Politecnico di Torino
FACOLTÀ DI INGEGNERIA
Corso di Laurea Magistrale in Ingegneria Biomedica
Tesi di Laurea Specialistica
Analisi Quantitativa e Rendering Ottimizzato di Architetture
Vascolari Tumorali in 3-D
Candidato:
Relatore:
Marco Caballo
Prof. Filippo Molinari
Matricola 204751
Anno Accademico 2015-2016
Ringraziamenti
Vorrei ringraziare il Prof. Filippo Molinari per avermi permesso di lavorare in libertà a questo
lavoro di tesi, per la sua grande disponibilità e per tutte le belle esperienze vissute in ambito
accademico. Ringrazio inoltre tutti i suoi collaboratori, gli Ing. Kristen Meiburger, Cristina
Caresio e Massimo Salvi, per il supporto datomi e per l’ambiente di lavoro che creano, professionale e, allo stesso tempo, molto piacevole.
Ringrazio inoltre il Dott. M. Deandrea e tutti i medici dell’ospedale Mauriziano di Torino
per l’ospitalità e la collaborazione.
Ringrazio la mia famiglia per avermi permesso di studiare e di trovare la mia strada, l’ingegneria biomedica.
Ringrazio i miei amici e compagni di corso per aver reso bellissimi questi anni di università,
ed in particolar modo vorrei ringraziare Francesca (Frency) per essere stata la mia compagna
di avventure e sventure in ogni lezione, ogni progetto e ogni laboratorio.
Ringrazio Chiara e Stella per il sostegno datomi in tutti questi anni (anche prima dell’università) in ogni mia scelta di vita.
Infine, desidero ringraziare con tutto il cuore tutti miei amici, in particolar modo Andrea,
Lucas, Silvia e Francesca (Fra). Grazie ragazzi per essere stati sempre presenti, per avermi
sempre appoggiato e consigliato, per avermi aiutato a superare le difficoltà e per aver condiviso con me ogni traguardo.
Grazie a tutti.
3
Indice
Introduzione
6
1 Elaborazione di immagini digitali per applicazioni mediche
1.1 Sistema digitale di elaborazione delle immagini . . . . . . . .
1.2 Il sistema visivo umano . . . . . . . . . . . . . . . . . . . . .
1.3 Digitalizzazione di un’immagine . . . . . . . . . . . . . . . . .
1.3.1 Quantizzazione spaziale . . . . . . . . . . . . . . . . .
1.3.2 Quantizzazione in intensità . . . . . . . . . . . . . . .
1.4 Risoluzione spaziale e dimensione del pixel . . . . . . . . . . .
1.5 Rumore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Modalità di imaging . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
8
9
11
11
12
13
13
16
2 Immagini mediche, ottenute mediante radiazioni ionizzanti e non ionizzanti, volte all’identificazione di strutture vascolari e immagini flussimetriche
2.1 Raggi x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Angiografia Digitale a Sottrazione . . . . . . . . . . . . . . . . . . . .
2.1.2 Tomografia Computerizzata . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Risonanza Magnetica (MR) . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Angiografia a Tempo di Volo (TOF MRA) . . . . . . . . . . . . . . . .
2.2.2 Angiografia a Contrasto di Fase . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Angiografia con angenti di contrasto . . . . . . . . . . . . . . . . . . .
2.3 Ultrasonografia (US ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 CEUS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Flussimetria Doppler . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 Imaging Fotoacustico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.4 Angiografia Acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
18
19
22
22
24
24
24
24
29
29
32
32
3 Vascolarizzazione e architettura vascolare di una lesione neoplastica
3.1 Confronto tra circolazione ematica nei tessuti sani e vascolarizzazione tumorale
3.2 Noduli tiroidei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Studi di perfusione e ricostruzione 3D della vascolarizzazione di una lesione .
34
34
37
39
4 Filtro per il miglioramento della visualizzazione della componente vascolare
su immagini in due e in tre dimensioni
4.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Metodo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Segmentazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Conclusioni e applicazioni in flussimetria . . . . . . . . . . . . . . . . . . . . .
4.5 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
41
42
46
47
48
4
5 Algoritmo per la localizzazione delle centerlines di strutture
due e in tre dimensioni
5.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Metodo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Esempio di applicazione 2D su fundus retinico . . . . . . . . . . .
5.4 Esempio di applicazione 3D su immagini di Risonanza Magnetica
5.5 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vascolari in
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
55
55
57
63
67
70
70
.
.
.
.
.
.
6 Algoritmo di skeleton per il tracking vascolare di lesioni tiroidee
6.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Algoritmi di thinning . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.2 Algoritmi basati su Distance Transform . . . . . . . . . . . . . . . . .
6.1.3 Algoritmi basati sui diagrammi di Voronoi . . . . . . . . . . . . . . . .
6.2 Semplice algoritmo di skeleton basato su Distance Transform 3D . . . . . . .
6.3 Algoritmo di skeleton basato su Distance Transform e su altri criteri geometrici
6.4 Algoritmo di thinning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Unione dei processi di thinning e di estrazione delle centerlines . . . . . . . .
77
77
77
78
78
79
80
83
88
7 Features extraction per l’analisi automatica di parametri quantitativi della
lesione
95
7.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
7.2 Misure di tortuosità vascolare . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
7.2.1 Distance Metric (DM) . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
7.2.2 Inflection Count Metric (ICM) . . . . . . . . . . . . . . . . . . . . . . 100
7.2.3 Sum Of Angles Metric (SOAM) . . . . . . . . . . . . . . . . . . . . . . 102
7.3 Densità Vascolare Volumetrica (VVD) . . . . . . . . . . . . . . . . . . . . . . 107
7.4 Numero di ramificazioni (NB ) . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.5 Analisi della distribuzione spaziale dell’architettura vascolare all’interno della
lesione: perilesionale o intranodulare . . . . . . . . . . . . . . . . . . . . . . . 107
7.6 Risultati: Tumori Tiroidei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
7.7 Risultati: Tumori Prostatici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Conclusioni
129
BIBLIOGRAFIA
130
5
Introduzione
L’architettura vascolare di un tumore è un importante fattore correlato con il suo grado di
malignità, ed è un indicatore prognostico per un gran numero di tipi di cancro. Esistono ad
oggi varie tecniche di imaging diagnostico (morfologiche e funzionali) utilizzate per visualizzare la vascolarizzazione di un tumore: la Tomografia Computerizzata (CT ), la Risonanza
Magnetica (M RI), la Tomografia a Emissione di Positroni (P ET ), gli Ultrasuoni (U S). In
particolare, il Power Doppler 3D a ultrasuoni (P DU S) è uno strumento relativamente poco
costoso e con grande sensibilità ad identificare i flussi ematici all’interno di un tumore situato
in zone non troppo profonde del corpo umano (ad esempio, la tiroide).
In questa tesi vengono proposti metodi, anche innovativi, per la chiara visualizzazione in tre
dimensioni dell’architettura vascolare di un tumore. Dopo un’introduzione sui fondamenti
dell’elaborazione di immagini mediche (Biomedical Image Processing), sulle tecniche disponibili per indagare strutture vascolari umane e sul comportamento funzionale di un tumore,
viene proposto un filtro automatico per il miglioramento del contrasto dei vasi sanguigni su
un’immagine. In seguito vengono descritti alcuni metodi per quantificare l’informazione vascolare su un’immagine volumetrica basati su processi di skeleton, thinning e individuazione
di centerlines. In particolare tali strumenti risultano molto utili sulle immagini ad ultrasuoni
(funzionali) Power Doppler e con mezzo di contrasto (CEU S) per estrarre gli aspetti morfologici del tumore e per facilitarne la comprensione.
Infine, viene effettuata un’analisi quantitativa sulle reti vascolari individuate dalle immagini
3D dei tumori. Vengono estratti sei parametri numerici (features), tra cui tortuosità dei
vasi, numero di ramificazioni, densità vascolare e pattern spaziale della vascolarizzazione dai
risultati dei processi di thinning e centerlines 3D.
Questi parametri mostrano una correlazione tra un determinato tipo di morfologia dei vasi
sanguigni e il grado di malignità di una lesione neoplastica, indicando che i metodi proposti
posseggono un potenziale che, se sviluppato, si spera possa fornire un valido supporto alla
diagnosi tumorale.
6
Capitolo 1
Elaborazione di immagini digitali
per applicazioni mediche
Il ricevere e l’analizzare immagini costituisce gran parte dell’attività cerebrale degli essere
umani durante la loro vita. Più del 99% dell’attività del cervello umano è coinvolta nel
processamento di immagini ricevute dalla corteccia visiva. Noi esseri umani generiamo, ricordiamo e trasmettiamo continuamente immagini. Tali immagini possono essere formate da
molti tipi di oggetti utilizzando diversi meccanismi di formazione e di conseguenza i sistemi
di imaging per uso clinico possono essere classificati secondo diversi criteri, ad esempio in
funzione del tipo di radiazione utilizzato per creare l’immagine. La radiazione elettromagnetica, fra tutte, è usata in molti sistemi di imaging. La banda in radiofrequenza è alla
base della Risonanza Magnetica (MR), l’infrarosso viene utilizzato in alcune applicazioni di
microscopia, la radiazione ultravioletta nella microscopia a fluorescenza, i raggi x trovano
impiego in numerose applicazioni della diagnostica clinica.
Maggiore è il contenuto energetico della radiazione elettromagnetica (ad esempio, raggi x e
raggi gamma), minore è la sua lunghezza d’onda e meglio la tecnica risulta in grado di rilevare
dettagli anatomici di piccole dimensioni.
Oltre alla radiazione luminosa, nel campo dell’imaging medico vengono anche utilizzate onde
sonore ad alta frequenza (dell’ordine dei MHz) dette Ultrasuoni e campi elettromagnetici
statici o quasi-statici (ad esempio nella Tomografia ad Impedenza Elettrica e nella Magnetoencefalografia).
Un altro modo per classificare i sistemi di imaging è relativo invece non alle caratteristiche
della forma di energia utilizzata per generare le immagini ma alle proprietà dell’oggetto che
si vuole indagare. Ad esempio nella Medicina Nucleare (Tomografia ad Emissione di Positroni, PET, Tomografia Computerizzata ad Emissione di Singolo Fotone, SPECT ) le immagini
radioisotopiche sono ottenute registrando le radiazioni emesse (e non trasmesse o riflesse) dai
tessuti dopo la somministrazione di un mezzo di contrasto radioattivo, mentre le immagini a
raggi x (radiografie) dipendono dalla trasmittanza del raggio x attraverso l’oggetto di interesse.
Una terza classificazione suddivide i sistemi di imaging in metodi diretti e metodi indiretti.
In un metodo diretto i dati acquisiti danno diretto accesso ad un’immagine ben riconoscibile;
i metodi indiretti invece prevedono una serie di elaborazioni o ricostruzioni dei dati acquisiti
prima che l’immagine diventi disponibile per l’osservazione. I metodi indiretti includono, ad
esempio, la radiografia tradizionale (dove l’immagine latente è catturata nell’emulsione di un
film fotografico ed è resa visibile grazie al successivo sviluppo chimico del film), la radiografia
computerizzata (dove gli elettroni di valenza sono intrappolati in piatti a base di fosforo fotostimolabile), le tecniche tomografiche (dove le varie immagini bidimensionali acquisite (fette)
vengono impilate ed elaborate per ottenere la visualizzazione di un’immagine volumetrica in
tre dimensioni). Chiaramente, lo svantaggio maggiore dei sistemi di imaging indiretti è dato
dal ritardo tra acquisizione e visualizzazione, con il conseguente rischio di degradazione del7
l’immagine durante tale lasso di tempo. Il vantaggio è però che l’immagine finale è spesso resa
disponibile in formato digitale, permettendo cosı̀ una facile memorizzazione, archiviazione e
condivisione.
1.1
Sistema digitale di elaborazione delle immagini
Con l’avvento dei calcolatori il mondo analogico sta via via lasciando posto all’era digitale.
In molti sistemi l’immagine è fornita all’utente direttamente in formato numerico: viene cioé
campionata (suddivisa in elementi dimensionali minimi, detti pixel ) e quantizzata, ovvero ad
ogni pixel è assegnato un valore numerico. Dal momento che la maggioranza delle immagini
per uso medico è in scala di grigi, generalmente ogni pixel è codificato su 8 bit (1 byte), cioé
su 28 = 256 livelli di grigio nel sistema binario utilizzato dai computer. Ottenuta l’immagine
digitale, la si può elaborare ed analizzare, nonché trasmettere ad altri utenti.
Un sistema digitale completo per l’elaborazione di immagini è costituito da una parte hardware e da una parte software, che permettono di svolgere i seguenti compiti:
• Acquisire un’immagine utilizzando appropriati sensori per rilevare la radiazione (o i
campi elettromagnetici) e catturare le caratteristiche di interesse dell’oggetto di studio. Se l’immagine ricavata è analogica, dovrà essere digitalizzata da un convertitore
analogico-digitale (ADC ).
• Immagazzinare e memorizzare l’immagine.
• Elaborarla.
• Mostrarla.
L’elaborazione in ambito biomedico, che è l’aspetto fondamentale in questo lavoro di tesi,
consiste in una serie di operazioni, possibilmente automatiche, che hanno lo scopo di ridurre
il rumore presente in ogni sistema di imaging (Image Restoration), migliorare la visualizzazione (Image Enhancement), effettuare una serie di misure sull’immagine per estrarre dei
caratteri quantitativi (Features Extraction) ed eventualmente associare una determinata immagine ad una classe sulla base delle caratteristiche estratte (ad esempio stabilire se una
determinata lesione ha un carattere prevalentemente benigno o maligno). Questo ultimo step
è generalmente definito Classificazione dell’immagine o Pattern Recognition.
Figura 1.1: Schema a blocchi di un sistema digitale di elaborazione delle immagini.
8
1.2
Il sistema visivo umano
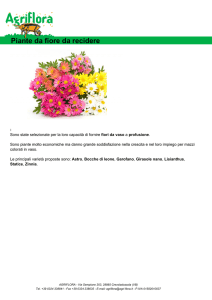
Il sistema visivo umano comprende gli occhi, i nervi associati e parte del cervello. Ad oggi la
maggior parte dei neurologi conviene nel considerare l’occhio non come singolo apparato ma
come protrusione del cervello, dunque parte integrante a tutti gli effetti del sistema nervoso.
L’occhio converte l’informazione luminosa che entra nella pupilla in impulsi elettrici che
vengono trasmessi, lungo il nervo ottico, al cervello. La luce visibile è rifratta dalla cornea ed
entra nella pupilla, oltre la quale viene nuovamente rifratta per formare un’immagine inversa
proiettata sulla membrana più interna dell’occhio, la retina.
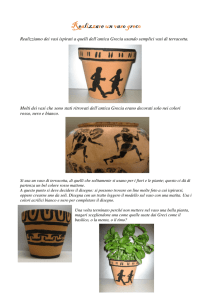
Figura 1.2: Sezione trasversale di un occhio umano (immagine tratta da wisegeek.com).
La retina è composta da numerosi strati, uno dei quali, l’epitelio pigmentato retinico,
contiene i fotorecettori che percepiscono la radiazione luminosa e la convertono in impulsi
elettrici. Ci sono due tipi di fotorecettori: i bastoncelli e i coni.
I bastoncelli sono più numerosi, con circa 100 milioni di unità distribuite sull’intero strato
retinico; sono cellule molto sensibili alla luce. I coni, in numero inferiore (circa 6-7 milioni)
sono invece concentrati in una piccola regione circolare vicino al centro della retina, grande
circa 1-2 mm2 : la fovea. Vi è inoltre una zona priva di recettori dove il nervo ottico si connette alle retina: è nota come il disco ottico e costituisce un punto cieco del campo visivo.
I bastoncelli sono sensibili alla luce blu-verde, con un picco di sensibilità alla lunghezza d’onda di 498 nm; non possono distinguere i colori ma solo la loro intensità. La loro funzione si
esplica soprattutto nella visione notturna o comunque in situazioni di luce poco intensa. I
coni invece, suddivisi in tre categorie ciascuna sensibile ad uno dei tre colori primari (rosso,
verde, blu), permettono la visione a colori. Va inoltre ricordato che l’utilizzo di due occhi
permette la visione stereoscopica, ossia la percezione della profondità, che non sarebbe possibile se si utilizzasse un’unica lente (cioé un unico occhio).
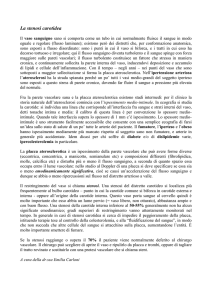
I bastoncelli nella retina rispondono, come già detto, a livelli di luce di bassa intensità (Vi9
sione Scotopica), mentre i coni ne percepiscono gli alti livelli (Visione Fotopica); tra questi
due livelli l’occhio umano può adattarsi ad un ampio range di intensità luminosa, dell’ordine
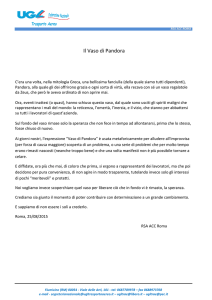
di 1010 , noto come Range dinamico. La sensibilità combinata di coni e bastoncelli produce
una risposta logaritmica (Figura 1.3), dove la luminosità percepita varia come il logaritmo
dell’intensità di luce incidente l’occhio, misurata in milli-Lambert (mL).
Figura 1.3: Risposta dell’occhio all’intensità di luce.
Nonostante l’ampio range dinamico, l’occhio umano non può distinguere simultaneamente
tutti questi livelli; adatta invece i livelli di intensità percepiti concentrandoli in un intervallo in cui risulta maggiormente sensibile, attraverso un processo detto accomodazione della
luminosità. Il sistema visivo umano infatti non distingue più di 25-30 livelli di intensità;
inoltre non percepisce la luminosità coma valore assoluto, ma effettua dei confronti spaziali
nella scena visualizzata per determinare se una regione o un oggetto appare più chiaro o più
scuro rispetto ad un altro. La sensibilità verso le variazioni percentuali di luminosità, invece
che alle variazioni assolute, è una diretta conseguenza della risposta logaritmica dell’occhio
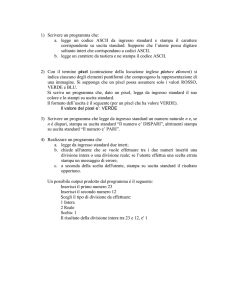
all’intensità di luce incidente. Inoltre l’occhio umano non può distinguere due oggetti come
separati a meno che la luce riflessa dai due oggetti non cada su due diversi coni; in pratica,
due oggetti possono apparire distinti solo se sottendono un angolo di circa 1’ tra la pupilla
e due diversi coni sulla fovea (Figura 1.4). Questo valore è detto acuità visiva o risoluzione
spaziale dell’occhio.
Infine, va detto che il sistema visivo umano è estremamente potente nel riconoscere forme e oggetti ma non è adatto ad effettuare misure accurate di intensità, distanze o aree,
grandezze che invece possono essere calcolate abbastanza facilmente da un sistema di visione
computerizzata che si avvale di algoritmo di elaborazione e riconoscimento.
10
Figura 1.4: Risoluzione spaziale dell’occhio umano.
1.3
Digitalizzazione di un’immagine
Un’immagine deve essere quantizzata (digitalizzata) per poter venire espressa in forma numerica e supportata da un calcolatore. I due processi fondamentali per la conversione di
un’immagine da analogica a digitale sono la quantizzazione (o discretizzazione) spaziale e la
quantizzazione (o discretizzazione) in ampiezza (o in intensità).
1.3.1
Quantizzazione spaziale
Questo processo viene anche detto campionamento. Si immagini ad esempio di scansionare
con una luce laser focalizzata un’immagine analogica: il raggio laser, di diametro non nullo, si
muove sull’immagine colpendone, ad ogni suo movimento, una piccola superficie detta campione. Tale superficie ha dimensioni uguali, in prima approssimazione, alla sezione trasversale
del fascio laser. Maggiore è la frequenza con la quale i campioni vengono acquisiti, più accurata è la rappresentazione dell’immagine tradotta in digitale e maggior memoria occuperà
in un computer. Tale frequenza è detta frequenza di campionamento (fs ) ed è espressa come
il numero di campioni acquisiti per unità di distanza. La distanza tra due campioni (d) è
l’inverso della frequenza di campionamento. Generalmente la frequenza di campionamento
è la stessa in entrambe le direzioni x e y di un’immagine, e la superficie (assunta sempre,
per semplicità, quadrata) con i lati uguali alla distanza tra due campioni (d) costituisce un
singolo pixel dell’immagine digitalizzata.
La frequenza di campionamento dunque determina la distanza tra i campioni acquisiti,
e tale distanza diventa, per l’immagine digitale, la dimensione fisica del pixel (più è piccola,
migliore sarà la risoluzione dell’immagine). Ogni pixel quindi non rappresenta un singolo
punto, ma una cella quadrata elementare con un suo valore di luminosità. L’immagine analogica originale è diventata quantizzata nello spazio, ossia è ora composta da un numero finito
di pixel, ognuno con un suo preciso valore di luminosità.
Al fine di catturare adeguatamente i dettagli più fini, occorre scegliere una frequenza di
campionamento che sia almeno due volte il massimo contenuto frequenziale dell’immagine
analogica di partenza; tale enunciato è noto come teorema di Nyquist-Shannon:
fs ≥ 2 ∗ fmax
(1.1)
La minima frequenza di campionamento che permette di ottenere un’immagine digitale
fedele a quella analogica di partenza è detta frequenza di Nyquist (fN ): dunque il precedente
teorema può assumere la seguente espressione:
fN ≥ fmax
11
(1.2)
Figura 1.5: Esempio del processo di quantizzazione spaziale per un profilo monodimensionale.
Profilo (analogico) attraverso la sezione di un film fotografico (in alto); dopo la digitalizzazione
(in basso).
Se l’immagine campionata contiene frequenze maggiori della frequenza di Nyquist, tali frequenze vengono sottocampionate ed appaiono erroneamente come frequenze più basse
sull’immagine digitale. Questo fenomeno è noto col nome di aliasing e tali basse frequenze
che portano un’informazione errata sono dette frequenze di aliasing. Questo tipo di errore
deve sempre essere, per quanto possibile, contenuto. Purtroppo quasi tutti i sistemi digitali
producono immagini leggermente sottocampionate per risparmiare sui vincoli di progetto (ad
esempio, sulla dimensione dei trasduttori).
1.3.2
Quantizzazione in intensità
Come descritto nel paragrafo precedente, i pixel discreti formati attorno alle posizioni dei
campioni rendono l’immagine digitale discreta nello spazio. Il fatto che ad ogni pixel venga
assegnato un unico valore di intensità, senza ammettere sfumature, è invece alla base del
processo di quantizzazione in intensità.
Figura 1.6: Schematizzazione dei toni di grigio associati ad un’immagine. Utilizzando una
codifica su n bit, si hanno a disposizione 2n toni di grigio.
Molte immagini digitali sono codificate su 8 bit, cioé allocano 8 bit ad ogni pixel; ciò
risulta in 256 livelli di grigio possibili, dal nero al bianco. In generale allocare n bit per pixel
significa ottenere un’immagine con 2n toni di grigio (Figura 1.6). Ad ogni campione prelevato
12
dall’immagine analogica viene assegnato il tono di grigio disponibile più vicino al suo valore
vero. Questo porta ad un errore di approssimazione detto errore di quantizzazione, il cui
effetto può essere minimizzato aumentando i bit con cui è codificata l’immagine. Chiaramente, aumentare il numero di bit comporta un aumento delle dimensioni del file digitale (che
occuperà quindi più memoria), esattamente come aumentare la frequenza di campionamento migliora la risoluzione spaziale, ma al costo di un maggior spazio in memoria occupato
dall’immagine.
1.4
Risoluzione spaziale e dimensione del pixel
La risoluzione spaziale è una misura della capacità dell’immagine di mostrare chiaramente
dettagli fini. Dipende sostanzialmente dalla risoluzione imposta dal sistema di imaging utilizzato e dalle dimensioni del pixel utilizzate per produrre l’immagine digitale. Quest’ultima
è determinata o dalla frequenza di campionamento scelta per il processo di digitalizzazione,
o dalle dimensioni fisiche dei rivelatori (ad esempio, una sonda ad ultrasuoni è caratterizzata
da un array (vettore) di cristalli piezoelettrici: più piccoli sono, migliore sarà la risoluzione
spaziale dell’immagine ecografica).
1.5
Rumore
Il rumore è rappresentato da fluttuazioni casuali (stocastiche) non desiderate su un’immagine.
Le principali sorgenti di rumore in un sistema di imaging digitale sono il rumore quantico
(che deriva dalla natura discreta della radiazione elettromagnetica e dalla sua interazione con
la materia) e il rumore elettronico contenuto nei rivelatori e negli amplificatori (presenti nel
caso in cui il segnale utile a produrre l’immagine sia di bassa intensità). Anche il processo
di digitalizzazione stesso aggiunge del rumore (rumore di quantizzazione) sull’immagine. Il
rumore quantico normalmente obbedisce alla funzione distribuzione di Poisson, mentre il
rumore elettronico è quasi sempre di tipo gaussiano.
Nella teoria della probabilità, la funzione gaussiana (detta anche distribuzione normale) è
una distribuzione continua spesso usata per descrivere, in prima approssimazione, variabili
casuali a valori reali che tendono a concentrarsi attorno a un singolo valor medio (µ). La
maggiore o minore dispersione degli eventi rispetto a tale valore medio prende il nome di
varianza della distribuzione (σ 2 ). La distribuzione di Poisson (o poissoniana) è invece una
distribuzione di probabilità discreta che esprime le probabilità per il numero di eventi che si
verificano successivamente ed indipendentemente in un dato intervallo di tempo, sapendo che
mediamente se ne verifica un numero noto (λ).
Figura 1.7: Distribuzione di Gauss (sinistra). Distribuzione di Poisson (destra). Immagini
tratte da wikipedia.com.
13
Figura 1.8: Immagine con contenuto di rumore minimizzato (a sinistra); corrotta da rumore
gaussiano, con valor medio nullo e varianza pari a 0.01 (al centro); corrotta da rumore
poissoniano (a destra).
Queste variazioni stocastiche possono essere quantificate abbastanza facilmente in una
regione dell’immagine in cui ci si aspetterebbe di trovare il livello di luminosità costante. La
potenza del rumore (PN ) è assunta uguale alla varianza (cioé al quadrato della deviazione
standard) dei valori dei pixel in quella regione. Per comprendere e calcolare la sua entità, il
rumore dovrebbe essere confrontato con la potenza media o con l’intensità del segnale (PS ),
che è ottenuta mediando il valore numerico dei pixel dell’immagine. Il rapporto segnalerumore (SN R) è il rapporto tra l’intensità del segnale e la potenza del rumore. E’ sovente
espresso in decibel (dB), considerando dieci volte il logaritmo (in base 10) del rapporto.
Dunque:
SN R [dB] = 10 ∗ lg10
PS
PN
(1.3)
Si ricorda che l’ipotesi secondo cui il rapporto segnale-rumore viene calcolato afferma
che il rumore deve essere spazialmente scorrelato, cioé la quantità di rumore presente in
una parte dell’immagine non deve essere legata (correlata) alla quantità di rumore presente
in nessun’altra zona. Si noti tuttavia che il rumore prodotto da un sistema di imaging è
una combinazione di molte sorgenti di rumore e non sempre è possibile identificarle tutte o
trattarle separatamente.
Dunque, in genere ci si limita a ridurre il quantitativo di rumore al fine di visualizzare
chiaramente la struttura anatomica di interesse, senza però poterlo mai eliminare del tutto.
Ad esempio nei sistemi di diagnostica a raggi x e a raggi γ (gamma), il numero di fotoni
emessi per unità di tempo dalla sorgente varia, e cosı̀ fanno le loro interazioni con il corpo
del paziente. Il risultato è un’immagine che presenterà una risoluzione spaziale (e temporale)
casuale e difficile da predire. Questa fonte di rumore (rumore quantico) è dunque inevitabile
nel campo dell’imaging medico ed occorre sempre tenerne conto. Si è già detto che il rumore
quantico obbedisce alla statistica di Poisson, la cui distribuzione possiede un’importante
caratteristica: la deviazione standard del numero di√campioni è numericamente uguale alla
radice quadrata della media dei campioni (SD = N , dove N è il numero di fotoni che
trasportano il segnale). La larghezza relativa della distribuzione diminuisce man mano che
la media aumenta, e dunque:
√
V ariazione relativa =
N
1
=√
N
N
(1.4)
Oppure, dal momento che N è una misura dell’intensità del segnale, il rapporto segnalerumore è espresso da:
14
Figura 1.9: Dall’alto al basso: esempio di segnale (potenziale evocato) sintetizzato (ideale);
segnale rumoroso; segnale mediato su 100 epoche.
√
N
SN R = √ = N
N
(1.5)
Il rapporto aumenta all’aumentare del valore medio: perciò, maggiore è il numero di fotoni
x o γ rilevato, più alto sarà il SN R, e dunque meno rumorosa apparirà l’immagine.
La presenza di rumore in un’immagine mina l’abilità di rivelare oggetti di piccole dimensioni
e a basso contrasto, cioé oggetti con un livello di luminosità che differisce poco dal valore di
luminosità dello sfondo. Ridurre il rumore quantico sull’immagine finale richiede un aumento
dei fotoni rilevati dai sensori. Tale obiettivo può essere perseguito aumentando l’intensità
della radiazione emessa (aumentando l’intensità, ad esempio, del fascio a raggi x o della
sorgente di radiazioni γ), oppure aumentando il tempo di esposizione. Un’alternativa è quella
di acquisire una serie di immagini e successivamente mediarle tra loro. Ipotizzando un
√ rumore
additivo e scorrelato, con l’operazione di media il rumore diminuisce di un fattore N , dove
N è il numero di immagini mediate.
In ognuno di questi casi il paziente viene esposto ad una dose più alta (nel caso di radiazione ionizzante, come la radiazione x o la radiazione γ, questo comporta un rischio troppo
alto e dunque inaccettabile). Una soluzione più vantaggiosa è quella di migliorare l’efficienza
dei sensori del sistema di imaging, ossia aumentare la probabilità che un fotone venga rilevato. In alternativa, con un sistema digitale, la dimensione dei pixel può essere aumentata
combinando molti dei pixel dell’immagine originale per formare nuovi pixel più grandi, che
conterranno quindi valori di intensità maggiori e contribuiranno ad aumentare il SN R. Purtroppo, in questo caso, il miglioramento del rapporto segnale-rumore è ottenuto a scapito
della risoluzione spaziale; può dunque essere una buona soluzione se l’obiettivo è l’identificazione di strutture anatomiche di grandi dimensioni su immagini a basso contrasto, ma non
aiuta nella visualizzazione di oggetti più piccoli.
Tutti i casi sopra citati illustrano un principio fondamentale da ricercare in molti sistemi
diagnostici (come raggi x o raggi γ): per ogni procedura di imaging che utilizza radiazioni
15
di tipo ionizzante è necessario ottenere un compromesso sull’esposizione, al fine di ottenere
un’immagine adeguata non sottoponendo però il paziente a rischi troppo gravosi. Tale compromesso non sempre è di facile realizzazione, dal momento che caratteristiche anatomiche
diverse possono risultare più o meno importanti a seconda del distretto corporeo indagato e
della situazione diagnostica del paziente.
Infine, per quanto riguarda la parte di rumore introdotta dal processo di digitalizzazione
dell’immagine, è importante scegliere una profondità (cioè il numero di bit su cui codificare
l’immagine) adeguata. Utilizzando un convertitore analogico-digitale con una dinamica appropriata, questa componente di rumore può essere drasticamente ridotta, risultando spesso
trascurabile rispetto al rumore quantico ed al rumore elettronico.
1.6
Modalità di imaging
I sistemi per imaging medico hanno tutti lo scopo di rilevare segnali fisici diversi dal corpo
del paziente e di costruire, a partire da questi segnali, un’immagine con valenza diagnostica.
Una modalità di imaging si riferisce ad un sistema che utilizza, per questo scopo, una precisa
e particolare tecnica. Alcune di queste modalità fanno uso di una radiazione ionizzante.
Con radiazione si intende la propagazione di energia attraverso un mezzo materiale, sotto
forma di onde o di energia cinetica propria di alcune particelle. Il termine ionizzante indica
la capacità di queste radiazioni di rompere i legami atomici e molecolari della materia con cui
interagiscono, modificandone lo stato chimico. Devono dunque essere utilizzate con prudenza
al fine di non causare danni seri o permanenti al paziente e al suo materiale genetico. Le
radiazioni di tipo ionizzante utilizzate in campo medico sono sostanzialmente i raggi x e i
raggi γ.
La radiazione non ionizzante, d’altro canto, non possiede il potenziale di danneggiare direttamente l’organismo umano ed i rischi associati al suo utilizzo sono considerati molto bassi.
Esempi di questo tipo di radiazione sono gli ultrasuoni e le onde radio.
16
Figura 1.10: Spettro elettromagnetico. Alcune frequenze della radiazione elettromagnetica,
come i raggi x e i raggi γ, vengono utilizzate nella diagnostica per immagini (immagine tratta
da wikipedia.org).
Figura 1.11: Spettro del suono. Alcune frequenze delle onde sonore, come gli ultrasuoni,
vengono utilizzate nella diagnostica per immagini (immagine tratta da olimpus.com).
17
Capitolo 2
Immagini mediche, ottenute
mediante radiazioni ionizzanti e
non ionizzanti, volte
all’identificazione di strutture
vascolari e immagini flussimetriche
Un’accurata visualizzazione e quantificazione della vascolarizzazione dei tessuti umani o di
un loro distretto è un importante prerequisito per un gran numero di procedure cliniche, dalla
pianificazione chirurgica di inserimento di uno stent alla diagnostica differenziale.
Le tecniche di imaging maggiormente utilizzate per la visualizzazione di flussi ematici e di
vasi sanguigni si possono suddividere in tre macrocategorie, in funzione del tipo di radiazione
energetica utilizzata. Si porrà particolare enfasi sulle tecniche ultrasonografiche, in quanto
preponderanti in questo lavoro di tesi.
2.1
Raggi x
I raggi x sono uno degli strumenti maggiormente utilizzati nella pratica clinica. Vengono
generati all’interno di un tubo detto Tubo di Roentgen (Figura 2.1) riscaldando un filamento
di tungsteno (catodo) che quindi rilascia elettroni per eccitazione termica. Tali elettroni vengono accelerati mediante l’applicazione di un campo elettrico, ed impattando contro l’anodo
(generalmente un disco in tungsteno reniato che ruota continuamente per evitare il surriscaldamento) perdono la loro energia cinetica; di questa energia cinetica, il 99% si dissipa
in calore, mentre l’1% genera raggi x. Generalmente la maggior parte dei raggi x prodotti
sono parte di uno spettro continuo (bremmstrahlung), ma alcuni (raggi x caratteristici ) presentano invece un’energia discreta. Ciò è dovuto al fatto che un elettrone del fascio, colpendo
l’anodo, ne scalza un elettrone dal guscio atomico più interno. Per coprire la lacuna energetica creatasi un altro elettrone dell’anodo compie un salto quantico nella lacuna, liberando
una quantità discreta di energia e generando un raggio x caratteristico (che presenta dunque
sempre lo stesso contenuto energetico). Nella radiografia tradizionale, comunque, la maggior
parte dell’energia prodotta presenta uno spettro continuo.
Tessuti diversi interagiscono in modo diverso con i raggi x, in funzione dello spessore (t)
e del coefficiente di attenuazione del materiale (µ). L’intensità I di un fascio a raggi x dopo
aver attraversato un tessuto di spessore t è funzione della sua intensità iniziale, I0 , e decade
esponenzialmente secondo le seguente legge:
I = I0 e−µt
18
(2.1)
Figura 2.1: Tubo di Roentgen (immagine tratta da medicalequipmentblog.blogspot.com).
Figura 2.2: Interazione dei raggi x con la materia (immagine tratta da whs.wsd.wednet.edu).
Materiali quali, ad esempio, l’osso presentano un alto valore del coefficiente di attenuazione, dunque bloccano maggiormente il passaggio dei raggi x rispetto ad altri tessuti molli.
Maggiore è l’attenuazione imposta da un certo tessuto, maggiore sarà la luminosità con la
quale l’immagine risultante lo mostrerà. Se l’intenzione clinica è rivolta all’indagine di tessuti molli, al fine di migliorarne la visualizzazione possono venire utilizzati mezzi di contrasto
radio-opachi a base di elementi ad alto numero atomico (iodio, bario). Se iniettati (o, in alcuni casi, ingeriti), tali agenti di contrasto aumentano il coefficiente di attenuazione dei tessuti
in cui vanno a depositarsi seguendo le normali vie ematiche (o metaboliche) dell’organismo,
permettendo la loro visualizzazione sull’immagine.
Nel contesto di questo lavoro di tesi, l’interesse verte sulle tecniche utili alla visualizzazione
di strutture vascolari a scopo diagnostico. Tali tecniche possono essere bidimensionali (come
la DSA) o volumetriche , come la Tomografia Computerizzata (CT ).
2.1.1
Angiografia Digitale a Sottrazione
La DSA (Digital Subtraction Angiography) è una delle applicazioni di videoradiografia più
diffuse in campo medico. Si basa sulla sottrazione temporale di una o più immagini riprese
dopo l’iniezione di un mezzo di contrasto (generalmente si utilizzano mezzi di contrasto iodati)
da un’immagine di riferimento acquisita prima dell’iniezione. In tal modo le strutture quali
19
Figura 2.3: Esempio di spettro a raggi x, composto da una parte continua (bremmstrahlung) e
da picchi di energia discreta (immagine tratta da Physics for Diagnostic Radiology, Seconda
Edizione, Dendy e Heaton, 1999).
Figura 2.4: Schema a blocchi di un generico circuito di pilotaggio per la generazione di raggi
x.
ossa e muscoli (che restano uguali sia prima che dopo la somministrazione del mezzo) vengono
eliminate e restano, almeno in teoria, solo i vasi e le cavità riempite dalla soluzione iodata.
La sottrazione è effettuata sul logaritmo dell’immagine, per eliminare l’effetto di disturbo di
20
strutture fortemente assorbenti sovrapposte ai vasi di interesse.
Nonostante il principale svantaggio delle tecniche a raggi x (ossia che la loro banda energetica
ricada nel campo delle radiazioni ionizzanti e dunque potenzialmente dannose per il paziente
sottoposto all’esame), con la DSA è possibile ridurre la dose erogata al paziente in virtù
dell’utilizzo del mezzo di contrasto. Un ulteriore vantaggio risiede nella possibilità di iniettare
il mezzo di contrasto per via endovenosa (e non localmente nel distretto interessato), con
conseguente riduzione del rischio, della difficoltà di esecuzione e del costo dell’esame. I limiti
sono costituiti dal campo utile di ripresa (dipendente dalle dimensioni dell’intensificatore) e
dalla risoluzione spaziale (circa 2 coppie di linee per millimetro).
Figura 2.5: (i) Immagine pre-iniezione del mezzo di contrasto; (ii) immagine post-iniezione
del mezzo di contrasto; (iii) immagine risultante dalla sottrazione delle due immagini precedenti, che mostra chiaramente i vasi sanguigni. Immagine tratta da Digital Image Processing
for Medical Applications, Prima Edizione, Geoff Dougherty, 2009.
Il processo di sottrazione delle due immagini ha inoltre la conseguenza di produrre un’im21
magine risultante anche più rumorosa di quella di partenza. Un processo di Averaging (media)
può essere utilizzato per ridurre tale rumore; si possono acquisire alcuni frames dello stesso
distretto, e l’immagine corrente può essere mediata con uno o più frames precedenti. L’operazione di media riduce il rumore (casuale e scorrelato) di un fattore uguale alla radice quadrata
del numero di frames mediati. Chiaramente, maggiore è il numero di frames acquisiti, meno
rumorosa risulterà l’immagine finale, al costo però di una maggiore dose di radiazioni per il
paziente. Il rapporto segnale-rumore è inoltre direttamente proporzionale alla concentrazione
del mezzo di contrasto che, se aumentata troppo, può comportare anch’essa dei rischi per il
paziente.
Va ricordato che, affinché la tecnica possa fornire immagini di buona qualità, il paziente
dovrebbe restare il più possibile immobile durante l’acquisizione delle due immagini (basale
e con mezzo di contrasto) al fine di limitare l’insorgere di fastidiosi artefatti da movimento
sull’immagine finale.
2.1.2
Tomografia Computerizzata
La Tomografia Computerizzata (CT ), introdotta negli anni ’70, è un’altra tecnica che fa uso
dei raggi x, con l’importante caratteristica di fornire immagini volumetriche di un distretto
corporeo. Mentre le tradizionali tecniche 2D forniscono un’immagine piatta in cui le strutture
hanno una luminosità proporzionale al loro assorbimento, le immagini CT sono rappresentative della distribuzione del coefficiente di attenuazione dell’oggetto in una sezione predefinita.
Viene acquisita una serie di sezioni e, impilandole una in fila all’altra, viene ottenuta l’immagine in 3 dimensioni.
Il principale vantaggio della tomografia, rispetto alle tecniche proiettive, è la possibilità di
indagare strutture che, se proiettate su un’immagine 2D, potrebbero venire nascoste da strutture sovrapposte maggiormente attenuanti (ad esempio le ossa), al costo però di un considerevole aumento della dose di radiazione erogata al paziente. Se si considera come riferimento
la radiazione di fondo dovuta alla combinazione di raggi cosmici e radionuclidi presenti nell’ambiente, è calcolato che giornalmente una persona è esposta in media a circa 3 µS (microSievert). Effettuare un singolo esame di CT della durata di pochi minuti espone il paziente a
10 mS, che equivalgono a più di tre anni di esposizione alla radiazione di fondo ambientale.
Dunque un esame di tomografia a raggi x, nonostante i suoi vantaggi in termini di risoluzione
e accuratezza, non può essere effettuato come esame di routine.
Dal punto di vista del rumore, il maggior contributo è dato dal rumore quantico, risultato della natura statistica dell’emissione dei raggi x. La fluttuazione√random del numero di
raggi x rilevati per ogni pixel (N ) è data approssimativamente
da N . Dunque il rappor√
to segnale-rumore aumenta con un fattore N (maggiore è la dose, migliore è l’immagine).
Oltre all’aumento della dose (se possibile da evitare), un aumento del SN R è raggiunto ingrandendo le dimensioni fisiche del voxel (elemento minimo dimensionale di un’immagine in
tre dimensioni), a scapito però, come già discusso nel primo capitolo, della risoluzione spaziale.
Infine, anche in tale tecnica il paziente deve limitare il più possibile i suoi movimenti durante tutta la durata dell’esame, sempre con l’obiettivo di limitare l’insorgere di artefatti da
movimento.
2.2
Risonanza Magnetica (MR)
L’imaging per Risonanza Magnetica (MRI ) è una tecnica non ionizzante che utilizza radiazioni elettromagnetiche in radiofrequenza (200 MHz - 2 GHz) ed intensi campi magnetici (1 2 Tesla). I campi magnetici sono prodotti da magneti superconduttori, nei quali la corrente è
fatta scorrere in spire di filo la cui resistenza elettrica è virtualmente nulla. Le immagini MR
forniscono dettagli anatomici e fisiologici (anche in 3 dimensioni), eccellente visualizzazione
anche dei tessuti molli e alta risoluzione spaziale (circa 1 mm). Analogamente alla CT a
22
raggi x, si tratta di una tecnica tomografica. Con un sufficiente numero di fette in 2D, i dati
possono venire rappresentati in 3 dimensioni. Il tempo di scanning è dell’ordine di alcuni
minuti (più lungo rispetto alla CT), dunque il movimento del paziente durante l’esame può
risultare ancora più critico nella generazione di artefatti sull’immagine. Inoltre gli scanner
MRI sono molto più costosi rispetto agli scanner CT a causa del magnete superconduttore
richiesto. Ciò limita ovviamente il campo di utilizzo di tale tecnica solo nelle strutture sanitarie più attrezzate e solo per quei pazienti il cui esame si rivela strettamente necessario al
fine di pianificare una particolare strategia chirurgica o per fornire una precisa localizzazione
di una lesione severa.
La Risonanza Magnetica sfrutta un campo magnetico statico ad alta intensità applicato al
corpo del paziente, che ha lo scopo di allineare lungo un’unica direzione i dipoli prodotti dalle
molecole d’acqua presenti nel corpo umano. Tale allineamento fa sı̀ che si crei un momento
magnetico (orientato nella direzione del campo magnetico), il cui modulo è proporzionale sia
al campo applicato che al numero di nuclei di idrogeno (contenuto nelle molecole d’acqua)
eccitati. Per misurare la magnetizzazione dei tessuti si introduce un’ulteriore perturbazione
che si ottiene applicando un altro campo magnetico (detto gradiente), con le sue tre componenti lungo x, y e z, rotante in un piano perpendicolare al campo statico. Scegliendo in
modo opportuno la pulsazione di questo secondo campo magnetico, si stabilisce una condizione di risonanza nei tessuti indagati. Una volta interrotta l’eccitazione in radiofrequenza,
il rilassamento (o meglio, i tempi di rilassamento) dei nuclei di idrogeno dalla condizione di
risonanza alla condizione di riposo genera un segnale (detto FID, Free Induction Decay) che
può essere misurato e che darà origine, dopo successive elaborazioni, all’immagine.
Figura 2.6: Schema a blocchi completo di un sistema di imaging a Risonanza Magnetica.
Le tecniche MR possono venire utilizzate per l’imaging di strutture vascolari. Infatti
la Risonanza Magnetica risulta molto sensibile agli effetti di movimento prodotti dal flusso
23
ematico. Questi sono fra l’altro responsabili di vari artefatti che possono ostacolare l’interpretazione di immagini volte ad indagare strutture statiche (ad esempio il cervello). D’altra
parte, gli effetti di flusso possono essere utilizzati vantaggiosamente per ottenere immagini dell’anatomia vascolare in modo non invasivo. Per ottenere misure di flusso sono state
sviluppate varie tecniche di Angiografia MR (anche detta M RA, Risonanza Magnetica Angiografica), entrate ormai nella pratica clinica routinaria da alcuni anni. Se ne riportano
brevemente in seguito le tre principali.
2.2.1
Angiografia a Tempo di Volo (TOF MRA)
E’ una tecnica MRI utilizzata per visualizzare il flusso all’interno dei vasi sanguigni senza
l’utilizzo di mezzi di contrasto. E’ basata sul fenomeno dell’intensificazione, legata al flusso
ematico, dei momenti di spin dell’elettrone degli atomi di idrogeno. In altre parole, si sfrutta
il fatto che un elemento di fluido all’interno di un vaso si sposta in un intervallo di tempo 4t,
mentre i tessuti circostanti restano immobili. Dunque il segnale rilevato in corrispondenza
dell’interno del vaso, che è generato da sangue in arrivo nel distretto e che quindi non ha
ancora subito l’eccitazione in radiofrequenza, risulta più forte rispetto a quello proveniente
dai tessuti immobili, che si ritrovano in fase di rilassamento. In questo modo si ottengono
delle fette bidimensionali in cui le sezioni dei vasi risultano enfatizzate rispetto ai tessuti
molli.
2.2.2
Angiografia a Contrasto di Fase
Si basa sul principio che gli spin degli atomi di idrogeno che si muovono nella stessa direzione
del campo magnetico gradiente sviluppano uno spostamento di fase proporzionale alla velocità
degli spin. Applicando dunque, nel caso più semplice, una sequenza di gradienti bipolari (due
gradienti con uguale intensità ma direzioni opposte) per decodificare la velocità degli spin,
si osserva che gli spin dei tessuti stazionari non presentano un netto cambiamento di fase;
al contrario quelli dei tessuti in movimento percepiscono una diversa intensità rispetto ad
uno dei due gradienti, in virtù del loro cambiamento di posizione. Ciò determina un netto
cambiamento di fase totale per i flussi ematici. Questa informazione permette di rilevare
direttamente la velocità del fluido in esame. In alternativa, l’immagine ottenuta può essere
sottratta ad un’altra immagine ottenuta invece senza l’applicazione dei due gradienti, per
ottenere un angiogramma finale che mostra posizione e morfologia dei vasi sanguigni.
2.2.3
Angiografia con angenti di contrasto
Questa metodica utilizza un mezzo di contrasto paramagnetico (gadolinio) che aumenta,
utilizzando opportune sequenze di eccitazione, l’intensità del segnale ricevuto a causa del
conseguente accorciamento del tempo di rilassamento del sangue dopo l’iniezione del mezzo. In questo modo le strutture vascolari possono facilmente essere estratte e quantificate
sull’immagine risultante. Questa tecnica è forse, delle tre, quella che presenta la maggiore
efficienza: riesce a distinguere in modo chiaro anche strutture vascolari soggette a stenosi
o a flusso turbolento, presenta un tempo di acquisizione ridotto ed una buona risoluzione
spaziale associata ad un elevato rapporto segnale-rumore, con conseguente riduzione degli
artefatti riscontrabili con l’angiografia a tempo di volo ed a contrasto di fase. Purtroppo
recenti studi hanno mostrato che il gadolinio presenta un livello di tossicità non trascurabile
per il paziente.
2.3
Ultrasonografia (US )
L’imaging ultrasonoro utilizza onde acustiche ad alta frequenza (circa 1 - 10 MHz) e i loro
echi per produrre immagini che mostrano il movimento di organi e tessuti in tempo reale. A
24
Figura 2.7: Schema a blocchi di un sistema di imaging a Ultrasuoni.
differenza delle onde elettromagnetiche come raggi x e raggi γ, e similmente alla Risonanza
Magnetica, la radiazione ultrasonora è non ionizzante, dunque considerata sicura alle intensità
utilizzate nei sistemi di imaging clinico.
Le immagini a ultrasuoni sono costruite calcolando il tempo impiegato dagli impulsi per
viaggiare all’interno del corpo del paziente e per tornare alla sonda dopo la riflessione. Gli
impulsi, generalmente lunghi 1 - 5 µs, sono generati da un trasduttore che comprende un
cristallo piezoelettrico (quasi sempre in piombo-zirconato di titanio, P ZT ), compreso tra due
elettrodi. Un basso segnale di tensione sinusoidale applicato al cristallo lo fa risuonare e gli
permette di produrre onde sonore grazie alle microdeformazioni delle sue superfici. Il cristallo
è inoltre in grado, oltre a generarle, di ricevere e identificare le onde sonore, producendo una
risposta che assume la forma di un segnale elettrico variabile. Un tipico impulso (1 µs di
durata con una frequenza di 5 MHz) contiene 5 cicli d’onda. Gli impulsi vengono generalmente
distanziati tra loro di almeno 1 ms; ciò risulta in un rate di ripetizione degli impulsi di 1
kHz, che viaggiano attraverso i tessuti molli con una velocità di circa 1540 m/s.
Le onde sonore sono onde longitudinali, cioé le particelle a loro associate si muovono
avanti e indietro nella stessa direzione in cui l’onda si sta propagando. La velocità del suono
in un materiale (v) è caratteristica del materiale e dipende dalla sua densità (ρ) e dalla sua
comprimibilità (K). Più è facile comprimere un materiale, maggiore è la sua comprimibilità.
Dunque:
v=√
1
Kρ
(2.2)
Volendo effettuare un confronto tra osso e tessuto molle, si osserva che il primo possiede
maggior densità ma un fattore di comprimibilità molto minore. Il prodotto Kρ è minore
dunque per l’osso, e ciò determina una maggiore velocità delle onde sonore che si propagano
attraverso esso.
25
Figura 2.8: Diagramma schematico di un tipico raggio a Ultrasuoni per uso clinico (After
Wolbarst, 1993, p. 408).
Quando un’onda ad Ultrasuoni incontra una discontinuità superficiale tra due tessuti con
diverse proprietà acustiche, una frazione dell’onda viene riflessa e detettata dal trasduttore
(lo stesso che ha emesso l’impulso). Quelle onde che ottengono una riflessione di circa 180o
danno origine all’immagine. Infatti misurando il ritardo tra la generazione dell’impulso e la
ricezione dell’onda riflessa, conoscendo la velocità di propagazione si può calcolare la profondità del tessuto in esame. Inoltre l’intensità dell’eco (onda riflessa) determina la luminosità
dell’immagine.
L’intensità di un’onda riflessa (di circa 180o ) da una discontinuità tra due tessuti può
essere ricavata mediante il coefficiente di riflessione (R),
R=
(Z1 − Z2 )2
(Z1 + Z2 )2
(2.3)
dove Z1 e Z2 sono le impedenze acustiche dei due tessuti. L’impedenza acustica (considerata costante per molti materiali) è data dalla seguente formula:
r
Z = ρv =
ρ
K
(2.4)
Più due tessuti adiacenti (la cui superficie di separazione dà origine all’eco) sono acusticamente simili, minore è la riflessione. Al contrario due tessuti con impedenze acustiche molto
diverse fra loro originano un eco più intenso. Ad esempio, all’interfaccia tra osso e tessuto
molle il segnale riflesso ha un’alta intensità, pari anche al 40% dell’intensità dell’impulso
emesso dalla sonda (detto onda incidente). Ciò attenua molto (di circa il 60%) il segnale trasmesso al di sotto delle strutture ossee, rendendo estremamente difficile la visualizzazione dei
tessuti sottostanti. All’interfaccia tessuto/aria circa il 99% dell’onda viene riflessa, rendendo
addirittura impossibile scandagliare strutture distalmente più profonde rispetto a polmoni o
bolle d’aria.
L’onda ultrasonora non perde in intensità solo all’interfaccia tra due tessuti diversi, ma subisce una continua attenuazione anche mentre si propaga all’interno di un solo mezzo. Questo
decadimento (dovuto a fenomeni di scattering e di assorbimento) è, in prima approssima26
Figura 2.9: L’impulso ecografico subisce una continua attenuazione lungo il suo cammino
ed un improvviso cambiamento di intensità nel processo di riflessione all’interfaccia tra due
tessuti diversi (After Wolbarst, 1993, p. 408).
zione, esponenziale. L’intensità del raggio (I) diminuisce con l’aumentare della distanza di
propagazione (x) rispetto al suo valore iniziale in x0 (I0 ) secondo la seguente legge:
I = I0 e−µx
(2.5)
dove il coefficiente di attenuazione (µ) è di solito espresso in [dB cm−1 ] invece che in
[cm−1 ]. Dunque:
1
µ [dB cm−1 ] = − 10 ∗ lg
x
I(x)
I0
= 4.343 ∗ µ [cm−1 ]
(2.6)
Il coefficiente di attenuazione è caratteristico del materiale ed è proporzionale alla frequenza per molti tessuti (maggiore è la frequenza, maggiore è il coefficiente di attenuazione).
Dunque aumentare la frequenza dell’ultrasuono riduce la profondità di penetrazione, anche
se migliora la risoluzione spaziale. Questo principio è alla base della progettazione di qualunque sistema ad ultrasuoni: la regola d’oro è utilizzare la massima frequenza che permette di
raggiungere la profondità necessaria a mostrare sull’immagine finale la struttura anatomica
di interesse.
Per evitare di confondere l’attenuazione esponenziale dell’onda che propaga in un mezzo
omogeneo con l’attenuazione dovuta alla riflessione all’interfaccia tra due tessuti con diverse
impedenze acustiche (che è utilizzata per definire l’intensità dell’immagine), si può compensare il primo tipo di attenuazione con un sistema a guadagno temporale detto TGC (Time
Gain Compensation). Il TGC amplifica il segnale eco in funzione del tempo di volo, compensando la continua attenuazione (dovuta a fenomeni di scattering e di assorbimento) lungo il
percorso dell’onda. Usare gli echi per ricavare le profondità delle interfacce tra i vari tessuti
presenti sul cammino dell’onda è il principio alla base della modalità di ultrasonografia A
(Amplitude, Ampiezza).
Un utilizzo più comune nella pratica clinica è il modo di imaging ultrasonoro B (Brightness,
Luminosità). Viene utilizzato per produrre un’immagine 2D di una struttura anatomica
spazzando il raggio avanti e indietro ripetutamente attraverso il corpo del paziente.
27
Figura 2.10: Schema di un array di cristalli piezoelettrici utilizzati nello scanning B-mode
( Digital Image Processing for Medical Applications, Prima Edizione, Geoff Dougherty,
2009).
Ogni spazzata è utilizzata per creare una singola linea verticale dell’immagine B-mode.
Ogni linea comprende un certo numero di pixel la cui luminosità è determinata dall’intensità
degli echi riflessi, dopo aver corretto l’attenuazione lungo il cammino del raggio compensando
il guadagno mediante il T GC. Il movimento di spazzata del raggio è ottenuto o meccanicamente (utilizzando ad esempio un trasduttore rotante) o elettronicamente (utilizzando un
array di elementi piezoelettrici). Generalmente nel B-mode vengono acquisite, muovendo il
raggio ultrasonoro, da 128 a 256 linee verticali per immagine. Il tempo necessario ad acquisire
gli echi lungo una singola linea è dell’ordine dei 100 µs; dunque l’acquisizione di una singola
immagine ha una durata di decine di millisecondi. Grazie a questi tempi brevi, il continuo
movimento oscillatorio del raggio permette all’immagine ottenuta di essere visualizzata praticamente in tempo reale. Immagini ad ultrasuoni in tre dimensioni possono essere ottenute
aggiungendo ulteriori righe di cristalli all’array della sonda, permettendole di scansionare
anche la direzione perpendicolare al piano dell’immagine B-mode basale (ossia quella ottenuta dalla riga centrale dell’array).
La risoluzione spaziale lungo la direzione di propagazione dell’ultrasuono è detta risoluzione
assiale. E’ definita come la più vicina separazione di due superfici in quella direzione che
permette di distinguere due distinti segnali riflessi, ed è uguale a metà della lunghezza spaziale dell’impulso. Più corto è l’impulso, migliore è la risoluzione assiale dell’immagine. La
risoluzione nel piano perpendicolare alla direzione di propagazione è nota come risoluzione
laterale. E’ determinata dalla diffrazione del raggio ad ultrasuoni dalla sua dimensione trasversale iniziale. Il fenomeno della diffrazione causa la divergenza del raggio di un angolo di
circa sin−1 1.2 ∗ λd , dove d è il diametro del traduttore. La diffrazione inoltre porta alla
generazione di lobi laterali nello spettro di potenza del segnale, che a loro volta conducono ad
una diminuzione di energia del raggio principale e possono quindi introdurre artefatti sull’immagine. Dal momento che un singolo cristallo del trasduttore ha tipicamente un diametro
di 1 - 5 cm, la risoluzione laterale è intrinsicamente molto povera. Può essere migliorata
focalizzando il raggio, ad esempio fabbricando la superficie esterna del cristallo (quella che
andrà a contatto con l’epidermide del paziente) concava invece che piana.
Il rapporto segnale-rumore del segnale riflesso dipende dall’intensità e dalla larghezza di banda dell’impulso, dal grado di smorzamento del trasduttore (che può essere ridotto migliorando
il contatto tra sonda e paziente) e dal grado di focalizzazione del raggio. Il contrasto può
28
essere migliorato utilizzando agenti di contrasto per ultrasonografia, che generalmente consistono in microsfere o microbolle con un diametro minore di 10 µm iniettate direttamente nel
flusso ematico. Le microsfere, piene d’aria, aumentano l’intensità degli echi provenienti dal
sangue e, date le loro dimensioni ridotte, non causano alcun rischio di embolia per il paziente
e il loro smaltimento risulta essere rapido e senza effetti collaterali.
Gli artefatti sull’immagine finale possono originare da un certo numero di effetti. Ad esempio,
materiali altamente riflettenti come osso o aria possono causare riverberi che si manifestano
sotto forma di linee equidistanti ad alta luminosità sull’immagine. Oppure, ombre acustiche
possono manifestarsi quando un’oggetto altamente riflettente (come l’interfaccia gas/tessuto)
o una struttura molto attenuante nascondono un organo posto più in profondità.
Numerose sono le tecniche basate sugli ultrasuoni volte ad indagare la vascolarizzazione di
determinate strutture anatomiche. Si trattano brevemente in seguito le principali.
2.3.1
CEUS
Il CEU S (Contrast Enhancement Ultrasound ) sfrutta l’iniezione per via endovenosa del mezzo di contrasto (microbolle). Questo permette, per tempi brevi (il washout è dell’ordine di
alcune decine di secondi), di osservare come il mezzo di contrasto si distribuisce all’interno ad esempio di una lesione sospetta. Sulla base di tale osservazione è possibile ottenere
informazioni di tipo funzionale sul suo carattere vascolare e sulla sua captazione.
2.3.2
Flussimetria Doppler
Un altro importante gruppo di tecniche, che non prevede invece l’utilizzo di agenti di contrasto, è basato sul principio Doppler (Flussimetria Doppler ). Mentre le immagini ecografiche
sono generalmente morfologiche, le immagini basate sulla flussimetria Doppler sono di tipo
funzionale. Con la flussimetria è possibile misurare la velocità di un fluido (sangue). Dunque,
qualunque ecografo dotato di modalità Doppler permette di misurare la velocità del sangue
in modo non ionizzante e non invasivo. Il principio Doppler ha alla base un moto relativo
tra una sorgente ed un ricevitore. La sorgente emette radiazioni ad una certa frequenza e la
frequenza percepita dal ricevitore è uguale a quella emessa dalla sorgente solo se i due sono
solidali (non c’è moto relativo). Se invece il fluido (sangue), muovendosi, si avvicina alla
sorgente, la sonda percepisce una frequenza più alta (viceversa se il fluido si allontana dalla
sonda). Dunque la frequenza è percepita in modo proporzionale alla velocità del fluido. Per
garantire la validità del principio Doppler, si ricorda che deve sempre esserci moto relativo
tra il dispositivo che emette gli impulsi e il dispositivo ricevente. Nel caso dell’ultrasonografia
Doppler, sorgente e ricevitore coincidono e si identificano nella sonda a ultrasuoni. Si sfrutta
quindi il fatto che, tra il momento in cui emette e il momento in cui riceve, il sangue si è
spostato. Se il sangue si è spostato allontanandosi dalla sonda, la sonda riceverà una frequenza più bassa, e viceversa. L’interesse è nel misurare la velocità della parte corpuscolata del
sangue (in particolar modo dei globuli rossi, i più numerosi). Dunque, parlando di velocità
ematica, si parla sempre della velocità degli eritrociti. Tali particelle, colpite dall’ultrasuono,
rimandano verso la sonda una frequenza più alta o più bassa a seconda che si siano avvicinati
o allontanati dalla sonda. In quanto tecnica ad ultrasuoni, è importante la lunghezza d’onda
dell’impulso (la lunghezza d’onda è la massima dimensione dell’oggetto che può interagire con
l’ultrasuono). La frequenza deve essere alta per avere una lunghezza d’onda piccola (e dunque
per avere buona risoluzione spaziale). Inoltre la piccola dimensione media di un eritrocita
(10 µm) non permette di generare riflessione dell’onda ma solo la sua diffusione; questa è
un’importante differenza tra la flussimetria (dove si sfrutta dunque la diffusione dell’onda) e
l’ultrasonografia tradizionale (dove viene sfruttata invece la sua riflessione).
Si consideri un globulo rosso che passa al di sotto del fascio ad ultrasuoni; colpito, distribuisce la radiazione in tutte le direzioni (anche verso la sonda). L’obiettivo delle inda29
Figura 2.11: Misura della velocità di un volume di sangue con flussimetria Doppler (After
Wolbarst, 1993, p. 437).
gini flussimetriche è misurare la velocità dell’eritrocita. La frequenza percepita dalla sonda
(dell’ordine dei kHz) vale
2f0 v
cosθ
(2.7)
c
dove la frequenza f0 è quella generata dalla sonda (ad esempio, 10 MHz), la velocità dell’eritrocita è indicata con v, il parametro c indica la velocità di propagazione degli ultrasuoni
nei tessuti (circa 1540 m/s) e l’angolo θ è l’angolo formato tra l’asse del fascio ultrasonoro e
il vettore velocità dell’eritrocita. Si noti come, in accordo con il pricipio Doppler, se il sangue
non si muovesse la frequenza percepita dalla sonda sarebbe nulla. L’obiettivo della flussimetria è calcolare la velocità v a partire dalla frequenza percepita dalla sonda. Il problema
risiede nel conoscere con precisione l’angolo θ, in quanto risulta difficile sapere con certezza
l’asse del vaso (cioè il vettore velocità del globulo rosso). Per superare tale ostacolo, l’angolo
viene aggiustato di volta in volta in base a come è stata posizionata la sonda sul vaso di
interesse. Inoltre si noti come non sia possibile posizionare la sonda perpendicolarmente al
vaso (il termine in coseno si annullerebbe e non verrebbe percepita nessuna frequenza diffusa).
L’ideale sarebbe mettere la sonda parallela all’asse del vaso, ma ciò risulta di difficile (se non
impossibile) applicazione per molti distretti corporei. In genere il medico deve mantenere la
posizione della sonda in un intervallo compreso tra i 40o e i 60o , in modo da compiere un
errore lineare sull’angolo e dunque ottenere un errore lineare sulla velocità e sulla frequenza.
Inoltre, al fine di misurare la frequenza Doppler, tutti i flussimetri sono dotati di un dispositivo demodulatore che agisce da filtro passabasso e che permette di eliminare le componenti
frequenziali ad alta frequenza (cioé quelle emesse dalla sonda). Una volta ricavata la sola
frequenza percepita (ossia la frequenza Doppler, fD ) è possibile calcolare la velocità dell’eritrocita.
Nel flusso ematico sono però presenti milioni di eritrociti ed ognuno di essi si muove con una
sua propria velocità.
Alla sonda arriveranno dunque milioni di segnali, ognuno per ogni eritrocita e ognuno con
una propria frequenza. Dunque il processo di demodulazione va ripetuto per ogni frequenza
fD ricevuta dalla sonda. Come risultato non si ottiene una singola linea di frequenza ma uno
spettro continuo che mostra la distribuzione delle frequenze Doppler all’interno del segnale
rilevato. Da tale spettro è possibile ottenere varie misure di velocità del flusso ematico per
il vaso indagato (massima, media, minima). Inoltre l’area sottesa allo spettro (o energia del
segnale) è proporzionale al numero di eritrociti sentiti dalla sonda (e dunque al flusso). Grazie
fD =
30
Figura 2.12: Schema del flusso ematico laminare (sopra) e turbolento (sotto).
alle informazioni fornite dallo spettro di frequenze è inoltre possibile capire se il flusso all’interno di un vaso è di tipo laminare (sinonimo di normale funzionamento della rete vascolare)
o turbolento (spesso indicatore di patologie o comunque di anomalie del sistema vascolare).
Tradizionalmente si distinguono due tipologie di flussimetri, ad onda continua e ad onda
pulsata. I flussimetri ad onda continua emettono impulsi in modo continuo nel tempo, garantendo un elevato campionamento. E’ conveniente utilizzarli per indagare distretti corporei
dove sono attese repentine variazioni di velocità ematica. Però, con tale tipo di flussimetri
non è possibile selezionare la profondità di scansione, rendendo ad esempio impossibile la
distinzione tra vene e arterie.
I flussimetri ad onda pulsata invece, oltre a poter distinguere le vene dalle arterie, permettono
anche di osservare la velocità ematica solo in una porzione del vaso. Dal momento che, in
genere, il sangue presenta un flusso prevalentemente laminare (con velocità dei corpuscoli
maggiore al centro), può essere utile, ad esempio per un’arteria, studiare solo gli eritrociti
al centro del vaso. La sonda emette un impulso, poi si ferma e calcola il tempo di volo del
segnale diffuso dagli eritrociti che si trovano all’interno di un volume campione (posizionato
al centro del vaso). Tutti i segnali che cadono all’interno di una certa finestra temporale
vengono mandati al demodulatore, mentre gli altri vengono scartati. In questo modo solo i
segnali Doppler di una determinata porzione del vaso (posta ad una certa profondità) verrano rilevati. I dispositivi ad onda pulsata introducono una nuova variabile detta P RF (Pulse
Repetition Frequency), che è la frequenza con cui vengono inviati gli impulsi dalla sonda (da
non confondere con la frequenza propria dell’ultrasuono). In genere la P RF ha valori al più
di qualche decina di kHz (si ricorda che la frequenza dell’ultrasuono è invece dell’ordine dei
MHz). L’inverso della P RF è detto P RP , ed è il periodo di ripetizione degli impulsi.
Nei flussimetri ad onda pulsata, dunque, la sonda emette l’impulso per un determinato periodo temporale e successivamente si mette in modalità di ricezione dei segnali Doppler generati
dal sangue. Generalmente il tempo trascorso in ricezione è molto maggiore rispetto al tempo
di emissione (con un duty cycle anche inferiore all’1%). Mantenere una finestra di ricezione
ampia è un vantaggio: è possibile modulare tale finestra temporale in cui l’eco (che è funzione della profondità) viene ricevuto, scartando cosı̀ gli impulsi troppo profondi, se lo si
desidera. Lo svantaggio dei dispositivi ad onda pulsata risiede nella loro limitata frequenza di campionamento del segnale, che corrisponde alla P RF . In accordo con il teorema
di Nyquist-Shannon e ricordando che la frequenza Doppler è proporzionale alla velocità del
fluido, la limitata frequenza di campionamento può introdurre errori di aliasing se il sangue
presenta flussi di intensità troppo elevata (tale problema invece non si presenta nei dispositivi
ad onda continua).
Oltre allo spettro del segnale Doppler, esistono due codifiche colore per rappresentare la velocità del sangue in un certo distretto vascolare.
Nella codifica Color Doppler ogni punto in cui si riceve un segnale viene colorato (dunque solo
31
dove è percepita una particella in movimento). I colori utilizzati sono solo il rosso e il blu. I
flussi in direzione concorde con la direzione di propagazione della radiazione ultrasonora sono
in blu (generalmente sono le vene, in riferimento all’ambito cardiologico). I flussi invece in
direzione opposta a quella di propagazione degli ultrasuoni vengono colorati in rosso (che in
genere, sempre relativamente all’ambito cardiologico, sono le arterie). L’intensità del colore
indica il modulo della velocità.
Nella codifica Power Doppler invece non interessano più velocità o direzione, ma il flusso (che
è proporzionale all’area sottesa alla trasformata di Fourier del segnale Doppler ricevuto dalla
sonda). Dove l’intensità è maggiore (colore più chiaro) vi è un maggior numero di eritrociti
che si muovono (e dunque il flusso è maggiore). La codifica Power, nonostante fornisca meno informazioni rispetto alla codifica Color, è indipendente dall’angolo θ (perché l’area dello
spettro del segnale è sempre la stessa, indipendentemente dall’angolo d’inclinazione della sonda). Dunque tale codifica risulta più comoda e versatile, molto utilizzata in quei distretti (ad
esempio, nella tiroide) dove è difficile conoscere l’angolo di inclinazione della sonda.
Entrambe le codifiche colore sono molto utili per visualizzare il grado di vascolarizzazione di
una lesione, e possono fornire indicazioni (anche se grossolane) sul suo grado di malignità.
2.3.3
Imaging Fotoacustico
L’imaging fotoacustico (P AI, Photoacustic Imaging) è una nuova tecnica non ancora consolidata nella pratica clinica routinaria. E’ una modalità di imaging non invasiva, non ionizzante,
che combina l’elevata sensibilità dell’imaging ottico con l’eccellente risoluzione spaziale derivante dall’utilizzo di segnali acustici. Il fenomeno fisico che sta alla base di tale tecnica
è l’effetto fotoacustico, ovvero la generazione di onde acustiche in seguito all’assorbimento
di energia elettromagnetica inviata ad intermittenza. Nel P AI i campioni biologici vengono
illuminati con un laser a impulsi brevi della durata di alcuni nanosecondi (short-pulsed laser ) in grado di produrre onde sonore ad alta frequenza (ultrasuoni). Si utilizzano in genere
lunghezze d’onda nel campo della luce visibile, nella zona vicina all’infrarosso ed alle radiofrequenze. In queste regioni infatti le radiazioni non sono ionizzanti per i tessuti biologici e
dunque non rappresentano un pericolo per la salute. I tessuti assorbono la luce in base alle
caratteristiche della loro composizione. In seguito all’assorbimento intermittente di energia,
i campioni in esame sono soggetti ad un transitorio incremento della temperatura (circa 10
mK) e quindi ad un’espansione termoelastica dalla quale si originano onde fotoacustiche.
Questi segnali acustici vengono rilevati mediante un trasduttore a banda larga il quale, posto
vicino al campione, quantifica la distribuzione dell’assorbimento ottico nel campione e ne
identifica la geometria. La tecnica di imaging fotoacustico è in grado di fornire immagini ad
elevata risoluzione spaziale e con un buon contrasto ottico fino a circa 5 cm di profondità nei
tessuti biologici.
2.3.4
Angiografia Acustica
L’angiografia acustica è un’altra tecnica ancora in fase sperimentale, basata però sull’utilizzo
di mezzi di contrasto a microbolle. La differenza rispetto ad un normale esame CEU S sta nel
fatto che le microbolle vengono eccitate ad una certa frequenza (2 - 4 MHz), mentre gli echi
vengono acquisiti da un secondo trasduttore, montato sulla stessa sonda, ad una frequenza
maggiore (25 - 30 MHz). Ciò permette di ottenere immagini con un grado di morfologia molto
più elevato rispetto al CEU S, che invece produce immagini funzionali (mostrando come un
certo distretto assorbe il mezzo di contrasto). Le microbolle, iniettate sempre nel sistema circolatorio per via endovenosa, vengono eccitate dall’impulso emesso e producono un’energia a
larga banda che viene ricevuta dal secondo trasduttore, mentre i tessuti circostanti scatterano
ad una energia trascurabile per le alte frequenze. In questo modo è possibile visualizzare solo
i vasi sanguigni sull’immagine finale. L’accuratezza di questa tecnica innovativa è di gran
lunga migliore rispetto al CEU S o al tradizionale B-mode. La risoluzione è alta, simile a
32
quella tipica degli angiogrammi ottenuti a raggi x (ma, dal momento che l’angiografia acustica
utilizza l’ultrasuono come energia di eccitazione, i rischi per il paziente sono molto minori).
La risoluzione migliore rispetto ad altre tecniche ad ultrasuoni è ottenuta grazie al secondo
trasduttore che acquisisce gli echi ad una frequenza maggiore rispetto a quella dell’impulso
emesso (occorre in ogni caso sempre cercare un compromesso, in quanto maggiore è la frequenza e minore è la massima profondità di scansione raggiungibile). Un ulteriore vantaggio
della tecnica, legato alla sua buona risoluzione, è la possibilità di indagare anche microvasi
neoformati. Dal momento che, generalmente, nei tumori ad alto grado di malignità sono
presenti alte concentrazioni di fattori di crescita (F GF , V EGF ) che stimolano l’angiogenesi,
l’angiografia acustica risulta adatta alla visualizzazione ed alla diagnosi di sospette neoplasie.
Nonostante i grandi vantaggi, il limite maggiore è il limitato potere di penetrazione dell’onda a ultrasuoni, dovuto alle alte frequenze utilizzate. Ma, dal momento che la massima
profondità di penetrazione può essere aumentata abbassando la frequenza (e dunque perdendo in risoluzione), la tecnica risulta comunque abbastanza flessibile, modulabile e dunque
promettente.
33
Capitolo 3
Vascolarizzazione e architettura
vascolare di una lesione neoplastica
In questo capitolo si analizzeranno brevemente i caratteri morfologici e funzionali (in termini
di vascolarizzazione) dei tumori, con particolare enfasi sui noduli tiroidei. Si introdurrà
quindi un breve paragrafo sugli studi di perfusione e sulla ricostruzione in Computer Vision
propedeutico alle tecniche descritte nei prossimi capitoli.
3.1
Confronto tra circolazione ematica nei tessuti sani e vascolarizzazione tumorale
La vascolarizzazione dei tumori solidi è profondamente diversa da quella dei tessuti sani. Un
modo efficace per la diagnosi di primo livello e differenziale di una sospetta lesione può dunque andare ad indagare la sua architettura vascolare. Il sangue si distribuisce ed alimenta i
normali tessuti sani del corpo grazie ad un’efficiente ed organizzata rete vascolare, il sistema
cardio-circolatorio. Il sangue scorre attraverso un percorso chiuso che parte dal cuore (ventricolo sinistro), continua nell’aorta e si distribuisce nelle arterie, arteriole e capillari. Passando
nei vari distretti corporei il sangue scambia ossigeno con anidride carbonica; deossigenato,
si reimmette quindi nel cuore (atrio destro) attraverso l’albero venoso. Successivamente, dal
ventricolo destro, attraversando la circolazione polmonare (o piccola circolazione), si dirige
verso i polmoni dove può ossigenarsi e raccogliersi quindi di nuovo nel cuore (atrio sinistro)
da cui ricomincerà il suo percorso (Figura 3.1).
La crescita e l’organizzazione dei vasi sanguigni sono regolate dalla domanda metabolica dell’organismo, che stimola la produzione di fattori molecolari pro-angiogenici o antiangiogenici in funzione dei fabbisogni del corpo. Inoltre il sistema linfatico contribuisce alla
pulizia dei vasi rimuovendo dal loro lume i rifiuti metabolici e drenando i liquidi in eccesso.
La microstruttura che risulta da questi processi presenta un alto grado di ordine gerarchico,
con i vasi più maturi distribuiti equamente nei distretti corporei, permettendo un’adeguata
perfusione di ossigeno e altri nutrienti a tutte le cellule dei tessuti.
Nei tumori la crescita aggressiva della popolazione di cellule neoplastiche (e l’associata sovraespressione di fattori di crescita pro-angiogenici) conduce allo sviluppo di reti vascolari
disorganizzate e anarchiche che assumono dunque un aspetto diverso rispetto a quelle dei
tessuti sani. La vascolarizzazione tumorale si distingue per le dinamiche di crescita aberrante
e per la presenza di vasi sanguigni ancora immaturi, tortuosi e molto permeabili ai nutrienti.
Tali vasi costituiscono un labirinto in cui la gerarchia tradizionale che normalmente li distinguerebbe in arterie, arteriole e capillari non sussiste. Inoltre presentano diametri molto piccoli
e forme irregolari, con restringimenti e vicoli ciechi. In modo analogo, i canali del sistema
linfatico diventano deboli e discontinui e non garantiscono più un buon drenaggio dei liquidi
34
Figura 3.1: Schema della circolazione sanguigna in un organismo umano ( urgo.co.uk).
in eccesso dai vasi sanguigni, i quali possono quindi dilatarsi in alcuni punti aumentando il
grado di disordine e riducendo la propria funzionalità. Questa crescita incontrollata dei vasi
sanguigni nei distretti tumorali è dovuta al continuo proliferare delle cellule neoplastiche, che
necessitano di sempre maggior ossigeno e nutrienti. La velocità con la quale questi neo-vasi
sono costretti a formarsi per soddisfare tali richieste è causa del disordine strutturale e dell’assenza di una gerarchia.
Generalmente il meccanismo con il quale avviene la formazione dei vasi sanguigni in un tumore è l’angiogenesi. Questo processo, tipico dell’organismo adulto, consiste nello sviluppo di
nuovi vasi sanguigni a partire da altri già esistenti. La formazione di un vaso passa attraverso
diversi stadi ben definiti, caratterizzati da modificazioni dell’endotelio e della matrice extracellulare. Le cellule endoteliali migrano e proliferano nella zona di tessuto dove si necessita la
formazione di nuovi vasi; successivamente tali cellule si differenziano e cominciano a formare
i primi capillari. Infine vi è un richiamo di cellule subendoteliali di supporto, quali periciti e
cellule della muscolatura liscia, che terminano il processo di formazione. Lo stimolo di inizio
dell’angiogenesi arriva dalle cellule tumorali stesse, che producono in modo incontrollato dei
fattori di crescita detti angiopoietine (tra i più importanti si ricordano l’Ang-1 e il VEGF,
Vascular Endothelial Grow Factor ), i quali stimolano e favoriscono la formazione di nuovi
vasi.
Va citato un altro processo che, secondo recenti studi, è probabilmente coinvolto nel processo di vascolarizzazione che accompagna lo sviluppo di un tumore: la vasculogenesi. E’ un
processo che normalmente si verifica durante lo sviluppo embrionale, mediante il quale i vasi
sanguigni originano de novo, ossia senza partire da vasi sanguigni preesistenti. Recentemente
si è scoperto che la vasculogenesi può verificarci anche nell’organismo adulto. Sono state
infatti identificate in circolo delle cellule progenitrici endoteliali (derivate da cellule staminali) in grado di contribuire alla neovascolarizzazione, ad esempio a seguito di un trauma o
35
Figura 3.2: Schema dello sviluppo di un tumore. Si origina da un piccolo gruppo di cellule
neoplastiche con alto potenziale replicativo (A), che successivamente secernono fattori angiogenici per stimolare la crescita di nuovi vasi sanguigni (B). Il tumore può cosı̀ trarre i
nutrienti di cui ha bisogno per crescere sfruttando il sistema circolatorio e, quando diventa
grande abbastanza, può iniziare a metastatizzare (sempre attraverso la rete vascolare) creando
altri siti tumorali in nuovi distretti corporei (C). Immagine tratta da angioworld.com.
durante, appunto, lo sviluppo tumorale.
Funzionalmente, l’abilità dei vasi sanguigni tumorali di distribuire nutrienti e di rimuovere
i prodotti di scarto attraverso il sistema linfatico è drasticamente più bassa di quella di un
tessuto sano. Infatti i vasi tumorali, spesso non ancora maturi, presentano un rivestimento
incompleto nella tunica di cellule muscolari lisce (che costituiscono lo strato più esterno del
vaso) e numerose discontinuità tra gli strati di cellule endoteliali (che costituiscono lo strato
più interno della parete vascolare). Ciò comporta una maggiore permeabilità del vaso, che
a sua volta causa un’intensità troppo alta delle forze osmotiche che si esercitano sulle sue
pareti. Queste forze intense fanno sı̀ che i fluidi si accumulino all’interno dei vasi tumorali,
aumentando cosı̀ la pressione del liquido interstiziale. Inoltre, le variabili resistenze idrauliche (dovute alla geometria irregolare) causano repentine variazioni della velocità del flusso
ematico portando il regime laminare (tipico dei flussi nei tessuti sani) verso la turbolenza
(moto caotico) e lasciando delle zone prive di ossigeno (fenomeno di ipossia).
Le caratteristiche della vascolarizzazione tumorale, per quanto distruttive per l’organismo se
il tumore non viene rimosso in tempi brevi, possono essere sfruttate per mettere a punto
tecniche diagnostiche e terapeutiche. Dal punto di vista terapeutico, ad esempio, ci sono
alcuni filoni di ricerca che sviluppano microparticelle caricate con un farmaco chemioterapico
(ad esempio la doxorubicina) da rilasciare in situ sfruttando proprio il trasporto vascolare
del tumore, e altri che invece cercano di contrastare i fattori di crescita angiogenici al fine di
bloccare la crescita dei vasi sanguigni (senza il trasporto dato dal sangue il tumore non potrebbe ricevere i nutrienti di cui ha bisogno). Dal punto di vista diagnostico si possono invece
mettere a punto dispositivi software per visualizzare in modo chiaro l’architettura vascolare
del tumore (per identificarlo nei più brevi tempi possibili) e per estrarre caratteri quantitativi
(come tortuosità, angoli, ramificazioni, numero di letti vasolari) per procedere alla diagnosi
differenziale.
36
3.2
Noduli tiroidei
Quanto descritto nel paragrafo precedente si adatta ad ogni tipo di tumore, cosı̀ come le
tecniche che verranno descritte nei seguenti capitoli possiedono un certo grado di versatilità
diagnostica, rendendosi applicabili a più di una modalità di imaging e a diversi distretti corporei. Tuttavia la disponibilità, nell’ambito di questo lavoro di tesi, di casi reali di pazienti
con sospette neoplasie tiroidee rende necessaria una breve descrizione dei noduli alla tiroide.
I noduli tiroidei sono ingrossamenti ben circoscritti e delimitati di parti (anche molto piccole)
della tiroide. Nel corso della vita noduli di dimensione variabile si sviluppano nella tiroide di
moltissimi pazienti, assumendo caratteri di malignità in un numero limitato di casi. Seppur
rara e spesso curabile in modo definitivo, l’eventualità che un nodulo tiroideo nasconda un
cancro della tiroide spaventa gran parte dei pazienti che ricevono una diagnosi di patologia
nodulare tiroidea. La patologia nodulare tiroidea è un disordine piuttosto eterogeneo per
quanto riguarda gli aspetti clinici, funzionali ed istologici. I noduli tiroidei, infatti, possono
essere singoli o multipli (gozzo multinodulare), iper, normo od ipo-funzionanti, benigni o maligni, di grandi o piccole dimensioni, sintomatici od asintomatici. Possono inoltre insorgere
nell’ambito di una tiroide di normali dimensioni oppure in una ghiandola ingrossata, cioè in
un gozzo. Generalmente il paziente non accusa alcun sintomo riconducibile alla presenza dei
noduli, che scopre casualmente notando la presenza di una tumefazione del collo o durante
accertamenti medici. A volte, in presenza di uno o più noduli voluminosi, il paziente può
lamentare sintomi e disturbi da compressione, come dolore o difficoltà a deglutire e a respirare. Se il nodulo è iperfunzionante (secerne elevate quantità di ormoni tiroidei) il paziente
avverte i sintomi classici dell’ipertiroidismo: nervosismo, tremori, iperidrosi, intolleranza al
caldo, astenia, perdita di peso, aumento dell’appetito, tachicardia. Sebbene esista una certa
variabilità in merito alla diffusione dei noduli tiroidei nella popolazione, in base alle informazioni bibliografiche raccolte, derivate dalla letteratura scientifica più accreditata, è possibile
fissare alcuni concetti chiave:
• I noduli tiroidei sono molto frequenti nella popolazione generale ed aumentano nelle
aree a carenza iodica; sono inoltre più comuni nel sesso femminile rispetto a quello
maschile.
• La prevalenza di noduli palpabili nella popolazione adulta generale è circa del 3-7%, con
una frequenza del 6,4% nelle femmine e dell’1,5% nei maschi. Nelle aree a carenza iodica
aumenta sia la diffusione della patologia nodulare tiroidea che il rischio di malignità.
• Se nelle statistiche epidemiologiche vengono inclusi anche i noduli clinicamente non
rilevabili (a causa delle piccole dimensioni), diagnosticabili con moderne tecniche di
imaging, la prevalenza dei noduli tiroidei nella popolazione è molto più alta, stimabile
in un 30-60%.
• Solo il 5-10% di tutti i noduli sono maligni.
• I noduli tiroidei sono rari nei bambini e negli adolescenti (diffusi in circa l’1,5% della popolazione), mentre la loro incidenza aumenta in modo abbastanza lineare con
l’invecchiamento.
I seguenti fattori di rischio aumentano le probabilità che i noduli tiroidei abbiano carattere
maligno, sebbene da soli non siano sufficienti per porre diagnosi di carcinoma tiroideo:
• Il paziente presenta una storia famigliare di cancro alla tiroide.
• Il paziente presenta una storia di precedenti irradiazioni (radioterapia) o esposizione ad
alte dosi di radiazioni ionizzanti ambientali.
• Il paziente è un fumatore.
37
• Quando si rileva un nodulo tiroideo singolo in un bambino, in un adolescente (meno di
20 anni) o in un anziano (più di 60 anni).
• Inspiegabile raucedine o stridore associato al gozzo.
• Massa tiroidea che cresce rapidamente in poche settimane.
• Linfadenopatia palpabile laterocervicale (ingrossamento dei linfonodi del collo).
• Un nodulo tiroideo risulta essere più frequentemente maligno nel maschio rispetto alla
femmina.
• Il rischio di malignità è considerato inferiore nel gozzo multinodulare (presenza di più
noduli tiroidei) rispetto a quello singolo.
• Presenza di un nodulo fisso di consistenza dura ed elevata alla palpazione, con scarsa
mobilità sui piani sottostanti.
• L’85-95% dei noduli tiroidei palpabili si presenta freddo all’esame scintigrafico, il che
denota ipofunzionalità degli stessi in termini di secrezione ormonale. Nel 5-10% dei casi,
il nodulo è invece iperfunzionante, ovvero secerne quantità superiori di ormoni tiroidei
rispetto al resto della ghiandola. Il rischio di malignità è superiore per i noduli freddi
(5-8% dei casi), mentre solo lo 0,5-1% dei noduli caldi si rivela maligno.
• In genere, se il diametro supera i 20 mm, c’è sospetta neoplasia.
I medici hanno a disposizione vari strumenti per sospettare ed eventualmente accertare il carattere di malignità di un nodulo tiroideo. Innanzitutto si valutano i livelli di T SH, ormone
ipofisario che stimola la tiroide a secernere gli ormoni T 3 e T 4. Un valore di T SH nella norma è indice di equilibrio endocrino tiroideo, per cui l’indagine clinica può arrestarsi. In caso
di T SH alterato vengono misurati i livelli di Tiroxina libera, eventualmente associati agli
anticorpi antitireoglobulina ed antitireoperossidasi (AbT g e AbT P O). In caso di T SH basso
ed alti livelli di F T 4 (T 4 libero) il nodulo è verosimilmente iperfunzionante (caldo), per cui
il carattere di malignità è assai poco probabile. In caso di T SH normale od alto si rendono
in genere necessari ulteriori accertamenti diagnostici di tipo strumentale. L’indagine strumentale di primo livello consiste nell’ecografia della tiroide, che permette di valutare numero,
sede, dimensioni e caratteristiche dei noduli. Il rischio di malignità, in tal caso, aumenta in
presenza di un nodulo isolato ed ipoecogeno (ecograficamente solido), di microcalcificazioni
intranudolari e in presenza di margini sfumati od irregolari. Altri esami strumentali che valutano il nodulo dal punto di vista metabolico sono: la scintigrafia (valuta l’attività endocrina)
e l’ecografia Doppler (valuta il grado di vascolarizzazione del nodulo). Il rischio di malignità
aumenta in caso di nodulo freddo (ipo-secernente) e con un’ipervascolarizzazione, sia peri che
intranodulare. La corretta interpretazione dei fattori di rischio e dei criteri ecografici e scintigrafici può fornire solo un’indicazione di presunzione sulla natura benigna o maligna di un
nodulo. L’agoaspirato della tiroide con esame citologico è il metodo di indagine preoperatorio più efficace per la diagnosi differenziale tra noduli maligni e benigni. Viene generalmente
prescritto solo in presenza di un sospetto di malignità (in quanto esame invasivo) ed è in
grado di fornire reali elementi diagnostici, nonostante dipendano dall’operatore (patologo) e
in alcuni casi diano esito incerto.
La terapia ed il trattamento dei noduli tiroidei dipende dalla loro natura:
• In caso di noduli tiroidei benigni iperfunzionanti (associati ad ipertiroidismo), sono
disponibili le seguenti modalità di intervento: terapia con Iodio radioattivo 131, asportazione chirurgica di un’area più o meno estesa della ghiandola, farmaci per la cura
dell’ipertiroidismo (ad esempio il metimazolo).
38
Figura 3.3: Immagine ecografica basale in B-mode di un nodulo tiroideo.
• In caso di noduli tiroidei benigni normofunzionanti, il medico può optare per: monitoraggio costante di dimensioni, caratteristiche del nodulo e degli indici ematici di
funzionalità endocrina della ghiandola; eventuale associazione di una terapia farmacologica T SH soppressiva con levotiroxina, in modo da mantenere il T SH ai minimi
livelli. Il presupposto teorico di questo trattamento, che si traduce in un beneficio clinico ancora dibattuto, è la riduzione dell’effetto stimolatorio del T SH sulla crescita
dei noduli tiroidei. In alternativa il medico può optare per l’asportazione chirurgica
di un’area più o meno estesa della ghiandola; tale strategia è indicata quando i noduli
causano disturbi e sintomi da compressione (difficoltà a deglutire e/o a respirare).
• In caso di noduli tiroidei maligni, generalmente il trattamento prevede l’asportazione
chirurgica delle tiroide, associata eventualmente all’escissione dei linfonodi locali. In
rari casi il medico può optare per l’uso di farmaci antitumorali, in caso di carcinoma
diffuso (metastatico) non operabile né trattabile con iodio radioattivo.
L’effetto collaterale più immediato degli interventi di asportazione totale o parziale della tiroide (tiroidectomia) è l’ipotiroidismo, comunque facilmente curabile tramite terapia ormonale
sostitutiva con L-tiroxina.
3.3
Studi di perfusione e ricostruzione 3D della vascolarizzazione di una lesione
Con il termine perfusione si intende non solo quanto sangue arriva in un determinato distretto, ma anche come ci arriva, sottolineando quindi la componente dinamica del processo di
vascolarizzazione di un tessuto. E’ dunque uno studio che combina il dettaglio anatomico
con il dettaglio dinamico. Per enfatizzare il dettaglio dinamico, la tecnica di elezione per gli
studi di perfusione è l’ultrasuono (un’altra tecnica utilizzata, che però è maggiormente focalizzata sul dettaglio anatomico, è la Risonanza Magnetica). Un problema dell’ultrasuono è
che, per sua natura, consente solo l’acquisizione di immagini in due dimensioni. Dunque, per
ottenere una scansione volumetrica, si dovranno acquisire tante immagini contigue, e servirà
poi un algoritmo per la ricostruzione in tre dimensioni. Un altro problema dell’ultrasuono è
la sua impossibilità di identificare il sangue (i globuli rossi sono troppo piccoli per generare
39
riflessione). Dunque si deve utilizzare o un mezzo di contrasto, o una tecnica flussimetrica.
Parlando di lesioni tiroidee, generalmente si acquisiscono sia immagini basali in B-mode per
localizzare il nodulo, sia immagini Doppler e CEU S in tre dimensioni per valutare il grado
di vascolarizzazione e di captazione del nodulo.
I noduli tiroidei sono classificati da TIR 1 a TIR 5 in funzione del loro grado di malignità.
Ad oggi, i noduli TIR 1 e 2 vengono semplicemente monitorati, mentre per i noduli TIR
3, 4 e 5 il paziente viene generalmente sottoposto a tiroidectomia totale. I noduli TIR 4
e TIR 5 vengono quasi sempre riconosciuti come maligni; i noduli TIR 3 risultano invece
particolarmente critici da diagnosticare in fase differenziale. Anche se, per precauzione, l’intera ghiandola viene in genere asportata, solo una piccola percentuale di tali noduli (circa
il 20%) ha un carattere davvero neoplastico. Questo, ad oggi, può essere accertato solo in
fase post-operatoria e solo dopo l’aver asportato la tiroide (o un pezzo di essa) del paziente.
Dunque è importante poter disporre di strumenti per capire a priori e in tempi più brevi il
grado di malignità di un nodulo (analisi di secondo livello), per poi optare per il corretto
trattamento senza sottoporre il paziente ad interventi chirurgici inutili. In generale, un nodulo può essere considerato benigno se presenta una vascolarizzazione ordinata, un diametro
dei vasi normale (100 micrometri) ed una scarsa circolazione che in prevalenza di concentra
alla periferia del nodulo. Un nodulo neoplastico (maligno) invece presenta solitamente una
circolazione intranodulare ed anarchica, con vasi di piccolo diametro (anche 10 micrometri)
e flussi ematici lenti.
Al fine di visualizzare in 3 dimensioni l’architettura vascolare della lesione, il progetto di
questa tesi è di effettuare sulle immagini acquisite dei processi di segmentazione, skeletonizzazione (riduzione dell’informazione) ed estrazione di centerlines (luogo dei punti a cui
appartiene l’asse del vaso), fino ad arrivare ad una rappresentazione utile e comprensibile dei
vasi sanguigni della lesione. Con il termine segmentazione si intende il distinguere, su un’immagine, oggetti o regioni di interesse (ROIs) da altre regioni che non presentano un interesse
diagnostico. Nel caso più semplice la segmentazione si riduce alla divisione di un’immagine
in due classi (le regioni di interesse e lo sfondo), producendo in uscita una maschera binaria. Il processo di skeletonizzazione prevede invece (spesso partendo dalla maschera binaria
ottenuta con la segmentazione) di eliminare numerosi pixel dall’immagine fino ad ottenere
la rappresentazione minimale di un oggetto. Esistono numerosi tipi di algoritmi per perseguire tale obiettivo e i principali verranno descritti in seguito. Il processo di estrazione di
centerlines può essere interpretato come un particolare tipo di skeleton, ma risulta particolarmente adatto ad oggetti di forma tubolare (come i vasi sanguigni). Spesso si avvale di
formalismi matematici molto rigorosi e in genere più complessi. Dopo aver effettuato tali
processi possono ancora essere valutati alcuni parametri quantitavi, ad esempio la tortuosità
dei vasi sanguigni della lesione stessa. Esiste più di un parametro per descrivere la tortuosità
di un vaso, e in generale ci si aspetta che tali parametri assumano valori maggiori per una
lesione neoplastica. Possono costituire un’eccezione alcuni noduli tumorali maligni a stadio
molto avanzato (TIR 5), caratterizzati da pochi vasi e da una maggioranza di tessuto ormai
necrotico.
Nei seguenti capitoli verranno presentati i processi utilizzati in questo lavoro per perseguire
gli obiettivi esposti, cercando di creare un iter di elaborazioni sequenziali che possano fornire
al personale medico un valido strumento diagnostico.
40
Capitolo 4
Filtro per il miglioramento della
visualizzazione della componente
vascolare su immagini in due e in
tre dimensioni
4.1
Introduzione
Come già descritto ampiamente nei precedenti capitoli, un’accurata visualizzazione e quantificazione dell’architettura vascolare umana è un importante prerequisito per molte procedure
cliniche. Lo scopo di questo filtro, indicato d’ora in avanti con il nome di Filtro di Vesselness,
è quello di enfatizzare e migliorare la visualizzazione di strutture vascolari, con l’eventuale
obiettivo di una successiva procedura di segmentazione. Infatti il filtraggio Vesselness può
essere inteso come un pre-processing utile ad eliminare componenti non vascolari da un’immagine; inoltre la successiva segmentazione degli alberi vascolari potrà essere utilizzata come
punto di partenza per procedure di skeleton o di features extraction.
L’obiettivo è dunque estrarre le informazioni morfologiche vascolari su immagini in due o
in tre dimensioni. Ci sono numerosi approcci in tal senso. Alcuni di essi lavorano con una
scala spaziale fissa e utilizzano combinazioni (non lineari) di operatori a differenze finite [1];
altri utilizzano invece un metodo che applica un filtro mediano nella direzione del vaso [2].
Entrambi questi metodi hanno mostrato problemi nell’identificare i vasi di dimensioni molto
grandi. Inoltre, per gestire l’anisotropia dei voxel nelle immagini 3D, questi metodi necessitano di ricampionare il dataset iniziale. L’approccio multiscala invece (seguito in questo lavoro
e già presentato in letteratura da Frangi [3]) permette di superare questi limiti. Tale metodo,
basato sull’informazione del secondo ordine (Hessiano) dell’immagine, lavora con differenti parametri spaziali (scale) e, mediante meccanismi di integrazione, costruisce l’immagine
finale cercando di adattarli alle dimensioni dei vasi presenti sull’immagine. Tuttavia i meccanismi di integrazione utilizzati per produrre l’immagine finale non sempre forniscono risultati
ottimali. In primo luogo, l’immagine è costruita basandosi sui valori dei parametri spaziali
che forniscono la massima risposta in intensità; questo può risultare un problema nel caso di
immagini rumorose, dove il rumore può apportare un contributo significativo sull’immagine
filtrata. Inoltre tale metodo, seppur valido, è comunque dipendente dal range di parametri
spaziali utilizzato (occorre impostarne gli estremi in funzione delle scale minima e massima
alle quali ci si aspetta di trovare strutture vascolari rilevanti). Infine, l’intensità dell’immagine finale è costruita, pixel per pixel (o voxel per voxel, nel caso di immagini volumetriche),
attraverso una formula matematica con due soglie che devono essere impostate dall’utente.
41
4.2
Metodo
In questa sezione viene descritto il funzionamento del filtro di Vesselness implementato nell’ambito della presente tesi. Si mantiene l’idea di lavorare con l’informazione del secondo
ordine dell’immagine, ma si cerca di rendere più semplice la definizione di intensità dell’immagine finale (eliminando la formula di Frangi). Inoltre si ricerca un metodo alternativo per
la scelta automatica dei parametri spaziali. Il filtro proposto può lavorare in due e in tre
dimensioni, ma per semplicità di esposizione verrà descritto in termini bidimensionali (non
risulta comunque difficile estrapolarne il comportamento in 3D dalla trattazione che segue).
Il filtro di Vesselness ha, come descritto nella sezione precedente, lo scopo di migliorare la
visualizzazione di strutture vascolari, riconosciute dall’algoritmo come strutture tubolari. Il
punto chiave è poter lavorare con diverse scale spaziali, dal momento che i vasi possono
apparire più piccoli o più grandi a seconda della tecnica di imaging utilizzata e in base all’immagine stessa. Il filtro analizza la matrice Hessiana ottenuta convolvendo le derivate seconde
direzionali di un kernel gaussiano (G) con l’immagine da elaborare (I). Il filtro gaussiano
assume la seguente forma:
1 −
G(x, y) =
e
2πσ
2
x2
+ y2
2σ 2
2σ
(4.1)
dove x e y sono le dimensioni spaziali (dipendenti dalla scala utilizzata) e σ è la deviazione standard (anch’essa variabile). Le 4 componenti (nel caso 2D) della matrice Hessiana
dell’immagine sono dunque ottenute con le seguenti espressioni:
Hxx = I ∗
δ2G
δx2
Hxy = Hyx = I ∗
Hyy = I ∗
δ2G
δxδy
δ2G
δy 2
(4.2)
(4.3)
(4.4)
e, in forma matriciale, l’Hessiano può essere scritto come:
Hxx Hxy
H=
Hyx Hyy
(4.5)
Della matrice Hessiana vengono calcolati (pixel per pixel) gli autovalori λ1 e λ2 , ordinati
in modo che:
|λ1 | ≥ |λ2 |
(4.6)
Dal momento che il punto critico di molti filtri è la scelta dei parametri spaziali con cui
lavorare per produrre la migliore immagine possibile, il filtraggio è ripetuto per 8 scale e per
16 deviazioni standard (σ) del Gaussiano.
A questo punto, l’algoritmo deve scegliere autonomamente i due parametri (scala e deviazione standard) che corrispondono (nel modo più accurato possibile) alle dimensioni dei vasi
sull’immagine. Si è ideato dunque un Winning Factor (fattore di vincita) costruito come
segue:
WF =
R,C
X
i,j=1
con
42
Ai,j
(4.7)
Figura 4.1: Immagine di esempio (Angiografia a raggi x).
λ2
Ai,j = p 2 1 2
λ1 + λ2
(4.8)
Per comprendere meglio il funzionamento del filtro, assumiamo di aver processato, per
una determinata scala e deviazione standard, l’immagine I. Per ogni pixel di I viene calcolato
il parametro Ai,j , che indica il rapporto tra l’autovalore a modulo maggiore e la somma dei
quadrati di tutti gli autovalori dell’immagine (per quel pixel) sotto radice. In altre parole,
il parametro Ai,j indica la potenza del segnale rispetto al rumore, ossia l’intensità dei vasi
rispetto ad altre strutture e allo sfondo. Se l’immagine digitale è costituita da R righe e C
colonne, si ottengono R ∗ C valori di Ai,j , che vengono poi sommati per ottenere un unico
Winning Factor per la scala e la deviazione standard testate. Dal momento che l’algoritmo
lavora con 8 valori di scala e 16 di deviazione standard, si otterranno alla fine 8 ∗ 16 = 128
fattori di vincita, ognuno associato ad un’immagine filtrata. Quindi al termine della prima
parte dell’algoritmo vengono fornite 128 immagini filtrate e altrettanti Winning Factor (raggruppati in una matrice) ad esse associati, ognuno calcolato per una certa scala spaziale e
per una certa deviazione standard. Alla posizione (i, j) della matrice di trova il fattore di
vincita associato all’immagine ottenuta con scala=i e deviazione standard=j.
Nella seconda parte dell’algoritmo, si inizia calcolando la derivata prima (per righe) della
matrice dei fattori di vincita. Tale operazione valuta la loro dispersione per le diverse scale
testate (per ogni deviazione standard). Viene quindi scelta come scala vincente quella con
l’andamento più simile ad una funzione gaussiana nell’intervallo di parametri scelto. In
altri termini, è la scala che fornisce mediamente le immagini migliori per tutte le deviazioni
standard (un esempio è riportato in Figura 4.4).
Una volta scelta la scala, l’algoritmo valuta la risposta dell’immagine per le sue 16
deviazioni standard, e mantiene quella la cui risposta è massima (Figura 4.5).
Infine, l’immagine finale è costruita assegnando ad ogni pixel il suo valore di λ1 , ossia
l’autovalore massimo della matrice Hessiana ottenuta con la scala e la deviazione standard
vincenti.
Il filtro di Vesselness descritto in questo capitolo presenta i vantaggi dell’automatismo nella
43
Figura 4.2: Esempi di immagini filtrate per diverse scale spaziali, tenuta fissa la deviazione
standard del filtro gaussiano (la scala aumenta da sinistra a destra e dall’alto verso il basso).
Figura 4.3: Esempi di immagini filtrate per diverse deviazioni standard del filtro gaussiano,
una volta scelta la scala spaziale vincente (la deviazione standard aumenta da sinistra a destra
e dall’alto verso il basso).
44
Figura 4.4: Esempio di scelta della scala vincente.
Figura 4.5: Esempio di scelta della deviazione standard del Gaussiano, una volta trovata la
scala che fornisce mediamente i risultati migliori.
45
scelta dei parametri spaziali e di un buon grado di precisione dovuto alle numerose scale e
deviazioni standard testate. Per contro, tale precisione richiede un costo computazionale non
bassissimo: i tempi di processing sono comunque dell’ordine di alcuni minuti, ma possono essere ridotti restringendo il campo di ricerca (cioé utilizzando meno valori di scala e deviazione
standard). Presenta inoltre un buon grado di versatilità in quanto è applicabile ad immagini
ottenute con diverse tecniche di imaging.
4.3
Segmentazione
L’applicazione del filtro di Vesselness risulta molto utile come pre-processing per successive
elaborazioni come segmentazione, skeletonizzazione o estrazione di centerlines. Nell’esempio
in Figura 4.6 si nota come (e ciò vale per la maggioranza delle immagini prodotte dal filtro) l’immagine filtrata abbia associato un istogramma dei livelli di grigio di aspetto circa
bimodale.
Figura 4.6: Esempio di segmentazione che segue il filtraggio Vesselness. L’immagine originale
(i) viene filtrata e produce l’immagine (ii). Di quest’ultima è calcolato l’istogramma dei livelli
di grigio (iii), che mostra un aspetto bimodale; l’immagine (iv) mostra lo stesso istogramma
con un ingrandimento sulla valle che ne separa le due distribuzioni. Scegliendo opportunamente la soglia di segmentazione, si ottiene una buona maschera binaria dell’immagine di
partenza (v).
Tale istogramma, ricavabile da ogni tipo di immagine, rappresenta ogni possibile valore di
intensità assunto dai pixel (asse orizzontale) ed associa ad ognuno di questi valori una barra
verticale. L’altezza di ogni barra rappresenta il numero di pixel caratterizzati da un certo
valore di luminosità (indicato sull’asse orizzontale in corrispondenza della barra).
La segmentazione di immagini che presentano un istogramma bimodale può essere ottenuta
in modo semplice ed immediato mediante la tecnica del Global Thresholding. Ogni pixel è
confrontato con una soglia: se il suo valore di intensità è maggiore della soglia il pixel viene
considerato come parte di un oggetto rilevante sull’immagine ed è colorato di bianco. Al
contrario, se minore o uguale, viene considerato non rilevante o appartenente allo sfondo e
colorato di nero. In un istogramma bimodale sono distinguibili due distribuzioni separate, che
rappresentano le due possibili classi di appartenenza del pixel (oggetto o sfondo). Prendendo
una soglia nella valle che separa le due distribuzioni, si minimizzano gli errori di segmentazione
e si genera facilmente una maschera binaria contenente solo l’oggetto di interesse.
46
4.4
Conclusioni e applicazioni in flussimetria
Il filtro di Vesselness automatico nasce per il riconoscimento di vasi sanguigni (intesi come
strutture approssimativamente tubolari) all’interno di un’immagine. Nella sua forma originale, è basato su una matematica che cerca di identificare la morfologia delle strutture vascolari
con il fine di sopprimere sfondo e rumore (tutto ciò che non è un vaso sanguigno). Lavora
per diverse scale e diverse deviazioni standard di un kernel Gaussiano utilizzato per calcolare,
mediante convoluzione nel dominio spaziale, l’Hessiano dell’immagine. L’immagine finale è
ottenuta dagli autovalori della matrice Hessiana massimi in intensità, pixel per pixel.
In immagini morfologiche come angiografie, DSA e MRA è necessario lavorare a diverse
scale spaziali in quanto i vasi sanguigni possono apparire più piccoli o più grandi a seconda
della tecnica di imaging utilizzata per l’acquisizione dell’immagine stessa. L’automazione del
filtro consente di riconoscere la scala più adatta alle dimensioni della rete vascolare sull’immagine in questione, di calcolare la massima risposta delle immagini filtrate per le diverse
scale e deviazioni standard, e quindi di ottenere l’immagine vincente.
I risultati forniscono immagini ben definite dei vasi sanguigni, preservando le intensità del
flusso ematico e sopprimendo lo sfondo. In alcuni casi (soprattutto angiografie e DSA, in cui
sono comuni gli artefatti da movimento del paziente) resta una piccola parte di rumore sullo
sfondo. Ciò non crea particolari problemi, in quanto si tratta sempre di strutture di piccole
dimensioni e di bassa intensità, facilmente eliminabili con un thresholding, con un’operazione
di filtraggio o con operatori morfologici. Tale rumore che rimane anche dopo il filtraggio è
principalmente dovuto al fatto che l’immagine contiene, come ogni risultato di un processo di
digitalizzazione, un’informazione quantizzata. Dunque la scala spaziale scelta dall’algoritmo
come quella che meglio identifica le dimensioni dei vasi sull’immagine in questione non è una
scala che può assumere infiniti valori, ma valori discreti a passi di 1. Questo può portare al
rumore sopracitato che, comunque, è facilmente sopprimibile.
Per quanto riguarda l’applicazione di tale filtro a volumi ottenuti mediante tecniche flussimetriche (ad esempio il Power Doppler), nasce il problema della poca informazione morfologica
data dalle tecniche stesse, maggiormente volte all’aspetto funzionale dei tessuti. Dunque
un’applicazione del filtro come descritta nei paragrafi precenti può falsare l’informazione e
riconoscere delle strutture che non sono effettivamente vasi sanguigni (oltre ad avere pesanti
costi computazionali). Però, vi è comunque un utilizzo pratico e veloce che il filtro di Vesselness può fornire ai volumi flussimetrici.
Nell’ottica di questo progetto di tesi, ciò che interessa è avere un volume filtrato che sia
adatto ad essere elaborato da successivi algoritmi di estrazione di centerlines, capaci di skeletonizzare ed evidenziare la struttura vascolare della lesione al fine di classificarla in funzione
della sua severità. Dunque, applicando il filtro per una sola scala spaziale (la più piccola) e
diverse deviazioni standard, si ottiene comunque un beneficio. Oltre a delineare le zone di
maggior flusso, i valori di intensità dei pixel vengono aggiustati in funzione dei valori dei pixel
adiacenti, riducendo gli errori dovuti al trascinamento tipico delle acquisizioni Eco-Doppler.
Il risultato del Vesselness, sebbene non fornisca un’informazione prettamente visiva dei vasi sanguigni (cosa a cui penseranno gli algoritmi presentati nei capitoli seguenti), produce
comunque un volume più affidabile di quello originale. In più, l’operazione di filtraggio riduce molto i tempi computazionali delle successive operazioni svolte sul volume. Inoltre, dal
momento che l’algoritmo di estrazione di centerlines descritto nel prossimo capitolo è basato
sul flusso ematico, un filtraggio iniziale permette di fornire delle centerlines più ordinate e
meno discontinue, in un tempo minore di quello che ci avrebbe messo l’algoritmo senza il
pre-processing con il filtro di Vesselness.
47
4.5
Risultati
Si mostrano alcuni dei risultati ottenuti con il filtro. Per tutte le immagini binarie è stata
usata la stessa soglia di segmentazione (ciò indica una buona capacità del filtro di Vesselness
a fornire immagini uniformi ed una grande semplicità nel successivo processo di Global Thresholding).
Figura 4.7: Esempio 1: immagine DSA originale (sinistra) e filtrata (destra).
Figura 4.8: Maschera binaria ottenuta dal processo di segmentazione dell’immagine filtrata
all’esempio 1.
48
Figura 4.9: Esempio 2: immagine fundus retinico originale (sinistra) e filtrata (destra).
Figura 4.10: Maschera binaria ottenuta dal processo di segmentazione dell’immagine filtrata
all’esempio 2.
49
Figura 4.11: Esempio 3: immagine MRA (Poligono di Willis) originale (sinistra) e filtrata
(destra).
Figura 4.12: Maschera binaria ottenuta dal processo di segmentazione dell’immagine filtrata
all’esempio 3.
50
Figura 4.13: Esempio 4: immagine DSA originale (sinistra) e filtrata (destra).
Figura 4.14: Maschera binaria ottenuta dal processo di segmentazione dell’immagine filtrata
all’esempio 4.
51
Figura 4.15: Esempio 5: applicazione del filtro in 3 dimensioni su immagini volumetriche
di Risonanza Magnetica con mezzo di contrasto. Nell’immagine si osserva la circolazione
polmonare (l’intero processo seguito per giungere a questo risultato, che ha richiesto la segmentazione del muscolo cardiaco e la sua successiva eliminazione, verrà descritto nel prossimo
capitolo).
Figura 4.16: Ingrandimento di un’arteria dell’esempio 5.
52
Figura 4.17: Esempio 6: rendering 3D di un Power Doppler originale (sinistra). L’immagine
mostra un nodulo tiroideo classificato TIR 2. A destra, lo stesso rendering filtrato. Si nota
come l’informazione di flusso ematico sia molto più continua e visibile per il volume a destra.
Anche la forma stessa del nodulo (non visibile chiaramente nel file originale) appare più
chiara dopo il filtraggio.
Figura 4.18: Esempio 7: rendering 3D di un Power Doppler originale (sinistra). L’immagine
mostra un nodulo tiroideo classificato TIR 3. A destra, lo stesso rendering filtrato.
Figura 4.19: Esempio 8: rendering 3D di un Power Doppler originale (sinistra). L’immagine
mostra un nodulo tiroideo classificato TIR 3. A destra, lo stesso rendering filtrato.
53
Figura 4.20: Esempio 8: rendering 3D di un Power Doppler originale (sinistra). L’immagine
mostra un nodulo tiroideo classificato TIR 3. A destra, lo stesso rendering filtrato.
Figura 4.21: Esempio 9: rendering 3D di un Power Doppler originale (sinistra). L’immagine
mostra un nodulo tiroideo classificato TIR 5. A destra, lo stesso rendering filtrato.
54
Capitolo 5
Algoritmo per la localizzazione
delle centerlines di strutture
vascolari in due e in tre dimensioni
5.1
Introduzione
La quantificazione delle caratteristiche di un vaso sanguigno (lunghezza, tortuosità, larghezza, ramificazioni) può fornire nuovi strumenti per la diagnosi di patologie che presentano una
modificazione (alla micro o alla macroscala) morfologica dei vasi. Quando la rete vascolare
assume un aspetto complesso (come nel caso di molti tumori) risulta estremamente arduo
(se non impossibile) compiere tali misure manualmente. In alcuni casi è addirittura impossibile distinguere chiaramente la rete vascolare stessa, che è cosı̀ intricata da creare strutture
sovrapposte l’una all’altra sull’immagine. La soluzione a questo problema è utilizzare un’analisi automatica, ormai largamente accettata dalla comunità medica che ne ha riconosciuto
i benefici. Il primo passo (propedeutico all’analisi) è quello di minimizzare l’informazione
contenuta sull’immagine in modo da ottenere una rappresentazione sintetica del network vascolare. In questo capitolo verrà descritto, a tal scopo, un nuovo algoritmo per l’estrazione
della centerline di un vaso flessibile, veloce e capace di trattare sia immagini bidimensionali
che volumetriche. Nel prossimo capitolo invece verrà descritto un algoritmo di skeleton (utilizzato per raggiungere i medesimi obiettivi).
In letteratura esistono già numerosi approcci per l’individuazione delle centerlines di oggetti
tubolari. Alcuni di questi metodi richiedono la creazione di una maschera binaria attraverso
preliminari procedure di segmentazione dell’immagine.
Un primo approccio consiste nel definire la centerline come il luogo dei centri delle massime circonferenze (o sfere) inscrivibili all’interno del vaso, lungo il suo intero percorso [4].
La centerline è definita come il minor percorso (all’interno del vaso) tracciato tra due punti
estremi. Per assicurarsi che la linea finale sia centrale al vaso, il suo percorso deve essere
vincolato a decorrere sul diagramma di Voronoi del modello matematico del vaso. Un diagramma di Voronoi è, in prima approssimazione, appunto il luogo dei centri delle massime
circonferenze (o sfere, in 3D) inscrivibili all’interno del vaso. Le centerlines sono determinate
come il percorso definito dal diagramma di Voronoi che minimizza l’integrale del raggio delle
massime sfere inscritte nel vaso (ciò equivale a trovare il percorso più breve in un sistema di
coordinate sferiche). Questo metodo presenta un’alta precisione ma è vincolato dalla bontà
del modello matematico del vaso da cui si estrae il diagramma di Voronoi. Inotre, in molte
sue applicazioni, è richiesto all’utente di svolgere non poche operazioni preliminari, come la
segmentazione manuale e il posizionamento dei punti di partenza (agli estremi del vaso) della
centerline.
Un secondo tipo di approccio si basa semplicemente sul fatto che, sotto l’ipotesi di moto
55
laminare, il flusso ematico è maggiore al centro del vaso (e dunque viene codificato con una
maggiore luminosità sull’immagine) [5]. I pixel di intensità massima costituiscono dunque la
centerline. Questo metodo soffre molto del rumore presente sull’immagine, che può falsare
l’informazione del flusso. Inoltre poco si presta all’analisi di distretti tumorali, dove l’ipotesi
di flusso laminare diventa sempre meno consistente quanto più la lesione è severa.
Un terzo tipo di metodo utilizza invece i level set [6]. In generale i level set sono un tipo
di contorno attivo (o modello deformabile) che trova la sua massima utilità nelle procedure
di segmentazione. Possono essere usati per individuare cambiamenti di concavità sul bordo
di un oggetto, oppure per segmentarlo. Nella loro implementazione più semplice assumono
la forma di un contorno chiuso, regolato da un’espressione matematica, che si muove iterativamente verso la struttura di interesse. Tale espressione racchiude in genere vari contributi
energetici: alcuni di essi guidano il contorno a richiudersi verso l’oggetto di interesse, altri
bloccano il restringimento del contorno non appena l’oggetto è stato raggiunto. Alla fine
delle iterazioni ciò che è racchiuso all’interno del contorno attivo è solo l’oggetto di interesse.
Nell’ambito dell’individuazione di centerlines, il level set assume la forma di una superficie
mobile (in 3D). Si inizializza un punto di partenza (seed point) sul vaso e si comincia l’evoluzione della superficie. Dopo un certo numero di iterazioni la superficie attiva va a posizionarsi
al centro del vaso, seguendo criteri matematici basati sui valori di intensità del flusso e criteri
geometrici che tengono conto della morfologia della struttura vascolare.
Un quarto metodo (simile al primo descritto) è costruito su un modello di sfere mobili [7].
Si basa sul fatto che i vasi sanguigni possono essere considerati strutture tubolari elastiche
ed espandibili (soprattutto le vene). Inoltre le sezioni perpendicolari alla direzione del flusso
sanguigno assumono una forma circolare. Dunque ogni vaso può essere considerato come un
insieme di sfere di diverse dimensioni che decorrono dalle radici del sistema vascolare verso la
direzione del flusso ematico. Il raggio delle sfere diminuisce gradualmente andando verso la
periferia del network vascolare, e nei luoghi di biforcazione ogni sfera si divide in due. Questa
procedura di sfere mobili termina quando il raggio di una delle sfere diventa nullo. L’area
di tutte le sfere costituisce l’intero vaso sanguigno e l’insieme delle connessioni tra due punti
centrali adiacenti danno luogo alla centerline. Tale metodo (cosı̀ come il primo descritto in
questo paragrafo) richiede una buona segmentazione ed un alto contenuto morfologico dell’immagine iniziale (risulta cioé difficilmente applicabile a immagini funzionali).
Altri metodi di più semplice implementazione si basano invece su criteri geometrici, come
il calcolo della Distance Transform del vaso [8] o l’identificazione dei suoi contorni (Edge
Detection) [9].
La Distance Transform è, in prima approssimazione, un’operazione che associa ad ogni pixel
di un oggetto il suo valore di distanza dallo sfondo. Effettuando dunque successive erosioni
per i pixel che assumono valori di Distance Transform minori di una certa soglia si possono
identificare i pixel centrali dell’oggetto. Tale metodo è anche alla base di molti algoritmi di
skeleton geometrici (trattati nel prossimo capitolo).
L’Edge Detection invece consiste nell’identificare e segmentare i contorni di un oggetto. Trovati i contorni del vaso, la centerline è definita come l’unione di tutti i pixel posti a metà
tra i due bordi identificati. Tale procedura è strettamente dipendente dal metodo scelto per
l’identificazione dei contorni del vaso. Generalmente si utilizzano dei gradienti di Sobel (o
di Canny) che valutano il valore di derivata dell’immagine (che dovrebbe essere più alto nei
punti di grande discontinuità, ossia nei punti che separano un oggetto dallo sfondo). Il problema sta nel settaggio corretto dei parametri (ad esempio le dimensioni) di tali gradienti e
nell’alta sensibilità al rumore.
Altri metodi ancora per identificare i pixel della centerline si basano su algoritmi di classificazione (Logica Fuzzy, Reti Neurali) che presentano però scarsa versatilità e pesanti costi
computazionali [10].
Un ultimo metodo che vale la pena citare, la cui idea di base viene utilizzata nell’ambito
di questa tesi, consiste nel definire la centerline come l’insieme dei punti che sono massimi
56
globali di una funzione matematica in N dimensioni che approssima il vaso sanguigno (ridge
points) [11]. Tale metodo presenta l’inconveniente di ogni modellizzazione matematica di
un oggetto reale: essendo il modello un’approssimazione dell’oggetto, i ridge points trovati
non sempre appartengono davvero alla centerline, che assume dunque un aspetto discontinuo
(soprattutto nei punti di ramificazione) e non sempre centrale al vaso. Il software progettato
in questo lavoro di tesi, descritto nel seguente paragrafo, mantiene l’idea della modellizzazione matematica del vaso sanguigno, ma cerca di superare tale inconveniente attraverso nuovi
algoritmi di ricerca.
5.2
Metodo
Per garantire una maggior robustezza al metodo basato sulla selezione dei ridge points, l’approccio presentato in questo paragrafo combina la loro identificazione (ridges detection) con
una severa ricerca della centerline che parte proprio da tali punti. Il vantaggio è che è possibile imporre regole molto restrittive per la determinazione dei ridge points (rendendo cosı̀ certa
la loro appartenenza all’asse centrale del vaso) utilizzando poi altri criteri per assicurarsi che
la centerline estratta sia priva di salti o discontinuità. Inoltre, preprocessando le immagini
con il filtro di Vesselness, l’appartenenza della centerline al vaso di interesse risulta più facile
da garantire. In questa sezione verrà presentato il metodo in due dimensioni; ma, cosı̀ come il
filtro di Vesselness, questo algoritmo è capace di funzionare anche su immagini volumetriche
(la sua implementazione in 3D è semplice da estrapolare dalla trattazione che segue).
Comunemente a tutti i metodi descritti nel paragrafo precedente, l’obiettivo del presente
software è quello di estrarre le centerlines da una rete vascolare. In questo modo è possibile
garantire una migliore visualizzazione (anche in 3D) dei vasi sanguigni ed effettuare successivamente il calcolo di vari parametri quantitativi utili nel processo di diagnosi. Come già detto,
il presente algoritmo combina l’approccio del ridges detection con una successiva ricerca delle
centerlines. Un ridge viene definito come un set di curve i cui punti sono massimi locali di
una funzione a N variabili in almeno (N-1) dimensioni. Dunque, nel caso di immagini 2D,
è un set di curve i cui punti sono massimi locali di una funzione a due variabili in almeno
una dimensione. Al fine di snellire l’algoritmo e i suoi tempi di elaborazione, tale definizione
non viene testata per ogni pixel dell’immagine, ma si definisce invece un sottoinsieme di pixel
candidati. Se tali pixel la soddisfano allora faranno certamente parte della centerline; in caso
contrario verranno scartati. Per definire il sottoinsieme dei punti candidati vengono effettuate
due operazioni preliminari in modo sequenziale: l’impostazione dei seed points (o seeds) e la
ricerca dei massimi locali (detti anche massimi 1D).
I seed points definiscono un sottoinsieme dei pixel dell’immagine che appartengono al vaso
di interesse (al suo interno o sui suoi bordi). Per definirli occorre impostare un percentile
sui valori di intensità dei toni di grigio sull’immagine. Lavorare su immagini preventivamente filtrate con il filtro di Vesselness rende molto più semplice questa operazione (l’unica a
dover essere compiuta dall’utente). I seeds sono dunque tutti i pixel dell’immagine che appartengono ad una classe di percentili maggiore o uguale al percentile definito dall’utente.
In alternativa, sempre nell’ottica di ridurre il costo computazionale, può essere impostato un
intervallo di valori che contiene i seeds (con l’elemento centrale pari al percentile scelto) più
ridotto. Un esempio è mostrato in Figura 5.1.
I risultati non variano in modo sensibile tra le due opzioni: l’unico vincolo di questa
operazione è l’appartenenza dei seeds al vaso di interesse o ai suoi contorni.
Una volta impostati i seeds, la successiva operazione compiuta dall’algoritmo è la ricerca
locale dei pixel di massima intensità (si ricorda che il flusso ematico è generalmente più alto
al centro del vaso, che dunque appare più luminoso sull’immagine). Tale ricerca è svolta in
una dimensione. Per ogni seed si valuta il suo intorno 8-connesso e si trova al suo interno il
pixel con intensità maggiore. La ricerca del massimo 1D viene effettuata linearmente sulla
57
Figura 5.1: Esempio di scelta del percentile. I seed points sono indicati in blu sulle immagini
di esempio.
retta passante per il seed point considerato e il punto a maggiore intensità del suo intorno
(Figura 5.2).
Figura 5.2: Esempi del meccanismo di ricerca dei punti di massimo in una dimensione. La
direzione della ricerca viene definita tracciando una retta tra il seed point considerato e il
pixel di maggiore intensità del suo intorno 8-connesso.
Si confronta iterativamente il valore di intensità di ogni pixel appartenente alla retta
con il valore del pixel precedente. Quando tale valore risulta inferiore all’intensità del pixel
precedente, allora il pixel precedente viene definito massimo 1D e la ricerca (per il seed point
considerato) si arresta (Figura 5.3).
In (Figura 5.4) si possono osservare i punti di massimo 1D trovati all’interno di un vaso
di interesse.
La scelta di effettuare la ricerca in modo lineare (che permette dunque di identificare i
pixel di massima intensità all’interno di un vaso) riduce drasticamente i tempi computazionali, in quanto non vengono valutati tutti i pixel del vaso ma solo quelli appartenenti alla
retta tracciata per ogni seed (da cui il nome massimi 1D). Inoltre tale ricerca non dipende
dal numero di seeds scelti e nemmeno dalla loro posizione all’interno del vaso; questo rende
meno critica, per l’utente, la loro selezione.
A questo punto, l’algoritmo valuta ogni massimo trovato e determina se fa parte della centerline del vaso (cioé se è un ridge point) oppure no. Per stabilirlo verifica se ogni punto di
massimo soddisfa i seguenti criteri:
58
Figura 5.3: Esempi di massimi 1D individuati con il meccanismo di ricerca lineare in una
dimensione.
Figura 5.4: Esempi di punti di massimo 1D individuati all’interno di un’immagine (in verde).
1. λ1 ≤ λ2 < 0, dove λ1 e λ2 sono gli autovalori della matrice Hessiana dell’immagine
(ordinati in modo che λ1 ≤ λ2 ).
2. v1 · ∇I = 0 e v2 · ∇I = 0, dove v1 e v2 sono gli autovettori della matrice Hessiana
dell’immagine associati a λ1 e λ2 e ∇I è il gradiente dell’immagine (espresso, in due
δI
δI
x + δy
y).
dimensioni, come ∇I = δx
3.
λ2
λ1
≥ 1 − , dove è tenuto fisso a 0.5.
I primi due criteri rappresentano le definizioni matematiche che il pixel deve rispettare
per poter essere considerato un ridge point. Il terzo criterio è aggiunto per vincolare il punto
ad essere il più centrale possibile al vaso di interesse. Il parametro descrive infatti la deviazione da una struttura circolare perfetta (che è, idealmente, la sezione trasversale del vaso).
Il suo valore numerico è scelto pari a 0.5, ossia permette alla sezione trasversale del vaso di
deviare (da un cerchio perfetto) verso un profilo ellittico fino ad un rapporto tra i due assi
dell’ellisse inferiore a 2:1. In Figura 5.5 sono mostrati dei vasi sanguigni con i loro ridge points.
L’algoritmo a questo punto effettua una ricerca automatica della centerline a partire dai
ridge points definiti precedentemente. Viene considerato ogni ridge point e sono valutate due
59
Figura 5.5: Esempi di ridge points individuati su un’immagine 2D (in rosso). Da questi punti,
centrali al vaso, verrà effettuata la ricerca della centerline.
direzioni di ricerca (positiva e negativa). Il criterio che guida la ricerca è basato sul percorso
dato dai pixel di massima intensità. Per ogni pixel indagato, l’algoritmo di ricerca svolge i
seguenti passi:
1. Definisce il suo intorno 8-connesso;
2. Cerca il pixel di massima intensità dell’intorno; in questo modo comincia la ricerca
positiva (cioé quella la cui direzione è data dal pixel di massima intensità dell’intorno).
Figura 5.6: Intorno 8-connesso del ridge point considerato.
3. In quel punto di massima intensità si crea un altro intorno 8-connesso e si ricerca un altro
pixel di massima intensità, e cosı̀ via. Per rendere più rigorosa la ricerca della centerline,
l’intorno 8-connesso generato iterativamente in ogni punto della ricerca viene aggiustato
in funzione del movimento precedente. L’alto grado di precisione richiesto non consente
alla centerline di deviare dal suo percorso centrale al vaso. Ciò risulta particolarmente
utile in zone di flusso non perfettamente laminare o in zone di biforcazione del letto
vascolare. In Figura 5.7 è mostrato un esempio del meccanismo di ricerca positiva,
mentre in Figura 5.8 è mostrato l’aggiustamento dell’intorno 8 connesso in funzione del
movimento precedente.
4. Terminata la ricerca positiva, si effettua una seconda ricerca (sempre a partire dal ridge
point considerato) in direzione opposta (ricerca negativa), seguendo gli stessi criteri
60
Figura 5.7: Semplice esempio del meccanismo di ricerca positivo.
Figura 5.8: Regole per l’aggiustamento dell’intorno 8-connesso in funzione del movimento
precedentemente compiuto dalla ricerca. Le caselle dell’intorno evidenziate in rosso vengono
vietate, lasciando proseguire la centerline solo in una delle altre tre posizioni rimaste libere.
Questo garantisce alla centerline di non deviare troppo dal suo percorso, facendo fronte alle
disomogeneità del flusso ematico e al contenuto di rumore dell’immagine.
descritti ai punti precedenti. In Figura 5.9 è mostrato un esempio schematico di ricerca
completa di una centerline a partire da un ridge point.
L’algoritmo è dotato di numerosi sistemi di controllo che non permettono alla ricerca
di indagare due volte un percorso già tracciato (ad esempio nel caso di due pixel con lo
stesso valore di intensità nell’intorno 8-connesso). Tali controlli permettono anche di superare
piccole imperfezioni nelle intensità dei pixel del vaso, date dal rumore di fondo (ad esempio
in zone di stenosi vascolare).
La ricerca della centerline per un dato ridge point termina quando almeno uno dei seguenti
criteri è soddisfatto:
• La ricerca incontra un altro ridge point.
• Una ricerca ne interseca un’altra già tracciata.
• La ricerca interseca sé stessa.
61
Figura 5.9: Semplice esempio schematico di ricerca (positiva e negativa) di una centerline a
partire da un ridge point.
• La ricerca raggiunge un punto dello sfondo o esce dai confini spaziali dell’immagine.
Nonostante i numerosi controlli di cui è dotato l’algoritmo, in qualche caso le centerlines
estratte possono mostrare delle discontinuità. Può succedere in regioni particolari del vaso
soggette ad un flusso ad alto grado di turbolenza, oppure in zone di biforcazione in cui uno
dei due rami presenta un diametro molto maggiore dell’altro. In quest’ultimo caso il flusso
ematico tende a distribuirsi prevalentemente nel ramo con diametro maggiore e di conseguenza
la ricerca della centerline può bypassare il punto di ramificazione (branchpoint). Dunque,
al termine di tutte le ricerche, si effettua un postprocessing per unire questi frammenti di
centerlines. Un punto estremo di una centerline (endpoint) viene unito alla centerline più
vicina se il percorso minimo (in pixel) tra l’endpoint e la centerline era stato in precedenza
considerato come parte di un vaso (dal filtro di Vesselness) e se la distanza tra l’endpoint e la
centerline è minore di una certa soglia. Infine viene effettuato un veloce processo di cleaning
basato su operatori morfologici (quali ad esempio apertura e chiusura) al fine di rendere
l’immagine finale più pulita. Gli operatori morfologici sono elementi strutturali con una forma
ben definita, utilizzati per riconoscere semplici morfologie su un’immagine. L’operazione di
apertura consiste in un’operazione di erosione (utilizzata per ridurre di dimensione gli oggetti
su un’immagine) seguita da un’operazione di dilatazione (utilizzata invece per ingrandirli).
In altre parole, l’operazione di apertura è utilizzata per uniformare lo sfondo ed eliminare
piccoli oggetti isolati. L’operazione di chiusura è l’inverso dell’operazione di apertura.
In Figura 5.10 e Figura 5.11 è mostrato, rispettivamente, un esempio di ricerca compiuta di
62
una centerline e un esempio di postprocessing utilizzato per unire due segmenti di centerlines
in una zona di ramificazione del letto vascolare.
Figura 5.10: Esempio di centerline estratta da un vaso di interesse. I punti gialli rappresentano la ricerca positiva, quelli azzurri la ricerca negativa. I punti rossi rappresentano i ridge
points da cui la ricerca ha avuto inzio.
Figura 5.11: Esempio di postprocessing utilizzato per l’unione di due segmenti di centerlines
in una zona di ramificazione del letto vascolare.
5.3
Esempio di applicazione 2D su fundus retinico
In questo paragrafo viene presentato un esempio completo di elaborazione di un’immagine
di fundus retinico, partendo dal filtraggio Vesselness ed arrivando all’individuazione delle
centerlines della rete vascolare.
63
Figura 5.12: Immagine di partenza (sinistra) e immagine filtrata con il filtro di Vesselness
(destra).
Figura 5.13: Seed points (in blu).
Figura 5.14: Ingrandimenti della rete vascolare che mostrano con maggior dettaglio la
distribuzione spaziale dei seeds (in blu).
64
Figura 5.15: Punti di massimo 1D (in verde).
Figura 5.16: Ingrandimenti della rete vascolare che mostrano con maggior dettaglio la
distribuzione spaziale dei punti di massimo 1D (in verde).
Figura 5.17: Ridge points (in rosso) mostrati sull’intera immagine (sinistra) e su un suo
ingrandimento (destra).
65
Figura 5.18: Ricerca positiva (in giallo) e negativa (in azzurro) della centerline dell’intera
rete vascolare.
Figura 5.19: Ricerca positiva (in giallo) e negativa (in azzurro) della centerline visualizzata
su ingrandimenti dell’immagine.
66
5.4
Esempio di applicazione 3D su immagini di Risonanza
Magnetica
In questa sezione viene presentato un esempio di applicazione dell’algoritmo di estrazione
delle centerlines in tre dimensioni. Viene utilizzata un’immagine volumetrica di Risonanza
Magnetica acquisita presso l’azienda ospedaliera S. Giovanni B. Molinette (Torino, Italia).
Ogni fetta bidimensionale di cui è composta l’immagine mostra, lungo il piano orizzontale
(trasverso), una sezione del torace di un paziente maschio sano.
Figura 5.20: Alcune fette bidimensionali che compongono l’immagine volumetrica ottenuta
mediante Risonanza Magnetica. Nelle singole fette sono rappresentate sezioni trasversali del
torace del paziente.
Lo spessore di ogni fetta (codificata su 16 bit) è di 3 millimetri e ogni suo pixel ha dimensioni quadrate di circa 0.75∗0.75 millimetri. Le immagini 2D mostrano (in direzione
cranio-caudale) il muscolo cardiaco del paziente e la piccola circolazione (circolazione polmonare). Prima di poter estrarre le centerlines dalla circolazione polmonare è stato necessario
effettuare una pulizia dell’immagine volumetrica per eliminare le strutture superflue e una
segmentazione del muscolo cardiaco.
Come primo passo si è selezionata una ROI (Regione di Interesse) per escludere il torace e
il dorso del paziente. Successivamente si è effettuato un leggero Global Thresholding e una
rimozione degli oggetti (componenti connesse) di piccole dimensioni. Al termine di questo
semplice processo iniziale restano sull’immagine il muscolo cardiaco (con arco aortico e vena
cava ben visibili) e la circolazione polmonare di cui si vogliono individuare le centerlines (Figura 5.21, a sinistra).
Come secondo step si è resa necessaria la segmentazione del muscolo cardiaco. A tale fine
si è utilizzata la tecnica del Region Growing a doppia soglia. I metodi di segmentazione
basati su regioni spaziali ben definite (di cui il Region Growing fa parte) hanno lo scopo di
67
aggiungere un’informazione morfologica nel processo di segmentazione di un oggetto (hanno
dunque in genere prestazioni migliori rispetto ai metodi basati solo sui valori di intensità
dei pixel, come il Global Thresholding). Tali metodi ricercano le regioni connesse basandosi
sulla similarità dei pixel al loro interno, con lo scopo di identificare le zone che corrispondono
all’oggetto (anche di forma complessa) che si desidera segmentare. Il Region Growing è una
procedura bottom-up che inizia con alcuni pixel (seeds) posizionati nell’oggetto di interesse.
A partire dai seeds vengono aggiunti alla segmentazione altri pixel (in modo iterativo) che
presentano proprietà simili (ad esempio luminosità, colore, geometria), fino a raggiungere
dall’interno i contorni dell’oggetto di interesse. Nel presente lavoro si è scelto di implementare un semplice Region Growing a doppia soglia; piantando manualmente 5 seeds all’interno
del muscolo cardiaco si valuta la loro massima e la loro minima luminosità. Successivamente,
partendo dai seeds, si aggiungono alla procedura di segmentazione tutti i pixel che presentano
un’intensità compresa tra i valori di luminosità massima e minima dei seeds. In tal modo,
l’intero oggetto viene identificato, e le iterazioni si fermano appena viene raggiunto lo sfondo
al di là dei contorni dell’oggetto. Questo processo, semplice e veloce, permette di segmentare il muscolo cardiaco e i suoi principali vasi in modo sufficientemente preciso per gli scopi
di questa tesi. Il risultato del processo di Region Growing è mostrato in Figura 5.21, a destra.
Figura 5.21: Rendering 3D (ottenuti con il software ImageJ R ) dell’immagine volumetrica
di Risonanza Magnetica dopo il processo di Global Thresholding e di rimozione di piccole
componenti connesse (sinistra) e dopo il Region Growing (a destra).
Una volta segmentato il muscolo cardiaco è possibile estrarlo dall’immagine (Figura 5.22),
sulla quale restano solo i vasi della piccola circolazione. Infine si filtra il volume ottenuto con
il filtro di Vesselness (per garantire maggiore continuità e uniformità alla rete vascolare) e
si effettua un processo di interpolazione (Cubic Spline Interpolation), tenendo conto dello
spessore di una singola fetta, per riprodurre i risultati in scala corretta (Figura 5.23).
A questo punto vengono estratte le centerlines sull’immagine in tre dimensioni.
68
Figura 5.22: Muscolo cardiaco segmentato ed estratto dall’immagine (il rendering 3D è stato
ottenuto con il software V M T K R ).
Figura 5.23: Circolazione polmonare isolata sull’immagine (sinistra) e sue centerlines (destra)
(i rendering 3D sono stati ottenuti con il software V M T K R ).
69
5.5
Conclusioni
L’algoritmo per l’individuazione delle centerlines presentato in questo capitolo si avvale di
un approccio diverso rispetto a molti algoritmi descritti in letteratura. Presenta innanzitutto
un alto grado di automazione: l’unico parametro a dover essere impostato dall’utente è la
scelta del percentile che definisce il numero di seed points. Tuttavia, prefiltrando le immagini
con il filtro di Vesselness, questa operazione risulta molto facile ed intuitiva. Inoltre, grazie
ai restrittivi criteri matematici imposti per trovare i ridge points e al severo meccanismo di
ricerca della centerline, è garantito un alto grado di precisione. Il tempo computazionale
non è particolarmente gravoso: per le immagini 2D sono richiesti alcuni secondi, mentre
per le immagini volumetriche alcune decine di minuti. Inoltre, a differenza di molti metodi
proposti in letteratura, non dipende da alcun tipo di scala spaziale con la quale viene calcolato
l’Hessiano dell’immagine. Presenta anche (cosı̀ come il filtro di Vesselness) un alto grado
di versatilità, rendendosi applicabile a immagini ottenute con diverse tecniche di imaging.
Infine, un ulteriore vantaggio è dato dal fatto che non è richiesta la segmentazione delle
strutture vascolari per estrarre le centerlines. Va detto, comunque, che l’applicazione di
questo algoritmo su immagini funzionali (ad esempio i Power Doppler delle lesioni tiroidee)
non fornisce ancora risultati pienamente soddisfacenti. Ciò è dovuto alla scarsa informazione
morfologica presente su questo tipo di immagini e all’alto contenuto di rumore. Si cercherà
di superare questo problema nel capitolo seguente, unendo i benefici dati da un processo di
skeleton con quelli forniti dall’algoritmo di estrazione delle centerlines.
5.6
Risultati
In questa sezione vengono mostrati alcuni risultati (sia 2D che 3D) dell’algoritmo. Tutte le
immagini sono state prima filtrate con il filtro di Vesselness.
Figura 5.24: Immagine DSA originale (sinistra) e centerlines della rete vascolare (destra).
70
Figura 5.25: Immagine di fundus retinico originale (sinistra) e centerlines della rete vascolare
(destra).
Figura 5.26: Immagine MRA del poligono di Willis (sinistra) e centerlines della rete vascolare
(destra).
71
Figura 5.27: Immagine DSA originale (sinistra) e centerlines della rete vascolare (destra).
Figura 5.28: Alcune fette bidimensionali del volume Power Doppler di un nodulo tiroideo
classificato TIR 2.
Figura 5.29: Rendering 3D delle rete vascolare ottenuta mediante l’applicazione dell’algoritmo
di estrazione delle centerlines al nodulo TIR 2 mostrato in Figura 5.28.
72
Figura 5.30: Alcune fette bidimensionali del volume Power Doppler di un nodulo tiroideo
classificato TIR 3.
Figura 5.31: Rendering 3D delle rete vascolare ottenuta mediante l’applicazione dell’algoritmo
di estrazione delle centerlines al nodulo TIR 3 mostrato in Figura 5.30.
73
Figura 5.32: Alcune fette bidimensionali del volume Power Doppler di un nodulo tiroideo
classificato TIR 3.
Figura 5.33: Rendering 3D delle rete vascolare ottenuta mediante l’applicazione dell’algoritmo
di estrazione delle centerlines al nodulo TIR 3 mostrato in Figura 5.32.
74
Figura 5.34: Alcune fette bidimensionali del volume Power Doppler di un nodulo tiroideo
classificato TIR 3.
Figura 5.35: Rendering 3D delle rete vascolare ottenuta mediante l’applicazione dell’algoritmo
di estrazione delle centerlines al nodulo TIR 3 mostrato in Figura 5.34.
75
Figura 5.36: Alcune fette bidimensionali del volume Power Doppler di un nodulo tiroideo
classificato TIR 5.
Figura 5.37: Rendering 3D delle rete vascolare ottenuta mediante l’applicazione dell’algoritmo
di estrazione delle centerlines al nodulo TIR 5 mostrato in Figura 5.36.
76
Capitolo 6
Algoritmo di skeleton per il
tracking vascolare di lesioni tiroidee
6.1
Introduzione
Il processo di skeletonizzazione (o skeleton) è una trasformazione di una componente di un’immagine digitale in un suo sottoinsieme (subset) di pixel. L’obiettivo di tutti i meccanismi
di skeleton è ridurre la quantità di dati associati ad un oggetto per ottenere la sua forma
minima, allo scopo di effettuare più agilmente misurazioni quantitative dell’oggetto (eventualmente anche in vista di una sua successiva classificazione). Inoltre, la trasformazione di
una componente di un’immagine in un oggetto che mostra solo le sue caratteristiche essenziali
può risultare utile nell’eliminazione del rumore.
La forma tubolare di un vaso sanguigno lo rende particolarmente adatto alla skeletonizzazione: lo skeleton di un albero vascolare è, nel caso ideale, un albero di curve ed archi connessi
nello spazio che rappresentano gli assi dei vasi e le loro ramificazioni.
Esiste una grande varietà di metodi di skeleton (sequenziali e paralleli) per immagini e dati
continui e discreti, in due e in tre dimensioni. Gli algoritmi vengono classificati in base al tipo
di approccio utilizzato (i principali sono costituiti da thinning topologico, mappe di distanza e
diagrammi di Voronoi ) o in base ai dati di input (continui, discreti, poligonali). Dal momento
che lo scopo di questa tesi è il miglioramento della visualizzazione dei vasi sanguigni acquisiti
con diverse tecniche di imaging, verranno descritti in dettaglio solo gli algoritmi applicabili a
dati discreti (cioé algoritmi per immagini digitali). In generale, l’applicazione diretta dei metodi di skeletonizzazione discreti presenta alcuni problemi: dati rumorosi producono skeleton
con troppe ramificazioni e la quantità e la forma dello skeleton dipendono molto dalla metrica
utilizzata. Inoltre lo skeleton può non riuscire a preservare tutte le connessioni fisiologiche
della rete vascolare rappresentata sull’immagine digitale; ciò è dovuto alla risoluzione spaziale
finita e diversa da immagine a immagine.
Vengono ora descritti i principali algoritmi su cui è basata la maggior parte dei metodi di
skeletonizzazione proposti in letteratura.
6.1.1
Algoritmi di thinning
In questi metodi il contorno di un oggetto binario viene eroso iterativamente, eliminando per
ogni iterazione i pixel che soddisfano dei vincoli geometrici o morfologici ben definiti. Almeno in teoria gli algoritmi di thinning dovrebbero preservare la topologia dell’oggetto, ma
la simmetria dello skeleton che ne deriva (rispetto all’asse del vaso) e la preservazione delle
connettività risulta un compito difficile se si opera su dati discreti. Algoritmi di topologia
discreta [12], [13], [14] forniscono basi teoriche per superare questi problemi: i pixel sono
classificati in funzione del loro intorno come appartenenti ai bordi dell’oggetto, allo sfondo
o all’oggetto. Se un punto viene classificato sia come oggetto che come suo bordo non vie77
ne eliminato; questo permette di preservare le connessioni dello skeleton ottenuto mediante
il processo di thinning. Un’altra teoria applicata agli algoritmi di thinning è la morfologia
matematica [15], [16], [17]; qui il processo di skeletonizzazione è guidato da alcuni elementi
strutturali e operatori morfologici quali dilatazione, erosione, apertura e chiusura. Questi
processi sono in genere molto veloci, ma risulta critico definire in modo corretto (di volta in
volta) la forma e la dimensione dell’elemento strutturale responsabile del processo di erosione.
Gli algoritmi di thinning basati sull’informazione topologica dell’immagine sono stati applicati, in letteratura, da diversi autori. Palagyi [14] presenta un algoritmo di thinning sequenziale
per oggetti segmentati (ovvero rappresentati su una maschera binaria) e lo applica per valutare l’asse dei vasi in ambito cardiologico (aneurismi aortici). Dokladal [13] propone un
metodo di skeletonizzazione in tre dimensioni composto da due step principali ed applicabile
a oggetti in scala di grigi. Tale algoritmo utilizza meccanismi di erosione guidati dai valori di luminosità dei pixel degli oggetti. Flynn [16] applica invece un algoritmo di thinning
topologico per l’individuazione automatica dei vasi sanguigni su immagini digitali in ambito
oftalmologico. Ancora, Selle [18] ha implementato un metodo di thinning per costruire un
grafo caratteristico per ogni vaso sanguigno identificato su un’immagine di un fegato umano,
permettendo cosı̀ di compiere numerose analisi sulla struttura vascolare epatica.
6.1.2
Algoritmi basati su Distance Transform
Gli algoritmi di skeleton basati su Distance Transform sono costruiti, per la maggior parte,
dalla definizione fornita da Blum [19]: lo skeleton di un oggetto continuo in due dimensioni è
costituito dall’insieme di punti che sono equidistanti da almeno due pixel appartenenti al contorno dell’oggetto. La Distance Transform di un dato binario (dunque di un’immagine digitale
che presenta solamente due colori, di solito il bianco e il nero) è quel processo che assegna ad
ogni pixel dell’oggetto la sua distanza dal più vicino pixel appartenente allo sfondo. Generalmente viene utilizzata la distanza euclidea, ma sono in uso anche altre tipologie di metriche
(quasi-euclidea, chessboard, cityblock). Dal momento che, ad oggi, si lavora esclusivamente
su immagini di tipo digitale, la distanza calcolata viene di solito approssimata al numero
intero di pixel più vicino al suo valore vero. In ogni caso, il tipo di approssimazione discreta
della distanza dipende dalla sua applicazione. Uno dei più conosciuti tipi di approssimazione
è quello che dà origine al processo di skeletonizzazione (basato su Distance Transform) detto
M AT D (Discrete Medial Axes Transform) [20], applicabile sia ad immagini 2D che volumetriche. In questo algoritmo lo skeleton di un oggetto è definito come i centri delle massime
sfere costruite assumendo il loro raggio uguale alla Distance Transform calcolata. Oltre al
M AT D esistono numerosi altri algoritmi di skeleton che coinvolgono il calcolo di vari tipi
di distanze; non verranno qui descritti in quanto non indispensabili alla trattazione. Spesso,
comunque, tali algoritmi non sono sufficienti a fornire un grado di dettaglio soddisfacente di
una rete vascolare, specialmente se applicati ad immagini con scarso contenuto morfologico.
Inoltre richiedono, nella maggioranza dei casi, un preprocessing per segmentare le strutture
vascolari di interesse al fine di distinguerle dagli altri oggetti presenti sull’immagine o dallo
sfondo.
6.1.3
Algoritmi basati sui diagrammi di Voronoi
In matematica, un diagramma di Voronoi è un particolare tipo di decomposizione di uno
spazio metrico determinata dalle distanze rispetto ad un certo insieme discreto di elementi
dello spazio (ad esempio un insieme finito di punti) [21]. Nel caso più semplice e comune,
quello del piano, dato un insieme finito di punti S, il diagramma di Voronoi per S è la
partizione del piano che associa una regione V (P ) ad ogni punto P ∈S in modo che tutti i
punti di V (P ) siano più vicini a P che ad ogni altro punto in S. Nel caso di strutture vascolari
rappresentate su un’immagine 2D, l’insieme V (P ) corrisponde alle massime circonferenze
inscritte nel vaso di interesse, e l’insieme finito di punti S coincide con l’asse del vaso (e
78
dunque con lo skeleton). Nel caso di strutture vascolari rappresentate in tre dimensioni, le
regioni V (P ) assumono forma sferica.
Questi skeleton permettono di superare le difficoltà degli algoritmi di thinning topologici
e di quelli che utilizzano la Distance Transform, rimpiazzando la mappatura in distanze
discrete con i diagramma di Voronoi dei pixel del vaso. Va detto che, a causa del processo
di discretizzazione del vaso (necessario per tracciare i diagrammi), gli skeleton di Voronoi
approssimano solamente il suo asse centrale, convergendo verso di esso con l’aumentare della
frequenza di campionamento. Un inconveniente di questo tipo di algoritmi è dato dal fatto
che, sempre a causa del processo di discretizzazione, lo skeleton finale può contenere un
numero di ramificazioni (generalmente molto corte) maggiore rispetto a quello della reale rete
vascolare (problema comunque non completamente estraneo anche agli algoritmi di thinning).
Vengono dunque utilizzati algoritmi di postprocessing con lo scopo di ridurre in numero tali
ramificazioni non fisiologiche. Infine, anche questo tipo di algoritmo è pensato per funzionare
al meglio su immagini morfologiche: le sue prestazioni su immagini di tipo funzionale sono
generalmente scarse.
6.2
Semplice algoritmo di skeleton basato su Distance Transform 3D
Inizialmente si è implementato un semplice algoritmo di skeleton 3D basato su Distance Transform, e il suo funzionamento è stato testato sui volumi Power Doppler di lesioni tiroidee.
Dopo una prima segmentazione delle strutture di interesse (processo semplice nel caso dei
Doppler, dove l’informazione di flusso ematico è fornita dalla codifica colore) si individuano
le strutture connesse sull’immagine in tre dimensioni. Per ogni componente connessa identificata si calcola la sua Distance Transform (euclidea) e si erode l’oggetto fino a mantenere solo
il suo valore massimo di distanza. In questo modo l’informazione rimanente sull’immagine
segmentata viene ridotta al minimo.
Com’era da aspettarsi il risultato non è soddisfacente. Non avendo praticamente nessuna
informazione morfologica, il risultato del processo di skeletonizzazione dà origine ad una serie
di spot bianchi che al più possono dare un’indicazione sulla densità vascolare dell’immagine.
E’ comunque possibile, ovviamente, impostare a piacere il grado di erosione dell’immagine
binaria di partenza, agendo sui valori di Distance Transform. Tuttavia, se la soglia di eliminazione dei pixel (ognuno dei quali ha associato un determinato valore di distanza dallo
sfondo) è troppo bassa, il rischio è di produrre un’immagine 3D contenente ancora troppe
strutture sovrapposte l’una all’altra impossibili da distinguere. Qualunque sia il grado di
erosione scelto, questo metodo (seppur di facile implementazione e con tempi computazionali
talmente bassi da poter essere considerato istantaneo) fornisce risultati senza alcuna valenza
diagnostica.
Figura 6.1: Risultati dell’algoritmo basato solo su Distance Transform (euclidea) applicato a
tre lesioni tiroidee (da sinistra a destra: TIR 2, TIR 3, TIR 5).
79
6.3
Algoritmo di skeleton basato su Distance Transform e su
altri criteri geometrici
Viste le scarsissime prestazioni dell’algoritmo presentato nel paragrafo precedente, si è cercato
di migliorarlo aggiungendo, oltre alla Distance Transform, altre metodiche che lo rendessero più adatto a lavorare su immagini funzionali (Power Doppler). Si è scelto, per ora, di
continuare a lavorare sulla tipologia di skeleton geometrici (invece che topologici o basati
sui diagrammi di Voronoi) in quanto presentano un costo computazionale nettamente meno
esoso. Inoltre, anche gli altri tipi di skeleton presentano non pochi ostacoli da superare prima
di un’efficace applicazione su immagini con cosı̀ scarsa informazione morfologica.
Il metodo presentato in questa sezione inizia sempre suddividendo il volume in tante maschere
binarie quanti sono gli oggetti connessi identificati, in modo da poter lavorare separatamente
su ognuno di essi. Per ogni oggetto connesso (vaso sanguigno) si identificano i suoi tre assi
(nelle direzioni x, y, e z) e viene calcolato il suo centroide (Figura 6.2).
Figura 6.2: Schema dell’identificazione dei tre assi di un oggetto connesso e del suo centroide.
Il piano (x,y) è il piano a cui appartiene ogni singola fetta 2D del volume; l’asse z è invece
perpendicolare a ogni fetta ed è diretto in direzione della profondità del volume. Le quantità
dx, dy, dz sono i tre assi dell’oggetto nelle rispettive direzione; il loro punto di intersezione
(C) è il centroide.
Si identifica quindi l’asse maggiore dell’oggetto. Se l’asse maggiore è quello in direzione z
(cioé in direzione perpendicolare alle fette bidimensionali che compongono l’immagine volumetrica), si scompone l’oggetto lungo tanti piani (quante sono le fette) ortogonali rispetto a
z e lo si erode, sempre dopo aver calcolato la Distance Transform, non sul suo intero volume,
ma fetta per fetta (Figura 6.3 e Figura 6.4).
In caso contrario (Figura 6.5) invece l’oggetto viene eroso utilizzando il metodo della
Medial Axes Transformation (M AT D). Tale processo genera il cosiddetto Medial Axes Skeleton, che può essere definito come l’insieme dei punti che sono equidistanti dai due punti
(più vicini) che appartengono ai bordi dell’oggetto [22].
Questo metodo di skeleton cerca dunque di supplire ai limiti del precedente algoritmo
basato esclusivamente sulla Distance Transform in tre dimensioni. Tuttavia, pur essendo
automatico, ha alti costi computazionali e non fornisce ancora i risultati sperati. Risulta molto
80
Figura 6.3: Esempio schematico di strutture il cui asse maggiore è parallelo all’asse z.
Figura 6.4: Ogni vaso il cui asse maggiore è parallelo alla direzione z è suddiviso in tante
fette. Per ogni fetta è calcolata la Distance Transform euclidea, e ognuna di esse viene erosa
fino a mantenere soltanto il suo valore massimo di Distance Transform.
performante su immagini morfologiche in cui i vasi possono essere assunti come strutture
geometriche quasi perfette di forma tubolare (come mostra il modello in Figura 6.6), ma
non riesce a produrre una rete vascolare distinguibile se applicato ad immagini funzionali
(Figura 6.7).
81
Figura 6.5: Esempi schematici di strutture il cui asse maggiore viene identificato come
appartenente al piano (x,y).
Figura 6.6: Risultato dello skeleton geometrico su un modello ideale. Si noti come, in questo
caso, lo skeleton minimo (a destra) rappresenta fedelmente il volume originale.
Figura 6.7: Risultati del processo di skeleton geometrico applicato a tre volumi Power Doppler
di lesioni tiroidee: TIR 2 (i), TIR 3 (ii), TIR 5 (iii).
82
6.4
Algoritmo di thinning
Si è dunque implementato un terzo algoritmo, questa volta basato su un metodo di thinning
automatico, per cercare di supplire alle scarse performance (su immagini funzionali) dei due
skeleton di tipo geometrico descritti nelle sezioni precedenti. Il presente metodo lavora (come
tutti gli algoritmi presentati fino ad ora) sui volumi filtrati con l’algoritmo di Vesselness, i
cui benefici sono già stati ampiamente descritti.
Come primo passo l’algoritmo effettua, dopo una lieve rimozione del rumore, un processo di
segmentazione (basato su Global Thresholding) per generare una maschera volumetrica binaria in formato double. Il formato double di un’immagine in scala di grigi associa ad ogni pixel
un valore di intensità che va da zero (pixel completamente nero) a 1 (pixel completamente
bianco); gli altri pixel assumono valori di intensità intermedi, tanto più vicini a 1 quanto più
il tono di grigio tende al bianco (e viceversa più vicini a 0 più il pixel è scuro). Dunque sulla
maschera binaria ottenuta dopo il processo di segmentazione ogni pixel può assumere solo
due valori: 0 per lo sfondo e 1 per gli oggetti (vasi, ovvero dove è presente l’informazione di
flusso). A questo punto inizia il processo di thinning.
L’algoritmo di thinning (presentato come sempre, per semplicità di esposizione, in 2D) lavora
sugli insiemi 8-connessi (detti kernel ) di ogni pixel appartenente ad un oggetto (Figura 6.8),
cioé codificati sull’immagine con un valore di intensità pari a 1.
Figura 6.8: Kernel 8-connesso (in due dimensioni) di un pixel dell’immagine.
Si indagano iterativamente tutti i pixel dell’oggetto fino ad arrivare a convergenza (ossia
fino ad ottenere lo skeleton minimo dei vasi sanguigni). Un dato pixel dell’immagine binaria
viene eroso in una iterazione dell’algoritmo se, per quel pixel, entrambe le seguenti condizioni
sono soddisfatte:
• il pixel ha valore di intensità pari a 1 (cioé è stato identificato come parte di un vaso)
• 2 ≤ n(P ) ≤ 3, con
n(P ) =
4
X
i=1
4
X
x2i−1 ∨ x2i =
{x1 , x3 , x5 , x7 } ∨ {x2 , x4 , x6 , x8 }
(6.1)
i=1
dove {x1 , x3 , x5 , x7 } e {x2 , x4 , x6 , x8 } sono due sottoinsiemi del kernel 8-connesso del
pixel P (più precisamente, sono i due possibili insiemi 4-connessi del pixel P ).
Dunque il pixel P viene eroso se, e solo se, la somma dell’unione tra i due sottoinsiemi
di pixel dell’intorno {x1 , x3 , x5 , x7 } e {x2 , x4 , x6 , x8 } fornisce un risultato numerico compreso
tra 2 e 3 (estremi inclusi). In Figura 6.9 sono mostrati alcuni esempi del funzionamento
dell’algoritmo.
Dopo il processo di thinning l’algoritmo effettua una rimozione delle ramificazioni dello
skeleton della rete vascolare che risultano troppo corte. Tali ramificazioni, infatti, sono da
83
Figura 6.9: Alcuni esempi schematici del funzionamento dell’algoritmo di thinning (in due
dimensioni). Ognuno degli otto esempi mostra l’intorno 8-connesso di un determinato pixel
della maschera binaria (si ricorda che un pixel bianco appartiene a un oggetto e un pixel nero
allo sfondo). Nei quattro casi nella parte superiore della figura il pixel P viene eroso in una
iterazione dell’algoritmo. Nei quattro casi in basso, invece, il pixel P non viene eliminato.
considerarsi come errori dovuti al processo di erosione piuttosto che un prolungamento o una
diramazione naturale del letto vascolare. Dunque, scelta una soglia di lunghezza e identificato
il percorso principale di ogni vaso, tutte le ramificazioni con lunghezza inferiore alla soglia
vengono eliminate. Un semplice esempio esplicativo è mostrato in Figura 6.10.
Figura 6.10: Semplice esempio di rimozione delle ramificazioni troppo corte dallo skeleton
di un letto vascolare. Viene mostrato il vaso originale (i) con evidenziati i suoi estremi
(endpoints) in blu e i punti di ramificazione (branchpoints) in rosso. Attraverso il calcolo di
tutte le possibili distanze (lungo il percorso del vaso) tra gli endpoints si identifica il percorso
vascolare principale. Successivamente viene misurata la lunghezza di ogni ramificazione che
dirama dal letto principale; se il risultato è inferiore alla soglia impostata, la ramificazione
viene eliminata (ii).
84
Infine, come ultimo step, viene effettuata una pulitura dello skeleton ottenuto mediante
operatori morfologici.
Come mostrano i seguenti risultati, questo algoritmo di thinning ha prestazioni nettamente
superiori agli algoritmi di skeleton descritti in precedenza: l’architettura e la distribuzione
spaziale della rete vascolare del tumore sono ora chiaramente distinguibili.
Figura 6.11: Nodulo tiroideo classificato TIR 2. Skeleton ottenuto mediante l’algoritmo di
thinning (i) e correlazione spaziale tra volume Power Doppler originale e skeleton (ii).
Figura 6.12: Nodulo tiroideo classificato TIR 3. Skeleton ottenuto mediante l’algoritmo di
thinning (i) e correlazione spaziale tra volume Power Doppler originale e skeleton (ii).
85
Figura 6.13: Nodulo tiroideo classificato TIR 3. Skeleton ottenuto mediante l’algoritmo di
thinning (i) e correlazione spaziale tra volume Power Doppler originale e skeleton (ii).
Figura 6.14: Nodulo tiroideo classificato TIR 3. Skeleton ottenuto mediante l’algoritmo di
thinning (i) e correlazione spaziale tra volume Power Doppler originale e skeleton (ii).
86
Figura 6.15: Nodulo tiroideo classificato TIR 5. Skeleton ottenuto mediante l’algoritmo di
thinning (i) e correlazione spaziale tra volume Power Doppler originale e skeleton (ii).
87
6.5
Unione dei processi di thinning e di estrazione delle centerlines
L’algoritmo di thinning descritto nel paragrafo precedente ha dimostrato di poter fornire buoni risultati nella visualizzazione della rete vascolare di un tumore. Tuttavia non tiene conto
dell’informazione del flusso ematico data dalla tecnica Power Doppler utilizzata per acquisire
le immagini delle lesioni. Per ovviare a questo inconveniente, si è deciso di unire i benefici
di tale algoritmo con il software di estrazione delle centerlines dei vasi sanguigni presentato
nel capitolo 5. Quest’ultimo risulta più preciso dell’algoritmo di thinning, in quanto è governato da criteri matematici molto rigorosi. D’altra parte, si è visto che applicare l’algoritmo
di centerlines direttamente ai volumi Doppler filtrati con il filtro di Vesselness non produce
risultati ottimali, a causa del basso grado di morfologia delle immagini flussimetriche.
Applicando prima l’algoritmo di thinning, ma bloccando le iterazioni di erosione prima che
l’algoritmo raggiunga la convergenza, si può aggiungere informazione morfologica alle immagini filtrate Vesselness. Il risultato della localizzazione delle centerlines diventa dunque molto
più affidabile se applicato ad un volume già parzialmente eroso dal metodo di thinning, anche
in vista di un successivo processo di features extraction.
Entrambi gli algoritmi, comunque, riescono a visualizzare in modo chiaro ed evidente l’architettura della rete vascolare, e si rivelano dunque di grande aiuto per il medico nel processo
di diagnosi differenziale della lesione.
Figura 6.16: Risultati del processo di thinning fermando l’algoritmo dopo un certo numero di
iterazioni. Le immagini mostrano dei rendering 3D di noduli tiroidei classificati TIR 2 (i),
TIR 3 (ii) e (iii), TIR 5 (iv).
88
Figura 6.17: Centerlines dei volumi mostrati in Figura 6.16. Le immagini mostrano dei
rendering 3D delle centerlines di noduli tiroidei classificati TIR 2 (i), TIR 3 (ii) e (iii), TIR
5 (iv).
89
Figura 6.18: Skeleton ottenuto fermando il processo di thinning dopo un certo numero di
iterazioni di un nodulo tiroideo classificato TIR 2. Il rendering 3D che mostra una maggiore
definizione è stato ottenuto mediante la visulizzazione dei risultati sul software V M T K R
90
Figura 6.19: Skeleton ottenuto fermando il processo di thinning dopo un certo numero di
iterazioni di un nodulo tiroideo classificato TIR 3. Il rendering 3D che mostra una maggiore
definizione è stato ottenuto mediante la visulizzazione dei risultati sul software V M T K R
91
Figura 6.20: Skeleton ottenuto fermando il processo di thinning dopo un certo numero di
iterazioni di un nodulo tiroideo classificato TIR 3. Il rendering 3D che mostra una maggiore
definizione è stato ottenuto mediante la visulizzazione dei risultati sul software V M T K R
92
Figura 6.21: Skeleton ottenuto fermando il processo di thinning dopo un certo numero di
iterazioni di un nodulo tiroideo classificato TIR 3. Il rendering 3D che mostra una maggiore
definizione è stato ottenuto mediante la visulizzazione dei risultati sul software V M T K R
93
Figura 6.22: Skeleton ottenuto fermando il processo di thinning dopo un certo numero di
iterazioni di un nodulo tiroideo classificato TIR 5. Il rendering 3D che mostra una maggiore
definizione è stato ottenuto mediante la visulizzazione dei risultati sul software V M T K R
94
Capitolo 7
Features extraction per l’analisi
automatica di parametri
quantitativi della lesione
7.1
Introduzione
La classificazione è spesso lo step finale di un processo di diagnosi. Consiste nel suddividere
gli oggetti di interesse in base ad alcune loro caratteristiche e di associare ogni oggetto ad
una specifica classe. Nel caso di diagnosi tumorale, il processo di classificazione può assumere
una forma continua o discreta. Nel primo caso, data una lesione sospetta, si associa a tale
lesione un numero (generalmente compreso tra 0 e 1) che ne esprime il grado di malignità.
Nel secondo caso, più semplice ed immediato ma meno preciso, il risultato del processo di
classificazione sfocia in due soli possibili esiti: lesione benigna (ad esempio a cui è associato il
valore numerico 0) o maligna (ad esempio a cui è associato il valore numerico 1). Per costruire
e validare un classificatore occorre allenarlo su un dataset di casi (pazienti) il cui esito della
sospetta lesione è noto. Inoltre occorre estrarre, da tali pazienti, alcune caratteristiche quantitative associate alla lesione. Valutando il loro valore numerico, il classificatore diventa in
grado di distinguere quali di questi parametri sono associati ad una massa benigna e quali ad
una cancerogena. Se, dopo averlo allenato, si fornisce in input al classificatore un’immagine
di una lesione la cui diagnosi differenziale è sconosciuta, esso sarà in grado di effettuare una
decisione sulla natura di tale lesione, in base a quanto ha appreso durante il suo processo di
training.
Per chiarire, si pensi a voler classificare gli oggetti su un’immagine in due tipi di forme geometriche (classi ): il cerchio ed il quadrato. Occorre estrarre alcune caratteristiche (features)
dagli oggetti presenti sull’immagine, tipiche delle due forme, con cui allenare il classificatore.
Ad esempio si può pensare di calcolare, in modo automatico, la loro area, il perimetro, la
circolarità, il loro skeleton con i suoi endpoints e branchpoints, il numero di Eulero, il rapporto
tra area e perimetro e cosı̀ via. Successivamente si considerano N forme note all’utente (con
le loro caratteristiche estratte) con cui allenare il classificatore. Durante questo processo il
classificatore impara a riconoscere quali valori numerici assumono le features calcolate per
le forme circolari e quali invece assumono per le forme quadrate. A questo punto si può
valutare la performance del classificatore su un altro gruppo di forme (sempre note all’utente) composto da n elementi. Si valuta cioé, dopo l’allenamento, quanti quadrati (o cerchi)
vengono effettivamente classificati come quadrati (o cerchi). A questo punto, se le prestazioni
sono soddisfacenti, il classificatore è pronto a prendere decisioni su forme non note all’utente,
associandole (sempre sulla base delle caratteristiche numeriche estratte) alla classe quadrati
o alla classe cerchi.
Chiaramente, non sempre la decisione presa si rivela corretta. Le prestazioni di un classificatore dipendono, tra le altre cose, dalla numerosità e dalla rappresentatività del dataset di
95
pazienti utilizzato per l’allenamento (detto training set) e dalla bontà delle caratteristiche
numeriche estratte da ogni lesione. Più queste caratteristiche assumono valori diversi tra loro
per lesioni benigne e maligne, più risulta facile diminuire il numero di falsi positivi e negativi.
In questo capitolo verrà descritto il processo utilizzato per calcolare alcuni parametri quantitativi dagli skeleton/centerlines dei noduli tiroidei (processo definito col nome di features
extraction).
Il grado di vascolarizzazione di un tumore gioca un ruolo fondamentale nel promuovere la
sua crescita e quella delle sue metastasi. I tumori solidi si affidano ai loro vasi sanguigni per
ottenere i nutrienti e l’ossigeno necessari alla sopravvivenza. Nuovi vasi offrono anche un
cammino per l’espansione del tumore; dunque aumentano la probabilità che le cellule tumorali penetrino nel sangue o nella circolazione linfatica e vadano a colonizzare altri distretti
corporei creando nuove masse cancerogene. Gli studi del grado di vascolarizzazione di un
tumore sono dunque utili per comprenderne il grado di malignità. A tal fine esistono (come
descritto nel capitolo 2) numerose tecniche di imaging. Nel decennio passato, la densità microvascolare (M V D) è stata l’indicatore prognostico maggiormente utilizzato per indagare
il grado di vascolarizzazione in numerosi tipi di tumori. La M V D prevedeva semplicemente
il conteggio del numero di vasi sanguigni in un’area microscopica. Questo approccio è semplice ed efficiente, ma probabilmente poco affidabile a causa della mancanza di informazione
morfologica o funzionale dei vasi sanguigni. Inoltre questa tecnica può essere effettuata solo
dopo la resezione chirurgica del tumore primario.
Tecniche di imaging rapide e non invasive possono risultare un’alternativa migliore per valutare la vascolarizzazione di una lesione. Inoltre un software integrato di image processing può
fornire ulteriori informazioni (qualitative e quantitative) sulla dinamica dei vasi sanguigni.
Le modalità di imaging correntemente utilizzate per la visualizzazione di strutture vascolari
tumorali includono la tomografia computerizzata (CT ) con mezzo di contrasto, la risonanza
magnetica (M R), la tomografia ad emissione di positroni (P ET ) e gli ultrasuoni (U S). Per
molti tipi di tumori non vi è un metodo preferenziale, in quanto risulta difficile stabilire quale
sistema di imaging è più appropriato per determinare le caratteristiche dei vasi sanguigni
tumorali. In questa tesi è stata principalmente adottata la tecnica del Power Doppler 3D
(ultrasuoni) per valutare specifiche caratteristiche della vascolarizzazione associata ai tumori
tiroidei. Gli ultrasuoni presentano numerosi vantaggi: poco costosi, sicuri, poco ingombro
dato dalla macchina, rapidità e semplicità dell’esame. Con l’avanzamento della tecnologia
ed il miglioramento della risoluzione, i medici possono utilizzare la tecnica Doppler per identificare alcune caratteristiche vascolari e calcolare un indice di vascolarizzazione dei tessuti
maligni. Il convenzionale Color Doppler identifica il flusso sanguigno utilizzando lo shift
medio della frequenza Doppler in una particolare posizione dove la frequenza del segnale è
determinata, in prima approssimazione, dalla velocità dei globuli rossi. Il più grande limite
della tecnica Color Doppler è quello di avere una forte dipendenza dai cambiamenti di direzione della sonda ultrasonora. Il Power Doppler invece decodifica la potenza del segnale
(che fondamentalmente dipende dalla quantità di sangue presente sotto la sonda) e risulta
più robusto nell’identificazione anche di flussi ematici lenti e alterazioni della velocità degli
eritrociti.
Vi sono numerosi studi in letteratura volti ad identificare parametri numerici che testimonino
un grado di vascolarizzazione anormale in una sospetta neoplasia. Ad esempio, Wu [24] calcola, dall’intensità del segnale Doppler, un’indice di vascolarizzazione (V I) per misurare la
quantità di vasi sanguigni nei tumori su 125 pazienti con linfadenopatia cervicale. Tale studio
riconosce diversi tipi di patterns vascolari in casi benigni e maligni, e conclude che valori più
alti di V I possono condurre ad un aumento di probabilità di tumore maligno. Pairleitner [25]
descrive un metodo che quantifica i vasi sanguigni in un cubo selezionato manualmente nel
volume 3D, nel quale sono calcolati tre indici che considerano il grado di vascolarizzazione e
il flusso sanguigno del tumore. Rayne-Fenning [26] presenta uno studio che adotta dei dati
96
di endometrio e ovaie in 40 pazienti per esaminare la variabilità inter-osservatore di immagini Power Doppler 3D. In ogni V OI (Volume Di Interesse) predefinito, i dati del Doppler
pulsato sono espressi in termini di V I, di indice di flusso (F I) e di indice di flusso vascolare
(V F I). Considerata la sensibilità intrinseca del Power Doppler, questo studio dimostra che
tale tecnica è affidabile e riproducibile, e dunque supporta l’uso corrente e gli sviluppi futuri
di questa tecnica nella pratica clinica.
Nel presente studio, come descritto nel precedenti capitoli, sono state valutate le prestazioni
di alcuni algoritmi di skeleton, thinning e centerlines, ed è stato progettato un nuovo algoritmo di preprocessing per l’identificazione e l’enfatizzazione delle strutture vascolari su
un’immagine (2D o 3D). Si è scelto di mantenere, per il processo di features extraction descritto in questo capitolo, l’approccio di thinning combinato alla ricerca delle centerlines, per
i vantaggi di aggiungere informazione morfologica ai dati Doppler e per il rigore matematico
della ricerca della centerline. Va detto che, dal momento che i neovasi sanguigni presentano
un diametro compreso tra i 20 e i 200 µm e che la tecnica Power Doppler normalmente ha
una risoluzione non inferiore ai 200-250 µm, lo scopo del presente lavoro è la stima della vascolarizzazione indotta dall’angiogenesi del tumore, piuttosto che della neovascolarizzazione
stessa.
Le caratteristiche (o features) quantitative estratte dai volumi di noduli tiroidei includono tre
misure di tortuosità, il numero di ramificazioni, la densità vascolare volumetrica e la distribuzione spaziale dell’architettura vascolare (perilesionale o intranodulare). Questi parametri
(e il modo in cui sono calcolati dall’algoritmo) verranno descritti in dettaglio nei paragrafi
seguenti.
7.2
Misure di tortuosità vascolare
Vengono valutate tre diverse misure di tortuosità: la Distance Metric (DM ), la Inflection
Count Metric (ICM ) e la Sum Of Angles Metric (SOAM ). Tali misure vengono effettuate
in tre regioni di interesse (ROI) posizionate in modo automatico attorno ai punti del volume
che presentano una maggiore densità vascolare. Dopo aver calcolato i profili di intensità del
volume lungo le sue tre direzioni (x, y e z), si identificano i tre voxel di massima intensità (su
x, y e z) e si costruiscono automaticamente le ROI attorno a tali punti: le dimensioni delle
ROI si adattano alle dimensioni del volume Doppler originale. In Figura 7.1 e Figura 7.2
sono mostrati, rispettivamente, due esempi di profili di intensità lungo x, y e z e un esempio
di posizionamento automatico delle ROI nei punti di massima intensità delle centerlines.
La scelta di calcolare le misure di tortuosità su tre ROI invece che su una sola o su tutto
lo skeleton permette di aumentare la consistenza dei valori di tortuosità trovati ad un costo
computazionale ragionevole (ogni ROI avrà associati i suoi valori di DM , ICM e SOAM ).
All’interno di ogni regione di interesse si identificano le reti vascolari presenti. Per ogni rete si
identifica il letto vascolare principale, cioé quello la cui lunghezza tra i suoi estremi è massima.
Su ognuno di tali letti vascolari viene calcolata la tortuosità. Nel caso vi sia più di una rete
vascolare all’interno della ROI, i valori di tortuosità calcolati per ogni letto principale di ogni
rete vengono mediati, al fine di ottenere un unico valore di DM , ICM e SOAM per ogni
ROI.
97
Figura 7.1: Esempio di profili di intensità della vascolarizzazione per due centerlines di due
noduli tiroidei.
Figura 7.2: Esempio di posizionamento automatico delle tre ROI nei luoghi di massima
densità vascolare.
98
Figura 7.3: Semplice esempio (in 2D) dell’identificazione del letto vascolare principale rispetto
alla ramificazioni. In alto: rete vascolare. In basso a sinistra: letto principale. In basso a
destra: ramificazioni. Il letto principale è quello la cui distanza lungo tutto il suo percorso
è la massima tra tutti i percorsi possibili della rete vascolare. Le distanze lungo i possibili
percorsi vengono valutate a partire da ogni endpoint del vaso.
99
7.2.1
Distance Metric (DM)
La Distance Metric è l’approccio più semplice nel calcolo della tortuosità. E’ data dal rapporto tra la lunghezza del vaso e la distanza (lineare) tra i suoi estremi (endpoints). La DM
fornisce un numero adimensionale sempre maggiore di 1 (il risultato coincide con 1 solo nel
caso di un vaso perfettamente dritto senza alcun tipo di curvatura). E’ una metrica che trova
la sua utilità nel misurare la tortuosità dei vasi con curvature lievi e senza cambi di concavità.
Figura 7.4: Schema per il calcolo della DM. L è la lunghezza del vaso, d è la distanza lineare
tra i suoi estremi. La Distance Metric è data dal rapporto Ld .
7.2.2
Inflection Count Metric (ICM)
Anche se la DM calcola quanto una curva devia da una linea perfettamente dritta, la sua
utilità è limitata. Infatti la DM può assegnare lo stesso valore di tortuosità ad un vaso che
curva molto lentamente sempre nella stessa direzione (curva a C) e ad un altro (effettivamente
molto più tortuoso) che effettua invece bruschi cambi di direzione. La metrica ICM supera
questo problema, tenendo conto dei punti dove cambia la curvatura (concavità) del vaso (punti
di flesso o inflection points). Per una curva in tre dimensioni un punto di flesso è definito come
il luogo a cui è associato un valore minimo della curvatura totale del vaso. In particolare, gli
assi normale e binormale dell’apparato Frenet-Serret cambiano orientamento passando vicino
ai 180o nei pressi di un punto di flesso. Nella geometria differenziale, le formule di FrenetSerret descrivono le proprietà geometriche di una curva nello spazio euclideo <3 rispetto al
suo movimento. In modo più specifico, le formule descrivono le derivate miste dei versori
tangente, normale e binormale. Questi vettori unitari, chiamati d’ora in avanti T, N e B (o
TNB frame) formano una base ortonormale di <3 e sono definiti come segue:
• T è il versore tangente alla curva nella direzione del movimento.
• N è il versore normale, ottenuto come la derivata di T rispetto alla lunghezza della
curva.
• B è il versore binormale, ottenuto mediante il prodotto scalare tra T e N.
I punti di flesso di una curva possono essere trovati cercando i massimi locali del prodotto
scalare ∆N · ∆N, dove ∆N rappresenta la differenza tra gli assi normali associati a due punti
contigui delle centerlines del vaso (Pk e Pk−1 ). Volendo essere più precisi, il procedimento
seguito per l’individuazione dei punti di flesso di un vaso è costituito dai passaggi seguenti.
100
Figura 7.5: Rappresentazione schematica di una curva nello spazio. Sono mostrati, in un
punto generico della curva, versori T, N e B e il piano osculatore tracciato da T e N.
Immagine tratta da wikipedia.org.
• Si calcolano i versori tangenti nel punto considerato del vaso (Pk ) e nel suo punto
precedente (Pk−1 ).
T1 = Pk − Pk−1
(7.1)
T2 = Pk+1 − Pk
(7.2)
Figura 7.6: TNB frame. Calcolo dei due versori tangenti.
• Si calcola il vettore velocità al punto Pk , approssimato dal vettore che unisce i punti
della curva Pk−1 e Pk+1 (cioé i punti precedente e successivo):
V = Pk+1 − Pk−1
(7.3)
• Si calcola il vettore accelerazione al punto Pk ; il suo valore è, approssimativamente,
dato dalla sottrazione tra T1 e T2 :
A = T2 − T1
(7.4)
• L’asse di Frenet tangente alla curva del vaso (T) in un suo punto viene calcolato come:
T=
101
V
|V|
(7.5)
• L’asse normale di Frenet (N) viene calcolato effettuando il prodotto vettoriale dei vettori
velocità e accelerazione, e poi moltiplicando (sempre vettorialmente) il risultato con il
vettore velocità. Il risultato finale viene normalizzato per ottenere un vettore a modulo
unitario.
V×A×V
N=
(7.6)
|V × A × V|
Il risultato è un versore che giace sullo stesso piano dei vettori velocità e accelerazione,
e ortogonale al vettore tangente T.
• Il terzo vettore di Frenet (binormale) può essere calcolato, se lo si desidera, moltiplicando vettorialmente T e N, ma non è indispensabile per la localizzazione dei punti di
flesso del vaso.
Per ogni punto della centerline del vaso si calcola infine il prodotto scalare ∆N · ∆N.
In Figura 7.7 è mostrato un semplice esempio di una sinusoide con tre punti di flesso. Sono
mostrati gli assi di Frenet T (in nero) e N (in bianco) per vari punti lungo la curva. La
direzione del versore N ruota di circa 180o nel passaggio da un punto di flesso (in rosso): la
lunghezza di ∆N, nel passaggio attraverso un punto di flesso, vale quindi circa 2 (nel caso
ideale). Dunque, nei punti di flesso il prodotto scalare ∆N · ∆N vale circa 2 · 2 = 4.
Figura 7.7: Esempio che mostra una curva, gli assi tangenti (in nero) e normali (in bianco),
e i punti di flesso (in rosso). Immagine tratta da [33].
Nell’algoritmo implementato in questa tesi, per far fronte al rumore e alla non-idealità,
si è imposto come criterio un prodotto ∆N · ∆N>1 per identificare un punto della curva
come punto di flesso.
La ICM di un vaso è quindi calcolata come:
ICM = DM · N IP + 1
(7.7)
dove N IP è il numero di punti di flesso della centerline del vaso.
La ICM dunque non può mai avere valori inferiori alla DM . Inoltre è molto più sensibile
alle oscillazioni della curva, e considera i vasi che presentano bruschi cambi di direzione molto
più tortuosi rispetto a vasi (di pari lunghezza) che invece seguono un lento profilo a C.
7.2.3
Sum Of Angles Metric (SOAM)
Uno svantaggio sia della DM che della ICM è che nessuno dei due metodi riesce a gestire
nel modo corretto le curve che si attorcigliano su loro stesse (coils). Dal momento che i coils
ad alta frequenza e bassa ampiezza non aggiungono un contributo significativo alla lunghezza
totale del vaso, la DM identifica tali curve come quasi dritte, assegnado loro un basso valore
di tortuosità. D’altra parte, dal momento che i coils non contengono punti di flesso, la ICM
102
non offre prestazioni molto migliori della DM nell’enfatizzare la tortuosità di tale tipo di
vaso.
Un approccio alternativo è di integrare la curvatura totale del vaso e di normalizzare per
la lunghezza del suo percorso principale. La curvatura del vaso (nel piano) nel punto Pk è
stimata calcolando il vettore T1 tra i punti Pk−1 e Pk , e il vettore T2 tra i punti Pk e Pk+1 .
I vettori vengono normalizzati, ed è ottenuto il loro prodotto scalare. E’ successivamente
calcolato l’arcocoseno dell’angolo da essi formato. Se i tre punti valutati della curva appartengono alla stessa linea, l’angolo riportato sarà nullo. Se invece i punti definiscono un picco
con basso grado di convessità, l’angolo tra i due vettori risulterà grande.
La torsione del vaso nel punto Pk è rappresentata dall’angolo tra il piano costituito dal cerchio osculatore in quel punto (la cui superficie normale è il prodotto scalare normalizzato tra
i vettori T1 e T2 ) e la superficie normale del successivo piano osculatore definito dai punti
Pk , Pk+1 e Pk+2 . Esattamente come gli assi normale e binormale di Frenet invertono la loro
direzione nel passaggio attraverso un punto di flesso, gli assi normali di due piani osculatori
adiacenti puntano in direzioni opposte quando Pk e Pk+1 giacciono ai lati opposti di un punto
di flesso (angolo di 180o ). Dunque gli angoli di torsione di un vaso presentano valori compresi
tra 0 e 180 gradi.
L’angolo totale di curvatura nel punto Pk è calcolato considerando la radice quadrata della
somma dei quadrati dell’angolo di curvatura nel piano e dell’angolo di torsione. Gli angoli
totali sono poi sommati tra loro per ogni punto della curva, e il risultato è normalizzato
dividendo per la lunghezza totale del vaso. Dunque, per ogni punto Pk l’algoritmo segue i
seguenti passi.
• Vengono calcolati i vettori tangenti T1 , T2 , T3
T1 = Pk − Pk−1
(7.8)
T2 = Pk+1 − Pk
(7.9)
T3 = Pk+2 − Pk+1
(7.10)
• Vengono calcolati l’angolo di curvatura nel piano (IPk ) e l’angolo di torsione (T Pk ):
T1
T2
−1
IPk = cos
·
(7.11)
|T1 | |T2 |
−1
T Pk = cos
T1 × T2
T2 × T3
·
|T1 × T2 | |T2 × T3 |
Figura 7.8: Calcolo dell’angolo di curvatura nel piano.
103
(7.12)
• L’angolo di curvatura totale (CPk ) è dunque dato dalla seguente formula:
p
CPk = (IPk · IPk ) + (T Pk · T Pk )
(7.13)
La metrica di tortuosità SOAM del vaso è infine data da:
P(n−3)
k=1 CPk
SOAM = P(n−1)
k=1 |Pk − Pk−1 |
(7.14)
dove n è il numero di punti della curva (cioé della centerline del vaso considerato).
Di seguito si riportano semplici esempi (in due dimensioni) di tre curve ideali tracciate a mano
e di tre vasi reali presenti su un’immagine DSA filtrata Vesselness, con i rispettivi valori di
tortuosità estratti dall’algoritmo. Nonostante la loro semplicità, queste semplici immagini
sono servite per testare l’algoritmo. I valori trovati sono in linea con quanto atteso.
Figura 7.9: Curve ideali: dall’immagine originale alle centerlines, sulle quali verranno
calcolati i valori di tortuosità.
104
Figura 7.10: Valori di tortuosità per i tre modelli ideali di vaso. Gli istogrammi in verde sotto
ogni immagine mostrano l’andamento degli angoli (coinvolti nel calcolo della SOAM) lungo
il percorso della curva. Il grafico in rosso, in basso, mostra il prodotto scalare ∆N · ∆N
(coinvolto nel calcolo della ICM) per ogni punto della curva con aspetto sinusoidale. Si nota
come sono ben distinguibili 4 picchi, corrispondenti ai 4 punti di flesso della curva. Gli altri
due vasi (quello a sinistra e quello a destra) non presentano punti di flesso, dunque i loro
grafici non sono riportati. Come atteso, la curva più a sinistra riporta valori minimi di tutte
e tre le misure. La curva al centro (con aspetto sinusoidale) riporta un’alto valore di ICM e
un basso valore di SOAM, e viceversa riporta la curva più a destra (tipico esempio di coil).
105
Figura 7.11: Esempi di vasi reali su immagini DSA filtrate Vesselness. Dopo aver individuato
le centerlines, sono stati calcolati i valori di tortuosità.
106
7.3
Densità Vascolare Volumetrica (VVD)
Come già descritto nel capitolo 3, la densità vascolare è un indicatore importante sul comportamento di un tumore allo stato solido. A causa dei fattori di crescita angiogenetici secreti
dalle cellule tumorali, un tumore tende a presentare un intricato network di vasi sanguigni
disorganizzati e immaturi. La Densità Vascolare Volumetrica (V V D) calcola la quantità di
spazio del tumore occupata dai vasi sanguigni rispetto allo spazio totale. Alti valori di V V D
indicano un’alta vascolarizzazione del tumore, mentre valori più bassi possono indicare o una
quasi assenza dell’architettura vascolare o una rete di vasi sanguigni concentrati solo in una
o poche zone del tumore. Volendo essere più specifici sul comportamento dei noduli tiroidei,
questi idealmente presentano o pochi vasi sanguigni localizzati alla periferia del nodulo (nel
caso di noduli benigni) o un’intricata rete vascolare intranodulare (nel caso di noduli maligni).
Purtroppo, non sempre la distinzione tra lesioni benigne e maligne è cosı̀ netta ed evidente.
Ad esempio, alcuni noduli classificati TIR 3 che presentano un alto grado di vascolarizzazione (magari legata all’ipercaptazione del nodulo) possono alla fine risultare benigni. Oppure
molti noduli classificati TIR 5 (e dunque maligni) presentano grosse aree di tessuto necrotico
non vascolarizzato. In ogni caso, la V V D può risultare un indicatore importante nel processo
di diagnosi e di successiva prognosi e, se considerata insieme alla altre caratteristiche estratte
dall’algoritmo, può fornire informazioni utili sul grado di vascolarizzazione di una lesione (ma
non sulla posizione spaziale delle reti vascolari all’interno del tumore).
7.4
Numero di ramificazioni (NB)
Il numero di ramificazioni presenti nell’architettura vascolare di un tumore è un indicatore
preciso del suo grado di disordine. Generalmente le lesioni non patologiche presentano una
vascolarizzazione ordinata con poche ramificazioni. Al contrario i tumori maligni, a causa
della loro alta velocità di crescita, sviluppano reti vascolari disorganizzate, tortuose e poco
mature. Le alte concentrazioni di fattori angiogenici stimolano continuamente la crescita di
nuovi vasi, che in molti casi possono diramarsi da un letto vascolare preesistente. L’angoritmo implementato in questo lavoro di tesi calcola il numero di ramificazioni non su tutte le
centerlines del tumore, ma solamente nelle tre regioni di interesse già utilizzate nel calcolo
delle misure di tortuosità. Questo permette una riduzione del costo computazionale e, allo
stesso tempo, una sufficiente attendibilità data dal calcolo del numero di ramificazioni in tre
zone diverse ad alta densità vascolare. Dei tre valori calcolati per ogni nodulo tiroideo (uno
per regione di interesse) viene mantenuto solo il massimo (più conservativo). Il metodo adottato per il calcolo del parametro N B in ogni ROI è semplice: una volta individuato il letto
principale della rete vascolare lo si separa dall’immagine volumetrica, potendo cosı̀ contare
facilmente le ramificazioni. Nel caso in cui vi sia più di una rete vascolare all’interno di una
ROI, si contano le ramificazioni di ogni rete e si mediano i risultati ottenuti.
7.5
Analisi della distribuzione spaziale dell’architettura vascolare all’interno della lesione: perilesionale o intranodulare
Come ultima feature è stata calcolata la distribuzione spaziale dell’architettura vascolare del
tumore. A differenza della V V D, che valuta solo il grado di vascolarizzazione (in percentuale)
della lesione, l’analisi spaziale distingue come tale vascolarizzazione si distribuisce all’interno
del tumore. Da precedenti studi clinici si sa che, generalmente, le lesioni benigne presentano scarsa vascolarizzazione, ordinata, con vasi di diametro maggiore e che si distribuisce
prevalentemente sul perimetro più esterno. Al contrario, le lesioni maligne presentano vasi
disorganizzati di minore diametro, concentrati sia alla periferia che all’interno, oppure solo
107
all’interno. In alcuni casi di tumori in stadio particolarmente avanzato la vascolarizzazione si
presenta scarsa, ma comunque ben riconoscibile rispetto a quella di un tumore benigno. Nel
caso infatti di tumori con zone altamente necrotiche, la poca vascolarizzazione si concentra in
genere in piccole zone interne, dove forma delle piccole reti di vasi sanguigni spesso interrotti
o fortemente intricati (mentre, nel caso di benignità, i vasi tendono a distribuirsi in modo più
omogeneo alla periferia del tumore).
Il processo di features extraction presentato in questa sezione riconosce e suddivide le lesioni (noduli tiroidei) in due classi: con vascolarizzazione perilesionale e con vascolarizzazione
intranodulare. L’algoritmo funziona nel modo seguente.
• Innanzitutto il volume con le centerlines viene ricampionato e interpolato per ottenere
una nuova immagine 3D cubica con uguali dimensioni x, y e z.
• Viene poi calcolato il suo profilo di intensità, partendo dalla periferia del tumore per
terminare nel suo punto centrale. Si immagini di inviluppare lo skeleton/centerlines del
nodulo con la sua massima sfera circoscrivibile. Successivamente la sfera viene fatta
richiudere su sé stessa, compiendo un movimento di un voxel per ogni iterazione, fino a
ridursi ad un punto (il suo centro). Per ogni iterazione si calcola, sulla superficie della
sfera, il numero di pixel bianchi (centerlines dei vasi) rispetto ai pixel neri (sfondo). Un
esempio schematico è mostrato in Figura 7.12.
Figura 7.12: Esempio grafico del movimento della sfera. Partendo dalla perferia del nodulo,
si richiude su sé stessa e ad ogni iterazione valuta la densità vascolare lungo la sua superficie
esterna. All’ultima iterazione la sfera è ridotta al punto centrale del tumore. I dati acquisiti
ad ogni iterazione permettono poi di tracciare il profilo di intensità vascolare della lesione.
In questo modo si ottiene un profilo di intensità che indica la distribuzione spaziale dei
vasi sanguigni nel tumore, dalla periferia al centro. Il profilo viene quindi plottato su
un grafico, riordinando i valori di intensità facendo sı̀ che il centro del grafico (sull’asse
delle ascisse) corrisponda al punto centrale del tumore, e gli estremi destro e sinistro
corrispondano ai suoi bordi periferici.
• Si valuta il profilo di intensità ottenuto, dal quale è possibile comprendere (anche solo
visivamente) se la lesione si presenta più vascolarizzata alla periferia (vascolarizzazione
108
perilesionale) o al centro (vascolarizzazione intranodulare). Nel primo caso il grafico
mostrerà i picchi di intensità più alti nei semipiani destro e sinistro, mentre nel secondo
caso tali picchi saranno maggiormente concentrati nella zona centrale del diagramma.
Con l’obiettivo di rendere automatico il riconoscimento del pattern spaziale della vascolarizzazione, l’algoritmo effettua alcune operazioni matematiche e decisionali sui dati
acquisiti. Innanzitutto si definisce il polinomio di secondo grado che meglio approssima
il profilo di intensità, e se ne calcola la derivata prima. Una lesione la cui vascolarizzazione è distribuita principalmente in periferia presenta una derivata prima del polinomio
o sempre positiva, o sempre negativa, oppure sia negativa che positiva, ma strettamente
crescente. Le prime due condizioni comportano un polinomio approssimante il profilo
di intensità sempre crescente o decrescente, e sono utili per riconoscere le lesioni in cui
la vascolarizzazione è sı̀ perilesionale, ma sbilanciata verso uno dei suoi due emisferi
laterali. La terza condizione invece significa avere un polinomio approssimante prima
decrescente e poi crescente, con un punto di minimo più o meno centrale al profilo di
intensità. Questo è il caso più comune di vascolarizzazione perilesionale, con i vasi sanguigni distribuiti abbastanza equamente su tutti i contorni della lesione (Figura 7.13).
Se una di queste tre condizioni non è soddisfatta la vascolarizzazione viene invece considerata intranodulare, per la quale generalmente la derivata prima si presenta monotonicamente decrescente, con valori sia positivi che negativi. Tale aspetto della derivata
implica un polinomio approssimante il profilo di intensità a forma di parabola con concavità verso il basso e con un massimo (dato dall’annullarsi della derivata prima) più o
meno centrale al profilo di intensità (Figura 7.14).
Questi veloci passaggi consentono all’algoritmo di features extraction di effettuare una divisione in due classi delle centerlines 3D dei noduli tiroidei testati. Per il dataset utilizzato,
tutti i noduli TIR 2 e un TIR 3 (benigno) vengono classificati come perilesionali, mentre i
restanti TIR 3 e tutti i TIR 5 come intranodulari.
109
Figura 7.13: Esempi di profili di intensità (a sinistra) per noduli con una vascolarizzazione
classificata perilesionale, con tracciato il polinomio approssimante di secondo grado (in blu).
Sulla destra, le loro derivate prime.
110
Figura 7.14: Esempi di profili di intensità (a sinistra) per noduli con una vascolarizzazione
classificata intranodulare, con tracciato il polinomio approssimante di secondo grado (in blu).
Sulla destra, le loro derivate prime.
111
7.6
Risultati: Tumori Tiroidei
Si riportano i risultati ottenuti in termini di tortuosità (le tre metriche), V V D, N B e analisi
spaziale della vascolarizzazione dei noduli tiroidei. Il processo di features extraction è stato
applicato ai volumi ottenuti unendo i benefici dell’algoritmo di thinning e di individuazione
delle centerlines (in quanto più robusto rispetto agli altri metodi) presentati al termine del
capitolo precedente.
I risultati sono abbastanza concordi con le conoscenze di anatomopatologia e con gli studi di
tumori post-intervento chirurgico. Infatti i noduli con comportamento maligno (tutti i TIR
5 e alcuni TIR 3) hanno valori tendenzialmente più alti per le prime cinque features e sono
classificati come intranodulari. Al contrario le lesioni benigne (tutti i TIR 2 e i restanti TIR
3) presentano minore tortuosità e meno ramificazioni. La V V D è il parametro che sembra
essere meno determinante nel discriminare i noduli benigni da quelli maligni; può al massimo
distinguere i TIR 2, in quanto generalmente più poveri in termini di vascolarizzazione. D’altra
parte ciò non sorprende troppo, essendo la V V D un parametro che indica solo il grado di
vascolarizzazione in percentuale, senza dare informazioni sulla sua posizione all’interno del
tumore. Al contrario, l’analisi spaziale (perilesionale o intranodulare) distingue bene i TIR
2 dai TIR 5, anche se presentano V V D simili tra loro.
Infine, tutte e tre le misure di tortuosità (DM , ICM , SOAM ) e il numero di ramificazioni
(N B) aumentano (anche in modo sensibile) nei noduli maligni, risultando molto utili nel
processo diagnostico. Da notare come alcuni TIR 5 presentino valori di tortuosità un po’ più
bassi rispetto ai noduli TIR 3 maligni; ciò è dovuto principalmente alle ampie zone necrotiche
avascolari caratteristiche di molti noduli TIR 5.
Anche i risultati numerici mediati sul numero di tumori testati sono significativamente più
alti per le lesioni maligne rispetto a quelle benigne. Per le masse benigne, i risultati numerici
mediati sono i seguenti: DM = 9.18 ± 6.34, ICM = 29.26 ± 19.50, SOAM = 2.86 ± 1.22,
V V D = 29.44% ± 14.81%, N B = 11.11 ± 6.4. Nel caso dei tumori maligni la media delle
features produce invece i seguenti risultati: DM = 34.77 ± 14.30, ICM = 216.48 ± 130.43,
SOAM = 11.92 ± 5.48, V V D = 39.50% ± 14.30%, N B = 34.93 ± 12.34. Per quanto riguarda
l’analisi spaziale dell’architettura vascolare, 7 lesioni benigne su 9 sono state classificate come
perilesionali, mentre tutti i tumori maligni sono stati identificati come intranodulari.
112
Analisi Quantitativa delle Architetture Vascolari di
Tumori Tiroidei (Parte 1/2)
Paziente
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Classe
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
TIR
2
2
2
2
2
2
5
5
5
5
3
3
3
3
3
3
ROI 1
19.4
16
11
1.4
2
1.6
18
1
19.2
2
10.4
30.5
21.5
5
1
13
DM
ROI 2
20
5.8
10.8
6
2.1
2.07
56
31
20
1.1
7.3
60
11
5
1.1
16
ROI 3
13
10
4
11
3
2
70
31
21.6
1.6
22
357
85
23
2.7
77
ROI 1
48
134
66
2.4
2
3.8
50
1
107.5
2.6
34
47.7
96.6
5.4
1
78
ICM
ROI 2
49
15
11
6.3
2.3
4.6
334
241
102
2.8
13.6
84
80
5.36
1.3
9.7
ROI 3
100
8.5
9.9
11.6
9.9
4.5
786
241
92
3.1
66
991
934
45
3.2
300.2
Analisi Quantitativa delle Architetture Vascolari di
Tumori Tiroidei (Parte 2/2)
Paziente
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
SOAM
ROI 1 ROI 2 ROI 3
5
5
6.7
6
2
3
2.8
2.9
1.3
0.4
1.3
3.9
0.5
0.5
1.3
0.5
0.64
0.61
4.8
23
22
0.3
9.3
9.4
7.1
7.3
6.2
0.3
0.41
0.4
4.3
2.3
6
8.8
17
110
8
3.4
31
2.2
2.2
6.6
0.5
0.5
0.83
4.3
3.28
12.6
VVD (%)
NB
P/I
Esito (B/M)
45
20
31
25
17
8
54
20
24
22
52
54
45
61
17
56
17
16
8
14
1
2
44
13
23
1
36
42
52
20
4
22
P
P
P
P
P
P
I
I
I
I
I
I
I
I
I
P
B
B
B
B
B
B
M
M
M
M
M
M
M
B
B
B
Tabella 7.1: Risultati numerici delle features estratte dai tumori tiroidei. La colonna P/I
(Perilesionale/Intranodulare) indica il risultato dell’analisi spaziale dell’architettura vascolare. L’ultima colonna indica invece l’esito del tumore identificato mediante analisi istologica
dopo l’intervento chirurgico (B=benigno, M=maligno).
113
Figura 7.15: Rendering 3D di tumori benigni alla tiroide classificati TIR 2.
114
Figura 7.16: Rendering 3D di tumori maligni alla tiroide classificati TIR 5.
115
Figura 7.17: Rendering 3D di tumori alla tiroide classificati TIR 3.
116
Figura 7.18: Risultati mediati (per le 3 regioni di interesse) di Distance Metric per i noduli
tiroidei testati.
Figura 7.19: Risultati mediati (per le 3 regioni di interesse) di Inflection Count Metric per i
noduli tiroidei testati.
117
Figura 7.20: Risultati mediati (per le 3 regioni di interesse) di Sum Of Angles Metric per i
noduli tiroidei testati.
Figura 7.21: Risultati: Densità Vascolare Volumetrica per i noduli tiroidei testati.
118
Figura 7.22: Risultati: Numero di Ramificazioni per i noduli tiroidei testati.
119
7.7
Risultati: Tumori Prostatici
I metodi e gli algoritmi implementati nell’ambito di questa tesi sono stati infine applicati
anche a immagini 3D CEU S di tumori maligni alla prostata.
Il cancro alla prostata è la più frequente tipologia di tumore maligno negli uomini di tutto il
continente occidentale. Conta il 25% di diagnosi tumorali al mondo e il 10% di decessi. Per
cancro (o carcinoma) alla prostata si intende una neoplasia maligna che si origina dalle cellule
epiteliali della prostata, una ghiandola dell’apparato genitale maschile. Questa neoplasia può
dare luogo a metastasi, con predilezione per le ossa e i linfonodi loco-regionali. Il tumore alla
prostata può causare, tra i sintomi, dolore, difficoltà nella minzione e disfunzione erettile.
Ad oggi sono state sviluppate varie terapie focalizzate alla cura di tale tumore: la radioterapia (che utilizza i raggi x per debellare le cellule tumorali), la crioablazione (che prevede
l’inserimento di barrette metalliche raffreddate ad azoto liquido attraverso la cute del perineo), la terapia ormonale, gli ultrasuoni focalizzati ad alta intensità (HIF U , che utilizzano la
concentrazione del raggio ultrasonoro per indurre il surriscaldamento e la necrosi delle cellule
tumorali). Queste tecniche possono, in alcuni casi, sostituirsi ad un trattamento più radicale
e invasivo come la prostectomia (rimozione chirurgica della ghiandola), che comporta i rischi
di incontinenza e impotenza sessuale. Chiaramente, più il tumore è diagnosticato in fase
iniziale, maggiori sono le possibilità di sopravvivenza per il paziente, cosı̀ come maggiore è
l’efficacia delle tecniche sopra descritte.
Dal punto di vista diagnostico il metodo principale è la valutazione del dosaggio del P SA (antigene prostata-specifico), un enzima prodotto dalla prostata la cui concentrazione anormale
nel sangue può essere indice di tumore. Questo metodo tuttavia non costituisce un efficiente
test di screening di massa, in quanto presenta un numero elevato di falsi positivi (circa il 76%).
Viene dunque utilizzato solo per una classificazione iniziale dei pazienti prima di un successivo
esame di biopsia. La biopsia (processo doloroso e invasivo) consiste nel prelevare fisicamente
6-12 campioni cellulari da diverse zone della prostata del paziente. Nonostante tale metodo
sia, ad oggi, il metodo diagnostico più affidabile, viene spesso ripetuto per raggiungere una
sufficiente sensitività. Inoltre tale metodo presenta l’inconveniente della scarsa localizzazione
a livello spaziale del tumore. In più, una frazione considerevole di tutti i tumori identificati
non si sviluppano in patologie che mettono in pericolo la vita del paziente. Quindi il rischio
di effettuare un trattamento chirurgico invasivo e definitivo (che comporta un peggioramento
della qualità della vita per il paziente e che si rivela poi inutile) rappresenta, ad oggi, uno dei
maggiori ostacoli da superare nel trattamento dei tumori prostatici.
Questi problemi hanno indirizzato la ricerca verso lo sviluppo di metodi migliori e non invasivi per l’identificazione e la localizzazione del cancro alla prostata. Le principali tecniche
di imaging utilizzate a tali fini sono la risonanza magnetica (anche con l’uso di mezzo di
contrasto) e l’ultrasonografia transrettale. Quest’ultima è promettente come la risonanza
magnetica, ma si presenta più vantaggiosa in termini di costi, tempo dell’esame e risoluzione
temporale. Dunque le tecniche ecografiche sono di grande importanza nella localizzazione
del tumore e possono essere anche utilizzate a livello diagnostico per valutare il suo grado di
vascolarizzazione. L’angiogenesi è infatti un indicatore chiave per la diagnosi del cancro alla
prostata, e dunque tecniche di imaging volte all’identificazione di strutture vascolari possono
essere utilizzate per valutare se diversi tipi di tumori presentano patterns vascolari differenti.
Motivando la ricerca in tal senso si potrebbe giungere alla diagnosi del tumore alla prostata
utilizzando metodiche molto meno invasive della biopsia.
In questo lavoro sono state acquisite delle immagini volumetriche di tumori alla prostata mediante ultrasonografia a mezzo di contrasto (CEU S) su topi di laboratorio nei quali è stata
indotta la crescita del tumore mediante l’utilizzo di due diverse linee cellulari, P C3 e DU 145.
Entrambe sono molto usate in ambito di ricerca. La linea cellulare P C3 è utile nell’investigare
i cambiamenti biochimici nel cancro prostatico avanzato e la risposta del tumore agli agenti
chemioterapici. Inoltre tali cellule possono essere utilizzate per creare tumori sottocutanei nei
topi, definendo cosı̀ un modello dell’ambiente tumorale nel contesto di un organismo vivente.
120
Le cellule della linea P C3 hanno un alto potenziale metastatico e non esprimono l’enzima
P SA.
La linea cellulare DU 145 è invece derivata da metastasi cerebrali e rappresenta un altro tipo
di cellule molto utilizzato in ambito di ricerca, sempre nello studio del cancro prostatico.
Hanno un potenziale metastatico più moderato rispetto alle cellule P C3 e anche loro non
esprimono il P SA. E’ stato dimostrato che le cellule DU 145 producono dei fattori solubili
che attivano i precursori degli ostoblasti (cellule del tessuto osseo), facilitando il processo
metastatico del tumore alla prostata nelle ossa.
Tutti gli algoritmi descritti in questa tesi sono stati applicati alle immagini CEU S di tumori maligni alla prostata nei topi, e si è valutato se le due linee cellulari presentano delle
differenze in termini di vascolarizzazione. In base ai risultati ottenuti (di seguito riportati),
la linea DU 145 presenta valori di tortuosità e numero di ramificazioni vascolari mediamente
più alti rispetto alla linea P C3, mentre mostra una densità vascolare volumetrica leggermente più bassa. Inoltre, i rendering 3D dei tumori mostrano delle differenze nell’architettura
vascolare. I tumori della prima linea cellulare sembrano possedere dei vasi sanguigni al loro
interno che si diramano verso la periferia. Al contrario, la seconda linea tumorale mostra
una forte componente vascolare in periferia, con qualche vaso che si estende (dalla periferia)
verso il centro della lesione.
I risultati numerici mediati per i 7 tumori disponibili DU 145 sono: DM = 89.31 ± 67.64,
ICM = 369.50 ± 432.47, SOAM = 25.27 ± 20.25, V V D = 74.86% ± 9.38%, N B = 53.14 ±
31.33. I 9 tumori P C3 presentano invece, mediamente, i seguenti risultati: DM = 24.60 ±
18.04, ICM = 44.24 ± 34.59, SOAM = 7.73 ± 6.71, V V D = 89.00% ± 4.66%, N B = 20.77
± 10.36. Inoltre, tutti i tumori sono stati classificati con vascolarizzazione intranodulare.
121
Analisi Quantitativa delle Architetture Vascolari di
Tumori Prostatici (Parte 1/2)
Topo
Classe
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
DU145
DU145
DU145
DU145
DU145
DU145
DU145
PC3
PC3
PC3
PC3
PC3
PC3
PC3
PC3
PC3
ROI 1
8.18
20
44
40
294
180
247
15.2
18.8
15
3.9
55
4.8
11.2
12.7
20
DM
ROI 2
9.6
39.58
36.7
31
172
53
53
33
5.3
41
8.4
82
2.75
19.5
24
14.5
ROI 3
6.67
17.64
33
32
132
341
68
38.6
10
26
7.2
3.3
4
33
48.2
20.1
ROI 1
8.2
77
96
80
341
875
270
31.5
81.3
55
7.2
23
4.6
33
25.9
27
ICM
ROI 2
14.5
277.48
130
97
984
190
62
40.3
9.8
111
85.7
27
2.5
115
34.76
128
ROI 3
7.34
27.27
32.8
32
419
996
78.5
41.6
8.2
80
5.3
3.26
25.4
207
12.15
27
Analisi Quantitativa delle Architetture Vascolari di
Tumori Prostatici (Parte 2/2)
Topo
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
SOAM
ROI 1 ROI 2 ROI 3
2.47
3.25
1.94
6.7
10.28
7.04
15
9
8.4
10
8
8.1
98
62
48
54
19
128
62
10
17.5
48
9.1
12.8
6.7
2.1
1.6
5.9
9.5
5.9
0.9
3
2.5
9.6
24
0.9
1.12
1.23
1.42
4.6
9.4
14.7
3.41
7.4
4.7
6.1
6
6.1
VVD (%)
NB
P/I
Esito (B/M)
69
66
75
68
76
76
94
79
92
89
95
91
88
91
85
91
19
29
60
51
68
112
33
41
21
24
9
26
6
23
23
14
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
Tabella 7.2: Risultati numerici delle features estratte dai tumori prostatici. La colonna P/I
(Perilesionale/Intranodulare) indica il risultato dell’analisi spaziale dell’architettura vascolare. L’ultima colonna indica invece l’esito del tumore (nal caso di carcinoma prostatico,
sempre maligno).
122
Figura 7.23: Esempio di alcune fette bidimensionali di un’immagine 3D CEUS di un tumore
prostatico su un topo.
Figura 7.24: Rendering 3D di tumori prostatici appartenenti alla linea cellulare DU145.
123
Figura 7.25: Rendering 3D di tumori prostatici appartenenti alla linea cellulare PC3.
Figura 7.26: Risultati mediati (per le 3 regioni di interesse) di Distance Metric per i tumori
prostatici testati. In viola: linea cellulare DU145. In blu: linea cellulare PC3.
124
Figura 7.27: Risultati mediati (per le 3 regioni di interesse) di Inflection Count Metric per i
tumori prostatici testati. In viola: linea cellulare DU145. In blu: linea cellulare PC3.
Figura 7.28: Risultati mediati (per le 3 regioni di interesse) di Sum Of Angles Metric per i
tumori prostatici testati. In viola: linea cellulare DU145. In blu: linea cellulare PC3.
125
Figura 7.29: Risultati: Densità Vascolare Volumetrica per i tumori prostatici testati. In viola:
linea cellulare DU145. In blu: linea cellulare PC3.
Figura 7.30: Risultati: Numero di Ramificazioni per i tumori prostatici testati. In viola:
linea cellulare DU145. In blu: linea cellulare PC3.
126
Figura 7.31: Esempio di rendering 3D di tumore prostatico maligno (linea cellulare DU145).
Figura 7.32: Esempio di rendering 3D di tumore prostatico maligno (linea cellulare DU145).
127
Figura 7.33: Esempio di rendering 3D di tumore prostatico maligno (linea cellulare PC3).
Figura 7.34: Esempio di rendering 3D di tumore prostatico maligno (linea cellulare PC3).
128
Conclusioni
I metodi e gli algoritmi presentati in questa tesi hanno lo scopo di valutare se differenti linee
tumorali presentano dei patterns diversi nella loro architettura vascolare, sia a livello qualitativo che quantitativo. Dal dataset disponibile è emerso che i tumori maligni presentano
numerose differenze, in termini di vascolarizzazione, rispetto alle lesioni benigne. I primi presentano dei vasi sanguigni più tortuosi e con molte ramificazioni, e la loro vascolarizzazione
si presenta spesso intricata e interna al tumore; le seconde invece si mostrano generalmente
meno vascolarizzate e con un alto grado di organizzazione gerarchica.
Inoltre è emerso che anche tra le lesioni maligne si possono presentare dei particolari patterns
di vascolarizzazione, come mostra l’analisi dei carcinomi prostatici indotti da due diverse linee
cellulari. Lo studio di diverse metodiche di visualizzazione (aumento del contrasto, skeleton,
thinning e estrazione di centerlines) ha permesso di ottimizzare il rendering di architetture
vascolari 3D, fornendo una chiara visione del tumore.
L’intero software progettato nel presente lavoro è quasi completamente automatico, con i conseguenti vantaggi di non richiedere grosse operazioni manuali e di diminuire la dipendenza
dall’utilizzatore, e richiede bassi tempi computazionali.
Un altro vantaggio è che gli algoritmi descritti sono versatili ed applicabili, in linea di massima, a diverse metodiche di imaging clinico. Nell’ambito degli ultrasuoni, preponderanti
nel presente lavoro di tesi, gli algoritmi permettono di aggiungere informazione morfologica
ad immagini prevalentemente di tipo funzionale, di estrarre l’architettura vascolare e di sottoporla ad un’analisi quantitativa automatica e veloce. Inoltre lavorare su volumi ottenuti
con gli ultrasuoni presenta il notevole vantaggio della semplicità di acquisizione, robustezza,
sicurezza per il paziente (in quanto sono in gioco radiazioni non ionizzanti) e, nel caso del
Power Doppler, assenza di mezzo di contrasto, con conseguente riduzione di tempo, rischio e
costo dell’esame.
Un requisito necessario, comunque di facile realizzazione, è la bontà dell’acquisizione del
tumore. Il box di selezione della macchina a ultrasuoni deve essere impostato in modo da
contenerlo completamente al suo interno e, se possibile, ridurre al minimo le altre componenti
vascolari che non appartengono al tumore.
La parte di analisi quantitativa dell’architettura vascolare tumorale (features extraction) è,
come detto, utile nell’identificare particolari patterns nella vascolarizzazione di diverse classi
tumorali e molto promettente nel discriminare lesioni maligne da masse benigne. Il prosieguo
naturale del presente lavoro è quello di validare questa analisi su un dataset di pazienti più
consistente, in modo da poter diventare uno strumento sempre più utile ed affidabile nella
diagnostica clinica per immagini.
129
Bibliografia
[1] H. Chen, J. Hale, An algorithm for MR angiography image enhancement, MRM,
33(4):534-40, Aprile 1995.
[2] M. M. Orkisz, Improved vessel visualization in MR angiography by nonlinear anisotropic
filtering, MRM, 37(6):914-9, Giugno 1997.
[3] A. Frangi, W. J. Niessen, K. L. Vincken, M. A. Viergever, Multiscale vessel enhancement
filtering, Computer Science, vol. 1496, p.p. 130-137, Springer, 1998.
[4] L. Antiga, B. Ene-Iordache, A. Remuzzi, Centerline computation and geometric analysis of branching tubular surfaces with applications to blood vessel modeling, Journal of
WSCG, Febbraio 2003.
[5] A. M. Mendonca, A. Campilho, Segmentation of retinal blood vessels by combining the
detection of centerlines and morphological reconstruction, IEEE Transactions on Medical
Imaging, Vol. 25, No. 9, Settembre 2006.
[6] R. Manniesing, W. Niessen, Shape constrained vessel centerline extraction by integrating
surface evolution and topology analysis, IEEE, Giugno 2006.
[7] Z. Huang, S. Jiang, Y. Liu, S. Bao, Interactive 3D liver vessels centerline extraction
based on moving sphere model, IEEE, 2014.
[8] A. Sironi, V. LePetit, P. Fua, Multiscale centerline detection by learning a scale-space
Distance Transform, Computer Vision, 2013.
[9] J. Li, H. Chen, Y. Wang, W. Wang, An efficient method for vessel Edge Detection of
fundus images, IEEE, Giugno 2006.
[10] C. Yan, S. Hirano, Y. Hata, Extraction of blood vessel in CT Angiography image aided
by Fuzzy Logic, IEEE, 2000.
[11] S. R. Aylward, E. Bullit, Initialization, noise, singularities, and scale in Height Ridge Traversal for tubular object centerline extraction, IEEE Transactions on Medical
Imaging, Vol. 21, No. 2, Febbraio 2002.
[12] G. Bertrand, S. Yoshizawa, On evolute cusps and skeleton bifurcations, Int. Conf. on
Shape Modeling and Applications, p.p. 134-141, 2001.
[13] P. Dokladal, C. Lohou, L. Perroton, G. Bertrand, A new thinning algorithm and its
applications to extraction of blood vessels, Biomedsym’ 99, p.p. 32-37, ESIEE, 1999.
[14] K. Palagyi, E. Sorantin, E. Balogh, A. Kuba, C. Halmai, B. Erodohelyi, K. Hausegger, A
sequential 3D thinning algorithm and its medical applications, LNCS, 2082:409-15, 2001.
[15] S. Eiho, Y. Qian, Detection of coronary artery tree using morphological operators,
Computers in Cardiology, 24:525-528, 1997.
130
[16] J. Flynn, Automated vessel extraction in digital ophtalmic images, Master’s Thesis,
University College Dublin, 2000.
[17] N. Maglaveras, K. Haris, S. N. Efstratiadis, J. Gourasias, G. Louridas, Artery skeleton
extraction using topographic and connected components labeling, Computer Radiology,
p.p. 265-268, IEEE, 2001.
[18] D. Selle, W. Spindler, B. Preim, H. O. Peitgen, Mathematical methods in medical image
processing: analysis of vascular structures for preoperative planning in liver surgery,
Mathematical Unlimited - 2001 and beyond, p.p. 1039-1059, Springer, 2000.
[19] H. Blum, A transformation for extracting new descriptors of shapes, Models for the
Perception of Speech and Visual Form, p.p. 362-380, MIT Press, Cambridge, 1967.
[20] A. Puig Puig, Discrete medial axis transform for discrete objects, Technical Report LSI98-22-R, Universitat Politècnica de Catalunya, 1998.
[21] R. Ogniewicz, M. Ilg, Voronoi skeletons: theory and applications, IEEE conf. of
Computer Vision and Pattern Recognition, p.p. 63-69, 1992.
[22] W. K. Pratt, Digital Image Processing, John Wiley and Sons, Inc. p.p. 417-430, Third
Edition, 2001.
[23] L. Lam, S-W. Lee, C. Y. Suen, Thinning methodologies: a comprehensive survey, IEEE
Transaction on Pattern Analysis and Machine Intelligence, Vol. 14, No. 9, p.p. 869-882,
1992.
[24] C. H. Wu, M. M. Hsu, Y. L. Chang, F. J. Hsieh, Vascular pathology of malignant cervical
lymphadenopaty: qualitative and quantitative assessment with Power Doppler ultrasound,
Cancer, Vol. 83, No. 6, p.p. 1189-1196, Settembre 1998.
[25] H. Pairleitner, H. Steiner, G. Hasendehr, A. Staudach, Three dimensional Power Doppler
sonography: imaging and quantifying blood flow and vascularization, Ultrasound Obstet.
Gynecol., Vol. 14, No. 2, p.p. 139-143, Agosto 1999.
[26] N.J. Raine-Fenning, B. K. Campbell, J. S. Clewes, N. R. Kendall, I. R. Johnson, The
interobserver reliability of three-dimensional Power Doppler data acquisition within the
female pelvis, Ultrasound Obstet. Gynecol., Vol. 23, No. 5, p.p. 501-508, Maggio 2004.
[27] S-F. Huang, R-F. Chang, W. K. Moon, Y-H. Lee, D-R. Chen, J. S. Suri, Analysis
of tumor vascularity using three-dimensional Power Doppler ultrasound images, IEEE
Transactions on Medical Imaging, Vol. 27, No. 3, p.p. 320-330, Marzo 2008.
[28] S. E. Shelton, Y. Z. Lee, M. Lee, E. Cherin, F. Stuart Foster, S. R. Aylward, P. A. Dayton, Quantification of microvasculature tortuosity during tumor evolution using acoustic
angiography, Ultrasound in Med. and Biol., Vol. 41, No. 7, p.p. 1896-1904, Febbraio
2015.
[29] E. Bullitt, S. R. Aylward, T. Van Dyke, W. Lin, Computer-assisted measurement of
vessel shape from 3D magnetic resonance angiography of mouse brain, NIH, 43(1):29-34,
Settembre 2007.
[30] E. Bullitt, N. U. Lin, J. K. Smith, D. Zeng, E. P. Winer, L. A. Carey, W. Lin, M. G.
Ewend, Blood vessel morphological changes as visualized by MRA during treatment of
brain metastases: a feasibility study, NIH, 245(3):824-830, Dicembre 2007.
[31] E. Bullitt, N. U. Lin, M. G. Ewend, D. Zeng, E. P. Winer, L. A. Carey, J. K. Smith,
Tumor therapeutic response and vessel tortuosity: preliminary report in metastatic breast
cancer, NIH, 9:561-568, Agosto 2008.
131
[32] A. H. Parikh, J. K. Smith, M. G. Ewend, E. Bullitt, Correlation of MR perfusion imaging
and vessel tortuosity parameters in assessment of intracranial neoplasm, NIH, 3(6): 585590, Dicembre 2004.
[33] E. Bullitt, G. Gerig, S. M. Pizer, W. Lin, S. R. Aylward, Measuring tortuosity of the
intracerebral vasculature from MRA images, IEEE Transactions on Medical Imaging,
22(9):1163-1171, Settembre 2003.
[34] D. W. Siemann, The unique characteristics of tumor vasculature and preclinical evidence for its selective disruption by tumor-vascular disrupting agents, Cancer Treat. Rev.,
37(1):63-74, Febbraio 2011.
[35] R. C. Gessner, R. Kothadia, S. Feingold, P. A. Dayton, 3-D microvessel-mimicking
ultrasound phantoms produced with a scanning motion system, Ultrasound Med. Biol.,
37(5):827-833, Maggio 2011.
[36] C. Winter, T. Bergen, S. Kruger, M. Lell, Flow model with vessel tree for segmentation
and registration with Color Doppler ultrasound and CT, 32nd Int. Conf. IEEE, p.p.
2589-2593, 4 Settembre 2010.
[37] G. Ivanac, B. Brkljalic, K. Ivanac, R. Huzjan, F. Skree, I. Cikara, Vascularisation of
benign and malignant thyroid nodules: CD US evaluation, Ultraschall Med., Vol. 28(5),
p.p. 502-506, 2007.
[38] A. Lyshchik, Quantitative analysis of tumor vascularity in benign and malignant solid
thyroid nodules, J. Ultrasound Med., Vol. 26(6), p.p. 837-846, 2007.
[39] C. L. Stanfield, W. J. Germann, Principles of Human Physiology, Terza Edizione,
Pearson 2009.
[40] G. Coppini, S. Diciotti, G. Valli, Bioimmagini, Terza Edizione, Pàtron, Bologna 2012.
[41] G. Dougherty, Digital Image Processing for Medical Applications, Prima Edizione,
Cambridge University Press, 2009.
[42] M. P. J. Kuenen, M. Mischi, H. Wijkstra, Contrast-Ultrasound diffusion imaging for
localization of prostate cancer, IEEE Trans. on Medical Imaging, Vol. 30, No. 8, Agosto
2011.
[43] A. Fenster, S. Tong, H. N. Cardinal, C. Blake, D. B. Downey, Three-dimensional ultrasound imaging system for prostate cancer diagnosis and treatment, IEEE Trans. on
Instrumentation and Measurement, Vol. 47, No. 6, Dicembre 1998.
132