SERVO DRIVE AC
SERIE JUNMA
MODELLO A RIFERIMENTO A IMPULSI – MODELLO A MECHATROLINK-II
NETWORK
I
D
E
F
GB
JUNMA
JUNMA
JUNMA
JUNMA
JUNMA JUNMA
JUNMA JUNMA
Nuova concezione dei servo
JUNMA
Contenuto
Pagina 2
L'azienda YASKAWA
Il nuovo concetto di servo
JUNMA
Pagina 3
JUNMA utilizza le migliori servotecnologie
a livello mondiale per un montaggio rapido
ed efficiente. JUNMA esprime un moderno
concetto di tecnologia di servodrive, che non
ha bisogno di impostazione dei parametri
e regolazione del guadagno per ottenere un
posizionamento di elevata precisione.
funzionamento costante a elevata velocità,
modificando automaticamente la velocità
per compensare in tempo reale le variazioni
di carico. JUNMA ML-II collega facilmente
ciascun servo drive all'altro (fino a 16 assi) e
permette la messa a punto e il controllo con
l'utilizzo di un solo cavo.
Il semplice metodo Plug’n Play di JUNMA,
le semplici procedure di montaggio, e le
caratteristiche di elevata precisione offrono
un rendimento e un'efficienza di azionamento
ottimale per qualsiasi tipo di applicazione e di
settore industriale.
JUNMA occupa il 30% di spazio in meno
rispetto agli altri drive sul mercato, e riduce
considerevolmente i tempi di montaggio e
installazione.
SERVOPACK JUNMA
Montaggio rapido & Semplice
I servo YASKAWA
Pagine 4/5
Servomotori
Specifiche & Dimensioni
Pagine 6/7
Servopack
Il servo drive JUNMA MECHATROLINK-II
tipo network è in grado di mantenere un
Le proprietà pronte all'uso di JUNMA
relativamente a elevata velocità, alta coppia,
ed elevata precisione operativa sono al
vostro servizio.
Tipo Riferimento a Impulsi
Caratteristiche & Dimensioni
Caratteristiche dello JUNMA YASKAWA
Pagine 8/9
Servopack
Caratteristiche dei drive JUNMA tipo
Montaggio rapido ed efficiente
MECHATROLINK-II Tipo
Riferimento a Impulsi
– Collega e parti! Stessa concezione degli altri
Network
Caratteristiche & Dimensioni
pro­dotti JUNMA, non sono pertanto necessarie
Rendimento ottimale del servo senza impostazione
dei parametri o regolazione del guadagno
Pagine 10/11
Istruzioni per effettuare un
impostazion dei parametri e regolazione del
guadagno
Migliorate funzioni di controllo
Risoluzione: 10.000 impulsi/giro
ordine
– posizionamento di elevata precisione ed
ele­vato rendimento. Il riferimento di
Uscita di coppia alta all'elevata velocità di 4.500
posizione, il riferimento di velocità e il tempo
min ; semplice eliminazione delle vibrazioni
di accelera-zione/decelerazione possono
meccaniche per mezzo dell'interruttore rotativo
essere modificati in tempo reale durante il
-1
posizionamento.
Conforme agli standard internazionali
– funzione di posizionamento esterno mediante
segnale latch di posizione: individua la
Proprietà del MECHATROLINK-II
posizione corretta alla ricezione di un segnale
Tipo Comunicazioni
latch, e regola la quantità di movimento. Ciò
è particolarmente utile per gli impianti di
Correzione automatica della velocità in caso di
variazioni del carico
– funzione costante di correzione automatica
con reazione immediata alle variazioni di carico
– stabilità di esecuzione per applicazioni con
variazioni ad elevata frequenza della velocità e
della coppia
2
YASKAWA JUNMA
trasferimento, fasciatura e stampa
– ritorno al punto zero: il punto zero può essere
impostato individualmente per ciascuna
macchina del cliente
– altre funzioni: Interpolazione, funzione JOG,
reimpostazione allarme, e altre funzioni utili
Conforme agli standard internazionali
I servo YASKAWA
JUNMA SERVOPACK – Montaggio rapido & semplice
Impostazioni facili per una riduzione
del tempo di montaggio.
Disimballaggio
Estrarre il SERVOPACK
dalla scatola.
Installazione e cablaggio
Collegare i cavi per alimentazione,
linee di segnali e motore.
Tipo controllo a impulsi
Mechatrolink-II tipo Network
Impostazione riferimento
a impulsi
Selezionare l'interruttore del
riferimento a impulsi per il vostro
controller. Non sono
necessarie impostazioni
dei parametri e
regolazioni del
guadagno.
Impostazioni di
comunicazione
Solo per impostazioni di
comunicazione. Non sono
necessarie regolazioni
del guadagno.
YASKAWA YASKA
YASKA
WA WA
YASKAWA
Controller
Cacciavite
incluso
Completamento del
montaggio
Il motore è pronto all'esecuzione
con il riferimento dal controller.
La coppia richiesta è
possibile anche con
rotazione all'elevata
velocità di 4500 min-1.
3
Servomotori
Modalità e Caratteristiche
Tensione
200VAC
Modello Servomotore SJME-
* Questi elementi, insieme con le caratteristiche
di velocità/coppia menzionate in combinazione
con un servopack SJDE, sono alla temperatura di
avvolgimento dell'armatura di 100 °C. Gli altri sono
valori a 20 °C.
* 2 Le coppie nominali elencate sono i valori per la coppia
continua consentita a 40 °C con un dissipatore in
alluminio (250 mm × 250 mm × 6 mm) annesso.
01
02
04
08
01
02
04
08
SERVOPACK APPLICABILE
SJDE-
Uscita nominale * 1
W
100
200
400
800
Coppia nominale * 1, * 2
Nm
0,318
0,637
1,27
2,39
Coppia di picco istantanea *1
Nm
0,955
1,91
3,82
7,16
Corrente nominale * 1
A rms
0,84
1,1
2,0
3,7
Corrente max. istantanea *1
A rms
2,5
3,3
6,0
11,1
A
Velocità nominale * 1
min-1
Velocità massima * 1
min-1
Costante di coppia
Nm/A rms
Momento di inerzia del rotore
kg × m2 ×10 -4
Potenza nominale * 1
Accelerazione angolare nominale *
1
A
1
3000
4500
0,413
0,645
0,682
0,699
0,0634
0,330
0,603
1,50
kW*/s
16,0
12,3
26,7
38,1
rad/s
50200
19300
21100
15900
2
Rating di tempo
Continuo
Classe termica
B
Classe di vibrazione
15 μm o meno
Tensione di tenuta
1500 VAC per un minuto
Resistenza di isolamento
500 VDC, 10 MΩ min.
Protezione
Completamente chiuso, autoraffreddato, IP55
(tranne l'apertura dell'albero e i connettori)
Resistenza agli impatti
Accelerazione di impatto: 490 m/s2 in tre direzioni : verticale, lato-lato, e fronte-retro.
Occorrenze di impatti: 2
Resistenza a vibrazioni
Accelerazione vibrazione: 49 m/s2 in tre direzioni – verticale, lato-lato, e fronte-retro.
Caratteristiche del freno di arresto
Punto operativo
nominale
Coppia (Nm)
A. Campo operativo continuo
Campo di sicurezza che
permette il funzionamento
continuo del servomotore. La
coppia effettiva deve essere
interna a questo campo.
4
Coppia nominale
Stessa coppia
in uscita ad ogni
velocità rotatoria.
B. Campo operativo ripetitivo
Campo entro il quale
il motore può essere
azionato per un breve
periodo, a condizione
che la coppia effettiva
del motore sia interna al
campo operativo continuo.
04
08
Momento di inerzia freno d'arresto *
kg × m2 ×10 -4
0,0075
0,064
Capacità
W
6
6,9
0,171
7,7
Coppia d'arresto minima (Coppia frizione statica)
Nm
0,318
1,27
2,39
Resistenza bobina
Ω (at 20 °C)
96
83
75
Corrente nominale
A (at 20 °C)
0,25
0,29
0,32
Tempo di rilascio freno
ms
80 max.
Tempo di salita per coppia frenante
ms
100 max.
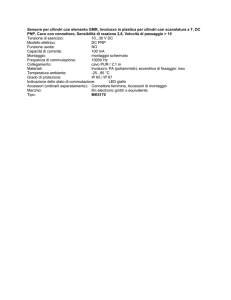
Caratteristiche Velocità/Coppia
Velocità (min-1)
Velocità (min-1)
La coppia in uscita
diminuisce se la
velocità supera la
velocità nominale.
02
24 VDC ± 10%
Velocità (min-1)
Come leggere un grafico delle
caratteristiche di velocità e coppia
01
A
Tensione nominale
Velocità (min-1)
Note:
1 Il freno di arresto è utilizzato solo per arrestare il
carico, e non può essere utilizzato per arrestare il
servomotore.
2 Non azionare il freno di arresto quando il servo è
acceso.
La non osservanza di questa avvertenza può portare
a un sovraccarico del SERVOPACK o a una riduzione
della durata del freno.
Modello servomotore SJME-
Velocità (min-1)
* Per ottenere il momento di inerzia con frenatura del
motore, sommare il momento di inerzia del freno
di arresto al momento di inerzia del rotore. Il valore
della potenza nominale e l'accelerazione angolare
del motore varieranno in base al momento di inerzia
del motore.
Coppia (Nm)
Coppia (Nm)
Coppia (Nm)
Nota: Le linee continue indicano le caratteristiche coppia/velocità del servomotore a 200 VAC, le linee tratteggiate indicano quelle a 230 VAC.
YASKAWA JUNMA
Coppia (Nm)
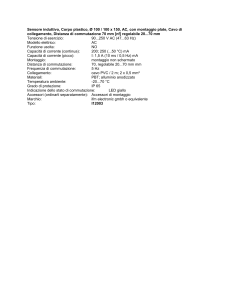
Dimensioni
Unità di misura: mm
100 W
Motor Connector Specifications
Motor Connector
Specificationsdel motore
Specifi
che del
connettore
Extension:
BKUA854NN0085155A000
Cavo dell'encoder
Motor Connector Specifications
Extension: BKUA854NN0085155A000
Male Contact
(Crimp): 61.006.11
Senza freno
Con freno
Extension:1 BKUA854NN0085155A000
Male Contact
(Crimp): 61.006.11
1
5
Male
Contact
(Crimp):
61.006.11
1
(INTERCONTEC)
5
Pin Descrizione Colore
Descrizione Colore
5
(INTERCONTEC)
(INTERCONTEC)
Connettore dell'encoder
Connettore del motore
Cavo del circuito principale
del Servomotore
1 Fase
U
Rosso
Fase U
Rosso
Plug:
BSTA852NN0085201A000
Motor Connector42Specifications2
4
4 6 Plug: BSTA852NN0085201A000
Plug:
BSTA852NN0085201A000
3 2
2
Fase
V
Bianco
Fase
V
Bianco
6
3
Extension:
BKUA854NN0085155A000
Female
6 Female
3 Contact
(Crimp): Contact
60.001.11 (Crimp): 60.001.11
Contact
(Crimp):
60.001.11
Male Contact (Crimp):Female
61.006.11
1
3
Fase
W
Blu
Fase
W
Blu
(Solder): 60.004.11 (Solder): 60.004.11
5
(INTERCONTEC)
(Solder): 60.004.11
Sezione trasversale A-A
4
6
3
Phase U
Phase V
Phase W
FG
L
LL
Massa appross. (kg)
119
94
0.5
01AMA4C
164
139
0.8
Rosso
–
Freno
Nero
Male Contact (Crimp): 61.004.11
Specifiche del connettore dell'encoder
8
da 200 W a 750 W
Connettore dell'encoder
Cavo del circuito principale
del servomotore
Verde/giallo
Freno
Phase V White
White
Prolunga: BKUA854NN0085155A000
Phase U Red
Red
W Blue
BluePhase U Phase
Contatto maschio
(a crimpare): 61.006.11 (INTERCONTEC)
Phase
Phase
Green/Yellow
Green/Yellow
PhaseUV Red
PhaseUV FGRed
White Spina:
White
BSTA852NN0085201A000
Phase
V
Phase
White
White
Brake
Red
Phase
Phase(aVW
Blue Contatto femmina:
Blue60.001.11
PhaseW
U Red
crimpare):
Phase W Brake
Phase W Blue
Blue Black
10
11
6
Black
PG0 V(GND)
11
Phase A+ 6 5 Blue
4
Blue
/
White
Phase
A4
5
Red
PG5 V
Black PG0 V(GND)
B+Blue Yellow
Phase Phase
A+
Yellow / White
B-Blue / White
Phase Phase
APurpleV
Phase /Z PG5
Phase Phase
B+
GrayV
U YellowPG5
White V(GND)
Phase Phase
BGreen
V Yellow /PG0
V(GND)
Phase Phase
/Z
Phase
A+
Orange
W PurplePG0
Gray Phase
Phase -U
PhaseA+
AGreen
Phase
V
Shield Wire
Case Frame Ground Phase
A-
Cavo dell'encoder
FG
–
2 Specifications
(INTERCONTEC)
12 Connector
Encoder
Connector Specifications
Encoder
3
7
Encoder
Connector
Specifications
Extension:
AKUA047NN0084151A000
Plug:
ASTA046NN0084200A000
1
11
9
6
Extension: AKUA047NN0084151A000
1
Male
Contact (Crimp):
61.004.11
Pin 60.001.11
Descrizione
Colore
(Crimp):
8
10
Extension:
AKUA047NN0084151A000
4 9 Female Contact
5
Male Contact
(Crimp): 61.004.11
110
2
(INTERCONTEC)
12
89
(Solder):
60.004.11
1 Contact
PG5 V(Crimp):Rosso
Male
61.004.11
3
7
8
10
2
(INTERCONTEC)
12
Plug: ASTA046NN0084200A000
11
6
2
PG0 V (GND)
Nero
(INTERCONTEC)
12
Female
Contact 2(Crimp):
60.001.11
3
7
4
5
Red
PG5 V
3 ASTA046NN0084200A000
Fase A+
Blu
Plug:
3
7
(Solder):
60.004.11
Nota: Solo per servomotori con freni
Coppia freno d'arresto = Coppia nominale del motore
01AMA41
Verde/giallo
Phase U Red
Phase V White
Phase V White
FG
Green/Yellow FG (Saldatura):
Green/Yellow
60.004.11
Phase W Blue
Blue
FGPhase W Green/Yellow
FG
Green/Yellow
Brake
Red
FG
Green/Yellow
Green/Yellow
Encoder
ConnectorFG
Specifications
Brake
Red
Brake
Brake
Black
Red
Extension:
AKUA047NN0084151A000
Brake
Black
Brake
Black
1
9
Freno d'arresto (operazione di diseccitazione)
Alimentazione: 24 VDC
Tipo SJME-
FG
Plug: BSTA852NN0085201A000
5
–
Female Contact (Crimp): 60.001.11
6 60.004.11
–
(Solder):
Phase U Red
Red
2
4
Connettore del motore
Plug:
4 ASTA046NN0084200A000
Fase A – (Crimp):
Blu/Bianco
Female
Contact
60.001.11
Female
Contact
(Crimp):
60.001.11
5
–
–
(Solder):
60.004.11
6
Fase B+ (Solder):
Giallo 60.004.11
7
Fase B –
Giallo/Bianco
Red8
Fase / Z
Porpora
Red
Black
9
Fase U
Grigio
Black
Blue
10
Fase V
Verde
Blue
Blue
/ White
Arancio
Blue
Orange Phase W
- 11/ WhiteFase W
-Yellow
-Phase B+
12
–
–
Case Frame Ground Shield Wire
Yellow
Phase
Yellow
/ White
PhaseB+
BCustodia
Massa telaio
Cavo schermato
Yellow
/ White
Phase
Purple
PhaseB/Z
Prolunga: AKUA047NN0084151A000
Purple
Phase
/Z
Gray
Phase U
Contatto maschio (a crimpare): 61.004.11 (INTERCONTEC)
Gray
Phase
Green
PhaseUV
Spina: ASTA046NN0084200A000
Green
Phase
V
Orange
Phase W
Contatto femmina: (a crimpare): 60.001.11
Orange
Phase
W
(Saldatura): 60.004.11
Case Frame Ground Shield Wire
Case Frame Ground Shield Wire
Sezione trasversale A-A
Freno d'arresto (operazione di diseccitazione)
Alimentazione: 24 VDC
Nota: Solo per servomotori con freni
Coppia freno d'arresto = Coppia nominale del motore
Tipo SJME-
L
LL
02AMA41
125,5
95,5
02AMA4C
165,5
135,5
04AMA41
148,5
118,5
04AMA4C
188,5
158,5
08AMA41
173
133
08AMA4C
216
176
LR
LG
LE
30
6
3
S
14
0
-0,011
LB
50
0
-0,039
LC
LD
LF
–
–
60
40
8
3
16
70
0
-0,046
80
35
LZ
QK
5,5
20
–
20
Massa appross. (kg)
0,9
70
–
0
-0,011
LA
1,5
1,3
1,9
90
7
30
2,6
3,5
5
SERVOPACK – Tipo Riferimento a Impulsi
Modalità e Specifiche
01APA
02APA
03APA
04APA
Capacità max. applicabile del servomotore
kW
0,1
0,2
0,4
0,75
Corrente di uscita continua
A rms
0,84
1,1
2,0
3,7
A rms
2,5
3,3
6,0
11,1
Modello SERVOPACK SJDE-
Corrente istantanea max. in uscita
Corrente di ingresso
(per circuito principale e
circuito di controllo)
Tensione
Monofase da 200 a 230 VAC, da +10 a −15%
Frequenza
50/60 Hz ± 5%
Capacità tensione di frequenza alla
potenza in uscita
Caduta di tensione alla potenza in uscita
kVA
0,40
0,75
1,2
2,2
14
16
24
35
W
Tipo ingresso-condensatore, rettifica onda intera monofase con resistenza per prevenire
picchi di corrente
Metodo di controllo ingresso
Metodo di controllo uscita
Controllo PWM , sistema alimentato da corrente a onda sinusoidale
Feedback
Encoder a uscita analogica
Inerzia di carico consentita* 1
Funzioni integrate
Segnali I/O
Segnale di ingresso per
riferimento
(tipo di impulso
specificato e risoluzione
impulsi con selettore
PULSE )
kgm2
0,6 ×10 -4
3 ×10 -4
5 ×10 -4
Tipo impulsi
Selezionare uno dei seguenti segnali:
1. CCW + CW
2. Direzione + treno impulsi
3. CCW + CW (inversione logica)
4. Direzione + treno impulsi (inversione logica)
Risoluzione impulsi
Selezionare uno dei seguenti segnali:
1. 1000 impulsi/giro (collettore aperto/line driver) 75 kpps max.
2. 2500 impulsi/giro (collettore aperto/line driver) 187,5 kpps max.
3. 5000 impulsi/giro (line driver) 375 kpps max.
4. 10000 impulsi/giro (line driver) 750 kpps max.
Segnale di ingresso Clear
Cancella l'errore di posizionamento quando attivato
Segnale di ingresso servo ON
Accende o spegne il servomotore
Segnale di uscita allarme
OFF in caso di allarme
Segnale di uscita freno
Segnale esterno per controllo freni
Accendere per rilasciare il freno
Segnale di uscita posizionamento completo
ON se la posizione corrente è uguale alla posizione di riferimento ± 10 impulsi
Segnale di uscita origine
ON se il motore si trova nella posizione di origine (ampiezza: 1/500 giri)
Freno dinamico (DB)
Attivo quando l'alimentazione principale è OFF, servo allarme, servo OFF
(OFF dopo l'arresto del motore; ON se l'alimentazione del motore è off)
Processo rigenerativo
Opzionale (se l'energia rigenerativa è eccessiva,
installare una unità rigenerativa)
Protezione* 2
Errori di velocità, sovraccarico, errori encoder, errori di tensione, sovraccorrente,
disattivazione della ventola di raffreddamento integrata, errori di sistema
Display
Cinque indicatori LED (PWR, REF, AL1, AL2, AL3)
Filtro di riferimento
Selezionare uno degli otto livelli mediante il selezionatore FIL
Metodo di raffreddamento
Raffreddamento forzato (ventola integrata)
Temperatura operativa
Da 0 °C a +55 °C
Umidità operativa
90% RH o meno (senza condensa)
Temperatura di stoccaggio
Da –20 °C a +70 °C
* 1 Assicurarsi di utilizzare il motore nell'ambito del
momento di inerzia del carico consentito. Se il
momento di inerzia del carico supera il valore
consentito il motore diventa instabile.
Umidità di stoccaggio
90% RH o meno (senza condensa)
Sito di installazione
Privo di gas corrosivi
Privo di polvere e polvere di ferro
Pulito e asciutto
* 2 Il circuito di protezione di messa a terra è progettato
per guasti a terra all'interno degli avvolgimenti del
motore con il motore in funzione. Potrebbe, pertanto,
non proteggere il sistema nei seguenti casi:
• Si verifica un guasto a terra di bassa resistenza nel
cavo del circuito principale o nel connettore del cavo
per il servomotore.
• Viene accesa l'alimentazione durante un guasto
a terra.
Altitudine
1000 m o al di sotto
Resistenza a vibrazioni
4,9 m/s2
Resistenza agli urti
19,6 m/s2
Condizioni operative
Categoria di installazione (categoria di sovratensione): II
Grado di inquinamento: 2
Classe di protezione: IP1X (EN50178)
6
10 ×10 -4
YASKAWA JUNMA
Dimensioni
Unità di misura: mm
SJDE-01, 02 (100W, 200W)
Schema Foro di Montaggio
Fori 4,5 dia.
Fori di montaggio 2-M4
(Passo di montaggio)
Flusso aria
Ventola di
raffreddamento
Targhetta
Flusso aria
Terminale di messa
a terra con viti 2xM4
SJDE-04 (400W)
Schema Foro di Montaggio
Fori 4,5 dia.
Fori di montaggio 2-M4
Profilo visibile
(Passo di montaggio)
Flusso aria
Ventola di
raffreddamento
Targhetta
Flusso aria
Terminale di messa
a terra con viti 2xM4
SJDE-08 (800W)
Schema Foro di Montaggio
Fori di montaggio 2-M4
Fori 4,5 dia.
Profilo visibile
Ventola di
raffreddamento
Targhetta
(Passo di montaggio)
Flusso aria
Flusso aria
Terminale di messa
a terra con viti 2xM4
7
SERVOPACK – MECHATROLINK-II Tipo Network
Modalità e specifiche
01ANA
02ANA
03ANA
04ANA
Capacità applicabile del servomotore
kW
0,1
0,2
0,4
0,75
Corrente di uscita continua
A rms
0,84
1,1
2
3,7
Corrente istantanea max. in uscita
A rms
2,5
3,3
6
11,1
Caratteristiche di base
Modello SERVOPACK SJDE-
Corrente di ingresso
(per circuito
principale e circuito
di controllo)
Tensione
Monofase da 200 a 230 VAC, +10 to −15%
Frequenza
50/60 Hz ± 5%
Capacità tensione di frequenza
alla potenza in uscita
kVA
Caduta di tensione alla potenza in uscita
W
Metodo di controllo ingresso
0,40
0,75
1,2
2,2
14
16
24
35
Tipo ingresso condensatore, rettifica onda intera monofase con resistenza per prevenire picchi di corrente
Metodo di controllo uscita
Momento di inerzia del carico consentito* 1
Controllo PWM , sistema alimentato da corrente a onda sinusoidale
kgm2
0,5 ×10 -4
3 ×10 -4
Funzioni integrate
Corrente di fuga
Freno dinamico (DB)
Attivo quando l'alimentazione è OFF, un servo è OFF, o in caso di allarme
(Rilasciato dopo l'arresto del motore, applicato se l'alimentazione è disattivata)
Comunicazioni per manutenzione
JUNMAWin (Modifiche/inizializzazione dei parametri, operazione JOG, ecc.)
Processo rigenerativo
Se l'energia rigenerativa è eccessiva, installare una unità rigenerativa
Arresto di emergenza
Arresto di emergenza (E-STP)
Prevenzione overtravel (OT)
Corsa in avanti non consentita (P-OT), corsa indietro non consentita (N-OT)
Display
Quattro spie LED (PWR, RDY, COM, ALM)
Monitor
Monitor stato alimentazione, monitor servo ON/OFF, monitor MECHATROLINK
Feedback
Encoder incrementale (8192 impulsi/giro)
Impost. risoluzione di riferimento (alimentatore elettronico)
0,01 ≤ B/A ≤ 100
Protezione
Errore di velocità, sovraccarico, errore dell'encoder, errore di tensione, sovraccorrente,
arresto del ventilatore integrato, errore di sistema, guasto di messa a terra* 2
Comunicazioni
MECHATROLINK
* Assicurarsi di utilizzare il motore nell'ambito del
momento di inerzia del carico consentito. Se il
momento di inerzia del carico supera il valore
consentito il motore diventa instabile.
Protocollo di comunicazione
MECHATROLINK-II
Indirizzo stazione
da 41H a 5FH
Velocità di trasmissione
10 Mbps
Ciclo di trasmissione
1 ms, 1,5 ms, 2 ms, 3 ms, 4 ms
Lunghezza dati
17 byte o 32 byte
8
10 ×10 -4
Comunicazioni MECHATROLINK-II
Metodo di comando
Rendimento
Segnali ingresso sequenza
Ingressi fissi
5 punti (segnale latch esterno, segnale decelerazione homing, segnale di corsa in avanti non consentita,
segnale di corsa indietro non consentita, e segnale arresto di emergenza)
Segnali uscita sequenza
Uscite fisse
2 punti (servo allarme e freno di arresto)
1
* 2 Il circuito di protezione di messa a terra è progettato
per guasti a terra all'interno degli avvolgimenti del
motore con il motore in funzione. Potrebbe, pertanto,
non proteggere il sistema nei seguenti casi:
• Si verifica un guasto a terra di bassa resistenza nel
cavo del circuito principale o nel connettore del cavo
per il servomotore.
• Viene accesa l'alimentazione durante un guasto
a terra.
5 ×10 -4
3,5 mA max.
Comandi MECHATROLINK-II (per movimento, impostazione/riferimento dati, monitor, correzione, e altri comandi)
Temperatura/ umidità operativa
da 0°C a +55°C /90% RH o meno (senza condensa)
Temperatura/ umidità di stoccaggio
da –20°C a +70°C /90% RH o meno (senza condensa)
Condizioni ambientali
Privo di gas corrosivi, privo di polvere e di polvere di ferro, privo di goccioline di acqua o olio di macchina
Altitudine
1000 m o meno
Resistenza a vibrazioni/ scosse
4,9 m/s2 /19,6 m/s2
Condizioni operative
Categoria di installazione (categoria di sovratensione) II, grado di inquinamento: 2, classe di protezioneIP1X EN50178)
YASKAWA JUNMA
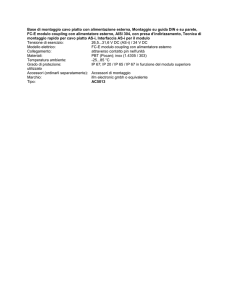
Dimensioni
Unità di misura: mm
SJDE-01, 02 (100W, 200W)
Schema Foro di montaggio
(Passo di montaggio)
Fori di montaggio 2-M4
Terminale di messa
a terra con viti 2xM4
Profilo visibile
Targhetta
(Passo di montaggio)
SJDE-04 (400W)
Schema Foro di Montaggio
( 6)
Fori di montaggio 2-M4
(Passo di montaggio)
150
139.5±0.5
150
5˚
12
YASKAWA
5.5
( 16)
( 4.5)
Profilo visibile
Terminale di messa
a terra con viti 2xM4
( 5)
Targhetta
( 75)
45
( 5)
YASKAWA ELECTRIC
5
32±0.5
130
( 8)
45
(Passo di montaggio)
SJDE-08 (800W)
Schema Foro di Montaggio
( 6)
Fori di montaggio 3-M4
5.5
( 16)
( 4)
(Passo di montaggio)
150
150
139.5±0.5
5˚
12
Profilo visibile
Terminale di messa a
terra con viti 2xM4
( 5)
Targhetta
70
( 75)
Ventola di raffreddamento
180
( 5)
YASKAWA ELECTRIC
6
58±0.5
( 6)
70
(Passo di montaggio)
9
Istruzioni per effettuare un ordine
Designazione modello servomotore
SJME
- 02
A
M
C
4
1
JUNMA Servomotor
Caratteristiche freno
Caratteristica
Capacità
Potenza (W)
Codice
100
Servomotore JUNMA
3.000 g/m
(100 –750 W)
1
Freno 24 VDC
C
01
200
02
Caratteristiche estremità albero
400
04
Caratteristica
750
08
Dritto con chiavetta
Codice
Procedura progettazione
Tensione
Caratteristica
Caratteristica
Codice
200 VAC
Codice
Di serie
C
A
Caratteristiche feedback
Caratteristica
Codice
Encoder uscita analogica
M
Designazione modello SERVOPACK
SJDE
Servodrive
JUNMA
MECHATROLINK-II
200V
SJDE- 02 APA-OY
REF
PULSE
02
A
P
A
Ordine Revisione Modello
A, B …
Capacità servomotore applicabile
Uscita (W)
100
AL1
AL2
AL3
FIL
200
C
N
1
C
N
2
PWR
Caratteristiche interfaccia
Codice
01
02
400
04
750
08
Caratteristica
Codice
Controllo riferimento a impulsi
P
MECHATROLINK-II
N
Tensione di alimentazione
U
L1
V
L2
W
+
CNA
10
-
SERVOPACK JUNMA
Serie SJDE
Servodrive
JUNMA
a Impulsi
Codice
Senza freno
Caratteristiche
CNB
200 VAC
YASKAWA JUNMA
Codice
A
4
Istruzioni per effettuare un ordine
Cavi per alimentazione
Caratteristiche
Modello
1,5 m
Cavo di alimentazione per
servomotori JUNMA senza
freno
Cavo di alimentazione per
servomotori JUNMA con freno
Aspetto
JZSP-CHM000-01-5-E-G2
3m
JZSP-CHM000-03-E-G2
5m
JZSP-CHM000-05-E-G2
10 m
JZSP-CHM000-10-E-G2
15 m
JZSP-CHM000-15-E-G2
20 m
JZSP-CHM000-20-E-G2
1,5 m
JZSP-CHM030-01-5-E-G2
Cavi flessibili (di serie)
Cavo schermato
Raggio di piegatura (dinamico) > 10 x diametro
Cicli di piegatura > 5 milioni
Cavi flessibili (di serie)
Cavo schermato
Raggio di piegatura (dinamico) > 10 x diametro
Cicli di piegatura > 5 milioni
3m
JZSP-CHM030-03-E-G2
5m
JZSP-CHM030-05-E-G2
10 m
JZSP-CHM030-10-E-G2
15 m
JZSP-CHM030-15-E-G2
20 m
JZSP-CHM030-20-E-G2
Cavi per encoder
Caratteristiche
Modello
1,5 m
Cavo encoder per servomotori
JUNMA
Cavi flessibili (di serie)
Cavo schermato
Raggio di piegatura (dinamico) > 10 x diametro
Cicli di piegatura > 5 milioni
Aspetto
JZSP-CHP800-01-5-E-G2
3m
JZSP-CHP800-03-E-G2
5m
JZSP-CHP800-05-E-G2
10 m
JZSP-CHP800-10-E-G2
15 m
JZSP-CHP800-15-E-G2
20 m
JZSP-CHP800-20-E-G2
Connettori per cavi alimentazione ed encoder
Caratteristiche
Connettori per cavi di alimentazione
Connettori per cavi encoder
Lato drive (CNB)
Produttore: JST
Lato motore
Produttore: Intercontec
Lato drive (CN2)
Produttori: 3M e Molex
Lato motore
Produttore: Intercontec
Modello (YASKAWA)
Modello (Produttore)
JZSP-CHM9-2
04JFAT-SAYGF-N
BSTA852NN0085201A000 *
JZSP-CHP-2
ASTA046NN0084200A000 *
* Nota: I contatti femmina per spine Intercontec devono essere ordinati separatamente, Tipo crimpatura: 60.001.11
Tipo saldatura: 60.004.11
Cavi di segnale e comunicazione
Nome
Tipo
Modello
Cavi segnali I/O
Kit connettore di segnali I/O
Per SERVOPACK CN1
JZSP-CHI003-02
2m
JZSP-CHI003-03
3m
JEPMC-W6002-
Cavo con connettori a entrambe
le estremità* 1
(Con nucleo in ferrite)
Aspetto
–
*
–
2
JEPMC-W6002-
(senza nucleo in ferrite)
Cavo per Personal Computer
1m
Tipo saldato JZSP-CHI9-1
Cavo con connettori a entrambe
le estremità * 1
Cavo di comunicazione
MECHATROLINK-II
Lunghezza
JZSP-CHI003-01
* 2 -E
(Conforme alla Direttiva RoHS)
–
JEPMC-W6003-
–
*
2
JEPMC-W6003-
* 2 -E
(Conofrome alla Direttiva RoHS)
–
JEPMC-W6022-
–
*
2
Terminazioni
* 2 -E
(Conforma alla Direttiva RoHS)
Cavi
JZSP-CPS00-02
JEPMC-W6022-
–
2m
* 1: La lunghezza complessiva del cavo deve essere di 50 m max. e quella tra le stazioni deve essere di 0,5 m min.
* 2: Quando si effettua un ordine specificare la lunghezza del cavo in
, come indicato nella tabella sottostante.
Lunghezza cavo m
Lunghezza cavo m
Lunghezza cavo m
Lunghezza cavo m
Lunghezza cavo m
A5
0,5
03
3,0
07
7,0
20
20
40
40
01
1,0
05
5,0
10
10
30
30
50
50
11
YASKAWA Electric Europe GmbH
Hauptstr. 185
65760 Eschborn
Deutschland / Germania
+49 6196 569-300
[email protected]
www.yaskawa.eu.com
Le specifiche sono soggette a cambiamento senza preavviso
per via di continue modifiche e miglioramenti ai prodotti.
© YASKAWA Electric Europe GmbH. Tutti i diritti riservati.
Literature No. YEG_MuC_JUNMA_I_v1_1108
Stampata in Germania Novembre 2008