I.P. “G. Marconi”
A.S.2016/2017
RETI INFORMATICHE
Una rete informatica è costituita da un insieme di dispositivi collegati tra di loro per la:
·
·
·
·
condivisione dei dati e delle applicazioni;
condivisione di un collegamento Internet unico per più dispositivi;
condivisione e accesso risorse hardware quali stampanti, fax, scanner, etc.;
gestione più efficiente dei dati, delle comunicazioni e delle pianificazioni.
Classificazione
1 - Per estensione
LAN
Local Area Network (rete locale) si estende in generale all’interno di uno stesso edificio o ad edifici
contigui (per distanze non superiore a un centinaio di metri).
Si tratta delle prime tipologie di reti informatiche realizzate al mondo per semplicità di realizzazione e
costi sostenibili anche da piccoli privati.
MAN
Metropolitan Area Network (rete metropolitana) si estende per una distanza di circa un centinaio di
chilometri; nacque per fornire servizi di tv via cavo alle città dove c'era una cattiva ricezione terrestre
(tramite antenna).
WAN
Wide Area Network (rete estesa) si tratta più precisamente di una rete di trasporto che può
connettere fra loro più reti locali e/o metropolitane collegate tra loro da una dorsale.
Molte WAN sono costruite per una particolare organizzazione e sono private come ad esempio la
rete GARR (rete universitaria dei centri di ricerca, che comprende per esempio il CNR e l’ENEA).
Internet, una rete di computer che copre l'intero pianeta, è invece ad accesso pubblico.
BGAN
Broadband Global Area Network (rete globale a banda larga via satellite, rete satellitare).
2 - Per topologia
Per topologia si intende il modo con cui sono collegati i dispositivi tra di loro, posso avere 3 diverse
topologie:
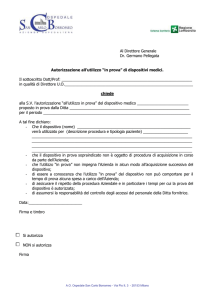
Bus
È la topologia più semplice, i dispositivi sono collegati tra
di loro attraverso un unico collegamento in cui un solo
dispositivo può trasmettere (inviare informazioni) e gli altri
dispositivi possono solo ricevere.
il problema principale di questo collegamento sorge
quando due o più dispositivi tentano di inviare informazioni
nello stesso momento creando un conflitto (perdita di
informazioni), ne consegue che le informazioni devono
essere ritrasmesse e quindi diminuisce la velocità di
trasmissione.
Prof. Giacomelli Filippo
1
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
Stella
: Nella configurazione più semplice è previsto un elemento
centrale (Router - dispositivo adatto a tutte le situazioni), il
compito del router è quello di smistare informazioni tra i
vari dispositivi.
i vantaggi di questo collegamento sono: bassa
complessità e costi costruttivi; possono comunicare tra
loro coppie di dispositivi contemporaneamente, una
maggiore velocità di trasmissione dei dati rispetto alla
topologia a bus.
Anello (Token Ring)
È la topologia più complessa delle tre in quanto necessita,
per ogni dispositivo collegato alla rete, di un elemento
supplementare chiamato ripetitore:
Questo ripetitore permette di eliminare la situazione in cui
due dispositivi tentano di trasmettere informazioni nello
stesso momento, in quanto è presente un segnale,
chiamato gettone, che viene “passato da ripetitore a
ripetitore” (in un unico senso di circolazione) e fa in modo
che solo il dispositivo che “ha il gettone” possa, se vuole,
trasmettere informazioni.
3 - Per mezzo trasmissivo
All’interno di un mezzo trasmissivo un segnale elettromagnetico si muove sempre alla velocità della
luce (c = 3 ▪ 108 m/s nel vuoto; VL,cu = 2 ▪ 108 m/s circa nel rame ) questa non va confusa con la
Banda (o velocità di trasmissione) che rappresenta il numero di bit ch vengono ricevuti in un secondo
e quindi si misura in bit/s (e i sui multipli).
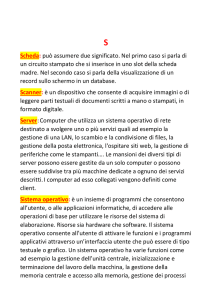
Doppino incrociato
Per doppino (o coppia bifilare) si intende una linea di
trasmissione composta da una coppia di fili di rame isolati
ritorti (twisted pair) mediante binatura.
Il doppino può essere singolo oppure in treccia di una
moltitudine di coppie, nel cavo ethernet usato
“normalmente” nelle reti a stella ci sono 4 coppie di
doppini
Cavo Coassiale
È composto da un conduttore rigido di rame posto al
centro del cavo (Anima) e da un dielettrico (generalmente
in Polietilene) che separa l'anima centrale da uno schermo
esterno costituito da fili metallici intrecciati (Calza) che
aiuta a bloccare le interferenze.
Fibra ottica
Le fibre ottiche permettono di convogliare e guidare
l’informazione sottoforma di impulsi luce laser, attraverso il
Prof. Giacomelli Filippo
2
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
fenomeno della riflessione totale tra core (anima) e
cladding (rivestimento).
Sono disponibili sotto forma di cavi, di materiale plastico,
sono flessibili, immuni ai disturbi elettrici ed alle condizioni
atmosferiche.
Le fibre ottiche non sono costose, ma sono molto costose
le strumentazioni e i dispositivi necessari per effettuare i
collegamenti con i dispositivi.
WI-FI
È un collegamento effettuato tramite particolari dispositivi,
l’informazione viene trasmessa attraverso delle onde
elettromagnetiche che si propagano nel vuoto
(collegamento radio); questo tipo di rete ha una copertura
di qualche decina di metri.
Onde Convogliate (power - line)
Rappresentano un particolare tipo di collegamento utilizzato
quando, a causa di forti interferenze e/o muri spessi, non è
possibile realizzare una rete wi-fi e non si vogliono aggiungere
ulteriori cavi.
L’informazione viene trasmessa sovrapponendola alla rete
elettrica di casa attraverso una coppia di dispositivi aggiuntiva.
I PROTOCOLLI
Per protocollo si intende l’insieme delle regole, che deve essere noto a tutti i dispositivi della stessa
rete, adottate affinché lo scambio di informazioni tra due o più dispositivi avvenga nel modo corretto.
Il protocollo deve essere uguale per tutti i dispositivi della stessa rete, ovvero devono essere uguali
sia l’ordine dei campi sia la loro lunghezza.
Gli indirizzi di un dispositivo in rete possono essere:
Indirizzo I.P.
Il router ha un I.P. fisso assegnato dal costruttore (due router dello stesso modello hanno lo stesso
I.P. ad esempio 192.168.0.0); l’I.P. di ogni dispositivo viene assegnato dal router, in ordine
progressivo ogni qualvolta sicollega un nuovo dispositivo alla rete;
Per configurare un router basta collegarlo ad un PC e digitare nella barra degli indirizzi del browser il
Prof. Giacomelli Filippo
3
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
suo I.P.ed usare come identificator (ID) e password (PW) quelli scritti nella sua parte inferiore ;
I Dispositivi collegati alla stessa rete NON possono avere lo stesso I.P.
I Dispositivi collegati a reti diverse possono avere lo stesso I.P.
Esistono 2 tipi di indirizzo I.P.:
·
·
IPv4 composto da 4 campi, separati da un punto, ognuno con numeri da 0 a 255;
IPv6 composto da 8 campi, ognuno con numeri da 0 a 65525 usato per le pgg internet.
Il dispositivo che effettua il collegamento ad internet si chiama Modem (spesso integrato con il router
in un unico dispositivo fisico il Modem – Router), l’indirizzo I.P. del collegamento ad internet è quindi
diverso dall’I.P. all’interno della rete e viene assegnato dall’ISP.
Indirizzo fisico o M.A.C.
È composto da 6 campi di due cifre esadecimali che identifica univocamente ogni scheda di rete
(unico per ogni dispositivo) ed è assegnato dl costruttore.
L’identificazione di un dispositivo in rete può essere, usando indirizzi I.P., aperta o protetta con
password; usando il M.A.C. l’identificazione del dispositivo avviene unicamente se nella
configurazione del router viene inserito l’indirizzo fisico del dispositivo da collegare.
Gli indirizzi I.P. del collegamento tra dispositivo e router e il M.A.C. possono essere conosciuti
digitando ipconfig /all nel prompt dei comandi; l’indirizzo I.P. del collegamento ad internet si può
ottenere attraverso qualunque servizio che misura la velocità del collegamento internet.
La velocità indicata alla voce banda del menù di configurazione della connessione Wi-Fi rappresenta
la velocità del collegamento tra PC e Router e non quella del collegamento ad internet.
Tipi di Nodi
Ogni dispositivo può essere classificato in base alla funzione che svolge nella rete, avremo quindi:
HOST
Indica un qualunque dispositivo collegato ad una rete, che questo sia router un PC, una stampante di
rete, uno scanner di rete, un elettrodomestico ecc ecc;
SERVER
Indica un dispositivo che fornisce (e che quindi prende il “comando” della comunicazione) un
qualunque tipo di servizio ad altri dispositivi chiamati client quando questi ultimi ne fanno richiesta;
(l’ISP è il server che fornisce i servizi internet);
Prof. Giacomelli Filippo
4
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
CLIENT
I ndica un qualunque dispositivo che accede ai servizi o alle risorse di un altro dispositivo detto
server.
N.B.: fornire o accedere ad un servizio non sono sinonimi di trasmettere o ricevere dati.
Client or stand alone applications?
Client installation (applicazione lato Server) means the database and the main application will be
present on a server, and a client is installed on the computer of each user who will access the
database on the server through a network; all clients are connected to the same database.
If you choose standalone installation (letteralmente applicazione che sta in piedi da sola,
Applicazione), this means the database and all the information is stored on the local computer and no
server is needed.
Valori logici e valori elettrici
Come sappiamo il linguaggio del computer è quello binario nella sua complessità (linguaggio
macchina) il valore di ogni bit, che può assumere valore 0 oppure 1 (detti anche valori logici) da un
punto di vista elettrico viene fatta un’associazione tra livello logico e livello elettrico (valore di
tensione) in genere si associa il valore logico 0 al valore di tensione più basso del circuito e il valore
logico 1 al valore di tensione più alto del circuito (tali valori di tensione dipendono dal tipo
generalmente dal tipo di dispositivo).
Il valore più basso di tensione vale normalmente 0 V (posizione 0 del deviatore);
il valore più
alto (posizione 1 del deviatore) di tensione vale: 12 V per i microprocessori perché assorbono molta
potenza; normalmente 5 V per gli altri circuiti di un PC; 3.3 V per i dispositivi portatili per diminuire la
potenza assorbita e aumentarne l’autonomia.
Prof. Giacomelli Filippo
5
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
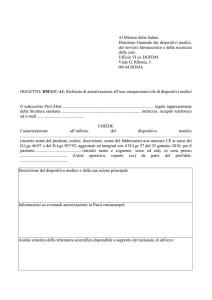
Tipi di Bus
I bus sono le vie di comunicazione dove si “muovono” le
informazioni, fisicamente sono di norma dei cavi o delle piste di rame
dove è presente una tensione elettrica, possono essere di due tipi:
Paralleli
Per ogni bit (che compone ad esempio un
numero) esiste un cavo o una pista di rame a
lui dedicata; (in figura ho la similitudine con
delle auto che circolano in una autostrada a
4 corsie disposte su più file parallele).
Ha il vantaggio che è costruttivamente più
semplice ma è anche il più rumoroso (un filo disteso funziona da antenna) e quindi comporta molti
errori di trasmissione quindi un rallentamento della comunicazione a causa delle ripetizioni.
Seriali
I bit che compongono un’informazione (ad esempio
un numero) “sono costretti” a muoversi, uno dopo
l’altro, su un unico cavo o pista di rame; (in figura
ho la similitudine con delle auto che sono costrette
a mettersi in fila per poter circolare).
Ha lo svantaggio di essere costruttivamente più complesso, è conveniente quando ho un elevato n°
di bit da trasmettere; è meno rumoroso e quindi comporta una velocità di trasmissione maggiore
(abbiamo già visto un bus di tipo seriale nella classificazione per topologia).
Il bus seriale più “conosciuto” è il bus USB (Universal Serial Bus) che è composto da 4 linee, le linee
esterne (con connettori più lunghi) sono quelle necessarie a portare l’alimentazione al dispositivo (se
è necessario) e vengono utilizzati per la funzione plug&play (riconoscimento del dispositivo che viene
collegato a sistema acceso), le linee interne sono quelle destinate alle informazioni, sono due per
ridurre la probabilità di commettere errori, su una linea o ho un dato sull’altro holo stesso dato ma
invertito (se su una linea ho uno 0 sull’altra ho un 1 e viceversa)).
Multiplexer e Demultiplexer
I dati che provengono da un bus parallelo, possono essere serializzati (cioè inviati uno dietro l’altro)
tramite un dispositivo che si chiama Multiplexer (MUX), questo dispositivo ha tanti ingressi tanti
quanti sono i bit in formato parallelo ed una sola uscita.
Il multiplexer è l’analogo del commutatore elettrico, la differenza sta nel fatto che nel commutatore la
manopola viene girata manualmente, nel multiplexer invece la selezione dell’ingresso che viene
inviata all’uscita viene selezionato tramite i comandi S0 e S1 anch’essi in formato binario (se ad
Prof. Giacomelli Filippo
6
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
esempio i selettori valgono S1 = 1 e S0 = 1 cioè (11)2 = (3)10 , verrà collegato direttamente con l’uscita
Out l’ingresso I3 . La trasmissione di più canali televisivi digitali può essere fatta in formato seriale.
I dati che provengono da un bus seriale, possono essere deserializzati (cioè reindirizzati verso piste
diverse) tramite un dispositivo che si chiama DeMultiplexer (DEMUX), questo dispositivo ha un solo
ingresso e tante uscite tante quante sono i bit in formato parallelo che voglio ottenere.
Il Demultiplexer è l’analogo del commutatore elettrico, la differenza sta nel fatto che nel commutatore
la manopola viene girata manualmente, nel multiplexer invece la selezione dell’ingresso che viene
inviata all’uscita viene selezionato tramite i comandi S0 e S1 anch’essi in formato binario (se ad
esempio i selettori valgono S1 = 0 e S0 = 1 cioè (01)2 = (1)10 , l’ingresso I verrà collegato direttamente
con l’uscita Out1 l’ingresso I3 . La trasmissione di un canale televisivo digitale demultiplexata
all’interno del decoder per poter scegliere il canale voluto.
Microprocessori VS Microcontrollori
Un microprocessore è un dispositivo costituito da uno circuito integrato
monolitico, ovvero è un dispositivo costituito da milioni di componenti
elementari miniaturizzati (ogni componente ha dimensioni dell’ordine del
micro o addirittura nanometro) racchiusi in un unico contenitore.
Un microprocessore, per come è fatto, è un dispositivo general porpouse
(scopo generico), cioè è adatto a svolgere diverse funzioni, anche
contemporaneamente, a seconda della applicazione eseguita.
All’interno di un PC abbiamo molti microprocessori (la CPU che esegue calcoli matematico-logici, il
chipset che controlla e gestisce il flusso delle informazioni, il motore grafico che trasforma le
informazione binarie in segnali che vengono visualizzati sul monitor).
La potenza di calcolo di un microprocessore indica il numero di “operazioni” e si misura in FLOPS =
numero di operazioni in virgola mobile (analogo della notazione scientifica in binario) al secondo;
questo valore per un microprocessore è dell’ordine delle centinaia di
MFLOPS o anche GFLOPS.
Un microcontrollore è anch’esso un circuito integrato monolitico ma effettua
un numero molto minore di FLOPS rispetto ad un microprocessore; però il
microcontrollore forma un sistema autonomo e racchiude al suo interno
Prof. Giacomelli Filippo
7
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
memorie (dati e di programma), timer, Mux e Demux, bus di comunicazione e circuiti per ricevere e
inviare dati da e verso l’esterno (microcomputer).
Il microcontrollore è un dispositivo per applicazioni embedded (o special porpouse), cioè è adatto ad
eseguire una specifica applicazione alla volta per un particolare uso; questa applicazione viene
allocata nella memoria di programma.
Questa applicazione (che prende anche il nome di Firmware) può essere
aggiornata o cambiata per fare eseguire al microcontrollore un’altra funzione;
un applicazione o un dispositivo embedded prendono il nome custom se
sono fatti su misura in seguito ad una richiesta specifica del cliente. I
dispositivi con microcontrollore ad alte prestazioni e flessibilità per uso civile
e per l’automazione industriale si chiamano PLC (Programmable Logic Controller)
PLC VS Cablaggi
Se ho un insieme di elementi il comportamento globale, per far svolgere un compito specifico,
dell’intero sistema dipenderà da come questi dispositivi sono cablati (cabled - collegati) tra di loro; se
voglio cambiare il comportamento globale del sistema dovrò cambiare il cablaggio (nel peggiore dei
casi, ad esempio una scheda madre, se sbaglio i collegamenti dovrò ricostruirla da capo).
Invece in un sistema a microcontrollore i dispositivi saranno collegati al PLC sempre nello stesso
modo, se voglio cambiare il comportamento globale del sistema (o se ho fatto un errore di
progettazione) basterà cambiare l’applicazione immagazzinata nel microcontrollore.
OnBoardDiagnostic
La diagnostica a bordo, dall'inglese on-board diagnostics, OBD o OBD-II, in un contesto
automobilistico, motociclistico o motoristico in generale, è un termine generico che si riferisce alla
capacità di autodiagnosi e segnalazione di errori/guasti di un veicolo.
OBD
I sistemi OBD forniscono al proprietario del veicolo o ad un meccanico accesso alle informazioni sullo
"stato di salute" dei vari sottosistemi del veicolo: la normativa standard (in Europa e Stati Uniti) è
riferita però solo ai sottosistemi "emission relevant", cioè quelli che, se rotti, possono portare ad un
aumento delle emissioni, come catalizzatore, sonda lambda ecc., mentre gli altri sistemi (es. airbag,
climatizzatore ecc.) hanno un'autodiagnosi non standard, definita a piacimento da ogni costruttore
automobilistico
OBD – II
L'OBD – II è uno standard definito negli Stati Uniti a metà degli anni novanta che permette di avere
un controllo completo sui parametri del motore e monitorare altre parti di un autoveicolo come il telaio
e gli accessori; inoltre permette di connettersi al sistema di diagnostica.
L'OBD - II è soprattutto un'interfaccia a sola lettura per acquisire segnali di diagnostica. Lo standard
OBD - II definisce inoltre alcuni comandi per il controllo dell'output, per le modalità di autocontrollo e
per l'azzeramento della memoria; Il connettore OBD-II è identico per tutti i modelli ma esistono cinque
differenti protocolli di comunicazione.
I costruttori di veicoli statunitensi hanno ricevuto l'obbligo di convertire le connessioni per la
diagnostica allo standard OBD-II nel 1996; fino al 1994 molte case utilizzavano delle connessioni
proprietarie; dove non c'è l'obbligo di legge per la rilevazione dei parametri legati all'inquinamento
Prof. Giacomelli Filippo
8
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
(es. per i motori benzina ante 2001), anziché di OBD-II si parla di OBD-I, cioè una diagnosi a bordo
relativa ai soli errori elettrici.
EOBD
La normativa EOBD (European On Board Diagnostics) è l'equivalente europeo dell'OBD-II ed è stata
introdotta per i motori a benzina nel 2001 assieme al livello di emissioni Euro 3 con la direttiva
98/69/CE[1].
Si applica a tutte le autovetture di categoria M1 (con non più di 8 posti a sedere e un peso lordo del
veicolo fino a 2.500 kg) immatricolate per la prima volta all'interno degli Stati membri dell'UE a partire
dal 1º gennaio 2001 per le autovetture con motore a benzina e dal 1º gennaio 2004 per le autovetture
con motore a gasolio. Per i modelli di nuova introduzione, le date di applicazione della normativa
sono state anticipate di un anno: 1º gennaio 2000 per le autovetture a benzina e 1º gennaio 2003 per
le autovetture a gasolio.
Per le autovetture con un peso lordo del veicolo superiore a 2500 kg e per i veicoli commerciali
leggeri, le date di applicazione della normativa sono partite dal 1º gennaio 2002 per i modelli a
benzina, e dal 1º gennaio 2007 per i modelli a gasolio.
L'attuazione tecnica dell'EOBD è essenzialmente la stessa dell'OBD-II, e vengono utilizzati gli stessi
protocolli di connessione e di segnale SAE J1962.
Le soglie di emissione EOBD per le normative Euro V e Euro VI sono inferiori rispetto alle precedenti
Euro III e IV.
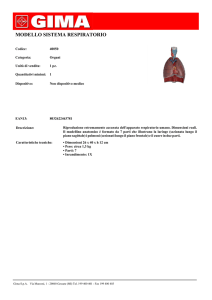
Manufacturer discretion:
· GM: J2411 GMLAN/SWC/Single-Wire CAN
1 · VW/Audi/BMW: Switched +12V to tell a scan tool
whether the ignition is on.
· Ford, FIAT: Infotainment CAN High
2
Bus Positive Line of SAE J1850 PWM and VPW
Manufacturer discretion:
· Ford: DCL(+) Argentina, Brazil (pre OBD-II) 1997-2000,
3
USA, Europe, etc.
· Ford: Medium Speed CAN-High
· Chrysler: CCD Bus(+)
9
Manufacturer discretion:
· BMW: TD (Tachometer Display) signal aka
engine RPM signal.
· GM: 8192 bit/s ALDL where fitted.
· Ford: Infotainment CAN-Low
10
Bus Negative Line of SAE J1850 PWM only (not
SAE J1850 VPW)
Manufacturer Discretion:
· Ford: DCL(-) Argentina, Brazil (pre OBD-II)
11
1997-2000, USA, Europe, etc.
[
· Ford: Medium Speed CAN-Low
· Chrysler: CCD Bus(-)
Chassis ground
4
5
Signal ground
12
Manufacturer discretion:
· GM: Diagnostic codes to DIC (1994-2004
Corvette)
13
Manufacturer discretion:
· Ford: FEPS – Programming PCM voltage
6 CAN-High (ISO 15765-4 and SAE J2284)
14 CAN-Low (ISO 15765-4 and SAE J2284)
7 K-Line of ISO 9141-2 and ISO 14230-4
15 L-Line of ISO 9141-2 and ISO 14230-4
Manufacturer discretion:
· BMW: Second K-Line for non OBD-II
8
(Body/Chassis/Infotainment) systems.
· FIAT: Infotainment CAN-Low.
Battery voltage:
· Type "A" 12V/4A
16
· Type "B" 24V/2A
Prof. Giacomelli Filippo
9
Tecnologie dell’informazione e della comunicazione
I.P. “G. Marconi”
A.S.2016/2017
RETIINFORMATICHE...............................................................................................................................................1
Classificazione .................................................................................................................................................................................. 1
1 - Per estensione......................................................................................................................................................................... 1
LAN ......................................................................................................................................................................................... 1
MAN ........................................................................................................................................................................................ 1
WAN ........................................................................................................................................................................................ 1
BGAN....................................................................................................................................................................................... 1
2 - Per topologia ........................................................................................................................................................................... 1
Bus .......................................................................................................................................................................................... 1
Stella ....................................................................................................................................................................................... 2
Anello (Token Ring) .................................................................................................................................................................. 2
3 - Per mezzo trasmissivo ............................................................................................................................................................. 2
Doppino incrociato .................................................................................................................................................................. 2
Cavo Coassiale ......................................................................................................................................................................... 2
Fibra ottica .............................................................................................................................................................................. 2
WI-FI........................................................................................................................................................................................ 3
Onde Convogliate (power - line)............................................................................................................................................... 3
I PROTOCOLLI ................................................................................................................................................................................... 3
Indirizzo I.P................................................................................................................................................................................... 3
Indirizzo fisico o M.A.C. ................................................................................................................................................................ 4
Tipi di Nodi ....................................................................................................................................................................................... 4
HOST ............................................................................................................................................................................................ 4
SERVER......................................................................................................................................................................................... 4
CLIENT ......................................................................................................................................................................................... 5
Client or stand alone applications?................................................................................................................................................... 5
Valori logici e valori elettrici ............................................................................................................................................................. 5
Tipi di Bus......................................................................................................................................................................................... 6
Paralleli ........................................................................................................................................................................................ 6
Seriali ........................................................................................................................................................................................... 6
Multiplexer e Demultiplexer ............................................................................................................................................................ 6
Microprocessori VS Microcontrollori ................................................................................................................................................ 7
PLC VS Cablaggi ................................................................................................................................................................................ 8
OnBoardDiagnostic .......................................................................................................................................................................... 8
OBD ............................................................................................................................................................................................. 8
OBD – II ........................................................................................................................................................................................ 8
EOBD............................................................................................................................................................................................ 9
Prof. Giacomelli Filippo
10
Tecnologie dell’informazione e della comunicazione