LOW-COST 3D: Sensori, algoritmi e applicazioni – Fondazione Bruno Kessler, Trento – 8-9 Marzo 2012
Processamento di dati UAV con software low-cost
Daniele Sarazzi (*), Lorenzo Mancon (*), Antonio D’Argenio (**)
(*) Zenit s.r.l., Busto Arsizio (VA), (**) Consorzio Ticonzero, Palermo
INTRODUZIONE
Zenit s.r.l. dal 2006 opera nel campo dell’aerofotogrammetria di prossimità attraverso l’utilizzo di piattaforme UAV (Unmanned Aerial Vehicle) per la restituzione di modelli 3D ad elevato dettaglio in diversi ambiti di applicazione
(misurazioni estensive di cave, cantieri, scavi archeologici, smottamenti e frane di piccole e medie dimensioni). Dal 2007 Zenit offre servizi di ripresa aerea finalizzati all'osservazione, alla documentazione video/fotografica, alle
misurazioni fotogrammetriche e alle applicazioni di telerilevamento. Tutte le operazioni di pianificazione, esecuzione del volo e ripresa delle immagini, sono basate sull'uso delle piattaforme microdrones md4-200 ed md4-1000 e,
insieme alla restituzione e al trattamento delle immagini, vengono realizzate in ambiente GIS.
Zenit sta consolidando una metodologia che permetta di automatizzare le fasi di ripresa aerea, di acquisizione delle immagini e di elaborazione fotogrammetrica in modo da poter minimizzare tempi e costi. Attualmente la
metodologia di elaborazione fotogrammetrica si basa sull’utilizzo dei software Photomodeler Scanner e ArcGis, ma in tempi più recenti è emersa l’esigenza di adottare software freeware e open source al fine di ridurre ulteriormente
i tempi di lavorazione, i costi di licenza e di elaborazione, e di aumentare la flessibilità e l’adattabilità dei software alle diverse esigenze.
OBIETTIVI
L’obiettivo del presente lavoro è quello di sperimentare il trasferimento della metodologia di automatizzazione dell’elaborazione fotogrammetrica implementata in ambiente closed source ad ambiente freeware e open source e di
verificare la possibilità di intraprendere questa strada ottenendo lo stesso risultato. Gli strumenti di ripresa e acquisizione immagini non sono low cost (md4-200 e md4-1000 della classe dei VTOL-UAV di microdrones GmbH).
MATERIALI E METODI
Nel presente lavoro vengono presentati 2 casi di studio che sono stati trattati con entrambe le metodologie:
1 con software closed source (Photomodeler Scanner - ArcGis)
2 con software open source in fase di sperimentazione (Linux, Bundler, PMVS e CMVS, PMVS2, MeshLab)
Entrambi i metodi hanno in comune i seguenti passaggi :
1-Identificazione area di studio
2-Pianificazione del volo
3-Posizionamento e rilevamento di punti di controllo (GCP)
4-Acquisizione immagini
5-Georeferenziazione speditiva
6-Elaborazione fotogrammetrica
L’acquisizione delle immagini avviene mediante un drone in grado di eseguire un volo pianificato attraverso una flight planning utility sviluppata da Zenit in ambiente GIS.
Il volo viene eseguito in modo automatico eseguendo una serie di azioni pre-impostate in corrispondenza di waypoints definiti in fase di pianificazione del volo.
La metodologia 1 attualmente utilizzata prevede l’elaborazione dei dati acquisiti tramite il software Photomodeler Scanner per l’estrazione della nuvola di punti, la quale viene ricampionata
in ArcGis con strumenti appositamente realizzati da Zenit. La pointmesh ottenuta viene rielaborata in Photomodeler Scanner per ottenere un modello tridimensionale.
Tale metodologia fornisce risultati soddisfacenti in termini di precisione del modello (risoluzione , rms), ma comporta elevati tempi di elaborazione ed elevati costi (in termini di risorse umane
impiegate , macchine, software).
La metodologia 2 che Zenit sta sviluppando prevede che :
le immagini acquisite da drone vengano elaborate dal software Bundler che restituisce in output il posizionamento in uno spazio tridimensionale dei punti di presa e una nuvola di punti di
massima dell’area rilevata;
questi risultati e le specifiche della fotocamera vengono dati in input ai software CMVS/PMVS o PMVS2 per ottenere nuvole di punti a maggiore densità ;
le nuvole di punti estratte vengono trattate in ambiente MeshLab per ricavare il modello 3D; una elaborazione a basso livello sui formati testuali riconduce alla corretta georeferenziazione
(entro i limiti della determinazione posizionale dei GCP).
CASI DI STUDIO
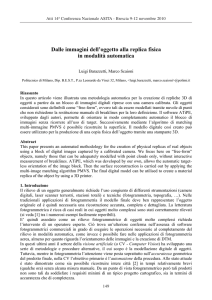
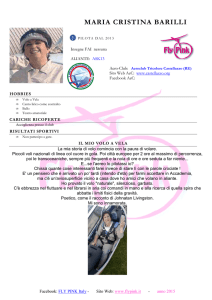
SITO ARCHEOLOGICO HYMERA, PALERMO*
ELABORAZIONE MEDIANTE PHOTOMODELER SCANNER
ELABORAZIONE MEDIANTE BUNDLER E PMVS
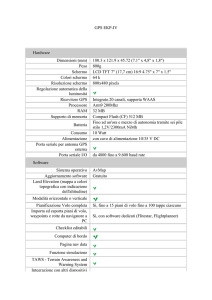
PIANO DI VOLO
quota di volo: 20 m
camera utilizzata: Pentax Optio A40
dimensione pixel a terra: 0,5 cm
n° immagini acquisite: 16
n° GCP: 30
Nuvola di punti (sopra) ricavata da
elaborazione con Photomodeler Scanner e
ArcGis e dettaglio del modello 2D ½ dello
scavo a cui è stata applicata la texture in
ambiente Gis.
Nuvola di punti (sopra) ricavata da
elaborazione con Bundler-CMVSPMVS e dettaglio (a lato) del modello
3D ricavato con MeshLab a cui è stata
applicata la texture
estratta dalla
nuvola di punti
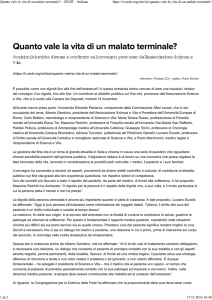
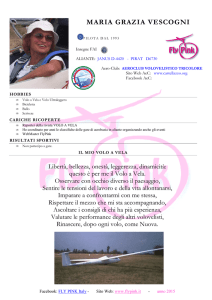
CAVA DI VECCHIANO, PISA
ELABORAZIONE MEDIANTE BUNDLER E PMVS
ELABORAZIONE MEDIANTE PHOTOMODELER SCANNER
Modello 2D ½ realizzato in ambiente ArcGis a cui è stata applicata una vestizione
rappresentante la pendenza (verde = piano, rosso = verticalità)
Nelle aree rosse si ha una perdita di informazione: infatti queste aree
corrispondono a pareti in contropendenza. ArcGis non è in grado di rappresentare
2 punti che abbiano medesime coordinate planimetriche ma quote diverse.
PIANO DI VOLO
- 2 linee di volo a 80m di distanza verticale da terra
- ciascuna linea è stata usata per raccogliere
Sia immagini nadirali che immagini oblique e parallele
al piano medio del versante
Modello 3D realizzato in MeshLab
L’immagine mostra come le aree che con il metodo Photomodeler – ArcGis
sono soggette a perdita di dato e visualizzate come pareti verticali
risultano rappresentate come pareti aggettanti.
CONCLUSIONI E SVILUPPI FUTURI
I risultati ottenuti dalle prime sperimentazioni mediante software low cost mostrano che la strada verso questo tipo di metodologia può permetterci di avere risultati paragonabili a quelli sino ad ora ottenuti con Photomodeler
Scanner nella modellazione 3D. Ciò vale sia relativamente al numero di punti estratti che per il loro posizionamento. Ulteriore tempo di analisi dovrà essere speso per ottenere dei razionali numerici affidabili circa la
comparazione di precisione e accuratezza tra le due tecniche; nel breve periodo di test è risultato evidente e inequivocabile il considerevole efficientamento nella gestione delle commesse che deriva dalla forte automazione
dell'approccio operativo ai software open source che sono stati utilizzati, rispetto ai software proprietari che tuttora reggono la filiera di elaborazione del dato presso Zenit
* la pianificazione e l'esecuzione dei voli, così come la raccolta di tutti i dati sul campo per il caso dello sito archeologico di Hymera sono stati condotti dal Consorzio Ticonzero di Palermo, cui vanno i ns ringraziamenti
per aver condiviso con Zenit tali informazioni.