AIAS – ASSOCIAZIONE ITALIANA PER L’ANALISI DELLE SOLLECITAZIONI
41° CONVEGNO NAZIONALE, 5-8 SETTEMBRE 2012, UNIVERSITÀ DEGLI STUDI DI PADOVA
AIAS 2012 - 073
PROGETTAZIONE DI ENERGY HARVESTERS VIBRAZIONALI
PER IL MONITORAGGIO DI SISTEMI MECCANICI
A. Somà, G. De Pasquale
Politecnico di Torino – Dipartimento di Ingegneria Meccanica e Aerospaziale,
Corso Duca degli Abruzzi 24, 10129 Torino,
e-mail: [email protected], [email protected].
Sommario
La progressiva riduzione dei consumi di potenza dei più recenti sensori e dispositivi di misura rende
possibile la sostituzione dei tradizionali sistemi di alimentazione via cavo con generatori elettrici
compatti e integrati per l’alimentazione in loco di reti di sensori. Queste sistemi innovativi sono
oggetto di numerose e recentissime ricerche volte alla ideazione di sistemi di recupero energetico
dall’efficienza crescente riconducibili alla definizione di energy harvesting, dotati di caratteristiche
dinamiche versatili e in possesso di principi di trasduzione elettro-meccanica appropriati per la
specifica applicazione. In questa memoria, con particolare riferimento ai vibration energy harvester, si
illustrano le proprietà e le caratteristiche dei principali sistemi di recupero energetico in base al
principio di funzionamento, si identificano le azioni progettuali più rilevanti e si mettono a confronto
le prestazioni di tipologie diverse di energy harvesters realizzati dal gruppo di ricerca.
Abstract
The progressive reduction of power consumption of the most recent sensors and measuring devices,
makes possible to replace the traditional supply by cables with wireless compact integrated electric
generators; this allows the local power supply or wireless sensor networks. These strategies, linked to
the definition of energy harvesting, are the topic of a number of researches addressed to the invention
of systems with increasing efficiency, with versatile dynamic properties and based on electromechanical transduction principles appropriate for the specific application. This paper illustrates the
properties and characteristics of the main system for vibration energy harvesting depending to the
working principle. Then the more relevant design actions realized by the research group are described
and the performances of different harvesters typologies are compared.
Parole chiave: energy harvesting, monitoraggio strutturale, diagnostica, comportamento dinamico,
efficienza di conversione.
1. INTRODUZIONE
L’energia inutilizzata è presente ovunque nell’ambiente che ci circonda: luce, vento, differenze di
temperatura, onde a radiofrequenze, energia cinetica dalle onde del mare, dalle vibrazioni dei sistemi
meccanici e dal movimento umano. La conversione dell’energia dispersa nell’ambiente in energia
elettrica viene definita “energy harvesting”, dall’inglese “mietere energia”, o alternativamente “power
scavenging” che significa letteralmente “cercare l’energia di scarto”. A causa delle piccole potenze in
gioco l’energy harvesting si riferisce in particolare alle tecnologie a bassissimo consumo. Catturare
l’energia direttamente dall’ambiente non solo rappresenta una valida alternativa all’uso delle batterie e
al cablaggio, ma apre scenari finora impensabili sulle possibili applicazioni dei dispositivi mobili.
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
La realizzazione di questi sistemi renderà possibile l’impiego dei sensori wireless in una grande
varietà di applicazioni: monitoraggio industriale e strutturale, assistenza medica remota, domotica,
equipaggiamento militare, sorveglianza, tracciamento dei flussi di materiali, logistica e trasporti,
monitoraggio dell’efficienza energetica. Senza l’energy harvesting risulterebbe infatti impossibile
cablare sensori in diversi punti delle strutture. Un altro esempio è dato dai recenti sviluppi della
telemedicina e del monitoraggio dei parametri biologici. Efficaci harvester miniaturizzati ed
indossabili permetterebbero di monitorare costantemente pazienti affetti da patologie croniche
mediante sensori indossabili che non necessitano di batterie. Per questi motivi l’interesse per l’energy
harversing negli ultimi anni è cresciuto enormemente sia in ambito accademico sia industriale [1-3].
Nel presente lavoro sono messi a confronto diversi sistemi di recupero di energia cinetica dalle
vibrazioni. Il gruppo di ricerca, afferente al Dipartimento di Ing. Meccanica e Aerospaziale del
Politecnico di Torino, è attivo da alcuni anni nello sviluppo di prototipi di energy harvesters
miniaturizzati, sia per quanto riguarda il dimensionamento dinamico e le strategie di sintonizzazione
della risonanza, sia in merito agli aspetti elettronici circuitali per la generazione di corrente continua
per alimentare reti di sensori. In precedenti lavori gli autori hanno analizzato le prestazioni di energy
harvesters piezoelettrici [4], induttivi [5], capacitivi e a levitazione diamagnetica [6]. Il gruppo di
ricerca ha inoltre all’attivo la pubblicazione di alcuni brevetti sull’argomento [7-9].
Nel presente lavoro i risultati dell’attività di simulazione e sperimentazione dei diversi energy
harvesters sono confrontati in termini di energia prodotta per unità di volume. Sono quindi analizzate
dal punto di vista progettuale alcune soluzioni di integrazione di dispositivi per energy harvesting per
applicazioni di monitoraggio di veicoli e sistemi meccanici. In seguito al confronto tra le diverse
strategie di conversione, due diverse tipologie/applicazioni su sistemi meccanici sono messe a
confronto al fine di ottenere indicazioni progettuali di sistema.
2. PRINCIPALI STRATEGIE DI CONVERSIONE DELL’ENERGIA VIBRAZIONALE
L’energia cinetica associata alle vibrazioni ambientali viene efficacemente sfruttata dai più comuni
dispositivi di conversione per eccitare l’oscillazione di una massa sismica dotata di inerzia, alla quale è
collegato il trasduttore. Il moto indotto sulla massa sismica viene modulato in ampiezza, frequenza e
fase al fine di massimizzare l’efficienza di conversione; i principi di conversione principali sono tre:
piezoelettrico, magnetico-induttivo e capacitivo (tabella 1).
Tabella 1: Alcune tipologie di energy harvesters.
Di seguito si illustrano le principali caratteristiche di ciascuno dei tre metodi di conversione.
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
2.1. Vibration Energy Harvester piezoelettrici
In questa tipologia di generatori, la massa sismica induce la deformazione di un componente di
materiale piezoelettrico il quale, a seguito della deformazione meccanica, determina una differenza di
potenziale agli elettrodi. Il funzionamento di questo trasduttore è limitato ai regimi dinamici e alcuni
problemi di affidabilità sono riscontrabili in letteratura in relazione alla natura fragile dei materiali
piezoelettrici impiegabili (PZT, PVDF, etc.). Siccome la potenza elettrica generata è funzione del
carico resistivo applicato al trasduttore, è necessaria una caratterizzazione preliminare del generatore
tenendo in conto l’impedenza del circuito elettronico di condizionamento ad esso collegato. Altra
problematica è legata alla forma d’onda in uscita, caratterizzata da sinusoidi di tensione e di corrente
leggermente sfasate fra loro proporzionalmente alla capacità elettrica del materiale piezo; questo causa
una riduzione della potenza utile direttamente disponibile in output rispetto a quella ottenibile
mediante una rifasatura preliminare di tensione e corrente per via elettronica, non senza complicazioni
circuitali. Alcune problematiche sono inoltre associate alla natura della potenza elettrica generata, che
tipicamente si compone di elevati livelli in tensione e di bassi valori in corrente. Siccome l’architettura
dei sistemi di energy harvesting prevede quasi sempre la presenza di una batteria tampone a valle del
generatore, risulta particolarmente svantaggioso effettuare la carica di quest’ultima prima di
un’operazione di innalzamento della corrente, da effettuare mediante un trasformatore.
I punti di forza dei generatori piezoelettrici sono legati alla disponibilità commerciale di trasduttori
pronti (o quasi) per l’integrazione nel sistema di harvesting, così come sono legati ai buoni valori di
potenza generata per unità di volume. Dal punto di vista dinamico queste tipologie di harvester
possono essere applicati in un range di frequenze moderatamente elevato e tipico delle vibrazioni
strutturali ad esempio agendo sulla rigidezza dell’elemento deformabile o sulla massa sismica. Meno
immediate sono le operazioni di sintonizzazione variabile legata al regime di funzionamento e dalla
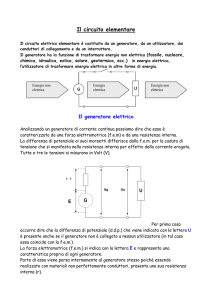
larghezza di banda. Un esempio di generatore piezoelettrico è riportato in Fig. 1.
Figura 1: Generatore piezoelettrico [10]: dimensioni 10x10x1 mm3, potenza generata di 60 µW in
condizioni di risonanza (572 Hz) e accelerazione pari a 2 g.
2.2. Generatori magnetico-induttivi
In questo caso l’energia vibrazionale esterna è utilizzata per indurre un moto relativo fra un magnete
permanente e un avvolgimento; le configurazioni presenti in letteratura sono numerosissime e possono
contemplare magnete fisso e avvolgimento mobile oppure, più frequentemente, magnete oscillante. Il
dimensionamento del generatore include la corretta scelta del diametro e del numero di spire
dell’avvolgimento, quantità proporzionali alla corrente indotta nel filo ma anche alla resistenza
elettrica del filo stesso, proprietà fra loro concorrenti che identificano in genere una soluzione di
ottimo. Altri parametri cruciali sono quelli relativi alla scelta del materiale magnetico e alle
dimensioni del magnete stesso. L’opzione più ovvia prevede di adottare magneti con campo indotto
elevato, orientando la scelta sui magneti a ‘terre rare’ come il NdFeB. I principali vantaggi dei
generatori magnetico-induttivi sono legati alla stabilità delle prestazioni, all’elevata affidabilità e,
soprattutto, all’elevato rapporto corrente/tensione che rende particolarmente agevole la ricarica di
batterie tampone anche senza trasformatori intermedi. Di contro, risulta piuttosto complicato
introdurre sistemi di sintonizzazione variabile del generatore, la cui frequenza di risonanza è perlopiù
imposta dalla massa del magnete oscillante e dalla rigidezza delle sospensioni cui esso è collegato.
Inoltre, il raggiungimento di elevati livelli di potenza generata è legato alla velocità di oscillazione del
magnete; tale condizione è dettata dal legame fra corrente indotta e variazione del campo magnetico
concatenato alle spire dell’avvolgimento e richiede pertanto valori di corsa del magnete non troppo
ridotti. Un valido metodo per ridurre la frequenza propria di questi generatori senza dover accrescerne
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
troppo le dimensioni consiste nella riduzione della rigidezza delle sospensioni; ad esempio utilizzando
la forza di repulsione magnetica fra il magnete oscillante e un secondo magnete posto al di sotto di
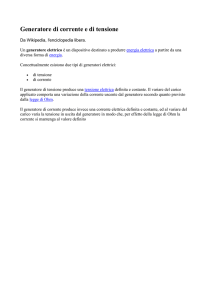
esso in modo che i due lati affacciati mostrino la medesima polarità.
Figura 2: Generatore magnetico-induttivo [11]: dimensioni 54x46x15 mm3, potenza generata di 0.55
mW alla frequenza di 9.25 Hz e con accelerazione pari a 0.8 g.
2.3. Generatori capacitivi
I generatori capacitivi sono assimilabili a condensatori ad armature mobili in cui lo spostamento
relativo fra le armature stesse, indotto dalla vibrazione esterna, viene sfruttato per generare una
differenza di potenziale o di carica elettrica seconda delle modalità di collegamento circuitale. La
potenza elettrica generata è fortemente dipendente dalla geometria del condensatore: in particolare
sono molto favorevoli piccole distanze fra le armature e, in linea teorica, elevate superfici delle stesse.
Tuttavia, al fine di produrre energia utile, è necessario applicare un precarico elettrico al condensatore
variabile (ovvero una tensione di bias) il quale è particolarmente dannoso per l’efficienza globale del
generatore. Si preferisce quindi adottare superfici molto ridotte delle armature proprio per ridurre al
minimo l’energia spesa per il loro precarico. Di fatto quindi, l’applicazione dei generatori capacitivi è
limitata alle scale dimensionali più piccole e alcuni esempi sono disponibili nell’ambito dei MEMS
(micro electro-mechanical systems), mentre per scale dimensionali più grandi l’efficienza viene
pesantemente penalizzata rendendo questa soluzione poco vantaggiosa.
Quanto detto riflette i maggiori svantaggi legati ai generatori capacitivi, unitamente al fatto che le
ridotte dimensioni sono inevitabilmente associate a elevate frequenze operative, difficilmente
abbinabili ad ambienti vibratori consueti per la meccanica delle macchine. Di contro, nell’ambito della
microscala, la tecnologia necessaria a realizzare questi generatori (surface micromachining) è
consolidata e possono essere ottenute buone soluzioni costruttive. Recentemente, inoltre, è stata
dimostrata la possibilità di applicare particolari materiali (detti electret) sulle superfici del
condensatore variabile; si tratta sostanzialmente di materiali elettricamente carichi in grado di
preservare la loro carica in modo stabile e per tempi molto lunghi rispetto alla durata di vita del
generatore; questa innovazione consente di eliminare il precarico elettrico invece necessario nei
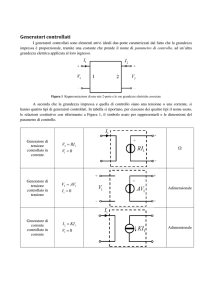
tradizionali harvesters capacitivi, con conseguenti benefici sull’efficienza globale. In Figura 3 è
riportato un esempio di generatore capacitivo MEMS e di un generatore con electret.
a)
b)
Figura 3: (a) Generatore capacitivo [12] comprensivo di una massa sismica sferica in tungsteno
(diametro 4 mm) per la riduzione della frequenza di risonanza a 120 Hz (potenza generata: 31 µW a
0.23 g). (b) Generatore capacitivo con electret [13] (potenza generata: 1 µW a 63 Hz e 2 g).
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
3. POWER SPECTRAL DENSITY, SINTONIZZAZIONE E LARGHEZZA DI BANDA
Dal punto di vista metodologico, la prima analisi da effettuare nel dimensionamento dell’harvester
riguarda la natura del segnale vibrazionale di eccitazione disponibile. Generalmente si tratta di segnali
di tipo random in quanto associati a macchine o sistemi dotati di règimi di funzionamento variabili: si
pensi ad esempio a veicoli in marcia a velocità diverse oppure a velivoli in differenti condizioni di
volo. L’energia media disponibile è valutabile, ad esempio, analizzando i livelli di accelerazione
associati alle varie condizioni di esercizio e, in particolare, il range entro cui tali valori si collocano. A
partire dalla stima della quantità di energia disponibile è possibile individuare la taglia del generatore
o, più precisamente, delle sue parti oscillanti. Una stima preliminare permette di dimensionare le
masse e le rigidezze in funzione del rapporto fra ampiezza dell’eccitazione e ampiezza della risposta,
fino a un dimensionamento di massima adeguato.
Il passo successivo riguarda l’analisi della distribuzione dell’energia nello spettro delle frequenze;
poiché la macchina o sistema esterno è governato da fenomeni dinamici che comprendono risonanze e
accoppiamenti modali, è presumibile che per alcune frequenze di vibrazione l’oscillazione
dell’ambiente esterno sia amplificata. Proprio in queste condizioni di risonanza si osserva
l’amplificazione dell’energia erogata dal sistema vibrante. La descrizione della distribuzione di
energia nel dominio delle frequenze è ben descritta dalla funzione di densità spettrale di potenza (PSD,
power spectral density). Il dimensionamento dell’harvester deve necessariamente tenere conto della
PSD dell’ambiente.
La sintonizzazione del generatore consiste nel modificare quei parametri (di massa e rigidezza) in
precedenza definiti in modo approssimato. La scelta di tali parametri avviene solitamente in modo
univoco in fase di progettazione, senza prevedere la possibilità di modificarli in seguito: questo
approccio è il più semplice e si adatta ad ambienti con una certa regolarità di vibrazione e con una
PSD ben definita. Talvolta però i règimi di funzionamento sono talmente variabili e la quantità di
energia associata alle vibrazioni è talmente scarsa che si rende necessario introdurre nel design
dell’harvester sistemi in grado di effettuare una sintonizzazione variabile dello stesso durante il suo
funzionamento. Queste soluzioni costruttive richiedono intense attività di ottimizzazione dei consumi
e di prove sperimentali poiché l’energia assorbita dal sistema di tuning deve essere contenuta entro
valori rigidamente prefissati. Esempi si sistemi di sintonizzazione di tipo fisso sono la replicazione di
vettori di strutture vibranti con differenze dimensionali, la variazione della rigidezza mediante
applicazione di precarichi, l’introduzione di masse aggiuntive, etc. Esempi di sistemi di tuning
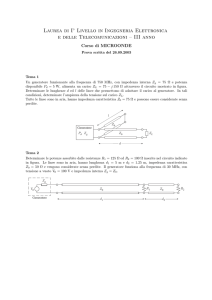
variabili sono vincoli mobili, masse mobili, forze esterne (ad esempio magnetiche) variabili, etc.
Mass 1
Mass 2
K₁₂
Mass 3
K₂₃
Figura 4: Esempio di strategia per l’amplificazione della larghezza di banda applicata su generatore
capacitivo mediante accoppiamento delle deformate modali.
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
Un ultimo aspetto, non meno importante dei precedenti, riguarda la larghezza di banda del generatore.
Dal punto di vista dinamico, gli harvesters vibrazionali si comportano come filtri, inquanto ricevono
un segnale di eccitazione che forza un sistema oscillante dotato di una dinamica propria tale da
produrre una specifica risposta. La risposta del generatore è direttamente responsabile dell’energia
generata poiché essa eccita il trasduttore elettro-meccanico, quale che sia. E’ evidente che un
generatore identificabile come un filtro a banda larga è molto più prestante di uno a banda stretta
poiché il primo sarà in grado di intercettare l’energia associata alla forzante esterna in un range di
frequenze più ampio. In caso di forte variabilità della frequenza di eccitazione, equivalente a una PSD
molto distribuita, un harvester a banda larga è il più indicato. Anche in questo caso i metodo di
amplificazione della larghezza di banda sono molteplici, i più diffusi sono l’accoppiamento modale di
più trasduttori (Figura 4), l’accoppiamento in serie di generatori multipli e l’adozione di strutture
bistabili.
4. ARCHITETTURA DEL SISTEMA E TEMPO CICLO
Il dimensionamento del generatore non può prescindere dalla conoscenza dettagliata del sistema a
valle che deve essere alimentato mediante l’energia estratta. E’ quindi necessario parlare di
progettazione del sistema autoalimentato piuttosto che dell’harvester, includendo quindi i parametri
elettrici dei dispositivi utilizzatori. La definizione di un’architettura efficiente e funzionale del sistema
autoalimentato è alla base del funzionamento del sistema stesso. Anche se la tipologia dei componenti
e alcune delle loro funzioni possono variare fra le applicazioni, generalmente si constata la presenza di
alcuni blocchi funzionali costanti, quali: un raddrizzatore di corrente, una riserva di carica (batteria
tampone), uno o più dispositivi di misura (sensori), un sistema di trasmissione o di ricetrasmissione. E’
consigliabile prevedere che l’energia generata dall’harvester, prima di essere utilizzata, sia
immagazzinata nelle batterie tampone (previa trasformazione della corrente da alternata a continua);
questa operazione, seppur dispendiosa in termini energetici, è spesso indispensabile per alcune ragioni,
fra cui garantire una continuità dell’alimentazione svincolandola dalle irregolarità di generazione
dell’harvester e raggiungere un livello di energia adeguato per alimentare gli utilizzatori.
Figura 5: Tempo ciclo (Tc) comprensivo di tempo di stand-by del sistema (Ts), tempo di misura e
immagazzinamento dei dati (Tm) e tempo di trasmissione dei dati compressi (Tt).
L’energia prodotta dall’harvester e immagazzinata nelle batterie può essere utilizzata per le operazioni
di alimentazione solamente quando (e se) viene raggiunta una soglia minima di accumulo tale da
soddisfare il fabbisogno energetico degli utilizzatori; anche la durata dell’alimentazione è funzionale
all’energia consumata nell’unità di tempo. Questi vincoli sono tenuti in conto nella definizione del
tempo ciclo (duty cycle) del sistema autoalimentato, il quale viene stimato appunto in funzione del
valore di ciascuno dei parametri sopracitati. Risulta vitale per il funzionamento del sistema
autoalimentato l’adozione di accorgimenti necessari a contenere i consumi attraverso operazioni di
power management quali, ad esempio, l’attivazione delle funzionalità solo al di sopra di una soglia
prefissata (triggering) o lo spegnimento dell’antenna nelle fasi di misura e processamento dei dati.
5. ANALISI SPERIMENTALI E CONFRONTO PRESTAZIONALE
La misura delle prestazioni di alcune tipologie di generatori piezoelettrici e magnetico-induttivi è
condotta mediante prove al banco con shaker e con controllo della forzante e della risposta dinamica.
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
La risposta dei generatori è modificata mediante operazioni di sintonizzazione della risonanza,
ottenute modificando la massa sismica oppure la rigidezza delle parti deformabili. Diversi valori di
accelerazione sono imposti al fine di verificare la variazione della risposta elettro-meccanica. Il banco
prova per le caratterizzazioni sperimentali dei generatori è realizzato secondo lo schema seguente
(Figura 6).
Figura 6: Schema del banco prova per la caratterizzazione sperimentale dei generatori.
5.1. Generatori piezoelettrici
In Figura 7 sono rappresentati due esempi di generatore piezoelettrico; il primo (Figura 7a) è un
prodotto commercializzato da Cedrat Technologies per applicazioni in ambito aeronautico [14],
mentre il secondo (Figura 7b) è un prototipo di laboratorio realizzato dagli autori per il recupero di
energia dai veicoli su rotaia per mezzo del trasduttore DuraAct P-876.A12 [4]; le caratteristiche
principali sono riassunte in Tabella 2.
Il generatore commerciale è costituito da due blocchi piezoelettrici inseriti in un frame metallico che,
in presenza di vibrazioni ambientali, a causa della sua deformazione modale, impone una
sollecitazione di trazione-compressione al trasduttore elettro-meccanico. Il design del generatore è tale
da associare alla struttura una rigidezza non trascurabile (100 N/mm dichiarata) e, di conseguenza,
portare la frequenza di risonanza a valori prossimi ai 400 Hz. Il prototipo di laboratorio, al contrario, è
basato sulla deformazione a flessione del trasduttore: questa configurazione permette di massimizzare
il rapporto fra deformazione del materiale e forza esterna applicata e consente di ridurre
considerevolmente la rigidezza del generatore a valori prossimi a 0.06 N/mm e la frequenza di
risonanza a circa 27 Hz. In questo caso lo svantaggio è la potenziale minore affidabilità del materiale
fragile che costituisce il trasduttore, soggetto a comportamento a fatica; tuttavia il rivestimento
polimerico con cui la lamina piezo viene commercializzata ha mostrato effetti molto benefici sulla
durata di vita del componente (oltre 106 cicli con accelerazione 1 g).
a)
b)
Figura 7: (a) Generatore piezoelettrico a trazione-compressione VEH-APA 400M-MD (Cedrat
Techologies); (b) prototipo di generatore a flessione realizzato con trasduttore DuraAct P-876.A12.
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
Tabella 2: Alcune proprietà dei generatori piezoelettrici
Dimensioni (mm)
Capacità (nF)
Carico di ottimo (kΩ)
Freq. risonanza (Hz)
Generatore Cedrat
48x13x10
3150
0.47
405
Prototipo di laboratorio
60x35x0.5
90-150
200
27
La caratterizzazione preliminare del generatore piezoelettrico è rivolta all’individuazione del carico
resistivo di ottimo, per il quale la potenza in uscita è massima; tale valore sarà utilizzato in seguito
come riferimento per la progettazione dell’elettronica di controllo, le cui funzioni sono principalmente
la rettificazione della corrente prodotta, il livellamento di tensione e corrente alle soglie imposte dalla
batteria, la gestione della batteria ed eventualmente la preliminare fasatura fra tensione e corrente. I
risultati di questa caratterizzazione di carico sono riportati in Figura 8.
a)
b)
Figura 8: Caratterizzazione del carico elettrico di ottimo nei due generatori. (a) Generatore
commerciale: prova eseguita in risonanza (405 Hz) con accelerazione pari a 1.4 g. (b) Prototipo:
prova eseguita in risonanza (5.71 Hz) in presenza di massa sismica (36.6 g) applicata in punta con
accelerazione pari a 1.4 g e due lamine piezo di diversa capacità (90 e 150 nF).
a)
b)
Figura 9: Potenza di output prodotta dal generatore commerciale in funzione della frequenza di
attuazione (a) e dal prototipo di laboratorio in funzione del carico resistivo in condizioni di risonanza
(b) al variare della massa sismica.
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
In Figura 9 sono rappresentate le curve di potenza riferite ai due generatori piezoelettrici; si nota come
la variazione della massa sismica consenta di sintonizzare la risonanza dell’harvester su valori di
frequenza sensibilmente diversi nel primo caso. Nel secondo caso si osserva come la particolare
conformazione del trasduttore sia particolarmente sensibile al rapporto massa sismica/deformazione a
parità di accelerazione di ingresso; in questo caso tutte le misure sono riferite alla risonanza del
sistema. Questo tipo di soluzioni sono state valutate nel caso applicativo di vibrazioni meccaniche in
strutture bidimensionali come i pannelli di rivestimento strutturale di veicoli di grandi dimensioni.
5.2. Generatori magnetico-induttivi
In figura 10 sono riportati lo schema costruttivo e l’immagine del prototipo del generatore magnetico
induttivo realizzato dagli autori e preliminarmente descritto in [5]. In questa tipologia di harvester la
scelta delle dimensioni e dei materiali dei componenti è vincolante sia rispetto alla potenza elettrica sia
rispetto alla sintonizzazione del sistema. La sospensione magnetica che regola la rigidezza del
trasduttore è infatti determinata dalla intensità del campo magnetico prodotto dai due magneti
permanenti; allo stesso modo la corrente elettrica indotta nell’avvolgimento è proporzionale alla
dimensione del magnete oscillante e alla sua velocità relativa, che a sua volta risulta essere funzione
della rigidezza della sospensione. E’ quindi evidente che il dimensionamento è reso assai complesso
sia dall’accoppiamento elettro-meccanico stretto che caratterizza il generatore, sia come già accennato
in precedenza alla variabilità di frequenza e accelerazione della forzante identificati dallo spettro di
quest’ultima.
a)
b)
Figura 10: Prototipo di generatore magnetico-induttivo: schema costruttivo (a) e immagine del
dispositivo per applicazioni ferroviarie [9] (b).
a)
b)
Figura 11: Caratteristiche di output elettrico del generatore a 4 avvolgimenti (3.2 Hz, 0.12 g): tensione
e corrente (a) e potenza generata (b).
41° CONVEGNO NAZIONALE – VICENZA, 5-8 SETTEMBRE 2012
Sono stati realizzati anche modelli analitici ed agli elementi finiti per valutare le caratteristiche della
sospensione magnetica. La finalità delle prove di caratterizzazione al banco è quella di ottenere
diagrammi e curve caratteristiche di funzionamento utili alle successive fasi di progettazione del
generatore nell’ambito di precise specifiche di funzionamento. Alcuni risultati delle prove di
caratterizzazione sono descritti dalle Figura 11 a,b. Questa tipologia di soluzioni sono state valutate
nel caso applicativo di strutture e componenti di veicoli, quali boccole di carrelli ferroviari [7], assili di
veicoli industriali [9], bracci telescopici e macchine da lavoro ed attrezzature sportive [8], in cui il
range di frequenze è concentrato alle basse frequenze.
6. CONCLUSIONI
Nella presente memoria si sono illustrate le principali metodologie per la progettazione di energy
harvesters vibrazionali. In particolare è evidenziata la necessità di un approccio sistemistico tale da
considerare il dispositivo di diagnostica autoalimentato nella sua complessità, senza trascurare la fonte
di energia esterna e il fabbisogno dei sensori connessi e della trasmissione del segnale. Dal punto di
vista del bilancio energetico risulta di fondamentale importanza il concetto di tempo ciclo e di
sintonizzazione del sistema. Quest’ultimo aspetto, insieme alle specifiche di amplificazione della
larghezza di banda e di amplificazione della risposta, necessita di particolare attenzione nella scelta
della tipologia di harvester e nel dimensionamento sia della dinamica del sistema che dell’interfaccia
elettro-meccanica.
BIBLIOGRAFIA
[1] S. Roundy, On the effectiveness of vibration-based energy harvesting, Journal of Intelligent
Materials and Structures, 16, 809-823 (2005).
[2] S. Roundy, P.K. Wright, J. Rabaje, “A study of low level vibrations as a power source for
wireless sensor nodes”, Computer Communications, 26, 1131-1144 (2003).
[3] S. Priya, D.J. Inman, Energy harvesting technologies, New York, Springer (2008).
[4] G. De Pasquale, A. Somà, F. Fraccarollo, “Piezoelectric energy harvesting for autonomous
sensors network on safety-improved railway vehicles”, Proceedings of the Institution of
Mechanical Engineers - Part C: Journal of Mechanical Engineering Science, 226 (2011).
[5] G. De Pasquale, N. Zampieri, “Progettazione di generatori elettro-meccanici con recupero di
energia cinetica vibrazionale a bordo di treni merci”, atti XL Convegno Nazionale AIAS, Palermo
(2011).
[6] G. De Pasquale, C. Siyambalapitiya, A. Somà, J. Wang, “Performances improvement of MEMS
sensors and energy scavengers by diamagnetic levitation”, proc. International Conference on
Electromagnetics in Advanced Applications (ICEAA), 465-468, Torino (2009).
[7] A. Somà, G. De Pasquale, “Device for diagnosing railway bogies by applying an energyautonomous measuring and transmitting bolt, and corresponding control method”.
WO2011/117718. Brevetto PCT. 29 settembre 2011.
[8] A. Somà, G. De Pasquale, F. Fraccarollo, “Racchetta da sci o trekking dotata di dispositivo
harvester magnetico-induttivo di generazione elettrica”. TO2011A000844. 22 settembre 2011.
[9] A. Somà , G. De Pasquale, ,”Sistema autoalimentato mediante harvester per monitoraggio ed
infomobilità di applicazioni veicolistiche multinodali wireless”. TO2011A000694, 2011
[10] R. Elfrink, T.M. Kamel, M. Goedbloed, S. Matova, D. Hohlfeld, Y. van Andel, R. van Schaijk,
“Vibration energy harvesting with aluminum nitride-based piezoelectric device”, Journal of
Micromechanics and Microengineering, 19, 094005 (2009).
[11] S. Cheng, D.P. Arnold, “A study of a multi-pole magnetic generator for low-frequency
vibrational energy harvesting”, Journal of Micromechanics and Microengineering, 20, 025015
(2010).
[12] Y. Chiu, V.F. Tseng, “A capacitive vibration-to-electricity energy converter with integrated
mechanical switches”, Journal of Micromechanics and Microengineering, 18, 104004 (2008).
[13] Y. Suzuki, D. Miki, M. Edamoto, “A MEMS electret generator with electrostatic levitation for
vibration-driven energy harvesting applications”, Journal of Micromechanics and
Microengineering, 20, 104002, (2010).
[14] http://www.cedrat-technologies.com.