4
Computer
Premessa
Con computer indichiamo oggi l’elaboratore monoutente usato sia in ambiente domestico sia in ambiente lavorativo. In realtà questa tipologia di
computer, che si chiama «personal computer desktop» (elaboratore personale da scrivania) è solo una delle tante tipologie esistenti, ma è sicuramente la più diffusa e la più conosciuta. Questa tipologia, il cui nome
prende origine dal tipo di «case» (la scatola che contiene schede e circuiti)
dei primi personal computer, che si sviluppava orizzontalmente per essere
poggiato sulla scrivania, è diventata il paradigma per indicare in generale
il computer. La comparsa del personal computer nei primi anni ottanta, di
fatto, permette il passaggio dall’informatica centralizzata che prevedeva il
collegamento di molti utenti a un unico elaboratore potente, all’informatica distribuita, che consiste nel collegare in rete i computer, e quindi gli
utenti, che possono così condividere le singole risorse.
Lo studio di tutti i componenti hardware e software che cooperano per
permettere al computer di essere lo strumento poliedrico che conosciamo
saranno argomento di trattazione dettagliata nei prossimi capitoli. Qui vogliamo rilevare come la giusta scelta dei componenti hardware e di quelli
software, sia alla base di ogni sistema informatico, che sia costituito da un
solo computer o da una rete di computer; le esigenze di un piccolo punto
commerciale saranno sicuramente diverse da quelle di una catena di negozi
e il tipo o il numero di computer e i programmi applicativi che utilizzeranno non solo saranno diversi ma dovranno soprattutto essere calibrati alle
diverse esigenze.
56
4 Computer
Sistemista è il nome dato alla figura professionale che partecipa, o opera
direttamente, alla definizione dell’infrastruttura informatica e alla scelta e
al dimensionamento dell’hardware da utilizzare. Il sistemista deve inoltre
saper gestire e configurare hardware e software eterogenei, che richiedono
conoscenze ed esperienza disparate, assicurare il monitoraggio dell’evoluzione tecnologica dei componenti (sia hardware che software), nonché la
loro ottimizzazione e il loro costante aggiornamento; deve infine saper valutare performance, sicurezza e funzionalità del sistema e deve anche saper
rispondere alle richieste, dirette o indirette, degli utenti del sistema stesso.
Il sistemista, come qualsiasi altro professionista, deve sapere documentare
approfonditamente il lavoro svolto.
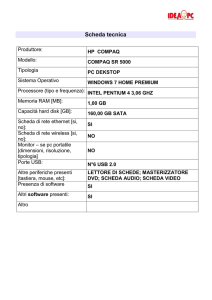
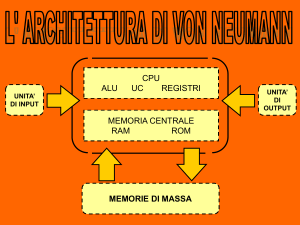
1 La macchina di von Neumann e
il computer moderno
Negli anni successivi alla fine della seconda guerra mondiale, il matematico ungherese John Von Neumann ipotizzò uno schema di macchina che
ancora oggi è considerato il progetto logico dell’architettura del computer
moderno. Von Neumann teorizzò una macchina esecutrice di algoritmi che
realizzava il progetto che Alan Turing aveva esposto nel 1936 e che non era
mai stato realizzato.
La macchina di von Neumann prevede 5 componenti fondamentali:
•un’unità per l’inserimento di dati e istruzioni all’interno della macchina;
•un’unità in grado di memorizzare i dati;
•un’unità in grado di elaborare i dati;
•un’unità per comunicare all’esterno i risultati prodotti dall’elaborazione;
•un canale che collega tra loro le varie unità per lo scambio dei dati.
CPU
MEMORIA
CENTRALE
ALU
CU
BUS
UNITÀ
INPUT
UNITÀ
OUTPUT
Figura 1
Schema di von Neumann.
1 La «macchina» di von Neumann e il computer moderno
57
PLe unità per l’inserimento dei dati e delle istruzioni e per comunicare all’esterno i risultati vengono chiamate unità di input/output e nei
moderni computer questa funzione è svolta da dispositivi quali tastiera, mouse, video, stampante ecc.
Ma il «cervello» della macchina di von Neumann è costituito dall’unità
che elabora i dati (CPU – Central Processing Unit) e da quella li memorizza
(RAM – Random Access Memory).
PLa CPU è a sua volta composta dall’unità di controllo (CU – Control
Unit), che governa la sequenza delle operazioni in modo che queste
siano eseguite in maniera corretta e dall’unità aritmetico-logica (ALU,
Arithmetic-Logic Unit), che svolge le operazioni logiche e aritmetiche
specificate nelle istruzioni.
La CU al suo interno contiene due registri:
•Instruction Register (IR) che è il registro dove un’istruzione prelevata
dalla memoria viene interpretata prima di essere eseguita;
•Program Counter (PC) che è il registro contatore di programma e che
individua l’indirizzo della locazione di memoria contenente l’istruzione
successiva.
Un canale chiamato bus di sistema, infine, consente alle varie unità di
scambiarsi le informazioni.
PL’esecuzione di un programma avviene grazie all’alternarsi delle
fasi di «fetch» (prelievo) e «execute» (esecuzione), con una velocità che oggi arriva a miliardi di volte al secondo, all’interno della
CPU.
Osservazione Durante la fase di «fetch» l’istruzione che si trova
nella locazione di memoria il cui indirizzo è contenuto nel registro
Program Counter viene letta e copiata nel registro Instruction Register dall’unità di controllo; subito dopo viene incrementato il valore del registro PC in modo che contenga l’indirizzo dell’istruzione
successiva da eseguire; nella successiva fase di «execute» l’istruzione
presente nell’Instruction Register viene interpretata e quindi eseguita.
Registro
Il registro è una piccola unità di
memoria temporanea (2, 4, 8,
16 byte) con tempi di accesso
molto più bassi della memoria
primaria e che ospita le informazioni necessarie per eseguire una singola istruzione.
58
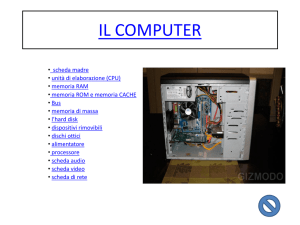
L’architettura del computer moderno continua, dopo sessanta anni, a basarsi sullo schema logico proposto da von Neumann pur avendo una struttura interna molto più complessa; nella figura sottostante è illustrato il tipico schema organizzativo di un personal computer che esamineremo nel
dettaglio nei prossimi paragrafi.
AGGIUNGERE 4 RIGHE!
4 Computer
CPU
Slot della
scheda grafica
Clock
Front-side
bus
Slot della RAM
bus della
memoria
Controllore
della
memoria
bus AGP
bus interno
Bus PCI
Controllore
degli I/O
GPU
Bus PCI
PATA
SATA
USB
Ethernet
Audio
Slot PCI
Connettori
verso
periferiche
esterne
Bus LPC
Super I/O
EFI
Figura 2
2 Classificazione delle tipologie di
computer
I computer possono essere classificati sia per la specificità di utilizzo (uso
generale – «general purpose» – o uso specifico – «special purpose»), sia per
la potenza di calcolo, la capacità di archiviazione dei dati e le dimensioni.
La classificazione più utilizzata è sicuramente quest’ultima e seguendo questi criteri i computer possono essere suddivisi in:
•Super Computer
•Mainframe
•Minicomputer
•Microcomputer
Vediamo nel dettaglio tutte queste diverse tipologie:
Supercomputer – Nati negli anni ’60 del secolo precedente, hanno elevatissime velocità di calcolo riuscendo a elaborare più di 1012 operazioni il
2 Classificazione delle tipologie di computer
59
secondo (vale a dire 1000 miliardi). La loro velocità non è tanto frutto della
qualità dei processori che lo compongono, ma del fatto che questi computer hanno centinaia se non migliaia di processori che lavorano in parallelo.
I Supercomputer sono concepiti per servire un singolo scopo e grazie alla
loro capacità di elaborazione ad altissima velocità sono utilizzati in ambiti
molto speciali, dove è richiesta una notevole potenza di calcolo, come per
esempio le previsioni meteorologiche, i voli spaziali, l’animazione grafica,
gli effetti cinematografici, la ricerca di petrolio, l’analisi modellistica molecolare ecc. Sono dotati di sistemi operativi dedicati. Il modello di Supercomputer che si è imposto sul mercato è quello Cray Inc. fondata nel 1970
da Seymour Cray. Attualmente ci sono molti tipi di supercomputer e il
progetto TOP500 fornisce una lista aggiornata dei 500 più potenti supercomputer del pianeta.
Osservazioni Velocità processore
Miliardi di MIPS.
Utenti alla volta
Anche migliaia di persone, in ambienti di rete di grandi dimensioni
Dimensione
Richiedono attrezzature particolari e aria condizionata industriale
Facilità d’uso
Solo per gli specialisti
Clienti abituali
Maggiori centri di ricerca
Impatto sociale
Quasi a zero
Computer esistenti
Meno di mille in tutto il mondo
Costo
Decine di milioni di euro ciascuno
Mainframe – Sono costituiti da un’unità centrale che consente di servire
più utenti contemporaneamente (fino ad alcune migliaia). La maggior parte dei computer mainframe ha la capacità di ospitare più sistemi operativi. I
mainframe sono computer di notevoli dimensioni (per esempio un grosso
armadio) e spesso sono dotati di sistemi operativi dedicati. Sono utilizzati
60
4 Computer
per gestire grosse quantità di dati e sono quindi impiegati da grandi aziende, banche, enti pubblici, laddove l’aspetto predominante dell’elaborazione
non è la potenza di calcolo ma l’affidabilità e la capacità di memorizzare enormi quantità di dati. La differenza sostanziale tra Supercomputer e
Mainframe è propria questa: il Supercomputer è in grado di risolvere complessi calcoli matematici in tempi brevi, mentre il Mainframe è specializzato nella gestione di enormi quantità di dati, che devono essere memorizzati
e sui quali devono essere fatte numerose operazioni di ricerca, ma che non
necessitano di calcoli matematici complessi. Sono sistemi general-purpose.
Osservazioni Velocità processore
Milioni di MIPS
Utenti alla volta
Centinaia
Dimensione
Richiedono attrezzature particolari e aria condizionata
Facilità d’uso
Specialisti
Clienti abituali
Grandi aziende e governi
Impatto sociale
Molto alto, anche se inosservata, la moderna società industriale
non può funzionare senza di loro
Computer esistenti
Migliaia in tutto il mondo
Costo
Centinaia di migliaia di euro o più
2 Classificazione delle tipologie di computer
61
Minicomputer – Sono costituiti da un’unità centrale che consente di servire più utenti contemporaneamente (fino a qualche centinaio) ma con
prestazioni e costi inferiori a quelli dei mainframe: si può dire semplificando, che il minicomputer è una versione ridotta, anche nelle dimensioni,
del mainframe. Dotati inizialmente di sistemi operativi dedicati, si sono
uniformati, nel corso degli anni, allo standard UNIX. Sono sistemi generalpurpose e possono essere definiti i predecessori dei moderni server (effettivamente alcuni minicomputer sono utilizzati proprio a questo scopo).
Osservazioni Velocità processore
Centinaia di migliaia di MIPS
Utenti alla volta
A decine o centinaia se utilizzato su una rete.
Dimensione
Ridotte, non ha sempre bisogno di attrezzature speciali.
Facilità d’uso
Specialisti
Clienti abituali
Università e imprese di medie dimensioni; possono funzionare
come server di rete
Impatto sociale
Molto alto, soprattutto in ambienti di rete di medie aziende
Computer esistenti
Centinaia di migliaia in tutto il mondo
Costo
Decine di migliaia di euro
Microcomputer – Sono la tipologia di computer destinati al grande pubblico, sono i più utilizzati e sono in generale conosciuti con il nome di PC.
Sono piccoli sistemi general-purpose basati un su unico microprocessore;
sono monoutente e non hanno bisogno di utenti esperti per il loro funzionamento. Ne fanno parte:
•Desktop Personal Computer
•Workstation
•Network Computer
•Laptop o Notebook
•Tablet PC
•Netbook
62
4 Computer
•Palmari (Personal Digital Assistant PDA)
•Computer embedded
MIPS
MIPS (Million Instructions Per
Second, milioni d’istruzioni per
secondo) è l’unità di misura
che ci informa su quante operazioni una processore riesce
a eseguire in un secondo; è
quindi un indice di velocità.
Osservazioni Velocità processore
Migliaia di MIPS
Utenti alla volta
Uno
Dimensione
Piccolo
Facilità d’uso
Facile da usare.
Clienti abituali
Piccole imprese, uffici, scuole, privati
Impatto sociale
Alta nei paesi industrializzati
Computer esistenti
Centinaia di milioni in tutto il mondo
Costo
Da qualche centinaio a poche migliaia di euro
titolo
Dato che questo tipo di computer si è imposto sul mercato differenziandosi
nell’ampia gamma di prodotti sopraelencati, ne tratteremo in maniera più
approfondita nel paragrafo successivo.
Un’unità di misura utilizzata
per calcolare la velocità dei
supercomputer è il FLOPS
(FLoating point Operations Per
Second); esprime il numero di
calcoli in virgola mobile effettuati al secondo da un microprocessore.
2.1
Sintesi
Tipologia
Velocità
Supercomputer
dell’ordine di miliardi di MIPS
Un’intera stanza
Dimensioni
Decine di milioni di euro
Costo
Multi-utente
Utenti
Mainframe
dell’ordine di milioni di MIPS
Un grosso armadio
Da qualche centinaio di
migliaia a qualche milione
di euro
Migliaia di utenti
Minicomputer
dell’ordine di centinaia di migliaia di MIPS
Un piccolo frigorifero
Da qualche decina a qualche centinaio di migliaia di
euro
Centinaia di utenti
Microcomputer
dell’ordine di migliaia di MIPS
Dal desktop all’handheld (palmare)
Da qualche centinaio a
qualche migliaio di euro
Mono utente
Il
PC come paradigma del computer
3
Il personal computer nasce con la creazione dei microprocessori alla fine
degli anni ’70 del secondo millennio. Il termine deriva dal nome che nel
1981 l’IBM scelse per il suo primo Personal Computer (PC IBM), che divenne una sorta di computer ideale per l’uso «personale»: da qui il termine
PC. Per molto tempo poi, tutti i modelli prodotti da altre case furono chiamati «PC IBM compatibili» e anche altri tipi di microcomputer, come per
esempio Macintosh, pur non essendo compatibili con IBM vennero indicati
con il termine «PC». La sua architettura interna, che abbiamo illustrato in
precedenza e che deriva dallo schema di von Neumann, si è quindi imposta
come paradigma del computer, diventando nel corso degli anni il modello
di riferimento per l’ampia gamma di prodotti oggi in commercio che hanno permesso il diffondersi della cosi detta «informatica distribuita».
3 Il PC come paradigma del computer
63
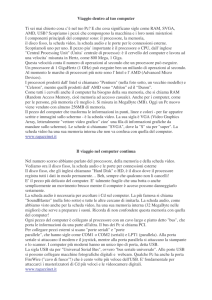
Desktop Personal Computer: è il computer più diffuso; monoutente non
ha bisogno di un utente esperto per il suo funzionamento. Composto di
un «case» che racchiude una scheda madre e che permette di collegare le
diverse periferiche. Tipico esempio di computer desktop è quello costituito
dai seguenti componenti base:
•«case» o «chassis» o «cabinet»
•microprocessore o processore
•memoria primaria o centrale
•scheda madre o «motherboard»
•memorie periferiche (hard-disk, DVD ecc.)
•unità di I/O (video, tastiera ecc.)
Osservazione Ci sono molti tipi di PC desktop in commercio che si
differenziano per il tipo di case (tower, barebone ecc.) ma soprattutto per
la componentistica elettronica installata, che esamineremo nel dettaglio
nei capitoli successivi. Qui ci limitano a evidenziare come installare una
diversa scheda madre, un diverso tipo di microprocessore, una diversa
quantità di memoria RAM e/o dispositivi periferici più o meno evoluti,
influenza in maniera determinante le prestazioni del PC.
Figura 3
Personal computer desktop.
Workstation: è il più potente tra i personal computer ed è utilizzato per
produrre lavori ad alto profilo professionale come disegni tecnici o artistici
(CAD) e grafica di alto livello (3D). Un PC di classe workstation deve avere
le seguenti caratteristiche:
•un maggior quantità di memoria centrale
•microprocessori multipli
•esecuzione affidabile del sistema operativo per funzionalità avanzate
•elevate prestazioni della scheda grafica con processore dedicato
64
4 Computer
Laptop o Notebook: è un computer che integra tutti gli elementi di cui ha
bisogno per funzionare, compreso schermo e tastiera, in un case di dimensioni ridotte (di media 360 3 40 3 270) e per questo motivo che in italiano
viene anche chiamato «computer portatile». Ha raggiunto capacità di elaborazione e di memorizzazione simili a quelle dei computer fissi, comprese
le funzioni multimediali di ultima generazione (trattamento d’immagini
3D, ecc.). Uno svantaggio rimane quello che essendo il suo ingombro ridotto, la maggior parte dei componenti sono integrati e non possono quindi essere cambiati, rendendo molto difficile l’upgrade hardware.
Upgrade
Upgrade: aggiornamento e/o
potenziamento di un componente hardware o software.
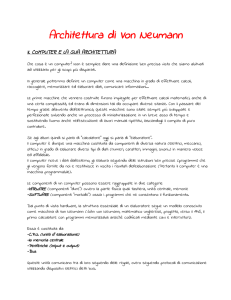
Network Computer (client): è un computer desktop a basso costo, che funziona grazie a un server cui è collegato e dal quale preleva le risorse necessarie
per poi elaborarle in locale; le sue funzionalità locali (hard disk, software locale ecc.) sono quindi molto limitate. L’idea di base è che gli utenti che sono
connessi a una rete non hanno bisogno di tutta la potenza di un personal
computer perché possono contare sulla potenza del server di rete.
Osservazione Il progresso tecnologico/organizzativo ha riportato in
auge un’organizzazione dei sistemi di elaborazione simile a quella degli
anni ’70-’80, quando le preziosissime e costosissime risorse di calcolo dei
mainframe andavano sfruttate in pieno e condivise fra numerosi utenti.
Estremizzando il modello client/server si è arrivati a riproporre un’organizzazione nella quale su un nucleo di elaborazione centralizzato si svolge
l’intera attività informatica aziendale: i client (detti thin client) tornano a
essere dei semplici terminali destinati alla sola visualizzazione e immissione dei dati. I terminali thin client necessitano solo di un video, una tastiera,
un mouse e un sistema per collegarsi al server. Dato che la tecnologia non
rende obsoleti questi dispositivi con lo stesso ritmo dei microprocessori e
della memoria, la vita utile dei thin client è notevolmente superiore rispetto a un elaboratore tradizionale; inoltre nei thin client non sono presenti
alcuni fra i componenti più delicati dei PC come per esempio l’hard disk.
Guasti e malfunzionamenti sono quindi assai più rari e i tempi d’inattività
per la manutenzione dell’hardware quasi inesistenti.
Figura 4
Thin client.
3 Il PC come paradigma del computer
65
Netbook: è una categoria di computer di dimensioni e costi ridotti rispetto a
un laptop ma che offrono una maggiore mobilità e autonomia di funzionamento. È utilizzato principalmente per navigare in Internet ed eseguire funzioni di base come videoscrittura e foglio elettronico. Il termine fu coniato nel
1999 dalla società britannica Psion per indicare una vasta gamma di computer
portatili e poi reintrodotto, con il suo significato attuale, da Intel nel 2008.
Tablet PC: letteralmente «PC tavoletta» è un computer portatile di solito più
piccolo di un notebook, ma più grande di un PDA con cui è possibile interagire attraverso uno schermo touch o multitouch. Il termine nasce nel 2001,
coniato da Microsoft per il suo Tablet PC. Ci sono diversi tipi di tablet: alcuni,
come l’iPad, hanno la componentistica elettronica integrata nell’unità touch
screen senza la presenza di una tastiera hardware, mentre altri, definiti anche
notebook convertibili o ibridi, sono simili a un normale notebook ma con un
display estraibile che può funzionare in modo indipendente. Normalmente
hanno una presa HDMI per connettere il tablet a un televisore o a un monitor.
Figura 5
Laptop, tablet PC e PDA.
Palmari (Personal Digital Assistant – PDA): letteralmente «assistente digitale personale» è un computer tascabile composto di processore, memoria
centrale, schermo touch e alcune funzionalità di rete racchiuse in un case
estremamente compatto con dimensioni ridottissime (handheld). I PDA
sono dotati di strumenti di office automation semplificati per trattamento
di testo e per la gestione di fogli di calcolo e di visualizzatori per un gran
numero di formati di file compresi quelli multimediali (PDF, JPEG4, mp3,
Flash ecc.). Sono anche utilizzati per la geo-localizzazione, la cartografia e
la navigazione stradale potendo integrare un dispositivo GPS (Global Positioning System). Sono dotati di sistemi operativi «dedicati» con funzionalità che si adattano alle caratteristiche di questo tipo di computer.
Osservazione Handheld
Handheld: letteralmente «a
mano», da qui l’uso del termine Palmare per riferirsi ai PDA.
66
Gli SmartPhone sono l’evoluzione dei palmari ai quali
aggiungono la possibilità di accedere alla rete di telecomunicazioni (funzionalità telefono). Il tipo d’interfaccia e tastiera disponibile influenza
l’utilizzo di uno smartphone rispetto a un altro: solitamente i terminali
dotati di tastiera completa (detta qwerty) consentono di scrivere abbastanza comodamente testi di una certa lunghezza, mentre lo schermo touchscreen garantisce un controllo del telefono in modalità PDA molto veloce.
4 Computer
Rugged computer. Il rugged computer (computer robusto) è un computer
specificamente progettato per funzionare in modo affidabile in ambienti e
condizioni difficili, quali forti vibrazioni, temperature estreme, ambienti
umidi o polverosi: la sua particolare progettazione non è solo nel corpo
esterno, ma anche per la scelta dei componenti interni. Sono utilizzati in
campo militare, sulle piattaforme petrolifere, nelle industrie chimiche, nella protezione civile, nei cantieri edili per gallerie, metropolitane, ecc.
Computer embedded: sono piccoli «computer incorporati» in altri dispositivi invece di essere stand-alone (autonomi). I sistemi embedded contengono nuclei di elaborazione che sono in genere microcontrollori. Sono
progettati per eseguire una o poche specifiche funzioni e rientrato quindi
nella categoria dei computer «dedicati». Gli esempi includono fotocamere
digitali, telefoni cellulari, lettori musicali, hardware (come l’hardware di
rete) e quasi ogni tipo di sistema di controllo industriale o domestico come
i sistemi di navigazione, i sistemi di frenata delle auto, le lavatrici ecc.
Osservazione I microcontrollori sono la forma più diffusa e più invisibile di computer. Sono dispositivi che raggruppano su un unico chip
processore, memoria, porte I/O, timers e contatori, porte di comunicazione seriale e convertitori A/D. La loro capacità di calcolo è molto limitata e di solito eseguono sempre lo stesso programma o una piccola gamma di programmi predefiniti, sono cioè computer «special purpose».
Figura 6
Sistema Server/client.
Per completare il panorama dei PC
dobbiamo parlare di una tipologia
di computer sviluppatasi in maniera
esponenziale nell’ultimo decennio e
che pur appartenendo alla categoria
dei microcomputer non è però monoutente: il Server. Si tratta di un
personal computer di elevate prestazioni, collegato in rete e condiviso da
utenti multipli (client). Esso raccoglie
e mette a disposizione i programmi e i
dati che sono condivisi dai client. Può
essere destinato a svolgere uno o più
3 Il PC come paradigma del computer
67
servizi quali per esempio scambiare e condividere files (file server), ospitare siti web (web server), gestire la posta elettronica (mail server), gestire
periferiche (per esempio stampanti - print server) od occuparsi del backup
dei dati (server raid). Tutte questi compiti possono essere gestiti da un solo
computer o possono essere suddivise tra più macchine, ognuna dedicata
a uno solo dei servizi descritti. Tratteremo in maniera approfondita tutti
questi aspetti nel capitolo dedicato alle reti.
3.1
Soluzioni e ipotesi di applicazione
Per progettare un sistema informatico (sia esso costituito da un solo PC
o da una rete più o meno complessa di computer) bisogna effettuatare
un’attenta analisi delle attività svolte dagli utenti, come per esempio: tipo
di applicazioni da utilizzare, necessità di programmi con dati centralizzati
su un singolo computer, presenza o meno di personale tecnico dedicato
all’ifrastuttura ICT, necessità di mobiltà e qualsiasi altro fattore che possa
influenzare la scelta del sistema. Fattore determinante, in tutti i casi dove
l’utilizzo del computer è dedicato al supporto di attività produttive, è la
garanzia dell’integrità dei dati: bisognarà quindi sempre prevedere un sistema di backup oppure un configurazione degli hard disk in RAID (vedi
nei capitoli successivi); adottare entrambe le soluzioni sarebbe la scelta
ottimale. È preferibile inoltre prevedere sempre la presenza di unita UPS
– Uninterruptible Power Supply (gruppo di continuità), poichè in caso di
mancanza di energia elettrica e/o sbalzi di tensione si possono avere gravi
conseguenze sul funzionamento dell’hardware.
Nelle ipotesi che presenteremo, sarà sempre presa in considerazione la presenza
di una connessione di rete sia essa locale (rete LAN) o a Internet, questo perché
è da considerasi ormai una risorsa irrinunciabile, un vero e proprio strumento
di comunicazione e iterazione con i diversi iterlocutori con i quali si opera.
Per piccole attività commerciali e comunque in tutte quelle situazioni in
cui quasi sempre si necessita esclusivamente della disponibilità di una o
due postazioni per la memorizzazione di dati come giacenza di magazzino,
schede clienti, ecc. la scelta indicata è un Desktop Personal Computer con
capacità medie, quindi con processori «entry level» (modello economico), al
massimo 4GB di RAM, HDD da 320 GB, lettore DVD, da 4 a 8 porte USB
e periferiche, come la scheda video e scheda di rete, integrate nel sistema.
Ecco un esempio di configurazione un PC di questo tipo:
68
Struttura
Desktop slim
Colore
––––––––––––––––
Processore
Intel Pentium Dual-Core E5700 3.0GHz
Memoria Base
4GB
Memoria max.
4GB
Alloggiamenti RAM
(totali - disponibilità)
2–0
4 Computer
Frequenza memorie
DDR3 800 MHz SDRAM
Hard Disk
500 GB
Tipo disco fisso
7200RPM SATA-II
Scheda grafica
Intel® Graphics Media Accelerator X4500 (Intel® GMA X4500) integrata, Supporto sceda grafica PCI Express® 1.1 3 16
Unità Ottiche
DVD SuperMulti Double Layer
Dispositivi
Tastiera e Mouse PS/2
Alloggiamenti
e
comparti totali (disponibili)
1 alloggiamento 5.25’’
1 alloggiamento 3.5’’interno
Scheda di rete
LAN: Gigabit Ethernet
Scheda di Rete
10/100/1000 Mbit/s
Porte di espansione
Frontali: 3x porte USB 2.0, ingressi High-Definition per cuffie e microfono
Retro: 6x porte USB 2.0, 2x porte PS/2, 1x porta VGA, 1x porta
Ethernet (RJ-45), 1x porta seriale, 3x ingressi audio
Lettore Multi-in-1 card
Dimensioni
101.5 (L) x 396.84 (P) x 266.5 (A) mm
Per studi di professionisti, non grafici, e in strutture dove la presenza delle
postazioni è comunque inferiore alle 10 unità è ancora consigliabile un Desktop PC con capacità medie, come quelle precedentemente illustrate. Si
consiglia però l’aggiunta di un Desktop Personal Computer con capacità
elevate, dove installare eventuali applicativi accessibili dalle altre postazioni; un computer con tali caratteristiche deve prevedere almeno un processore multi-core, 8GB di RAM, HDD da 500GB con sistema RAID, lettore
DVD, da 4 a 8 porte USB e periferiche, come la scheda video e scheda di
rete, integrate nel sistema.
Esempio di configurazione di un PC di questo tipo:
Processore
Intel QC i7-2600 3.4GHz
Numero di Processori Istallati
1
Memoria RAM Base
8GB (2 3 4GB)
Memoria RAM max.
32 GB
Disco fisso
2 3 500 GB
Controller
Serial ATA on board con RAID 0/1, 2
Case
MicroTower
Unità Ottiche
DVD SuperMulti Double Layer Serial ATA
Dispositivi
MultiCard Reader 20 in1, Audio: line-in 1, Audio: line-in / microphone 1, Audio: line-out 1,
Front audio: microphone 1, Front audio: headphone 1
USB 2.0 total 14, USB front 4, USB rear 8, USB internal 2
VGA 1 (via DVI to VGA adapter) , DVI 1
Mouse / Keyboard (PS/2) 2
Ethernet (RJ-45) 1
Schede Grafiche
Intel® Graphics Media Accelerator X4500 (Intel® GMA X4500) integrata
Supporto sceda grafica PCI Express® 1.1 3 16
3 Il PC come paradigma del computer
69
Slot
PCI-Express 2.0 3 16 1 3 (312 mm) full height
PCI-Express 2.0 3 4 (mech. x16) 1 3 (312 mm) full height
PCI-Express x1 1 3 (312 mm) full height
PCI (32-bit / 33 MHz) 1 3 (170 mm) full height
Baie da 3,5 (accessibili/non accessibili)
3.5-inch internal bays 2
3.5-inch external bays 2
2.5-inch internal bays 1
Baie da 5,25 (accessibili/non accessibili)
5.25-inch external bays 2
Alimentatore
Alimentatore da 300 W.
Peso
11 kg circa
Dimensioni
(W 3 D 3 H) 175 3 419 3 395 mm
Studi di architettura, agenzie pubblicitarie, studi di design e attività dove la
grafica riveste un ruolo primario, sono invece l’ambiente ideale per l’installazione di computer Workstation. Le cartteristiche di questi computer, che
possono essere più o meno performanti, devono prevedere uno o più processori multi-core, una notevole quantità di RAM (per esempio 16 GB) a
elevata velocità, la presenza di un HDD primario, possibilmente di tipo SSD
(vedi capitoli successivi), dove installare il sistema operativo e gli applicativi,
e di un HDD secondario per la conservazione dei dati con buone capacità di
storange e velocità di trasferimento elevata; deve inoltre prevedere la presenza di una o più schede video professionali con processori e RAM dedicati e
certificate CAD, di un lettore DVD, di un numero di porte USB compreso tra
8 e 16, di diverse porte I/O come eSATA, IEEE 1394, ecc. e di scheda di rete di
tipo Fast Ethernet (velocità di trasmissione di 1 GB). In questi sistemi infine
anche il case riveste un ruolo importante: deve infatti permettere una buona
areazione del sistema per evitarne il surriscaldamento.
Esempio di configurazione di un PC Workstation:
70
Processore
Intel QC i7-2600 3.4GHz
Numero di Processori Istallati
1
Memoria RAM Base
16GB (2 3 4GB)
Memoria RAM max.
32 GB
Disco fisso
1T SATAII+128GB SSD
Controller
Serial ATA on board con RAID 0/1, 2
Case
FullTower
Unità Ottiche
DVD SuperMulti Double Layer Serial ATA
Dispositivi
MultiCard Reader 20in1, Audio: line-in 1, Audio: line-in / microphone 1
Audio: line-out 1
Front audio: microphone 1, Front audio: headphone 1
USB 2.0 total 14, USB front 4, USB rear 8, USB internal 2
VGA 1 (via DVI to VGA adapter), DVI 1
eSATA 1
IEEE 1394
Mouse / Keyboard (PS/2) 2
Ethernet (RJ-45) 1 scheda di rete 10/100/1000
4 Computer
Schede Grafiche
NVIDIA Quadro 600 1024 MB
Schede Grafiche
NVIDIA Quadro
Slot
PCI-Express 2.0 3 16 1 3 (312 mm) full height
PCI-Express 2.0 3 4 (mech. x16) 1 3 (312 mm) full height
PCI-Express x1 1 3 (312 mm) full height
PCI (32-bit / 33 MHz) 1 3 (170 mm) full height
Baie da 3,5 (accessibili/non accessibili)
3.5-inch internal bays 2
3.5-inch external bays 2
2.5-inch internal bays 1
Baie da 5,25 (accessibili/non accessibili)
5.25-inch external bays 2
Alimentatore
Alimentatore da 450 W.
Peso
11 kg circa
Dimensioni
(W 3 D 3 H) 532 3 220 3 537 mm
In realtà quali istituti bancari, call center, ospedali, internet point e attività dove:
•il numero delle postazioni è rilevante
•la possibilità di ampliamento è notevole
•la necessità di avere sempre un veloce ripristino in caso di guasto riveste
un esigenza primaria
•il tipo di strumento ideale e quello che viene comunemente definito
Thin Client Server Computing, un sistema dove la memorizzazione
dei dati e l’esecuzione delle applicazioni è totalmente centralizzata sul
server e gli utenti hanno a disposizione postazioni di lavoro «leggere»;
ma tutto questo lo approfondiremo meglio quando tratteremo le reti di
computer.
I notebook, i netbook e i PDA trovano il loro naturale utilizzo a integrazione delle situazioni già illustrate come computer mobili che permettono
flessibilità e mobilità nelle attività lavorative. La scelta del modello e delle
dimensioni va eseguita, come già detto, soprattutto in base alle applicazioni che l’utente intende utilizzare; va inoltre considerata la possibilità che
questo strumento sia esclusivamente di supporto delle attività svolte normalmente in ufficio su altri personal computer (in questo caso si dovranno
prevedere attività di sincronizzazione dei dati), oppure sia, a tutti gli effetti,
una postazione mobile che deve coprire quindi tutte le esigenze dell’utente.
Osservazione Bisogna tenere conto che all’aumentare della richiesta
di performance del computer, aumenta anche la sua richiesta di energia
elettrica: questo spesso si traduce in una diminuzione dell’autonomia
delle batterie, specie se alla richiesta di elevate prestazioni si aggiunge
l’esigenza di limitare il peso del computer portatile.
Forniamo di seguito alcune configurazioni come esempio:
1.Un classico notebook per le attività di office automation, ma con caratteristiche che possono classificarlo come una postazione che sostituisce
un normale pc da tavolo:
3 Il PC come paradigma del computer
71
Processore
Intel Core i3-2310M 2.1 GHz
Memoria Base
4 GB
Frequenza memorie
4 GB DDR3 (1 3 4 GB)
Hard Disk
500 GB
Hard Disk
(caratteristiche)
SATA 5400 rpm
Cd/Dvd
DVD SuperMulti Double Layer
Dispositivi
Card Reader 4 in 1
Webcam 0.3 Mpixel
Schermo
15,6
Caratteristiche
Schermo
15.6 Pollici, 1366 3 768 Pixel, Glare, HD Ready, LED
Connettività
Lan-Wireless
Interfaccia di rete
WiFi 802.11n (b/g)
Lan 10/100/1000 Mbits
Interfacce
HDMI, VGA
1x USB 2.0, 1x USB 3.0
Ingresso Microphone, Uscita Cuffie
Chipset grafico
ATI Mobility Radeon™ HD 6470 1024 MB DDR3
Tecnologia batteria
Batteria 4 celle
Peso
2.60 Kg
Dimensioni
378 3 253 3 35.6 37.2 mm
2.Un tipico netbook, quando il principale utilizzo è rivolto agli applicativi
di base dell’office automation e alla navigazione su internet:
72
Processore
Intel Atom DC N570 1.66 GHz
Memoria Base
1 GB
Frequenza memorie
1 GB DDR3
Hard Disk
320 GB
Hard Disk
(caratteristiche)
320 GB HDD SATA
Cd/Dvd
Non Presente
Schermo
10,1
Caratteristiche
Schermo
Dimensione Schermo 10.1 Pollici
Risoluzione Schermo 1024 3 600 Pixel
Specifiche SchermoRetroilluminazione LED
Connettività
Lan-Wireless
Interfaccia di rete
Wireless
Interfacce
AudioAltoparlanti stereo
Audio I/O
Cuffie e microfono
Porte e Connettività
3x USB 2.0
Webcam
0.3 MPixel e microfono digitale
Card Reader
3 in 1
Chipset grafico
Intel® GMA 3150
Tecnologia batteria
6 celle
Peso
1.25 Kg
Dimensioni
262 3 178 3 25.9 36.5 mm
4 Computer
WiFi 802.11n (b/g), Lan
10/100 Mbits
3.Infine un tablet per chi vuole uno strumento versatile, leggero e maneggevole per poter leggere book elettronici, giornali e navigare su internet.
Processore
NVIDIA Tegra 250 1.00GHz
Memoria Base
1 GB
Memoria max.
MicroSD memory card up to 64G
Hard Disk
16 GB
Cd/Dvd
Non Presente
Dispositivi
Main camera: 5M Pixel Camera with Auto focus, Flash Light
Second camera: 2M Pixel Camera
Schermo
10,1
Caratteristiche
Schermo
10.1» WXGA LCM, 262K (1280*800)
16:10 / Brightness 350 nits / Color gamut 45%
· Contrast ratio 1500:1 / View angle 85/85/85/85
Connettività
Wireless-Bluetooth
Interfaccia di rete
Bluetooth® 2.1+EDR , 3.0 upgradable
Wi-Fi IEEE 802.11b/g/n
Interfacce
USB
· Micro USB 2.0 type B for Client
· USB 2.0
HDMI D-type
Tecnologia batteria
Rechargeable Lithium-ion polymer battery, 24.1W (3250mAh cell
, 2S1P)
Peso
700 g
Dimensioni
260 (L) 3 177 (W) 3 13.3 (H) mm
Sistema Operativo
Android 3.0 Honeycomb
Funzionalità
esclusive
Multi-Touch Screen
Si sono fin qui date delle indicazioni a proposito dell’utilizzo del PC in
ambito lavorativo ...e per le applicazioni HOME? Le esigenze di ognuno di
noi sono ovviamente diverse e le possibili soluzioni infinite; di seguito proponiamo due esempi di configurazioni adatte a un PC da utilizzare come
videogioco e a una stazione di home theatre (HTPC).
Esempio di configurazione di un PC per videogame:
Processore
Intel QC i7-2600 3.4GHz
Memoria RAM Base
8GB (4 3 2GB)
Memoria RAM max.
32 GB
Disco fisso
500GB SATAIII
Case
Full tower
Unità Ottiche
DVD SuperMulti Double Layer Serial ATA
Dispositivi
Multicard reader 20 in 1, Audio: line-in 1,Audio: line-in / microphone 1
Audio: line-out 1
Front audio: microphone 1, Front audio: headphone 1
USB 2.0 total 12, USB 3.0 total 2, USB front 4, USB rear 8, USB
internal 2
VGA 1 (via DVI to VGA adapter), DVI 1
Mouse / Keyboard (PS/2) 2
Ethernet (RJ-45) 1
eSATA 1 (optional)
3 Il PC come paradigma del computer
73
Schede Grafiche
NVIDIA GeForce GTX 590 – GDDR5 3GB
Scheda Audio
Xonar DX
Slot
PCI-Express 2.0 3 16 1 3 (312 mm) full height
PCI-Express 2.0 3 4 (mech. x16) 1 3 (312 mm) full height
PCI-Express x1 1 3 (312 mm) full height
PCI (32-bit / 33 MHz) 1 3 (170 mm) full height
Baie da 3,5 (accessibili/non accessibili)
3.5-inch internal bays 2
3.5-inch external bays 1
Baie da 5,25 (accessibili/non accessibili)
5.25-inch external bays 1
Alimentatore
Alimentatore da 450 W
Peso
15 Kg circa
Dimensioni
(W 3 D 3 H) 532 3 220 3 537 mm
Esempio di configurazione di un HTPC:
74
Processore
Intel Core i5-750 2.66 GHz
Memoria RAM Base
8GB (4 3 2GB)
Memoria RAM max.
32 GB
Disco fisso
500GB SATAIII
Case
Htpc – VF7001BNS
Unità Ottiche
DVD SuperMulti Double Layer Serial ATA
Dispositivi
Multicard reader 20 in 1, Audio: line-in 1, Audio: line-in / microphone 1
Audio: line-out 1
Front audio: microphone 1, Front audio: headphone 1
USB 2.0 total 12, USB 3.0 total 2, USB front 4, USB rear 8,USB
internal 2
VGA 1 (via DVI to VGA adapter), DVI 1
Mouse / Keyboard (PS/2) 2
Ethernet (RJ-45) 1
eSATA 1 (optional)
Interface Module notes Anytime USB charge functionality
IEEE 1394
Schede Grafiche e
Scheda Audio
Xonar HDAV1.3 Deluxe
Scheda TV
My Cinema-ES3-110/PTS/FM/AV/RC
Slot
PCI-Express 2.0 3 16 1 3 (312 mm) full height
PCI-Express 2.0 3 4 (mech. x16) 1 3 (312 mm) full height
PCI-Express x1 1 3 (312 mm) full height
PCI (32-bit / 33 MHz) 1 3 (170 mm) full height
Baie da 3,5 (accessibili/non accessibili)
3.5-inch internal bays 2
3.5-inch external bays 1
Baie da 5,25 (accessibili/non accessibili)
5.25-inch external bays 1
Alimentatore
Alimentatore da 450 W
Peso
10 Kg circa
Dimensioni
(W 3 D 3 H) 90 3 470 3 440 mm
4 Computer
4 L’architettura interna del PC
Come abbiamo già detto, ci si riferisce comunemente al personal computer come a un dispositivo costruito secondo l’architettura di von
Neumann: per architettura interna del PC s’intende quindi l’insieme
dei suoi blocchi interconnessi, ognuno dei quali costituisce un sottosistema logico del computer. In altre parole, con questo termine ci si
riferisce alla struttura e all’organizzazione dei suoi componenti hardware.
PTutti i componenti di base necessari per il funzionamento del computer si incontrano in un elemento chiamato scheda madre (in inglese
«motherboard» o «mainboard»), il vero cuore del computer!
Figura 7 pag. 46 testo Addomine/Pons
Figura 7
Si tratta di un complesso circuito stampato multistrato adibito all’installazione fisica dei componenti del PC, sul quale sono saldati una serie di
circuiti integrati (chip) e di connettori (slot). La scheda madre, una volta installati i componenti hardware provvede, tramite i bus e le porte di
Input/Output, a metterli in comunicazione tra di loro e a gestire tutte le
comunicazioni verso le periferiche esterne collegate.
Osservazione Un circuito stampato o PCB (Printed Circuit Board),
consiste in un supporto isolante su cui sono realizzate sottili strisce di
rame (piste) che connettono tra di loro i vari componenti: la faccia su
cui sono disposti i componenti viene chiamata lato componenti, mentre
la faccia opposta, su cui sono presenti le piste, viene chiamata lato rame.
Il circuito stampato delle schede madri è ricavato da un sandwich di
strati di vetronite e rame: generalmente una scheda madre può avere da
quattro a sei strati di rame.
4 L’architettura interna del PC
titolo
Circuito integrato (chip): circuito elettronico miniaturizzato
che si presenta come singolo
componente elettronico
titolo
Il circuito stampato costituisce il supporto meccanico più
utilizzato e più stabile per il
collegamento di componenti
elettronici
75
Esistono molti tipi di schede madri che si differenziano per molteplici caratteristiche, le principali delle quali sono:
•Il fattore forma o d’ingombro
•Il tipo di supporto del processore (socket)
•Il chipset ( set di dispositivi dedicati integrati nel sistema come Southbrige, Northbrige, ecc.)
•Il numero dei connettori di memoria RAM (detta anche memoria principale) e il loro funzionamento (es. dual chanell)
•Il chip del BIOS
•Il numero di slot dedicati alle periferiche interne (hard-disk, DVD ecc.)
e la loro tecnologia (SATA, SAS ecc.)
•Il numero e la tecnologia degli slot di espansione per schede dedicate
•Il numero e il tipo di connettori di entrata-uscita
Inoltre, le schede madri presentano generalmente un certo numero di componenti integrati, cioè montati direttamente sulla scheda, come:
•scheda di rete;
•scheda grafica;
•scheda audio;
Tali periferiche offrono caratteristiche e prestazioni limitate, ma possono
essere disabilitate attraverso il BIOS per aggiungere schede con prestazioni
maggiori.
Analizziamo ora le caratteristiche sopraelencate nel dettaglio:
1.Fattore di forma: è l’insieme delle caratteristiche strutturali come la dimensioni, la struttura fisica e la disposizione dei componenti integrati
in una scheda madre. Il fattore di forma determina la compatibilità di
una scheda madre con un case e soprattutto l’ubicazione delle varie periferiche, delle porte e di tutti gli altri componenti incluso l’alimentatore. Una cosa da tener ben presente è che il fattore di forma determina
sia la scelta sia del tipo di case, sia dell’alimentatore. Molti case vengono
venduti già provvisti di alimentatori: in questo caso occorre assicurarsi
che sia il case, sia l’alimentatore, siano compatibili con il fattore di forma
della scheda madre che si vuole montare.
L’ATX è il fattore di forma che prevale dalla fine degli anni ’90 ed è
quello usato dalla quasi totalità delle schede madri in commercio; è
caratterizzata da semplicità di utilizzo, facilità d’inserimento dei dispositivi input e output, flessibilità nell’integrazione di processori a
tecnologia più avanzata e da costi contenuti. Esistono delle varianti
con dimensioni ridotte, rispetto a quelle standard, per la realizzazioni
di particolari sistemi, come per esempio HTPC (Home Theatre PC).
Altro standard impiegato è il BTX, introdotto dalla Intel, un formato creato per apportare ulteriori miglioramenti nella disposizione dei
componenti, al fine di ottimizzare la circolazione dell’aria e ottenere
migliori risposte sia acustiche, sia termiche (minor rumore e minor
calore prodotti).
76
4 Computer
Tabella e schema che seguono riassumono le caratteristiche dei diversi
fattori di forma.
50
Fattore di forma
Dimensioni
ATX
305 mm 3 244 mm
microATX
244 mm 3 244 mm
FlexATX
229 mm 3 191 mm
Mini ATX
284 mm 3 208 mm
BTX
325 mm 3 267 mm
microBTX
264 mm 3 267 mm
picoBTX
203 mm 3 267 mm
Mini ITX
170 mm 3 170 mm
Nano ITX
120 mm 3 120 mm
100
150
200
250
300
350
400
50
PC/104
100
ETX/XTX
EPIC
NanoITX
150
EBX
DIN A5
MiniITX MiniDTX
FlexATX
200
250
DIN A4
DTX
MicroATX
PicoBTX
MicroBTX
NanoBTX
300
350
ATX
BTX
DIN A3
WTX
Figura 8
Fattori di forma.
2.Supporto del processore (socket embase)
Osservazione Prima di scegliere una scheda madre bisogna individuare il processore che si vuole utilizzare: la scelta del processore,
infatti, è preliminare alla selezione di tutti i componenti di un PC,
schede madre inclusa.
Il processore è collocato in un alloggiamento chiamato socket, che varia secondo il tipo e del costruttore del processore (Intel, AMD ecc.). Il
4 L’architettura interna del PC
77
socket è una basetta quadrata con un gran numero di piccoli connettori
sui quali il processore s’inserisce direttamente. I nuovi processori non
sono più dotati di piedini, ma di semplici punti di contatto piatti: i piedini in questo caso, sono presenti sul socket, dotato di una specie di gabbia che serve a bloccare in sede la CPU. In alcune schede madri, come
quelle dedicate per esempio ai computer di tipo Workstation e Server, è
possibile avere più socket per installare processori aggiuntivi.
3. Chipset
Con il termine chipset, s’indica un insieme di circuiti integrati (chip)
che svolgono una specifica funzione. Nei personal computer questo termine è utilizzato per indicare l’insieme di chip di una scheda madre che
si occupano di distribuire e coordinare le informazioni fra CPU, RAM e
periferiche d’input/output.
La qualità di un chipset dipende sia dalle funzionalità implementate, sia
dalla velocità, denominata larghezza di banda, con la quale trasferisce i
dati tra i dispositivi e la CPU: come nei processori, la velocità è misurata in MHz ed è un parametro legato all’architettura e alla tecnologia
implementata.
Nel corso degli anni, si è affermata una suddivisione del chipset in due
chip principali: un chip, denominato Northbridge (letteralmente ponte
Nord), dedicato alla comunicazione con i dispositivi veloci come il controller della memoria RAM e il controller per l’interfaccia grafica, e un
altro chip, denominato Southbridge (letteralmente ponte Sud), destinato alla comunicazione con tutti gli altri dispositivi di I/O.
Questa struttura è rappresentata graficamente come nella figura 9, disponendo la CPU in alto, il chip Northbridge, con le interfacce ad alta
velocità, sotto la CPU e a questa collegato attraverso il Front Side Bus
(FSB), e il chip Southbridge, con le interfacce di I/O, come ultimo elemento dell’architettura; questi due chip sono collegati tra loro da un
bus interno.
78
4 Computer
CPU
FSB
PCI
Expreess
x 16
RAM
Northbridge
Southbridge
PCI
USB
BIOS
SATA
Figura 9
Legacy
eSATA
Struttura del chipset.
Osservazione Questo tipo di architettura si è ulteriormente evoluta e, verso la fine del 2008, il controller della memoria RAM è stato spostato dal Northbridge direttamente all’interno della CPU, in
modo da ridurre al minimo i tempi di accesso. In alcuni casi anche
il Front Side Bus è stato sostituito con una evoluzione denominata
QuickPath Interconnect (QPI).
4.Connettori di memoria RAM:
Uno dei requisiti indispensabili di una buona scheda madre è quello di
permettere l’implementazione di quantità di memoria più alte possibili. La memoria RAM rappresenta il dispositivo in cui sono depositate le
funzionalità del sistema operativo, i programmi e i dati in uso, in modo
da potere essere facilmente raggiunti e prelevati dal processore per essere
elaborati. In questo senso, il primo pregio di una scheda madre è la quantità effettiva di memoria RAM che riesce a ospitare (l’unità di misura sui
moderni PC è il GB). Il secondo aspetto da tenere in considerazione è la
velocità, espressa in MHz, con cui questi dati possono essere prelevati e riversati: quest’ultimo fattore dipende principalmente dal tipo di memoria
4 L’architettura interna del PC
79
Modulo di memoria
Circuito stampato che contiene
i chip di memoria
impiegata. Recentemente è stata introdotta la tecnologia dual-channel,
che permette di incrementare ulteriormente la risposta delle memorie,
sfruttando una particolare modalità di accoppiamento dei moduli di memoria, che debbono essere equivalenti, e che consente di aumentare la
velocita di lettura e scrittura lavorando in parallelo sui due moduli.
5. Chip del BIOS
È il circuito integrato in cui risiede il BIOS (Basic Input/Output System).
Come vedremo meglio nei capitoli successivi, all’accensione del PC il processore a bisogno delle informazioni di base per eseguire il controllo iniziale
delle periferiche e dei componenti installati sulla scheda madre: tali informazioni risiedono nel BIOS. Avviate le routine di test delle funzioni hardware, dette POST (Power On Self Test), se non si verificano errori vengono
visualizzate sullo schermo alcune informazioni tra le quali la quantità di memoria del sistema e la tabella riassuntiva dei principali dispositivi connessi.
Il BIOS è accessibile, per identificare e correggere eventuali malfunzionamenti o per la manutenzione generale, solo al momento dell’accensione
del PC, di solito tenendo premuto il tasto «Canc o Del». Su schede madri
dove è presente un controller dei dischi avanzato, chiamato RAID (che
tratteremo in maniera dettagliata quando parleremo dei dischi del PC), è
previsto un ulteriore chip dove risiede il programma di gestione del sistema stesso, accessibile come il BIOS, al momento dell’avvio del computer.
Nella scelta di una scheda madre il tipo di BIOS installato non riveste
comunque un’importanza primaria, essendo le sue caratteristiche tecniche solo in parte opzionabili.
80
4 Computer
6. Slot dedicati alle periferiche interne (Hard-disk, DVD)
I dispositivi di archiviazione di massa come gli hard disk e i DVD, nei
PC sono connessi alla scheda madre mediante porte denominate SATA
(Serial Advanced Technology Attachment); nei computer di classe superiore come Workstation e Server possono essere presenti anche porte
di tipo SAS (Serial Attachment SCSI) più veloci e performanti. Queste
porte, che come abbiamo detto sono collegate direttamente al Southbridge, permettono il trasferimento dati a elevatissima velocità, aumentando quindi la rapidità di gestione dei dati da parte del processore. Più
numerose sono le porte di questo tipo, più dispositivi di archiviazione si
possono connettere. L’utilizzo del PC come dispositivo dove archiviare
grandi quantità di dati multimediali, per esempio nei casi di utilizzo di
applicazioni di grafica avanzata, di gestione audio o montaggio video,
può richiede infatti la presenza di un elevato numero di unità per la
memorizzazione dei dati.
7. I connettori di entrata-uscita e gli slot di espansione
Tutte le schede madri hanno un set di porte di I/O standard, ma si differenziano tra loro sia per il numero sia per la tipologia (porte USB, porte
FireWire ecc.). Una buona scheda madre, deve consentire inoltre l’aggiunta di nuove funzionalità attraverso schede dedicate e quindi avere
molteplici slot di espansione (tipo PCI express 1x; 4x; 8x; 16x.); tutto
questo verrà approfondito nel capitolo sui dispositivi di I/O.
Figura 10
Connettori PCI Express.
Come scegliere una scheda madre
Per scegliere in maniera corretta una scheda madre piuttosto che un’altra è
essenziale sapere a cosa sarà destinato il computer che vogliamo assemblare, quali applicazioni utilizzerà, dove sarà allocato:
1.Il fattore d’ingombro o formato scheda madre (strettamente legato al
tipo di case):
•Per computer utilizzati in ufficio o in un laboratorio scolastico, ovviamente non di grafica o design, è consigliato un case ridotto di tipo
«slim» facilmente posizionabile e con ingombro limitato. Di solito
questi case permettono di alloggiare schede madri di tipo Micro ATX.
•Per computer utilizzati come workstation (design, calcolo scientifico, progettazione tecnica ecc.) è preferibile un case di tipo «tower»,
4 L’architettura interna del PC
81
considerando la necessità di installare schede video o schede audio
dedicate, più hard disk e così via; questa scelta offrirà la possibilità di
ampliare il numero di dispositivi installati senza incorrere in problemi di spazio e permetterà inoltre una facile areazione, permettendo
eventualmente anche il montaggio di ventole aggiuntive (fondamentali se il computer deve svolgere grandi carichi di lavoro). Il formato
della scheda madre normalmente utilizzato è l’ATX.
•Per computer utilizzati come Home Theater PC è possibile scegliere
tra la vasta gamma di case offerti da diversi costruttori con design
accattivanti e molto simili, esteriormente, a impianti di tipo hi-fi. In
questo caso è fondamentale porre attenzione, prima di scegliere il
case, a cosa si vuole installare all’interno: ci si potrebbe ritrovare, per
esempio, con un case di design che ospita una scheda ATX, ma che
non è abbastanza alto per inserire una scheda video con prestazioni
elevate; i case in commercio possono alloggiare, di solito, quasi tutti i
formati disponibili (ATX, Micro ATX, ecc.)
Osservazione Il costo dei case varia da poche decine fino a qualche
centinaio di euro, in base al design e alle caratteristiche strutturali, come
facilità di accesso e di montaggio dei dispositivi interni; alcuni inoltre
sono quasi sprovvisti di viti poiché dotati di ingegnosi sistemi che facilitano l’assemblaggio. Si consideri che molti case di fascia media sono
sprovvisti di alimentatore che va acquistato separatamente. L’alimentatore non deve essere sottovalutato poiché si può rischiare, specialmente
nell’assemblaggio di workstation, di sottodimensionare la necessità di
potenza elettrica del computer: questo può essere causa di malfunzionamenti e instabilità del sistema. Nel caso di acquisto separato dell’alimentatore si consiglia di preferire un modello modulare, che consente
di connettere i cavi di alimentazione in base alle necessità e rendendo
l’assemblaggio più pulito e ordinato.
Home Theater PC
workstation
Case slim
82
4 Computer
Mini tower
2.Il tipo di supporto del processore (socket) è di fondamentale importanza
nella scheda madre poiché determina il processore che potremmo installare: è quindi prioritaria la scelta del processore, che illustreremo nel paragrafo successivo. Qui, ci limiteremo a fornire delle «linee guida» generali:
•Per computer utilizzati per l’ufficio, le aule didattiche e l’Home Theatre PC sarebbe meglio non orientarsi su processori di elevata potenza, poiché le attività alle quali è destinato il computer sono abbastanza elementari e ripetitive e quindi rischiamo di sotto- utilizzare
la potenza del processore.
•In caso di workstation (design, calcolo scientifico, progettazione tecnica ecc.) è invece opportuno orientarsi su processori più performanti.
Osservazione Una soluzione potrebbe essere quella di scegliere processori legati a una famiglia di socket, come avviene nella pratica e che offra
la possibilità di effettuare facilmente upgrade a versioni più performanti.
3.Il numero e la tipologia dei connettori di memoria RAM sono elementi
da non sottovalutare perché determinano in maniera particolarmente
incisiva sia le prestazioni sia la possibile evoluzione del sistema. La scelta
del tipo e della quantità di memoria interna sarà illustrata nel paragrafo
successivo: qui ci limiteremo a ribadire che è sempre consigliabile avere
la massima possibilità di espandere la quantità di memoria interna e che
è preferibile scegliere la tecnologia dual chanell, che permette di aumentare le prestazioni del sistema.
4.Il numero degli slot dedicati alle periferiche interne con tecnologia
SATA, permette di determinare quanti dispositivi interni come hard
disk e lettori DVD possono essere installati: molte porte SATA saranno
per esempio inutili su un sistema con case «slim» a causa del poco spazio presente, mentre per sistemi tipo workstation, con case full tower,
sarà importante avere la possibilità di aggiungere più di un hard disk.
Ricordiamo che nelle schede madri per workstation, è determinante la
presenza del controller RAID integrato, che permette la protezione dei
dati da possibili guasti, e la presenza di connessioni di tipo SAS.
5.Anche il numero e la tecnologia degli slot di espansione è poco influente
per i sistemi dedicati all’ufficio o alla scuola, mentre diventa un fattore
importante nei casi in cui sicuramente sarà necessario inserire schede
dedicate a specifiche funzioni come schede video, audio, per la ricezione
di canali TV, ecc.
6.I connettori di entrata-uscita sono invece un fattore importante in tutte
le configurazioni:
•nei casi di utilizzo per ufficio o attività scolastiche si privilegeranno
prioritariamente il numero delle porte USB per la loro versatilità e la
sicura necessità nel collegare periferiche esterne
4 L’architettura interna del PC
83
•in sistemi più professionali, si guarderà non solo al numero di porte
USB ma anche ad altre necessità specifiche come la porta Firewire
nel caso di Home Theatre PC o Workstation dedicate al montaggio
video oppure la presenza di connessioni eSATA.
Periferiche integrate direttamente sulla scheda madre, come scheda video,
scheda audio sono consigliabili per sistemi per ufficio o scolastici mentre potrebbero essere inutili in quei casi in cui sia indispensabile installare
schede più professionali. È ovvio infine, che non debba mai mancare sulla
scheda madre, una scheda di rete.
Vediamo ora due tipologie di schede madri, una dedicata al settore office o
scolastico e una seconda tipica per workstation:
Specifiche scheda madre per PC settore office
84
CPU
Intel® Socket 1155 for 2nd Generation Core™ i7/Core™ i5/Core™
i3 Processors
Supports Intel® 32 nm CPU
Supports Intel® Turbo Boost Technology 2.0
Chipset
Intel® H61(B3)
Memoria
2 x DIMM, Max. 16GB, DDR3 1333/1066 Hz Non-ECC, Un-buffered Memory
Dual Channel Memory Architecture
* The maximum 16GB memory capacity can be supported with
8GB or above DIMMs. ASUS will update the memory QVL once the
DIMMs are available in the market.
* Refer to user manual for the Memory QVL (Qualified Vendors
Lists).
* Due to OS limitation, when installing total memory of 4GB capacity
or more, Windows® 32-bit operation system may only recognize
less than 3GB. Install a 64-bit Windows® OS when you want to
install 4GB or more memory on the motherboard.
Grafica
Integrated Graphics Processor
Multi-VGA output support : DVI/RGB ports
– Supports DVI with max. resolution 1920 x 1200 @ 60 Hz
– Supports RGB with max. resolution 2048 x 1536 @ 75 Hz
Supports DirectX 10.1
Slot di Espansione
1 x PCIe 2.0 x16
2 x PCIe 2.0 x1
1 x PCI
Storage
Intel® H61(B3) chipset :
4 x SATA 3Gb/s port(s), blue
LAN
Realtek® 8111E , 1 x Gigabit LAN Controller(s)
Audio
Realtek® ALC 887 8-Channel High Definition Audio CODEC *1
Porte USB
Intel® H61(B3) chipset :
10 x USB 2.0 port(s) (6 at back panel, black, 4 at mid-board)
Porte I/O Posteriori
1 x PS/2 keyboard/mouse combo port(s)
1 x DVI
1 x D-Sub
1 x LAN (RJ45) port(s)
6 x USB 2.0
3 x Audio jack(s)
4 Computer
I/O Interne
2 x USB 2.0 connector(s) support(s) additional 4 USB 2.0 port(s)
1 x COM port(s) connector(s)
4 x SATA 3Gb/s connector(s)
1 x CPU Fan connector(s)
1 x Chassis Fan connector(s)
1 x S/PDIF out header(s)
1 x 24-pin EATX Power connector(s)
1 x 4-pin ATX 12V Power connector(s)
1 x parallel port connector(s)
1 x Front panel audio connector(s) (AAFP)
1 x System panel(s)
Accessori
User’s manual
I/O Shield
2 x SATA 3Gb/s cable(s)
BIOS
32 Mb Flash ROM EFI BIOS, PnP, DMI v2.0, WfM 2.0, ACPI v2.0a,
SM BIOS v2.6, Multi-language BIOS
Dimensioni Scheda
microATX Form Factor
9.6 inch 3 8.0 inch ( 24.4 cm 3 20.3 cm )
Specifiche scheda madre per PC workstation
CPU
Intel Socket 1366 Core™ i7 Processor Extreme Edition/Core™ i7
Processor Supports Intel® Dynamic Speed Technology
Chipset
X58 + ICH10R Nvidia® nForce200
test
Up to 6400 ; Intel® QuickPath Interconnect MT/s
Memoria
6 x DIMM, 24 GB, DDR3 1600*/2000(O.C.)*/1866(O.C.)*/1800(O
.C.)*/1333/1066 ECC,Non-ECC,Un-buffered Memory
Triple channel memory architecture
Support Intel Extreme Memory Profile (XMP)
*Hyper DIMM (DDR3 1800MHz or above) support is subject to the
physical characteristics of individual CPUs.
**Refer to user manual for the Memory QVL (Qualified Vendor
Lists.)
*** ECC memory support requires Intel® Nehalem-WS 1S W3500
series or Nehalem-EP E5502/E5504/E5506 processors
Slot di Espansione
x PCIe 2.0 x16 slots (at x16 or x8 mode)
2 1 x PCIe 2.0 x16 slots (at x16 mode)
2 x PCIe 2.0 x16 slots (at x8 mode)
1 x PCIe 2.0 x16 slot (at x4 mode)
* True @ x16 3-Way SLI™ in slots 1, 3 and 5 when slots 2 and 4
are not occupied
Multi-GPU Support
Supports NVIDIA 2-Way and 3-Way SLITM techonology
Supports ATI CrossFireXTM technology, up to Quad CrossFireXTM
Storage
* A SAS expander (excluded in package) is required while using
RAID 10 on SAS ports.
** A port-multiplier (excluded in package) is required while using
RAID 5 or 10 on eSATA ports. Intel ICH10R controller
Marvell 88SE6320 SAS controller
2 x SAS ports supporting SAS RAID 0, 1, 10*
6 xSATA 3 Gb/s ports Intel® Matrix Storage supporting SATA RAID
0, 1, 10, and 5
External SATA 150/300 (SATA On-the-G0), supporting SATA RAID
0, 1, 10, and 5**
2 x Marvell 88SE6121 SATA controller
4 L’architettura interna del PC
85
86
LAN
Support Teaming Technology 2 x Realtek 8111C Dual Gb LAN
Audio
ADI 2000B, 8 -Channel High Definition Audio CODEC
Multi-Streaming
Jack-Sensing
Front Panel Jack-Retasking
Coaxial / Optical S/PDIF out ports at back I/O
ASUS Noise-Filer
USB
USB 2.0 ports 12
Caratteristiche
Speciali
EPU - 6 Engine
True 16+2 Phase Power Design
Turbo V
Fan Xpert
Express Gate
AI Nap
Q-Shield
Q-Connector
Fanless Design: Heat-pipe solution
Fanless Design: Stack Cool 2
My Logo 2
CrashFree BIOS 3
EZ Flash 2
C.P.R.(CPU Parameter Recall)
SFS (Stepless Frequency Selection)
O.C. Profile
Porte I/O Pannello
Posteriore
x PS/2 Keyboard
1 x PS/2 Mouse
1 x External SATA
2 (Coaxial + Optical)
x S/PDIF Out 1 x RJ45 port
2 x USB 2.0/1.1
6 Channel Audio I/O
8
Connettori I/O
Interni
24-pin EATX Power connector
8-pin ATX +12V Power connector
Chassis intrusion
CPU fan with PWM control
Chassis fan1 with Q-fan control
Chassis fan2 with Q-fan control
Chassis fan3 with Q-fan control
PWR fan
CD audio in
3 x USB connectors support additional 6 USB ports
20-pin Panel connector
TPM header
Front panel connector
S/PDIF Out header
BIOS
16 Mb Flash ROM
AMI BIOS, Green, PnP, DMI v2.0, Wfm2.0, ACPI v2.0a, SMBIOS
v 2.4
Gestibilità
WOR by Ring,WOL/WOR by PME,Chasis Intrusion,AI NET2
Dimensioni
ATX Form Factor
12 inch x 9.6 inch 30.5 cm x 24.5 cm )
4 Computer
5 Caratteristiche dei processori e
delle memorie del PC
5.1
Caratteristiche dei processori
Il processore o microprocessore (CPU – Central Processing Unit – letteralmente Unità Centrale di Elaborazione) è il cervello del computer. Esso
permette di manipolare le informazioni codificate sotto forma binaria e di
eseguire le istruzioni registrate nella memoria.
La storia dei processori è inseparabilmente legata all’azienda Intel che ha
realizzo il primo processore nel 1971 (Intel 4004) e in seguito, nel 1981, il
processore 8086 che ha equipaggiato i primi PC.
Osservazione Intel è il maggiore produttore mondiale di processori,
ma sono abbastanza diffuse anche le CPU prodotte dalla AMD che sono
compatibili con quelle della Intel. Altri storici processori prodotti sono
stati lo Zilog Z80 e il Motorola 68000. Di seguito elenchiamo le principali famiglie di processori:
–80 3 86: la «x» rappresenta la famiglia. Si parla quindi di 386, 486, 586,
686, ecc.
–ARM
–IA-64
–MIPS
–Motorola 6800
–PowerPC
–SPARC
Un processore è costituito da un core (nucleo), contenente milioni di transistor che costituiscono la parte funzionale della CPU, inserito in un package (imballaggio) di ceramica.
Con il termine tecnologia costruttiva, s’intende la grandezza in micron
(10–3 millimetri) dei transistor presenti all’interno della CPU; questa grandezza è in costante diminuzione e comporta il parallelo incremento del
numero di transitor contenuti nel processore con i seguenti vantaggi:
•maggiore velocità della CPU;
•minore dissipazione di energia;
•minore tensione di lavoro;
•minore consumo di energia;
•minore surriscaldamento.
Osservazione A questo proposito è interessante ricordare la legge di
Moore, ideata nel 1965 da Gordon Moore, che tre anni dopo sarebbe stato
uno dei fondatori della Intel; si tratta di una legge empirica che nella sua
prima versione afferma: «il numero dei transistor in un processore raddoppia ogni 12 mesi». Questa legge si è dimostrata sostanzialmente corretta, anche se venti anni dopo è stata leggermente rivista assumendo la
seguente forma: «le prestazioni dei processori raddoppiano ogni 18 mesi».
5 Caratteristiche dei processori e delle memorie del PC
Transistor
Un Transistor (contrazione di
transfer resistor) è un componente elettronico semi-conduttore con tre elettrodi capaci
di modificare la corrente che li
attraversa. Questi componenti
sono definiti «componenti attivi».
87
La CPU si può cosi suddividere:
•Unità di controllo (CU) e di predizione delle istruzioni;
•Unità Aritmetico Logica (ALU) alla quale spesso è affiancata l’unità per
i calcoli in virgola mobile o FPU (Floating Point Unit), che ne potenzia
le capacità di calcolo;
•Memoria locale, costituita dall’insieme dei registri;
•Memoria cache di primo livello o L1;
•Interfaccia di collegamento con l’esterno o FSB (Front Side Bus).
Chache L2
A
L
U
FPU
REGISTRI
Cache L1 Dati
Cache I1 istruzioni
Unità
di
controllo
Unità di gestione I/O
Modern multicore CPUFigura 11
Le parti della CPU.
Osservazione Viene chiamata memoria cache (dal francese «caché» – nascosta), una memoria temporanea utilizzata per memorizzare dati che possono successivamente essere recuperati velocemente;
la memoria cache e il suo utilizzo sono trasparenti al programmatore,
quindi «nascosta». Cache L1, è una memoria molto veloce, integrata
nella CPU, che contribuisce ad aumentare le prestazioni del processore
permettendo di recuperare nel minor tempo possibile il dato richiesto.
Ogni dato, infatti, viene prima cercato nella cache: se è presente (hit)
viene inviato alla CPU, se non viene trovato (miss) viene recuperato
dalla memoria principale e memorizzato nella cache nel caso possa
servire successivamente. La maggior parte dei computer ha anche cache L2 e L3, che sono più lente di cache L1, ma comunque più veloci
della memoria RAM.
La funzione della cache multi-livello consiste nel contenere un maggior
numero di dati e/o istruzioni in modo da poter aumentare la velocità nel
ritrovamento dell’informazione richiesta dall’utente. Il dato, o l’istruzione, vengono cercati prima nel livello 1, poi nel livello 2 e infine nel livello
3: solo se nella cache non viene trovato il dato si passa alla ricerca nella
memoria centrale.
Cercheremo ora di illustrare le caratteristiche attraverso le quali sono classificati i processori, senza entrare nei dettagli dei vari modelli che si sono
via via succeduti, limitandoci a esporre quelle caratteristiche che risultano
essere salienti per la loro classificazione:
88
4 Computer
1. Frequenza di clock
Il processore esegue le istruzioni seguendo il ritmo scandito dalla frequenza del clock (l’orologio di sistema che invia gli impulsi). La frequenza del clock (detta anche ciclo) corrisponde al numero d’impulsi
inviati in un secondo ed è espressa in Hertz (Hz).
Fronte di Salita
CLK1
Fronte di Discesa
CLK2
CLK3
CLK4
Ciclo di Clock
Figura 12
esempio
Ciclo di clock.
Un computer a 2400 MHz ha un orologio che invia
2.400.000.000 impulsi al secondo. A ogni impulso
dell’orologio il processore esegue un’azione, corrispondente a un’istruzione o a una sua parte. L’indicatore chiamato CPI (Cicli Per Istruzione), rappresenta
il numero medio di cicli necessario all’esecuzione di
un’istruzione su un processore.
La potenza di un processore può quindi essere caratterizzata dal numero d’istruzioni che è capace di
trattare al secondo: l’unità utilizzata è il MIPS (Milioni
di Istruzioni al Secondo). Il valore massimo si è raggiunto nel 2005 con il Pentium IV Extreme Edition con
clock a 3,72 GHz, poi i produttori di CPU hanno cessato di spingere verso l’alto la frequenza del clock.
2. Ampiezza dei registri
Nel corso dell’evoluzione dei personal computer l’ampiezza dei registri,
espressa in bit, è via via aumentata e si è passati dai 4 bit del processore
4004, ai 16 bit dell’8086, ai 32 bit dei processori che vanno dal 80386 ai
Pentium IV, per arrivare ai 64 bit dei processori multicore. Quando si afferma che una CPU è «a x bit» s’intende proprio dire che l’ampiezza dei
suoi registri è x bit: una CPU a 64 bit ha quindi registri di tale dimensione.
3. Set d’istruzioni
È detto set di istruzioni l’insieme delle operazioni elementari che un
processore può compiere. Il set d’istruzioni di un processore determina la sua architettura. L’unità di controllo della CPU permette l’esecuzione delle istruzioni in linguaggio macchina, tramite una sequenza di
micro-operazioni eseguite direttamente dall’hardware e che generano,
nella giusta sequenza, i segnali di controllo che provocano l’esecuzione
di ogni operazione elementare. Per la sua implementazione si utilizzano
due diverse metodologie:
a.Implementazione microprogrammata: a ogni codice operativo si fa
corrispondere l’indirizzo d’inizio di un microprogramma.
b.Implementazione cablata o«hardwired»: i circuiti di controllo interpretano il codice operativo e inviano segnali per l’esecuzione
dell’operazione.
Architettura CISC
Nell’architettura CISC (Complex Instruction Set Computer, ossia «com-
5 Caratteristiche dei processori e delle memorie del PC
89
puter con set d’istruzioni complesso») l’unità di controllo è microprogrammata. Caratteristiche delle architetture CISC sono:
•Ampio numero di istruzioni macchina che consentono di eseguire
operazioni complesse;
•Istruzioni di lunghezza variabile;
•Formati d’istruzione differenti che rendono meno veloce la decodifica;
•Presenza di pochi registri e molte istruzioni che fanno riferimento
alla memoria;
•Flessibilità nella definizione delle istruzioni;
L’architettura CISC è usata in particolare per i processori di tipo x86.
Architettura RISC
Un processore che usa la tecnologia RISC (Reduced Instruction Set Computer, ossia «computer con set d’istruzioni ridotto»), ha invece l’unità di
controllo cablata. Tali architetture sono:
•Formate da un piccolo insieme di semplici istruzioni macchina;
•Ottimizzate da un numero elevato di registri generici e dall’adozione
di compilatori.
Cerchiamo di comprendere meglio la differenza tra le due architetture con
un esempio:
1
2
3
4
1
2
Memoria
Centrale
3
4
5
6
A
D
B
E
C
F
X/+–
Figura 13
Schema generico della
memoria di un computer.
90
4 Computer
Registri
Unità di
esecuzione
Ipotizziamo di voler moltiplicare due numeri in memoria. Il diagramma
rappresenta lo schema generico della memoria di un computer. La memoria principale è suddivisa in celle numerate dalla Riga1:Colonna1, alla
Riga6:Colonna4. L’unità di esecuzione è incaricata di eseguire tutti i calcoli.
Tuttavia, l’unità di esecuzione non può che operare su dati che sono stati
caricati in uno dei sei registri (A, B, C, D, E o F). Diciamo che vogliamo calcolare il prodotto di due numeri, uno memorizzato nella cella 1:1 e l’altro
memorizzato nella cella 6:4, e memorizzarne il risultato nella posizione 1:1.
L’approccio CISC
L’obiettivo primario dell’architettura CISC è completare l’operazione con
il minor numero di linee di codice. Per questa particolare attività, un processore CISC sarebbe stato costruito con una specifica istruzione (che chiameremo «PROD»). Quando è eseguita, questa istruzione carica i due valori
nei registri separati, moltiplica gli operandi in unità di esecuzione, e quindi
memorizza il prodotto in un apposita cella. Così, tutta l’opera di moltiplicare due numeri può essere completata con una sola istruzione:
PROD 1:1, 6:4
PROD è nota come «istruzione complessa». Opera direttamente sulle celle
di memoria del computer e non richiede, al programmatore, di chiamare
esplicitamente le funzioni di caricamento dei registri e di scrittura nella
memoria. Questa procedura ricorda da vicino un comando di un linguaggio ad alto livello. Per esempio, se lasciamo che «x» rappresenti il valore
contenuto nella cella 1:1 e «y» quello contenuto in 6:4, allora questo comando è identico a «x = x * y.»
Uno dei vantaggi principali di questo sistema è che il compilatore lavora
pochissimo per tradurre un’istruzione ad alto livello, in linguaggio macchina. La lunghezza del codice è ridotta e serve quindi poca RAM per conservare le istruzioni. L’attenzione è posta alla costruzione di istruzioni complesse direttamente attraverso l’hardware.
L’approccio RISC
I processori RISC utilizzano invece solo semplici istruzioni che possono essere eseguite all’interno di un ciclo di clock. Così, il comando «PROD» sopra descritto potrebbe essere diviso in tre comandi separati: «LOAD», che
sposta i dati dalla cella della memoria a un registro, «PROD», che calcola il
prodotto di due operandi presenti all’interno dei registri, e « STORE «, che
sposta i dati da un registro alla cella di memoria. Al fine di eseguire la serie
esatta di passi descritti nell’approccio CISC, un programmatore avrebbe
bisogno di quattro linee di codice macchina:
•LOAD A, 2:3
•LOAD B, 05:02
•PROD A, B
•STORE 2:3, A
Questo può sembrare un modo molto meno efficiente di eseguire l’operazione: ci sono più righe di codice ed è necessaria più RAM per memo-
5 Caratteristiche dei processori e delle memorie del PC
91
rizzare le istruzioni del codice macchina; inoltre il compilatore deve anche
svolgere più lavoro per convertire un’istruzione di linguaggio ad alto livello
in codice macchina.
Tuttavia, la strategia RISC porta anche alcuni vantaggi importanti:
•ogni istruzione richiede solo un ciclo di clock per l’esecuzione; l’intero
programma verrà eseguito in circa la stessa quantità di tempo del comando «PROD» eseguito in più cicli
•queste «istruzioni ridotte» richiedono meno spazio hardware per i transistor, rispetto alle istruzioni complesse, lasciando più spazio per i registri di uso generale
•tutte le istruzioni vengono eseguite in un lasso di tempo uniforme
•è possibile utilizzare il sistema pipelining (vedi avanti).
Separare le istruzioni «LOAD» e «STORE» riduce effettivamente la quantità di lavoro che il computer deve eseguire. Dopo che il comando «PROD» è
stato eseguito, con l’approccio CISC il processore cancella automaticamente i registri: se uno degli operandi deve essere utilizzato per un altro calcolo,
il processore deve ricaricare i dati dalla cella di memoria in un registro.
Nell’architettura RISC, l’operando rimarrà invece nel registro, fino a quando un altro valore non è caricato al suo posto.
ARCHITETTURA RISC
ARCHITETTURA CISC
•enfasi sul software;
•un ciclo di clock per ogni istruzione;
•istruzioni ridotte (solo da registro a registro);
•«LOAD» e «STORE» sono istruzioni indipendenti;
•grandi dimensioni del codice;
•ha bisogno di più transistor dedicati ai
registri di memoria.
•enfasi sull’hardware;
•più cicli di clock per una singola istruzione;
•istruzioni complesse (da memoria a memoria);
•«LOAD» e «STORE» incorporate nelle
istruzioni;
•dimensioni ridotte del codice;
•ha bisogno di più transistor dedicati alla
memorizzazione di istruzioni complesse.
Convergenza tra CISC e RISC
Con l’evoluzione tecnologica, alcuni miglioramenti sono stati utilizzati sia
dai processori RISC quanto dai CISC: i confini tra le due architetture hanno iniziato a confondersi. Per esempio, poiché le velocità dei processori
sono aumentate e i chip CISC sono ora in grado di eseguire più istruzioni
all’interno di uno stesso ciclo di clock, anche l’architettura CISC può far
uso della tecnologia pipeline. Inoltre, è possibile inserire molti più transistor su un singolo chip e questo dà ai processori RISC abbastanza spazio
da integrare operazioni più complesse, come comandi CISC. Tutti questi
fattori hanno portato alcuni gruppi a sostenere che siamo in un’era «postRISC», in cui i due stili sono talmente simili che distinguerli non è più
rilevante.
Miglioramenti tecnologici
Durante gli anni, i costruttori di microprocessori hanno messo a punto un
certo numero di miglioramenti che permettono di ottimizzare il funzionamento del processore:
92
4 Computer
1. La pipeline
La pipeline (letteralmente «conduttura») è una tecnologia che velocizza i tempi della CPU parallelizzando l’elaborazione di più istruzioni: questo consente
un aumento del numero di istruzioni eseguite, in una data quantità di tempo. Il termine in inglese è utilizzato anche per indicare le condutture che, se
si diramano a partire da un condotto principale, garantiscono l’arrivo a valle
di una maggiore quantità di liquido in una determinata quantità di tempo.
Un esempio può essere il seguente. Immaginiamo di suddividere il ciclo
di esecuzione di un’istruzione in più fasi:
•
•
•
•
Fetch dell’istruzione (FCI)
Decodifica dell’Istruzione (DCI)
Esecuzione dell’istruzione (EXI)
Memorizzazione dei dati (MD)
Supponiamo ora di poter suddividere il processore in più parti, ciascuna
delle quali si occupa di una sola fase dell’esecuzione dell’istruzione. In
un processore tradizionale, quando uno di questi stadi termina l’esecuzione delle operazioni di sua competenza, si pone in stato di attesa (idle)
finché tutti gli stadi non hanno completato l’esecuzione dell’istruzione,
come nello schema temporale seguente. Supponendo che ogni stadio
completi le sue elaborazioni in un ciclo macchina occorrono, per l’esecuzione di una singola istruzione, tanti cicli macchina quanti sono gli
stadi (nell’esempio 4).
Ciclo di clock
T1
T2
T3
T4
T5
T6
T7
T8
T9
T10
T11
T12
FCI1
idle
idle
idle
FCI2
idle
idle
idle
FCI3
idle
idle
idle
DCI1
idle
idle
DCI2
idle
idle
DCI3
idle
idle
Fasi di
esecuzione
di una
istruzione
EXI1
idle
EXI2
MD1
idle
EXI3
MD2
Istruzione 1
idle
MD3
Istruzione 2
Istruzione 3
In un’architettura pipeline, invece, per evitare tempi morti, ogni parte,
dopo aver completato le elaborazioni di sua competenza per l’istruzione
in corso, passa a elaborare l’istruzione successiva, come nel successivo
schema temporale. In questo caso, l’esecuzione della prima istruzione
necessita ancora di tanti cicli macchina quanti sono gli stadi, ma la seconda istruzione sarà completata soltanto dopo un solo ciclo di clock
aggiuntivo e così sarà anche per tutte le istruzioni seguenti.
Ciclo di clock
T1
T2
T3
T4
T5
T6
T7
T8
T9
T10
FCI1
FCI2
FCI3
FCI4
FCI5
FCI6
FCI7
FCI8
FCI9
FCI10
DCI1
DCI2
DCI3
DCI4
DCI5
DCI6
DCI7
DCI8
DCI9
EXI1
EXI2
EXI3
EXI3
EXI5
EXI6
EXI7
MD1
MD2
MD3
MD4
MD4
MD6
Istr. 5
Istr. 6
Istr. 7
Istr. 8
Istr. 9
Istr. 10
Fasi di
esecuzione
di una
istruzione
Istr. 1
Istr. 2
Istr. 3
Istr. 4
2. Architettura Harvard
L’architettura Harvard è un’architettura alternativa a quella di von
Neumann, proposta negli anni trenta da Howard Aiken all’università
5 Caratteristiche dei processori e delle memorie del PC
93
di Harvard e realizzata negli anni quaranta con il computer Mark IV;
questa architettura prevede due spazi di memoria, uno per i dati, l’altro
per i programmi e diversi bus per accedervi. Nell’architettura di von
Neumann, la CPU legge le istruzioni e i dati dalla memoria utilizzando lo stesso bus: quando carica un’istruzione, non può caricare anche
un dato. In un’architettura di Harvard il processore è invece in grado
di accedere in modo indipendente a dati e istruzioni, giacché questi
sono immagazzinati in memorie separate. Un processore dotato di architettura Harvard, può quindi parallelizzare le operazioni di lettura e
scrittura della memoria: questo permette un aumento di velocità, ma
obbliga alla presenza di circuiti più complessi all’interno del processore.
L’architettura Harvard viene spesso utilizzata in processori specializzati
nell’elaborazione dei segnali (DSP), come quelli che vengono utilizzati
per il trattamento dei dati audio o video.
Memoria
programmi
CPU
Memoria
dati
Figura 14
Architettura Harvard.
3.Il parallelismo e l’HyperThreading
Prima di introdurre una descrizione della tecnologia parallela e
dell’Hyper Threading, proviamo a capire brevemente quali sono le differenze concettuali tra processo e thread.
Tutti i programmi che vengono eseguiti sul sistema operativo, compreso
quest’ultimo, sono costituiti da una serie di processi elaborati dalla CPU
in maniera sequenziale. Ogni processo ha registri e variabili ed è eseguito
in maniera indipendente dagli altri processi: ciò significa che un processo possiede un proprio ambiente di elaborazione ben determinato.
I processi sono costituiti da thread diversi che non sono indipendenti
come i processi, ma condividono le stesse variabili globali: all’interno
dello stesso processo i thread cooperano per l’esecuzione di una ben determinata mansione. I thread sono spesso chiamati «processi leggeri».
Il programma rappresenta una lista delle azioni che i processi devono
compiere in un ben determinato modo. Riassumendo possiamo dire che:
1)I programmi sono costituiti da processi.
2)I processi sono indipendenti tra loro e possiedono dei registri e delle
variabili proprie.
3)I thread sono «processi leggeri» che hanno la caratteristica di condividere le stesse variabili globali per l’esecuzione di una ben determinata mansione.
94
4 Computer
4)Un processo può essere composto di un solo thread o di più thread.
5)Più thread in un processo possono essere utilizzati per condividere lo
stesso lavoro mentre processi diversi sono indipendenti.
L’esecuzione di un processo è unica, e non può avvenire contemporaneamente con un altro processo: questo significa che la CPU, in un singolo
istante, esegue un solo processo, ma in un arco di tempo maggiore passa
da un processo all’altro, dando all’utente l’impressione di calcolare più
processi contemporaneamente. Tale condizione si chiama «pseudo-parallelismo» e si riferisce al modo in cui la CPU alterna l’elaborazione di
più processi.
Avendo a disposizione due CPU in grado di calcolare contemporaneamente (parallelamente) più istruzioni, si può, in teoria, raddoppiare
la velocità di esecuzione dei programmi. Si parla in questo caso di parallelismo o di sistema multiprocessore. Il parallelismo consiste quindi nell’eseguire simultaneamente, su processori differenti, le istruzioni
relative a uno stesso programma: il programma è diviso in più processi
che vengono trattati in «parallelo» per guadagnarne in tempo di esecuzione. Questo tipo di tecnologia necessita tuttavia di una perfetta sincronizzazione e di una corretta comunicazione tra i diversi processori.
La tecnologia Hyper-Threading invece, consiste nell’ottenere due processori logici da una singola CPU fisica: questo significa che si ottengono due CPU virtuali che possono elaborare istruzioni in parallelo, aumentando notevolmente le prestazioni del sistema. Un processore fisico
diventa due CPU logiche, che condividono alcune risorse fisiche (cache,
registri ecc.) ma che sono in grado di elaborare le istruzioni in parallelo.
Riassumendo, se siamo alla presenza di sistemi multiprocessore, caratterizzati da due o più CPU reali, si parla di SMP (Symmetric Multi Processing), se invece abbiamo una sola CPU ed è utilizzato l’Hyper threading,
siamo alla presenza di una tecnologia chiamata SMT (Simultaneous
Multi Threading) e di processori logici. Durante la fase di «boot» del
sistema, il BIOS determina il numero di processori fisici e logici disponibili in quel momento.
4. Le CPU multicore
Come accennato in precedenza, la corsa all’aumento della frequenza di
clock delle CPU si è fermata: il massimo è stato raggiunto con i circa 3,8
GHz degli ultimi modelli di Pentium IV.
I motivi fondamentali di questa scelta sono stati i costi eccessivi di sviluppo e l’enorme aumento di consumi e di calore provocato da ogni
nuovo incremento della frequenza del clock.
Arrivati alla soglia dei 4 GHz di frequenza infatti, un ulteriore incremento del 10% della velocità, avrebbe comportato un aumento del 15%
dei consumi, con un miglioramento delle prestazioni inferiore al 10%.
Si è quindi passati da uno sviluppo «verticale» della tecnologia delle
CPU a uno «orizzontale» che consiste nell’integrare nello stesso package due o più core (anche 4 o 8) gemelli, che condividono le varie risorse della CPU stessa (cache, bus, registri). In questo modo si riescono
ad avere prestazioni quasi doppie senza far aumentare eccessivamente
5 Caratteristiche dei processori e delle memorie del PC
95
i consumi e il riscaldamento del processore. Occorre osservare inoltre,
che la fabbricazione di CPU che operano con frequenze più basse, è
molto più semplice e meno costosa.
Osservazione Può essere interessante notare come, fino alle CPU
Pentium IV l’incremento delle prestazioni era perseguito con tre tipi
di strategie:
• aumento della frequenza del clock;
• aumento della quantità di cache, in modo da minimizzare gli accessi alla più lenta memoria centrale;
• aumento della larghezza di banda verso la memoria centrale e diminuzione della latenza (intervallo di tempo o ritardo che intercorre
tra la richiesta di un dato e il momento della sua disponibilità).
Facendo un parallelo con il mondo dei motori, questo ha voluto dire
aumentare i giri del motore ottimizzando aspirazione e scarico: ma si
può aumentare anche la cilindrata. Per le CPU aumentare la cilindrata ha significato passare dall’architettura a 32 bit a quella a 64 bit (con
vantaggi però non eccezionali, specialmente per macchine e applicazioni di fascia bassa, che non sfruttano appieno le maggiori possibilità di trasferimento e elaborazione di dati a 64 bit). Ma si può anche
aumentare il numero dei cilindri: per le CPU questo ha significato
integrare più core nello stesso package. In questo modo si riescono ad
avere prestazioni quasi doppie senza far aumentare eccessivamente i
consumi e il riscaldamento del processore.
5. Gestione della memoria
Questa caratteristica per essere compresa in modo esaustivo dovrebbe
prevedere l’approfondimento sulle tecniche di gestione della memoria
che esula dai nostri obiettivi.
Come esempio per comprendere come i microprocessori gestiscono la
memoria, sarà illustrato brevemente il funzionamento della memoria
nei processori di prima generazione.
La quantità di memoria gestibile dipende dall’ampiezza del bus indirizzi: nei primi processori come l’8086 il bus indirizzi era di 20 bit e quindi
la memoria gestibile ammontava a 1 MB (220 byte). Inoltre, le CPU gestivano la memoria in modo segmentato, cioè tramite la sua suddivisione in parti, chiamate appunto segmenti; una cella di memoria, era
individuata indicando l’indirizzo iniziale del segmento e l’offset della
cella, cioè la sua distanza dall’inizio del segmento; questi valori erano
espressi solitamente nella forma «segmento:offset». Questo tipo di funzionamento è definito «real mode» (modo reale).
Osservazione Per meglio comprendere il funzionamento pensiamo che una parte dell’indirizzo sia il civico del nostro palazzo mentre
l’offset sia l’interno della nostra abitazione: quindi per un’identificazione corretta dell’appartamento (cella di memoria) forniamo come
dato «civico:interno».
96
4 Computer
Con il passaggio all’architettura dei processori a 32 bit, si sono introdotte molte novità che migliorano notevolmente la gestione della memoria,
attraverso l’uso della segmentazione in «protect mode» (modo protetto).
Questo modo di funzionamento fornisce direttamente dal lato hardware
un supporto alla multiprogrammazione, impedendo che un programma
possa accedere per errore all’area di memoria assegnata a un altro programma. La capacità d’indirizzamento è inoltre aumentata fino a 4 GB (232 byte).
La successiva evoluzione, con l’architettura x86-64, ha portato l’ampiezza
dei registri a 64 bit, introducendo una nuova metodologia di gestione della
memoria, sempre in «protect mode», che attraverso l’uso di indirizzi virtuali
permette di gestire una quantità di memoria assai superiore (264 byte). L’indirizzo è definito virtuale perché non necessariamente corrisponde al reale
indirizzo fisico di memoria: i processori sono in grado di gestire la memoria
virtuale con un meccanismo detto di paginazione dinamica.
La scelta del processore è un fattore chiave per un computer, poiché determina le prestazioni dell’intero sistema. È il primo elemento che si dovrà
scegliere in fase di assemblaggio o per decidere se un prodotto «brand»
(computer già assemblato dai costruttori) risponde alle nostre necessità.
Per la scelta di un processore destinato a un PC «consumer» o «small
business», potrebbe essere utile rispondere alle seguenti domande:
•A quale utilizzo è destinato il computer?
1.Utilizzo di pacchetti di office automation e navigazione su internet
2.Uso contemporaneo di più applicazioni
3.Esecuzione di applicativi impegnativi: CAD, grafica ecc.
•Quali strumenti di comunicazione devono essere utilizzati?
1. Chat (messaggistica immediata)
2. Video chat e Social network
3. Videoconferenza
•Come devono essere utilizzati i file multimediali?
1. Archiviazione e visione di file multimediali
2. Condivisione file multimediali on line
3. Editing di foto e video HD (Hight Definition)
•Quale tipo di videogame verranno utilizzati?
1. Nessuno
2. Videogame di base e social networking game
3. Videogames 3D
Rispondendo a queste domande avremo un’idea di come orientarci: il valore più ricorrente tra quelli indicati (1= entry level, 2= media potenza, 3=
high performance), ci indirizzerà sul tipo di processore da scegliere. Non è
di nessuna utilità fornire qui indicazioni più precise sui tipi di processori in
commercio, perché un processore di elevata potenza oggi è un potenziale
entry level domani. La scelta per situazioni professionali deve essere, invece, un risultato di fattori diversi e analizzata nell’ambito dell’intero contesto
aziendale: è buona norma individuare comunque soluzioni scalabili, identificando insieme al possibile processore (con particolare attenzione al socket),
una scheda madre che permetta un upgrade del processore al crescere delle
esigenze, se non addirittura la possibilità di installare un secondo processore.
5 Caratteristiche dei processori e delle memorie del PC
97
5.2
Caratteristiche delle memorie
Viene definito «memoria» un componente capace di registrare, per un determinato periodo di tempo, delle informazioni. Si distinguono due grandi
categorie di memoria:
•La memoria primaria (detta anche memoria centrale o memoria volatile), che permette di memorizzare temporaneamente i dati durante l’esecuzione dei programmi.
•La memoria secondaria (detta anche memoria permanente o memoria
di massa), che permette di registrare delle informazioni a lungo termine,
conservandole anche quando il computer è spento.
Le principali caratteristiche di una memoria sono le seguenti:
•la capacità, che rappresenta il volume globale delle informazioni (in bit)
che la memoria può contenere;
•il tempo di accesso, che corrisponde all’intervallo di tempo tra la richiesta di lettura/scrittura e la disponibilità del dato;
•il tempo di ciclo, che rappresenta l’intervallo di tempo minimo tra due
accessi successivi;
•la capacità di banda, che definisce il volume di informazioni scambiato
per unità di tempo, espressa in bit al secondo (bps).
Per le memorie a lettura-scrittura, il tempo di lettura è normalmente vicino al tempo di scrittura, per cui si parla genericamente di tempo di accesso.
Per le memorie scrivibili una sola volta, la scrittura può essere molto più
lenta della lettura; in tal caso, poiché la memoria sarà letta molte volte, si
considera come più significativo il tempo di lettura.
Queste caratteristiche, in modo particolare la velocità di accesso, determinano la tecnologia costruttiva e influenzano in maniera rilevante i costi
delle memorie. Per questo motivo nei computer sono utilizzate memorie
realizzate con diverse tecnologie, interfacciate le une con le altre e organizzate in modo gerarchico, secondo la velocità e le dimensioni:
Registri
CPU
Costo per bit
e velocità
Memoria Cache L2
Memoria Centrale
Dischi Magnetici
e dischi ottici
Figura 15
Gerarchia delle memorie.
98
4 Computer
Capacità
Cache L1
•Registri della CPU (forniscono la massima velocità di accesso a un costo
molto elevato);
•Cache, divisa in:
•interna alla CPU, detta anche Cache L1 (di primo livello);
•esterna alla CPU, detta anche Cache L2 (di secondo livello);
•Memoria centrale, detta anche memoria principale e spesso semplicemente (ma impropriamente) RAM;
•Dischi magnetici e dischi ottici (sono quelli che forniscono la massima
velocità di accesso al minimo costo).
Unità di misura della memoria
L’unità di misura della memoria è il byte (8 bit) e le dimensioni delle
memorie si misurano utilizzando i suoi multipli:
1 Kilobyte (KB) = 210 (1024) byte
1 Megabyte (MB) = 1024 KB = 220 (1 048 576) byte
1 Gigabyte (GB) = 1024 MB = 230 (1 073 741 824) byte
1 Terabyte (TB) = 1024 GB = 240 (1 099 511 627 776) byte
Ricordiamo che l’uso della decima potenza di 2 (1024 = 210) rende più
agevole l’uso di questi valori in formato binario e che i multipli non si
discostano troppo dalle usuali potenze di 10 (103, 106, 109, 1012) a cui
siamo abituati.
In questo paragrafo ci dedicheremo alla descrizione e classificazione della
memoria primaria, che è distinta in memorie della famiglia ROM (Read
Only Memory) e memoria RAM (Random Access Memory).
Funzionamento della memoria primaria
L’architettura delle memorie corrisponde a una matrice nella quale a ogni intersezione di riga e colonna, vi è una cella di memoria in cui è scritto/letto il bit;
si accede a una cella di memoria attraverso un indirizzo del tipo [riga,colonna]
Righe
Colonne
Figura 16
Schema memoria primaria.
La memoria ROM è una tipologia di memoria non volatile in cui i dati
sono memorizzati nella fase di costruzione e non possono essere modifi-
5 Caratteristiche dei processori e delle memorie del PC
99
cati successivamente. Nella ROM le celle sono realizzate attraverso diodi
o transistor e sono scritte in fase di realizzazione nella memoria. Questo
tipo di memoria è utilizzato, per esempio, per la memorizzazione del BIOS,
il programma che permette di pilotare le principali interfacce di entratauscita del sistema.
L’acronimo ROM è tuttavia utilizzato anche per identificare memorie che
possono essere cancellate e riprogrammate tramite processi particolari.
Tra queste vi sono le memorie scrivibili una sola volta, come le PROM
(Programmable Read Only Memory) e le memorie riscrivibili più volte,
come le EPROM (Erasable Programmable Read Only Memory) e le EEPROM (Electrically Erasable Programmable Read-Only Memory). Queste ultime differiscono tra loro per la diversa metodologia di cancellazione dei dati:
•nelle memorie PROM la cancellazione avviene attraverso esposizione ai
raggi UV
•nelle memorie EEPROM la cancellazione avviene invece elettricamente,
utilizzando tensioni più elevate rispetto a quelle normali di funzionamento.
Osservazione La memoria flash è una tipologia di EEPROM che per
le sue prestazioni non è usata come ROM, ma come memoria di massa
(vedi avanti). «Flash ROM» è il nome con cui è invece chiamata una memoria flash quando è utilizzata come ROM.
Titolo
I condensatori sono componenti elettronici che accumulano cariche elettriche. Questi componenti sono definiti
«componenti passivi».
100
La memoria RAM è una tipologia di memoria volatile e il termine
«random» (casuale) evidenzia come non ci siano differenze nei tempi
di accesso alle diverse celle della memoria. Sostanzialmente le memorie RAM si suddividono in RAM dinamiche (DRAM) e RAM statiche
(SRAM). Una RAM dinamica è composta da celle che memorizzano i
dati mediante cariche su condensatori: la presenza o assenza di carica
sul condensatore viene interpretata come bit 1 o bit 0. Le RAM dinamiche richiedono, a intervalli regolari, un refresh dell’informazione,
poiché i condensatori tendono per loro natura a scaricarsi. La RAM
statica è un dispositivo digitale che utilizza invece gli stessi elementi di
base del processore (transistor) per cui i valori binari sono memorizzati
attraverso porte logiche che mantengono i dati finché sono alimentate
e quindi, a differenza delle DRAM, non hanno bisogno di refresh. Sia
le RAM statiche che quelle dinamiche sono volatili e conservano i dati
solo in presenza di alimentazione. Le celle delle memorie dinamiche
sono più semplici e di dimensioni minori delle celle di memoria statica,
ma richiedono circuiti aggiuntivi per il refresh periodico (il costo di
questi circuiti aggiuntivi è però compensato dal costo inferiore della
singola cella). Le DRAM trovano quindi impiego per memorie di grandi capacità, mentre le SRAM, più veloci ma anche con costi maggiori,
sono utilizzate per la realizzazione di memorie cache sia interne (cache
L1) sia esterne (cache L2).
4 Computer
Osservazione Un espediente, utilizzato in alcuni tipi di memorie
DRAM, per consentire una miniaturizzazione più spinta e quindi ottenere maggiore quantità di memoria a parità di spazio occupato, è
quello di ridurre le linee dedicate all’indirizzo di memoria, dividendo
in due fasi l’indirizzamento della cella. Con questa tecnica viene fornito prima l’indirizzo di riga (segnale di RAS – Row Address Select)
e successivamente quello di colonna (segnale di CAS – Column Address select). Ipotizzando di avere una matrice di memoria composta
da 4096 righe e 256 colonne, per indirizzare tutte le celle avremmo
bisogno di:
– 4096 = 212 → 12 bit per indirizzare le righe.
– 256 = 28 → 8 bit per indirizzare le colonne.
In totale ci servirebbero quindi 12 + 8 = 20 bit di indirizzo; fornendo
l’indirizzo in due fasi avremmo bisogno invece soltanto di 12 bit che useremmo prima per contenere l’indirizzo di riga e successivamente quello
di colonna.
esempio
Tipologie di memorie DRAM
Nel corso dell’evoluzione tecnologica si sono succedute diverse tipologie di memorie DRAM: le odierne memorie DDR derivano dalle
SDRAM (Synchronous DRAM – DRAM sincrona), comparse nel 1997
e che erano le prime memorie dinamiche che permettevano una lettura sincronizzata dei dati con il bus della scheda madre. La tecnologia SDRAM ha consentito quindi di liberarsi dei tempi di attesa dovuti
alla sincronizzazione con la scheda madre, permettendo di raggiungere
tempi di accesso di circa 10 ns. �Le memorie SDRAM standard, utilizzano un metodo chiamato SDR (Single Data Rate) che consiste nel leggere
o scrivere un dato a ogni fronte montante del clock del bus della scheda
madre. Lo sviluppo successivo ha introdotto la tecnologia DDR (Double Data Rate) fornita di un’architettura di tipo prefetch 2n-bit grazie
alla quale a ogni ciclo di clock vengono effettuate due operazioni di I/O.
Le memorie DDR2, evoluzione delle precedenti, hanno un’architettura
di tipo prefetch 4n-bit, e quindi a ogni ciclo di clock vengono effettuate quattro operazioni di I/O. La generazione DDR3 utilizza un di tipo
prefetch 8n-bit raddoppiando ancora la quantità di dati trasferiti a ogni
ciclo di clock.
Con un bus a 64 bit i dati sono trasferiti 8 byte per
volta (8 bit = 1 Byte). Una memoria RAM di tipo DDR
ha quindi una velocità di trasferimento VT pari a:
VT = BM · 2 · 8
dove BM è la velocità di clock del bus di memoria, 2
è il numero di I/O per ciclo di clock, 8 è il numero di
byte trasferiti a ogni invio. Con una frequenza di clock
di 200 MHz, una DDR SDRAM permette una velocità
massima di trasferimento di 3200 MB/s, infatti:
VT = 200 · 2 · 8 = 3200 MB/s
Una DDR2, a parità di clock, avrà una VT doppia:
VT = 200 · 4 · 8 = 6400 MB/s
Una DDR3 infine, sempre a parità di clock, avrà una
VT quadrupla:
VT = 200 · 8 · 8 = 12800 MB/s
5 Caratteristiche dei processori e delle memorie del PC
101
Osservazione Nella realtà la situazione è più complessa, poiché la velocità di trasferimento è notevolmente influenzata dai fenomeni di latenza
che si verificano durante le operazioni di lettura/scrittura e che dipendono
strettamente dal tipo e dalla qualità del chip, nonché dalla frequenza di
funzionamento. Per quantificare tali fenomeni, a ogni banco di memoria sono associati dei tempi caratteristici detti timings, misurati in unità
di cicli di clock: a valori più bassi, a parità di frequenza, corrispondono
prestazioni migliori. Con il susseguirsi delle generazioni questi tempi di
latenza sono aumentati: le DDR1 lavoravano con tempi di latenza di 2 o 3
cicli di clock; le DDR2 arrivano a latenza 4 o 5, mentre le DDR3 hanno una
latenza da 5 a 8 cicli di clock. Questo perché aumenta la quantità di cicli di
clock necessari alla DRAM per «riempire» il proprio prefetch buffer.
Fattori di forma delle memorie DRAM
Le memorie DRAM si presentano tutte sotto forma chip saldati su piccoli
circuiti stampati, chiamati moduli o banchi di memoria, inseribili nella
scheda madre sugli appositi connettori per le memorie. Si distinguono due
principali tipi di moduli RAM:
1.Moduli di formato DIMM (Dual Inline Memory Module) destinati ai PC
Desktop, sono delle memorie a 64 bits. I moduli DIMM hanno dei chip di
memoria su entrambe le parti del circuito stampato con 84 connettori da
ogni parte. Le memorie della famiglia DDR sono dotate di un «encoche»
(letteralmente tacca) per il corretto posizionamento nello slot.
DDR
DDR 2
DDR 3
cm.
0
1
Figura 17
DDR.
102
4 Computer
2
3
4
5
6
7
8
9
10
11
12
13
2.Moduli di formato SO DIMM (Small Outline DIMM), destinati ai computer portatili con 144 PIN per le memorie a 64 bits.
SO-DIMM DDR
titolo
I connettori DIMM sono dotati
di leve poste ai lati del connettore stesso per facilitare
l’inserimento dei moduli di
memoria.
200-Pin SO Chanel
20 pin
90 pin
SO-DIMM DDR 2
200-Pin SO Chanel
20 pin
90 pin
SO-DIMM DDR 3
200-Pin SO Chanel
20 pin
60 pin
cm.
0
1
1,51,6
2
2,40
3
4
5
6
6,76
Figura 18
DDR.
La correzione degli errori
I moduli o banchi di memoria possono essere dotati di meccanismi che
permettono di rimediare agli errori e garantire l’integrità dei dati che contengono. Questi tipi di memoria sono generalmente utilizzati su sistemi
che lavorano con dati critici, ed è la ragione per cui le troviamo soprattutto
nei server.
1. Bit di parità
I moduli con bit di parità permettono di assicurare che i dati contenuti
nella memoria siano effettivamente quelli voluti. Come funziona? Uno
dei bit, chiamato bit di parità, di ogni byte immagazzinato in memoria
è utilizzato per contenere la somma dei bit di dati. Ci sono due diversi
metodi per utilizzare questo bit: il primo si chiama «bit di parità pari»,
il secondo «bit di parità dispari». Nel primo caso si pone il bit di parità
uguale a 1 se il numero di «1» in un certo insieme di bit è dispari, facendo così diventare il numero totale di «1», incluso il bit di parità, pari. Nel
5 Caratteristiche dei processori e delle memorie del PC
103
secondo caso, invece, è il contrario: si pone il bit di parità uguale a 1 se il
numero di «1» in un certo insieme di bit è pari, facendo diventare così il
numero totale di 1, incluso il bit di parità, dispari.
prima della trasmissione
Byte con bit di parità
7 bit di dati
Bit di parità pari
Bit di parità dispari
1101001
01101001
11101001
1111111
11111111
01111111
Se durante la trasmissione dei dati questo «codice di controllo» non è corretto, significa che durante la trasmissione è avvenuto un errore. Il bit di
parità è quindi un segnalatore di errore ma non è un codice di correzione
poiché non c’è modo di determinare quale particolare bit è sbagliato.
dopo la trasmissione
Byte con bit di parità
7 bit di dati
titolo
Una «word»(parola) in informatica identifica 2 byte, cioè 16
bit; quindi dword (double word)
indentifica 32 bit e quadword
(quadruple word) 64 bit.
titolo
banda passante o larghezza di
banda è l’intervallo di frequenze disponibili per la trasmissione di un segnale: per i segnali
digitali, la larghezza di banda
viene generalmente misurata
in bps (bit per secondo).
Bit di parità pari
Bit di parità dispari
1101001
01101001 (corretto)
11101001 (corretto)
1111111
01111111 (sbagliato)
11111111 (sbagliato)
2. Moduli EC
I moduli di memoria ECC (Error Correction Coding) hanno alcuni bit
dedicati alla correzione degli errori. Questi moduli, utilizzati principalmente nei server, permettono di rilevare gli errori e di correggerli.� Il
codice di correzione lineare di Hamming (dal nome del suo inventore
Richard Wesley Hamming) è quello più frequentemente usato in questi
moduli e permette di correggere errori su di un singolo bit ogni gruppo
di 64 bit (quadword) e di rilevare anche errori doppi.
Dual Channel
Alcuni controllori di memoria propongono un doppio canale (in inglese
Dual Channel) per la memoria. Si tratta di sfruttare i moduli di memoria a
coppia per accumulare la banda passante e così sfruttare al massimo le capacità del sistema. È essenziale, per l’utilizzo del Dual Channel usare moduli
identici nella coppia (frequenza, capacità e di preferenza anche produttore).
Presentiamo ora un esempio di scheda tecnica delle memorie DDR: si consideri che normalmente i rivenditori propongano solo alcune informazioni
e che per avere i dettagli della singola memoria si deve consultare il datasheets (scheda tecnica completa) sul sito del produttore.
Esempio di scheda tecnica di una memoria DDR
Capacità
4 GB
Numero di moduli nella confezione
2
Tecnologia
DDR3
Tensione
1.5V
Velocità
1066MHz
CAS Latency
CL7
Caratteristiche
DIMM 240-pin
Placcato
Gold
Ampiezza modulo
Unbuffered
Garanzia
A vita
Controllo degli errori
ECC
Costruttore
–––––––
104
4 Computer
La memoria è un elemento strettamente collegato all’hardware del PC e in particolar modo alla scheda madre: quando dobbiamo acquistare della memoria ci
dobbiamo sempre avvalere del manuale della scheda madre, dove viene indicata
la compatibilità con i diversi modelli di DDR. Un discorso a parte va fatto per i
server: le case produttrici di tali macchine (come per esempio HP, IBM, Lenovo,
ecc.), propongono di installare memorie certificate per i propri sistemi; al momento dell’acquisto della memoria, sarà allora necessario fornire il modello di
server ed eventualmente, per una maggior precisione, il serial number. È possibile comunque avvalersi di memorie compatibili e a questo scopo, molti costruttori di memorie, come Kingstone, presentano sui propri siti dei percorsi guidati
per determinare l’esatto modello di memoria necessario a un determinato server.
6 Tecnologie e prestazioni
dei dischi del PC
I dischi rigidi sono stati introdotti nel 1956 come storage secondario dei dati;
dal 1980 i dischi sono stati una caratteristica aggiuntiva, rara e costosa, dei personal computer e solo dalla fine degli anni ’80 sono diventati dotazione di serie
su tutti i PC; nel corso degli anni questi dispositivi sono diminuiti di dimensione fisica e di costo mentre è cresciuta esponenzialmente la loro capacità.
PUn disco rigido (HDD – Hard Disk Drive, anche disco fisso) è un dispositivo di archiviazione dati non-volatile, digitale, ad accesso casuale
che utilizza tecnologia magnetica per registrare i dati.
Storage
Storage: come sostantivo in
inglese può essere tradotto
con «immagazzinamento», ma
viene anche usato per indicare
la memoria di massa.
Fisicamente l’HDD è costituito da piatti di alluminio, ceramica o vetro,
ricoperti da materiale ferromagnetico, sovrapposti e montati su un perno
in rotazione: su ogni piatto è presente una testina per accedere in scrittura
o in lettura ai dati memorizzati sul piatto stesso; tutte queste componenti si
trovano all’interno di una custodia metallica protettiva.
Come funziona
I piatti che compongono l’HDD girano a velocità variabile: un braccio meccanico, detto braccio attuatore o braccio di accesso, sul quale sono montate le
testine posizionate sia sopra che sotto il piatto, si sposta con un movimento ad
arco, passando molto vicino alla superficie magnetica (figura a lato). Le testine
non toccano il disco ma galleggiano su un cuscino d’aria sfiorando la superficie; la testina tocca il disco in una zona chiamata «Landing Zone» (che non
contiene dati), solo quando il computer è spento. Grazie a questo movimento
le testine possono accedere a quasi tutta la superficie disponibile per leggere
o scrivere le informazioni; l’informazione, in bit, è rappresentata dai cambia-
6 Tecnologie e prestazioni dei dischi del PC
105
menti sequenziali di magnetizzazione sul piatto. I dati sono generalmente memorizzati su disco seguendo uno schema di allocazione fisica ben definito in
base al quale si può raggiungere la zona dove leggere o scrivere i dati.
Track/
Cylinder
Sector
Heads
8 Heads,
4 Platters
Figura 19
HDD.
Formati
•Formato LBA (Logical block addressing – indirizzamento logico a blocchi): i settori del disco sono numerati in sequenza a partire dal numero
0. Ogni settore è identificato dal suo numero LBA.
•Formato CHS (Cylinder/Head/Sector – Cilindro/Testina/Settore): un settore è identificato dal «Cylinder/Head/Sector number». In precedenza questi
valori indicavano la posizione fisica del settore sul disco, oggi sono solo
valori logici. Il formato CHS è limitato a una dimensione del disco da 8 GB.
Il formato CHS ha le seguenti limitazioni:
Numero dei cilindri
0–1023
(10 bit)
Numero di testine
0–254
(8 Bit)
Numero dei settori
1–63
(6 bit)
Osservazione Nella tabella delle partizioni del formato CHS ci sono
solo 24 bit disponibili: con una dimensione del settore di 512 byte è possibile indicizzare tutti i settori di un disco fino a un formato massimo
di circa 8 GB ➝ 1024 (Cilindri) 3 255 (testine) 3 63 (settori) 3 512
(dimensione settore) = 8.422.686.720 byte = 8.4 GB.
Nella tabella delle partizioni del formato LBA, si dispone invece di 32 bit e con le
dimensioni dei settori sempre di 512 byte si possono indicizzare tutti i settori di
un disco fino a una dimensione massima di 2048 GB (2 TB). Per eseguire il calcolo, non dovendo tener conto di cilindri, testine e settori, si procede nel seguente modo 232 (numero di bit) 3 512 (dimensione settore) = 2.199.023.255.552
byte = 2, 2 TB. Considerando la possibilità di utilizzare 64 bit per memorizzare
il numero LBA, si ha la possibilità di supportare anche dischi più grandi.
106
4 Computer
Dimensioni fisiche
La dimensione fisica, o fattore di forma, nel corso dell’evoluzione tecnologica ha subito molti cambiamenti; negli ultimi anni si è standardizzata sui
valori sotto riassunti.
Fattori di forma del disco fisso:
Fattore
Larghezza
Altezza
Grande
di forma
Piatti (Max)
Utilizzo Principale
capacità
3.5 "
102 millimetri
19 o 25,4 millimetri
4 TB
5
Personal computer, Server
2.5 "
69,9 millimetri
7, 9.5, 11, o 15 mm
1,5 TB
4
Notebook
1.8 "
54 millimetri
5 o 8 mm
320 GB
3
Netbook e Notebook ultra leggeri
Caratteristiche per identificare le prestazioni di un HDD
Le caratteristiche principali di un disco rigido sono:
•La capacità
•Il tempo di accesso
•La velocità di trasferimento
La capacità
La capacità è un fattore definito dal numero di piatti, presenti nel disco
e dalla densità di memorizzazione magnetica dei piatti: nelle moderne
unità è espressa in giga e terabyte. La capacità di un HDD, può apparire
però all’utente finale diversa da quella dichiarata dal produttore del disco.
I produttori, infatti, utilizzano le unità di misura come potenze di 10, convenzione diversa da quella utilizzata dai produttori di memoria primaria
(RAM, ROM ), in cui le unità di misura sono invece espresse come potenze
di 2.
Nella tabella sottostante sono riportati alcuni esempi pratici:
Capacità pubblicizzata Capacità prevista dal produttore da parte del consumatore (Utilizzando multipli decimali)
(Utilizzando multipli binari)
Con prefisso
Byte
Byte
Differenza
100 MB
100.000.000
104.857.600
+ 4,86%
100 GB
100.000.000.000
107.374.182.400
+ 7,37%
1 TB
1.000.000.000.000
1.099.511.627.776
+ 9,95%
Tempo di accesso
I fattori che limitano il tempo di accesso ai dati su un disco rigido sono
per lo più legati alla natura meccanica delle testine e dalla rotazione dei
dischi.
Il tempo di accesso al disco è influenzato da cinque fattori:
•Controller Overhead: indica il tempo necessario all’invio dell’opportuno interrupt per la gestione dei dati (normalmente è molto
esiguo);
6 Tecnologie e prestazioni dei dischi del PC
107
•Seek time (tempo di ricerca): è il tempo necessario a spostare la testina
sulla traccia dove è presente il dato cercato (è il fattore più critico poiché
si tratta di un movimento meccanico);
•Assessment time (tempo di assestamento): è il tempo necessario per il
perfetto posizionamento della testina sulla traccia dopo lo spostamento
(spesso e indicato come unico valore nel ‘Seek time’);
•Latency time (tempo di latenza): è determinato dalla possibilità che il
settore desiderato possa non essere direttamente sotto la testina quando è richiesto il trasferimento dei dati; è quindi un valore che dipende
strettamente dalla velocità di rotazione del disco, come evidenziato dalla
seguente tabella:
Velocità di rotazione
Latenza Media
(in Rpm – Revolutions per minute)
(in ms)
15000
2
10000
3
7200
4,16
5400
5,55
4800
6,25
•Transfer time (tempo di trasferimento): è il ritardo che si crea per il
trasferimento dei blocchi di dati ed è in funzione del numero di blocchi
da trasferire (in genere è relativamente breve, ma può essere piuttosto
lungo per il trasferimento di grandi file contigui); dipende naturalmente anche dalla velocità di rotazione del disco. Il Transfer time è così calcolato:
TR = Nb / r 3 NbT
Titolo
Interrupt o interruzione è un
segnale che indica il «bisogno
di attenzione» da parte di una
periferica.
dove TR è il tempo di trasferimento, Nb è il numero di byte da trasferire,
r è la velocità del disco in giri al secondo e NbT è il numero di byte su
una traccia.
Il tempo di accesso medio si calcola quindi con la seguente formula:
Tempo di accesso: ControllerOverhead + SeekTime + LatencyTime +
TransferTime
Velocità di trasferimento
La velocità di trasferimento indica la quantità di dati comunicata dal
disco rigido in un intervallo di tempo (solitamente un secondo). La
velocità di trasferimento è resa più efficiente se si aumentano la velocità
di rotazione e la densità di memorizzazione. La velocità diminuisce con
il trasferimento di grandi file specialmente se frammentati in spazi non
contigui.
Osservazione La deframmentazione è una procedura usata per minimizzare il ritardo nel recupero dei dati, spostando gli elementi comuni
nelle aree fisicamente contigue sul disco.
108
4 Computer
eseRCIZIO
Sia dato un HDD con tempo di ricerca di 10ms, velocità di rotazione di 7200 rpm e velocità di trasferimento di 40 MBps. Calcolare il tempo necessario per
trasferire un blocco di 512 byte.
Tempo di accesso = Seek time + Latency time = 10
3 10– 3s + 4,16 3 10– 3s
512 3 10– 6
s
Tempo di trasferimento =
40
Trascurando il Controller Overhead e l’Assessment time,
che abbiamo visto sono normalmente molto esigui, e facendo attenzione a esprimere tutto in secondi otteniamo:
Bisogna sommare i due tempi trovati e dopo un po’
ci calcoli si ottiene un risultato approssimato per eccesso di circa 15 ms. Per trasferire quindi un settore
da 512 byte questo hard disk impiega circa 15 ms.
Oltre alle caratteristiche in precedenza illustrate ci sono altre specifiche che
influenzano in misura minore le prestazioni di un disco rigido:
•Il buffer di memoria
•La velocità dell’interfaccia
•Native Command Queuing
•Consumo energetico
•Rumore
•Resistenza agli urti
Il buffer di memoria
Il buffer è una piccola memoria cache, in genere di alcuni megabyte, presente nel disco a bordo della circuiteria, con la funzione di memorizzare
i dati in lettura o in scrittura. Nel caso in cui un programma legga ripetutamente le stesse informazioni, queste possono essere trovate nel buffer
invece che sul disco. La velocità di trasferimento del buffer, essendo realizzato attraverso componenti elettronici e non meccanici, è decisamente
maggiore di quella del disco. Il buffer di memoria può raggiungere i 64 MB
e funziona quindi da adattatore della velocità di trasferimento.
La velocità dell’interfaccia
L’interfaccia di collegamento tra il disco rigido e la scheda madre può influenzare le prestazioni poiché specifica la velocità massima alla quale le
informazioni possono essere trasferite da o per il disco. Le interfacce Serial
ATA (SATA) o Serial Attached SCSI (SAS), di cui parleremo più avanti,
possono trasferire centinaia di megabyte per secondo, molto più di quanto
qualunque singolo disco fisso possa fare, quindi l’interfaccia non è in genere un fattore limitante. Se invece si usano più dischi in configurazione
RAID, è importante utilizzare un’interfaccia il più veloce possibile.
tabella della velocità dell’interfaccia.
Prestazioni teoriche
Tipo
Megabit/s
Megabyte/s
SATA 1.0
1,5 Gbit/s
192 MB/s
Titolo
SATA 2.0
3 Gbit/s
384 MB/s
SATA 3.0
6 Gbit/s
768 MB/s
SAS
6 Gbit/s
768 MB/s
SAS con aggregazione di canali in full-duplex
24 Gbit/s
3072 MB/s
L’interfaccia rappresenta quel
componente, fisico o logico,
che permette a due o più dispositivi di poter comunicare e
interagire tra loro.
6 Tecnologie e prestazioni dei dischi del PC
109
RAID (Redundant Array of Inexpensive Disks) è un sistema che usa un
gruppo di dischi rigidi per condividere o replicare le informazioni. L’utilizzo di tale sistema permette una maggiore integrità dei dati poiché questi sono duplicati su più dischi (secondo i livelli) e in caso di guasto di un
disco non c’è perdita di dati.
Nel suo livello più semplice, il sistema RAID permette di combinare un
insieme di dischi in una sola unità logica. In questo modo il sistema operativo gestisce i differenti dischi come un unico volume. Il RAID è tipicamente usato nei server, e di solito è implementato con dischi d’identica
capacità. I livelli RAID più comunemente implementate sono 0, 2 e 5.
–Il livello 0 divide i dati equamente tra due o più dischi (operazione
detta di striping) senza però nessuna informazione di parità o ridondanza. Non essendoci ridondanza, per molti questo tipo di progettazione non è definibile un vero e proprio RAID, poiché non c’è alcuna
ridondanza. RAID-0 è molto utile, per esempio, quando montare molti dischi è dispendioso (o impossibile), oppure quando il numero di
dischi sia limitato dal sistema operativo.
–Il livello 1 fornisce il mirroring del disco, un’ operazione con la quale
tutti i dati vengono copiati su due o più dischi: se uno dei dischi non
funziona il sistema può immediatamente passare a un altro disco senza alcuna perdita di dati. RAID-1 migliora le prestazioni in lettura, ma
il miglioramento delle prestazioni e la tolleranza ai guasti sono a carico della capacità disponibile nelle unità utilizzate; è utile in tutti quei
casi nei quali la ridondanza è più importante dello sfruttare appieno la
capacità dei dischi.
–Il livello 2 è un è sostanzialmente un RAID-0 maggiormente affidabile,
nel quale i dati sono divisi a livello di bit (invece che di blocco); per
correggere gli errori su singoli bit usa il codice di Hamming che permette anche di rilevare errori doppi. È utilizzato in ambienti in cui si
verificano numerosi errori di lettura o scrittura.
–Il livello 5 è il più frequentemente utilizzato. Esso fornisce lo striping
dei dati a livello di blocco, con i dati di parità distribuiti tra tutti i dischi appartenenti al RAID. Questo si traduce in prestazioni eccellenti,
unite alla possibilità di recuperare i dati persi. Il RAID5 riduce le capacita globali di storage per esempio se l’unità è dotata di 4 Hard Disk
in tecnologia SATA da 2 TB ognuno e il sistema prevede la configurazione in RAID 5, la capacità totale sarà di soli 6 TB, in quanto gli 2 TB
saranno utilizzati per la ridondanza.
Native Command Queuing
Negli HDD SATA è stata introdotta una tecnologia ereditata dai dischi
SCSI, la Native Command Queuing (NCQ), progettata per incrementare
le prestazioni, consentendo di eseguire contemporaneamente più comandi
sulla stessa unità. Un’unità SATA che supporta NCQ, è dotata di una coda
interna nella quale i comandi possono essere riordinati (cambiandone la
sequenza), per ridurre al minimo il numero di rotazioni e il tragitto delle
testine, eseguendo tutti gli accessi nel più breve tempo possibile. Per esem110
4 Computer
pio, se occorre accedere a una serie di dati non sequenziali distribuiti in
varie zone del disco, le testine dovrebbero saltare da un cilindro all’altro,
avanti e indietro: con l’NCQ, il disco rigido crea una coda delle richieste di
accesso e le riordina ottimizzandone la sequenza. I criteri per ottimizzare
l’esecuzione dei comandi in coda tengono conto di due fattori: la rotazione
dei piatti e il posizionamento sulla traccia (seek), parametri necessari per
determinare il tragitto più breve per visitare tutti i blocchi di dati che la
coda di comandi prevede di dover leggere e/o scrivere.
Questo metodo si può paragonare al problema di un corriere che deve portare a termine delle consegne in una grande città: per ottimizzare il lavoro,
prima analizza tutti gli indirizzi dei destinatari e poi stabilisce il percorso
che richiede il minor tempo per effettuare le consegne. Immaginate cosa
succederebbe se invece effettuasse le consegna in sequenza: probabilmente
sarebbe costretto a saltare continuamente da un capo all’altro della città!
Osservazione Nel caso si abbia un HDD con supporto per NCQ bisogna fare attenzione che tale funzionalità sia gestita anche dalla scheda
madre, che dovrà avere, all’interno del BIOS, la funzionalità Advanced
Host Controller Interface (AHCI), che permette la gestione di tali dischi.
Consumo energetico
Il consumo di energia è diventato sempre più importante, non solo in dispositivi mobili come computer portatili, ma anche in server e desktop.
L’aumento delle periferiche e dei dispositivi installati sui personal computer ha portato a problemi di fornitura di energia sufficiente per tutti i
componenti presenti, specialmente in fase di avvio; inoltre, con l’aumentare della richiesta energetica, aumenta anche la produzione di calore dei
componenti. La dissipazione del calore è legata direttamente al consumo di
energia e la possibilità di rottura o di malfunzionamenti del disco, aumenta
con l’aumentare delle temperature.
Rumore
Misurato in dBA, il rumore udibile è significativo per determinate applicazioni, come per esempio la registrazione audio digitale. Dischi a basso
rumore in genere utilizzano cuscinetti a fluido e una più lenta velocità di
rotazione (di solito 5400 rpm). HDD in fattori di forma più piccoli (per
esempio 2,5 pollici) sono spesso più silenziosi rispetto alle grandi unità.
Resistenza agli urti
La resistenza agli urti è particolarmente importante per i dispositivi mobili.
La resistenza massima agli urti è di 350 g durante il funzionamento e di
1000 g in fase non operativa.
Dalla meccanica allo stato solido
Lo sviluppo tecnologico dei dispositivi di memoria ha introdotto nel
mercato diversi sistemi esterni per la memorizzazione dei dati (penne
usb, memory card ecc.), con sempre maggior capacità di memorizzazione. Negli ultimi anni si è assistito all’introduzione di dischi (o drive) allo
6 Tecnologie e prestazioni dei dischi del PC
111
stato solido, denominati SSD (Solid-State Drive), che utilizzano appunto
una memoria a stato solido (in particolare la memoria flash) per l’archiviazione dei dati. Il termine «disco a stato solido» è improprio perché
all’interno del dispositivo SSD non c’è nessun disco: l’utilizzo del termine
«disco», deriva dal fatto che questa tipologia di dispositivi di memoria di
massa, svolge la medesima funzione del disco rigido ed è quindi utilizzato
in sua sostituzione.
Vantaggi
La totale assenza di parti meccaniche in movimento porta diversi vantaggi,
di cui i principali sono:
•rumorosità assente;
•minore possibilità di rottura;
•minori consumi durante le operazioni di lettura e scrittura;
•tempo di accesso ridotto: si lavora nell’ordine dei decimi di millisecondo, mentre il tempo di accesso dei dischi magnetici è 50 volte maggiore;
•maggiore resistenza agli urti: le specifiche di alcuni produttori arrivano
a dichiarare resistenza a shock di 1500 gr.;
•maggiore durata: i dischi a stato solido hanno mediamente un tasso di
rottura inferiore a quelli degli hard disk; questo tasso oscilla tra lo 0.5%
e il 3%, mentre negli hard disk può raggiungere il 10%.
•minore produzione di calore.
Svantaggi
A fronte di una maggiore resistenza agli urti e a un minor consumo, le unità a stato solido hanno due principali svantaggi:
•maggiore prezzo per bit, pari a circa dieci volte il costo di un disco rigido
tradizionale;
•possibile minor durata dell’unità, a causa del limite di riscritture delle
memorie flash.
Entrambi i problemi sembrano però destinati a risolversi in breve tempo.
Le nuove tecnologie stanno sviluppando memorie flash in grado di garantire durate pari o superiore a quella di un disco rigido tradizionale, e i
produttori dichiarano 140 anni di vita con 50 GB di riscritture al giorno,
su un’unità da 250 GB. Il costo di questa tecnologia sta inoltre lentamente
scendendo, facendo facilmente supporre una futura sostituzione dei dischi
tradizionali con unità a stato solido.
SSD – Prestazioni in lettura e scrittura
Una caratteristica tipica delle prestazioni di un dispositivo SSD è la minore velocità in scrittura rispetto a quella in lettura. Questo è dovuto al
File system dei Sistemi Operativi (vedi capitolo successivo) che solitamente usa blocchi di celle della dimensione di 4KB, mentre nei dispositivi SSD la dimensione dei blocchi è molto più grande (fino a 4MB).
Vediamo di capire meglio cosa succede quando dobbiamo salvare un
file: alla richiesta di scrittura il controller dell’unità SSD per scrivere
112
4 Computer
4KB legge l’intero blocco (es. 512 KB), inserisce la nuova informazione
e riscrive totalmente l’intero blocco, così per scrivere solo 4KB finisce
per scriverne molti di più (512KB se questa è la dimensione del blocco).
Questa perdita di prestazione si evidenzi maggiormente con il riempimento dell’unità.
Un modo per migliorare le prestazioni è di conoscere quali sono i blocchi
liberi: per ottenere questo i Sistemi Operativi di ultima generazione mettono a disposizione il comando TRIM che comunica al controller dell’SSD
quali blocchi sono inutilizzati, migliorandone notevolmente le prestazioni.
Questa funzione non è ancora supportata nei sistemi RAID.
Confronto tra SSD e HDD
Elementi smontati di un disco rigido e componenti di un disco a stato solido.
Fare un confronto tra SSD e HDD classico è complesso. Normalmente i
tradizionali benchmark (test delle prestazioni) degli HDD si concentrano
sull’analisi degli aspetti in cui le prestazioni dei dischi classici sono deboli,
come per esempio il tempo di latenza rotazionale e il tempo di ricerca,
mentre quelle degli SSD, dove non ci sono parti meccaniche, presentano
enorme superiorità. Abbiamo quindi effettuato una comparazione descrittiva prendendo in esame tutte le caratteristiche principali:
Caratteristica
Dischi a stato solido (SDD)
Dischi rigidi (HDD)
Spin up (tempo di avvio)
Quasi istantanea, niente meccanica «spin up». Potrebbero essere necessari pochi millisecondi per
uscire da un sistema automatico di modalità di
risparmio energetico.
Può richiedere diversi secondi. Con un
gran numero di unità, potrebbe essere necessario scaglionare lo spin-up per limitare
la potenza totale assorbita.
Accesso Casuale
Circa 0,1 ms – molte volte più veloci rispetto agli
HDD in quanto ai dati si accede direttamente dalla
memoria flash.
Range 5–10 ms a causa della necessità di
spostare le testine e attendere la rotazione del disco per il corretto posizionamento
della testine sui dati in lettura / scrittura
Latenza
Generalmente bassi perché i dati possono essere
letti direttamente, indipendentemente dalla posizione.
Generalmente elevata poiché i componenti
meccanici richiedono più tempo per il corretto allineamento.
Prestazioni di lettura
Le prestazioni non cambiano in base alla posizione in cui i dati sono memorizzati su un SSD.
Se i dati sono scritti in modo frammentario,
la rilettura dei dati avrà tempi diversi di risposta
6 Tecnologie e prestazioni dei dischi del PC
113
Deframmentazione
Non hanno nessun beneficio dalla deframmentazione, perché c’è poco vantaggio nella lettura dei
dati in modo sequenziale.
Può esser richiesta la deframmentazione
per migliorare la velocita di trasferimento.
Rumore
Non hanno parti in movimento e non fanno rumore.
Hanno parti in movimento (testine, motore,
ecc.) e possono produrre rumori.
Affidabilità meccanica
La mancanza di parti in movimento elimina la possibilità di guasti meccanici.
Hanno molte parti in movimento che sono
tutte soggette a guasto nel corso del tempo.
Sensibilità ai fattori ambientali
Sballottamento, altitudine o vibrazioni non generano errori vista la mancanza di parti in movimento.
Le testine mobili e i piatti rotanti sono generalmente sensibili agli urti, all’altitudine e
alle vibrazioni.
Suscettibilità Magnetica
Nessun impatto sulla memoria flash.
Calamite o impulsi magnetici possono alterare i dati sul supporto.
Peso e dimensioni
Sia il peso della memoria flash che le sue dimensioni sono inferiori rispetto a quelle degli HDD.
L’HDD da 3,5» sono realizzati con componenti più pesanti rispetto agli HDD portatili:
quest’ultimi sono molto simili come peso
all’SSD
Funzionamento in parallelo
Alcuni controller flash possono scrivere dati contemporaneamente.
Hanno due testine per piatto ma sono
collegati e condividono un solo motore di
posizionamento, quindi risulta impossibile il
funzionamento in parallelo.
Durata
Sono basati su memorie flash che nel loro ciclo
di vita hanno un numero limitato di scritture (1-5
milioni) . Alcuni controller attraverso procedure
software gestiscono in modo ottimale questa limitazione, in modo tale che le unità possono durare
molti decenni prima della rottura. Gli SSD basati
su memorie DRAM non hanno un numero limitato
di scritture.
I supporti magnetici che costituiscono gli
HDD non hanno un numero limitato di scritture, ma sono suscettibili a eventuali guasti
meccanici.
Costo per la capacità
Circa 1,20-2,00 (US) $ per GB.
HDD 3,5" circa 0.05(US) $ per GB.
HDD 2,5" circa 0.10 (US) $ per GB.
Capacità di memoria
Sono disponibili in diverse dimensioni fino a 2 TB,
ma non sono in genere più grandi di 40-120 GB, a
causa del loro elevato costo per GB.
Tipicamente le unità installate sono da 500
GB ma sono inoltre disponibili da 1 TB, 2
o 3 TB.
Lettura / scrittura: simmetria delle prestazioni
Meno costosi in genere hanno velocità di scrittura significativamente più basse rispetto alle
velocità di lettura. SSD di qualità superiore eseguono lettura e scrittura a una velocità quasi
equivalente.
In genere hanno una velocità di scrittura
leggermente inferiore rispetto a quella di
lettura.
Disponibilità dei blocchi
liberi (TRIM)
La prestazione in scrittura è significativamente influenzata dalla disponibilità di blocchi liberi utilizzabili. Attraverso l’utilizzo della funzione TRIM, si
migliora l’efficienza in scrittura.
Non sono interessati dalla conoscenza di
eventuali blocchi liberi indicati dal comando
TRIM.
Consumo di energia
SSD ad alte prestazioni basati su memorie flash in
genere richiedono da 1/2 a 1/3 di quanto richiesto
da un HDD; SSD realizzati con DRAM ad alta prestazione in genere richiedono la stessa potenza
energetica dei dischi rigidi e consumano energia
anche quando il resto del sistema è spento.
HDD ad alte prestazioni richiedono generalmente tra 12-18 watt; le unità progettate
per i computer portatili in genere 2 watt.
Ma quali sono i criteri per scegliere un HDD?
Iniziamo con il visionare la scheda tecnica di un hard disk
114
4 Computer
Specifiche delle prestazioni
Velocità di rotazione
7.200 RPM (nominale)
Dimensione del buffer
32 MB
Latenza media
4,20 ms (nominale)
Cicli di carico/scarico
50.000 minimo
Velocità di trasferimento
Da buffer a host (Serial ATA)
3 Gb/s (Max)
Specifiche fisiche
Capacità formattata
1.000.236 MB
Capacità
1 TB
Interfaccia
SATA 3 Gb/s
Settori utente per l’unità
1.953.525.168
Dimensioni fisiche
Altezza
26,1 mm
Profondità
147 mm
Larghezza
101,6 mm
Peso
0,69 kg
Specifiche ambientali
Urto
Urto durante il funzionamento (lettura)
30G; 2 ms
Urto non durante il funzionamento
250G, 2 ms
Rumorosità
Modalità inattiva
24 dBA (media)
Modalità di accesso 0
33 dBA (media)
Modalità di accesso 3
29 dBA (media)
Temperatura
Funzionamento
Da – 0 °C a 60 °C
Non di funzionamento
Da – 40 °C a 70 °C
Umidità
Funzionamento
5-95% RH senza condensa
Non di funzionamento
5-95% RH senza condensa
Altitudine
Funzionamento
Da – 305 m a 3.050 m
Non di funzionamento
Da – 305 m a 12.200 m
Vibrazione
Funzionamento
0,004 g2/Hz (da 10 a 300 Hz)
Non di funzionamento
0,05 g2/Hz (da 10 a 300 Hz)
Funzionamento
Lineare
20-300 Hz, 0,75 G (0 al picco)
Casuale
0,004 g2/Hz (da 10 a 300 Hz)
Non di funzionamento
Bassa frequenza
0,05 g2/Hz (da 10 a 300 Hz)
6 Tecnologie e prestazioni dei dischi del PC
115
Alta frequenza
20-500 Hz, 4,0 G (0 al picco)
Specifiche elettriche
Corrente
12 VCC
Lettura scrittura
490 mA
Inattivo
470 mA
Standby
5 mA
Sospensione
5 mA
5 VCC
Lettura scrittura
500 mA
Inattivo
420 mA
Standby
160 mA
Sospensione
160 mA
Dissipazione di energia
Lettura scrittura
8,40 Watt
Inattivo
7,80 Watt
Standby
1,00 Watt
Sospensione
1,00 Watt
Come vedete sono riportate molte delle specifiche di cui abbiamo parlato:
ma come orientarsi nella scelta? La risposta è sempre la stessa: individuare
l’utilizzo al quale dovrà essere destinato il dispositivo. Se dobbiamo scegliere un disco per un computer destinato a un ufficio, dove saranno utilizzati prevalentemente applicativi di office automation, ci si può orientare
su hard disk con tecnologia SATA II, di capacità non eccessiva ma con una
discreta velocità di rotazione (rpm).
La scelta cambia per ambienti dove invece si utilizzano applicazioni che
usano in modo intensivo l’accesso all’hard disk come nel caso di montaggio video, rendering e CAD; in questi casi si possono compiere le seguenti
scelte, non disgiunte anche dall’aspetto economico:
•hard disk SATA III con velocità di trasferimento fino a 6 GB/s e con
elevata velocità di rotazione.
•hard disk SAS molto performanti poiché possono raggiungere 24 Gb/s,
ma con costi maggiori.
•Ipotizzare di utilizzare un hard disk primario, dove installare il sistema
operativo e gli applicativi, di tipo SSD (questi dischi hanno costi più
elevati e capacita limitata al massimo a 500 Gb), aggiungendo un Hard
disk secondario per i dati.
Anche i computer dedicati ai videogames specialmente se con grafica 3D
possono avere esigenze tipiche di una workstation grafica, ma in generale è
sufficiente orientarsi su un buon disco SATA III. Se invece pensiamo di aver
bisogno di un hard disk molto capiente perché vogliamo, per esempio, memorizzare molti files multimediali, sarà sufficiente orientarsi su un HDD
interno con caratteristiche medie (es. SATA II, 5900 rpm), ma installare
116
4 Computer
anche un HDD esterno, che funzionerà da archivio e permetterà di trasportare i dati per visionarli anche su altri computer.
Un discorso a parte fa sempre fatto per gli hard disk dedicati ai server: in
questo caso le scelte sono guidate dal costruttore che fornisce per ogni modello specifiche tipologie di dischi e spesso offre, attraverso il web, applicazioni dedicate alla configurazione del server, dove per ogni scelta effettuata
vengono filtrati i componenti installabili.
Rendering
Rendering: generazione di
un’immagine a partire da un
modello matematico.
7 Bus e connessioni
d’input/output del PC
Che cosa sono i bus?
•Un’autostrada di comunicazione che collega due o più dispositivi.
•Sono segnali elettrici raggruppati, per esempio un bus a 32 bit è composto fisicamente da 32 canali da 1 bit; il numero di bit che compongono
il bus si definisce parallelismo o larghezza.
Vantaggi
•Un’unica serie di segnali utilizzati per collegare molti dispositivi
•Tale architettura della comunicazione facilita l’aggiunta di nuovi dispositivi
•I dispositivi possono essere utilizzati tra sistemi diversi che impiegano
lo stesso bus
Svantaggi
•Si crea un collo di bottiglia nella comunicazione tra dispositivi
•La velocità del bus è determinata dalla lunghezza del circuito elettrico,
dal numero dei dispositivi connessi e dalle prestazioni dei singoli dispositivi che lo utilizzano.
Un generico bus di un computer è diviso in tre parti funzionali:
•Dati (data bus), sul quale transitano le informazioni; bidirezionale è
fruibile da tutti i componenti del sistema, sia in scrittura sia in lettura;
la sua larghezza è un fattore chiave per le prestazioni.
•Indirizzi (address bus), sul quale transitano gli indirizzi delle periferiche e delle celle di memoria dove andare a scrivere o a leggere le informazioni; monodirezionale è fruibile in scrittura solo dalla CPU e in
lettura dagli altri componenti; la sua larghezza determina la capacità di
memoria
•Controlli (control bus), il cui scopo è coordinare le attività del sistema;
tramite esso, per esempio, la CPU può decidere quale componente deve
accedere al bus dati in un determinato momento, quale indirizzo leggere
sul bus indirizzi ecc. (la memoria e tutti gli altri componenti comunicano con la CPU attraverso un bus condiviso: senza un controllo si
verrebbero a creare conflitti e/o collisioni di dati).
7 Bus e connessioni d’input/output del PC
117
Nella realizzazione delle architetture a bus sono utilizzate diverse tipologie di bus:
•Bus processore-memoria (bus interno), caratterizzato da interconnessioni
elettriche corte, ad alta velocità di trasferimento, ottimizzato per i trasferimenti di blocchi di dati nella memoria cache (Northbridge / Southbridge)
•Bus Backplane (bus esterno – standard), unico standard per differenti
dispositivi; bus che permette la coesistenza di memorie, processori e sistemi di input/output (es. PCI, SCSI)
•Bus Input-Output (bus esterno – standard industriale) si collega al bus
memoria-processore o al backplane; solitamente questo bus è più lento
a causa di connessioni elettriche più estese e alla capacità di indirizzare
numerosi dispositivi spesso molto diversi tra loro (USB, Firewire, ecc.)
Attraverso le tipologie dei bus utilizzate, sono definite le architetture di elaborazione che possono essere:
Singolo bus: in questo caso un solo bus è utilizzato per tutte le comunicazioni;
questa soluzione risulta economica ma sicuramente svantaggiosa per le comunicazioni processore-memoria. I primi computer erano dotati di un unico bus
esterno (bus di sistema), che collegava CPU, memoria e unità di I/O
Backplane BUS
CPU
Memoria
Dispositivi I/O
Figura 20
BACKPLANE BUS.
Doppio Bus: con un bus ad alta velocità di tipo processore-memoria e un
bus I/O dedicato ai dispositivi di input e output. I computer di recente generazione sono dotati di due bus:
•bus processore-memoria, che collega CPU e unità funzionali di memoria (banchi di memoria);
•bus I/O che collega CPU e unità funzionali di Input/Output.
BUS CPU – Memoria
CPU
Memoria
Adattatore Bus
I/O
BUS
Figura 21
BUS CPU-MEMORIA DOPPIO.
118
4 Computer
Adattatore Bus
I/O
BUS
Adattatore Bus
I/O
BUS
Triplo bus: dove pochi adattatori interagiscono con il bus processore-memoria e il bus I/O è connesso al backplane.
BUS CPU – Memoria
CPU
Memoria
Backside
Cache BUS
Adattatore Bus
Cache L2
Adattatore Bus
Backplane BUS
Adattatore Bus
I/O BUS
I/O BUS
Figura 22
BUS CPU-MEMORIA TRIPLO.
Un esempio di architettura a triplo bus è quella del chipset dei processori
Pentium.
Tipi di bus locali
Da quando esistono i personal computer, il �bus ha subito una continua
evoluzione. Di seguito sono riportate le caratteristiche dei �bus locali più
diffusi.
PCI
Il bus PCI è stato introdotto nel 1993; PCI sta per Peripheral component
interconnect e rappresenta un �bus, inizialmente a 32 bit, in grado di gestire
la configurazione automatica delle risorse.
PCI Express
PCI Express successore del PCI, introduce una comunicazione seriale e un
insieme di alloggiamenti differenti, in base al numero di «corsie» (lane)
previste.
In pratica, l’alloggiamento di un �bus PCI Express può essere relativamente
corto per il livello «x1», definito anche «low profil», aumentando la dimensione per i livelli successivi, fino al massimo di «x16». Inizialmente il �bus
PCI Express è stato introdotto nelle schede madri per consentire l’uso di
schede video grafiche con prestazioni evolute, pertanto, proprio per questa
ragione, si trova solitamente un solo alloggiamento x16.
Connessioni I/O per dispositivi interni
Per gli HDD interni e i DVD viene utilizzata l’interfaccia SATA (Serial Advanced Technology Attachment), mentre nei server insieme alle connessioni SATA sono presenti anche connessioni SAS (Serial attached SCSI).
Entrambe le interfacce si basano su comunicazione seriale, poiché la mo-
7 Bus e connessioni d’input/output del PC
119
dalità di trasmissione in parallelo non è idonea a supportare elevate frequenze, a causa dei problemi legati alle interferenze elettromagnetiche tra
i diversi fili.
SATA
Il Serial ATA è l’evoluzione dell’ATA, nato come IDE e rinominato
Parallel ATA (PATA) in seguito all’avvento del Serial ATA, in modo
da evitare ambiguità. Il Serial ATA presenta tre principali vantaggi:
maggiore velocità, cavi meno ingombranti e possibilità di hot-swap
(estrazione del disco durante il funzionamento); dalla sua apparizione
l’interfaccia SATA ha avuto notevoli sviluppi passando per le versioni
1.0, 2.0 e 3.0.
La specifica 3.0 contiene le seguenti evoluzioni dalle precedenti versioni:
•6 Gbit / s per prestazioni scalabili.
•Native Command Queuing (NCQ), che migliora la qualità del servizio
per il trasferimento di dati, specialmente per applicazioni di streaming
di contenuti digitali.
•Miglioramento delle capacità di gestione dell’alimentazione.
Inoltre, lo standard continua a sostenere distanze fino a un metro.
Tabella riassuntiva prestazioni interfacce SATA:
Tipo
Prestazioni teoriche
Prestazioni effettive
SATA 1.0
1,5 Gbit/s (192 MB/s)
1,2 Gbit/s (150 MB/s)
SATA 2.0
3 Gbit/s (384 MB/s)
2,4 Gbit/s (300 MB/s)
SATA 3.0
6 Gbit/s (768 MB/s)
4,8 Gbit/s (600 MB/s)
Osservazione Gli hard disk esterni possono essere collegati al computer, oltre che con la classica porta USB, anche tramite l’interfaccia eSATA (ExternalSATA), molto più performante.
120
4 Computer
SAS
Rappresenta il passaggio evolutivo successivo della tecnologia SCSI parallela, che è stata utilizzata per lo sviluppo di sistemi di memorizzazione classe
Server per oltre un ventennio. SAS vanta la stessa affidabilità totale della
tecnologia parallela precedente, ma è significativamente migliore in termini di prestazioni, scalabilità e compatibilità.
Specifiche tecniche del Serial Attached SCSI
Prestazioni
Trasferimento Full-duplex con l’aggregazione di 8 link su wide ports 24 Gbit/s.
3.0 Gbit/s per link nella versione introduttiva. Pianificato 6.0 Gbit/s.
Cavo esterno max 8 metri
Connettività
128 dispositivi per porta (16.384 in totale)
Compatibilità SAS-SATA
Attualmente già disponibili
Hard disk a doppia porta
Multi-initiator point-to-point
I dischi fissi SATA possono essere collegati al controller SAS, ma i dischi
SAS non possono essere collegati a un controller SATA. Nel primo caso
però i dischi SAS e SATA non possono coesistere sulla stessa porta.
I dispositivi SAS sono in grado collegarsi direttamente ad altri dispositivi
SAS e SATA utilizzando uno di questi tre metodi:
•Connettori backplane che utilizzano dei componenti denominati «expander Serial Attached SCSI» (sono componenti che agevolano la comunicazione e il cablaggio quando sono presenti un gran numero di
dispositivi SAS)
•Connettori interni disponibili direttamente sulla scheda madre
•Schede di espansione che permettono di connettere dispositivi esterni
HDD
HBA
Backplane
Figura 23
Tipologia di Connessioni SAS.
Osservazione Ma qual è la vera differenza tra Serial Attached SCSI e
Serial ATA? Serial Attached SCSI è una soluzione classe «critical server»,
che offre le prestazioni, l’affidabilità e la scalabilità richieste dalle applicazioni critiche. Serial ATA è principalmente una soluzione di classe
desktop adatta per ambienti caratterizzati da carichi di lavoro leggeri e
budget limitati.
7 Bus e connessioni d’input/output del PC
121
Titolo
L’host bus adapter (HBA), è una
scheda d’espansione che consente di connettere un computer e/o dispositivi di memorizzazione dei dati all’interno di
una rete. Generalmente, ci si
riferisce ad adattatori per porte
SCSI ed eSATA.
La seguente tabella sintetizza le differenze fra SAS e SATA
Differenze fra SAS e SATA
SAS
Identificazione dispositivo
Con WWN
In base alla porta
Riordinamento comandi
TCQ
NCQ (solo su SATA II)
Può gestire
Dischi fissi
Dischi ottici
Stampanti
Nastri Magnetici
Scanner ecc.
Dischi fissi
Dischi ottici
Multipath I/O
Si nativo
Solo su SATA II
con hardware proprietario
Tensione TX
800-1600 mV
400-600 mV
Tensione RX
275-1600 mV
325-600 mV
Lunghezza cavi
8m
1m
Titolo
World Wide Name (WWN):
identificatore univoco di un
particolare SAS; ogni WWN è
un numero di 8 byte.
Titolo
Tagged Command Queuing
(TCQ): tecnologia che permette
al sistema operativo di inviare
molteplici richieste di lettura e
scrittura al disco rigido.
SATA
Slot di espansioni
Gli slot di espansione sono tutti di tipo PCI e PCI Express e permettono di
connettere schede con funzionalità dedicate; sono collocati direttamente
sulla scheda madre e sono in numero e formato diverso.
4x
1x
16x
PCI
Figura 24
CONNETTORI PCI EXPRESS.
Particolare rilevanza hanno gli slot PCI Express 16x con prestazione elevate
e dedicate alla connessione di schede video.
Connessioni I/O per dispositivi esterni
AUDIO
ANALOGICO
PS2
AUDIO
DIGITALE
SPDIF
Figura 25
Connessioni I/O.
122
4 Computer
FIREWIRE
USB
e- SATA
LAN
PORTA PARALLELA
PORTE SERIALI
Le porte d’interfacciamento con i dispositivi esterni sono presenti direttamente sulla scheda madre o possono essere aggiunte attraverso schede dedicate inserite negli appositi slot. Alcune delle porte sopra raffigurate sono
quasi scomparse dalla dotazione standard di una scheda madre, grazie allo
sviluppo della porta USB che ha rivoluzionato completamente l’interfacciamento delle periferiche esterne.
Tra queste porte ormai in disuso ci sono:
•Le porte seriali note come RS232 che rappresentano le prime interfacce
che hanno permesso ai computer di scambiare delle informazioni con il
«mondo esterno».
•Le porte parallele che permettevano di connettere un elemento esterno
(per esempio una stampante).
•Anche le porte PS2 dedicate rispettivamente al mouse e alla tastiera
stanno pian piano scomparendo (negli ultimi modelli di schede madri
se ne trovava solamente una).
USB (Universal Serial Bus)
All’inizio degli anni ’90, il numero sempre crescente di periferiche ha fatto nascere l’esigenza di un bus più facilmente espandibile rispetto a quelli esistenti; fino allora, per collegare un nuovo dispositivo al proprio PC
c’era bisogno di un particolare cavo (periferiche come stampante, modem,
mouse avevano cavi e connettori completamente diversi) e di installare il
software che riconoscesse e configurasse il nuovo dispositivo. Per soddisfare la necessità crescente di connessioni molteplici fu introdotto il bus USB,
caratterizzato da:
•Facilità d’uso per quanto riguarda la connessione delle periferiche;
•Un solo tipo di cavo e di porta per qualsiasi genere di periferica;
•Possibilità di attaccare periferiche diverse alla stessa porta;
•Risoluzione automatica dei conflitti;
•Connessione «a caldo» dei dispositivi;
•Rilevazione e configurazione automatica delle periferiche;
•Compatibilità con tutte le configurazioni e tutti i costruttori;
•Basso costo sia dal lato PC che dal lato periferica;
•Bassi consumi;
Titolo
«a caldo» significa «quando il
pc è in funzione».
L’architettura USB ha come caratteristica quella di fornire direttamente
l’alimentazione elettrica alle periferiche che collega e di avere un bus molto
complesso sia dal lato host (il PC) che dal lato periferica:
•l’host interviene infatti in ogni operazione di comunicazione e deve essere in grado di capire che tipo di periferica è stata collegata e riconoscerne la connessione e la disconnessione;
•le periferiche, invece, devono avere un microcontrollore che gestisca le
comunicazioni attraverso l’implementazione dei protocolli necessari al
funzionamento del sistema connesso (driver di periferica).
Parte fondamentale nella realizzazione dell’interfaccia USB sono gli hub,
particolari dispositivi con la funzione di replicare il collegamento al bus
realizzando una struttura ad albero, come qui di seguito illustrato:
7 Bus e connessioni d’input/output del PC
123
Host USB
Monitor con porte USB
HUB USB
HD esterno
Scanner
Stampante
Telefono
Fotocamera Digitale
Figura 26
esempio
USB.
Nei personal computer sono disponibili più porte
USB ottenute attraverso un hub integrato che moltiplica il collegamento; se per esempio colleghiamo un
hub a 6 porte a una connessione USB, le periferiche
che possiamo collegare aumentano di numero (por-
te disponibili + 6 porte del nostro hub – 1 porta per
la connessione dell’hub stesso). L’hub, come tutte le
periferiche, ha un controllore per riconoscere su quali
porte sono collegati i dispositivi, in modo da comunicarlo all’host quando questo lo interroga.
Grazie a questa struttura ad albero si possono collegare fino a 127 periferiche sul bus; con l’aumentare del numero di periferiche le prestazioni
si riducono, poiché le risorse disponibili, in particolare la banda passante,
cioè la quantità di informazione trasmissibile sul canale di comunicazione,
devono essere distribuite fra le diverse periferiche.
Il �bus USB ha un collegamento speciale, attraverso connettori di tipo differente, a seconda che si tratti del lato rivolto verso l’unità periferica oppure
verso l’host.
Nel corso della sua evoluzione l’interfaccia USB ha migliorato notevolmente l’affidabilità e la velocità; nella tabella sono riassunte le prestazioni delle
diverse versioni:
124
4 Computer
Tipo
Prestazioni
USB 1.0
1,5 Mbit/s (192 KB/s)
USB 1.1
12 Mbit/s (1,5 MB/s)
USB 2.0
480 Mbit/s (60 MB/s)
USB 3.0
4,8 Gbit/s (600 MB/s)
FireWire (IEEE 1394)
Il bus IEEE 1394, è stato messo a punto per fornire un sistema di interconnessione che permette di trasferire dati ad alta velocità in tempo reale. La
società Apple gli ha attribuito il nome commerciale «Firewire», che è diventato il più diffuso, Sony gli ha dato anche il nome commerciale di i.Link,
mentre Texas Instrument gli ha preferito il nome di Lynx. Si tratta di una
porta che permette di connettere periferiche ad alta capacità (per esempio
le videocamere digitali). È importante sapere che i cavi non possono avere
lunghezza superiore a 4,5 mt.
Osservazione Questo bus mostra molte similitudini con l’USB (è un
bus seriale, permette connessioni a caldo e creazione di strutture ad albero) ma con alcune ragguardevoli differenze
(maggiori prestazioni e maggiori costi e protocolli simili al bus SCSI).
Figura 27
FIREWIRE.
Il
setup dell’hardware del PC
8
La gestione e il setup iniziale dell’hardware, sia esso integrato, collegato alla
scheda madre attraverso connettori dedicati (processore, RAM, HDD ecc.)
o inserito tramite schede specializzate sugli slot di espansione, è eseguita
dal BIOS (Basic Input/Output System – sistema base di controllo ingressi
8 Il setup dell’hardware del PC
125
e uscite); il BIOS è un programma memorizzato direttamente (firmware)
in un chip della scheda madre. Quando il PC è avviato, il BIOS dapprima
identifica i componenti hardware e successivamente effettua un test, detto
POST (Power-On Self Test) per verificarne il corretto funzionamento.
Se sono riscontrati errori, il BIOS cercherà comunque di continuare l’avvio
del computer e solo se l’errore è grave, bloccherà il sistema. In questo caso
provvederà comunque a:
•visualizzare un messaggio sullo schermo (ovviamente questo non accadrà se l’hardware di visualizzazione deve essere ancora inizializzato
oppure è difettoso);
•emettere un segnale sonoro, di solo attraverso una sequenza di bip, che
indentifica il guasto (in questo caso potremo, attraverso il manuale della
scheda madre, risalire all’errore dal numero di bip);
Registro
Il termine «boot loader» deriva dal fatto che il processo di
avvio del computer è chiamato
bootstrap.
Se il test va invece a buon fine, il BIOS emette generalmente un breve bip,
segnalando l’assenza di errori e a seguire individua tra i suoi dati, la sequenza dei dispositivi dove cercare il «boot loader» (per esempio un disco
rigido o un CD/DVD), il programma che carica ed esegue il sistema operativo, passando a quest’ultimo il controllo del PC.
I principali costruttori del BIOS sono:
•American Megatrends: produttrice di AMI BIOS;
•Award Software (ora parte di Phoenix Technologies): produttore di
Award BIOS
•Phoenix Technologies: produttore di Phoenix BIOS
Il contenuto del chip BIOS può essere totalmente riscritto e questo consente di poter aggiornare il firmware del BIOS con le nuove release rilasciate
dal produttore; quest’operazione va eseguita con molta cautela e dopo aver
letto attentamente il manuale della scheda madre dove è indicata la procedura per eseguire tale attività.
Osservazione Il firmware è un programma, inteso come sequenza
d’istruzioni, integrato direttamente in un componente elettronico. Lo
scopo del programma è di avviare il componente stesso e consentirgli di
interagire con altri dispositivi tramite l’implementazione di protocolli di
comunicazione o interfacce di programmazione.
Tutti i parametri di default, cioè i parametri immessi dal costruttore, sono
configurati in modo tale che qualsiasi computer utilizzi il BIOS funzioni correttamente, ma è permesso all’utente di cambiare alcune opzioni di
configurazione. Consigliamo di munirsi, prima di sperimentare qualsiasi
modifica al nostro BIOS, del manuale della scheda madre dove sono riportate le possibili scelte relative a tutte le funzionalità gestite dal BIOS.
Come si accede al programma di configurazione del BIOS (setup)
Il programma di configurazione del BIOS è accessibile nella prima fase di
avvio, durante il controllo della RAM; in questa fase è visualizzata la schermata del costruttore del BIOS ed è indicato come entrare nel menu del
programma di configurazione: da questa schermata basta di solito preme126
4 Computer
re ripetutamente, assolutamente prima che la schermata scompaia, il tasto
«Canc» o «F1» o «F2» o «F10», secondo il tipo di BIOS e la marca del PC, e
si entrerà nelle utility di setup.
Osservazione Come identificare il BIOS del proprio computer? Oltre al nome del costruttore e ai codici di riferimento nella schermata
di «boot», esistono altri modi di identificare il tipo di BIOS del proprio
computer; utilizzando strumenti del sistema operativo installato (per
esempio con Windows è possibile identificare il tipo di BIOS utilizzando il programma regedit dal prompt dei comandi e digitando la parola
BIOS), oppure utilizzando programmi di identificazione della scheda
madre reperibili su internet.
Una volta entrati nel programma di setup, ci troveremo di fronte a una
schermata con diversi menu. L’interfaccia di gestione può essere di tipo
testuale o con interfaccia grafica, come illustrato in queste immagini di
esempio:
Per la navigazione all’interno dei menu del setup, nel caso della versione
grafica sarà possibile utilizzare il mouse mentre per la versione testuale si
dovranno utilizzare i tasti.
Tasto di navigazione
Descrizione
!/"
Spostare il cursore a sinistra o a destra per selezionare le Schermate
#/$
Sposta il cursore su o giù per selezionare le voci
+ / – oppure PagUp / PagDn
Per modificare l’opzione per gli elementi selezionati
<Invio>
Per visualizzare la schermata di selezione. A volte serve anche per vedere tutte le voci disponibili per un determinato valore
<F1>
Per visualizzare la schermata d’aiuto
<F9>
Per caricare i valori di default ottimali per tutte le impostazioni
<F10>
Per salvare le modifiche e uscire dal BIOS Setup Utility
<ESC>
Per passare alla schermata di uscita o uscire dalla schermata corrente
In ogni setup di tipo testuale è comunque presente, generalmente sul lato
destro, l’elenco dei tasti funzione.
Le pagine messe a disposizione nel programma di setup dipendono sia
dal costruttore del BIOS sia dal modello della scheda madre; senza entrare quindi nel dettaglio delle singole schermate, vogliamo di seguito
8 Il setup dell’hardware del PC
127
fornire alcuni parametri, disponibili su tutti i sistemi, che riteniamo
utili per l’utente: sarà così più facile individuarli, con l’ausilio del manuale della scheda madre, tra le pagine della propria utility di gestione
del BIOS.
Osservazione Una volta entrati nel programma di configurazione si
trovano già impostati i valori consigliati, decisi in automatico dal BIOS
dopo aver riconosciuto l’hardware installato: le possibili alternative sono
predefinite e tra queste è spesso presente l’opzione «AUTO» che significa
che i valori verranno definiti in automatico in fase di avvio del sistema,
subito dopo il riconoscimento dell’hardware.
Attraverso l’interfaccia utente del BIOS, si possono:
•Recuperare informazioni quali la versione del BIOS, la tipologia di processore, la quantità e il tipo di memoria RAM installata, ecc.
•Impostare l’orologio di sistema (data e ora del sistema).
•Configurare parametri hardware quali:
•Parametri della CPU come per esempio l’Hyper-Threading Technology (naturalmente questo parametro è disponibile per essere «abilitato» soltanto se supportato dal processore individuato).
•Parametri del chipset quali le frequenze dei bus interni, delle DDR,
delle PCI ecc.
•Configurare le interfacce dei dischi per indicare le modalità di funzionamento delle connessioni SATA:
•Impostare su AHCI se si vuole che i dischi Serial ATA utilizzino la
tecnologia Advanced Host Controller Interface, grazie alla quale potranno sfruttare le caratteristiche avanzate che consentono di migliorare le prestazioni del disco.
•Impostate su RAID, se previsto, opzione che come abbiamo visto
permette l’utilizzazione di più dischi per garantire l’integrità dei
dati.
•Attivare o disattivare dispositivi integrati nel sistema come schede video, audio ecc..
•Impostare il monitoraggio delle componenti del sistema: è possibile
monitorare lo stato dei componenti hardware, inclusa la temperatura
della CPU, la temperatura della scheda madre, la CPU fanspeed (velocità delle ventole) e la tensione critica.
•Selezionare quali dispositivi sono idonei a essere un dispositivo di avvio (boot); questa opzione permette di impostare l’ordine di avvio delle
unità, cioè l’ordine delle periferiche nelle quali cercare il boot loader e
caricare il Sistema Operativo.
•Gestire la sicurezza del sistema impostando diverse password, come per
esempio una password per permettere l’accesso alle funzioni del setup
oppure per permettere l’avvio del sistema stesso.
•Caricare la configurazione ottimale: tra le funzionalità del programma
di setup, c’è anche quella di ricaricare i valori di default, che assicurano
il corretto funzionamento del sistema.
128
4 Computer
9 Laboratorio: smontare e
rimontare un PC
Un personal computer è costituito da alcuni componenti indispensabili e
da alcuni altri opzionali: oltre al video, alla tastiera e al mouse, periferiche
esterne di I/O indispensabili, quasi tutti gli altri componenti sono contenuti all’interno del case o chassis (letteralmente «scatola»). Esistono diversi
tipi di case, secondo le dimensioni dell’hardware che devono contenere, ma
tutti hanno una caratteristica comune: costituiscono il telaio che meccanicamente sostiene la componentistica. I tipi di case più utilizzati sono quelli
definiti «tower» (mini, middle, full ecc. secondo le dimensioni).
Che cosa contiene?
•l’alimentatore
•la scheda madre
•il processore
•il dissipatore
•la memoria RAM
•le periferiche per l’archiviazione dei dati (hard disk, lettori CD/DVD
ecc.)
•la scheda video (talvolta integrata)
•slot PCI (per modem interno, schede di rete, schede sonore, schede tv ecc.)
•porte PS2 per mouse e tastiera
•porte USB
•interfaccia Ethernet
•cavi e connettori
Proviamo a smontarlo
Smontare un PC è relativamente semplice e questo vale anche per quanto
riguarda la strumentazione necessaria:
•dei guanti di plastica (quelli in lattice usa e getta vanno benissimo): impediscono che l’elettricità statica accumulatasi danneggi i componenti
9 Laboratorio: smontare e rimontare un PC
129
ed evitano che possano essere trasferiti residui presenti sulle mani, come
sudore, grasso ecc., che possono impedire il regolare flusso dell’elettricità all’interno dei componenti;
•un cacciavite a stella: tutte le viti con cui avremo a che fare sono a stella;
•delle pinze per rimuovere le viti se si dovessero incastrare.
È anche necessario avere a disposizione il manuale della scheda madre e
possibilmente i manuali dell’hardware installato.
La prima operazione e quella di accertarsi di aver scollegato il cavo di alimentazione del pc: mi raccomando, è fondamentale sia per la nostra sicurezza, sia per evitare danni alla componentistica.
Come aprire il case? Normalmente sono presenti delle viti nella parte posteriore che fissano il pannello laterale (che è quello che si smonterà) e che
andranno rimosse con il cacciavite a stella. Dopo andrà spostato il pannello
verso il retro del case, facendolo scorrere fuori dalle guide nelle quali è alloggiato. In alcuni case il pannello non è fissato con delle viti e può essere
rimosso semplicemente sganciandolo.
L’alimentatore
Il primo componente da smontare è l’alimentatore chiamato anche PSU
(Power Supply Unit – unità che fornisce potenza), che nei vecchi case era
di norma collocato nell’angolo in alto a sinistra (guardando il case aperto
lateralmente) e nei nuovi è invece collocato in basso. L’alimentatore trasforma la corrente alternata in corrente continua, evitando così gli sbalzi di
tensione: la potenza che eroga permette di dare corrente a tutti i dispositivi collegati al PC. Esistono alimentatori capaci di erogare diverse potenze:
350, 400 o 450 watt sono le potenze più comuni. Prima di rimuoverlo è ne130
4 Computer
cessario scollegare tutti i connettori che alimentano i dispositivi contenuti
all’interno del case e che normalmente sono:
•il cavo di alimentazione per la scheda madre
•il cavo di potenza ausiliario
•il cavo per periferiche SATA (o ParallelATA)
Questi cavi sono inseriti nelle apposite prese nel retro delle periferiche o
sulla scheda madre, tramite spinotti che hanno un unico verso di inserimento.
Osservazione Gli HDD, abbiamo visto, hanno adottato l’interfaccia
SATA: la cavetteria di tipo SATA è dotata di un minor ingombro rispetto
alle «piattine» tipiche dei dispositivi ParallelATA (IDE). Comunque i cavi
molex (a 4 pin lineari), sono tutt’ora usati negli adattatori SATA--->IDE
di alimentazione.
Osservazione Gli alimentatori possono essere di vari tipi ma sono
sempre muniti di ventole di raffreddamento e presa per il cavo di alimentazione esterno. Lo standard è l’ATX (automatico, lo spegnimento
del computer avviene automaticamente al termine del processo software); Intel ha varato dal 2004 lo standard BTX.
Le periferiche per l’archiviazione dei dati
I successivi pezzi che smonteremo nel nostro PC saranno i drive CD/DVD
e l’hard-disk. Abbiamo trattato le caratteristiche di questi dispositivi nei
paragrafi precedenti: qui ci limiteremo quindi a descrivere le manovre da
compiere per procedere al loro corretto smontaggio.
Osservazione Non sempre è possibile smontare per primi tali componenti: se sulla scheda madre sono montate schede aggiuntive (video,
audio ecc.), queste possono occupare molto spazio nel case e questo potrebbe rendere impossibile la fuoriuscita dei drive o dell’hard disk dagli
appositi alloggiamenti (denominate «baie») nei quali sono collocati; in
questo caso, si deve prima procedere alla rimozione delle schede che impediscono lo smontaggio delle periferiche di archiviazione dei dati.
Cominciamo con i drive CD/DVD. La procedura da eseguire è molto semplice: il primo passo è togliere le viti che fissano la periferica sulla struttura
metallica di sostegno dello slot che la ospita, che è quello utilizzato per le
periferiche che richiedono lo sbocco sull’esterno. I case infatti possiedono
un certo numero di baie dotate di uno sbocco sul pannello frontale del case
stesso. Queste baie possono essere da 5,25" (pollici) per drive CD/DVD o
da 3,5 per i lettori di schede di memoria. Fatto questo, dobbiamo scollegare
il cavo SATA (o PATA) che va alla scheda madre e che permette il trasferimento dei dati dalla periferica all’unità centrale. Nei lettori di schede di
memoria si trova un analogo cavo di connessione. Di norma questo tipo
di periferiche devono essere sfilate direttamente dall’esterno (attenzione!
su alcuni case è necessario invece sfilarle dall’interno). Per l’hard-disk che
9 Laboratorio: smontare e rimontare un PC
131
invece non ha sbocchi esterni la procedura da seguire è la stessa descritta
per i drive CD/DVD (in realtà anche la baia che ospita questa periferica ha
uno sbocco esterno che però è coperto da una mascherina posta sul pannello frontale).
Osservazione Ricordate che i cavi ParallelATA (IDE) hanno tre connettori neri, due alle estremità e uno in mezzo al cavo, che presentano
due file di fori. Alla scheda madre è attaccato uno dei due connettori che
si trovano alle estremità, mentre gli altri sono collegati alla periferica. Il
connettore che si trova all’estremità opposta rispetto a quello che si è inserito nella scheda madre è detto master, l’altro (che sta in mezzo ai due)
è detto slave. Di norma il connettore master è collegato all’hard-disk e
quello slave al drive CD/DVD. Per le periferiche SATA invece a ogni connettore si può collegare una sola periferica.
La scheda video
Prima di cominciare a smontare le schede conviene appoggiare il case di fianco in modo da eseguire l’operazione nel modo più facile possibile. La scheda
video può essere «integrata», cioè essere presente sulla scheda madre sotto
forma di chip, o «discreta» ossia come componente autonomo; nel primo
caso ovviamente non dobbiamo smontarla, nella seconda eventualità invece,
è montata su uno degli slot della scheda madre, in particolare lo slot AGP (se
parliamo di schede di qualche anno fa) o sullo slot PCI-Express x16.
132
4 Computer
Lo smontaggio in tutti i tipi di slot è molto semplice e uguale per qualsiasi
tipo di scheda. Per prima cosa, dovrete liberare la scheda dalle viti che la fissano alla lamiera del case; talvolta non sono presenti viti, ma delle leve particolari che vanno semplicemente sganciate. L’ultima operazione da compiere e
quella di sganciare la scheda dallo slot nella quale è inserita, premendo verso
l’esterno su un apposito pulsantino presente sulla destra dello slot stesso. Lo
slot ha un taglio che fa in modo che la scheda si possa inserire solo in un verso. Se è stata correttamente montata, la scheda deve uscire senza incontrare
eccessive resistenze: in ogni caso è sempre meglio estrarla con delicatezza!
Osservazione Esistono schede video particolarmente potenti e voluminose, dette dual-slot, che pur collegandosi alla scheda madre su un solo
slot, ne occupano due e richiedono più energia di quella fornita dal solo
slot PCI-Express per funzionare: su queste schede è presente una o addirittura due prese elettrica da collegare direttamente all’alimentatore. Per alimentare tali schede, l’alimentatore dovrà essere particolarmente potente!
Le schede aggiuntive
Le schede aggiuntive (schede di rete, schede sonore, schede tv ecc.), possono essere «integrate» o «discrete». In quest’ultimo caso, sono inserite negli
slot PCI o PCI Express della scheda madre e la procedura per smontarle è
la stessa descritta per la scheda video.
9 Laboratorio: smontare e rimontare un PC
133
Titolo
I «notch» possono essere anche multipli e gli spazi che delimitano, alla loro destra o sinistra, hanno lunghezze diverse
tra di loro; inoltre le proporzioni
tra di esse cambiano secondo
il tipo di RAM montata.
La memoria RAM
Anche di questi componenti abbiamo trattato le caratteristiche nei paragrafi precedenti: descriveremo quindi solo le manovre da compiere per
procedere al loro corretto smontaggio.
Gli slot per la memoria sono adiacenti a quello della CPU. Solitamente sono
quattro, tranne che per alcune motherboard, che offrono il supporto sia per
DDR2 che DDR3. L’alloggiamento disposto per accogliere i banchi di memoria RAM è una striscia colorata, formata da connettori femmina, situata
generalmente di lato al socket del processore. Al bordo dei connettori per i
moduli RAM sono presenti dei ganci di plastica che bloccano le memorie.
Per smontare i moduli di memoria dobbiamo sbloccare questi ganci, spostandoli lateralmente. Basta quindi togliere il modulo dal connettore, sfilandolo nelle guide poste ai lati e il gioco è fatto. Prima di toglierlo del tutto
però fate attenzione all’orientamento del modulo, individuando il cosiddetto
notch o encoche, un punto d’interruzione nei contatti sulla parte inferiore
del modulo: esso combacia perfettamente nell’incastro con l’alloggiamento
(questo sarà molto utile quando dovremo a rimontare i moduli RAM).
Il processore (CPU) e il dissipatore di calore
La CPU è il cervello del computer e su di esso troviamo montato il dissipatore di calore, il dispositivo che raffredda il processore: se non ci fosse, il processore si surriscalderebbe immediatamente, bruciando entro pochi secondi.
134
4 Computer
Il dissipatore è composto di una ventola circondata da una struttura metallica che può essere di diversi tipi di metallo e avere diverse forme. La ventola,
azionata da un motorino, sposta l’aria indirizzandola sulla superficie metallica del dissipatore con l’obiettivo di raffreddarla. Più aria arriverà sulla superficie del dissipatore, maggiore sarà il potenziale di raffreddamento. Individuiamo quindi il cavo di alimentazione per il dissipatore e scolleghiamolo
dalla scheda madre (talvolta è segnalato dalla scritta CPU FUN). La modalità
con la quale il dissipatore è fissato al socket del processore, varia a seconda del
tipo di socket montato dalla scheda madre: di solito il fissaggio avviene grazie
a perni o viti inseriti nelle apposite fessure poste intorno al socket stesso.
Una volta smontato il dissipatore, vedrete che sulla destra del socket è presente una levetta: sollevandola si può rimuovete il chip della CPU (quando rimonterete il processore basterà abbassare questa leva per bloccarlo in
sede). Esistono due diversi tipi di socket:
•il PGA (Pin Gated Array) nel quale i piedini bloccano il microprocessore allo zoccolo. In pratica è il processore a essere provvisto di piedini
(pins) nella parte inferiore: sfilando con delicatezza tutti i piedini si rimuove il chip della CPU.
•Il LGA (Land Grid Array) nel quale la CPU deve essere bloccata in una
piastra di pins. In questo caso è il socket che è provvisto di piedini ed è
anche dotato di una specie di gabbia che serve a bloccare in sede la CPU.
Osservazione Tra il dissipatore e il processore è presente una pasta termoconduttiva o pasta termica: è una pasta caratterizzata da un’elevata conducibilità termica. La sua funzione consiste nell’evitare che rimanga aria tra
la superficie della CPU e la base del dissipatore, aumentando così l’efficienza
di trasferimento del calore e quindi il raffreddamento. Spalmare la superficie
del processore con della pasta termica è molto importante, tuttavia bisogna
porre molta attenzione nel farlo, assicurandosi di non sporcare altri componenti e di non metterne troppa: il rischio è di ottenere l’effetto contrario!
La scheda madre (motherboard)
Una volta smontati tutti i componenti precedentemente descritti, rimane
solo la scheda madre. Su di essa abbiamo visto trovano alloggiamento il processore, la memoria, la scheda video e le varie schede PCI; vi trova posto la
9 Laboratorio: smontare e rimontare un PC
135
circuiteria elettronica di interfaccia fra i vari componenti principali, il Northbridge e il Southbridge, le porte PS2, le porte USB, l’interfaccia Ethernet, il
chip del BIOS e una batteria al litio in grado di alimentare per anni l’orologio
di sistema. Ecco l’immagine, nei particolari, di una scheda madre:
Osservazione Ricordiamo che la scheda madre è composta di un circuito stampato molto complesso, ricavato da un sandwich di strati di
vetronite e rame: generalmente una scheda madre può avere da quattro
a sei strati di rame. In questi sono ricavate le piste che collegano i vari
componenti. Su questo circuito stampato sono saldati una serie di circuiti integrati. L’insieme dei componenti integrati nella scheda madre
viene chiamato chipset. Gli standard più diffusi sono l’ATX (Advanced
Technology Extended) e il BTX (Balanced Technology Extended).
Prima di togliere la scheda madre bisogna staccare i cavi che la collegano al
pannello frontale del case (pulsante di accensione, pulsante di reset, speaker di sistema, led d’accensione e di utilizzo hard-disk, porte USB frontali,
audio frontale ecc.). Per smontare la scheda madre bisogna togliere le viti
che la fissano al case, avendo cura di prenderla solo dai bordi, evitando così
di toccare i circuiti, per appoggiarla poi su di un tappetino antistatico.
Osservazione Abbiamo visto come smontare un PC, ma per rimontarlo? È molto semplice: per rimontare il PC basta ripetere a ritroso le operazioni svolte, ponendo attenzione a orientare in maniera corretta tutti i
componenti; come abbiamo visto in alcuni casi un solo verso è possibile,
mentre in altri bisogna porre attenzioni a particolari «segni» di riconoscimento che permettono il posizionamento corretto dei componenti.
Cavi e connettori
Molex femmina a 4 pin: è utilizzato per l’alimentazione di tutte le periferiche ParallelATA (lettori CD/DVD, hard-disk e molte ventole opzionali per
il case). Si può inserire in un solo verso.
136
4 Computer
Cavo SATA di alimentazione: facilmente riconoscibile per la grossa scritta
SATA sulla sua faccia superiore; ha la disposizione dei contatti elettrici a
forma di L, che ne obbligano l’orientamento.
Scheda madre. Ci sono due prese dedicate all’alimentazione: una da 4 pin
(principale), situata nella zona circostante il socket del processore e una da
20/24 pin (ausiliaria). Per orientare gli spinotti basta mettere le due estroflessioni dell’incastro, quella sullo spinotto e quella sulla presa della scheda
madre, dalla stessa parte.
Connettore SATA: i pin sono disposti a forma di L e questo lo rende facilmente orientabile. Normalmente è rosa o colorato vivacemente.
Titolo
Vi sono infine i cavi del pannello frontale del
case che variano da case a case: quelli comuni
sono il pulsante di accensione, il pulsante di
reset (riavvio), lo speaker (beeper) di sistema, i
led dell’accensione e di utilizzo hard-disk; opzionali quelli per le porte USB frontali, la porta
firewire frontale, e l’audio frontale. È consigliabile seguire le istruzioni riportate sul manuale
della scheda madre per collegare correttamente questi cavi.
9 Laboratorio: smontare e rimontare un PC
I lettori di memorie vanno collegati con l’apposito spinotto
USB ai pin della scheda madre
dedicati all’interfaccia USB,
dalla quale traggono direttamente l’energia.
137
Sintesi
Lo schema ideato da John Von Neumann
al termine della seconda guerra mondiale ancora
oggi è il progetto logico dell’architettura del computer moderno e anche se i computer attuali hanno una struttura più complessa della macchina
di von Neumann il principio di funzionamento è
esattamente lo stesso.
La macchina di Von Neumann prevede 5
componenti fondamentali: un’unità per l’inserimento di dati e istruzioni (input), un’unità per
memorizzare i dati (RAM), un’unità per elaborare
i dati (CPU), un’unità per comunicare i risultati
(output) e un canale che collega tra loro le varie
unità per lo scambio dei dati (bus).
La CPU è composta dall’unità di controllo
(CU – Control Unit), che governa la sequenza delle
operazioni, in modo che queste vengano eseguite
in maniera corretta, e dall’unità aritmetico-logica
(ALU, Arithmetic-Logic Unit), che svolge le operazioni logiche e aritmetiche.
I computer possono essere classificati per
la specificità di utilizzo (uso generale – «general
purpose» – o uso specifico – «special purpose»),
oppure per la potenza di calcolo, la capacità di archiviazione dei dati e le dimensioni (SuperComputer, Mainframe, Minicomputer, Microcomputer).
Il personal computer nasce con la creazione
dei microprocessori alla fine degli anni ’70 del secolo scorso e si impone come paradigma del computer, diventando nel corso degli anni il modello di
riferimento da cui sono derivati l’ampia gamma di
prodotti oggi in commercio (Workstation, Laptop,
Network PC, Netbook, Tablet PC, PDA).
Tutti i componenti di base necessari per il
funzionamento del computer si incontrano in un
elemento chiamato scheda madre (in inglese «motherboard»), che è un complesso circuito stampato
multistrato adibito alla installazione fisica di detti
componenti tramite una serie di connettori (slot e
socket).
Le caratteristiche che differenziano i diversi tipi di schede madri sono: il fattore forma, il
tipo di supporto del processore (socket), il chipset,
138
4 Computer
il numero dei connettori di memoria RAM, il chip
del BIOS, il numero di slot dedicati alle periferiche interne e la loro tecnologia (SATA, SAS ecc.), il
numero e la tecnologia degli slot di espansione e il
numero e il tipo di connettori di entrata-uscita.
La scheda madre, una volta installati i componenti hardware, provvede a metterli in comunicazione tra loro e a gestire tutte le comunicazioni
con le periferiche esterne.
Il processore o microprocessore (CPU –
Central Processing Unit) è il cervello del computer.
Esso permette di manipolare le informazioni codificate sotto forma binaria e di eseguire le istruzioni
registrate nella memoria.
Un microprocessore è costituito da un core
(anima), inserito in un package (imballaggio) di
ceramica, contenente milioni di transistor che costituiscono la parte funzionale della CPU.
Il processore esegue le istruzioni seguendo
il ritmo scandito dalla frequenza del clock (l’orologio di sistema che invia gli impulsi). La frequenza
del clock (detta anche ciclo) corrisponde al numero d’impulsi inviati in un secondo ed è espressa in
Hertz (Hz).
Il set di istruzioni è l’insieme delle operazioni elementari che un processore può compiere.
Il set di istruzioni di un processore determina la
sua architettura.
Le principali architetture dei processori
sono l’architettura CISC (Complex Instruction
Set Computer) e l’architettura RISC (Reduced Instruction Set Computer).
La corsa all’aumento della frequenza di
clock delle CPU si è fermata e si è passati a uno sviluppare una tecnologia «orizzontale» che consiste
nell’integrare nello stesso package due o più core
gemelli che condividono le varie risorse della CPU
stessa (cache, bus, registri).
La memoria suddivisa in memoria primaria (detta anche memoria centrale o memoria volatile), che permette di memorizzare temporaneamente i dati durante l’esecuzione dei programmi
e la memoria secondaria (detta anche memoria
permanente o memoria di massa), che permette di
registrare delle informazioni a lungo termine, conservandole anche quando il computer è spento.
Le principali caratteristiche di una memoria sono la capacità, che rappresenta il volume
globale delle informazioni che la memoria può
contenere e il tempo di accesso, che corrisponde
all’intervallo di tempo tra la richiesta di lettura/
scrittura e la disponibilità del dato.
La memoria primaria si suddivide in due
grandi famiglie la memoria ROM (Read Only Memory) e la memoria RAM Random Access Memory)
L’architettura delle memorie corrisponde a
una matrice nella quale a ogni intersezione di riga
e colonna vi è una cella di memoria in cui è scritto
un bit; si accede a una cella di memoria attraverso
un indirizzo del tipo [riga,colonna]
La memoria ROM è una memoria a sola
lettura. L’acronimo ROM è tuttavia utilizzato anche per identificare memorie che possono essere
cancellate e riprogrammate tramite processi particolari (PROM, EPROM, EEPROM).
Le memorie RAM si suddividono in RAM
dinamiche (DRAM) e RAM statiche (SRAM).
Esistono diverse tipologie di DRAM con
velocità di trasferimento dati diverse: DDR, DDR2
e DDR3.
Un disco rigido (HDD, anche disco fisso
o hard disk) è un dispositivo di archiviazione dati
non-volatile, digitale, ad accesso casuale che utilizza tecnologia magnetica per registrare i dati.
Fisicamente l’HDD è costituito da piatti in
alluminio, ceramica o vetro, ricoperti da materiale
ferromagnetico sovrapposti e montati su un perno
in rotazione; su ogni piatto è presente una testina
per accedere in scrittura o in lettura ai dati memorizzati sul piatto.
I dati sono memorizzati su disco seguendo uno schema di allocazione fisica ben definito
in base al quale si può raggiungere la zona dove
leggere/scrivere i dati sul disco; gli schemi utilizzati
sono il formato LBA (Logical block addressing –
indirizzamento logico a blocchi) e il formato CHS
(Cylinder/Head/Sector – Cilindro/Testina/Settore).
Le caratteristiche principali di un disco rigido sono la capacità (espressa in GB o TB), il tempo di accesso (legato alla natura meccanica delle
testine e alla rotazione dei dischi) e la velocità di
trasferimento (legata alla velocità di rotazione e
alla densità di memorizzazione).
Negli ultimi anni si è assistito all’introduzioni di dischi allo stato solido o drive a stato
solido, denominati SSD (Solid-State Drive), che
utilizzano la memoria flash per l’archiviazione dei
dati.
Tutti gli elementi che costituiscono il computer colloquiano mediante un’autostrada di comunicazione denominata BUS.
Un generico bus di un computer è diviso
in tre parti funzionali, Dati (data bus), Indirizzi
(address bus), Controlli (control bus).
Le diverse tipologie di bus sono: Bus processore-memoria (bus interno); Bus Backplane
(bus esterno – standard); Bus Input-Output (bus
esterno – standard industriale)
Il Bus di Backplane collega i dispositivi
PCI, PCI Express, SATA e SAS, il Bus di I/O quelli
USB, FireWire.
Tutte le informazioni che riguardano l’hardware nonché la diagnosi dello stato dell’hardware
stesso, sono effettuate da un programma di configurazione del PC: questo programma è il BIOS
(Basic Input/Output System).
Il BIOS è un firmware aggiornabile attraverso procedure software rilasciate dai costruttori.
Il BIOS è programmabile e tutti i parametri sono memorizzati in un chip di memoria presente sulla scheda madre.
Il programma di configurazione (BIOS) è
accessibile solo all’avvio del computer (boot) durante la fase di POST (Power On Self Test).
La configurazione del BIOS avviene mediante un programma (setup), con interfaccia
utente che permette di variare i diversi parametri
di configurazione delle periferiche e dei dispositivi
installati sulla scheda madre.
Sintesi
139
Quesiti
QUESITI
6
Un network pc è
CPU (3) 1.memoria
B RAM (1) 2.dispositivo per lo scambio dati
3.unità di elaborazione e controllo
C Bus (2) un semplice terminale destinato alla sola visualizzazione e immissione dei dati
B un computer desktop a basso costo, le cui funzionalità locali sono molto limitate X
C il più potenti tra i personal computer
D una computer di dimensioni ridotte che offre
una maggiore autonomia di funzionamento
2
7
A
1
Associare a ciascuna componente della macchina di Von Neumann il ruolo che essa svolge:
A
La CPU è divisa in:
registri
B unita aritmetica e unità logica
C unità di controllo e unità logico-aritmetica
X
D unità di controllo e registri
A
3
MIPS significa:
Multi Information Per Second
Million Instructions Per Second X
Million Information Per Second
Multi Instructions per Second
4
Associare a ciascun tipo di computer la caratteristica più appropriata.
a)
Supercomputer
Mainframe
Minicomputer
Microcomputer
Computer multiutente con velocità dell’ordine di centinaia MIPS (Minicomputer)
Computer monoutente con velocità dell’ordine di decine di MIPS (Microcomputer)
Computer multiutente con velocità dell’ordine di milioni di MIPS (Super)
Computer multiutente con velocità dell’ordine di migliaia di MIPS (mainframe)
b)
c)
d)
A
B
C
D
5
A
B
C
D
Il personal computer
nasce dopo la seconda guerra mondiale
nasce alla fine degli anni ’70 X
nasce negli anni ’60
nasce alla fine del XIX secolo
140
B
C
D
un circuito integrato
un complesso circuito stampato multistrato X
il chipset
l’insieme di CPU e RAM
8
Sulla scheda madre si trovano
A
B
C
D
i connettori e gli slot per le periferiche
i socket per il processore e le memorie
i chipset Southbrige e Northbrige
tutti questi componenti X
9
Il termine «tecnologia costruttiva» del processore indica
A
B
C
D
A
4 Computer
La scheda madre è
il materiale usato per fabbricare il processore
B la grandezza in micron dei transistor presenti
all’interno della CPU X
C la velocità della CPU
D la capacità della CPU
A
10Le caratteristiche principali di un processore sono
dimensioni del core, qualità del package, grandezza dei transistor
B frequenza di clock, ampiezza dei registri, set
d’istruzioni X
C capacità, tempo di accesso, tempo di ciclo, capacità di banda
D frequenza del clock, tempo di ciclo, dimensioni del core
A
11La memoria principale è
Elettronica X
B elettro-meccanica
A
C
elettro-magnetica
D magnetica
D
12Le caratteristiche principali di una memoria sono
17Il bus è
tempo di refresh, ampiezza dei registri, tempo
di ciclo
B capacità, tempo di accesso, tempo di ciclo, capacità di banda X
C frequenza di clock, ampiezza dei registri, set
d’istruzioni
D dimensioni dei condensatori, tempo di refresh, capacità di banda
un’architettura del computer
B un mezzo di trasporto che collega due o più
dispositivi
C un’ autostrada di comunicazione che collega
due o più dispositivi X
D un tipo di segnale elettrico
A
13Un HDD per memorizzare i dati utilizza una tecnologia
A
B
C
D
ottica
elettronica
magnetica X
meccanica
capacità, tempo di accesso, velocità di trasferimento X
B capacità, tempo di accesso, tempo di ciclo
C velocità di trasferimento, tempo di ciclo, capacità
D tempo di ciclo, tempo di accesso, velocità di
trasferimento
A
15Un SSD per memorizzare i dati utilizza una tecnologia
B
C
D
ottica
elettronica X
magnetica
meccanica
16Un SSD rispetto a un HDD presenta
minori costi, tempo di accesso ridotto, minore
produzione di calore
B maggiori consumi, tempo di accesso ridotto,
maggiore produzione di calore
C minori consumi, tempo di accesso ridotto, minore produzione di calore X
A
A
18Un generico bus di un computer è diviso in
A
B
C
D
data bus, address bus, I/O bus
address bus, I/O bus, control bus
data bus, I/O bus, control bus
data bus, address bus, control bus X
19Il NorthBridge è
il bus processore memoria X
B il bus I/O
C il bus di sistema
A
14Le caratteristiche principali di un disco rigido sono
A
maggiori costi, minori consumi, maggiore
produzione di calore
20Il SouthhBridge è
il bus processore memoria
B il bus I/O X
C il bus di sistema
A
21Le interfacce SATA sono
parallele
B seriali
C seriali ad alta frequenza X
A
22Le interfacce SAS sono pensate per
A
B
C
D
carichi di lavoro leggeri
applicazioni «critical server» X
budget limitati
mercato «consumer»
23Gli slot di espansione di tipo PCI Express possono essere
A
x1
Esercizi
141
le sue interfacce con le altre unità di un sistema
di elaborazione
x4
C x16
D di tutti e tre i tipi
B
5
Spiegare brevemente qual è la gerarchia della memoria presente in un sistema di elaborazione, commentando capacità e velocità dei singoli livelli.
6
Se si vuole dotare di 16GB di memoria centrale un elaboratore avente un data bus da 32bit,
quale deve essere la dimensione minima dell’address bus?
7
Dovendo scegliere un disco esterno da aggiungere al proprio PC, quali fattori influenzano la scelta
a parità di prezzo e quantità a dati memorizzabile?
8
Un personal computer è descritto sinteticamente
nei seguenti termini:
... Intel Pentium Dual-Core E5700 3.0GHz, 4 Gb
DDR3 800 MHz, HD 500Gb 7200 RPM SATA-II 16
Mb buffer, Nvidia 256MB, 3x porte USB 2.0, DVD, .....
Si illustri il significato di tutte le cifre e sigle riportate.
9
Un personal computer è descritto sinteticamente
nei seguenti termini:
Un utente acquista un nuovo hard disk con capacità di 250GB. Dopo averlo installato sul proprio
Personal Computer, rileva che lo spazio libero a
disposizione ammonta a solamente 240GB. Si
discutano le possibili cause di tale discrepanza.
[...] Intel QC i7-2600 3.4GHz, 8GB (2x4GB) DDR3
1333 Mhz, 2 x 500, GB Serial ATA on board con
RAID 0/1, Intel Graphics Media Accelerator
X4500 integrata [...]
Si illustri il significato delle varie cifre e sigle riportate, e si caratterizzi la tipologia di computer
descritto (desktop, worksation, server, di fascia
alta o bassa, ...).
Spiegare che cosa è la memoria cache e perché
ne esistono diverse (I livello, II livello,...) nei sistemi di elaborazione.
10Si spieghi brevemente che cos’è la tecnica RAID
24Il bus USB è caratterizzato da
facilità d’uso, connessione «a caldo», rilevazione automatica delle periferiche X
B facilità d’uso, connessione «a freddo», rilevazione automatica delle periferiche
C facilità d’uso, connessione «a caldo», rilevazione manuale delle periferiche
D connessione «a caldo», rilevazione automatica
delle periferiche, alto costo
A
25Il BIOS
è un programma residente nella RAM
B è un circuito integrato presente sulla scheda
madre
C è il programma di configurazione del PC X
D è un programma scritto dall’utente della macchina per inizializzare il sistema
A
Quesiti
ESERCIZI
1
2
3
Commentare la seguente affermazione, dicendo
se può essere corretta, e in quali casi:
...l’utente, per aumentare la velocità di elaborazione del suo computer, decide di installare una
quantità doppia di memoria RAM...
4
Disegnare lo schema di una generica CPU e illustrare brevemente il ruolo dei suoi elementi e del-
142
4 Computer
e si indichi per quale categoria di computer è
particolarmente importante.
11Spiegare
brevemente che cos’è interfaccia SAS,
indicando qual è l’ordine di grandezza della sua
velocità di funzionamento e su quali elementi di un
sistema di elaborazione è tipicamente presente.
12Due
sistemi di elaborazione sono costruiti in
modo identico, fatta eccezione per il micro-
processore. Si indichino quali sono i parametri
quantitativi associati al microprocessore che
possono determinare quale dei due sistemi di
elaborazione è più veloce.
13Un
personal computer configurato, secondo la
scheda di seguito riportata, si vuole trasformarlo
in una workstation cosa devo sostituire?
14Un
viare posta elettronica quando è fuori dall’ufficio
dove utilizza un personal computer Desktop,
cosa potrebbe acquistare per soddisfare le sue
esigenze con una spesa contenuta.
15Volendo assemblare una Workstation quali sono
le componenti sono fondamentali per avere buone prestazioni?
libero professionista desidera ricevere e in-
Esercizi
143