Relè elettronici e sensori - 1
Relè elettronici e sensori
1 - Relè elettronici
Protezione degli impianti
I sistemi di protezione degli impianti elettrici hanno lo scopo di rilevare tempestivamente le
condizioni di guasto. Inoltre devono intervenire in modo appropriato per ridurre al minimo le
conseguenze del guasto e il disservizio sulla rete.
Dunque, in caso di anomalie, la prima azione sarà la disconnessione della parte guasta e poi il
ripristino della parte sana della rete.
I guasti nei sistemi elettrici sono di diverso tipo e anche il comportamento delle linee e degli
apparati è diverso a seconda del tipo guasto. Pertanto le funzioni svolte dai relè devono essere
specializzate. In alcuni casi coesistono nello stesso dispositivo più funzioni di protezione.
Evoluzione dei relè
I relè elettromeccanici sono stati i primi ad essere impiegati nella tecnologia delle protezioni
su gli impianti elettrici. Il loro principio di funzionamento era basato sull’interazione fra correnti e campi magnetici al fine di produrre delle forze in grado di agire sul sistema di apertura
degli interruttori (il principio di funzionamento era lo stesso di quello dei contatori di energia
a induzione). I relè elettromeccanici potevano richiedere al trasformatore di protezione che li
alimentava una “burden” (cioè una potenza) abbastanza elevata, infatti tutta l’energia necessaria veniva prelevata dal trasformatore i protezione.
Inoltre, normalmente, potevano svolgere solo una funzione protettiva ed erano pesanti e ingombranti. Le impostazioni di regolazione dello scatto erano solo manuali.
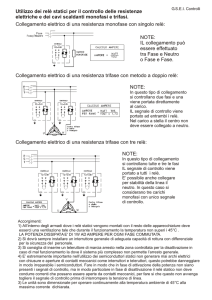
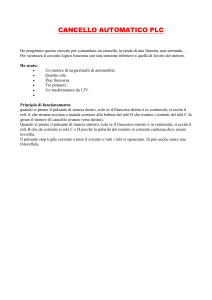
La Fig.1.1 mostra l’evoluzione dei relè di protezione.
Fig.1.1 - Relè elettromeccanico (a sinistra) e
relè elettronici di tipo analogico (al centro) e numerico (a destra) .
I relè elettronici a stato solido (solid-state) si sono diffusi a partire dagli anni “60” e le loro
funzioni sono svolte da circuiti elettronici di tipo analogico.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
2 - Relè elettronici e sensori
I relè elettronici sono più piccoli e leggeri di quelli elettromeccanici, tuttavia sono più sensibili alle interferenze dei campi elettromagnetici vicini.
Le impostazioni delle varie funzioni e delle soglie si ottengono normalmente mediante microinterruttori (DIP switch) posti sul frontale le relè.
I relè digitali o numerici sono la tecnologia adottata per i nuovi impianti e sono basati su sistemi di acquisizione dati, che rilevano i segnali di tensione e corrente sulle sbarre del sistema
trifase. Lo svolgimento delle funzioni di protezione è ottenuto tramite algoritmi che girano su
microprocessori di tipo generale o, più spesso, su microprocessori dedicati (DSP) con modalità di elaborazione particolarmente veloci ed efficienti. La predisposizione iniziale dei relè
numerici è fatta tramite PC.
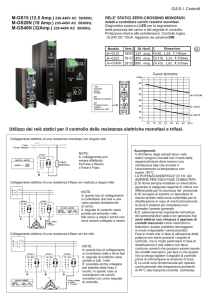
Circuiti di ingresso
Per trasdurre le grandezze elettriche sulle sbarre di un sistema trifase si possono impiegare i
classici trasformatori magnetici (TA e TV). Normalmente i TA hanno le uscite a 5 A mentre i
TV hanno le uscite a 100 V. Pertanto, in questi casi, i circuiti d’ingresso dei relè elettronici
hanno bisogno di ulteriori sistemi di condizionamento del segnale, in modo da trasformare
queste grandezze elettriche in segnali di tensione che variano entro un range limitato, per esempio ± 10 V. In alternativa ai TA e TV si possono impiegare i più moderni sensori con uscita direttamente in tensione.
Fig.1.2 - Circuiti di ingresso del relè.
In generale, indicheremo con kTA e kTV i rapporti di riduzione nominale dei trasformatori di
misura (oppure dei trasduttori non convenzionali) conglobando in essi, per semplicità, anche i
valori delle ulteriori riduzioni necessarie.
Allora i segnali s(t) consegnati ai circuiti di ingresso del sistema di acquisizione dati risultano
solo segnali di tensione, legati alle grandezze del sistema elettrico, le tensioni e le correnti.
Ad esempio, i segnali per la fase L1 sono:
si1 (t ) =
i1 (t )
kTA
e
se1 (t ) =
e1(t )
kTV
(1.1)
La configurazione degli ingressi del relè, con le tre correnti di linea (I1 I2 I3) e le tre tensioni di
fase (E1 E2 E3), è la più tipica.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 3
In molti casi è possibile avere in ingresso anche altri segnali, per esempio la corrente sul neutro (In) e le componenti omopolari della tensione (V0) e della corrente (I0), per la protezione
dai guasti a terra. Inoltre sono normalmente presenti anche ingressi e uscite di tipo logico.
Infatti i moderni relè elettronici consentono di comunicare, sia localmente con le altre apparecchiature dell’impianto o della sottostazione, sia a distanza con i nodi di controllo e “dispacciamento” della rete.
In tal modo informano il sistema del loro stato e dal sistema ricevono comandi operativi.
L’uscita più importante di un relè di protezione è senz’altro il segnale di apertura
dell’interruttore.
Il sistema di acquisizione dati
Nei relè numerici, il sistema di acquisizione dati effettua il campionamento sui canali
d’ingresso, in modo simultaneo oppure sequenziale impiegando il multiplexer.
La frequenza di campionamento effettiva su ciascun canale può variare da qualche centinaio
hertz a diverse migliaia di hertz.
Per esempio, se vogliamo rilevare fino alla 40-esima armonica, con una fondamentale a 50
Hz, la frequenza di campionamento di ogni canale dovrebbe essere almeno pari a fc:
f c > 2 ⋅ 50 ⋅ 40 = 4 kHz
(1.2)
Inoltre, se volessimo interrogare fino a 10 canali in ingresso, usando il multiplexer, la frequenza massima del campionatore (S&H) dovrebbe essere almeno fc,max = 10⋅4 kHz = 40 kHz.
Normalmente i convertitori commerciali hanno frequenze di campionamento massime che sono molto superiori a questo valore, pertanto il convertitore con multiplexer è più che adatto
per le analisi a regime.
Fig.1.3 - Il sistema di acquisizione dati.
Talvolta la simultaneità del campionamento può essere richiesta per elaborazioni particolarmente accurate fra campioni di più canali (per esempio nel caso delle misure di potenza ed
energia). I convertitori analogico-digitali (ADC) possono essere del tipo ad approssimazioni
successive a 16 o 20 bit.
Il filtro antialiasing
Sui canali di ingresso del sistema di acquisizione dati è presente normalmente un filtro antialiasing analogico, il cui scopo è quello di ridurre il contenuto massimo in frequenza fM del segnale in ingresso s(t), vedi Fig.1.4 dove H(f) è la funzione di trasferimento del filtro.
In particolare sono filtrate le componenti armoniche in alta frequenza e il rumore (noise).
In tal modo si evita che il contenuto armonico indesiderato venga spostato in banda base, in
seguito al campionamento, distorcendo lo spettro del segnale di interesse S(f).
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
4 - Relè elettronici e sensori
Il taglio della banda in ingresso deve essere limitato alle armoniche che si vogliono rivelare.
Per esempio, se vogliamo mantenere le prime 40 armoniche dovremmo avere un filtro antialiasing in ingresso con banda passante di 40⋅50 Hz = 2 kHz.
Fig.1.4 - Filtro antialiasing.
In molti tipi di relè numerici è possibile ottenere anche la registrazione dei transitori di rete.
In tal caso il sistema di acquisizione dati deve avere le prestazioni tipiche di un oscilloscopio
digitale a memoria (DSO, Digital Storage Oscilloscope).
In questi casi il campionamento è simultaneo su tutti i canali d’ingresso e la velocità di campionamento è dell’ordine delle centinaia di kilohertz o megahertz, a seconda della velocità dei
transitori che si vogliono registrare.
Le registrazioni interessano contemporaneamente sia le tensioni che le correnti di tutte le fasi, in modo da avere una correlazione degli eventi e una visione completa del transitorio.
Le funzioni di protezione del relè numerici sono svolte mediante algoritmi che girano, normalmente, su microprocessori dedicati (DSP). Questo tipo di processori è progettato e ottimizzato per svolgere in modo molto efficiente alcune semplici operazioni matematiche (per
esempio la convoluzione), alle quali si possono quasi sempre ricondurre gli algoritmi.
In tal modo lo stesso hardware ha un’architettura generale che può essere utilizzata per gran
parte delle protezioni, modificando solo l’algoritmo specifico per l’applicazione di interesse.
Questa fatto consente di razionalizzare l’investimento di sviluppo dell’hardware e i costi di
manutenzione.
Le funzioni di protezione
Le principali applicazioni dei relè numerici riguardano i relè di sovracorrente, i relè distanziometrici, i relè direzionali e i relè differenziali.
La protezione di sovracorrente ha lo scopo di rilevare le correnti anomale nei circuiti, nelle
apparecchiature e nelle linee.
La protezione distanziometrica ha lo scopo di stimare la distanza, lungo una linea di distribuzione o di trasmissione, alla quale si è verificato un guasto, rispetto al punto di misura posto
normalmente sulle sbarre della stazione.
La protezione direzionale ha lo scopo di distinguere fra più linee in partenza da un sistema di
sbarre (tipico il caso in cabina primaria) la linea in cui si è verificato un guasto a terra, controllando la corrente e la tensione omopolare.
La protezione differenziale ha lo scopo di individuare la circostanza in cui la corrente che entra in una linea non rientra tutta attraverso la stessa linea, ma segue altri percorsi.
I relè numerici acquisiscono con accuratezza i segnali in ingresso e svolgono con precisione
l’algoritmo implementato. In tal modo si riducono le probabilità di falsi interventi e i conseguenti fuori servizio della linea o delle apparecchiature.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 5
Per la maggior parte delle protezioni si impiegano algoritmi che fanno riferimento al valore
efficace (RMS) oppure alla componente fondamentale del segnale in ingresso (DFT).
Il valore calcolato viene analizzato sulle curve di intervento, in relazione al tipo di protezione.
Per esempio, se consideriamo le protezioni di massima corrente le curve di intervento sono
definite dalle Norme IEC. Fra queste curve, al momento della predisposizione del relè, si imposta quella più adatta alla realtà dell’impianto e da questa curva il relè estrae il valore del
tempo di ritardo di apertura dell’interruttore.
Stima del valore RMS
La stima del valore efficace di un segnale s(t) di tensione o di corrente può essere fatta applicando al segnale s(t) la definizione RMS nel dominio del tempo e la sua approssimazione numerica:
Seff =
1
T
∫T
Seff =
s 2 (t ) dt
1
Np
Np
∑ sh2
(1.3)
h =1
Il numero di campioni Np nel periodo può essere assunto a priori, se è stata stabilita la frequenza di campionamento del segnale fc = 1/Tc e si assume che la frequenza di riferimento del
sistema sia pari a f0 = 1/T0 = 50 Hz.
Per esempio, se si vuole campionare il segnale prendendo 80 campioni per periodo, sarà
Np =
T0 f c
=
Tc f 0
⇒
f c = N p ⋅ f 0 = 80 ⋅ 50 = 4 kHz
(1.4)
Per i relè standard, a seconda del modello e delle prestazioni, il numero di campioni in un periodo Np varia a fra 8 e 128. Pertanto, nei sistemi di potenza a 50 Hz, la frequenza di campionamento fc su ciascun canale è compresa nel range:
f c = (8 ÷ 128) ⋅ 50 = 400 ÷ 6400 Hz
(1.5)
Nei relè con funzioni oscillografiche, la frequenza di campionamento può essere maggiore,
per una più accurata ricostruzione.
2 - Analisi in frequenza
Trasformata di Fourier
Gli algoritmi usati nei relè numerici impiegano molto spesso la trasformata discreta di Fourier
(DFT) oppure (FFT) per ottenere l’ampiezza della componente fondamentale del segnale di
interesse s(t), tensione o corrente.
Esiste una differenza concettuale tra il valore efficace (RMS) di un segnale e la sua componente di prima armonica o fondamentale (ottenuta tramite la trasformata di Fourier).
Infatti il valore efficace (RMS), valutato con la sua definizione generale, mette in conto tutte
le armoniche presenti in un segnale, mentre la componente fondamentale di un segnale periodico generico, per esempio a 50 Hz, rappresenta solo la sua componente sinusoidale, appunto
a 50 Hz.
L’analisi in frequenza è trattata nel corso base di Misure Elettriche ed Elettroniche e nel seguito si riporta solo un breve richiamo.
Il segnale da campionare s(t) deve essere a banda limitata e dunque avere un contenuto armo© 2014, Nicola Locci
Misure sui Sistemi di Potenza
6 - Relè elettronici e sensori
nico, cioè lo spettro S(f), che si estende fino a una certa frequenza massima fM (vedi Fig.).
Fig.2.1 - Segnale a banda limitata.
Nel seguito faremo riferimento allo spettro S(f) del segnale in forma bilatera, cioè considerando le frequenze positive e negative ( ± f).
Il legame fra il segnale nel tempo s(t) e lo spettro in frequenza S(f) è dato dalla trasformata di
Fourier (diretta e inversa):
+∞
S ( f ) = ∫ s(t ) e− j 2 πft dt = ℑ[ s(t )]
−∞
s(t ) ⇔ S ( f )
+∞
s (t ) = ∫ S ( f ) e
j 2 πft
−∞
(2.1)
df = ℑ−1[ S ( f )]
Il campionamento nel tempo si può considerare come il prodotto algebrico del segnale s(t) per
un treno di impulsi ideali spaziati di un tempo Tc (vedi Fig.2.2).
La frequenza di campionamento è fc = 1/Tc.
Fig.2.2 - Segnale campionato.
In corrispondenza al prodotto algebrico nel dominio del tempo si ha il prodotto di convoluzione degli spettri nel dominio della frequenza:
sc (t ) = s(t ) ⋅
+∞
∑ δ(t − iTc ) =
i = −∞
Sc ( f ) = S ( f ) ∗ f c
+∞
+∞
∑ s(iTc ) ⋅ δ(t − iTc )
∑ δ( f − kfc ) = fc
k =−∞
(2.2)
i = −∞
+∞
∑ S ( f − kfc )
(2.3)
k =−∞
Dunque lo spettro Sc(f) di un segnale campionato sc(t) è formato da una successione di repliche nel dominio della frequenza dello spettro in banda base S(f), centrate su frequenze multiple della frequenza di campionamento fc (a parte un fattore moltiplicativo pari a fc).
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 7
Sequenze finite
In pratica, l’analisi numerica del segnale (Digital Signal Processing, DSP) richiede di operare
su una sequenza di campioni in numero finito. Pertanto si deve utilizzare una finestra temporale di durata finita Tw contenente i campioni da elaborare. La finestra di osservazione potrà
essere continuamente aggiornata, al trascorrere del tempo.
Quando si utilizza una porzione del segnale sw(t) di durata limitata talvolta si dice “finestrare”
un segnale. Questa porzione del segnale dovrebbe essere sufficiente a rappresentare efficacemente tutto il segnale dal quale viene estratta.
In generale questa operazione può introdurre la distorsione di leakage nello spettro, cioè una
dispersione delle spettro, più o meno sensibile, nel dominio della frequenza.
Fig.2.3 - Durata finita del segnale e distorsione di leakage.
Dunque, quando si campiona un segnale nel tempo, si hanno le repliche dello spettro in frequenza. Ma se il campionamento dura per un tempo finito Tw, avremo le repliche di uno spettro con la dispersione spettrale di leakage e questo comporta inevitabilmente l’aliasing (cioè
l’interferenza da spettro adiacente.
Fig.2.4 - Campionamento con distorsione di leakage e aliasing.
Stima dello spettro
La stima della armoniche di un segnale può essere fatta con l’analisi nel dominio della frequenza mediante la trasformata discreta di Fourier (DFT).
In generale, la DFT equivale a considerare un segnale nel tempo, ottenuto replicando la successione di campioni osservati nell’intervallo Tw (vedi la Fig.2.5), dunque reso periodico.
Nella stessa Fig2.5 è riportato lo spettro (per semplicità solo lo spettro di ampiezza) del segnale campionato e replicato.
La trasformata discreta di Fourier (DFT) fa corrispondere N numeri reali nel tempo con N/2
numeri complessi in frequenza.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
8 - Relè elettronici e sensori
Fig.2.5 - Sequenze finite di campioni, nel tempo e nella frequenza.
Le armoniche di ordine k dello spettro bilatero si valutano con la seguente relazione:
1
Sk =
N
1
=
N
N −1
∑ si e
−j
2π
ki
N
=
i =0
N −1
2π
1
∑ si cos( N ki) − j N
i =0
N −1
2π
∑ si sin( N ki) =
(2.4)
i =0
= Re[Sk ] + j Im[Sk ] = Sk e jϕ k
In tal modo si ottiene il modulo e la fase delle diverse righe spettrali:
Sk = Re 2 [ Sk ] + Im2 [ Sk ]
e
ϕk = arctan
Im[Sk ]
Re[Sk ]
(2.5)
Delle componenti armoniche Sk, solo le prime N/2 portano informazione, mentre le successive
N/2 sono complesse e coniugate delle prime, come si può osservare dalla Fig.2.6.
Fig.2.6 - Armoniche di interesse in modulo e fase da (0 ÷ fc).
I campioni si del segnale nel tempo s(t) si possono ricostruire dalle armoniche Sk nella forma
seguente (anti trasformata discreta di Fourier):
si =
N −1
∑ Sk e
j
2π
ki
N
=
k =0
Misure sui Sistemi di Potenza
N /2
2π
∑ 2 Sk cos( N ki + ϕk )
(2.6)
k =0
© 2014, Nicola Locci
Relè elettronici e sensori - 9
Osserviamo che lo spettro bilatero Sk rappresenta le componenti armoniche a frequenze positive (+k) e negative (-k), vedi la Fig.2.7 A. Le frequenze negative non hanno significato fisico,
ma consentono di avere una rappresentazione analitica comoda e compatta.
Fig.2.7 - Spettro bilatero (A) e unilatero (B).
Lo spettro unilatero (Fig.2.7 B) si riferisce solo a frequenze positive (+k) e si ottiene moltiplicando per due il modulo di Sk.
Ampiezza delle armoniche
Nelle applicazioni che stiamo considerando, siamo interessati alla stima della componente
fondamentale del segnale.
Se il segnale nel tempo è già di per se periodico (per esempio con periodo T di 20 ms a 50
Hz), conviene utilizzare una finestra di osservazione uguale al periodo Tw = T.
Questo è il caso ideale (così come nel calcolo RMS, abbiamo impiegato i punti esattamente
contenuti in un periodo T dell’onda).
In generale, con riferimento allo spettro unilatero che rappresenta le ampiezze di picco Ap,k
delle diverse oscillazioni sinusoidali di ordine k, avremo:
2
2Sk =
N
2
=
N
N −1
−j
2π
ki
N
i =0
2
=
N
N −1
N −1
∑ si e
2
∑ siai − j N
i =0
N −1
2π
2
∑ si cos( N ki) − j N
i =0
N −1
2π
∑ si sin( N ki) =
i =0
(2.7)
∑ sibi = Re[2Sk ] + j Im[2Sk ]
i =0
Dove l’ampiezza di picco dell’oscillazione armonica è:
Ap,k = 2 Sk
(2.8)
Architettura DSP
Una possibile architettura DSP per calcolare la DFT con N campioni è mostrata in Fig.2.8.
I campioni temporali del segnale in ingresso si vengono caricati in un registro con N posizioni.
All’arrivo di un nuovo campione si tutto il contenuto del registro si sposta in avanti di una posizione verso destra (registro FIFO, First In First Out).
Il primo dato arrivato è s0 mentre l’ultimo dato arrivato è sN-1.
Ciascun campione si viene moltiplicato per i coefficienti ai e bi e il risultato del prodotto attuale viene sommato con il risultato del prodotto precedente.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
10 - Relè elettronici e sensori
Fig.2.8 - Architettura per la DFT.
I coefficienti ai e bi sono definiti per ogni k:
ai = cos(
2π
ki )
N
bi = sin(
2π
ki )
N
(2.9)
Alla fine del processo di moltiplicazione e di accumulo, le uscite dell’algoritmo sono la parte
reale Re[Sk] ed immaginaria Im[Sk] della generica componente spettrale Sk di ordine k.
La convergenza verso il valore finale della componente Sk si ottiene considerando tutti i campioni in un periodo (dunque 20 ms a 50 Hz).
Una volta che il registro con N posizioni è stato riempito, si ottiene il valore della armonica Sk
(parte reale ed immaginaria).
Quando, dopo N campioni, arriva un altro campione si, il contenuto del registro si sposta tutto
di una posizione verso destra e viene ricalcolata l’armonica Sk.
Se il segnale non è variato, il risultato del calcolo non cambia e dunque l’uscita della DFT rimane costante.
Stima della fondamentale
Se siamo interessati solo alla componente fondamentale di prima armonica (k = 1), lo schema
che abbiamo mostrato è sufficiente. Se invece vogliamo conoscere tutte le N armoniche, il
calcolo deve essere implementato N volte. Per il calcolo della trasformata discreta di Fourier
si possono impiegare algoritmi veloci come la FFT (Fast Fourier Transform).
Se in ingresso al blocco DSP abbiamo una sinusoide a 50 Hz e la sua ampiezza varia bruscamente (come nel caso di un guasto) la DFT aggiorna l’uscita dopo 20 ms.
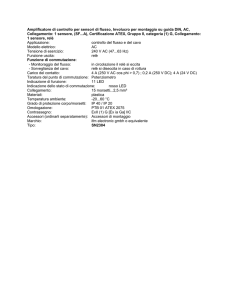
3 - Esempi dell’algoritmo DFT
Esempi DFT
In Fig.3.1 si mostra una sinusoide a 50 Hz con valore di picco di 10 V, campionata con 80
campioni per periodo, per 20 ms (la frequenza di campionamento è 80⋅50 Hz = 4 kHz).
A destra si riporta l’andamento della stima della prima armonica S1 al procedere del calcolo
della DFT sui campioni che man mano arrivano all’unità DSP, fino a completare il periodo
con 80 campioni. Questo valore S1 deve essere moltiplicato per 2 per ottenere il valore di picco Ap,1 della sinusoide fondamentale.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 11
Fig.3.1 - Aggiornamento della DFT;
80 campioni per periodo.
Nell’esempio in Fig.3.2 la sinusoide a 50 Hz ha valore di picco di 10 V ma è campionata con
8 campioni per periodo, per 20 ms (la frequenza di campionamento è 8⋅50 Hz = 400 Hz).
L’andamento della DFT mostra che la convergenza nel calcolo dell’ampiezza della fondamentale (2x) non dipende dal numero di campioni. Infatti, per il teorema del campionamento, il
numero minimo è di due campioni per periodo.
Fig.3.2 - Aggiornamento della DFT;
8 campioni per periodo.
Supponiamo infine che il segnale vari leggermente la sua frequenza, per esempio da 50 Hz a
52 Hz, mentre la frequenza di campionamento rimane quella corrispondente a 50 Hz (80 campioni in 20 millisecondi a 4 kHz), vedi la Fig.3.3.
Fig.3.3 - Aggiornamento della DFT;
80 campioni per 20 millisecondi; variazione di frequenza da 50 a 52 Hz.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
12 - Relè elettronici e sensori
Osservando la progressione del calcolo della DFT di prima armonica, si vede che la variazione di frequenza non è particolarmente critica per la convergenza dell’algoritmo. Ricordiamo a
tal proposito che nei sistemi di potenza normalmente la frequenza varia molto poco.
Infine, nelle Fig.3.4 mostriamo , per i due segnali sinusoidali a 50 Hz e 52 Hz, anche lo spettro delle prime 40 armoniche, calcolato con la DFT fino a 40⋅50 Hz = 2 kHz.
Notare nei diagrammi di ampiezza e fase una leggera distorsione spettrale (leakage + aliasing) nel caso a 52 Hz, per cui l’analisi di Fourier rivela piccole righe non presenti nello spettro del segnale in ingresso.
Fig.3.4 - Analisi DFT di un segnale sinusoidale a 50 Hz e
a 52 Hz, nel caso di imperfetta sincronizzazione.
Spesso i relè numerici hanno anche la funzione di misura della frequenza attuale e la possibilità di controllare con questa informazione la frequenza effettiva di campionamento fc impiegata e ottenere la perfetta sincronizzazione.
Il filtro DFT
Se il sistema elettrico è in condizione di regime, la generica componente armonica Sk rimane
costante al trascorrere del tempo.
Poiché stiamo lavorando con segnali campionati, possiamo considerare l’uscita del blocco di
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 13
calcolo DSP come l’uscita di un sistema dinamico che, nel tempo, produce una successione di
campioni che sono le ampiezze delle armoniche Sk,h avendo indicato con h l’indice temporale
corrente della generica armonica Sk.
In pratica il blocco di calcolo DSP opera come la convoluzione nei sistemi dinamici fra la sequenza temporale di campioni in ingresso si e i coefficienti del filtro DFT.
Pertanto i campioni attuali della generica componente armonica Sk,h si possono scrivere nel
seguente modo, rispetto all’istante corrente h:
2Sk ,h
2
=
N
2
=
N
N −1
∑ s( h − i ) e
−j
2π
k ( h −i )
N
=
i =0
N −1
2π
2
∑ s(h − i) cos[ N k (h − i)] − j N
i =0
N −1
2π
∑ s(h − i) sin[ N k (h − i)]
i =0
(3.1)
Si è detto che la durata di osservazione limitata a Tw contiene N campioni, spaziati di un tempo Tc e dunque che si ripetono con la frequenza di campionamento fc:
Tc =
Tw
N
⇒
fc =
1
= Nf w
Tc
(3.2)
La trasformata di Fourier della successione di campioni è formata da repliche in frequenza
dello spettro, di cui solo la prima replica compresa fra (0 ÷ fc) porta informazione.
Come è noto dal Corso di base di Misure Elettriche ed Elettroniche, una finestra di osservazione di durata limitata Tw ha una trasformata di Fourier che risulta una funzione continua della frequenza di tipo “sinc”.
Inoltre l’operazione DFT può essere considerata, da un punto di vista formale, come un filtro
numerico che moltiplica i campioni del segnale si per la funzione esponenziale complessa, o
per le funzioni “seno” e “coseno”.
Nella Fig.3.5 si mostra un filtro DFT corrispondente a una finestra di osservazione di 20 ms,
contenente 8 campioni unitari con fc =400 Hz. Nella Fig.3.5 si riporta anche la trasformata di
Fourier della finestra di osservazione in termini di ampiezza e fase e in termini di parte reale e
immaginaria. La trasformata di Fourier della sequenza è formata da repliche, di cui basta conoscere solo la prima replica, compresa fra 0 e fc = 400 Hz.
Fig.3.5 - Trasformata di Fourier della finestra di campionamento:
ampiezza e fase (a sinistra), parte reale e immaginaria (a destra).
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
14 - Relè elettronici e sensori
DFT su un periodo
Consideriamo ora un segnale sinusoidale con ampiezza di 10 V e frequenza 50 Hz e la successione di campioni per un intero periodo, dunque 8 campioni alla frequenza di campionamento di 400 Hz. In Fig.3.6 si mostra la trasformata di Fourier dell’uscita del filtro DFT e gli
8 campioni (in modulo e fase) ottenuti con il calcolo DFT.
Fig.3.6 - Trasformata di Fourier e DFT su un periodo.
Osservando lo spettro continuo della trasformata di Fourier, si vede che l’ampiezza della
componente fondamentale (2x) viene calcolata correttamente (2x5 V), in corrispondenza alla
frequenza di 50 Hz, mentre tutte le armoniche ai suoi multipli (100, 150, 200, 250, 300, 350,
400 Hz) sono nulle. Questi sono i punti che verrebbero calcolati anche dalla DFT (vedi
Fig.3.6 a destra).
DFT su mezzo periodo
Consideriamo ora una finestra DFT che opera solo su mezzo periodo (4 campioni a 400 Hz).
La componente fondamentale (2x) non viene calcolata direttamente dalla DFT, che restituisce
solo delle armoniche pari (100, 200 e 300 Hz) e anche una componente continua, di fatto non
presenti nel segnale (vedi la Fig.3.7).
Fig.3.7 - Trasformata di Fourier e DFT su mezzo periodo.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 15
Ciò è dovuto al fatto che i campioni utilizzati coprono solo mezzo periodo (10 ms) e la ripetizione della successione dei campioni avrebbe dunque 100 Hz come frequenza fondamentale.
Tuttavia, lo spettro continuo della trasformata di Fourier mostra che si potrebbe ancora valutare correttamente la componente a 50 Hz, che infatti è pari a 5 (2x).
Pertanto, se indichiamo ancora con N il numero di campioni che si avrebbero su tutto il periodo T, l’espressione da utilizzare per calcolare la prima armonica S1 a 50 Hz è la seguente:
2π
2 N / 2−1 − j N / 2 (1/ 2)i
2S1 =
∑ si e
N / 2 i =0
(3.3)
Dunque l’algoritmo su mezzo periodo può consentire, con queste limitazioni e con qualche
attenzione, la stima dell’ampiezza fondamentale in un tempo ridotto (in soli 10 ms).
Altre finestre di osservazione
Notiamo infine che una finestra di osservazione lunga (per esempio100 ms, come in Fig.3.8),
con la stessa frequenza di campionamento, consente una migliore risoluzione in frequenza.
Infatti si utilizzano più punti, ma cresce il tempo di acquisizione e di calcolo e si rallenta la
prontezza del relè. Bisogna dire che tempi di osservazione più lunghi rendono meno rilevanti i
problemi di sincronizzazione.
Fig.3.8 - Finestra di osservazione di 100 millisecondi.
Se si impiegano molti campioni per periodo (in Fig.3.9 sono 80 campioni a 4 kHz) si può analizzare uno spettro più esteso e quindi di individuare più armoniche, se presenti.
Fig.3.9 - Finestra di osservazione con molti campioni nel periodo.
Gli algoritmi che abbiamo presentato (il calcolo RMS e la stima dello spettro e della prima
armonica tramite DFT) fanno riferimento normalmente a un periodo e sono certamente molto
diffusi.
In pratica la scelta degli algoritmi dipende dagli obiettivi che si vogliono ottenere e dalle potenzialità che deve avere il relè.
In casi particolari, per fare la stima dell’ampiezza, si potrebbero impiegare due soli campioni.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
16 - Relè elettronici e sensori
Stima del fasore
Supponiamo che il segnale sia sicuramente sinusoidale e dunque il suo comportamento si possa rappresentare tramite i fasori (vedi Fig.3.10).
Il fasore di una grandezza elettrica (tensione o corrente) è determinato dal modulo e dalla posizione angolare. Per esempio, con riferimento a un segnale s(t) avremo:
s ( t ) ⇒ S = S p e jωt = Re( S ) + j Im(S )
(3.4)
Dove Sp è il valore di picco e ω la pulsazione.
Per due campioni successivi (s1 e s2) sulla sinusoide risulta:
s2 = S p sin ωt2 = Im[S(t2 )]
(3.5)
s1 = S p sin ω(t2 − tc )
Fig.3.10 - Stima del fasore.
Dunque il valore del secondo campione s2 fornisce la componente immaginaria del fasore
Im[S(t2)] nel punto t2. Per determinare la parte reale Re[S(t2)], sviluppiamo il primo campione
s1 con le formule trigonometriche di somma e sottrazione:
s1 = S p sin ω(t2 − tc ) = S p [sin ωt2 ⋅ cos ωtc − cos ωt2 ⋅ sin ωtc ]
(3.6)
Sostituendo il valore del campione s2 si ha:
s1 = s2 cos ωtc − S p cos ωt2 ⋅ sin ωtc
(3.7)
Da cui si ottiene la parte reale del fasore S(t2) in t2:
Re[S(t2 )] = S p cos ωt2 =
s2 cos ωtc − s1
sin ωtc
(3.8)
In definitiva, misurando solo due punti sulla sinusoide (s1 e s2) e conoscendo il tempo tc che li
separa, si può ottenere l’ampiezza del fasore Sp:
Sp =
s2 cos ωtc − s1
cos ωt2 ⋅ sin ωtc
(3.9)
Questo metodo può essere impiegato solo se il segnale è perfettamente sinusoidale.
Inoltre è sensibile ai disturbi sovrapposti ai campioni e all’incertezza nel tempo di campionamento tc. Risultati più accurati si ottengono considerando più punti e impiegando, come già
visto, algoritmi efficienti e robusti, come il calcolo RMS e la trasformata discreta di Fourier
DFT che sono effettivamente i più usati.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 17
4 - La protezione di massima corrente
Il valore di riferimento
Normalmente, ai fini della protezione di massima corrente, la DFT restituisce il valore di picco della componente fondamentale (k = 1) del segnale in ingresso s(t):
Ap ,k =1 = 2 Sk =1
(4.1)
Le soglie dei relè sono impostate sul valore efficace (RMS) della fondamentale:
ARMS ,1 =
Ap,k =1
2
= 2 Sk =1
(4.2)
Se applichiamo l’algoritmo RMS, il risultato è equivalente a quello della DFT solo se il segnale è sinusoidale. Infatti, se il segnale ha delle armoniche, l’algoritmo RMS le mette in conto:
ARMS
1
=
N
N
∑
h =1
sh2
=
∞
∑
k =0
2
ARMS
,k
=
∞
Ap2,k
k =0
2
∑
(4.3)
La protezione di massima corrente
Le protezioni di massima corrente sono classificate con delle sigle (simboli o numeri) a seconda del tipo di intervento.
Le sigle più usate sono quelle IEC (International Electrotechnical Commission) e ANSI (American National Standards Institute):
Protezione trifase di sovracorrente:
Soglia bassa
Soglia alta
Soglia di intervento istantaneo
IEC
I>
I >>
I >>>
ANSI
51
50/51
50
Protezione di guasto a terra:
Soglia bassa
Soglia alta
IEC ANSI
I0 > 51N
I0 >> 50N/51N
Le curve di intervento per il sovraccarico (51) sono di tipo a tempo inverso: il ritardo di apertura è tanto più breve quanto più è intensa la sovracorrente.
La curva di intervento per corto circuito (50) ha un ritardo fisso, che può assumere diverse
soglie per ottenere la selettività.
Le curve riportano normalmente in ascisse il valore efficace sinusoidale della sovracorrente,
oppure il rapporto fra questo valore e il valore nominale In; in ordinate il tempo di intervento.
Normalmente la funzione di protezione per sovraccarico (51) è disponibile in tre famiglie di
curve:
Tempo inverso (NI = Normally Inverse)
Tempo molto inverso (VI = Very Inverse)
Tempo estremamente inverso (EI = Extremely Inverse)
Il valore di soglia di questa protezione a tempo inverso viene indicato con (I >), mentre il relativo tempo d'intervento è indicato con (t >). La Norma IEC 60255 prevede una relazione che
lega i valori del tempo (t >) e della corrente (I >):
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
18 - Relè elettronici e sensori
(t > ) = K
β
[ I /( I >)]α − 1
(4.4)
Dove I è corrente effettiva di sovraccarico, (I >) è la corrente di soglia (t >) è il tempo di intervento, α e β sono le costanti che definiscono il tipo di caratteristica, K è il fattore moltiplicativo del tempo di intervento.
Questi parametri possono essere impostati in sede di predisposizione del relè per ottenere la
caratteristica di interesse (vedi fig.4.1).
Fig.4.1 - Curve a tempo inverso (NI, VI ed EI).
La protezione a tempo inverso utilizza normalmente i valori efficaci della componente fondamentale di corrente. Talvolta, per i valori di corrente più elevati, la protezione lavora sul valore di picco del segnale.
La funzione di protezione per corto circuito (50) lavora normalmente sul valore di picco e impiega curve a tempo indipendente regolabile (DT = Definite Time).
Il valori di soglia di questa protezione a tempo definito sono indicati con (I >>) e (t >>) oppure (I >>>) e (t >>>).
Quando l’intensità della corrente che fluisce attraverso il relè di massima corrente è minore di
qualunque soglia impostata sul relè, allora siamo in condizioni di esercizio ordinario e gli
sganciatori dell’interruttore sono permanentemente chiusi mantenendo la linea alimentata.
Quando la protezione rileva una corrente che rientra nel campo di intervento del relè, si attiva
il contatore che misura il tempo di ritardo fino al comando di scatto che provoca l’apertura
degli sganciatori.
La manovra di sgancio viene eseguita grazie alle molle che erano state precedentemente caricate e che vengono liberate allo scatto. Il tempo fisico di apertura dell’interruttore è stabilito
dal carico delle molle e dall’inerzia delle parti mobili e risulta dell’ordine di qualche decina di
millisecondi in relazione alle dimensioni dell’apparecchiatura.
In Fig.4.2 si riporta l’andamento temporale della corrente durante l’intervento del relè per sovraccarico. Si parte dalla corrente I1 minore della corrente nominale di taratura e dunque ammessa per un tempo indefinito.
Quando inizia una sovracorrente I2, il relè attiva il tempo di ritardo, corrispondente alla curva
di intervento, dopo il quale il relè scatta, interrompendo la sovracorrente.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 19
Fig.4.2 - Instaurarsi ed estinzione della sovracorrente.
In caso di cortocircuito intenso, come sappiamo, si può verificare la saturazione dei TA induttivi. Tuttavia in questi casi, non è necessario disporre di una corretta ricostruzione di tutta la
forma d’onda di corrente.
Infatti già i valori istantanei iniziali della corrente possono superare il valore impostato (di
picco) per lo scatto istantaneo. In pratica è sufficiente che sia riprodotta correttamente solo la
prima porzione dell’onda.
In questi casi, gli algoritmi RMS o DFT non si possono applicare , perché non si può riprodurre
un periodo completo della forma d’onda.
In molti casi il sistema di protezione viene consegnato dal Costruttore al Cliente abbinando in
fabbrica il relè e i riduttori di tensione e corrente e fornendo anche il servizio di programmazione software degli algoritmi, in relazione al tipo di protezione che si vuole ottenere.
5 - Sensori
I sensori
I sensori sono un’alternativa ai TA e TV magnetici con il nucleo in ferro e hanno un comportamento intrinsecamente lineare.
Infatti i sensori non hanno parti in ferro e sono basati su altri principi di funzionamento.
Per esempio, nei sistemi di potenza in Media Tensione MT, i sensori di corrente più diffusi si
basano sulle bobine di Rogowski mentre i sensori di tensione si basano su partitori resistivi
oppure capacitivi.
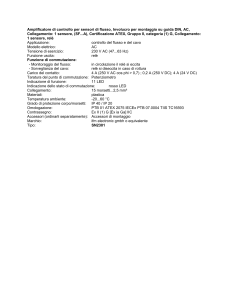
Bobina di Rogowski
La bobina di Rogowski è formata da numerose spire (N) avvolte in aria sopra un sostegno di
materiale plastico (dunque non ferromagnetico) e di forma toroidale, con sezione S (vedi
Fig.5.1).
All’interno del toroide passa il conduttore che porta la corrente i1(t) che si vuole rilevare.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
20 - Relè elettronici e sensori
Fig.5.1 - Bobina di Rogowski.
Per un TA induttivo la corrente primaria i1 è proporzionale alla corrente secondaria i2 con il
rapporto nominale KIn:
i1(t ) = K Ini2 (t )
(5.1)
Per la bobina di Rogowski invece il segnale di interesse è la tensione indotta sul toroide v2(t):
v2 (t ) =
dΦ c
dμ HS
S di1
di
=N 0
= N 2μ0
=M 1
dt
dt
l dt
dt
⇒ i1 (t ) =
1
v2 (t )dt
M∫
(5.2)
Essendo M il coefficiente di mutua induzione, che dipende dal numero di spire N e dalla caratteristiche geometriche del toroide (sezione S, lunghezza media l) e permeabilità dell’aria
μ0. Dunque si ricava la corrente di interesse i1(t) integrando la tensione indotta v2(t), vedi
Fig.5.2. Per esempio, se consideriamo un segnale di corrente i1(t) con andamento a onda quadra, l’uscita della bobina di Rogowski è una tensione v2(t) formata da un treno di impulsi bipolari (indicati in colore grigio), in corrispondenza delle transizioni del segnale.
Ma la loro integrazione restituisce in uscita una tensione vout(t) che riproduce l’onda quadra di
corrente i1(t). La relazione vale fra i valori istantanei. Nella Fig.5.2 l’integratore analogico è
realizzato con un amplificatore operazionale controreazionato da una capacità C.
Fig.5.2 - Esempio: corrente i1(t) a onda quadra;
uscita del sensore v2(t) e dell’integratore vout(t).
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Relè elettronici e sensori - 21
Per evitare l’influenza dei campi magnetici esterni sull’avvolgimento di misura, dove si induce la tensione utile secondaria v2(t), si pone (all’interno del toroide) una spira avvolta in senso
contrario rispetto alle N spire dell’avvolgimento principale (vedi Fig.5.3).
In tal modo un campo magnetico variabile H, ortogonale al piano della bobina (cioè al piano
del foglio), induce due tensioni uguali ed opposte nella maglia del circuito.
Fig.5.3 - Spira di compensazione per le interferenza da campi magnetici esterni (a sinistra).
Circuito equivalente delle spire effettive e di quella di compensazione (a destra).
Grazie all’assenza di saturazione e quindi all’ampio campo di lavoro, un unico sensore di corrente può avere sia funzioni di misura che di protezione (vedi Fig.5.3).
Invece, impiegando i classici TA induttivi, era necessario prevedere diversi avvolgimenti, ciascuno con il proprio campo di funzionamento. Tuttavia i sensori, a causa dell’elevato range
dinamico, devono avere una risoluzione elevata e devono poter riprodurre con sufficiente accuratezza tutte le fasce di funzionamento, anche le più piccole.
Fig.5.3 - Caratteristiche ingresso-uscita dei sensori e dei trasformatori.
Partitori di tensione ohmico-capacitivi
I partitori di tensione possono essere sia resistivi che capacitivi (Fig.5.4).
vout , R (t ) =
R2
vin (t )
R1 + R2
© 2014, Nicola Locci
e
vout ,C (t ) =
C1
vin (t )
C1 + C2
(5.3)
Misure sui Sistemi di Potenza
22 - Relè elettronici e sensori
Fig.5.4 - Partitori di tensione.
Per esempio, consideriamo un partitore resistivo con R1 = 250 MΩ e R2 = 25 kΩ; la tensione
in ingresso vin è attenuata di 10.000 volte:
vout , R (t ) =
25 kΩ
v (t )
vin (t ) ≅ in
250 MΩ + 25 kΩ
10.000
(5.5)
Nella pratica si costruiscono anche partitori di tipo ohmico-capacitivo, per ottenere la compensazione del comportamento in frequenza ed avere così una banda passante più ampia.
Sensori combinati
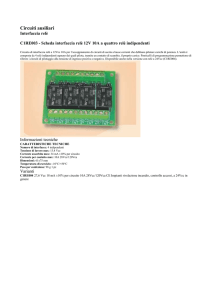
Le bobine di Rogowski e i partitori di tensione sono spesso combinati un un’unica apparecchiatura robusta compatta e affidabile (sensori Combi) che lavora come trasduttore di corrente
e di tensione. Inoltre l’ingombro di un sistema trifase Combi è molto minore di quello dei
classici trasformatori TA e TV induttivi con i relativi accessori e dunque consente di ridurre le
dimensioni delle celle dei quadri elettrici.
Fig.5.5 - Bobina di Rogowski e partitore (a sinistra).
Sensori Combi (a destra).
Nota
Un TA alimentato al primario produce delle sovratensioni al secondario, quando rimane aperto. Viceversa, una bobina di Rogowski, funziona normalmente a vuoto è non presenta problemi in corto circuito.
Un TV alimentato al primario non deve andare in cortocircuito al secondario. Viceversa, un
partitore di tensione con l’uscita in corto circuito ha una corrente limitata naturalmente dalla
impedenza maggiore a monte ZC1.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci