VF–CE Compatti
Inverter Vettoriali
Manuale Operativo
VF–CE Compatti
Manuale Operativo
Matsushita Electric Works Italia
ACGM0180V1.1ITD 07/2002
è il marchio mondiale dei prodotti per l’automazione Matsushita
Copyright
Questo manuale e tutto il suo contenuto sono protetti da diritto d’autore. Non è possibile
pertanto effettuarne riproduzioni complete o parziali senza il consenso scritto di
Matsushita Electric Works.
Marchio
Targa d’identificazione
I convertitori di frequenza di Matsushita Electric Works si contraddistinguono dal
marchio.
Marchio CE
Conforme alla direttiva CE bassa tensione.
Utilizzo
I convertitori di frequenza VF–CE ed i loro accessori:
•
•
funzionano solo nelle condizioni descritte in queste istruzioni operative
sono componenti
– per il controllo anello aperto e chiuso di drive a velocità variabile con
motori standard asincroni, motori a riluttanza e motori sincroni con
smorzatore
– per l’installazione in macchinari
– utilizzati unitamente ad altri componenti per creare un macchinario
•
•
•
conformi alla direttiva CE bassa tensione
non conformi alla direttiva macchine CE
per usi industriali
Drive con convertitori di frequenza VF–CE:
•
•
se installati secondo le regole dei sistemi con drive marchiato CE sono
conformi alla direttiva CE di compatibilità elettromagnetica
possono funzionare
– con sistemi di alimentazione sia pubblici che non
– in edifici industriali e residenziali.
•
L’utente deve assicurarsi di operare secondo le direttive CE.
Qualsiasi altro uso è da ritenersi inopportuno!
Matsushita Electric Works Italia
a
Responsabilità
•
•
•
•
Matsushita Electric Works segue una politica di miglioramento continuo
del design e delle prestazioni dei suoi prodotti. Pertanto si riserva il diritto
di modificare manuale e prodotto senza preavviso. In ogni caso
Matsushita non è responsabile di eventuali danni derivanti da difetti del
prodotto o da errate indicazioni sul manuale.
Le informazioni, i dati e le note contenuti in questo manuale sono
aggiornati al momento della stampa. Pertanto verrà respinto qualsiasi
reclamo relativo a prodotti forniti in passato che si basi su informazioni,
illustrazioni e descrizioni contenute nel presente manuale.
Le specifiche, gli esempi applicativi e i circuiti descritti in questo manuale
servono da esempio e devono essere adattati dal cliente alla propria
specifica applicazione. Matsushita non si assume la responsibilità
sull’idoneità degli esempi e dei circuiti suggeriti.
Matsushita non accetta nessuna responsabilità per danni e inconvenienti
operativi causati da:
– errata interpretazione delle istruzioni di funzionamento
– modifiche non autorizzate al prodotto
– errori di funzionamento.
Limiti di garanzia
Tutte le forme di garanzia sono limitate ad un anno dalla data di acquisto.
In caso di difetti, Matsushita Electric Works provvederà a sostituire o riparare il prodotto
a proprie spese. Sono comunque esclusi dalla garanzia danni dovuti a:
w utilizzo o trattamento del prodotto diverso da quanto indicato nel
presente manuale
w apparecchiature difettose diverse dal prodotto venduto
w modifiche o riparazioni non effettuate dal personale tecnico di Matsushita
w disastri naturali.
Materiale
Materiale
Metallo
Plastica
Elettronica interna
originario
–
–
•
riciclato
•
•
–
MS–DOS e Windows sono marchi registrati di Microsoft Corporation.
IBM Personal Computer AT è un marchio registato di International Business Machines Corporation.
b
Matsushita Electric Works Italia
AVVERTENZE PER LA SICUREZZA
Avvertenze di sicurezza per l’utilizzo di convertitori di frequenza
(secondo Direttive Bassa Tensione 73/23/EC)
Indicazioni generali
I convertitori di frequenza, a seconda del loro grado di protezione,
possono avere durante il funzionamento parti sotto tensione non
isolate, parti mobili o rotanti e superfici con temperature elevate.
Nei casi di rimozione non ammessa di parti dell’involucro o di
utilizzo non corretto e/o installazione impropri sussiste grave
pericolo per persone o cose.
Per ulteriori informazioni far riferimento alle rispettive sezioni nel
manuale.
Tutte le operazioni relative a trasporto, installazione, attivazione e
manutenzione devono essere eseguiti da personale qualificato ed
autorizzato (osservare le norme IEC 364 o CENELEC HD 384 o
DIN VDE 0100 e IEC 664 o DIN/VDE 0110 e le norme
antiinfortunistiche nazionali!).
Negli avvisi di sicurezza, come personale qualificato si intendono
tecnici specializzati all’installazione, il montaggio, la messa in
funzione ed il funzionamento dell’apparecchio con specifiche
conoscenze e qualifiche.
Uso appropriato
I convertitori di frequenza sono componenti destinati ad essere
incorporati in impianti o macchine.
Se il convertitore viene integrato in una macchinario, questo non
potrà essere messo in servizio affinchè il macchinario stesso non
risponderà ai requisiti della Direttiva 89/392/EEC ( MSD). La
norma EN 60204 va rispettata.
La messa in servizio è concessa solo se la Direttiva EMC
(89/336/EEC) viene rispettata.
I convertitori di frequenza sono conformi alle esigenze della
Direttiva Bassa Tensione 73/23/EEC. Per i convertitori di
frequenza vengono applicate le norme EN 50178/DIN VDE 0160
in combinazione con EN 60439–1/ VDE 0660, part 500, e EN
60146/ VDE 0558.
Dati tecnici ed indicazioni per l’allacciamento sono riportati sia
sulla targa d’identificazione che nella documentazione tecnica e
devono essere rispettati in ogni caso.
Trasporto, magazzinaggio
Le indicazioni per il trasporto, il magazzinaggio e l’utilizzo
appropriato devono essere osservate scrupolosamente. Le
condizioni ambientali devono essere conformi a EN 50178.
Matsushita Electric Works Italia
c
Installazione
Per il montaggio ed il raffreddamento degli apparecchi devono
essere rispettate le prescrizioni contenute nella documentazione.
I convertitori di frequenza devono essere protetti da condizioni di
lavoro inammissibili. Durante il trasporto e la manipolazione si
deve fare particolare attenzione a non piegare componenti e/o a
modificare distanze d’isolamento. Evitare il contatto con
componenti elettronici o contatti elettrici.
I convertitori di frequenza contengono componenti elettronici
sensibili a scariche elettrostatiche che possono danneggiarli
facilmente se maneggiati in modo non corretto. Non danneggiare,
nè distruggere i componenti elettrici (possibili rischi per la salute).
Collegamento
Eseguendo operazioni sul convertitore sotto tensione, rispettare
le norme antiinfortunistiche nazionali vigenti (es. VBG 4).
Effettuare il collegamento elettrico secondo le norme vigenti (es.
riguardo a sezione dei cavi, fusibili, collegamento circuito di
protezione equipotenziale, dispositivi di protezione contro
sovraccorrenti). Per ulteriori informazioni vedere le sezioni relative
nel manuale.
Le indicazioni per l’installazione secondo EMC di accorgimenti
antidisturbo come schermatura, messa a terra, disposizione di filtri
e cablaggio sono contenuti nella documentazione tecnica. Queste
indicazioni devono essere sempre rispettate anche in caso di
convertitori muniti di marchio CE. L’osservanza dei limiti stabiliti
dalla normativa EMC è responsabilità del costruttore dell’impianto
o della macchina
Funzionamento
Impianti dotati di convertitori di frequenza devono essere
equipaggiati eventualmente con impianti di sorveglianza o
protezione aggiuntivi conformi alle vigenti norme di sicurezza.
Sono ammesse modifiche ai convertitori di frequenza tramite
software di gestione.
Dopo aver scollegato il convertitore dalla rete di alimentazione,
non si devono toccare subito parti sotto tensione e morsetti di
collegamento a causa di condensatori ancora carichi. A questo
proposito devono essere osservate le relative indicazioni di
avvertimento presenti sull’involucro del convertitore.
Durante il funzionamento coperchi e porte dell’involucro devono
rimanere chiusi.
Manutenzione
Le prescrizioni del costruttore devono essere rispettate.
Queste avvertenze di sicurezza devono essere conservate!
E’ importante osservare tutte le istruzioni di funzionamento e le avvertenze di
sicurezza riportate in questo manuale!
d
Matsushita Electric Works Italia
CORRENTI DI FUGA RESIDUE
Protezione di
persone
w Prima di attivare l’inverter, verificare che non ci sia
tensione tra i terminali di alimentazione, l’uscita a relè e i
piedini dell’interfaccia FIF, in quanto:
– dopo aver tolto l’alimentazione principale, i terminali di
alimentazione U, V, W, BR1, BR2 e i piedini dell’interfaccia
FIF rimangono attivi per almeno 3 minuti;
– a motore arrestato , i terminali di alimentazione L1, L2, L3;
U, V, W, BR1, BR2 e i piedini dell’interfaccia FIF
potrebbero rimanere attivi;
– le uscite a relè K11, K12, K14 rimangono attive quando
l’inverter viene scollegato dalla rete di alimentazione.
w Prestare attenzione alla funzione “Scelta della direzione
di rotazione” tramite segnale digitale DCTRL1–CW/CCW
(C0007 = –0– ... –13–).
w Utilizzando la funzione ”Circuito di ripresa al volo”
(C0142 = –2–, –3–) per macchine con un basso momento
di inerzia e una frizione minima, è possibile che, in breve
tempo, dopo aver abilitato l’inverter il motore si avvii o
inverta la direzione di rotazione.
w Il dispositivo di dissipazione del calore dell’inverter si
attiva quando la temperatura supera i 605C. Il diretto
contatto con la pelle può causare ustioni.
Matsushita Electric Works Italia
e
Protezione
dell’inverter
w Collegare o scollegare i vari connettori soltanto in
assenza di tensione di alimentazione!
w Spegnere e riaccendere il dispositivo in modo ciclico
può determinare il superamento del limite della corrente
di ingresso ai terminali L1, L2, L3. Aspettare almeno 3
minuti tra spegnimento e riaccensione.
w Le impostazioni dell’inverter possono determinare
surriscaldamento del motore collegato (es. frenature in
DC, funzionamento prolungato a bassa velocità di motori
auto–ventilati).
Velocità eccessive
w Il drive può raggiungere velocità eccessive e pericolose
(es. impostazione di frequenze di campo troppo elevate).
L’inverter non è dotato di protezioni contro queste
eventualità. Utilizzare pertanto dispositivi di protezione
aggiuntivi.
f
Matsushita Electric Works Italia
Simboli importanti
In questo manuale ricorrono i seguenti simboli:
Il simbolo del triangolo viene utilizzato per avvisare di
informazioni di sicurezza particolarmente importanti. La
mancata osservanza potrebbe determinare:
w danni a persone e/o
• danni rilevanti ad apparecchi o al loro contenuto,
ad esempio dati.
!
NOTA
Contiene importanti informazioni aggiuntive o avverte di agire
con particolare cautela.
ESEMPIO
Contiene un esempio esplicativo della sezione di testo
precedente.
continua
Indica che il testo prosegue alla pagina successiva.
Matsushita Electric Works Italia
g
h
Matsushita Electric Works Italia
Prefazione
Convertitori di frequenza serie VF–CE
La funzione principale degli inverter VF–CE è di regolare la velocità di motori AC trifase.
Varie possibilità di combinazione tra convertitori di frequenza e specifici moduli
applicativi, che possono essere utilizzati su due interfacce allo stesso tempo,
garantiscono un’elevata flessibilità nelle funzioni di comando.
Altre caratteristiche, quali design compatto ed elevata funzionalità, fanno degli inverter
VF–CE la soluzione ideale in quasi tutte le applicazioni, ad esempio nell’impiantistica
civile, nella lavorazione di materiali o nei sistemi d’automazione.
Riguardo queste Istruzioni di Funzionamento
Queste Istruzioni di Funzionamento sono destinati a tecnici addetti a montaggio,
impostazione d’avviamento e regolazione dei convertitori VF–CE.
Ogni capitolo affronta un argomento in modo esauriente. E’ quindi sufficiente
consultare il capitolo relativo alle informazioni desiderate. L’indice permette di trovare
rapidamente informazioni su una parola chiave speciale.
Queste istruzioni integrano le Istruzioni di Montaggio fornite con l’inverter VF–CE. Tutte
le caratteristiche e le funzioni sono descritte dettagliatamente. L’impostazione dei
parametri per le applicazioni tipiche è illustrata tramite esempi.
Le Istruzioni di Funzionamento non contengono informazioni relativamente all’utilizzo
in combinazione con motori. I dati tecnici più importanti possono essere ricavati dalla
targhetta riportata sul motore stesso. Se necessario, rivolgersi al proprio fornitore per
le corrispondenti Istruzioni di Funzionamento.
Terminologia
Termine
Utilizzato nel testo per
VF–CE
Drive
AIF
FIF
Cxxxx/y
Xk/y
Convertitore di frequenza VF–CE
Inverter in combinazione con motori trifase AC o altri componenti di drive.
AutomationInterFace: Interfaccia per modulo di comunicazione.
FunctionInterFace: Interfaccia per modulo funzione.
Sottocodice y del codice Cxxxx (es. C0517/3 = sottocodice 3 del codice C0517)
Terminale y su morsetto Xk (es. X3/28 = terminale 28 su morsetto X3)
Matsushita Electric Works Italia
Prefazione – 1
Prefazione – 2
Matsushita Electric Works Italia
Elenco dei contenuti
Prefazione
Capitolo 1
Dati tecnici
1.1
Dati generali / Condizioni di utilizzo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 – 3
1.2
Dati nominali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1
Funzionamento normale e con 150 % di sovraccarico . . . . . . . . .
1.2.2
Funzionamento con 120% di sovraccarico . . . . . . . . . . . . . . . . . . .
1.2.3
Funzionamento a bassa tensione dell’inverter VF–CE 230 V . . .
1.3
Sezione fusibili e cavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 – 10
Capitolo 2
1
1
1
1
–
–
–
–
5
5
7
9
Installazione
2.1
Avvertenze importanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1
Protezione delle persone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1.1
Protezione tramite RCCB . . . . . . . . . . . . . . . . . . . . . . .
2.1.1.2
Altre misure di protezione . . . . . . . . . . . . . . . . . . . . . . .
2.1.2
Protezione del motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.3
Tipi / Caratteristiche del circuito principale . . . . . . . . . . . . . . . . . . .
2.1.4
Interazione con dispositivi di compensazione . . . . . . . . . . . . . . . .
2.1.5
Specifiche dei cavi utilizzati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2
Installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 7
2.2.1
Installazione standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 8
2.2.2
Installazione su supporto mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 9
2.3
Collegamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1
Cablaggio dei connettori a innesto . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2
Collegamento dell’alimentazione . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2.1
Collegamento dell’inverter a reti di alimentazione
a 240 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2.2
Collegamento dell’inverter a reti di alimentazione
a 400 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2.3
Collegamento motore / Resistenza di frenatura
esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3
Installazione conforme ai requisiti EMC . . . . . . . . . . . . . . . . . . . .
2.3.4
Collegamenti di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.4.1
Descrizione terminali per I/U standard . . . . . . . . . . .
2.3.5
Collegamento uscita a relè . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Matsushita Electric Works Italia
2–
2–
2–
2–
2–
2–
2–
2–
3
3
3
4
5
5
5
6
2 – 10
2 – 10
2 – 11
2 – 11
2 – 12
2
2
2
2
2
–
–
–
–
–
12
13
14
14
16
i
Indice dei contenuti
Capitolo 3
3.1
3.2
3.3
4.3
ii
3
3
3
3
3
–
–
–
–
–
3
4
6
7
9
Impostazione parametri
Indicazioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 – 3
Impostazione parametri con moduli comunicazione . . . . . . . . . . . . . . . . . . . 4 – 4
4.2.1
Impostazione parametri tramite tastiera . . . . . . . . . . . . . . . . . . . . . 4 – 4
4.2.1.1
Dati generali / Condizioni di utilizzo . . . . . . . . . . . . . . . 4 – 4
4.2.1.2
Installazione / Attivazione . . . . . . . . . . . . . . . . . . . . . . . 4 – 5
4.2.1.3
Visualizzazioni e funzioni . . . . . . . . . . . . . . . . . . . . . . . . 4 – 6
4.2.1.4
Modifica e salvataggio parametri tramite tastiera . . . 4 – 7
4.2.1.5
Variazione dei set di parametri . . . . . . . . . . . . . . . . . . . 4 – 8
4.2.1.6
Variazione delle voci nel menu utente . . . . . . . . . . . . 4 – 8
4.2.1.7
Password di protezione . . . . . . . . . . . . . . . . . . . . . . . . . 4 – 9
4.2.2
Impostazione parametri con il modulo RS232C / RS485 . . . . . . 4 – 11
4.2.2.1
Dati generali / Condizioni di utilizzo . . . . . . . . . . . . . . 4 – 11
4.2.2.2
Tempo di trasferimento . . . . . . . . . . . . . . . . . . . . . . . . 4 – 12
4.2.2.3
Collegamento ad un PC o PLC . . . . . . . . . . . . . . . . . 4 – 13
4.2.2.4
Impostazione parametri . . . . . . . . . . . . . . . . . . . . . . . . 4 – 14
4.2.2.5
Ulteriori codici per il modulo RS232C / RS485 . . . . 4 – 14
4.2.2.6
Soluzione di problemi ed eliminazione di errori . . . . 4 – 18
Impostazione parametri con modulo PROFIBUS AIF . . . . . . . . . . . . . . . . 4 – 19
Capitolo 5
5.1
Avviamento
Prima dell’accensione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1
Impostazione rapida con menu utente . . . . . . . . . . . . . . . . . . . . . .
3.1.2
Accesso a tutti i parametri del drive con menu ALL . . . . . . . . . . .
Avviamento con il modulo I/U standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Avviamento con modulo di comunicazione . . . . . . . . . . . . . . . . . . . . . . . . . .
Capitolo 4
4.1
4.2
VF–CE Compatti
Libreria funzioni
Selezione modalità di controllo – Ottimizzazione . . . . . . . . . . . . . . . . . . . . . 5 – 3
5.1.1
Modalità di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 3
5.1.2
Caratteristica V/f . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 6
5.1.2.1
Frequenza nominale V/f . . . . . . . . . . . . . . . . . . . . . . . . 5 – 6
5.1.2.2
Spunto Vmin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 7
5.1.3
Ottimizzazione del funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 9
5.1.3.1
Compensazione di scorrimento . . . . . . . . . . . . . . . . . . 5 – 9
5.1.3.2
Frequenza portante . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 10
5.1.3.3
Attenuazione dell’oscillazione . . . . . . . . . . . . . . . . . . . 5 – 11
5.1.3.4
Salti di frequenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 12
Matsushita Electric Works Italia
VF–CE Compatti
5.1.4
Indice dei contenuti
Alimentazione del circuito principale, danni al circuito,
blocco dell’inverter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 14
5.1.4.1
Condizioni di avvio / Circuito con ripresa al volo . . . 5 – 14
5.1.4.2
Blocco dell’inverter (CINH) . . . . . . . . . . . . . . . . . . . . . 5 – 16
5.2
Impostazione dei valori di limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 17
5.2.1
Campo della velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 17
5.2.2
Valori di limite della corrente (valori limite Imax) . . . . . . . . . . . . . . 5 – 18
5.3
Accelerazione, decelerazione, frenata, arresto . . . . . . . . . . . . . . . . . . . . . .
5.3.1
Tempi di accelerazione e decelerazione . . . . . . . . . . . . . . . . . . . .
5.3.2
Arrresto rapido (QSP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.3
Cambio direzione di rotazione (CW/CCW) . . . . . . . . . . . . . . . . . .
5.3.4
Frenatura con freno a iniezione DC (DCB) . . . . . . . . . . . . . . . . . .
5
5
5
5
5
–
–
–
–
–
20
20
22
22
24
5.4
Impostazione valori di riferimento aAnalogici / digitali . . . . . . . . . . . . . . . .
5.4.1
Selezione valori di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2
Valori di riferimento analogici via terminale . . . . . . . . . . . . . . . . . .
5.4.3
Valori di riferimento digitali tramite ingresso in frequenza . . . . .
5.4.4
Valori di riferimento tramite funzione “potenziometro motore” . .
5.4.5
Valori di riferimento tramite frequenze di JOG . . . . . . . . . . . . . . .
5.4.6
Valori di riferimento tramite tastiera . . . . . . . . . . . . . . . . . . . . . . . .
5.4.7
Valori di riferimento tramite sistema di bus . . . . . . . . . . . . . . . . . .
5.4.8
Commutazione manuale / remoto . . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
5
5
5
5
5
5
–
–
–
–
–
–
–
–
–
26
26
27
30
32
34
35
36
36
5.5
Inserimento / Rilevamento automatico dati motore . . . . . . . . . . . . . . . . . . 5 – 38
5.6
Controllo processo, controllo limite di corrente . . . . . . . . . . . . . . . . . . . . . .
5.6.1
Controllo PID come controllo di processo . . . . . . . . . . . . . . . . . . .
5.6.1.1
Selezione valore di riferimento per il controllo
di processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.1.2
Selezione valori effettivi per il controllo di processo
5.6.1.3
Disattivazione componente azione integrale
(PCTRL1–I–OFF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.1.4
Disattivazione del controllo di processo
(PCTRL1–OFF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.2
Controllo limite di corrente (controllo Imax ) . . . . . . . . . . . . . . . . . .
5 – 41
5 – 41
5 – 43
5 – 45
5 – 45
5 – 45
5 – 46
5.7
Collegamento di segnali analogici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 47
5.7.1
Configurazione di segnali di uscita analogici . . . . . . . . . . . . . . . . 5 – 47
5.8
Collegamento di segnali digitali, uscita messaggi . . . . . . . . . . . . . . . . . . . . 5 – 50
5.8.1
Configurazione segnali digitali in ingresso . . . . . . . . . . . . . . . . . . 5 – 49
5.8.2
Configurazione segnali digitali in uscita . . . . . . . . . . . . . . . . . . . . 5 – 50
5.9
Controllo termico del motore, rilevamento errori . . . . . . . . . . . . . . . . . . . . .
5.9.1
Controllo termico del motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.9.1.1
Controllo I2 x t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.9.1.2
Controllo motore PTC / Rilevamento inconvenienti
di terra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.9.2
Rilevamento errori (DCTRL1–TRIP–SET /
DCTRL1–TRIP–RESET) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Matsushita Electric Works Italia
5 – 53
5 – 53
5 – 53
5 – 55
5 – 56
iii
Indice dei contenuti
VF–CE Compatti
5.10 Visualizzazione dei dati operativi, diagnosi . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 57
5.10.1 Valori visualizzati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 57
5.10.2 Diagnosi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 58
5.11 Gestione set di parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 59
5.11.1 Trasferimento set di parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 59
5.11.2 Sostituzione set di parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 61
5.12 Selezione individuale parametri drive: menu utente . . . . . . . . . . . . . . . . . . 5 – 62
Capitolo 6
Soluzione dei problemi ed eliminazione
degli errori
6.1
Soluzione dei problemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 3
6.1.1
Display stato di funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 3
6.1.2
Funzionamento errato del drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 4
6.2
Analisi degli errori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 5
6.3
Messaggi di errore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 6
6.4
Reset dei messaggi di errore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 8
Capitolo 7
Automazione
7.1
Moduli di comunicazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 – 3
7.2
Funzionamento parallelo delle interfacce AIF e FIF . . . . . . . . . . . . . . . . . . . 7 – 4
Capitolo 8
Reti con puù drive
8.1
Funzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 3
8.2
Condizioni per un corretto funzionamento in rete . . . . . . . . . . . . . . . . . . . . .
8.2.1
Collegamento circuito principale . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.1.1
Protezione cavi / Sezione cavi . . . . . . . . . . . . . . . . . . .
8.2.1.2
Ferriti e filtri sull’alimentazione principale / EMC . . . .
8.2.1.3
Protezione inverter . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.2
Connessione bus DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.3
Sezioni fusibili e cavi per reti drive . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.4
Protezione per le connessioni in rete . . . . . . . . . . . . . . . . . . . . . . . .
8.3
Selezione reti di inverter / drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.1
Condizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.2
Ferriti e filtri sull’alimentazione principale . . . . . . . . . . . . . . . . . . .
8.3.3
Ingresso inverter con potenza 400 V . . . . . . . . . . . . . . . . . . . . . . .
8.3.4
Ingresso inverter con potenza 240 V . . . . . . . . . . . . . . . . . . . . . . .
iv
8
8
8
8
8
8
8
8
–
–
–
–
–
–
–
–
4
4
4
4
5
6
7
8
8 – 10
8 – 10
8 – 10
8 – 11
8 – 11
Matsushita Electric Works Italia
VF–CE Compatti
Indice dei contenuti
8.3.5
8.4
8.5
8.6
Esempi di selezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.5.1
4 drive alimentati via inverter (potenza statica) . . . .
8.3.5.2
Selezione processi dinamici . . . . . . . . . . . . . . . . . . . .
Alimentazione centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4.1
Alimentazione DC centrale ed esterna . . . . . . . . . . . . . . . . . . . . .
Alimentazione decentralizzata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.5.1
Alimentazione decentralizzata per mono e bifase . . . . . . . . . . . .
8.5.2
Alimentazione decentralizzata per trifase . . . . . . . . . . . . . . . . . . .
Funzionamento del freno in rete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.1
Possibilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.2
Selezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capitolo 9
9.1
9.2
8 – 11
8 – 11
8 – 12
8 – 15
8 – 15
8 – 16
8 – 16
8 – 17
8 – 18
8 – 18
8 – 19
Operazione di frenatura
Funzionamento del freno con resistore esterno . . . . . . . . . . . . . . . . . . . . . .
9.1.1
Modelli disponibili nella gamma Matsushita . . . . . . . . . . . . . . . . . .
9.1.2
Valori nominali del freno con transistor incorporato . . . . . . . . . . .
Resistenze di frenatura Matsushita: esempi applicativi . . . . . . . . . . . . . . . .
9
9
9
9
–
–
–
–
3
3
4
6
Capitolo 10 Accessori
10.1 Accessori / Interfacce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 – 3
10.2 Documentazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 – 4
Capitolo 11 Esempi di applicazione
11.1 Controllo velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1.1 Richieste sul sensore di velocità . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1.2 Configurazione specifica per applicazione . . . . . . . . . . . . . . . . . .
11.1.3 Regolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.2 Gruppo drive – Funzionamento con più motori . . . . . . . . . . . . . . . . . . . . . .
11.3 Controllo potenza – Limitazione coppia . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
11
11
11
11
11
–3
–3
–4
–5
–7
–8
Appendice A
A.1
Tabella codici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A – 3
Indice
Aggiornamenti
Matsushita Electric Works Italia
v
Indice dei contenuti
vi
VF–CE Compatti
Matsushita Electric Works Italia
Capitolo 1
Dati tecnici
1.1
Dati generali / Condizioni di utilizzo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 – 3
1.2
Dati nominali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 – 5
1.3
1.2.1
Funzionamento normale e con 150 % di sovraccarico . . . . . . . . . . 1 – 5
1.2.2
Funzionamento con 120 % di sovraccarico . . . . . . . . . . . . . . . . . . . . 1 – 7
1.2.3
Funzionamento a bassa tensione dell’inverter VF–CE 230 V . . . . 1 – 9
Sezioni fusibili e cavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 – 10
Dati tecnici
1–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Dati tecnici
1.1
1.1
Dati generali
Dati generali / Condizioni di utilizzo
Omologazioni e condizioni di utilizzo
Conformità
Omologazioni
Resistenza alle vibrazioni
Condizioni ambientali
Classe di inquinamento
Imballaggio (DIN 4180)
Campo di temperatura
ammesso
Altitudine di installazione h
consentita
Riduzioni di potenza
CE
Direttiva bassa tensione (73/23/EEC)
UL 508
Industrial Control Equipment (in approvazione)
UL 508C
Power Conversion Equipment (in approvazione)
Resistente ad accelerazioni fino a 0.7 g (condizioni generali Lloyd tedesco)
Da classe 3K3 a EN 50178 (senza condensa, umidità relativa media 85 %)
VDE 0110 parte 2 classe di inquinamento 2
Imballo antipolvere
Trasporto
–25 °C…+70 °C
Magazzinaggio
–25 °C…+60 °C
Funzionamento
–10 °C…+40 °C senza riduzioni di potenza
+40 °C…+55 °C con riduzioni di potenza
h ≤ 1000 m s.l.m.
senza riduzioni di potenza
1000 m s.l.m. < h ≤ 4000 m s.l.m.
con riduzioni di potenza
Riduzioni legate alla frequenza vedi pagina 1 – 5 (valori nominali)
portante
+40 °C < TV ≤ +55 °C:
1000m s.l.m. < h ≤ 4000m
s.l.m.:
Posizione di montaggio
Spazio libero
Funzionamento in DC
2.5 %/K (vedi corrente nominale in uscita)
5 %/1000 m
verticale
in alto
100 mm
in basso
100 mm
possibile, eccetto BFVCE0022A e BFVCE0032A
Dati elettrici generali
Emissione rumore
Immunità verso il rumore
Resistenza di isolamento
Corrente di scarico verso PE
(secondo EN 50178)
Conforme a EN 50081–1
Valore limite classe A secondo EN 55011
Valore limite classe B secondo EN 55022
Conforme a EN 61800–3
Requisiti
Standard
Tempo di esecuzione
EN 61000–4–2
Interferenza RF (involucro) EN 61000–4–3
Esplosione
EN 61000–4–4
Impulso
EN 61000–4–5
(impulso su cavo principale)
Categoria III sovratensione secondo VDE 0110
> 3.5 mA
Restrizioni
3, cioè 8 kV con scarico d’aria,
6 kV con scarico contatti
3, cioè 10 V/m; 27…1000 MHz
3/4, cioè 2 kV/5 kHz
3, cioè 1.2/50 µs,
1 kV fase – fase, 2 kV fase–PE
Grado di protezione
Protezioni presenti
IP20
Corto circuito, difetti del collegamento a massa, oscillazioni del motore,
sovraccarico termico (Ingresso PTC o termocontatti, Controllo l2t)
Isolamento dei circuiti di
controllo
Isolamento dalla rete:
Matsushita Electric Works Italia
Doppio isolamento base secondo EN 50178
1–3
Dati tecnici
1.1
VF–CE Compatti
Dati generali
Controllo anello aperto e chiuso
Metodo di controllo
Frequenza portante
Coppia max.
Campo settaggio coppia
Velocità coppia
Controllo caratteristica V/f– (lineare, quadratica), controllo vettoriale
2 kHz, 4 kHz, 8 kHz, 16 kHz selezionabili
1.8 x Mnom per 60 s, se potenza nominale motore = potenza nominale inverter
1 : 10 (3 ... 50 Hz, velocità costante)
M/MN
2.0
1.8
1.0
500
Controllo velocità senza sensore Min. frequenza in uscita
Campo impostazioni
Precisione
Oscillazioni
Frequenza Campo
in uscita
Risoluzione
assoluta
normalizzata
Selezione valore
Precisione
riferimento digitale
Selezione valore
Linearità
riferimento analogico Sensibilità alla
temperatura
Ingressi/
con I/U standard
uscite
analogiche
1000
1500
n [min
± 0.5 %
+ 0.4 %
Livello segnale: 5 V o 10 V
0 … 40 °C
Offset
±0%
1 ingresso, su richiesta bipolare
1 uscita
con I/U standard
4 ingressi, su richiesta 1 ingresso in frequenza 0 ... 10 kHz; 1 ingresso per
bloccare l’inverter
1 uscita
Durata
ciclo
Ingressi digitali
Uscite digitali
Ingressi analogici
Uscite analogiche
1 ms
4 ms
2 ms
4 ms (tempo filtro: τ = 10 ms)
Contatto di scambio, AC 240 V/3 A, DC 24 V/2 A ... 200 V/0.18 A
Freno con transistor incorporato
Resistenza di frenatura esterna: (vedi pagina 9 – 3 )
1–4
]
1.0 Hz (0 ... Mnom)
(rif. a 50 Hz)
1 : 50
0.5 %
3 ... 50 Hz
± 0.1 Hz
– 480 Hz ... + 480 Hz
0.02 Hz
parametro: 0.01 %, dati processo: 0.006 % (= 214)
± 0.005 Hz (= ±100 ppm)
Ingressi/
uscite
digitali
Uscita a relè
Funzionamento in modalità
generatore (controllo interno)
–1
Matsushita Electric Works Italia
VF–CE Compatti
Dati tecnici
1.2
1.2
1.2.1
Dati nominali
Dati nominali
Funzionamento normale e con 150 % di sovraccarico
Tipo
Tensione di rete
Alim. alternativa DC
su +UG, –UG
Vcircuito [V]
VDC [V]
Dati per il funzionamento con
1/N/PE (3/PE) AC 240 V
BFVCE
0022A
BFVCE
0032A
BFVCE
0072A
BFVCE
0152A
BFVCE
0222A
1/N/PE AC 180 V – 0 % ... 264 V + 0 % ; 45 Hz – 0 % … 65 Hz + 0 %
3/PE AC 180 V – 0 % ... 264 V + 0 % ; 45 Hz – 0 % … 65 Hz + 0 %
non possibile
DC 140 V – 0 % ... 360 V + 0 %
1/N/PE
1/N/PE
1/N
/PE
3/PE
1/N/P
E
3/PE
1/N/P
E 3)
3/PE
Icircuito [A]
3.4
5.0
9.0
5.2
15.0
9.1
18.0
12.4
Pnom [kW]
Pnom [hp]
Potenza nominale in
S nom.8
uscita su U, V, W
[kVA]
0.25
0.34
0.68
0.37
0.5
1.0
Potenza nominale in
uscita su +UG, –UG 2)
Non possibile in DC
Corrente nominale
in ingresso
Potenza motore
(4 poli)
PDC [kW]
0.75
1.0
1.6
1.5
2.0
2.8
2.2
3.0
3.8
0
0.7
0
Corrente
2/4
Inom24 [A]
nominale in kHz*
uscita
8 kHz*
Inom.8 [A]
16 kHz* Inom.16 [A]
Corrente di 2/4
Imax24 [A]
sovraccarico kHz*
per 60s 1)
8 kHz*
Imax8 [A]
16 kHz* Imax16 [A]
Tensione motore
VM [V]
Perdita di potenza
Pperdita [W]
(funzionamento
con Inom.8)
1.7
2.4
4.0
7.0
9.5
1.7
1.1
2.5
2.4
1.6
3.6
4.0
2.6
6.0
7.0
4.6
10.5
9.5
6.2
14.2
2.5
1.7
3.6
2.3
Peso
0.8
0.8
m [kg]
6.0
10.5
14.2
3.9
6.9
9.3
0 ... 3 x Vcircuito / 0 Hz … 50 Hz, selezionabile fino a 480 Hz
30
40
60
100
130
1.2
1.6
1.6
In neretto = Dati per il funzionamento con 8 kHz di frequenza portante (impostazione di default)
continua
Matsushita Electric Works Italia
1–5
Dati tecnici
1.2
VF–CE Compatti
Dati nominali
Tipo
Tensione di rete
Alim. alternativa DC
su +UG, –UG
Vcircuito [V]
VDC [V]
BFVCE0074A
Dati per funzionamento con 3/PE AC 400 V6) 500 V6)
Corrente nominale in
Icircuito [A]
3.3
2.6
ingresso 4)
Potenza motore
(4 poli)
Potenza nominale in
uscita su U, V, W
Potenza nominale in
uscita su +UG, –UG 2)
Corrente
nominale in
uscita
2/4 kHz*
8 kHz*
16 kHz*
Corrente di
2/4 kHz*
sovraccarico
8 kHz*
per 60s 1)
16 kHz*
Tensione motore
Perdita di potenza
(funzionamento con
Inom.8)
Peso
BFVCE0154A
BFVCE0224A
BFVCE0404A
3/PE AC 320 V – 0 % ... 550 V + 0 % ; 45 Hz – 0 % … 65 Hz + 0 %
DC 450 V – 0 % ... 770 V + 0 %
400 V
5.5
500 V
4.4
400 V
7.3
500 V
5.8
400 V
12.3
500 V
9.8
Pnom [kW]
Pnom [hp]
Snom.8
[kVA]
0.75
1.0
1.7
1.5
2.0
2.7
2.2
3.0
3.9
4.0
5.4
6.6
PDC [kW]
0
1.5
0.8
–
Inom24 [A]
Inom.8 [A]
Inom.16 [A]
Imax24 [A]
Imax8 [A]
Imax16 [A]
VM [V]
Pperdita [W]
m [kg]
2.4
2.4
1.6
3.6
3.6
2.4
1.9
3.9
3.1
5.6
4.5
9.5
7.6
1.9
3.9
3.1
5.6
4.5
9.5
7.6
1.4 5)
2.5
2.3
3.6
3.4
6.2
4.9
3.6
5.9
5.9
8.4
8.4
14.2
–
3.6
5.9
5.9
8.4
8.4
14.2
–
2.2
3.9
3.5
5.6
5.0
9.3
–
0 ... 3 x V circuito / 0 Hz … 50 Hz, selezionabile fino a 480 Hz
60
100
130
180
1.2
1.6
1.6
2.3
In neretto = Dati per il funzionamento con 8 kHz di frequenza portante (impostazione di default )
1) Correnti per cambi periodici di carico con capacità di sovraccorrente di 1 min I
max.x e capacità di carico di 2 min
con 75% Inom.x.
2) Quando i motori sono in funzione questa potenza si può ottenere da bus DC.
3) Funzionamento con filtro per circuito principale.
4) Durante il funzionamento con filtro per circuito principale, la corrente del circuito si riduce di circa 30 %.
5) Max. lunghezza cavo ammessa: 10 m schermato.
6) La classe 400 V comprende sovratensioni + 10% (fino a 440 V + 0%).
La classe 500 V comprende sovratensioni + 10% (fino a 550 V + 0%).
Tensioni > 440 V rientrano nella classe 500 V.
* Frequenza portante dell’inverter.
1–6
Matsushita Electric Works Italia
VF–CE Compatti
Dati tecnici
1.2
1.2.2
Dati nominali
Funzionamento con 120% di sovraccarico
Tenendo conto delle limitazioni indicate di seguito, il carico dell’inverter può essere
aumentato durante il funzionamento. La capacità di sovraccarico è ridotta a 120%.
Applicazioni:
•
•
Pompe con carico secondo la legge di Lambert
Ventole
Funzionamento ammesso solo con
frequenza ≤ 4 kHz (C0018).
Tipo
Tensione di rete
Vcircuito
[V]
Alim. alternativa in
DC su +UG, –UG
VDC [V]
Dati per funzionamento con
1/N/PE (3/PE) AC 240 V
Corrente nominale
in ingresso
Potenza motore
(4 poli)
Potenza nominale in
uscita su U, V, W
BFVCE
0022A
BFVCE
0032A
BFVCE
0152A
BFVCE
0222A
1/N/PE AC 180 V – 0 % ... 264 V + 0 % ; 45 Hz – 0 % … 65 Hz + 0 %
3/PE AC 180 V – 0 % ... 264 V + 0 % ; 45 Hz – 0 % … 65 Hz + 0 %
non possibile
DC 140 V – 0 % ... 360 V + 0 %
1/N/PE
Icircuito
[A]
4.1
Pnom
[kW]
0.37
Pnom [hp]
S nom.4
[kVA]
0.5
0.8
1/N/PE
Potenza nominale in PDC [kW] Funz. in DC
uscita su +UG, –UG 2)
non possibile
Corrente
2/4
nominale in kHz*
uscita
Corrente di 2/4
sovraccarico kHz*
per 60s 1)
Tensione motore
Perdita di potenza
funzionamento con
Inom.x)
Peso
BFVCE
0072A3)
Inom24 [A]
2.0
Imax24 [A]
2.5
VM [V]
Pperdita
[W]
30
m [kg]
0.8
1/N/PE
3/PE
1/N/PE
3/PE
9.0
5.2
18.0
10.4
1.5
2.2
2.0
1.6
3.0
2.8
0.75
2.2
4.8
8.4
6.0
10.5
1/N/PE
3.0
0 ... 3 x V circuito / 0 Hz … 50 Hz, su richiesta fino a 480 Hz
60
100
1.2
1.6
3/PE
11.5 3)
Funzio
oname
ento co
on
120% di
d sovrraccari
rico
non
n autorrizzato
•
tensione di circuito pari a 1/N/PE (3/PE) AC 240 V / 50 Hz/60 Hz
oppure 3/PE AC 400 V / 50 Hz/60 Hz,
Funzio
ioname
ento co
on
120% di sovraccarrico
non
n autorrizzato
•
4.0
3.8
0
11.4
14.2
130
1.6
continua
Matsushita Electric Works Italia
1–7
Dati tecnici
1.2
VF–CE Compatti
Dati nominali
Tipo
BFVCE0074A3)
BFVCE0154A
BFVCE0224A3)
BFVCE0404A
Tensione di
rete
Vcircuito [V]
3/PE AC 320 V – 0 % ... 440 V + 0 % ; 45 Hz –0 % … 65 Hz + 0 %
Alim. altern.
DC su +UG,
–UG
VDC [V]
DC 450 V – 0 % ... 620 V + 0 %
Dati per funzionamento
con 3/PE AC
400 V
400 V
400 V
400 V
Icircuito [A]
2.9
4.7
6.6
11.4
Pnom [kW]
1.5
2.2
3.0
5.5
Pnom [hp]
2.0
3.0
4.0
7.5
Potenza
nom. uscita
su U, V, W
S nom.4
[kVA]
2.0
3.3
4.7
7.9
Potenza
nom. uscita
su +UG,
–UG 2)
Corrente
nominale in
uscita 2/4
kHz*
PDC [kW]
0.75
3.0
3.0
–
Inom24 [A]
2.9
4.7
6.7
11.4
Imax24 [A]
3.6
5.9
8.4
14.2
Corrente
nominale in
ingresso
Potenza
motore
(4 poli)
Max.
corrente di
sovraccarico
per 60s 1)
2/4 kHz*
Tensione
motore
Perdita di
potenza
funziona–
mento con
Inom.x)
Peso
1)
2)
3)
*
0 ... 3 x V circuito / 0 Hz … 50 Hz, su richiesta fino a 480 Hz
VM [V]
Pperdita [W]
60
100
130
m [kg]
1.2
1.6
1.6
210
Correnti per cambi periodici di carico con capacità di sovraccorrente di 1 min Imax.x e capacità di carico di 2 min
con 75% Inom.x
Quando i motori sono in funzione questa potenza si può ottenere da bus DC
Funzionamento con filtro per circuito principale
Frequenza dell’inverter
1–8
Matsushita Electric Works Italia
VF–CE Compatti
1.2.3
Dati tecnici
Funzionamento a bassa tensione dell’inverter VF–CE 230 V
Condizioni per il funzionamento dell’inverter VF–CE 230 V a basse tensioni:
•
Alimentazione monofase
Per tensioni < 180 V ridurre la potenza a max. 0.75 x In
(impostare C022 al 75%).
Suggerimento
Per tensioni < 180 V e alimentazioni monofase si
raccomandano ferriti come indicato in tabella:
•
•
Uscita inverter
Tipo di ferrite
250 W – 370 W
5 A / 9 mH
550 W – 750 W
9 A / 5 mH
1.5 KW – 2.3 KW
18 A / 2.5 mH
Alimentazione trifase
E’ possibile far funzionare l’inverter con alimentazione trifase e
tensione 115 V attenendosi ai valori nominali indicati per tensione e
sovraccarico.
Alimentazione DC (140 ... 360 V)
E’ possibile far funzionare l’inverter con alimentazione DC filtrata
attenendosi ai valori nominali indicati per tensione e sovraccarico.
Matsushita Electric Works Italia
1–9
Dati tecnici
1.3
VF–CE Compatti
Sezione fusibili e cavi
1.3
Sezione fusibili e cavi
L1, L2, L3, N, U, V, W, PE
Tipo
Circuito
principale
BFVCE0072A
BFVCE0152A
E.l.c.b. Sezione cavo
mm2
AWG
VDE
UL
VDE
mm2
AWG
M10 A
M10 A
10 A
10 A
C10 A
C10 A
1.5
1.5
15
15
M6 A
–
5A
–
B6 A
–
1
–
17
–
M16 A
M20 A
M20 A
15 A
20 A
20 A
B16 A
B20 A
B20 A
2.5
2 x 1.5
2 x 1.5
14
2 x 15
2 x 15
M16 A
M20 A
–
15 A
20 A
–
B16 A
B20 A
–
2.5
2 x 1.5
–
14
2 x 15
–
3/PE AC 240 V
M10 A
M16 A
M16 A
10 A
15 A
15 A
B10 A
B16 A
B16 A
1.5
2.5
2.5
15
14
14
M10 A
M16 A
M16 A
10 A
15 A
15 A
B10 A
B16 A
B16 A
1.5
2.5
2.5
15
14
14
3/PE AC 400 V
M6 A
M10 A
M10 A
M20 A
5A
10 A
10 A
20 A
B6 A
B10 A
B10 A
B20 A
1
1.5
1.5
4
17
15
15
12
M6 A
M10 A
M10 A
M16 A
5A
10 A
10 A
15 A
B6 A
B10 A
B10 A
B13 A
1
1.5
1.5
2.5
17
15
15
14
1/N/PE AC 240 V
2/PE AC 240 V
BFVCE0074A
BFVCE0224A
Fusibile
VDE
BFVCE0072A
BFVCE0154A
E.l.c.b. Sezione cavo
UL
BFVCE0222A
BFVCE0152A
BFVCE0222A
Fusibile
Con sovraccarico del 120%
VDE
BFVCE0022A
BFVCE0032A
Con sovraccarico del 150%
BFVCE0404A
Verificare la conformità con norme nazionali e regionali (es. VDE 0113, EN 60204)!
NOTA
Per inverter che richiedono ferriti sull’alimentazione principale quando
funzionano con sovraccarico 120%, i valori indicati in tabella si
riferiscono al funzionamento con ferriti. Tutti gli altri valori invece si
riferiscono al funzionamento senza ferriti sull’alimentazione principale.
Per il funzionamento con sistemi omologati UL:
•
Utilizzare fusibili e relativi contenitori omologati UL:
– da 500 V a 600 V nel circuito d’ingresso principale
(AC, F1 ... F3).
– Caratteristica di attivazione “H” o “K5”
•
1 – 10
Solo cavi omologati UL.
Matsushita Electric Works Italia
Capitolo 2
Installazione
2.1
2.2
2.3
Avvertenze importanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 3
2.1.1
Protezione delle persone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 3
2.1.1.1 Protezione tramite RCCB . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 3
2.1.1.2 Altre misure di protezione . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 4
2.1.2
Protezione del motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 5
2.1.3
Tipi / Caratteristiche del circuito principale . . . . . . . . . . . . . . . . . . . . 2 – 5
2.1.4
Interazione con dispositivi di compensazione . . . . . . . . . . . . . . . . . 2 – 5
2.1.5
Specifiche dei cavi utilizzati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 6
Installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 7
2.2.1
Installazione standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 8
2.2.2
Installazione su supporto mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 9
Collegamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 –10
2.3.1
Cablaggio dei connettori a innesto . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 10
2.3.2
Collegamento dell’alimentazione . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2.1 Collegamento dell’inverter a reti di alimentazione
a 240 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2.2 Collegamento dell’inverter a reti di alimentazione
a 400 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2.3 Collegamento motore / Resistenza frenatura esterna .
2 – 11
2 – 11
2 – 12
2 – 12
2.3.3
Installazione conforme ai requisiti EMC . . . . . . . . . . . . . . . . . . . . . 2 – 13
2.3.4
Collegamenti di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 14
2.3.4.1 Descrizione terminali per I/U standard . . . . . . . . . . . . . . 2 – 14
2.3.5
Collegamento uscita a relè . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 – 16
Installazione
2–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.1
2.1
Avvertenze importanti
Avvertenze importanti
L’inverter contiene componenti che possono essere
danneggiati da cariche elettrostatiche!
Prima di eseguire operazioni di assemblaggio e
manutenzione, è necessario scaricare il carico elettrostatico.
!
2.1.1
Protezione delle persone
2.1.1.1
Protezione tramite RCCB
Simboli sugli RCCB
Simbolo
Tipi di RCCB
interruttore per circuito AC
sensibile alle correnti residue
(RCCB, tipo AC)
sensibile a impulsi di corrente
(RCCB, tipo A)
sensibile a tutte le correnti
(RCCB, tipo B)
Protezione di persone e animali
DIN VDE 0100 con interruttori di circuito con corrente residua (RCCB):
L’inverter è dotato di un circuito rettificatore dell’alimentazione. Se si verifica un corto
circuito nel quadro, una lieve corrente residua DC può bloccare l’attivazione di RCCB
sensibili a correnti in DC o a impulsi di correnti e quindi sopprimere la funzione protettiva
per tutte le unità collegate.
Si raccomandano pertanto:
•
•
“RCCB sensibili a impulsi di correnti” per sistemi dotati di inverter in
un circuito AC monofase (L1/N).
“RCCB sensibili a tutte le correnti” in sistemi dotati di inverter
collegati a circuito trifase (L1/L2/L3).
Note sull’utilizzo di RCCB sensibili a correnti universali
Gli RCCB sensibili a tutti i tipi di corrente sono menzionati per la prima volta in
EN 50178, che è diventata effettiva a partire da Ottobre 1997.
Questo tipo di RCCB è menzionato anche in IEC 755.
continua
Matsushita Electric Works Italia
2–3
Installazione
2.1
VF–CE Compatti
Avvertenze importanti
Corrente nominale di errore
Utilizzare RCCB con correnti nominali di errore:
•
•
≥ 30 mA per inverter monofase fino a 2.2 kW
≥ 300 mA per inverter trifase.
Corrente di dispersione:
•
•
inverter monofase fino a 2.2 kW: < 10 mA
inverter trifase fino a 4 kW: 30–60 mA.
Un RCCB si può attivare inavvertitamente in queste condizioni:
•
•
•
elevate correnti di dispersione tra le schermature dei cavi
(soprattutto lunghi cavi schermati di motori),
collegamento simultaneo di più inverter al circuito principale
utilizzo di filtri aggiuntivi RFI.
Installazione
Gli RCCB possono essere installati solo tra alimentazione di rete e inverter.
2.1.1.2
Altre misure di protezione
Potenziale isolamento/protezione dal contatto
Ingressi e uscite di controllo di tutti gli inverter sono isolati elettricamente. Verificare la
descrizione dei terminali di ciascun tipo di inverter.
Connettori a innesto
Effettuare collegamento e scollegamento dei connettori solo in assenza di tensione!
Sostituzione di fusibili difettosi
Effettuare la sostituzione dei fusibili difettosi con modelli consigliati solo in assenza di
tensione.
•
•
L’inverter sopporta tensioni residue per un massimo di tre minuti
dopo essere stato scollegato dal circuito principale.
In una rete di drive, tutti gli inverter devono essere disattivati e
scollegati dal circuito principale.
Scollegamento dell’inverter dal circuito principale
Collegamento e scollegamento sicuri tra inverter e circuito principale sono possibili
soltanto tramite il contattore sul lato dell’ingresso.
2–4
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.1
2.1.2
Avvertenze importanti
Protezione del motore
Ulteriori misure di protezione contro sovraccarichi di corrente:
•
•
•
Tramite relè di sovracorrente o tramite controllo della temperatura.
Si raccomanda l’utilizzo di PTC o di termostati con caratteristiche
PTC per controllare la temperatura del motore.
All’inverter possono essere collegati PTC o termostati.
Usare esclusivamente motori con isolamento adeguato alle caratteristiche
dell’inverter:
•
•
2.1.3
Resistenza di isolamento: max. v = 1.5 kV, max. dv/dt = 5 kV/µs
Se si devono utilizzare motori con un isolamento non adeguato alle
caratteristiche dell’inverter, contattare il fornitore del motore stesso.
Tipi / Caratteristiche del circuito crincipale
Si raccomanda di prestare attenzione alle caratteristiche di ciascun tipo di circuito!
Circuiti
Funzionamento dell’inverter
Note
con neutro a massa
(circuiti TT/TN)
con neutro isolato
(circuiti IT)
nessuna limitazione
attenersi alle caratteristiche
nominali dell’inverter
possibile se l’inverter è protetto in caso di inconvenienti del
collegamento a massa nel circuito di alimentazione
• con dispositivi di rilevamento di inconvenienti del
collegamento a massa
• se l’inverter viene immediatamente scollegato dal circuito
non può essere garantito un
funzionamento corretto in
caso di inconvenienti del
collegamento a massa
2.1.4
Interazioni con dispositivi di compensazione
Gli inverter assorbono solo pochissima potenza dalla rete di alimentazione AC. Non è
necessaria quindi alcuna compensazione.
Utilizzando l’inverter in circuiti con dispositivi di compensazione, è necessario che
questi siano dotati di bobina d’arresto. Per i dispositivi di compensazione rivolgersi al
proprio fornitore.
Matsushita Electric Works Italia
2–5
Installazione
2.1
VF–CE Compatti
Avvertenze importanti
2.1.5
Specifiche dei cavi utilizzati
Osservanza delle normative
Utilizzare cavi conformi alle normative richieste per il tipo di applicazione (es. UL).
Utilizzare cavi a bassa capacità
Capacità per unità di lunghezza del cavo:
•
•
Cavo non schermato ≤ 75 pF/m
Cavo schermato ≤ 150 pF/m
Lunghezza max. cavo motore consentita senza dispositivi esterni:
•
•
schermato: 50 m
non schermato: 100 m
La capacità di schermatura di un cavo è determinata da:
•
•
•
2–6
un buon collegamento della schermatura del cavo
una bassa resistenza di schermatura.
Utilizzare solo cavi schermati con calze di rame placcate stagno o
nickel! Schermature con calze in acciaio non sono adatte
un’adeguata copertura della calza:
copertura di almeno 70 % – 80 % della superficie del cavo.
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.2
2.2
Installazione
Installazione
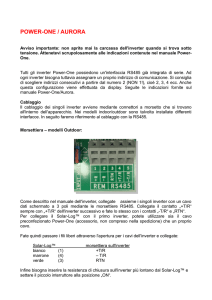
Schema generale dell’inverter VF–CE
Terminale X1:1
Collegamento rete e
alimentazione DC
Terminale X1.2:
Uscita relè
LED
Interfaccia AIF
Connettore per i moduli:
– Tastiera BFVC 904C
– PROFIBUS–DP BFVC 9901
– Modulo comunicazione
(RS232/RS485)
BFVC 9503
Interfaccia FIF
Connettore per i moduli:
– I/U standard BFVC 90XY
– PROFIBUS–DP BFVC 9902
Terminale X2.2:
Controllo temperatura
motore
Terminale X2.1:
Collegamento motore e
resistenza di frenatura esterna
Figura 1: Schema generale dell’inverter VF–CE
L’inverter VF–CE è dotato di modulo I/U standard.
Matsushita Electric Works Italia
2–7
Installazione
2.2
VF–CE Compatti
Installazione
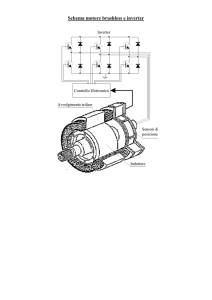
2.2.1
Installazione standard
Fissaggio
Dimensioni
b
b2
b1
e
d
a1
c1
a
c
M6
4Nm
35lbin
Figura 2: Installazione standard – montaggio fisso
b [mm]
b1 [mm]
b2 [mm]
BFVCE0022A
BFVCE0032A
a [mm]
150
130–150
120
BFVCE0072A
210
190–200
180
270
250–260
240
210
190–200
180
270
250–260
240
BFVCE0152A
BFVCE0222A
60
a1 [mm]
30
BFVCE0074A
BFVCE0154A
BFVCE0224A
BFVCE0404A
2–8
100
c [mm]
c1 [mm]
d [mm]
e [mm]
140
16
6.5
27.5
50
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.2
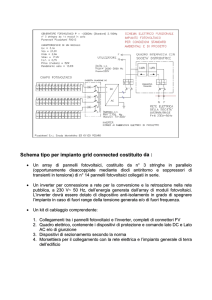
2.2.2
Installazione
Installazione su supporto mobile
Si consiglia di installare l’inverter su supporto mobile quando lo spazio di montaggio è
ristretto. Infatti l’inverter può essere ruotato di 90º e ciò permette di intervenire con
facilità per installazione, impostazioni di parametri o risoluzione di inconvenienti.
L’installazione su supporto mobile è necessaria per i modelli BFVCE015XA e
BFVCE022XA se devono essere montati di lato.
Codice prodotto set agganci: BFVC 9999.
Figura 3: Montaggio su supporto mobile
Avvitare qui
Fulcro di rotazione, fissaggio possibile a 45º, 90º, 135º, 180º
Avvitare qui per fissare il dispositivo con inclinazione 0º.
a [mm]
BFVCE0022A
BFVCE0032A
BFVCE0072A
BFVCE0152A
BFVCE0222A
BFVCE0074A
BFVCE0154A
BFVCE0224A
60
b [mm]
b1 [mm]
b2 [mm]
186
156 – 175
120
246
216 – 235
180
306
276 – 295
240
246
216 – 235
180
306
276 – 295
240
Matsushita Electric Works Italia
c [mm]
c1 [mm]
d [mm]
e [mm]
e1 [mm]
140
165
6.5
11.5
27.5
2–9
Installazione
2.3
VF–CE Compatti
Collegamento
2.3
2.3.1
Collegamento
Cablaggio dei connettori a innesto
NOTE
•
•
•
Cablare i connettori prima di collegarli all’inverter!
Collegare o scollegare i connettori solo quando l’inverter non
è attivato!
Inserire comunque nell’inverter i connettori non utilizzati per
proteggere i collegamenti.
Il cablaggio è molto semplice:
1
2
3
2.5 mm
m 2
AWG 14
7 mm
Figura 4: Cablaggio dei connettori
2 – 10
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.3
2.3.2
!
2.3.2.1
Collegamento
Collegamento dell’alimentazione
L’inverter modello BFVCExxx2A deve essere collegato
soltanto a circuiti a 240 V! Tensioni superiori potrebbero
danneggiare l’inverter!
Collegamento dell’inverter a reti di alimentazione a 240 V
BFVCE0022A
BFVCE0032A
X1.1
X1.1
L1 L2/N
L1
L1 L2/N
PE
N PE
PE
L1 L2 PE
1/N/PE AC 240 V
2/PE AC 240 V
BFVCE0072A
X1.1
+UG –UG L1 L2/N
L3
L1 N
+UG –UG
PE
L1 L2/N
L3
L1 L2
PE
1/N/PE AC 240 V
+UG –UG L1
PE
L2/N
L3
PE
L1 L2 L3 PE
PE
2/PE AC 240 V
3/PE AC 240 V
BFVCE0152A
BFVCE0222A
X1.1
+UG –UG L1
L1 L2/N L3/N
+UG –UG L1
PE
2
L1 L2/N L3/N
2
!
2
2.5 mm
L1
N
2
2.5 mm
PE
1/N/PE AC 240 V
!
L1
L2/N L3/N
PE
2
1.5 mm
2.5 mm
+UG –UG L1
PE
2
1.5 mm
1.5 mm
2
!
2
2.5 mm
2.5 mm
L1
L2
2
2.5 mm
L1 L2 L3 PE
3/PE AC 240 V
PE
2/PE AC 240 V
Usare 2 cavi separati Ø 1.5 mm2 per collegare il fusibile ai terminali!
Figura 5: Collegamento dell’inverter a rete di alimentazione a 240 V; alimentazione DC su +UG, –UG
Matsushita Electric Works Italia
2 – 11
Installazione
2.3
VF–CE Compatti
Collegamento
2.3.2.2
Collegamento dell’inverter a reti di alimentazione a 400 V
X1.1
BFVCE0074A
BFVCE0154A
BFVCE0224A
BFVCE0404A
X1.1 +UG –UG
L1 L2/N L3
PE
L1 L2 L3 PE
3/PE AC 240 V
Figura 6: Collegamento dell’inverter a reti di alimentazione a 400 V; alimentazione DC su +UG, –UG
Collegamento motore / Resistenza di frenatura esterna
T1
PE
W
T2
X2.2
V
2.3.2.3
U BR
2BR
1
X2.1
Figura 7: Collegamento motore
BR1, BR2
T1, T2
Resistenza di frenatura esterna
Controllo temperatura motore (PTC o termostato)
Suggerimento
Mantenere i cavi del motore più corti possibile per
un miglior funzionamento del drive.
2 – 12
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.3
2.3.3
Collegamento
Installazione conforme ai requisiti EMC
A
E
M
3~
PE
F
C
PE
B
PES
PES
PE
PE
D
PES
G
Figura 8: Installazione conforme ai requisiti EMC
Tenere separati i cavi di controllo e di rete dal cavo del motore!
Modulo funzione
Cavo di controllo (accessorio)
Usare cavi a bassa capacità. Capacità per unità di lunghezza del cavo:
•Cavo non schermato ≤ 75 pF/m
•Cavo schermato ≤ 150 pF/m
Pressacavi EMC
Collegamento del motore conforme ai dati sulla targhetta
Pannello di montaggio con superficie elettrificata
Collegare la schermatura del cavo a PE per una superficie quanto più
possibile larga. Utilizzare le staffe di montaggio in dotazione.
Matsushita Electric Works Italia
2 – 13
Installazione
2.3
VF–CE Compatti
Collegamento
2.3.4
Collegamenti di controllo
2.3.4.1
Descrizione terminali per I/U standard
Modulo I/U standard
STANDARD
Alimentazione interna X3/20
(+20V DC, max. 40mA)
Alimentazione esterna + 24 V DC
(+12V DC – 0% ... +30V DC + 0 %,
max. 120 mA)
S
GND2
GND1
+5V
8
AOUT1
AIN1
9
0 ... +5V
GND1
+5V
X3
7 20 28 E1 E2 E3 E4 39 A1 59
62 7 8
9
+20V
7 20 28 E1 E2 E3 E4 39 A1 59
AOUT1 AIN1
DIG
OUT1
DIG
OUT1
7 8 9
0 ... +5V
X3 62 7
GND1
+20V
7 8 9
ON
GND2
GND1
_
1k ... 10k
1k ... 10k
+
24 V est.
12 3 4 5
(+12 V DC – 0 %
...
+30 V DC + 0 %
max. 120 mA)
62 7 8 9 7 20 28 E1 E2 E3 E4 39 A1 59
Cablaggio minimo richiesto
X3/ Tipo di Funzione
segnale (neretto = impostazioni default )
Livello
Dati tecnici
8
Ingresso Ingresso di setpoint
analogico Modifiche tramite interruttori DIP
e C0034
0 ... +5 V
0 ... +10 V
–10 V ... +10 V
0 ... +20 mA
+4 ... +20 mA
+4 ... +20 mA
(controllo circuito aperto)
62
Uscita
Frequenza uscita
analogica
0 ... +10 V
Risoluzione: 10 bit
Errore linearità: ±0.5 %
Errore temperatura: 0.3 %
(0 ... +60ºC)
Resistenza ingresso
•Segnale tensione: > 50 kW
•Segnale corrente: 250 W
Risoluzione: 10 bit
Errore linearità: ±0.5 %
Errore temperatura: 0.3 %
(0 ... +60ºC)
Capacità carico: max. 2 mA
28
E1
E2
E3
E4
A1
1) o
Ingressi
digitali1)
Uscita
digitale
Blocco inverter (CINH)
Attivazione freq. fisse (JOG)
JOG1 = 20 Hz
JOG2 = 30 Hz
JOG3 = 40 Hz
Freno iniezione DC (DCB)
Cambio direzione di rotazione
Rotazione oraria/antioraria
CW/CCW
1 = AVVIO
E1
JOG1
1
JOG2
0
JOG3
1
1 = DCB attivo
E4
CW
0
CCW
1
E2
0
1
1
Pronta
0/+20 V per DC interno
0/+24 V per DC esterno
Selezione ingresso in frequenza
0 ... 10kHz a X3/E1 via C0425
Resistenza ingresso: 3.3 kW
1
= CHIUSO (+12 ... +30 V)
0
= APERTO (0 ... +3 V)
(livello PLC, HTL)
Capacità carico:
10 mA
50 mA
ingresso in frequenza 0 ... 10 kHz, configurazione tramite C0425
continua
2 – 14
Matsushita Electric Works Italia
VF–CE Compatti
Installazione
2.3
Collegamento
X3/ Tipo di Funzione
segnale (neretto = impostazioni di default)
Livello
Dati tecnici
9
–
Alimentazione DC interna
stabilizzata per valore riferimento
potenziometro
+5.2 V (riferimento: X3/7)
Capacità carico: max. 10 mA
20
–
+20 V (riferimento: X3/7)
Capacità carico: max. 40 mA
(Somma totale correnti di uscita!)
59
–
Alimentazione DC interna per
controllo I/U digitali
Alimentazione DC per A1
7
–
GND1, potenziale di riferimento
per segnali analogici
39
–
GND2, potenziale di riferimento
per segnali digitali
Segnale a X3/8
1
0 ... 5 V
0 ... 10 V (impostazione di default)
0 ... 20 mA
4 ... 20 mA
4 ... 20 mA controllo circuito aperto
–10 V ... +10 V
OFF
OFF
OFF
OFF
OFF
ON
+20 V (interna, salto a
X3/20)
+24 V (esterna)
–
–
collegamento in rete isolato da
GND2
collegamento in rete isolato da
GND1
Posizione interruttore
2
3
4
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
ON
ON
ON
OFF
OFF
OFF
ON
ON
ON
OFF
C0034
5
OFF
ON
OFF
OFF
OFF
OFF
0
0
0
1
3
2
NOTE
•
•
Impostare sempre lo stesso range per interruttori DIP e C0034,
altrimenti l’inverter non è in grado di leggere correttamente il
segnale analogico a X3/8.
Se il potenziometro del valore di riferimento è alimentato
internamente tramite X3/9, la tensione del DIP deve essere
impostata tra 0 e 5 V. Diversamente non è possibile sfruttare
l’intero range di velocità.
Matsushita Electric Works Italia
2 – 15
Installazione
2.3
VF–CE Compatti
Collegamento
2.3.5
!
Collegamento uscita a relè
Terminali e uscita a relè sono dotati di isolamento di base
singolo (singola distanza di isolamento).
In caso di inconvenienti, la protezione dei contatti può essere
garantita solo con misure aggiuntive.
VF–CE
X1.2
K14
K11
K12
AC 240V / 3A
DC 24V / 2A ... DC 200V / 0.18A
Figura 9: Collegamento uscita a relè K1 PES
X1.2/ Tipo Segnale Funzione
K11
K12
K14
2 – 16
Uscita a relè
(neretto = impostazioni default )
Contatto N.C. uscita a relè
TRIP
Comune del relè
Contatto N.A. uscita a relè
TRIP
Schermatura dei terminali tramite collegamento PE
Impostazione
relè selezionata
Dati tecnici
aperto
chiuso
AC 240 V/3 A
DC 24 V/2 A ... DC 200 V/0.18 A
isolamento base singolo
Matsushita Electric Works Italia
Capitolo 3
Avviamento
3.1
Prima dell’accensione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 – 3
3.1.1
Impostazione rapida con menu utente . . . . . . . . . . . . . . . . . . . . . . . 3 – 4
3.1.2
Accesso a tutti i parametri del drive con menu ALL . . . . . . . . . . . . 3 – 6
3.2
Avviamento con il modulo I/U standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 – 7
3.3
Avviamento con moduli di comunicazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 – 9
Avviamento
3–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Avviamento
3.1
3.1
Prima dell’accensione
Prima dell’accensione
Le impostazioni di fabbrica dell’inverter permettono di comandare i seguenti motori
standard asincroni a 4 poli:
•
•
•
230/400 V, 50 Hz
280/480 V, 60 Hz
400 V, 50 Hz
Seguire la sequenza per l’avvio!
In caso di errori durante l’avviamento, vedere pagina 6 – 3 “Soluzione dei problemi ed
eliminazione degli errori”.
Prima di collegare l’inverter alla tensione di alimentazione
•
•
•
Controllare il cablaggio contro i corto circuiti e i collegamenti errati
a massa.
Controllare che la copertura sia montata correttamente.
Verificare che sia usata la tensione interna di alimentazione X3/20
degli I/U standard e che i terminali X3/7 e X3/39 siano collegati a
ponte.
Prima di attivare l’inverter, controllare l’impostazione dei parametri principali del
drive
•
•
•
•
La frequenza nominale V/F è adatta al collegamento del motore?
(vedere pagina 5 – 6).
La configurazione degli I/U analogici è adatta al cablaggio? (vedere
pagina 5 – 47).
La configurazione degli I/U digitali è adatta al cablaggio? (vedere
pagina 5 – 50).
I parametri del drive più importanti per l’applicazione sono impostati
correttamente?
Se necessario adattarli tramite PC o tastiera (vedere pagina 4 – 3 e
segg.).
Matsushita Electric Works Italia
3–3
Avviamento
3.1
VF–CE Compatti
Prima dell’accensione
3.1.1
Impostazione rapida con menu utente
Il menu utente elenca tutti i parametri richiesti per un’applicazione standard con
controllo lineare a caratteristica V/f. Il menu utente si attiva dopo ogni collegamento del
circuito principale.
Come modificare i parametri in menu utente
Azione
Tasto
1
Collegamento
tastiera
2
Blocco
inverter
Impostazione
parametri
3
4
Esito
Note
Esempio
La funzione è attivata. Il primo codice del
xx.xx Hz menu utente è visualizzato (C0517/1,
impostazione di default : C0050 = frequenza in
uscita).
E’ necessario solo se si vuole trasferire il set di
parametri (C0002).
XXXX
5
6
7
8
9
10
001
XXX
Selezione codice
0012
Per codici senza sottocodici: passare
direttamente a (vedere punto 7)
Selezione sottocodici
XXXXX
STOre
Ridurre C0012
(tempo di
accelerazione)
da 5.00s a
1.00s.
5.00 s
1.00 s
Impostazione parametri
Confermare se lampeggia
Confermare se non lampeggia; non è
attivo
Ripartire dal punto 3 per impostare altri parametri
NOTE
•
•
3–4
Utilizzare C0002 “Trasferimento set parametri” per trasferire
facilmente configurazioni da un inverter all’altro o per
resettare l’inverter in caso di impostazioni errate.
Per dettagli sul menu utente, vedere pagina 5 – 62.
Matsushita Electric Works Italia
VF–CE Compatti
Avviamento
3.1
Prima dell’accensione
Impostazioni di default nel menu utente:
Parametri del drive
Valori visualizzati
Frequenza in uscita
Segnali ingressi analogici
Range valore di rif. in ingresso
con modulo I/U standard
Codice Impostazione di default
Segnali ingressi digitali
Configurazione fissa – segnali
ingressi digitali
(determina quali funzioni
dell’inverter possono essere
attivati via ingressi digitali)
C0050
Pagina
Solo visualizzazione
C0034
–0–
0 ... +5 V / 0 ... +10 V / 0 ...
+20 mA
Ingresso analogico 5 – 27
1 (X3/8)
C0007
–0–
E4
E3
E2
E1
rotazione
DCB
JOG2/3 JOG1/3
oraria /
antioraria
CW/CCW
rotazione
DC–
APERTO
CHIUSO JOG1
oraria /
(20 Hz)
freno
antioraria iniezione CHIUSO APERTO JOG2
CW/CCW
(30 Hz)
5 – 50
JOG3
(40 Hz)
Frequenze JOG
CHIUSO
Dati macchina
Range velocità
Min. frequenza
in uscita
Max.
frequenza in
uscita
Tempi di
Tempo di
accelerazione e accelerazione
decelerazione
Tempo di
decelerazione
Prestazioni del drive
Corrente,
Frequenza
coppia,
nominale V/f
potenza
Vmin
sovralimentaz.
Trasferimento set parametri
Sostituire tutti i set parametri
dell’inverter con i dati della
tastiera
Sostituire un singolo parametro
dell’inverter con i dati della
tastiera
Copiare tutti i set parametri sulla
tastiera
Trasferimento del set parametri
Matsushita Electric Works Italia
5 – 17
C0010 0.00 Hz
C0011
50.00
Hz
C0012
5.00 s
C0013
5.00 s
C0015
50.00
Hz
5 – 20
5–6
C0016 0.00 %
C0002
Sostituire il set di parametri
selezionato dell’inverter con
l’impostazione di default
CHIUSO
–0–
Funzione eseguita
–1–
Impostazione di Default ⇒ PAR1
–2–
Impostazione di Default ⇒ PAR2
–3–
Impostazione di Default ⇒ PAR3
–4–
Impostazione di Default ⇒ PAR4
–10–
Tastiera ⇒ PAR1 ... PAR4
–11–
–12–
–13–
–14–
–20–
5 – 59
Tastiera ⇒ PAR1
Tastiera ⇒ PAR2
Tastiera ⇒ PAR3
Tastiera ⇒ PAR4
PAR1 ... PAR4 ⇒ Tastiera
–31– ...
–80–
3–5
Avviamento
3.1
VF–CE Compatti
Prima dell’accensione
3.1.2
Accesso a tutti i parametri del drive con menu ALL
Il menu ALL elenca tutti i parametri dei drive. Essi possono essere usati per ottimizzare
le prestazioni del drive o per impostare i parametri per applicazioni speciali.
Come modificare i parametri nel menu ALL:
Azione
Tasti
1
Collegamento
tastiera
2
Passaggio al
menu ALL
3
5
7
8
Blocco
inverter
Impostazione
parametri
001
XXX
XXXXX
STOre
10
11
12
13
Passaggio alla barra funzione 2
Selezione menu ALL(lista di tutti i codici)
XXXX
9
Esempio
La funzione è attivata. Il primo codice
xx.xx Hz nel menu utente è visualizzato (C0517/1,
impostazione di default : C0050 = frequenza
in uscita)
all
4
6
Risultato Note
14
Conferma selezione e passaggio alla barra
funzione 1
Necessario solo se si cambia C0002, C0148,
C0174 e/o C0469
Selezione codici
Impostare
C0008 = 3.
0008
Per codici senza sottocodici: passare
direttamente a . (vedere punto 11)
Selezione sottocodici
3
Impostazione parametri
Conferma se visualizzato
Conferma se non visualizzato. non
attivo
Ripartire dal punto 7 per impostare altri
parametri
NOTA
La tabella codici è nello stesso ordine del menu ALL (vedere
pagina A – 3).
Principali impostazioni di default nel menu ALL
Parametri del drive
Dati macchina
Valori limite
Modo motore
corrente
Modo generatore
Prestazioni del drive
Corrente,
Modo controllo
coppia
potenza
Compensazione
scorrimento
3–6
Codice Impostazione di default
Pagina
5 – 18
C0022 150 %
C0023 150 %
C0014
–2–
C0021 0.0 %
Caratteristica lineare V/f– V ~ f Vmin con
sovralimentazione costante
5–3
5–9
Matsushita Electric Works Italia
VF–CE Compatti
Avviamento
3.2
3.2
Avviamento con modulo I/U standard
Avviamento con modulo I/U standard
Azione
Impostazione di default
1
Collegamento
tastiera a interfaccia
AIF (pagina 4 – 5)
2
Attivazione tensione L’inverter funziona dopo 1 sec.
di rete
Il blocco inverter è attivo.
3
Controllo ingressi
digitali
E4
rotaz.
CW
APERTO
rotaz.
CCW
CHIUSO
E3
E2
Impostazione
individuale
Reazione drive
Il LED verde
lampeggia
Tastiera: E1
APERTO APERTO APERTO
4
Selezione valore
di riferimento
Applicare una tensione di 0 ... +10 V a
X3/8.
5
Attivazione inverter
tramite terminale
X3/28 = CHIUSO (+12 ... +30 V)
6
Se necessario
5 – 3 segg.
ottimizzare
funzionamento drive
• C0007 permette di
adattare gli ingressi
digitali all’applicazione.
• Il controllo dell’ingresso
digitale deve permettere
al drive di ripartire via
terminale dopo l’avvio
dell’inverter.
• In base alla posizione
dell’interruttore DIP sul
modulo:
– applicare corrente o
tensione a X3/8.
– controllare C0034.
• Altri modi di selezionare
il valore di riferimento:
5 – 26
LED verde acceso
spento.
Drive funzionante
NOTE
•
•
•
L’avviamento del drive con impostazioni di default è possibile
senza tastiera se non è richiesto il passo “6”.
Se la configurazione differisce dalle impostazioni di default,
leggere le istruzioni in “Impostazioni individuali”.
Assicurarsi che il range del valore di riferimento sia impostato
correttamente con interruttore DIP e che C0034 corrisponda
alle impostazioni dell’interruttore DIP.
– Es. : Selezione valore di riferimento (0 ... 5 V)
tramite potenziometro a X3/7, X3/8 e X3/9
⇒ C0034 = 0, Interruttore DIP 1 = OFF, 2 = OFF, 3
= ON, 4 = OFF, 5 = OFF
continua
Matsushita Electric Works Italia
3–7
Avviamento
3.2
VF–CE Compatti
Avviamento con modulo I/U standard
•
L’inverter funziona solo se il segnale CHIUSO viene applicato
a X3/28 (attivazione dell’inverter via terminale).
– Tenere presente che l’inverter può essere
bloccato in vari modi. Questi hanno lo stesso
effetto di un collegamento in linea di interruttori.
– Se l’inverter non si attiva via X3/28, controllare
che non sia bloccato in altri punti (vedere a tal
proposito pagina 5 – 16).
3–8
Matsushita Electric Works Italia
VF–CE Compatti
Avviamento
3.3
3.3
Avviamento con moduli di comunicazione
Avviamento con moduli di comunicazione
Le istruzioni per l’attivazione sono descritte nei seguenti manuali:
•
•
•
RS232C/RS485 Communication Module – Technical Specifications
ACGM0181END.
PROFIBUS AIF Module DP Slave – Operating Instructions
ACGM0182END (in lavorazione).
PROFIBUS FIF Module DP Slave – Operating Instructions
ACGM0183END.
Matsushita Electric Works Italia
3–9
Avviamento
3.3
3 – 10
VF–CE Compatti
Avviamento con moduli di comunicazione
Matsushita Electric Works Italia
Capitolo 4
Impostazione parametri
4.1
Indicazioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 – 3
4.2
Impostazione parametri con moduli comunicazione . . . . . . . . . . . . . . . . . . . 4 – 4
4.3
4.2.1
Impostazione parametri tramite tastiera . . . . . . . . . . . . . . . . . . . . . .
4.2.1.1 Dati generali / Condizioni di utilizzo . . . . . . . . . . . . . . . . . .
4.2.1.2 Installazione / Attivazione . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1.3 Visualizzazioni e funzioni . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1.4 Modifica e salvataggio parametri tramite tastiera . . . . . .
4.2.1.5 Variazione dei set di parametri . . . . . . . . . . . . . . . . . . . . . .
4.2.1.6 Variazione delle voci nel menu utente . . . . . . . . . . . . . . .
4.2.1.7 Password di protezione . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–4
4–4
4–5
4–6
4–7
4–8
4–8
4–9
4.2.2
Impostazione parametri con il modulo RS232C / RS485 . . . . . . . . 4 – 11
4.2.2.1 Dati generali / Condizioni di utilizzo . . . . . . . . . . . . . . . . . . 4 – 11
4.2.2.2 Tempo di trasferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 – 12
4.2.2.3 Collegamento ad un PC o PLC . . . . . . . . . . . . . . . . . . . . 4 – 13
4.2.2.4 Impostazione parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 – 14
4.2.2.5 Ulteriori codici per il modulo RS232C / RS485 . . . . . . . 4 – 14
4.2.2.6 Soluzione di problemi ed eliminazione di errori . . . . . . . 4 – 18
Impostazione parametri con modulo PROFIBUS AIF . . . . . . . . . . . . . . . . . 4 – 19
Impostazione parametri
4–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.1 Indicazioni generali
4.1
Indicazioni generali
L’impostazione dei parametri permette di adattare l’inverter alla specifica applicazione.
Le funzioni sono descritte in dettaglio nella libreria funzioni (vedere pagina 5 – 3 segg.).
Le possibili impostazioni di funzione sono organizzate per codici:
•
•
•
I codici sono numerati e iniziano per “C”.
La tabella riassuntiva dei codici permette di effettuare una ricerca
veloce.
I codici sono elencati in ordine progressivo (vedere pagina A – 3).
Ciascun codice contiene parametri utilizzabili per regolare e
ottimizzare il funzionamento del drive.
•
Per agevolare l’impostazione dei parametri, alcuni codici hanno
sottocodici che contengono i parametri (esempio: C0517).
La parametrizzazione avviene tramite i moduli di comunicazione (tastiera, modulo
RS232C/RS485 o modulo PROFIBUS–DP), che sono disponibili come accessori.
NOTA
In caso di problemi in fase di impostazione, caricare le
impostazioni di default sotto C002 e cominciare di nuovo
dall’inizio.
Matsushita Electric Works Italia
4–3
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
4.2
Impostazione parametri con moduli comunicazione
Con i moduli di comunicazione è possibile
•
•
•
•
•
impostare i parametri del propio inverter
controllare il proprio inverter (es. blocco e attivazione)
selezionare valori di riferimento
visualizzare dati operativi
trasferire gruppi di parametri ad altri inverter.
NOTA
Durante il funzionamento dell’inverter è possibile sia
inserire/rimuovere i moduli di comunicazione che impostare
alcuni parametri.
4.2.1
Impostazione parametri tramite tastiera
Senza un terminale portatile, la tastiera può essere collegata direttamente all’interfaccia
AIF.
Con il terminale portatile, la tastiera può essere collegata direttamente all’interfaccia AIF
usando cavi di varia lunghezza.
4.2.1.1
Dati generali / Condizioni di utilizzo
Tensione di isolamento
a massa / PE
50 V AC
Grado di protezione
IP55
Temperatura ambiente
Funzionamento: –10 ... +60 °C
Trasporto:
–25 ... +60 °C
Magazzinaggio: –25 ... +60 °C
Condizioni climatiche
Classe 3K3 secondo EN 50178 (senza condensa, umidità relativa media 85 %)
Dimensioni (Lu x La x H)
75 mm x 62 mm x 23 mm
4–4
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
4.2.1.2
Installazione / Attivazione
Con terminale portatile
Senza terminale portatile
Impostazione di base
1. Se necessario, collegare la
1. Collegare la tastiera
tastiera al terminale e fissare
all’interfaccia AIF.
le viti.
2. Collegare terminale portatile e
interfaccia AIF tramite un
cavo.
Quando viene fornita alimentazione, il modulo di comunicazione è
pronto per il funzionamento.
A questo punto è possibile comunicare con il drive e impostare o
leggere tutti i parametri.
VF–CE
NOTE
•
•
La tastiera viene fissata sul lato posteriore del terminale
portatile (rimuovere la protezione in gomma).
La tastiera può essere fissata su un pannello del quadro di
controllo utilizzando il kit di montaggio (porta) (foro del
pannello 45.3 x 45.3 mm; spessore max. pannello 2 mm).
Matsushita Electric Works Italia
4–5
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
4.2.1.3
Visualizzazioni e funzioni
Tasti funzione
Visualizzazione stato
Display barre grafiche
Barra funzione 1
Barra funzione 2
Set parametri attivi da
cambiare
Numero codice
Numero sottocodice
Valore parametro e
unità di misura
Se il display
lampeggia è
possibile
effettuare
modifiche
Tasti funzione
Tasto
Funzione
Descrizione
Abilitazione inverter
Blocco inverter (CINH) o impostazione arresto
rapido (QSP)
Passaggio barra funzione 1 ↔ barra funzione 2
A destra e a sinistra con barra funzione attiva
Aumento/diminuzione del valore
Scorrimento: tenere il tasto premuto
Salvataggio parametri se lampeggia.
Conferma da STOre nel display.
X3/28 deve essere sul livello CHIUSO
Configurazione in C0469
La funzione attuale è indicata in un riquadro
Possono essere cambiati solo i valori che
lampeggiano
Visualizzazione stato
(Descrizione dei messaggi di errore:vedere pagina 6 – 3 segg. )
Display
Significato
Pronto
Inibizione impulsi
Superamento limite corrente impostata
Allarme attivo
Errore attivo
Descrizione
Uscite di potenza disabilitate
C0022 (modo motore) o C0023 (modo
generatore)
Visualizzazione grafico a barre
Valore in % impostato in C0004.
(Impostazione di default: capacità di carico
unitaria C0056).
Range del display: – 180 % ... + 180 %
(singola barra = 20 %)
Barra funzione 1
Funzione Significato
Selezione valore di riferimento tramite Descrizione
Funzione display:
• . Visualizzazione unità di memoria 1 del menu
utente (C0517/1)
• . Visualizzazione set di parametri attivi
Selezione codici
Selezione sottocodici
Modifica parametri di un (sotto–)codice
Visualizzazione valori con oltre 5 cifre
H:
valori elevati
L:
valori bassi
Impossibile con password di protezione attiva
(display = "loc")
Attiva dopo ogni collegamento in rete
4–6
Display a 4 cifre del codice attivo numero Display a 3 cifre del sottocodice attivo num. Display a 5 cifre del valore effettivo Visualizza "HI"
Visualizza "lo"
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
Barra funzione 2
Funzione Significato
• . Display es. PS 2 ( )
• . Il gruppo di parametri è attivabile soltanto
Selezione menu
tramite segnali digitali (configurazione con
C0007) o modulo di comunicazione.
user Elenco codici nel menu utente (C0517)
Il menu utente si attiva dopo ogni
all
Elenco di tutti i codici
collegamento in rete. Se necessario,
attivare il menu all per accedere a tutti i funci Codici specifici per il modulo di
. . . . . . comunicazione PROFIBUS–DP
codici.
4.2.1.4
Modifica e salvataggio parametri tramite tastiera
Azione
1.
Tasti Esito
Collegamento
tastiera
xx.xx
Hz
2.
3.
Attivazione
menu ALL
4.
5.
6.
Blocco
inverter
7.
Impostazione
8.
Descrizione
Selezione del gruppo di parametri 1 ... 4 da
modificare
parametri
9.
10.
11.
12.
13.
Note
Esempio
La funzione è attivata. Viene visualizzato il
primo codice del menu utente (C0517/1,
impostazione di default: C0050 = frequenza in
uscita).
Passaggio alla barra funzione 2
all
Selezione del menu ALL(elenco di tutti i codici)
Conferma selezione e passaggio a barra funzione
1
Necessario solo per cambiare C0002, C0148,
C0174 e/o C0469
XXXX
Selezione codice
Per codici senza sottocodici: passare direttamente
a (vedere punto 11)
001
XXX
0008
Impostare C0008
= 3.
Selezione sottocodici
XXXXX
STOre
14.
Impostazione parametri
3
Conferma dato inserito se lampeggia
Conferma dato inserito se non lampeggia; non è attivo
Ripartire dal punto 7 per impostare altri parametri
NOTA
Il menu utente è attivo dopo ogni collegamento in rete. Attivare il
menu ALLper accedere a tutti i codici.
Matsushita Electric Works Italia
4–7
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
4.2.1.5
Variazione dei set di parametri
Azione
Selezione
funzione
1.
2.
Selezione
set
parametri
3.
4.
5.
Tasti Esito
Note
Passaggio alla barra funzione 2
Esempio
Selezione del set
parametri 2
1 ... 4
Seleziona del set di parametri da variare
2
Conferma della selezione e passaggio alla
barra funzione 1
Come descritto in 4.2.1.4
Impostazione
parametri
NOTE
•
•
4.2.1.6
2.
Passaggio
al menu ALL
3.
4.
5.
6.
7.
10.
Tasti Esito
Note
Passaggio alla barra funzione 2
Esempio
all
Selezione menu ALL(elenco di tutti i codici)
Conferma della selezione e passaggio alla barra
funzione 1
Selezione
menu
utente
0517
Codice per menu utente
Selezione
locazione
memoria
Viene visualizzato il codice registrato in C0517/1
(impostazione di default: frequenze di uscita
C0050)
Inserire C0014
(modalità controllo)
0517 nella locazione 2 del
menu utente.
L’impostazione
esistente verrà
sovrascritta.
Selezione sottocodici
002
Inserimento del numero del codice
Nessun controllo che esista effettivamente il
numero di codice inserito!
0 per cancellare l’inserimento
Conferma dell’inserimento
14
8.
9.
Il set di parametri attivo durante un’operazione può essere
visualizzato utilizzando la funzione .
Variazione delle voci nel menu utente
Azione
1.
La tastiera può essere utilizzata soltanto per modificare il set
di parametri e le loro impostazioni. Utilizzare segnali digitali
per attivare un set di parametri (configurazione sotto C0007)!
Variazione
inserimento
11.
001
001 ...
010
STOre
12.
XXXXX
Ripartire dal punto 7 per effettuare altre modifiche
di locazione memoria
NOTA
Per dettagli sul menu utente, vedere pagina 5 – 62.
4–8
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
4.2.1.7
Password di protezione
Attivazione protezione password
Azione
1.
2.
Tasti Esito
Passaggio al menu ALL
3.
4.
5.
6.
Inserimento
password
7.
8.
9.
10.
11.
12.
13.
Attivazione
della
password
passando
al menu
utente
Note
Esempio
Passaggio alla barra funzione 2
all
Selezione menu ALL(elenco di tutti i codici)
Conferma della selezione e passaggio alla barra
funzione 1
0094
Codice per password
0094
Impostazione password
123
Inserire e attivare la
password 123
XXXX
STOre
Conferma password
Passaggio alla barra funzione 2
user
Selezione menu utente
!
Conferma della selezione e passaggio alla barra
funzione 1
Il simbolo della chiave indica che è stata attivata
la password di protezione
NOTE
•
•
•
Se è attivata la protezione password (C0094 = 1 ... 9999), è
possibile accedere soltanto al menu utente.
Per accedere a tutte le altre funzioni, inserire la propria
password.
Non dimenticare la propria password! Se viene dimenticata,
contattare la propria agenzia Matsushita Electric Works!
Matsushita Electric Works Italia
4–9
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
Attivare una funzione protetta da password
Azione
1.
2.
3.
4.
5.
6.
7.
8.
Tasti
Attivazione
vari
funzione
protetta da
password
Disattivazione temporanea
protezione
password
Accesso a
tutte le
funzioni
Riattivazione
della
protezione
password
passando al
menu utente
Esito
pass
0
Note
pass
xxxx
Impostazione password
Disattivare
temporaneamente la
password 123
!
!
store
vari
Esempio
Cercando di attivare una funzione protetta da
password, 0 lampeggia
123
La conferma password ! è off
Ora è possibile accedere a tutte le funzioni
Passaggio alla barra funzioni 2
user
Selezione menu utente
!
Conferma selezione e passaggio alla barra
funzione 1
La protezione password è di nuovo attiva
Disattivazione permanente protezione password
Azione
1.
Passaggio al
menu ALL
Tasti
Esito
pass
0
Note
0 lampeggiante
Esempio
pass
xxxx
Impostazione password
123
store
La conferma della password
! è off
Passaggio alla barra funzioni 2
Disattivare
permanentemente
la password 123
!
2.
3.
4.
!
5.
6.
7.
Disattivazione
permanente
protezione
10. password
8.
9.
11.
12.
4 – 10
all
Selezione menu ALL(elenco di tutti i codici)
Conferma selezione e passaggio alla barra
funzioni 1
0094
Codice per password
0094
Cancellazione password
0
0
store
Conferma inserimento
E’ possibile accedere nuovamente a tutte le
funzioni senza protezione password
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
4.2.2
Impostazione parametri con il modulo RS232C/RS485
Il modulo di comunicazione RS232C/RS485 collega l’inverter ad un sistema ospite
(es. PC o PLC) utilizzando un’interfaccia RS232C.
Per impostare parametri con il modulo di comunicazione sono necessari ulteriori
accessori:
•
•
Software di impostazione parametri NAiS Motion Control
Cavo sistema PC.
NOTE
Per ulteriori informazioni, fare riferimento anche a RS232C/RS485
Communication Module – Technical Specifications
ACGM0181END.
4.2.2.1
Dati generali / Condizioni di utilizzo
Moduli di comunicazione
BFVC 9503
Tipo di collegamento
RS232C
Protocollo di comunicazione
LECOM–A/B V2.0
Formato caratteri
7E1: 7 bit ASCII, 1 bit di stop, 1 bit di start, 1 bit di parità (pari)
Velocità [bit/s]
1200, 2400, 4800, 9600, 19200
Stazione
Slave
Tipo di rete
Punto–punto
No. max. di stazioni
1
Lunghezza max. cavo
15 m
Tempo di trasferimento
vedere tabella alla pagina seguente
Collegamento PC
Zoccolo a 9 poli Sub–D
Tensione di alimentazione DC
Interna
Tensione di isolamento a PE
50 V AC
Tipo di protezione
IP20
Temperatura ambiente
Funzionamento:
Trasporto:
Magazzinaggio:
Condizioni climatiche
Classe 3K3 secondo EN 50178 (senza condensa, umidità relativa
media 85%)
Dimensioni (Lu x La x H)
75 mm x 62 mm x 23 mm
Matsushita Electric Works Italia
0 ... +50 °C
–25 ... +70 °C
–25 ... +55 °C
4 – 11
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
4.2.2.2
Tempo di trasferimento
Il tempo necessario per la comunicazione con il drive può essere suddiviso in fasi
successive:
Fase
t0
t1
t2
t3
t4
t5
t6
Componenti attivi
Azione
Programma utente
Driver software
Trasmette la richiesta all’inverter
Converte la richiesta al protocollo LECOM e avvia la trasmissione
Comunicazione (trasmissione seriale) con l’inverter (tempo del messaggio)
Elabora la richiesta ed emette la risposta
Trasmissione risposta (tempo di trasferimento)
Valuta le risposte e le converte nel formato del programma utente
Riceve i risultati
Inverter
Software
Programma utente
Tempo di trasferimento (t2, t4) [ms]
Velocità [bits/s]
1200
2400
4800
9600
19200
Messaggio tipo SEND
(Invio dati al drive)
t2standard (valore parametro = 9 cifre)
Tempo aggiuntivo per estensione
indirizzi
150
41.6
75
20.8
37.5
10.4
18.8
5.2
9.4
2.6
Messaggio tipo RECEIVE
(Ricezione dati dal drive)
t4standard (valore parametro = 9 cifre)
Tempo aggiuntivo per estensione
indirizzi
166.7
83.3
83.3
41.7
41.7
20.8
20.8
10.4
10.4
5.2
Tempo necessario per
singole cifre1)
per cifra [ms]
8.4
4.2
2.1
1
0.52
Tempo di elaborazione dell’inverter (t3)
Scrittura codici
Lettura codici
1)
t3 [ms]
20
20
Il tempo di trasferimento sarà diverso da quello indicato se il testo di un messaggio ha più o meno di 9 caratteri.
4 – 12
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
4.2.2.3
Collegamento ad un PC o PLC
Distribuzione dei pin su uno zoccolo a 9 poli SubD
Pin Nome
Installazione/attivazione
Ingresso (I) / Descrizione
uscita (O)
1
–
–
Non assegnato
2
RxD
I
Linea “Ricezione dati”
3
TxD
O
Linea “Invio dati”
4
DTR
O
Controllo trasmissione
5
GND
–
Terra
6
DSR
I
Non assegnato
7
–
–
Non assegnato
8
–
–
Non assegnato
9
GND
L
LECOM
2102
PC
AIF
ON
12345
Terra per T/R (A), T/R (B) e +5 V
= cavo sistema PC
Installare il software di impostazione
parametri NAiS Motion Control sul proprio
PC.
1. Collegare il modulo di comunicazione
all’interfaccia AIF
2. Collegare il modulo di comunicazione al
PC utilizzando un cavo di sistema PC.
Il modulo di comunicazione è pronto per il
funzionamento quando viene fornita
tensione al circuito principale. Ora è
possibile comunicare con il drive, il che
significa che i parametri possono essere
impostati o letti.
NOTA
L’inverter ha un doppio isolamento di base conformemente a
EN50178. Non è necessario un ulteriore isolamento del circuito.
Note su cavi PC
LIYCY 4 x 0.25 mm2 schermato
≤ 100 W/km
≤ 140 nF/km
Specifiche cavi per
interfaccia RS232
Tipo di cavo
Resistenza cavo
Capacità per unità di
lunghezza cavo
Specifiche per
connettore SubD
Utilizzare esclusivamente involucri in metallo SubD.
Collegare entrambe le estremità dello schermo all’involucro.
Distribuzione pin
Collegamento a PC o simile
Collegamento al modulo di comunicazione
Pin a innesto 9 poli
SubD
Matsushita Electric Works Italia
2 (RxD)
3 (TxD)
5 (GND)
pin zoccolo 9 poli
SubD
pin zoccolo 25 poli
SubD
3 (TxD)
2 (RxD)
5 (GND)
2 (TxD)
3 (RxD)
7 (GND)
4 – 13
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
4.2.2.4
Impostazione parametri
Utilizzando il modulo RS232C/RS485 è possibile accedere a tutti i codici:
•
Codici inverter (tabella codici: vedere pagina A – 3 segg).
– Questi codici vengono memorizzati automaticamente come
dati non volatili.
– Eccezione: Dati di processo, come parole di controllo o
valori di riferimento.
•
4.2.2.5
Codici specifici del modulo (accesso soltanto tramite modulo di
comunicazione: vedere pagina tabella seguente).
Ulteriori codici per il modulo RS232C/RS485
Come leggere la tabella dei codici:
Colonna
Codice
Parametri
Importante
4 – 14
Dati
Significato
No.
Numero codice (i codici segnati con “*” sono identici in tutti i set di
parametri).
Nome
Formato COM
Nome del codice
Interpretazione messaggio di risposta:
VH = esadecimale; VD = decimale; VS = stringa ASCII; VO = ott.
Contenuto e significato dei valori dei parametri (neretto = impostazioni
di default)
Possibilità di
impostazione/selezione
Importanti informazioni aggiuntive
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
Codice
No.
Parametri
Nome
C0068* Controllo
di funzio–
namento
IMPORTANTE
Formato Possibilità di impostazione /
COM
selezione
VH
Bit
Assegnazione
3|2|1|0 Numero di errore di TRIP
7|6|5|4
0000
0001
0010
0011
0100
0101
0110
0111
Attribuzione della 10° cifra del numero di
errore COM.
Esempio: TRIP OH (COM no. 50) = 0110 (5)
Errore ultima comunicaz.
Nessun errore
Controllo errore somma
Errore di frame protocollo
Riservato
Numero codice invalido
Valore variabile invalido
Accesso non autorizzato
Elab.messaggio interrotta
da nuovo messaggio
1111 Errore generico
Blocco inverter
(DCTRL1–CINH)
0 Inverter bloccato
1 Inverter attivato
9
Soglia Qmin raggiunta
(PCTRL1–QMIN)
0 non raggiunta
1 raggiunta
8
10
0
1
11
0
1
12
0
1
13
0
1
14
0
1
15
0
1
Direzione di rotazione
(NSET1/CW/CCW)
rotazione in senso orario
rotazione in senso
antiorario
Inibizione impulsi
(DCTRL1–IMP)
Uscite potenza inibite
Uscite potenza attivate
Arresto rapido
(DCTRL1–QSP)
non attivo
attivo
Raggiungimento limite
Imax (MCTRL1–IMAX)
(C0014 = –5–: Valore
riferimento coppia)
non raggiunto
raggiunto
Valore di riferimento
frequenza raggiunto
(MCTRL1–RFG1=NOUT)
errato
corretto
Messaggio errore di TRIP
(DCTRL1–TRIP)
non attivo
attivo
continua
Matsushita Electric Works Italia
4 – 15
Impostazione parametri
4.2
Impostazione parametri con moduli comunicazione
Codice
Parametri
No.
Nome
C0248
Selezione
ingresso
COM
VD
VS
C1920
VD
C1922
C1923
4 – 16
Controllo
comuni–
cazione di
risposta
Tempo di
controllo
0000 ... 0255
• . C0248 determina il sottocodice (elemento
di array) cui accedere.
C1810* Etichetta–
tura SW
C1811* Creazione
SW
Tempo di
risposta
abbreviato
0
• . L’accesso a codici senza sottocodici
VD
Avvio
status
IMPORTANTE
Formato Possibilità di impostazione /
COM
selezione
C0249* Banca
codici
COM
C1921
VF–CE Compatti
Banca
codici
Codici indirizzabili
0
0000 ... 0255
1 0250 ... 0505
2 0500 ... 0755
3 0750 ... 1005
4 1000 ... 1255
5 1250 ... 1505
6 1500 ... 1755
7 1750 ... 2005
8 2000 ... 2255
9 2250 ... 2505
10 2500 ... 2755
11 2750 ... 3005
12 3000 ... 3255
13 3250 ... 3505
14 3500 ... 3755
15 3750 ... 4005
Struttura: 33S2102I_xy000
VS
VD
VD
quando C0248 > 0 causa il trip in quanto
l’indirizzo non esiste.
• . C0248 è impostato su 0 ogni volta che
viene attivata l’unità.
• . Con la banca dei codici, al numero di
codice viene aggiunto un offset di 250.
• . C0249 è impostato su 0 ogni volta che
viene attivata l’unità.
Versione software (x = versione principale, y =
versione secondaria)
Data di creazione del software
0
QSP (arresto rapido)
Il drive è impostato su “QSP” dopo
l’attivazione del circuito.
1
CINH (blocco inverter)
0
Non attivo
1
attivo
Il drive è impostato su “CINH” dopo
l’attivazione del circuito.
Scrivere C0040 =1 ⇒ abilitato
C1921 = 1:
• . Un messaggio di testo (invio) viene
controllato per errori di trasmissione solo:
– per tutti i messaggi senza errore, viene
inviata una ricevuta positiva (ACK);
ricevuta negativa (NAK) per tutti gli altri.
– solo ora il valore è trasmesso all’inverter.
• . Non c’è alcuna garanzia che l’inverter abbia
correttamente ricevuto il valore.
• . E’ possibile comunicare di nuovo con il
modulo dopo 50 ms.
0
Non attivo
1
CINH (blocco inverter)
2
50
{ms}
• . C1922 e C1923 permettono di controllare la
linea di comunicazione con il dispositivo
collegato.
• . Se l’ospite non invia un messaggio al
QSP (arresto rapido)
modulo di comunicazione entro il tempo
65535
impostato sotto C1923, verrà esegita
l’azione impostata in C1922.
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.2Impostazione parametri con moduli comunicazione
Codice
Parametri
No.
Nome
C1962
No.
codice
esteso
IMPORTANTE
Formato Possibilità di
COM
impostazione/selezione
0 No. errore
Errore interno
1 ID servizio invalida
2 Riconoscimento chiamata
invalido
Errore di applicazione nell’ospite
3 Tipo dati invalido
4 No. sottocodice invalido
5 No. codice invalido
6 Parametro generale
invalido
Errore accesso
7 Condizione operativa,
blocco inverter
8 Modo di funzionamento
C0001 errato
9
10
11
12
Parametri in sola lettura
Generale
Blocco dati troppo lungo
Collisione con altri valori
di parametri
Superamento valore limite
13 Valore oltre il range
14 Violazione generale limite
range
17
32
33
34
35
36
37
38
208
209
210
211
212
213
214
Matsushita Electric Works Italia
Errore generico interno
Generale
Limite tempo superato
Errore di frame
Errore di parità
Overflow
Handshake
Block memory overflow
Errore di frame
Errore di overflow
Controllo errore di somma
nel modulo di
comunicazione
Interruzione messaggio
Dati non validi
Fuori servizio
Errore di parità
Errore interno
Errore di comunicazione modulo di
comunicazione ↔ inverter
Errore di comunicazione inverter ↔ modulo di
comunicazione
4 – 17
Impostazione parametri
4.2
VF–CE Compatti
Impostazione parametri con moduli comunicazione
4.2.2.6
Soluzione di problemi ed eliminazione di errori
Tre LED sul modulo di comunicazione RS232C/RS485 indicano la condizione di
funzionamento del modulo stesso:
LED giallo (RxD)
LED giallo (TxD)
Lampeg– Modulo di comunicazione non
giante
ancora inizializzato
LED verde (Vcc)
Ricezione messaggio in corso
Trasmissione risposta in corso
On
Modulo di comunicazione
collegato all’alimentazione,
nessun errore
–
–
Off
Modulo di comunicazione non
collegato all’alimentazione
Nessuna ricezione di messaggio
Nessuna trasmissione di
messaggio
Errore
Causa
Nessuna
comunicazione
con l’inverter
Inverter spento:
Collegare l’inverter all’alimentazione.
• . Nessuno stato di funzionamento visualizzato
• . Il LED verde Vcc non è acceso
Controllare il collegamento all’inverter.
Modulo di comunicazione non attivo:
• . Il LED verde Vcc non è acceso
Nessuna inizializzazione tra modulo di
comunicazione e inverter
ìIntervento
L’inverter non riceve messaggi
Se il LED giallo RxD non sta lampeggiando:
Test: inviare messaggi ripetuti dall’ospite
• . Controllare il cablaggio all’ospite
(es. con NAIS Motion Control in funzionamento • . Controllare se l’ospite invia messaggi e se
online)
utilizza l’interfaccia appropriata
L’inverter non invia messaggi
Se il LED giallo TxD non sta lampeggiando:
Test: inviare messaggi ripetuti dall’ospite
• . Controllare la velocità di baud rate (C0125)
(es. con NAIS Motion Control in funzionamento
di entrambe le stazioni e se necessario
online)
equilibrarla.
• . Non utilizzare gli indirizzi dell’inverter 00, 10,
…, 90.
Se il LED giallo TxD sta lampeggiando:
• . Controllare il cablaggio all’ospite
L’inverter non
• . L’inverter invia ricevute negative (NAK):
esegue ordini di
– nessun accesso di scrittura a C0044,
Impostare C0001 = 3.
scrittura
C0046, perchè C0001 non è impostato
correttamente.
– tentativo di scrivere in codici di tipo “solo Scrittura generalmente non possibile
lettura“
• . L’inverter invia ricevute positive (ACK):
– inverter usa un set di parametri diversi
4 – 18
Cambiare set di parametri
Matsushita Electric Works Italia
VF–CE Compatti
Impostazione parametri
4.3Impostazione parametri con modulo PROFIBUS AIF
4.3
Impostazione parametri con modulo PROFIBUS AIF
Indicazioni sull’impostazione dei parametri possono essere ricavate dal seguente
manuale:
•
PROFIBUS AIF Module DP Slave – Operating Instructions
ACGM0182END (in lavorazione).
Matsushita Electric Works Italia
4 – 19
Impostazione parametri
4.3
VF–CE Compatti
Impostazione parametri con modulo PROFIBUS AIF
4 – 20
Matsushita Electric Works Italia
Capitolo 5
Libreria funzioni
5.1
5.2
5.3
5.4
Selezione modalità di controllo – Ottimizzazione . . . . . . . . . . . . . . . . . . . . . 5 – 3
5.1.1
Modalità di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 3
5.1.2
Caratteristica V/f . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 6
5.1.2.1 Frequenza nominale V/f . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 6
5.1.2.2 Spunto Vmin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 7
5.1.3
Ottimizzazione del funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 9
5.1.3.1 Compensazione di scorrimento . . . . . . . . . . . . . . . . . . . . . 5 – 9
5.1.3.2 Frequenza portante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 10
5.1.3.3 Attenuazione dell’oscillazione . . . . . . . . . . . . . . . . . . . . . 5 – 11
5.1.3.4 Salti di frequenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 12
5.1.4
Alimentazione del circuito principale, danni al circuito,
blocco dell’inverter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 14
5.1.4.1 Condizioni di avvio / Circuito con ripresa al volo . . . . . 5 – 14
5.1.4.2 Blocco dell’inverter (CINH) . . . . . . . . . . . . . . . . . . . . . . . . 5 – 16
Impostazione dei valori di limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 17
5.2.1
Campo della velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 17
5.2.2
Valori limite della corrente (valori limite Imax ) . . . . . . . . . . . . . . . . . 5 – 18
Accelerazione, decelerazione, frenata, arresto . . . . . . . . . . . . . . . . . . . . . . 5 – 20
5.3.1
Tempi di accelerazione e decelerazione . . . . . . . . . . . . . . . . . . . . . 5 – 20
5.3.2
Arresto rapido (QSP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 22
5.3.3
Cambio direzione di rotazione (CW/CCW) . . . . . . . . . . . . . . . . . . . 5 – 22
5.3.4
Frenatura con freno a iniezione DC (DCB) . . . . . . . . . . . . . . . . . . . 5 – 24
Impostazione valori di riferimento analogici / digitali . . . . . . . . . . . . . . . . . 5 – 26
5.4.1
Selezione valori di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 26
5.4.2
Valori di riferimento analogici via terminale . . . . . . . . . . . . . . . . . . 5 – 27
5.4.3
Valori di riferimento digitali tramite ingresso in frequenza . . . . . . 5 – 30
5.4.4
Valori di riferimento tramite funzione “potenziometro motore” . . 5 – 32
Libreria funzioni
VF–CE Compatti
5.4.5
Valori di riferimento tramite frequenze di JOG . . . . . . . . . . . . . . . . 5 – 34
5.4.6
Valori di riferimento tramite tastiera . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 35
5.4.7
Valori di riferimento tramite sistema di bus . . . . . . . . . . . . . . . . . . . 5 – 36
5.4.8
Commutazione manuale / remoto . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 36
5.5
Inserimento / Rilevamento automatico dati motore . . . . . . . . . . . . . . . . . . 5 – 38
5.6
Controllo di processo, controllo limite di corrente . . . . . . . . . . . . . . . . . . . . 5 – 41
5.7
5.6.1
Controllo PID come controllo di processo . . . . . . . . . . . . . . . . . . . . 5 – 41
5.6.1.1 Selezione valore di riferimento per il controllo
di processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 43
5.6.1.2 Selezione valori effettivi per il controllo di processo . . . 5 –45
5.6.1.3 Disattivazione componente azione integrale
(PCTRL1–I–OFF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 45
5.6.1.4 Disattivazione del controllo di processo
(PCTRL1–OFF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 45
5.6.2
Controllo limite di corrente (controllo Imax ) . . . . . . . . . . . . . . . . . . . 5 – 46
Collegamento di segnali analogici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 47
5.7.1
5.8
5.9
Configurazione segnali di uscita analogici . . . . . . . . . . . . . . . . . . . 5 – 47
Collegamento di segnali digitali, uscita messaggi . . . . . . . . . . . . . . . . . . . . 5 – 50
5.8.1
Configurazione segnali digitali in ingresso . . . . . . . . . . . . . . . . . . . 5 – 50
5.8.2
Configurazione segnali digitali in uscita . . . . . . . . . . . . . . . . . . . . . 5 – 52
Controllo termico del motore, rilevamento errori . . . . . . . . . . . . . . . . . . . . . 5 – 53
5.9.1
Controllo termico del motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 53
5.9.1.1 Controllo l 2 x t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 53
5.9.1.2 Controllo motore PTC / Rilevamento inconvenienti
di terra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 55
5.9.2
Rilevamento errori (DCTRL1–TRIP–SET /
DCTRL1–TRIP–RESET) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 56
5.10 Visualizzazione dei dati operativi, diagnosi . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 57
5.10.1 Valori visualizzati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 57
5.10.2 Diagnosi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 58
5.11 Gestione set di parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 59
5.11.1 Trasferimento set di parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 59
5.11.2 Sostituzione set di parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 61
5.12 Selezione individuale parametri drive: menu utente . . . . . . . . . . . . . . . . . . 5 – 62
5–2
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
5.1
Selezione modalità di controllo – Ottimizzazione
La libreria funzioni fornisce dettagliate informazioni sul modo di adattare l’inverter alle
proprie esigenze applicative.
Suggerimento
La tabella codici elenca tutte le funzioni in ordine numerico e fornisce brevi spiegazioni
(vedere pagina A – 3 segg.).
5.1.1
Modalità di controllo
Codice
No.
Nome
C0014↵ Modalità di
controllo
Impostazioni possibili
Default Selezione
–2–
–2–
Caratteristica V/f controllo V ~ f
–3–
Caratteristica V/f controllo V ~ f2
–4–
–5–
IMPORTANTE
Caratteristica lineare con spunto
costante Vmin
Caratteristica quadratica con
spunto costante Vmin
Per la selezione iniziale con
Controllo vettoriale
C0148, è necessario identificare i
Controllo coppia con limitazione
velocità (vedere pagina A – 3 segg.) parametri del motore, altrimenti
non è possibile avviarlo.
Funzioni
Con C0014 è possibile impostare la modalità di controllo e le caratteristiche di tensione.
E’ possibile inoltre adattare il proprio drive a caratteristiche di carico diverse:
•
•
Caratteristica lineare per drive con coppia di carico costante.
Caratteristica quadratica per drive con coppia di carico in relazione
al quadrato della velocità.
– La caratteristica quadratica V/f è utilizzata principalmente
per azionare pompe centrifughe e ventole. E’ necessario
comunque verificare innanzitutto se la propria pompa o
ventola possa essere attivata con questa modalità di
controllo.
– Se non è possibile sfruttare la caratteristica quadratica V/f
per la propria pompa o ventola, selezionare la modalità di
controllo C0014 = –2– o –4–.
Matsushita Electric Works Italia
5–3
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
Controllo con caratteristiche V/f con spunto Vmin
Selezionare il tradizionale controllo V/f con Vmin di spunto costante (C0016) per il
funzionamento dei seguenti drive:
•
•
•
•
•
•
Applicazione con più motori collegati ad un inverter
Motori AC a riluttanza trifase
Motori trifase AC con scorrimento rotore
Funzionamento di speciali motori con caratteristiche di
frequenza–tensione particolari
Posizionamento con risposta dinamica elevata
Elevatori.
Vuscita
Vuscita
100%
100%
Vmin
Vmin
0
0
0
C0015
Figura 10: C0014 = –2–
Caratteristica lineare
f
0
C0015
f
Figura 11: C0014 = –3–
Caratteristica quadratica (es. pompe, ventole)
Controllo vettoriale
Rispetto al controllo con caratteristiche V/f, il controllo vettoriale presenta una coppia
sensibilmente più elevata e un assorbimento di corrente ridotto nel funzionamento al
minimo. Il controllo vettoriale è un innovativo controllo motore–corrente basato sul
metodo FTC. Selezionare il controllo vettoriale per il funzionamento dei seguenti drive:
•
•
•
•
Singoli drive con carichi variabili
Singoli drive con condizioni di avvio gravose
Applicazioni con più motori dello stesso tipo collegati e uguale
distribuzione del carico
Controllo senza sensori della velocità di motori standard AC trifase
con compensazione scorrimento (C0021).
Controllo di coppia anello aperto con limitazione della velocità
Il valore prefissato (C0005 = –4– o –5–) è riferito al valore della coppia. Non è
necessario un valore effettivo.
Esempio di applicazione sono i drive per avvolgitori.
5–4
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
Controllo vettoriale (C0014 = –4–):
•
•
•
•
E’ assolutamente necessario identificare i parametri.(vedere
pagina 5 – 38)
La modalità di controllo C0014 = –4– deve essere usata soltanto
con compensazione scorrimento (C0021). Così il “controllo di
velocità anello aperto” è ottimizzato per il processo.
La corrente di minima del motore (corrente magnetica) non deve
eccedere la corrente nominale dell’inverter.
La classe di potenza del motore collegato non deve essere
inferiore di oltre due classi alla potenza del motore assegnato
all’inverter.
NOTE
•
•
•
Il passaggio dal controllo V/f al controllo vettoriale deve
essere effettuato esclusivamente quando l’inverter non è
attivo.
Non effettuare applicazioni di controllo di potenza in modalità
“Controllo di coppia” (C0014 = 5)! (vedere pagina 11 – 8)
E’ possibile ottenere eccellenti prestazioni del drive in
applicazioni con controllori di processo, es. controllo velocità
o controllo posizionamento del ballerino con le modalità di
controllo C0014 = 2 o C0014 = 4. Per coppie elevate a velocità
basse, si consiglia la modalità di controllo “Controllo
vettoriale” (C0014 = 4)
Caratteristiche speciali
C0014 = –3–
Intervalli prolungati di inerzia riducono l’accelerazione del drive. Ciò può essere evitato
soltanto cambiando il set dei parametri (es. accelerazione con C0014 = –2–).
C0014 = –4–
Non possibile se
•
•
sono collegati all’inverter drive con carichi diversi
sono collegati all’inverter drive con potenze nominali diverse.
Matsushita Electric Works Italia
5–5
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
5.1.2
Caratteristica V/f
5.1.2.1
Frequenza nominale V/f
Codice
No.
Nome
C0015 Frequenza
nominale V/f
Possibili impostazioni
Default Selezione
50.00
7.50
IMPORTANTE
{0.02 Hz}
960.00 Impostazione valida per tutte le
tensioni del circuito principale
consentite
Funzione con C0014 = –2–, –3–
La frequenza nominale V/f determina la pendenza della curva V/f e influisce
notevolmente sulle caratteristiche di corrente, coppia e potenza del motore.
Funzione con C0014 = –4–
La frequenza nominale V/f influenza i parametri interni del modello del motore quando
si utilizza la modalità “controllo vettoriale”.
Regolazione
C0015 [Hz] +
400 V
@ Frequenza nominale motore [Hz]
V TensioneNominaleMotore [V]
Vuscita
Vuscita
100%
100%
Vmin
Vmin
0
0
0
C0015
Figura 12: C0014 = –2–
Caratteristica lineare
5–6
f
0
C0015
f
Figura 13: C0014 = –3–
Caratteristica quadratica (es. pompe, ventole)
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
Impostazione di C0015
Motore
Tensione Frequenza Collegamento
230/400V 50 Hz
Y
50 Hz
Suggerimenti:
220/380V
50 Hz
Y
52.6 Hz
280/480V
60 Hz
Y
50 Hz
400/690V
400V
50 Hz
50 Hz
∆
50 Hz
230/400V
280/480V
50 Hz
60 Hz
∆
87 Hz
220/380V
50 Hz
∆
90.9 Hz
•motori asincroni 4 poli, funzionanti con frequenza 50 Hz e
collegamento a stella, possono essere azionati in
collegamento a triangolo se eccitati costantemente fino a
87 Hz.
– Ciò aumenta la corrente e la potenza del motore di un
fattore pari a √3 = 1.73.
– Il campo di indebolimento inizia solo oltre 87 Hz.
•Vantaggi:
– Range di impostazione di velocità più ampio
– Potenza di uscita superiore del 73 % rispetto ai motori
standard.
•In teoria questo metodo è utilizzabile anche con motori con
numero di poli superiore (6, 8,...).
– Rispettare la velocità di limite meccanico quando si
utilizzano motori asincroni a 2 poli.
NOTE
•
•
5.1.2.2
Una compensazione interna della tensione del circuito
attenua le fluttuazioni del circuito durante il funzionamento.
E’ possibile quindi ignorare queste fluttuazioni quando si
imposta C0015.
L’identificazione dei parametri del motore assegna
automaticamente C0015.
Spunto Vmin
Codice
No.
Nome
C0016 Spunto Vmin
Possibili impostazioni
Default Selezione
→
0.00
IMPORTANTE
{0.2 %}
40.0 → in funzione dell’inverter
Impostazione valida per tutte le
tensioni del circuito principale
consentite
Funzione con caratteristiche di controllo V/f C0014 = –2–, –3–
Durante la fase di spunto del motore, finchè non è raggiunta la frequenza nominale, è
possibile ottimizzare le prestazioni della coppia dell’inverter con il controllo V/f
impostando C0014 = –2–, –3–.
Matsushita Electric Works Italia
5–7
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
Regolazione
E’ assolutamente necessario adattare C0016 al motore asincrono. Diversamente il
motore potrebbe essere danneggiato dalla temperatura eccessiva oppure l’inverter
potrebbe funzionare con una corrente troppo elevata.
Procedimento:
1.
Funzionamento motore al minimo a frequenza di
scorrimento (f 9 5 Hz)
Calcolo della frequenza di scorrimento:
fs + fN @
nNsin +
2.
nNsin * nN
n Nsin
fN @ 60
p
fs
Frequenza di scorrimento
fnom
Frequenza nominale come da targhetta motore [Hz]
nnomsin
Velocità motore sincrono [min–1]
nnom
Velocità nominale come da targhetta motore [min–1]
p
Numero coppie di poli
Aumento Vmin fino a raggiungere la corrente del motore
successivo
Motore funzionante in brevi periodi a 0 Hz ≤ f ≤ 25 Hz:
motori autoventilati: Imotore ≤ Inom motore
motori a ventilazione forzata: Imotore ≤ Inom motore
Motori con funzionamento continuo a 0 Hz ≤ f ≤ 25 Hz:
motori autoventilati: Imotore ≤ 0.8 Inom motore
motori a ventilazione forzata: Imotore ≤ Inom motore
NOTE
Per la regolazione attenersi alle caratteristiche termiche a basse
frequenze del motore asincrono collegato:
•
•
è stato riscontrato che il funzionamento a intervalli con
corrente nominale è possibile per motori asincroni standard
con classe di isolamento B in un campo di frequenza
0 Hz 3 f 3 25 Hz.
rivolgersi al produttore del motore per l’impostazione esatta
della corrente massima consentita con campo di frequenze
basso nei motori autoventilati.
Funzione per controllo vettoriale o controllo di coppia C0014 = –4–, –5–
Vmin non è effettivo.
5–8
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
5.1.3
Ottimizzazione del funzionamento
5.1.3.1
Compensazione di scorrimento
Codice
Possibili impostazioni
No.
Nome
Default Selezione
C0021 Compensazione
scorrimento
0.0
–50.0
{0.1 %}
50.0
Funzione
Con il carico la velocità di una macchina asincrona si riduce. Questa caduta di velocità
dovuta al carico è chiamata scorrimento. Lo scorrimento può essere compensato
parzialmente impostando adeguatamente C0021. La compensazione di scorrimento
è applicabile in tutte le modalità di controllo (C0014).
•
Aumento dello scorrimento con C0021 < 0 (se C0014 = –2–, –3–)
– Funzionamento più regolare del drive se si verificano ampi
sbalzi di carichi e in applicazioni con più motori.
•
Nel campo di frequenza 5 Hz ... 50 Hz (87 Hz) lo scostamento
dalla velocità nominale è ≤ 0.5 % (valore guida). L’errore aumenta
in operazioni che diminuiscono il campo magnetico.
Regolazione
Procedimento:
1.
s+
Impostazione approssimativa con i dati del motore:
n Nsin * nN
@ 100 %
nNsin
nNsin +
2.
fN @ 60
p
s
nnomsin
nnom
fnom
p
Scorrimento costante (C0021) [%]
Velocità motore sincronico [min–1]
Velocità nominale come da targhetta motore [min–1]
Frequenza nominale come da targhetta motore [Hz]
No. coppie di poli (1, 2, 3, ...)
Impostazione precisa della compensazione di
scorrimento:
Correggere C0021 finchè non si verificano cadute di velocità dovute al
carico nel range di velocità desiderato tra funzionamento al minimo e
carico massimo del motore.
ESEMPIO
nNsin + 50Hz @ 60 + 1500 min*1
2
s+
1500 min*1 *1435 min*1
@ 100 % + 4.33 %
1500 min*1
C0021 = 4.3 % della preselezione
continua
Matsushita Electric Works Italia
5–9
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
NOTE
•
•
•
5.1.3.2
Se il valore di C0021 è troppo elevato, si verifica un eccesso di
compensazione e il drive diventa instabile.
Impostare C0021 = 0.0 per controllo di velocità con controllo
di processo interno.
L’identificazione dei parametri del motore con C0148 assegna
automaticamente C0021.
Frequenza portante
Codice
Possibili impostazioni
No.
Nome
Default Selezione
C0018↵ Frequenza portante
–2–
C0144↵ Diminuzione
frequenza portante
–1–
–0–
–1–
–2–
–3–
–0–
–1–
2 kHz
4 kHz
8 kHz
16 kHz
Nessuna diminuzione della frequenza portante
Diminuzione automatica della frequenza portante
a ϑmax – 5 °C
Funzione C0018
Usare questa funzione per impostare la frequenza portante dell’inverter. La frequenza
portante di default è 8 kHz. Motivi per impostare altri parametri potrebbero essere:
•
2 kHz, 4 kHz:
– Funzionamento più regolare a basse frequenze di uscita.
•
16 kHz:
– Riduzione della rumorosità del motore collegato
– Buona corrente sinusoidale del motore per applicazioni
con frequenze di uscita > 150 Hz, es. drive con frequenza
media.
NOTE
Con una frequenza portante di 16 kHz, il sistema è soggetto a
elevate perdite di potenza che devono essere compensate
diminuendo la corrente di uscita. (vedere pagina 1 – 5 ).
5 – 10
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
Funzione C0144
•
C0144 = –0–
– Se la frequenza portante è 8 kHz o 16 kHz e se la
temperatura scende al di sotto del livello minimo
consentito (ϑmax ), l’inverter verrà inibito, apparirà un
messaggio di TRIP e il motore si arresterà.
•
C0144 = –1– (diminuzione automatica frequenza portante):
– Se la frequenza portante è 8 kHz o 16 kHz e se la
temperatura scende al di sotto del livello minimo
consentito ϑmax – 5 °C, la frequenza portante si riduce
automaticamente a 4 kHz e il funzionamento continua.
– Dopo che la temperatura è rientrata nei livelli consentiti,
l’inverter aumenta nuovamente la frequenza di portante.
NOTE
•
•
Il limite di corrente C0022/C0023 non viene automaticamente
influenzato dalla frequenza portante selezionata.
In base alla corrente assorbita dal motore, la frequenza
portante si imposta automaticamente al suo valore ottimale
per assicurare un funzionamento senza problemi.
– La rumorosità sarà diversa.
– La funzione non può essere variata dall’utente.
5.1.3.3
Attenuazione dell’oscillazione
Codice
No.
Nome
C0079 Attenuazione
oscillazione
Possibili impostazioni
Default Selezione
→
Matsushita Electric Works Italia
0
IMPORTANTE
{1}
80 → in funzione dell’inverter
5 – 11
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
Funzione
•
Soppressione di oscillazioni senza carico quando:
– potenza nominale dell’inverter e potenza nominale del
motore non corrispondono, es. funzionamento con elevata
frequenza portante e diminuzione della potenza relativa
– si utilizzano motori con maggior numero di poli
– si utilizzano motori speciali.
•
Compensazione di risonanze nel drive: alcuni motori asincroni
possono evidenziare a volte questa caratteristica ad una frequenza
di uscita di ca. 20 Hz ... 40 Hz. Il drive può diventare instabile
(variazioni di corrente e velocità).
Regolazione
Procedimento:
1.
Accostarsi all’area di oscillazioni della velocità.
2.
Ridurre le oscillazioni variando C0079 un po’ alla volta.
Indicazione di un funzionamento regolare possono
essere una corrente uniforme di motore o la riduzione di
vibrazioni meccaniche sull’attuatore.
NOTE
Compensare le risonanze in operazioni a velocità controllata
tramite adeguati parametri del controllo di velocità.
5.1.3.4
Salti di frequenza
Codice
No.
Nome
C0625* Salto di
frequenza 1
C0626* Salto di
frequenza 2
C0627* Salto di
frequenza 3
C0628* Ampiezza del
salto di
frequenza
5 – 12
Possibili impostazioni
Default Selezione
IMPORTANTE
480.00
0.00
{0.02 Hz}
480.00
480.00
0.00
{0.02 Hz}
480.00
480.00
0.00
{0.02 Hz}
480.00
0.00
0.00
{0.01 %}
100.00 Valido per C0625, C0626,
C0627
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
Funzione
In presenza di certe frequenze di uscita si possono verificare risonanze meccaniche
(es. ventola). I salti di frequenza sopprimono queste frequenze di uscita indesiderate.
L’ampiezza del salto di frequenza (f) determina il campo di soppressione della
frequenza.
Con un salto di frequenza di 480.00 Hz, questa funzione non è attiva.
La funzione è localizzata nel blocco NSET1 prima del generatore della funzione di
rampa.
Regolazione
•
•
Impostare i salti di frequenza richiesti con C0625, C0626, C0627.
C0628 definisce l’ampiezza dei salti di frequenza. Calcolo
dell’ampiezza (∆f) del corrispondente salto di frequenza:
Df [Hz] + f s [Hz] @
fs
C0628 [%]
100 %
Salto di frequenza
NOTE
•
•
I salti di frequenza influenzano esclusivamente il valore di
riferimento principale.
C0625, C0626, C0627, C0628 sono identici in tutti i set di
parametri.
f2
C0625
C0628
Df
C0626
C0628
Df
C0627
C0628
Df
f1
Figura 14: Salti di frequenza e relative ampiezze (nf)
Matsushita Electric Works Italia
5 – 13
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
5.1.4
Alimentazione del circuito principale, danni al circuito, blocco
dell’inverter
5.1.4.1
Condizioni di avvio / Circuito con ripresa al volo
Codice
No.
Possibili impostazioni
Nome
C0142↵ Condizione di
avvio
Default
–1–
IMPORTANTE
Selezione
–0–
–1–
–2–
–3–
Avvio automatico inibito
Circuito ripresa al volo non attivo
Avvio automatico se X3/28 = CHIUSO
Circuito ripresa al volo non attivo
Automatic start inhibited
Circuito ripresa al volo attivo
Avvio automatico se X3/28 = APERTO
Circuito ripresa al volo attivo
Parte dopo che su X3/28 il
segnale cambia da basso a alto
Parte dopo che su X3/28 il
segnale cambia da basso a alto
Funzione
Determina il comportamento dell’inverter dopo il collegamento al circuito principale, la
riconnessione in seguito ad errori o il riavvio dopo un blocco dell’inverter (CINH). Con
il circuito di ripresa al volo, l’inverter si sincronizza automaticamente con la velocità del
motore. L’inverter calcola la frequenza di uscita richiesta per la velocità corrente del
motore, poi l’inverter viene collegato e fa accelerare il motore fino al valore di riferimento
selezionato. Vantaggio: accelerazione e decelerazione continue e regolari.
Prestazioni del drive
•
Opzioni di avvio con circuito a ripresa al volo
– C0142 = –0–
Dopo l’interruzione del circuito, il drive non si avvia prima
di un cambiamento del segnale APERTO/CHIUSO
all’ingresso CINH (X3/28).
– C0142 = –1–
Dopo l’interruzione del circuito, il drive si avvia
automaticamente se un segnale CHIUSO è applicato
all’ingresso CINH (X3/28). Allo stesso tempo l’inverter
imposta tutti gli integratori su zero e li riabilita di nuovo.
•
Opzioni di avvio con circuito a ripresa al volo
– C0142 = –2–
Avvio con circuito a ripresa al volo dopo un cambiamento
del segnale APERTO/CHIUSO all’ingresso CINH (X3/28).
– C0142 = –3–
Avvio automatico con circuito a ripresa al volo se un
segnale CHIUSO è applicato all’ingresso CINH (X3/28).
5 – 14
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.1Selezione modalità di controllo – Ottimizzazione
NOTE
•
•
•
•
Il circuito a ripresa al volo non deve essere utilizzato se
all’inverter sono collegati vari motori con inerzia diversa.
Il circuito a ripresa al volo ricerca solamente la direzione di
rotazione selezionata per la sincronizzazione.
La ripresa al volo funziona affidabilmente nei drive con elevati
momenti di inerzia.
Macchine con bassi intervalli di inerzia e attrito: dopo che
l’inverter è stato abilitato, il motore può avviarsi o ripartire da
uno stato di riposo in breve tempo.
Suggerimento
Se il circuito di ripresa al volo non è richiesto per ogni
avvio del drive, ma solo dopo la riconnessione al circuito
principale:
•
•
Chiudere il contatto X3/28 con un
segnale CHIUSO ed avviare l’inverter
con la funzione “QSP” (C0142 = –3–).
Ora il circuito di ripresa al volo è
attivato esclusivamente per il primo
collegamento al circuito principale.
Matsushita Electric Works Italia
5 – 15
Libreria funzioni
5.1
VF–CE Compatti
Selezione modalità di controllo – Ottimizzazione
5.1.4.2
Blocco dell’inverter (CINH)
Non utilizzare il blocco dell’inverter (CINH) per funzioni di stop
di emergenza. Il CINH blocca l’uscita di potenza, ma non
scollega l’inverter dal circuito principale.
!
Funzione
Inibizione dell’uscita di potenza:
•
•
•
Il drive gira al minimo senza coppia.
Tastiera display di stato: (inibizione impulsi)
Il LED verde sull’inverter lampeggia.
Attivazione
•
•
Contatto APERTO a X3/28
Se C0469 = 1: premere . riavviare con .
NOTE
•
•
X3/28 e si comportano secondo la logica AND.
Il restart comincia con una frequenza di uscita di 0 Hz. Se il
drive è ancora in movimento e il circuito di ripresa al volo non
è attivato (C0142), si può verificare un sovraccarico
rigenerativo.
Suggerimento
L’inverter può essere abilitato e disabilitato anche con
C0040 o può esserne letto lo stato.
5 – 16
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.2 Impostazione dei valori di limite
5.2
5.2.1
Impostazione dei valori di limite
Campo della velocità
Codice
No.
Nome
C0010 Frequenza
uscita
minima
C0011 Frequenza
uscita
massima
Possibili impostazioni
Default Selezione
0.00
0.00
IMPORTANTE
{0.02 Hz}
480.00 C0010 non valido se
C0034 = –2–.
50.00
7.50
{0.02 Hz}
480.00
Funzione
Il campo della velocità richiesto dall’applicazione può essere impostato selezionando
le frequenze di uscita:
•
•
C0010 corrisponde alla velocità a 0 % della selezione del valore di
riferimento di velocità.
C0011 corrisponde alla velocità a 100 % della selezione del valore
di riferimento di velocità.
Regolazione
Relazione tra frequenza di uscita e velocità sincronica del motore:
@ 60
nnominale + C0011
p
nnomsin
Velocità motore sincronico [min–1]
C0011
Max. frequenza uscita [Hz]
p
No. coppie di poli (1, 2, 3, ...)
ESEMPIO
p = 2, C0011 = 50 Hz
nnominale + 50 @ 60 + 1500 min*1
2
continua
Matsushita Electric Works Italia
5 – 17
Libreria funzioni
5.2
VF–CE Compatti
Impostazione dei valori di limite
NOTE
•
•
•
•
Se C0010 > C0011, l’impostazione è limitata a C0011.
Se i valori di JOG sono utilizzati per la selezione di valori di
riferimento, C0011 agisce come limitazione.
C0011 è un valore di normalizzazione interna. Effettuare
variazioni complesse solo in caso di blocco dell’inverter.
Rispettare la velocità massima del motore!
[f]
C0011
C0010
0%
100 %
Caratteristiche speciali
Per frequenze di uscita > 300 Hz: evitare frequenze di chopper < 8 kHz.
5.2.2
Valori limite della corrente (valori limite Imax)
Codice
No.
Nome
Possibili impostazioni
Default Selezione
IMPORTANTE
C0022 Limite Imax
(modalità motore)
150
30
{1 %}
150
C0023 Limite Imax in
modalità
generatore
150
30
{1 %}
150 C0023 = 30 %: Funzione non
attiva se C0014 = –2–, –3–
Funzione
Gli inverter sono dotati di un controllo della corrente di limite che determina il
comportamento dinamico sotto carico. Il carico misurato è confrontato con i valori di
limite impostati in C0022 per carichi motore e in C0023 per carichi generatore. Se il
limite della corrente viene superato, il funzionamento dinamico dell’inverter cambierà.
C0023 = 30 % :
•
•
5 – 18
Inverter con limite corrente non attivo in modalità generatore (solo
in modo controllo caratteristiche V/f C0014 = –2–, –3–, vedere
pagina 5 – 3 ).
Utile in applicazioni con motori asincroni di media frequenza
quando non è affidabile il riconoscimento della modalità di
funzionamento del motore.
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.2 Impostazione dei valori di limite
Regolazione
•
•
Impostare i tempi di accelerazione e decelerazione in modo che il
drive possa seguire il profilo della velocità senza raggiungere Imax
dell’inverter.
Fare attenzione alla riduzione di corrente a frequenza portante di
16 kHz (vedere pagina 1 – 5 ).
Caratteristiche del drive al raggiungimento del valore limite
•
Durante l’accelerazione:
– aumento della rampa di accelerazione.
•
Durante la decelerazione:
– aumento della rampa di decelerazione.
•
Con carico crescente e velocità costante:
– al raggiungimento del valore limite di corrente di motore:
Riduzione della frequenza di uscita a 0 Hz.
– al raggiungimento del limite della corrente del generatore:
Aumento della frequenza di uscita alla frequenza massima
(C0011).
– arresto della variazione della frequenza di uscita se il
carico scende al di sotto del valore limite.
– se viene generato un carico improvviso all’albero del
motore (es. il drive è bloccato), si può attivare la
soppressione di sovracorrente (messaggio di errore OCX).
•
C0023 = 30 % e C0014 = –2–, –3–:
– sovraccarichi di motore e generatore (C0054 > C0022):
riduzione della frequenza di uscita a 0 Hz.
– arresto della variazione della frequenza di uscita se il
carico scende al di sotto del valore limite.
NOTE
•
•
In modalità generatore, la corrente può essere controllata
correttamente solo se è collegata una resistenza di frenatura.
C0022 e C0023 si riferiscono alla corrente nominale di uscita
con una frequenza di chopper di 8 kHz (vedere pagina 1 – 5 ).
Matsushita Electric Works Italia
5 – 19
Libreria funzioni
5.3
VF–CE Compatti
Accelerazione, decelerazione, frenata, arresto
5.3
5.3.1
Accelerazione, decelerazione, frenata, arresto
Tempi di accelerazione e decelerazione
Codice
No.
Nome
Possibili impostazioni
Default Selezione
IMPORTANTE
C0012 Valore riferimento
principale tempo
accelerazione
5.00
0.00
{0.02 s}
1300.00 vedere Funzione
C0013 Valore riferimento
principale tempo
decelerazione
5.00
0.00
{0.02 s}
1300.00 vedere Funzione
Funzione
Tempi di accelerazione e decelerazione determinano la risposta del drive dopo il
cambiamento di un valore di riferimento.
Il valore di riferimento principale corrisponde alla somma dei valori memorizzati dai
codici C0046 e C0140. L’uscita in frequenza dell’inverter, a sua volta, è la somma del
valore di riferimento principale e del valore di C0049.
Uscita in frequenza dell’inverter = C0046 + C00140 + C0049.
Se i valori di C0046 e C0140 cambiano, i tempi di accelerazione e decelerazione
vengono calcolati sulla base di C0012 e C0013; se il valore di C0049 cambia, il tempo
di accelerazione / decelerazione è sempre 5 secondi, indipendentemente dalla
variazione nel codice.
Regolazione
•
•
Tempi di accelerazione e decelerazione si riferiscono al
cambiamento della frequenza di uscita da 0 Hz alla frequenza
massima di uscita impostata con C0011.
Calcolare i tempi Tinom e Tif, che si fissano con C0012 e C0013.
– tinom e tif sono i tempi necessari per passare da f1 a f2:
Tinom + tinom @ C0011
f2 * f1
5 – 20
Tif + tif @ C0011
f2 * f1
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.3Accelerazione, decelerazione, frenata, arresto
NOTA
In condizioni operative difficili, tempi troppo brevi di
accelerazione e decelerazione possono determinare la
disattivazione dell’inverter con l’indicazione di TRIP OC5. In
questi casi è necessario fissare tempi di accelerazione e
decelerazione sufficienti perchè il drive possa seguire il profilo
della velocità senza raggiungere Imax dell’ inverter.
f [Hz]
C0011
f2
f1
0
Matsushita Electric Works Italia
t
tinom
tif
Tinom
Tif
5 – 21
Libreria funzioni
5.3
VF–CE Compatti
Accelerazione, decelerazione, frenata, arresto
5.3.2
Arresto rapido (QSP)
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0105 Tempo di
decelerazione
QSP
5.00
0.00
IMPORTANTE
{0.02 s}
1300.00 QSP = Arresto rapido
Funzione
L’arresto rapido fa decelerare il drive fino all’arresto in base al tempo di decelerazione
impostato in C0105.
Attivazione
• C0007 = –14– ... –22–, –34–, –47–:
Contatto APERTO a X3/E3 e X3/E4
Contatto CHIUSO a X3/E3 e X3/E4 commutando il circuito
principale
• C0007 = –46–, –49–:
Contatto APERTO a X3/E2
•
•
•
C0007 = –2–, –4–, –8–, –9–, –13–, –30–, –31–, –32–, –36–,
–37–, –40–, –43–, –45–:
Contatto APERTO a X3/E3
C0007 = –33–, –42–:
Contatto APERTO a X3/E4
C0469 = 2 e C0001 = 3:
L’inverter non si avvia automaticamente anche se alimentato e con
l’ingresso AIN1 presente.
NOTE
•
•
5.3.3
L’arresto rapido è valido per il valore di riferimento principale
e per quelli aggiuntivi.
L’arresto rapido non influisce sul controllo di processo.
Cambio direzione di rotazione (CW/CCW)
Funzione
Cambia la direzione di rotazione del motore tramite segnali di controllo digitali (CW /
CCW). Il tempo necessario per questa commutazione dipende dai tempi di rampa
impostati per il valore di riferimento principale (tempo di decelerazione C0013, tempo
di accelerazione C0012).
5 – 22
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.3Accelerazione, decelerazione, frenata, arresto
Cambio della direzione di rotazione – senza controlli di sicurezza
Attivazione
C0007 = –0– ... –13–, –23–, –43–, –45–: Cambio tramite X3/E4.
Se l’inverter è collegato nella corretta sequenza di fasi e gli ingressi sono attivi, con un
contatto APERTO si genera un campo di rotazione orario, con un contatto CHIUSO si
genera un campo di rotazione antiorario.
NOTE
•
•
Il drive può invertire la direzione di rotazione in caso di errore
della tensione di controllo o di circuito aperto.
Variazione rotazione CW/CCW solo nel valore di riferimento
principale.
Cambio della direzione di rotazione – con controlli di sicurezza
Attivazione
C0007 = –14– ... –22–, –34–, –47–: Cambio della direzione di rotazione con sicurezza
tramite X3/E3, X3/E4.
Se l’inverter è collegato nella corretta sequenza di fasi e gli ingressi sono attivi, si
verifica quanto segue:
Funzione
Segnale di origine
Contatto per CW/QSP
Contatto per CCW/QSP
Rotazione CCW
APERTO
CHIUSO
Rotazione CW
CHIUSO
APERTO
Arresto rapido
APERTO
APERTO
Invariata
CHIUSO
CHIUSO
NOTE
•
•
•
Contatto CHIUSO in CW/QSP e CCW/QSP: la direzione di
rotazione sarà quella del segnale attivato per primo.
Contatto APERTO commutando il circuito principale in
CW/QSP e CCW/QSP: l’inverter attiva l’arresto rapido (QSP).
Variazione CW/CCW solo nel valore di riferimento principale.
Matsushita Electric Works Italia
5 – 23
Libreria funzioni
5.3
VF–CE Compatti
Accelerazione, decelerazione, frenata, arresto
5.3.4
Frenatura con freno a iniezione DC (DCB)
Codice
No.
Nome
Possibili impostazioni
Default Selezione
IMPORTANTE
C0036 Tensione
DCB
→
0
{0.02 %}
150 % In funzione dell’inverter
Riferimento Mnom, Inom
C0019 Soglia DCB
automatico
0.10
0.00
{0.02 Hz}
480.00 •Definisce a quale valore di frequenza la
funzione DCB viene eseguita
automaticamente
•Il DCB automatico avviene solamente:
– se, mentre si cambia il valore di
riferimento della frequenza, questo
scende al di sotto del valore
impostato con C0019
– lungo la rampa QSP di
decelerazione quando il valore di
riferimento della frequenza scende
al di sotto del valore impostato con
C0019
C0106 Tempo di
0.50
mantenimento
DCB
automatico
0.00
{0.01 s}
999.00 •Determina la durata della funzione di
DCB automatico
•0.00 s = DCB automatico non attivo
999.00 s = ∞
Funzione
La frenatura a iniezione DC permette una rapida decelerazione del drive fino allo stato
di riposo senza ricorrere a resistori di freno esterni.
•
•
La coppia del freno è più bassa che nella frenatura in modalità
generatore con resistore di freno esterno.
Max. coppia freno: ca. 20 % ... 30 % della coppia nominale motore.
E’ possibile preselezionare la tensione del freno.
Regolazione
Procedimento:
1.
Indicare con C0036 una percentuale per la tensione di
frenata.
2.
Scegliere il modo di attivazione del freno a iniezione DC:
– tramite segnali di ingresso digitali (configurazione con C0007)
– automaticamente quando il valore scende sotto la soglia di C0019
(condizione: C0106 > 0.00 sec.).
5 – 24
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.3Accelerazione, decelerazione, frenata, arresto
Attivazione tramite segnale di ingresso
Con ingressi attivi:
Codice
C0007
Contatti chiusi su
Funzione
–17–
X3/E1
DCB è attivo finchè X3/E1 = APERTO
–3–, –7–, –14–. 19
X3/E2
DCB è attivo finchè X3/E2 = APERTO
–0–, –5–, –11–, –25–, –29–, –41–,
–42–, –48–
X3/E3
DCB è attivo finchè X3/E3 = APERTO
–31–, –36–, –51–
X3/E4
DCB è attivo finchè X3/E4 = APERTO
Trascorso il tempo di mantenimento (C0106), l’inverter si blocca (visualizzazione sulla
tastiera: ).
Attivazione automatica
Procedimento:
1.
Selezionare un tempo di mantenimento > 0.00 s in C0106
Il freno automatico DC a iniezione rimane attivo per il tempo
impostato. Trasorso questo, l’inverter si blocca (CINH).
2.
Impostare il valore di soglia in C0019
La soglia indica il momento di attivazione del freno a iniezione DC.
NOTE
•
•
•
La corrente DC del motore è impostata indirettamente con
C0036 (ref. alla tensione nominale dell’inverter).
Operazioni prolungate ed eccessiva corrente DC del motore
possono surriscaldare il motore collegato!
Con C0019 è possibile impostare una banda morta per il
valore di riferimento.
Impostare C0019 = 0.00 sec. per essere sicuri che il freno a
iniezione DC non si attivo.
Matsushita Electric Works Italia
5 – 25
Libreria funzioni
5.4
VF–CE Compatti
Impostazione valori di riferimento analogici / digitali
5.4
5.4.1
Impostazione valori di riferimento analogici / digitali
Selezione valori di riferimento
Segnali analogici
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0001 Selezione valore
↵ di riferimento
(modalità di
funzionamento)
–0–
–0–
–1–
–2–
–3–
IMPORTANTE
•Valido per C0001 = 0 ... 3:
Il controllo simultaneo tramite
terminali e PC/tastiera è
sempre possibile.
Selezione valore di riferimento
tramite tastiera o canale parametri di •C0001 = 3 deve essere
impostato per la selezione del
un modulo bus AIF
valore di riferimento tramite
un canale elaborazione dati
Selezione valore di riferimento
di un modulo bus AIF!
tramite AIN1 (X3/8)
Diversamente i dati di
processo non verranno
valutati.
Selezione valore di riferimento
tramite un canale elaborazione dati •I moduli bus sono il modulo
di un modulo bus AIF
PROFIBUS AIF e il modulo di
comunicazione RS232/485.
Selezione valore di riferimento
tramite AIN1 (X3/8)
Funzione
•
•
•
C0001 = –1–: Fonte del valore di riferimento è il canale di parametri
dell’AIF (Automation Interface).
C0001 = –3–: Fonte del valore di riferimento è il canale di
elaborazione dati dell’AIF.
C0001 = –0–, –2–: Fonte del valore di riferimento è il terminale AIN1.
NOTE
•
•
•
5 – 26
Cambiando le impostazioni di C0001 = –0–, –1– o –2–, il drive
si può attivare dopo che l’inverter è stato abilitato.
C0001 = 3 deve essere impostato per la selezione del valore di
riferimento tramite un canale elaborazione dati di un modulo
bus AIF! Diversamente i dati di processo non verranno
valutati.
Se C0001 = –3– QSP verrà impostato dopo il collegamento al
circuito principale!
Con PC: QSP può essere resettato con la parola di controllo
C0135, bit 3 = 0.
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.4Impostazione valori di riferimento analogici / digitali
5.4.2
Valori di riferimento analogici via terminale
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0034* Campo
↵ inserimento
valore
riferimento
–0–
C0026* Ingresso offset
analogico1
(AIN1–OFFSET)
0.0
C0027* Ingresso
guadagno
analogico 1
(AIN1–GAIN)
100.0
IMPORTANTE
•Verificare posizione di
0 ... 5 V / 0 ... 10 V / 0 ... 20 mA
commutazione modulo
4 ... 20 mA
funzione!
–10 V ... +10 V
•
•C0034
= –2–:
4 ... 20 mA Controllo circuito aperto
– C0010 non valido
(TRIP Sd5, se I < 4 mA)
–200.0
{0.1 %}
200.0 •Impostazioie per X3/8
•Il limite superiore del campo del
valore di riferimento in C0034
corrisponde al 100%
–0–
–1–
–2–
–3–
–1500.0
{0.1 %}
1500.0 •Impostazione per X3/8
•100.0 % = Guadagno 1
•Selezione punto di riferimento
inverso tramite guadagno e
offset negativi
Funzione
Selezione e regolazione di segnali analogici via terminale come valori di riferimento o
valori effettivi.
Attivazione
Selezionare una configurazione adatta all’applicazione con C0005.
Regolazione
Procedimento:
1.
Selezionare il valore di riferimento con C0034.
2.
Impostare il medesimo campo per la posizione di
interruttore e jumper (modulo funzione), altrimenti il
segnale del valore di riferimento non sarà interpretato
correttamente.
Il segnale del valore di riferimento viene valutato solo se è impostato il
campo relativo (C0034), indipendentemente se è fissato o meno il
guadagno.
La frequenza di uscita minima (C0010) corrisponde a 0 % del segnale
del valore di riferimento.
Con offset ≠ 0% e/o valore di riferimento inverso, il valore impostato in
C0010 può non essere raggiunto.
3.
Se necessario, regolare il guadagno (C0027)
Il guadagno agisce sempre contemporaneamente sul segnale del
valore di riferimento e sull’offset.
100 % corrisponde al fattore di guadagno = 1.
4.
Se necessario, regolare il guadagno (C0026).
L’offset aggiusta le caratteristiche (vedere pagina 5 – 28).
Matsushita Electric Works Italia
5 – 27
Libreria funzioni
5.4
VF–CE Compatti
Impostazione valori di riferimento analogici / digitali
Regolazione
Selezione punto di riferimento unipolare
f
Banda morta
C0011
Guadagno > 100%
Offset = 0%, guadagno=100%
Guadagno < 100%
Offset > 0%
0V
0/4 mA
5V
10 V
20 mA
10 kHz
Segnale
valore
di riferimento
Offset < 0%
Selezione punto di riferimento inverso
f
Banda morta
C0011
Offset < –100%
guadagno > –100%
Offset= –100%
guadagno = –100%
0V
0/4 mA
5 – 28
Offset > –100%
guadagno < –100%
5V
10 V
20 mA
10 kHz
Segnale
valore di
riferimento
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.4Impostazione valori di riferimento analogici / digitali
Selezione punto di riferimento bipolare
f
C0011
Offset = 0%
guadagno = 100%
Offset > 0%
Segnale valore
10 V di riferimento
–10 V
Guadagno < 0%
Banda
morta
–C0011
ESEMPIO
Deve essere impostata una banda morta + 2 V (= 20 %) per la
selezione di un valore di riferimento inverso (0 ... +10 V). Con
un segnale crescente del valore di riferimento la frequenza di
uscita deve essere invertita e raggiungere – 30 % ad un valore
di riferimento di + 10 V.
P1 e P2 possono essere punti qualsiasi lungo una linea.
Tener conto del segno del numero.
Calcolare il guadagno
Guadagno [%] +
f (P 2) * f (P 1)
@ 100 %
V (P 2) * V (P 1)
+ * 30 % * 100 % @ 100 %
100 % * 20 %
+ * 162.5 %
Calcolare l’offset
Offset (P2) [%] +
+
f (P2) [%]
@ 100 % * V (P 2) [%]
Guadagno [%]
* 30 % @ 100 % * 100%
* 162.5 %
+ * 81.5 %
Matsushita Electric Works Italia
5 – 29
Libreria funzioni
5.4
VF–CE Compatti
Impostazione valori di riferimento analogici / digitali
f
Banda morta
C0011
(100 %)
0V
(0 %)
P1
+2V
(20 %)
Segnale
valore di
riferimento
+ 10 V
(100 %)
–30 %
P2
NOTA
C0026 e C0027 sono identici in tutti i set di parametri.
5.4.3
Valori di riferimento digitali tramite ingresso in frequenza
Codice
No.
Nome
C0425↵* Configurazione
ingresso
frequenza
canale singolo
X3/E1 (DFIN1)
Possibili impostazioni
Default Selezione
–2–
Frequenza
IMPORTANTE
Risoluzione
–0–
100 Hz
1/200
1s
–1–
1 kHz
1/200
100 ms
–2–
10 kHz
1/200
10 ms
–3–
10 kHz
1/1000
50 ms
–4–
10 kHz
1/10000
500 ms
C0426* Guadagno
ingresso
frequenza
X3/E1 (DFIN1–
GAIN)
100
–1500.0
{0.1 %}
C0427* Offset ingresso
frequenza
X3/E1 (DFIN1–
OFFSET)
0.0
–100.0
{0.1 %}
5 – 30
Velocità
scansione
•“Frequenza” è riferita
Max.
alla normalizzazione
frequenza
interna (es. C0011
etc.)
300 Hz
•“Frequenza
“Frequenza max.” è la
frequenza operativa
3 kHz
max. in funzione di
C0425.
Se il valore di
10 kHz
una impostazione
viene superato, è
10 kHz
possibile regolarlo
proporzionalmente
10 kHz
con C0426:
– Esempio: C0425 =
1500.0
–0–, (300 Hz)
– C0426 = 33.3 %
permette una
corretta valutazione
con C0425 = –0–
•
•Riferimento:
C0011
100.0
•Valido solo se E1 è
configurato come
ingresso frequenza in
C0007 e in C0005
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.4Impostazione valori di riferimento analogici / digitali
Funzione
Scelta e regolazione di una frequenza digitale come valore di riferimento o valore
effettivo.
•
0 Hz ... 10 kHz a X3/E1
Attivazione
Procedimento:
1.
C0007 = –28– ... –45–, –48–, –49–, –50–, –51– configura
X3/E1 come ingresso in frequenza.
2.
Seleziona la configurazione che valuta l’ingresso in
frequenza (C0005 = –2–, –3–, –5–, –6–, –7–).
1.
Inserire la frequenza, la risoluzione e il tempo di
scansione (canale singolo) del segnale del valore di
riferimento (C0425).
2.
Se necessario, regolare il guadagno (C0426). Il
guadagno influisce sempre contemporaneamente sul
segnale del valore di riferimento e sull’offset . 100 %
corrisponde al fattore di guadagno = 1(vedere pagina
5 – 28).
3.
Se necessario, regolare l’offset (C0427). L’offset sposta
la caratteristica (vedere pagina 5 – 28).
Regolazione
Procedimento:
NOTA
Per esigenze di maggiore precisione, selezionare una risoluzione
superiore con C0425 tenendo conto del tempo di scansione.
Matsushita Electric Works Italia
5 – 31
Libreria funzioni
5.4
Impostazione valori di riferimento analogici / digitali
5.4.4
Valori di riferimento tramite funzione “potenziometro motore”
Codice
No.
VF–CE Compatti
Possibili impostazioni
Nome
C0265*↵ Potenziometro
configurazione
motore
IMPORTANTE
Default Selezione
–3–
–0–
Valore iniziale = non alimentato
–1–
Valore iniziale = C0010
–2–
Valore iniziale = 0
–3–
Valore iniziale = non alimentato
QSP, se SU/GIU’ = APERTO
–4–
Valore iniziale = C0010
QSP, se SU/GIU’ = APERTO
–5–
Valore iniziale = 0
QSP, se SU/GIU’ = APERTO
•Valore iniziale: frequenza di
uscita avvicinata con Tir
(C0012) quando si attiva il
circuito principale e si attiva il
potenziometro del motore:
– “Non alimentato” = valore
reale a circuito disattivo
– “C0010”: frequenza uscita
minima da C0010
– “0” = frequenza uscita 0 Hz
•C0265 = –3–, –4–, –5–:
– QSP riduce il potenziometro
del motore lungo la rampa
QSP (C0105)
Funzione
Selezione del valore di riferimento tramite due contatti digitali APERTO/CHIUSO, che
possono essere controllati ad esempio tramite tasti di contatto.
La frequenza di uscita viene modificata tramite i tempi di accelerazione e decelerazione
impostati per il valore di riferimento principale (C0012/C0013).
Attivazione
C0007 = –10–,–11–, –12–, –13–, –21–, –23–, –24–, –25–, –26–, –27–, –44–
Funzione
SU
GIU’
Decelerazione del valore di riferimento a 0 Hz lungo la
rampa QSP (C0105).
APERTO
APERTO
Decelerazione del valore di riferimento alla frequenza di
uscita minima (C0010) lungo la rampa di decelerazione
del valore di riferimento principale (il valore di riferimento
deve prima aver superato C0010)
APERTO
CHIUSO
Accelerare il valore di riferimento alla frequenza di uscita
max. (C0011) lungo la rampa di accelerazione del valore
di riferimento principale (C0012)
CHIUSO
APERTO
Il valore di riferimento rimane costante
CHIUSO
CHIUSO
5 – 32
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.4Impostazione valori di riferimento analogici / digitali
ESEMPIO
Attivazione protetta circuito aperto della funzione
“potenziometro motore” tramite contatti normalmente chiusi
C0007 = –10– ... –13–, –21–, –23– ... –27–
E1 = “GIU’”, E2 = “SU”
E1
E2
E3
E4
20
STOP ¢ APERTO
NOTE
•
•
•
Di solito la funzione “potenziometro motore” richiede
l’impiego di un modulo I/U. E’ comunque possibile
implementarlo utilizzando segnali di bus digitali.
Le frequenze di JOG sono prioritarie rispetto alla funzione
“potenziometro motore” .
Il valore di riferimento viene salvato
– quando si attiva il circuito principale (vedere
C0265),
– quando l’inverter è bloccato (CINH),
– in caso di messaggi di errore.
•
•
C0265 = –3–, –4–, –5–:
Quando si attiva la funzione QSP, il potenziometro del motore
decelera a 0 Hz lungo la rampa QSP (C0105).
Il valore di riferimento supplementare è aggiunto alla funzione
potenziometro motore.
Matsushita Electric Works Italia
5 – 33
Libreria funzioni
5.4
VF–CE Compatti
Impostazione valori di riferimento analogici / digitali
5.4.5
Valori di riferimento tramite frequenze di JOG
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0037 JOG1
C0038 JOG2
C0039 JOG3
20.00
30.00
40.00
–480.00
–480.00
–480.00
IMPORTANTE
{0.02 Hz}
{0.02 Hz}
{0.02 Hz}
480.00 JOG = frequenza di JOG
480.00
480.00
Funzione
E’ possibile salvare e richiamare fino a tre valori di riferimento JOG.
Attivazione
C0007 = –0–...–6–, –9–, –14–, –15–, –16–, –20–, –22–, –28–, –29–, –30–, –35–,
–37– ...–41–, –46–, –47–, –49–, –50–
Inserimento valore
riferimento tramite:
Segnale a
JOG1/3
JOG2/3
altra fonte valore riferimento
APERTO
APERTO
JOG 1
CHIUSO
APERTO
JOG 2
APERTO
CHIUSO
JOG 3
CHIUSO
CHIUSO
NOTE
•
•
•
L’impostazione di C0011 limita la frequenza di uscita anche in
presenza di valori JOG.
L’impostazione di C0010 non è valida quando il valore di
riferimento viene selezionato tramite valori JOG.
I valori JOG sono prioritari rispetto a C0046 (NSET1–N1) e
C0044 (NSET1–N2).
Caratteristiche speciali
Il valore di riferimento supplementare viene aggiunto alle frequenze JOG.
5 – 34
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.4Impostazione valori di riferimento analogici / digitali
5.4.6
Valori di riferimento tramite tastiera
Funzione
E’ possibile selezionare i valori di riferimento tramite tastiera.
Regolazione
Procedimento:
1.
Con o fino a 2.
Impostare il valore di riferimento usando o Se l’inverter è attivo, il valore di riferimento variato influisce
direttamente sul drive.
Il valore di riferimento viene salvato quando l’inverter è bloccato. Dopo
aver abilitato l’inverter, il drive accelera o decelera fino all’ultimo valore
di riferimento.
In C0140 è possibile leggere e impostare il valore di riferimento della
tastiera.
NOTE
•
•
•
•
•
•
I valori di riferimento selezionati tramite tastiera vengono
salvati quando l’inverter viene separato dal circuito o si
interrompe il funzionamento
Il valore di riferimento della tastiera viene aggiunto al valore di
riferimento principale.
La selezione del valore di riferimento tramite influisce su
NSET1–N1 e NSET1–N2.
E’ possibile selezionare separatamente valori di riferimento
per NSET1–N1 e NSET–N2 tramite C0046 e C0044.
Impostare C0140 = 0, se il valore di riferimento non è
impostato tramite .
E’ possibile che il drive si avvi di nuovo dopo l’abilitazione
dell’inverter!
Tener conto delle condizioni di avvio in C0142 (vedere pagina
5 – 14).
Matsushita Electric Works Italia
5 – 35
Libreria funzioni
5.4
VF–CE Compatti
Impostazione valori di riferimento analogici / digitali
5.4.7
Valori di riferimento tramite sistema di bus
Funzione
Valori di riferimento o effettivi possono essere selezionati tramite un modulo funzione
bus in FIF o un modulo bus in AIF.
Una descrizione più dettagliata è presente nel relativo manuale operativo. (vedere
pagina 10 – 4)
5.4.8
Commutazione manuale / remoto
Funzione
Scambio di due valori di riferimento:
•
Con la commutazione manuale/in remoto (M/Re) è possibile ad
esempio passare dal funzionamento in remoto, utilizzato per
l’impostazione o il servizio (funzionamento in remoto via fieldbus,
C0001 = 3), al funzionamento in locale (funzionamento manuale).
– In funzionamento manuale, il segnale remoto non deve
essere utilizzato.
– Nel funzionamento manuale il valore di riferimento viene
selezionato tramite potenziometro motore.
•
Sono possibili i seguenti cambi:
– Funzionamento bus ⇔ Valore di riferimento X3/8
– Funzionamento bus ⇔ Funzione “Potenziometro motore”
via terminali
5 – 36
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.4Impostazione valori di riferimento analogici / digitali
Attivazione
•
Per C0001 = 3:
– C0007 = 23 ... 27
– M/Re (E4) = 0, valore di riferimento via fieldbus (AIF)
– M/Re (E4) = 1, parola di controllo AIF = 0
Segnali terminali (E1 – E4) attivi, valore di riferimento
tramite funzione “potenziometro motore”
•
C0007 = 46 o 47:
– M/Re (E4 o E2) = 0, valore di riferimento via fieldbus (AIF)
– M/Re (E4 o E2) = 1, parola di controllo AIF = 0
Segnali terminali (E1 – E4) attivi, valore di riferimento
tramite terminale di ingresso analogico 8.
NOTE
•
•
•
•
•
Per C0001 = 0 e C0007 = 23 ... 27: con M/Re (E4) = 1,
passaggio alla selezione del valore di riferimento tramite
terminale 8.
Le funzioni di sicurezza CINH e QSP attivate con
funzionamento in remoto vengono resettate passando al
funzionamento manuale. Verificare che l’ospite attivi
nuovamente queste funzioni di sicurezza tornando dal
funzionamento manuale a quello in remoto.
Le frequenze JOG sono valide independemente dallo scambio
manuale /remoto.
agisce su NSET1–N1 e NSET–N2.
Utilizzare C0046 o C0044 per selezionare separatamente i
valori di riferimento.
Il tasto del tastiera non è attivo in funzionamento manuale!
Matsushita Electric Works Italia
5 – 37
Libreria funzioni
5.5
VF–CE Compatti
Inserimento / Rilevamento automatico dati motore
5.5
Inserimento / Rilevamento automatico dati motore
Codice
No.
Possibili impostazioni
Nome
C0087↵ Velocità
nominale
motore
IMPORTANTE
Default Selezione
300
{1 rpm}
16000
0.0
{0.1 A}
480.0 → in funzione dell’inverter
0.0 ... 2.0 x corrente uscita
nominale dell’inverter
10
{1 Hz}
50
{1 V}
500 → in funzione dell’inverter
C0091 Cos ϕ motore →
0.40
{0.1}
1.0 → in funzione dell’inverter
C0084 Resistenza
statore motore
0.000
{0.001 W}
64.000
0.0
0.0
{0.1 mH}
2000.0
–0–
–0–
Identificazione non attiva
–1–
Avvio Identificazione
C0088 Corrente
nominale
motore
1390
→
C0089 Frequenza
nominale
motore
C0090 Tensione
nominale
motore
C0092 Induttanza
statore motore
[C0148]* Identificazione
parametri
motore
50
→
0.000
960
•C0087, C0088, C0089, C0090,
C0091 devono essere inseriti
correttamente
•Misurazione resistenza statore
motore (C0084)
•Calcolo frequenza V/f nominale
(C0015), scorrimento (C0021)
e induttanza motore statore
•L’identificazione richiede ca. 30
s
•Al termine dell’identificazione,
– lampeggia il LED verde
sull’inverter.
– il segmento è attivo
sulla tastiera o in NAIS
Motion Control
Funzione
Rilevamento completo dei dati del motore e degli influssi del cavo motore.
Per la prima selezione impostare C0014 = –4– (controllo vettoriale) o C0014 = –5–
(selezione coppia).
Diversamente l’avviamento non è possibile.
5 – 38
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.5Inserimento / Rilevamento automatico dati motore
Regolazione
Procedimento:
1.
Disabilitare l’inverter. Se necessario, attendere finchè il
drive si arresta.
2.
Inserire C0087, C0088, C0089, C0090 e C0091 del
proprio motore (vedere targhetta):
E’ assolutamente necessario che i valori inseriti siano corretti in
quanto tutti i parametri importanti, quali la compensazione di
scorrimento, la corrente di minimo e il controllo I2t, dipendono da
questi valori.
Inserire i valori della corrente nominale di motore (C0088) e della
tensione nominale di motore (C0090) in funzione del tipo di
collegamento (star o delta).
3.
Selezionare C0148 = –1–, confermare con .
4.
Attivare l’inverter. Inizia l’identificazione (il LED verde
sull’inverter lampeggia molto rapidamente).
Viene misurata la resistenza statorica del motore, e dai valori inseriti
viene calcolata l’induttanza statorica del motore. C0015 e C0021
vengono assegnati automaticamente.
L’identificazione richiede ca. 30 s.
L’identificazione è completata quando si accende il LED verde
sull’inverter (tastiera, NAIS Motion Control: è attivo).
5.
Disattivare l’inverter.
continua
Matsushita Electric Works Italia
5 – 39
Libreria funzioni
5.5
VF–CE Compatti
Inserimento / Rilevamento automatico dati motore
NOTE
•
Assicurarsi che il motore sia freddo quando inizia
l’identificazione!
– Durante l’identificazione, la corrente scorre
attraverso le uscite U, V dell’inverter.
– Non è necessario scollegare il carico della
macchina. I freni meccanici possono mantenere
la posizione di frenatura.
– Con il motore a vuoto l’albero del motore può
spostarsi leggermente.
•
•
•
La regolazione dei dati del motore (max. +25 %) richiesta per
compensare le variazioni legate alla temperatura si imposta
automaticamente durante il funzionamento. Dopo il
collegamento al circuito principale, diventano validi i valori di
C0084 e C0092 calcolati con C0148.
C0084 e C0092 possono essere inseriti o corretti
manualmente.
L’identificazione viene fatta soltanto per il gruppo di parametri
attivati tramite segnali di ingresso digitali.
– Se si desidera inserire dati di motore per un altro
gruppo di parametri, è necessario passare a
questo gruppo di parametri (tramite segnali di
ingresso digitali) e avviare nuovamente
l’identificazione.
– I parametri del motore possono essere trasferiti
manualmente ad altri gruppi di parametri sotto
C0002. Il parametro corrispondente non deve
essere attivo.
•
5 – 40
L’identificazione dei parametri motore influenza il
funzionamento regolare del drive. E’ possibile quindi
ottimizzare le caratteristiche di marcia regolare per basse
velocità utilizzando la modalità di controllo “Controllo
caratteristica V/f con caratteristica lineare” (C0014 = –2–).
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.6Controllo di processo, controllo limite di corrente
5.6
Controllo di processo, controllo limite di corrente
5.6.1
Codice
No.
Controllo PID come controllo di processo
Nome
Possibili impostazioni
Default Selezione
IMPORTANTE
C0070 Guadagno
controllo processo
1.00
0.00
C0071 Tempo integrale di
azione del
controllo di
processo
C0072 Componente
differenziale del
controllo di
processo
C0074 Influenza del
controllo di
processo
C0238↵ Precontrollo della
frequenza
100
10
{1}
9999 9999 = componente I non attivo
0.0
0.0
{0.1}
5.0 0.0 = componente D non attivo
0.0
0.0
{0.1 %}
–2–
–0–
–1–
–2–
{0.01}
300.00 0.00 = componente P non attivo
100.0
Nessun precontrollo (solo controllo
di processo)
Precontrollo (totale valore di
riferimento + controllo processo)
Piena influenza del controllo di
processo
Influenza limitata del controllo di
processo
Nessun precontrollo (solo valore di Nessuna influenza del controllo
riferimento totale)
di processo (non attivo)
Valore di riferimento totale
(PCTRL1–SET3) = valore di
riferimento principale + valore di
riferimento aggiuntivo
Funzione
Controllo di pressione, temperatura, velocità flusso, umidità, livello, posizione del
ballerino, velocità, ...
Il controllo di processo richiede un valore di riferimento (es. tastiera) e un valore effettivo
(es. da un sensore, X3/8).
Regolazione
C0071
Tempo azione integrale risultante
Tnom
10 ... 5000
10 ms ... 5000 ms
5000 ... 6000
5 s ... 10 s
6000 ... 7000
10 s ... 100 s
7000 ... 8000
100 s ... 1000 s
8000 ... 9998
1000 s ... 9998 s
I valori della precedente tabella sono solo orientativi. E’ sempre necessaria una
regolazione precisa.
Impostare C0070, C0071 e C0072 in modo che, in caso di variazione del valore di
riferimento e del valore reale, il valore dell’obbiettivo venga raggiunto
•
•
velocemente e
con oscillazione minima.
Matsushita Electric Works Italia
5 – 41
Libreria funzioni
5.6
VF–CE Compatti
Controllo di processo, controllo limite di corrente
Valori guida per controllo pressione e velocità di flusso
•
•
•
Il componente differenziale KD (C0072) non è solitamente richiesto
per controlli di pressione e di velocità di flusso (C0072 = 0).
Impostare l’incidenza (C0074) a 100 %.
Disattivare il precontrollo della frequenza (C0238 = –0–)
Codice
Gas
Liquidi
C0070 (KP)
0.1
0.02 ... 0.1
C0071 (Tnom)
5000 (Tnom = 5 s)
200 ... 1000 (Tnom = 0.2 s ... 1 s)
C0072 (KD)
0
0
Valori guida per controllo velocità
Vedere esempi applicativi “controllo velocità” (vedere pagina 11 – 3).
Codice
Valore
C0070 (KP)
5
C0071 (Tnom)
100 (Tnom = 0.1 s)
C0072 (KD)
0
Incidenza del controllo PID (C0074)
Il fattore controllo è importante per un controllo di processo con precontrollo della
frequenza (C0238 = –1–), es. controllo velocità.
•
•
•
•
Il fattore controllo è calcolato dalla differenza dei valori di C0050
(frequenza uscita) e C0051 (valore effettivo controllo di processo).
Il fattore controllo determina l’influenza C0074 del controllo di
processo.
L’incidenza (C0074) si riferisce alla frequenza di uscita massima
C0011.
C0074 incide sulla stabilità del circuito di controllo. C0074 deve
essere più basso possibile.
Calcolo dell’incidenza C0074 [%]:
Incidenza [%] + C0050 * C0051 @ 100 %
C0011
5 – 42
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.6Controllo di processo, controllo limite di corrente
ESEMPIO
Deve essere calcolata l’incidenza per i seguenti valori:
C0011 = 50 Hz, C0050 = 53 Hz, C0051 = 50 Hz
6 %+
•
•
5.6.1.1
53 Hz * 50 Hz
@ 100 %
50 Hz
Impostare l’incidenza in modo che l’uscita del controllo di processo
copra il valore calcolato per ciascun punto operativo.
– Nell’esempio (influenza = 6 %) impostare es.
C0074 = 10 %. Questo valore guida include tolleranze che
devono essere considerate.
Se l’incidenza (C0074) è troppo elevata, il circuito di controllo
potrebbe divenire instabile.
Selezione valore di riferimento per il controllo di processo
Codice
No.
Nome
C0145*↵ Fonte valore di
riferimento
controllo di
processo
Possibili Impostazioni
Default Selezione
–0–
C0138* Valore di
riferimento
controllo di
processo 1
(PCTRL1–
SET1)
C0181* Valore di
riferimento
controllo di
processo 2
(PCTRL1–
SET2)
0.00
IMPORTANTE
–0–
Valore di riferimento totale
(PCTRL1–SET3)
–1–
C0181 (PCTRL1–SET2)
–2–
C0138 (PCTRL1–SET1)
–480.00
{0.02 Hz}
480.00
–480.00
480.00
{0.02 Hz}
Valore di riferimento
principale + aggiuntivo
Funzione
Selezione di un valore di riferimento di frequenza, ad esempio per:
•
•
la posizione del ballerino per un controllo del ballerino in un drive in
linea,
il valore di riferimento di pressione per un controllo della pressione.
Matsushita Electric Works Italia
5 – 43
Libreria funzioni
5.6
VF–CE Compatti
Controllo di processo, controllo limite di corrente
Attivazione
C0145 = –0–
vedere pagina 5 – 26 segg. per possibili selezioni di valori di riferimento
Valore di riferimento controllo di processo = valore precontrollo PCTRL1–SET3
C0145 = –1–
Valore di riferimento per controllo di processo = valore in C0181.
Applicazioni: es. controlli del ballerino, controlli pressione e velocità di flusso
C0145 = –2–
Valore di riferimento per controllo di processo. La selezione è possibile anche con
C0138 (lo stesso di C0181)
NOTA
•
Selezionare C0145 = 0 se il valore di riferimento deve essere
selezionato tramite:
– valori JOG,
– funzione j della tastiera,
– in relazione a commutazione manuale/remoto,
salti di frequenza, generatore funzione rampa,
valore di riferimento aggiuntivo,
– C0044, C0046 e C0049.
•
5 – 44
C0181 è identico in tutti i gruppi di parametri.
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.6Controllo di processo, controllo limite di corrente
5.6.1.2
Selezione valori effettivi per il controllo di processo
Funzione
Il valore effettivo è il segnale di risposta dal processo (es. da un encoder di pressione
o velocità).
Attivazione
C0005 = 6
Risposta come segnale digitale tramite X3/E1
C0005 = 7
Risposta analogica tramite X3/8
C0051
Visualizzazione del valore effettivo del controllo di processo (PCTRL1–ACT)
5.6.1.3
Disattivazione componente azione integrale (PCTRL1–I–OFF)
Funzione
L’uscita del controllo di processo fornisce la differenza tra valore di riferimento e valore
effettivo, se necessario con il guadagno VP. E’ possibile quindi evitare un controllo
eccessivo in fase di avvio del drive. Il componente di azione integrale KI può essere
collegato quando il drive è in movimento. Applicazioni: es. controllo di posizione del
ballerino.
Attivazione via terminale
C0007 = –28– ... –34–, –48–, –50–, –51–:
Contatto CHIUSO su X3/E2
Attivazione tramite soglia di frequenza
C0184 > 0.0 Hz
5.6.1.4
Disattivazione del controllo di processo (PCTRL1–OFF)
Funzione
L’uscita del controllo di processo non trasmette segnali finchè questa funzione è attiva.
Attivazione
C0007 = –48–, –49–, –50–: contatto CHIUSO a X3/E4
Matsushita Electric Works Italia
5 – 45
Libreria funzioni
5.6
VF–CE Compatti
Controllo di processo, controllo limite di corrente
5.6.2
Controllo limite di corrente (controllo Imax)
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0077* Guadagno
Imax
controllo
C0078* Tempo
azione
integrale
Imax
controllo
0.25
65
IMPORTANTE
0.00
{0.01}
16.00 0.00 = componente P non attivo
12
{1 ms}
9990 9990 = componente I non attivo
Funzione
E’ possibile regolare il controllo Imax per il controllo di momenti lunghi di inerzia.
Regolazione
Per ragioni di stabililtà il controllo Imax ha un’impostazione di fabbrica.
Impostazioni per controllo di momenti lunghi di inerzia:
•
•
•
C0014 = –2– o C0014 = –3– (controllo caratteristica V/f)
V P (C0077): ≈ 0.06
T i (C0078): ≈ 750 ms
NOTA
C0077 e C0078 sono identici in tutti i gruppi di parametri.
5 – 46
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.7 Collegamento di segnali analogici
5.7
5.7.1
Collegamento di segnali analogici
Configurazione di segnali di uscita analogici
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0108* Uscita
analogica
guadagno
X3/62
(AOUT1–
GAIN)
128
0
C0109* Uscita
analogica
offset X3/62
(AOUT1–
OFFSET)
C0111↵ Uscita
analogica
configurazione
X3/62
(AOUT1–IN)
0.00
–10.00
IMPORTANTE
{1}
{0.01 V}
255
10.00
Uscita segnali analogici al terminale
–0–
–0–
–1–
–2–
–3–
–4–
–5–
–6–
–7–
–8–
Frequenza uscita
(MCTRL1–NOUT+SLIP)
Carico inverter (MCTRL1–MACT)
Corrente assorbita dal motore
(MCTRL1–IMOT)
Tensione DC del bus
(MCTRL1–DCVOLT)
Potenza motore
Tensione motore (MCTRL1–VOLT)
Frequenza 1/uscita (1/C0050)
(MCTRL1–1/NOUT)
Frequenza uscita entro i limiti
impostati (NSET1–C0010...C0011)
Funzionamento con controllo
processo (C0238 = 0, 1):
Valore effettivo controllo processo
(PCTRL1–ACT)
Funzionamento senza controllo
processo (C0238 = 2):
Frequenza uscita senza scorrimento
(MCTRL1–NOUT)
6 V ≡ C0011
3 V ≡ Coppia nominale motore
per controllo vettoriale (C0014 =
4), altrimenti corrente nominale
effettiva (corrente effettiva /
C0091)
3 V ≡ corrente nominale inverter
6 V ≡ 1000 VDC a 400 V circuito
principale
6 V ≡ 380 VDC a 240 V circuito
principale
3 V ≡ Potenza nominale motore
4.8 V ≡ Tensione nominale motore
2 V ≡ C0050 = 0.4 × C0011
0 V ≡ f = fmin (C0010)
6 V ≡ f = fmax (C0011)
6 V ≡ C0011
Funzione
Processo analogico o segnali di controllo possono essere assegnati liberamente
all’uscita analogica X3/62.
Regolazione
C0108:
128 corrisponde a un segnale di uscita di 6 V a X3/62 (impostazione di default).
Matsushita Electric Works Italia
5 – 47
Libreria funzioni
5.7
VF–CE Compatti
Collegamento di segnali analogici
Livello per impostazioni di default
Segnale
Livello
0
Frequenza uscita
6 V se frequenza uscita = C0011
1
Carico inverter
3 V, se C0056 = 100 %
2
Corrente assorbita dal motore
3 V, se C0054 = corrente nominale inverter
3
Tensione DC di bus
6 V a 1000 V DC (inverter con 3 AC/400 V)
4
Potenza motore
3 V a potenza nominale, Pnom = C0052 * C0056
5
Tensione motore
4.8 V a C0052 = 400 V (inverter con 3 AC/400 V)
6
Frequenza 1/uscita
2.5 V, se C0011 = 50 Hz, C0050 = 20 Hz
7
C0010 ... C0011
Tensione uscita [V] + 6, 00 V @
8
Val. eff. controllo processo
6 V, se C0051 = frequenza max. uscita
Selezione
f * C0011
C0011 * C0010
NOTE
•
•
•
Vedi tabella codici: vedere pagina A – 3 segg. , C0111
Selezione 0 e 7: Uscita con compensazione di scorrimento
Selezione 8:
– Uscita frequenza senza compensazione di
scorrimento
– Valore effettivo controllo di processo.
Suggerimento
Selezione 6:
Il segnale analogico in uscita è proporzionale alla
frequenza di uscita. Questo segnale può essere
utilizzato per visualizzare, ad esempio, il tempo
impiegato per lavorare un prodotto (es. produzione in
fornace continua).
5 – 48
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.7 Collegamento di segnali analogici
ESEMPIO
Tensione uscita [V] + 1.00 V @
C0011 [Hz]
@ C0108
128
C0050 [Hz]
6.00
Tensione uscita [V]
5.00
C0108 o C0420 = 128
4.00
3.00
2.00
1.00
0.00
0
Matsushita Electric Works Italia
10
20
30
f [Hz]
40
50
60
5 – 49
Libreria funzioni
5.8
Collegamento di segnali digitali, uscita messaggi
5.8
5.8.1
Collegamento di segnali digitali, uscita messaggi
Configurazione segnali digitali in ingresso
Codice
No.
Nome
C0007 Configurazione
↵ di segnali
digitali
5 – 50
VF–CE Compatti
Possibili impostazioni
Default Selezione
–0–
IMPORTANTE
E4
E3
E2
–0–
CW/CCW
DCB
JOG2/3
–1–
CW/CCW
PAR
JOG2/3
–2–
CW/CCW
QSP
JOG2/3
–3–
CW/CCW
PAR
DCB
–4–
CW/CCW
QSP
PAR
–5–
CW/CCW
DCB
TRIP set
–6–
CW/CCW
PAR
TRIP set
–7–
CW/CCW
PAR
DCB
–8–
CW/CCW
QSP
PAR
–9–
CW/CCW
QSP
TRIP set
–10–
CW/CCW
TRIP set
UP
–11–
CW/CCW
DCB
UP
–12–
CW/CCW
PAR
UP
–13–
CW/CCW
QSP
UP
–14–
CCW/QSP
CW/QSP
DCB
–15–
CCW/QSP
CW/QSP
PAR
–16–
CCW/QSP
CW/QSP
JOG2/3
–17–
CCW/QSP
CW/QSP
PAR
–18–
CCW/QSP
CW/QSP
PAR
–19–
CCW/QSP
CW/QSP
DCB
–20–
CCW/QSP
CW/QSP
TRIP set
–21–
CCW/QSP
CW/QSP
UP
–22–
CCW/QSP
CW/QSP
UP
–23–
M/Re
CW/CCW
UP
E1
JOG1/3 •CW = rotazione CW
•
•CCW
= rotazione CCW
JOG1/3 •DCB = freno iniezione
DC
JOG1/3
•PAR = Scambio (PAR1
↔ PAR2)
JOG1/3
PAR1 = APERTO;
PAR2 = CHIUSO
JOG1/3
Il terminale
JOG1/3
corrispondente deve
essere assegnato alla
JOG1/3
funzione “PAR” in
PAR1 e PAR2.
TRIP set
•JOG1/3, JOG2/3 =
Selezione valori di
TRIP set
riferimento fissi
JOG1/3
JOG1: JOG1/3 =
CHIUSO, JOG2/3 =
DOWN
APERTO
JOG2: JOG1/3 =
DOWN
APERTO, JOG2/3 =
CHIUSO
DOWN
JOG3: JOG1/3 =
CHIUSO, JOG2/3 =
DOWN
CHIUSO
JOG1/3 •QSP = Arresto rapido
•TRIP set = segnale di
JOG1/3
errore dall’esterno
JOG1/3 •SU/GIU’ = Funzioni
potenziometro motore
DCB
•M/Re = Scambio
manuale/remoto
TRIP set •PCTRL1–I–OFF =
Disattivazione
TRIP set
componente I del
controllo di processo
JOG1/3
•
•DFIN1–ON
= Ingresso
DOWN
digitale in frequenza 0
... 10 kHz
JOG1/3 •PCTRL1–OFF =
Disattivazione del
DOWN
controllo di processo
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.8Collegamento di segnali digitali, uscita messaggi
Codice
No.
Nome
C0007 Configura↵ zione di
(cont.) ingressi
digitali
Possibili Impostazioni
Default Selezione
–0–
IMPORTANTE
–24–
M/Re
PAR
UP
DOWN
–25–
M/Re
DCB
UP
DOWN
–26–
M/Re
JOG1/3
UP
DOWN
–27–
M/Re
TRIP set
UP
DOWN
–28–
JOG2/3
JOG1/3
PCTRL1–I–
OFF
DFIN1–ON
–29–
JOG2/3
DCB
PCTRL1–I–
OFF
DFIN1–ON
DFIN1–ON
–30–
JOG2/3
QSP
PCTRL1–I–
OFF
–31–
DCB
QSP
PCTRL1–I–
OFF
DFIN1–ON
–32–
TRIP set
QSP
PCTRL1–I–
OFF
DFIN1–ON
–33–
QSP
PAR
PCTRL1–I–
OFF
DFIN1–ON
DFIN1–ON
–34–
CW/QSP
CCW/QSP
PCTRL1–I–
OFF
–35–
JOG2/3
JOG1/3
PAR
DFIN1–ON
–36–
DCB
QSP
PAR
DFIN1–ON
–37–
JOG1/3
QSP
PAR
DFIN1–ON
–38–
JOG1/3
PAR
TRIP set DFIN1–ON
–39–
JOG2/3
JOG1/3
TRIP set DFIN1–ON
–40–
JOG1/3
QSP
TRIP set DFIN1–ON
–41–
JOG1/3
DCB
TRIP set DFIN1–ON
–42–
QSP
DCB
TRIP set DFIN1–ON
–43–
CW/CCW
QSP
TRIP set DFIN1–ON
–44–
UP
DOWN
PAR
DFIN1–ON
–45–
CW/CCW
QSP
PAR
DFIN1–ON
JOG1/3
–46–
M/Re
PAR
QSP
–47–
CW/QSP
CCW/QSP
M/Re
JOG1/3
–48–
PCTRL1– OFF
DCB
PCTRL1–I–
OFF
DFIN1–ON
–49–
PCTRL1– OFF
JOG1/3
QSP
DFIN1–ON
–50–
PCTRL1– OFF
JOG1/3
PCTRL1–I–
OFF
DFIN1–ON
–51–
DCB
PAR
PCTRL1–I–
OFF
DFIN1–ON
•CW = rotazione CW
•CCW = rotazione CCW
•
•DCB
= freno iniezione
DC
•PAR = Scambio
(PAR1 ↔ PAR2)
PAR1 = APERTO;
PAR2 = CHIUSO
Il terminale
corrispondente deve
essere assegnato alla
funzione “PAR” in
PAR1 e PAR2.
•JOG1/3,
JOG1/3, JOG2/3 =
Selezione di valori
riferimento fissi
JOG1: JOG1/3 =
HIGH, JOG2/3 =
LOW
JOG2: JOG1/3 =
LOW, JOG2/3 = HIGH
JOG3: JOG1/3 =
HIGH, JOG2/3 =
HIGH
•
•QSP
= Arresto rapido
•TRIP set = errore
esterno
•SU/GIU’ = Funzioni
potenziometro motore
•
•M/Re
= Scambio
manuale/remoto
•PCTRL1–I–OFF =
Disattivazione
componente I del
controllo di processo
•DFIN1–ON = Ingresso
digitale in frequenza 0
... 10 kHz
•PCTRL1–OFF =
Disattivazione del
controllo di processo
Funzione
I segnali digitali possono essere assegnati agli ingressi digitali.
Matsushita Electric Works Italia
5 – 51
Libreria funzioni
5.8
VF–CE Compatti
Collegamento di segnali digitali, uscita messaggi
5.8.2
Configurazione segnali digitali in uscita
Codice
No.
Nome
C0008↵ Configurazione
uscita a relè K1
(relè)
Possibili impostazioni
Default Selezione
–1–
–0–
–1–
–2–
–3–
–4–
–5–
–6–
–7–
–8–
–9–
–10–
–11–
–12–
–13–
–14–
–15–
–16–
C0117↵ Configurazione
uscita digitale
A1 (DIGOUT1)
5 – 52
IMPORTANTE
Pronto a funzionare
(DCTRL1–RDY)
Messaggio errore
TRIP(DCTRL1–TRIP)
Motore in funzione (MCTRL1–RUN)
Motore in funzione / rotazione CW
(MCTRL1–RUN–CW)
Motore in funzione / rotazione CCW
(MCTRL1–RUN–CCW)
Frequenza uscita = 0
(MCTRL1–NOUT=0)
Valore riferimento frequenza
raggiunto (MCTRL–RFG1=NOUT)
Soglia Qmin raggiunta
(PCTRL1–QMIN)
Limite Imax raggiunto
(MCTRL1–IMAX)
C0014 = –5–: Valore riferimento
coppia raggiunto
Temperatura eccessiva (ϑmax
– 5°C) (DCTRL1–OH–WARN)
TRIP o Qmin o blocco impulsi (IMP)
(DCTRL1–IMP)
Attenzione PTC
(DCTRL1–PTC–WARN)
Corrente assorbita dal motore <
corrente di soglia
(DCTRL1–IMOT<ILIM)
Corrente assorbita dal motore <
corrente di soglia e soglia Qmin
raggiunte
(DCTRL1–(IMOT<ILIM)–QMIN)
Corrente assorbita dal motore <
corrente di soglia e generatore
funzione rampa 1: ingresso= uscita
(DCTRL1–(IMOT<ILIM)–RFG1=0)
Allarme errore di fase del motore
(DCTRL1–LP1–WARN)
Frequenza minima uscita raggiunta
(PCTRL1–NMIN)
Corrente assorbita dal motore =
C0054
Corrente di soglia = C0156
–0–
–0– ...
–16–
vedere C0008
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.9Controllo termico del motore, rilevamento errori
5.9
5.9.1
Controllo termico del motore, rilevamento errori
Controllo termico del motore
Controllo I2 x t
5.9.1.1
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0120 I2t disattivazione
0
0
IMPORTANTE
200 C0120 = 0: I2t disattivazione non attiva
{1 %}
Funzione
Con il controllo I2 ⋅ t è possibile il controllo senza sensori di motori trifase AC
autoventilati.
Regolazione
•
•
•
Inserire un limite di carico individuale per il motore collegato.
Se si eccede il valore per un lungo periodo di tempo, l’inverter darà
errore OC6 e si disattiverà (vedi tabella).
I limiti di corrente C0022 e C0023 hanno soltanto un’influenza
indiretta sul calcolo I2 ⋅ t: le impostazioni di C0022 e C0023
possono rendere impossibile il funzionamento dell’inverter a
massimo carico (C0056).
Se si seleziona un drive che non corrisponde (corrente di uscita
molto superiore alla corrente nominale del motore): ridurre C0120
del fattore di non corrispondenza.
Tempo di
risposta [s]
f=0 Hz
20 Hz
>40 Hz
360
300
240
180
120
60
0
C0056/C0120
0
Matsushita Electric Works Italia
0.5
1.0
1.5
5 – 53
Libreria funzioni
5.9
VF–CE Compatti
Controllo termico del motore, rilevamento errori
ESEMPIO
Con C0120 = 100 % e con un carico C0056 = 150 %, l’inverter
si spegne dopo 60 s quando raggiunge una f > 40 Hz e prima
quando raggiunge una f < 40 Hz.
NOTE
•
•
L’impostazione 0 % disattiva questa funzione.
Questo monitoraggio non fornisce una protezione totale del
motore dato che la temperatura calcolata del motore è
impostata su “0” dopo ogni collegamento e scollegamento al
circuito principale. Il motore collegato si può surriscaldare se
– è già caldo ed è continuamente in sovraccarico.
– la corrente d’aria di raffreddamento è interrotta
oppure l’aria è troppo calda.
•
•
•
•
5 – 54
E’ possibile ottenere una protezione totale del motore con un
termistore PTC o un termostato nel motore.
Per impedire che i motori con ventilazione forzata si attivino
troppo presto, è possibile disattivare questa funzione.
Per il controllo di motori con carichi < 100 %, anche C0120 deve
essere ridotto.
Il funzionamento dell’inverter con sovraccarichi del 120 % può
causare una disattivazione I2 t, se è impostato C0120 3 100 %.
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.9Controllo termico del motore, rilevamento errori
5.9.1.2
Controllo motore PTC / Rilevamento inconvenienti di terra
Codice
No.
Nome
Possibili Impostazioni
Default Selezione
C0119↵ Configurazione
ingresso PTC /
rilevamento
inconvenienti
terra
–0–
IMPORTANTE
Rilevamento
inconvenienti di
terra attivo
–0–
Ingresso PTC
non attivo
–1–
Ingresso PTC
attivo,
Funzione allarme
TRIP impostata
Ingresso PTC
attivo,
allarme
impostato
Rilevamento
Ingresso PTC
inconvenienti di
non attivo
terra
Ingresso PTC
attivo,
TRIP allarme
impostato
Ingresso PTC
attivo,
allarme
impostato
–2–
–3–
–4–
–5–
Disattivare il rilevamento
inconvenienti terra se è stato
attivato erroneamente
Funzione
Ingresso per il collegamento di resistori PTC a DIN44081 e DIN44082. E’ possibile
rilevare la temperatura del motore e integrarla nel controllo del drive.
Questo ingresso può essere utilizzato anche per il collegamento di un termostato
(normalmente chiuso).
Attivazione
Procedimento:
1.
Collegare il circuito di controllo del motore a X2/T1 e
X2/T2.
2.
Impostazione di parametri per la valutazione del segnale
PTC:
Se con la valutazione PTC si rileva una temperatura
eccessiva, questa può essere valutata in tre modi:
C0119 = –0–, –3–: PTC non attivo
C0119 = –1–, –4–: messaggio TRIP (display tastiera = OH3, codice
errore di sistema= 53)
C0119 = –2–, –5–: Messaggio allarme (display tastiera = OH51,
codice errore di sistema = 203)
continua
Matsushita Electric Works Italia
5 – 55
Libreria funzioni
5.9
VF–CE Compatti
Controllo termico del motore, rilevamento errori
NOTE
•
•
•
•
L’inverter è in grado di valutare soltanto sistemi con motore
PTC.
Non è possibile collegari vari sistemi di motori PTC in serie o
in parallelo.
Se si collegano vari motori ad un inverter, utilizzare dei
termistori (normalmente chiusi) per controllare la temperatura
del motore.
Per la valutazione, i termostati devono essere collegati in
serie.
Con ca. R w 1.6 kW è impostato il messaggio di errore o allarme.
Per test di funzionamento, collegare un resistore non variabile
all’ingresso PTC:
– Viene impostato un messaggio di errore o
allarme se R > 2 kW.
– R < 250 W non si attiva il messaggio.
5.9.2
Rilevamento errori (DCTRL1–TRIP–SET / DCTRL1–TRIP–RESET)
Funzione
Se la funzione DCTRL1–TRIP–SET è attivata, l’ unità è in grado di effettuare rilevamenti
e verificare quindi eventuali errori esterni. L’inverter indica l’errore EEr e disabilita
l’inverter.
Attivazione
C0007
X3/E1
–7–, –8–, –18–, –19–
APERTO
–5–, –6–, –9–, –20–, –38– ... –43–
10–, –27–
X3/E2
X3/E3
X3/E4
APERTO
APERTO
–32–
APERTO
NOTA
Reset messaggi di errore: vedere pagina 6 – 8.
5 – 56
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.10
Visualizzazione dei dati operativi, diagnosi
5.10 Visualizzazione dei dati operativi, diagnosi
5.10.1
Valori visualizzati
Codice
No.
Possibili impostazioni
Nome
C0004*↵ Display a barre
IMPORTANTE
Default Selezione
56
Possibili tutti i codici
56 = carico inverter (C0056)
•Il display a barre indica il valore
selezionato in % dopo l’attivazione
del circuito
•Range –180 % ... +180 %
•Indicazione display C0517/1
C0044* Valore riferimento
2 (NSET1–N2)
–480.00
{0.02 Hz}
480.00 Selezione e visualizzazione
C0046* Valore riferimento
1 (NSET1–N1)
C0047* Valore riferimento
coppia o valore
limite coppia
(MCTRL1–MSET)
–480.00
{0.02 Hz}
480.00 Selezione e visualizzazione
0
{%}
C0050* Frequenza uscita
(MCTRL1–NOUT)
–480.00
{Hz}
480.00 Solo visualizzazione: frequenza
uscita senza compensazione
scorrimento
C0051* Valore effettivo
controllo di
processo
(PCTRL1–ACT)
–480.00
{Hz}
C0052* Tensione motore
(MCTRL1–VOLT)
0
{V}
480.00 Per funzionamento senza controllo di
processo (C0238 = 2): Solo
visualizzazione: frequenza uscita con
compensazione scorrimento
(MCTRL1–NOUT+SLIP)
Per funzionamento con controllo di
processo (C0238 = 0, 1): Solo
visualizzazione
1000 Solo visualizzazione
C0053* Tensione bus DC
(MCTRL1–
DCVOLT)
C0054* Corrente assorbita
dal motore
(MCTRL1–IMOT)
0
{V}
1000 Solo visualizzazione
0
{A}
400 Solo visualizzazione
C0056* Carico inverter
(MCTRL1–MOUT)
–255
{%}
255 Solo visualizzazione
C0061* Temperatura
interna inverter
0
{°C}
C0138* Valore riferimento
1 controllo di
processo
(PCTRL1–SET1)
–480.00
C0049* Valore riferimento
aggiuntivo
(PCTRL1–NADD)
400 Modo ”Controllo di coppia” (C0014 =
5): selezione e visualizzazione valore
riferimento coppia
Riferimento: coppia nominale del
Modo ”Controllo caratteristica V/f” o
motore rilevata con identificazione dei ”Controllo vettoriale” (C0014 = 2, 3,
parametri del motore
4): selezione e visualizzazione valore
riferimento coppia
–480.00
{Hz}
480.00 Selezione e visualizzazione
{0.02 Hz}
255 Solo visualizzazione
Se C0061 >+85°C si ha errore OH
480.00 Selezione e visualizzazione
Funzione
Alcuni parametri, misurati dall’inverter durante il funzionamento, possono essere
visualizzati sulla tastiera o sul PC.
Matsushita Electric Works Italia
5 – 57
Libreria funzioni
5.10
VF–CE Compatti
Visualizzazione dei dati operativi, diagnosi
5.10.2
Diagnosi
Codice
No.
Possibili impostazioni
Nome
IMPORTANTE
Default Selezione
C0093* Tipo di inverter
xxxy
Solo visualizzazione
•xxx = Dati di potenza della
targhetta (es. 551 = 550 W)
•y = Classe di tensione (2 = 240 V,
4 = 400 V)
C0099* Versione
software
x.y
Solo visualizzazione
x = Versione, y = Indice
Visualizzazione contenuto storico
del buffer
•
•tastiera:
rilevamento errori a tre
cifre, alfanumerici
Tempo totale CINH = HIGH {h}
Solo visualizzazione
Tempo totale attivazione circuito {h}
Solo visualizzazione
0
102
104
Solo visualizzazione
C0161* Errore attuale
C0162* Ultimo errore
C0163* Penultimo
errore
C0164* Terz’ultimo
errore
C0168* Errore attuale
C0178* Ore di
funzionamento
C0179* Tempo attivaz.
circuito
C0183* Diagnosi
142
151
161
250
Nessun errore
TRIP attivo
Messaggio “Sovratensione(OU)” o
“Sottotensione(LU)” attivo
Blocco impulsi
Arresto rapido attivo
Freno iniezione DC attivo
Allarme attivo
C0200* Identificazione
software
Solo visualizzazione
C0201* Data creazione
software
Solo visualizzazione
C0202* Identificazione
software
Solo visualizzazione
1
...
4
C0304
...
C0309
C0518
C0519
Codice di servizio Matsushita
Codici di
servizio
Modifiche solo da parte del
servizio Matsushita!
Codici di
servizio
Modifiche solo da parte del
servizio Matsushita!
Funzione
Visualizzazione codici per la diagnosi.
5 – 58
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.11 Gestione set di parametri
5.11 Gestione set di parametri
5.11.1
Trasferimento set di parametri
Codice
No.
Possibili impostazioni
Nome
[C0002]* Trasferimento
set parametri
Default
–0–
IMPORTANTE
Selezione
–0–
Funzione eseguita
Set parametri dell’inverter
–1–
–2–
–3–
–4–
–10–
Impostazione default PAR1
Impostazione default PAR2
Impostazione default PAR3
Impostazione default PAR4
Tastiera PAR1 ... PAR4
–11–
–12–
–13–
–14–
–20–
Tastiera PAR1
Tastiera PAR2
Tastiera PAR3
Tastiera PAR4
PAR1 ... PAR4 Tastiera
Sovrascrive il set di parametri
dell’inverter selezionato con le
impostazioni di default.
Sovrascrive tutti i set di
parametri dell’inverter con i dati
della tastiera.
Sovrascrive un singolo set di
parametri con i dati della
tastiera.
Copia tutti i set di parametri
dell’inverter sulla tastiera.
Set parametri modulo funzione in FIF
–31–
–32–
–33–
–34–
–40–
Impostazione default FPAR1
Impostazione default FPAR2
Impostazione default FPAR3
Impostazione default FPAR4
Tastiera FPAR1 ... FPAR4
–41–
–42–
–43–
–44–
–50–
Tastiera FPAR1
Tastiera FPAR2
Tastiera FPAR3
Tastiera FPAR4
FPAR1 ... FPAR4
Tastiera
Sovrascrive il set di parametri
del modulo funzione con le
impostazioni di default.
Sovrascrive tutti i set di
parametri del modulo funzione
con i dati della tastiera.
Sovrascrive un singolo set di
parametri del modulo funzione
con i dati della tastiera.
Copia tutti i set di parametri del
modulo funzione sulla tastiera.
Set parametri inverter + modulo
funzione in FIF
–61–
–62–
–63–
–64–
–70–
Impost. default PAR1 + FPAR1
Impost. default PAR2 + FPAR2
Impost. default PAR3 + FPAR3
Impost. default PAR4 + FPAR4
Tastiera PAR1 ... PAR4 + FPAR1
... FPAR4
–71–
–72–
–73–
–74–
–80–
Tastiera PAR1 + FPAR1
Tastiera PAR2 + FPAR2
Tastiera PAR3 + FPAR3
Tastiera PAR4 + FPAR4
PAR1 ... PAR4 + FPAR1 ... FPAR4
Tastiera
Sovrascrive singoli set di
parametri con le impostazioni di
default
Sovrascrive tutti i set di
parametri con i dati della
tastiera.
Sovrascrive tutti i set di
parametri con i dati della
tastiera.
Copia tutti i set di parametri
sulla tastiera.
continua
Matsushita Electric Works Italia
5 – 59
Libreria funzioni
5.11
VF–CE Compatti
Gestione set di parametri
Funzione
Gestione di set di parametri tramite tastiera. E’ possibile impostare nuovamente i valori
di default e trasferire i set di parametri dalla tastiera all’inverter o viceversa. Ciò permette
di copiare le impostazioni da un inverter ad un altro.
Impostazione di default del carico
Procedimento:
1. Collegare la tastiera.
2. Bloccare l’inverter con o con il terminale (X3/28 =
APERTO).
3. Impostare il numero di selezione in C0002 e confermarlo
con .
Es. C0002 = 1: il set di parametri 1 dell’inverter verrà sovrascritto
dall’impostazione di default.
Se store è disattivo, viene caricata nuovamente l’impostazione di
default.
Trasferimento di set di parametri dall’inverter alla tastiera.
Procedimento:
1. Collegare la tastiera.
2. Bloccare l’inverter con o con il terminale (X3/28 =
BASSO).
3. Impostare C0002 = 20 o 50 o 80 e confermare con .
Se saue è disattivo, tutti i set di parametri vengono trasferiti alla
tastiera.
Trasferimento di set di parametri dalla tastiera all’inverter
Procedimento:
1. Collegare la tastiera.
2. Bloccare l’inverter con o con il terminale (X3/28 =
BASSO).
3. Impostare il numero di selezione in C0002 e confermarlo
con . Es.:
C0002 = 10: Tutti i set di parametri dell’inverter verranno sovrascritti
con le impostazione della tastiera.
C0002 = 11: il set di parametri 1 dell’inverter verrà sovrascritto con le
impostazione della tastiera.
Se load è disattivo, tutti i set di parametri vengono trasferiti all’inverter.
NOTE
•
•
5 – 60
Non scollegare la tastiera durante la trasmissione di set di
parametri (verrà visualizzato store , save o load )!
Se la tastiera viene scollegata durante la trasmissione,
apparirà l’indicazione di errore ”Prx” o ”PT5”. (vedere pagina
6 – 6)
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.11 Gestione set di parametri
5.11.2
Sostituzione set di parametri
Funzione 1
Utilizzare gli ingressi digitali per scambiare due set di parametri.
Attivazione
C0007
Set parametri attivi
X3/E2
–10–, –11–, –12–, –13–, – 21–
PAR1
APERTO
PAR2
CHIUSO
–1–, –3–, –6–, –7–, –12–, –24–, –33–,
–38–, –46–, –51–
X3/E3
PAR1
APERTO
PAR2
CHIUSO
Funzione 2
Utilizzare moduli di comunicazione per scambiare quattro set di parametri.
•
•
•
C0135, bit 12/bit 13 (modulo RS232/485)
Tramite modulo bus AIF con C0001 = 3; con AIF–CTRL bit 12/bit 13
Tramite modulo bus FIF con C0005 = 200;
con FIF–CTRL bit 12/bit 13.
Attivazione
Bit 12
Bit 13
Set parametri attivi
APERTO
APERTO
PAR1
CHIUSO
APERTO
PAR2
APERTO
CHIUSO
PAR3
CHIUSO
CHIUSO
PAR4
NOTE
•
•
•
•
L’impostazione di default dell’inverter è PAR1.
Se si cambiano i set di parametri tramite terminale, bisogna
assegnare a PAR gli stessi terminali di tutti i set di parametri.
I codici contrassegnati con * nella tabella codici sono identici
per tutti i set di parametri.
Il set di parametri attivi è indicato sul display della tastiera con
(es. PS 2 ).
Caratteristiche speciali
Se la modalità di controllo (C0014) è impostata diversamente nei set di parametri,
questi dovrebbero essere cambiati soltanto mentre l’inverter non è attivo (CINH).
Matsushita Electric Works Italia
5 – 61
Libreria funzioni
5.12
VF–CE Compatti
Selezione individuale parametri drive: menu utente
5.12 Selezione individuale parametri drive: menu utente
Codice
No.
Possibili impostazioni
Nome
Default
C0094* Password
utente
IMPORTANTE
Selezione
0
C0517*↵ Menu utente
1 Memoria 1
50
C0050
2 Memoria 2
34
C0034
3 Memoria 3
7
C0007
4 Memoria 4
10
C0010
5 Memoria 5
11
C0011
6 Memoria 6
12
C0012
7 Memoria 7
13
C0013
8 Memoria 8
15
C0015
9 Memoria 9
16
C0016
10 Memoria 10
2
C0002
{1}
9999 0 = No protezione password
1 ... 9999 = Accesso libero solo
al menu utente
•Dopo il collegamento del
circuito o utilizzando la
funzione viene
visualizzato il codice in
Frequenza uscita (MCTRL1–NOUT)
C0517/1.
Campo selez. valore rif. analogico
•L’impostazione di default del
menu utente comprende i
Configuraz. segnali ingresso digitali
principali codici per
l’avviamento della modalità
Frequenza uscita minima
“controllo caratteristica V/f
con caratteristica lineare“
Frequenza uscita massima
•Quando la protezione password
è attivata, è possibile
Valore rif. princip. tempo acceleraz.
accedere soltanto ai codici
inseriti in C0517.
Valore rif. princip. tempo deceleraz.
•Inserire i codici richiesti nei
sottocodici.
Frequenza nominale V/f
• vengono inseriti codici non
•Se
Spunto Vmin
presenti, C0050 verrà copiato
nella memoria.
Trasferimento set parametri
Funzione
•
•
Accesso rapido a 10 codici selezionati
Selezione individuale dei 10 codici più importanti per l’applicazione
NOTE
•
•
•
Il menu utente si attiva dopo il collegamento al circuito o il
collegamento della tastiera.
Adattamento del menu utente tramite tastiera: (vedere pagina
4 – 8)
Protezione password: (vedere pagina 4 – 9)
Suggerimento
Se la protezione password è attiva, il menu
utente può essere utilizzato per fornire agli
addetti una serie personalizzata di codici.
Sarà possibile quindi variare soltanto i codici
nel menu utente.
5 – 62
Matsushita Electric Works Italia
VF–CE Compatti
Libreria funzioni
5.12
Selezione individuale parametri drive: menu utente
ESEMPIO
Gli addetti di un nastro convogliatore non possono cambiare
altro che la velocità tramite tastiera ().
– Assegnare C0140 alla memoria 1 del menu utente
(C0517/1 = 140)
– Cancellare tutti gli altri valori del menu utente
(C0517/2...C0517/10 = 0)
– Attivare la protezione password
– Dopo il collegamento della tastiera del circuito principale,
viene visualizzata la velocità effettiva del nastro
convogliatore. La velocità può essere cambiata durante il
funzionamento con i tasti . Il valore di riferimento verrà
memorizzato quando il circuito verrà disattivato.
Matsushita Electric Works Italia
5 – 63
Libreria funzioni
5.12
5 – 64
VF–CE Compatti
Selezione individuale parametri drive: menu utente
Matsushita Electric Works Italia
Capitolo 6
Soluzione dei problemi
ed eliminazione degli errori
6.1
Soluzione dei problemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 3
6.1.1
Display stato di funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 3
6.1.2
Funzionamento errato del drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 4
6.2
Analisi degli errori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 5
6.3
Messaggi di errore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 6
6.4
Reset dei messaggi di errore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 – 8
Soluzione dei problemi
6–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Soluzione dei problemi
6.1
6.1
Soluzione dei problemi
Soluzione dei problemi
Un errore nel funzionamento viene immediatamente indicato tramite il LED dell’inverter
o tramite i dati sullo stato della tastiera. (vedere pagina sezione 6.1.1)
L’errore può essere analizzato con lo storico degli errori. La lista “messaggi di errore”
fornisce informazioni sul modo di eliminare gli errori. (vedere pagina pag. 6 – 6)
6.1.1
Display stato di funzionamento
Tramite 2 LED viene indicato lo stato dell’inverter durante il funzionamento.
LED
verde
on
on
lampeggiante
off
off
lampeggiante
velocemente
Stato di funzionamento
rosso
off
on
off
Lampeggia ogni secondo
Lampeggia ogni 0.4 secondi
off
Matsushita Electric Works Italia
Inverter attivo
Circuito principale attivo ed avvio automatico disinserito
Inverter bloccato
Errore, controllare C0161
Spegnimento sotto tensione
Identificazione parametro motore
6–3
Soluzione dei problemi
6.1
6.1.2
VF–CE Compatti
Soluzione dei problemi
Funzionamento errato del drive
Malfunzionamento Causa
Il motore non gira Tensione bus DC troppo bassa
Led rosso lampeggiante ogni 0.4 s, sul
display tastiera : LU)
Inverter bloccato
(Led verde lampeggiante, sul display
tastiera: )
Rimedio
Pagina
Controllare la tensione del circuito
principale
Rimuovere il blocco dell’inverter. Il
blocco dell’inverter può essere
impostato in vari modi
5 – 16
Blocco avvio automatico (C0142 = 0 o 2) Contatto APERTO–CHIUSO a X3/28
Se necessario, correggere le
condizioni di avvio (C0142)
Il motore non
funziona
correttamente
Consumo di
corrente troppo
alto
Rotazione motore
“0”
6–4
Freno ad iniezione DC (DCB) attivo (sul
display tastiera: )
Disattivare il freno ad iniezione DC
Freno motore meccanico non in rilascio
Rilascio manuale o elettrico del freno
motore meccanico
Stop veloce attivo (QSP) (sul display
tastiera: )
Rimuovere lo stop veloce
5 – 22
Punto di riferimento = 0
Selezionare punto di riferimento
5 – 26
segg.
Punto di riferimento JOG attivo e
frequenza JOG = 0
Selezionare punto di riferimento JOG 5 – 34
Errore attivo
Attivo errato set paramenti
Eliminare l’errore
Sostituire con il set paramentri
corretto tramite terminale
6–6
5 – 24
Modo di controllo C0014 = –4–, –5–,
senza identificazione parametro motore
Identificare il parametro motore
5 – 38
5–3
Quando si utilizza X3/20 come fonte
Collegare a ponte i terminali
tensione interna con i moduli standard
I/U, PROFIBUS–DP od il modulo RS485:
Manca il ponte fra X3/7 e X3/39
Cavo motore difettato
Controllare il cavo del motore
Max. corrente C0022 e C0023 impostata Adattare all’applicazione
ad un valore troppo basso
5 – 24
5 – 18
Motore sottoeccitato o sovraeccitato
Controllare l’impostazione dei
paramentri (C0015, C0016, C0014)
5–3
segg.
C0084, C0087, C0088, C0089, C0090,
C0091 e/o C0092 non adatti ai dati
motore
Impostazione troppo alta di C0016
Impostazione troppo bassa di C0015
C0084, C0087, C0088, C0089, C0090,
C0091 e/o C0092 non adatti ai dati
motore
Con la funzione della tastiera è stato
selezionato un punto di riferimento
Adattare manualmente o identificare
i parametri motore
5 – 38
Impostare correttamente
Impostare correttamente
Adattare manualmente o identificare
i parametri motore
5–7
5–6
5 – 38
Impostare il punto di riferimento a ”0” 5 – 35
con C0140 = 0
Matsushita Electric Works Italia
VF–CE Compatti
Soluzione dei problemi
6.2
6.2
Analisi degli errori
Analisi degli errori
Lo storico degli errori è utilizzato per tracciare gli errori. I messaggi di errore sono
immagazzinati nello storico degli errori nell’ordine in cui arrivano.
L’informazione memorizzata può essere estratta tramite codice.
Struttura dello storico degli errori
Codice
C0161
C0162
C0163
C0164
Informazione
memorizzata
Informazione
memorizzata 1
Informazione
memorizzata 2
Informazione
memorizzata 3
Informazione
memorizzata 4
Matsushita Electric Works Italia
Significato
Note
Errore attivo
Se si riconosce l’errore:
• Le informazioni memorizzate 1–3 saranno salvate in
una posizione superiore
• L’informazione memorizzata 4 sarà eliminata dallo
storico degli errori e non potrà più essere letta.
• L’informazione memorizzata 1 sarà cancellata (=
nessun errore attivo)
Ultimo errore
Penultimo errore
Terz’ultimo errore
6–5
Soluzione dei problemi
6.3
Messaggi di errore
6.3
Messaggi di errore
Display
Tastiera
VF–CE Compatti
Errore
Causa
Intervento
–
Forti interferenze sui cavi di
controllo
–
Cavi di controllo schermati
PC1)
noer
ccr
0
71
Nessun errore
Errore di sistema
ce0
61
Errore di
comunicazione con
AIF
EEr
91
Errore esterno
(TRIP–Set)
Attivazione segnale digitale per
impostazione TRIP
H05
id1
105
140
Errore interno
Identificazione
parametro errato
Motore non collegato
LP1
32
Errore di fase del
motore (TRIP)
• Errori in uno o fasi motore
• Corrente motore troppo bassa
182
Errore di fase del
motore (avviso)
• Controllare i cavi motore,
• Vmin sovraalimentazione,
• collegare il motore alla potenza
corrispondente o adattare il motore a
C0599.
Tensione troppo bassa del circuito
principale
Controllare la tensione del circuito
principale
Tensione bus DC troppo bassa
Controllore a 400 V collegato ad
un circuito di 240 V
Controllare il modulo fornito
Collegare l’inverter alla tensione del
circuito principale adatta
Corto circuito
Trovare la ragione del corto circuito;
controllare il cavo motore
Eccessivo carico di corrente sul
cavo motore
Utilizzare cavi motore più corti e
corrente di carico più bassa
Fase motore a massa
Eccessivo carico di corrente sul
cavo motore
Controllare il motore ed il cavo motore
Utilizzare cavi motore più corti e
corrente di carico più bassa
LU
OC1
OC2
OC3
1030 Sottotensione bus
DC (solo messaggio
senza TRIP)
11
12
13
OC4
14
OC5
15
OC6
16
Corto circuito
Errore nel
collegamento a
massa
Sovraccarico
dell’inverter durante
l’accelerazione o il
corto circuito
Anelli nei cavi di terra o massa
Trasmissione errata di comandi di
controllo via AIF
Tempo di accelerazione troppo
breve (C0012)
Cavo motore difettato
Errore nei giri del motore
Sovraccarico inverter Tempo di decelerazione troppo
durante la
breve (C0013)
decelerazione
Sovraccarico inverter Sovraccarico lungo e frequente
in funzione
stazionaria
Sovraccarico motore Il motore si sovraccarica per es. per
(I2 x t )
i seguenti motivi:
Inserire il modulo di comunicazione nel
terminale a mano
Controllo encoder esterno
Contattare Matsushita
Collegare il motore
E’ possibile disattivare il rilevamento di
errori nel collegamento a massa per
eventuali test
(vedere pagina 5 – 55)
• Aumento del tempo di accelerazione
• Controllo selezione drive
Controllo cablaggio
Controllo motore
• Aumento del tempo di decelerazione
• Controllo dimensione resistore freno
eterno
Controllare la selezione del drive
• corrente continua non ammessa • Controllo selezione drive
• processi di accelerazione troppo
• Controllo impostazione di C0120
lunghi o frequenti
6–6
Matsushita Electric Works Italia
VF–CE Compatti
Soluzione dei problemi
6.3
Display
Tastiera
Errore
Causa
Messaggi di errore
Intervento
PC1)
• Permettere all’inverter di
raffreddarsi ed assicurare una
migliore ventilazione
• Controllare la temperatura
ambiente
Vaschetta per il calore molto sporca Pulirle la vaschetta
Elevate correnti non ammesse o
• Controllare la selezione del drive
accelerazioni troppo frequenti o
• Controllare carico e se necessario
troppo lunghe
sostituire i cuscinetti difettati
Motore troppo caldo per le
Controllare la selezione del drive
eccessive correnti o accelerazioni
frequenti e troppo lunghi
OH
50
Temperatura interna Temperatura ambiente Tamb
inverter > +85° C
> +60° C
OH3
53
Monitoraggio PTC
(TRIP)
OH4
54
Sovratemperatura
dell’inverter
Interno dell’inverter troppo caldo
• Ridurre il carico dell’inverter
• Migliorare il raffreddamento
• Controllare la ventola nell’inverter
OH51
203
Monitoraggio PTC
(avviso)
PTC non collegato
Collegare PTC o disattivare il
monitoraggio
OU
1020 Sovratensione bus Tensione circuito troppo alta
DC (solo messaggio Funzione freno
senza TRIP)
Dispersione a terra sul lato motore
Pr
75
Pr1
72
Pr2
73
Pr3
77
Pr4
78
Pr5
Pt5
79
81
rSt
76
Errore nel reset
TRIP automatico
sd5
85
Circuito aperto in
ingresso analogico
( 4 ... 20 mA)
1)
Trasferimento errato
dei parametri
tramite tastiera
Trasferimento errato
PAR1 tramite
tastiera
Trasferimento errato
PAR2 tramite
tastiera
Trasferimento errato
PAR3 tramite
tastiera
Trasferimento errato
PAR4 tramite
tastiera
Errore interno
Errore di tempo nel
trasferimento del set
parametri
Tutti i set parametri sono difettati
PAR1 difettata
Controllare l’alimentazione
• Prolungare il tempo di
decelerazione
• Per il funzionamento con freno
transistor :
– Controllare la selezione ed il
collegamento del freno transistor
– Aumento dei tempi di
decelerazione
Controllare cavi motore e motore per
un errato collegamento a terra
(scollegare il motore dall’ inverter)
E’ assolutamente necessario ripetere
il trasferimento dati o caricare
l’impostazione di default prima di
attivare l’inverter
PAR2 difettata
PAR3 difettata
PAR4 difettata
Interruzione flusso dati dalla tastiera
o blocco PC per es. manca il
collegamento della tastiera durante
la trasmissione
Più di 8 messaggi di errore in 10
minuti
Corrente con ingresso analogico
< 4 mA
Contattare Matsushita
E’ assolutamente necessario ripetere
il trasferimento dati o caricare
l’impostazione di default prima di
attivare l’inverter
Dipende dal messaggio di errore
Chiudere il circuito con ingresso
analogico
Codice dell’errore
Matsushita Electric Works Italia
6–7
Soluzione dei problemi
6.4
6.4
VF–CE Compatti
Reset dei messaggi di errore
Reset dei messaggi di errore
TRIP
Dopo che è stato eliminato l’errore, il blocco dell’impulso sarà reimpostato solo se TRIP
viene riconosciuto
NOTA
Un TRIP può avere diversi motivi. Il messaggio di errore può
essere riconosciuto solo se tutte le ragioni per il TRIP sono state
eliminate.
Codice
No.
Nome
Impostazioni possibili
Default Selezione
C0043 Reset TRIP
C0170↵ Configurazione
reset TRIP
–0–
–0–
–1–
–0–
Nessun errore di corrente
Errore attivo
Reset TRIP tramite commutazione
del circuito principale, ,
segnale APERTO X3/28, via
modulo funzione o modulo di
comunicazione
–1–
uguale a –0– e reset TRIP
automatico supplementare
–2–
Reset TRIP tramite commutazione
del circuito principale via modulo
funzione o modulo di
comunicazione
Reset TRIP tramite commutazione
del circuito principale
–3–
C0171 Ritardo nel reset
TRIP
automatico
0.00
IMPORTANTE
0.00
{0.01 s}
Reset errore attivo con
C0043 = 0
• Reset TRIP via modulo
funzione o modulo di
comunicazione con C0043 o
C0135 bit 11.
• Reset TRIP automatico dopo
l’impostazione del tempo
secondo C0171.
60.00
Funzione
E’ possibile selezionare se l’errore attivo deve essere rimpostato automaticamente o
manualmente
NOTE
•
•
•
6–8
TRIP viene sempre rimpostato quando si commuta il circuito
principale.
Con più di 8 reset TRIP automatici in 10 minuti, l’inverter
imposta TRIP e indica rST.
TRIP reset rimposta anche l’auto–conteggio TRIP.
Matsushita Electric Works Italia
Capitolo 7
Automazione
7.1
Moduli di comunicazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 – 3
7.2
Funzionamento parallelo delle interfacce AIF e FIF . . . . . . . . . . . . . . . . . . . 7 – 4
Automazione
7–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Automazione
7.1
7.1
Moduli di comunicazione
Moduli di comunicazione
L’automazione con i moduli di comunicazione PROFIBUS AIF e FIF o con il modulo di
comunicazione RS232C/RS485 è descritta nei seguenti manuali:
• PROFIBUS FIF Modulo DP SLAVE – Operating Instructions
ACGM0183END,
• PROFIBUS AIF Modulo DP SLAVE – Operating Instructions
ACGM0182END (in lavorazione)
• RS232C/RS485 Communication Module – Technical Specifications
ACGM0181END.
Matsushita Electric Works Italia
7–3
Automazione
7.2
VF–CE Compatti
Funzionamento parallelo delle interfacce AIF e FIF
7.2
Funzionamento parallelo delle interfacce AIF e FIF
Le due interfacce degli inverter – l’interfaccia per l’automazione (AIF) e l’interfaccia
funzione (FIF) – possono essere utilizzate contemporaneamente in parallelo con
moduli diversi.
Tastiera BFVC 904C
Modulo di comunicazione
BFVC 9503 (RS232/RS485)
Modulo PROFIBUS AIF
BFVC 9901
AIF
FIF
Modulo I/U standard
BFVC 90XY
Modulo PROFIBUS FIF
BFVC 9902
Figura 15: Moduli per interfacce AIF e FIF
Modulo di comunicazione in AIF
Possibili combinazioni
Modulo funzione in FIF
Tastiera
Modulo RS232/RS485
PROFIBUS AIF
I/U Standard
BFVC 90XY
BFVC 904C
ü
BFVC 9503
ü
BFVC 9901
ü
PROFIBUS FIF
BFVC 9902
ü
ü
ο
ü
ο
Combinazione possibile
Combinazione non possibile
Suggerimento
A seconda del livello di hardware degli inverter, è possibile l’alimentazione interna tramite l’interfaccia AIF dei
moduli di comunicazione. Dettagliate informazioni si trovano nelle istruzioni dei moduli di comunicazione.
Le istruzioni di funzionamento dei moduli fieldbus forniscono dettagliate informazioni sull’avviamento e l’impostazione dei parametri per i moduli fieldbus
(vedere pagina 10 – 4)
7–4
Matsushita Electric Works Italia
Capitolo 8
Reti con più drive
8.1
Funzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 3
8.2
Condizioni per un corretto funzionamento in rete . . . . . . . . . . . . . . . . . . . . 8 – 4
8.3
8.4
8.2.1
Collegamento circuito principale . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.1.1 Protezione cavi / Sezione cavi . . . . . . . . . . . . . . . . . . . . . .
8.2.1.2 Ferriti e filtri sull’alimentazione principale / EMC . . . . . .
8.2.1.3 Protezione inverter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.2
Connessione bus DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 6
8.2.3
Sezioni fusibili e cavi per reti drive . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 7
8.2.4
Protezione per le connessioni in rete . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 8
8.6
–
–
–
–
4
4
4
5
Selezione reti di inverter / drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 10
8.3.1
Condizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 10
8.3.2
Ferriti e filtri sull’alimentazione principale . . . . . . . . . . . . . . . . . . . . 8 – 10
8.3.3
Ingresso inverter con potenza 400 V . . . . . . . . . . . . . . . . . . . . . . . 8 – 11
8.3.4
Ingresso inverter con potenza 240 V . . . . . . . . . . . . . . . . . . . . . . . . 8 – 11
8.3.5
Esempi di selezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 11
8.3.5.1 4 drive alimentati via inverter (potenza statica) . . . . . . 8 – 11
8.3.5.2 Selezione processi dinamici . . . . . . . . . . . . . . . . . . . . . . . 8 – 12
Alimentazione centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 15
8.4.1
8.5
8
8
8
8
Alimentazione DC centrale ed esterna . . . . . . . . . . . . . . . . . . . . . . 8 – 15
Alimentazione decentralizzata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 16
8.5.1
Alimentazione decentralizzata per mono e bifase . . . . . . . . . . . . . 8 – 16
8.5.2
Alimentazione decentralizzata per trifase . . . . . . . . . . . . . . . . . . . . 8 – 17
Funzionamento del freno in rete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 18
8.6.1
Possibilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 18
8.6.2
Selezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 – 19
Reti con più drive
8–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.1
8.1
Funzione
Funzione
Questo capitolo descrive la selezione dei sistemi con inverter serie VF–CE.
•
•
•
La rete bus DC degli inverter permette lo scambio di energia tra gli
inverter collegati ad un livello di tensione DC
Se uno o più inverter funziona in modo generatore (in frenata),
l’energia recuperata sarà alimentata nel bus di tensione DC
condivisa o dall’alimentazione DC. L’energia sarà disponibile nelle
reti di inverter che funzionano in modo motore.
L’energia derivante dal circuito trifase in AC può essere fornita
come segue:
– Attraverso un modulo di alimentazione rigenerativo in una
rete di più drive/inverter
– Tramite uno o più inverter in rete
– Tramite la combinazione di moduli di alimentazione
rigenerativi e inverter
•
•
Si può ridurre il consumo di energia attraverso il circuito trifase in
AC, l’uso di freni e di alimentatori.
Il numero delle alimentazioni al circuito principale e le relative
spese (per es. per il cablaggio) si possono adattare perfettamente
alla vostra applicazione.
Matsushita Electric Works Italia
8–3
Reti con più drive
8.2
VF–CE Compatti
Condizioni per un corretto funzionamento in rete
8.2
Condizioni per un corretto funzionamento in rete
Collegare solo gli inverter con bus DC o campi di tensione del
circuito principale simili (vedere la tabella sottostante)
Adattare le soglie del freno e del transistor a freno
Funzionamento possibile solo con alimentazioni da ferriti e
filtri del circuito principale previsti! (vedere pagina 8 – 10)
!
8.2.1
Collegamento circuito principale
8.2.1.1
Protezione cavi / Sezione cavi
I fusibili ed i cavi del circuito principale devono essere selezionati in base alla corrente
del circuito risultante dalla potenza in ingresso PDC100%. Osservare gli standard
nazionali, le temperature e le altre condizioni. (vedere pagina 8 – 7)
Asimmetrie nella rete possono richiedere espansioni dal 135 al 150%.
Formula per la corrente del circuito in rete:
I circuito [A] [
8.2.1.2
P DC100% [W]
1.5 @ V circuito [V]
Ferriti e filtri sull’alimentazione principale / EMC
Utilizzare ferriti e bobine assegnati alla funzione rete. (vedere pagina 8 – 10)
Funzione:
•
•
Limitazione corrente circuito principale
Simmetria corrente/potenza dei circuiti principali d’ingresso degli
inverter nelle reti decentralizzate.
La ferrite ed il filtro devono adattarsi alla corrente del circuito.
8–4
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.2 Condizioni per un corretto funzionamento in rete
NOTE
•
•
8.2.1.3
Tenere presente che il funzionamento in rete richiede a volte
altre ferriti e filtri diversi per il circuito principale
Non è garantita la conformità alle norme EMC. Controllare se
si deve usare una soppressione centrale delle interferenze
nell’alimetazione AC.
Protezione inverter
Condizioni per la commutazione
Assicurare un collegamento simultaneo dei circuiti principali di tutti gli inverter connessi
in rete. Utilizzare un contatore centrale (vedere pagina 8 – 17). La commutazione
decentralizzata dei circuiti principali possibile se l’attivazione di ogni contatore singolo
è monitorizzata (feedback a ritorno di segnale a PLC) e la commutazione segue lo
stesso ciclo.
PLC
Figura 16: Commutazione decentralizzata dell’alimentazione per una rete di drive
A1 ... An
Inverter 1 ... inverter n
F1 ... F3
Fusibili circuito
F4 ... F5
Fusibili in DC
K1 ... Kn
Contatori circuito
Rilevamento danni nel circuito con alimentazione decentralizzata
Monitorare l’alimentazione del circuito di ogni inverter altrimenti tutti i collegamenti attivi
in ingresso al momento del rilevamento del danno possono essere sovraccaricati.
Pertanto :
continua
Matsushita Electric Works Italia
8–5
Reti con più drive
8.2
VF–CE Compatti
Condizioni per un corretto funzionamento in rete
•
•
Disattivare l’intera rete quando si rileva un danno nel circuito o in
una fase. (vedere pagina 8 – 17)
Utilizzare elementi di commutazione per il rilevamento e
l’indicazione dei danni al circuito
– Disinnesto sovraccorrente termica (relè bimetallico)
collegata dopo i fusibili del circuito.
– Protezione dei cavi con interruttori di potenza a disinnesto
termico e magnetico e con contatto di allarme incorporato.
Capacità supplementari nel bus DC
L’uso delle capacità supplementari del DC bus può sovraccaricare il rettificatore in
ingresso dell’inverter o l’unità di alimentazione rigenerativa.
Fornirsi pertanto di resistori simmetrici di carico.
8.2.2
Connessione bus DC
•
•
Utilizzare un cavo corto per collegarsi al bus DC.
Selezionare la sezione cavi del bus DC a seconda del numero di
alimentazioni del circuito.
Esempio
3AC/PE/xxx V/xx Hz
Alimentazione
circuito
F1...F3
3 x 16A
3 x 50A
3 x 125A
DC bus
F4, F5
•
Inverter 1
Inverter 2
Inverter 3
M
M
M
• Somma delle possibili
correnti permanenti per le
alimentazioni parallele del
circuito : 16A + 50A +
125A = 191A
• La sezione cavo è
selezionata a seconda
della corrente 191 A e
delle condizioni
ambientali: temperatura,
materiale e tipo del
conduttore , percorso
messaggi, espansioni,
standard e norme.
Assicurare una bassa induttività del cavo.
– Connessione in parallelo bus DC e barra collettrice.
– I cavi tra l’ inverter (+UG, –UG) e bus DC devono essere
in parallelo o intrecciati
•
•
Utilizzare cavi schermati.
I fusibili (F4 e F5) proteggono l’inverter da:
continua
8–6
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.2 Condizioni per un corretto funzionamento in rete
– corto circuiti interni,
– collegamento a terra difettoso,
– corto circuito in bus DC +UG –UG,
– collegamento a terra difettoso in bus DC +UG PE o –UG PE.
NOTE
•
•
•
8.2.3
Con soli due inverter collegati in rete una coppia di fusibili
F4/F5 è sufficiente. Per i dati di funzionamento si tengono in
considerazione le caratteristiche dell’inverter più piccolo.
Se si utilizzano più di due inverter in rete collegare un’altra
coppia di fusibili F4/F5.
Per ulteriori informazioni vedere: (vedere pagina 8 – 8)
Sezioni fusibili e cavi per reti drive
I valori della tabella sono validi per il funzionamento degli inverter in reti bus DC con
PDC = 100%, per es. si può usare la potenza nominale massima dell’inverter sul bus
DC. (vedere pagina 8 – 10)
In caso di funzionamento con potenza ridotta è possibile selezionare sezioni cavi e
fusibili minori.
Ingresso circuito L1, L2, L3, PE
Tipo
Ingresso DC +UG, –UG
Funzionamento con filtro e ferrite del circuito
Fusibili F1, F2, F3
VDE
UL
E.l.c.b.
Sezione cavo 1)
VDE
mm2
AWG
Fusibili F4, F5
Sezione cavo 1)
mm2
AWG
BFVCE0072A
M 6A
5A
B 6A
1.5
15
CC8A
1
17
BFVCE0152A
M 10A
10A
B 10A
1.5
15
CC12A
1.5
15
BFVCE0222A
M 16A
15A
B 16A
2.5
14
CC16A
2.5
14
BFVCE0074A
M 6A
5A
B 6A
1
17
CC6A
1
17
BFVCE0154A
M 10A
10A
B 10A
1.5
15
CC8A
1
17
BFVCE0224A
M 10A
10A
B 10A
1.5
15
CC10A
1
17
BFVCE0404A
1)
in preparazione
Fare attenzione alle norme nazionali e regionali (per es. VDE0113, EN 60204)!
NOTA
In caso di alimentazione decentralizzata si raccomanda l’uso di
contenitori per fusibili con contatti d’allarme per i fusibili DC.
L’intera rete drive può essere disattivata in caso di danni al
fusibile.
Matsushita Electric Works Italia
8–7
Reti con più drive
8.2
VF–CE Compatti
Condizioni per un corretto funzionamento in rete
8.2.4
Protezione per le connessioni in rete
E’ possibile selezionare il grado di protezione per la rete. I rischi di danni dipendono dal
tipo di protezione. La seguente tabella aiuta ad analizzare i rischi.
NOTE
Sul lato motore la protezione del cavo è supportata dal limite di
corrente dell’inverter.
Condizione:
• Il limite di corrente impostato per l’inverter corrisponde alla
corrente nominale del motore collegato.
•
Per i drive si raccomanda l’uso di protezioni supplementari.
Definizione: “errore interno”
•
•
Inverter:
L’errore è rilevato tra il punto di connessione sul bus DC e l’interno
dell’unità sui terminali U, V, W.
Moduli di alimentazione:
L’errore è rilevato tra l’ingresso del circuito (terminali L1, L2, L3)
ed il punto più lontano del bus DC .
Protezione tramite fusibili senza funzione di monitoraggio (F1 ... F3)
Tipo di
protezione
Protezione cavo
• sul lato del circuito
• sul bus DC
• sul lato motore
Errori possibili
Uno o più inverter con
• corto circuito interno (+UG→ –UG)
• collegamento interno a terra difettoso (+UG→ PE/–UG→ PE)
• collegamento a terra difettoso sul lato motore in fase W
Danni al circuito di un inverter
con alimentazione
decentralizzata
Rischio
Diversi inverter alimentati in parallelo rilevano la posizione
degli errori via bus DC . Questo può sovraccaricare l’inverter
intatto in quanto l’inverter difettato non è selezionabile sul
bus DC. Danni possibili con alimentazione centrale e
decentralizzata:
• distruzione dell’inverter
• distruzione degli inverter ancora intatti
• distruzione dell’unità di alimentazione
Se l’alimentazione in ingresso
sul lato del circuito non è
corretta perchè F1..F3 si sono
bruciati, l’inverter attivo si può
sovraccaricare.
Nota
Il grado di distruzione dipende dal rapporto fra la potenza del bus DC dell’intero sistema
e la potenza nominale dell’inverter.
8–8
Nessuna protezione
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.2 Condizioni per un corretto funzionamento in rete
Protezione tramite fusibili con funzione di monitoraggio (F1 ... F3)
Tipo di
protezione
Protezione cavo
• sul lato circuito
• sul bus DC
• sul lato motore
Protezione unità in caso di
Nessuna protezione in caso di
sovraccarico
corto circuito
In caso di danni all’alimentazione
perchè F1..F3 si sono bruciati, gli
inverter rimanenti che sono
collegati non si
sovraccaricheranno in quanto il
contatto d’allarme disattiverà il
circuito e l’intera rete.
Errori possibili
Uno o più inverter con
• corto circuito interno (+UG → –UG)
• collegamento interno a terra difettato (+UG → PE/–UG → PE)
• collegamento interno a terra difettato in fase W
Rischio
Diversi inverter alimentati in parallelo rilevano la posizione degli errori via bus DC . Questo può
sovraccaricare l’inverter intatto in quanto l’inverter difettato non è selezionabile sul bus DC. Danni
possibili con alimentazione centrale e decentralizzata:
• distruzione dell’inverter
• distruzione degli inverter ancora intatti
• distruzione dell’unità di alimentazione
Nota
Il grado di distruzione dipende dal rapporto fra la potenza del bus DC dell’intero sistema e la
potenza nominale dell’inverter.
Protezione tramite fusibili con funzione di monitoraggio (F1 ... F3)
e fusibili DC F4 ... F5
Tipo di
protezione
Protezione cavo
• sul lato circuito
• sul bus DC
• sul lato motore
Errori possibili
Uno o più inverter con
– corto circuito interno (+UG → –UG)
– collegamento interno a terra difettato (+UG → PE/–UG → PE)
– collegamento interno a terra difettato in fase W
Rischio
Danni possibili con alimentazione centrale e decentralizzata
• Distruzione dell’inverter
La possibilità di selezionare l’attivazione e disattivazione del circuito riduce i roschi di danni
Nota
Matsushita Electric Works Italia
Protezione unità in caso di
Con protezione in caso di
sovraccarico
corto circuito
In caso di danni all’alimentazione
perchè F1..F3 si sono bruciati, gli
inverter rimanenti che sono
collegati non si
sovraccaricheranno in quanto il
contatto d’allarme disattiverà il
circuito e l’intera rete.
8–9
Reti con più drive
8.3
VF–CE Compatti
Selezione reti di inverter / drive
8.3
Selezione reti di inverter / drive
Nella tabella seguente si trovano alcune indicazioni base per selezionare una rete per
drive. Due esempi spiegano l’uso delle tabelle.
8.3.1
Condizioni
Le indicazioni della tabella nella sezione 8.3.3 sono valide solo se la rete corrisponde
alle seguenti condizioni:
Condizioni generali
Tutte le alimentazioni
Collegamento al circuito trifase AC solo con filtri e ferriti del circuito indicati.
(vedere pagina pagina 8 – 10)
Tensione circuito princiaple
Frequenza
Temperatura ambiente durante il
funzionamento
Vcircuito = 400 V / 50 Hz (vedere sezione 8.3.3)
VF–CE
4 kHz o 8 kHz.
max. +40° C
Motori (trifase asincrono AC,
servomotore asincrono,
servomotore sincrono)
Fattore di simultaneità Fg = 1
(Contemporaneamente tutti i motori sono caricati al 100%)
8.3.2
Filtri e ferriti sull’alimentazione principale
La tabella seguente indica i filtri e le ferriti previsti per l’alimentazione delle reti.
Unità
Tipo
Filtro/ferrite alimentazione
Corrente circuito [A] Induttività [mH]
Corrente nominale [A]
BFVCE0074A
2.4
15
2.5
BFVCE0154A
5.5
5
7
BFVCE0224A
6.0
5.0
7
BFVCE0404A
9.5
3.0
13
8 – 10
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.3
8.3.3
Selezione reti di inverter / drive
Ingresso inverter con potenza 400 V
Ingressi in rete di inverter con potenza 400 V
BFVCE0074A
BFVCE0154A
Ingresso 1
PV [kW]
PDC100%
[kW]
BFVCE0224A
BFVCE0404A
0.06
2.0
0.1
2.0
0.24
6.2
0.13
4.1
1.6
1.5
2.9
4.9
1.6
3.2
5.3
3.4
3.1
5.1
Ingresso 2... n
BFVCE0074A
BFVCE0154A
BFVCE0224A
BFVCE0404A
Utilizzo della tabella:
1. Determinare PDC100% con il valore dalla linea 4 per il primo ingresso.
2. Determinare la potenza degli altri ingressi possibili con i valori della colonna
corrispondente
Vuoto: non è possibile combinare gli ingressi
8.3.4
Ingresso inverter con potenza 240 V
In preparazione
8.3.5
Esempi di selezione
8.3.5.1
4 drive alimentati via inverter (potenza statica)
Dati drive
Drive
Drive 1
Drive 2
Drive 3
Drive 4
Tipo di inverter
BFVCE0074A
BFVCE0154A
BFVCE0224A
BFVCE0404A
Motore PM
0.75 kW
1.5 kW
2.2 kW
4.0 kW
Efficienza
η = 0.9
continua
Matsushita Electric Works Italia
8 – 11
Reti con più drive
8.3
VF–CE Compatti
Selezione reti di inverter / drive
Procedimento:
1.
Determinare la potenza DC necessaria:
Perdita di potenza PV (vedere pagina sezione 8.3.3).
ǒ
ȍ
4
PDC +
i+1
PM
i
h ) P Vi
Ǔ
PDC + 0.75 kW ) 0.06 kW ) 1.5 kW ) 0.1 kW ) 2.2 kW ) 0.13 kW )
0.9
0.9
0.9
4.0 kW ) 0.24 kW + 9.92 kW
0.9
2.
Determinare il primo ingresso:
PDC100% (vedere pagina sezione 8.3.3).
BFVCE0074A BFVCE0154A BFVCE0224A BFVCE0404A
PDC100%
2.0 kW
2.0 kW
4.1 kW
6.2 kW
Il primo ingresso selezionato è BFVCE0404A.
Potenze d’ingresso supplementari: 9.92 kW – 6.2 kW = 3.72 kW
3.
Determinare il secondo ingresso:
Leggere la potenza d’ingresso per BFVCE0224A, BFVCE0154A, e
BFVCE0074A nella colonna “BFVCE0404A” della tabella nella
sezione 8.3.3.
BFVCE0224A BFVCE0154A BFVCE0074A
PDC2
3.1 kW
non possibile
non possibile
La potenza di BFVCE0224A è abbastanza alta.
4.
Risultato:
Questa rete di drive deve essere collegata al circuito trifase AC
tramite gli inverter BFVCE0404A e BFVCE0224A.
8.3.5.2
Selezione processi dinamici
NOTE
•
•
8 – 12
Le indicazioni di questo capitolo si applicano solo a sequenze
di movimento coordinato! Per tutte le altre applicazioni la rete
deve essere selezionata per potenza statica. (vedere pagina
8 – 11)
Gli inverter si possono danneggiare se non sono selezionati
per processi dinamici.
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.3
Selezione reti di inverter / drive
Se si richiedono processi dinamici nelle reti per drive (funzionamento dei motori con
cambio di potenza), si possono ridurre le alimentazioni.
Per la selezione delle alimentazioni sono molto importanti la potenza permanente PDC
e la forza motrice massima Pmax della rete:
1.
Rilevamento della potenza permanente
Con il metodo grafico si ottengono generalmente valori esatti.
(vedere pagina 8 – 14)
Calcolo approssimativo
ȍǒP
n
PDC [
i
@ t iǓ
i+1
T
Importante
Questo calcolo non è valido per le reti con
cambiamenti di carico e per inverter con fasi di
riposo
T [s]: Tempo ciclo
Pi [W]: Potenza durante un ciclo
ti [s]: Periodo di Pi durante un ciclo
2.
Rilevamento grafico della forza motrice massima (vedere
pagina 8 – 14)
3.
Perdite di potenza
Le perdite di potenza di tutti gli inverter collegati in rete devono essere
considerate per il calcolo della potenza permanente e della forza
motrice massima. (vedere pagina 8 – 10)
4.
Selezione alimentazioni
Selezione inverter e/o unità di alimentazione a reazione. (vedere
pagina 8 – 11)
Tenere presente che il sovraccarico massimo (max. 60s) delle
alimentazioni deve essere più alto della forza motrice massima della
rete.
continua
Matsushita Electric Works Italia
8 – 13
Reti con più drive
8.3
VF–CE Compatti
Selezione reti di inverter / drive
P2
P1
RP
Pmax
t
t
PDC
t
PBmax
Figura 17: Esempio con 2 drive che accelerano e decelerano simultaneamente
P1:
Potenza del primo drive
P2:
Potenza del secondo drive
RP:
Somma potenze
PBmax :
Forza motrice massima del freno della rete del drive
Forza motrice massima del drive di rete
Pmax :
PDC
Potenza continua
P2
P1
t
t
RP
Pmax
PDC
PBmax
t
Figura 18: Esempio con 2 drive che accelerano e decelerano in sequenza
P1:
Potenza del primo drive
P2:
Potenza del secondo drive
RP:
Somma potenza della rete
PBmax :
Forza motrice massima del freno della rete del drive
Pmax:
Forza motrice massima del drive di rete
PDC
Potenza continua
Nella figura 18 il valore della forza motrice massima (Pmax e PBmax) è superiore a quello
della figura 17.
8 – 14
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.4
8.4
Alimentazione centrale
Alimentazione centrale
Il bus DC degli inverter è alimentato centralmente tramite +UG, –UG. Le alimentazioni
sono:
•
Reti di inverter a 240 V
– 1 alimentazione DC
•
Reti di inverter a 400 V
– 1 alimentazione DC
– 1 unità di alimentazione a reazione
– 1 inverter con potenza di riserva
8.4.1
Alimentazione DC centrale ed esterna
+
–
PE
F4
PE L1 L2 L3 –UG
F5
+UG
F4
F5
PE L1 L2 L3 –UG +UG
A1
A2
U V W
U V W
Figura 19: Schema circuito principale: Rete di inverter a 240 V con alimentazione DC centrale ed esterna
A1, A2
inverter a 240 V serie VF–CE
F4, F5
Fusibili (vedere pagina pagina 8 – 7)
NOTE
Per un corretto funzionamento attenersi alle seguenti condizioni:
•
•
Regole generali (vedere pagina pagina 8 – 4)
Flusso di tensione +UG " PE / –UG " PE simmetrico!
– L’inverter verrà distrutto se +UG o –UG sono a
massa.
Matsushita Electric Works Italia
8 – 15
Reti con più drive
8.5
VF–CE Compatti
Alimentazione decentralizzata
8.5
Alimentazione decentralizzata
Il bus DC degli inverter è alimentato tramite +UG, –UG da diversi inverter collegati in
parallelo al circuito principale. Inoltre con un’unità di alimentazione si può usare un
circuito a 400 V .
8.5.1
L1
N/L2
PE
Alimentazione decentralizzata per mono e bifase
K10
K10*
F1 F1*
F1 F1*
Z1 Z1*
Z1 Z1*
F4 F5
PE L1 L2 L3 –UG +UG
F4 F5
PE L1 L2 L3 –UG +UG
A1
A2
U V W
U V W
Figura 20: Schema circuito principale: Rete inverter a 240 V con alimentazione decentralizzata per mono o bifase
collegamento al circuito principale
A1, A2
inverter a 240 V serie VF–CE
Z1, Z1*
Filtro e bobina del circuito principale (vedere pagina pagina 8 – 10)
F1, F1*
Fusibili del circuito (vedere pagina pagina 8 – 7)
F4, F5
Fusibili DC (vedere pagina pagina 8 – 7)
K10, K10*
Contatore del circuito principale
F1*, K10*, Z1*
Solo se collegato a 2AC PE 100 V – 0 % ... 260 V +0 %, 48 Hz –0 %... 62 Hz +0 %
NOTE
Per un corretto funzionamento attenersi alle seguenti condizioni:
•
•
•
Regole generali (vedere pagina pagina 8 – 4)
Collegamento in fase dal lato del circuito principale!
Con alimentazione bifase
– Protezione cavo e sovraccarico tramite fusibile F1*.
– Assicurare la simmetria tra corrente e potenza
tramite filtro e bobina Z1*.
8 – 16
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.5
8.5.2
Alimentazione decentralizzata
Alimentazione decentralizzata per trifase
K1
L1
L2
L3
N
PE
OFF
S1
K1
F1 F2 F3
Z4
RB
ON
S2
Z1
Z1
ϑRB
S1
S2
F4 F5
RB1 RB2
K1
PE +UG–UG
L1
L2
Z3
L3
L1
PE+UG –UG
L2
PE
2
8
x
x
PE U V W
K1
X1
PE
2
8
x
x
K1
X2
CINH
PE
PE +UG –UG
A2
A1
PE U V W
L3
M
3~
CINH
PE
M
3~
Figura 21: Schema circuito principale: Rete di drive in trifase con alimentazione decentralizzata e freno supplementare
A1, A2
Z1
Z3
Z4
F1, F2, F3
F4, F5
K10
inverter a 240 V serie VF–CE o inverter a 400 V serie VF–CE
Filtro e bobina del circuito (vedere pagina pagina 8 – 10)
Freno (vedere pagina pagina 10 – 3)
Resistore freno (vedere pagina pagina 10 – 3)
Fusibili del circuito (vedere pagina pagina 8 – 7)
Fusibili DC (vedere pagina pagina 8 – 7)
Contatore circuito principale
Suggerimento
In sostituzione al freno si può usare un’unità
di alimentazione del circuito principale a
400V. Il vantaggio è che non viene generato
calore.
Matsushita Electric Works Italia
8 – 17
Reti con più drive
8.6
VF–CE Compatti
Funzionamento del freno in rete
8.6
8.6.1
Funzionamento del freno in rete
Possibilità
Se l’energia generata dal freno non viene dissipata, la tensione nel DC bus aumenta.
Un eccessivo aumento della tensione blocca l’inverter ed appare il messaggio
“sovracorrente”. L’energia generata dal freno può essere dissipata in vari modi:
Applicazioni con
Caratteristiche speciali
• L’energia del freno ritorna al circuito di
alimentazione principale
• Non si genera calore
Frenata a bassa potenza frequente • Resistore freno integrato
Frenata a media potenza rara
• Non è necessaria nessun’altra contromisura
• Esempio: vedere pagina 8 – 17
Unità rigenerativa
Lunga frenata
Moduli freno
• Fornirsi di resistore freno esterno
• I resistori freno possono scaldarsi molto, pertanto
prendere delle contromisure
• Esempio: vedere pagina 8 – 17
Frenata a bassa potenza frequente • vedere pagina 9 – 3
Frenata a media potenza rara
Freno
Frenata ad alta potenza frequente
Frenata lunga e ad alta potenza
Resistore freno
sull’inverter
NOTE
Possibilità di dissipazione dell’energia della frenata in una rete:
• non deve essere combinata.
•
deve essere utilizzata una volta soltanto (per es. non collegare
due moduli freno in parallelo)
Diversamente i componenti della rete potrebbero danneggiarsi.
8 – 18
Matsushita Electric Works Italia
VF–CE Compatti
Reti con più drive
8.6
8.6.2
Funzionamento del freno in rete
Selezione
La selezione dei componenti per la frenata dipende dalla potenza permanente del
freno, dalla forza motrice massima del freno e dall’applicazione.
La potenza permanente del freno e la forza motrice massima si possono rilevare
graficamente:
•
•
Esempio: (vedere pagina pagina 8 – 14)
Se disponibile utilizzare la funzione “emergenza disinserita”
Con l’uso di un resistore freno o di un modulo freno è possibile bloccare il
funzionamento in caso di surriscaldamento. I loro termostati vengono impiegati:
•
•
•
per scollegare tutti gli inverter della rete dal circuito principale.
per impostare il blocco (CINH) (terminale 28 = APERTO) in tutti gli
inverter
esempio: (vedere pagina pagina 8 – 17)
Suggerimento
Frenata successive dei singoli drive della
rete possono ridurre la potenza permanente
e la forza motrice massima.
Tenere presente la capacità di sovraccarico
dell’alimentazione rigenerativa e del ciclo di
funzionamento del resistore freno.
Matsushita Electric Works Italia
8 – 19
Reti con più drive
8.6
8 – 20
VF–CE Compatti
Funzionamento del freno in rete
Matsushita Electric Works Italia
Capitolo 9
Operazione di frenatura
9.1
9.2
Funzionamento del freno con resistore esterno . . . . . . . . . . . . . . . . . . . . . . 9 – 3
9.1.1
Modelli disponibili nella gamma Matsushita . . . . . . . . . . . . . . . . . . . 9 – 3
9.1.2
Valori nominali del freno con transistor incorporato . . . . . . . . . . . 9 – 4
Resistenze di frenatura Matsushita: esempi applicativi . . . . . . . . . . . . . . . . 9 – 6
Operazione di frenatura
9–2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Operazione di frenatura
9.1
9.1
Funzionamento del freno con resistore esterno
Funzionamento del freno con resistore esterno
Sono necessarie resistenze di frenatura in elevati momenti di inerzia o in lunghi periodi
di funzionamento nel modo generatore. Convertono l’energia meccanica del freno in
calore.
Il freno transistor incorporato nell’inverter attiva la resistenza esterna quando la
tensione bus DC eccede il valore di soglia. In questo modo l’inverter non imposta “il
blocco impulsi” in caso di sovratensione ed il drive non si arresta. Grazie alla resistenza
esterna la frenata è sempre controllata.
NOTA
Per frenate senza resistore vedere pagina 5 – 24. Si può
configurare la funzione “freno ad iniezione DC” per piccole
masse.
9.1.1
Modelli disponibili nella gamma Matsushita
Descrizione
Codice prodotto
inverter monofase 0.25–1.5kW
BFVC 9161U
inverter monofase 2.2kW
BFVC 9162U
inverter trifase 0.75–1.5kW
BFVC 9164U
inverter trifase 2.2kW
BFVC 9165U
inverter trifase 4.0kW
BFVC 9166U
Matsushita Electric Works Italia
9–3
Operazione di frenatura
9.1
VF–CE Compatti
Funzionamento del freno con resistore esterno
9.1.2
Valori nominali del freno con transistor incorporato
Freno
transistor
Inverter a 240 V
BFVCE0022A
BFVCE0032A
BFVCE0072A
375
4.0
BFVCE0152A
BFVCE0222A
Soglia VDC
Corrente di
picco Î
[V DC]
[A DC]
0.85
Max. corrente
permanente
[A DC]
0.85
2.0
5.8
Forza motrice
massima in VDC
[kW]
0.3
1.5
3.2
Potenza
continua in VDC
[kW]
0.3
0.75
2.2
[Ω]
470
90
47
Resistenza
minima
ammessa
40 °C < T < 60 °C: 2 %/K
1000 m s.l.m. < h < 4000 m s.l.m.: 5 %/1000 m
Max. 60 s di forza motrice massima, seguiti da min. 60 sec. di pausa
Diminuzione
potenza
Ciclo attivo
Freno
transistor
Soglia VDC
(vedere pagina
A – 3, C0174)
8.6
Inverter a 400 V
BFVCE0074A
BFVCE0154A
BFVCE0224A
BFVCE0404A
[V DC]
780
Corrente di picco Î [A DC]
Max. corrente
[A DC]
permanente
1.9
0.96
3.8
1.92
5.6
2.8
9.5
4.8
Forza motrice
massima in VDC
Potenza continua
in VDC
[kW]
1.5
3.0
4.4
7.4
[kW]
0.75
1.5
2.2
3.7
Resistenza
minima ammessa
[Ω]
455
230
155
82
Diminuzione
potenza
Ciclo attivo
9–4
40 °C < T < 60 °C: 2 %/K
1000 m s.l.m. < h < 4000 m s.l.m.: 5 %/1000 m
Max. 60 s di forza motrice massima, seguiti da min. 60 sec. di pausa
Matsushita Electric Works Italia
VF–CE Compatti
Operazione di frenatura
9.1
Funzionamento del freno con resistore esterno
Installazione
I resistori si possono surriscaldare o addirittura bruciare. Pertanto essi devono essere
montati in modo tale che le alte temperature non danneggino nulla.
Impostare per sicurezza l’interruzione di corrente in caso di surriscaldamento!
•
•
Utilizzare i contatti termici del resistore (per es. T1/T2) come
contatti di controllo per separare l’inverter dal circuito principale
Esempi di cablaggio: (vedere pagina 8 – 17)
NOTA
Per essere conformi agli standard (per es. VDE 0160, EN 50178)
utilizzare cavi schermati.
Diagramma di collegamento
Figura 22: Diagramma di collegamento per resistori freno
PES: Schermatura dei cavi tramite collegamento a PE
Matsushita Electric Works Italia
9–5
Operazione di frenatura
9.2
9.2
VF–CE Compatti
Resistenze di frenatura Matsushita: esempi applicativi
Resistenze di frenatura Matsushita: esempi applicativi
periodo di carico relativo[%]
Resistenza BFVC 9162U con capacità d’impulso
sovraccarico in tempi brevi [W]
Temperatura amb. 70°C
Le resistenze BFVC 9161U–BFVC 9165U sono applicabili in tutti i casi indicati a
sinistra della curva.
Il periodo di carico relativo è basato su di un ciclo di tempo di 120 secondi.
periodo di carico relativo [%]
Resistenze BFVC 9166U con capacità d’impulso
sovraccarico in tempi brevi [W]
Temperatura amb. 70°C
Le resistenze BFVC 9166U sono applicabili in tutti i casi indicati a sinistra della curva.
Il periodo di carico relativo è basato su di un ciclo di tempo di 120 secondi.
9–6
Matsushita Electric Works Italia
VF–CE Compatti
Operazione di frenatura
9.2
Resistenze di frenatura Matsushita: esempi applicativi
ESEMPIO
Nel selezionare una resistenza tenere presente il tipo di inverter
usato, l’applicazione e la capacità di trasformazione della potenza
del freno in calore. Di solito la potenza del freno dovrebbe
corrispondere alla potenza del motore dell’unità drive, mentre il
carico delle resistenze, essendo applicato ciclicamente, è
superiore al valore nominale. L’esatto valore, che dipende dalla
frequenza di frenata, può essere determinato dalla relazione fra il
periodo relativo di carico espresso in percentuale ed il ciclo di
tempo di 120 sec.
Calcolo
Esempio
• Tensione DC bus durante il funzionamento (U = 780 V in un sistema trifase 3 x 400V)
UDC + 780V
• Forza motrice massima rispetto alla potenza del drive (in kW)
P + 2, 2kW
• Periodo di carico in (%) rispetto al ciclo di tempo di 120 sec.
LP + 3%
• Resistenza R in Ohm
R+
U 2 DC
Pmax
R+
(780V) 2
2200W
R = 277 Ω
• Valore nominale del carico di potenza continua del resistore a seconda della tabella
“sovraccarico in tempi brevi / periodo relativo di carico” (in funzione dell’applicazione)
PD + 200W
• Tipo di resistore
BFVC9166U
NOTA
I valori nominali del resistore freno basati sui parametri
dell’applicazione devono sempre essere controllati.
Nelle due tabella precedenti è indicata la prestazione dei resistori BFVC 9162U e
BFVC 9166U durante il periodo di carico (con ciclo di tempo di 120 sec.) (vedere anche
pagina 9 – 6).
Matsushita Electric Works Italia
9–7
Operazione di frenatura
9.2
9–8
VF–CE Compatti
Resistenze di frenatura Matsushita: esempi applicativi
Matsushita Electric Works Italia
Capitolo 10
Accessori
10.1 Accessori / Interfacce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 – 3
10.2 Documenzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 – 4
Accessori
10 – 2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Accessori
10.1 Accessori / Interfacce
10.1 Accessori / Interfacce
Tipo
Descrizione
Codice prodotto
Modulo operatore
per attivare i parametri; con funzione copia
BFVC 904C
Modulo I/U standard
ingressi/uscite digitali ed analogici (già incorporati)
BFVC 90XY
Modulo di comunicazione
BFVC 9503
RS232C/RS485
RS232C e RS485 (multi–drop) per il collegamento
a computer o PLC
Modulo PROFIBUS AIF
Interfaccia PROFIBUS per collegamento su AIF
BFVC 9901
Modulo PROFIBUS FIF
Interfaccia PROFIBUS per collegamento su FIF
BFVC 9902
Impostazione controllo
remoto con modulo
operatore
per un funzionamento manuale flessibile con collegamento
tramite cavo
BFVC 9060
Cavo di 2m per controllo
remoto
BFVC 9062
Cavo di 5m per controllo
remoto
BFVC 9065
Resistori
per inverter monofase 0.25 kW–1.5 kW (100Ω/80W)
BFVC 9161U
per inverter monofase 2.2 kW (72Ω/120W)
BFVC 9162U
per inverter trifase 0.75 kW–1.5 kW (430Ω/80W)
BFVC 9164U
per inverter trifase 2.2 kW (330Ω/120W)
BFVC 9165U
per inverter trifase 4.0 kW (200Ω/220W)
BFVC 9166U
Matsushita Electric Works Italia
10 – 3
Accessori
10.2
VF–CE Compatti
Documentazione
10.2 Documentazione
Tedesco
Documentazione
Inglese
Italiano
Manuale Operativo
Inverter compatti VF–CE
ACGM0180DED ACGM0180END ACGM0180IT
Technical Description
RS232C/RS485 Communication
Module
ACGM0181DED ACGM0181END
Operating Instructions
PROFIBUS AIF Module DP Slave
(in preparazione)
ACGM0182DED ACGM0182END
Operating Instructions PROFIBUS FIF Module DP Slave
ACGM0183END
10 – 4
Matsushita Electric Works Italia
Capitolo 11
Esempi di applicazione
11.1 Controllo velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 – 3
11.1.1 Richieste sul sensore di velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 – 3
11.1.2 Configurazione specifica per applicazione . . . . . . . . . . . . . . . . . . . 11 – 4
11.1.3 Regolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 – 5
11.2 Gruppo drive – Funzionamento con più motori . . . . . . . . . . . . . . . . . . . . . . 11 – 7
11.3 Controllo di potenza – Limitazione coppia . . . . . . . . . . . . . . . . . . . . . . . . . . 11 – 8
Esempi di applicazione
11 – 2
VF–CE Compatti
Matsushita Electric Works Italia
VF–CE Compatti
Esempi di applicazione
11.1
Controllo velocità
11.1 Controllo velocità
ESEMPIO
Il controllo della velocità deve compensare la deviazione della
velocità effettiva rispetto al valore di riferimento.
Per il rilevamento della velocità del motore il sensore induttivo
(per es. ruota d’ingranaggio) scansiona una ventola metallica.
La scansione è possibile anche direttamente sul motore o nella
macchina.
RS232/
RS485
VF–CE
PROFIBUS
Standard I/U
GND1
PE
62
7
GND1
8
+5V
+20V
9
7 20
GND2
28 E1 E2
E3 E4 39 A1 59
M
3~
Figura 23: Controllo velocità con sensore trifase
Punto di riferi mento
Sensore trifase
11.1.1
Richieste sul sensore di velocità
• La frequenza massima dei sensori induttivi è compresa fra 1 e 6 kHz a seconda
del tipo.
• Selezionare il numero delle camme per giro al momento del rilevamento in modo
tale che la frequenza in uscita del sensore sia la più alta possibile.
• La frequenza in uscita (fatt) dovrebbe essere > 0.5 kHz per assicurare un
sufficiente controllo dinamico alla velocità nominale.
• Se il consumo di corrente del sensore non è superiore al valore permesso con
X3/20, il sensore trifase può essere direttamente collegato all’inverter.
continua
Matsushita Electric Works Italia
11 – 3
Esempi di applicazione
11.1
VF–CE Compatti
Controllo velocità
Rilevamento della frequenza in uscita
fist+ z @ n
60
z = Nr. di camme per giro
n = Velocità al momento del rilevamento in [min–1]
fatt = Frequenza in uscita del sensore in [Hz]
Impulso possibile per X3/E1
• Te = on (CHIUSO)
• Ta = off (APERTO)
Range ammesso:
• APERTO: 0 ... +3 V
• CHIUSO: +12 ... +30 V
Range del rapporto di scansione:
• da Te : Ta = 1 : 1 a Te : Ta = 1 : 5
UE1
15 V
0
0
Te
Ta
t
Suggerimento
T≥100µs
E’ possibile usare qualsiasi sensore
digitale di velocità che soddisfi le
richieste di livello e scansione.
11.1.2
Configurazione specifica per applicazione
Impostazioni di base (vedere pagina 3 – 4)
Codice
Impostazioni
Valore
C0011
Frequenza max. in
uscita
C0014↵ Modo controllo
C0021
Compensazione
scorrimento
C0036
C0070
Tensione DCB
Guadagno controllo
processo
C0071
Tempo azione
integrale controllo
processo
C0072
Componente
differenziale controllo
processo
C0074
Influenza controllo
processo
11 – 4
C0074 [%]
p
)@
@ n max
100
60
Controllo caratteristica V/f
p = Nr. di poli appaiati
nmax = velocità massima
[min–1]
Risposta dinamica modalità
“controllo vettore” troppo bassa
per questa applicazione
0%
In fase di controllo niente
compensazione scorrimento
50...100 %
1 ... 15
Adattamento all’applicazione
5 = tipico
50...500
ms
0
2...10 %
C0181* Controllo processo
Punto di riferimento 2
(PCTRL1–SET2)
C0238↵ Precontrollo
frequenza
Significato
(1 )
–2
IMPORTANTE
–1–
100 ms = tipico
Non attivo
•Adattamento all’applicazione
Esempio
•Impostare 2 tempi di
n0 * nN
1500
*
1400
SN+
+ 6.67 scorrimento motore (2 * S
SN+ n
nom)
1500
0
•Adattamento all’applicazione
•Selezione con tastiera o PC
•pag. 5 – 43: altre possibilità di
selezione valore di riferimento
Con precontrollo di frequenza
Matsushita Electric Works Italia
VF–CE Compatti
Esempi di applicazione
11.1
Codice
Impostazioni
Valore
C0425↵* Configurazione
ingresso frequenza
X3/E1 (DFIN1)
C0426* Ingresso frequenza
guadagno X3/E1
(DFIN1–Guadagno)
C0001
IMPORTANTE
Significato
Adattamento all’applicazione
–1–, –3–
1
3
C0005
11.1.3
Controllo velocità
–6–
Valore riferim. via modulo
RS232/485, tastiera
Riferim. via PROFIBUS–DP
Funzionamento controllato, riferimento
via X3/8,
Feedback frequenza digitale via E1
Regolazione
Vedere esempio in figura 23.
Ingresso frequenza X3/E1
La ruota d’ingranaggio sull’albero motore genera 6 impulsi a giro. Il motore funzione a
più di 1500 rpm. La frequenza massima con X3/E1 è:
1500 @ 6 + 150 Hz
60 s
Con X3/E1 si ottengono i seguenti risultati:
C0425 = –0–
Frequenza =100 Hz
Massima frequenza = 300 Hz
La frequenza in ingresso con X3/E1 è normalizzata al valore della frequenza
preselezionata (100 Hz), per es. internamente,100 Hz corrispondono all’impostazione
della frequenza in uscita con C0011.
Guadagno C0426
C0426 si deve adattare ad ogni cambiamento di C0011.
Se il numero delle camme da esaminare (ruota ad ingranaggi, ventola) è conosciuto:
Freno C0426 +
100 Hz (normalizz. freq. di C0425)
@ 50 Hz @ 100 %
50 Hz (freq. sensore a 50 Hz freq. in uscita) C0011
Se il numero delle camme da esaminare non è conosciuto, il guadagno va calcolato
come segue:
continua
Matsushita Electric Works Italia
11 – 5
Esempi di applicazione
11.1
11 – 6
VF–CE Compatti
Controllo velocità
1.
Impostare C0238 = 0 oppure 1.
2.
Accelerare il drive alla frequenza massima in uscita.
La frequenza massima è determinata dal precontrollo di
frequenza.
3.
Impostare il guadagno in C0426 in modo tale che il
valore effettivo (C0051) corrisponda a quello di
riferimento (C0050).
Matsushita Electric Works Italia
VF–CE Compatti
Esempi di applicazione
11.2
Gruppo drive – Funzionamento con più motori
11.2 Gruppo drive – Funzionamento con più motori
Più motori possono essere collegati in parallelo all’inverter. La somma delle singole
potenze dei motori non deve eccedere il valore nominale della potenza dell’inverter.
Installazione
•
•
•
•
Il cavo motore è collegato in parallelo, per es. in un box terminale.
Ogni motore deve possedere un termostato (con contatto
normalmente chiuso) collegato in serie a X2/T1 e X2/T2 con cavo
separato
Usare solo cavi schermati (vedere pagina 2 – 6). Collegarsi a PE
con una superficie la più larga possibile. (vedere pagina 2 – 13).
Lunghezza cavo:
l res + Somma di tutte le lunghezze dei cavi motore
ǸNr. cavi motore
Configurazione specifica per applicazione
•
•
•
Impostazioni base (vedere pagina 3 – 4)
Modo controllo C0014 = –2– oppure –4– (vedere pagina 5 – 3)
PTC ingresso C0119 = –1– (vedere pagina 5 – 55)
T1
VF–CE
T2
Strip terminale
Box terminale
Motore 1
Motore 2
ϑ>
ϑ>
Figura 24: Struttura del gruppo drive
Suggerimento
I cavi motore e i possibili elementi collegati possono
essere monitorati con il rilevamento dei danni alle
fasi del motore (vedere pagina A – 3, parametro
C0597)
Matsushita Electric Works Italia
11 – 7
Esempi di applicazione
11.3
VF–CE Compatti
Controllo potenza – Limitazione coppia
11.3 Controllo potenza – Limitazione coppia
Il controllo di potenza (limitazione coppia) genera, per esempio, un flusso costante di
massa quando un smezzo che cambia il suo peso specifico si sta muovendo – in
generale è aria in diverse temperature ambientali.
Il limite di coppia ed il valore di riferimento sono preselezionati per il tipo di inverter. In
presenza di fluttuazioni del carico specifico, il limite di coppia viene mantenuto grazie
all’adattamento automatico della velocità.
In caso di modo controllo “controllo coppia senza sensore” (C0014 = 5):
Con il controllo coppia senza sensore è preselezionata una coppia costante e un limite
di velocità ben definito non può essere superato .
Configurazione specifica per applicazione
•
•
•
Impostare C005 = 3.
Impostazioni base (vedere pagina 3 – 4)
Selezionare modo controllo: C0014
≠
5! (vedere pagina 5 – 3)
Suggerimento
• Impostare la frequenza max. in uscita C0011 come il valore max.
della velocità ammessa. Così non ci sono limiti di velocità ed il drive
continua a funzionare al limite di coppia selezionato.
• Limite di coppia può essere indicato in C0047.
• Selezioni possibili per i limiti di velocità e di coppia: (vedere pagina
5 – 26 segg.)
• Utilizzando l’inverter con I/U standard, il principale valore di
riferimento deve essere selezionato via PC, tastiera, frequenza
JOG o potenziometro, in quanto c’è solo un ingresso analogico.
• Tempo di accelerazione e momento di inerzia richiedono una
riserva di coppia.
• Gruppo drive non in funzione con il controllo di potenza
VF–CE
pesante
freddo
aria/scarico
caldo
M
f
ventola
leggero
massa
corrente
m= cost.
Figura 25: Esempio di una ventola per mostrare il principio di un controllo di potenza
11 – 8
Matsushita Electric Works Italia
Appendice A
Tabella codici
Tabella codici
A–2
VF-CE Compatti
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
A.1
Tabella codici
Tabella codici
• I codici sono elencati in ordine progressivo.
• Le indicazioni nella colonna “IMPORTANTE” forniscono
informazioni più dettagliate sui codici.
• Come leggere la tabella codici:
Colonna
Abbreviazione
Significato
Codice
Cxxxx
1
Codice Cxxxx
Sottocodice 1 di
Cxxxx
Sottocodice 2 di
Cxxxx
2
Il valore del parametro di un codice è lo stesso in tutte le
impostazioni parametri
Cxxxx↵
Le modifiche ai parametri saranno accettate premendo Le modifiche ai parametri saranno accettate premendo se l’inverter è bloccato
Nome
Default
IMPORTANTE
può essere diverso in ogni
impostazione parametri
• Il valore del parametro è accettato
immediatamente (ONLINE)
Cxxxx*
[Cxxxx]
Selezione
• Il valore del parametro di un codice
→
1
Nome del codice
Impostazione di default (impostazione valore alla consegna o
dopo la sovrascrittura di C0002 con l’impostazione di default
Ulteriori informazioni in “IMPORTANTE”
{1 %}
–
vedere pagina x
Matsushita Electric Works Italia
99 Min. valore
{passi/unità}
Valore max.
Indicazioni brevi e importanti
Indica dove trovare maggiori informazioni
A–3
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0001o Selezione
valore
impostato di
setpoint
(modo
operativo)
–0–
[C0002]* Trasferimen
to set
parametri
–0–
–0–
Selezione valore impostato di
setpoint tramite AIN1 (X3/8)
–1–
Selezione valore impostato di
setpoint tramite tastiera o tramite
parametro del modulo bus AIF
–2–
Selezione valore impostato di
setpoint AIN1 (X3/8)
–3–
• Selezione valore impostato di
setpoint via canale elaborazione
dati di un modulo bus AIF
• Modalità QSP se C0469 = 2
(vedere C0469)
–0–
Funzione eseguita
Impostazione parametri dell’ inverter
–1–
Impostazione di default PAR1
–2–
Impostazione di default PAR2
–3–
Impostazione di default PAR3
–4–
Impostazione di default PAR4
–10–
Tastiera PAR1 ... PAR4
–11–
–12–
–13–
–14–
–20–
Tastiera PAR1
Tastiera PAR2
Tastiera PAR3
Tastiera PAR4
PAR1 ... PAR4 Tastiera
Impostazione parametri di modulo in FIF
–31–
Impostazione di default FPAR1
–32–
Impostazione di default FPAR2
–33–
Impostazione di default FPAR3
–34–
Impostazione di default FPAR4
–40–
Tastiera FPAR1 ... FPAR4
–41–
–42–
–43–
–44–
–50–
Tastiera FPAR1
Tastiera FPAR2
Tastiera FPAR3
Tastiera FPAR4
FPAR1 ... FPAR4 tastiera
IMPORTANTE
• Valido per C0001 = 0 ... 3: E’
sempre possibile un controllo
via terminali o PC/tastiera allo
stesso tempo.
• Impostare C0001 = 3 per
selezionare il valore impostato
di setpoint via dati di processo
di un modulo di comunicazione
AIF! Diversamente i dati di
processo non saranno valutati
• I moduli AIF sono il modulo
PROFIBUS AIF e il modulo
RS232/485
Sovrascrivere il parametro
selezionato dell’inverter con
l’impostazione di default
Sovrascrivere con i dati tastiera
tutte le impostazioni dei parametri
Sovrascrivere un’impostazione
parametri con i dati tastiera
Sovrascrivere un’impostazione
parametri con i dati tastiera
Copiare tutte le impostazioni dei
parametri sulla tastiera
Sovrascrivere l’impostazione dei
parametri del modulo funzione
con l’impostazione di default
Sovrascrivere l’impostazione dei
parametri del modulo funzione
con i dati della tastiera
Sovrascrivere un’impostazione
parametri del modulo funzione
con i dati tastiera
Copiare tutte le impostazioni dei
parametri sulla tastiera
Impostazioni parametri inverter + modulo
funzione in FIF
–61–
–62–
–63–
–64–
–70–
–71–
–72–
–73–
–74–
–80–
A–4
Imp. di default PAR1 + FPAR1
Imp. di default PAR2 + FPAR2
Imp. di default PAR3 + FPAR3
Imp. di default PAR4 + FPAR4
Tastiera
PAR1 ... PAR4 + FPAR1 ... FPAR4
Tastiera PAR1 + FPAR1
Tastiera PAR2 + FPAR2
Tastiera PAR3 + FPAR3
Tastiera PAR4 + FPAR4
PAR1 ... PAR4 + FPAR1 ... FPAR4
Tastiera
Sovrascrivere le impostazioni dei
parametri con quelle di default
Sovrascrivere sulla tastiera tutte
le impostazioni dei parametri
Sovrascrivere singole
impostazioni di parametri sulla
tastiera
Copiare tutte le impostazioni dei
parametri sulla tastiera
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0003* Salvatag
o gio dei
parametri–
non volatile
–1–
C0004* Display a
o barre
56
C0005o Confi–
gurazione
segnali
analogici
–0–
–1–
Salvare sempre i parametri in EEPROM
Tabella codici
IMPORTANTE
• Attivo dopo ogni
collegamento al circuito
• Non sono ammesse
Tutti i codici possibili
(56 = carico inverter )
modifiche ai parametri
tramite modulo di
comunicazione.
• Il display a barre indica il
valore selezionato dopo il
collegamento al circuito
• Display indica C0517/1
–0–
Controllo funzionamento tramite X3/8 o
X3/1U, X3/1I
–1–
Controllo funzionamento tramite X3/8 con
sommatoria valore impostato tramite ingresso
di frequenza X3/E1
–2–
Controllo funzionamento tramite ingresso di
frequenza X3/E1 con sommatoria via X3/8
–3–
Controllo funzionamento tramite ingresso di
frequenza X3/E1 con limitazione di coppia
tramite X3/8 (controllo potenza)
–4–
Setpoint coppia via X3/8 con limite di velocità Attivo solo se C0014 = –5–
(preselezione coppia)
C0011
–5–
Setpoint coppia tramite X3/8 con limite di
velocità tramite ingresso di frequenza X3/E1
–6–
Controllo funzionamento; valore impostato
tramite X3/8 con feedback frequenza digitale
tramite X3/E1
–7–
Controllo funzionamento; valore impostato
tramite ingresso di frequenza X3/E1 con
feedback analogico tramite X3/8
–200– Tutti i segnali d’ingresso digitali ed analogici
derivano dal modulo di comunicazione
PROFIBUS–DP
continua
Matsushita Electric Works Italia
A–5
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
C0007o
o Configurazione
ingressi
digitali
Possibili impostazioni
Default Selezione
–0–
–0–
E4
CW/CCW
–1–
–2–
E3
DCB
E2
JOG2/3
E1
JOG1/3
CW/CCW
PAR
JOG2/3
JOG1/3
CW/CCW
QSP
JOG2/3
JOG1/3
–3–
CW/CCW
PAR
DCB
JOG1/3
–4–
CW/CCW
QSP
PAR
JOG1/3
–5–
CW/CCW
DCB
TRIP set
JOG1/3
–6–
CW/CCW
PAR
TRIP set
JOG1/3
–7–
CW/CCW
PAR
DCB
TRIP set •
–8–
CW/CCW
QSP
PAR
TRIP set
–9–
CW/CCW
QSP
TRIP set
JOG1/3
–10–
CW/CCW
TRIP set
UP
DOWN
–11–
CW/CCW
DCB
UP
DOWN
–12–
CW/CCW
PAR
UP
DOWN
–13–
CW/CCW
QSP
UP
DOWN
–14–
CCW/QSP CW/QSP
DCB
JOG1/3
–15–
CCW/QSP CW/QSP
PAR
JOG1/3
–16–
CCW/QSP CW/QSP
JOG2/3
JOG1/3
•
–17–
CCW/QSP CW/QSP
PAR
DCB
•
–18–
CCW/QSP CW/QSP
PAR
TRIP set
–19–
CCW/QSP CW/QSP
DCB
TRIP set
–20–
CCW/QSP CW/QSP
TRIP set
JOG1/3
–21–
CCW/QSP CW/QSP
UP
DOWN
–22–
CCW/QSP CW/QSP
UP
JOG1/3
UP
DOWN
–23–
A–6
IMPORTANTE
M/Re
CW/CCW
• CW = rotazione oraria
• CCW = rotaz. antioraria
• DCB = freno iniezione DC
• PAR = Sostituzione
•
•
•
•
•
(PAR1 ⇔ PAR2)
PAR1 = LOW; PAR2 =
CHIUSO
– Assegnare il terminale
corrispondente alla
funzione ”PAR” in PAR1
e PAR2.
JOG1/3, JOG2/3 =
Selezione valori di
riferimento fissi
JOG1: JOG1/3 =
CHIUSO, JOG2/3 =
APERTO
JOG2: JOG1/3 =
APERTO, JOG2/3 =
CHIUSO
JOG3: JOG1/3 =
CHIUSO, JOG2/3 =
CHIUSO
QSP = Arresto rapido
TRIP set = segnale di
errore dall’esterno
SU/GIU’ = Funzioni
potenziometro motore
M/Re = Sostituzione
manuale/remota
PCTRL1–I–OFF= Spegni–
mento del componente I
del controllore di processo
DFIN1–ON = Ingresso
digitale in frequenza
0...10 kHz
PCTRL1–OFF =
Disattivazione processo di
controllo
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Codice
No.
Nome
C0007 Configurazio
o ne ingressi
digitali
(cont.)
Possibili Impostazioni
Default Selezione
–0–
Tabella codici
IMPORTANTE
–24–
M/Re
PAR
UP
DOWN
–25–
M/Re
DCB
UP
DOWN
–26–
M/Re
JOG1/3
UP
DOWN
–27–
M/Re
TRIP set
UP
–28–
JOG2/3
JOG1/3
PCTRL1–I–
OFF
–29–
JOG2/3
DCB
PCTRL1–I–
OFF
–30–
JOG2/3
QSP
PCTRL1–I–
OFF
–31–
DCB
QSP
PCTRL1–I–
OFF
–32–
TRIP set
QSP
PCTRL1–I–
OFF
–33–
QSP
PAR
PCTRL1–I–
OFF
–34–
CW/QSP
CCW/QSP
PCTRL1–I–
OFF
–35–
JOG2/3
JOG1/3
PAR
–36–
DCB
QSP
PAR
–37–
JOG1/3
QSP
PAR
–38–
JOG1/3
PAR
TRIP set
–39–
JOG2/3
JOG1/3
TRIP set
–40–
JOG1/3
QSP
TRIP set
–41–
JOG1/3
DCB
TRIP set
–42–
QSP
DCB
TRIP set
–43–
CW/CCW
QSP
TRIP set
–44–
UP
DOWN
PAR
–45–
CW/CCW
QSP
PAR
–46–
M/Re
PAR
QSP
–47–
CW/QSP
CCW/QSP
M/Re
–48–
PCTRL1– OFF
DCB
PCTRL1–I–
OFF
–49–
PCTRL1– OFF
JOG1/3
QSP
–50–
PCTRL1– OFF
JOG1/3
PCTRL1–I–
OFF
–51–
DCB
PAR
PCTRL1–I–
OFF
DOWN
• CW = rotazione
oraria
• CCW = rotazione
antioraria
• DCB = freno
iniezione DC
DFIN1–ON • PAR = Sostituzione
(PAR1 ⇔ PAR2)
PAR1 = APERTO;
DFIN1–ON
PAR2 = CHIUSO
– Assegnare il
DFIN1–ON
terminale
corrispondente alla
DFIN1–ON
funzione ”PAR” in
PAR1 e PAR2.
DFIN1–ON
• JOG1/3, JOG2/3 =
Selezione valori di
DFIN1–ON
riferimento fissi
JOG1: JOG1/3 =
DFIN1–ON
HIGH, JOG2/3 =
APERTOW
DFIN1–ON
JOG2: JOG1/3 =
LOW, JOG2/3 =
DFIN1–ON
CHIUSO
DFIN1–ON
JOG3: JOG1/3 =
HIGH, JOG2/3 =
DFIN1–ON
CHIUSO
DFIN1–ON • QSP = Arresto
rapido
DFIN1–ON
• TRIP impostato =
errore esterno
DFIN1–ON
• UP/DOWN =
DFIN1–ON
Funzioni
potenziometro
DFIN1–ON
motore
DFIN1–ON
• M/Re = Passaggio
manuale/remoto
DFIN1–ON
• PCTRL1–I–OFF =
JOG1/3
Spegnimento
componente I del
JOG1/3
controllo di processo
DFIN1–ON • DFIN1–ON =
Ingresso digitale in
DFIN1–ON
frequenza 0 ... 10
kHz
DFIN1–ON
• PCTRL1–OFF =
Disattivazione
DFIN1–ON
processo di controllo
continua
Matsushita Electric Works Italia
A–7
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
C0008o Configurazio
ne uscita a
relè K1 (relè)
Possibili Impostazioni
Default Selezione
IMPORTANTE
–1–
–0–
–1–
–2–
–3–
–4–
–5–
–6–
–7–
–8–
–9–
Pronta (DCTRL1–RDY)
Messaggio errore TRIP (DCTRL1–TRIP)
Motore in funzione (MCTRL1–RUN)
Motore in funzione/rotazione oraria
(MCTRL1–RUN–CW)
Motore in funzione/rotazione antioraria
(MCTRL1–RUN–CCW)
Frequenza uscita = 0 (MCTRL1–NOUT=0)
Raggiungimento valore riferimento frequenza
(MCTRL–RFG1=NOUT)
Raggiungimento soglia Qmin
(PCTRL1–QMIN)
Raggiungimento limite Imax (MCTRL1–IMAX)
C0014 = –5–: valore rif. coppia raggiunto
Temperatura eccessiva (ϑmax – 5° C)
(DCTRL1–OH–WARN)
–10– TRIP o Qmin o blocco impulsi (IMP)
(DCTRL1–IMP)
–11– Allarme PTC (DCTRL1–PTC–WARN)
–12– Assorbimento motore < corrente soglia
(DCTRL1–IMOT<ILIM)
–13– Assorbimento motore < corrente soglia e
soglia Qmin raggiunta
(DCTRL1–(IMOT<ILIM)–QMIN)
–14– Assorbimento motore < corrente soglia e
generatore funzione rampa 1: ingresso =
uscita (DCTRL1–(IMOT<ILIM)–RFG1=0)
–15– Allarme errore di fase motore
(DCTRL1–LP1–WARN)
C0009*o Indirizzo
inverter
C0010 Frequenza
minima
uscita
C0011 Frequenza
massima
uscita
C0012 Valore rif.
princ. tempo
acceleraz.
C0013 Valore rif.
princ. tempo
deceleraz.
A–8
1
0.00
Assorbimento motore =
C0054
Corrrente soglia = C0156
–16– Raggiungimento frequenza minima uscita
(PCTRL1–NMIN)
1
{1}
99 Solo per moduli
comunicazione su AIF:
modulo RS232/485,
modulo PROFIBUS AIF
0.00
{0.02 Hz}
480.00 C0010 non valido se
C0034 = –2–
50.00
7.50
{0.02 Hz}
480.00
5.00
0.00
{0.02 s}
1300.00 Riferimento: cambio
frequenza 0 Hz ... C0011
5.00
0.00
{0.02 s}
1300.00 Riferimento: cambio
frequenza C0011 ... 0 Hz
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Codice
No.
Nome
Possibili impostazioni
Default Selezione
C0014o Modalità
controllo
–2–
–2–
–3–
–4–
–5–
C0015 Frequenza
nominale V/f
C0016 Spunto Vmin
C0017 Soglia Qmin
C0018o
o Frequenza
portante
50.00
→
0.00
–2–
{0.2 %}
C0021 Compensazione
di scorrimento
0.0
–50.0
C0022 Limite Imax
(modo motore)
150
C0023 Limite Imax in
modalità
generatore
40.0 → a seconda dell’inverter
{0.02 Hz}
480.00 Rif.: valore impostato
{0.02 Hz}
480.00 DCB=Freno iniezione DC
0.00 Hz = DCB automatico
non attivo
2 kHz
4 kHz
8 kHz
16 kHz
50.0
30
{1 %}
150
150
30
{1 %}
150 C0023 = 30 %: Funzione
non attiva se C0014 = –2–,
–3–:
0.0
–200.0
{0.1 %}
0
{0.02 %}
100.0
C0034*o
o Range ingresso
valore di
riferimento
–0–
JOG1
JOG2
JOG3
Inibizione
inverter
960.00
{0.1 %}
C0027* Ingresso
analogico di
guadagno 1
(AIN1–GAIN)
C0037
C0038
C0039
C0040*o
o
Caratteristica lineare con
spunto Vmin costante
Controllo caratteristica V/f V ~ f2
Caratteristica quadratica
con spunto Vmin costante
Per la selezione iniziale
Controllo vettoriale
con C0148, identificare i
Controllo di coppia con limite velocità,
parametri motore.
valore riferimento coppia e valore per
limite velocità devono essere selezionati Diversamente non sarà
possibile l’attivazione.
in C0005
0.00
0.10
C0036 Tensione DCB
Controllo caratteristica V/f V ~ f
{0.02 Hz}
C0019 DCB automatico
C0026* Ingresso offset
analogico 1
(AIN1–OFFSET)
IMPORTANTE
7.50
0.00
–0–
–1–
–2–
–3–
0.00
Tabella codici
→
20.00
30.00
40.00
200.0 • Impostazione per X3/8
• Il limite superiore del
range del valore di
riferimento in C0034
corrisponde a 100%
–1500.0
{0.1 %}
1500.0 • Impostazione per X3/8
• 100.0 % = Guadagno 1
• Selezione inversa valore
riferimento tramite
guadagno negativo e
offset negativo
• Osservare la posizione
–0– 0 ... 5 V / 0 ... 10 V / 0 ... 20 mA
dell’interruttore del
–1– 4 ... 20 mA
modulo funzione!
–2– –10 V ... +10 V
• C0034 = –2–:
–3– 4 ... 20 mA Controllo circuito aperto
– C0010 non
(TRIP Sd5, if I < 4 mA)
funzionante
–480.00
{0.02 Hz}
–480.00
{0.02 Hz}
–480.00
{0.02 Hz}
–0– Inverter inibito (CINH)
–1– Inverter abilitato (CINH)
150 % → in funzione dell’ inverter
RiferimentoMr, Ir
480.00 JOG = Frequenza JOG
480.00
480.00
continua
Matsushita Electric Works Italia
A–9
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
Possibili Impostazioni
Default Selezione
C0043*o Cancellazione
TRIP
–1–
IMPORTANTE
Errore attivo
Cancellazione errore attivo con
C0043 = 0
C0044* Valore impostato
di setpoint 2
(NSET1–N2)
–480.00
{0.02
Hz}
480.00
C0046* Valore impostato
di setoint 1
(NSET1–N1)
–480.00
{0.02
Hz}
480.00
C0047* Valore di coppia
impostato o valore
di coppia limite
(MCTRL1–MSET)
0
{%}
C0049* Valore impostato
aggiuntivo
(PCTRL1–NADD)
C0050* Frequenza uscita
(MCTRL1–NOUT)
–480.00
{Hz}
–480.00
{Hz}
480.00 Solo visualizzazione: Frequenza
uscita senza compensazione di
scorrimento
C0051* Valore effettivo
controllore
processo
(PCTRL1–ACT)
–480.00
{Hz}
C0052* Tensione motore
(MCTRL1–VOLT)
0
{V}
480.00 Funzionamento con controllore
di processo (C0238 = 0, 1):
• Solo visualizzazione:
Funzionamento senza
controllore processo (C0238= 2):
• Solo visualizzazione:
frequenza uscita senza
compensazione di
scorrimento
(MCTRL1–NOUT+SLIP)
1000 Solo visualizzazione
C0053* Tensione bus DC
(MCTRL1–
DCVOLT)
0
{V}
1000 Solo visualizzazione
C0054* Assorb. motore
(MCTRL1–IMOT)
0
{A}
400 Solo visualizzazione
C0056* Carico inverter
(MCTRL1–MOUT)
–255
{%}
255 Solo visualizzazione
C0061* Temperatura
minima consentita
0
{°C}
255 Solo visualizzazione
C0070 Guadagno
controllore di
processo
1.00
0.00
C0071 Tempo totale
azione del
controllore di
processo
C0072 Componente
differenziale del
controllore di
processo
C0074 Influenza del
guadagno
100
10
{1}
9999 9999 = componente I non attivo
0.0
0.0
{0.1}
5.0 0.0 = componente D non attivo
0.0
0.0
{0.1%}
A – 10
{0.01}
400 Modalità “controllo di coppia”
(C0014 = 5):
• Visualizzazione valore di
coppia impostato
In modalità “controllo
caratteristica V/f” o “Controllo
vettoriale”
(C0014 = 2, 3, 4):
• Visualizzazione valore di
coppia limite
480.00
300.00 0.00 = componente P non attivo
100.0
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Codice
No.
Nome
Possibili Impostazioni
Default Selezione
C0077* Guadagno
controllore Imax
0.25
C0078* Tempo totale
azione
controllore Imax
65
C0079 Attenuazione
oscillazioni
→
{0.01}
16.00 0.00 = componente P non attivo
12
{1 ms}
9990 9990 = componente I non attivo
0
{1}
0.000
0.000
C0087 Velocità
nominale
motore
1390
C0092 Induttanza
statore motore
80 → in funzione dell’inverter
{0.001 W}
64.000
300
{1 rpm}
16000
0.0
{0.1 A}
480.0 → in funzione dell’inverter
0.0 ... 2.0 x corrente nominale
uscita motore
10
{1 Hz}
960
→
50
{1 V}
500 → in funzione dell’inverter
→
0.40
{0.1}
1.0 → in funzione dell’inverter
0.0
{0.1 mH}
→
C0089 Frequenza
nominale
motore
C0090 Tensione
nominale
motore
C0091 Cos ϕ motore
IMPORTANTE
0.00
C0084 Resistenza
statore motore
C0088 Corrente
nominale
motore
Tabella codici
50
0.0
C0093* Tipo
xxxy
C0094* Password
utente
0000
C0099* Versione
software
x.y
{1}
C0105 Tempo
decelerazione
QSP
5.00
0.00
{0.02 s}
C0106 Tempo frenata
DCB
automatico
0.50
0.00
{0.01 s}
C0108* Uscita
analogica
guadagno
X3/62
(AOUT1–GAIN)
128
0
C0109* Uscita
analogica offset
X3/62 (AOUT1–
OFFSET)
0.00
–10.00
{1}
{0.01 V}
2000.0
Solo visualizzazione
• xxx = valori di potenza
sull’etichetta (es. 551= 550
W)
• y = Classe tensione (2 = 240
V, 4 = 400 V)
9999 Scrive la protezione per tutti i
codici – eccetto i dati registrati
nel menu utente (C0517)
0000 = no protezione password
Solo visualizzazione
x = Versione, y = Indice
1300.00 QSP = Arresto rapido
999.00 Determina la durata della
funzione di DCB automatico
(vedere C0019)
255
10.00
continua
Matsushita Electric Works Italia
A – 11
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
C0111o Configurazione
uscita
analogica
X3/62
(AOUT1–IN)
Possibili Impostazioni
Default Selezione
Uscita segnale analogico verso il terminale
–0–
–0–
–1–
Frequenza uscita (MCTRL1–NOUT+SLIP)
Carico inverter (MCTRL1–MACT)
–2–
Corrente assorbita motore (MCTRL1–IMOT)
–3–
Tensione DC bus (MCTRL1–DCVOLT)
–4–
Potenza motore
–5–
Tensione motore (MCTRL1–VOLT)
–6–
1/frequenza uscita (1/C0050)
(MCTRL1–1/NOUT)
Frequenza uscita entro i limiti impostati
(NSET1–C0010...C0011)
Funzionamento con controllo di processo
(C0238 = 0, 1):
Valore effettivo controllo di processo
(PCTRL1–ACT)
Funzionamento senza controllo di processo
(C0238 = 2):
Frequenza uscita senza scorrimento
(MCTRL1–NOUT)
–7–
–8–
C0117o Configurazione
uscita digitale
A1 (DIGOUT1)
–0–
C0119o Configurazione
ingresso
PTC/controllo
errore di terra
–0–
C0120 disattivazione
I2t
C0125*o
o baud rate
A – 12
IMPORTANTE
0
–0–
–0– cfr. C0008
...
–16–
–0– Ingresso PTC non
attivo
–1– Ingresso PTC attivo,
TRIP set
–2– Ingresso PTC attivo,
Warning set
–3– Ingresso PTC non
attivo
–4– Ingresso PTC attivo,
TRIP set
–5– Ingresso PTC attivo,
Warning set
0
{1 %}
–0–
–1–
–2–
–3–
–4–
9600 baud
4800 baud
2400 baud
1200 baud
19200 baud
Controllo errore di
terra attivo
6 V ≡ C0011
3 V ≡ Coppia nominale
motore per controllo
vettoriale (C0014 = 4),
altrimenti corrente
nominale effettiva
(corrente effettiva /
C0091)
3 V ≡ Corrente nominale
inverter
6 V ≡ 1000 VDC a 400 V
rete
6 V ≡ 380 VDC a 240 V
rete
3 V ≡ Potenza nominale
motore
4.8 V ≡ Tensione
nominale motore
2 V ≡ C0050 = 0.4 ×
C0011
0 V ≡ f = fmin (C0010)
6 V ≡ f = fmax (C0011)
6 V ≡ C0011
Disattiva il controllo
errore di terra se viene
attivato accidentalmente
(secondo il tipo di
circuito)
Rilevamento errore
di terra
200 C0120 = 0: disattivazione
I2t non attiva
Solo per RS232C
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Codice
No.
Nome
C0126*o Reazione a
errori di
comunicazione
Possibili Impostazioni
Default Selezione
–2–
–0–
–1–
–2–
–3–
C0127o Selezione
valore di
riferimento
–0–
–0–
IMPORTANTE
No TRIP se la comunicazione viene interrotta
nel canale di processo AIF
No TRIP se viene arrestata la comunicazione
tra inverter e modulo funzione in FIF.
TRIP (CEO) se la comunicazione viene
interrotta nel canale di processo AIF
No TRIP se viene arrestata la comunicazione
tra inverter e modulo funzione in FIF.
No TRIP se la comunicazione viene interrotta
nel canale di processo AIF
TRIP (CE5) se viene arrestata la
comunicazione tra inverter e modulo funzione
TRIP (CEO) se la comunicazione viene
interrotta nel canale di processo AIF
TRIP (CE5) se viene arrestata la
comunicazione tra inverter e modulo funzione
Selezione valore di riferimento assoluto in Hz
tramite C0046 o canale di processo
Selezione valore impostato normalizzato
tramite C0141 (0... 100 %) o canale di
processo (±16384 = C0011)
–480.00
{0.02 Hz}
480.00
C0140* Valore
riferimento
frequenza
aggiunto
(NSET1–
NADD)
–480.00
{0.02 Hz}
C0141* Valore
riferimento
standardizzato
C0142o Condizione di
avvio
–100.00
{0.01 %}
–1–
–0–
480.00 • Selezione tramite
funzione del
tastierino o canale
parametri
• Salvataggio non
volatile del valore. Il
valore è aggiunto al
valore di riferimento
principale.
100.00 Valido solo se C0127 = 1
Riferimento: C0011
–1–
–0–
–1–
–0–
–0–
Inibizione avvio automatico
Ripresa al volo non attiva
Avvio automatico se X3/28 = CHIUSO
Ripresa al volo non attiva
Inibizione avvio automatico
Circuito ripresa al volo attivo
Avvio automatico se X3/28 = CHIUSO
Circuito ripresa al volo attivo
No riduzione frequenza portante
Riduzione automatica frequenza portante a
ϑmax – 5° C
Valore riferimento totale (PCTRL1–SET3)
–1–
C0181 (PCTRL1–SET2)
–2–
C0138 (PCTRL1–SET1)
–1–
–2–
–3–
C0145*o Valore
riferimento
principale
controllore di
processo
Solo per funzionamento
bus
Modulo funzione su FIF:
PROFIBUS–DP
–1–
C0138* Valore
riferimento 1
controllo di
processo
(PCTRL1–
SET1)
C0144o
o Riduzione
frequenza
portante
Tabella codici
Valore riferimento
principale + aggiuntivo
continua
Matsushita Electric Works Italia
A – 13
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
[C0148]* Identificazione
parametri
motore
Possibili Impostazioni
Default Selezione
–0–
–0–
IMPORTANTE
• C0087, C0088,
Identificazione non attiva
•
•
–1–
Avvio identificazione
•
•
C0156*
C0161*
C0162*
C0163*
Soglia corrente
Errore attuale
Ultimo errore
Penultimo
errore
C0164* Terz’ultimo
errore
C0168* Errore attuale
C0170o Cancellazione
configurazione
TRIP
C0171 Ritardo
cancellazione
automatica
TRIP
A – 14
0
–0–
0.00
0
–0–
{1 %}
C0089, C0090, C0091
devono essere inseriti
correttamente
Viene misurata la
resistenza dello
statore del motore
(C0084)
Vengono calcolate
frequenza nominale
V/f (C0015),
scorrimento (C0021) e
induttività statore
motore
L’identificazione
richiede ca. 30 s
Terminata
l’identificazione
– lampeggia il LED
verde sull’inverter
– è attivo il segmento
sulla tastiera o
in NAIS Motion
Control
150
Cancellazione TRIP tramite interruzione rete,
, LOW–signal a X3/28, tramite modulo
funzione o modulo comunicazione
–1– come –0– e cancellazione automatica TRIP
aggiuntiva
–2– Cancellazione TRIP tramite interruzione rete,
tramite modulo funzione o modulo
comunicazione
–3– Cancellazione TRIP tramite interruzione rete
0.00
{0.01 s}
60.00
Visualizza il contenuto
dello storico errori
• Tastierino: tre cifre,
rilevamento errori
alfanumerici
• Tastierino 9371BB:
codice errore di
sistema
• Cancellazione TRIP
tramite modulo
funzione o modulo
comunicazione con
C0043 o C0135 bit 11.
• Cancellazione
automatica TRIP dopo
aver impostato il
tempo in C0171.
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Codice
No.
Nome
[C0174]* Soglia transistor
freno
Possibili Impostazioni
Default Selezione
100
78
{1 %}
IMPORTANTE
110 • Attivo solo con inverter
VF–CE 400 V
• DC 780 V = 100 %
• Non passare a tensione di
rete 3 AC 550 V
• Se compare il messaggio
“Sovratensione (OU)”anche
con un resistore freno per
tensioni di rete < 3 AC
550V:
C0174 [%] w
C0178* Tempo operativo
C0179* Tempo
attivazione rete
C0181* Valore di
riferimento
controllore
processo 2
(PCTRL1–SET2)
C0183* Diagnosi
C0184* Soglia frequenza
PCTRL1–I–OFF
Tempo totale CINH = HIGH {h}
Tempo totale attivazione rete {h}
0.00
–480.00
0
102
104
0.0
142
151
161
250
0.0
C0202* Identificazione
software
1
...
4
C0238o Controllo
preliminare
frequenza
{0.02 Hz}
Tabella codici
110 @ U Rete @ Ǹ2
780
Solo visualizzazione
Solo visualizzazione
480.00
Solo visualizzazione
Nessun errore
TRIP attivo
Messaggio “Sovratensione (OU)” o
“Sottotensione (LU)” attivo
Inibizione impulsi
Arresto rapido attivo
Freno iniezione Dc attivo
Warning attivo
{0.1 Hz}
25.0 • Per un’uscita di frequenza
< C0184, il componente I
del controllore di processo
sarà disattivo
• 0.0 Hz = Funzione non
attiva
Solo visualizzazione
Codice di servizio
Matsushita
–2–
–0–
–1–
–2–
No controllo preliminare (solo
controllo di processo)
Controllo preliminare (valore
impostato totale + controllo di
processo)
No controllo preliminare (solo valore
impostato totale)
Piena influenza del controllo di
processo
Piena influenza del controllo di
processo
Il controllo di processo non ha
influenza
Valore impostato totale
(PCTRL1–SET3) = valore
impostato principale +
aggiuntivo
continua
Matsushita Electric Works Italia
A – 15
Tabella codici
A.1
VF-CE Compatti
Tabella codici
Codice
No.
Nome
C0265*o Configurazione
potenziometro
motore
Possibili Impostazioni
Defa Selezione
ult
–3–
C0304 Codice servizio
...
C0309
C0372* Identificazione
modulo funzione
–1–
Valore avvio = C0010
–2–
Valore avvio = 0
–3–
Valore avvio = non alimentato
QSP, se UP/DOWN = APERTO
–4–
Valore avvio = C0010
QSP, if UP/DOWN = APERTO
–5–
Valore avvio = 0
QSP, if UP/DOWN = APERTO
–0–
–1–
–6–
–10–
Bit
1–16
Nessun modulo funzione
Standard I/O
Modulo PROFIBUS FIF
Nessuna identificazione valida
Parola di controllo inverter (C0135)
Bit
Valore di riferimento 1 (NSET1–N1)
17–32 (mappatura di C0046)
C0396*o LONGWORD
dati uscita
processo
Bit
1–16
–2–
C0426* Guadagno
ingresso di
frequenza X3/E1
(DFIN1–GAIN)
100
C0427* Offset ingresso
di frequenza
X3/E1 (DFIN1–
OFFSET)
0.0
A – 16
Valore avvio = non alimentato
• Valore avvio: frequenza
di uscita raggiunta con
Tinom (C0012) quando il
circuito di rete è attivato
e il potenziometro del
motore è acceso:
– “Power off” = valore
attuale con rete
spenta
– “C0010”: min.
frequenza uscita da
C0010
– “0” = frequenza uscita
0 Hz
• C0265 = –3–, –4–, –5–:
– QSP riduce il
potenziometro del
motore lungo la rampa
QSP (C0105)
Modifiche solo da parte
del servizio Matsushita
C0395*o LONGWORD
dati ingresso
processo
C0425o* Configurazione
ingresso
frequenza
singolo canale
X3/E1 (DFIN1)
–0–
IMPORTANTE
Solo visualizzazione
Solo per funzioni bus
Invio parola di controllo e
valore di riferimento
principale in un messaggio
all’inverter
Solo per funzioni bus
Lettura parola di stato e
frequenza di uscita in un
messaggio dall’inverter
Parola di stato inverter 1
(mappatura di C0150)
Bit
Frequenza uscita (MCTRL1–NOUT)
17–32 (mappatura di C0050)
Fre–
Risolu– Velocità Frequenz • Valido solo se E1 è
configurato come
quenza zione
scansion
a
ingresso in frequenza in
e
max
C0007 e in C0005
–0–
100 Hz
1/200
1s
300 Hz • “Frequenza” è riferita
alla normalizzazione
–1–
1 kHz
1/200
100 ms
3 kHz
interna (es. C0011 etc.)
–2–
10 kHz
1/200
10 ms
10 kHz • “Max. frequenza” è la
frequenza max. gestibile
da E1 in funzione di
–3–
10 kHz 1/1000
50 ms
10 kHz
C0425. Se il valore di
–4–
10 kHz 1/10000 500 ms
10 kHz
un’impostazione viene
superato, in lC0426 lo si
–1500.0
{0.1 %}
1500.0
può correggere
proporzionalmente:
– Esempio: C0425 =
–0–, E1: 300 Hz
– C0426 = 33.3 %
–100.0
{0.1 %}
100.0
permette la
valutazione corretta
con C0425 = –0–
• Riferimento: C0011
Matsushita Electric Works Italia
VF-CE Compatti
Tabella codici
A.1
Code
No.
Nome
[C0469]* Funzione del
tasto sulla
tastiera
Possibili Impostazioni
Default Selezione
–1–
–0–
–1–
–2–
IMPORTANTE
Determina la funzione
che si atttiva premendo
.
Non attivo
CINH (inibizione inverter)
QSP (vedere C0001 selezionare 3)
• Quando è attiva la
C0517*o Menu utente
1 Memoria 1
50
2 Memoria 2
34
3 Memoria 3
7
4 Memoria 4
10
5 Memoria 5
11
6 Memoria 6
12
7 Memoria 7
13
8 Memoria 8
15
9 Memoria 9
16
10 Memoria 10
2
C00
50
C00
34
C00
07
C00
10
C00
11
C00
12
C00
13
C00
15
C00
16
C00
02
funzione protezione
password, si può
accedere solo ai
codici registrati in
C0517.
• Inserimento numeri
di codici richiesti nei
sottocodici.
• Se vengono inseriti
codici che non sono
disponibili, C0050
verrà copiato nella
memoria.
Frequenza uscita (MCTRL1–NOUT)
Range valore di riferimento ingresso
Configurazione ingressi digitali
Frequenza minima uscita
Frequenza massima uscita
Valore di riferimento principale tempo di
accelerazione
Valore di riferimento principale tempo di
decelerazione
Frequenza nominale V/f
Spunto Vmin
Trasferimento set parametri
C0518 Codici di
servizio
C0519
C0597*o
o Configurazione
rilevamento
errori di fase del
motore
C0599*o Limite coppia
motore –
rilevamento
errore di fase
C0625* Salto di
frequenza 1
C0626* Salto di
frequenza 2
C0627* Salto di
frequenza 3
C0628* Ampiezza salto
di frequenza
Tabella codici
Modifiche solo da
parte del servizio
Matsushita!
–0–
5
–0–
Non attivo
Messaggi di errore:
–1–
Messaggio errore di TRIP
Tastiera: LP1, Bus: 32
–2–
Warning
1
Tastiera: LP1, Bus: 182
{1 %}
50 • Soglia per C0597
• Rif.: corrente
nominale inverter
480.00
0.00
{0.02 Hz}
480.00
480.00
0.00
{0.02 Hz}
480.00
480.00
0.00
{0.02 Hz}
480.00
0.00
0.00
{0.01 %}
100.00 Riferito a C0625,
C0626, C0627
Matsushita Electric Works Italia
A – 17
Tabella codici
A – 18
VF-CE Compatti
Matsushita Electric Works Italia
Indice analitico
A
Accelerazione, 5 – 20
Accelerazione/decelerazione regolari, 5 – 20
Accessori
documentazione, 10 – 4
gamma, 10 – 3
resistenza frenatura esterna, 9 – 3
AIF, Prefazione – 1
funzionamento parallelo con FIF, 7 – 4
Alimentazione a 240 V, collegamento
dell’inverter , 2 – 11
Alimentazione a 400 V, collegamento
dell’inverter , 2 – 12
Alimentazione centrale. Vedi Rete di più
drive
Alimentazione decentralizzata. Vedi Rete di
più drive
Arresto, 5 – 20
Arresto rapido (QSP), 5 – 22
Attivare una funzione protetta, 4 – 10
Automazione, funzionamento parallelo delle
interfacce AIF e FIF, 7 – 4
Avvertenze di sicurezza, e
conformità alla Direttive Bassa Tensione
73/23/EC, c
Avviamento, 3 – 1
con modulo di comunicazione, 3 – 9
con modulo I/U standard, 3 – 7
principali impostazioni di default, 3 – 6
B
Banca codici , 4 – 16
Blocco dell’inverter (CINH), 5 – 16
Bus DC, sezione cavi, 8 – 6
Matsushita Electric Works Italia
C
Campo della frequenza
massima, 5 – 17
minima, 5 – 17
Campo di temperatura ammesso, 1 – 3
Campo inserimento valore riferimento,
modulo I/U standard , 5 – 27
Campo settaggio coppia, 1 – 4
Caratteristica V/f, 5 – 6
frequenze elevate del motore, 5 – 7
Cavi motore, lunghezza massima, 2 – 6
Cavi, sezione
bus DC, 8 – 6
rete di più drive, 8 – 7
singoli drive, 1 – 10
Cavi, specifiche, 2 – 6
Circuito con ripresa al volo, 5 – 14
Circuito principale
caratteristiche, 2 – 5
collegamento inverter a 240 V, 2 – 11
collegamento inverter a 400 V, 2 – 12
compensazione tensione, 5 – 7
isolamento, 2 – 4
tempo di attivazione, 5 – 58
tipo, 2 – 5
Classe di inquinamento, 1 – 3
Codici, 4 – 3
Collegamenti di controllo, 2 – 14
descrizione terminali I/U standard, 2 – 14
Collegamento alimentazione, 2 – 11
a reti a 400 V, 2 – 12
a reti a 240 V, 2 – 11
motore, 2 – 12
resistenza di frenatura esterna, 2 – 12
I–1
Indice analitico
Collegamento elettrico, 2 – 10
alimentazione, 2 – 11
avvertenze importanti, 2 – 3
conforme ai requisiti EMC, 2 – 13
connettori a innesto, 2 – 10
di controllo, 2 – 14
modulo comunicazione RS232C/RS485,
4 – 13
uscita a relè, 2 – 16
Compensazione di scorrimento, 5 – 9
Condizioni di avvio, 5 – 14
Configurazione
arrresto rapido (QSP), 5 – 22
attenuazione dell’oscillazione, 5 – 11
blocco dell’inverter (CINH), 5 – 16
cambio direzione di rotazione, 5 – 22
campo frequenza massima, 5 – 17
campo frequenza minima, 5 – 17
compensazione di scorrimento, 5 – 9
condizioni di avvio/circuito con ripresa al
volo, 5 – 14
controllo limitazione corrente, 5 – 46
controllo termico motore, 5 – 53
freno a iniezione DC (DCB), 5 – 24
frequenza portante inverter, 5 – 10
frequenza nominale V/f, 5 – 6
funzionamento manuale/remoto, 5 – 36
funzioni di controllo, 5 – 53
funzioni di visualizzazione, 5 – 57
impostazione valori riferimento, 5 – 26
libreria funzioni, 5 – 1
modalità di controllo, 5 – 3
parametri, 4 – 3
rilevamento dati motore, 5 – 38
segnali di ingresso digitali, 5 – 50
segnali di uscita analogici, 5 – 47
segnali di uscita digitali, 5 – 52
selezione ingresso offset analogico 1,
5 – 27
selezione valori di riferimento, 5 – 26
sostituzione set di parametri, 5 – 61
spunto Vmin, 5 – 7
tabella codici, A – 3
tempi accelerazione/decelerazione, 5 –20
I–2
VF–CE Compatti
TRIP set, 5 – 56
uscita relè, 5 – 52
uscite analogiche, 5 – 47
uscite digitali, 5 – 52
valori limite della corrente, 5 – 18
valori limite della velocità, 5 – 17
Conformità, 1 – 3
Controllo comunicazione, modulo
RS232C/RS485, 4 – 16
Controllo caratteristica V/f, spunto Vmin, 5 – 4
Controllo di coppia, anello aperto con
limitazione della velocità, 5 – 4
Controllo di processo, disattivazione, 5 – 45
Controllo I2 x t, 5 – 53
Controllo Imax
guadagno, 5 – 46
tempo azione integrale, 5 – 46
Controllo limitazione corrente, 5 – 46
Controllo motore, 5 – 53
Controllo motore PTC, 5 – 55
Controllo PID, 5 – 41
componente azione integrale,
disattivazione, 5 – 45
impostazione, 5 – 41
inserimento valore di riferimento, 5 – 43
precontrollo valore di riferimento, 5 – 43
selezione valori effettivi, 5 – 45
Controllo potenza, 11 – 8
Controllo termico, motore
con PTC, 5 – 55
senza sensori, 5 – 53
Controllo velocità, 11 – 3
Controllo vettoriale, 5 – 4
Coppia
campo impostazione, 1 – 4
controllo anello aperto con limitazione
velocità, 5 – 4
limitazione, 11 – 8
velocità, 1 – 4
Corrente di uscita, riduzione, 5 – 12
Correnti di fuga residue, e
Matsushita Electric Works Italia
VF–CE Compatti
D
Dati generali, 1 – 3
Dati tecnici, 1 – 1
dati generali / condizioni di utilizzo, 1 – 3
modulo RS232C / RS485, 4 – 11
tastiera, 4 – 4
valori nominali
funzionamento con 120 %
sovraccarico, 1 – 7
funzionamento con 150 %
sovraccarico, 1 – 5
Decelerazione, 5 – 20
Definizioni, terminologia, Prefazione – 1
Descrizione terminali, modulo I/U standard ,
2 – 14
Diagnosi, 5 – 58
Direzione di rotazione (CW/CCW)
con controlli di sicurezza, 5 – 22
senza controlli di sicurezza, 5 – 22
Display a barre, 4 – 6
Display LED , 6 – 3
Indice analitico
F
FIF, Prefazione – 1
funzionamento parallelo con AIF, 7 – 4
Filtri e ferriti del circuito principale, per
collegamenti bus DC, 8 – 10
Formato caratteri, 4 – 11
Frenata, 5 – 20
Freno a iniezione DC, 5 – 24
Freno con transistor, 9 – 4
Freno, funzionamento
con resistore esterno, 9 – 3
in reti di drive, 8 – 18
Frequenza nominale V/f, 5 – 6
Frequenza portante, diminuzione, 5 – 10
Frequenze di JOG, 5 – 34
Funzionamento
ottimizzazione, 5 – 9
riduzione della rumorosità, 5 – 10
Funzionamento errato del drive, 6 – 4
Funzionamento in DC, 1 – 3
Dispositivi di compensazione, interazioni con,
2–5
Funzionamento manuale / remoto, 5 – 36
Documentazione, 10 – 4
Funzionamento parallelo delle interfacce AIF
e FIF, 7 – 4
Drive con più motori, 11 – 7
Funzioni, tastiera, 4 – 6
Funzioni di controllo, 5 – 53
E
Errori
analisi, 6 – 5
eliminazione, 6 – 3
messaggi, 6 – 6
esterni, 5 – 56
reset, 6 – 8
storico, 6 – 5
Esempi applicativi
controllo potenza, 11 – 8
controllo velocità, 11 – 3
gruppo drive, 11 – 7
Matsushita Electric Works Italia
Funzioni di visualizzazione, 5 – 57
Fusibili
con sistemi omologati UL, 1 – 10
rete di più drive, 8 – 7
singoli drive, 1 – 10
Fusibili bus DC, 8 – 6
G
Garanzia, b
Grado di protezione, 1 – 3
I–3
Indice analitico
VF–CE Compatti
Gruppo drive, 11 – 7
Installazione conforme requisiti EMC, 2 – 13
Guadagno
controllo Imax, 5 – 46
ingresso analogico 1, 5 – 27
uscita analogica 1, 5 – 47
Interazioni dispositivi compensazione, 2 – 5
I
Inverter
frequenza portante, 5 – 10
marchio, a
protezione, f
riduzione della rumorosità, 5 – 10
Isolamento circuito principale, 2 – 4
Imballaggio, 1 – 3
Isolamento dei circuiti di controllo, 1 – 3
Immunità verso il rumore, 1 – 3
Impostazione parametri, 4 – 1
codici, 4 – 3
con moduli comunicazione, 4 – 4
con modulo comunicazione
RS232C/RS485, 4 – 8, 4 – 11
con modulo PROFIBUS, 4 – 19
indicazioni generali, 4 – 1
sottocodici , 4 – 3
tramite tastiera, 4 – 4
Impostazione valori riferimento, 5 – 26
bipolare, 5 – 29
campo, 5 – 27
controllo PID, 5 – 43
tramite frequenze di JOG, 5 – 34
tramite potenziometro motore, 5 – 32
tramite sistema di bus, 5 – 36
tramite tastiera, 5 – 35
unipolare, 5 – 28
J
Jumper, selezione segnali analogici, 5 – 27
L
Libreria funzioni, 5 – 1
Limitazione coppia, 11 – 8
M
Marchio, inverter, a
Marchio CE, a
Materiale utilizzato, b
Menu ALL, 3 – 6
Impostazioni di default, parametri drive, 3 – 6
Menu utente, 4 – 8, 5 – 62
impostazione rapida, 3 – 4
impostazioni di default, 3 – 5
variazione delle voci, 4 – 8
Ingressi
digitali, tempi di risposta, 5 – 50
PTC, 5 – 55
Messaggi di errore, 6 – 6
esterni, 5 – 56
reset, 6 – 8
Ingresso analogico 1
guadagno, 5 – 27
offset, 5 – 27
Modalità di controllo, 5 – 3
selezione , 5 – 3
Impostazione Vmin, 5 – 7
Ingresso in frequenza, digitale, 5 – 30
Inserimento valore di riferimento, 5 – 26
Installazione
altitudine consentita, 1 – 3
collegamento elettrico, 2 – 10
installazione fisica, 2 – 7
tastiera, 4 – 5
I–4
Moduli di comunicazione
Vedi Modulo PROFIBUS
Vedi Modulo comunicazione
RS232C / RS485
Modulo comunicazione RS232C / RS485
accessori per la comunicazione, 4 – 11
baud rate, 4 – 11
collegamento a PC o PLC, 4 – 13
Matsushita Electric Works Italia
VF–CE Compatti
controllo comunicazione, 4 – 16
dati tecnici, 4 – 11
impostazione parametri, 4 – 11, 4 – 14
note sui cavi PC, 4 – 13
protocollo di funzionamento, 4 – 15
soluzione di problemi ed eliminazione di
errori, 4 – 18
tabella codici, 4 – 14
tempo di comunicazione, 4 – 11
tempo di risposta abbreviato, 4 – 16
Indice analitico
modifica e salvataggio da tastiera, 4 – 7
Parametri drive, impostazioni di default, 3 – 6
Password
cancellazione, 4 – 10
inserimento, 4 – 9
Password di protezione, 4 – 9, 5 – 62
attivare una funzione protetta, 4 – 10
attivazione, 4 – 9
disattivazione permanente, 4 – 10
Modulo I/U standard
avviamento, 3 – 7
descrizione terminali, 2 – 14
Password utente, 5 – 62
Modulo PROFIBUS
avviamento, 3 – 9
impostazione parametri, 4 – 19
inserimento valori di riferimento, 5 – 36
Potenziometro motore, 5 – 32
Motore
controllo termico
con PTC , 5 – 55
senza sensori, 5 – 53
errore di fase, A – 17
funzionamento ad alte frequenze, 5 – 7
Protezione delle persone, e, 2 – 3
con altre misure, 2 – 4
con RCCB, 2 – 3
Motori a riluttanza, a
Motori sincroni con smorzatore, a
Motori speciali, 5 – 12
Motori standard asincroni, a
O
Offset
ingresso analogico 1, 5 – 27
uscita analogica 1, 5 – 47
Omologazioni, 1 – 3
Ore di funzionamento, 5 – 58
Oscillazione, attenuazione, 5 – 11
Ottimizzazione del funzionamento, 5 – 9
P
Parametri, 4 – 3
modifica e salvataggio con modulo
RS232C, 4 – 14
Matsushita Electric Works Italia
Posizione di montaggio, 1 – 3
Potenza nominale, riduzione, 5 – 19
Precontrollo frequenza, 5 – 43
Protezione dal contatto, 2 – 4
Protezione motore, 2 – 5
Protezioni presenti, 1 – 3
Protocollo di funzionamento, modulo
RS232C/RS485, 4 – 15
Punto di riferimento bipolare, regolazione,
5 – 29
Punto di riferimento unipolare, regolazione,
5 – 28
R
RCCB, 2 – 3
Regolazione
punto di riferimento bipolare, 5 – 29
punto di riferimento unipolare, 5 – 28
Reset, messaggi di errore, 6 – 8
Reset TRIP automatico, 6 – 8
Resistenza alle vibrazioni, 1 – 3
Resistenza di frenatura, 9 – 3
esempi applicativi, 9 – 6
installazione, 9 – 5
valore nominale, 9 – 7
I–5
Indice analitico
Resistenza di frenatura esterna,
collegamento, 2 – 12
Resistenza di isolamento, 1 – 3
Responsabiltà, b
Rete di più drive
alimentazione centrale, 8 – 15
alimentazione DC centrale/esterna, 8 – 15
alimentazione decentralizzata, 8 – 16
alimentazione decentralizzata per mono e
bifase, 8 – 16
alimentazione decentralizzata per trifase,
8 – 17
collegamento circuito principale, 8 – 4
condizioni, 8 – 4
connessione bus DC, 8 – 6
filtri e ferriti del circuito principale, 8 – 10
frenata, 8 – 18
funzione, 8 – 3
protezione connessioni, 8 – 8
selezione, 8 – 10
Ricevute
negative, 4 – 18
positive, 4 – 18
Riduzioni di potenza, 1 – 3
Rilevamento dati motore, 5 – 38
Rilevamento errori esterni, 5 – 55
Rilevamento inconvenienti di terra, 5 – 55
Rumorosità, 1 – 3
S
Salti di frequenza, 5 – 12
Scambio valori di riferimento, 5 – 36
Segnali di ingresso digitali , 5 – 50
configurazione, 5 – 50
Segnali di uscita
analogici, configurazione, 5 – 47
digitali, configurazione, 5 – 52
VF–CE Compatti
Selezione segnali
analogici, 5 – 27
posizione jumper , 5 – 27
digitali, 5 – 30
Selezione valori di riferimento, 5 – 26
Selezione valori effettivi, 5 – 26
controllo PID, 5 – 45
Set dei parametri
gestione , 5 – 59
sostituzione, 5 – 61
trasferimento, 5 – 59, A – 4
variazione da tastiera, 4 – 8
Simboli importanti, g
Sistema di bus, inserimento valore di
riferimento, 5 – 36
Soluzione dei problemi, 6 – 1, 6 – 3
con lo storico errori, 6 – 5
funzionamento errato del drive, 6 – 4
LED display, 6 – 3
messaggi di errore, 6 – 6
reset dei messaggi di errore, 6 – 8
TRIP, 6 – 8
Soluzione di problemi ed eliminazione di
errori, modulo RS232C/RS485, 4 – 18
Sottocodici , 4 – 3
Spazio libero per l’installazione, 1 – 3
Specifiche dei cavi , 2 – 6
Stato di funzionamento
RS232C, 4 – 15
visualizzazione, 6 – 3
Stop di emergenza, blocco inverter , 5 – 16
Storico degli errori, 6 – 5
T
Segnali di uscita analogici, 5 – 47
Tabella codici, A – 3
modulo comunicazione RS232C/RS485,
4 – 14
segnali analogici, 5 – 26
Segnali di uscita digitali, 5 – 52
Tasti funzione, tastiera, 4 – 6
I–6
Matsushita Electric Works Italia
VF–CE Compatti
Tastiera, 4 – 4
attivare una funzione protetta, 4 – 10
attivazione password di protezione, 4 – 9
dati tecnici, 4 – 4
disattivazione permanente protezione
password, 4 – 10
display a barre, 4 – 6
inserimento valore di riferimento, 5 – 35
installazione, 4 – 5
modifica e salvataggio parametri , 4 – 7
tasti funzione, 4 – 6
variazione set di parametri, 4 – 8
visualizzazione stato, 4 – 6
visualizzazioni e funzioni, 4 – 6
Tempi di accelerazione, 5 – 20
Tempi di decelerazione, 5 – 20
Tempi di risposta ingressi digitali, 5 – 50
Tempo attivazione circuito, 5 – 58
Tempo azione integrale, controllo Imax, 5 – 46
Tempo di comunicazione, modulo
RS232C/RS485, 4 – 12
Tempo di risposta abbreviato, modulo
comunicazione RS232C/RS485, 4 – 16
Terminologia
definizioni, Prefazione – 1
drive, Prefazione – 1
VF–CE, Prefazione – 1
Indice analitico
Uscite analogiche, configurazione, 5 – 47
Uscite digitali, 5 – 52
Uscite digitali, configurazione, 5 – 52
Utilizzo, a
V
Valore di riferimento
campo inserimento, modulo I/U standard,
5 – 27
ingresso digitale, 5 – 30
scambio, 5 – 36
selezione, 5 – 26
Valore di riferimento, impostazione, 5 – 26
bipolare, 5 – 29
campo , 5 – 27
controllo PID, 5 – 43
tramite frequenze di JOG, 5 – 34
tramite potenziometro motore, 5 – 32
tramite sistema di bus, 5 – 36
tramite tastiera, 5 – 35
unipolare, 5 – 28
Valori di limite, 5 – 17
impostazione, 5 – 17
Valori di limite della corrente, 5 – 18
Trasferimento set parametri, 5 – 59, A – 4
Valori nominali
freno con transistor incorporato, 9 – 4
funzionamento 120% sovraccarico, 1 – 7
funzionamento 150% sovraccarico, 1 – 5
Trasporto, magazzinaggio, c
Variazioni di frequenza, 5 – 11
TRIP, 6 – 8
Velocità coppia, 1 – 4
TRIP set, 5 – 56
Velocità eccessive, f
Tipo di inverter, 5 – 58
Versione software, 5 – 58
U
Umidità consentita, 1 – 3
Uscita a relè
collegamento , 2 – 16
configurazione, 5 – 52
Uscita analogica 1
guadagno, 5 – 47
offset, 5 – 47
Matsushita Electric Works Italia
VF–CE, descrizione, Prefazione – 1
Visualizzazione
stato di funzionamento, 6 – 3
dati di funzionamento, 5 – 57
display a barre, 4 – 6
stato di funzionamento, 4 – 6
tastiera, 4 – 6
tipo, 5 – 58
versione software, 5 – 58
I–7
Indice analitico
I–8
VF–CE Compatti
Matsushita Electric Works Italia
Aggiornamenti
Codice manuale
Data
Descrizione
ACG–M0180IT V1.0
02/2002
Prima edizione in italiano
ACG–M0180V1.1ITD
07/2002
Formato B5, correzione di definizioni e dati tecnici
Matsushita Automation Controls
R–1
Aggiornamenti
VF–CE Compatti
Rete di assistenza globale
Nord America
Aromat
Corporation
Europa
Matsushita
Electric Works
Asia
Matsushita
Electric Works
Cina
Matsushita
Electric Works
Giappone
Matsushita
Electric Works Ltd.
Automation Controls
Group
Europa
H Austria
Matsushita Electric Works Austria GmbH
H Benelux
Matsushita Electric Works Benelux B. V.
H Francia
Matsushita Electric Works France S.A.R.L.
Stojanstraße 12, 2344 Maria Enzersdorf, Austria, Tel. (02236) 2 68 46, Fax (02236) 46133, http://www.matsushita.at
De Rijn 4, (Postbus 211), 5684 PJ Best, (5680 AE Best), Netherlands, Tel. (0499) 37 2727, Fax (0499) 372185, http://www.matsushita.nl
B.P. 44, 91371 Verrières le Buisson CEDEX, France, Tel. 01 60 13 57 57, Fax 01 60 13 57 58, http://www.matsushita–france.fr
H Germania
Matsushita Electric Works Deutschland GmbH
Rudolf–Diesel–Ring 2, 83607 Holzkirchen, Germany, Tel. (08024) 648–0, Fax (08024) 648–555, http://www.matsushita.de
H Irlanda
Matsushita Electric Works Ltd., Irish Branch Office
Waverley, Old Naas Road, Bluebell, Dublin 12, Republic of Ireland, Tel. (01) 460 09 69, Fax (01) 460 11 31
H Italia
Matsushita Electric Works Italia s.r.l.
H Portogallo
Matsushita Electric Works Portugal, Portuguese Branch Office
H Regno Unito
Matsushita Electric Works UK Ltd.
Via del Commercio 3–5 (Z.I. Ferlina), 37012 Bussolengo (VR), Italy, Tel. (045) 675 27 11, Fax (045) 670 04 44, http://www.matsushita.it
Avda 25 de Abril, Edificio Alvorada 5º E, 2750 Cascais, Portugal, Tel. (351) 1482 82 66, Fax (351) 1482 74 21
Sunrise Parkway, Linford Wood East, Milton Keynes, MK14 6LF, England, Tel. (01908) 231 555, Fax (01908) 231 599,
http://www.matsushita.co.uk
H Scandinavia
Matsushita Electric Works Scandinavia AB
H Spagna
Matsushita Electric Works España S.A.
Sjöängsvägen 10, 19272 Sollentuna, Sweden, Tel. +46 8 59 47 66 80, Fax (+46) 8 59 47 66 90, http://www.mac–europe.com
Parque Empresarial Barajas, San Severo, 20, 28042 Madrid, Spain, Tel. (91) 329 38 75, Fax (91) 329 29 76
H Svizzera
Matsushita Electric Works Schweiz AG
Grundstrasse 8, 6343 Rotkreuz, Switzerland, Tel. (041) 799 70 50, Fax (041) 799 70 55, http://www.matsushita.ch
Nord e Sud America
H USA
Aromat Corporation Head Office USA
629 Central Avenue, New Providence, N.J. 07974, USA, Tel. 1–908–464–3550, Fax 1–908–464–8513, http://www.aromat.com
Asia
H Cina
Matsushita Electric Works, Ltd. China Office
2013, Beijing Fortune, Building 5, Dong San Huan Bei Lu, Chaoyang District, Beijing, China, Tel. 86–10–6590–8646, Fax 86–10–6590–8647
H Hong Kong
Matsushita Electric Works Ltd. Hong Kong
H Giappone
Matsushita Electric Works Ltd. Automation Controls Group
H Singapore
Matsushita Electric Works Pte. Ltd. (Asia Pacific)
Rm1601, 16/F, Tower 2, The Gateway, 25 Canton Road, Tsimshatsui, Kowloon, Hong Kong, Tel. (852) 2956–3118, Fax (852) 2956–0398
1048 Kadoma, Kadoma–shi, Osaka 571–8686, Japan, Tel. 06–6908–1050, Fax 06–6908–5781, http://www.mew.co.jp/e–acg/
101 Thomson Road, #25–03/05, United Square, Singapore 307591,Tel. (65) 255–5473, Fax (65) 253–5689
COPYRIGHT E
2002 Tutti i diritti riservati
Manuale e prodotti sono soggetti a moifiche senza preavviso.
ARCT1F0000ABC V1.x 12/99
by Adv. Dept. MEW – I