CLASSIFICAZIONE
Si tratta di una tecnica di rilievo che consente di ottenere forma, dimensioni e
posizione (modello digitale) degli oggetti mediante la misura, in brevi intervalli di
tempo, di un elevatissimo numero di punti (svariati milioni in relazione alle
ampiezze rilevate e al passo di scansione imposto) appartenenti alla superficie
degli stessi oggetti, utilizzando appositi strumenti noti come laser scanner.
Gli strumenti scanner laser possono essere classificati in base alla tecnologia utilizzata per la
misura della distanza:
• triangolazione ottica: la distanza dei punti sull’oggetto viene ricavata per triangolazione
essendo nota la distanza, interna allo strumento, tra l'apparato emettitore e quello
ricevitore del raggio laser, oltre ai due angoli adiacenti ad essa;
• comparazione di fase: viene confronta la fase dell’onda del raggio laser emesso con
quella dell’onda riflessa per misurare la distanza dell’oggetto;
• misura del tempo di volo (TOF: time of flight): viene utilizzato un impulso laser di breve
durata del quale si misura l’intervallo di tempo di andata e ritorno (detti LIDAR);
e in base alla piattaforma impiegata:
• piattaforma fissa : per rilievi terrestri sia dei fabbricati sia del territorio;
• piattaforma mobile : su aereo o elicottero per il rilievo del territorio.
william meschieri
2
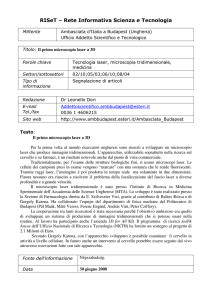
IL DIODO LASER
Qualsiasi sia la tecnologia impiegata, essa prevede
l’impiego di un diodo laser in grado di generare un
opportuno segnale laser. Si tratta di un componente
elettronico che converte un segnale elettrico in un
segnale luminoso monocromatico.
breve impulso di corrente a 20Amp
specchio a
riflessione totale
specchio a
riflessione parziale
lente
segnale
ottico
in uscita
semiconduttore
Ga-As tipo “p”
GENERATORE
ELETTRONICO
di IMPULSI
regione attiva
s=1µm
semiconduttore
Ga-As tipo “n”
william meschieri
lunghezza
cavità 1mm
distanza focale100mm
3
SCANNER A TRIANGOLAZIONE
Il principio di funzionamento si basa sulla
conoscenza esatta della distanza ‘b’ tra lo specchio
che dirige il segnale sull’oggetto e la posizione
dell’eco sul sensore CCD ricevente il segnale riflesso
dall’oggetto. Lo schema è il seguente:
1. un raggio laser indirizzato da uno specchio
rotante colpisce il bersaglio e viene riflesso (in
modo diffuso);
2. il punto colpito viene messo a fuoco da lenti su
un sensore CCD (che trasforma impulsi luminosi
in impulsi elettrici);
3. in base alla distanza ‘b’ e agli angoli connessi al
raggio emesso e riflesso si può determinare la
distanza del bersaglio.
Caratteristiche:
• Precisione : fino al millimetro
• Portata : brevi distanze (20÷100m max)
• Utilizzo : limitato al rilievo dei fabbricati e
manufatti
william meschieri
superficie del sensore
specchio
rotante
b
diodo
laser
sensore
CCD
lente
D
oggetto
4
SCANNER A TOF (o LIDAR)
Un diodo laser trasforma un successione d’impulsi in un segnale luminoso che viene
indirizzato sull’oggetto da rilevare (targhet) da specchi rotanti o oscillanti, e da esso poi
riflesso (eco o risposta). Parte dell’eco del segnale ritorna allo strumento e colpisce un
sensore fotosensibile che lo trasforma in un segnale elettrico. L’intervallo di tempo (TOF:
time of flight) fra l’impulso trasmesso e quello ricevuto consente di risalire alla distanza
strumento-punto sull’oggetto.
Questi strumenti consentono la misura, non solo
della distanza, ma anche
dell’intensità con cui è
“tornato” il segnale laser,
fornendo indicazioni preziose in merito al tipo di
materiale colpito.
Caratteristiche:
• Precisione : al centimetro
• Portata : medie distanze (2000m max)
• Utilizzo : rilievo del territorio e dei fabbricati
william meschieri
5
TECNICA DI SCANSIONE
Questi strumenti sono dotati di dispositivi motorizzati di scansione sia in senso
azimutale (di fatto a 360°) e zenitale (fino a ±80° rispetto all’orizzontale), che
permettono di rilevare con continuità gli oggetti della scena interessata, fornendo
le coordinate di una maglia regolare di punti (numerosissimi) che definiscono
forma, dimensioni e posizione degli oggetti ripresi.
Le informazioni acquisite dallo
strumento (distanza, direzione
azimutale e zenitale ) consentono
al software di fornire il posizionamento spaziale (X,Y,Z) di ogni punto
dell'oggetto.
Per ogni punto, il sistema fornisce
anche l'intensità radiometrica del
segnale riflesso che consente di
valutare le caratteristiche dei materiali costituenti l’oggetto sotto
diversi aspetti.
william meschieri
6
DISPOSITIVI DI INDIRIZZAMENTO
Il raggio laser viene indirizzato sull’oggetto per mezzo di meccanismi a specchi
poligonali rotanti oppure oscillanti che, al variare degli angoli azimutale e zenitale,
consentono di indirizzare il raggio luminoso laser in modo da ‘coprire’ via via tutto
l’oggetto rilevato (allo stesso modo con cui il raggio di uno scanner o una
fotocopiatrice indaga l’immagine cartacea da riprodurre), avanzando per punti
contigui disposti, come detto, su un grigliato che interessa tutto l’oggetto rilevato.
La rotazione degli specchi viene
regolata dall’operatore per la scansione in funzione della risoluzione
che si desidera ottenere; ciò crea la
spaziatura (gap) del reticolo di
punti rilevati sull’oggetto formando
delle nuvole di punti che coprono
l'intera superficie dello stesso
oggetto scansionato.
william meschieri
7
DISPOSITIVI DI INDIRIZZAMENTO
SPECCHIO OSCILLANTE
(3, 4, 6 facce)
william meschieri
SPECCHIO POLIGONALE ROTANTE
(3, 4, 6 facce)
8
SCHEMA DI UN LASER SCANNER
Un laser scanner di fatto è un sistema integrato che comprende le seguenti componenti:
1.
2.
3.
4.
5.
un misuratore di distanza a impulsi (telemetro laser);
un sistema ottico (specchi) di scansione;
unità di calcolo (computer e software);
dispositivi di memorizzazione delle misure;
una camera digitale per
l’acquisizione di una
documentazione visiva
delle zone rilevate;
6. un sistema inerziale
(IMU) che utilizza giroscopi di tipo ottico e
accelerometri (solo per
rilievo da piattaforma
aerea);
7. un ricevitore GPS (necessario da piattaforma
aerea, opzionale per
quella terrestre).
william meschieri
9
LA DIVERGENZA DEL SEGNALE
Il segnale luminoso laser propagandosi,
per effetto della dispersione di energia in
funzione della distanza D (nonostante la
sua natura monocromatica), forma una
sorta di cono, generando una superficie
d’impatto (spot) sull’oggetto che non è
mai puntiforme e adimensionale, ma
marca l’oggetto con un’impronta (cella di
risoluzione o laser spot).
Il diametro d di questa impronta
dipende dall’angolo di apertura del cono,
detto divergenza (beam divergence), e
dalla distanza dell'oggetto. Questo
valore, in generale, è compreso tra 0,25 e
3,0 mrad (1 mrad=10-3rad).
Es. un valore di 0,5 mrad, e per una distanza di 800m, l’impronta dell'impulso laser
sull’oggetto ha le seguenti dimensioni:
d = 0,0005×800 = 0,40m = 40cm
william meschieri
10
LA RISOLUZIONE SULL’OGGETTO
L’impronta del raggio laser sull’oggetto è molto
importante in particolare nel rilievo su piattaforma aerea
perché condiziona molte caratteristiche dello strumento
laser scanner, tra cui la possibilità di:
•Individuare piccoli particolari;
•utilizzare i varchi nel fogliame della vegetazione per
raggiungere il suolo.
La spaziatura del reticolo di punti rilevati sull’oggetto è
regolata dalla rotazione degli specchi (risoluzione
angolare: 0°,1÷0°,2). Dato che il valore minimo
dell'angolo di apertura del cono generato dal raggio laser
(0,25mrad) è decisamente minore della risoluzione
angolare, ne consegue che vi sono porzioni di oggetto
non investigate con possibile perdita di informazioni.
Per ovviare a questo inconveniente è possibile
aumentare l'angolo di
apertura del cono fino a
uguagliare la risoluzione angolare (3mrad) coprendo
integralmente l'oggetto .
william meschieri
11
LA MISURA BASATA SUL TOF
La tecnologia TOF si basa sulla misura
del tempo di volo ∆t di un impulso laser,
ossia l’intervallo che intercorre tra
l’emissione dell’impulso e il suo ritorno,
misurato tramite un orologio con una
frequenza stabilizzata al quarzo, che
consente di ricavare la lunghezza del
vettore (modulo) che va dal centro dello
strumento al punto rilevato (dunque la
distanza D strumento-punto di riflessione
sull’oggetto):
c ⋅ ∆t
D=
2
D = distanza di presa in metri
∆t = tempo di volo dell’impulso laser (andata e ritorno) in secondi
c = velocità della luce in metri al secondo (2,9979 ×108 m/s)
william meschieri
12
IL POSIZIONAMENTO DEI PUNTI
Oltre alla misura della
distanza D, lo strumento
effettua anche le misure
angolari di precisione θ e ϕ
(azimutale e zenitale), connesse al movimento rotatorio
degli specchi rotanti o oscillanti, che, con una opportuna
spaziatura angolare (0°,10÷
0°,20) tra i differenti punti
rilevati (risoluzione angolare),
genera il grigliato di punti
rilevati sull’oggetto prima descritto.
La distanza D, gli angoli θ e ϕ, unitamente alla conoscenza delle coordinate del
centro del telemetro laser, consentono al sistema di ottenere le coordinate
cartesiane X, Y, Z (posizione 3D) dei punti corrispondenti a ogni misura (che sono
numerosissimi in brevi intervalli di tempo) .
william meschieri
13
LA RIFLETTANZA DEGLI OGGETTI
La precisione dei sistemi laser scanner
è direttamente influenzata dalla qualità
del dispositivo interno che misura il
tempo di volo dell’impulso laser, ma
anche dalla riflettanza dei target (grado
di riflettività della superficie colpita), in
quanto in relazione al tipo di materiale,
l’eco (impulso di ritorno) assume, come
già detto, una diversa intensità.
Inoltre il sistema registra anche
l’intensità della risposta (cioè del segnale
riflesso) fornendo informazioni sulla
natura dal materiale di cui è costituito
l’oggetto rilevato (che condiziona la sua
riflettività) .
william meschieri
Materiali riflettenti
Neve
Murature chiare
Argilla
Conifere
Sabbia asciutta
Sabbia bagnata
Calcestruzzo
Asfalto vecchio
Asfalto nuovo
% Riflettività
90 %
80 %
Fino al 70%
35%
55%
40%
30%
18%
5%
14
PREGI E DIFETTI DEL SISTEMA
VANTAGGI
• relativa rapidità;
• elevata finestra di scansione ;
• appoggio a terra minimo (piattaforma aerea) ;
• rilievo non è influenzato dalle condizioni di
luce esterna;
• informazione geometrica tridimensionale
molto accurata;
• la valutazione dei diversi valori di riflettanza in
relazione del tipo di materiale costituente l’oggetto rilevato, che si traduce in una variazione
del valore cromatico dei punti acquisti che consentono l’analisi delle tipologie di materiali costituenti l’oggetto osservato);
• possibilità di integrare il rilievo con ortofoto
per fornire una completa rappresentazione dei
fenomeni del territorio;
• possibilità, attraverso l'analisi del modello
virtuale, di identificare e studiare l'oggetto
sotto diversi aspetti, e diversi punti di vista.
william meschieri
DIFETTI
• risultati completamente dipendenti dall’efficienza e dall’aggiornamento del software;
• rilievo di tutti gli oggetti presenti sulla
scena, dunque necessità di filtraggio e pulitura dei dati;
• il rilievo è limitato dalle condizioni ambientali (nebbia, pioggia, polvere);
• il rilievo è limitato dalle caratteristiche di
riflettività oggetti osservati;
• la strumentazione è un po’ ingombrante e
scomoda nel trasporto (anche per l'alimentazione a batteria).
15
LA PIATTAFORMA AEREA
In questo ambito, oltre all’apparato laser
che permette la misura della distanza fra
strumento e terreno (funzione telemetrica), è
presente un apparato di posizionamento GPS
e una piattaforma inerziale IMU (Inertial
Measuring Unit) con cui è possibile ottenere
la posizione assoluta e l’orientamento del
sistema durante le fasi di misura.
In particolare l’apparato GPS è utilizzato per
ottenere il posizionamento assoluto del centro del telemetro laser, mentre l’unità IMU è
necessaria per determinare, con continuità,
l’orientamento del sistema.
Gli impulsi luminosi generati dal sistema,
vengono orientati sul terreno tramite un
sistemi di specchi poligonali rotanti nella
direzione del terreno in senso ortogonale alla
direzione del volo (aereo o elicottero).
william meschieri
16
LA PIATTAFORMA AEREA
L’impiego del GPS, nell’ambito del rilievo
con laser scanner su piattaforma aerea,
avviene in modalità differenziale cinematica
con trattamento a posteriori (postprocessato); pertanto è necessario disporre a
terra di almeno un ricevitore base collocato
su un punto di coordinate note in posizione
tale che la distanza dal velivolo (elicottero)
non sia mai maggiore di 25-30 Km.
La precisione e l’accuratezza delle informazioni ottenute con il laser scanner aereo
dipende da svariate cause, tra le quali sono da segnalare:
le prestazioni intrinseche dello strumento utilizzato;
il livello di sincronizzazione del sensore laser e del sistema GPS-IMU;
la geometria dell’acquisizione (quota di volo e angolo di scansione);
natura dell’oggetto rilevato (grado di riflettività dei materiali);
accuratezza connessa alla trasformazione di datum per passare dal WGS84 ad un
sistema locale o cartografico.
william meschieri
17
INFORMAZIONI FORNITE DALL’ECO
Un problema tipico nella scansione dall’alto è la presenza di ostacoli che oscurano il
suolo (tipicamente coperture vegetali, tetti degli edifici, specchi idrici). Questi
ostacoli causano la riflessione di una parte dell’energia del segnale, mentre la
rimanente energia dello stesso segnale, quando esistono varchi, prosegue fino al
suolo per essere poi anch’essa riflessa.
Affinché entrambe le superfici (quella del suolo, e quella superiore di varie
coperture) possano essere rilevate simultaneamente dal sistema, i raggi laser
utilizzati in questi strumenti, detti LRF (Laser Range Finder ), devono soddisfare a
determinate specifiche fisiche per poter svolgere il compito a loro assegnato. Tra
queste caratteristiche la più importante è la lunghezza d’onda del raggio laser; in
effetti, affinché esso non penetri la superficie del terreno e possa invece essere
riflesso, deve essere usata una lunghezza d’onda nella banda dell'infrarosso.
Una seconda caratteristica è l'utilizzo di un segnale laser ad impulsi, in grado di
registrare diversi echi (impulsi riflessi) relativi alla stessa direzione. In effetti gli
strumenti laser scanner sono in grado di distinguere gli echi generati da diversi
oggetti presenti sulla traiettoria dello stesso impulso, dunque misurando diverse
distanze lungo la stessa direzione.
william meschieri
18
INFORMAZIONI FORNITE DALL’ECO
L’eco di risposta è univoco e analogo all’impulso laser quando quest’ultimo, nel suo percorso,
non trova ostacoli prima del suolo e questo risulta pianeggiante (a).
Quando invece l’impulso laser intercetta terreni in pendenza, le caratteristiche dell’eco
(unico) diventano più complesse e consentono la valutazione dei pendii (b).
Quando l’impulso laser, prima di arrivare al suolo, intercetta ostacoli, si verificano echi
multipli che consentono di produrre le rappresentazioni delle rispettive superfici (c).
william meschieri
19
ECHI MULTIPLI
Gli strumenti laser scanner sono in
grado di registrare le seguenti parti
dell’impulso riflesso (risposte o
echi) dai seguenti ostacoli:
dal primo elemento riflettente (es.
fogliame della vegetazione), detto
“First pulse” e indicato con Fp;
dall'ultimo elemento riflettente
(perlopiù il suolo) detto “Last
pulse” e indicato con Lp;
da entrambi gli echi precedenti.
Gli strumenti più sofisticati, inoltre, sono in grado di registrare fino a 4 echi relativi
alla direzione di uno stesso impulso laser, essi vengono indicati con il termine
“Multi pulse” e indicati con Mp.
william meschieri
20
RAPPRESENTAZIONI DSM e DTM
Le precedenti caratteristiche dei sistemi laser scanner consentono di fornire sia il
modello digitale tridimensionale di superficie, detto DSM (Digital Surfece Model),
sia il modello digitale del terreno detto DTM (Digital Terrain Model). Quest'ultimo
può essere poi integrato con immagini digitali del terreno per la creazione di
ortopiani della zona rilevata.
DSM
william meschieri
DTM
21
LA PIATTAFORMA TERRESTRE
A differenza della tecnologia laser scanner
aerea, in quella terrestre aumenta la densità
di punti rilevati per unità di superficie, e non è
richiesta la presenza di un sistema di
posizionamento GPS (che, però, può essere
opzionale) e della piattaforma inerziale IMU.
In questo contesto i punti rilevati dallo
strumento laser scanner vengono determinati
(e memorizzati) rispetto a un sistema di
riferimento relativo XYZ con origine nel
sensore laser. Anche nel rilievo terrestre, oltre
alle coordinate spaziali viene registrata
l’intensità del segnale di ritorno in funzione
della riflettività del materiale di cui sono
costituiti i punti dell’oggetto. Successivamente, attraverso appositi software, si può
creare un modello continuo, completo e
tridimensionale dell’oggetto rilevato.
william meschieri
22
LE TARGHETTE RIFLETTENTI
Per ottenere il modello completo
dell’oggetto rilevato occorre orientare e
allineare tutte le scansioni secondo uno
stesso sistema di riferimento.
Per poter eseguire questa operazione è
richiesta l’individuazione di almeno tre punti
di riferimento, con posizione nota, presenti
all’interno di due scansioni adiacenti (es.
spigoli di fabbricati, finestre, oppure targhette
artificiali riflettenti).
Questi tre punti, nei rispettivi sistemi di
riferimento, permettono un primo allineamento delle due scansioni, successivamente il
software del sistema effettua la ricerca automatica di tutti i punti omologhi, con i quali
viene eseguita una rototraslazione spaziale
dei punti di una scansione rispetto al sistema
di riferimento della scansione adiacente.
william meschieri
23
ELABORAZIONE DELLE MISURE
L'elaborazione delle misure con la tecnologia laser scanner viene eseguita, come
detto, dal software del sistema (fondamentali in questa tecnologia) secondo le
seguenti due fasi distinte:
elaborazioni di base (data raw)
elaborazioni successive
william meschieri
24
ELABORAZIONE DI BASE
È la prima elaborazione a cui sono sottoposte
le misure e comprende le seguenti operazioni:
1. Georeferenziazione: con essa vengono
determinate le coordinate spaziali tutti i
punti del modello digitale utilizzando le
misure ese-guite dagli apparati del sistema
(GPS, IMU, di-stanze) ed eseguendo
appropriate rototrasla-zioni spaziali.
2. Allineamento delle scansioni: è la fase in
cui le varie scansioni eseguite vengono
adattate minimizzando gli errori e sfruttando
i punti comuni delle zone di sovrapposizione.
L’elaborazione di base fornisce il primo risultato del rilievo attraverso una insieme di
punti sparsi (nuvola), con una opportuna densità (mediamente 3-5 punti al m2 ma
possono essere raggiunte anche densità di 10 punti al m2 ). Essi possono essere
utilizzati direttamente, oppure elaborati successivamente dal software al fine di
ottenere il tipo di informazioni e l’aspetto della visualizzazione del modello
desiderati, come illustrato al punto successivo.
william meschieri
25
ELABORAZIONI DI AFFINAMENTO
Il modello digitale raw può essere sottoposto a
ulteriori elaborazioni, eseguite con opportuni e
sofisticati software. Esse prevedono:
1. Filtraggi: procedure automatiche, previa settaggio iniziale di determinati parametri, con cui si
opera la rimozione dei punti non appartenenti
alla superficie che si vuole rappresentare.
2. Classificazione: procedura semiautomatica con
la quale vengono definite le caratteristiche dei
punti. La fase richiede la definizione preliminare
delle tipologie di punti (terreno, vegetazione,
edifici, strade, ecc..). Richiedendo l'intervento di
un operatore (con elevato grado di specializzazione), questa fase è assai più lunga rispetto a
quella di filtraggio che, una volta impostati i
parametri, viene eseguita in modo del tutto
automatico dal software.
william meschieri
26
ELABORAZIONI DI AFFINAMENTO
3.
Estrazione di entità geometriche:
procedura
automatica con la quale
software
specializzati
estraggono dal modello
digitale ottenuto dalle fasi
precedenti,
importanti
elementi di rappresentazione come profili, sezioni
e curve di livello.
In questo ambito il
modello tridimensionale
può essere integrato con
porzioni di immagini
raster georeferenziate, o
con vettori che sottolineino le caratteristiche dell’oggetto.
william meschieri
27
ESEMPI DI SCANNER LASER
Optech ALTM 3100 (piattaforma aerea)
Portata : 80-3500m
Impulsi laser: 33.000 impulsi/sec;
Laser: a impulsi, classe IV;
Abbracciamento max: da 870m a 2180m (alla quota relativa
di 3000m);
Densità per Ha: da 2.000 a 10.000 punti;
Angolo di scansione: da 0° a 20°;
Accuratezza verticale a 1200m : ±15 cm;
Accuratezza verticale a 3000m : ±35 cm;
Accuratezza orizzontale: meglio 1/2000 x altitudine
Camera: Rollei interna
william meschieri
RIEGLE LMS-Z620
Portata : fino a 2000m
Impulsi laser: 11.000 impulsi/sec;
Laser: a impulsi, classe 1 , colore rosso;
Interfaccia: PC portatile (opzionale);
Campo visivo orizzontale: 360°;
Campo visivo verticale: 80°;
Ottica : specchio poligonale rotante protetto;
Accuratezza sulla distanza : ±5 mm;
Camera: esterna opzionale
Esportazione modello: Autocad
28
ESEMPI DI SCANNER LASER
Leica Scanstation2
Portata : fino a 300m
Impulsi laser: 50.000 impulsi/sec;
Laser: a impulsi, classe 3R , colore verde;
Interfaccia: PC portatile (opzionale);
Campo visivo orizzontale: 360°;
Campo visivo verticale: 270°;
Ottica : singolo specchio oscillante protetto;
Accuratezza sulla distanza : ±4 mm;
Camera: interna ad alta definizione
Esportazione modello: Autocad, Microstation
william meschieri
Optech ILRIS 3D
Portata : fino a 1200m
Impulsi laser: 2.500 impulsi/sec;
Laser: a impulsi, classe 1 , invisibile;
Interfaccia: PC portatile (opzionale);
Campo visivo orizzontale: 40°;
Campo visivo verticale: 40°;
Ottica : singolo specchio oscillante protetto;
Accuratezza sulla distanza : ±4 mm;
Camera: interna ad alta definizione
Esportazione modello: Autocad,
29
ESEMPI DI SCANNER LASER
Trimble GX-3D
Portata : fino a 350m
Impulsi laser: 5.000 impulsi/sec;
Laser: a impulsi, classe 1 , invisibile;
Interfaccia: PC portatile (opzionale);
Campo visivo orizzontale: 360°;
Campo visivo verticale: 60°;
Ottica : singolo specchio oscillante protetto;
Accuratezza sulla distanza : ±5 mm;
Camera: interna ad alta definizione
Esportazione modello: Autocad, Microstation
william meschieri
Topcon GLS 1000
Portata : fino a 330m
Impulsi laser: 3.000 impulsi/sec;
Laser: a impulsi, classe 1 , invisibile;
Interfaccia: PC portatile (opzionale);
Campo visivo orizzontale: 360°;
Campo visivo verticale: 70°;
Ottica : singolo specchio poligonale rotante protetto;
Accuratezza sulla distanza : ±4 mm;
Camera: interna
Esportazione modello: Autocad
30
TERMINE UNITA’
william meschieri
31