrere i suoi bordi.
Orientazione esterna di una linea:
è l’orientazione interna della
superficie che attraversa la linea.
Orientazione interna di un volume:
è un orientazione compatibile delle
sue facce. E’ equivalente alla regola
della vite.
Orientazione esterna di un punto:
è l’orientazione interna del
volume che contiene il punto.
S
V
79
Ṽ
S̃
L̃
P̃
Figura 5.19: I due tipi di orientazione di un elemento spaziale.
Figura 5.20: L’orientazione interna di un volume equivale alla regola della vite.
80
CAPITOLO 5. I COMPLESSI DI CELLE
invece del cubo si può orientare un generico poliedro o una sfera o un cilindro. Nel
caso di un cilindro si vede che le frecce curve sulle due basi hanno sensi opposti e
invitano a torcere il cilindro: cosı̀ facendo le generatrici del cilindro si attorcigliano
dando luogo ad un’elica o ad una vite. Se si cambia l’orientazione interna del cilindro
le generatrici si attorcigliano nel senso opposto e si genera l’elica opposta. Di qui si
vede che una vite destra (come le comuni viti da ferro e da legno) o sinistra equivale
all’orientazione interna di un volume.
Se si considera un tetraedro con tre spigoli ortogonali il cambiamento dell’orientazione interna equivale al cambiamento della mano destra con la mano sinistra.
Ha senso orientare i punti? Si. Basta osservare che da una “sorgente” l’acqua
esce, mentre in un pozzo l’acqua entra. La nozione di sorgente e di pozzo è usata
nel campo elettrico: le cariche positive sono sorgenti e quelle negative sono pozzi. Le
linee di campo escono da una carica positiva ed entrano in quella negativa.
Diremo pertanto che un punto è dotato di orientazione interna se consideriamo
le linee uscenti o quelle entranti come positive. A prima vista sembra privo di senso
geometrico parlare di orientazione di un punto in quanto questo non ha misura. Basta
però pensare che quando una nozione non ha significato immediato le si può dare un
significato in modo da mantenere certe proprietà formali. Consideriamo le potenze
ad esponente intero del tipo 3m . Secondo la definizione diretta 34 = 3×3×3×3, ovvero
si deve moltiplicare la base per se stessa tante volte quante ne indica l’esponente.
Stante questa definizione l’espressione 30 è priva di significato: infatti essa indica il
prodotto di 3 × 3 × 3... zero volte! Si scopre poi la regola preziosa 3m /3n = 3m−n .
Questa regola, originariamente, vale se m > n. Cosa succede per m = n ? La regola
estesa a questo caso fornisce l’uguaglianza: 3m /3m = 1 . Dunque all’espressione 30
che non ha significato diretto si può dare significato assegnando, per convenzione, il
valore 1. In tal modo si conserva la proprietà formale.
La stessa cosa si può fare per dare una orientazione interna ad un punto. Dal
momento che il punto non ha misura tale nozione non può essere data direttamente.
Ma considerando che dal punto possono partire ed arrivare linee si può definire l’orientazione interna considerando come positive le linee uscenti e come negative quelle
entranti. Questo induce una orientazione interna al punto che diventa sorgente o
pozzo.
Facciamo ora vedere che, per ragioni storiche, il punto è stato implicitamente
orientato come pozzo anzichè come sorgente.
Consideriamo il grafico di una funzione y = f (x) e consideriamo la definizione di
“incremento” della funzione tra il valore in x e quello in x + h, come indicato in figura
(5.21a).
Chiamiamo numero di incidenza tra un punto orientato ed una linea orientata
il numero +1 se le due orientazioni sono concordi, -1 se sono discordi e 0 se i due
non sono incidenti. Se si orientano i punti come pozzi (linee positive entranti) si
vede che i numeri di incidenza di due estremi dell’intervallo h sono rispettivamente
5.4. ORIENTAZIONE DEGLI ELEMENTI SPAZIALI
y
81
y0
y
f (x + h)
f (x)
x0
O0
x
h
~r 0
P
~r 00
~r
x
−1
a)
y 00
x00
O 00
O
+1
b)
def
∆y = (−1) f (x)+(+1) f (x+h)
Figura 5.21: a) La tradizionale definizione dell’incremento di una funzione implica l’orientazione dei punti come pozzi. b) Il vettore raggio è sempre orientato
dall’origine verso il punto e quindi il punto è orientato come un pozzo.
-1 e +1. Questi numeri coincidono con i coefficienti dei valori f (x) ed f (x + h) nella
definizione dell’incremento. Quindi: la definizione di incremento di una funzione
utilizza implicitamente la nozione di punto orientato come pozzo. Una seconda ragione
che indica una orientazione implicita dei punti come pozzi (linee positive se entranti)
si ha nella considerazione del vettore raggio. In figura (5.21b) si vede che il vettore ~r
è, per definizione, orientato dall’origine di un sistema di assi al punto considerato.
Le figure (5.22) e (5.23) mostrano rispettivamente un complesso di celle nel bidimensionale e nel tridimensionale con le orientazioni interne dei rispettivi elementi
spaziali.
5.4.2
Orientazione esterna
Un tessuto o una medaglia hanno un diritto e un rovescio. Orientare una superficie
vuol dire anche fissare una sua faccia come positiva ed una come negativa ovvero
fissare un senso di attraversamento chiamando negativa la faccia di ingresso e positiva
quella di uscita. Questo tipo di orientazione si dice “esterna” in quanto presuppone
l’immersione della superficie nello spazio. L’orientazione interna di una superficie si
poteva fissare stando nell’interno della superficie e percorrendola, non attraversandola.
Quindi diremo che una superfice è dotata di orientazione esterna quando è stato fissato
un senso di attraversamento o, che è equivalente, quando è stata prescelta una sua
faccia come positiva. Faremo riferimento alla figura (5.19) parte destra.
Se consideriamo il calore che attraversa una superficie il suo segno dipende dalla
82
CAPITOLO 5. I COMPLESSI DI CELLE
primale
duale (Voronoi)
primale (Delaunay)
duale
P
S̃ xy
Lx
L̃ y
Ly
L̃ x
P
S̃
L
Sxy
L̃
P̃
S
P̃
Figura 5.22: Un complesso di celle primale e duale in due dimensioni. A sinistra
delle celle rettangolari, a destra delle celle triangolari.
z
Lx
P
x
S xy
complesso
primale
Ly
y
Lx
P
Lz
pozzo
S xy
complesso
duale
1P
1V
3L
3S
3S
3L
1V
1P
Lz
Ly
V
Syz
V
S yz
S zx
P
S zx
normali
uscenti
Figura 5.23: Un complesso di celle cubiche: il cubo ombreggiato è il duale. La
tabella a destra classifica gli elementi dei due complessi in uno schema che sarà
utilizzato intensivamente più tardi.
5.4. ORIENTAZIONE DEGLI ELEMENTI SPAZIALI
83
orientazione esterna prefissata: sarà positivo se il flusso di energia (calore) va nel
senso dell’orientazione esterna.
Se consideriamo la carica elettrica indotta su un dischetto di rame posto in un
campo elettrico dobbiamo prima dire quale faccia consideriamo positiva. Infatti la
carica indotta su una faccia è opposta a quella indotta sulla faccia opposta. Se su
una faccia c’è la carica di 7 coulomb e sull’altra -7 coulomb, quale delle due potremo
designare col nome di carica indotta? Sarà quella indotta sulla faccia che consideriamo
positiva.
Anche una linea può avere una orientazione esterna: basta considerare un segmento di linea immerso nello spazio e un senso di rotazione attorno al segmento. Il modo
migliore di vederlo è quello di disporre il segmento attraverso un elemento di superficie dotato di orientazione interna. La freccia curva che dà l’orientazione interna della
superficie fissa una orientazione esterna del segmento. E’ come se il segmento fosse
l’asse di rotazione di un disco: ruotando nell’uno o nell’altro senso il disco si definisce
una orientazione esterna dell’asse.
Anche un volume può essere dotato di una orientazione esterna: basta considerare
positive le linee uscenti e negative quelle entranti. Solitamente si dice che un volume
è “orientato” quando si fissano le normali uscenti o entranti dal suo bordo.
a)
b)
Figura 5.24: a) orientazione interna di un cubo; b) orientazione esterna.
Questa dualità tra linee e superfici, tra punti e volumi ci consente di dare senso
alla nozione di orientazione esterna di un punto. Basta considerare un cubo dotato
di orientazione interna e un punto posto al centro di esso: i sensi di rotazione sulle
facce del volume possono vedersi come sensi di rotazione delle semirette con origine
nel punto. Quindi un punto si dirà dotato di orientazione esterna quando siano stati
fissati dei sensi di rotazione delle semirette con origine nel punto. Per rendere evidente
questa orientazione si consideri il centro della pupilla dell’occhio: se si guardano le
lancette di un orologio alla semiretta con origine nel centro della pupilla è associata
l’orientazione oraria del moto delle lancette.
Si può vedere che il potenziale magnetico in un punto di un campo magnetico è
una grandezza fisica associata ai punti dotati di orientazione esterna: esso cambia
segno se si cambia l’orientazione esterna del punto.
Mentre l’orientazione interna di un elemento spaziale (linea, superficie, volume)
84
CAPITOLO 5. I COMPLESSI DI CELLE
non richiede di considerare l’elemento stesso immerso in una varietà mono-, bi- o tridimensionale, al contrario l’orientazione esterna esige questa immersione e dipende
dalla dimensione della varietà entro la quale l’elemento è considerato immerso.
Consideriamo segmento di retta nello spazio, la sua orientazione esterna consiste
in un senso di rotazione attorno al segmento. E’ come se il segmento fosse l’asse di
rotazione di un disco: ruotando nell’uno o nell’altro senso il disco si definisce una
orientazione esterna dell’asse. Se consideriamo il segmento di retta in un piano la
sua orientazione esterna consiste in un senso di attraversamento. Se consideriamo un
segmento di retta appartenente ad una retta la sua orientazione esterna consiste nel
concepire il segmento come fosse soggetto a trazione o compressione.
L
L
L
L
L
L
a)
b)
c)
Figura 5.25: Orientazione esterna di un segmento di retta: a) nello spazio; b) nel
piano; c) in una retta.
Consideriamo un poligono, ad esempio un triangolo o un rettangolo. Se il poligono
è immerso nello spazio la sua orientazione esterna è costituita da un senso di attraversamento ovvero dal considerare una faccia come negativa e l’altra come positiva.
Se invece il poligono è considerato in un piano, la sua orientazione esterna consiste
nel considerare le semirette uscenti come positive e quelle entranti come negative o
viceversa.
Figura 5.26: Orientazione esterna di un elemento di superfice: a) nello spazio; b)
nel piano.
5.4. ORIENTAZIONE DEGLI ELEMENTI SPAZIALI
a)
85
b )
c )
Figura 5.27: Orientazione esterna di un punto: a) nello spazio, b) nel piano, c)
su una retta.
Il momento statico di un sistema di masse valutato rispetto ad un piano è un esempio di grandezza fisica associata ad un piano con orientazione esterna: infatti il segno
del momento statico di una massa dipende dal senso prescelto di attraversamento del
piano.
La figura (5.28) riassume la nozione di orientazione esterna di quattro elementi spaziali immersi nel tridimensionale, nel bidimensionale e nell’unidimensionale
rispettivamente.
L̃
S̃
3D
Ṽ
P̃
L̃
P̃
2D
S̃
1D
L̃
P̃
Figura 5.28:
L’orientazione esterna di un elemento spaziale dipende dalle
dimensioni dello spazio di immersione.
L’orientazione di un elemento spaziale si mantiene per proiezione, come mostra la
86
CAPITOLO 5. I COMPLESSI DI CELLE
figura (5.29).
orientazione interna
orientazione esterna
IR3
IR2
IR1
Figura 5.29: Quando un elemento spaziale o spazio-temporale è proiettato in uno
spazio di dimensione inferiore le orientazioni interna od esterna dell’oggetto di
partenza danno luogo alle corrispondenti orientazioni della proiezione.
La figura (5.30) mostra dei complessi di celle in spazi di diversa dimensione, assieme alle orientazioni degli elementi spaziali che li compongono. Si osservi il fatto
importante che una volta assegnate le orientazioni interne agli elementi del complesso
primale risultano assegnate quelle esterne del duale.
La tavola (I) mostra degli schemi di classificazione degli elementi spaziali di un
complesso di celle e del suo duale.
5.4. ORIENTAZIONE DEGLI ELEMENTI SPAZIALI
87
y
P̃
P̃
x
P
P
L
L
L
S̃
P̃
a
x
b
z
L
P
S̃
P
I˜
Ṽ
T
L̃
y
S̃
V
L̃
S
c
TL
I˜
L
Figura 5.30:
P
P̃
y
T̃S̃
x
I˜L̃
TS
spazio
TL
P
P
e
TP
P̃
T̃ P̃
TP
x
T̃L̃
P̃
IS
I˜P̃
I˜P̃
T̃
IL
IL
T̃L̃
I˜L̃
I˜
I
IP
d
T̃ P̃
IP
tempo t
T
tempo t
I˜S̃
S
I˜
tempo
I
I
x
T
I˜
I
S
T̃
T̃
L
P̃
I
L̃
P̃
P
P
S
L̃
L̃
T̃L̃
f
L̃
Complessi di celle. (a) unidimensionale; (b) bidimensionale; (c)
tridimensionale; (d) sull’asse dei tempi; (e) in uno spazio-tempo bidimensionale;
(f ) in uno spazio-tempo tridimensionale.
88
CAPITOLO 5. I COMPLESSI DI CELLE
Capitolo 6
Analisi delle grandezze fisiche
Noi dedichiamo poca attenzione all’introduzione delle grandezze fisiche
che pur sono le pietre sulle quali è fondata la descrizione matematica della
fisica. Solitamente le introduciamo di soppiatto, man mano che ci servono,
senza presentarle, senza analizzarle, spesso senza darne una definizione.
Consideriamo un generico fenomeno fisico. Individuiamo in esso un “causa” che
chiameremo sorgente del fenomeno ed un “effetto” che chiameremo configurazione
del fenomeno.
La sorgente sarà descritta da una variabile fisica che indicheremo con s, dall’iniziale
del termine “sorgente”. L’effetto sarà descritto da una variabile fisica che chiameremo
genericamente “potenziale” e che indicheremo con la lettera V .
Tali variabili possono essere grandezze scalari o vettoriali, grandezze globali o
funzioni del posto.
Vi è una regola valida per tutte le teorie fisiche: se la sorgente è una grandezza
scalare anche il potenziale è una grandezza scalare; se la sorgente è un vettore anche
il potenziale lo è.
Esempi. Nella conduzione termica le sorgenti di calore sono descritte dalla quantità
di calore erogato nell’unità di tempo ovvero da una grandezza scalare. Il corrispondente
“potenziale termico” è la temperatura, che è una grandezza scalare.
Nell’elettrostatica la sorgente è la carica elettrica (scalare) ed il potenziale elettrico è
uno scalare.
Nella meccanica dei solidi deformabili la sorgente è una forza (vettore) ed il potenziale
è lo spostamento (vettore).
Nel campo gravitazionale la sorgente è la massa (scalare) ed il potenziale gravitazionale
è uno scalare.
Nel magnetismo posso prendere come variabile di sorgente il vettore densità di corrente
~
~
J e come potenziale il vettore A.
89
90
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
6.0.3
Le sorgenti del campo
Con il termine campo si intende uno stato fisico dello spazio o della materia che vi è
contenuta.
Ogni campo ha delle sorgenti, cioè delle cause. Cosı̀
i generatori di calore sono le sorgenti del campo termico;
le cariche elettriche in quiete sono le sorgenti del campo elettrico;
le cariche elettriche in moto sono le sorgenti del campo elettromagnetico;
le masse sono le sorgenti del campo gravitazionale;
le forze su un corpo solido sono le sorgenti del campo delle deformazioni;
le forze su un continuo fluido sono le sorgenti del campo delle velocità.
Le sorgenti possono essere concentrate in piccole regioni o in punti o distribuite in
una regione del dominio o in tutto il dominio. Sovente sono distribuite uniformemente
su tutto il dominio (è il caso del peso). Se le sorgenti non variano nel tempo né come
intensità né come distribuzione spaziale, allora il campo da esse generato può essere
costante oppure stazionario. In un simile campo le variazioni delle funzioni di campo
sono solo variazioni spaziali. Se le sorgenti invece variano con il tempo allora anche
il campo da esse generato è variabile nel tempo; le variazioni delle funzioni di campo
sono sia spaziali che temporali.
6.0.4
I potenziali del campo
La configurazione di un campo è descritta da una o più funzioni del posto e del tempo
alle quali si dà il nome di potenziali del campo. Tali sono il potenziale elettrico,
quello gravitazionale (usato in geodesia), la temperatura (potenziale termico), lo spostamento nella meccanica dei solidi, la velocità in quella dei fluidi, ecc. La tavola (I)
mostra i potenziali e le sorgenti di diversi campi.
6.1
Classificazione delle grandezze
Classificare vuol dire dividere in classi. Si divide un insieme di elementi o di nozioni
in classi al fine di mettere ordine; si mette ordine per lavorare con più facilità, per
semplificare, per facilitare la comprensione e per tante altre ragioni. Ogni classificazione si basa su un criterio: il successo e l’utilità di una classificazione sta nel criterio
scelto. Il criterio che intendiamo presentare è quello del ruolo che la grandezza svolge
nell’ambito di una teoria.
Per fare una analogia si possono classificare gli uomini secondo la loro razza,
bianca, gialla, nera, australiana, ecc. oppure secondo il ruolo che svolgono nella
società: casalinghe, operai, impiegati, dirigenti, ecc.
6.2. I PARAMETRI FISICI
91
Tavola I: I potenziali e le sorgenti dei principali campi della fisica classica.
campo
potenziale
sorgente
elettrico
potenziale elettrico V
carica elettrica Q
gravitazionale potenziale gravitazionale V
massa m
termico
temperatura T
generazione di calore P
elastico
spostamento ~u
forza F~
fluidodinamico velocità ~v
forza F~
velocità dilatazione volumica θ pressione p
~ densità di corrente J~
magnetico
potenziale vettore magnetico A
Ebbene la più spontanea classificazione basata sul ruolo svolto dalla grandezza è
quella che distingue le costanti fisiche e le variabili fisiche. Questi termini sono
convenzionali1 e non impediscono che una variabile mantenga costante il suo valore
durante un processo e quindi si comporti da costante cosı̀ come non impediscono ad
una costante di dipendere da un’altra grandezza, ad esempio la temperatura, e quindi
di comportarsi da variabile.
Una prova della validità di questa tradizionale classificazione sta nel fatto che
esistono libri che raccolgono i valori delle costanti fisiche.
In matematica il termine “parametro” denota una quantità che è costante in un
dato contesto ma che può assumere diversi valori nel passare da un contesto all’altro.
Ad esempio una retta ha l’equazione parametrica y = a x + b: le quantità a e b
sono parametri mentre x ed y sono variabili. I parametri a e b caratterizzano una
retta: assegnando loro un valore si precisa una determinata retta. Per tener conto
della possibile variazione delle “costanti” fisiche è opportuno usare per esse il nome
di parametri fisici. Si ha quindi la seguente suddivisione
grandezze fisiche
6.2
parametri fisici
(6.1)
variabili fisiche
I parametri fisici
Con questo nome si intendono quelle grandezze che caratterizzano la natura di un
sistema fisico. Anche i parametri, a loro volta, possono classificarsi in funzione del
ruolo che svolgono in una teoria: vi sono parametri che caratterizzano un sistema
nella sua globalità, altri che caratterizzano un materiale, altri che intervengono nelle
interazioni tra due campi, altri che descrivono un processo, ecc.
1
Agazzi [2, p.178]
92
6.3
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
Le variabili fisiche
Le variabili fisiche sono quelle grandezze che specificano un attributo variabile di
un sistema, come l’energia potenziale e quella cinetica di un sistema, l’intensità di
una sorgente, il potenziale elettrico in un punto, l’allungamento di un’asta, i flussi
scambiati tra due sistemi, ecc.
Vi è una prima classificazione poco nota ma molto utile: è quella che individua tre
classi di variabili fisiche in funzione del ruolo che esse svolgono in una teoria: variabili
di configurazione, variabili di sorgente e variabili energetiche. Faremo riferimento alla
tavola II.
6.3.1
Variabili di configurazione
Sono quelle che danno la configurazione di un sistema fisico e tutte quelle legate a
queste da operazioni di somma, differenza, passaggio al limite, derivazione e integrazione, divisione per una lunghezza, un’area, un volume e per un intervallo di tempo.
Queste relazioni non devono contenere costanti fisiche. A questa classe appartengono
le variabili geometriche e cinematiche della meccanica dei continui quali gli spostamenti, le velocità, le velocità angolari, le coordinate generalizzate della meccanica
analitica, i potenziali, le affinità della termodinamica irreversibile, ecc.
6.3.2
Variabili di sorgente
Sono quelle che descrivono le sorgenti di un campo e tutte quelle variabili che sono
legate ad esse da operazioni di somma, differenza, passaggio al limite, derivazione e
integrazione, divisione per una lunghezza, un’area, un volume e un intervallo di tempo.
Queste relazioni non devono contenere costanti fisiche. A questa classe appartengono
le variabili statiche e dinamiche della meccanica dei continui, quali le forze, la quantità
di moto, il momento angolare, l’imulso, ecc che creano il campo gravitazionale, le
cariche elettriche che creano il campo elettrico, le correnti, le forze generalizzate della
meccanica analitica, ecc.
6.3.3
Variabili energetiche
Sono le variabili ottenute dal prodotto di una variabile di configurazione per una
variabile di sorgente. Fra queste il lavoro, l’energia nelle sue diverse forme, come
l’energia potenziale, l’energia cinetica, l’energia interna, l’energia libera, l’energia di
campo; la potenza, la co-energia, le funzioni di Lagrange e di Hamilton, l’azione, ecc.
6.4. VARIABILI GLOBALI NELLO SPAZIO
parametri fisici
variabili di configurazione
grandezze fisiche
variabili di sorgente
variabili fisiche
93
(6.2)
variabili energetiche
Osservazione. Questa classificazione è stata introdotta da Hallen nel 1947 [27, p.1],
quindi indipendentemente da Penfield e Haus nel 1967 [49, p.155] e, indipendentemente, dal
presente autore nel 1972 [62], [63]. La tabella che segue confronta la terminologia dei tre
autori.
Hallen
Penfield
attuale
6.4
variabili di forza
variabili geometriche
variabili di configurazione
variabili di sorgente
variabili meccaniche
variabili di forza
variabili di sorgente variabili energetiche
Variabili globali nello spazio
Di solito si mettono in evidenza tre caratteristiche delle grandezze fisiche:
il campo a cui appartengono (ottica, acustica, fisica atomica, ecc.);
le dimensioni fisiche (ad esempio: M LT −2 );
la natura matematica (scalari, pseudoscalari, vettori, vettori assiali, ecc).2
Ebbene: cosa altro si può dire sulle grandezze fisiche che non sia già stato detto?
Il grande fisico inglese James Clark Maxwell [40], aveva richiamato l’attenzione
sul fatto che alcune grandezze sono associate alle linee, altre alle superfici. Questa
distinzione non è stata recepita dalla letteratura successiva. Se si aggiunge che vi sono
grandezze fisiche associate ai punti ed altre associate ai volumi, tradizionalmente le
intensive e le estensive presentate in termodinamica, si vede far capolino un’altra
possibile classificazione delle grandezze basata sulla naturale associazione che molte
di esse hanno ai quattro elementi spaziali, cioè ai punti, alle linee, alle superfici ed ai
volumi, come vedremo nel seguito.
I punti, le linee, le superfici ed i volumi sono i mattoni costitutivi degli elementi
dello spazio: essi sono delle varietà di dimensione 0,1,2 e 3 rispettivamente.
In tutti i campi della fisica si trovano variabili fisiche associate ad uno dei quattro
elementi spaziali:
• sono associate ai punti:
la temperatura T [P]
il potenziale elettrico V [P]
il potenziale gravitazionale Vg [P]
lo spostamento ~u[P] di un punto.
94
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
Tavola II: Una classificazione delle grandezze fisiche in base al ruolo da
esse svolto in una teoria.
variabili
di configurazione
variabili geometriche
e cinematiche
coordinate generalizzate
spostamento, velocità
tensore di deformazione
velocità di deformazione
vorticità, vel. angolare
potenziale velocità
acceleraz. gravità
frequenza, vettore d’onda
fase, differenza di fase
potenziale gravitazionale
temperatura, affinità
potenziale chimico
potenziale elettrico
vettore campo elettrico
flusso magnetico
induzione magnetica
ecc.
parametri (o costanti)
capacità termica
costante dielettrica
carica dell’elettrone
massa del protone
conducibilità termica
resistenza elettrica
modulo di elasticità
temperatura di fusione
numero di Avogadro
numero di Reynolds
velocità del suono
indice di rifrazione
velocità della luce
costante di Planck
viscosità
ecc.
?
variabili energetiche
lavoro, calore
energia potenziale
energia cinetica
energia interna
energia libera
energia elettrom.
potenza
densità di energia
vettore di Poynting
funzione di Lagrange
funzione di Hamilton
azione
ecc.
variabili
di sorgente
variabili statiche
e dinamiche
forze generalizzate
forza, impulso
quantità di moto
massa gravitazionale
densità di massa
momento angolare
pressione, sforzo
entropia
flussi termodinamici
carica elettrica
flusso dielettrico
corrente elettrica
vettore campo magnetico
vettore induz. elettrica
potenziale magnetico
ecc.
6.4. VARIABILI GLOBALI NELLO SPAZIO
• sono associate alle linee:
95
il lavoro di una forza lungo una linea W [L];
la tensione elettrica lungo una linea U [L]
la tensione magnetica Fm [L̃];
l’allungamento di un segmento ∆L[L].
il flusso magnetico Φ[S];
il flusso elettrico Ψ [S];
• sono associati alle superfici:
il calore attraverso una superficie Q[S];
il flusso di carica elettrica Q[S].
la massa M [V] contenuta in un volume;
la carica elettrica Q[V] contenuta in un volume;
• sono associate ai volumi:
la quantità di moto P~ [V] entro un volume
~
la forza di volume F [V].
Si veda la tavola (VIII).
Per indicare la associazione di queste grandezze agli elementi spaziali abbiamo
posto l’elemento stesso entro parentesi quadra. Questa notazione ha il pregio di
essere in armonia con la notazione che usa la parentesi tonda per indicare le comuni
funzioni di punto. Ad esempio
Z
M [V] =
Z
ρ(P) dV
V
Φ[S] =
S
~
~
B(P)
· dS
Z
W [L] =
L
~
F~ (P) · d L
(6.3)
~
Mentre le grandezze ρ(P), B(P),
F~ (P) sono delle funzioni del punto, le grandezze
corrispondenti M [V], V [S], W [L] sono delle funzioni di dominio. Queste ultime variabili, ottenute per integrazione delle funzioni di punto su un dominio tridimensionale (V), bidimensionale (S) e unidimensionale (L), si chiamano solitamente grandezze
integrali o grandezze globali. Noi useremo sistematicamente il termine grandezze
globali.
Il fatto di preferire l’espressione variabile globale in luogo di variabile integrale
risiede nella constatazione che in laboratorio si misurano principalmente variabili globali e che quelle locali si deducono per formazione della relativa densità. Cosı̀ nella
meccanica dei solidi si misura l’allungamento di un segmento mediante un estensidef
metro e successivamente si valuta l’allungamento unitario ² = ∆L/L. Nell’elettromagnetismo si misurano correnti, flussi e tensioni che sono grandezze globali nello
~ B,
~ D,
~ E,
~ H.
~
spazio: successivamente si valutano le corrispondenti densità ρ, J,
Questa naturale associazione delle variabili globali agli elementi spaziali è comunemente sottintesa: noi intendiamo metterla in evidenza e farne oggetto di una accurata
analisi in quanto essa si rivelerà preziosa per ottenere una razionale classificazione
delle variabili fisiche e delle equazioni che le legano.
96
6.4.1
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
La proprietà addittiva
Ci proponiamo di mostrare che le variabili globali soddisfano, per definizione, la
proprietà addittiva sui relativi elementi spaziali.
Linee. Consideriamo ora una grandezza fisica globale associata alle linee. Tale è,
ad esempio il lavoro W di una forza lungo una linea L in un campo di forze. Anche
qui la grandezza è addittiva. Questo significa che, dividendo la linea in tanti pezzi
Lk , vale la proprietà
se
L=
[
Lk
ne viene
W [L] =
k
X
W [Lk ].
(6.4)
k
Anche questa proprietà vale, evidentemente, per tutte le grandezze globali associate
alle linee. Consideriamo ad esempio il dislivello tra due punti di una strada in montagna: se d1 e d2 sono i dislivelli relativi ai tratti di strada L1 ed L2 evidentemente il
dislivello relativo ai due tratti è d1 + d2 .
Superfici. Consideriamo della materia che fluisce attraverso una superficie S̃. Se
dividiamo la superficie in tanti pezzi S̃k la materia che fluisce su tutta la superficie è
la somma di quelle che fluiscono sui singoli pezzi. In formule
se
S̃ =
[
S̃k
ne viene
Q[S̃] =
k
X
Q[S̃k ].
(6.5)
k
È evidente che tale addittività, che solitamente diamo per scontata per il solo fatto
che eseguiamo delle integrazioni sulle superfici, sussiste per tutti i flussi, non solo per
quelli di materia. Infatti la stessa cosa vale per il flusso di energia, di carica elettrica,
di entropia, per il flusso magnetico, ecc.
Volumi. Consideriamo infine una grandezza globale associata ai volumi, quale la
massa M contenuta entro un volume. Se dividiamo il volume Ṽ in tanti pezzi Ṽk
vale la proprietà
se
Ṽ =
[
Ṽk
ne viene
k
M [Ṽ] =
X
M [Ṽk ].
(6.6)
k
Questa è la tradizionale proprietà addittiva che presentano le grandezze estensive
usate nella termodinamica. Fra queste ricordiamo il contenuto di carica, il contenuto
di entropia, il contenuto di energia, il contenuto di quantità di moto.
Vale la pena di osservare che questa addittività vale se i pezzi degli elementi
spaziali non si sovrappongono, ovvero se sono disgiunti. In simboli
L1 ∩ L2 ∩ ... ∩ Ln = ∅
S1 ∩ S2 ∩ ... ∩ Sn = ∅
V1 ∩ V2 ∩ ... ∩ Vn = ∅ (6.7)
Quindi la addittività è una proprietà generale delle grandezze globali associate ad
elementi spaziali dotati di misura.
6.4. VARIABILI GLOBALI NELLO SPAZIO
6.4.2
97
Le densità di linea, di superficie e di volume
Dalle grandezze globali si formano le grandezze densitarie dividendole per la misura
dell’elemento spaziale al quale sono associate. Si ottengono cosı̀ le densità medie
di linea, di superficie o di volume. Le grandezze densitarie, brevemente chiamate
densità, sono funzioni del posto.
Cosı̀ la densità di massa, la densità di carica, la densità di entropia, la densità di
quantità di moto sono funzioni del posto. Si può precisare meglio questa dipendenza
osservando che il semplice rapporto tra la massa ed il volume è una densità media
e, come tale, eredita una associazione ai volumi. Solo quando si fa il limite di tale
rapporto facendo contrarre il volume ad un punto la densità diventa funzione del
punto. Per le densità di volume avremo
M [Ṽ]
(6.8)
V →0
Ṽ
In modo simile, considerato un elemento di superficie piana di normale ~n definiremo
~ mediante la formula
implicitamente il vettore induzione magnetica B
def
M [Ṽ] = hρi Ṽ
−→
ρ = lim
def ~
~
Φ[S] = hBi
·S
−→
Bn = lim
def
Φ[S]
S→0 Sn
(6.9)
~
ed infine, indicato con ~t il versore tangente ad un elemento di linea retta L
def
~
W [L] = hF~ i · L
−→
def
W [L]
L→0
L
Ft = lim
(6.10)
Per il fatto che le grandezze densitarie sono ottenute da quelle globali, sarà naturale tener conto della dipendenza indiretta che le densità hanno con l’elemento spaziale
al quale sono associate le rispettive grandezze globali. Si potrebbe chiamare questa
“dipendenza ereditaria”. Per le grandezze densitarie useremo le due espressioni
• diremo che è associata ad un elemento spaziale per intendere che la grandezza
globale corrispondente è associata a quell’elemento spaziale.
• diremo che è funzione del punto per intendere che dipende dal punto.
Con questo criterio3
la densità di carica elettrica diremo che è associata al volume ma che è funzione
del punto; la pressione diremo che è associata alla superficie ma che è funzione del
~ è associato alle linee ma è funzione del punto.
punto; il vettore campo elettrico E
Esempi di variabili globali nello spazio e nel tempo sono riportati nella tavola (VIII).
3
Avvisiamo il lettore che l’introduzione di questa distinzione tra i due termini, dovuta al presente
autore, deve essere sempre esplicitata per evitare incomprensioni o contestazioni.
98
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
Osservazione. È opportuno dire subito, a scanso di equivoci, che questa associazione
non riguarda tutte le variabili fisiche; che i criteri di associazione non sono sempre evidenti
e che per alcune grandezze vi sono ambiguità nell’associazione.
Queste ambiguità sono quasi sempre riconducibili ad una ambiguità nella denominazione
di una grandezza che non è completamente specificata da un solo termine o al fatto che
l’associazione è relativa al “punto di vista”, quali il punto di vista lagrangiano o euleriano.
Poniamoci la domanda: a quale elemento spaziale è associata una forza? Vi sono forze
di volume, quali è il peso e la forza d’inerzia che sono associate ai volumi, come è ovvio;
vi sono forze di superficie, quali la spinta che un corpo riceve quando è immerso in un
fluido, che sono associate alle superfici. In un campo di forze queste sono associate alle linee
come conseguenza del fatto che esse danno luogo a circolazioni del vettore lungo una linea e
quindi a tensioni: tipica è la forza agente su una particella carica che dà luogo alla tensione
elettrica, grandezza associata alla linea.
6.5
Associazione agli elementi spaziali
Riguardo le grandezze fisiche si parla delle dimensioni delle grandezze, della loro
natura matematica, scalari, vettori, tensori; del fatto che siano vettori assiali o polari;
dell’essere costanti fisiche o variabili fisiche. Raramente si parla della distinzione tra
grandezze globali e loro densità. Raramente si distinguono le variabili nelle tre classi:
variabili di configurazione, di sorgente ed energetiche. Conseguenza di questa mancata
distinzione è il fatto che non sia stato messo in evidenza il fatto fondamentale che le
variabili globali di ogni teoria fisica sono associate ad un elemento spaziale.
Le grandezze fisiche globali dell’elettromagnetismo che sappiamo misurare sono
sei:
sorgente configuraz
grandezze globali: Qc Qf
E
Φ
discreto
|
|
|
densità e tassi (medi): hρi hii hEi
densità e tassi:
al limite
grandezze di campo:
ρ
↓
ρ
i
↓
J~
E
↓
~
E
|
↓
~
B
sorgente
Ψ
Fm
|
|
hσi hFm i
σ
↓
~
D
(6.11)
Fm
↓
~
H
Notiamo che le grandezze globali dell’elettromagnetismo sono di tipo scalare e che
i vettori nascono come conseguenza della associazione delle grandezze globali a linee
e superfici e sono richieste dalla formulazione differenziale. Quindi la formulazione
discreta dell’elettromagnetismo utilizza solo grandezze scalari.
Se facciamo attenzione alla definizione operativa che abbiamo dato constateremo
che le grandezze globali sono associate agli elementi spaziali fondamentali, tali sono
6.5. ASSOCIAZIONE AGLI ELEMENTI SPAZIALI
99
Tavola III: Le variabili globali dell’elettromagnetismo da usarsi nella formulazione finita e le corrispondenti funzioni di campo della formulazione
differenziale.
formulazione finita
contenuto di carica elettrica Qc
flusso di carica elettrica Qf
impulso di tensione E
impulso di tensione magnetica Fm
flusso magnetico Φ
flusso elettrico Ψ
→
→
→
→
→
→
formulazione differenziale
ρ densità di carica elettrica
J~ densità di corrente elettrica
~ intensità del campo elettrico
E
~ intensità del campo magnetico
H
~ induzione magnetica
B
~ induzione elettrica
D
i punti, le linee, le superfici ed i volumi, alcuni dotati di orientazione interna, altri di
orientazione esterna.
Per renderci meglio conto di questa associazione consideriamo una regione di spazio entro la quale ha sede un campo elettrico. Ci sarà comodo introdurre una complesso di celle, ad esempio formato di parallelepipedi, come indicato in figura (6.2), in
quanto esso ci consente di evidenziare gli elementi fondamentali dello spazio. Questi
sono i punti (P) che si identificano con i vertici delle celle; le linee (L) che si identificano con gli spigoli; le superfici (S) che si identificano con le facce ed i volumi (V)
che si identificano con le celle.
Indichiamo con Qc la carica contenuta in una cella. Il fatto stesso che si usi il
termine “contenuto” indica che è stato definito un interno ed un esterno: questo
indica che il volume è orientato con le normali uscenti o entranti ovvero possiede
una orientazione esterna. Indichiamo con Ψ il flusso elettrico relativo ad una faccia:
occorre distinguere i due lati della faccia ovvero occorre usare l’orientazione esterna.
Dovendo ora considerare il potenziale elettrico è naturale associarlo ai punti “centrali”
delle celle, ad esempio ai loro baricentri. Ne viene che la tensione elettrica è associata
alle congiungenti i baricentri. Si delinea in tal modo un secondo complesso di celle,
che ha come vertici i “centri” delle celle.
Questo secondo complesso lo chiameremo primale mentre il complesso di partenza
verrà chiamato duale.
Si vede cosı̀ che le quattro grandezze globali dell’elettrostatica, rispettivamente il
potenziale V , la differenza di potenziale U , il flusso elettrico Ψ e la carica contenuta
Qc hanno un naturale referente spaziale. Due grandezze sono riferite agli elementi
spaziali di un complesso, altre due a quelli di un complesso duale.
Consideriamo ora una regione di spazio entro la quale ha sede un campo magnetico.
Introdotti due complessi di celle duali l’uno dell’altro, indichiamo con Gc la “carica
magnetica” contenuta in una cella4 e con Φ il flusso magnetico relativo ad una faccia.
4
Alcuni fisici ritengono che possa esistere a livello quantistico una carica magnetica isolata, una
100
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
space association
source variables
outer orientation
dual complex
configuration variables
inner orientation
primal complex
ph
V [τ n , ph ] electric potential impulse
electric charge conten t Qc[t̃n , ṽh ]
ṽh
lα
electric flux Ψ [t̃n , s̃α ]
E [τ n , lα ] electric voltage impulse
electric charge flow Qf [τ̃ n , s̃α ]
s̃α
sβ
Φ[tn , sβ ] magnetic flux
magnetic voltage impulse Fm[τ̃ n , l̃ β ]
l̃β
magnetic potential impulse Vm[τ̃ n , p̃k ]
p̃k
vk
time association
Qf[τ̃ n , s̃α ]
Fm[τ̃ n , l̃β ]
Ψ [t̃n , s̃α ] Vm[τ̃ n , p̃k ]
Qc[t̃n , ṽh ]
source variables
outer orientation
dual complex
τ̃ n
t̃n+1
t̃n
tn−1
configuration variables
inner orientation
primal complex
timeaxis
tn
τn
E [τ n , lα ]
V [τ n , ph ]
Φ[tn , sβ ]
Figura 6.1: L’associazione delle grandezze elettromagnetiche agli elementi spaziali
e temporali.
6.6. ASSOCIAZIONE AGLI ELEMENTI TEMPORALI
electric potential V
refers to the points
of the primal complex
electric field
101
electric charge content Qc
refers to the volumes
of the dual complex
electric flux Ψ
refers to the surfaces
of the dual complex
e.m.f. E
refers to the lines
of the primal complex
magnetic field
magnetic flux Φ
refers to the surfaces
of the primal complex
magnetic charge content Gc
refers to the volumes
of the primal complex
magnetic potential Vm
refers to the points
of the dual complex
m.m.f.
Fm
refers to the lines
of the dual complex
Figura 6.2: Gli elementi spaziali a cui sono associate le grandezze globali
dell’elettromagnetismo.
Dovendo ora considerare il potenziale magnetico Vm è naturale associarlo ai vertici
delle celle duali. Ne viene che la differenza di potenziale magnetico, ovvero la tensione
magnetica Fm è associata ai lati del complesso duale.
Si vede cosı̀ che le quattro grandezze globali della magnetostatica, rispettivamente
il potenziale magnetico Vm , la differenza di potenziale Fm , il flusso magnetico Φ e la
carica magnetica contenuta Gc hanno un naturale referente spaziale.
Due grandezze sono riferite agli elementi spaziali di un complesso, altre due a
quelli di un complesso duale. Una analisi parallela consente di mettere in evidenza
l’associazione delle grandezze globali agli elementi del tempo.
6.6
Associazione agli elementi temporali
Finora abbiamo considerato complessi di celle nello spazio. Ora consideriamo un
complesso di celle nel tempo.
Consideriamo l’asse dei tempi e dividiamolo in tanti piccoli intervalli (primali)
come indicato nella tavola (IV)
Gli istanti primali sono orientati come pozzi, come avviene per i punti dello spazio.
Questo è conseguenza della convenzione che vuole che l’incremento di una funzione
def
sia definito come ∆t f = +f (t + τ ) − f (t). In questa espressione i segni ”+” e ”-”
carica “nord” ed una “sud”, i cosı̀ detti monopoli . È stato mostrato da Dirac che la esistenza dei
monopoli potrebbe spiegare il fatto che la carica elettrica sia quantizzata: si veda [57, p.134], [31,
p.251]
102
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
Tavola IV: A time cell complex and its dual.
dual
primal
t̃n
-
tn−1
-
τn
-
τ̃ n
-
tn
t̃n+1
-
- - t
tn+1
τ n+1
si possono considerare come i numeri di incidenza +1 e -1 tra l’intervallo τ e i due
def
istanti t e t + τ , ovvero ∆t f = (+1) f (t + τ ) + (−1) f (t).
Gli intervalli primali, indicati con ..., τ n , τ n+1 , ..., sono dotati di orientazione
interna, vale a dire sono orientati nel senso degli istanti crescenti ..., tn−1 , tn , tn+1 , ....
Usando il principio che gli elementi del complesso duale subiscono l’orientazione
delle corrispondenti celle primali, ne viene che gli istanti duali ..., t̃n , t̃n+1 , ... sono
dotati di orientazione esterna, vale a dire hanno la stessa orientazione degli intervalli
primali.
Per lo stesso principio gli intervalli duali ..., τ̃ n , τ̃ n+1 , ... sono dotati di orientazione
esterna, in quanto subiscono l’orientazione interna degli istanti primali.
L’inversione temporale è null’altro che l’inversione dell’orientazione interna degli
intervalli del complesso primale e coincide, per definizione, con l’inversione dell’orientazione degli istanti duali. Ne viene che se una grandezza è associata agli intervalli
del primale o agli istanti del duale essa cambia segno per inversione temporale e, viceversa, se una grandezza è associata agli intervalli del duale o agli istanti del primale
essa non cambia segno per inversione temporale.
Le variabili di sorgente sono riferite ad elementi spaziali e temporali dei relativi
complessi duali. È evidente che la carica elettrica contenuta sia riferita agli istanti
di tempo mentre quella fluente sia riferita agli intervalli: rimane ora da stabilire se
istanti ed intervalli sono del complesso primale o duale. Dal momento che la carica
contenuta è riferita ai volumi del complesso duale dotati di orientazione esterna, è
naturale, per coerenza con la descrizione relativistica, che anche gli istanti siano quelli
del complesso duale. Quindi scriveremo Qc [Ĩ, Ṽ]. Ne viene che il flusso di carica è
riferito agli intervalli del duale: Qf [T̃, S̃].
Dal momento che il flusso elettrico è la carica riferita ad una superficie con
orientazione esterna ne viene che pure esso è riferito agli istanti del duale: Ψ [Ĩ, S̃].
L’impulso di tensione magnetica è, per definizione, l’opposto del flusso di carica
che passa nella bobina compensatrice in un dato intervallo di tempo e quindi anch’esso
è associato all’intervallo duale: Fm [T̃, L̃].
Le variabili di configurazione sono riferite agli elementi spaziali del complesso
primale, dotati di orientazione interna. Per coerenza con la descrizione relativistica
esse sono riferite agli elementi temporali del complesso primale dell’asse dei tempi.
6.6. ASSOCIAZIONE AGLI ELEMENTI TEMPORALI
103
In sintesi
Qc [Ĩ, Ṽ]
Qf [T̃, S̃]
Ψ [Ĩ, S̃]
Fm [T̃, L̃]
E[T, L]
Φ[I, S]
(6.12)
La associazione delle variabili globali dell’elettromagnetismo agli elementi temporali
è riassunta in figura (6.3) nonché nella figura (6.1) a pagina 100.
complesso di celle primale
orientazione interna
complesso di celle duale
orientazione esterna
flusso elettrico Ψβ
corrente elettrica Iβ
c
carica elettrica Qh
tensione magnetica Umα
˜sβ
pk
lβ
ṽh
˜lα
sγ
sα
tensione elettrica Uβ
flusso magnetico Φα
Figura 6.3: Associazione delle grandezze globali dell’elettromagnetismo alle celle
di un complesso e del suo duale.
104
CAPITOLO 6. ANALISI DELLE GRANDEZZE FISICHE
Capitolo 7
Analisi delle equazioni fisiche
I libri di fisica e quelli di tecnica sono pieni di formule: se ne scrivono tante,
spesso se ne scrivono troppe. Siamo tutti consapevoli che mescolando poche
equazioni in modi diversi se ne possono ottenere molte altre e spesso ci divertiamo a moltiplicarle dimenticando che il lettore sarà frastornato dalle troppe
formule. In un mare di formule c’è il naufragio dei concetti! Raramente ci fermiamo ad esaminare i diversi tipi di equazioni, a vedere come sono composte,
quali ne sono gli elementi costitutivi.
7.1
Le leggi di campo
Una legge è una relazione che lega (legge=lex=lega) gli attributi di uno o più sistemi
e che quindi descrive un fenomeno. Essa può essere qualitativa o quantitativa. Se
gli attributi del fenomeno sono quantitativi si possono esprimere con delle grandezze fisiche e allora la legge fisica è espressa da formule matematiche che legano tali
grandezze, ovvero da equazioni. Le equazioni presenti in ogni teoria fisica sono il
risultato della composizione di equazioni appartenenti ai tre tipi seguenti
• equazioni di struttura, dette anche equazioni di campo;
• equazioni costitutive dette anche equazioni materiali o fenomenologiche, talvolta equazioni di stato o equazioni di comportamento.
• equazioni di definizione, che servono a definire le densità, i tassi, le grandezze
energetiche, ecc.
Componendo fra loro equazioni di questi tre tipi si ottengono le equazioni fondamentali che legano le sorgenti del campo con i corrispondenti potenziali del
campo.
105
106
7.2
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
Equazioni di struttura
Le equazioni di struttura sono quelle equazioni che legano fra loro le variabili di configurazione e quelle che legano fra loro le variabili di sorgente. Quindi sono le equazioni
che legano fra loro le variabili fisiche associate alle celle di uno stesso complesso. Esse
sono:
• le equazioni di bilancio che utilizzano un volume V ed il suo bordo ∂V oppure
Ṽ e ∂ Ṽ ;
• le equazioni circuitali che utilizzano una superficie S ed il suo bordo ∂S oppure
S̃ e ∂ S̃;
• le differenze spaziali che utilizzano una linea L ed i suoi due estremi ∂L oppure
L̃ e ∂ L̃ ;
• le differenze temporali che legano un intervallo T con i suoi istanti estremi ∂T
oppure T̃ e ∂ T̃.
È una caratteristica delle equazioni di struttura di riferirsi ad una varietà p-dimensionale
ed al suo bordo di dimensione(p − 1). Con riferimento alle tavole di pagina 127 e seguenti le equazioni di struttura connettono le grandezze contenute in una colonna con
quelle della stessa colonna. Esse hanno alcuni aspetti comuni:
1. coinvolgono i quattro elementi spaziali P, L, S, V ed i due elementi temporali
I, T nonché le loro combinazioni. Si tratta di 4×2 = 8 elementi. Tenuto conto
che ciascuno di questi elementi possiede due orientazioni, interna o esterna, vi
sono in totale 8×2 = 16 elementi.
2. esse valgono qualunque sia la forma e l’estensione degli elementi spazio-temporali
coinvolti: sono indipendenti da proprietà metriche vale a dire non utilizzano la
nozione di lunghezza, area, volume (nel senso di misura di una regione) e di
durata in questo senso esse sono equazioni topologiche;
3. non coinvolgono parametri materiali;
Per queste ragioni esse verranno chiamate equazioni di struttura.
Il punto (2) implica che le equazioni di struttura siano valide sia in un contesto
finito che in uno infinitesimo. Per esempio l’equilibrio si può applicare ad un atomo in
un reticolo cristallino (10−10 m) cosı̀ come ad una nave (102 m) alla fonda: in entrambi
i casi la somma delle forze di superficie e di quelle di volume deve essere nulla.
Questo implica che non sono le equazioni di struttura le responsabili della formulazione differenziale delle leggi fisiche.
Useremo i seguenti simboli per le grandezze globali:
7.2. EQUAZIONI DI STRUTTURA
107
Qc [Ṽ, Ĩ] la carica elettrica contenuta in un volume Ṽ ad un istante Ĩ;
Qf [S̃, T̃] la carica che fluisce attraverso la superficie S̃ durante l’intervallo T̃
Ψ [S̃, Ĩ]
il flusso elettrico sulla superficie S̃ all’istante Ĩ;
Fm [L̃, T̃] l’impulso di forza magnetomotrice lungo la linea L̃ nell’intervallo T̃
F[L, T]
l’impulso di forza elettromotrice lungo la linea L nell’intervallo T
Φ[S, I]
il flusso magnetico relativo alla superficie S ad un istante I
Tavola I: Le grandezze elettromagnetiche
variabili di sorgente
globali
Qc [Ṽ, Ĩ] Qf [S̃, T̃] Fm [L̃, T̃] Ψ [S̃, Ĩ] E[L, T]
tassi
densità
variabili di configurazione
ρ(~r, t)
I[S̃, T̃]
Fm [L̃, T̃]
~j(~r, t)
~ r, t)
H(~
Φ[S, I]
E[L, I]
~ r, t)
~ r, t) E(~
D(~
~ r, t)
B(~
Le grandezze dell’ultima riga sono funzioni di campo, scalari e vettoriali.
7.2.1
Legge di conservazione della carica
L’incremento della carica contenuta entro un volume, durante un intervallo di tempo, è opposto alla carica uscita dal bordo del volume durante
il medesimo intervallo.
Qc [Ṽ, Ĩ+ ] − Qc [Ṽ, Ĩ− ] + Qf [∂ Ṽ, T̃] = 0
(7.1)
Per arrivare alla formulazione differenziale si dividono i due membri per la durata T̃
dell’intervallo T̃ quindi si effettua un passaggio al limite:
Qc [Ṽ, Ĩ+ ] − Qc [Ṽ, Ĩ− ]
+ I[∂ Ṽ, Ĩ] = 0
T̃
Z
Z
d
~=0
~j(~r, t) · dS
ρ(~r, t) dV +
dt Ṽ
∂ Ṽ
Z
Ṽ
Z
∂t ρ(~r, t) dV +
Ṽ
∇ · ~j(~r, t) dV = 0
(7.2)
(7.3)
(7.4)
dovendo valere per qualunque volume dovrà essere
∂t ρ(~r, t) + ∇ · ~j(~r, t) = 0
(7.5)
Gli esperimenti conducono alle seguenti quattro leggi del campo elettromagnetico.
108
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
7.2.2
Legge d’induzione elettrostatica
Il flusso elettrico indotto sul bordo di un volume ad ogni istante è uguale
alla carica contenuta nel volume a quell’istante.
Ψ [∂ Ṽ, Ĩ] = Qc [Ṽ, Ĩ]
(7.6)
Per passare alla formulazione differenziale scriviamo
Z
∂ Ṽ
Z
Ṽ
Z
~ r, t) · dS
~=
D(~
ρ(~r, t) dV
(7.7)
ρ(~r, t) dV
(7.8)
Ṽ
~ r, t) dV =
∇ · D(~
Z
Ṽ
dovendo valere per qualunque volume dovrà essere
~ r, t) = ρ(~r, t).
∇ · D(~
7.2.3
(7.9)
Legge dell’induzione elettromagnetica
L’impulso della tensione elettrica lungo il bordo di una superficie durante
un intervallo è opposto alla variazione del flusso magnetico attraverso la
superficie durante il medesimo intervallo.
E[∂S, T] + Φ[S, I+ ] − Φ[S, I] = 0
(7.10)
Per ottenere la formulazione differenziale dividiamo per la durata T e passiamo al limite
ottenendo
d
E[∂S, I] +
Φ[S, I] = 0
(7.11)
dt
Z
Z
~ r, t) · dL
~+ d
E(~
dt
∂S
S
~ r, t) dS
~+
∇× E(~
Z
Z
S
~ r, t) · dS
~=0
B(~
(7.12)
~ r, t) · dS
~=0
∂t B(~
(7.13)
S
dovendo valere per qualunque superficie dovrà essere
~ r, t) + ∂t B(~
~ r, t) = 0
∇× E(~
(7.14)
7.2. EQUAZIONI DI STRUTTURA
7.2.4
109
Legge di conservazione del flusso magnetico
Il flusso magnetico totale associato al bordo di un volume ad ogni istante
è nullo.
Φ[∂V, I] = 0
(7.15)
Per passare alla formulazione differenziale
Z
Z
~ r, t) · dS
~=0
B(~
(7.16)
~ r, t) dV = 0
∇ · B(~
(7.17)
~ r, t) = 0
∇ · B(~
(7.18)
∂V
V
inner orientation
volume V
outer orientation
surface S̃
volume Ṽ
surface S
boundary ∂ S
boundary ∂V
boundary ∂ S̃
boundary ∂ Ṽ
Figura 7.1: Le quattro varietà alle quali fanno riferimento le leggi del campo
elettromagnetico.
7.2.5
Legge di Maxwell-Ampère
L’impulso della tensione magnetica lungo il bordo di una superficie durante un intervallo è uguale alla somma della variazione del flusso elettrico
e del flusso di carica attraverso la superficie nell’intervallo.
Fm [∂ S̃, T̃] = Ψ [S̃, Ĩ+ ] − Ψ [S̃, Ĩ− ] + Qf [S̃, T̃]
(7.19)
Dividendo per la durata T e passando al limite si ottiene
Fm [∂ S̃, Ĩ] =
d
Ψ [S̃, Ĩ] + I[S̃, Ĩ]
dt
(7.20)
110
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
Z
Z
~ r, t) · dL
~ = d
H(~
dt
∂ S̃
S̃
~ r, t) · dS
~=
∇× H(~
Z
Z
S̃
S̃
~ r, t) · dS
~+
D(~
Z
~ r, t) · dS
~+
∂t D(~
S̃
~
~j(~r, t) · dS
Z
S̃
~
~j(~r, t) · dS
(7.21)
(7.22)
dovendo valere per qualunque superficie dovrà essere
~ r, t) + ~j(~r, t).
~ r, t) = ∂t D(~
∇× H(~
(7.23)
L’analisi che abbiamo fatto delle grandezze fisiche dell’elettromagnetismo combinata con i rudimenti della topologia algebrica ci consente ora una descrizione
puramente algebrica dell’elettromagnetismo.
7.2. EQUAZIONI DI STRUTTURA
111
z
z
p
τ
t
t
V
p
y
p
x
τ
t
Φ
Φ
x
Φ
y
Um
z
t
Ψ
U
y
Ψ
Um
y
Ψ
x
Um
U
Maxwell-Ampère’s law
z
U
τ
x
U
z
Vm
z
Um
Faraday’s law
Qf
Ψ
y
y
x
magnetic Gauss’law
Φ
x
electric Gauss’law
Qc
Ψ
Figura 7.2: Space-time objects and global variables associated with them. The
picture of the last row is a four-dimensional cube exploded.
112
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
Tavola II: Le due leggi del campo magnetico espresse in varie forme
in forma globale (=valida per una regione finita)
orientazione interna
orientazione esterna
il flusso magnetico
relativo al bordo di un volume
è nullo
la tensione magnetica
relativa al bordo di una superficie
è uguale alla intensità della corrente
che attraversa la superficie.
Φ[bordo volume] = 0
Fm [bordo superficie] = I[superficie]
Φ[∂V] = 0
Fm [∂ S̃] = I[S̃]
in forma integrale
Z
∂V
in forma integrale
Z
~ · dS
~=0
B
∂ S̃
~ · dL
~ =
H
Z
S̃
~
J~ · d S
in forma locale (=valida per una regione infinitesima)
a) nei punti di regolarità
~ =0
div B
a) nei punti di regolarità
~ =0
∇· B
~ = J~
rot H
~ = J~
∇× H
in forma differenziale tensoriale
in forma differenziale tensoriale
∇j B j = 0
εijk ∇j × Hk = J i
o anche (h < i < j)
o anche (h < i < j)
∇j Bij − ∇i jBhj + ∇j Bhi = 0
∇h Hk − ∇k Hh = Jhk
in termini di distribuzioni e cobordo
in termini di distribuzioni e cobordo
δΦ(2) = 0(3)
δUm
(1) = I(2)
con le forme differenziali esterne
con le forme differenziali esterne
1
Bhk dxk ∧ dxk
2!
= 0 (forma pari)
def
φ(2) =
dφ(2)
b) nei punti di discontinuità
condizioni di raccordo
Bn− = Bn+
1
k
jhk dxk ∧ dxk um
(1) = Hk dx
2!
dum
(forma dispari)
(1) = i(2)
def
i(2) =
b) nei punti di discontinuità
condizioni di raccordo
~t
Ht− = Ht+ + K
~
K=corrente
superficiale
7.2. EQUAZIONI DI STRUTTURA
113
Tavola III: Le due leggi del campo elettrico espresse in varie forme
in forma globale (=valida per una regione finita)
orientazione interna
orientazione esterna
la tensione elettrica
relativo al bordo di una superficie
è nulla
il flusso elettrico
relativo al bordo di un volume
è uguale alla carica
contenuta nel volume.
U [bordo superficie] = 0
Ψ[bordo volume] = Q[volume]
U [∂ S̃] = 0
Ψ[∂V] = Q[V]
in forma integrale
Z
∂ S̃
~ · dL
~ =0
E
in forma integrale
Z
∂V
~ · dS
~=
D
Z
V
ρ· dV
in forma locale (=valida per una regione infinitesima)
a) nei punti di regolarità
a) nei punti di regolarità
~ =0
rot E
~ =ρ
div D
~ =0
∇× E
~ =ρ
∇· D
in forma differenziale tensoriale
in forma differenziale tensoriale
ε ∇j Ek = 0
∇j D j = ρ
o anche (h < i < j)
o anche (h < i < j)
∇h Ek − ∇k Eh = 0
∇h Dij − ∇i Dhj + ∇j Dhi = ρ
in termini di distribuzioni e cobordo
in termini di distribuzioni e cobordo
δU(1) = 0
δΨ(2) = Q(3)
con le forme differenziali esterne
con le forme differenziali esterne
ijk
u(1) = Ek dxk
1
Dhk dxk ∧ dxk
2!
(forma pari)
ψ(2) =
d u(1) = 0
b) nei punti di discontinuità
condizioni di raccordo
Et− = Et+
1
ρhij dxh ∧ dxi ∧ dxj
3!
= q(3) (forma dispari)
q(3) =
dψ(2)
b) nei punti di discontinuità
condizioni di raccordo
Dn− = Dn+ + σ
114
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
Tavola IV: Le 6 formulazioni delle equazioni delle equazioni di struttura
del campo elettromagnetico: prima equazione dell’elettrostatica.
discrete formulation
continuous formulation
global formulation
Ψ [∂ Ṽ, Ĩ] = Qc [Ṽ, Ĩ]
−→
Z integral formulation
Z
∂ Ṽ
~ · dS
~=
D
ρ dV
Ṽ
↓
↓
local formulation
(δ = coboundary operator)
differential forms
(d = exterior differential)
δΨ(2) = Q(3)
−→
dψ(2) = q(3)
D+ = D− + σ
n
n
↓
↓
local formulation
differential
equation
X
d˜hα Ψα = Qh
−→
α
global formulation
Φ[∂V, I] = 0[V, I]
−→
~ =ρ
∇· D
D+ = D− + σ
n
n
integral
formulation
Z
∂V
~ · dS
~=0
B
↓
↓
local formulation
(δ = coboundary operator)
differential forms
(d = exterior differential)
δΦ(2) = 0(3)
−→
dφ(2) = 0
B+ = B−
n
n
↓
↓
local formulation
differential
equation
(
X
β
dkβ Φβ = 0k
−→
~ =0
∇· B
+
Bn = Bn−
7.2. EQUAZIONI DI STRUTTURA
115
Tavola V: Le 6 formulazioni delle equazioni delle equazioni di struttura
del campo elettromagnetico: seconda equazione dell’elettromagnetismo.
discrete formulation
continuous formulation
global formulation
E[∂S, T] + Φ[S, ∂T] = 0
Z
−→
∂S
Z
T
integral formulation
~ · dL
~ dt +
E
·Z
S
~ · dS
~
B
¸t2
=0
t1
↓
↓
local formulation
(δ = coboundary operator)
differential forms
(d = exterior differential)
δ Fm
(1) + ∆t Φ(2) = 0(2)
du(1) + φ̇(2) = 0
−→
+
−
Et = Et
↓
↓
local formulation
X
cαβ Eβ + ∆t Φα = 0α
differential equation
~
~ ∂B
∇× E +
−→
∂t
E+ = E−
t
t
β
global formulation
Fm [∂ S̃, T̃] − Ψ [S̃, ∂ T̃] = Q [S̃, T̃] −→
Z
Z
f
∂ S̃
T̃
=0
integral formulation
~ · dL
~ dt −
H
·Z
S̃
~ · dS
~
D
¸t2
Z Z
=
t1
S̃
↓
↓
local formulation
(δ = coboundary operator)
differential forms
(d = exterior differential)
f
δ Em
(1) − ∆t Ψ(2) = Q(2)
−→
dum − ψ̇(2) = i(2)
(1)
H+ = H− + K
t
t
t
↓
↓
local formulation
X
β
cαβ Eβm
− ∆t Ψα =
Qfα
−→
differential equation
~
~ − ∂ D = J~
∇× H
∂t
Ht+ = Ht− + Kt
T̃
~ dt
J~ · d S
116
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
7.3
Equazioni costitutive
Le equazioni che legano le variabili di sorgente con quelle di configurazione di una
stessa teoria fisica prendono il nome di equazioni costitutive 1 . La tavola (VI) mostra
le principali equazioni costitutive della fisica.
Le equazioni costitutive hanno le
configuration variables
source variables
Volumes
Points
Surfaces
Lines
str
uc
tur
er
oa
d
constitutive bridge
I Iconstitutive
bridge
II constitutive bridge
Surfaces
Lines
III constitutive bridge
phenomenology river
Figura 7.3: Le equazioni costitutive sono dei ponti tra le due sponde: quella della
variabili di configurazione e quella delle variabili di sorgente.
seguenti proprietà caratteristiche:
1. legano le variabili di sorgente con quelle di configurazione;
2. dipendono dalla metrica in quanto coinvolgono nozioni di lunghezza, area, volume e richiedono la nozione di perpendicolarità;
3. contengono costanti materiali e parametri del sistema;
4. sono sperimentate e quindi valide in regioni di uniformità del campo.
1
Si chiamano anche equazioni materiali o di stato o fenomenologiche.
7.3. EQUAZIONI COSTITUTIVE
117
Mentre le equazioni di struttura hanno un carattere universale quelle costitutive
hanno un carattere particolare: sono valide entro certi limiti, possono essere diverse
per materiali diversi, ecc. 2 .
7.3.1
Verso la formulazione differenziale
La nostra presentazione dell’elettromagnetismo ha come punto di partenza la definizione operativa delle 6 grandezze globali
Qf
Qc
E
Fm
Φ
Ψ
(7.24)
l’enunciato delle 4+1 leggi del campo in forma discreta (globale) e delle 3 equazioni
costitutive in forma discreta (locale).
Il nostro obiettivo attuale è quello di mostrare come partendo dalla formulazione
discreta si arriva a quella differenziale deducendo le corrispondenti grandezze locali
J~
ρ
~
E
~
H
~
D
~
B
(7.25)
e le 4+1 leggi del campo in forma differenziale e le 3 equazioni costitutive in forma
algebrica.
Questo procedimento è l’opposto di quanto si fa normalmente: di solito si definiscono le grandezze differenziali e si deducono le grandezze integrali.
tradizionale presentazione:
attuale presentazione:
variabili locali
→ variabili globali
variabili globali → variabili locali.
L’abitudine alla scrittura diretta delle grandezze e delle leggi in forma differenziale
nasconde il fatto che il passaggio alla formulazione differenziale avviene i tre tappe:
1. si considerano dapprima regioni in cui i campi elettrici e magnetici siano uniformi per definire le grandezze locali e per poter esprimere le 3 equazioni costitutive
come legame tra queste grandezze locali.
2. Si passa quindi a considerare regioni in cui i campi elettrici e magnetici siano
affini per istituire gli operatori algebrici GRAD, CURL e DIV . Le equazioni
costituive sperimentate in regioni di campo uniforme sono valide anche in campi
affini. Le equazioni del campo di Maxwell, per poter legare le variabili di sorgente con quelle di configurazione hanno bisogno che i campi siano localmente
affini (nei campi uniformi le sorgenti distribuite non possono esistere).
2
Una chiara distinzione tra i due tipi di equazioni si trova in Van Dantzig [71, p.86] che usava
il termine di equazioni di legame per le equazioni costitutive e di equazioni fondamentali per le
equazioni di struttura.
118
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
legge:
N
∆L
÷
S
L
L
N
S
def
σ =
∆L
N
S
def
²=
∆L
L
law
σ = E²
L
- + - + - + -
legge:
+
+
+
+
+
+
+
Ψ
Ψ
U
÷
S
L
S
def
D =
Ψ
S
U
def
E =
U
L
law
D = ²E
L
legge:
n spire
U
Ni
÷
nS
L
S
N spire
def
B =
U
U
nS
def
H =
Ni
L
law
i
B = µH
Figura 7.4: Il confronto tra tre equazioni costitutive diverse mostra chiaramente
l’esistenza di uno stesso modo di procedere.
7.3. EQUAZIONI COSTITUTIVE
119
Tavola VI: Le principali equazioni costitutive.
reversible phenomena
1
Ψ law U
= ²
S
L
D =
2
Φ law Fm
= µ
S
L
B =
law
p = m
def
def
Ψ
S
E =
Φ
S
H =
(dynamics)
4
Hooke
N law ∆l
= E
S
L
5
(shear)
T law ∆l
= G
S
h
6
thermodyn.
∆U = Cv T
7
thermodyn.
law
def
v =
def
σ =
D = ²E
Fm
L
B = µH
∆x
T
p = mv
∆l
L
σ = E²
∆l
h
τ = Eγ
def
∆x
T
3
U
L
def
N
S
def
²=
T
S
def U
u=
V
def
def
τ =
γ =
law
law
law
law
law
law
∆u = cv T
law
p = nR
T
V
irreversible phenomena
8
Newton
T law
∆v
= −µ
S
h
τ =
9
Fourier
Q law
∆T
= −λ
S
L
q =
10
Ohm
Q law
∆V
= −σ
S
L
J =
11
Fick
Q law
∆c
= −D
S
L
q =
12
Darcy
Q law
∆H
= −K
S
L
q =
def
def
def
def
def
∆v
h
τ = −µγ
∆T
L
q = −λp
T
S
γ =
Q
S
p=
Q
S
E =−
Q
S
j =
Q
S
j =
def
def
def
def
def
law
law
∆V
L
J = σE
∆c
L
q = −Dj
∆H
L
q = −Kj
law
law
law
120
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
3. Infine si effettua il passaggio al limite considerando i campi affini come approssimazioni del primo ordine dei campi generici. In questa fase gli operatori
algebrici grad , rot e div divengono operatori differenziali mentre le equazioni
costitutive rimangono di tipo algebrico.
7.3.2
Campi uniformi
Per dedurre dalle grandezze globali le funzioni di campo occorre considerare regioni di
spazio ove il campo possa considerarsi uniforme: infatti mostreremo che in una regione
di uniformità le grandezze globali dipendono linearmente dagli elementi spaziali ai
quali sono associate. Solitamente l’uniformità si enuncia dicendo che i vettori del
campo sono indipendenti dal punto. Questa definizione presuppone la nozione di
vettori di campo che finora non abbiamo introdotto.
Definizione. Diremo che un campo è uniforme quando le grandezze fisiche
associate agli elementi spaziali (punti, linee, superfici e volumi) sono invarianti per
traslazione dell’elemento spaziale al quale fanno riferimento.
La nozione di traslazione è di tipo affine e quindi non coinvolge il confronto di
lunghezze e aree relative a giaciture diverse quindi non coinvolge la metrica.
Il campo elettrico uniforme si realizza nell’interno di un condensatore a facce
piane parallele e indefinite; il campo magnetico uniforme si realizza nell’interno di un
solenoide rettilineo indefinito e un flusso di corrente uniforme si realizza in una vasca
elettrolitica con gli elettrodi a facce piane parallele indefinite.
Dal momento che in laboratorio non esiste nulla di “indefinito” si intende che
i campi sono considerati uniformi relativamente alla sensibilità dello strumento di
misura. Questi ultimi sono caratterizzati da una precisione e sono comunemente
divisi in classi di precisione. Sia manifesta qui la nozione di “tolleranza” che permea
tutta la fisica oltre che la nostra vita di tutti i giorni. Questo indica che l’attributo
“indefinito” implica un processo di passaggio al limite e quindi di una idealizzazione
della realtà. E’ in questo mondo ideale che vive la formulazione differenziale.
Se vogliamo una descrizione più aderente alla realtà dobbiamo introdurre la nozione di “tolleranza”, e accontentarci di descrivere il mondo fisico con un prestabilito
grado di precisione. Questo non può essere reso piccolo a piacere perchè deve fare
i conti sia con gli strumenti di misura che con la natura discreta della materia e
dell’energia.
In conclusione: considerare un campo “uniforme” significa considerare una regione
di spazio Ω entro la quale le grandezze associate agli elementi spaziali mantengano lo
stesso valore relativamente ad una convenuta tolleranza.
7.4. EQUAZIONE FONDAMENTALE
7.4
7.4.1
121
Equazione fondamentale
Il problema fondamentale del campo
Il problema fondamentale dei campi è il seguente:
assegnata la regione in cui ha sede il campo;
assegnata la natura dei materiali che si trovano nella regione;
assegnate le sorgenti del campo;
assegnate le condizioni sul bordo del campo;
determinare la configurazione del campo.
Per sostanziare questa presentazione esaminiamo i problemi fondamentali dei
principali campi della fisica.
campo elettrico: assegnata una regione di spazio; precisata la natura dei materiali
che vi si trovano (dielettrico, metallo, vuoto, ecc.); assegnata la distribuzione
delle cariche elettriche nella regione; precisate le condizioni al contorno della
regione (pareti metalliche, dielettriche, vuoto, ecc.); determinare il potenziale
elettrico in ogni punto della regione.
campo termico: assegnata una regione di spazio; precisata la natura dei materiali
che vi si trovano; assegnata la distribuzione delle sorgenti di calore nella regione;
precisate le condizioni al contorno della regione (isolanti, conduttori, fluidi,
vuoto, ecc.); determinare la temperatura in ogni punto della regione.
campo degli spostamenti: considerato un corpo solido deformabile; precisata la
natura del materiale (elastico, plastico, viscoelastico, ecc.); precisato se si tratta
di un problema di statica o di dinamica; assegnata la distribuzione delle forze
sul corpo e quelle agenti sul contorno; precisate le condizioni al contorno del
corpo (appoggio, incastro, bordo libero, ecc.); determinare in ogni istante lo
spostamento in ogni punto del continuo.
campo fluido: assegnata una regione di spazio; precisata la natura del fluido (perfetto o viscoso; incomprimibile o comprimibile, ecc.); precisato il tipo di moto
(stazionario o non stazionario, laminare o turbolento, irrotazionale o rotazionale, ecc.); precisata la distribuzione delle forze agenti nella regione e quelle agenti
sul contorno; precisate le condizioni al contorno della regione (impermeabile, a
frontiera libera, ecc.); determinare in ogni punto e ad ogni istante la velocità,
la pressione ed eventualmente la temperatura del fluido.
campo elettromagnetico: assegnata una regione di spazio; precisata la natura dei
materiali che vi si trovano; assegnata la distribuzione delle cariche delle correnti elettriche nella regione; precisate le condizioni al contorno della regione
122
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
(pareti metalliche, dielettriche, vuoto, ecc.); determinare il potenziale elettrico
e magnetico in ogni punto della regione.
campo gravitazionale: assegnata una regione di spazio; data la distribuzione delle
masse nella regione; precisate le condizioni al contorno della regione; determinare il potenziale gravitazionale in ogni punto della regione. E’ questo un
problema che s’incontra in geodesia.
7.4.2
L’equazione fondamentale
Questo problema è tipico di tutta la scienza: assegnate le cause, determinare gli
effetti. Per risolvere il problema fondamentale, occorre mettere in relazione la causa
(sorgente) e l’effetto (potenziale). La relazione è espressa da una equazione chiamata
equazioni fondamentale. Si veda lo schema di figura (7.5).
effetti
Φ potenziali
del campo
incogniti
?
problema
fondamentale
equazione
fondamentale
cause
!
S sorgenti
del campo
note
Figura 7.5:
L’equazione fondamentale di un campo esprime il legame tra la
sorgente del campo ed il suo potenziale.
Le equazioni di campo portano solitamente il nome di coloro che le hanno scoperte,
come mostra la tavola (VII).
A titolo esemplificativo abbiamo raccolto nella tavola (VIII) le più comuni equazioni di campo scritte in forma di equazioni differenziali. Osserviamo che alcune
equazioni, ad es. l’equazione di Poisson, appaiono in diversi campi fisici.
Indichiamo genericamente con σ la grandezza che descrive la sorgente del campo,
sia essa uno scalare, un vettore o un insieme di scalari e vettori. Indichiamo in
corripondenza con ϕ la variabile (scalare, vettore o insieme dei due) che descrive la
configurazione del campo.
La variabile di sorgente σ è legata al potenziale ϕ da una equazione: dal momento
che essa lega le due variabili fondamentali, descriventi la causa e l’effetto, a tale
equazione si dà il nome di equazione fondamentale. Essa è esprimibile nella forma
generale
N (ϕ) = σ
(7.26)
ove con N intendiamo un “operatore”, sia esso differenziale, integrale, algebrico, ecc.
7.4. EQUAZIONE FONDAMENTALE
123
Tavola VII: Le equazioni fondamentali dei campi fisici portano il nome
dei loro scopritori.
campo
termico
elettromagnetico
diffusione
fluidodinamico (per fluidi perfetti)
fluidodinamico (per fluidi viscosi)
acustico (in un fluido o in un solido)
gravitazionale (classico)
gravitazionale (relativistico)
ampiezza di probabilità (meccanica quantistica)
dell’elettrone (meccanica quantistica relativistica)
equazione di
Fourier
Maxwell
Fick
Eulero
Navier-Stokes
D’Alembert
Poisson
Einstein
Schrödinger
Dirac
Meccanica della particella. . L’equazione fondamentale della meccanica della particella è
m
d2
~r(t) = f~(t).
dt2
(7.27)
Essa è una equazione lineare e le due variabili, quella di sorgente (f~) e quella di configurazione (~r) sono entrambi vettori. A velocità relativistiche l’equazione diventa nonlineare:
d ~r(t)
dt
d
~
m0 s
µ
¶ = f (t).
dt
dr(t) 2
1−
dt
(7.28)
Elettrostatica. Nel campo elettrostatico indichiamo con (ρ) la variabile di sorgente e
con (V ) il potenziale. L’equazione fondamentale è quella di Poisson
−ε0 ∆V (P) = ρ(P)
(7.29)
essendo ρ(P) la densità di carica e V (P) il potenziale elettrico. Entrambi sono grandezze
scalari funzioni del posto.
7.4.3
Sorgente impressa e indotta
La sorgente del fenomeno può essere impressa ovvero può agire indipendentemente
dalla configurazione del sistema o indotta ovvero dipendere dalla configurazione del
sistema. Scriveremo quindi l’equazione fondamentale nella forma
N (ϕ) = σ imp + σ ind (ϕ).
(7.30)
124
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
Esempio. Nel moto armonico forzato e smorzato agiscono tre forze
f~ imp (t)
d ~r(t)
f~ visc = −h
dt
f~ el = −k ~r(t)
(7.31)
per cui l’equazione fondamentale è
m
d2 ~r(t)
d ~r(t)
= f~ imp (t) − k ~r(t) − h
.
2
dt
dt
(7.32)
Se la resistenza invece di essere viscosa è aerodinamica si ha
1
f~ aerod = − ρ Cx s
2
µ
d ~r(t)
dt
¶2
(7.33)
che non è lineare.
Ricordiamo che un operatore N si dice lineare, e allora lo indicheremo con L, se
soddisfa le due condizioni (λ è un generico numero reale)
L(λϕ) = λL(ϕ)
proprietà omogenea
L(ϕ + ϕ ) = L(ϕ ) + L(ϕ )
1
2
1
2
proprietà addittiva
(7.34)
che si possono riassumere nella unica forma
L(λϕ1 + µϕ2 ) = λL(ϕ1 ) + µL(ϕ2 ).
(7.35)
Ebbene vi sono diversi fenomeni fisici in cui l’operatore N nella equazione (7.30) è
lineare. Chiameremo queste equazioni intrinsecamente lineari. Al contrario vi sono
diversi casi in cui la sorgente indotta, cioè quella dipendente dalla configurazione del
sistema o del campo, sono funzioni nonlineari del potenziale.
Esempi. L’equazione di moto di un corpo rigido con un asse fisso è
Iz ϕ̈(t) = Mz (t)
(7.36)
ed è intrinsecamente lineare. Qundo però si studiano le grandi oscillazioni pendolari si
perviene all’equazione
I ϕ̈(t) = −mgL sin (ϕ(t))
(7.37)
ma ha una sorgente indotta (dipendente dalla configurazione) che è nonlineare.
Le equazioni della fluidodinamica sono, invece, intrinsecamente nonlineari . Indicata
con f~ la forza di volume, con p la pressione (sorgenti) e con ~v la velocità l’equazione
fondamentale dei fluidi perfetti incomprimibili (equazione di Eulero) è
ρ0
cioé intrinsecamente nonlineare.
∂ ~v
∂ ~v
+ ρ0 k v k = f~ − ∇p.
∂t
∂x
(7.38)
7.4. EQUAZIONE FONDAMENTALE
7.4.4
125
Sovrapposizione degli effetti
In diversi fenomeni fisici si realizza la seguente circostanza: facendo agire contemporaneamente due sorgenti, caratterizzate dalle variabili σ1 ed σ2 , la configurazione
risultante è descritta dalla somma dei rispettivi potenziali ϕ1 e ϕ2 . In simboli
σ1 → ϕ1
λσ1 → λϕ1
σ1 + σ2 → ϕ1 + ϕ2
σ2 → ϕ2
.
(7.39)
Quando questo capita si dice che vale il principio di sovrapposizione degli effetti.
Dimostriamo che quando vale il principio di sovrapposizione degli effetti l’equazione fondamentale è lineare. Infatti essendo
L(ϕ1 ) = σ1
ne viene
L(ϕ2 ) = σ2
L(λϕ1 ) = λσ1
L(ϕ1 + ϕ2 ) = σ1 + σ2 .
(7.40)
(7.41)
Viceversa la linearità dell’operatore comporta la validità del principio di sovrapposizione degli effetti.
Quando l’equazione fondamentale è lineare allora l’applicazione contemporanea di
due sorgenti ha come effetto la somma dei due effetti prodotti separatamente dalle due
sorgenti. Quindi per equazioni lineari vale il principio di sovrapposizione degli effetti.
Esempi. L’elettromagnetismo è intrinsecamente lineare e quindi, in assenza di sorgenti
indotte, vale il principio di sovrapposizione degli effetti. Considerando lo spostamento di
cariche e correnti, ove questo può avvenire, in funzione del campo da loro stesse creato,
le sorgenti indotte dipendono in modo generalmente nonlineare dal potenziale e quindi, a
causa di questo, non si può applicare il principio di sovrapposizione degli effetti.
La linearità intrinseca dell’elettromagnetismo si manifesta, ad esempio, nel fatto che
due onde elettromagnetiche (ad esempio due raggi luminosi) che si intersecano nel vuoto
proseguono il loro cammino senza alterazione. La non linearità indotta si manifesta in
presenza di certi materiali e dà luogo, ad esempio, alla ottica nonlineare [Bloembergen].
La meccanica dei solidi deformabili è, al contrario, intrinsecamente nonlineare. E’ sufficiente fare l’esperimento seguente: una lama metallica incastrata ad un estremo è soggetta
ad una forza (la “sorgente” σ) nell’estremo libero. Raddoppiando la forza non raddoppia
lo spostamento (il “potenziale” ϕ). La proporzionalità ha luogo solo in modo approssimato
se ci limitiamo a piccole forze che producono piccoli spostamenti.
Ecco la ragione per la quale nella scienza delle costruzioni ci si limita, generalmente,
alle piccole deformazioni.
126
CAPITOLO 7. ANALISI DELLE EQUAZIONI FISICHE
Tavola VIII: Un campionario di equazioni della fisica: accanto al nome
abbiamo posto una data indicativa [DA COMPLETARE].
Equazione di Newton (1687 ?)
dinamica particella
m
1
∂tt V(t, ~r) − ∆V(t, ~r) = 0
c2
Equazione di d’Alembert (17...)
acustica nei fluidi
Equazione di Poisson (1812 ?)
il prezzemolo della fisica
Equazione di Fourier (1822)
conduzione termica
d2
~r(t) = f~(t)
dt2
−²∆V(t, ~r) = ρ(t, ~r)
ρ cv ∂t T (t, ~r) − K ∆T (t, ~r) = σ(t, ~r)
Equazioni di Navier-Stokes (1822): fluidodinamica
(
"
#
)
h
i
∂~v (t, ~r)
v 2 (t, ~r)
ρ(t, ~r)
+ ∇×~v (t, ~r) ×~v (t, ~r)
+∇
∂t
2
h
i
−(λ + µ)∇ ∇ · ~v (t, ~r) − µ∆~v (t, ~r) = f~vol (t, ~r)
∂ρ(t, ~r)
+ ∇ · (ρ(t, ~r) ~v (t, ~r)) = 0
∂t
Equazione di Navier (1827) : elastodinamica
h
i
ρ∂tt ~η (t, ~r) − µ ∇2 ~η (t, ~r) + (λ + µ) ∇(∇ · ~η (t, ~r)) = f~(t, ~r)
Equazioni di Maxwell (1865): elettromagnetismo
~ ~r) = 0
∇ · B(t,
~ ~r) = ρ(t, ~r)
∇ · D(t,
~ ~r) = 0
~ ~r) + ∂t B(t,
∇× E(t,
Equazione di Helmholtz (187...)
acustica, onde elettrom.
~ ~r) = ~j(t, ~r)
~ ~r) − ∂t D(t,
∇× H(t,
∆ψ(~r) + k 2 ψ(~r) = 0
Equazioni di Einstein (1916): gravitazione relativistica
1
Rµν (gαβ , ∂γ gαβ , ∂γδ gαβ ) − R (gαβ , ∂γ gαβ , ∂γδ gαβ ) = −χTµν (gαβ )
2
Equazione di Schrödinger (1926): meccanica quantistica
1
2m
Ã
h
2π
!2
Ã
!
h
∆Ψ (t, ~r) + i
∂t Ψ (t, ~r) = eU Ψ (t, ~r)
2π
Capitolo 8
Tavole riassuntive
Introduciamo le notazioni
def
∆t f = f (tn ) − f (tn−1 ) differenza all’indietro
˜ t g def
∆
= g(t̃n+1 ) − g(t̃n )
127
differenza in avanti
(8.1)
128
CAPITOLO 8. TAVOLE RIASSUNTIVE
Tavola I: Formulazione differenziale dell’elettrostatica.
variabili di configurazione
complesso primale: orientazione interna
intervalli primali
variabili di sorgente
complesso duale: orientazione esterna
istanti duali
1TP
V
ρ
Campo elettrico
formulazione differenziale
?3TL
~
E
ĨS̃
3
- ~
D
6
law
~ = ²E
~
D
~ = ~k
∇× E
~
∇× T~ = D
?3TS
~k
6
T~ = −∇η
∇ · ~k = λ
?1TV
η
λ
V potenziale elettrico
~ intensità del campo elettrico
E
~k densità di corrente magnetica
τ
senza nome
3
ĨL̃
T~
dia electrost diff.tex
6
~ =ρ
∇·D
~ = −∇V
E
1
ĨṼ
1
ĨP̃
ρ densità elettrica
~ induzione elettrica
D
T~ senza nome
η
senza nome
129
Tavola II: Diagram connecting the global variables of electrostatics. The
variables in the same column have the same dimensions and also the same
units.
configuration variables
primal complex: inner orientation
SI units: weber
TP
Vh
Eα = −
h gαh Vh
Eα
P
α cβα
law
Ψα = ²
β
P ˜
c
α dhα Ψα = Qh
S̃
Ĩ
- Ψα
6
P
Eα
β c̃αβ
τβ = Ψ α
? TS
6
τβ
dkβ Kβ = Λk
τβ =
? TV
Ĩ
L̃
k g̃βk
ηk
electric potential impulse
electric tension impulse
magnetic charge flow
unnamed
P
Λk
Vh
Eα
Kβ
Λk
Ĩ
Ṽ
6
s̃α
Eα
τn l α
Kβ
P
Qch
Electric Field
discrete formulation
P
? TL
Kβ =
source variables
dual complex : outer orientation
SI units: coulomb
ηk
Ĩ
P̃
Qch
Ψα
τβ
ηk
electric charge content
electric flux
unnamed
unnamed
130
CAPITOLO 8. TAVOLE RIASSUNTIVE
Tavola III: Formulazione differenziale della magnetostatica.
variabili di configurazione
complesso primale: orientazione interna
istanti primali
χ
variabili di sorgente
complesso duale: orientazione esterna
intervalli duali
1IP
Campo magnetico
formulazione differenziale
~ = −∇χ
A
~
A
6
~ = ∇× A
~
B
~ = J~
∇× H
L̃
3T̃
- ~
H
6
1~
~ law
H
= B
µ
~ =g
∇·B
~ = −∇Vm
H
?1IV
g
χ funzione di gauge
~ potenziale vettore magnetico
A
~ induzione magnetica
B
densità di carica magnetica
1T̃
P̃
Vm
g
3T̃
S̃
J~
~
B
τ
6
∇ · J~ = τ
? 3IL
? 3IS
1T̃
Ṽ
τ
J~
produzione di carica elettrica
densità di corrente elettrica
~ intensità del campo magnetico
H
Vm potenziale scalare magnetico
131
Tavola IV: Formulazione discreta della magnetostatica.
variabili di configurazione
complesso primale : orientazione interna
istanti primali
dimensioni: [M L2 T −2 I −1 ]
unità SI: weber
IP
χh
pα = −
variabili di sorgente
complesso duale : orientazione esterna
intervalli duali
dimensioni: [T I]
unità SI: coulomb
Sh
6
Campo magnetico
formulazione discreta
P
h gαh χh
P ˜
α dhα Iα = Sh
? IL
6
pα
Φβ =
P
α cβα
P
β c̃αβ
pα
Φβ
β
law
Fmβ =
dkβ Φβ = Gk
c?
? IV
?
Gk
T̃
S̃
Iα
? IS
P
T̃
Ṽ
1 ˜lβ
Φβ
µ sβ
s!
6
Fmβ = Iα
L̃
T̃
- Fmβ
6
Fmβ = −
P
k g̃βk
Vmk
T̃
P̃
Vmk
-
χh
funzione di gauge
Sh
prod. carica/tempo
pα
momento elettrocinetico
Iαf
corrente elettrica
Φβ flusso magnetico
Fmβ tensione magnetica
Gk carica magnetica
Vmk
potenziale magnetico
132
CAPITOLO 8. TAVOLE RIASSUNTIVE
Tavola V: The differential structure of electromagnetism
configuration variables
primal complex: inner orientation
intervals
instants
source variables
dual complex : outer orientation
instants
intervals
1IP
T̃Ṽ
1
χ
p
6
Electromagnetism
differential formulation
~ = −∇χ
V = ∂t χ A
∂t ρ + ∇ · J~ = 0
1TP
ĨṼ
1
ρ
V
6
? 3IL
~
A
Ohm’s law
? 3IS
~
B
~ =0
~ + ∂t B
∇×E
~ =0
∇·B
?3TS
~ = 1B
~
H
µ
J~ :
6
~ = σE
~ J
?3TL
~ ~ = ²E
~
E
D
~ = −∂t A
~ − ∇V
E
~ = ∇×A
~
B
~ =ρ
∇·D
~ − ∂t D
~ = J~
∇×H
-
ĨS̃
3
~
D
6
~ = ∇×T~
D
~ = −∇Vm + ∂t T~
H
T~
?1IV
6
g
Vm = −∂t η
T~ = −∇η
−∂t g + ∇ · ~k = λ
T̃P̃
1
Vm
λ
T̃L̃
3
- ~
H
6
ĨL̃
3
~k
?1TV
T̃S̃
3
ĨP̃
1
η
133
Tavola VI: La struttura differenziale dell’elettromagnetismo
variabili di configurazione
complesso primale: orientazione interna
intervalli
istanti
IP
χh
P
h gαh χh
TP
Vh
τh
Elettromagnetismo
formulazione discreta
Vh = ∆t χh
pα = −
variabili di sorgente
complesso duale: orientazione esterna
istanti
intervalli
6
P ˜
f
˜ c
α dhα Qα + ∆t Qh = 0
Qc
h
T̃Ṽ
ĨṼ
6
? IL
T̃S̃
f
1
Q
α 6
legge di Ohm
P
P
c
˜
Eα = − h gαh Vh − ∆t pα
α dhα Ψα = Qh
f law s̃α τ̃n
Q
=
σ
E
α
P
P
α
f
˜
l α τn
Φβ = α cβα pα β c̃αβ Fmβ − ∆t Ψα = Q̃α
ĨS̃
TL
?
s̃α
law
Ψ̃α = ²
Eα
V
Ψ
α α l α τn
6
T̃L̃
? IS
˜
law 1 lβ τ̃n
- Fmβ
Φβ
Fmβ =
Φβ
µ sβ
6
P
P
Ψα = β c̃αβ Tβ
β cβα Eα + ∆t Φβ = 0
P
P
˜
pα
β
Fmβ = −
dqβ Φβ = 0
? TS
Gf
k
?
Gck
∆t Gck −
6
Vmk
˜ t ηk
Vmk = ∆
P
p
f
β dhβ Gk = Gk
T =
P
? TV
ĨP̃
Gp
k
dia elettrom disc.tex
+ ∆t Tβ
ĨL̃
Tβ
IV
k g̃βk ηk
ηk
k g̃βk ηk
T̃P̃
134
CAPITOLO 8. TAVOLE RIASSUNTIVE
Tavola VII: Formulazione spazio-temporale del campo elettromagnetico.
Campo elettromagnetico
formulazione relativistica
1P χ
Z
hχ, τ i =
χτ dH
τ
H
6
∂µ J µ = τ
Aα = ∂α χ
4L ?
hA, Ji =
Aα
Z
H
Fαβ = ∂α Aβ − ∂β Aα
6S ?
hF, Gi =
Fαβ
G
Z
Aα J α dH
6
∂ν Gµν = J µ
1
Fαβ Gαβ dH
2
H
S̃
6
- Gµν
6
1
= χµναβ Fαβ
2
Gµν = ερσµν ∂ρ Tσ
hk, T i =
kµ
Z
k σ Tσ dH
H
Tσ
Tσ = ∂σ η
hλ, Vm i =
λ
Z
λη dH
η
H
H = hypervolume
³
´
J α = cρ, J~
k = c g, ~k
Vm ~
Tα =
, −T
c
³
´
µ
1
P̃
dH =µdV dt ¶
V
~
Aα =
, −A
c
α
4
L̃
6
∂µ k µ = λ
1H ?
4
Ṽ
Jµ
µν law
1 γαβµ
∂γ Fαβ = k µ
ε
2
4V ?
1
H̃
¶
135
Tavola VIII: Elenco delle principali variabili globali con l’ente spaziale e
temporale al quale sono associate.
funzione iconale
funzione di gauge
spostamento iniziale
funzione di Jacobi
funzione di fase (di un’onda)
potenziale delle velocità
spostamento
impulso del potenziale gravitaz.
impulso del momento elettrocin.
differenza di fase (nel tempo)
impulso di temperatura
circolazione magnetica
numero d’onde
cammino ottico
differenza di fase (nello spazio)
spostamento relativo
circolazione della velocità
impulso di tensione elettrica
impulso di tensione magnetica
impulso di tensione termodin.
flusso elettrico
flusso magnetico
flusso dei vortici
flusso di massa
flusso di energia (lavoro, calore)
flusso di quantità di moto
flusso di carica elettrica
flusso di particelle
flusso di entropia
flusso di probabilità
flusso di momento angolare
contenuto di massa
contenuto di energia
contenuto di di carica
contenuto di entropia
contenuto di quantità di moto
contenuto di particelle
contenuto di probabilità
contenuto di momento angol.
produzione di energia
produzione di entropia
produzione di massa
produzione di particelle
impulso di volume
in un punto
in un punto
di un punto
in un punto
in un punto
in un punto
di un punto
in un punto
in un punto
in un punto
in un punto
lungo una linea
lungo una linea
lungo una linea
lungo una linea
lungo una linea
lungo una linea
lungo una linea
lungo una linea
lungo una linea
su una superficie
su una superficie
su una superficie
attraverso una superficie
attraverso una superficie
attraverso una superficie
attraverso una superficie
attraverso una superficie
attraverso una superficie
attraverso una superficie
attraverso una superficie
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
in a volume
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
in un intervallo
in un intervallo
in un intervallo
in un intervallo
in un intervallo
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
in un intervallo
in un intervallo
in un intervallo
ad un istante
ad un istante
ad un istante
in un intervallo
in un intervallo
in un intervallo
in un intervallo
in un intervallo
in un intervallo
in un intervallo
in un intervallo
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
ad un istante
in un intervallo
in un intervallo
in un intervallo
in un intervallo
in un intervallo
136
CAPITOLO 8. TAVOLE RIASSUNTIVE
Capitolo 9
Risoluzione numerica
Questo capitolo della dispensa raccoglie materiale informe. L’autore ha pensato
di mettere ugualmente questi pezzi affinché i dottorandi possano essere facilitati
nella impostazione numerica della formulazione finita che abbiamo presentato.
Il metodo numerico che si sviluppa dalla formulazione finita ha preso il nome
di metodo delle celle.
La formulazione finita dell’elettromagnetismo si presta in modo immediato alla
formulazione numerica. Per impostare e risolvere i problemi elettromagnetici è sufficiente scegliere un complesso di celle nello spazio ed uno nel tempo ed applicare
ad essi la formulazione finita rispettando rigorosamente l’associazione delle grandezze
globali ai rispettivi elementi spaziali e temporali.
Il complesso primale può essere di due tipi:1
• formato di celle rettangolari in 2D e a forma di parallelepipedi rettangoli in 3D;
• formato da triangoli in 2D e da tetraedri in 3D (complessi simpliciali).
Esaminiamo separatamente i due casi.
9.1
Rettangoli ed esaedri
Data la regione di lavoro entro la quale vogliamo determinare il campo elettromagnetico si suddivide in rettangoli se si tratta di una regione piana (2D) e in esaedri se si
tratta di una regione spaziale (3D). Si veda la figura (5.6b) a pagina (5.6). Questa
suddivisione assomiglia a quella in uso per il metodo delle differenze finite ma ne differisce per il fatto che in tale metodo (Finite Difference Method = FDM) interessano
solo i nodi.
1
In linea di principio il complesso primale può anche essere formato da poligoni o poliedri generici,
ma non si vede il vantaggio che questo comporti.
137
138
CAPITOLO 9. RISOLUZIONE NUMERICA
Nel metodo delle differenze finite si costruisce un reticolo regolare di punti più che
di una suddivisione in celle. Infatti gli spigolo, le facce e le celle stesse non hanno
nessun ruolo. Al contrario nel metodo delle celle i vertici (nodi), gli spigoli, le facce e
le celle hanno un ruolo essenziale in quanto è ad esse che vanno associate le variabili
globali.
Se la regione di lavoro ha una forma arbitraria la suddivisione in celle a forma
di rettangoli o di esaedri porta ad avere sul bordo della regione delle celle spezzate.
Questo rende farraginosa la imposizione delle condizioni di bordo in quanto costringe
ad adattare ai vertici ai lati e alle facce le condizioni date sul bordo. Questo si fa a
base di interpolazioni non scevre di inconvenienti oltre che di arbitri. Questo difetto
non c’è se si usa una suddivisione in simplessi, come vedremo nella sezione successiva.
Un secondo inconveniente si ha quando si voglia fare una suddivisione più fitta
in alcune parti della regione, la dove i gradienti variano più rapidamente. In questo
caso l’obbligo di seguire le coordinate cartesiane impone che l’infittimento debba
prolungarsi anche al di fuori della zona in cui interessa aumentando cosı̀ notevolmente
il numero di celle, soprattutto in 3D.
Per quanto riguarda il complesso duale il modo più spontaneo è quello di considerare i centri di ogni rettangolo o esaedro e di considerare tali centri come vertici
del secondo complesso. Si badi che questa suddisione baricentrica non è obbligatoria
potendosi individuare con altri criterii i vertici del complesso duale.
9.2
Triangoli e tetraedri
La divisione in simplessi è di gran lunga da preferire nella costruzione di un complesso
di celle. Questa si può ottenere mediante generatori di mesh sia in 2D che in 3D. Ne
esistono diversi sia gratuiti che a pagamento. Per il 2D noi ne usiamo uno gratuito
che si chiama Easymesh e che si può prelevare dal sito indicato nella nota di pagina
(64).
Riguardo la formazione del complesso duale si hanno diverse possibilità. Intanto
osserviamo che le celle duali possono concepirsi come regioni di influenza dei vertici
(nodi) ovvero come dominii di influenza, paragonabili ai terreni che circondavano ogni
castello dei signorotti dell’epoca. 2
Scegliere quindi un complesso duale equivale a fissare, con un qualche criterio,
le regioni di influenza dei nodi del complesso primale. In un triangolo si possono
intravedere due scelte molto spontanee: l’una è quella dei centri delle circonferenze
circoscritte a ciascun triangolo l’altra è quella dei baricentri dei triangoli. A priori si
potrebbero prendere anche i centri dei cerchi inscritti (incentri) o l’intersezione delle
2
Si noti che il nome “dominio” usato in matematica trae origine dal dominio del “dominus” dei
tempi passati (domus = casa).
9.3. IL PROBLEMA DA RISOLVERE
139
altezze (ortocentri) o altri punti usando altri criteri. Uno dei requisiti naturali è che
i “centri” siano interni al triangolo.
Le scelte più comuni sono quelle dei circocentri e dei baricentri in 2D e degli
sferocentri e dei baricentri in 3D.
9.3
Il problema da risolvere
Il problema fondamentale del campo elettromagnetico può enunciarsi nel modo seguente:
• Data una regione di spazio contenente, a priori, diversi mezzi materiali;
• assegnate le cariche elettriche in quiete o in moto nell’interno della regione, cioé
le sorgenti del campo presenti nella regione;
• assegnate le condizioni al bordo della regione che riassumono gli effetti delle
sorgenti che si trovano all’esterno della regione;
• assegnata la natura dei materiali che si trovano nella regione;
• determinare il campo elettromagnetico nella regione.
Nella formulazione differenziale classica si assumono come grandezze incognite i due
~ e H
~ in ogni punto della regione. In altri casi si assumono il potenziale
vettori E
~
elettrico V ed il vettore potenziale magnetico A.
Nella formulazione finita che abbiamo presentato si possono assumere come incognite le corrispondenti grandezze globali:
1. tensione elettrica U e quella magnetica Um ;
2. l’impulso di potenziale elettrico V ed il momento elettrocinetico p
3. il flusso magnetico Φ e quello elettrico Ψ
1) Se si assumono come incognite le tensioni elettriche e magnetiche si devono
determinare:
a) le tensioni elettriche Uα associate agli spigoli delle celle primali lα
b) le tensioni magnetiche Umβ associate agli spigoli delle celle duali l̃β .
2) Se si assumono come incognite l’impulso di potenziale (o il potenziale) e il
momento elettrocinetico si devono determinare:
a) gli impulsi di potenziale Vh associati ai vertici delle celle primali ph
b) i momenti elettrocinetici pα associati agli spigoli delle celle primali lα .
3) Se infine si assumono come incogniti i flussi allora si devono determinare
140
CAPITOLO 9. RISOLUZIONE NUMERICA
a) i flussi magnetici Φβ associati alle facce delle celle primali sβ
b) i flussi elettrici Ψα associati alle facce delle celle duali s̃α .
Una volta determinate e tensioni o i flussi si può risalire ai vettori nell’interno
delle singole celle mediante le relazioni spiegate nel seguito del presente capitolo. La
tavola (I) è da vedere insieme alla tavola (6.1) di pagina 100.
9.3. IL PROBLEMA DA RISOLVERE
141
Tavola I: Schema del procedimento computazionale.
In questo schema per semplicità F = Fm ; tn → n; t̃n → n − 1/2
condizioni iniziali: n = 0
Ψα−1/2 = 0
1
Fβ0 = 0
X
Ψ αn+1/2 = Ψ αn−1/2 +
(Ii )0α 6= 0
(Ic )0α = 0
(Qf )0α ≈ τ̃0 (Ii ) 0α
c̃αβ Fβn − (Qf )nα
β
?
2
Eαn+1/2
1 lα n+1/2
≈
Ψ
² s̃α α
(lα ⊥ s̃α )
?
?
3
E αn+1/2 ≈ τn+1 E αn+1/2
4
Φ n+1
β
=
Φ nβ
−
X
(II ord)
i
1 h n+1/2
≈
Eα
+ Eαn−1/2 (II ord)
2
7
n
Eα
8
(Ic ) nα
?
?
cβα Eαn+1/2
β
s̃α n
≈σ
E
lα α
?
5
Fβn+1
1 ˜lβ n+1
≈
Φ
µ sβ β
? (
(˜lβ ⊥ sβ )
9
I αn = (Ii ) nα + (Ic ) nα
?
6
F βn+1 ≈ τ̃n+1 F βn+1
10
(II ord)
E 7
3 E E (Qf )nα = τ̃n I αn
(II ord)
variabili di sorgente
8
costitutiva
Ohm
2
costitutiva
elettrica
4
?
Φ i = impres.
c =conduz.
?
variabili di configurazione
Faraday
Neumann
(lα ⊥ s̃α )
10
- Ic
- Qf ⇐
1
⇐
Ψ 6
1
5
costitutiva
magnetica
Ampère
Maxwell
6
- F
- F ⇐
142
CAPITOLO 9. RISOLUZIONE NUMERICA
9.4
Equazione di Poisson in forma finita
In elettrostatica la variabile di configurazione più opportuna è certamente il potenziale elettrico V . Dal momento che i potenziali elettrici sono associati ai vertici del
complesso primale si possono considerare come incogniti gli N0 potenziali
(9.1)
V1 , V1 , ...VN0 .
To show how simple one can make a finite formulation of electrostatics let us
consider a plane electrostatic field with either localized or distributed charges. Let
us construct in the region a Delaunay-Voronoi triangulation as shown in Fig.(9.1 b).
The equations are
X
d˜hα Ψα = Qch
α
X
def
→
cβα Uα = 0
Uα = −
X
α
(9.2)
gαk Vk .
k
With reference to Fig.(9.1) let us suppose that on two sides the potential is given
while on the other two sides the electric flux is given. Let us denote by V1 , V2 , V3 , V4
the unknown potentials and by V5 , V6 , V7 , V8 , V9 those assigned. Let Ψ1 , Ψ2 , Ψ3 be the
electric flux across the broken cells 1, 2, 3. The four balance equations are
Ψ
Ψ2
V3
V2
flu
x
as
sig
Ω
potential assigned
potential assigned
ne
d
flux assigned
Ψ1
V9
V8
V1
V5
Ψ9
V4
V7
V6
Figura 9.1: How to deal with boundary conditions in electrostatics.
X
d˜hα Ψα = Qch + Ψh
α
for h=1, 2, 3 and
X
d˜4α Ψα = Qc4
(9.3)
α
where
s̃α
Uα
with
Uα = Vh − Vk .
(9.4)
lα
The four unknowns Vk are determined by the four balance equations. We want to
remark that the flux assigned is easily introduced in the balance equations of the
Ψα = ²
9.4. EQUAZIONE DI POISSON IN FORMA FINITA
143
Tavola II: Finite formulation for electrostatics
configuration variables
primal complex: inner orientation
intervals
SI units: volt
X
TP
Vk
def
Uα = −
X
source variables
dual complex : outer orientation
instants
SI units: coulomb
Poisson
Lhk Vk = Qch
k
Qch
X
gαk Vk
? TL
X
Ψα = ²
cβα Uα = 0
def
Lhk = ²
α
X
gαh
α
0
s̃α
gαk
lα
gγ j = +1
i
gβi = −1
s̃β
gβj = +1
j
h
gγ h = −1
d˜hγ = +1
Ĩ
L̃
Delaunay prism
s̃α
lγ
g α i = +1
lα
lβ
s̃γ
Voronoi prism
d˜hα Ψα = Qch
S̃
Ĩ
- Ψα
6
s̃α
Uα
lα
? TS
6
α
k
Uα
ĨṼ
gαh = −1
d˜hα = +1
144
CAPITOLO 9. RISOLUZIONE NUMERICA
broken polygons: this must be compared with the Neumann conditions that, on the
contrary, convert the flow into the corresponding normal derivative of the potential
in order to be considered as boundary conditions for the Poisson equation.
The discrete variables Vh , Uα , Ψα , Qch and their relations are outlined in Table (II).
Poisson’s equation. Once the material equation is given the relation which solves
the fundamental problem is
X
"
d˜hα
α
Ã
X
s̃α
²
−
gαk Vk
lα
k
!#
with s̃α ⊥ lα .
= Qch
(9.5)
Equation (9.5) is the finite version of Poisson’s equation. From the property d˜hα =
−gαh it follows
X
k
Lhk Vk = Qch
where
def
Lhk = ²
X
gαh
α
s̃α
gαk .
lα
(9.6)
L = ||Lhk || is the capacity matrix that is symmetric. This is the algebraic property
corresponding to the self-adjointness of the Laplacian operator. The self-adjointness
property, which allows variational formulation, is an immediate consequence of an
algebraic property and does not require any integration by parts.
9.4.1
Ricavo di E dai potenziali nei vertici
~ nell’interno di ogni simplesso in termini dei
Mostriamo come ricavare il vettore E
potenziali nodali.
Faremo l’approssimazione di ritenere che nell’interno di ogni simplesso il potenziale
sia una funzione affine3 delle coordinate cartesiane ovvero:
V (x, y, z) = a + Ex x + Ey y + Ez z.
(9.7)
Vogliamo allora ricavare le componenti Ex , Ey , Ez in termini dei potenziali nei vertici.Indichiamo con h, i, j, k i quattro vertici di una cella vc ordinati in modo da formare
una vite destra.
3
Il termine “affine” suona strano ma è più preciso del termine “lineare” comunemente usato. Si
ricordi che una funzione lineare deve annullarsi quando la variabile indipendente si annulla, cosa che
non fa una funzione del tipo (9.7) a causa del termine a. Al più si può dire che la funzione (9.7) ha
un andamento lineare.
9.4. EQUAZIONE DI POISSON IN FORMA FINITA
145
~ i, L
~ j, L
~ k i tre vettori che descrivono i
Intermezzo geometrico. Se indichiamo con L
lati orientati che escono dal vertice h come mostra la figura (9.2) possiamo scrivere
Lix Liy Liz
Ex
E
Ljx Ljy Ljz
y
Lkx Lky Lkz c Ez
Vi − Vh
=
c
V −V
j
h
V −V
k
h
c
~i =
La faccia Ai , opposta al vertice iè descritta dal vettore A
~k× L
~ j . Con riferimento
L
1
2
k
y
~
A
i
j
Li
h
Ve
e
Lh
j
~
L
β
Lj
x
h
i
β
γ
Akx A
ix
Ajx
~α i
L
~γ
L
~
A
j
x
Lhx
Ljx
γ
α
k
i
i
~
A
h
j
~
A
k
A
Lhγ y
Ljγy
(9.8)
.
j
Figura 9.2: La proiezione di un tetraedro sulle tre superfici coordinate.
alla figura (9.2) si ottiene
~i =
A
1
2
~k× L
~j =
L
1
2
¯
¯ ~i
¯
¯
¯ Lkx
¯
¯ Ljx
¯
¯
¯
¯
¯
¯
¯
~k
~j
Lky Lkz
Ljy Ljz
(9.9)
da cui
Aix =
1
2
¯
¯ L
¯ ky
¯
¯ Ljy
Lkz
Ljz
¯
¯
¯
¯
¯
Aiy =
− 12
¯
¯ L
¯ kx
¯
¯ Ljx
Lkz
Ljz
¯
¯
¯
¯
¯
Aiz =
¯
¯ L
¯ kx
¯
¯ Ljx
1
2
Lky
Ljy
¯
¯
¯
¯.
¯
(9.10)
~j , A
~k, A
~ h . La faccia Aj opposta al vertice j è descritta
Analoga relazione si può ottenere per A
~j = 1 L
~
~
dal vettore A
2 i × Lk .
Con riferimento alla figura (9.2) si ha
~j =
A
1
2
~ i× L
~k =
L
1
2
¯
¯ ~i
¯
¯
¯ Lix
¯
¯ Lkx
~k
~j
Liy Liz
Lky Lkz
¯
¯
¯
¯
¯
¯
¯
(9.11)
per cui
Ajx =
1
2
¯
¯ L
¯ iy
¯
¯ Lky
Liz
Lkz
¯
¯
¯
¯
¯
Ajy =
− 12
¯
¯ L
¯ ix
¯
¯ Lkx
Liz
Lkz
¯
¯
¯
¯
¯
Ajz =
1
2
¯
¯ L
¯ ix
¯
¯ Lkx
Liy
Lky
¯
¯
¯
¯
¯
(9.12)
146
CAPITOLO 9. RISOLUZIONE NUMERICA
k
k
~γ
L
j
~
L
β
h
i
~α
L
~γ
L
j
~
L
β
h
i
~α
L
Figura 9.3: Ogni cubo e ogni parallelepippedo si può dividere in sei tetraedri
di uguale volume. Ne viene che il volume di un tetraedro è 1/6 di quello del
parallelepippedo che lo contiene.
~k =
La faccia Ak opposta al vertice k è descritta dal vettore area A
Con riferimento alla figura (9.2) si ha
~k =
A
per cui
Akx =
1
2
¯
¯ L
¯ jy
¯
¯ Liy
Ljz
Liz
¯
¯
¯
¯
¯
1
2
~i =
~j× L
L
Aky =
− 12
1
2
¯
¯ ~i
¯
¯
¯ Ljx
¯
¯ Lix
¯
¯ L
¯ jx
¯
¯ Lix
¯
¯
¯
¯
¯
~ i.
~j× L
L
¯
¯
¯
¯
¯
¯
¯
~k
~j
Ljy Ljz
Liy Liz
Ljz
Liz
1
2
1
2
Akz =
(9.13)
¯
¯ L
¯ jx
¯
¯ Lix
Ljy
Liy
¯
¯
¯
¯ .
¯
(9.14)
~ i ×L
~ j) · L
~ k , come mostra la figura(9.3)
Il volume orientato del tetraedro è vc = 1/6 (L
Usando la regola di Cramer si ottiene
Ex = −
1
[Aix Vi + Ajx Vj + Akx Vk + Ahx Vh ]
3 vc
(9.15)
avendo usato la relazione −(Aix + Ajx + Akx ) = Ahx , come mostra la figura Fig.(9.2).
~ = −∇φ ovvero dati due punti h e k è Vhk = Vk − Vh si ha
Ricordando che E
Ex
A
Aix Ajx Akx
1 hx
Ey
=
Ahy Aiy Ajy Aky
3 vc
E
Ahz Aiz Ajz Akz
z
c
mentre nel bidimensionale si ha
(
9.4.2
Ex
Ey
)
=
c
1
2 ac b
"
Ahx Aix Ajx
Ahy Aiy Ajy
Vh
V
i
V
j
c
Vk
in IR3
(9.16)
c
# V
h
V
i
c Vj
in IR2
(9.17)
c
~ dalle tensioni sui lati
Come ricavare E
In elettrostatica la somma delle tensioni su un circuito è nulla mentre in elettromagnetismo non lo è. Qualora siano state calcolate le tensioni elettriche sui lati del primale può
~ nei simplessi. Distingueremo due casi:
interessare il calcolo del vettore E
9.4. EQUAZIONE DI POISSON IN FORMA FINITA
147
a) la somma tensioni sia nulla. In questo caso si può trovare un campo uniforme
in grado di fornire lungo i lati le tensioni assegnate. Con riferimento alla figura (9.6b))
Ex Lhx + Ey Lhy
E L +E L
x ix
y iy
E L +E L
x jx
y jy
= Vh
= Vi
= Vj
(9.18)
Dal momento che la somma delle tensioni su una circuito è nulla ne viene che la terza
equazione è combinazione lineare delle altre due e pertanto si può scrivere
(
Ex Lhx + Ey Lhy = Vh
Ex Lix + Ey Liy = Vi
(9.19)
Da questa si ricava, come indicato in figura (9.4), Aix = b Liy e Ahx = b Lhy donde
¯
¯ L
¯
∆ = ¯ hx
¯ Lhy
def
Lix
Liy
¯
¯
¯
¯
¯
1
Ex =
2∆
¯
¯ V
¯ h
¯
¯ Lhy
Vi
Liy
¯
¯
¯
¯
¯
(9.20)
e quindi
Ahy
j
~h
A
j b
~
A
h
Li
Ahx
Aiy
~i
A
Lh
L hy
Aix
L iy
h
Ex
Ey
L hx
~
E
i
Lj
h
i
L ix
~j
A
Figura 9.4: Ogni complesso bidimensionale è, in realtà, un complesso di prismi di
spessore b. I vettori area hanno (evidentemente) una scala diversa dai vettori che
descrivono gli spigoli orientati.
Ex
Ey
=
=
1
(Aix Vh − Ahx Vi )
2 b ac
1
(Aiy Vh − Ahy Vi )
2 b ac
(9.21)
148
CAPITOLO 9. RISOLUZIONE NUMERICA
verifica: posto Vh = Vi − Vj e Vi = Vj − Vh si ricava
E
x
=
E
y
=
1
[Aix (Vi − Vj ) − Ahx (Vj − Vh )] =
2 b ac
1
[Aiy (Vi − Vj ) − Ahy (Vj − Vh )] =
2 b ac
1
(Ahx Vh + Aix Vi + Ajx Vj )
2 b ac
1
(Ahy Vh + Aiy Vi + Ajy Vj )
2 b ac
(9.22)
che coincidono con le (9.17).
b) somma tensioni NON nulla. Per interpolare la tensione si tratta di trovare un
campo affine tale che la circolazione del vettore lungo i lati sia uguale alle tensioni. Un
campo affine in due dimensioni ha la struttura generale
(
Ex = a + bx + cy
Ey = e + f x + gy
(9.23)
Un esempio di campo affine è illustrato in figura (9.5) nella quale si visualizza l’andamento
j
j
j
i
i
h
h
i
h
Figura 9.5: Un esempio di campo vettoriale affine.
lineare della componenti del vettore. Questo campo dipende da 3×2 = 6 parametri che si
possono determinare in funzione delle 2×3 = 6 componenti dei tre spostamenti nodali. Dal
momento che noi abbiamo assegnate le tre tensioni lungo i tre lati occorre considerare un
particolare campo affine. Eccone uno
(
Ex = a + 0 x + c y
Ey = e − c x + 0 y
(9.24)
Questo campo dipende da tre parametri. In un campo affine la circolazione di un vettore
lungo un segmento di retta è uguale al prodotto scalare del vettore calcolato nel punto medio
del segmento per il vettore della retta. Quindi, con riferimento alla figura (9.6b dovremo
avere
9.4. EQUAZIONE DI POISSON IN FORMA FINITA
149
j
j
ij
ij
jh
M
N
i
i
hi
jh
hi
P
b)
a)
h
h
~ uniforme che fornisce le tre tensioni assegnate
Figura 9.6: Il calcolo del campo E
sui tre lati. a) caso in cui la somma delle tensioni è nulla: il campo è uniforme; b
caso in cui la somma non è nulla: il campo è affine.
Ex (M ) Lijx + Ey (M ) Lijy
ovvero
= Vij
Ex (N ) Ljhx + Ey (N ) Ljhy = Vjh
Ex (P ) Lhix + Ey (P ) Lhiy
= Vhi
·
µ
¶¸
·
µ
¶¸
y i + yj
xi + xj
a
+
c
L
+
e
−
c
Lij y
ij x
2
2
·
µ
¶¸
·
µ
¶¸
y j + yh
xj + xh
a+c
Ljh x + e − c
(9.25)
= Vij
Ljh y = Vjh
2
2
·
µ
¶¸
·
µ
¶¸
y
+
y
x
+
xi
i
h
h
a
+
c
L
+
e
−
c
Lhi y
hi x
2
2
(9.26)
= Vhi
Raccogliendo si ottiene
·µ
¶
µ
¶
¸
yi + yj
xi + xj
a Lij x + e Lij y + c
Lij x −
Lij y
= Vij
2
2
·µ
¶
µ
¶
¸
yj + y h
xj + xh
a Ljh x + e Ljh y + c
Ljh x −
Ljh y
2
2
·µ
¶
µ
¶
¸
yh + yi
xh + xi
a Lhi x + e Lhi y + c
Lhi x −
Lhi y
2
2
= Vjh
(9.27)
= Vhi
Risolvendo questo sistema si ottengono le tre costanti a, c, e e quindi con la formula (9.24)
~ in ogni punto interno al triangolo. La figura (9.6b)
siamo in grado di interpolare il vettore E
è stata ottenuta usando questa formula mediante il programma Nedelec.m in MATLAB
riportato in fondo a questo testo.
%
Nedelec.m
150
CAPITOLO 9. RISOLUZIONE NUMERICA
% riferimento a "elettromagnetismo.tex"
%
% Si assegna un triangolo e le tensioni sui lati.
% Le tensioni non hanno somma nulla.
% Si cerca un vettore E(x,y) interpolato in modo affine
% le cui circolazioni sui tre lati
% siano uguali alle tensioni preassegnate.
% il campo affine ha la forma:
% Ex(x,y) = a + 0 x + c y
% Ey(x,y) = e - c x + 0 y
clc ; clear all;
% ----------modalita’ grafica-------------close; h1 = figure(2) ;
% set(h1, ’Units’, ’normalized’, ’Position’, [0 0 1 1]) ;
set(h1, ’Units’, ’normalized’, ’Position’, [0.5 0.5 0.5 0.5]) ;
whitebg(’w’);
hold on ; pause on ; axis off ; zoom on
axis equal ;
%
--------------------- Dati ---------------------------% assegna delle coordinate dei vertici
xh = 3; xi = 9; xj = 5;
yh = 2; yi = 5; yj = 8;
% assegna le tensioni sui lati
Vij = 9;
Vjh = 12;
Vhi = 5;
% ------------------------------------------------------% disegna i nodi ed il triangolo
% ------------------------------------------------------f = 0.2; % fattore di scala per i vettori
raggio =0.03;
f_palla(xh,yh, 0.06, ’k’)
text(xh,yh,’ h’,’fontsize’,18)
f_palla(xi,yi, 0.06, ’k’)
text(xi,yi,’ i’,’fontsize’,18)
f_palla(xj,yj, 0.06, ’k’)
text(xj,yj,’ j’,’fontsize’,18)
line([xh xi],[yh yi],’color’,’k’)
line([xi xj],[yi yj],’color’,’k’)
line([xj xh],[yj yh],’color’,’k’)
% ------------------------------------------------------% calcola il campo
% -------------------------------------------------------
9.4. EQUAZIONE DI POISSON IN FORMA FINITA
Lijx = xj-xi; Lijy = yj-yi;
Ljhx = xh-xj; Ljhy = yh-yj;
Lhix = xi-xh; Lhiy = yi-yh;
%
%
%
a*Lijx + e*Lijy + c ( (yi+yj)/2*Lijx - (xi+xj)/2*Lijy ) = Vij
a*Ljhx + e*Ljhy + c ( (yj+yh)/2*Ljhx - (xj+xh)/2*Ljhy ) = Vjh
a*Lhix + e*Lhiy + c ( (yh+yi)/2*Lhix - (xh+xi)/2 Lhiy ) = Vij
A=[ Lijx Lijy ( (yi+yj)/2*Lijx - (xi+xj)/2*Lijy )
Ljhx Ljhy ( (yj+yh)/2*Ljhx - (xj+xh)/2*Ljhy )
Lhix Lhiy ( (yh+yi)/2*Lhix - (xh+xi)/2*Lhiy )];
V=[Vij; Vjh ; Vhi];
X = A \ V; % ATTENZIONE: barra rovescia
a = X(1); e = X(2); c = X(3);
% ------------------------------------------------------% disegna il campo
% ------------------------------------------------------for x=3 : 0.5 : 9
for y=2 : 0.5 : 8
Ex = a + 0*x + c*y;
Ey = e - c*x + 0*y;
xf = x + f*Ex;
yf = y + f*Ey;
plot(x,y,’k’);
f_palla(x,y, raggio, ’b’)
line([x xf],[y yf],’color’,’k’);
end
end
% ------------------------------------------------------% verifica
% ------------------------------------------------------xM = (xi+xj)/2; yM = (yi+yj)/2;
text(xM,yM,’ ij’,’fontsize’,14)
Ex = a + 0*xM + c*yM;
Ey = e - c*xM + 0*yM;
Vijn = Ex*Lijx+Ey*Lijy;
fprintf(’assegnato
%4.1f verifica
%4.1f \n’, Vij, Vijn)
%
xN = (xj+xh)/2; yN = (yj+yh)/2;
text(xN,yN,’ jh’,’fontsize’,14)
Ex = a + 0*xN + c*yN;
Ey = e - c*xN + 0*yN;
Vjhn = Ex*Ljhx+Ey*Ljhy;
151
152
CAPITOLO 9. RISOLUZIONE NUMERICA
fprintf(’assegnato
%4.1f verifica
%4.1f \n’, Vjh, Vjhn)
%
xP = (xh+xi)/2; yP = (yh+yi)/2;
text(xP,yP,’ hi’,’fontsize’,14)
Ex = a + 0*xP + c*yP;
Ey = e - c*xP + 0*yP;
Vhin = Ex*Lhix+Ey*Lhiy;
fprintf(’assegnato %4.1f verifica %4.1f \n’, Vhi, Vhin)
%
Questo programma utilizza la funzione seguente:
%
function f_palla(xC, yC, r, col)
traccia una circonferenza di centro C e raggio r
d = 2*pi /8;
T = 0 : d :2*pi;
X = xC + r*cos(T); Y = yC + r*sin(T);
fill(X,Y,col,’era’,’back’,’edgecolor’,col);
Congruenza di E. Dati 6 esagoni regolari, come da figura (9.7) e assegnate le tensioni
elettriche su tutti i lati orientati si domanda il vettore E nel vertice 1 valutandolo di volta in
volta per coppie di lati uscenti dal vertice 1. Ogni coppia di lati è relativa ad un triangolo.
Per fare il test del programma ”campoE.m” si comincia col supporre che il campo assegnato
10
8
8
2
6
9
4
3
3
2
7
1
2
A
4
0
1
-2
-4
4
10
5
6
6
5
12
-6
-8
11
-10
-10
-8
-6
-4
-2
0
2
4
6
8
10
Figura 9.7: dida
sia uniforme.
campo affine
triangolo Ex
Ey
1
13.00 2.31
2
1.61 8.89
3
11.00 14.31
4
11.00 9.69
5
22.39 3.11
6
13.00 −2.31
media :
12.00 6.00
esatto :
12.00 6.00
9.4. EQUAZIONE DI POISSON IN FORMA FINITA
9.4.3
153
~
Dati i flussi magnetici trovare B
Supponiamo che per ciascuna delle quattro facce del tetraedro sia assegnato il flusso magnetico Φ. Supponiamo che i quattro flussi siano tali da rendere soddisfatta la legge di Gauss
ovvero che la loro somma sia nulla.
Φh + Φi + Φj + Φk = 0.
(9.28)
In questo caso si dice che il flusso è solenoidale. Mostriamo che in tale ipotesi si può inter~ nell’interno del tetraedro con un campo vettoriale
polare il vettore induzione magnetica B
uniforme. In altre parole sarà possibile determinare un campo vettoriale uniforme che
fornisca sulle quattro facce i quattro flussi assegnati.
k
~h
A
Φ
I
~
B
~
B
~
H
j
h
Fm
Φh
i
b)
a)
J~
p
Figura 9.8: a) Il calcolo del flusso magnetico su una faccia; b) i vettori e le
grandezze usate nel campo magnetostatico.
~ di tipo uniforme il flusso
Postulato un campo del vettore induzione magnetica B
~ sarà
magnetico Φ su una superficie descritta dal vettore A
~·A
~ = Φ.
B
Con questa formula proviamo ad imporre che sulle quattro
flussi preassegnati.
Ahx Bx + Ahy By + Ahz Bz =
A B +A B +A B
=
ix x
iy y
iz z
A
B
+
A
B
+
A
B
=
jx x
jy y
jz z
Akx Bx + Aky By + Akz Bz =
(9.29)
facce il flusso uguagli quattro
Φh
Φi
Φj
Φk .
(9.30)
Ricordiamo che la somma dei vettori-area delle facce di un qualsiasi poliedro è identicamente
nulla. In particolare per un tetraedro sarà
~h + A
~i + A
~j + A
~k = 0
A
ovvero
Ahx + Aix + Ajx + Akx = 0, ecc.
(9.31)
154
CAPITOLO 9. RISOLUZIONE NUMERICA
Se sommiamo le prime tre equazioni e teniamo conto delle relazioni (9.31) e (9.28) otteniamo
la quarta equazione. Dunque solo tre equazioni sono indipendenti. Eliminando la quarta
abbiamo giusto tre equazioni per determinare le tre incognite Bx , By , Bz . Posto
¯
¯ A
¯ hx
¯
∆ = ¯ Aix
¯
¯ Ajx
Ahy Ahz
Aiy Aiz
Ajy Ajz
¯
¯
¯
¯
¯
¯
¯
(9.32)
si ricava
Φ Ahy Ahz
A
Φh Ahz
A
Ahy Φh
1 h
1 hx
1 hx
Bx = Φi Aiy Aiz ; By = Aix Φi Aiz ; Bz = Aiy Aiz Φi
∆
∆
∆
Φj Ajy Ajz
Ajx Φj Ajz
Ajy Ajz Φj
(9.33)
~ in termini di tre dei quattro flussi assegnati.
Queste formule forniscono le componenti di B
9.5
Equazione costitutiva Φ(Fm)
Con riferimento alla figura (9.9), indichiamo con Φβ il flusso magnetico associato alla faccia
sβ del complesso primale e indichiamo con Fβ la tensione magnetica associata alla linea
spezzata l̃β del complesso duale che è relativa alla faccia sβ del complesso primale sia in
2D che in 3D, indicata con spessore grosso in figura (9.9). Ciascuna di queste tensioni sarà
somma di due addendi relativi ai due tratti contenuti nelle due celle che hanno la faccia sβ
in comune.
Ci proponiamo di utilizzare l’equazione costitutiva F ↔ Φ per calcolare tutte le tensioni
magnetiche Fβ con k = 1, ...N2 una volta noti tutti i flussi magnetici Φβ con k = 1, ...N2 .
Φβ
Φβ
a)
b)
Fβ
Fβ
Figura 9.9: a) il flusso e la tensione magnetica in 2D; b) idem in 3D.
9.5. EQUAZIONE COSTITUTIVA Φ(FM )
155
~q
A
Fq
e
~
A
r
r
~r
L
~q
L
~p
L
e
q
Fr
c
r
a
c
b
b
~p
A
p
Φq
q
Φr
Fp
a
p
Φp
b)
a)
c)
~
H
c
Fq
Fr
~b
H
Φq
c
b
Φr
~
H
a
a
Fp
d)
Φp
e)
Figura 9.10: a) Il materiale è omogeneo (non necessariamente isotropo) entro
ciascuna cella; b) il campo magnetico è uniforme entro ciascuna microcella.
9.5.1
Calcolo per problemi piani
Facendo riferimento alla figura (9.10), consideriamo la generica cella primale bidimensionale
c, e siano p, q, r le tre facce. Dividiamo la cella primale in tre microcelle che denoteremo
con c1, c2, c34 . Faremo le seguenti ipotesi:
• il materiale sia omogeneo entro ciascuna cella: lo supporremo, per generalità, anisotropo;
• il campo magnetico sia uniforme ento ciascuna cella.
Potremo scrivere
~p · H
~a = L
~p · H
~b
Fp = L
e analoghe per Fq e Fr .
(9.34)
~ entro ciascuna microcella
Esprimiamo le tensioni magnetiche in funzione di H
(
Hax Lpx + Hay Lpy = Fp
Hax Lrx + Hay Lry
(
(
= Fr
Hbx Lpx + Hby Lpy = Fp
Hbx Lqx + Hby Lqy
Hcx Lqx + Hcy Lqy = Fq
Hx
)
(
Hx
Hy
(
Hx
Hy
"
=
Hy
= Fq
Hcx Lrx + Hcy Lry = Fr
4
(
"
=
"
=
c
Lpx Lpy
Lqx Lqy
Lrx Lry
Fp
)
(9.35)
Fr
#−1 (
Lqx Lqy
b
)
#−1 (
Lrx Lry
a
)
Lpx Lpy
Fp
)
(9.36)
Fq
#−1 (
Fq
Fr
)
(9.37)
L’idea delle microcelle per la suddivisione baricentrica è dovuta all’ing M. Marrone: si veda [38]
156
CAPITOLO 9. RISOLUZIONE NUMERICA
Le equazioni costitutive sono:
(
Bx
)
Bx
Bx
)
"
µxx µxy
=
µyx µyy
b
)
"
µxx µxy
=
By
# (
µyx µyy
a
By
(
µxx µxy
=
By
(
"
µyx µyy
c
)
Hy
e
# (
Hx
Hy
e
# (
e
Hx
Hx
Hy
a
)
(9.38)
b
)
c
~ p, A
~q, A
~ r i vettori-area delle tre facce della cella e se osserviamo
Se indichiamo con A
che ogni microcella divide queste facce in due parti uguali, possiamo esprimere i flussi sulle
6 facce delle microcelle mediante le espressioni
Φ̄pa
´
1³
Apx Apy
=
2
Φ̄pb =
Φ̄qc
´
1³
Apx Apy
2
´
1³
Aqx Aqy
=
2
(
)
Bx
Φ̄ra
By
(
a
)
Bx
Φ̄qb =
By
(
Bx
´
1³
Arx Ary
=
2
b
)
Φ̄rc
By
c
´
1³
Aqx Aqy
2
´
1³
Arx Ary
=
2
(
Bx
)
By
(
Bx
a
)
(9.39)
By
(
Bx
b
)
By
c
che si possono scrivere
(
Φ̄pa
)
=
Φ̄ra
1
2
"
=
(
Φ̄pb
)
=
Φ̄qb
1
2
=
Φ̄qc
Φ̄rc
)
=
1
2
# "
Arx Ary
P a Qa
"
Sa
# (
c
Apx Apy
b
b
M1,1
M1,2
"
Aqx Aqy
c
c
M2,1
M2,2
#"
µyx µyy
Fp
Lpx Lpy
#−1 (
Lrx Lry
Fp
)
Fr
(9.40)
)
Fr
#"
µxx µxy
µyx µyy
# (
#"
Fp
)
µxx µxy
µyx µyy
# (
c
# "
e
Lpx Lpy
#−1 (
Lqx Lqy
Fp
)
Fq
(9.41)
Fr
c
Arx Ary
c
c
M1,1
M1,2
µxx µxy
e
Aqx Aqy
b
b
M2,1
M2,2
"
=
Apx Apy
Ra
"
(
"
Fq
Fr
)
# "
e
Lqx Lqy
Lrx Lry
#−1 (
Fq
Fr
)
(9.42)
9.5. EQUAZIONE COSTITUTIVA Φ(FM )
157
Dal momento che i flussi attraverso le facce della cella sono
Φp = Φ̄pa + Φ̄pb
Φq = Φ̄qb + Φ̄qc
Φr = Φ̄rc + Φ̄ra
(9.43)
conviene scrivere
Φ̄pa
0
Φ̄ra
Φ̄pb
Φ̄qb
0
Φ̄rc
a
a
M1,1
0 M1,2
0
=
a
M2,1
0
0
0
a
M2,2
Fp
Fq
Fr
e
0
0
0
0
0
c
c
= 0 M1,1 M1,2
e
Fp
0
Fq
0
b
b
= M2,1 M2,2
(9.44)
b
b
M1,1
M1,2
0
Fr
e
0
Φ̄qc
c
M2,1
0
c
M2,2
(9.45)
e
Fp
Fq
Fr
e
(9.46)
e
Quindi
Φp
Φq
Φr
e
=
a + Mb )
(M1,1
1,1
b
M2,1
a
M2,1
Fp
b + Mc )
c
(M2,2
M
1,1
1,2
Fq
c
a + Mc )
M2,1
(M2,2
2,2
Fr
b
M1,2
a
M1,2
e
(9.47)
e
Invertendo per ogni cella questa matrice si potrà scrivere
Fp
Fq
Fr
e
Φp
= [S]e
Φq
Φr
(9.48)
e
ovvero si potranno scrivere, cella per cella, le tensioni magnetiche in funzione dei flussi
magnetici.
158
9.5.2
CAPITOLO 9. RISOLUZIONE NUMERICA
Pseudocodice del modulo che calcola le tensioni magnetiche
% sono note tutte le Φ(k): si vogliono trovare tutte le F (k)
inizializzare a zero tutte le componenti F (k)
% passare in rassegna una cella alla volta
ciclo su e da 1 a emax
% occorre passare da una numerazione locale ad una globale
p = E(e, 1); q = E(e, 2); r = E(e, 3);
calcola Lpx , Lpy , Lqx , Lqy , Lrx , Lry
calcola Apx , Apy , Aqx , Aqy , Aqx , Aqy
assegna le tre componenti µxx , µxy , µyy relative alla cella e
calcola le tre matrici Ma , Mb , Mc
componi la matrice Me
forma la matrice inversa: Se = Me−1
F p = S1,1 Φ(p) + S1,2 Φ(q) + S1,3 Φ(r)
F q = S2,1 Φ(p) + S2,2 Φ(q) + S2,3 Φ(r)
F r = S3,1 Φ(p) + S3,2 Φ(q) + S3,3 Φ(r)
% aggiungi agli F (k) i valori appena calcolati:
F (p) = F (p) + F p
F (q) = F (q) + F q
F (r) = F (r) + F r
fine ciclo su e
% A questo punto sono note tutte le F (k).
9.6
Equazione costitutiva Ψ(V )
Consideriamo una cella duale. Nel caso che si tratti di una cella di Voronoi ad ogni lato lα
del complesso primale corrisponde una faccia s̃α del duale. Ne viene che tanti sono i lati
che si dipartono da un nodo (=vertice primale) tante sono le facce della cella duale.
Nel caso di una divisione baricentrica, invece, la cella duale è un poliedro con molte più
facce (le chiameremo faccette) in quanto nell’interno di ogni cella primale vi cadono due
faccette in 2D e tre faccette in 3D. Ne viene che, per mantenere la corrispondenza tra il
numero di lati primali lα e quello di facce duali s̃α (cosa preziosa per mantenere intatta
la scrittura delle equazioni di campo) dovremo riguardare ogni faccia della cella duale non
più come una singola superficie piana ma bensı̀ come una superficie poliedrica composta di
tante faccette.
Facciamo riferimento al caso 2D. Dato un nodo h, come indicato in figura (9.11a) consideriamo la cella duale (9.11b) ed i lati da esso uscenti. Decomponiamo la cella duale in
microcelle a, b, ... come indicato in figura (9.11c). Al generico lato lα corrisponde una faccia
poliedrica composta da due faccette, come indicato in figura (9.11d) e (9.11e). Ciascuna
delle due faccette è contenuta in una cella diverso, indicati con e ed f in figura (9.11e).
Consideriamo ora la microcella a di e contenuta nella cella duale h. Consideriamo i semi-
9.6. EQUAZIONE COSTITUTIVA Ψ(V )
159
microcella
cella duale ṽh
nodo h
faccette
b
faccette
a
h
a)
b)
microcella
c)
faccia duale s̃α
faccia duale s̃α
f
b
a
h
e
h
lato primale lα
d)
lato primale lα
e)
f
Ψαb
lα
a
a
Vα0
Ψα
a
h
lβ
α
aαe
aβe
e
b
a
a
h
e
a
e
h
β
f)
Ψα
g)
Figura 9.11: Suddivisione baricentrica
a
Vβ0
Ψβ
h)
160
CAPITOLO 9. RISOLUZIONE NUMERICA
lati lα /2 e lβ /2 che delimitano nella microcella a. Indichiamo con Vα0 e Vβ0 le due tensioni
relative ai semilati in questione ed indichiamo con Ψaα e con Ψaβ i flussi dielettrici relativi
alle due faccette del duale contenute nella cella c. Varranno le due relazioni
Vα0 = Vα0 + Vα00
Ψα = Ψaα + Ψbα
(9.49)
Potremo scrivere
1
~e
Vα0 = ~lα · E
2
e analoghe
(9.50)
~ entro ciascuna microcella
Esprimiamo le tensioni elettriche in funzione di E
Eax lαx + Eay lαy
= 2Vα0
Eax lβx + Eay lβy
= 2Vβ0
(
Ex
)
"
=2
Ey
a
lαx lαy
#−1
Vα0
lβx lβy
V0
β
(9.51)
e analoghe per le altre microcelle. Le equazioni costitutive sono:
(
Dx
Dy
)
"
=
²xx ²xy
²yx ²yy
a
# (
Ex
)
Ey
a
(9.52)
a
e analoghe. Se indichiamo con ~sp , il vettore-area di una faccetta
Ψaα
³
=
saαx saαy
´
(
Dx
)
Ψaβ
Dy
³
=
saβx
saβy
a
´
(
Dx
Dy
)
(9.53)
a
che si può scrivere
Ψaα
Ψa
β
= 2
"
=
Quindi
"
saαx saαy
saβx saβy
P a Qa
Ra
Sa
²yx ²yy
#
Vα0
#"
lαx lαy
#−1
Vα0
lβx lβy
V0
β
(9.54)
V0
β
a
Ψα
²xx ²xy
Ψaβ
= P a Vα0 + Qa Vβ0
= Ra Vα0 + S a Vβ0
(9.55)
Consideriamo un nodo comune a 5 lati e calcoliamo il flusso relativo alle corrispondenti
5 facce spezzate.
9.6. EQUAZIONE COSTITUTIVA Ψ(V )
161
Ψ2
Ψ1
2
Ψ3
3
4
1
2
3
1
5
5
4
Ψ5
Ψ4
Figura 9.12: dida
Ψ15
= P 1 V50 + Q1 V10
Ψ1
1
= R1 V50 + S 1 V10
Ψ21
= P 2 V10 + Q2 V20
Ψ2
2
= R2 V10 + S 2 V20
Ψ32
= P 3 V20 + Q3 V30
Ψ3
3
= R3 V20 + S 3 V30
Ψ43
= P 4 V30 + Q4 V40
Ψ4
4
= R4 V30 + S 4 V40
Ψ54
= P 5 V40 + Q5 V50
Ψ5
5
= R5 V40 + S 5 V50
(9.56)
Il flusso relativo alle cinque “facce”, ciascuna composta di due faccette è dato da
Ψ1
Ψ2
Ψ3
Ψ4
Ψ5
Ψ1
Ψ2
Ψ3
=
Ψ4
Ψ5
=
=
=
=
=
Ψ11 + Ψ21
Ψ22 + Ψ32
Ψ33 + Ψ43
Ψ44 + Ψ54
Ψ55 + Ψ15
S1 + P 2
Q2
0
0
R1
2
2
3
3
R
S +P
Q
0
0
3
3
4
4
0
R
S +P
Q
0
0
0
R4
S4 + P 5
Q5
Q1
0
0
R5
S5 + P 1
(9.57)
V10
V20
V30
V40
V50
(9.58)
162
CAPITOLO 9. RISOLUZIONE NUMERICA
Risolvendo questo sistema si ottengono le cinque quantità V10 , V20 , V30 , V40 , V50 in funzione delle
Ψ1 , Ψ2 , Ψ3 , Ψ4 , Ψ5 in numerazione locale.
Si devono ora aggiungere alle V (k) i cinque valori trovati (passando dalla numerazione
locale a quella globale).
9.6.1
Pseudocodice del modulo che calcola il vettore {V }
% sono assegnate tutte le Ψ(k): si vogliono trovare tutte le V (k)
inizializzare a zero tutte le componenti V (k)
% passare in rassegna una cella alla volta
ciclo su n da 1 a nmax
i=0
[G]=0
ciclo su e da 1 a emax
se n è un vertice di e
i=i+1
individua i due lati p e q con vertice in n
calcola Lpx , Lpy , Lqx , Lqy
calcola spx , spy , sqx , sqy
assegna le tre componenti ²xx , ²xy , ²yy relative alla cella e
calcola le quattro quantità P (i), Q(i), R(i), S(i) con la (9.54)
PIAZZA le quattro quantità negli elementi della matrice G ...
risolvi il sistema {Ψ} = [G]{V 0 }
fine se
fine ciclo su e
% aggiungi ai V (k) i valori V ’:
ciclo su k da 1 a latimax
V(k)=V(k)+ G.... ♣
fine ciclo su k
fine ciclo su n
% A questo punto sono note tutte le V (k).
Appendice A
Vettori assiali e polari
Tutte le volte che si vuole rappresentare un elemento di superficie piana viene spontaneo
introdurre una vettore normale alla superficie di modulo uguale all’area dell’elemento. Un
elemento di superficie piana può essere dotato di orientazione interna od esterna. L’orientazione, dell’uno o dell’altro tipo è essenziale per decidere da che parte deve puntare il vettore
normale. Questo comporta che si utilizzi un regola di associazione quale la regola della vite
o della mano destra o dell’omino di Ampère (tre metodi equivalenti). Noi sceglieremo la
regola della vite ed in particolare la vite destra (che è la comune vite da ferro o da legno).
Il prodotto vettoriale tra i due vettori, indicato da Gibbs con il segno “×”, si scrive
w
~ = ~u ×~v .
(A.1)
Si noti che se i due vettori sono di tipo usuale, quali uno spostamento, una forza, una
velocità, il vettore w
~ ha un verso subordinato alla vite destra o sinistra che è stata scelta.
Una volta che sia stata scelta la vite destra è ovvio che questa non ha motivo di essere
cambiata nella vite sinistra. Ciononostante è interessante osservare che qualora si decidesse
di cambiare la vite destra nella vite sinistra cambierebbe il senso del vettore w.
~
Un vettore che sia subordinato alla regola della vite si chiama vettore assiale. Per
contrapposizione un vettore non subordinato alla regola della vite viene chiamato polare1 .
I francesi usano indicare un vettore assiale sovrapponendo alla lettera una freccetta
curva in luogo della tradizionale freccetta rettilinea. Purtroppo questa manca nei caratteri
tipografici usuali: in questo capitolo ci accontentiamo di usare un piccolo archetto in luogo
di una freccetta curva:
vettore assiale:
w̆ = ~u ×~v .
(A.2)
Nella meccanica si introduce il momento di una forza rispetto all’origine di un sistema di
assi mediante la formula
momento di una forza:
1
Spesso un vettore assiale viene chiamato pseudovettore.
163
def
M̆ = ~r × F~
(A.3)
164
APPENDICE A. VETTORI ASSIALI E POLARI
avendo indicato con ~r il vettore raggio e con F~ la forza applicata all’estremità del vettore
raggio. Sempre in meccanica si introduce il momento angolare rispetto all’origine di una
particella che ha quantità di moto p~ con la formula
momento angolare:
def
L̆ = ~r ×~
p.
(A.4)
In cinematica si introduce la velocità angolare di un corpo rigido come un vettore assiale
ω̆ tale che la velocità di un punto generico individuato dal vettore raggio ~r sia data dalla
formula
velocità:
~v = ω̆×~r.
(A.5)
Dal momento che sia il vettore ω̆ che il prodotto vettoriale utilizzano la regola della vite ne
viene che entrambi cambiano segno al cambiare della vite destra nella vite sinistra e quindi
il vettore ~v non cambia segno, come deve essere dal momento che la velocità è un vettore
polare.
Nell’elettromagnetismo quando si introduce il vettore induzione magnetica si fa uso del
prodotto vettoriale. Dal momento che la forza e la velocità sono entrambi vettori polari il
vettore induzione magnetica deve essere di tipo assiale ovvero
forza:
F~ = q ~v × B̆.
(A.6)
Il flusso magnetico è associato ad una superficie dotata di orientazione interna e quindi non
dipende dalla vite. La formula è correttamente scritta nella forma
Z
flusso magnetico:
Φ=
S
B̆ · d S̆.
(A.7)
Analogamente il vettore campo magnetico H̆ è definito mediante la regola della vite ed
è quindi di tipo assiale. Infatti quando si trattava di decidere il verso da dare ad H̆ si è
considerato il senso della corrente nel solenoide e con la vite si è fissato il verso di H̆. Anche
la tensione magnetica è indipendente dalla regola della vite. Dal momento che H̆ vi dipende
l’elemento di linea dotato di orientazione esterna (un senso di rotazione attorno alla linea)
deve essere rappresentato da un vettore assiale dL̆
Z
tensione magnetica:
Fm =
L̃
H̆ · dL̆.
(A.8)
La mancata distinzione tra vettori assiali e polari nella notazione tradizionale è una perdita
di informazione.
Come regola generale: gli elementi di superficie con orientazione interna e i segmenti di
linea con orientazione esterna devono essere rappresentate da vettori assiali.
Se vogliamo rappresentare un elemento di superficie piana a forma di parallelogramma
dotata di orientazione interna mediante un vettore, detti ~a e ~b i due vettori che ne formano
i lati e che hanno l’origine in comune scriveremo
vettore-area:
S̆ = ~a ×~b.
(A.9)
165
Tavola I: Alcune formule che combinano vettori assiali e polari.
Z
flusso elettrico:
Ψ=
S̃
Z
tensione elettrica:
Z
~ · dS
~
D
U=
L
B̆ · d S̆
Φ=
flusso magnetico:
S
Z
~ · dL
~
E
tensione magnetica: Fm =
L̃
H̆ · d S̆
corrente di energia
(vettore di Poynting)
~=E
~ × H̆
S
densità di quantità
di moto elettrom.
~ = D×
~ B̆
G
densità di energia
elettrica
ue =
1 ~ ~
E ·D
2
1
T trasl = p~ · ~v
2
densità di energia
magnetica
um =
en. cin. rotatoria
T rot
en. cin. traslatoria
1
B̆ · H̆
2
1
= L̆ · ω̆
2
E’ evidente che un elemento di superficie dotato di orientazione esterna deve essere descritto da un vettore polare. E’ facile rappresentare con le mani un’orientazione esterna: se
la palma di una mano aperta rappresenta l’elemento di superficie piana facendola attraversare dal dito indice dell’altra mano indichiamo una orientazione esterna. Senonché nessuno
ha trovato un modo per definire matematicamente la normale ad un elemento di superficie
... se non partendo dall’orientazione interna della medesima ed applicando la regola della
vite!
Vediamo come si procede. In primo luogo si osserva che la vite destra è quella comunemente scelta per gli assi cartesiani x, y, z. Una trasformazione della base ~ex , ~ey , ~ez (terna
destra) nella base ~ex0 , ~ey0 , ~ez 0 (terna sinistra) può essere, ad esempio,
ex0
~
~ex0 = ~ey
~ey0 = ~ex
~ez 0 = ~ez
ovvero
~e
0
y
~
ez 0
0 1 0
ex
~
~ey
= 1 0 0
.
0 0 1 ~ez
(A.10)
Il determinante di questa trasformazione è −1. Più in generale si può fare una trasformazione
ex0 = cxx ~ex + cxy ~ey + cxz ~ez
~
~ey0 = cyx ~ex + cyy ~ey + cyz ~ez
(A.11)
~
ez 0 = czx ~ex + czy ~ey + czz ~ez
ovvero
ex0
~
~e
0
y
~
ez 0
c1,1 c1,2 c1,3
ex
~
~e
= c2,1 c2,2 c2,3
y
c3,1 c3,2 c3,3 ~ez
(A.12)
in cui la matrice c prende il nome di matrice di transizione. Indicando con ∆ il determinante
di questa matrice si vede facilmente che se la nuova terna è sinistra il determinante è
166
APPENDICE A. VETTORI ASSIALI E POLARI
negativo. Ne viene che il segno del determinante della matrice di transizione indica il
passaggio da una terna destra ad una terna sinistra e viceversa. Avremo
sgn(∆) ≡
∆
.
|∆|
(A.13)
Fra i due simboli equivalenti è più comodo usare il secondo.
Tavola II: Natura vettoriale dei vettori dell’elettromagnetismo (S~ è il
vettore di Poynting).
orientazione interna orientazione esterna
vettore di linea
associato a linee
~ P~
E,
polare
~ M
~
H,
assiale
vettore di superficie
associato a superfici
~
B
assiale
~ J,
~ S
~
D,
polare
fine
Appendice B
Sulle definizioni operative
Molti libri di fisica sostengono che in fisica non si debbono usare grandezze che non siano
misurabili.
Nulla è più sciocco di questo tabù.
~ che non è misurabile, l’entropia
Gli stessi autori usano il potenziale vettore magnetico A
S che non è misurabile, l’energia potenziale V che non è misurabile, la funzione d’onda ψ
della meccanica quantistica che non è misurabile. Si tratta di un malinteso che viene
erroneamente attribuito ad Heisenberg.
È evidente che la fisica debba partire da grandezze misurabili ma nel corso del suo
svolgimento è libera di introdurre grandezze che non sono direttamente misurabili purché
da esse si possano ottenere grandezze misurabili.
Cosı̀ la funzione d’onda ψ, definita a meno di un fattore di fase exp(iφ) non è misurabile
ma il prodotto ψψ ∗ integrato su una regione di spazio dà la probabilità di trovare una
particella entro quella regione e quest’ultima è una grandezza misurabile.
L’energia potenziale è definita a meno di una costante arbitraria e come tale non è
misurabile. La sua variazione però dà il lavoro ceduto o assorbito dal sistema cioé una
quantità misurabile.
~ definito a meno del gradiente della funzione di gauge
Il potenziale vettore magnetico A,
~ che è misurabile.
ξ non è misurabile ma il suo rotore è il vettore induzione magnetica B
L’entropia non è misurabile ma la variazione dell’entropia di un sistema è il rapporto
Q/T essendo Q il calore assorbito da un sistema e T la temperatura assoluta alla quale
questo assorbimento avviene.
Per togliere quindi questo tabù citiamo le opinioni di alcuni fisici di grande rilievo.
“E’ assolutamente falso, sebbene lo si dica spesso, che l’immagine del mondo della fisica
contenga, o possa contenere, soltanto grandezze direttamente osservabili. Al contrario,
grandezze direttamente osservabili non si trovano assolutamente nell’immagine del mondo.”
[M. Plank, Autobiografia Scientifica, Einaudi, 1956, pag. 78.]
“It is not true that we can pursue science completely by using only those concepts which
are directly subject to experiment.” [Feynmann, Lectures on physics, vol. III, pag. 29.]
167
168
APPENDICE B. SULLE DEFINIZIONI OPERATIVE
“Non tutte le grandezze di cui si serve il fisico nei suoi ragionamenti possono essere osservate e misurate. Alcune servono solo come strumenti necessari al calcolo, ma si trascurano
nelle verifiche sperimentali. Ponendosi da un punto di vista puramente fenomenologico,
si è cercato di espellere dalle teorie fisiche tutte le grandezze non misurabili; la dottrina
energetica e, più recentemente, la meccanica quantistica di Heisenberg sono esempi notevoli
di tentativi del genere. Ma questi tentativi non sono mai completamente riusciti e nelle
teorie intervengono sempre certe grandezze non misurabili: cosı̀ in meccanica ondulatoria
la famosa funzione d’onda Ψ. Nondimeno le grandezze misurabili hanno una importanza
maggiore, perché solo per esse la teoria può ricevere l’indispensabile controllo sperimentale
delle sue conseguenze.. . .
“Insomma, ci sembra che non bisogna esagerare la portata della distinzione tra grandezze
misurabili e grandezze semplicemente definibili.” [de Broglie, Fisica e Miscrofisica, Einaudi,
pag. 89-92.]
“Now we do not accept the ”posivistic” standpoint, according to which only observables
may be employed in theoretical physics, but instead are of the opinion that the introduction
of not directly observable quantities is justified whenever the resulting conclusions agree
with experiment (as in the kinetic theory of gases). Nevertheless we demand that the
concepts introduced in a hypothesis may be based at least on an imaginary experiment, i.e.
an observational method, even if it cannot be carried out in practice.” [A. Sommerferld,
Electrodynamics, Academic Press, pag. 72.]
“It is often said that it was a metaphysical idea which led Heisenberg to the principle of
matrix mechanics, and this statement is used by the believers in the power of pure reason
as an example in their favour. Well, if you were to ask Heisenberg, he would strongly
oppose this view. As we worked together I think I know what was going on in his mind.
At that time we were all convinced that the new mechanics must be based on new concepts
having only a loose connection with classical concepts, as expressed in Bohr’s postulate of
correspondence. Heisenberg felt that quantities which had no direct relation to experiment
ought to be eliminated. He wished to found the new mechanics as directly as possible on
experience. If this is a ’metaphysical’ principle, well, I cannot contradict; I only wish to
say that is is exactly the fundamental principle of modern science as a whole, that which
distinguishes it from scholasticism and dogmatic systems of philosophy. But if it is taken
(as many have taken it) to mean the elimination of all non-observables from theory, it
leads, to nonsense. For instance, Schroedinger’s wave function ψ is such a non-observable
quantity, but it was of course later accepted by Heisenberg as a useful concept. He stated
not a dogmatic, but a heuristic principle. He found by an act of scientific intuition the
spurious conceptions that have to be eliminated. I shall try to describe this.” [Max Born,
Experiment and Theory in Physics, Dover, 1956, pag. 18.]
fine
Appendice C
Covarianza e controvarianza rese
semplici
Fin dalle scuole inferiori si insegnano le equivalenze tra le unità di misura: ad esempio 2
kg= 2000 g. In generale una grandezza fisica è composta da una unità di misura e da un
valore numerico. Se l’unità di misura diventa più piccola il valore numerico diventa più
grande, ovvero l’unità di misura ed il valore variano in modo contrario. Se l’unità è c volte
più piccola il valore della grandezza è moltiplicato per 1/c. Quello che non si dice nelle
scuole inferiori è che le due parti della grandezza sono “controvarianti”. Si può enunciare
questa regola: il valore di qualunque grandezza fisica è controvariante rispetto alla sua unità
di misura.
Passiamo ora a considerare il prezzo di un bene. Esso è per definizione il rapporto tra
il costo e la quantità:
costo
prezzo =
.
(C.1)
quantità
Se 3000 g di zucchero costano 6000 L il prezzo è
p=
6000 L
= 2 L/g.
3000 g
(C.2)
Se cambiamo l’unità di misura delle quantità il prezzo cambia: come?
p0 =
6000 L
= 2000 L/kg.
3 kg
(C.3)
Siamo passati dal grammo al kilogrammo, una unità di misura 1000 volte più grande.
Questa volta vediamo che il prezzo è 1000 volte più grande ovvero cambia come l’unità
di misura della quantità. Se l’unità di misura è c volte la precedente anche il prezzo è c
volte il precedente. Si dice che i due enti sono covarianti. È giusto che il prezzo vari
come l’unità di misura in quanto nella sua definizione la quantità si trova a denominatore.
Il termine “controvarianza” significa varianza contraria, il termine “covarianza” significa
varianza come.
169
170
APPENDICE C. COVARIANZA E CONTROVARIANZA RESE SEMPLICI
Si noti che il prezzo, come tutte le grandezze, è controvariante rispetto al cambiamento
della sua unità di misura: risulta invece covariante rispetto al cambiamento dell’unità di
misura delle quantità.
Quando andiamo a fare la spesa acquistiamo un certo numero n di beni: siano q k le
quantità dei beni e pk i loro prezzi. Per convenzione le grandezze controvarianti si indicano
con l’indice in alto (apice) mentre le grandezze covarianti si indicano con l’indice in basso
(pedice). La spesa è:
S=
n
X
pk q k .
(C.4)
k=1
La spesa non cambia se cambiamo l’unità di misura delle quantità. Infatti se moltiplichiamo
l’unità di misura per c risulta
1
0
qk = qk
c
e quindi
0
S =
X
k
pk 0 q
k0
=
X
pk0 = cpk
µ ¶
(c pk )
k
1
c
qk =
(C.5)
X
pk q k = S.
(C.6)
k
Diremo che la spesa è invariante rispetto al cambiamento dell’unità di misura delle quantità. La relazione (C.6) è una forma lineare nelle q k e nelle pk ovvero è una forma
bilineare.
Abbiamo cosı̀ introdotto ad un livello elementare tre nozioni di varianza:
• la controvarianza;
• la covarianza;
• l’invarianza.
C.1
Versione geometrica
Spazio unidimensionale. Se dobbiamo riportare una grandezza su un asse dobbiamo
scegliere una unità di misura. In particolare se si tratta di un vettore dobbiamo usare un
vettore base che si indica con ~e. Se ~v è il vettore potremo scrivere
~v = v~e.
(C.7)
Se facciamo un cambiamento del vettore base secondo la formula ~e 0 = c ~e, la componente v
cambia secondo la legge
~v = v 0~e 0 = v 0 (c ~e) = (v 0 c) ~e = v ~e
(C.8)
avendo posto
quindi la componente è controvariante.
1
v0 = v
c
(C.9)
C.1. VERSIONE GEOMETRICA
171
Spazio bidimensionale Se
~v = v 1~e1 + v 2~e2
(C.10)
facendo un cambiamento della base
~
e10
= c110 ~e1 + c210 ~e2
~
e20
= c120 ~e1 + c220 ~e2
(C.11)
e scrivendo la relazione precedente nella forma matriciale
(~e 01 ~e 02 ) = (~e1 ~e2 )
c110
c220
c110
c220
(C.12)
le componenti del vettore cambiano secondo la formula
0
0
0
0
~v = v 1 ~e10 + v 2 ~e20 = v 1 [c110 ~e1 + c210 ~e2 ] + v 2 [c120 ~e1 + c220 ~e2 ]
0
0
0
0
= [v 1 c110 + v 2 c120 ]~e1 + [v 1 c210 + v 2 c220 ]~e2
(C.13)
quindi
v1
v2
0
0
0
v 1 c210
0
v 2 c220
= v 1 c110 + v 2 c120
=
+
v1
→
v2
=
c110
c120
c210
c220
0
v1
20
0
~v = c ~v .
(C.14)
v
Si faccia attenzione che la matrice introdotta non è la matrice del sistema (C.12) ma la sua
trasposta. Questa matrice prende il nome di matrice di transizione da una base all’altra.
Si noti ancora che non abbiamo fatto un cambiamento di coordinate bensı̀ un cambiamento
della base di uno spazio vettoriale. Invertendo si ottiene
(
0
v1
0
v2
)
=
C11 C12
C21 C22
(
v1
v2
)
♣
0
~v = C ~v
(C.15)
avendo indicato con C la matrice inversa della c. Possiamo concludere che in uno spazio
vettoriale le componenti di un vettore per un cambiamento della base sono controvarianti.
Forza e spostamento Consideriamo la nozione di lavoro e compariamola con la nozione di costo di una quantità di beni. Lo spostamento ~u è il prototipo dei vettori controvarianti
rispetto all’unità di misura della lunghezza per cui scriveremo:
~s = u1~e1 + u2~e2 + u3~e3
(C.16)
[si noti che diciamo che il vettore è controvariante in quanto le sue componenti sono controvarianti]. Se consideriamo il lavoro come la grandezza invariante ne segue che la forza
deve essere un vettore covariante. Infatti
w = f1 u1 + f2 u2 + f3 u3 .
(C.17)
172
APPENDICE C. COVARIANZA E CONTROVARIANZA RESE SEMPLICI
Quando si vuole far uso della notazione matriciale (ciò che torna molto comodo) un vettore
controvariante si scrive come vettore colonna mettendo le parentesi graffe ed uno covariante
come vettore riga con le parentesi tonde:
~u →
1
s
s2
s3
f~ →
³
´
f1 f2 f3
.
(C.18)
1
Cambiamento della base scritta come sistema:
~
e10
= c110 ~e1 + c210 ~e2
~
e20
= c120 ~e1 + c220 ~e2
(C.19)
.
Attenzione : la matrice formata da questi coefficienti presi nell’ordine indicato NON è la
matrice di transizione. Gli indici inferiori sono primati [?, p.168].
~ei0 ≡ cii0 ~ei .
(C.20)
Scrittura matriciale
( ~e10 ~e20 ) = ( ~e1 ~e2 )
c110
c120
c210
c220
(C.21)
i primi come pedici. Questa è la matrice di transizione indicata con c. Essa è la trasposta
della matrice del sistema della (C.19).
Scrittura matriciale compatta
0
~e = ~ec.
(C.22)
fine
1
Si noti che alcuni autori mettono le parentesi tonde anche per i vettori riga e che molti autori
non distinguono graffe, tonde e quadre e usano sempre le stesse parentesi per qualunque tipo di
vettore oltreché per le matrici.
Appendice D
Successive overrelaxation
For benefit of the reader we shall describe one of the most effective and fascinating iterative
method, the one of Successive Overrelaxation, briefly called SOR. Given an algebraic system
a11 x1 + a12 x1 + .... + a1n x1 = b1
a x + a x + .... + a x = b
21 1
22 1
2n 1
2
.....
(D.1)
an1 x1 + an2 x1 + .... + ann xn = bn
in which the elements of the main diagonal are dominant, i.e. satisfy the relation [21, p.322]
|ahh | ≥
X
|ahk |
(D.2)
k6=h
Solving the h − th equation with respect to xh the system becomes
x1 =
x =
2
.......
x =
n
1
[b1 − (0 + a12 x2 + .... + a1n xn )]
a11
1
[b2 − (a21 x1 + 0 + .... + a2n xn )]
a22
(D.3)
1
[bn − (an1 x1 + an2 x2 + .... + 0)]
ann
To solve the system we apply the method of successive substitutions. One starts assigning
to all xh of the right side of Eq. (D.3) a value, say 0, and then evaluate the xh of the left
side. Inserting last values in the right side we obtain a new set of value, end so on. This is
the Gauss-Seidel method.
One may modify the form of the system adding and subtracting the term xh on the
173
174
APPENDICE D. SUCCESSIVE OVERRELAXATION
right side. One obtains
1
x1 = x1 +
[b1 − (a11 x1 + a12 x2 + .... + a1n xn )]
a
11
x = x + 1 [b − (a x + a x + .... + a x )]
2
2
2
21 1
22 2
2n n
a22
...
1
xn = xn +
[bn − (an1 x1 + an2 x2 + .... + ann xn )]
(D.4)
ann
The advantage of this form is that it appears the term
²h = [bh − (ah1 x1 + ah2 x2 + .... + ahn xn )]
(D.5)
that is the residual of the h − th equation (D.4). Then we can write
1
x1 = x1 +
²1
a11
x =x + 1 ²
2
2
2
a22
...
1
xn = xn +
²n
(D.6)
ann
To increase the rate of convergence one may multiply the residual ²k by a relaxation factor
ω, with 1 < ω < 2. The best value of ω can be determined by trial and errors (an initial
trial may be 1.4).
The system to be solved becomes
1
x1 = x1 +
ω [b1 − (a11 x1 + a12 x2 + .... + a1n xn )]
a
11
x = x + 1 ω [b − (a x + a x + .... + a x )]
2
2
2
21 1
22 2
2n n
a22
...
1
xn = xn +
ω [bn − (an1 x1 + an2 x2 + .... + ann xn )]
(D.7)
ann
If the matrix is symmetric and positive definite the SOR method converges for every value
0 < ω < 2. As references we quote [6, p.555].
fine
Appendice E
Moto di una particella
Le equazioni differenziali del moto di una particella sono
~v (t) =
d ~r(t)
dt
p~(t) = m ~v (t)
d p~(t)
= f~(t, ~r, ~v )
dt
(E.1)
Le corrispondenti equazioni in forma finita sono
~s = ~r + − ~r −
p~ = m
~s
τ
p~ + − p~ − = I~
(E.2)
Si noti che nella (E.2) sono utilizzate solo variabili globali nel tempo.
Se le equazioni in forma finita si intendono dedotte da quelle in forma differenziale
per integrazione sul tempo non si afferra la corretta associazione delle variabili globali agli
elementi temporali (istanti ed intervalli) del complesso primale e duale nel tempo.
Infatti con riferimento alla tavola (III) si vede che sussiste la seguente associazione:
vettore posizione ~r
vettore spostamento ~s
quantità di moto p~
impulso I~
istanti primali tn
intervalli primali τ n
istanti duali t̃n
intervalli duali τ̃ n
~r(tn )
~s(τ n )
p~(t̃n )
~ n)
I(τ̃
(E.3)
Tenendo conto di questa associazione le tre equazioni (E.2) possono scriversi
~r(tn ) = ~r(tn−1 ) + τn ~v (t̃n )
p~(t̃n ) = m ~v (t̃n )
~(t̃n+1 ) =
p
(E.4)
p~(t̃n ) + τ̃n f~(tn ).
Il fatto caratteristico di questa formulazione è che le quantità di moto sono valutate nei
punti intermedi degli intervalli primali. In particolare la quantità di moto iniziale non è da
assegnarsi allo stesso istante in cui si assegna la posizione.
175
176
APPENDICE E. MOTO DI UNA PARTICELLA
Tavola I: Variables of particle mechanics in the differential setting.
configuration variables
(kinematical variables)
primal complex: inner orientation
source variables
(dynamical variables)
dual complex : outer orientation
Particle mechanics
differential formulation
I
T̃
- f~
* f~ = −k ~r
~r
~v =
d~r
dt
T
~v
Ĩ
- p
~
p~ = m~v
v(t̃n )
momentum
def
mechanics
v(t̃n ) =
I[τ̃ n ]
τ̃n
p[t̃n+1 ]
t̃n+1
t̃n
tn−1
def
I[τ̃ n ]
p[t̃n ]
τ̃ n
u[τ n ]
τn
f (tn ) =
d~
p
f~ =
dt
f~ = −h ~v
r[tn−1 ]
t
tn
τn
r[tn ]
u[τ n ]
position vector
f (tn )
Figura E.1: La associazione delle variabili meccaniche agli elementi temporali di
un complesso di celle e del suo duale.
177
Tavola II: Diagram connecting the global variables of particle mechanics.
The variables in the same column have the same dimensions and also the
same units: meter for the left column and newton × sec for the right one.
configuration variables
(kinematical variables)
primal complex: inner orientation
dimensions: length [L]
source variables
(dynamical variables)
dual complex : outer orientation
dimensions: action/length [M LT −1 ]
Particle mechanics
discrete formulation
~r
I
1
I~
I~ law
= −k ~r(tn )
τ̃n
T̃
I~ law
~s
=
−h
τ̃n
τn
T
~s
law
p~ = m
~s
τn
˜ p = I~
∆~
~s = ∆~r
p~
Ĩ
~ n ) impulse
I(τ̃
p~(t̃n ) momentum
~r(tn ) position vector
~s(τn ) displacement
Tavola III: Un complesso di celle nel tempo ed il suo duale.
dual
primal
t̃n
-
tn−1
-
τn
-
τ̃ n
-
tn
t̃n+1
-
τ n+1
- - t
tn+1
178
E.0.1
APPENDICE E. MOTO DI UNA PARTICELLA
Moto unidimensionale.
Per semplificare lo studio esaminiamo dapprima il moto unidimensionale di una particella
lungo l’asse delle ascisse. Possiamo scrivere
x(tn ) = x(tn−1 ) +
τn
p(t̃n )
m
(E.5)
p(t̃
n+1 ) = p(t̃n ) + τ̃n f (tn , xn , vn ).
Moto armonico. In questo caso la forza dipende dalla posizione secondo la formula
f (tn , xn , vn ) = −k x(tn ).
(E.6)
Le equazioni (E.5) divengono quindi
x(tn ) = x(tn−1 ) +
τn
p(t̃n )
m
(E.7)
p(t̃
n+1 ) = p(t̃n ) − τ̃n k x(tn )
che si possono scrivere nella forma sintetica
xn = xn−1 +
pn+1/2
=
pn−1/2
τn n−1/2
p
m
+ τ̃n
(E.8)
k xn .
Moto armonico smorzato. In tal caso la forza dipende sia dalla posizione che dalla
velocità secondo la formula
f (tn , xn , vn ) = −k x(tn ) − c v(tn ).
(E.9)
Dal momento che la velocità è naturalmente associata agli istanti duali la v(tn ) deve essere
interpolata nel modo seguente
v(tn ) =
v(t̃n+1 ) + v(t̃n )
.
2
(E.10)
Le equazioni (E.5) divengono quindi
x(tn ) = x(tn−1 ) + τn
p(t̃n )
m
τ̃ c p(t̃n+1 ) + p(t̃n )
p(t̃n+1 ) = p(t̃n ) − τ̃n k x(tn ) − n
m
(E.11)
2
Nella seconda equazione la quantità di moto all’istante t̃n+1 compare sia al primo che al
secondo membro e vi compare linearmente. Questo consente di raccoglierla al primo membro
ottenendo
µ
¶
µ
¶
τ̃n c
τ̃n c
1+
p(t̃n+1 ) = 1 −
p(t̃n ) − τ̃n k x(tn ).
(E.12)
2m
2m
179
Posto
τ̃n c
def
2m
A =
τ̃n c
1+
2m
il sistema (E.12) si può scrivere
1−
def
B =
x(tn ) = x(tn−1 ) +
τ̃n k
τ̃n c
1+
2m
τn
p(t̃n )
m
p(t̃
n+1 ) = A p(t̃n ) − B x(tn )
(E.13)
(E.14)
Confronto. È interessante osservare la differenza tra il metodo di integrazione di Eulero
ed il presente metodo:
(metodo delle celle)
x(t0 ) := assegnato
p (t̃1 ) := assegnato
for n:=1 to Nmax
(metodo di Eulero)
x(t0 ) := assegnato
p(t0 ) := assegnato
for n =1 to Nmax
τ
p (t̃n )
m
p (t̃n+1 ) := p (t̃n ) − τ kx(tn )
end;
τ
p (tn−1 )
m
p (tn ) := p (tn−1 ) − τ kx (tn−1 )
end;
E.0.2
x(tn ) := x(tn−1 ) +
(E.15)
x (tn ) := x (tn−1 ) +
Moto tridimensionale
Le equazioni (E.14), per il caso tridimensionale possono scriversi
xnh = xn−1
+
h
n+1/2
ph
τn n−1/2
p
m h
n−1/2
= A ph
fine
− B xnh
(E.16)
180
APPENDICE E. MOTO DI UNA PARTICELLA
Appendice F
Punti di Gauss
Ci proponiamo di indicare un procedimento per valutare in modo esatto l’integrale di un
polinomio p(x) entro un intervallo chiuso e limitato [a, b]. Si noti che l’integrale di un
polinomio si può sempre eseguire con esattezza in quanto siamo in grado di eseguire gli
integrali dei singoli monomi con la formula
Z
b
xk dx =
a
´
1 ³ k+1
b
− ak+1 .
k+1
(F.1)
L’obiettivo nostro è però di mostrare che tale integrale si può fare velocemente utilizzando
i valori del polinomio in determinati punti xk dell’intervallo: sono questi i punti di Gauss.
Il nostro obiettivo è quello di determinare certe ascisse xk e certi pesi wk in modo da
esprimere l’integrale definito mediante la formula
Z
b
p(x) dx =
a
n
X
wk p(xk )
(F.2)
k=1
Le considerazioni fatte da Gauss e riportate sui libri di analisi numerica sono piuttosto
complesse. Noi mostriamo un procedimento che rende molto semplice il raggiungimento del
risultato.
F.1
Intervallo canonico
Innanzi tutto consideriamo un intervalo canonico [-1,+1], come si fa solitamente e calcoliamo
l’integrale di un polinomio di grado n.
Z
J=
+1
−1
(a0 + a1 ξ + a2 ξ 2 + a3 ξ 3 + ... + an ξ n ) dξ
(F.3)
Scomponendo l’integrale in tanti integrali ci rendiamo conto che gli integrali delle potenze
dispari nell’intervallo considerato si annullano. Infatti
Z
+1
−1
"
ξ2
ξ dξ =
2
#+1
Z
=0
+1
−1
−1
181
"
ξ4
ξ dξ =
4
#+1
3
=0
−1
(F.4)
182
APPENDICE F. PUNTI DI GAUSS
Ne viene che nell’intervallo canonico [-1,+1] il valore dell’integrale dipende solo dai termini
di grado pari . Per essi si ha
Z
"
+1
ξ
−1
2m
ξ 2m+1
dξ =
2m + 1
#+1
=
−1
2
2m + 1
(F.5)
Per mantenere l’esposizione ad un livello elementare consideriamo dapprima un polinomio
di terzo grado poi uno di quinto grado.
F.1.1
Polinomi di terzo grado
Z
J=
+1
−1
Z
(a0 + a1 ξ + a2 ξ 2 + a3 ξ 3 ) dξ =
+1
−1
·
(a0 + a2 ξ 2 ) dξ = 2 a0 +
a2
3
¸
(F.6)
Dal momento che un polinomio di grado tre ha quattro coefficienti si vede come l’integrale del polinomio nell’intervallo considerato dipende solo dai coefficienti dei termini pari
e quindi da due coefficienti.
Se indichiamo con g l’ascissa di un punto potremo scrivere
p(+g) = a0 + a1 g + a2 g 2 + a3 g 3
2
3
p(−g) = a0 − a1 g + a2 g − a3 g
(F.7)
Si vede che sommando le due equazioni scompaiono i coefficienti delle potenze dispari,
proprio come accade nell’integrale (F.6). Si ottiene
p(+g) + p(−g) = 2 (a0 + a2 g 2 )
(F.8)
1
g = ± √ = ± 0.5773502692
3
(F.9)
Se poniamo g 2 = 1/3 ovvero
otteniamo esattamente la formula (F.6) Le ascisse g1 = −g e g2 = +g sono quelle dei due
punti di Gauss cercati [Atkinson p.276]. In conclusione per un polinomio di terzo grado
nell’intervallo canonico [-1,+1] si ha
w1 = 1
F.1.2
g1 = −0.5773502692
w2 = 1
g2 = 0.5773502692
(F.10)
Polinomi di quinto grado
J
Z
=
+1
−1
+1
(a0 + a1 ξ + a2 ξ 2 + a3 ξ 3 + a4 ξ 4 + a5 ξ 5 ) dξ
Z
=
−1
(a0 + a2 ξ 2 + a4 ξ 4 ) dξ
·
= 2 a0 +
a2 a4
+
3
5
¸
(F.11)
F.1. INTERVALLO CANONICO
183
Dal momento che un polinomio di grado cinque ha sei coefficienti si vede come l’integrale
del polinomio nell’intervallo considerato dipende solo dai coefficienti dei termini pari e quindi
da tre coefficienti.
Nel paragrafo precedente abbiamo visto che è sufficiente valutare il polinomio p(ξ) in
due punti +g e −g simmetricamente disposti rispetto all’origine. Vediamo se con tre valori
simmetricamente disposti attorno all’origine (e quindi uno sarà necessariamente lo zero)
possiamo valutare l’integrale con tre valori del polinomio. Se sono g1 , g2 , g3 i tre punti
dovrà essere g3 = −g1 e g2 = 0. Quindi ci basta g1 . Potremo scrivere
2
3
4
5
p(+g1 ) = a0 + a1 g1 + a2 g1 + a3 g1 + a4 g1 + a5 g1
= a
p(0)
(F.12)
0
p(−g ) = a − a g + a g 2 − a g 3 + a g 4 − a g 5
1
0
1 1
2 1
3 1
4 1
5 1
Si vede che sommando la prima e l’ultima equazione scompaiono i coefficienti delle potenze
dispari, come nell’integrale. Si ottiene
p(+g1 ) + p(−g1 ) = 2(a0 + a2 g12 + a4 g14 )
(F.13)
Se si potesse trovare un g1 tale che g12 = 1/3 e g14 = 1/5 avremmo risolto il problema.
Dal momento che questo non è possibile proviamo a fare una combinazione lineare dei due
termini con due coefficienti w2 e w1 :
J
= w2 p(0) + w1 ¡[p(+g1 ) + p(−g1 )]¢
= w2 a0 + 2 w1 a0 + a2 g¡12 + a4 g14
¢
= (w2 + 2 w1 ) a0 + 2 w1 a2 g12 + a4 g14
(F.14)
Dovrà essere
µ
(w2 + 2 w1 )a0 +
Se imponiamo
2 w1 a2 g12
+
2 w1 a4 g14
w2 + 2 w1
w1 g12
w1 g14
=2
a2 a4
a0 +
+
3
5
¶
= 2
= 1/3
= 1/5
(F.15)
(F.16)
Dividendo la terza equazione per la seconda otteniamo
p
g1 = − 3/5 = − 0.77459666924148
g2 = 0
g = +p3/5 = + 0.77459666924148
3
w1 = +5/9 = + 0.55555555555556
w2 = +8/9 = + 0.88888888888889
w3 = +5/9 = + 0.55555555555556
che sono i tre punti di Gauss cercati con i relativi pesi [Atkinson p.276].
(F.17)
184
APPENDICE F. PUNTI DI GAUSS
F.2
Intervallo generico
Se l’integrale da calcolare è da valutare nel generico intervallo [a, b] invece che in [−1, 1]
occorre fare la trasformazione
b+a b−a
x=
+
ξ
(F.18)
2
2
Infatti questa relazione fa corrispondere a ξ = −1 il valore x = a e a ξ = +1 il valore x = b.
Quindi
Z
b
p(x) dx =
a
X
wk p(xk )
essendo
k
fine
xk =
b+a b−a
+
gk
2
2
(F.19)
Bibliografia
[1] Abraham M., Theorie der Elektrizität II, (3◦ edizione Lipsia) 1914.
[2] Agazzi E., Temi e problemi di filosofia della fisica, Abete ♣
[3] Alexandrov P., Elementary Concepts of Algebraic Topology, Dover, 1961.
[4] Alexandrov P.S., Topologia combinatoria, Einaudi, 1957.
[5] Arnold V.I., Mathematical Methods of Classical Mechanics, Springer Verlag, 1978.
[6] Atkinson K.E.,An Introduction to Numerical Analysis, Wiley & Sons, 1989.
[7] Bloembergen N., Nonlinear Optics, Benjamin, 1965.
[8] Bossavit A., Emson C., Mayergoyz I.D., Méthodes numeriques en électromagnétisme,
Eyrolles (1991). [NON CITATO @@]
[9] Bossavit A., “A rationale for edge-elements in 3-D fields computations”. IEEE Trans.
on Magnetics, v.24, n.1, (1988)
[10] Bottani E., ..............
[11] Bourgin D. G., Modern Algebraic Topology, The MacMillan Company, 1963.
[12] Branin F. H. (Jr), “The algebraic topological basis for Network analogies and the vector
calculus”, Symp. on Generalized Networks, Brooklyn Polit., pp. 453-487, (1966).
[13] Callen H.B., Thermodynamics, Wiley, 1961.
[14] Cartan E., “Sur le varietès a connexion affine”, Ann. Ecole Norm. 41, 1 (1924).
[15] Cavendish J.C. Hall C.A., Porsching T.A., “A complementary volume approach for
modelling three-dimensional Navier-Stokes equations using dual Delaunay/Voronoi
tessellations”, J. Num. Meth. Heat Fluid Flow., vol. 4, 329-345, (1994).
[16] Chowlson, O.D., Davaux, E., Cosserat, E. “Traité de physique” / O.D. Chwolson
; ouvrage traduit sur les éditions russe & allemande par E. Davaux. - éd. revue et
considérablement augmentée par l’Auteur, suivie de notes sur la physique théorique /
par E. Cosserat, F. Cosserat. - Paris : Hermann, 1906-28 02/01/001(I-V, S.I-II)
185
186
BIBLIOGRAFIA
[17] Cullwick, E.G., , “The fundamentals of electro-magnetism”, 3rd ed. - Cambridge
University press, (1966).
[18] de Groot S.R. and Mazur P. , Non-Equilibrium Thermodynamics, reprinted by Dover
1984.
[19] Deschamps G.A., “Electromagnetics and Differential Forms”, Proceeding of the IEEE ,
vol. 69, No.6, pp. 676-696, (1981).
[20] Deschamps G.A., Ziolkowski R.W., “Comparison of Clifford and Grassmann Algebras
in Applications to electromagnetism”, contained in Cliffor dalgebras and their Applications in Mathematical Physics, edited by. J.S.R.Chisholm and A.K. Common, Reidel
Publ Comp. , pp. 501-515, 1986.
[21] Demidovic B.P., Maron I.A.,Fondamenti di calcolo numerico, Mir, 1981.
[22] Dubrovin B. A., Novikov S. P., Fomenko A. T., Geometria Contemporanea, (italian
translation from russian) v. 3, Mir, 1989.
[23] Fleury P., Mathieu J. P., Elettrostatica, Corrente continua, magnetismo, Zanichelli vol.
6, 1970.
[24] Fouillé A., Electrotecnique a l’usage des ingenieurs, Dunod, 1961.
[25] Franz W., Algebraic topology, Ungar Publ. Co., 1968.
[26] Guggenheim E.A., Termodinamica, Einaudi, 1952 (translation of Thermodynamics,
North Holland)
[27] Hallen E., Electromagnetic Theory , Chapman&Hall, 1962.
[28] Helmholtz von H., “Ueber die Erhaltung der Kraft”, Wissenchaftliche Abhandlungen,
I, pp.12-75 , Berlin (1847).
[29] Hilton P.J. - Wylie S., Homology theory, Cambridge Univ. Press, 1965.
[30] Hocking J. G. - Young G. S., Topology, Addison Wesley, 1961.
[31] Jackson J.D., Classical Electrodynamics,Wiley & Sons .
[32] Jefimenko O. D., Electricity and Magnetism, Appleton-Century-Crofts 1966.
[33] Kron G.,“ Equivalent circuits of the field equations of Maxwell”, Proc. IRE ,32,1944,
289-299.
[34] Kron G., “The Frustrating Search for a Geometrical Model of Electrodynamic
Networks,” Tensor , 13, pp.111-128, 1963
BIBLIOGRAFIA
187
[35] Langevin P., “Sur la nature des grandeurs et les choix d’un système d’unités
électriques”, Bull. Soc. française de physique, (1922), v. 164, p.9. Reprinted in Oeuvres
scientifiques de Paul Langevin, Centre Nationale de la Recerque Scientifique, 1950, pp.
493-505.
[36] Langevin P., “Sur les grandeurs champ et induction”, Bull. Soc. Francaise de physique, (1921), v. 162, p.3. Reprinted in Oeuvres scientifiques de Paul Langevin, Centre
Nationale de la Recerque Scientifique, pp. 491-492, 1950. [CITARE @@]
[37] Lefschetz S.,Introduction to Topology, Princeton Univ Press, 1949.
[38] Marrone M., Computational Aspects of Cell Method in Electrodynamics, submitted
for publication.
[39] Maxwell J. C., Remarks on the Mathematical Classification of Physical Quantities,
Proc. London Math. Soc., 3, 1871, pp.224-232.
[40] Maxwell J. C., Treatise of Electricity and Magnetism, ...., 1873.
[41] Maxwell J. C., Traité Eléméntaire d’electricité, Gauthier Villars, 1884.
[42] Maxwell J. C., Trattato di elettricità e magnetismo, Utet, 1973.
[43] Mie G.,Lehrbuch der Electrizität un des Magnetismus, 2nd edition; Enke,Stuttgart,
1941.
[44] Mie G., Handbuck der Experimentalphysik , band XI, Elektrodynamik, 1932.
[45] Okada S., Onodera R., “Algebrification of Field Laws of Physics by Poincaré Process”,
Bull. of Yamagata University Natural Sciences, 1, 4, p. 79-86, (1951).
[46] L. Olivieri, E. Ravelli, Elettrotecnica, vol. I, Cedam, 1983.
[47] Patterson E. M., Topology, Oliver and Boyd Ltd., 1966.
[48] Pauli W., Elettrodinamica, (translation of Vorlesung Elektrodynamik ), ed. Boringhieri,
1964.
[49] Penfield P., Hans H., Electrodynamics of moving media, M.I.T. Press, 1967.
[50] Perucca E., Fisica generale e sperimentale, v.2, IV edizione, Unione Tipografica
Editrice Torinese, 1945.
[51] Pohl R. W., Physical principles of Electricity and Magnetism, Blackie and Son, 1930.
[52] Pohl R.W., Elementi teorico-pratici di elettrofisica moderna, Hoepli, 1928.
[53] E.J. Post, Geometry and Physics: A Global Approach, Burge (ed.), Problems in the
Foundation of Physics, 4 (Springer-Verlag, 1971).
188
BIBLIOGRAFIA
[54] Post E.J., “Kottler-Cartan-van Dantzig (KCD) and Noninertial Systems”, Found. of
Phys. vol.9, pp.619-640, 1978
[55] Rojansky V., Electromagnetic fields and Waves, Dover. ................
[56] Schelkunoff S. A., Electromagnetic Fields, Blaisdell, 1963.
[57] Schwartz M., Principles of Electrodynamics, Dover .
[58] Someda G., Elementi di elettronica generale, Editrice Universitaria Pàtron, ♣
[59] Sommerfeld A., Lectures in Theoretical Physics, vol. III, Electrodynamics, Academic
Press, 1952.
[60] Silvester P., “Finite Element Solution of Homogeneous Waveguides Problems”, Alta
Frequenza, v.38, pp.313-317 (1969).
[61] Tamm I.E., Fundamentals of the Theory of Electricity, Mir, 1979.
[62] Tonti E., On the mathematical structure of a large class of physical theories, Rend.
Acc. Lincei, vol. LII, pp. 48-56, (1972).
[63] Tonti E., “A mathematical model for physical theories”, Rend. Acc. Lincei , vol. LII,
pp. 175-181 (I part), pp. 350-356 (II part), (1972).
[64] Tonti E., “On the Geometrical Structure of Electromagnetism”, in Gravitation, Electromagnetism and Geometrical Structures, for the 80th birthday of A. Lichnerowicz,
Edited by G. Ferrarese, (1995), Pitagora Editrice Bologna, pp. 281-308.
[65] Tonti E., “The reasons for Analogies between Physical Theories”, Appl. Mat.
Modelling, Vol. I, pp. 37-50 (1976).
[66] Tonti E., “The Algebraic - Topological Structure of Physical Theories”, Conference on
Mechanics, Calgary (Canada) (1974).
[67] Tonti E., “On the Formal Structure of Physical Theories”, monograph of the Italian
National Research Council (1975).
[68] Tonti E., “Algebraic Topology and Computational Electromagnetism”, Fourth International Workshop on the Electric and Magnetic Fields: from Numerical Models to
Industrial Applications, Marseille, (1998), pp. 284-294.
[69] Tonti E., “Finite Formulation of the Electromagnetic Field”, Journal of Electromagnetic Waves and Applications/ Special issue of the Progress in Electromagnetic Research
(PIER) Monograph Series , Geometrical Methods for Computational Electromagnetics,
(invited paper in press).
[70] Veblen O., Whitehead J. H. C., The foundations of Differential Geometry, Cambr.
Tracts No 29, pp. 55-56, 1932.
BIBLIOGRAFIA
189
[71] Van Dantzig D., “Electromagnetisms, independent of metrical geometry”, Proc.
Amsterdam Acad. 37 (1934) pp. 521-525 pp. 526-531, pp. 643-652, pp. 825-836.
[72] Van Dantzig D., “On the phenomenological thermodynamics of moving matter”,
Physica VI, 8, pp. 673-704 (1939).
[73] Van Dantzig D., “On the Geometrical Representations of Elementary Physical Objects
and the Relations between Geometry and Physics”, Nieuw Arcjief von Wiskunde, v.3,
n.2, pp. 73-89 (1954).
[74] Wallace A. W., An Introduction to Algebraic Topology, Pergamon Press, 1967.
[75] Wallace A. W., Algebraic Topology, Homology and Cohomology, Benjamin, 1970.
[76] Weiland T., “Eine Methode zur Lösung der Maxwellschen Gleichungen für
sechskomponentige Felder auf diskreter Basis”, AEÜ, band 31, Heft 3, (1977).
[77] Weiland T., “On the numerical solution of Maxwell’s equations and applications in the
field of accelerator physics”. Particle accelerators, pp. 245-292 (1984).
[78] Weiland T.,“ On the unique numerical solution of maxwellian eigenvalue problems in
three dimensions”. “Particle accelerators”, pp. 227-242, (1985).
[79] Weiland T., “Time domain electromagnetic field computation with finite difference
methods”, Int. J. of Num. Modelling, v.9, , pp. 295-319 (1996).
[80] Whittaker E., A History of the Theories of Aether and Electricity, v.2, Humanities
Press, 1973.
[81] Yee K. S., “Numerical Solution of Initial Boundary Value Problems Involving Maxwell’s
Equations in Isotropic Media”, IEEE Trans. Antennas Propag. 14, pp. 302-307 (1966).
[82] Yee K. S., “Impedance Boundary Conditions Simulation in the FDTD/FVTD Hybrid”,
IEEE Trans. Antennas Propag. vol. 45,N. 6, pp. 921-925 (1997).
[83] Zavattini E., Studi sperimentali specifici, su effetti dovuti alla polarizzazione del vuoto
del campo elettromagnetico che si riconducono .... ♣, Dipartimento di Fisica di Trieste,
1995.