SCHEMI DI MISURE OTTICHE DI PRECISIONE
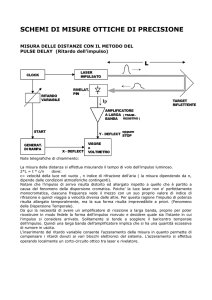
MISURA DELLE DISTANZE CON IL METODO DEL
PULSE DELAY (Ritardo dell’impulso)
L
LASER
IMPULSATO
CLOCK
RITARDO
VARIABILE
RIVELAT.
PIN
Ip
TARGET
RIFLETTENTE
AMPLIFICATORE
A LARGA ( TRANS RESISTIVO )
BANDA
START
GENERAT.
DI RAMPA
oppure
Y - DEFLECT STOP
X - DEFLECT
VISORE
o
VOLTMETRO
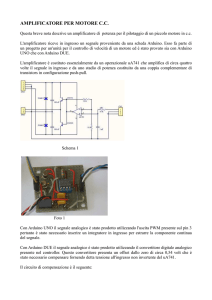
Note telegrafiche di chiarimento:
La misura della distanza si effettua misurando il tempo di volo dell’impulso luminoso.
2*L = t * c/n
dove:
c= velocità della luce nel vuoto , n indice di rifrazione dell’aria ( la misura dipendendo da n,
dipende dalle condizioni atmosferiche contingenti).
Notare che l’impulso di arrivo risulta distorto ed allargato rispetto a quello che è partito a
causa del fenomeno della dispersione cromatica. Poiche’ la luce laser non e’ perfettamente
monocromatica, ciascuna frequenza vede il mezzo con un suo proprio valore di indice di
rifrazione e quindi viaggia a velocità diversa dalle altre. Per questa ragione l’impulso di potenza
risulta allargato temporalmente, ma la sua forma risulta imprevedibile a priori. (Fenomeno
della Dispersione Temporale).
Da qui la necessità di avere un amplificatore di ricezione a larga banda, proprio per poter
ricostruire in modo fedele la forma dell’impulso ricevuto e decidere quale sia l’istante in cui
l’impulso si considera arrivato. Solitamente si tende a scegliere il baricentro temporale
dell’impulso. Quindi una larga banda dell’amplificatore implica che si ha una quantità eccessiva
di rumore in uscita.
L’inserimento del ritardo variabile consente l’azzeramento della misura in quanto permette di
compensare i ritardi dovuti ai vari blocchi elettronici del sistema. L’azzeramento si effettua
operando localmente un corto-circuito ottico tra laser e rivelatore.
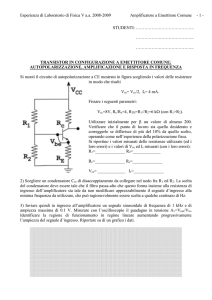
MISURA DELLE DISTANZE CON IL METODO DEL PHASE SHIFT
(Ritardo di fase)
L
GEN. SINUSOIDALE
A RADIOFREQUENZA
ωm
LASER MODULATO
IN AMPIEZZA
RITARDO
VARIABILE
RIVELAT.
PIN
TARGET
RIFLETTENTE
Ip
AMPLIFICATORE
SELETTIVO a RADIOFR.
( TRANS - RESISTIVO )
SEGNALE
DI ARRIVO
SEGNALE DI
RIFERIMENTO
DISCRIM. DI
FASE
Φ
In questa altra applicazione la luce è modulata in ampiezza con una radiofrequenza a
pulsazione ωm.
Il filtro di ricezione è ora di tipo passa-banda selettivo centrato sul valore di ωm.
La misura si effettua misurando la rotazione di fase Φ subita dal segnale modulante nel viaggio
andata e ritorno. Il metodo è ancora sensibile all’indice di rifrazione e quindi alle condizioni
atmosferiche.
Φ = n Ko 2 L = n 4 π L / λo = n 2 L ωm / c
per cui
L = (c / 2 n) * (Φ / ωm).
Il difetto del sistema è l’uso del discriminatore di fase il quale è uno strumento intrinsecamente
poco preciso. Esso possiede una incertezza nella misura (risoluzione) fissa ∆Φ. L’errore indotto
sulla distanza (∆L) e’ inversamente proporzionale alla pulsazione usata.
Altro problema. Il discriminatore di fase non percepisce quando Φ ha subito delle rotazioni
intere di angolo giro; ovvero il risultato fornito è sempre il resto della divisione tra Φ / 2 π.
La misura della distanza è in pratica sempre il resto della divisione tra 2 L / (λo/n).
Per queste due ragioni non si può effettuare una misura usando soltanto una pulsazione fissa,
bensì si usa un insieme di valori di pulsazioni aventi diverse lunghezze d’onda. Per ogni misura
si acquisisce soltanto la cifra piu’ significativa del risultato.
Esempio:
Pulsazione
ω1
ω2
ω3
ω4
ω5
2 L da misurare = 345,26 m
Lunghezza d’onda
1000 m
100 m
10 m
1m
10 cm
Cifre del display
3XXXX
4XXXX
5XXXX
2XXXX
6XXXX
Conoscenza della distanza
3XX,XX m
34X,XX m
345,XX m
345,2X m
345,26 m
MISURA DELLE LUNGHEZZE CON IL METODO DELL’INTERFEROMETRO
DI MICHELSON
SPECCHIO M2
( fisso )
B
A
L2
LUNGHEZZA DA MISURARE
SPECCHIO M3
( mobile )
L3
LASER COERENTE
Spostamento
GENERATORE DI
RAMPA
L1
SPECCHIO M1
(semiriflettente)
L4
MOTORE
X - DEFLECT
RIVELATORE
PIN
Y - DEFLECT
AMPLIFICATORE
PASSA BASSO
( trans-resistivo)
VISORE
La figura mostra lo schema ottico ed elettrico di un sistema che consente di misurare le
lunghezze con precisione micrometrica sfruttando il fenome dell’interferenza della luce
coerente monocromatica (ovvero i cui fotoni sono caratterizzati da un’unica lunghezza d’onda.
Lo specchio semiriflettente M1 divide il fascio luminoso proveniente dal laser in due fasci che si
ricongiungono sul rivelatore di luce PIN, il quale misura la potenza ottica incidente.
Il primo fascio luminoso percorre lo spazio pari a
L1+L4
Il secondo fascio, che si riflette totalmente sullo specchio mobile M3
e sullo specchio fisso M2, percorre in totale uno spazio pari a
L1+2*L3+2*L2+L4
I due fasci di luce si ricongiungono sul rivelatore avendo percorso cammini dissimili la cui
differenza è DL = 2*(L2+L3). Per questo il campo elettrico del secondo fascio risulta sfasato
rispetto a quello del primo dell’angolo F pari alla rotazione di fase subita nel surplus di
percorso.
Φ=n*Ko*∆L = n*(2π/λο)*2*(L2+L3)
Si noti che se F è un multiplo pari di p, i due fasci si ricongiungono in fase, i campi elettrici si
sommano aritmeticamente ( se la polarizzazione dei due fasci è la stessa) ed il segnale sul
rivelatore è massimo. Se F è un multiplo dispari di p, i due fasci di luce hanno il campo
elettrico in controfase, per cui i campi elettrici tendono a sottrarsi aritmeticamente elidendosi a
vicenda. In questo caso il segnale sul rivelatore è minimo, (nullo se le ampiezze e le
polarizzazioni fossero esattamente uguali).
Dal punto di vista analitico si può
rivelatore PIN nel modo seguente,
per i due fasci.
I campi elettrici dei due fasci sul
fase quella del primo fascio.
A cos(ω t)
A cos(ω t + Φ)
Ip =
vedere quanto detto calcolando il segnale di corrente Ip sul
ammettendo che le ampiezze dei campi elettrici siano uguali
rivelatore siano i seguenti, prendendo come riferimento di
per il fascio 1
per il fascio 2
R *P = R *[A cos(ω t) + A cos(ω t
+ Φ)]2 =
P=potenza dei due fasci insieme
R =responsivity del PIN
=
R * (A2 cos2(ω t) + A2 cos2(ω t + Φ) +2A2*cos(ω t)*cos(ω t + Φ)) =
R
=
* [(A2/2) + (A2/2)*cos2(2ω t) + (A2/2) + (A2/2)*cos2(2ω t+ 2Φ) +
2
+ A cos(2ω t + Φ) + A2cos(Φ)]
Eliminando i termini a frequenza ottica doppia, tagliati dalla risposta stessa del PIN, il segnale
di corrente ha la forma seguente che tende ad oscillare tra un massimo ed un minimo al
variare dell’angolo Φ:
Ip =
R *[(A2/2) + (A2/2) + A2cos(Φ)] = R *A2*[1+cos(Φ)].
Facendo riferimento allo schema in figura, in cui un oscilloscopio visualizza il segnale sul PIN in
funzione della posizione dello specchio mobile M3, se lo specchio M3 si sposta di DX, e’ facile
vedere che la differenza di fase tende ad aumentare della quantità ∆Φ.
∆Φ=n*Ko*2*DX= n*(2π/λο)*2*DX
per cui si ha che per avere un passaggio da un massimo del segnale di corrente al massimo
successivo M3 si deve spostare di λο/2n , ovvero di mezza lunghezza d’onda. La distanza tra
un massimo ed un minimo del segnale corrisponde a un quarto della lunghezza d’onda.
La misura dell’intera lunghezza L si fa facendo scorrere lo specchio M3 fino a fine corsa e
contando il numero di massimi e minimi del segnale di corrente (di fatto corrispondenti alle
frange di interferenza tra i due segnali).
Se utilizzo una luce infrarossa con 0.8 microns di lunghezza d’onda posso quindi operare una
misura della lunghezza L con la risoluzione di 0.2 microns !
MISURA DELLE VELOCITA’ LINEARI E DELLA POSIZIONE CON IL
METODO DELLE FREQUENZE DI BATTIMENTO (EFFETTO DOPPLER)
SPECCHIO M2
( fisso )
L2
L1
SPECCHIO M3
( mobile )
L3
LASER COERENTE
Velocità V
L4
RESET
CONDIZIONI
INIZIALI
SPECCHIO M1
(semiriflettente)
CONVERTITORE
FREQUENZA TENSIONE
RIVELATORE
PIN
AMPLIFICATORE
PASSA BASSO
( trans-resistivo)
FILTRO
INTEGRATORE
V1 = MISURA
DI VELOCITA'
V2 = MISURA
DI POSIZIONE
Lo stesso interferometro di Michelson, montato nella configurazione riportata nella figura può
essere utilizzato per la misura delle velocità lineari. Nello schema riportato, lo specchio M3 si
allontana o si avvicina alla sorgente con velocità costante v.
Questa misura sfrutta l’effetto Doppler ottico. Se una superficie riflettente, illuminata dalla luce
di frequenza ν, si allontana dalla sorgente con velocità costante, la frequenza dell’onda riflessa
diminuisce rispetto a ν di una quantità che dipende dal rapporto tra la velocità di
allontanamento v e la velocità della luce. Dualmente, la frequenza dell’onda riflessa aumenta
della stessa quantità se lo specchio si avvicina alla sorgente. Ragionando in termini di
lunghezza d’onda, se lo specchio si allonta la lunghezza d’onda si sposta verso il rosso (red
shift) e si sposta verso il blu se si avvicina (blu shift).
Per la cronaca il red shift rilevato sugli spettri luminosi delle stelle lontane costituisce una
prova che l’universo è attualmente in espansione.
Lo spostamento in frequenza ∆ν ha quindi la seguente formula, essendo νο la frequenza
dell’onda incidente:
∆ν =
± νο (v / c) *(1- v2/C2)-1/2 ≈ = ± νο (v / c)
Tornando allo schema dell’interferometro, si vede che sul rivelatore arrivano due onde: una a
frequenza νο, l’altra a frequenza νο±∆ν. Quindi la fotocorrente di uscita dal rivelatore dipende
dalle potenze di due onde a pulsazione diversa: ωο e ωο±∆ω.
Ip =
R *P = R *[A cos(ωο t) + A cos((ωο±∆ω) t)]2
Sviluppando il quadrato della somma ed eliminando i termini a frequenze ottiche, il segnale in
corrente che si ottiene è il seguente.
Ip =
R *P = R *[A2 + A2 cos(±∆ω t)]
Si ha quindi che la fotocorrente è composta da un termine costante nel tempo e da un termine
cosinusoidale a frequenza pari alla frequenza di battimento tra le due. Tale frequenza è quella
che contiene l’informazione sulla velocità.
Se si elimina il termine costante e si invia il segnale in un convertitore frequenza-tensione (in
ingresso una frequenza, in uscita una tensione proporzionale alla frequenza), ecco che ho
convertito la velocità dello specchio M3 in informazione di tensione, secondo un certo fattore di
proporzionalità. Tuttavia, essendo il coseno una funzione pari, in questo modo si perde la
cognizione del segno, ovvero non si sa se lo specchio si allontana o si avvicina. Questo
problema si risolve introducendo uno sfasamento di π/2 tra le onde ricevute dal rivelatore in
modo da ottenere una fotocorrente Ip pari a :
Ip =
R *P = R *[A2 + A2 sen(±∆ω t)]
Una volta che si è ricuperata l’informazione sul segno (e quindi sul verso dello spostamento) è
possibile costruire un registratore di spostamento semplicemente integrando, mediante un
integratore elettronico, la tensione proporzionale alla velocità. La posizione iniziale di
riferimento può essere impostata azzerando l’uscita dell’integratore, ovvero cortocircuitando la
capacità di reazione.
Il misuratore ottico di velocità è il dispositivo su cui si basa il temuto Autovelox in dotazione
alla polizia stradale.
MISURA DELLE VELOCITA’ ANGOLARI E DELLA POSIZIONE ANGOLARE
CON IL METODO DELLE FREQUENZE DI BATTIMENTO
N (>1000) SPIRE
DI FIBRA OTTICA
ω m = Velocità angolare di rotazione
intorno all'asse centrale
ONDA LUMINOSA
ANTI-ORARIA
ONDA LUMINOSA
ORARIA
ωm
R
DIRAMATORI
DI POTENZA
(GIUNTI A Y)
LASER AD
ANELLO
BIDIREZIONALE
SFASATORE
DI
AMPLIFICATORE
OTTICO A SEMICOND.
π /2
ONDA LUMINOSA
ORARIA
ONDA LUMINOSA
ANTI-ORARIA
RIVELATORE
PIN
RESET
CONDIZIONI
INIZIALI
CONVERTITORE
FREQUENZA TENSIONE
f ---> V
AMPLIFICATORE
PASSA BASSO
( trans-resistivo)
FILTRO
INTEGRATORE
V1 = MISURA
DI VELOCITA'
ANGOLARE
V2 = MISURA
DI POSIZIONE
ANGOLARE
La misura delle velocità angolari con risoluzione elevatissima può essere realizzata ugualmente
sfruttando l’effetto Doppler ottico ed un laser ad anello.
Il laser ad anello è l’equivalente fotonico di un oscillatore elettronico in classe A ed il suo
funzionamento ricalca esattamente quello del circuito elettronico. Il Laser è composto da un
amplificatore ottico, che realizza il guadagno della potenza ottica tra ingresso ed uscita, ed una
reazione positiva che riporta in ingresso all’amplificatore parte della potenza ottica generata.
La reazione è realizzata con uno spezzone di fibra ottica circolare collegata ad uno dei rami in
uscita di un accoppiatore ad Y.
Poiché il sistema possiede una simmetria la luce laser coerente generata a frequenza νo, si
propaga in entrambi i versi di percorrenza della fibra, in senso orario ed in senso antiorario.
Si ricordi che la luce viaggia sempre in un sistema di riferimento solidale con le stelle fisse. I
due accoppiatori ad Y convogliano parte delle due onde su un rivelatore di luce.
Ora il laser ad anello (di raggio R) ha il centro coincidente con il centro di rotazione di un
sistema meccanico che ruota sul proprio asse con una pulsazione angolare ωm.
Se l’intero sistema è fermo le due onde arrivano sul rivelatore con la stessa frequenza νo.
Se il sistema ruota con pulsazione angolare ωm, ad esempio in senso antiorario, la luce che si
propaga in questo verso vede l’amplificatore ottico che tende a fuggire in avanti, mentre la
luce oraria vede l’amplificatore venirgli incontro. Questo vuol dire che entrambe le luci
subiscono l’effetto Doppler ottico in senso opposto: la frequenza ottica diminuisce per l’onda
antioraria ed aumenta per l’onda oraria.
L’entità dello scostamento in frequenza è sempre proporzionale al rapporto tra la velocità
meccanica periferica e la velocità della luce. Ovvero
∆ν =
± νο (ωm R / c)
Come si vede, lo scostamento in frequenza dipende dal raggio R. Per aumentare quindi la
sensibilità dello strumento alla pulsazione angolare dovrei fare un R molto grande, cosa che
comporterebbe l’aumento delle dimensioni dell’oggetto. Per questo si preferisce aumentare R
in modo fittizio aumentando il numero N delle spire di fibra ottica avvolte. Per cui:
∆ν =
± νο (ωm R N / c).
La foto-corrente Ip del rivelatore, sempre eliminando i contributi a frequenza ottica e tenuto
conto dello sfasamento di π/2 introdotto su uno dei due fasci luminosi, possiede un termine
modulato da un seno alla frequenza di battimento tra le due onde luminose, ovvero al doppio
dello scostamento di frequenza dovuto all’effetto Doppler ottico.
Ip =
R *P = R *[A2 + A2 sen(±2∆ω t)]
Il segno definisce il verso (orario o antiorario) della rotazione meccanica.
Analogamente al sistema precedente, la conversione da frequenza a tensione del segnale
sinusoidale consente di avere una misura in tensione della velocità di rotazione meccanica.
Integrando ulteriormente questo segnale, si ha un segnale proporzionale allo spostamento
angolare rispetto ad un dato riferimento di orientamento.
Date le ridotte dimensioni delle fibre ottiche attuali, l’intero strumento di misura è contenuto in
una scatola non più grande del tipico contenitore per il lucido da scarpe.
Questi strumenti di misura vengono attualmente impiegati come bussole di precisione nei
veicoli moderni, oppure , montati a gruppi di tre in posizione ortogonale tra di loro, possono
funzionare da giroscopi di precisione.