Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
Lezione n.18
Metodo dell’Integrale di Convoluzione e circuiti impulsivi
1.
2.
3.
Risposta all’ impulso
Metodo dell’Integrale di convoluzione
2.1 La “costruzione” della convoluzione
Circuiti impulsivi
Nella Lezione n.17 abbiamo visto come sia possibile calcolare la
risposta forzata di un circuito utilizzando la trasformata di Laplace. In
questa lezione vediamo come è possibile calcolare la risposta forzata
direttamente nel dominio del tempo, grazie all’utilizzo del metodo
dell’Integrale di Convoluzione. L’utilizzo di questo metodo si basa
sulla conoscenza della risposta all’impulso.
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
1
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
1. Risposta all’impulso
Nella Lezione n.17 abbiamo introdotto la risposta all’impulso, la funzione h(t). Tale
funzione l’abbiamo introdotta come antitrasformata della funzione di trasferimento
H(s), cioè:
h(t ) = L−1 {H(s )} .
(1)
Effettivamente, data la semplicità di calcolo della funzione di trasferimento, risulta
conveniente determinare la h(t) usando la (1).
Focalizziamoci sui circuiti del II ordine. In particolare ricordiamo che la struttura
matematica della funzione di trasferimento è costituita da un rapporto di polinomi,
con il grado del numeratore minore sempre di quello del denominatore, e che il
polinomio al denominatore corrisponde al polinomio caratteristico del circuito.
Quindi i poli della funzione di trasferimento saranno le frequenze naturali.
Sappiamo che possiamo avere 3 casi (confronta la (29) della Lezione n. 9):
a) ∆<0 → soluzioni sono complesse coniugate:
λ1 = λ = −α + jω 0 ; λ2 = λ* = −α − jω 0 ;ω 0 = α 2 − ω 2
b) ∆=0 → soluzioni sono reali e coincidenti λ1, 2 = −α
c) ∆>0 → soluzioni sono reali e distinte λ1, 2 = −α ± α 2 − ω 2
In corrispondenza avremo una funzione di trasferimento:
as + b
,
(s − λ )(s − λ *)
as + b
H (s ) =
,
(s + α )2
as + b
H (s ) =
.
(s − λ1 )(s − λ2 )
H (s ) =
(2a)
(2b)
(2c)
Il numeratore avrà la stessa forma matematica che dipende dal termine forzante
dell’equazione differenziale. Per antitrasformare dobbiamo scomporre in fratti
semplici. Rispettivamente abbiamo:
k
k*
+
.
(s − λ ) (s − λ *)
k1
k2
H (s ) =
+
.
(s + α ) (s + α )2
H (s ) =
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
(2a)
(2b)
2
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
H (s ) =
k1
k2
+
.
(s − λ1 ) (s − λ2 )
(2c)
Dove abbiamo dovuto calcolare i residui relativi ai singoli fratti:
[(s − λ )H(s )],
k = lim
s →λ
(3a)
d
2
2
(
)
(
s + α ) H(s ) , k 2 = slim
s
+
α
H (s )
→−α
s→−α
ds
[
k 1 = lim
]
[
]
k 1 = lim[(s − λ1 )H(s )], k 2 = lim[(s − λ2 )H(s )] .
s →λ1
s → λ2
(3b)
(3c)
Ricordando che:
1
1
L−1 = u (t ) e L−1 2 = tu (t ) ,
s
s
(4)
Possiamo antitrasformare le (2) ottenendo il risultato previsto seguente:
h(t ) = e −αt (k1cos (ω0 (t ) ) + k2 sen(ω0 (t ) ))
(5a)
dove abbiamo posto:
k1 = k + k * e k 2 = j (k − k *) .
h(t ) = (k1 + k 2 t )e −αt ,
(5b)
h(t ) = k1e λ t + k 2 e λ t .
(5c)
1
2
Con le (5) abbiamo ritrovato la forma di una evoluzione libera!
Il metodo descritto sopra, utilizzato per determinare la risposta all’impulso h(t), che si
fonda sull’antitrasformata della funzione di trasferimento serve di fatto a determinare
i coefficienti che moltiplicano i due esponenziali.
In realtà la risposta all’impulso, e quindi i coefficienti sopra citati, è possibile
valutarla anche direttamente nel dominio del tempo. Vediamo come si procede. Ci
sono due strade:
1) Attraverso il bilanciamento degli impulsi.
Si procede in questo modo:
Si determina quali grandezze del circuito (escluse le variabili di stato) sono impulsive
(lo faremo nel paragrafo 3).
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
3
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
In particolare si verifica se la grandezza dei bipoli dinamici che non è variabile di
stato è impulsiva. Se non lo è la variabile di stato in questione rimane continua in
zero, altrimenti si integra la relazione caratteristica del relativo bipolo e si valuta il
valore a cui si porta, grazie ad una discontinuità di I specie, la variabile di stato.
Supponiamo di avere un circuito RLC. Allora se, trovandosi allo stato di riposo, lo
alimentiamo con un generatore impulsivo potrà accadere che la tensione sul
condensatore sia discontinua e la corrente nell’induttore sia discontinua. Potrebbe
anche accadere che solo una delle variabili di stato sia discontinua. Dipende dalla
struttura del circuito. Se questo si verifica possiamo utilizzare (confronta paragrafo 3
della Lezione n.7) la relazione caratteristica:
iC (t ) = C
d
d
vC (t ) , v L (t ) = L iL (t ) .
dt
dt
(6)
Affinchè la vC e la iL abbiamo un salto di discontinuità, deve accadere che iC e vL
siano impulsive. Ciò, come detto dipenderà dal circuito. Se accade integriamo la (6)
ottenendo:
t 0+
vC ( t 0+ )
∫ K δ (t − t )dt = ∫ Cdv
0
C
t 0−
vC ( t 0− )
t 0+
iL ( t 0+ )
∫ K δ (t − t )dt = ∫ Ldi
0
L
t 0−
L
C
,
.
(7a)
(7b)
i L ( t 0− )
dove le costanti K L e K C dipenderanno dal circuito. Impareremo a calcolarle nel
paragrafo 3.
KC
,
C
K
= iL 0 − + L .
L
( )
( )
vC 0 + = vC 0 − +
( )
iL 0 +
( )
(8a)
(8b)
Infine si calcola l’evoluzione libera a partire dal valore che abbiamo trovato in 0+
delle variabili di stato trattate come normali condizioni iniziali.
Nel paragrafo 3 faremo vedere come determinare le grandezze impulsive con il
cosiddetto metodo del bilanciamento degli impulsi.
2) Si trova la risposta al gradino unitario e poi si deriva tale risposta.
Ricordiamo dalla (14) della Lezione n.7 che:
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
4
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
t
u (t ) = ∫ δ (τ )dτ ;
−∞
d
u (t ) = δ (t ) .
dt
(9)
Le relazioni (9) ci suggeriscono di poter modellare il generatore impulsivo come un
generatore a gradino, calcolare la risposta al gradino, chiamiamola xu(t) e poi
derivarla ottenendo la risposta all’impulso. In un sistema lineare posso applicare
l’operatore di derivata all’ingresso ottenendo la derivata dell’uscita. Ricordiamo
infatti che la derivata è un operatore lineare.
Ad esempio per il circuito RC serie (confronta la (2) Lezione n.11):
vCu (t ) = −e
−
t
RC
+1
(10)
t>0.
E quindi la risposta all’impulso:
1 − RCt
h(t ) =
e
RC
(11)
t>0.
La (11) potevamo trovarla anche come una evoluzione libera a partire da condizioni
iniziali pari a 1/RC. Questa la potevamo trovare ammettendo che la corrente della
maglia è pari a 1/R δ(t) (essendo δ(t) l’impulso del generatore) in quanto la si ricava
dalla tensione impulsiva sul resistore (uguale a quella del generatore) diviso la
resistenza. La costante C al denominatore viene fuori dall’integrazione della relazione
caratteristica del condensatore.
2. Metodo dell’Integrale di convoluzione
Abbiamo visto nella Lezione n.17 che talvolta non risulta praticabile determinare la
soluzione x(t) come antitrasformata della soluzione X(s) nel dominio di Laplace. In
questo caso si può trovare la soluzione direttamente nel dominio del tempo
utilizzando il metodo dell’Integrale di Convoluzione (mIC).
Alla base del mIC c’è il teorema della convoluzione che afferma che al prodotto di
funzioni in un dominio corrisponde l’integrale di convoluzione nell’altro dominio.
Vediamo meglio. Se ho due funzioni nel dominio della trasformata di Laplace, F(s) e
G(s). La funzione prodotto delle due funzioni si trasforma nel dominio del tempo nel
modo che segue:
t+
t+
0−
0−
L {F( s )G ( s )} = ∫ f (τ ) g (t − τ )dτ = ∫ f (t − τ ) g (τ )dτ ,
−1
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
(12)
5
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
dove al secondo membro abbiamo appunto l’integrale di convoluzione tra le due
funzioni considerate f(t) e g(t) che abbiamo supposto essere nulle per t<0.
Osserviamo che il ruolo delle due funzioni f(t) e g(t) che compaiono nell’integrale è
interscambiabile, cioè:
t+
t+
−
−
∫ f (t − τ ) g (τ )dτ = ∫ f (τ ) g (t − τ )dτ .
0
0
(13)
Usiamo la (12) per dare una espressione alla soluzione x(t) che stiamo cercando
direttamente nel dominio del tempo
t+
x(t ) = L {H ( s )G ( s )} = ∫ h(t − τ ) g (τ )dτ .
−1
(14)
0−
Spendiamo due parole per commentare gli estremi di integrazione che compaiono
nell’integrale (14). Usiamo 0- perchè vogliamo tenere in conto eventuali impulsi
dell’ingresso g(t) presenti in zero. Usiamo t come estremo superiore di integrazione
perché per il principio di causalità h(t)=0 per t<0 e quindi h(t-τ)=0 per τ>t. Il
principio di causalità dice che non è possibile osservare una risposta di un sistema (in
questo caso la risposta all’impulso) prima che la causa (in questo caso l’impulso in
zero) si sia accesa. Usiamo t+ per contemplare eventuali impulsi del generatore
presenti in t.
Per rendere operativa la formula (14) bisogna comunque conoscere la risposta all’
impulso h(t). Questa come abbiamo visto nel paragrafo precedente si può calcolare in
diversi modi. In ogni caso abbiamo che la forma della h(t) è quella di una evoluzione
libera, cioè è una combinazione lineare di esponenziali. Tralasciando il caso ∆=0,
possiamo scrivere:
t+
x(t ) = k 1 ∫ g (τ )e
λ1 ( t −τ )
t+
dτ +k 2 ∫ g (τ )e λ (t −τ ) dτ
0−
(15)
2
0−
dove k1 e k2 sono i coefficienti della risposta impulsiva.
Mettendo in evidenza gli esponenziali con esponente indipendente dalla variabile di
integrazione:
t+
x(t ) = k 1e
λ1t
∫ g (τ )e
0−
t+
− λ1τ
dτ +k 2 e
λ2t
∫ g (τ )e
− λ2τ
dτ .
(16)
0−
Come si vede dunque la funzione integrando risulta molto semplice nella forma.
Certo il grado di difficoltà dipende dalla funzione g(t).
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
6
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
Consideriamo un caso semplicissimo: g(t)=C.
Dalla (16) ricaviamo:
t+
x(t ) = k 1Ce
λ1t
t+
∫e
− λ1τ
dτ +k 2 Ce
0−
λ2t
∫e
− λ2τ
dτ .
(17)
0−
Essendo:
t+
∫e
− λ1τ
dτ =
0−
t+
1
e −λ τ
=
1
λ1
0−
1
λ1
(e
− λ1t
− 1) ,
(18)
possiamo scrivere la soluzione:
x(t ) = −
k 1C
λ1
e λ1t −
k
k
e λ2t − 1 + 2 C .
λ2
λ1 λ2
k 2C
(19)
A voi verificare che questa soluzione sia coerente con quella trovata direttamente nel
dominio del tempo.
2.1 La “costruzione” della Convoluzione
Mostriamo un modo, diciamolo “empirico”, per trovare la formula (14) con la
convoluzione per la soluzione . Supponiamo di avere un circuito con un ingresso g(t)
definito in 0<t<T come in Fig. 1. Vogliamo calcolare la risposta a questo ingresso
avendo supposto che il sistema si trovi a stato zero quando in t=0 il generatore si
accende.
Consideriamo, in Fig. 2, una approssimazione della funzione di Fig. 1 realizzata con
una approssimazione lineare a tratti. Il passo di campionamento sarà omogeneo e di
valore pari a ∆t =T/n. Quindi ∆t=t2-t1. La funzione viene approssimata con un valore
costante nei singoli intervalli pari al valore che assume la funzione nell’estremo
sinistro dell’intervallo stesso.
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
7
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
g(t)
T
t
Fig. 1 – Generatore in ingresso ad un generico circuito.
g(t)
0
t1
t2
t3
tn-2
tn-1
t
Fig. 2 – Approssimazione della funzione di ingresso di Fig. 1.
Possiamo dare la seguente forma alla funzione approssimata:
n −1
g ∆ (t ) = ∑ P∆ (t − i∆t )g (t i )∆t
(20)
i =0
con t0=0. Nella (20) abbiamo usato la funzione che così definiamo:
0
1
P∆ (t ) =
∆t
0
t<0
0 < t < ∆t
(21)
t > ∆t
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
8
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
Abbiamo quindi approssimato la funzione di ingresso come sovrapposizione di tante
funzioni, allora la risposta a questo ingresso potrà essere approssimata con la
sovrapposizione delle risposte alle singole componenti della funzione d’ingresso.
Possiamo, pertanto, scrivere:
n −1
x∆ (t ) = ∑ h∆ (t − i∆t )g (t i )∆t ,
(22)
i=0
dove la funzione h∆(t) rappresenta la soluzione del circuito quando in ingresso
consideriamo la sola P∆(t) (vedi Fig. 3).
P∆(t)
Circuito
LTI a stato
zero
h∆(t)
Fig. 3 – Relazione ingresso – uscita.
Ora, per ottenere la funzione g(t) dobbiamo valutare il limite per ∆t → 0 della (20).
Scriviamo:
n −1
T
i =0
0
g (t ) = lim
g ∆ (t ) = lim
∑ P∆ (t − i∆t )g (ti )∆t = ∫ δ (t − τ )g (τ )dτ .
∆t →0
∆t → 0
(23)
In corrispondenza dobbiamo valutare il limite per ∆t → 0 della risposta:
n −1
t
i=0
0
x(t ) = lim
x (t ) = lim
∑ h∆ (t − i∆t )g (ti )∆t = ∫ h(t − τ )g (τ )dτ ,
∆t →0 ∆
∆t →0
(24)
dove abbiamo posto
lim
h (t − i∆t ) = h(t − τ ) .
∆t →0 ∆
Abbiamo così ritrovato la formula (14) su cui si base il mIC.
3. Circuiti impulsivi
In questo paragrafo vediamo come trattare un circuito con generatore impulsivo. Si
tratta di verificare quali grandezze si comportano in modo impulsivo e quali, invece,
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
9
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
rimangono limitate; nello stesso tempo è necessario verificare se le variabili di stato
sono discontinue o meno in corrispondenza dell’impulso del generatore.
Il modo di procedere è quello di scrivere regolarmente le leggi di Kirchhoff ai nodi e
alle maglie. Poi è necessario separare ogni equazione nella parte limitata e in quella
impulsiva. A questo punto si “bilanciano” gli impulsi verificando quale grandezza
“bilancia” l’impulso del generatore. Infatti in un circuito impulsivo possiamo scrivere
in generale per le grandezze del circuito:
x(t ) = xδ (t ) + xlim (t ) .
(25)
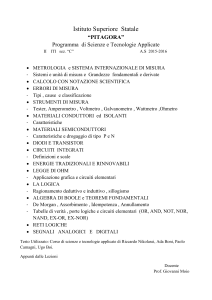
Vediamo con un esempio come si procede. Consideriamo il circuito RLC serie. Nella
Lezione n. 6 abbiamo scritto nel sistema (3):
dv4
i3 = C dt
di
e(t ) - Ri3 - L 3 - v4 = 0
dt
(26)
v2
v3
i2
I
i1
R
e(t)
v1
i3
II
III
i4
L
v4
C
IV
Fig.4 – Circuito “RLC serie”.
Separando il sistema (26) nella parte impulsiva e limitata abbiamo due sistemi. Il
primo:
dv 4
i3 δ = C
dt δ
δ (t ) - Ri3 - L di3
δ
dt
(27)
- v4 δ = 0
δ
dove abbiamo eliminato i termini contenenti i3 e v4 che non possono essere impulsivi.
Si vede che chi bilancia l’impulso del generatore è la tensione sull’induttore. Quindi
avremo una discontinuità nella corrente dell’induttore, mentre la tensione del
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
10
Lezione 18 – Metodo dell’Integrale di Convoluzione e circuiti impulsivi
condensatore deve rimane continua in quanto la corrente che lo attraversa è uguale a
quella dell’induttore.
Il sistema per la parte limitata:
dv4
i3 l = C
dt l
Ri3 + L di3 + v4 = 0
l
l
dt l
(28)
come si vede ovviamente manca la tensione e(t) del generatore in quanto questa ha
solo una parte impulsiva. Il sistema (28) servirà a calcolare l’andamento delle
grandezze per t>0, istante in cui è stato applicato l’impulso del generatore. E’
un’evoluzione libera. E’ la risposta all’impulso!
Ma quali sono le condizioni iniziali da utilizzare per risolvere il sistema (28)? Queste
devono essere determinate integrando le equazioni del sistema (27). Facendo così,
infatti possiamo valutare il salto di discontinuità, e quindi la condizione in 0+ della i3,
mentre la v4 rimane nulla.
3.1 Esercizio
Esercizio svolto in classe …..
Corso di Introduzione ai Circuiti – Prof.ssa Lorenza Corti – A.A. 2009/10
11