SINAMICS S120
SINAMICS S120 Tecnica di azionamento Motori Torque integrati 1FW6
Motori Torque integrati 1FW6
Manuale di progettazione · 05/2009
SINAMICS
s
Premessa
SINAMICS S120
Tecnica di azionamento
Motori Torque integrati 1FW6
Avvertenze di sicurezza
generali
1
Descrizione del motore
2
Componenti del motore
integrato e opzioni
3
Motori accoppiati
4
Progettazione del motore
5
Montaggio del motore
6
Integrazione nel sistema
7
Interfacce
8
Messa in servizio
9
Manuale di progettazione
05/2009
6SN1197-0AE00-0CP3
Funzionamento
10
Manutenzione e riparazione
11
Immagazzinaggio e trasporto
12
Compatibilità ambientale
13
Dati tecnici e curve
caratteristiche
14
Schemi di installazione /
disegni quotati
15
Appendice
A
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
con il triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
lesioni fisiche non gravi.
CAUTELA
senza triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
danni materiali.
ATTENZIONE
indica che, se non vengono rispettate le relative misure di sicurezza, possono subentrare condizioni o
conseguenze indesiderate.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il
rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze
di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed
esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili
pericoli.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
N. di ordinazione documentazione: 6SN1197-0AE00-0CP3
Ⓟ 05/2009
Copyright © Siemens AG 2009.
Con riserva di eventuali modifiche tecniche
Premessa
Informazioni sulla documentazione
All'indirizzo Internet http://www.siemens.com/motioncontrol/docu sono riportate informazioni
sui seguenti argomenti:
● Ordinazione della documentazione
In questa sezione si trova una panoramica aggiornata delle pubblicazioni.
● Download della documentazione
Altri link per il download di file dal Service & Support.
● Ricerca online della documentazione
Informazioni su DOConCD e accesso diretto alle pubblicazioni in DOConWeb.
● Strutturare individualmente la documentazione sulla base dei contenuti Siemens con My
Documentation Manager (MDM), vedere http://www.siemens.com/mdm
My Documentation Manager dispone di una serie di funzioni che consentono di creare la
propria documentazione relativa alla macchina.
● Formazione e FAQ
Per informazioni sull'offerta di corsi di formazione e sulle FAQ (Frequently Asked
Questions), selezionare il relativo link indicato nella colonna laterale.
Destinatari
Il presente manuale è destinato ai pianificatori, progettisti e costruttori, nonché agli elettricisti
e al personale addetto al montaggio e all'assistenza tecnica.
Vantaggi
Il manuale di progettazione consente ai destinatari di applicare le regole e le direttive che
vanno rispettate durante la progettazione dei motori Torque, fornendo inoltre un supporto per
la scelta dei prodotti e delle funzioni.
Fornitura standard
Nella presente documentazione viene descritta la funzionalità della configurazione standard.
Eventuali integrazioni o le modifiche apportate dal costruttore della macchina vengono
documentate dallo stesso.
Il sistema di azionamento può contenere altre funzioni oltre a quelle descritte in questo
manuale. Ciò non costituisce però obbligo di implementazione di tali funzioni in caso di
nuove forniture o di assistenza tecnica.
Inoltre, per motivi di chiarezza, questa documentazione non riporta tutte le informazioni
dettagliate relative alle varie esecuzioni del prodotto e non può nemmeno prendere in
considerazione e trattare ogni possibile caso di montaggio, funzionamento e manutenzione.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
5
Premessa
Supporto tecnico
Per chiarimenti tecnici rivolgersi alla seguente hotline:
Europa/Africa
Telefono
+49 180 5050 222
Fax
+49 180 5050 223
0,14 €/min. dalla rete fissa tedesca, per la telefonia mobile il costo può variare
Internet
http://www.siemens.com/automation/support-request
America
Telefono
+1 423 262 2522
Fax
+1 423 262 2200
E-mail
mailto:[email protected]
Telefono
+86 1064 757 575
Fax
+86 1064 747 474
E-mail
mailto:[email protected]
Asia/Pacifico
Nota
Per i numeri telefonici dell'assistenza tecnica specifica dei vari paesi, vedere in Internet:
http://www.automation.siemens.com/partner
Domande sulla documentazione
Per domande relative alla documentazione tecnica (ad es. suggerimenti, correzioni) si prega
di inviare un fax o una e-mail al seguente indirizzo:
Fax
+49 (0) 9131 / 98-2176
E-mail
mailto: [email protected]
In appendice al presente documento è disponibile un modello fax.
Indirizzo Internet per i prodotti
http://www.siemens.com/motioncontrol
6
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Premessa
Dichiarazione di conformità CE
La Dichiarazione di conformità CE in riferimento alla direttiva sulla bassa tensione
2006/95/CE si può consultare in Internet facendo clic sul seguente link nella cartella
"Tecnica di azionamento":
http://support.automation.siemens.com/WW/llisapi.dll?func=cslib.csinfo&lang=de&siteid=csiu
s&objid=19183574
Se non si dispone di un accesso a Internet, rivolgersi alla filiale Siemens competente per
ottenere una copia della Dichiarazione di conformità CE.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
7
Indice del contenuto
Premessa .................................................................................................................................................. 5
1
2
3
4
Avvertenze di sicurezza generali ............................................................................................................. 13
1.1
Osservanza e rispetto delle avvertenze di sicurezza ..................................................................14
1.2
Uso degli azionamenti diretti e dei componenti ...........................................................................15
1.3
Uso conforme alle disposizioni ....................................................................................................16
1.4
Pericoli dovuti a forti campi magnetici .........................................................................................17
1.5
Pericolo di folgorazione................................................................................................................20
1.6
Applicazione di targhette di segnalazione di pericolo..................................................................20
1.7
Pittogrammi forniti per 1FW6 .......................................................................................................21
Descrizione del motore ............................................................................................................................ 23
2.1
2.1.1
2.1.2
2.1.3
Proprietà.......................................................................................................................................23
Informazioni generali....................................................................................................................23
Vantaggi .......................................................................................................................................24
Campo di applicazione.................................................................................................................25
2.2
Caratteristiche tecniche ...............................................................................................................25
2.3
Dati per la scelta e l'ordinazione ..................................................................................................29
2.4
2.4.1
2.4.2
2.4.3
2.4.4
2.4.5
2.4.6
2.4.7
2.4.8
2.4.9
Codice di ordinazione ..................................................................................................................34
Composizione dei codici di ordinazione.......................................................................................34
Motore Torque integrato standard 1FW6.....................................................................................35
Statore come componente singolo ..............................................................................................36
Rotore come componente singolo ...............................................................................................37
O-ring ...........................................................................................................................................37
Adattatore di allacciamento per refrigerante................................................................................38
Connettore a spina.......................................................................................................................38
Indicazioni per l'ordinazione.........................................................................................................38
Esempi di ordinazione..................................................................................................................39
2.5
Targhetta dati motore...................................................................................................................40
Componenti del motore integrato e opzioni ............................................................................................. 41
3.1
Panoramica della struttura del motore.........................................................................................41
3.2
3.2.1
3.2.2
Protezione termica del motore .....................................................................................................44
Descrizione dei sensori di temperatura .......................................................................................44
Valutazione dei sensori di temperatura per la protezione del motore .........................................48
3.3
3.3.1
3.3.2
Raffreddamento ...........................................................................................................................48
Circuiti di raffreddamento.............................................................................................................50
Liquidi di raffreddamento .............................................................................................................52
Motori accoppiati...................................................................................................................................... 55
4.1
4.1.1
Funzionamento in parallelo di più motori .....................................................................................55
Collegamento della potenza nel funzionamento in parallelo .......................................................56
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9
Indice del contenuto
4.1.2
5
6
7
8
9
10
10
Disposizione bifronte................................................................................................................... 59
Progettazione del motore......................................................................................................................... 61
5.1
5.1.1
5.1.2
5.1.3
5.1.4
5.1.5
5.1.6
5.1.7
5.1.8
5.1.9
5.1.10
5.1.11
Procedura.................................................................................................................................... 61
Condizioni marginali meccaniche ............................................................................................... 63
Impostazione del ciclo di carico .................................................................................................. 63
Diagramma coppia/tempo ........................................................................................................... 64
Scelta dei motori ......................................................................................................................... 66
Carico di corrente non uniforme.................................................................................................. 67
Diagramma coppia motore / numero di giri................................................................................. 67
Requisiti relativi alla coppia e al numero di giri ........................................................................... 68
Più motori Torque su un asse ..................................................................................................... 69
Controllo dei momenti di inerzia.................................................................................................. 69
Scelta dei componenti del sistema di azionamento per il collegamento di potenza................... 70
Calcolo della potenza di alimentazione necessaria .................................................................... 70
5.2
Esempio(i) ................................................................................................................................... 71
5.3
Servizio di breve durata S2 e servizio intermittente S3 .............................................................. 76
Montaggio del motore .............................................................................................................................. 79
6.1
6.1.1
6.1.2
6.1.3
6.1.4
6.1.5
Montaggio del motore ................................................................................................................. 79
Procedura di montaggio del motore............................................................................................ 84
Collegamento del radiatore ......................................................................................................... 88
Avvertenze relative alla posa dei cavi......................................................................................... 90
Verifica dei lavori......................................................................................................................... 91
Esempi di montaggio................................................................................................................... 92
6.2
Protezione dei componenti del motore ..................................................................................... 100
Integrazione nel sistema ........................................................................................................................ 101
7.1
Requisiti di sistema ................................................................................................................... 101
7.2
Encoder ..................................................................................................................................... 106
7.3
Cuscinetto ................................................................................................................................. 109
7.4
Concetti di frenatura.................................................................................................................. 109
Interfacce............................................................................................................................................... 113
8.1
Panoramica ............................................................................................................................... 113
8.2
8.2.1
8.2.2
8.2.3
8.2.4
Collegamenti elettrici................................................................................................................. 142
Attacco di potenza..................................................................................................................... 143
Collegamento del segnale......................................................................................................... 144
Schermatura, messa a terra ed equipotenzialità ...................................................................... 145
Requisiti dei cavi di alimentazione del motore .......................................................................... 146
8.3
Collegamento del radiatore ....................................................................................................... 147
Messa in servizio ................................................................................................................................... 159
9.1
Avvertenze di sicurezza relative alla messa in servizio ............................................................ 159
9.2
Procedura.................................................................................................................................. 162
Funzionamento ...................................................................................................................................... 165
10.1
Avvertenze di sicurezza per il funzionamento........................................................................... 165
10.2
Gestione delle anomalie............................................................................................................ 165
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Indice del contenuto
11
12
13
14
15
A
Manutenzione e riparazione................................................................................................................... 167
11.1
Avvertenze di sicurezza relative alla manutenzione e alla riparazione .....................................167
11.2
Avvertenze di sicurezza relative alla prova ad alta tensione .....................................................169
11.3
Interventi di manutenzione.........................................................................................................169
11.4
Cicli di prova e di sostituzione del liquido di raffreddamento.....................................................170
Immagazzinaggio e trasporto................................................................................................................. 171
12.1
Avvertenze per l'imballaggio, l'immagazzinaggio e il trasporto .................................................171
12.2
Avvertenza di sicurezza per i dispositivi di sollevamento ..........................................................172
Compatibilità ambientale ....................................................................................................................... 173
13.1
Compatibilità ambientale nella produzione ................................................................................173
13.2
13.2.1
13.2.2
13.2.3
Smaltimento ...............................................................................................................................173
Avvertenze relative allo smaltimento .........................................................................................173
Smaltimento di rotori 1FW6 .......................................................................................................174
Smaltimento dell'imballaggio .....................................................................................................174
Dati tecnici e curve caratteristiche ......................................................................................................... 175
14.1
Spiegazioni dei simboli della formula.........................................................................................175
14.2
14.2.1
14.2.2
14.2.3
14.2.4
14.2.5
14.2.6
14.2.7
Fogli dati e diagrammi................................................................................................................182
1FW6090-xxxxx-xxxx.................................................................................................................182
1FW6130-xxxxx-xxxx.................................................................................................................190
1FW6150-xxxxx-xxxx.................................................................................................................198
1FW6160-xxxxx-xxxx.................................................................................................................206
1FW6190-xxxxx-xxxx.................................................................................................................227
1FW6230-xxxxx-xxxx.................................................................................................................248
1FW6290-xxxxx-xxxx.................................................................................................................268
Schemi di installazione / disegni quotati ................................................................................................ 279
15.1
Caso di installazione di motori con camicia di raffreddamento..................................................279
15.2
Spiegazione degli schemi di installazione .................................................................................280
15.3
Schemi di installazione / disegni quotati ....................................................................................282
Appendice.............................................................................................................................................. 291
A.1
A.1.1
A.1.2
A.1.3
A.1.4
Raccomandazioni del costruttore...............................................................................................291
Fornitori di raccorderie e accessori per sistemi di raffreddamento............................................291
Fornitori di gruppi di raffreddamento..........................................................................................292
Fornitori di prodotti anticorrosivi.................................................................................................293
Fornitori di elementi di frenatura ................................................................................................294
A.2
Modulo fax per proposte/correzioni (modello da copiare) .........................................................295
A.3
Lista delle abbreviazioni.............................................................................................................296
Indice analitico....................................................................................................................................... 299
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
11
Avvertenze di sicurezza generali
1
Osservare tutte le avvertenze di sicurezza per evitare danni a persone e cose. È necessario
prestare particolare attenzione alla avvertenze di sicurezza e alle altre informazioni
riguardanti i magneti permanenti ad alta intensità di campo, integrati nel rotore del motore
Torque.
Il rotore viene trattenuto nello statore tramite i blocchi di sicurezza per il trasporto e la lamina
distanziale. Per il magazzinaggio e il trasporto sono necessari, e vanno pertanto conservati,
l'imballaggio originale del motore Torque integrato e i blocchi di sicurezza comprese le
relative viti. Conservare anche questa documentazione e, all'occorrenza, metterla a
disposizione del personale incaricato.
Rischi residui di Power Drive System
Nell'ambito della valutazione dei rischi della macchina, da eseguire conformemente alla
direttiva macchine CE, il costruttore della macchina deve considerare i seguenti rischi residui
derivanti dai componenti per il controllo e l'azionamento di un Power Drive System (PDS).
1. Movimenti indesiderati di parti della macchina motorizzate durante la messa in servizio, il
funzionamento, la manutenzione e la riparazione, dovuti ad esempio a
– Errori hardware e/o software nei sensori, nel controllo, negli attuatori e nella tecnica di
collegamento
– Tempi di reazione del controllo e dell'azionamento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Errori durante la parametrizzazione, la programmazione, il cablaggio e il montaggio
– Utilizzo di apparecchiature radio / telefoni cellulari nelle immediate vicinanze del
controllo
– Influenze esterne / danneggiamenti.
2. Temp. eccezionali nonché emissioni di luce, rumori, particelle e gas, dovuti ad esempio a
– Guasto a componenti
– Errore software
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Influenze esterne / danneggiamenti.
3. Tensioni di contatto pericolose, ad esempio dovute a
– Guasto a componenti
– Influenza in caso di cariche elettrostatiche
– Induzione di tensioni con motori in movimento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Condensa / imbrattamenti conduttivi
– Influenze esterne / danneggiamenti
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
13
Avvertenze di sicurezza generali
1.1 Osservanza e rispetto delle avvertenze di sicurezza
4. Campi elettrici, magnetici ed elettromagnetici in condizioni di esercizio che ad es.
possono essere pericolosi per portatori di pacemaker, impianti od oggetti metallici in caso
di distanza insufficiente.
5. Rilascio di sostanze ed emissioni dannose per l'ambiente in caso di utilizzo non
appropriato e/o smaltimento non corretto dei componenti.
Per ulteriori informazioni sui rischi residui derivanti dai componenti del PDS, consultare la
Documentazione tecnica per l'utente ai capitoli relativi.
PERICOLO
I campi elettrici, magnetici ed elettromagnetici che si manifestano in condizioni di esercizio
nelle immediate vicinanze del prodotto possono essere pericolosi per portatori di
pacemaker, impianti o simili.
Gli addetti alla macchina o all'impianto e le persone che vengono a trovarsi in prossimità
del prodotto devono rispettare le norme e le direttive pertinenti! Nello spazio economico
europeo si tratta in particolare della direttiva CEM 2004/40/CE, norme EN 12198-1 ...
12198-3, mentre nella Repubblica Federale Tedesca vigono le norme antinfortunistiche
dell'associazione professionale BGV 11 con il relativo regolamento BGR 11 "Campi
elettromagnetici".
Inoltre si deve effettuare un'analisi dei rischi di ogni posto di lavoro, stilare e applicare le
misure cautelari per ridurre i pericoli e i rischi per le persone, nonché definire e rispettare le
aree a rischio di esplosione e quelle pericolose.
1.1
Osservanza e rispetto delle avvertenze di sicurezza
PERICOLO
La mancata osservanza di queste avvertenze di sicurezza può provocare la morte, gravi
lesioni alle persone o danni materiali.
Osservare assolutamente le avvertenze di sicurezza di questa documentazione, incluse le
avvertenze di sicurezza speciali dei singoli capitoli.
Rispettare tutti i segnali di pericolo e di avvertenza.
Assicurarsi che il prodotto finale rispetti tutte le norme pertinenti e le disposizioni di legge.
Vanno inoltre osservati i requisiti e le norme di sicurezza nazionali, locali e dell'impianto.
Per l'esecuzione di varianti speciali dei motori valgono, oltre alle avvertenze di sicurezza di
questa documentazione, anche le indicazioni riportate nei cataloghi e nelle offerte.
Se si effettuano operazioni sul sistema di azionamento, rispettare il relativo manuale
operativo.
14
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Avvertenze di sicurezza generali
1.2 Uso degli azionamenti diretti e dei componenti
1.2
Uso degli azionamenti diretti e dei componenti
PERICOLO
Se un personale non addestrato interviene sugli azionamenti diretti e/o sui loro componenti,
sussiste il pericolo di morte, danni a persone e/o a cose.
L'uso degli azionamenti diretti e dei loro componenti è consentito solo al personale che
conosce e rispetta le relative avvertenze di sicurezza.
Il montaggio, la messa in servizio, il funzionamento e la manutenzione devono essere
affidati solo a personale qualificato, addestrato e istruito. Tale personale deve conoscere a
fondo queste istruzioni.
Tutti gli interventi sul motore devono essere eseguiti da almeno due persone.
Nota
Verificare che le informazioni sulle fonti di pericolo e le misure di sicurezza siano sempre
disponibili. Conservare a questo scopo tutte le descrizioni e le avvertenze di sicurezza degli
azionamenti diretti e dei loro componenti.
Tutte le descrizioni e le avvertenze di sicurezza possono essere richieste anche tramite la
filiale Siemens di competenza.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
15
Avvertenze di sicurezza generali
1.3 Uso conforme alle disposizioni
1.3
Uso conforme alle disposizioni
PERICOLO
Se gli azionamenti diretti o i loro componenti non vengono utilizzati conformemente alle
disposizioni, sussiste il pericolo di morte, danni a persone e/o a cose.
I motori sono destinati ad impianti per la piccola e media industria. L'utilizzo in aree a
rischio di esplosione non è consentito, se non espressamente previsto (tenere conto delle
eventuali avvertenze supplementari allegate). Se per un caso particolare, come l'impiego in
impianti non industriali, vengono posti requisiti maggiori (ad es. riguardo alla protezione
contro i contatti diretti), queste condizioni vanno assicurate sul lato impianto al momento
dell'installazione.
Gli azionamenti diretti e i loro componenti possono essere utilizzati solo per gli impieghi
indicati dal costruttore. La filiale Siemens di competenza è a disposizione per eventuali
chiarimenti a questo proposito.
I motori devono essere protetti dalla sporcizia e dal contatto con sostanze aggressive.
Le esecuzioni speciali e le varianti costruttive, che si scostano nei dettagli tecnici dai motori
qui descritti, devono essere discusse con la filiale Siemens di competenza.
I motori sono dimensionati per temperature ambiente da -5°C a +40°C. Fare attenzione a
eventuali indicazioni diverse sulla targhetta dei dati tecnici. Le condizioni esistenti nel luogo
d'impiego devono corrispondere a tutti i dati della targhetta e alle specifiche delle condizioni
riportate in questa documentazione. Le differenze relative ad approvazioni o normative
nazionali devono all'occorrenza essere fatte oggetto di una considerazione separata.
PERICOLO
I prodotti forniti sono previsti esclusivamente per il montaggio in una macchina. La messa
in servizio non è consentita finché non è stata verificata la conformità del prodotto finale
con la direttiva 98/37/CE. Rispettare tutte le avvertenze di sicurezza e renderle note
all'utente finale.
PERICOLO
Rischio di folgorazione in presenza di una tensione pericolosa sulla statore come
componente singolo!
Per assicurare la protezione contro i contatti diretti dei componenti, è ammesso applicare
tensione ai motori solo se gli stessi sono assemblati.
16
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Avvertenze di sicurezza generali
1.4 Pericoli dovuti a forti campi magnetici
1.4
Pericoli dovuti a forti campi magnetici
Comparsa di campi magnetici
Nei componenti del motore che contengono magneti permanenti si verificano forti campi
magnetici. Dall'intensità di campo magnetica dei motori risulta assenza di corrente
esclusivamente dai campi magnetici dei componenti con magneti permanenti. Durante il
funzionamento si manifestano anche campi elettromagnetici.
Componenti con magneti permanenti
CAUTELA
I magneti permanenti dei motori Torque 1FW6 si trovano nel rotore.
'HQVLW¢GLIOXVVRPDJQHWLFDLQP7
FLUFDb
FLUFDb
'LVWDQ]DLQPP
Figura 1-1
Rappresentazione schematica del campo magnetico statico di un rotore in funzione della
distanza
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
17
Avvertenze di sicurezza generali
1.4 Pericoli dovuti a forti campi magnetici
Pericoli dovuti a forti campi magnetici
PERICOLO
I campi magnetici elevati influiscono sulle persone e possono provocare danni.
Riguardo all'effetto dei campi magnetici elevati sulle persone, nella Repubblica Federale di
Germania va osservata la norma BGV B 11 "Elektromagnetische Felder" (Campi
elettromagnetici). Essa pone dei requisiti da rispettare sui posti di lavoro. In altri Paesi
vanno rispettate le relative norme e i requisiti nazionali e locali.
L'uso diretto di componenti che contengono magneti permanenti è tassativamente
sconsigliato alle persone con protesi attive (ad es. pacemaker, pompa insulinica), protesi
metalliche e corpi estranei magneticamente o elettricamente conduttivi. Ciò si applica, ad
esempio, alle operazioni di montaggio, manutenzione o immagazzinaggio.
La norma BGV B 11 prescrive per i campi magnetici statici un valore limite di 212 mT.
Questo valore viene rispettato per distanze maggiori di 20 mm da un rotore.
Inoltre occorre considerare i requisiti della norma BGV B 11 in rapporto ai campi magnetici
elevati (BGV B11 §14).
PERICOLO
Le persone professionalmente esposte devono rispettare una distanza di almeno 50 mm da
un rotore.
I portatori di pacemaker devono osservare una distanza di almeno 500 mm da un rotore.
Gli esseri umani non sono n grado di avvertire la presenza di un forte campo magnetico e in
genere non ne hanno esperienza. Perciò le forze magnetiche di attrazione prodotte dai forti
campi magnetici vengono spesso sottovalutate.
Nelle vicinanze dei componenti del motore che contengono magneti permanenti (distanza
inferiore a 100 mm) le forze di attrazione magnetiche presentano aumenti molto elevati e
possono raggiungere valori di parecchi kN. – Esempio: Le forze di attrazione agiscono come
una massa di svariate centinaia di chili, capace di schiacciare una parte del corpo!
18
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Avvertenze di sicurezza generali
1.4 Pericoli dovuti a forti campi magnetici
PERICOLO
Le forze di attrazione elevate su materiali magnetizzabili costituiscono, quando si lavora in
prossimità di componenti con magneti permanenti (distanza inferiore a 100 mm), un
elevato pericolo di schiacciamento.
Non sottovalutare gli effetti delle forze di attrazione!
In prossimità del motore o di un componente con magneti permanenti, non portare sulla
persona oggetti di materiali magnetizzabili (ad es. orologi, attrezzi di acciaio o ferro) e/o
magneti permanenti.
Per incidenti che si verificassero lavorando con i magneti permanenti è assolutamente
necessario, per poter liberare le parti del corpo coinvolte (mano, dito, piede, ecc.), tenere a
disposizione:
un martello (circa 3 kg) di materiale solido e non magnetizzabile
due punte (angolo del tagliente di circa 10° - 15°) di materiale solido e non
magnetizzabile (ad es. legno duro)
Pronto intervento in caso di infortuni con i magneti permanenti
● Mantenere la calma!
● Premere l'interruttore di arresto di emergenza e disinserire all'occorrenza l'interruttore
principale se la macchina è sotto tensione.
● Prestare il pronto soccorso. Se necessario, richiedere un soccorso esterno.
● Per liberare le parti del corpo imprigionate (mano, dito, piede ...) separare i pezzi che la
forza di attrazione ha fatto aderire:
– Inserire dei cunei con il martello nella fessura di separazione.
– Liberare le parti del corpo imprigionate.
● Se necessario, richiedere l'intervento di un MEDICO.
CAUTELA
I campi magnetici possono provocare la perdita di dati nei supporti magnetici o elettronici e
danneggiare gli orologi.
Prima di avvicinarsi al rotore (<100 mm) verificare di non portare con sé supporti magnetici
(ad es. carte di credito, dischetti, ecc.) e orologi.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
19
Avvertenze di sicurezza generali
1.5 Pericolo di folgorazione
1.5
Pericolo di folgorazione
PERICOLO
Pericolo di folgorazione! La rotazione di un motore Torque montato provoca, in
corrispondenza dei terminali dei cavi del motore stesso, tensioni dovute ad induzione che
possono costituire un pericolo mortale.
Isolare i morsetti e i conduttori dei terminali dei cavi scoperti o evitare di far girare i motori
Torque già montati.
Inoltre sussiste il pericolo di schiacciamento.
PERICOLO
Pericolo di correnti di dispersione elevate
Con correnti di dispersione elevate possono rendersi necessari requisiti maggiori per il
conduttore di protezione e simboli di avvertenza per il PDS (Prower Drive System).
Indicazioni dettagliate su questo punto sono contenute nella norma EN 61800-5-1.
Misure di protezione contro le tensioni residue
PERICOLO
Le tensioni residue sulle connessioni del motore costituiscono un pericolo di scossa
elettrica.
Le parti attive del motore possono presentare, alla disinserzione dell'alimentazione, una
carica di oltre 60 μC. Inoltre può sussistere sulle estremità disimpegnate del cavo, ad es.
quando si stacca il connettore, una tensione di oltre 60 V anche 1 s dopo la disinserzione.
È perciò necessario assumere misure per la protezione dalle tensioni residue.
1.6
Applicazione di targhette di segnalazione di pericolo
Tutte le zone soggette a pericolo vanno contrassegnate nelle immediate vicinanze da
segnali di pericolo e divieto (pittogrammi) ben visibili. I relativi testi devono essere redatti
nella lingua del Paese in cui si trova l'impianto.
20
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Avvertenze di sicurezza generali
1.7 Pittogrammi forniti per 1FW6
1.7
Pittogrammi forniti per 1FW6
Per segnalare i pericoli, la fornitura include le seguenti etichette adesive a lunga durata:
Tabella 1- 1
Segnali di pericolo forniti a norma BGV A8 e DIN 4844-2 e loro significato
Targhetta
Tabella 1- 2
Significato
Targhetta
Significato
Pericolo di campo
magnetico
Pericolo di lesioni alle
mani
(D-W013)
(D-W027)
Pericolo di tensione
elettrica rischiosa
Pericolo di superficie
calda
(D-W008)
(D-W026)
Segnali di divieto forniti a norma BGV A8 e DIN 4844-2 e loro significato
Targhetta
Significato
Targhetta
Significato
Divieto per portatori di
pacemaker
Divieto per portatori di
protesi metalliche
(D-P011)
(D-P016)
Divieto di indossare
oggetti metallici od
orologi
Divieto di portare su di
sé supporti magnetici o
elettronici
(D-P020)
(D-P021)
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
21
Descrizione del motore
2
Motore Torque integrato 1FW6
2.1
Proprietà
2.1.1
Informazioni generali
I motori Torque della serie 1FW6 sono concepiti come motori integrati per l'impiego in
azionamenti diretti a funzionamento lento con forte erogazione di coppia.
I motori Torque integrati sono motori sincroni multipolari in corrente trifase a magneti
permanenti, raffreddati a liquido, con il rotore ad albero cavo. I motori sono forniti come
componenti integrati; al momento della fornitura vengono assicurati tramite blocchi di
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
23
Descrizione del motore
2.1 Proprietà
sicurezza per il trasporto e una lamina distanziale. Per realizzare un'unità di azionamento
completa sono anche necessari un cuscinetto e un encoder rotativo.
La gamma comprende 7 grandezze costruttive (o diametri esterni), ciascuna in almeno 4
lunghezze assi. Ogni motore è disponibile per almeno due diversi intervalli di numeri di giri
Per l'installazione nella struttura costruttiva della macchina, lo statore e il rotore sono
flangiati da entrambi i lati con superfici di centraggio e fori filettati.
Norme e prescrizioni
Il prodotto soddisfa le norme specificate nella Dichiarazione di conformità CE in relazione
alla direttiva sulla bassa tensione.
2.1.2
Vantaggi
I motori sono contraddistinti da:
● un'elevata potenza specifica
● un'elevata coppia con una forma costruttiva compatta e con un minimo volume costruttivo
● un'ampia gamma di modelli
● un'elevata sovraccaricabilità (fattore 1,6 ... 2,2); l'assorbimento di corrente degli
avvolgimenti è adeguato ai Motor Module del sistema di azionamento SINAMICS S120
● momento d'inerzia minimo
● un'elevata affidabilità, poiché vengono a mancare nella catena cinematica componenti a
ingranaggi soggetti ad usura meccanica
● un raffreddamento ad acqua per aumentare la potenza nominale
● un collegamento diretto alla macchina per mezzo di una connessione flangiata
● un'uscita cavi assiale, radiale verso l'esterno o tangenziale per tutte le grandezze
costruttive
Grazie al raffreddamento ad acqua, soddisfano requisiti elevati in termini di comportamento
termico internamente alla struttura della macchina.
24
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.2 Caratteristiche tecniche
2.1.3
Campo di applicazione
In abbinamento con il sistema di azionamento SINAMICS S120 (formato Booksize o
Blocksize), i motori Torque possono essere impiegati come azionamenti diretti per le
seguenti applicazioni macchina:
● trasferte a tavola rotante, tavole rotanti, assi orientabili
● assi rotanti (assi A, B, C per macchine operatrici a 5 assi)
● tavole rotanti, trasferte a tavola rotante, macchine a dividere
● azionamento di revolver e tamburi per macchine mono e multimandrino
● magazzini utensili dinamici
● mandrini per fresatrici
● azionamenti rulli e cilindri
● assi di avanzamento e di movimentazione
AVVERTENZA
I motori non sono adatti per il collegamento diretto alla rete, bensì per l'abbinamento a un
sistema di azionamento appropriato.
Nota
Si tenga presente che per l'impiego dei motori diretti (motori Torque) 1FW6 in teste a forcella
di macchine utensili o di robot potrebbe essere necessario acquistare una licenza US Patent
US5584621 e le relative royalties valide a livello mondiale.
2.2
Caratteristiche tecniche
Nota
I valori citati nelle tabella seguenti valgono solo quando sono soddisfatti i requisiti di sistema
descritti nel capitolo "Integrazione nel sistema" .
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
25
Descrizione del motore
2.2 Caratteristiche tecniche
Tabella 2- 1
Esecuzione standard dei motori Torque 1FW6
Caratteristica tecnica
Esecuzione
Tipo di motore
Motore sincrono con rotore a magneti permanenti multipolare
(numero poli rotore da 44 a 98)
Forma costruttiva
Componenti singoli: statore, rotore
Tipo di protezione a norma EN
60034-5 ed EN 60529
Motore: IP23
Tipo di raffreddamento
Raffreddamento ad acqua:
Il grado di protezione definitivo (grado di protezione minimo:
IP54) del motore integrato deve essere realizzato dal costruttore
della macchina.
raffreddamento a camicia, grandezza costruttiva 1FW609,
1FW613, 1FW615
raffreddamento integrato, grandezza costruttiva 1FW616,
1FW619, 1FW623, 1FW629
Pressione nel circuito di
raffreddamento
Max. 10 bar (statici)
Collegamento del gruppo di
raffreddamento
Motori con camicia di raffreddamento:
il collegamento deve essere eseguito dal cliente
Motori con raffreddamento integrato:
collegamento con/senza adattatore di allacciamento per
refrigerante; vedere il capitolo "Montaggio del motore"
Sorveglianza della temperatura
2 termistori PTC tripli con soglia di intervento +130/150°C
(secondo DIN 44081/44082) e 1 termistore PTC KTY84
(secondo EN 60034-11) nello statore
Isolamento dell'avvolgimento
statorico secondo EN 60034-1
Classe termica 155 (F)
Materiale magnetico
Materiale di terre rare
Collegamento elettrico
Uscita cavi:
assiale
radiale verso l'esterno
tangenziale (non per motori con conduttori singoli)
Tipo di collegamento:
cavi di potenza e dei segnali ad allacciamento fisso, estremità
dei cavi con conduttori liberi
Lunghezza: 2 m
cavi di potenza ad allacciamento fisso con conduttori singoli e
linea dei segnali, estremità dei cavi con conduttori liberi
Lunghezza: 1 m
cavi di potenza e dei segnali ad allacciamento fisso, confezionati
con connettori per cavo (non per motori con conduttori singoli)
Lunghezza: 0,5 m
26
Cavi del motore
Per la specifica dei cavi del motore vedere il capitolo "Interfacce"
Ondulazione di coppia
≤ 1,5 % M0
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.2 Caratteristiche tecniche
Condizioni ambientali per immagazzinaggio a lungo termine, trasporto e impiego stazionario
In conformità con DIN EN 60721-3-1 (per immagazzinaggio a lungo termine),
DIN EN 60721-3-2 (per il trasporto) e DIN EN 60721-3-3 (per impiego stazionario in luogo
protetto da intemperie)
Tabella 2- 2
Condizioni ambientali climatiche
Limite inferiore temperatura dell'aria:
- 5 °C
Limite superiore temperatura dell'aria:
+ 40 °C (differisce dalla classe 3K5)
Limite inferiore umidità relativa:
5%
Limite superiore umidità relativa:
85 %
Velocità di variazione temperatura:
< 0,5 K/min
Condensa:
non ammessa
Formazione di ghiaccio:
non ammessa
Immagazzinaggio a lungo termine:
classe 1K3 e classe 1Z1; differisce il limite superiore umidità relativa
Trasporto:
classe 2K2
Impiego stazionario:
classe 3K3
L'immagazzinaggio, il trasporto e il servizio sono ammessi soltanto in luoghi in cui sussista una protezione completa dagli
agenti atmosferici (aria interna o aria ambiente).
Tabella 2- 3
Condizioni ambientali biologiche
Immagazzinaggio a lungo termine:
classe 1B1
Trasporto:
classe 2B1
Impiego stazionario:
classe 3B1
Tabella 2- 4
Condizioni ambientali chimiche
Immagazzinaggio a lungo termine:
classe 1C1
Trasporto:
classe 2C1
Impiego stazionario:
classe 3C2
Luogo di utilizzo nelle immediate vicinanze di impianti industriali con emissioni
chimiche
Tabella 2- 5
Condizioni ambientali meccanicamente attive
Immagazzinaggio a lungo termine:
classe 1S2
Trasporto:
classe 2S2
Impiego stazionario:
classe 3S1
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
27
Descrizione del motore
2.2 Caratteristiche tecniche
Tabella 2- 6
Condizioni ambientali meccaniche
Immagazzinaggio a lungo termine:
classe 1M2
Trasporto:
classe 2M2
Impiego stazionario:
classe 3M3
Approvazione UL
I motori Torque descritti in questa documentazione sono approvati dalla Underwriters
Laboratories Inc. (USA), abbreviazione UL.
Validità
Sulla targhetta dei dati nominali sono riportate, in generale, le approvazioni del motore. Di
norma queste approvazioni valgono per lo stato di esercizio definito nei fogli dati. Ulteriori
informazioni sulle condizioni per la validità di un'approvazione possono essere chieste alla
filiale Siemens di competenza.
Le condizione d'installazione a norma Underwriters Laboratories Inc. (USA) - abbreviazione
UL - si possono consultare nelle Conditions of Acceptability.
Senso di rotazione
Il senso di rotazione del rotore del motore Torque integrato corrisponde al senso orario
(destrorso) se il motore stesso viene collegato con la sequenza delle fasi U, V, W. Questo si
può accertare osservando la flangia lato A del motore.
)ODQJLD%FRQXVFLWDFDYL
5RWD]LRQHGHVWURUVD
,OURWRUHUXRWDLQVHQVRRUDULR
6HTXHQ]DGHOOHIDVL89:
9LVWDVXOODIODQJLD$
)ODQJLD$
Figura 2-1
28
Direzione di osservazione per l'accertamento del senso di rotazione
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.3 Dati per la scelta e l'ordinazione
2.3
Dati per la scelta e l'ordinazione
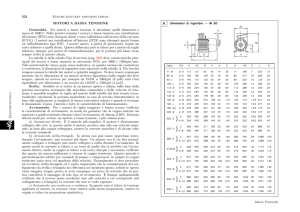
Tabella 2- 7
Motori Torque integrati; panoramica, parte 1 di 2
Codice di ordinazione /
Grandezza costruttiva
Coppia
nominale1) MN
in Nm
Coppia
massima
MMAX
in Nm
1FW6090-xxB05-0Fxx
113
179
5,6
9,5
140
46
1FW6090-xxB05-0Kxx
109
179
7,4
13
250
140
1FW6090-xxB07-0Kxx
154
251
9,5
16
220
120
1FW6090-xxB07-1Jxx
142
251
13
26
430
270
1FW6090-xxB10-0Kxx
231
358
7,9
13
82
8,7
1FW6090-xxB10-1Jxx
216
358
14
26
270
170
1FW6090-xxB15-1Jxx
338
537
15
26
150
78
1FW6090-xxB15-2Jxx
319
537
23
43
310
200
1FW6130-xxB05-0Kxx
241
439
9
18
130
47
Corrente
nominale1) IN
in A
Corrente
massima IMAX
in A
Num. di giri
max. alla
coppia
massima2)
nMAX,MN
in 1/min
Num. di giri
max. alla
coppia
massima2)
nMAX,MMAX
in 1/min
1FW6130-xxB05-1Jxx
217
439
14
32
310
180
1FW6130-xxB07-0Kxx
344
614
10
20
96
21
1FW6130-xxB07-1Jxx
324
614
15
32
200
110
1FW6130-xxB10-1Jxx
484
878
16
32
120
50
1FW6130-xxB10-2Jxx
450
878
24
53
250
150
1FW6130-xxB15-1Jxx
744
1320
18
36
78
14
1FW6130-xxB15-2Jxx
714
1320
26
54
150
77
1FW6150-xxB05-1Jxx
338
710
17
44
230
110
1FW6150-xxB05-4Fxx
298
710
36
100
650
330
1FW6150-xxB07-2Jxx
470
994
25
66
260
130
1FW6150-xxB07-4Fxx
445
994
38
100
450
230
1FW6150-xxB10-2Jxx
688
1420
26
66
170
76
1FW6150-xxB10-4Fxx
664
1420
40
100
300
150
1FW6150-xxB15-2Jxx
1050
2130
26
66
100
32
1FW6150-xxB15-4Fxx
1030
2130
41
100
190
89
1FW6160-xxB05-1Jxx
431
716
16
31
140
84
1FW6160-xxB05-2Jxx
404
716
24
49
250
150
1FW6160-xxB05-5Gxx
314
716
36
98
590
320
1FW6160-xxB07-1Jxx
620
1000
16
31
96
53
1FW6160-xxB07-2Jxx
594
1000
25
49
170
100
1FW6160-xxB07-5Gxx
514
1000
43
98
390
230
1FW6160-xxB07-8Fxx
432
1000
51
140
610
330
1FW6160-xxB10-1Jxx
903
1430
17
31
60
29
1FW6160-xxB10-2Jxx
878
1430
26
49
110
65
1FW6160-xxB10-5Gxx
804
1430
47
98
260
160
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
29
Descrizione del motore
2.3 Dati per la scelta e l'ordinazione
Codice di ordinazione /
Grandezza costruttiva
Coppia
nominale1) MN
in Nm
1FW6160-xxB10-8Fxx
732
Coppia
massima
MMAX
in Nm
1430
Corrente
nominale1) IN
in A
Corrente
massima IMAX
in A
Num. di giri
max. alla
coppia
massima2)
nMAX,MN
in 1/min
Num. di giri
max. alla
coppia
massima2)
nMAX,MMAX
in 1/min
61
140
390
230
1FW6160-xxB10-2Pxx
622
1430
73
190
600
330
1FW6160-xxB15-2Jxx
1350
2150
26
49
66
34
1FW6160-xxB15-5Gxx
1280
2150
50
98
160
97
1FW6160-xxB15-8Fxx
1220
2150
68
140
240
150
1FW6160-xxB15-2Pxx
1120
2150
88
190
360
220
1FW6160-xxB15-0Wxx
961
2150
100
280
560
320
1FW6160-xxB20-5Gxx
1750
2860
52
98
110
68
1FW6160-xxB20-8Fxx
1690
2860
72
140
170
110
1FW6160-xxB20-2Pxx
1600
2860
95
190
260
160
1FW6160-xxB20-0Wxx
1460
2860
120
280
400
240
1FW6190-xxB05-1Jxx
633
990
17
31
97
54
1FW6190-xxB05-2Jxx
605
990
24
47
160
96
1FW6190-xxB05-5Gxx
509
990
40
95
380
210
1FW6190-xxB07-1Jxx
905
1390
17
31
63
33
1FW6190-xxB07-2Jxx
879
1390
25
47
110
64
1FW6190-xxB07-5Gxx
791
1390
44
95
250
150
1FW6190-xxB07-8Fxx
704
1390
56
130
390
220
1FW6190-xxB10-1Jxx
1310
1980
17
31
38
14
1FW6190-xxB10-2Jxx
1290
1980
26
47
70
39
1FW6190-xxB10-5Gxx
1210
1980
48
95
170
100
1FW6190-xxB10-8Fxx
1130
1980
64
130
260
150
1FW6190-xxB10-2Pxx
955
1980
84
210
450
250
1FW6190-xxB15-2Jxx
1970
2970
26
47
40
17
1FW6190-xxB15-5Gxx
1890
2970
50
95
100
62
1FW6190-xxB15-8Fxx
1820
2970
69
130
160
97
1FW6190-xxB15-2Pxx
1670
2970
99
210
270
160
1FW6190-xxB15-0Wxx
1540
2970
110
270
370
210
1FW6190-xxB20-5Gxx
2570
3960
51
95
73
42
1FW6190-xxB20-8Fxx
2500
3960
71
130
110
68
1FW6190-xxB20-2Pxx
2360
3960
100
210
200
120
1FW6190-xxB20-0Wxx
2250
3960
120
270
260
160
1FW6230-xxB05-1Jxx
799
1320
15
31
69
34
1FW6230-xxB05-2Jxx
774
1320
22
45
110
59
1FW6230-xxB05-5Gxx
660
1320
40
100
290
160
1FW6230-xxB07-1Jxx
1140
1840
16
31
45
19
1FW6230-xxB07-2Jxx
1120
1840
22
45
73
38
30
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.3 Dati per la scelta e l'ordinazione
Codice di ordinazione /
Grandezza costruttiva
Coppia
nominale1) MN
in Nm
1FW6230-xxB07-5Gxx
1010
Coppia
massima
MMAX
in Nm
1840
Corrente
nominale1) IN
in A
Corrente
massima IMAX
in A
Num. di giri
max. alla
coppia
massima2)
nMAX,MN
in 1/min
Num. di giri
max. alla
coppia
massima2)
nMAX,MMAX
in 1/min
44
100
190
110
1FW6230-xxB07-8Fxx
923
1840
56
130
290
160
1FW6230-xxB10-2Jxx
1630
2630
23
45
46
21
1FW6230-xxB10-5Gxx
1520
2630
48
100
130
74
1FW6230-xxB10-8Fxx
1450
2630
62
130
190
110
1FW6230-xxB10-2Pxx
1320
2630
80
190
290
160
1FW6230-xxB15-4Cxx
2440
3950
32
63
43
19
1FW6230-xxB15-5Gxx
2380
3950
49
100
80
44
1FW6230-xxB15-8Fxx
2310
3950
66
130
120
67
1FW6230-xxB15-2Pxx
2190
3950
90
190
180
100
1FW6230-xxB15-0Wxx
2020
3950
110
270
270
150
1FW6230-xxB20-5Gxx
3230
5260
51
100
56
29
1FW6230-xxB20-8Fxx
3160
5260
69
130
84
47
1FW6230-xxB20-2Pxx
3050
5260
94
190
130
74
1FW6230-xxB20-0Wxx
2890
5260
120
270
190
110
1FW6290-xxB07-5Gxx
2060
4000
52
110
110
59
1FW6290-xxB07-0Lxx
1910
4000
86
210
210
110
1FW6290-xxB07-2Pxx
1810
4000
100
270
270
150
1FW6290-xxB11-7Axx
3320
6280
59
130
73
40
1FW6290-xxB11-0Lxx
3200
6280
91
210
130
71
1FW6290-xxB11-2Pxx
3100
6280
110
270
170
93
1FW6290-xxB15-7Axx
4590
8570
61
130
53
28
1FW6290-xxB15-0Lxx
4480
8570
94
210
89
50
1FW6290-xxB15-2Pxx
4390
8570
110
270
120
67
1FW6290-xxB20-0Lxx
5760
10900
95
210
68
38
1FW6290-xxB20-2Pxx
5670
10900
120
270
91
51
Per raffreddamento ad acqua a 35 °C temperatura di mandata; Valori di velocità e valori di corrente per tensione del
circuito intermedio convertitore UZK = 600 V (regolata) / tensione di ingresso convertitore (valore efficace)
Uamax = 425 V (regolata)
1)
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
2)
31
Descrizione del motore
2.3 Dati per la scelta e l'ordinazione
Tabella 2- 8
Motori Torque integrati; panoramica, parte 2 di 2
Codice di ordinazione /
grandezza costruttiva
Potenza
dissipata
nominale1)
PV,N
in kW
Diametro
esterno
statore
in mm
Diametro
interno rotore
in mm
Lunghezza
statore
in mm
Massa
motore3)
in kg
Momento
d'inerzia
rotore JL
in 10-2kgm2
1FW6090-xxB05-0Fxx
2,19
230
140
90
9,2
1,52
1FW6090-xxB05-0Kxx
2,12
230
140
90
9,2
1,52
1FW6090-xxB07-0Kxx
2,69
230
140
110
12,2
2,2
1FW6090-xxB07-1Jxx
2,67
230
140
110
12,2
2,2
1FW6090-xxB10-0Kxx
3,5
230
140
140
17,2
3,09
1FW6090-xxB10-1Jxx
3,5
230
140
140
17,2
3,09
1FW6090-xxB15-1Jxx
4,87
230
140
190
27,2
4,65
1FW6090-xxB15-2Jxx
4,96
230
140
190
27,2
4,65
1FW6130-xxB05-0Kxx
2,93
310
220
90
13,2
6,37
1FW6130-xxB05-1Jxx
2,93
310
220
90
13,2
6,37
1FW6130-xxB07-0Kxx
3,73
310
220
110
18,2
8,92
1FW6130-xxB07-1Jxx
3,71
310
220
110
18,2
8,92
1FW6130-xxB10-1Jxx
4,88
310
220
140
25,2
12,7
1FW6130-xxB10-2Jxx
4,98
310
220
140
25,2
12,7
1FW6130-xxB15-1Jxx
6,81
310
220
190
38,2
19,1
1FW6130-xxB15-2Jxx
6,81
310
220
190
38,2
19,1
1FW6150-xxB05-1Jxx
2,57
385
265
110
21,7
10,1
1FW6150-xxB05-4Fxx
2,52
385
265
110
21,7
10,1
1FW6150-xxB07-2Jxx
3,28
385
265
130
33,5
14,2
1FW6150-xxB07-4Fxx
3,23
385
265
130
33,5
14,2
1FW6150-xxB10-2Jxx
4,36
385
265
160
47,5
20,9
1FW6150-xxB10-4Fxx
4,28
385
265
160
47,5
20,9
1FW6150-xxB15-2Jxx
6,14
385
265
210
70,8
31,3
1FW6150-xxB15-4Fxx
6,04
385
265
210
70,8
31,3
1FW6160-xxB05-1Jxx
2,84
440
280
110
36,3
19
1FW6160-xxB05-2Jxx
2,85
440
280
110
36,3
19
1FW6160-xxB05-5Gxx
2,88
440
280
110
36,3
19
1FW6160-xxB07-1Jxx
3,59
440
280
130
48,3
25,8
1FW6160-xxB07-2Jxx
3,61
440
280
130
48,3
25,8
1FW6160-xxB07-5Gxx
3,64
440
280
130
48,3
25,8
1FW6160-xxB07-8Fxx
3,73
440
280
130
48,3
25,8
1FW6160-xxB10-1Jxx
4,72
440
280
160
66,3
36
1FW6160-xxB10-2Jxx
4,74
440
280
160
66,3
36
1FW6160-xxB10-5Gxx
4,77
440
280
160
66,3
36
1FW6160-xxB10-8Fxx
4,9
440
280
160
66,3
36
1FW6160-xxB10-2Pxx
4,77
440
280
170
67,4
36
1FW6160-xxB15-2Jxx
6,62
440
280
210
95,3
53,1
32
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.3 Dati per la scelta e l'ordinazione
Codice di ordinazione /
grandezza costruttiva
Potenza
dissipata
nominale1)
PV,N
in kW
Diametro
esterno
statore
in mm
Diametro
interno rotore
in mm
Lunghezza
statore
in mm
Massa
motore3)
in kg
Momento
d'inerzia
rotore JL
in 10-2kgm2
1FW6160-xxB15-5Gxx
6,67
440
280
210
95,3
53,1
1FW6160-xxB15-8Fxx
6,84
440
280
210
95,3
53,1
1FW6160-xxB15-2Pxx
6,67
440
280
220
96,4
53,1
1FW6160-xxB15-0Wxx
6,84
440
280
220
96,4
53,1
1FW6160-xxB20-5Gxx
8,57
440
280
260
124,3
70,1
1FW6160-xxB20-8Fxx
8,79
440
280
260
124,3
70,1
1FW6160-xxB20-2Pxx
8,57
440
280
270
125,4
70,1
1FW6160-xxB20-0Wxx
8,79
440
280
270
125,4
70,1
1FW6190-xxB05-1Jxx
3,51
502
342
110
42,8
35,8
1FW6190-xxB05-2Jxx
3,51
502
342
110
42,8
35,8
1FW6190-xxB05-5Gxx
3,51
502
342
110
42,8
35,8
1FW6190-xxB07-1Jxx
4,44
502
342
130
55,8
48,6
1FW6190-xxB07-2Jxx
4,44
502
342
130
55,8
48,6
1FW6190-xxB07-5Gxx
4,44
502
342
130
55,8
48,6
1FW6190-xxB07-8Fxx
4,57
502
342
130
55,8
48,6
1FW6190-xxB10-1Jxx
5,83
502
342
160
75,8
67,8
1FW6190-xxB10-2Jxx
5,83
502
342
160
75,8
67,8
1FW6190-xxB10-5Gxx
5,83
502
342
160
75,8
67,8
1FW6190-xxB10-8Fxx
6
502
342
160
75,8
67,8
1FW6190-xxB10-2Pxx
5,87
502
342
170
77,1
67,8
1FW6190-xxB15-2Jxx
8,14
502
342
210
107,8
99,8
1FW6190-xxB15-5Gxx
8,14
502
342
210
107,8
99,8
1FW6190-xxB15-8Fxx
8,39
502
342
210
107,8
99,8
1FW6190-xxB15-2Pxx
8,21
502
342
220
109,1
99,8
1FW6190-xxB15-0Wxx
8,39
502
342
220
109,1
99,8
1FW6190-xxB20-5Gxx
10,5
502
342
260
136,2
132
1FW6190-xxB20-8Fxx
10,8
502
342
260
136,2
132
1FW6190-xxB20-2Pxx
10,5
502
342
270
137,5
132
1FW6190-xxB20-0Wxx
10,8
502
342
270
137,5
132
1FW6230-xxB05-1Jxx
3,54
576
416
110
44,8
62,2
1FW6230-xxB05-2Jxx
3,65
576
416
110
44,8
62,2
1FW6230-xxB05-5Gxx
3,58
576
416
110
44,8
62,2
1FW6230-xxB07-1Jxx
4,47
576
416
130
58,8
84,3
1FW6230-xxB07-2Jxx
4,61
576
416
130
58,8
84,3
1FW6230-xxB07-5Gxx
4,52
576
416
130
58,8
84,3
1FW6230-xxB07-8Fxx
4,53
576
416
130
58,8
84,3
1FW6230-xxB10-2Jxx
6,05
576
416
160
81,8
118
1FW6230-xxB10-5Gxx
6,09
576
416
160
81,8
118
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
33
Descrizione del motore
2.4 Codice di ordinazione
Codice di ordinazione /
grandezza costruttiva
Potenza
dissipata
nominale1)
PV,N
in kW
Diametro
esterno
statore
in mm
Diametro
interno rotore
in mm
Lunghezza
statore
in mm
Massa
motore3)
in kg
Momento
d'inerzia
rotore JL
in 10-2kgm2
1FW6230-xxB10-8Fxx
5,95
576
416
160
81,8
118
1FW6230-xxB10-2Pxx
6,1
576
416
160
81,8
118
1FW6230-xxB15-4Cxx
8,51
576
416
210
117,8
173
1FW6230-xxB15-5Gxx
8,29
576
416
210
117,8
173
1FW6230-xxB15-8Fxx
8,31
576
416
210
117,8
173
1FW6230-xxB15-2Pxx
8,53
576
416
210
117,8
173
1FW6230-xxB15-0Wxx
8,31
576
416
220
119,4
173
1FW6230-xxB20-5Gxx
10,7
576
416
260
153,8
228
1FW6230-xxB20-8Fxx
10,7
576
416
260
153,8
228
1FW6230-xxB20-2Pxx
11
576
416
260
153,8
228
1FW6230-xxB20-0Wxx
10,7
576
416
270
155,4
228
1FW6290-xxB07-5Gxx
5,19
730
520
140
103,6
228
1FW6290-xxB07-0Lxx
5,19
730
520
140
103,6
228
1FW6290-xxB07-2Pxx
5,2
730
520
160
108,8
228
1FW6290-xxB11-7Axx
7,13
730
520
180
159
334
1FW6290-xxB11-0Lxx
7,14
730
520
180
159
334
1FW6290-xxB11-2Pxx
7,16
730
520
200
164,2
334
1FW6290-xxB15-7Axx
9,08
730
520
220
214,6
440
1FW6290-xxB15-0Lxx
9,09
730
520
220
214,6
440
1FW6290-xxB15-2Pxx
9,12
730
520
240
219,8
440
1FW6290-xxB20-0Lxx
11
730
520
260
260,6
546
1FW6290-xxB20-2Pxx
11,1
730
520
280
265,8
546
1)
Per raffreddamento ad acqua a 35 °C temperatura di mandata 3) Massa motore senza massa dei blocchi di sicurezza
del trasporto
2.4
Codice di ordinazione
2.4.1
Composizione dei codici di ordinazione
Il codice di ordinazione (MLFB) è costituito da una combinazione di cifre e lettere. Si
suddivide in tre blocchi uniti tra di loro da un trattino. Vedere in proposito le figure seguenti.
Il primo blocco è di 7 caratteri alfanumerici e contraddistingue il tipo di motore (1FW6) e la
grandezza costruttiva dello statore (in mm). Il secondo e il terzo blocco codificano altre
caratteristiche.
Fare attenzione perché non tutte le possibili combinazioni teoriche sono disponibili.
34
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.4 Codice di ordinazione
2.4.2
Motore Torque integrato standard 1FW6
): [[ [ % [[ [[ [
0RWRUHDGDOEHURFDYRDGD]LRQDPHQWRGLUHWWRFRPH
PDFFKLQDVLQFURQDWULIDVH
*UDQGH]]DFRVWUXWWLYDGLDPHWURHVWHUQRVWDWRUH
PP
PP
PP
PP
PP
PP
PP
0RWRUHGDLQFDVVRSUHPRQWDWR
&RPSRQHQWHSRVL]LRQHGHOOHLQWHUIDFFH
3 FDPLFLDGLUDIIUHGGDPHQWRHXVFLWDFDYRDVVLDOH
4 FDPLFLDGLUDIIUHGGDPHQWRHXVFLWDFDYRDVVLDOHYHUVRO
HVWHUQR
1 FDPLFLDGLUDIIUHGGDPHQWRHXVFLWDFDYRWDQJHQ]LDOH
: UDIIUHGGDPHQWRLQWHJUDWRHXVFLWDFDYRDVVLDOH
9 UDIIUHGGDPHQWRLQWHJUDWRHXVFLWDFDYRUDGLDOHYHUVRO
HVWHUQR
7 UDIIUHGGDPHQWRLQWHJUDWRHXVFLWDFDYRUDGLDOH
/XQJKH]]DSDUWHDWWLYDLQ>FP@
PP
PP
PP
PP
PP
PP
)DEELVRJQRGLFRUUHQWHLQGLFDWRVXO0RWRU0RGXOH
) 6,1$0,&660RWRU0RGXOH$$
. 6,1$0,&660RWRU0RGXOH$$
- 6,1$0,&660RWRU0RGXOH$$
- 6,1$0,&660RWRU0RGXOH$$
& 6,1$0,&660RWRU0RGXOH$$
) 6,1$0,&660RWRU0RGXOH$$
* 6,1$0,&660RWRU0RGXOH$$
$ 6,1$0,&660RWRU0RGXOH$$
) 6,1$0,&660RWRU0RGXOH$$
/ 6,1$0,&660RWRU0RGXOH$$
3 6,1$0,&660RWRU0RGXOH$$RSSXUH$$
: 6,1$0,&660RWRU0RGXOH$$
7LSRGLFROOHJDPHQWR
% FDYLGLSRWHQ]DDGDOODFFLDPHQWRILVVRFRQGXWWRULVLQJROLHOLQHDGHLVHJQDOLFRQHVWUHPLW¢GHL
FDYLFRQFRQGXWWRULOLEHUL
/XQJKH]]DP
& FDYLGLSRWHQ]DHGLVHJQDOHDGDOODFFLDPHQWRILVVRFRQHVWUHPLW¢GHLFDYLFRQFRQGXWWRULOLEHUL
/XQJKH]]DP
& FDYLGLSRWHQ]DHGLVHJQDOHDGDOODFFLDPHQWRILVVRFRQFRQQHWWRULFRQIH]LRQDWL
/XQJKH]]DP
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
35
Descrizione del motore
2.4 Codice di ordinazione
2.4.3
Statore come componente singolo
): [[ [ % [[ [[ [
0RWRUHDGDOEHURFDYRDGD]LRQDPHQWRGLUHWWRFRPH
PDFFKLQDVLQFURQDWULIDVH
*UDQGH]]DFRVWUXWWLYDGLDPHWURHVWHUQRVWDWRUH
PP
PP
PP
PP
PP
PP
PP
&RPSRQHQWHVLQJROR
&RPSRQHQWHSRVL]LRQHGHOOHLQWHUIDFFH
3 FDPLFLDGLUDIIUHGGDPHQWRHXVFLWDFDYRDVVLDOH
4 FDPLFLDGLUDIIUHGGDPHQWRHXVFLWDFDYRDVVLDOHYHUVRO
HVWHUQR
1 FDPLFLDGLUDIIUHGGDPHQWRHXVFLWDFDYRWDQJHQ]LDOH
: UDIIUHGGDPHQWRLQWHJUDWRHXVFLWDFDYRDVVLDOH
9 UDIIUHGGDPHQWRLQWHJUDWRHXVFLWDFDYRUDGLDOHYHUVRO
HVWHUQR
7 UDIIUHGGDPHQWRLQWHJUDWRHXVFLWDFDYRUDGLDOH
/XQJKH]]DSDUWHDWWLYDLQ>FP@
PP
PP
PP
PP
PP
PP
)DEELVRJQRGLFRUUHQWHLQGLFDWRVXO0RWRU0RGXOH
) 6,1$0,&660RWRU0RGXOH$$
. 6,1$0,&660RWRU0RGXOH$$
- 6,1$0,&660RWRU0RGXOH$$
- 6,1$0,&660RWRU0RGXOH$$
& 6,1$0,&660RWRU0RGXOH$$
) 6,1$0,&660RWRU0RGXOH$$
* 6,1$0,&660RWRU0RGXOH$$
$ 6,1$0,&660RWRU0RGXOH$$
) 6,1$0,&660RWRU0RGXOH$$
/ 6,1$0,&660RWRU0RGXOH$$
3 6,1$0,&660RWRU0RGXOH$$RSSXUH$$
: 6,1$0,&660RWRU0RGXOH$$
7LSRGLFROOHJDPHQWR
& FDYLGLSRWHQ]DHGLVHJQDOHDGDOODFFLDPHQWRILVVRFRQFRQQHWWRULFRQIH]LRQDWL
/XQJKH]]DP
36
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.4 Codice di ordinazione
2.4.4
Rotore come componente singolo
):
[[ 5 $ [[ $$
):
[[ ( $ $$
0RWRUHDGDOEHURFDYRDGD]LRQDPHQWRGLUHWWRFRPH
PDFFKLQDVLQFURQDWULIDVH
*UDQGH]]DFRVWUXWWLYDGLDPHWURHVWHUQRVWDWRUH
PP
PP
PP
PP
PP
PP
PP
&RPSRQHQWHVLQJROR
5RWRUH
/XQJKH]]DSDUWHDWWLYDLQ>FP@
PP
PP
PP
PP
PP
PP
2.4.5
O-ring
0RWRUHDGDOEHURFDYRDGD]LRQDPHQWRGLUHWWRFRPH
PDFFKLQDVLQFURQDWULIDVH
*UDQGH]]DFRVWUXWWLYDGLDPHWURHVWHUQRVWDWRUH
PP
PP
PP
&RGLFHSDUWLGLULFDPELRDFFHVVRUL
( $QHOORGLWHQXWDWRURLGDOH2ULQJ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
37
Descrizione del motore
2.4 Codice di ordinazione
2.4.6
Adattatore di allacciamento per refrigerante
):
[[ % $ $$
0RWRUHDGDOEHURFDYRDGD]LRQDPHQWRGLUHWWRFRPH
PDFFKLQDVLQFURQDWULIDVH
$GDWWDWRUHGLDOODFFLDPHQWRSHUJUDQGH]]HFRVWUXWWLYH
H
$GDWWDWRUHGLDOODFFLDPHQWRSHUJUDQGH]]DFRVWUXWWLYD
&RGLFHSDUWLGLULFDPELRDFFHVVRUL
% &ROOHJDPHQWRGHOUDGLDWRUHSHUPRWRUHLQWHJUDWRFRQUDIIUHGGDPHQWRLQWHJUDWR
QRQGLVSRQLELOHSHUOHJUDQGH]]HFRVWUXWWLYHHSHUFK«TXHVWLVRQRLPRWRULFRQ
FDPLFLDGLUDIIUHGGDPHQWRUDFFRUGRFRPELQDWRSHUUDIIUHGGDPHQWRSULQFLSDOHHGL
SUHFLVLRQH
FDEODJJLRLQWHUQRDVVLDOHHUDGLDOHHVWHUQR
4XHVWDªXQ
RS]LRQHGDRUGLQDUHVHSDUDWDPHQWH
2.4.7
2.4.8
Connettore a spina
Tipo di connettore
Grandezza del connettore
MLFB
Collegamento di potenza
1,5
6FX2003-0LA10
Collegamento di potenza
1
6FX2003-0LA00
Collegamento del segnale
M17
6FX2003-0SU07
Indicazioni per l'ordinazione
Il motore integrato completo (statore, rotore con blocchi di fissaggio per il trasporto) può
essere ordinato specificando un unico codice di ordinazione (MLFB). Per le parti di ricambio
e gli accessori si devono utilizzare i relativi codici di ordinazione (vedere gli esempi di
ordinazione).
Nota
Dato che l'uscita cavi non può essere modificata in un secondo tempo, al momento
dell'ordinazione occorre fare attenzione a indicare il codice di ordinazione (MLFB) corretto.
L'adattatore di allacciamento per refrigerante non è contenuto nell'esecuzione standard del
motore Torque integrato. Per i codici MLFB separati, vedere la figura "Codice di ordinazione
per adattatore di allacciamento per refrigerante".
Nella scelta di un motore fare riferimento a quanto specificato nelle tabelle "Dati dei cavi di
alimentazione del motore" nel capitolo "Interfacce".
38
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Descrizione del motore
2.4 Codice di ordinazione
Nota
Se per motivi costruttivi possono essere montati solo elementi singoli (statore e rotore
separati), questi possono essere ordinati e forniti separatamente.
PERICOLO
Per via del pericolo di schiacciamento dovuto alle forze di attrazione del rotore, in caso di
montaggio separato di statore e rotore il cliente deve mettere a disposizione un dispositivo
di assemblaggio.
2.4.9
Esempi di ordinazione
Esempio 1:
Statore e rotore premontati con blocchi di fissaggio per il trasporto; camicia di
raffreddamento; uscita cavi assiale per il sistema di azionamento SINAMICS S120 Motor
Module 18 A / 36 A:
MLFB 1FW6090–0PB15–1JC2
Esempio 2:
Statore e rotore premontati con blocchi di fissaggio per il trasporto; raffreddamento integrato;
uscita cavi radiale verso l'esterno per il sistema di azionamento SINAMICS S120 Motor
Module 18 A / 36 A:
MLFB 1FW6190–0VB07–1JC2
Esempio 3:
Adattatore di allacciamento per refrigerante, assiale/radiale per le grandezze costruttive
1FW616, 1FW619 und 1FW623:
MLFB 1FW6160–1BA00–0AA0
Esempio 4:
Componente singolo / parte di ricambio statore: MLFB 1FW6190–8VB07–1JD2
Componente singolo / parte di ricambio rotore: MLFB 1FW6190–8RA07–0AA0
Componente singolo / parte di ricambio O-ring: MLFB 1FW6090–1EA00–0AA0
(per grandezza costruttiva 1FW609)
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
39
Descrizione del motore
2.5 Targhetta dati motore
2.5
Targhetta dati motore
Nota
Su ogni statore è applicata una targhetta dati motore. Viene inoltre fornita una seconda
targhetta dati motore, che il cliente all'occorrenza può applicare sulla macchina in cui è
installato il motore. Evitare l'uso improprio delle targhette dati motore! Se una targhetta dati
viene rimossa dal motore o dalla macchina, deve essere resa inutilizzabile.
Se statore e rotore vengono separati in un secondo tempo, occorre accertarsi che sia
possibile ripristinare la corretta associazione di statore e rotore.
Indicazioni sulla targhetta dati motore
1XPHURGLIDVL
1XPHURGLJLULPD[DOOD
FRSSLDQRPLQDOH
&RGLFHGLRUGLQD]LRQH
0/)%
7LSRGLPRWRUH
9DORUHHIILFDFHPD[
DPPHVVRGHOOD
WHQVLRQHDLPRUVHWWLGHOPRWRUH
&RUUHQWHG
XVFLWD
QRPLQDOH
&RSSLD
QRPLQDOH
$SSURYD]LRQL
FRQIRUPLW¢
&ODVVH
GLWHPSHUDWXUD
1XPHURGLVHULH
*UDGRGL
SURWH]LRQH
7HPSHUDWXUDDPELHQWHPD[DPPHVVDDOOD
FRUUHQWHQRPLQDOH
6HWWLPDQDHDQQRGL
IDEEULFD]LRQH
Figura 2-2
Targhetta dati motore 1FW6 (schema)
Nota
I dati della targhetta dati motore sono validi solo in combinazione con il relativo rotore.
40
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.1
3
Panoramica della struttura del motore
Componenti del motore
Il motore Torque integrato è costituito dai seguenti componenti:
● Statore
È composto da un nucleo di ferro e da un avvolgimento a 3 fasi.
Per migliorare la dispersione del calore dissipato, l'avvolgimento è chiuso in colata; il
motore è previsto per raffreddamento a liquido; refrigerante: acqua (radiatore principale).
Il sistema di raffreddamento è realizzato in maniera diversa per le varie grandezze
costruttive (diametri esterni).
● Rotore
È la parte di reazione del motore. È composto da un albero cavo cilindrico in acciaio, sul
quale sono montati i magneti permanenti.
● Adattatore di allacciamento per refrigerante (opzione)
Nei motori con raffreddamento integrato, se il radiatore principale e il radiatore di
precisione sono collegati in parallelo a un dispositivo di raffreddamento, è possibile
utilizzare un adattatore di allacciamento per refrigerante.
Motori con camicia di raffreddamento
La superficie della camicia di raffreddamento del motore è formata da scanalature anulari
che insieme ad un sistema esterno che deve essere approntato dal costruttore della
macchina formano un circuito chiuso del liquido di raffreddamento.
Il tubo di mandata e il tubo di ritorno del liquido di raffreddamento devono essere predisposti
sul sistema esterno dal costruttore della macchina.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
41
Componenti del motore integrato e opzioni
3.1 Panoramica della struttura del motore
5RWRUHFRQ
PDJQHWLSHUPDQHQWL
6WDWRUHFRQ
FDPLFLDGL
UDIIUHGGDPHQWR
%ORFFKLGLVLFXUH]]DSHULOWUDVSRUWR
&ROOHJDPHQWLHOHWWULFL
Figura 3-1
Componenti del motore della serie 1FW6 con camicia di raffreddamento
Contenuto della fornitura del motore Torque integrato con camicia di raffreddamento
● Rotore tenuto nello statore tramite blocchi di sicurezza per il trasporto e lamina
distanziale
● Statore con camicia di raffreddamento e un cavo ciascuno, con spina o con estremità
libere, per collegamento di potenza e di segnale
● Blocchi di sicurezza per il trasporto con distanziali e viti
● O-ring (quantità: 2) 2)
● Targhetta dei dati tecnici incollata; seconda targhetta dei dati tecnici da applicare
● Avvertenze di sicurezza
Motori con raffreddamento integrato
Questi motori dispongono di un sistema di raffreddamento integrato a doppio circuito e
pronto per il collegamento; essi sono quindi ben isolati termicamente rispetto alla struttura
meccanica circostante.
Il sistema di raffreddamento a doppio circuito è costituito da radiatore principale e di
precisione
(in base al principio Thermo-Sandwich®).
Un circuito di raffreddamento interno (radiatore principale) dissipa la maggior parte delle
perdite dell'avvolgimento Pv dello statore. Tra il pacchetto statorico e le flange di montaggio
dello statore uno strato termoisolante evita che il flusso di calore passi dall'avvolgimento del
motore alla struttura della macchina.
Il calore che passa comunque attraverso lo strato termoisolante viene per gran parte
assorbito e dissipato da un secondo termodispersore (radiatore di precisione) situato sulle
superfici delle flange. In questo modo si raggiunge una temperatura bassa costante sulle
superfici di montaggio dello statore in tutte le condizioni di funzionamento.
42
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.1 Panoramica della struttura del motore
5RWRUHFRQ
PDJQHWLSHUPDQHQWL
6WDWRUHFRQ
UDIIUHGGDPHQWR
LQWHJUDWR
&ROOHJDPHQWLHOHWWULFL
%ORFFKLGLVLFXUH]]D
SHULOWUDVSRUWR
&ROOHJDPHQWRGHOUDGLDWRUH
Figura 3-2
Componenti del motore della serie 1FW6 con raffreddamento integrato
Contenuto della fornitura del motore Torque integrato con raffreddamento integrato
● Rotore tenuto nello statore tramite blocchi di sicurezza per il trasporto e lamina
distanziale
● Statore con raffreddamento a doppio circuito pronto per l'installazione e un cavo
ciascuno, con spina o con estremità libere, per collegamento di potenza e di segnale
● Blocchi di sicurezza per il trasporto con distanziali e viti
● Targhetta dei dati tecnici incollata; seconda targhetta dei dati tecnici da applicare
● Avvertenze di sicurezza
Tipo di raffreddamento
Lo statore dei motori Torque integrati possiede un radiatore a liquido per la dissipazione del
calore.
L'esecuzione del tipo di raffreddamento dipende dalla grandezza costruttiva (diametro
esterno) del motore; vedere la seguente tabella.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
43
Componenti del motore integrato e opzioni
3.2 Protezione termica del motore
Tabella 3- 1
Esecuzione del tipo di raffreddamento
Grandezza costruttiva
Camicia di raffreddamento
1FW609
X
1FW613
X
1FW615
X
Raffreddamento integrato
1FW616
X
1FW619
X
1FW623
X
1FW629
X
3.2
Protezione termica del motore
3.2.1
Descrizione dei sensori di temperatura
Sorveglianza della temperatura
Per proteggere lo statore da elevate sollecitazioni termiche non ammesse e anche per
controllare la temperatura durante la messa in servizio o durante il normale funzionamento,
gli statori dei motori 1FW6 sono equipaggiati con i due circuiti di sorveglianza della
temperatura Temp-S e Temp-F descritti di seguito:
Temp–S
Per la sorveglianza dell'avvolgimento del motore sono previsti due circuiti termici di
disinserzione, costituiti da sensori di temperatura a termistori (elementi PTC):
● 1 elemento PTC 130°C per avvolgimento di fase (U, V e W), con soglia di intervento a
130°C, e
● 1 elemento PTC 150°C per avvolgimento di fase (U, V e W), con soglia di intervento a
150°C.
Ciascuno degli elementi PTC dei due circuiti termici di disinserzione è collegato in serie a un
termistore PTC triplo.
Le caratteristiche degli elementi PTC corrispondono alle normative DIN VDE 0660 parte 303,
DIN 44081 e DIN 44082; vedere al proposito anche la tabella seguente.
Inoltre la connessione del conduttore è sorvegliata con PTC 80°C sulla carcassa. Un
PTC 80°C è collegato al termistore PTC triplo 130°C; un PTC 80°C è collegato al termistore
PTC triplo 150°C.
Funzionamento:
Ogni elemento PTC possiede una caratteristica di "quasi intervento", ovvero
all'approssimarsi della temperatura di intervento nominale ϑNAT (soglia di intervento) la
resistenza aumenta improvvisamente. La ridotta capacità termica e il buon contatto termico
44
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.2 Protezione termica del motore
dell'elemento PTC con l'avvolgimento del motore consentono ai sensori e quindi al sistema
di reagire rapidamente ad una temperatura dello statore più elevata del dovuto.
Tabella 3- 2
Dati tecnici del termistore PTC triplo
Denominazione
Descrizione
Tipo
Termist. PTC triplo (secondo DIN 44082- M180)
Temperatura di intervento
(temperatura nominale di intervento ϑNAT)
130 °C ± 5 K
150 °C ± 5 K
Resistenza a freddo (20 °C) sul termistore PTC
triplo
≤ 3 · 250 Ω (750 Ω); vedere curva caratteristica
da - 20 °C a ϑNAT - 20K
Minima resistenza a caldo sul termistore PTC
triplo
a T = ϑNAT – 5 K
≤ 3 · 550 Ω (1650 Ω); vedere curva caratteristica
≥ 3 · 1330 Ω (3990 Ω); vedere curva caratteristica
a T = ϑNAT + 5 K
≥ 3 · 4000 Ω (12000 Ω); vedere curva
caratteristica
a T = ϑNAT + 15 K
Collegamento
Collegare al modulo SME12x il cavo di segnale
dotato di connettore.
Impiego
Il collegamento di un termistore PTC triplo è
obbligatorio per proteggere il motore
da sovratemperature. Il circuito Temp-S deve
essere collegato almeno con la temperatura di
intervento nominale di 130°C.
Curva caratteristica tipica R(ϑ) di un sensore di
temperatura PTC
Temp-S è formato da 3 sensori di temperatura
PTC collegati in serie!
37&
Nota
In funzione del PTC aggiuntivo per la sorveglianza della connessione del conduttore, si
modificano i valori per la resistenza a freddo e la resistenza minima a caldo. Al posto del
fattore "3" si deve impiegare il fattore "4".
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
45
Componenti del motore integrato e opzioni
3.2 Protezione termica del motore
Nota
I termistori PTC non presentano una curva caratteristica lineare e non sono quindi idonei per
rilevare la temperatura istantanea.
Temp–F
Il circuito di rilevamento termico consta di un sensore di temperatura (KTY 84). Nei motori
Torque con raffreddamento integrato il sensore di temperatura del tipo KTY 84 si trova tra
due avvolgimenti di fase. Nei motori Torque con camicia di raffreddamento un sensore di
temperatura del tipo KTY 84 si trova in un avvolgimento di fase.
Funzionamento:
Il KTY 84 ha una curva caratteristica progressiva quasi lineare (resistenza termica). Come gli
elementi PTC del circuito Temp–S, possiede una ridotta capacità termica e un buon contatto
con l'avvolgimento del motore.
Temp–F è previsto per il monitoraggio della temperatura.
AVVERTENZA
La valutazione di Temp–F ai fini della protezione del motore non è consentita.
La temperatura viene misurata da Temp-F solo tra due avvolgimenti di fase o in un
avvolgimento di fase. Se si verifica una sovratemperatura in un avvolgimento di fase non
sorvegliato, ciò non può essere subito visualizzato e valutato. Inoltre la caratteristica di
Temp-F presenta un comportamento ritardato che non è sufficiente per una disinserzione
rapida.
Ampiezze di corrente diverse – e le relative sollecitazioni termiche di varia entità – dei singoli
avvolgimenti di fase si verificano quando il motore è fermo o gira molto lentamente,
generando contemporaneamente una coppia.
46
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.2 Protezione termica del motore
Tabella 3- 3
Dati tecnici del termistore PTC KTY 84
Denominazione
Descrizione
Tipo
KTY 84
Campo di trasmissione
- 40 °C ... + 300 °C
Resistenza al freddo (20 °C)
circa 580 Ω
Resistenza al caldo (100 °C)
circa 1000 Ω
Collegamento
Collegare al modulo SME12x il cavo di segnale dotato di
connettore.
Impiego
Osservazione della temperatura per la determinazione del carico
massimo del motore.
Andamento della temperatura
5HVLVWHQ]D˖
,7HVW P$
7HPSHUDWXUDr&
PERICOLO
Pericolo di folgorazione
La connessione del conduttore di segnale (filo bianco e filo marrone) al modulo sensore
SMC20 non soddisfa le impostazioni predefinite dell'isolamento di protezione a norma EN
61800-5-1. I circuiti di sorveglianza termica devono essere collegati al controllo
dell'azionamento tramite il modulo SME12x
ATTENZIONE
Per il collegamento dei sensori di temperatura con estremità dei cavi libere, rispettare i
colori dei conduttori indicati nel capitolo relativo ai collegamenti.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
47
Componenti del motore integrato e opzioni
3.3 Raffreddamento
3.2.2
Valutazione dei sensori di temperatura per la protezione del motore
Temp–S
Temp–S permette di proteggere il motore in modo affidabile dai surriscaldamenti. Se Temp–
S interviene, è necessario che l'azionamento si disinserisca rapidamente al fine di evitare
un'ulteriore alimentazione di corrente dello statore da parte del convertitore (e quindi un
ulteriore carico termico). Questo carico termico è provocato dal carico di corrente (valore/i di
riferimento) richiesto dalla regolazione e può danneggiare irrimediabilmente lo statore.
La valutazione di Temp-S avviene tramite il modulo SME12x. Il PTC 130 °C serve per
emettere un messaggio di allarme. Se la temperatura continua a salire, interviene il PTC 150
°C quando viene raggiunta la sua soglia di intervento, dopodiché lo statore deve essere
disinserito immediatamente.
Temp–F
Temp–F fornisce un segnale analogico proporzionale alla temperatura e, in caso di carico di
corrente simmetrico dei tre avvolgimenti di fase, dà informazioni sulla temperatura media del
motore.
Nota
Il sensore di temperatura (Temp-F) rileva solo la temperatura dell'avvolgimento tra due fasi o
in una fase nello statore. Le fasi nel motore sincrono vengono comunque sottoposte a
carichi diversi a seconda del modo operativo, per cui nel caso peggiore le fasi che non
vengono misurate presentano temperature più elevate.
3.3
Raffreddamento
Le perdite termiche prodotte dall'avvolgimento dello statore devono essere dissipate da un
sistema di raffreddamento ad acqua. A tal fine il canale previsto per il raffreddamento deve
essere collegato dal costruttore della macchina a un circuito di un sistema di raffreddamento.
Per le curve caratteristiche dell'aumento di temperatura e del calo di pressione del liquido di
raffreddamento tra tubo di mandata e tubo di ritorno del radiatore in funzione del flusso
volumetrico, vedere il capitolo "Dati tecnici e curve caratteristiche".
In determinati stati operativi, ad es. in presenza di numeri di giri elevati e nel funzionamento
di S1, è prevedibile che si verifichi un riscaldamento supplementare del rotore per le perdite
nel ferro. Le coppie nominali del motore indicate nei fogli dati (vedere capitolo "Dati tecnici e
curve caratteristiche") valgono per il funzionamento con raffreddamento ad acqua con una
temperatura di mandata di 35 °C e una temperatura delle flange del rotore di max. 60 °C.
Per rispettare queste condizioni, può essere necessario prendere provvedimenti aggiuntivi
per la dissipazione del calore del rotore.
48
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.3 Raffreddamento
ATTENZIONE
Se tramite la flangia non è possibile garantire in misura sufficiente la dissipazione del
calore del rotore, nel funzionamento S1 può verificarsi il surriscaldamento del rotore ad alte
velocità. Questa condizione può provocare la smagnetizzazione dei magneti.
Nota
La temperatura media nello statore e nel rotore può raggiungere 120 °C a seconda del
carico e del modo operativo. Condizioni di temperatura diverse nello statore e nel rotore
provocano tensioni elevate dei componenti del motore. Dal punto di vista costruttivo occorre
tenere conto dell'apporto di calore nella struttura meccanica e della dilatazione termica
radiale e assiale del motore.
Conseguenze in caso di mancato utilizzo del raffreddamento ad acqua
Se non si utilizza il raffreddamento ad acqua, il motore nel funzionamento continuo può
essere sottoposto solo a una coppia continuativa significativamente ridotta (M << MN) (a
seconda di dimensioni, potenza dissipata, superficie di radiazione, convezione e condizioni
di montaggio nella macchina). Può essere sfruttata la coppia massima del motore MMAX.
AVVERTENZA
Senza raffreddamento ad acqua:
Riduzione considerevole della coppia continuativa (a seconda del collegamento termico
alla struttura esterna) e forte riscaldamento della struttura della macchina.
Prevedere quindi l'impiego del raffreddamento ad acqua.
Per gli assi che devono funzionare senza raffreddamento ad acqua, nella progettazione
dell'azionamento e nella costruzione occorre tenere conto della riduzione della coppia
continuativa del motore e della deformazione termoelastica della struttura meccanica
(distorsione per dilatazione).
Nota
I motori con raffreddamento integrato non devono funzionare senza raffreddamento ad
acqua.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
49
Componenti del motore integrato e opzioni
3.3 Raffreddamento
3.3.1
Circuiti di raffreddamento
Requisiti dei circuiti di raffreddamento
Si raccomanda di eseguire i circuiti di raffreddamento come sistemi chiusi per evitare la
formazione di alghe. La pressione massima consentita è 10 bar.
Nota
Si sconsiglia di usare i circuiti di raffreddamento delle macchine per il raffreddamento dei
motori: imbrattamenti e depositi possono provocare ostruzioni! Ciò vale in particolare per i
circuiti di liquido lubrificante e refrigerante.
Se i circuiti di raffreddamento delle macchine vengono utilizzati anche per il raffreddamento
dei motori, questi devono soddisfare tutti i requisiti qui riportati. Prestare anche attenzione ai
requisiti del refrigerante e al tempo massimo di inattività dei circuiti di raffreddamento
secondo le indicazioni del produttore del refrigerante.
Materiali usati nei circuiti di raffreddamento dei motori Torque
Tabella 3- 4
Materiali usati nei circuiti di raffreddamento dei motori Torque (escluso il materiale dei raccordi)
Camicia di raffreddamento
Raffreddamento integrato
(radiatore principale) per
per
1FW609, 1FW613 e 1FW615 1FW616 ... 1FW629
1FW609, 1FW613:
EN AW-5083
(EN 573-3)
Guarnizione Viton®
(FPM)
1FW615:
S355J2G3
(EN 10025)
Guarnizione Viton®
(FPM)
X6CrNiTi18-10
(EN 10088)
SF-Cu
(DIN 17671)
CW617N
(DIN EN 12165)
Guarnizione Viton®
(FPM)
Tubo flessibile in silicone
Ag 102
(EN 1045) +
liquido EN 1045-FH10
Raffreddamento integrato
(radiatore di precisione) per
1FW616 ... 1FW629
X6CrNiTi18-10
(EN 10088)
SF-Cu
(DIN 17671)
CW617N
(DIN EN 12165)
Guarnizione Viton®
(FPM)
Tubo flessibile in silicone
Adattatore del sistema di
raffreddamento per
1FW616 ... 1FW629
CW617N
(DIN EN 12165)
Guarnizione Viton®
(FPM)
Calcolo della potenza termica dissipabile dal radiatore
Densità media del liquido di raffreddamento:
ρ
in
kg/m3
Capacità termica specifica media del liquido di
raffreddamento:
cp
in
J/(kg K)
Aumento di temperatura rispetto alla temperatura di
mandata:
ΔT
in
K
in
m3/s
Flusso volumetrico:
50
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.3 Raffreddamento
Temperatura in ingresso del liquido di raffreddamento
Le temperature di mandata devono essere scelte in modo che non si formi alcuna condensa
sulla superficie del motore: La condensa può provocare corrosione nella macchina.
Tkühl ≥ TUmgeb - 2 K
&RUUHQWHSHUPDQHQWHGHOPRWRUHSHUFHQWXDOH
LQYRQ,1
I motori sono dimensionati secondo DIN EN 60034–1 per il funzionamento con una
temperatura del liquido di raffreddamento (valore nominale della temperatura d'ingresso del
liquido di raffreddamento) di 35 °C. Con altre temperature di mandata la corrente
permanente del motore varia come illustrato nella figura seguente.
,QIOXVVRGHOODWHPSHUDWXUDGLPDQGDWDGHOOLTXLGRGL
UDIIUHGGDPHQWR
7HPSHUDWXUDGLPDQGDWDGHOUDGLDWRUHSULQFLSDOHLQr&
Figura 3-3
Dipendenza di principio della corrente permanente del motore dalla temperatura di
mandata del raffreddamento dell'acqua nel radiatore principale ignorando le perdite di
rotore
Dispositivi di raffreddamento
Per garantire una temperatura in ingresso del liquido refrigerante di 35 °C occorre utilizzare
un gruppo di raffreddamento. Il funzionamento di più motori collegati ad un unico gruppo di
raffreddamento è ammesso. I dispositivi di raffreddamento non sono compresi nella
fornitura.
La potenza refrigerante si ottiene sommando le potenze dissipate dei motori collegati. La
potenza delle pompe deve essere adattata alla portata specificata e alla perdita di pressione
del circuito di raffreddamento.
Per i nomi e gli indirizzi dei fornitori di dispositivi di raffreddamento consultare l'appendice.
Dimensionamento del sistema di raffreddamento
La potenza dissipata che si genera nel motore in caso di funzionamento continuo provoca un
flusso di calore. Questo flusso di calore viene assorbito prevalentemente dal liquido di
raffreddamento del sistema di raffreddamento e in misura minore dalla struttura meccanica.
La potenza refrigerante dell'impianto di raffreddamento di ritorno nel sistema di
raffreddamento deve essere tale da assorbire almeno 85 - 90 % della potenza dissipata. In
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
51
Componenti del motore integrato e opzioni
3.3 Raffreddamento
caso di più motori funzionanti contemporaneamente con un solo sistema di raffreddamento
questo vale per la somma delle singole potenze dissipate.
Nel funzionamento continuo il motore può essere sottoposto a carico nella misura in cui la
coppia continua effettiva Meff non supera il valore della coppia nominale MN. Di conseguenza
anche la potenza dissipata effettiva può raggiungere al massimo solo il valore della potenza
dissipata nominale PV,N.
⎜
0HII
⎟
Se il valore delle perdite effettive non è prevedibile oppure se il calcolo sembra troppo
dispendioso, in alternativa è possibile utilizzare per la potenza refrigerante di ritorno
necessaria la somma delle potenze dissipate continuative (valori della tabella) di tutti i motori
impiegati.
In questo caso lo scostamento che si verifica rispetto alla potenza dissipata effettiva può
provocare un sovradimensionamento dell'impianto di raffreddamento.
L'impianto di raffreddamento deve essere sufficientemente potente per fornire la pressione
necessaria del liquido di raffreddamento anche in caso di flusso volumetrico massimo.
3.3.2
Liquidi di raffreddamento
Fornitura del liquido di raffreddamento
Il liquido di raffreddamento deve essere messo a disposizione dal cliente. Come refrigerante
deve essere esclusivamente utilizzata acqua addizionata di anticorrosivo.
AVVERTENZA
L'uso dell'olio come liquido di raffreddamento non è ammesso poiché, a causa
dell'incompatibilità dei materiali, può provocare nei motori con camicia di raffreddamento la
decomposizione degli O-ring e nei motori con raffreddamento integrato la decomposizione
dei tubi flessibili del sistema di raffreddamento all'interno del motore.
Motivo per l'impiego di acqua con anticorrosivo
Se si utilizza acqua non trattata, i depositi di calcare, le formazioni di alghe e mucillagini e la
corrosione possono provocare danni e guasti considerevoli, come ad esempio:
● peggioramento del passaggio di calore
● aumento delle perdite di pressione a causa di restringimenti delle sezioni
● ostruzioni di ugelli, valvole, scambiatori di calore e canali di raffreddamento
Per questo motivo l'acqua usata come liquido di raffreddamento deve contenere un
anticorrosivo che impedisce la formazione di depositi e corrosione anche in condizioni
estreme.
52
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Componenti del motore integrato e opzioni
3.3 Raffreddamento
Requisiti generali del liquido refrigerante
Il liquido refrigerante deve essere pulito o filtrato per evitare che il circuito di raffreddamento
si ostruisca. La formazione di ghiaccio non è consentita.
Nota
Le dimensioni massime consentite delle particelle contenute nel liquido di raffreddamento
sono di 100 μm.
Requisiti dell'acqua
L'acqua utilizzata come base del liquido di raffreddamento deve soddisfare perlomeno i
seguenti requisiti:
● Concentrazione di cloruro: c < 100 mg/l
● Concentrazione di solfato: c < 100 mg/l
● 6,5 ≤ valore ph ≤ 9,5
Ulteriori requisiti vanno concordati con il produttore dell'anticorrosivo.
Requisiti dell'anticorrosivo
L'anticorrosivo deve soddisfare i seguenti requisiti:
● La base è etilenglicolo (detto anche "etandiolo").
● L'acqua e l'anticorrosivo non si separano.
● Il punto di congelamento dell'acqua utilizzata viene abbassato almeno a -5 °C.
● L'anticorrosivo utilizzato deve essere compatibile con le raccorderie e i tubi flessibili
impiegati nel sistema di raffreddamento e con i materiali del radiatore del motore.
Concordare questi requisiti, in particolare la compatibilità tra i materiali, con il costruttore del
sistema di raffreddamento e con il produttore dell'anticorrosivo!
Miscela ideale
● 25 % - 30 % etilenglicolo (= etandiolo)
● La componente di acqua contiene al massimo 2 g/l di sali minerali in soluzione ed è
praticamente priva di nitriti e fosfati
Per le raccomandazioni dei costruttori vedere l'appendice.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
53
Motori accoppiati
4.1
4
Funzionamento in parallelo di più motori
Funzionamento in parallelo di più motori su un asse
In determinate condizioni, i motori Torque integrati possono funzionare in parallelo su un
asse ed essere alimentati da un modulo di potenza comune. Per i disegni vedere la fine di
questo capitolo.
Nota
Possono essere collegati in parallelo solo motori Torque identici per dimensioni costruttive e
fabbisogno di corrente (stessa esecuzione dell'avvolgimento). I codici di ordinazione (MLFB)
dei motori devono differenziarsi solo nei valori "Componente (posizione dell'interfaccia)" e
"Tipo di collegamento". La direzione delle uscite dei cavi e la lunghezza dei cavi non sono
significative ai fini del collegamento in parallelo. Per una migliore comprensione, qui è
rappresentata una struttura di MLFB, nella quale i quadratini indicano i valori che possono
essere modificati; i valori rappresentati da una "x" devono invece coincidere:
1FW6xxx-x□xxx-xx□x
Per quesiti inerenti alla progettazione e al dimensionamento ottimali di sistemi di
azionamento con motori Torque nel funzionamento in parallelo, rivolgersi ai rappresentanti
della filiale Siemens più vicina.
Per il funzionamento in parallelo di più motori con un solo modulo di potenza vanno
osservate le prescrizioni specifiche del Paese. In particolare in Nordamerica devono essere
presi specifici provvedimenti (protezione motore speciale).
Requisiti
Per il funzionamento in parallelo di motori su un asse occorre tenere presente quanto segue:
● Solo i tipi di motore identici sono idonei al funzionamento in parallelo.
● Le posizioni delle fasi della FEM dei motori paralleli devono essere identiche e l'angolo di
commutazione deve essere impostato con precisione.
● Le marcature (tacche e/o fori) sullo statore/rotore del motore devono essere allineate. La
posizione reciproca dei motori può essere scelta liberamente.
A tal fine il costruttore della macchina deve predisporre nella struttura esterna una taratura
meccanica della posizione angolare (ad es. mediante una flangia intermedia con asole) su
uno statore o su un rotore. Per l'impostazione ottimale della posizione reciproca delle fasi dei
motori collegati in parallelo deve essere previsto meccanicamente un angolo di regolazione
di +/-0,5°.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
55
Motori accoppiati
4.1 Funzionamento in parallelo di più motori
CAUTELA
In caso di carico nominale nel funzionamento continuo, errori di regolazione della posizione
angolare possono provocare un sovraccarico termico su uno dei due motori paralleli.
Può essere pertanto necessario ridurre la coppia in funzione del carico al fine di evitare la
disinserzione da parte dei PTC.
In linea generale non è possibile fare a meno della regolazione fine meccanica.
Disposizioni dei motori
Le possibili disposizioni dei motori nel funzionamento in parallelo sono le seguenti:
Disposizione a tandem:
o
Le uscite cavi dei motori si trovano sullo stesso lato. Se si impiegano motori standard,
entrambi i motori hanno lo stesso senso di rotazione.
Disposizione bifronte:
Le uscite cavi dei motori si trovano su lati opposti. Se si utilizzano motori standard, lo stoker
(come descritto di seguito) deve essere collegato ai morsetti in modo che i due motori girino
nella stessa direzione.
Master e stoker
Il termine "stoker" indica il secondo motore in un asse che non ha lo stesso senso di
rotazione del primo motore ("master") per quanto riguarda le fasi U V W. Affinché lo stoker
abbia lo stesso senso di rotazione, occorre invertire le fasi V e W quando lo si collega ai
morsetti.
4.1.1
Collegamento della potenza nel funzionamento in parallelo
Tabella 4- 1
56
Collegamento di potenza nel funzionamento in parallelo di due motori Torque
Convertitore
Master
Stoker
Disposizione a tandem
Stoker
Disposizione bifronte
U2
U
U
U
V2
V
V
W
W2
W
W
V
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
/DWRGLFRQQHVVLRQHGHOPRGXORGLSRWHQ]D
6,1$0,&6
*DUDQWLUHXQDSURWH]LRQHFRQWURLFRQWDWWL
&ROOHJDPHQWR
ELDQFR
PDUURQH
YHUGH
JE
JULJLR
URVD
&RORUH
Figura 4-1
ELDQFR
PDUURQH
URVD
JULJLR
JE
6WRNHU
YHUGH
ELDQFR
PDUURQH
URVD
JULJLR
JE
0DVWHU
YHUGH
0RUVHWWLHUD
RSLDVWUDGLVFKHUPDWX
)LOLGHOFRQQHWWRUHGLVHJQDOH
Motori accoppiati
4.1 Funzionamento in parallelo di più motori
Schema di collegamento di due motori Torque collegati in parallelo (disposizione a
tandem) con connessione di PTC 130 °C e PTC 150 °C tramite SME12x
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
57
Motori accoppiati
4.1 Funzionamento in parallelo di più motori
PERICOLO
Pericolo di folgorazione!
I conduttori di segnale devono essere isolati. L'isolamento deve supportare la tensione
nominale del motore.
Nota
In caso di collegamento in parallelo di motori Torque, i cavi di potenza devono essere di
uguale lunghezza allo scopo di ottenere una distribuzione uniforme della corrente.
58
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Motori accoppiati
4.1 Funzionamento in parallelo di più motori
3XQWDDXWRFHQWUDQWH
0$67(5
6WDWRUH
5RWRUH
%ORFFRGL
FRQQHVVLRQH
%ORFFRGL
FRQQHVVLRQH
6WDWRUH
5RWRUH
3XQWDDXWRFHQWUDQWH
Disposizione bifronte
672.(5
4.1.2
Figura 4-2
Disposizione bifronte nei motori con camicia di raffreddamento
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
59
Figura 4-3
60
3XQWDDXWRFHQWUDQWH
%ORFFRGL
FRQQHVVLRQH
,QWDJOLR
%ORFFRGL
FRQQHVVLRQH
,QWDJOLR
6WDWRUH
3LDVWUDGLDOODFFLDPHQWR
SHUUHIULJHUDQWH
3XQWDDXWRFHQWUDQWH
5RWRUH
0$67(5
%ORFFRGL
FRQQHVVLRQH
3XQWDDXWRFHQWUDQWH
3XQWDDXWRFHQWUDQWH
,QWDJOLR
5RWRUH
3LDVWUDGLDOODFFLDPHQWRSHUUHIULJHUDQWH
672.(5
,QWDJOLR
%ORFFRGL
FRQQHVVLRQH
6WDWRUH
Motori accoppiati
4.1 Funzionamento in parallelo di più motori
Disposizione bifronte nei motori con raffreddamento integrato
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.1
5
Procedura
Requisiti
La scelta di un motore Torque adatto dipende da diversi fattori:
● la coppia di picco e la coppia continuativa richieste dall'applicazione
● il numero di giri e l'accelerazione angolare desiderati
● le dimensioni del vano di montaggio
● il tipo di azionamento desiderato o possibile
(funzionamento singolo o in parallelo)
● il tipo di raffreddamento richiesto.
Sequenza
In genere la scelta di un motore è un procedimento iterativo, poiché negli azionamenti diretti
altamente dinamici il tipo di motore stesso determina la coppia necessaria attraverso la
propria inerzia.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
61
Progettazione del motore
5.1 Procedura
6WDUW
'HILQL]LRQHGHOOHFRQGL]LRQLPDUJLQDOL
ವ0RPHQWLG
LQHU]LDGHOOHPDVVHURWDQWL
ವ&RSSLHG
DWWULWR
ವ0RPHQWLJUDYLWD]LRQDOL
ವ&RSSLHGLODYRUD]LRQH
ವ7LSRGLD]LRQDPHQWRPRWRUHVLQJRORGLVSRVL]LRQHDWDQGHPRELIURQWH
LPSRVWDUHLOFLFORGLFDULFR
ವ'LDJUDPPDYHORFLW¢WHPSRRSSXUH
ವ9HORFLW¢PDVVLPDHPDVVLPDDFFHOHUD]LRQHDQJRODUH
ವ'LDJUDPPDFRSSLDGLODYRUD]LRQHWHPSR
&DOFRODUHLOGLDJUDPPDFRSSLDPRWRUHWHPSR
ವ'HWHUPLQDUHODFRSSLDGLSLFFRQHFHVVDULD
ವ'HWHUPLQDUHODFRSSLDFRQWLQXDWLYDQHFHVVDULD
ವ'HWHUPLQDUHODFRSSLDGDIHUPRQHFHVVDULD
6HOH]LRQDUHLPRWRULLGRQHL
ವLQEDVHDOODFRSSLDGLSLFFR
ವLQEDVHDOODFRSSLDFRQWLQXDWLYD
ವLQEDVHDOODFRSSLDGDIHUPR
1XPHURGLJLULPD[
LPSRVWDWRPDJJLRUHGHO
QXPHURGLJLULPD[DOOD
FRSSLDGLSLFFR"
12
12
6
,OPRPHQWR
G
LQHU]LDGHOPRWRUH
VRGGLVIDODFRQGL]LRQL
PDUJLQDOL"
6
,OGLDJUDPPD0Q
GHOPRWRUHVRGGLVID
LUHTXLVLWL"
12
0RGLILFDUHODVFHOWDGHOPRWRUH
ವPRWRUHSL»JUDQGHRSSXUH
ವPRWRUHFRQXQGLYHUVRDYYROJLPHQWR
6
6HOH]LRQDUHLFRPSRQHQWLGHOVLVWHPDGL
D]LRQDPHQWRSHUO
DWWDFFRGLSRWHQ]D
ವLQEDVHDOODFRUUHQWHGLSLFFRGHOPRWRUH
ವLQEDVHDOODFRUUHQWHSHUPDQHQWHGHOPRWRUH
&DOFRODUHODSRWHQ]DGLDOLPHQWD]LRQHHOHWWULFD
ವ'DWLGHOPRWRUH
ವ'LDJUDPPDFRSSLDPRWRUHWHPSR
)LQH
62
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.1 Procedura
5.1.1
Condizioni marginali meccaniche
Momento d'inerzia
L'energia cinetica di un corpo in rotazione è direttamente proporzionale al suo momento di
inerzia J in kgm2. Il momento di inerzia considera la massa in rotazione e la sua distribuzione
spaziale su tutto il volume del corpo rispetto all'asse rotante. La massa in rotazione è
costituita dalla massa della struttura meccanica da far ruotare (ad es. l'utensile e il supporto)
e dalla massa propria del rotore.
Coppia d'attrito
La coppia d'attrito Mr è opposta al senso di rotazione del rotore. Grosso modo si può ritenere
che sia costituita da una "componente di attrito statico" costante MRH e una "componente di
attrito radente" proporzionale al numero di giri MRG. Entrambe le componenti dipendono
inoltre dai cuscinetti utilizzati e dal carico relativo.
Per carico si intendono, a seconda della versione della struttura meccanica, soprattutto le
forze assiali e le forze di serraggio tra i singoli cuscinetti.
Procedura ulteriore
Inizialmente si può utilizzare il momento di inerzia di un tipo di motore ritenuto adeguato.
Qualora durante il calcolo dovesse poi risultare uno scostamento troppo ampio tra il
momento di inerzia utilizzato inizialmente e il momento di inerzia effettivo, per la scelta del
motore sarà necessaria un'ulteriore fase di calcolo. Per il calcolo delle coppie di attrito fare
riferimento alle indicazioni fornite dal produttore dei cuscinetti.
5.1.2
Impostazione del ciclo di carico
Importanza del ciclo di carico
Oltre alla coppia d'attrito, ai fini della scelta del motore è determinante il ciclo di carico. Il
ciclo di carico contiene indicazioni sulla sequenza di movimento dell'asse di azionamento e
sulle relative fasi di lavorazione.
Sequenza di movimento
La sequenza di movimento può essere descritta sotto forma di diagramma angolo di
rotazione/tempo, di diagramma velocità angolare/tempo, di diagramma numero di giri/tempo
o di diagramma accelerazione angolare/tempo. Le coppie risultanti dalla sequenza di
movimento (coppia di accelerazione Ma) sono proporzionali all'accelerazione angolare α e al
momento di inerzia J e sono opposte all'accelerazione.
I diagrammi angolo/tempo e i diagrammi numero di giri/tempo possono essere convertiti in
diagrammi accelerazione angolare/tempo α (t) secondo le seguenti formule.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
63
Progettazione del motore
5.1 Procedura
Esempio
Figura 5-1
5.1.3
Esempio di ciclo di carico con diagramma numero di giri/tempo n(t), diagramma
derivante di accelerazione angolare/tempo α(t) e diagramma fase di lavorazione/tempo
Mb(t).
Diagramma coppia/tempo
Coppia motore necessaria
La coppia motore necessaria Mm è in ogni momento la somma delle singole coppie. Per il
calcolo occorre rispettare il segno corretto delle coppie.
Mm = Ma + Mb + Mr
Ma : Coppia di accelerazione
Mb: Momento di lavorazione
Mr: Coppia d'attrito
64
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.1 Procedura
Determinazione della coppia motore necessaria
L'andamento temporale delle coppie di attrito può essere calcolato sulla base
dell'andamento del numero di giri. La formula sommatoria permette quindi di ottenere il
diagramma coppia motore/tempo (vedere la figura che segue), dal quale può essere ricavata
direttamente la coppia di picco richiesta MmMAX.
0U
W
0E
W
0D
W
0P0$;
0P W
Figura 5-2
Andamento temporale delle singole coppie e coppia motore risultante Mm richiesta per un azionamento
Torque
Oltre alla coppia di picco MmMAX per il dimensionamento del motore è determinante la coppia
continuativa richiesta Meff. La coppia continuativa Meff richiesta per il riscaldamento del
motore può essere ricavata dal diagramma coppia motore/tempo calcolando il valore
quadratico medio; questo valore non deve superare la coppia nominale MN.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
65
Progettazione del motore
5.1 Procedura
0HII
Qualora le singole coppie siano costanti durante ogni fase, l'integrale viene semplificato in
una semplice formula sommatoria (vedere anche la figura che segue).
0HII
0HII
Figura 5-3
5.1.4
Diagramma coppia motore/tempo
Scelta dei motori
Sulla base dei valori ottenuti per la coppia di picco MmMAX e per la coppia continuativa Meff è
possibile scegliere un motore Torque adeguato.
Fattori da tenere in considerazione per la selezione del motore
● Per la coppia massima MMAX, il motore deve possedere una riserva di regolazione pari a
circa il 10% del valore MmMAX necessario, per evitare effetti limitanti indesiderati in caso di
sovraelongazione dei circuiti di regolazione.
● La coppia nominale MN del motore deve essere almeno pari al valore calcolato della
coppia continuativa Meff del ciclo di carico.
● Se non sono note alcune condizioni marginali come il momento di lavorazione e la coppia
di attrito, è consigliabile pianificare un riserve di maggiore entità.
● Oltre ai requisiti relativi al ciclo di carico, la scelta del motore può essere influenzata dalle
condizioni meccaniche per il montaggio. In parecchi casi, utilizzando un motore più lungo
con diametro più ridotto è possibile ottenere le stesse coppie motore che si ottengono
con un motore più corto e con diametro maggiore.
● Se la coppia dell'asse è fornita da più motori Torque, devono essere sommati i valori
della coppia di picco e della coppia continuativa dei singoli motori.
66
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.1 Procedura
5.1.5
Carico di corrente non uniforme
Con carichi costanti non uniformi, il motore deve essere azionato al massimo con il 70 %
della coppia nominale; vedere anche M0* nel capitolo "Dati tecnici".
Per indicazioni precise, rivolgersi alla filiale Siemens di competenza.
ATTENZIONE
Le tre fasi non non ricevono lo stesso carico di corrente in tutte le modalità operative!
Esempi di ripartizione non uniforme del carico di corrente:
Condizione di fermo con invio di corrente al motore, ad esempio in caso di:
– bilanciamento di una forza peso
– avviamento a vincere un sistema di frenatura (elementi ammortizzatori e di
attenuazione degli urti)
basso numero di giri in un periodo di tempo prolungato (n << 1 [1/min])
rotazioni cicliche (distanza sul perimetro del rotore < distanza polare).
5.1.6
Diagramma coppia motore / numero di giri
Verifica delle coppie e dei numeri di giri
In caso di numero di giri elevato, la coppia motore massima disponibile è limitata dall'altezza
della tensione del circuito intermedio disponibile. Se i numeri di giri rilevati nella sequenza di
movimento sono superiori al numero di giri massimo nMAX,MMAX indicato per il tipo di motore
con la coppia massima MMAX, può essere necessaria una verifica in base al diagramma
coppia motore/numero di giri. Questo diagramma è allegato ai dati del motore.
Figura 5-4
Diagramma coppia motore / numero di giri
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
67
Progettazione del motore
5.1 Procedura
Definizione del diagramma coppia motore / numero di giri
Se il diagramma coppia motore / numero di giri non è disponibile, è possibile ricavarlo con
sufficiente precisione dai dati di coppia massima MMAX, coppia nominale MN e relativi numeri
di giri nMAX,MMAX e nMAX,MN, in base alla figura "Diagramma coppia motore / numero di giri".
Questo diagramma deve essere confrontato con il diagramma coppia motore/tempo e con il
diagramma numero di giri/tempo (vedere la figura che segue). In genere è sufficiente
individuare nel diagramma coppia/tempo i tempi critici nei quali alla coppia di picco viene
superato il numero di giri massimo nMAX,MMAX. Per questi tempi si seleziona la coppia del
motore (nell'esempio M1) dal diagramma coppia motore/tempo e si verifica che si trovi al di
sotto della curva caratteristica nel diagramma coppia motore/numero di giri.
Figura 5-5
5.1.7
Diagramma coppia motore/tempo e diagramma numero di giri/tempo corrispondente
Requisiti relativi alla coppia e al numero di giri
Rispetto dei requisiti relativi alla coppia e al numero di giri
Qualora il motore selezionato non soddisfi i requisiti relativi alla coppia e al numero di giri,
sono possibili le seguenti soluzioni:
● Sovracomando
Se per il campo del numero di giri elevato non sussistono requisiti di precisione elevata
(ad esempio avanzamento rapido senza lavorazione), può essere ammesso un
sovracomando pari al numero di giri massimo. In questo caso le tensioni di uscita del
convertitore, e di conseguenza le correnti motore, cessano di avere una forma
68
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.1 Procedura
perfettamente sinusoidale. Di conseguenza, la formazione della coppia del motore non è
più uniforme, ma presenta un'ondulazione. L'entità del sovracomando del numero di giri
massimo dipende dall'errore di ritardo di posizionamento e dall'errore di posizionamento
ammessi nel controllo e dal tipo di motore.
● Motore con avvolgimento di tipo diverso
Per alcune grandezze del motore sono disponibili più varianti di avvolgimento. In motori
della stessa grandezza e con coppia massima, gli avvolgimenti con induttanza più bassa
permettono di ottenere numeri di giri più elevati. In questo caso, lo svantaggio è una
corrente del motore più elevata.
● Tipo motore più potente
Nel caso in cui le prime due possibilità non siano realizzabili, sarà necessario utilizzare
un motore con coppia di picco più elevata, così che nel campo superiore del numero di
giri siano disponibili riserve di coppia sufficienti per la coppia M1 richiesta (vedere la figura
che segue).
0RWRUHFRQFRSSLDVXIILFLHQWH
0RWRUHFRQFRSSLDLQVXIILFLHQWH
Figura 5-6
5.1.8
Diagramma coppia motore/numero di giri con punto di funzionamento richiesto M1
Più motori Torque su un asse
Se i motori Torque funzionanti sullo stesso asse vengono utilizzati con sistemi di
azionamento separati con sistemi di misura angolare separati, la disposizione rispetto
all'angolo di rotazione dei singoli statori tra loro e dei singoli rotori tra loro è irrilevante.
Collegamento elettrico in parallelo
Se i motori vengono utilizzati sullo stesso sistema di azionamento (collegamento elettrico in
parallelo), è necessario posizionare con precisione sull'asse i singoli rotori l'uno rispetto
all'altro. Di conseguenza, occorre disporre con precisione anche i singoli statori l'uno rispetto
all'altro (vedere il capitolo "Funzionamento in parallelo di più motori").
5.1.9
Controllo dei momenti di inerzia
Dopo aver selezionato il motore adeguato, viene determinato il momento di inerzia della
massa in rotazione dell'asse. Con questo valore possono essere verificate le ipotesi relative
al ciclo di carico.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
69
Progettazione del motore
5.1 Procedura
Ricalcolo del ciclo di carico
Se i valori nominali dei momenti di inerzia utilizzati inizialmente si discostano dal momento di
inerzia effettivo, può essere necessario ricalcolare il ciclo di carico.
5.1.10
Scelta dei componenti del sistema di azionamento per il collegamento di potenza
La scelta dei componenti necessari del sistema di azionamento per il collegamento di
potenza dipende dalle correnti di picco e dalle correnti continuative che si verificano durante
il ciclo di carico. Se vengono collegati più motori in parallelo ad un solo modulo di potenza, si
deve considerare la somma dei valori delle correnti di picco e continuative.
Nota
Nei sistemi con azionamenti diretti collegati ad alimentatori regolati, si possono verificare
oscillazioni elettriche riferite al potenziale di terra. Queste oscillazioni sono determinate tra
l'altro dai seguenti fattori:
lunghezza dei cavi
dimensione dell'unità di alimentazione/recupero
numero di assi
dimensioni del motore
progettazione dell'avvolgimento del motore
tipo di rete
luogo di installazione.
Le oscillazioni provocano carichi di tensione maggiori e possono danneggiare l'isolamento
principale. Si raccomanda pertanto di utilizzare un'induttanza HFD con resistenza per lo
smorzamento delle oscillazioni. Per informazioni dettagliate, vedere le documentazioni dei
sistemi di azionamento utilizzati o rivolgersi alla filiale Siemens di competenza.
5.1.11
Calcolo della potenza di alimentazione necessaria
Potenza di alimentazione
La potenza di alimentazione elettrica dei motori può essere ricavata dalla potenza
meccanica prodotta e dalle relative perdite elettriche.
,
con
, M è la coppia del motore in Nm, ω la velocità angolare in 1/s e kT la costante di coppia del
motore in Nm/A; vedere anche il capitolo "Spiegazione dei simboli delle formule".
Il numero di giri n in 1/min può essere convertito in velocità angolare come segue:
70
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.2 Esempio(i)
Esempio di calcolo del numero di giri n = 80 1/min nella velocità angolare ω
Per la resistenza di linea RSTR (T) utilizzare il valore di temperatura nominale
dell'avvolgimento; vedere anche il capitolo "Spiegazione dei simboli delle formule".
Questa equazione può essere applicata per ogni momento del ciclo di carico.
Selezione di un alimentatore
Per la scelta dell'alimentatore del circuito intermedio negli azionamenti diretti altamente
dinamici è in genere sufficiente definire la potenza di picco dell'alimentazione che si verifica
nel ciclo di carico, poiché normalmente la potenza continuativa assorbita è decisamente
inferiore. La potenza di picco dell'alimentazione è necessaria soprattutto nel processo di
accelerazione al numero di giri massimo (vedere il punto di funzionamento M1 nella figura
"Diagramma coppia motore/numero di giri con punto di funzionamento richiesto M1").
In caso di funzionamento contemporaneo di più assi, per la scelta dell'alimentatore occorre
tenere conto, oltre alle potenze di alimentazione dei singoli assi, delle condizioni di
contemporaneità.
5.2
Esempio(i)
Nota
I dati tecnici qui indicati possono differire dai dati tecnici forniti nel capitolo "Dati tecnici". Ciò
tuttavia non influisce in alcun modo sulla procedura di progettazione.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
71
Progettazione del motore
5.2 Esempio(i)
Condizioni marginali valide per il posizionamento in un tempo dato
● Momento d'inerzia in kgm2: J = 5,1 kg m2;
massa in movimento di forma cilindrica m = 30 kg con raggio sostitutivo r = 0,583 m;
l'asse di rotazione della massa in movimento è identico a quello del motore;
calcolo con la formula
Figura 5-7
Momento di inerzia della massa in movimento di forma cilindrica e del motore Torque
● Angolo di rotazione in ° o in rad: φ = 120° = 2/3 π
● Durata del percorso in s: t1 = 0,4 s
● coppia di attrito costante in Nm: Mr = 100
Si vuole cercare:
● il motore Torque adeguato
● la velocità angolare ω in rad/s o il numero di giri n in 1/min o in giri/min
● l'accelerazione angolare α in rad/s2 o l'accelerazione in giri/s2
La forma del profilo di movimento non è prescritta, ma sono indicati l'angolo e la durata di
tempo necessaria per ricoprirlo.
Se non vengono impostati dei requisiti limitativi sull'accelerazione angolare e/o sulla velocità
angolare, il movimento adeguato più semplice è costituito esclusivamente da un movimento
di accelerazione e dal successivo movimento di decelerazione.
72
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.2 Esempio(i)
Figura 5-8
rappresentazione ideale del profilo di movimento con accelerazione angolare α (t),
velocità angolare ω (t) e angolo φ (t)
Tabella 5- 1
Funzioni relative alle singole fasi del profilo di movimento
Fase I
Fase II
αI (t) = α
αII (t) = - α
ωI (t) = α t
ωII (t) = - α t + α t1
φI (t) = ½ α t2
φII (t) = - ½ α t2 + α t1 t + φMAX
L'accelerazione angolare α (t) è costante in ogni fase. La velocità angolare ω (t) nella prima
fase aumenta in modo lineare fino al valore massimo e nella seconda fase diminuisce in
modo lineare fino alla condizione di fermo.
L'angolo di rotazione ricoperto φ (t) aumenta nella fase I e nella fase II secondo funzioni
paraboliche. Un profilo di movimento di questo genere permette i tempi di posizionamento
più brevi.
Dall'angolo finale dato φMAX e dal relativo momento t1 è possibile calcolare l'accelerazione
angolare e la decelerazione angolare costanti richieste. Fasi transitorie brevi per l'attuazione
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
73
Progettazione del motore
5.2 Esempio(i)
dell'accelerazione e della decelerazione con il relativo strappo angolare non vengono
considerate per ragioni di semplicità.
Poiché in entrambe le fasi di questo esempio le superfici sotto le curve di ω (t) sono uguali,
vale quanto segue:
LQRSSLQ
LQ
Dall'accelerazione angolare calcolata viene determinata la velocità angolare ωMAX raggiunta
nel momento t1/2:
LQ
Il numero di giri n viene calcolato con la formula n = ωMAX/2π.
Nota
1 rad corrisponde a 180°/π = 57,296 °
1 giro corrisponde a 360° o 2 π rad
Con i valori dati si ottiene:
accelerazione angolare α = 52,36 rad/s2
velocità angolare ωMAX = 10,47 rad/s
numero di giri n = 100 giri/min
Per la coppia di accelerazione richiesta vale la seguente formula:
Ma = (J + Jm) • α
Poiché il momento di inerzia Jm per il motore 1FW6 nel momento attuale della progettazione
non è ancora conosciuto, si deve inizialmente utilizzare il valore Jm = 0 kgm2.
Ma = 5,1 kgm2 • 52,36 rad/s2 = 267 Nm
Per far accelerare la massa data, è necessaria una coppia Ma di 267 Nm.
Mm = Mr + Ma
Mm = 100 Nm + 267 Nm = 367 Nm
Con coppia di attrito costante Mr si ottiene quindi una coppia motore Mm = 367 Nm.
Dalla tabella "Panoramica dei motori Torque integrati" viene selezionato il motore adeguato
secondo i seguenti criteri:
Coppia massima almeno 367 Nm.
Numero di giri massimo (dopo aver erogato la coppia massima) almeno 100 giri/min.
I motori adatti sono:
1FW6090-0PA15-2JC2 (diametro 230 mm, lunghezza 190 mm)
1FW6130-0PA05-1JC2 (diametro 310 mm, lunghezza 90 mm)
Il momento di inerzia del motore 1FW6090-0PA15-2JC2 è pari a J = 0,0465 kgm2.
La coppia di accelerazione Ma può a questo punto essere corretta in:
Ma = (5,1 kgm2 + 0,0465 kgm2) • 52,36 rad/s2 = 269 Nm
74
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.2 Esempio(i)
In questo modo la coppia motore totale necessaria Mm = Mr + Ma aumenta a 369 Nm.
Il momento di inerzia del motore 1FW6130-0PA05-1JC2 è pari a J = 0,0637 kgm2.
La coppia di accelerazione Ma può a questo punto essere corretta in:
Ma = (5,1 kgm2 + 0,0637 kgm2) • 52,36 rad/s2 = 270 Nm
In questo modo la coppia motore totale necessaria Mm = Mr + Ma aumenta a 370 Nm.
Valutazione
Entrambi i motori sono adeguati per questo compito di posizionamento. La preferenza per
uno dei due tipi viene assegnata in base ai requisiti di spazio. Durante il posizionamento il
motore sviluppa una coppia di molto superiore alla propria coppia nominale MN, e la perdita
di potenza derivante è molto più elevata della perdita di potenza continuativa ammessa. Se
la sequenza di posizionamento ha durata breve e la temperatura dell'avvolgimento in
aumento rimane al di sotto del limite di disinserzione, è ammesso il carico elevato. Vedere il
capitolo "Servizio intermittente S3".
Ciclo di carico ripetitivo periodico (funzionamento S3)
Il motore può ripetere un processo di azionamento (ad esempio, il processo di
posizionamento descritto sopra) temporaneamente con M > MN per un periodo di tempo
illimitato, se vi sono sufficienti pause lunghe con avvolgimenti senza corrente tra le fasi di
carico. Vedere anche il capitolo "Servizio intermittente S3".
La fase di carico e la fase (di raffreddamento) senza corrente sono definite come "ciclo di
carico". Le fasi di raffreddamento hanno un significato determinante: Le pause permettono di
ridurre la coppia effettiva del ciclo di carico al valore della coppia nominale MN del motore.
Se il ciclo di carico successivo non è noto o se non può essere stimato, il motore può essere
selezionato soltanto in base al numero di giri massimo e alla coppia di picco richiesti. In
questo modo per il ciclo di carico viene determinata anche la coppia continua massima
ammessa. Ne consegue una fase di raffreddamento minima possibile, la cui lunghezza non
può essere superata.
Come esempio, utilizzare un ciclo di carico estremamente semplificato di tre intervalli di
tempo di lunghezza Δt1, Δt2, Δt3. In questi intervalli di tempo vengono fornite le coppie M1,
M2, M3. Ognuna di queste coppie può avere un valore a scelta compreso tra + MMAX e –
MMAX. La coppia effettiva Meff di questo ciclo di carico può essere calcolata in Nm secondo la
seguente formula:
0HII
La durata del ciclo (Δt1 + Δt2 + Δt3) non deve superare il 10 % della costante termica tTH.
Il ciclo di carico è ammesso se Meff ≤ MN.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
75
Progettazione del motore
5.3 Servizio di breve durata S2 e servizio intermittente S3
5.3
Servizio di breve durata S2 e servizio intermittente S3
Servizio di breve durata S2
Nel servizio di breve durata S2 il tempo di carico è così breve che lo stato termico finale non
viene raggiunto. La pausa conclusiva senza corrente è così lunga che il motore in pratica si
raffredda completamente.
CAUTELA
Un carico troppo elevato può danneggiare irrimediabilmente il motore.
Il carico non deve superare il valore IMAX definito nei fogli dati.
Il motore deve funzionare solo per un breve periodo di tempo t < tMAX con una corrente
IN < IM ≤ IMAX. Il tempo tMAX può essere calcolato con la formula logaritmica
Y
W0$; W7+yOQ Y
con ν = (IM / IN)2 e la costante di tempo termica tTH.
Per le costanti di tempo termiche, le correnti massime e le correnti nominali dei motori,
vedere i fogli dati.
Nota
L'equazione precedente è valida a condizione che la temperatura iniziale del motore sia pari
alla temperatura di mandata del raffreddamento ad acqua TVORL in conformità con il foglio
dati.
Esempio
Un motore 1FW6190-xxx15-2Jxx deve essere fatto funzionare da freddo con la corrente
massima.
● IMAX = 47 A, IN = 26 A; da ciò si ricava ν = 3,268
● tTH = 180 s
Il motore può funzionare al massimo per 66 s con la corrente massima.
76
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Progettazione del motore
5.3 Servizio di breve durata S2 e servizio intermittente S3
Funzionamento intermittente S3
Nel servizio intermittente S3 si alternano in successione periodica tempi di carico ΔtB con
corrente costante e tempi di inattività ΔtS senza corrente. Durante il tempo di carico il motore
si scalda, mentre nel tempo di inattività si raffredda. Dopo un numero sufficiente di cicli di
carico di durata pari a ΔtSpiel = ΔtB + ΔtS l'andamento della temperatura oscilla tra un valore
massimo costante To e un valore minimo costante Tu (vedere la figura seguente).
&RUUHQWH,
,0$;
,0
7HPSRW
7HPSHUDWXUD7
7Rื71
7X
ෙW%
ෙW6
7HPSRW
ෙW6SLHO
Figura 5-9
Andamento di corrente e temperatura nel servizio intermittente S3
Per correnti IN < IM ≤ IMAX la corrente permanente effettiva non deve superare la corrente
nominale:
,HII , y˂W% ,0
˂W6SLHO 0
˂W%
,1
˂W6SLHO
La durata del ciclo non deve superare il 10 % della costante di tempo termica tTH. Se è
necessaria una durata superiore, contattare la filiale Siemens più vicina.
Esempio
Con una costante termica di tempo tTH = 180 s si ottiene per la durata massima del ciclo
tSpiel = 0,1 · 180 s = 18 s
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
77
Montaggio del motore
6.1
6
Montaggio del motore
Avvertenze importanti sul montaggio del motore
Prima di eseguire il montaggio del motore, leggere attentamente le istruzioni di montaggio
contenute in questo capitolo.
PERICOLO
Durante il montaggio dei motori Torque si rende necessario operare in prossimità di rotori
non imballati. Ciò rende particolarmente elevati i rischi dovuti ai campi magnetici forti.
Attenersi strettamente alle istruzioni del capitolo "Avvertenze di sicurezza" e alle
avvertenze riportate nel presente capitolo.
Rimuovere gli imballaggi dei motori Torque motore solo immediatamente prima del
montaggio.
È necessario che le operazioni di montaggio vengano eseguite da almeno due addetti.
Utilizzare gli strumenti previsti per il montaggio.
Non mettere in contatto le superfici magnetiche con i metalli.
Non avvicinare alle superfici magnetiche oggetti magnetizzabili e/o magneti permanenti.
Evitare sempre di utilizzare attrezzi magnetizzabili. Se l'uso di tali attrezzi è indispensabile,
impugnarli saldamente con entrambe le mani e avvicinarli lentamente al motore Torque
integrato o al rotore.
Le operazioni di montaggio devono essere eseguite solo in assenza di tensione.
Per il montaggio di componenti singoli occorre utilizzare dispositivi particolari e attenersi a
procedure specifiche.
AVVERTENZA
I blocchi di sicurezza per il trasporto devono essere rimossi solo per l'installazione del
motore Torque nella struttura degli assi. Rispettare assolutamente la sequenza delle
operazioni descritta nel capitolo "Procedura di montaggio del motore".
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
79
Montaggio del motore
6.1 Montaggio del motore
AVVERTENZA
La struttura della macchina deve essere concepita in modo che sia il rotore sia lo statore
vengano fissati solo su un lato. A questo proposito vedere il capitolo "Esempi di
montaggio". - Se vengono fissati su entrambi i lati, la dilatazione termica può causare
tensioni elevate nei materiali della struttura della macchina. Questa condizione può
danneggiare il motore.
PERICOLO
I cavi di collegamento difettosi possono provocare una scossa elettrica e/o danni materiali,
ad es. incendi.
Verificare che, durante il montaggio, i cavi di collegamento
non vengano danneggiati
non siano sottoposti a trazione
non possano impigliarsi nelle parti in rotazione.
Rispettare i raggi di curvatura ammessi nel capitolo "Interfacce".
Il motore non deve essere afferrato o tirato per i cavi.
PERICOLO
Pericolo di folgorazione! La rotazione di un motore Torque montato provoca, in
corrispondenza dei terminali dei cavi del motore stesso, tensioni dovute ad induzione che
possono costituire un pericolo mortale.
Isolare i morsetti e i conduttori dei terminali dei cavi scoperti o evitare di far girare i motori
Torque già montati.
Inoltre sussiste il pericolo di schiacciamento.
AVVERTENZA
Gli spigoli vivi possono provocare ferite da taglio e la caduta di oggetti può provocare
lesioni ai piedi.
Indossare guanti da lavoro e calzature di sicurezza.
80
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
Forze radiali e forze assiali
)D
)U
1
Rotore con magneti permanenti
2
Statore
Fa
Forza di attrazione assiale
Fr
Forza di attrazione radiale
Figura 6-1
Forze esistenti durante l'inserimento dello statore e del rotore
Forze radiali tra statore e rotore
La seguente tabella mostra la forza radiale in N esistente tra lo statore e il rotore con un
errore di centratura pari a 0,1 mm. Più la parte attiva è lunga, più la forza radiale è elevata.
Tabella 6- 1
Forze radiali in N/0,1 mm con errori di centratura radiali durante il montaggio
Lunghezza
della parte
attiva
150 mm
Lunghezza
della parte
attiva
200 mm
-
710
-
-
1070
-
660
-
990
-
410
590
-
880
1180
490
710
-
1060
1410
420
590
840
-
1260
1680
-
600
-
940
1280
1630
Lunghezza
della parte
attiva
50 mm
Lunghezza
della parte
attiva
70 mm
Lunghezza
della parte
attiva
100 mm
Lunghezza
della parte
attiva
110 mm
1FW609
240
330
470
1FW613
360
500
710
1FW615
330
460
1FW616
290
1FW619
350
1FW623
1FW629
Nota
Rispettare assolutamente le forze radiali esistenti tra lo statore e il rotore e l'errore di
concentricità massimo ammesso indicato nei disegni quotati.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
81
Montaggio del motore
6.1 Montaggio del motore
Esempio
In un motore Torque 1FW6090-0Px010-xxxx (lunghezza della parte attiva 100 mm)
l'eccentricità è pari, ad es. 0,2 mm.
La forza radiale dovuta a questo errore di centratura è pari quindi a
1
PP
1
PP
Forze assiali tra statore e rotore
Tabella 6- 2
Forze assiali in N tra lo statore e il rotore durante l'installazione
Forze assiali in
N
1FW609
1FW613
1FW615
1FW616
1FW619
1FW623
1FW629
80
120
150
210
250
300
450
ATTENZIONE
Le forze di attrazione esistenti tra lo statore e il rotore sono 4 o 5 volte più elevate quando il
rotore sta per penetrare nello statore.
Requisiti del dispositivo di assemblaggio
Il dispositivo di assemblaggio deve garantire l'inserimento controllato e centrato dello statore
e del rotore durante l'intero processo di installazione. Durante il processo di installazione
occorre tenere presenti le forze assiali esistenti.
Il dispositivo di assemblaggio deve essere adattato dal cliente in funzione della struttura
della macchina. Deve essere caratterizzato da una sufficiente rigidità, poiché non deve
deformarsi sotto l'effetto delle elevate forze di attrazione che agiscono tra lo statore e il
rotore. In fase di dimensionamento del dispositivo di assemblaggio vanno considerate le
forze radiali esistenti.
Il dispositivo di assemblaggio non deve avere gioco.
AVVERTENZA
Durante il processo di centratura e di inserimento, lo statore e il rotore non devono in alcun
modo entrare in contatto tra di loro.
Non è possibile separare lo statore e il rotore. Se ciò avviene, il motore non può più essere
utilizzato. È pertanto necessario inserire un dispositivo di assemblaggio come supporto per
il montaggio.
82
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
Tecnica di fissaggio
Per il fissaggio del motore Torque occorre tenere presente quanto segue:
● Utilizzare esclusivamente viti di fissaggio nuove (mai utilizzate).
● Le superfici di fissaggio devono essere prive di olio e grasso.
● Rispettare la profondità massima di avvitamento ammessa per le viti di fissaggio nello
statore e nel rotore (fare riferimento al disegno di montaggio corrispondente).
● Profondità minima di avvitamento per le viti di fissaggio nello statore:
1,3 x d (vale per i motori 1FW609 ... 1FW613);
1,0 x d (vale per i motori 1FW615 e di dimensioni maggiori).
● Profondità minima di avvitamento per le viti di fissaggio nella flangia del rotore: 1,0 x d
(per l'acciaio).
● Per fissare le viti scegliere una lunghezza di serraggio cospicua lk, possibilmente lk/d > 5;
in alternativa (se lk/d > 5 non è possibile) verificare a intervalli regolari il precarico delle
viti (ossia serrare con chiave dinamometrica calibrata).
● Rispettare le coppie di serraggio indicate nella seguente tabella:
● Serrare le viti tenendo conto dell'angolo di rotazione, ma almeno con chiave
dinamometrica calibrata e bussola possibilmente corta, procedendo per coppie di viti
opposte di 180°.
● Serrare nuovamente tutte le viti per ridurre al minimo i possibili allentamenti
● Non utilizzare frenafiletti liquidi
Spiegazioni:
Ik = lunghezza di serraggio in mm
d = diametro nominale della vite in mm (ad es. vite M8: d = 8 mm)
Bulloneria e coppie di serraggio
Per fissare il motore alla struttura della macchina è necessario utilizzare viti di varie classi di
resistenza. Nella tabella che segue sono indicate le classi di resistenza e le coppie di
serraggio richieste per lo statore e per il rotore.
Tabella 6- 3
Classi di resistenza e coppie di serraggio richieste per lo statore e per il rotore
Serie costruttiva
1FW6090-xxB05-xxxx ...
Vite
(classe di resistenza)
Coppia di serraggio
MA in Nm
M5 (8.8)
4,5
M5 (8.8)
5,2
M6 (8.8)
9
1FW6090-xxB15-xxxx
1FW6130-xxB05-xxxx ...
1FW6130-xxB15-xxxx
1FW6150-xxB05-xxxx ...
1FW6150-xxB15-xxxx
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
83
Montaggio del motore
6.1 Montaggio del motore
Serie costruttiva
Vite
(classe di resistenza)
Coppia di serraggio
MA in Nm
M8 (8.8)
21,6
1FW6160-xxB20-xxxx
M8 (10.9)
31,8
1FW6190-xxB05-xxxx ...
M8 (8.8)
21,6
1FW6190-xxB20-xxxx
M8 (10.9)
31,8
1FW6230-xxB05-xxxx ...
M8 (8.8)
21,6
1FW6230-xxB20-xxxx
M8 (10.9)
31,8
1FW6290-xxB07-xxxx ...
M10 (8.8)
43
M10 (10.9)
61,8
1FW6160-xxB05-xxxx ...
1FW6160-xxB15-xxxx
1FW6190-xxB15-xxxx
1FW6230-xxB15-xxxx
1FW6290-xxB15-xxxx
1FW6290-xxB20-xxxx
Nota
Valore di attrito utilizzato µges = 0,1
Per valori di attrito diversi è necessario ridurre le coppie di serraggio.
Tenere anche conto delle coppie di serraggio massime per le viti utilizzate. Queste possono
essere inferiori ai valori indicati nella tabella precedente.
6.1.1
Procedura di montaggio del motore
Sequenza delle operazioni di montaggio del motore
PERICOLO
Una sequenza di montaggio diversa da quella descritta può comportare lesioni alle persone
e/o danni irreversibili del motore.
84
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
1. Preparare e pulire le superfici di montaggio delle parti del motore e della macchina.
– Sbavare e arrotondare i fori interni (ad esempio per l'ingresso e l'uscita del liquido di
raffreddamento) della
carcassa della macchina.
– Rimuovere eventuali residui di lavorazione, quali trucioli, polvere e corpi estranei.
– Ingrassare o lubrificare i componenti.
– Per i motori con camicia di raffreddamento:
ingrassare gli O-ring e i componenti. Durante quest'operazione, tenere presente la
compatibilità del prodotto utilizzato con il materiale degli O-ring (fluorocaucciù, nome
commerciale Viton®). Non utilizzare lubrificanti che contengono additivi con molecole
solide, ad es. disolfuro di molibdeno o solfuro di zinco.
2. Le operazioni qui descritte valgono solo per i motori con camicia di raffreddamento:
inserire i due O–ring nelle gole previste lungo la superficie della camicia di
raffreddamento del motore.
– Non tendere eccessivamente gli O-ring (durante il montaggio, tendere gli O-ring fino al
10 % al massimo, per evitare difficoltà durante il montaggio e problemi di tenuta).
– Non torcere gli O-ring.
– Non utilizzare oggetti affilati o appuntiti.
– Servirsi di uno strumento di supporto per effettuare il posizionamento corretto.
– Se possibile, utilizzare le guide di montaggio.
3. Isolare, se necessario, gli allacciamenti di potenza (per evitare danni derivanti da
tensione indotta e ondulazione in caso di cortocircuito di fase durante il funzionamento).
4. Alla consegna, lo statore e il rotore sono montati con i blocchi di sicurezza sulla flangia B
(lato con uscita del cavo).
Se questo è il lato previsto per il fissaggio, rimuovere i blocchi di sicurezza.
Se il lato previsto per il fissaggio è il lato A (lato senza uscita del cavo), allentare i blocchi
di sicurezza sulla flangia B.
Quando si rimuovono o si allentano i blocchi di sicurezza, il motore va mosso con
prudenza.
Conservare i blocchi di sicurezza rimossi, per poterli riutilizzare in caso di interventi di
manutenzione o di smontaggio.
Non centrare e inserire a mano singolarmente lo statore e il rotore.
Servirsi di un apposito dispositivo di assemblaggio. Leggere la descrizione del dispositivo
di assemblaggio contenuta nel presente capitolo.
5. Quest'operazione è necessaria solo per i motori dotati di camicia di raffreddamento:
introdurre il motore con la superficie della flangia libera nel foro di riferimento previsto a
questo scopo nella carcassa della macchina.
Durante quest'operazione occorre fare attenzione a non spingere fuori della scanalatura
e a non danneggiare gli O-ring.
Accertarsi inoltre di non montare il motore in posizione inclinata nel vano di montaggio.
Se il motore dovesse inclinarsi leggermente, è possibile risolvere il problema colpendo
delicatamente la flangia con un martelletto di gomma.
6. Avvitare la superficie della flangia dello statore alla carcassa della macchina e la
superficie della flangia del rotore sull'asse in movimento. Rispettare le coppie di serraggio
e le indicazioni relative alla tecnica di fissaggio riportate in questo capitolo.
Se lo statore e il rotore vengono avvitati a superfici della flangia opposte sulla struttura
della macchina, è necessario un dispositivo di montaggio speciale.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
85
Montaggio del motore
6.1 Montaggio del motore
7. Quest'operazione non va eseguita nel caso di statore e rotore come componenti singoli.
Rimuovere completamente i blocchi di sicurezza ancora presenti.
8. Rimuovere la lamina distanziale. Se la centratura è corretta, la lamina si rimuove
facilmente a mano. Conservare la lamina distanziale per poterla riutilizzare in caso di
trasporto, imballaggio o immagazzinaggio del motore.
9. Verificare la mobilità del rotore. Verificare che nel traferro non siano presenti lamine
distanziali né altri corpi estranei.
10.Collegare i conduttori del liquido di raffreddamento.
11.Collegare il cavo di potenza e il cavo di segnale.
Se i motori vengono forniti come componenti singoli, per il montaggio è necessario
impiegare un dispositivo di assemblaggio speciale.
PERICOLO
Durante la centratura e il montaggio dello statore e del rotore esiste il pericolo di
schiacciamento.
Non centrare né montare lo statore e il rotore manualmente.
Esempio di centratura e montaggio dei motori con camicia di raffreddamento
1. Inserire la lamina distanziale nello statore in modo da lasciar sporgere 1/4 della lamina
5RWRUH
/DPLQDGLVWDQ]LDOH
6WDWRUH
/RVWDWRUHVLWURYD
FHQWUDWRQHOODVHGH
GHOODSDUWHLQIHULRUH
GHOGLVSRVLWLYRGL
DVVHPEODJJLR
,OURWRUHVLWURYD
FHQWUDWRQHOODVHGH
GHOODSDUWHVXSHULRUH
GHOGLVSRVLWLYRGL
DVVHPEODJJLR
2. Inserire delicatamente il rotore con la parte superiore del dispositivo di assemblaggio e
adattarlo nella parte inferiore del dispositivo in modo che il rotore possa essere inserito
nello statore in posizione centrata lungo i cuscinetti radenti e rispetto all'albero
86
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
*XLGH
FXVFLQHWWL
UDGHQWL
$OEHUR
PERICOLO
Durante l'inserimento del rotore esiste il pericolo di schiacciamento.
Procedere con estrema cautela.
3. Introdurre il rotore con la parte superiore del dispositivo di assemblaggio fino al riscontro
che si trova nella parte inferiore dello stesso
4. Installazione e fissaggio dello statore e del rotore. Serrare le viti con la coppia di
serraggio prescritta.
5. Rimuovere la lamina distanziale. Se la centratura è corretta, la lamina distanziale può
essere rimossa facilmente a mano.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
87
Montaggio del motore
6.1 Montaggio del motore
6.1.2
Collegamento del radiatore
Ulteriori informazioni sul collegamento del radiatore si trovano nel capitolo "Interfacce".
Montaggio dell'adattatore di allacciamento per refrigerante
Per il montaggio delle raccorderie necessarie per il collegamento del radiatore nei motori con
raffreddamento integrato sono in genere sufficienti gli utensili standard.
Il montaggio dell'adattatore di allacciamento per refrigerante avviene con tre cilindriche. I
canali di raffreddamento vengono chiusi a tenuta con gli O-ring (vedere le figure che
seguono). Le viti cilindriche e gli O-ring sono compresi nella fornitura iniziale dell'adattatore
di allacciamento per refrigerante.
88
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
9LWHGLILVVDJJLR
,620[$
&RSSLDGLVHUUDJJLR
1P
&ROOHJDPHQWRUDGLDWRUHRS]LRQDOH
$GDWWDWRUHGLDOODFFLDPHQWR
SHUUHIULJHUDQWH
QRQFRPSUHVRQHOOD
IRUQLWXUD
&ROOHJDPHQWRUDGLDWRUH
RS]LRQDOH
/DSLDVWUDGLDOODFFLDPHQWR
SHUUHIULJHUDQWH
ªILVVDWDDOOR
VWDWRUH
7XWWHOHPLVXUHLQPP
6WDWRUH
Figura 6-2
Montaggio dell'adattatore di allacciamento per refrigerante per i motori 1FW616, 1FW619, 1FW623
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
89
Montaggio del motore
6.1 Montaggio del motore
&ROOHJDPHQWRUDGLDWRUHRS]LRQDOH
$GDWWDWRUHGLDOODFFLDPHQWR
SHUUHIULJHUDQWH
QRQFRPSUHVRQHOOD
IRUQLWXUD
9LWHDWHVWDFLOLQGULFD
,620[$
&RSSLDGLVHUUDJJLR
1P
&ROOHJDPHQWRUDGLDWRUH
RS]LRQDOH
/DSLDVWUDGLDOODFFLDPHQWR
SHUUHIULJHUDQWH
ªILVVDWDDOOR
VWDWRUH
6WDWRUH
Figura 6-3
6.1.3
7XWWHOHPLVXUHLQPP
Montaggio dell'adattatore di allacciamento per refrigerante per i motori 1FW629
Avvertenze relative alla posa dei cavi
Per la selezione dei cavi occorre considerare le forze meccaniche dovute alle forti
accelerazioni e alle elevate velocità. I cavi devono inoltre rispondere alle esigenze di
piegatura.
90
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
Durante la posa e il collegamento dei cavi tenere presente quanto segue:
● Devono essere rispettati i raggi di piegatura minimi (vedere il capitolo "Collegamenti
elettrici") per i cavi di potenza liberi (vedere il catalogo NC 61).
● I cavi non devono essere soggetti a sfregamento in alcun punto.
● I cavi vanno fissati adeguatamente e posati a una distanza di 200 mm l'uno dall'altro.
● Quando si collegano cavi PELV con estremità libere, è necessario rispettare le
indicazioni per l'isolamento di protezione secondo EN 61800-5-1.
6.1.4
Verifica dei lavori
Verifica del montaggio
Una volta terminato il montaggio, verificare la mobilità del rotore. Prima di far funzionare il
rotore, rimuovere eventuali utensili e oggetti presenti dal campo di rotazione e nel traferro.
PERICOLO
Pericolo di folgorazione!
Gli allacciamenti di potenza del motore devono essere realizzati correttamente o isolati
prima del funzionamento.
● In linea di principio, l'asse rotante montato deve potersi muovere liberamente.
Esempi di assi non verificabili manualmente:
– assi di grandi dimensioni con attrito elevato
– blocco in assenza di corrente
– forze peso non bilanciate.
PERICOLO
Pericolo per il possibile movimento incontrollato dell'asse.
Prestare la massima attenzione quando si allenta un blocco o un freno in assenza di
corrente o in condizioni di corrente non regolata.
● Le linee di alimentazione devono essere posate e sistemate in modo che non possano
essere in alcun modo piegate, danneggiate o schiacciate dalle parti in rotazione.
● Il percorso delle condutture che contengono il liquido di raffreddamento deve essere
lineare, in modo che il liquido di raffreddamento possa scorrere senza intoppi.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
91
Montaggio del motore
6.1 Montaggio del motore
6.1.5
Esempi di montaggio
Nota
Gli esempi qui descritti non hanno alcuna pretesa di completezza o di idoneità generale per
tutti i casi di applicazione.
Ricordare che il rotore e lo statore possono essere fissati su un solo lato della struttura della
macchina. A seconda della struttura della macchina, lo statore può essere fissato sullo
stesso lato del rotore, oppure sul lato opposto.
Tabella 6- 4
Spiegazioni degli esempi di montaggio illustrati nelle figure
Didascalia
Spiegazione
Tavola rotante con motore Torque La struttura illustrata trova impiego in applicazioni di precisione e
installato con raffreddamento
per tavole orientabili soggette a forze elevate durante la
integrato
lavorazione. L'encoder angolare è integrato nel supporto.
Tavola rotante con motore Torque La struttura raffigurata trova impiego in applicazioni di precisione,
installato con camicia di
macchine a dividere, applicazioni con funzione di arresto e tavole
raffreddamento
orientabili con freno integrato. È compatta e pertanto facilmente
integrabile.
Attuatore circolare con motore
Torque installato con
raffreddamento integrato
La struttura raffigurata può essere vantaggiosamente impiegata
per robot, apparecchi manipolatori e dispositivi di cambio
utensile. L'encoder angolare è adeguatamente isolato dalla fonte
di calore.
Fasi di montaggio di un motore
Torque con raffreddamento
integrato sull'estremità dell'albero
di un attuatore circolare
1.:
Alla consegna, lo statore e del rotore sono montati con i blocchi
di sicurezza per il trasporto sulla flangia B (flangia con uscita del
cavo). Tra lo statore e il rotore si trova la lamina distanziale.
I blocchi di sicurezza per il trasporto vengono allentati e il rotore
con il relativo supporto viene avvitato all'estremità dell'albero.
Rispettare le coppie prescritte e le indicazioni fornite per la
tecnica di fissaggio.
2.:
Lo statore viene posizionato e avvitato nel proprio supporto.
Rispettare le coppie prescritte e le indicazioni fornite per la
tecnica di fissaggio. Solo a questo punto possono essere rimossi
i blocchi di sicurezza per il trasporto e la lamina distanziale.
92
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
Didascalia
Attuatore circolare con motore
Torque installato con camicia di
raffreddamento
Azionamenti a rulli con leggera
inflessione dell'albero con motore
Torque con raffreddamento
integrato
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Spiegazione
La struttura raffigurata è particolarmente indicata in presenza di
forze di carico moderate e di requisiti di media precisione, ad
esempio nelle macchine per la lavorazione del legno, nelle
impacchettatrici e nei dispositivi di cambio utensile. Negli
azionamenti a rulli, questa struttura è adeguata soltanto per gli
assi corti con leggera inflessione.
La struttura illustrata trova impiego negli azionamenti a rulli con
requisiti di coassialità elevati e precisione di posizionamento
ridotta. In questi casi è sufficiente un encoder rotante con
risoluzione angolare moderata. L'encoder deve essere
adeguatamente isolato dalla dilatazione termica dell'albero.
93
&ROOHJDPHQWRHOHWWULFR
7DYRODJLUHYROH
0RWRUH7RUTXHFRQUDIIUHGGDPHQWR
LQWHJUDWR
&ROOHJDPHQWRGHO
UDGLDWRUH
Montaggio del motore
6.1 Montaggio del motore
Figura 6-4
94
Tavola rotante con motore Torque installato con raffreddamento integrato
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
7DYRODJLUHYROH
0RWRUH7RUTXHFRQFDPLFLDGLUDIIUHGGDPHQWR
&ROOHJDPHQWRHOHWWULFR
&ROOHJDPHQWRGHO
UDGLDWRUH
UXRWDWRGLr
Montaggio del motore
6.1 Montaggio del motore
Figura 6-5
Tavola rotante con motore Torque installato con camicia di raffreddamento
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
95
Montaggio del motore
6.1 Montaggio del motore
&ROOHJDPHQWRGHOUDGLDWRUH
&ROOHJDPHQWRHOHWWULFR
$WWXDWRUHFLUFRODUH
0RWRUH7RUTXHFRQUDIIUHGGDPHQWRLQWHJUDWR
Figura 6-6
96
Attuatore circolare con motore Torque installato con raffreddamento integrato
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Montaggio del motore
6.1 Montaggio del motore
$OOHQWDUHLEORFFKLGLVLFXUH]]DSHULOWUDVSRUWR
0RWRUHLQVHULWRQHOODFRVWUX]LRQHGHOODPDFFKLQD
%ORFFKLGLVLFXUH]]DSHULOWUDVSRUWR
Figura 6-7
Fasi di montaggio di un motore Torque con raffreddamento integrato sull'estremità dell'albero di un attuatore
circolare
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
97
&ROOHJDPHQWR
HOHWWULFR
&ROOHJDPHQWRGHO
UDGLDWRUH
$WWXDWRUHFLUFRODUH
0RWRUH7RUTXHFRQFDPLFLDGL
UDIIUHGGDPHQWR
Montaggio del motore
6.1 Montaggio del motore
Figura 6-8
98
Attuatore circolare con motore Torque installato con camicia di raffreddamento
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
&ROOHJDPHQWRGHO
UDGLDWRUH
&ROOHJDPHQWR
HOHWWULFR
$]LRQDPHQWRDUXOOL
0RWRUH7RUTXHFRQUDIIUHGGDPHQWR
LQWHJUDWR
Montaggio del motore
6.1 Montaggio del motore
Figura 6-9
Azionamenti a rulli con leggera inflessione dell'albero con motore Torque con
raffreddamento integrato
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
99
Montaggio del motore
6.2 Protezione dei componenti del motore
6.2
Protezione dei componenti del motore
Grado di protezione
La struttura della macchina che contiene il motore deve garantire almeno il grado di
protezione IP54 secondo EN 60529.
Per i motori integrati, il grado di protezione è determinato dalla struttura della macchina. Più
il vano motore è protetto dalla penetrazione dei corpi estranei meccanici (particelle
elettromagnetiche), più la durata di vita è elevata.
In particolare, le particelle che penetrano nel traferro tra statore e rotore possono provocare
danni meccanici al motore in funzionamento.
Lo stesso vale per le sostanze chimiche aggressive (ad es. liquidi refrigeranti e olii) che
possono penetrare nel vano motore. Le sostanze chimiche aggressive possono
compromettere la tenuta magnetica dei giunti del rotore.
La penetrazione di liquidi può compromettere l'isolamento dello statore.
La penetrazione di liquidi o di corpi estranei influenza le caratteristiche termiche del motore.
AVVERTENZA
La presenza di impurità nel vano motore può provocare una perdita di funzionalità e l'usura
del motore.
100
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Integrazione nel sistema
7.1
7
Requisiti di sistema
Componenti
Il sistema di azionamento, funzionalmente collegato a un motore, è composto da un modulo
di alimentazione, un modulo di potenza e un modulo di regolazione. Nel sistema di
azionamento SINAMICS S120 questi moduli vengono chiamati anche "Line Module", "Motor
Module" e "Control Unit". Il Line Module è disponibile nella versione regolata con
alimentazione di ritorno (ALM, Active Line Module), non regolata con alimentazione di
ritorno, (SLM, Smart Line Module) e non regolata senza alimentazione di ritorno (BLM, Basic
Line Module).
Per il funzionamento simultaneo con più motori su un sistema di azionamento può essere
impiegato, a seconda dell'applicazione, un Motor Module per motore o un Motor Module per
più motori. Il Line Module corrispondente viene determinato in funzione della potenza
assorbita dai motori utilizzati.
Nota
I codici di ordinazione dei cavi di potenza riportati nelle seguenti figure non sono validi per i
motori con conduttori singoli.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
101
Integrazione nel sistema
7.1 Requisiti di sistema
&RQILJXUD]LRQHGHLILOL
$WWDFFRSRWHQ]D
&RORUH
YHUGHJLDOOR
VZRSSXUH
VZRSSXUH
VZRSSXUH
/DPLHUDSHULOFROOHJDPHQWR
0RWRU0RGXOH
&ROOHJDPHQWR
Figura 7-1
102
Integrazione nel sistema con collegamento delle sonde termiche PTC 150 °C, PTC 130 °C e KTY 84 tramite
SME125; WMS: EnDat
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Integrazione nel sistema
7.1 Requisiti di sistema
&RQILJXUD]LRQHGHLILOL
$WWDFFRSRWHQ]D
&RORUH
&ROOHJDPHQWR
YHUGHJLDOOR
VZRSSXUH
VZRSSXUH
VZRSSXUH
/DPLHUDSHULO
FROOHJDPHQWRGHOOD
VFKHUPDWXUD
0RWRU0RGXOH
Figura 7-2
Integrazione nel sistema con collegamento delle sonde termiche PTC 150 °C, PTC 130 °C e KTY 84 tramite
SME120; WMS: incrementale
Nota
Per le grandezze connettore, vedere la tabella "Dati del cavo di potenza sullo statore" nel
capitolo "Interfacce".
Nota
Per informazioni sui moduli SME12x, consultare il manuale dell'apparecchio "SINAMICS
S120 - Control Unit e componenti di sistema integrativi", disponibile su richiesta presso la
filiale Siemens di zona.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
103
Integrazione nel sistema
7.1 Requisiti di sistema
Tensioni consentite
Per i motori valgono le tensioni di rete ammesse per i sistemi di reti TN indicate nella
seguente tabella.
Tabella 7- 1
Tensioni di rete ammesse per i sistemi di reti TN, tensioni risultanti del circuito
intermedio e tensioni di uscita del convertitore
Tensione di rete
ammessa
Tensione risultante del circuito
intermedio UZK
Tensione di uscita del convertitore
(valore effettivo) Uamax
400 V
600 V (regolata)
425 V (regolata)
528 V (non regolata)
380 V (non regolata)
480 V
634 V (non regolata)
460 V (non regolata)
I motori sono omologati congiuntamente al sistema di azionamento SINAMICS S120 per
operare su reti TN e TT con centro stella messo a terra, nonché su reti IT. Per il
funzionamento su reti IT è necessario prevedere un dispositivo di protezione che garantisca
la disinserzione del sistema di azionamento in caso di anomalia.
Per il funzionamento con conduttore di fase messo a terra occorre inserire un trasformatore
di isolamento con centro stella messo a terra (lato secondario) tra rete e sistema di
azionamento, in modo da evitare sollecitazioni non ammesse dell'isolamento del motore.
Presupposti
● La scelta della parte di potenza dipende dalla corrente del motore con coppia M0 e
numero di giri 1 [1/min] oppure dalla corrente massima del motore.
● Il sistema encoder utilizzato deve essere adeguato all'applicazione.
Sistema di azionamento
Tabella 7- 2
Unità di regolazione e controllori per il sistema di azionamento SINAMICS S120
Unità di regolazione
--
Controllori
CU-320
SINUMERIK 840D sl
NCU-7x0 / NX1x
SINUMERIK 840Di sl
CU-320
SIMATIC
CU-320
SIMOTION
D4x0 /CX32
Nota
Attenersi alle istruzioni riportate nella documentazione relativa alle unità di regolazione ai
controllori.
104
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Integrazione nel sistema
7.1 Requisiti di sistema
Nota
Nei sistemi con azionamenti diretti collegati ad alimentatori regolati, si possono verificare
oscillazioni elettriche riferite al potenziale di terra. Queste oscillazioni sono determinate tra
l'altro dai seguenti fattori:
lunghezza dei cavi
dimensione dell'unità di alimentazione/recupero
numero di assi
dimensioni del motore
progettazione dell'avvolgimento del motore
tipo di rete
luogo di installazione.
Le oscillazioni provocano carichi di tensione maggiori e possono danneggiare l'isolamento
principale. Si raccomanda pertanto di utilizzare un'induttanza HFD con resistenza per lo
smorzamento delle oscillazioni. Per informazioni dettagliate, vedere le documentazioni dei
sistemi di azionamento utilizzati o rivolgersi alla filiale Siemens di competenza.
Grado di precisione
Il grado di precisione di un azionamento diretto con motore Torque è determinato dai
seguenti fattori:
● esecuzione meccanica della macchina
● tecnica di regolazione impiegata
● Risoluzione encoder e precisione di misura dell'encoder
Meccanica
La precisione di lavorazione ottenibile da un sistema di azionamento con motore Torque è
influenzata da:
● rigidità meccanica e resistenza ai guasti del sistema di azionamento
● regolarità di marcia.
La regolarità di marcia in senso assiale e radiale dipende dall'esecuzione e dalla precisione
dei cuscinetti. Questi requisiti vengono soddisfatti da una struttura degli assi adeguata.
Qualità di regolazione
La qualità di regolazione di un azionamento diretto con motore Torque è determinata dai
seguenti fattori:
● Rigidità del sistema di azionamento (qualità dinamica di involucro e struttura della
macchina, cuscinetto, montaggio dell'encoder)
● Precisione raggiunta nel montaggio e nella taratura del sistema encoder
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
105
Integrazione nel sistema
7.2 Encoder
● Quantizzazione del segnale angolare e del segnale di velocità (è determinante il numero
di tacche dell'encoder e la loro moltiplicazione nella valutazione encoder del convertitore
per ogni giro dell'asse)
● Tempo di campionamento del regolatore di corrente, numero di giri e posizione
7.2
Encoder
Sistema encoder
Il sistema encoder ha varie funzioni:
● retroazione per la regolazione del numero di giri
● retroazione per la regolazione della posizione
● indicazione della posizione del rotore (commutazione)
Il sistema encoder non è compreso nella fornitura. Dato il numero e la varietà di applicazioni
possibili, non è purtroppo possibile fornire un elenco esauriente degli encoder idonei.
Esempio di encoder angolare con EnDat: serie RCN, ditta Heidenhain
Esempi di encoder angolari incrementali (1Vpp): serie RON, ERA, ROD, ditta Heidenhain
ATTENZIONE
Non si assume alcuna responsabilità di garanzia per i prodotti di altri fornitori. Attenersi a
quanto espressamente specificato nel capitolo "Raccomandazioni del costruttore"
dell'appendice.
Requisiti dell'encoder
La selezione dell'encoder si basa sulle condizioni generali specifiche per l'applicazione e per
il convertitore. La risoluzione dell'encoder si basa sui requisiti di precisione e di rigidità.
Tenere anche conto della documentazione del sistema di azionamento utilizzato.
AVVERTENZA
Una commutazione errata può provocare movimenti incontrollati del motore.
Quando si sostituisce l'encoder, accertarsi che l'impostazione della commutazione sia
corretta. Le operazioni necessarie devono essere eseguite solo da personale qualificato.
106
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Integrazione nel sistema
7.2 Encoder
Nota
Per garantire una buona dinamica del circuito di regolazione (fattore kV elevato), un
posizionamento rapido e senza oscillazioni e un buon sincronismo, sono preferibili i sistemi
di misura a partire da circa 10.000 tacche per giro.
Nota
Per evitare imbrattamenti, l'ambiente dell'encoder in prossimità della struttura meccanica
degli assi del motore Torque integrato deve rispondere al grado di protezione IP54 secondo
EN 60529.
È necessario rispettare il numero di giri meccanico ammesso e la frequenza limite ammessa
dell'encoder e dell'unità di regolazione. Per la progettazione, il montaggio e la taratura
dell'encoder occorre rispettare le indicazioni riportate nella relativa documentazione del
costruttore.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
107
Integrazione nel sistema
7.2 Encoder
'LVSRVL]LRQHDGHJXDWDGHOO
HQFRGHU
'LVWULEXWRUHLGUDXOLFR
7DYRODJLUHYROH
&XVFLQHWWR
6WDWRUH
5RWRUH
(QFRGHU
ವ 'LVWDQ]DULGRWWDWUDLOPRWRUHHO
HQFRGHUPRWRUH
ವ )LVVDJJLRULJLGRGHOO
HQFRGHUPRWRUH
ವ 1HVVXQDJXLGDVSLQWDWUDLOPRWRUHHO
HQFRGHUPRWRUH
'LVSRVL]LRQHVIDYRUHYROHGHOO
HQFRGHU
'LVWULEXWRUHLGUDXOLFR
(QFRGHU
7DYRODJLUHYROH
&XVFLQHWWR
6WDWRUH
5RWRUH
ವ 'LVWDQ]DHOHYDWDWUDLOPRWRUHHO
HQFRGHUPRWRUH
ವ 5LJLGLW¢GHOODPDFFKLQDULGRWWDDFDXVDGLXQDSLDVWUDWURSSRILQHSHULOILVVDJJLRGHOO
HQFRGHUPRWRUH
ವ *XLGDVSLQWDWUDLOPRWRUHHO
HQFRGHUPRWRUH
Figura 7-3
Schema di incasso e montaggio (esempio)
Nota
Per altri esempi di montaggio consultare il capitolo "Montaggio del motore".
108
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Integrazione nel sistema
7.3 Cuscinetto
7.3
Cuscinetto
Scelta del cuscinetto
I motori Torque 1FW6 sono motori integrati per assi di rotazione o di inclinazione ad
azionamento diretto. Per il montaggio di un'unità di azionamento completa è necessario,
oltre al sistema encoder angolare, un cuscinetto tra statore e rotore.
La scelta del cuscinetto è determinata dai seguenti fattori:
● Requisiti geometrici (diametro interno ed esterno)
● Numero di giri
● Carico (valore, direzione)
● Rigidità (precisione, precarico)
● Durata utile
Il cuscinetto non è compreso nella fornitura.
AVVERTENZA
Correnti dei cuscinetti e carica statica del rotore:
A seconda della costruzione e della conformazione dei cuscinetti, possono prodursi delle
cariche statiche.
Si devono pertanto prevedere contromisure adeguate, ad es. l'isolamento del cuscinetto o
la messa a terra.
Nota
Tra statore e rotore agiscono delle forze radiali che devono essere tenute in considerazione
nella scelta del cuscinetto (vedere anche il capitolo "Montaggio del motore").
7.4
Concetti di frenatura
AVVERTENZA
Le anomalie di funzionamento su un asse macchina in rotazione possono provocare
l'arresto per inerzia incontrollato dell'azionamento.
Devono essere prese le misure adeguate per frenare l'azionamento alla massima energia
cinetica possibile qualora si verifichi un'anomalia.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
109
Integrazione nel sistema
7.4 Concetti di frenatura
La progettazione dei sistemi di frenatura meccanici dipende dall'energia cinetica massima,
cioè dal momento di inerzia massimo delle masse in rotazione e dal relativo numero di giri
massimo.
Anomalie possibili di funzionamento
Anomalie di funzionamento possono verificarsi, ad esempio, nei casi seguenti:
● guasto della rete elettrica
● guasto dell'encoder, intervento della sorveglianza encoder
● guasto del controllo di livello superiore (ad es. NCU), guasto del bus
● guasto del modulo di regolazione
● errori dell'azionamento
● errori nell'NC
In questa sezione sono presentate alcune possibilità di frenatura delle masse in rotazione in
caso di anomalie di funzionamento.
Concetti di frenatura
Per gli assi rotanti, il cui angolo di rotazione è limitato a < 360°, una misura di protezione
affidabile è l'impiego di elementi di smorzamento e di attenuazione degli urti alle estremità
del percorso di rotazione.
Per dissipare l'energia cinetica della massa in rotazione prima che si scarichi sugli elementi
di smorzamento, è necessario assumere anche le seguenti misure a sostegno del sistema di
frenatura:
1. Frenatura elettrica tramite l'energia presente nel circuito intermedio:
il circuito intermedio deve disporre di moduli condensatori in grado di accumulare
un'energia sufficiente a frenare in sicurezza la massa in rotazione in caso di guasto della
rete elettrica. Devono essere altresì presenti resistenze di frenatura che impediscono
l'incremento della tensione nel circuito intermedio oltre il valore massimo.
Svantaggio: questa misura può essere inefficace in caso di guasto del modulo di
regolazione e in caso di guasto del sistema encoder. Tenere anche conto della
documentazione del sistema di azionamento utilizzato.
2. Frenatura elettrica tramite cortocircuito dell'indotto dello statore:
se non c'è una funzione corrispondente nel sistema di azionamento utilizzato, in caso di
guasto i morsetti di allacciamento al motore vengono separati dal sistema di azionamento
e cortocircuitati con un contattore automatico. Tenere anche conto della documentazione
del sistema di azionamento utilizzato.
Svantaggio: la coppia frenante dipende dal numero di giri e in alcuni casi può non essere
sufficiente a frenare le masse in rotazione.
Nota
In caso di frenatura per cortocircuito dell'indotto senza resistenze di frenatura sono
necessarie protezioni speciali, poiché possono essere presenti correnti molto elevate. Deve essere rispettato lo schema dei tempi per il sistema di azionamento.
3. Frenatura meccanica mediante elementi di frenatura:
la capacità frenante deve essere massimizzata in misura tale da frenare in sicurezza la
110
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Integrazione nel sistema
7.4 Concetti di frenatura
massa in rotazione alla massima energia cinetica.
Svantaggio: il tempo di intervento relativamente lungo del comando freno in funzione del
numero di giri può far sì che la massa continui a ruotare per un certo tempo senza essere
frenata.
Si raccomanda di prevedere la combinazione di tutte le tre misure. Le misure (2) e (3)
fungono in questo caso da sicurezza aggiuntiva nel caso in cui fallisca la misura (1): il
cortocircuito dello statore agisce prima alle alte velocità, mentre a quelle più basse interviene
il freno meccanico.
I costruttori raccomandati di elementi di frenatura sono elencati nell'appendice.
Impiego di un freno di stazionamento
I motori Torque possono essere attirati in una posizione magnetica preferenziale per effetto
di una coppia di riposo quando il motore non è più alimentato dall'azionamento. In questo
caso, se l'azionamento è già fermo, possono prodursi movimenti imprevisti fino a mezza
divisione polare del magnete in entrambe le direzioni. Per evitare possibili danni al pezzo e
/o all'utensile, può essere opportuno utilizzare un freno di stazionamento.
Dato che manca il bloccaggio automatico, in caso di azionamenti inclinati oppure orizzontali
senza compensazione del peso dovrebbe essere previsto un freno di stazionamento per
permettere di arrestare e disinserire l'azionamento in qualsiasi posizione.
AVVERTENZA
Nel caso di assi inclinati e orizzontali, se il baricentro si trova all'esterno dell'asse rotante è
possibile che in assenza di corrente il carico ruoti verso il basso in modo incontrollato.
Un freno di stazionamento può anche essere necessario quando:
● l'attrito dei cuscinetti non compensa o non supera i momenti di arresto e quindi possono
prodursi movimenti imprevedibili
● movimenti imprevedibili dell'azionamento possono provocare danni (ad es. se un motore
con una grande massa raggiunge anche una grande energia cinetica)
● azionamenti sotto carico devono essere arrestati e disinseriti in qualsiasi posizione
Per evitare movimenti all'inserzione e alla disinserzione dell'azionamento, la reazione del
freno di stazionamento deve essere sincronizzata con l'azionamento.
Per la messa in servizio tenere anche conto della documentazione del sistema di
azionamento utilizzato.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
111
8
Interfacce
8.1
Panoramica
Componenti di collegamento elettrici
Tabella 8- 1
Panoramica dei tipi di motore ordinabili in funzione della posizione dei collegamenti
elettrici
Sigla di ordinazione (MLFB)
Uscita dei cavi
Scarico del tiro
1FW6090-0PBxx-xxxx
assiale
manicotto
1FW6090-0QBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6090-0NBxx-xxxx
tangenziale
manicotto
1FW6130-0PBxx-xxxx
assiale
manicotto
1FW6130-0QBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6130-0NBxx-xxxx
tangenziale
manicotto
1FW6150-0PBxx-xxxx
assiale
manicotto
1FW6150-0QBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6150-0NBxx-xxxx
tangenziale
manicotto
1FW6160-0WBxx-xxxx
assiale
manicotto
1FW6160-0VBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6160-0TBxx-xxxx
tangenziale
manicotto
1FW6190-0WBxx-xxxx
assiale
manicotto
1FW6190-0VBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6190-0TBxx-xxxx
tangenziale
manicotto
1FW6230-0WBxx-xxxx
assiale
manicotto
1FW6230-0VBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6230-0TBxx-xxxx
tangenziale
manicotto
1FW6290-0WBxx-xxxx
assiale
manicotto
1FW6290-0VBxx-xxxx
Radiale verso l'esterno
manicotto
1FW6290-0TBxx-xxxx
tangenziale
manicotto
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
113
Interfacce
8.1 Panoramica
Dimensioni dei collegamenti elettrici
&DYRGLVHJQDOH[37&[.7<
&DYRGLSRWHQ]D89:3(
%ORFFRGL
FRQQHVVLRQH
6WDWRUH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-1
114
7XWWHOHPLVXUHLQPP
Collegamento elettrico assiale con manicotto per 1FW609
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH[37&[.7<
&DYRGLSRWHQ]D89:3(
%ORFFRGLFRQQHVVLRQH
6WDWRUH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-2
7XWWHOHPLVXUHLQPP
Collegamento elettrico radiale verso l'esterno con manicotto per 1FW609
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
115
Interfacce
8.1 Panoramica
%ORFFRGLFRQQHVVLRQH
6WDWRUH
&DYRGLVHJQDOH
[37&[.7<
&DYRGLSRWHQ]D89:3(
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-3
Collegamento elettrico tangenziale con manicotto per 1FW609
&DYRGLSRWHQ]D89:3(
&DYRGLVHJQDOH[37&[.7<
6WDWRUH
%ORFFRGL
FRQQHVVLRQH
7XWWHOHPLVXUHLQPP
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-4
116
Collegamento elettrico assiale con manicotto per 1FW613
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLSRWHQ]D89:3(
&DYRGHLVHJQDOL
[37&[.7<
6WDWRUH
%ORFFRGLFRQQHVVLRQH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-5
Collegamento elettrico radiale verso l'esterno con manicotto per 1FW613
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
117
Interfacce
8.1 Panoramica
6WDWRUH
%ORFFRGL
FRQQHVVLRQH
&DYRGLSRWHQ]D
89:3(
&DYRGHLVHJQDOL
[37&[.7<
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-6
118
7XWWHOHPLVXUHLQPP
Collegamento elettrico tangenziale con manicotto per 1FW613
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLSRWHQ]D
89:3(
&DYRGLVHJQDOH
[37&[.7<
%ORFFRGL
FRQQHVVLRQH
6WDWRUH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-7
Collegamento elettrico assiale con manicotto per 1FW615
&DYRGLSRWHQ]D
89:3(
&DYRGLVHJQDOH
[37&[.7<
%ORFFRGLFRQQHVVLRQH
6WDWRUH
7XWWHOHPLVXUHLQPP
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-8
Collegamento elettrico radiale verso l'esterno con manicotto per 1FW615
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
119
Interfacce
8.1 Panoramica
6WDWRUH
%ORFFRGLFRQQHVVLRQH
&DYRGLVHJQDOH
[37&[.7<
&DYRGLSRWHQ]D
89:3(
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-9
Collegamento elettrico tangenziale con manicotto per 1FW615
&DYRGLVHJQDOH[37&[.7<
&DYRGLSRWHQ]D89:3(
%ORFFRGLFRQQHVVLRQH
6WDWRUH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-10
120
7XWWHOHPLVXUHLQPP
Collegamento elettrico assiale con manicotto per 1FW616, 1FW619 e 1FW623
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
&DYRGLVHJQDOH
[37&[.7<
7XWWHOHPLVXUHLQPP
Figura 8-11
Collegamento elettrico assiale con manicotto e conduttore singolo per 1FW616, 1FW619
e 1FW623, sezione conduttore 25 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
121
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
&DYRGLVHJQDOH
[37&[.7<
7XWWHOHPLVXUHLQPP
Figura 8-12
122
Collegamento elettrico assiale con manicotto e conduttore singolo per 1FW623, sezione
conduttore 35 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
&DYRGLVHJQDOH
[37&[.7<
7XWWHOHPLVXUHLQPP
Figura 8-13
Collegamento elettrico assiale con manicotto e conduttore singolo per 1FW616 e
1FW619, sezione conduttore 50 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
123
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
&DYRGLVHJQDOH
[37&[.7<
7XWWHOHPLVXUHLQPP
Figura 8-14
124
Collegamento elettrico assiale con manicotto e conduttore singolo per 1FW616, 1FW619
e 1FW623, sezione conduttore 70 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGHLVHJQDOL
[37&[.7<
&DYRGLSRWHQ]D89:3(
6WDWRUH
%ORFFRGL
FRQQHVVLRQH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-15
Collegamento elettrico radiale verso l'esterno con manicotto per 1FW616, 1FW619 e 1FW623, sezione
conduttore fino a 6 mm2
&DYRGLVHJQDOH[37&[.7<
&DYRGLSRWHQ]D89:3(
%ORFFRGLFRQQHVVLRQH
6WDWRUH
7XWWHOHPLVXUHLQPP
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-16
Collegamento elettrico radiale verso l'esterno con manicotto per 1FW616, 1FW619 e 1FW623, sezione
conduttore a partire da 10 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
125
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH
[37&[.7<
&DYLGLSRWHQ]DDXQILOR
7XWWHOHPLVXUHLQPP
Figura 8-17
126
Collegamento elettrico radiale verso l'esterno con manicotto e conduttore singolo per 1FW616, 1FW619 e
1FW623, sezione conduttore 25 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
&DYRGLVHJQDOH
[37&[.7<
7XWWHOHPLVXUHLQPP
Figura 8-18
Collegamento elettrico radiale verso l'esterno con manicotto e conduttore singolo per 1FW623, sezione
conduttore 35 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
127
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH
[37&[.7<
&DYLGLSRWHQ]DDXQILOR
7XWWHOHPLVXUHLQPP
Figura 8-19
128
Collegamento elettrico radiale verso l'esterno con manicotto e conduttore singolo per 1FW616 e 1FW619,
sezione conduttore 50 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH
[37&[.7<
&DYLGLSRWHQ]DDXQILOR
7XWWHOHPLVXUHLQPP
Figura 8-20
Collegamento elettrico radiale verso l'esterno con manicotto e conduttore singolo per 1FW616, 1FW619 e
1FW623, sezione conduttore 70 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
129
Interfacce
8.1 Panoramica
&DYRGHLVHJQDOL
[37&[.7<
&DYRGLSRWHQ]D
89:3(
%ORFFRGLFRQQHVVLRQH
6WDWRUH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-21
Collegamento elettrico tangenziale con manicotto per 1FW616, 1FW619 e 1FW623
&DYRGLVHJQDOH[37&[.7<
&DYRGLSRWHQ]D
89:3(
6WDWRUH
%ORFFRGL
FRQQHVVLRQH
7XWWHOHPLVXUHLQPP
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-22
130
Collegamento elettrico assiale con manicotto per 1FW629
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH
[37&[.7<
&DYLGLSRWHQ]DDXQILOR
%ORFFRGL
FRQQHVVLRQH
6WDWRUH
7XWWHOHPLVXUHLQPP
Figura 8-23
Collegamento elettrico assiale con manicotto e conduttore singolo per 1FW629, sezione conduttore 35 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
131
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
&DYRGLVHJQDOH
[37&[.7<
%ORFFRGL
FRQQHVVLRQH
6WDWRUH
7XWWHOHPLVXUHLQPP
Figura 8-24
132
Collegamento elettrico assiale con manicotto e conduttore singolo per 1FW629, sezione conduttore 70 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLSRWHQ]D89:3(
&DYRGLVHJQDOH[37&[.7<
6WDWRUH
%ORFFRGL
FRQQHVVLRQH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
Figura 8-25
7XWWHOHPLVXUHLQPP
Collegamento elettrico radiale verso l'esterno con manicotto per 1FW629
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
133
Interfacce
8.1 Panoramica
&DYLGLSRWHQ]DDXQILOR
%ORFFRGLFRQQHVVLRQH
6WDWRUH
&DYRGLVHJQDOH
[37&[.7<
7XWWHOHPLVXUHLQPP
Figura 8-26
134
Collegamento elettrico radiale verso l'esterno con manicotto e conduttore singolo per 1FW629, sezione
conduttore 35 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH
[37&[.7<
&DYLGLSRWHQ]DDXQILOR
6WDWRUH
%ORFFRGLFRQQHVVLRQH
7XWWHOHPLVXUHLQPP
Figura 8-27
Collegamento elettrico radiale verso l'esterno con manicotto e conduttore singolo per 1FW629, sezione
conduttore 70 mm2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
135
Interfacce
8.1 Panoramica
&DYRGLVHJQDOH[37&[.7<
6WDWRUH
&DYRGLSRWHQ]D89:3(
%ORFFRGL
FRQQHVVLRQH
/DVH]LRQHGHOFDYRGLSRWHQ]DGLSHQGH
GDOODYDULDQWHGHOO
DYYROJLPHQWR
7XWWHOHPLVXUHLQPP
Figura 8-28
Collegamento elettrico tangenziale con manicotto per 1FW629
Tabella 8- 2
Dati del cavo di potenza sullo statore
Tipo di motore
Sezione max.
"d1" in mm 1)
Numero di
conduttori x
sezione in mm2
Raggio di
piegatura min.
"R1" in mm 1)
Altezza del
manicotto "C1" in
mm
Grandezza
connettore 2)
1FW6090-xxB05-0Fxx
12,1
4x2,5
73
18
1
1FW6090-xxB05-0Kxx
12,1
4x2,5
73
18
1
1FW6090-xxB07-0Kxx
12,1
4x2,5
73
18
1
1FW6090-xxB07-1Jxx
12,1
4x2,5
73
18
1
1FW6090-xxB10-0Kxx
12,1
4x2,5
73
18
1
1FW6090-xxB10-1Jxx
12,1
4x2,5
73
18
1
1FW6090-xxB15-1Jxx
12,1
4x2,5
73
18
1
1FW6090-xxB15-2Jxx
13,2
4x4,0
79
23
1,5
1FW6130-xxB05-0Kxx
12,1
4x2,5
73
18
1
1FW6130-xxB05-1Jxx
12,1
4x2,5
73
18
1
1FW6130-xxB07-0Kxx
12,1
4x2,5
73
18
1
1FW6130-xxB07-1Jxx
12,1
4x2,5
73
18
1
1FW6130-xxB10-1Jxx
12,1
4x2,5
73
18
1
136
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
Tipo di motore
Sezione max.
"d1" in mm 1)
Numero di
conduttori x
sezione in mm2
Raggio di
piegatura min.
"R1" in mm 1)
Altezza del
manicotto "C1" in
mm
Grandezza
connettore 2)
1FW6130-xxB10-2Jxx
13,2
4x4,0
79
23
1,5
1FW6130-xxB15-1Jxx
12,1
4x2,5
73
18
1
1FW6130-xxB15-2Jxx
13,2
4x4,0
79
23
1,5
1FW6150-xxB05-1Jxx
12,1
4x2,5
73
25
1
1FW6150-xxB05-4Fxx
19,4
4x10,0
116
27
1,5
1FW6150-xxB07-2Jxx
13,2
4x4,0
79
26
1,5
1FW6150-xxB07-4Fxx
19,4
4x10,0
116
27
1,5
1FW6150-xxB10-2Jxx
13,2
4x4,0
79
26
1,5
1FW6150-xxB10-4Fxx
19,4
4x10,0
116
27
1,5
1FW6150-xxB15-2Jxx
13,2
4x4,0
79
26
1,5
1FW6150-xxB15-4Fxx
19,4
4x10,0
116
27
1,5
1FW6160-xxB05-1Jxx
12,1
4x2,5
73
28,5
1
1FW6160-xxB05-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6160-xxB05-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6160-xxB07-1Jxx
12,1
4x2,5
73
28,5
1
1FW6160-xxB07-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6160-xxB07-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6160-xxB07-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6160-xxB10-1Jxx
12,1
4x2,5
73
28,5
1
1FW6160-xxB10-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6160-xxB10-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6160-xxB10-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6160-xxB10-2Pxx
17,7
3x(1x50) + M10 f.
PE (1x25)*)
133
29
-
1FW6160-xxB15-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6160-xxB15-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6160-xxB15-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6160-xxB15-2Pxx
17,7
3x(1x50) + M10 f.
PE (1x25)*)
133
29
-
1FW6160-xxB15-0Wxx
20,0
3x(1x70) + M10 f.
PE (1x35)*)
150,0
29
-
1FW6160-xxB20-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6160-xxB20-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6160-xxB20-2Pxx
17,7
3x(1x50) + M10 f.
PE (1x25)*)
133
29
-
1FW6160-xxB20-0Wxx
20,0
3x(1x70) + M10 f.
PE (1x35)*)
150,0
29
-
1FW6190-xxB05-1Jxx
12,1
4x2,5
73
28,5
1
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
137
Interfacce
8.1 Panoramica
Tipo di motore
Sezione max.
"d1" in mm 1)
Numero di
conduttori x
sezione in mm2
Raggio di
piegatura min.
"R1" in mm 1)
Altezza del
manicotto "C1" in
mm
Grandezza
connettore 2)
1FW6190-xxB05-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6190-xxB05-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6190-xxB07-1Jxx
12,1
4x2,5
73
28,5
1
1FW6190-xxB07-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6190-xxB07-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6190-xxB07-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6190-xxB10-1Jxx
12,1
4x2,5
73
28,5
1
1FW6190-xxB10-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6190-xxB10-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6190-xxB10-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6190-xxB10-2Pxx
17,7
3x(1x50) + M10 f.
PE (1x25)*)
133
29
-
1FW6190-xxB15-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6190-xxB15-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6190-xxB15-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6190-xxB15-2Pxx
17,7
3x(1x50) + M10 f.
PE (1x25)*)
133
29
-
1FW6190-xxB15-0Wxx
20,0
3x(1x70) + M10 f.
PE (1x35)*)
150,0
29
-
1FW6190-xxB20-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6190-xxB20-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6190-xxB20-2Pxx
17,7
3x(1x50) + M10 f.
PE (1x25)*)
133
29
-
1FW6190-xxB20-0Wxx
20,0
3x(1x70) + M10 f.
PE (1x35)*)
150,0
29
-
1FW6230-xxB05-1Jxx
12,1
4x2,5
73
28,5
1
1FW6230-xxB05-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6230-xxB05-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6230-xxB07-1Jxx
12,1
4x2,5
73
28,5
1
1FW6230-xxB07-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6230-xxB07-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6230-xxB07-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6230-xxB10-2Jxx
13,2
4x4,0
79
29,5
1,5
1FW6230-xxB10-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6230-xxB10-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6230-xxB10-2Pxx
15,6
3x(1x35) + M10 f.
PE (1x25)*)
117,0
26
-
138
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
Tipo di motore
Sezione max.
"d1" in mm 1)
Numero di
conduttori x
sezione in mm2
Raggio di
piegatura min.
"R1" in mm 1)
Altezza del
manicotto "C1" in
mm
Grandezza
connettore 2)
1FW6230-xxB15-4Cxx
16,0
4x6,0
96
31,5
1,5
1FW6230-xxB15-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6230-xxB15-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6230-xxB15-2Pxx
15,6
3x(1x35) + M10 f.
PE (1x25)*)
117,0
26
-
1FW6230-xxB15-0Wxx
20,0
3x(1x70) + M10 f.
PE (1x35)*)
150,0
29
-
1FW6230-xxB20-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6230-xxB20-8Fxx
13,0
3x(1x25) + M10 f.
PE (1x25)*)
97,5
23
-
1FW6230-xxB20-2Pxx
15,6
3x(1x35) + M10 f.
PE (1x25)*)
117,0
26
-
1FW6230-xxB20-0Wxx
20,0
3x(1x70) + M10 f.
PE (1x35)*)
150,0
29
-
1FW6290-xxB07-5Gxx
23,6
4x16,0
142
35,5
1,5
1FW6290-xxB07-0Lxx
d(35) = 15,6
d(25) = 13,0
3x(1x35)+1x25
R(35) = 133
R(25) = 97,5
26
-
1FW6290-xxB07-2Pxx
d(70) = 20,0
d(35) = 15,6
3x(1x70)+1x35
R(70) = 150,0
R(35) = 132,5
29
-
1FW6290-xxB11-7Axx
23,6
4x16,0
142
35,5
1,5
1FW6290-xxB11-0Lxx
d(35) = 15,6
d(25) = 13,0
3x(1x35)+1x25
R(35) = 133
R(25) = 97,5
26
-
1FW6290-xxB11-2Pxx
d(70) = 20,0
d(35) = 15,6
3x(1x70)+1x35
R(70) = 150,0
R(35) = 132,5
29
-
1FW6290-xxB15-7Axx
23,6
4x16,0
142
35,5
1,5
1FW6290-xxB15-0Lxx
d(35) = 15,6
d(25) = 13,0
3x(1x35)+1x25
R(35) = 133
R(25) = 97,5
26
-
1FW6290-xxB15-2Pxx
d(70) = 20,0
d(35) = 15,6
3x(1x70)+1x35
R(70) = 150,0
R(35) = 132,5
29
-
1FW6290-xxB20-0Lxx
d(35) = 15,6
d(25) = 13,0
3x(1x35)+1x25
R(35) = 133
R(25) = 97,5
26
-
1FW6290-xxB20-2Pxx
d(70) = 20
d(35) = 15,6
3x(1x70)+1x35
R(70) = 150,0
R(35) = 132,5
29
-
1)
Cavo di potenza ad allacciamento fisso; 2) si riferisce ai motori con connettori
*) conduttore di protezione da collegare separatamente (PE), non compreso nella fornitura
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
139
Interfacce
8.1 Panoramica
Tabella 8- 3
Dati del cavo del segnale sullo statore
Tipo di motore
1FW6xxx-xxxxx-xxxx
1)
Sezione "d2"
in mm 1)
12
Cavo del segnale ad allacciamento fisso;
140
Numero di conduttori
(conduttori di segnale) x
sezione + numero di
conduttori (PE) x sezione in
mm2
Raggio di
piegatura
min. "R2" in
mm 1)
6 x 0,5 + 1 x 1,0
2)
48
Altezza del
manicotto
"C2" in mm
18
Grandezza
connettore 2)
M17
si riferisce ai motori con connettori
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.1 Panoramica
&RQQHWWRUHGLSRWHQ]DJU
5DIILJXUD]LRQHGHLSROLYLVWDODWRFRQQHWWRUH
&RQQHWWRUHGLSRWHQ]DJU
5DIILJXUD]LRQHGHLSROLYLVWDODWRFRQQHWWRUH
$VVHJQD]LRQHGHLFROOHJDPHQWLHOHWWULFL
&RQQHWWRUHGLVHJQDOH0
5DIILJXUD]LRQHGHLSROLYLVWDODWRFRQQHWWRUH
$VVHJQD]LRQHGHLFROOHJDPHQWLHOHWWULFL
QRQYLHQHYDOXWDWRGDOO
60([
Figura 8-29
Assegnazioni dei pin del connettore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
141
Interfacce
8.2 Collegamenti elettrici
8.2
Collegamenti elettrici
PERICOLO
Se i motori vengono collegati in modo non corretto, sussiste il pericolo di morte, gravi
lesioni alle persone (scossa elettrica) e/o danni materiali.
I motori devono essere collegati secondo lo schema elettrico fornito in questa
documentazione e richiedono un'impressione di corrente di forma sinusoidale. Non è
consentito il collegamento diretto dei motori alla rete in corrente alternata perchè questo
potrebbe distruggere i motori.
I motori sono concepiti per il funzionamento su sistemi di azionamento alimentati mediante
reti di alimentazione (reti TN) con messa a terra a bassa resistenza.
Tenere anche conto della documentazione del sistema di azionamento utilizzato.
PERICOLO
I componenti di apparecchiature elettriche possono essere sottoposti a tensioni pericolose.
Esiste il pericolo di folgorazione!
Quando il rotore è in movimento, sui morsetti del motore è presente una tensione che
aumenta proporzionalmente con il numero di giri. Al regime minimo, il valore di ampiezza
della tensione sui morsetti del motore corrisponde al valore di tensione del circuito
intermedio del convertitore.
Tutti gli interventi relativi al sistema elettrico devono essere eseguiti solo da personale
specializzato, in assenza di tensione e a motore fermo.
Rispettare le norme per gli interventi sugli impianti elettrotecnici.
Vanno particolarmente rispettate le regole di sicurezza per i lavori negli impianti elettrici a
norma EN 50110-1 o BGV A3:
Mettere fuori tensione
Impedire la reinserzione
Verificare l'assenza di tensione
Mettere a terra e cortocircuitare
Coprire o proteggere le parti adiacenti sotto tensione
Il consenso a lavorare sugli apparecchi elettrici deve avvenire solo a dispositivi spenti e
disinseriti. Collegare per primo il conduttore di protezione e scollegarlo per ultimo.
Tutti i circuiti elettrici devono soddisfare i requisiti dell'isolamento di protezione secondo
EN 61800-5-1.
142
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.2 Collegamenti elettrici
AVVERTENZA
Non smontare mai il blocco di connessione per i cavi del motore situato sul motore stesso
(cavi di potenza e del segnale).
Quest'operazione provoca danni irreversibili al motore.
I cavi del collegamento di potenza vengono fatti passare sul lato frontale dello statore (lato
B). Le estremità libere dei cavi vanno collegate a una morsettiera predisposta dal costruttore
della macchina. A tal fine deve essere disponibile uno spazio di installazione sufficiente nella
struttura degli assi. Da questa morsettiera conforme alla direttiva EMC (grado di protezione
minimo IP54) è possibile collegare al sistema di azionamento i cavi standard MOTION–
CONNECT previsti nel catalogo degli accessori.
8.2.1
Attacco di potenza
Assegnazione dei collegamenti
Tabella 8- 4
Collegamento di potenza nel funzionamento in parallelo
Convertitore
Motore Torque/statore
U2
U
V2
V
W2
W
Per il collegamento di potenza vedere anche le figure relative all'integrazione nel sistema nel
capitolo "Requisiti di sistema". Il senso di rotazione del rotore corrisponde al senso orario se
il motore Torque viene collegato con la sequenza delle fasi U, V, W. A questo proposito
vedere "Senso di rotazione" nel capitolo "Caratteristiche tecniche".
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
143
Interfacce
8.2 Collegamenti elettrici
8.2.2
Collegamento del segnale
Il collegamento del circuito di sorveglianza della temperatura senza modulo di protezione non è
ammesso.
PERICOLO
Pericolo di folgorazione!
I circuiti elettrici di Temp–S e Temp–F non sono certificati per la separazione elettrica sicura
secondo EN 61800-5-1 (ex isolamento elettrico sicuro secondo EN 50178 (VDE 0160)).
Il collegamento dei circuiti di sorveglianza della temperatura al Sensor Module SMC20 non
soddisfa i requisiti relativi alla separazione sicura secondo EN 61800-5-1. Questi circuiti
devono essere collegati tramite il modulo SME12x.
Collegamento dei sensori di temperatura
Il cavo del segnale viene collegato tramite un connettore al SME12x (Sensor Module
esterno), la cui uscita viene collegata al convertitore. A questo proposito vedere le figure
relative all'integrazione nel sistema nel capitolo "Requisiti di sistema" e il seguente schema
dei collegamenti.
0RWRUH7RUTXHLQWHJUDWR
):
:
JULJLR
37&r&37&r&
URVD
YHUGH
37&r&37&r& JLDOOR
60([
8
PDUURQH7HPS
.7<
ELDQFR7HPS
9DOXWD]LRQH
37&r&
37&r&
37&r&
H.7<
9
1RWD
37&FDUDWWHULVWLFDVHFRQGR',19'(SDUWH',1',1
9HULILFDUHODFRUUHWWDGLVLQVHU]LRQHGHOFLUFXLWRGLVJDQFLRFRQ60([SULPD
GLPHWWHUHLQVHUYL]LRLOPRWRUH
Figura 8-30
144
6,1$0,&66
Schema dei collegamenti con il modulo SME12x
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.2 Collegamenti elettrici
SME12x
Ai Sensor Module External 12x (SME120) possono essere collegati sistemi di misura diretti
all'esterno del quadro elettrico. Il modulo SME12x analizza questi sistemi di misura e
converte i valori calcolati in valori DRIVE-CLiQ.
Per ulteriori informazioni sui moduli SME12x, consultare il manuale dell'apparecchio
"SINAMICS S120 - Control Unit e componenti di sistema integrativi", disponibile su richiesta
presso la filiale Siemens di zona.
8.2.3
Schermatura, messa a terra ed equipotenzialità
Regole
La configurazione corretta e il collegamento delle schermature dei cavi e del conduttore di
protezione sono di grande importanza sia per la sicurezza delle persone, sia per l'influsso
dell'emissione dei disturbi e l'immunità alle interferenze. Attenersi perciò ai punti seguenti:
● Tutte le schermature dei cavi devono essere collegate con grande superficie di contatto,
mediante fascette o idonei dispositivi a morsetti o a vite, alle rispettive custodie.
● Non è ammissibile la messa in opera di solo pochi conduttori schermati o il
raggruppamento di conduttori schermati in un cavo.
● Per la connessione della schermatura del cavo di potenza sul modulo di potenza si
raccomandano i collegamenti di schermatura del sistema di azionamento.
● Rispettare la direttiva di installazione EMC del costruttore del convertitore, n. di
ordinazione 6FC5297-□AD30-0AP□.
PERICOLO
Pericolo di folgorazione!
I cavi non collegati conducono tensioni a causa dell'accoppiamento capacitivo.
I conduttori non collegati o non utilizzati, e in particolare i cavi elettrici a rischio di contatto,
devono essere isolati. L'isolamento deve resistere alla tensione nominale.
ATTENZIONE
Se i cavi non sono stati schermati, o si sono verificati errori di schermatura, è possibile che
si verifichino anomalie nell'azionamento (in particolare, nel sistema encoder) o il
malfunzionamento di altri apparecchi.
Prestare attenzione ai punti sopra menzionati.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
145
Interfacce
8.2 Collegamenti elettrici
ATTENZIONE
Correnti di dispersione elevate possono provocare danni agli altri apparecchi se il cavo di
protezione del motore non è collegato direttamente al modulo di potenza.
Collegare il conduttore di protezione (PE) del motore direttamente al modulo di potenza e
con un'ampia superficie di contatto.
ATTENZIONE
Nei motori Torque integrati 1FW6 con cavi di potenza con conduttori singoli senza
conduttore di terra è previsto un punto di collegamento per il conduttore di protezione (PE).
In questo punto deve essere collegato un conduttore di protezione separato per il
collegamento diretto al modulo di potenza.
8.2.4
Requisiti dei cavi di alimentazione del motore
Cavi di alimentazione del motore
La lunghezza del cavo di potenza e del cavo dei segnali tra motore e convertitore non deve
superare i 50 m.
ATTENZIONE
È necessario rispettare le accelerazioni ammesse per i cavi. Questo vale in particolare
quando i cavi vengono condotti attraverso un portacavi.
Per evitare l'usura, i cavi montati in modo fisso sul motore non devono essere instradati in
un portacavi, poiché in caso di danni non è possibile sostituirli.
A questo scopo vedere anche il capitolo "Integrazione nel sistema". Per i dati relativi ai cavi
di alimentazione del motore vedere la "Panoramica" e il Catalogo NC 61.
Per i cavi MOTION-CONNECT collegati alla morsettiera lato cliente o i prolungamenti per il
cavo di potenza e del segnale, vedere il Catalogo NC 61.
Specifica dei cavi di alimentazione del motore
I motori Torque integrati sono forniti con i cavi MOTION-CONNECT indicati nel Catalogo
NC 61, nel quale sono riportati anche i dati tecnici:
Cavo di potenza: MOTION-CONNECT 800, tipo 6FX8
Cavo di segnale: MOTION-CONNECT 700, tipo 6FX7
146
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.3 Collegamento del radiatore
8.3
Collegamento del radiatore
Collegamento del radiatore nei motori con camicia di raffreddamento
Il collegamento del radiatore nei motori con tipo di raffreddamento "a camicia" avviene grazie
alla struttura ad incasso. Le sezioni dei tubi dell'acqua di raffreddamento dipendono dalle
sezioni delle scanalature della camicia. Le scanalature della camicia vengono chiuse a
tenuta dall'involucro sul lato cliente e dagli O-ring.
In un motore Torque integrato con camicia di raffreddamento, il liquido di raffreddamento
deve fluire e defluire attraverso due fori previsti dall'utente nella struttura degli assi (vedere la
figura che segue). Per la tolleranza del foro di installazione, vedere il capitolo "Disegni di
montaggio / Disegni quotati".
Per ottenere un raffreddamento ottimale e uniforme in tutte le scanalature, per i motori
Torque 1FW609 e 1FW613 l'ingresso del liquido di raffreddamento deve essere sfalsato di
90° rispetto all'uscita cavi dell'alimentazione elettrica. Se per l'afflusso e il deflusso viene
scelto un altro punto, il liquido di raffreddamento si distribuisce nelle scanalature in modo
non uniforme. Il punto più sfavorevole per l'ingresso e l'uscita del liquido di raffreddamento è
a un angolo di 90° in senso antiorario: In questo caso la scanalatura più avanzata e quella
più arretrata non vengono quasi toccate dal liquido.
Per i motori Torque 1FW615, l'ingresso del liquido di raffreddamento deve trovarsi
direttamente sopra l'uscita cavi dell'alimentazione elettrica.
,QJUHVVR
5DIIUHGGDPHQWR
DGDFTXD
8VFLWD
,QYROXFURFOLHQWH
3XQWRGLXVFLWD
FDYL
2ULQJ
5RWRUH
6WDWRUH
7XWWHOHPLVXUHLQPP
r
)RURGLULIHULPHQWRURWRUH
Figura 8-31
Collegamento del radiatore nei motori 1FW609 e 1FW613 (esempio)
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
147
Interfacce
8.3 Collegamento del radiatore
,QYROXFURFOLHQWH
3XQWRGLXVFLWDGHLFDYL
2ULQJ
5RWRUH
8VFLWD
6WDWRUH
5DIIUHGGDPHQWR
DGDFTXD
,QJUHVVR
7XWWHOHPLVXUHLQPP
)RURGLULIHULPHQWR
URWRUH
Figura 8-32
Collegamento del radiatore nei motori 1FW615 (esempio)
Collegamento del radiatore nei motori con raffreddamento integrato
Per i motori Torque integrati con raffreddamento integrato non è necessario alcun
accorgimento costruttivo sulla struttura della macchina per il collegamento del sistema di
raffreddamento. Il collegamento del radiatore principale e del radiatore di precisione può
avvenire direttamente tramite raccorderie (filettatura 1/8" DIN 2999), che permettono di
alimentare e di disattivare separatamente ogni circuito di raffreddamento.
Nota
In caso di collegamento in serie occorre alimentare dapprima il radiatore di precisione, quindi
il radiatore principale.
Per il collegamento dei tubi flessibili è necessario disporre delle apposite raccorderie. Per il
montaggio delle raccorderie sono in genere sufficienti gli utensili standard.
Per il collegamento in parallelo del radiatore di precisione e del radiatore principale in un
gruppo di raffreddamento è disponibile un adattatore di allacciamento per refrigerante.
Questo componente deve essere ordinato separatamente poiché non fa parte della
dotazione di fornitura. Per ridurre la perdita di pressione si consiglia di collegare in parallelo il
radiatore di precisione e il radiatore principale immediatamente prima di effettuare i
collegamenti del radiatore.
L'adattatore di allacciamento per refrigerante può essere collegato esternamente in
posizione assiale o radiale tramite filettatura 1/4" (DIN 2999).
Le perdite di pressione dei singoli componenti di raffreddamento e dei tubi devono essere
verificate prima e confrontate con la potenza del dispositivo di raffreddamento.
148
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.3 Collegamento del radiatore
'LDPHWURLQWHUQRVWDWRUH
5DGLDWRUHGLSUHFLVLRQH
[*
SURIRQGLW¢
5DGLDWRUHSULQFLSDOH
[0SURIRQGLW¢
6WDWRUH
Figura 8-33
7XWWHOHPLVXUHLQPP
Piastra di collegamento del sistema di raffreddamento per i motori 1FW616, 1FW619 e 1FW623
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
149
Interfacce
8.3 Collegamento del radiatore
'LDPHWURLQWHUQRVWDWRUH
5DGLDWRUHGLSUHFLVLRQH
5DGLDWRUHSULQFLSDOH
[0SURIRQGLW¢
6WDWRUH
7XWWHOHPLVXUHLQPP
5DGLDWRUHGLSUHFLVLRQH[*SURIRQGLW¢
5DGLDWRUHSULQFLSDOH[*SURIRQGLW¢
Figura 8-34
Piastra di collegamento del sistema di raffreddamento per i motori 1FW629
AVVERTENZA
La piastra di collegamento del sistema di raffreddamento è montata in modo fisso.
Rimuovendo la piastra si può danneggiare il motore.
150
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.3 Collegamento del radiatore
7XWWHOHPLVXUHLQPP
$GDWWDWRUHGL
DOODFFLDPHQWR
UHIULJHUDQWH
6WDWRUH
'LDPHWURHVWHUQRVWDWRUH
8VFLWD
,QJUHVVR
3URIRQGLW¢GLDYYLWDPHQWRODWRFOLHQWH
* PP
'LDPHWURLQWHUQRVWDWRUH
7DSSRDYLWH
SUHPRQWDWR
9LWHDWHVWDFLOLQGULFD
,620[$
&RSSLDGLVHUUDJJLR
1P
Figura 8-35
Collegamento assiale del radiatore per i motori 1FW616, 1FW619 e 1FW623
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
151
Interfacce
8.3 Collegamento del radiatore
8VFLWD
,QJUHVVR
'LDPHWURHVWHUQRVWDWRUH
3URIRQGLW¢GLDYYLWDPHQWRODWRFOLHQWH
* PP
'LDPHWURLQWHUQRVWDWRUH
6WDWRUH
7DSSRDYLWH
SUHPRQWDWR
$GDWWDWRUHGL
DOODFFLDPHQWR
UHIULJHUDQWH
9LWHDWHVWDFLOLQGULFD
,620[$
&RSSLDGLVHUUDJJLR
1P
7XWWHOHPLVXUHLQPP
Figura 8-36
152
Collegamento assiale del radiatore per i motori 1FW629
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.3 Collegamento del radiatore
$GDWWDWRUHGL
DOODFFLDPHQWR
UHIULJHUDQWH
7XWWHOHPLVXUHLQPP
6WDWRUH
'LDPHWURHVWHUQRVWDWRUH
7DSSRDYLWHSUHPRQWDWR
3URIRQGLW¢GLDYYLWDPHQWRODWRFOLHQWH
* PP
8VFLWD
'LDPHWURLQWHUQRVWDWRUH
,QJUHVVR
9LWHDWHVWDFLOLQGULFD
,620[$
&RSSLDGLVHUUDJJLR
1P
Figura 8-37
Collegamento radiale esterno del radiatore per i motori 1FW616, 1FW619 e 1FW623
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
153
Interfacce
8.3 Collegamento del radiatore
7DSSRDYLWH
SUHPRQWDWR
'LDPHWURHVWHUQRVWDWRUH
'LDPHWURLQWHUQRVWDWRUH
3URIRQGLW¢GLDYYLWDPHQWRODWRFOLHQWH
* PP
8VFLWD
6WDWRUH
,QJUHVVR
$GDWWDWRUHGLDOODFFLDPHQWR
UHIULJHUDQWH
9LWHDWHVWDFLOLQGULFD
,620[$
&RSSLDGLVHUUDJJLR
1P
7XWWHOHPLVXUHLQPP
Figura 8-38
154
Collegamento radiale esterno del radiatore per i motori 1FW629
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.3 Collegamento del radiatore
5RWRUH
6WDWRUH
/DWRPRWRUH
5DGLDWRUH
SULQFLSDOH
5DGLDWRUHGL
SUHFLVLRQH
/DWRGLFROOHJDPHQWR
287
,1
'LVSRVLWLYRGLUDIIUHGGDPHQWR
FLUFXLWRGLUDIIUHGGDPHQWRFKLXVR
3PD[ EDU
RVFDPELDWRUHGLFDORUHDULDDFTXD
5DGLDWRUH
SULQFLSDOH
$GDWWDWRUHGLDOODFFLDPHQWRUHIULJHUDQWHSHUFROOHJDPHQWRSDUDOOHOR
GHOUDGLDWRUHSULQFLSDOHHGLTXHOORGLSUHFLVLRQH
(VHFX]LRQH$66,$/(5$',$/(
Figura 8-39
Adattatore di allacciamento per refrigerante per il collegamento parallelo di radiatore principale e radiatore di
precisione per i motori 1FW616, 1FW619, 1FW623 e 1FW629
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
155
Interfacce
8.3 Collegamento del radiatore
&ROOHJDPHQWRUDGLDWRUHUDGLDOH
9LWHGLILVVDJJLR
,620[$
&RSSLDGLVHUUDJJLR
1P
&ROOHJDPHQWRUDGLDWRUHDVVLDOH
/DVFHOWDWUDLOFROOHJDPHQWRUDGLDOHHTXHOOR
DVVLDOHGHOUDGLDWRUHVSHWWDDOFOLHQWH
JOL2ULQJOHYLWLGLFKLXVXUDHTXHOOHGLILVVDJJLR
IDQQRSDUWHGHOYROXPHGLIRUQLWXUD
2ULQJ
Figura 8-40
156
Adattatore di allacciamento per refrigerante per i motori 1FW616, 1FW619, 1FW623
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Interfacce
8.3 Collegamento del radiatore
&ROOHJDPHQWRUDGLDWRUHUDGLDOH
9LWHDWHVWDFLOLQGULFD
,620[$
&RSSLDGLVHUUDJJLR
1P
&ROOHJDPHQWRUDGLDWRUHDVVLDOH
2ULQJ
/DVFHOWDWUDLOFROOHJDPHQWRUDGLDOHHTXHOOR
DVVLDOHGHOUDGLDWRUHVSHWWDDOFOLHQWH
JOL2ULQJOHYLWLGLFKLXVXUDHTXHOOHGLILVVDJJLR
IDQQRSDUWHGHOYROXPHGLIRUQLWXUD
Figura 8-41
Adattatore di allacciamento per refrigerante per i motori 1FW629
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
157
Interfacce
8.3 Collegamento del radiatore
Tubi flessibili del sistema di raffreddamento
I tubi flessibili per il sistema di raffreddamento devono possedere una buona resistenza al
liquido refrigerante, flessibilità e resistenza all'abrasione. La selezione dei tubi flessibili per il
sistema di raffreddamento può avvenire solo una volta che si conoscono tutti i materiali e le
condizioni marginali relative al raffreddamento.
Se si impiega un adattatore di allacciamento per refrigerante per i motori con raffreddamento
integrato, non utilizzare tubi flessibili troppo sottili direttamente dopo l'adattatore, al fine di
evitare le perdite di pressione.
Per i nomi e gli indirizzi dei fornitori delle raccorderie e degli accessori per i sistemi di
raffreddamento consultare l'appendice.
ATTENZIONE
Non si assume alcuna responsabilità di garanzia per i prodotti di altri fornitori. Attenersi a
quanto espressamente specificato nel capitolo "Raccomandazioni del costruttore"
dell'appendice.
158
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Messa in servizio
9.1
9
Avvertenze di sicurezza relative alla messa in servizio
PERICOLO
Se viene messa in servizio una macchina che non soddisfa i requisiti di sicurezza vigenti,
sussiste il pericolo di morte, gravi lesioni alle persone e/o danni materiali.
Gli impianti e le macchine con motori a corrente trifase a bassa tensione alimentati da
convertitore devono soddisfare le finalità della protezione espresse nella direttiva EMC
2004/108/EG. L'esecuzione di un'installazione con conformità EMC ricade sotto la
responsabilità di chi realizza l'impianto. I cavi di potenza e i conduttori dei segnali devono
essere schermati. Rispettare la direttiva di installazione EMC del costruttore del
convertitore, n. di ordinazione 6FC5297-□AD30-0AP□.
PERICOLO
In caso di movimenti imprevisti del motore sussiste il pericolo di morte, gravi lesioni alle
persone e/o danni materiali.
Pericolo durante il funzionamento del rotore! Con la macchina in funzione, non operare mai
in prossimità delle parti rotanti.
Impedire che chiunque si avvicini alle parti rotanti e alle zone esposte al pericolo di
schiacciamento.
Verificare che la rotazione possa svolgersi senza impedimenti.
Verificare la commutazione prima di avviare il motore. Rispettare anche le istruzioni per la
messa in servizio del sistema di azionamento utilizzato.
Limitare le correnti del motore.
Impostare la limitazione del numero di giri a valori bassi.
Sorvegliare le posizioni finali.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
159
Messa in servizio
9.1 Avvertenze di sicurezza relative alla messa in servizio
AVVERTENZA
La temperatura superficiale dei motori può superare i 100 °C (212 °F). Pericolo di ustione!
Verificare la funzionalità del sistema di raffreddamento, se presente.
Non toccare il motore durante o immediatamente dopo l'uso.
Tutte le zone soggette a pericolo vanno contrassegnate nelle immediate vicinanze in modo
ben visibile dal pittogramma "Pericolo di superficie calda" (D-W026) .
I componenti sensibili alla temperatura (conduttori elettrici, componenti elettronici) non
devono aderire a superfici surriscaldate.
CAUTELA
Senza protezione termica il motore può surriscaldarsi e subire danni irreversibili.
Prima (!) della prima attivazione (di prova) verificare se la protezione termica è efficace.
AVVERTENZA
Durante il funzionamento del motore Torque il rotore non può superare la temperatura
massima di 120 °C; se questo avviene, sussiste il pericolo di smagnetizzazione dei magneti
permanenti.
Questa condizione va verificata alla prima messa in servizio tramite adeguati controlli.
In particolare occorre fare attenzione nel caso di carico di corrente non uniforme durante
l'arresto o il funzionamento con brevi movimenti circolari ciclici, in quanto possono
localmente verificarsi temperature elevate.
Impostazione della commutazione
PERICOLO
La mancata osservanza di queste avvertenze di sicurezza può provocare la morte, gravi
lesioni alle persone o danni materiali.
Attenersi strettamente alle avvertenze di sicurezza riportate nella presente
documentazione.
L'impostazione della commutazione necessaria per i motori sincroni può essere eseguita,
per i motori Torque 1FW6, per mezzo del procedimento automatico di identificazione della
posizione del rotore basato sul software.
160
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Messa in servizio
9.1 Avvertenze di sicurezza relative alla messa in servizio
I due seguenti procedimenti possono essere utilizzati con tutte le grandezze costruttive dei
motori Torque 1FW6:
● metodo basato sul movimento
● metodo basato sull'induttanza
Metodo basato sul movimento
Il metodo basato sul movimento per il sistema di azionamento SINAMICS S120 può essere
applicato a partire dalla versione software 2.4.
Questo procedimento può essere adottato anche a supporto della messa in servizio per
determinare la prima volta o per verificare l'offset dell'angolo di commutazione, in
abbinamento ad un sistema di misura assoluto (ad es. RCN 727 della Ditta Heidenhain).
Tale metodo può essere utilizzato per gli assi verticali e gli assi orizzontali, il cui carico può
ruotare verso il basso in modo incontrollato in assenza di corrente. In questo caso gli assi
non devono essere frenati, ma devono potersi muovere liberamente (attrito statico < 10 %
della coppia nominale del motore).
Con questo procedimento si possono verificare, in casi sfavorevoli, dei movimenti del rotore
nel campo di ± 5 gradi.
AVVERTENZA
Nel caso di assi inclinati e orizzontali, se il baricentro si trova all'esterno dell'asse rotante è
possibile che in assenza di corrente il carico ruoti verso il basso in modo incontrollato. In
alcuni casi non è possibile controllare l'angolo dell'asse.
Metodo basato sull'induttanza
Il metodo basato sull'induttanza per il sistema di azionamento SINAMICS S120 può essere
applicato a partire dalla versione software 2.4.
Questo procedimento non richiede il movimento del rotore e quindi può essere utilizzato
anche con gli assi frenati. Tuttavia, se gli assi non sono bloccati possono prodursi dei
movimenti. In funzione del tipo di struttura costruttiva, questo procedimento denota un livello
di rumorosità molto elevato all'inserzione dell'asse, durante l'identificazione dello stesso.
Nota
Per garantire un funzionamento preciso, il metodo basato sull'induttanza richiede una
sincronizzazione fine, ovvero un sistema di misura con tacca di zero analizzabile o un
sistema di misura assoluto.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
161
Messa in servizio
9.2 Procedura
Messa in servizio dei circuiti di raffreddamento
Prima di essere riempiti, i circuiti di raffreddamento devono essere lavati con il liquido di
raffreddamento.
ATTENZIONE
Non si può superare la pressione massima consentita (vedere "Caratteristiche tecniche").
9.2
Procedura
Verifiche per la messa in servizio in condizione di assenza di corrente
Circuito di raffreddamento
Accertarsi che il circuito di raffreddamento e il liquido di raffreddamento soddisfino i requisiti
specificati nel capitolo "Raffreddamento" del Manuale di progettazione dei motori Torque
integrati 1FW6 (PHB 1FW6) e che il circuito di raffreddamento funzioni correttamente.
Meccanica
● L'asse deve potersi muovere liberamente in tutto il campo di movimento.
● L'integrazione del motore e la posizione di montaggio dello statore e del rotore devono
rispettare i disegni di montaggio e i dati riportati nel Manuale di progettazione dei motori
1FW6.
● Per un "asse sospeso (squilibrio di grande entità)" deve essere eventualmente
predisposto un contrappeso di bilanciamento.
● Se è presente un freno, è necessario comandarlo correttamente.
● Se esiste una limitazione del campo di traslazione, devono essere predisposti e avvitati
saldamente dei finecorsa meccanici ad entrambe le estremità del percorso di movimento.
● I cavi movimentati devono essere correttamente posati in una catena portacavi.
Sistema di misura
● Sistema di misura incrementale:
Suddivisione del reticolo _ _ _ _ _ _ _ incr./ giro
Numero di tacche di zero _ _ _ _ _ _
OPPURE
● Sistema di misura assoluto (EnDat):
Suddivisione del reticolo _ _ _ _ _ _ _ incr. / giro
● Definire la direzione di rotazione positiva dell'azionamento:
impostare la direzione di conteggio positiva del sistema di misura.
Eventualmente invertire la direzione di rotazione.
162
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Messa in servizio
9.2 Procedura
Cablaggio
● Eseguire correttamente il collegamento con sequenza delle fasi U V W (campo rotante
destrorso) sul modulo di potenza.
● Il conduttore di protezione deve essere collegato.
● La schermatura deve essere collegata.
● L'analisi del sensore di temperatura deve svolgersi secondo le istruzioni fornite nel
capitolo "Protezione termica del motore" del Manuale di progettazione dei motori 1FW6. Il
collegamento del segnale è descritto nel capitolo "Integrazione nel sistema" e
"Interfacce".
Cavo del sistema di misura
Accertarsi che il cavo del sistema di misura sia collegato correttamente; a questo proposito
vedere il capitolo "Integrazione nel sistema" del Manuale di progettazione dei motori 1FW6.
Ulteriori verifiche per la messa in servizio
● Accertarsi che il sensore di temperatura esegua correttamente l'analisi.
● Determinazione del senso di regolazione:
il senso di regolazione di un asse è corretto se la direzione positiva dell'azionamento
(campo rotante destrorso nella sequenza delle fasi U, V, W) concorda con la direzione di
conteggio positiva del sistema di misura.
Nota
I dati per la determinazione della direzione dell'azionamento valgono solo per i motori
1FW6.
Se la direzione positiva dell'azionamento e la direzione positiva di conteggio del sistema
di misura non concordano, bisogna invertire nel software il valore reale del numero di giri
durante la messa in servizio.
Il senso di regolazione può anche essere verificato in questo modo: per prima cosa
eseguire la parametrizzazione dell'azionamento, quindi con abilitazione bloccata eseguire
il movimento in manuale.
Se l'asse viene spostato in direzione positiva, anche il valore reale del numero di giri
deve essere positivo.
● Determinazione della direzione dell'azionamento:
per la determinazione del senso di rotazione del motore 1FW6 vedere il capitolo
"Caratteristiche tecniche" del Manuale di progettazione dei motori 1FW6. La direzione del
motore 1FW6 è positiva quando il rotore ruota in senso orario dal punto di vista della
direzione della freccia.
● Determinazione della direzione di conteggio del sistema di misura:
la direzione di conteggio del sistema di misura può essere determinata manualmente
(con abilitazioni bloccate). In questo caso tenere conto delle inversioni parametrizzate.
Immissione dei dati del motore
Selezionare i numeri di ordinazione (MLFB) del motore utilizzato nell'elenco fornito dal tool di
messa in servizio. I dati del motore vengono acquisiti automaticamente. I dati relativi ai
motori non inclusi nell'elenco devono essere immessi manualmente. Per i motori Siemens è
possibile richiedere un foglio dati con i valori di impostazione del convertitore presso la filiale
Siemens di competenza.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
163
Funzionamento
10.1
10
Avvertenze di sicurezza per il funzionamento
PERICOLO
Le parti di macchine azionate da motori Torque rappresentano, a causa del numero di giri e
dell'accelerazione estremamente elevati, nonché del ridotto attrito e autobloccaggio, un
serio pericolo di lesioni, ad es. da schiacciamento.
Impedire che chiunque si avvicini alle parti in movimento e alle zone degli assi esposte al
pericolo di schiacciamento.
AVVERTENZA
Un funzionamento non corretto può provocare danni materiali di grande entità.
L'esercizio è ammesso solo in luoghi dotati di una completa protezione da intemperie:
L'ambiente deve essere asciutto e protetto dagli eccessi di caldo e di freddo.
Nel vano motore non devono penetrare corpi estranei (trucioli, particelle, liquidi, oli, viti,
utensili, ecc.).
Garantire la funzione del sistema di raffreddamento del motore Torque.
10.2
Gestione delle anomalie
Tenere sotto controllo la rumorosità. In caso di anomalie contattare la filiale Siemens.
In caso di problemi di precisione del pezzo occorre verificare, tra l'altro, l'accessibilità del
rotore e l'assorbimento di corrente della macchina. I problemi di precisione possono anche
avere altre cause, ad es. la struttura della macchina.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
165
Manutenzione e riparazione
11.1
11
Avvertenze di sicurezza relative alla manutenzione e alla riparazione
PERICOLO
Se gli interventi di manutenzione e di riparazione sono eseguiti da personale inesperto,
sussiste il pericolo di morte, lesioni alle persone e/o danni materiali.
È necessario sincerarsi che il personale possieda le necessarie conoscenze e capacità,
atte ad eseguire senza rischi i lavori di manutenzione.
Tutti i lavori di riparazione vanno affidati a un centro di assistenza Siemens. Per gli indirizzi
dei centri di assistenza Siemens vedere
http://www.automation.siemens.com/partner/index.asp.
PERICOLO
Se si eseguono interventi sulla macchina in funzione, sussiste il pericolo di morte, gravi
lesioni alle persone e/o danni materiali. Prima di eseguire operazioni in prossimità delle
parti rotanti, accertarsi che la macchina non sia sotto tensione ed eventualmente
disinserirla.
Prima di operare in prossimità delle parti rotanti, togliere sempre la corrente/tensione alla
macchina in modo sicuro per evitare movimenti di rotazione accidentali.
PERICOLO
Se subito dopo il funzionamento del motore vengono effettuati dei lavori sullo stesso, il
contatto con le superfici surriscaldate può provocare un pericolo di combustione. La
temperatura dell'acqua di raffreddamento può aumentare ancora quando il motore è già
disinserito.
Per raffreddare il motore riportandolo al livello della temperatura di mandata TVORL, il
raffreddamento deve funzionare per almeno 30 minuti dopo la disinserzione del motore. Se
invece il raffreddamento è disattivato, occorre molto più tempo prima che il motore si
raffreddi. Molto dipende da come il motore è installato.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
167
Manutenzione e riparazione
11.1 Avvertenze di sicurezza relative alla manutenzione e alla riparazione
PERICOLO
Pericolo di ustione!
Pericolo di colpi di ariete: non attivare il raffreddamento se prima il motore ha funzionato
senza. L'intensa formazione di vapore può provocare combustioni e la distruzione del
motore.
La disattivazione del raffreddamento può provocare un pericolo di combustione a causa
dell'uscita di acqua surriscaldata e vapore. Se il motore viene fatto funzionare senza
raffreddamento, si surriscalda l'acqua che si trova nel sistema di raffreddamento.
Disattivare il raffreddamento solo quando il motore è raffreddato.
PERICOLO
Se si eseguono interventi di smontaggio sussiste il pericolo di morte, gravi lesioni alle
persone e/o danni materiali.
Durante i lavori di smontaggio vanno rispettate le indicazioni contenute nella sezione "Note
sul montaggio dei motori Torque integrati".
AVVERTENZA
Gli spigoli vivi possono provocare ferite da taglio e la caduta di oggetti può provocare
lesioni ai piedi.
Indossare guanti da lavoro e calzature di sicurezza.
168
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Manutenzione e riparazione
11.2 Avvertenze di sicurezza relative alla prova ad alta tensione
11.2
Avvertenze di sicurezza relative alla prova ad alta tensione
Avvertenze relative alla verifica della resistenza d'isolamento (prova ad alta tensione)
AVVERTENZA
Testando con l'alta tensione la resistenza d'isolamento è possibile danneggiare
l'isolamento dei motori.
Se su una macchina o un impianto con azionamenti diretti, o direttamente sui motori, si
devono effettuare prove della resistenza d'isolamento (ad es. prova d'installazione,
manutenzione preventiva, ricerca di errori), è ammesso utilizzare a questo scopo
esclusivamente dispositivi di prova a norma EN 61557-1, EN 61557-2 e EN 61010-1 (o
normative IEC corrispondenti).
La prova può avvenire esclusivamente con una tensione continua di max. 1000 V per max.
60 secondi. La tensione di prova deve essere misurata verso terra o verso la carcassa del
motore. Se per la prova della macchina o dell'impianto è necessaria una tensione continua
o alternata più elevata, occorre concordare tale prova con la filiale Siemens di competenza.
Rispettare le istruzioni per l'uso del dispositivo di prova.
Le prove della resistenza d'isolamento sui singoli motori possono essere eseguite
esclusivamente come segue:
1. Collegare tra loro tutte le connessioni degli avvolgimenti e dei sensori di temperatura;
prova con max. DC 1000 V, 60 s, connettore PE.
2. Collegare alla connettore PE tutte le connessioni dei sensori di temperatura, e tra di loro
tutte le connessioni degli avvolgimenti; prova con max. DC 1000 V, 60 s, avvolgimento
contro connettore PE.
La resistenza d'isolamento deve essere almeno di 10 MΩ, altrimenti l'isolamento del motore
si danneggia.
11.3
Interventi di manutenzione
Lavori di manutenzione sul motore
AVVERTENZA
Attenersi strettamente alle avvertenze di sicurezza riportate nella presente
documentazione.
Per via del loro funzionamento, i motori Torque sono in linea di massima esenti da usura.
Per garantire il funzionamento e impedire l'usura del motore, è necessario eseguire i
seguenti interventi di manutenzione:
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
169
Manutenzione e riparazione
11.4 Cicli di prova e di sostituzione del liquido di raffreddamento
● Verificare regolarmente l'accessibilità dell'asse rotante
● Tenere libero il traferro da trucioli e particelle
● Controllare regolarmente lo stato generale dei componenti del motore
● Controllare l'assorbimento di corrente nel ciclo di prova definito in precedenza
Dal vano motore occorre tenere lontano imbrattamenti come ad esempio trucioli, olii ecc.. A
seconda del grado di sporcizia locale, eseguire una pulizia per garantire un funzionamento
ottimale e una dissipazione di calore sufficiente.
Verificare l'assenza di danni e usura dei cavi. Le apparecchiature elettriche con cavi
danneggiati non devono essere utilizzate.
Controllare che i pressacavi siano montati saldamente.
Intervalli di manutenzione
Dato che le condizioni operative sono molto diverse, non è possibile stabilire degli intervalli
fissi per gli interventi di manutenzione.
Segnali della necessità di eseguire interventi di manutenzione
● Sporcizia nel vano motore
● Peculiarità visibili nel funzionamento della macchina
● Peculiarità udibili nel funzionamento della macchina
● Problemi di precisione di posizionamento
● Maggior consumo di corrente
11.4
Cicli di prova e di sostituzione del liquido di raffreddamento
Cicli di prova e di sostituzione del liquido di raffreddamento
I cicli di prova e di sostituzione del liquido di raffreddamento devono essere concordati con il
costruttore del dispositivo di raffreddamento e con il produttore dell'anticorrosivo.
170
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Immagazzinaggio e trasporto
12.1
12
Avvertenze per l'imballaggio, l'immagazzinaggio e il trasporto
Accertarsi che durante l'imballaggio, il disimballaggio e il trasporto dei motori Torque o dei
rotori non sorgano pericoli dovuti ai campi magnetici elevati dei rotori; vedere anche la
sezione "Pericoli dovuti ai campi magnetici elevati".
PERICOLO
Se l'imballaggio, l'immagazzinaggio e/o il trasporto vengono effettuati in modo non
adeguato, sussiste il pericolo di morte, danni a persone e/o a cose.
Il personale deve conoscere e rispettare le avvertenze di sicurezza per l'immagazzinaggio
e il trasporto.
Durante il trasporto di macchine o parti di macchina, bloccare gli assi rotanti, poiché non
esiste un bloccaggio automatico contro la rotazione accidentale.
Pericolo durante le operazioni di sollevamento e trasporto!
Un'installazione non corretta, un'apparecchiatura o mezzi di supporto non idonei o difettosi
possono causare lesioni personali e/o danni materiali.
I dispositivi di sollevamento, i carrelli per trasporti interni e i dispositivi di presa del carico
devono essere conformi alle prescrizioni.
Per il trasporto aereo è necessario rispettare le direttive IATA.
I luoghi di immagazzinaggio dei rotori vanno contrassegnati con adeguate indicazioni di
pericolo (pittogrammi) indicati nelle tabelle del capitolo "Applicazione di segnali di pericolo e
di divieto".
I luoghi di immagazzinaggio vanno mantenuti asciutti e protetti dagli eccessi di caldo e di
freddo.
Rispettare le segnalazioni apposte sull'imballaggio.
Indossare calzature di sicurezza e guanti da lavoro.
Rispettare i limiti relativi al sollevamento e alla movimentazione per il personale addetto. I
motori e i relativi componenti possono pesare più di 13 kg.
Non immagazzinare né trasportare i motori Torque integrati e i rotori senza imballaggio.
Utilizzare esclusivamente un imballaggio originale non danneggiato.
Gli imballaggi danneggiati vanno immediatamente sostituiti. Un imballaggio inidoneo del
rotore non offre alcuna protezione dalle forze di attrazione che si manifestano
repentinamente nelle immediate vicinanze del rotore stesso. Inoltre, durante
l'immagazzinaggio e lo spostamento del rotore si possono verificare pericolosi movimenti
propri.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
171
Immagazzinaggio e trasporto
12.2 Avvertenza di sicurezza per i dispositivi di sollevamento
Nota
Conservare il più a lungo possibile l'imballaggio dei motori Torque e dei rotori. Gli imballaggi
originali possono anche essere richiesti alla filiale Siemens di competenza.
PERICOLO
Pericolo di ribaltamento! Se si impilano l'uno sull'altro troppi motori, statori e rotori, sussiste
il pericolo di morte, gravi lesioni alle persone e/o danni materiali.
Non è consentito impilare troppi motori, statori e rotori imballati o non imballati.
Immagazzinare e trasportare i motori e gli statori solo in posizione orizzontale.
Rispettare le avvertenze e le indicazioni di manipolazione apposte sull'imballaggio.
12.2
Avvertenza di sicurezza per i dispositivi di sollevamento
AVVERTENZA
L'impiego non conforme dei dispositivi di sollevamento può provocare la deformazione
plastica del motore.
Per il sollevamento del motore (o statore/rotore) sono necessari almeno tre occhielli di
sollevamento, che vanno avvitati in modo reciprocamente simmetrico nei fori filettati del
motore (o statore/rotore) posto orizzontalmente.
I motori (o statori/rotori) devono essere sollevati solo in posizione orizzontale. Le funi di
sollevamento devono avere la stessa lunghezza. Le funi di sollevamento in tensione
devono formare un angolo di almeno 50 ° tra fune e motore (o statore/rotore).
172
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Compatibilità ambientale
13.1
13
Compatibilità ambientale nella produzione
● Non sono necessari trasporti di merci pericolose.
● Il materiale di imballaggio consiste quasi esclusivamente di cartone.
● Il consumo energetico nella fase di produzione è stato ottimizzato.
● La produzione è esente da emissioni.
13.2
Smaltimento
Per lo smaltimento devono essere rispettate le normative nazionali e locali relative al
processo di trattamento dei materiali.
13.2.1
Avvertenze relative allo smaltimento
PERICOLO
Lo smaltimento scorretto di azionamenti diretti o relativi componenti (in particolare di
componenti con magneti permanenti) comporta il pericolo di morte, gravi lesioni alle
persone e/o danni materiali.
Gli azionamenti diretti e i relativi componenti devono essere smaltiti in modo corretto.
Fasi principali di uno smaltimento corretto
● Smagnetizzazione completa di componenti che contengono magneti permanenti
● Separare i componenti per il riciclaggio nelle seguenti categorie:
– rottami elettronici (ad es. elettronica del trasduttore, moduli sensori)
– rottami elettronici (ad es. pacchi di lamierini, avvolgimenti di motori, conduttori)
– rottami ferrosi
– alluminio
– materiali isolanti
● Non miscelare con solvente, detergenti a freddo o residui di vernice
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
173
Compatibilità ambientale
13.2 Smaltimento
13.2.2
Smaltimento di rotori 1FW6
Smaltimento e smagnetizzazione di rotori 1FW6
I rotori con magnete devono essere sottoposti a un processo di smaltimento termico speciale
che permette di evitare qualsiasi rischio durante o dopo lo smaltimento. Per questo motivo lo
smaltimento deve essere effettuato da un'impresa specializzata.
Dopo Io smontaggio dei motori i rotori devono essere imballati nelle singole confezioni
originali intatte.
PERICOLO
I rotori non imballati possono provocare danni a persone e cose per via dei forti campi
magnetici.
Attenersi strettamente alle istruzioni del capitolo "Avvertenze di sicurezza" della presente
documentazione.
Smagnetizzazione dei rotori
Le imprese di smaltimento specializzate in smagnetizzazione utilizzano uno speciale forno di
smaltimento. Le parti interne del forno di smaltimento sono costituite da materiale non
magnetico.
I rotori vengono posti in un contenitore rigido resistente alla temperatura (ad es. pallet a
sponde grigliate) in materiale non magnetico, inseriti nel forno e qui lasciati per tutto il
processo di smagnetizzazione. La temperatura nel forno deve essere di almeno 300°C per
un tempo di permanenza di almeno 30 min.
Le eventuali emissioni gassose devono essere captate e rese innocue senza danni per
l'ambiente.
13.2.3
Smaltimento dell'imballaggio
Gli imballaggi e i materiali ausiliari di imballaggio utilizzati non contengono sostanze che
possono causare problemi all'ambiente. Ad eccezione del legno, sono riciclabili e in generale
devono quindi essere destinati al riciclaggio. Il legno deve essere destinato allo sfruttamento
termico.
Come materiali ausiliari di imballaggio vengono utilizzate solo materie plastiche riciclabili:
● Codice 02 PE-HD (polietilene)
● Codice 04 PE-LD (polietilene)
● Codice 05 PP (polipropilene)
● Codice 04 PS (polistirolo)
174
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14
In questo capitolo sono indicati i dati tecnici e le curve caratteristiche dei motori Torque
integrati 1FW6. Questa raccolta di dati contiene i dati del motore necessari per la
progettazione e una serie di dati aggiuntivi per calcoli più approfonditi nell'ambito di
considerazioni dettagliate e analisi di problemi. I dati qui riportati possono subire modifiche.
Nota
I dati specifici del sistema si riferiscono alla combinazione di motori Torque integrati 1FW6
con sistemi di azionamento SINAMICS S120.
Salvo specificato diversamente, per i dati valgono le seguenti condizioni marginali:
La tensione del circuito intermedio UZK è pari a 600 V, la tensione di uscita del
convertitore Uamax è pari a 425 V.
Il motore è raffreddato ad acqua con il flusso volumetrico minimo consigliato secondo
specifica e una temperatura di mandata TVORL di 35 °C.
La temperatura nominale dell'avvolgimento del motore TN è pari a 130 °C.
Le tensioni e le correnti sono indicate in valori effettivi.
Altitudine di installazione dei motori fino a 4000 m s.l.m.
Per i motori con raffreddamento integrato, i dati di potenza sono stati calcolati utilizzando
un adattatore di allacciamento per refrigerante
14.1
Spiegazioni dei simboli della formula
Contenuto del foglio dati
I dati contenuti nei fogli dati sono spiegati di seguito e si suddividono nel seguente modo:
● Condizioni marginali
● Dati nel punto di misura
● Dati limite
● Costanti fisiche
● Dati del radiatore del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
175
Dati tecnici e curve caratteristiche
14.1 Spiegazioni dei simboli della formula
Condizioni marginali
UZK
tensione di circuito intermedio del convertitore (valore di tensione continua).
Nota: per tensioni di uscita del convertitore Uamax vedere "Requisiti di sistema".
TVORL
Temperatura di mandata massima dell'acqua di raffreddamento del radiatore
principale e del radiatore di precisione quando il motore deve essere utilizzato
fino alla forza nominale MN. Dipendenza della corrente permanente del motore
dalla temperatura di mandata del raffreddamento dell'acqua, vedere la curva
caratteristica "Raffreddamento".
TN
Temperatura nominale dell'avvolgimento.
MN
Coppia nominale del motore.
Dati nominali
IN
Corrente nominale del motore con la coppia nominale MN.
nMAX,MN
Numero di giri massimo fino al quale il motore può fornire la coppia nominale
MN .
PV,N
Potenza dissipata del motore nel punto di misura (MN,nMAX,MN) alla temperatura
nominale TN.
MMAX
Coppia massima del motore.
IMAX
Corrente massima del motore alla coppia massima MMAX. Per la durata di
carico massima possibile vedere "Funzionamento temporaneo S2".
PEL,MAX
Potenza elettrica assorbita del motore nel punto (MMAX,nMAX,MMAX) alla
temperatura nominale TN.
Dati limite
Nota
La somma di potenza meccanica erogata Pmech e potenza dissipata PV fornisce la potenza
elettrica assorbita dal motore PEL.
A questo proposito vedere anche "Calcolo dell'alimentazione necessaria".
La potenza nominale elettrica assorbita del motore nel punto nominale con M = MN e
n = nMAX,MN si calcola come segue:
PEL,N = Pmech,N + PV,N = 2π ∙ MN ∙ nMAX,MN + 3 ∙ R130 ∙ I02
Le perdite dovute all'attrito e alle correnti parassite sono considerate utilizzando per il
calcolo, anziché IN, la corrente più elevata I0.
176
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.1 Spiegazioni dei simboli della formula
nMAX,MMAX
Numero di giri massimo fino al quale il motore può fornire la coppia massima
MMAX.
nMAX,0
numero di giri a vuoto; numero di giri massimo senza carico.
M0
Coppia per il numero di giri n = 1 [1/min] alla quale è ancora garantita una
distribuzione uniforme del carico e della potenza dissipata su tutti e tre i rami
del motore.
I0
Corrente (valore effettivo) del motore con coppia con M0 e numero di giri n = 1
[1/min].
M0*
Coppia da fermo termica del motore, se non vengono caricati uniformemente
con corrente tutti e tre i rami del motore. Il carico di corrente non uniforme
prevale nei seguenti modi operativi:
Condizione di fermo
funzionamento con brevi movimenti di rotazione ciclici (passo polare < 1)
per n << 1 [1/min]
Poiché per la corrente nominale l'influsso della saturazione può essere
trascurato, vale quanto segue:
I0*
Corrente da fermo termica (valore effettivo) del motore con M0*. Vale quanto
segue:
Costanti fisiche
kT,20
Costante di coppia del motore con una temperatura del rotore di 20 °C (si
riferisce al campo lineare inferiore della curva caratteristica coppia-corrente).
kE
Costante di tensione per il calcolo della tensione concatenata controindotta.
kM,20
Costante del motore con una temperatura dell'avvolgimento di T = 20 °C.
La costante del motore kM(T) può essere calcolata per altre temperature:
kM(T) = kM,20 ∙ [1 + α(T – 20 °C)]
con il coefficiente di temperatura α = − 0,001 1/K per i magneti
kM(T) = kM,20 ∙ [1 - 0,001 ∙ (T – 20 °C)]
tTH
Costante di tempo termica dell'avvolgimento del motore. È data dall'andamento
della temperatura nell'avvolgimento in caso di carico intermittente con corrente
costante; vedere la seguente figura. Una volta trascorso il tempo tTH
l'avvolgimento del motore raggiunge circa il 63 % della temperatura finale TLIM, se
non interviene prima la protezione termica.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
177
Dati tecnici e curve caratteristiche
14.1 Spiegazioni dei simboli della formula
7HPSHUDWXUD7
, FRQVW
7HPSRW
Figura 14-1
178
Costante di tempo termica
P
Numero di coppie di poli del motore.
MCOG
Coppia di riposo (cogging torque). È la coppia prodotta dall'interazione tra il
pacco di lamierini e i magneti permanenti nel traferro quando lo statore non è
sotto tensione.
ms
Massa dello statore senza viti di fissaggio, connettori, cavi di collegamento e
liquido di raffreddamento.
mL
Massa del rotore senza viti di fissaggio.
JL
Momento d'inerzia del rotore.
RSTR,20
Resistenza di linea dell'avvolgimento con una temperatura di 20°C.
Il valore della resistenza di linea è necessario anche per il calcolo della potenza
dissipata. Il ricalcolo di R20 sulle altre resistenze di linea può essere effettuato
come segue:
RSTR(T) = RSTR,20 ∙ [1 + α(T – 20°C)]
con il coefficiente di temperatura α = 0,00393 ∙ 1/K per il rame.
Per RSTR,130 vale: RSTR,130 = RSTR,20 ∙ 1,4323.
LSTR
Induttanza di linea dell'avvolgimento dello statore con rotore integrato.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.1 Spiegazioni dei simboli della formula
Dati del radiatore principale del motore
QH,MAX
Potenza termica massima dissipata dal radiatore principale sfruttando il motore
fino alla coppia nominale MN e alla temperatura nominale TN
Flusso volumetrico minimo consigliato nel radiatore principale per il
raggiungimento della coppia nominale MN.
H,MIN
L'aumento di temperatura del liquido di raffreddamento tra il tubo di mandata e il
tubo di ritorno del radiatore principale nel punto di funzionamento QH,MAX e H,MIN
viene stimato con la seguente formula:
ΔTH
densità media dell'acqua: ρ = 1000 kg/m3
capacità calorifica media specifica dell'acqua: cp = 4,18 · 103 J/(kg K)
Aumento di temperatura rispetto alla temperatura di mandata: ΔTH in K
Flusso volumetrico: in m3/s
˂7LQ.
,QFUHPHQWRGLWHPSHUDWXUDGHOUHIULJHUDQWHFRQ
IOXVVRYROXPHWULFRPLQLPRFRQVLJOLDWRGDOIRJOLRGDWL
9LQOPLQ
Figura 14-2
ΔpH
Esempio di curva caratteristica "Aumento di temperatura del liquido di raffreddamento tra
il tubo di mandata e il tubo di ritorno del radiatore principale"
Caduta di pressione del liquido di raffreddamento tra il tubo di mandata e il tubo
di ritorno del radiatore principale con flusso volumetrico H,MIN.
Per i motori con raffreddamento integrato è previsto il collegamento in parallelo
del radiatore principale e del radiatore di precisione. La somma dei flussi
volumetrici del radiatore principale e del radiatore di precisione fornisce il flusso
volumetrico totale; la caduta di pressione nel radiatore principale ΔpH corrisponde
alla caduta di pressione nel radiatore di precisione ΔpP.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
179
Dati tecnici e curve caratteristiche
14.1 Spiegazioni dei simboli della formula
˂SLQEDU
&DGXWDGLSUHVVLRQHDOIOXVVR
YROXPHWULFRPLQLPRFRQVLJOLDWRGDOIRJOLRGDWL
9LQOPLQ
Figura 14-3
Esempio di curva caratteristica "Perdite di pressione nel radiatore principale - flusso
volumetrico"
Dati del radiatore di precisione del motore
QP,MAX
Potenza termica massima dissipata dal radiatore di precisione sfruttando il
motore fino alla coppia nominale MN e alla temperatura nominale TN.
Flusso volumetrico minimo consigliato nel radiatore di precisione per
l'ottenimento di un aumento di temperatura minimo sulle superfici di montaggio
dello statore rispetto a TVORL.
P,MIN
L'aumento di temperatura del liquido di raffreddamento tra il tubo di mandata e il
tubo di ritorno del radiatore di precisione nel punto di funzionamento QP,MAX e
P,MIN viene stimato con la seguente formula:
ΔTp
densità media dell'acqua: ρ = 1000 kg/m3
capacità calorifica media specifica dell'acqua: cp = 4,18 · 103 J/(kg K)
Aumento di temperatura rispetto alla temperatura di mandata: ΔTP in K
Flusso volumetrico: in m3/s
˂7LQ.
,QFUHPHQWRGLWHPSHUDWXUDGHOUHIULJHUDQWHFRQ
IOXVVRYROXPHWULFRPLQLPRFRQVLJOLDWRGDOIRJOLRGDWL
9LQOPLQ
Figura 14-4
180
Esempio di curva caratteristica "Aumento di temperatura del liquido di raffreddamento tra
il tubo di mandata e il tubo di ritorno del radiatore di precisione"
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.1 Spiegazioni dei simboli della formula
Diagramma coppia/numero di giri
Il cerchio raffigurato sull'asse della coppia nella seguente figura indica M*0.
I motori descritti sono multipolari e hanno una costante di tempo termica sufficientemente
elevata. Di conseguenza, è possibile ottenere la coppia M0 anche con numeri di giri molto
ridotti.
I diagrammi coppia/numero di giri relativi ai motori sono riportati nel capitolo "Dati tecnici e
curve caratteristiche".
)XQ]LRQDPHQWR6
RIXQ]LRQDPHQWR6
&DUDWWHULVWLFDOLPLWH
GHOODWHQVLRQH
)XQ]LRQDPHQWR6
Q >PLQ@
Figura 14-5
Descrizione di un diagramma coppia/numero di giri (esempio)
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
181
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2
Fogli dati e diagrammi
14.2.1
1FW6090-xxxxx-xxxx
Foglio dati 1FW6090-xxB05-xxxx
Tabella 14- 1 1FW6090-xxB05-0Fxx, 1FW6090-xxB05-0Kxx
Dati tecnici
1FW6090
Sigla
identificativa
Unità
-xxB05-0Fxx
-xxB05-0Kxx
Tensioni del circuito intermedio
UZK
Temperatura di mandata del raffreddamento ad
acqua
TVORL
V
600
600
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
113
109
Corrente nominale
IN
A
5,6
7,4
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
140
250
Potenza dissipata nominale
PV,N
kW
2,19
2,12
Coppia massima
MMAX
Nm
179
179
Corrente massima
IMAX
A
9,5
13
Condizioni marginali
Dati nel punto di misura
Dati limite
Potenza elettrica del motore con MMAX
PEL,MAX
kW
6,55
8,12
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
46
140
Numero di giri a vuoto
nMAX,0
giri/min
310
430
Coppia con n = 1 [1/min]
M0
Nm
119
119
Corrente con M0 e n = 1 [1/min]
I0
A
5,9
8,2
Coppia da fermo termica
M0*
Nm
84,1
84,1
Corrente da fermo termica
I 0*
A
4,1
5,6
Costanti fisiche
Costante di coppia a 20 °C
kT,20
Nm/A
20,8
15
Costante di tensione
kE
V/(1000/
min)
1258
906,2
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
2,64
2,68
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
22
22
Coppia di riposo
MCOG
Nm
1,2
1,2
Massa dello statore
mS
kg
6,6
6,6
Massa del rotore
mL
kg
2,6
2,6
Momento d'inerzia del rotore
JL
10-2 kgm2
1,52
1,52
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
14,9
7,5
182
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6090
Sigla
identificativa
Unità
-xxB05-0Fxx
-xxB05-0Kxx
Induttanza di linea dell'avvolgimento
LSTR
mH
47,1
24,4
QH,MAX
kW
1,82
1,76
l/min
3,4
3,4
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
7,7
7,5
Caduta di pressione
ΔpH
bar
0,2
0,2
Curve caratteristiche dei motori 1FW6090-xxx05-xxxx
):[[%.[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%)[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
183
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6090-xxB07-xxxx
Tabella 14- 2 1FW6090-xxB07-0Kxx, 1FW6090-xxB07-1Jxx
Dati tecnici
1FW6090
Sigla
identificativa
Unità
-xxB07-0Kxx
-xxB07-1Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
154
142
Corrente nominale
IN
A
9,5
13
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
220
430
Potenza dissipata nominale
PV,N
kW
2,69
2,67
Coppia massima
MMAX
Nm
251
251
Corrente massima
IMAX
A
16
26
Potenza elettrica del motore con MMAX
PEL,MAX
kW
10,3
14,1
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
120
270
Numero di giri a vuoto
nMAX,0
giri/min
390
620
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
166
166
Corrente con M0 e n = 1 [1/min]
I0
A
10
16
Coppia da fermo termica
M0*
Nm
118
118
Corrente da fermo termica
I 0*
A
7,1
11
Costante di coppia a 20 °C
kT,20
Nm/A
16,6
10,5
Costante di tensione
kE
V/(1000/
min)
1007
634,3
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
3,33
3,34
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
22
22
Coppia di riposo
MCOG
Nm
1,7
1,7
Costanti fisiche
Massa dello statore
mS
kg
8,6
8,6
Massa del rotore
mL
kg
3,6
3,6
Momento d'inerzia del rotore
JL
10-2 kgm2
2,2
2,2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
5,98
2,36
Induttanza di linea dell'avvolgimento
LSTR
mH
21,2
8,4
QH,MAX
kW
2,24
2,22
l/min
4,1
4,1
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
7,8
7,8
Caduta di pressione
ΔpH
bar
0,2
0,2
184
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6090-xxx07-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%.[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
185
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6090-xxB10-xxxx
Tabella 14- 3 1FW6090-xxB10-0Kxx, 1FW6090-xxB10-1Jxx
Dati tecnici
1FW6090
Sigla
identificativa
Unità
-xxB10-0Kxx
-xxB10-1Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
231
216
Corrente nominale
IN
A
7,9
14
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
82
270
Potenza dissipata nominale
PV,N
kW
3,5
3,5
Coppia massima
MMAX
Nm
358
358
Corrente massima
IMAX
A
13
26
Potenza elettrica del motore con MMAX
PEL,MAX
kW
9,43
15,3
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
8,7
170
Numero di giri a vuoto
nMAX,0
giri/min
220
430
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
238
238
Corrente con M0 e n = 1 [1/min]
I0
A
8,2
16
Coppia da fermo termica
M0*
Nm
168
168
Corrente da fermo termica
I 0*
A
5,6
11
Costante di coppia a 20 °C
kT,20
Nm/A
30
15
Costante di tensione
kE
V/(1000/
min)
1812
906,2
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
4,17
4,17
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
22
22
Coppia di riposo
MCOG
Nm
2,4
2,4
Costanti fisiche
Massa dello statore
mS
kg
12,1
12,1
Massa del rotore
mL
kg
5,1
5,1
Momento d'inerzia del rotore
JL
10-2
3,09
3,09
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
12,4
3,09
Induttanza di linea dell'avvolgimento
LSTR
mH
47,5
11,9
QH,MAX
kW
2,91
2,91
l/min
5,4
5,4
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
7,7
7,7
Caduta di pressione
ΔpH
bar
0,4
0,4
186
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6090-xxx10-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%.[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
187
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6090-xxB15-xxxx
Tabella 14- 4 1FW6090-xxB15-1Jxx, 1FW6090-xxB15-2Jxx
Dati tecnici
1FW6090
Sigla
identificativa
Unità
-xxB15-1Jxx
-xxB15-2Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
338
319
Corrente nominale
IN
A
15
23
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
150
310
Potenza dissipata nominale
PV,N
kW
4,87
4,96
Coppia massima
MMAX
Nm
537
537
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
26
43
17,1
24,1
giri/min
78
200
giri/min
290
470
Coppia con n = 1 [1/min]
M0
Nm
357
357
Corrente con M0 e n = 1 [1/min]
I0
A
16
26
Coppia da fermo termica
M0*
Nm
252
252
Corrente da fermo termica
I 0*
A
11
18
Costante di coppia a 20 °C
kT,20
Nm/A
22,5
13,7
Costante di tensione
kE
V/(1000/
min)
1359
831,3
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
5,3
5,25
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
22
22
Coppia di riposo
MCOG
Nm
3,6
3,6
Costanti fisiche
Massa dello statore
mS
kg
19,5
19,5
Massa del rotore
mL
kg
7,7
7,7
Momento d'inerzia del rotore
JL
10-2
4,65
4,65
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
4,3
1,64
Induttanza di linea dell'avvolgimento
LSTR
mH
17,7
6,6
QH,MAX
kW
4,05
4,13
7
7
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
l/min
Incremento di temperatura del refrigerante
ΔTH
K
8,3
8,5
Caduta di pressione
ΔpH
bar
0,6
0,6
188
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6090-xxx15-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
189
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2.2
1FW6130-xxxxx-xxxx
Foglio dati 1FW6130-xxB05-xxxx
Tabella 14- 5 1FW6130-xxB05-0Kxx, 1FW6130-xxB05-1Jxx
Dati tecnici
1FW6130
Sigla
identificativa
Unità
-xxB05-0Kxx
-xxB05-1Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
241
217
Corrente nominale
IN
A
9
14
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
130
310
Potenza dissipata nominale
PV,N
kW
2,93
2,93
Coppia massima
MMAX
Nm
439
439
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
18
32
12,2
18,3
giri/min
47
180
giri/min
240
420
Coppia con n = 1 [1/min]
M0
Nm
258
258
Corrente con M0 e n = 1 [1/min]
I0
A
9,7
17
Coppia da fermo termica
M0*
Nm
183
183
Corrente da fermo termica
I 0*
A
6,7
12
Costante di coppia a 20 °C
kT,20
Nm/A
27,3
15,3
Costante di tensione
kE
V/(1000/
min)
1650
924,9
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
4,93
4,92
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
1,3
1,3
Costanti fisiche
Massa dello statore
mS
kg
8,7
8,7
Massa del rotore
mL
kg
4,5
4,5
Momento d'inerzia del rotore
JL
10-2 kgm2
6,37
6,37
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
7,34
2,31
Induttanza di linea dell'avvolgimento
LSTR
mH
19,2
6
QH,MAX
kW
2,43
2,44
Dati del radiatore principale del motore
Max. potenza termica dissipata
190
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6130
Sigla
identificativa
Flusso volumetrico minimo consigliato
H,MIN
Unità
-xxB05-0Kxx
-xxB05-1Jxx
l/min
4,1
4,1
Incremento di temperatura del refrigerante
ΔTH
K
8,5
8,6
Caduta di pressione
ΔpH
bar
0,1
0,1
Curve caratteristiche dei motori 1FW6130-xxx05-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%.[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
191
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6130-xxB07-xxxx
Tabella 14- 6 1FW6130-xxB07-0Kxx, 1FW6130-xxB07-1Jxx
Dati tecnici
1FW6130
Sigla
identificativa
Unità
-xxB07-0Kxx
-xxB07-1Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
344
324
Corrente nominale
IN
A
10
15
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
96
200
Potenza dissipata nominale
PV,N
kW
3,73
3,71
Coppia massima
MMAX
Nm
614
614
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
20
32
14,2
19,7
giri/min
21
110
giri/min
190
300
Coppia con n = 1 [1/min]
M0
Nm
361
361
Corrente con M0 e n = 1 [1/min]
I0
A
10
17
Coppia da fermo termica
M0*
Nm
256
256
Corrente da fermo termica
I 0*
A
7,6
12
Costante di coppia a 20 °C
kT,20
Nm/A
34
21,4
Costante di tensione
kE
V/(1000/
min)
2056
1295
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
6,11
6,13
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
1,8
1,8
Costanti fisiche
Massa dello statore
mS
kg
11,9
11,9
Massa del rotore
mL
kg
6,3
6,3
Momento d'inerzia del rotore
JL
10-2
8,92
8,92
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
7,41
2,92
Induttanza di linea dell'avvolgimento
LSTR
mH
21
8,3
QH,MAX
kW
3,1
3,09
l/min
5,2
5,2
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,6
8,5
Caduta di pressione
ΔpH
bar
0,2
0,2
192
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6130-xxx07-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%.[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
193
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6130-xxB10-xxxx
Tabella 14- 7 1FW6130-xxB10-1Jxx, 1FW6130-xxB10-2Jxx
Dati tecnici
1FW6130
Sigla
identificativa
Unità
-xxB10-1Jxx
-xxB10-2Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
484
450
Corrente nominale
IN
A
16
24
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
120
250
Potenza dissipata nominale
PV,N
kW
4,88
4,98
Coppia massima
MMAX
Nm
878
878
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
32
53
21,4
30,6
giri/min
50
150
giri/min
210
350
Coppia con n = 1 [1/min]
M0
Nm
516
516
Corrente con M0 e n = 1 [1/min]
I0
A
17
28
Coppia da fermo termica
M0*
Nm
365
365
Corrente da fermo termica
I 0*
A
12
19
Costante di coppia a 20 °C
kT,20
Nm/A
30,6
18,6
Costante di tensione
kE
V/(1000/
min)
1850
1124
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
7,63
7,55
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
2,6
2,6
Costanti fisiche
Massa dello statore
mS
kg
16,2
16,2
Massa del rotore
mL
kg
9
9
Momento d'inerzia del rotore
JL
10-2
12,7
12,7
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
3,84
1,45
Induttanza di linea dell'avvolgimento
LSTR
mH
11,7
4,3
QH,MAX
kW
4,06
4,15
7
7
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
l/min
Incremento di temperatura del refrigerante
ΔTH
K
8,3
8,5
Caduta di pressione
ΔpH
bar
0,4
0,4
194
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6130-xxx10-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
195
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6130-xxB15-xxxx
Tabella 14- 8 1FW6130-xxB15-1Jxx, 1FW6130-xxB15-2Jxx
Dati tecnici
1FW6130
Sigla
identificativa
Unità
-xxB15-1Jxx
-xxB15-2Jxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
744
714
Corrente nominale
IN
A
18
26
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
78
150
Potenza dissipata nominale
PV,N
kW
6,81
6,81
Coppia massima
MMAX
Nm
1320
1320
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
36
54
25,4
34,1
giri/min
14
77
giri/min
160
240
Coppia con n = 1 [1/min]
M0
Nm
775
775
Corrente con M0 e n = 1 [1/min]
I0
A
19
29
Coppia da fermo termica
M0*
Nm
548
548
Corrente da fermo termica
I 0*
A
13
20
Costante di coppia a 20 °C
kT,20
Nm/A
40,9
27,3
Costante di tensione
kE
V/(1000/
min)
2475
1650
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
9,69
9,69
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
3,9
3,9
Massa dello statore
mS
kg
24,7
24,7
Massa del rotore
mL
kg
13,5
13,5
Momento d'inerzia del rotore
JL
10-2
19,1
19,1
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
4,27
1,9
Induttanza di linea dell'avvolgimento
LSTR
mH
13,9
6,2
QH,MAX
kW
5,67
5,67
l/min
9,8
9,8
Costanti fisiche
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,3
8,3
Caduta di pressione
ΔpH
bar
0,6
0,6
196
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6130-xxx15-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
197
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2.3
1FW6150-xxxxx-xxxx
Foglio dati 1FW6150-xxB05-xxxx
Tabella 14- 9 1FW6150-xxB05-1Jxx, 1FW6150-xxB05-4Fxx
Dati tecnici
1FW6150
Sigla
identificativa
Unità
-xxB05-1Jxx
-xxB05-4Fxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
338
298
Corrente nominale
IN
A
17
36
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
230
650
Potenza dissipata nominale
PV,N
kW
2,57
2,52
Coppia massima
MMAX
Nm
710
710
Corrente massima
IMAX
A
44
100
Potenza elettrica del motore con MMAX
PEL,MAX
kW
22,8
39,4
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
110
330
Numero di giri a vuoto
nMAX,0
giri/min
350
830
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
360
360
Corrente con M0 e n = 1 [1/min]
I0
A
18
44
Coppia da fermo termica
M0*
Nm
255
255
Corrente da fermo termica
I 0*
A
12
30
Costante di coppia a 20 °C
kT,20
Nm/A
19,8
8,26
Costante di tensione
kE
V/(1000/
min)
1199
499,6
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
7,2
7,26
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
1,8
1,8
Costanti fisiche
Massa dello statore
mS
kg
17,9
17,9
Massa del rotore
mL
kg
3,8
3,8
JL
10-2
10,1
10,1
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
1,82
0,31
Induttanza di linea dell'avvolgimento
LSTR
mH
9,4
1,6
QH,MAX
kW
2,13
2,1
Momento d'inerzia del rotore
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
198
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6150
Sigla
identificativa
Flusso volumetrico minimo consigliato
H,MIN
Unità
-xxB05-1Jxx
-xxB05-4Fxx
l/min
4,5
4,5
Incremento di temperatura del refrigerante
ΔTH
K
6,8
6,7
Caduta di pressione
ΔpH
bar
0,2
0,2
Curve caratteristiche dei motori 1FW6150-xxx05-xxxx
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
199
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6150-xxB07-xxxx
Tabella 14- 10
1FW6150-xxB07-2Jxx, 1FW6150-xxB07-4Fxx
Dati tecnici
1FW6150
Sigla
identificativa
Unità
-xxB07-2Jxx
-xxB07-4Fxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
470
445
Corrente nominale
IN
A
25
38
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
260
450
Potenza dissipata nominale
PV,N
kW
3,28
3,23
Coppia massima
MMAX
Nm
994
994
Corrente massima
IMAX
A
66
100
Potenza elettrica del motore con MMAX
PEL,MAX
kW
32
42,7
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
130
230
Numero di giri a vuoto
nMAX,0
giri/min
370
600
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
504
504
Corrente con M0 e n = 1 [1/min]
I0
A
27
44
Coppia da fermo termica
M0*
Nm
356
356
Corrente da fermo termica
I 0*
A
19
30
Costante di coppia a 20 °C
kT,20
Nm/A
18,5
11,6
Costante di tensione
kE
V/(1000/
min)
1119
699,4
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
8,91
8,99
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
2,5
2,5
Costanti fisiche
Massa dello statore
mS
kg
24,7
24,7
Massa del rotore
mL
kg
8,8
8,8
Momento d'inerzia del rotore
JL
10-2
14,2
14,2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
1,03
0,396
Induttanza di linea dell'avvolgimento
LSTR
mH
5,8
2,3
QH,MAX
kW
2,73
2,68
l/min
6,5
6,5
6
5,9
0,4
0,4
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
Caduta di pressione
ΔpH
bar
200
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6150-xxx07-xxxx
):[[%-[[
&RSSLD9HORFLW¢
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
201
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6150-xxB10-xxxx
Tabella 14- 11
1FW6150-xxB10-2Jxx, 1FW6150-xxB10-4Fxx
Dati tecnici
1FW6150
Sigla
identificativa
Unità
-xxB10-2Jxx
-xxB10-4Fxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
688
664
Corrente nominale
IN
A
26
40
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
170
300
Potenza dissipata nominale
PV,N
kW
4,36
4,28
Coppia massima
MMAX
Nm
1420
1420
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
66
100
36,2
47,3
giri/min
76
150
giri/min
260
420
Coppia con n = 1 [1/min]
M0
Nm
720
720
Corrente con M0 e n = 1 [1/min]
I0
A
27
44
Coppia da fermo termica
M0*
Nm
509
509
Corrente da fermo termica
I 0*
A
19
30
Costante di coppia a 20 °C
kT,20
Nm/A
26,4
16,5
Costante di tensione
kE
V/(1000/
min)
1599
999,1
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
11,1
11,1
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
3,6
3,6
Massa dello statore
mS
kg
34,9
34,9
Massa del rotore
mL
kg
12,6
12,6
Momento d'inerzia del rotore
JL
10-2
20,9
20,9
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
1,37
0,526
Induttanza di linea dell'avvolgimento
LSTR
mH
8,2
3,2
QH,MAX
kW
3,62
3,56
l/min
7,5
7,5
Costanti fisiche
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
6,9
6,8
Caduta di pressione
ΔpH
bar
0,5
0,5
202
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6150-xxx10-xxxx
):[[%-[[
&RSSLD9HORFLW¢
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
203
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6150-xxB15-xxxx
Tabella 14- 12
1FW6150-xxB15-2Jxx, 1FW6150-xxB15-4Fxx
Dati tecnici
1FW6150
Sigla
identificativa
Unità
-xxB15-2Jxx
-xxB15-4Fxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp, di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
1050
1030
Corrente nominale
IN
A
26
41
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
100
190
Potenza dissipata nominale
PV,N
kW
6,14
6,04
Coppia massima
MMAX
Nm
2130
2130
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
Condizioni marginali
Dati nel punto di misura
Dati limite
66
100
42,4
54,5
giri/min
32
89
nMAX,0
giri/min
170
280
Coppia con n = 1 [1/min]
M0
Nm
1080
1080
Corrente con M0 e n = 1 [1/min]
I0
A
27
44
Coppia da fermo termica
M0*
Nm
764
764
Corrente da fermo termica
I 0*
A
19
30
Costante di coppia a 20 °C
kT,20
Nm/A
39,7
24,8
Costante di tensione
kE
V/(1000/
min)
2398
1499
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
14
14,1
Costante di tempo termica
tTH
s
60
60
N. di coppie di poli
p
-
33
33
Coppia di riposo
MCOG
Nm
5,4
5,4
Massa dello statore
mS
kg
51,9
51,9
Massa del rotore
mL
kg
18,9
18,9
Momento d'inerzia del rotore
JL
10-2
31,3
31,3
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
1,93
0,742
Induttanza di linea dell'avvolgimento
LSTR
mH
12,3
4,8
QH,MAX
kW
5,11
5,03
l/min
9,5
9,5
Costanti fisiche
kgm2
Dati del radiatore principale del motore
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
7,7
7,6
Caduta di pressione
ΔpH
bar
0,8
0,8
204
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6150-xxx15-xxxx
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOH
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
205
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2.4
1FW6160-xxxxx-xxxx
Foglio dati 1FW6160-xxB05-xxxx
Tabella 14- 13
1FW6160-xxB05-1Jxx, 1FW6160-xxB05-2Jxx, 1FW6160-xxB05-5Gxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB05-1Jxx
-xxB05-2Jxx
-xxB05-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
431
404
314
Corrente nominale
IN
A
16
24
36
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
140
250
590
Potenza dissipata nominale
PV,N
kW
2,84
2,85
2,88
Coppia massima
MMAX
Nm
716
716
716
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
49
98
15,1
20
33,1
giri/min
84
150
320
giri/min
240
380
750
Coppia con n = 1 [1/min]
M0
Nm
467
467
467
Corrente con M0 e n = 1 [1/min]
I0
A
17
28
56
Coppia da fermo termica
M0*
Nm
330
330
330
Corrente da fermo termica
I 0*
A
12
19
38
Costante di coppia a 20 °C
kT,20
Nm/A
26,6
17
8,51
Costante di tensione
kE
V/(1000/
min)
1608
1029
514,5
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
8,96
8,95
8,91
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
35
35
35
Coppia di riposo
MCOG
Nm
2,3
2,3
2,3
Massa dello statore
mS
kg
27,2
27,2
27,2
Massa del rotore
mL
kg
9,1
9,1
9,1
JL
10-2
19
19
19
Costanti fisiche
Momento d'inerzia del rotore
kgm2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,11
0,866
0,218
Induttanza di linea dell'avvolgimento
LSTR
mH
18,1
7,4
1,9
QH,MAX
kW
2,13
2,14
2,16
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
206
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Flusso volumetrico minimo consigliato
H,MIN
Unità
-xxB05-1Jxx
-xxB05-2Jxx
-xxB05-5Gxx
l/min
3,8
3,8
3,8
Incremento di temperatura del refrigerante
ΔTH
K
8
8
8,1
Caduta di pressione
ΔpH
bar
0,3
0,3
0,3
QP,MAX
kW
0,23
0,231
0,233
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
1,5
1,5
1,5
Incremento di temperatura del refrigerante
ΔTP
K
2,3
2,3
2,3
Caduta di pressione
ΔpP
bar
0,3
0,3
0,3
P,MIN
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
207
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6160-xxx05-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
208
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6160-xxB07-xxxx
Tabella 14- 14
1FW6160 xxB07-1Jxx, 1FW6160-xxB07-2Jxx, 1FW6160-xxB07-5Gxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB07-1Jxx
-xxB07-2Jxx
-xxB07-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp.di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
620
594
514
Corrente nominale
IN
A
16
25
43
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
96
170
390
Potenza dissipata nominale
PV,N
kW
3,59
3,61
3,64
Coppia massima
MMAX
Nm
1000
1000
1000
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
49
98
16,7
21,8
35,2
giri/min
53
100
230
giri/min
170
270
540
Coppia con n = 1 [1/min]
M0
Nm
653
653
653
Corrente con M0 e n = 1 [1/min]
I0
A
17
28
56
Coppia da fermo termica
M0*
Nm
462
462
462
Corrente da fermo termica
I 0*
A
12
19
38
Costante di coppia a 20 °C
kT,20
Nm/A
37,2
23,8
11,9
Costante di tensione
kE
V/(1000/
min)
2251
1441
720,4
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
11,2
11,1
11,1
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
35
35
35
Coppia di riposo
MCOG
Nm
3,3
3,3
3,3
Costanti fisiche
Massa dello statore
mS
kg
36,2
36,2
36,2
Massa del rotore
mL
kg
12,1
12,1
12,1
Momento d'inerzia del rotore
JL
10-2 kgm2
25,8
25,8
25,8
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,66
1,09
0,276
Induttanza di linea dell'avvolgimento
LSTR
mH
25,1
10,3
2,6
QH,MAX
kW
2,7
2,71
2,73
l/min
4,8
4,8
4,8
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,2
8,2
8,3
Caduta di pressione
ΔpH
bar
0,4
0,4
0,4
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
209
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB07-1Jxx
-xxB07-2Jxx
-xxB07-5Gxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,291
0,292
0,294
l/min
kW
1,8
1,8
1,8
Incremento di temperatura del refrigerante
ΔTP
K
2,3
2,3
2,3
Caduta di pressione
ΔpH
bar
0,4
0,4
0,4
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 15
1FW6160-xxB07-8Fxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB07-8Fxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
432
Corrente nominale
IN
A
51
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
610
Potenza dissipata nominale
PV,N
kW
3,73
Coppia massima
MMAX
Nm
1000
Corrente massima
IMAX
A
140
Potenza elettrica del motore con MMAX
PEL,MAX
kW
46,7
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
330
Numero di giri a vuoto
nMAX,0
giri/min
770
Coppia con n = 1 [1/min]
M0
Nm
653
Corrente con M0 e n = 1 [1/min]
I0
A
80
Coppia da fermo termica
M0*
Nm
462
Corrente da fermo termica
I 0*
A
55
Costante di coppia a 20 °C
kT,20
Nm/A
8,34
Costante di tensione
kE
V/(1000/
min)
504,3
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
11
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
35
Coppia di riposo
MCOG
Nm
3,3
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Massa dello statore
mS
kg
36,2
Massa del rotore
mL
kg
12,1
210
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB07-8Fxx
Momento d'inerzia del rotore
JL
10-2 kgm2
25,8
0,139
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
mH
1,3
QH,MAX
kW
2,8
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
4,8
Incremento di temperatura del refrigerante
ΔTH
K
8,5
Caduta di pressione
ΔpH
bar
0,4
kW
0,302
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
l/min
1,8
Incremento di temperatura del refrigerante
ΔTP
K
2,4
Caduta di pressione
ΔpH
bar
0,4
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
211
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6160-xxx07-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
212
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%*[[
&RSSLD9HORFLW¢
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6160-xxB10-xxxx
Tabella 14- 16
1FW6160-xxB10-1Jxx, 1FW6160-xxB10-2Jxx, 1FW6160-xxB10-5Gxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB10-1Jxx
-xxB10-2Jxx
-xxB10-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temperatura di mandata del raffreddamento ad
acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
MN
Nm
903
878
804
Condizioni marginali
Dati nel punto di misura
Coppia nominale
Corrente nominale
IN
A
17
26
47
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
60
110
260
Potenza dissipata nominale
PV,N
kW
4,72
4,74
4,77
Dati limite
Coppia massima
MMAX
Nm
1430
1430
1430
Corrente massima
IMAX
A
31
49
98
Potenza elettrica del motore con MMAX
PEL,MAX
kW
19
24,4
38,1
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
29
65
160
Numero di giri a vuoto
nMAX,0
giri/min
120
190
380
Coppia con n = 1 [1/min]
M0
Nm
933
933
933
Corrente con M0 e n = 1 [1/min]
I0
A
17
28
56
Coppia da fermo termica
M0*
Nm
660
660
660
Corrente da fermo termica
I 0*
A
12
19
38
Costante di coppia a 20 °C
kT,20
Nm/A
53,2
34
17
Costante di tensione
kE
V/(1000/
min)
3216
2058
1029
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
13,9
13,9
13,8
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
35
35
35
Costanti fisiche
Coppia di riposo
MCOG
Nm
4,7
4,7
4,7
Massa dello statore
mS
kg
49
49
49
Massa del rotore
mL
kg
17,3
17,3
17,3
JL
10-2
36
36
36
Momento d'inerzia del rotore
kgm2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
3,49
1,44
0,362
Induttanza di linea dell'avvolgimento
LSTR
mH
35,5
14,5
3,6
QH,MAX
kW
3,54
3,56
3,59
l/min
6,4
6,4
6,4
8
8
8,1
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
Incremento di temperatura del refrigerante
H,MIN
ΔTH
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
K
213
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB10-1Jxx
-xxB10-2Jxx
-xxB10-5Gxx
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
QP,MAX
kW
0,382
0,384
0,387
l/min
2,5
2,5
2,5
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
P,MIN
Incremento di temperatura del refrigerante
ΔTP
K
2,2
2,2
2,2
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 17
1FW6160-xxB10-8Fxx, 1FW6160-xxB10-2Pxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB10-8Fxx
-xxB10-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
732
622
Corrente nominale
IN
A
61
73
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
390
600
Potenza dissipata nominale
PV,N
kW
4,9
4,77
Coppia massima
MMAX
Nm
1430
1430
Corrente massima
IMAX
A
140
190
Potenza elettrica del motore con MMAX
PEL,MAX
kW
49,8
64,6
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
230
330
Numero di giri a vuoto
nMAX,0
giri/min
540
750
Coppia con n = 1 [1/min]
M0
Nm
933
933
Corrente con M0 e n = 1 [1/min]
I0
A
80
110
Coppia da fermo termica
M0*
Nm
660
660
Corrente da fermo termica
I 0*
A
55
77
Costante di coppia a 20 °C
kT,20
Nm/A
11,9
8,51
Costante di tensione
kE
V/(1000/
min)
720,4
514,5
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
13,7
13,8
Costante di tempo termica
tTH
s
180
180
N. di coppie di poli
p
-
35
35
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Coppia di riposo
MCOG
Nm
4,7
4,7
Massa dello statore
mS
kg
49
50,1
214
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
Massa del rotore
mL
kg
Momento d'inerzia del rotore
JL
10-2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
kgm2
-xxB10-8Fxx
-xxB10-2Pxx
17,3
17,3
36
36
0,182
0,0906
mH
1,8
0,9
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
QH,MAX
Flusso volumetrico minimo consigliato
H,MIN
kW
3,68
3,59
l/min
6,4
6,4
Incremento di temperatura del refrigerante
ΔTH
K
8,3
8,1
Caduta di pressione
ΔpH
bar
0,8
0,8
QP,MAX
kW
0,397
0,387
l/min
2,5
2,5
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
P,MIN
Incremento di temperatura del refrigerante
ΔTP
K
2,3
2,2
Caduta di pressione
ΔpH
bar
0,8
0,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
215
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6160-xxx10-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%*[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
216
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
217
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6160-xxB15-xxxx
Tabella 14- 18
1FW6160-xxB15-2Jxx, 1FW6160-xxB15-5Gxx, 1FW6160-xxB15-8Fxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB15-2Jxx
-xxB15-5Gxx -xxB15-8Fxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
1350
1280
1220
Corrente nominale
IN
A
26
50
68
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
66
160
240
Potenza dissipata nominale
PV,N
kW
6,62
6,67
6,84
Coppia massima
MMAX
Nm
2150
2150
2150
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
49
98
140
28,2
42,6
54,6
giri/min
34
97
150
giri/min
130
250
360
Coppia con n = 1 [1/min]
M0
Nm
1400
1400
1400
Corrente con M0 e n = 1 [1/min]
I0
A
28
56
80
Coppia da fermo termica
M0*
Nm
990
990
990
Corrente da fermo termica
I 0*
A
19
38
55
Costante di coppia a 20 °C
kT,20
Nm/A
51,1
25,5
17,9
Costante di tensione
kE
V/(1000/
min)
3087
1544
1081
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
17,6
17,6
17,3
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
35
35
35
Coppia di riposo
MCOG
Nm
7
7
7
Costanti fisiche
Massa dello statore
mS
kg
69,8
69,8
69,8
Massa del rotore
mL
kg
25,5
25,5
25,5
Momento d'inerzia del rotore
JL
10-2 kgm2
53,1
53,1
53,1
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,01
0,506
0,254
Induttanza di linea dell'avvolgimento
LSTR
mH
21,7
5,4
2,7
QH,MAX
kW
4,97
5,01
5,14
l/min
8,9
8,9
8,9
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,1
8,1
8,3
Caduta di pressione
ΔpH
bar
1,4
1,4
1,4
218
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB15-2Jxx
-xxB15-5Gxx -xxB15-8Fxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,536
0,54
0,554
l/min
kW
3,6
3,6
3,6
Incremento di temperatura del refrigerante
ΔTP
K
2,1
2,2
2,2
Caduta di pressione
ΔpH
bar
1,4
1,4
1,4
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 19
1FW6160-xxB15-2Pxx, 1FW6160-xxB15-0Wxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB15-2Pxx
-xxB15-0Wxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
1120
961
Corrente nominale
IN
A
88
100
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
360
560
Potenza dissipata nominale
PV,N
kW
6,67
6,84
Coppia massima
MMAX
Nm
2150
2150
Corrente massima
IMAX
A
190
280
Potenza elettrica del motore con MMAX
PEL,MAX
kW
69,5
92,8
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
220
320
Numero di giri a vuoto
nMAX,0
giri/min
500
720
Coppia con n = 1 [1/min]
M0
Nm
1400
1400
Corrente con M0 e n = 1 [1/min]
I0
A
110
160
Coppia da fermo termica
M0*
Nm
990
990
Corrente da fermo termica
I 0*
A
77
110
Costante di coppia a 20 °C
kT,20
Nm/A
12,8
8,94
Costante di tensione
kE
V/(1000/
min)
771,8
540,3
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
17,6
17,3
Costante di tempo termica
tTH
s
180
180
N. di coppie di poli
p
-
35
35
Coppia di riposo
MCOG
Nm
7
7
Massa dello statore
mS
kg
70,9
70,9
Massa del rotore
mL
kg
25,5
25,5
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
219
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB15-2Pxx
-xxB15-0Wxx
Momento d'inerzia del rotore
JL
10-2 kgm2
53,1
53,1
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,127
0,0636
Induttanza di linea dell'avvolgimento
LSTR
mH
1,4
0,7
QH,MAX
kW
5,01
5,14
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
8,9
8,9
Incremento di temperatura del refrigerante
ΔTH
K
8,1
8,3
Caduta di pressione
ΔpH
bar
1,4
1,4
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
QP,MAX
P,MIN
kW
0,54
0,554
l/min
3,6
3,6
Incremento di temperatura del refrigerante
ΔTP
K
2,2
2,2
Caduta di pressione
ΔpH
bar
1,4
1,4
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
220
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6160-xxx15-xxxx
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
):[[%)[[
&RSSLD9HORFLW¢
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%:[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
221
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
222
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6160-xxB20-xxxx
Tabella 14- 20
1FW6160-xxB20-5Gxx, 1FW6160-xxB20-8Fxx, 1FW6160-xxB20-2Pxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB20-5Gxx
-xxB20-8Fxx
-xxB20-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
1750
1690
1600
Corrente nominale
IN
A
52
72
95
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
110
170
260
Potenza dissipata nominale
PV,N
kW
8,57
8,79
8,57
Coppia massima
MMAX
Nm
2860
2860
2860
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
98
140
190
46,9
59,2
74,2
giri/min
68
110
160
giri/min
190
270
380
1870
1870
1870
56
80
110
1320
1320
1320
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
38
55
77
Costante di coppia a 20 °C
kT,20
Nm/A
34
23,8
17
Costante di tensione
kE
V/(1000/
min)
2058
1441
1029
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
20,6
20,4
20,6
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
35
35
35
Coppia di riposo
MCOG
Nm
9,3
9,3
9,3
Costanti fisiche
Massa dello statore
mS
kg
90,6
90,6
91,7
Massa del rotore
mL
kg
33,7
33,7
33,7
Momento d'inerzia del rotore
JL
10-2 kgm2
70,1
70,1
70,1
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,65
0,327
0,163
Induttanza di linea dell'avvolgimento
LSTR
mH
7,2
3,5
1,8
QH,MAX
kW
6,43
6,6
6,43
l/min
11,4
11,4
11,4
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,1
8,4
8,1
Caduta di pressione
ΔpH
bar
2,3
2,3
2,3
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
223
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB20-5Gxx
-xxB20-8Fxx
-xxB20-2Pxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,694
0,712
0,694
l/min
kW
4,7
4,7
4,7
Incremento di temperatura del refrigerante
ΔTP
K
2,1
2,2
2,1
Caduta di pressione
ΔpH
bar
2,3
2,3
2,3
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 21
1FW6160-xxB20-0Wxx
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB20-0Wxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
1460
Corrente nominale
IN
A
120
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
400
Potenza dissipata nominale
PV,N
kW
8,79
Coppia massima
MMAX
Nm
2860
Corrente massima
IMAX
A
280
Potenza elettrica del motore con MMAX
PEL,MAX
kW
97,7
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
240
Numero di giri a vuoto
nMAX,0
giri/min
540
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
1870
Corrente con M0 e n = 1 [1/min]
I0
A
160
Coppia da fermo termica
M0*
Nm
1320
Corrente da fermo termica
I 0*
A
110
Costante di coppia a 20 °C
kT,20
Nm/A
11,9
Costante di tensione
kE
V/(1000/
min)
720,4
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
20,4
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
35
Coppia di riposo
MCOG
Nm
9,3
Costanti fisiche
Massa dello statore
mS
kg
91,7
Massa del rotore
mL
kg
33,7
224
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6160
Sigla
identificativa
Unità
-xxB20-0Wxx
Momento d'inerzia del rotore
JL
10-2 kgm2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
mH
0,9
QH,MAX
kW
6,6
70,1
0,0817
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
11,4
Incremento di temperatura del refrigerante
ΔTH
K
8,4
Caduta di pressione
ΔpH
bar
2,3
kW
0,712
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
l/min
4,7
Incremento di temperatura del refrigerante
ΔTP
K
2,2
Caduta di pressione
ΔpH
bar
2,3
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
225
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6160-xxx20-xxxx
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%*[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
226
):[[%:[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%3[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2.5
1FW6190-xxxxx-xxxx
Foglio dati 1FW6190-xxB05-xxxx
Tabella 14- 22
1FW6190-xxB05-1Jxx, 1FW6190-xxB05-2Jxx, 1FW6190-xxB05-5Gxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB05-1Jxx
-xxB05-2Jxx
-xxB05-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
633
605
509
Corrente nominale
IN
A
17
24
40
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
97
160
380
Potenza dissipata nominale
PV,N
kW
3,51
3,51
3,51
Coppia massima
MMAX
Nm
990
990
990
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
47
95
16,3
20,6
32,9
giri/min
54
96
210
giri/min
180
260
530
Coppia con n = 1 [1/min]
M0
Nm
672
672
672
Corrente con M0 e n = 1 [1/min]
I0
A
18
27
54
Coppia da fermo termica
M0*
Nm
475
475
475
Corrente da fermo termica
I 0*
A
12
18
37
Costante di coppia a 20 °C
kT,20
Nm/A
38,7
25,8
12,9
Costante di tensione
kE
V/(1000/
min)
2338
1559
779,4
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
11,9
11,9
11,9
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
3,4
3,4
3,4
Costanti fisiche
Massa dello statore
mS
kg
32,1
32,1
32,1
Massa del rotore
mL
kg
10,7
10,7
10,7
Momento d'inerzia del rotore
JL
10-2 kgm2
35,8
35,8
35,8
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,53
1,12
0,281
Induttanza di linea dell'avvolgimento
LSTR
mH
21,5
9,6
2,4
QH,MAX
kW
2,64
2,64
2,64
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
227
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Flusso volumetrico minimo consigliato
Sigla
identificativa
H,MIN
Unità
-xxB05-1Jxx
-xxB05-2Jxx
-xxB05-5Gxx
l/min
5,2
5,2
5,2
Incremento di temperatura del refrigerante
ΔTH
K
7,3
7,3
7,3
Caduta di pressione
ΔpH
bar
0,5
0,5
0,5
QP,MAX
kW
0,284
0,284
0,284
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
1,8
1,8
1,8
Incremento di temperatura del refrigerante
ΔTP
K
2,3
2,3
2,3
Caduta di pressione
ΔpH
bar
0,5
0,5
0,5
P,MIN
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
228
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6190-xxx05-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
229
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6190-xxB07-xxxx
Tabella 14- 23
1FW6190-xxB07-1Jxx, 1FW6190-xxB07-2Jxx, 1FW6190-xxB07-5Gxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB07-1Jxx
-xxB07-2Jxx
-xxB07-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
905
879
791
Corrente nominale
IN
A
17
25
44
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
63
110
250
Potenza dissipata nominale
PV,N
kW
4,44
4,44
4,44
Coppia massima
MMAX
Nm
1390
1390
1390
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
47
95
18,2
22,7
35,4
giri/min
33
64
150
giri/min
130
190
380
Coppia con n = 1 [1/min]
M0
Nm
941
941
941
Corrente con M0 e n = 1 [1/min]
I0
A
18
27
54
Coppia da fermo termica
M0*
Nm
666
666
666
Corrente da fermo termica
I 0*
A
12
18
37
Costante di coppia a 20 °C
kT,20
Nm/A
54,1
36,1
18
Costante di tensione
kE
V/(1000/
min)
3274
2182
1091
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
14,8
14,8
14,8
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
4,7
4,7
4,7
Costanti fisiche
Massa dello statore
mS
kg
41,2
41,2
41,2
Massa del rotore
mL
kg
14,6
14,6
14,6
Momento d'inerzia del rotore
JL
10-2 kgm2
48,6
48,6
48,6
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
3,19
1,42
0,355
Induttanza di linea dell'avvolgimento
LSTR
mH
29,8
13,2
3,3
QH,MAX
kW
3,33
3,33
3,33
l/min
5,9
5,9
5,9
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,1
8,1
8,1
Caduta di pressione
ΔpH
bar
0,6
0,6
0,6
230
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
QP,MAX
kW
-xxB07-1Jxx
-xxB07-2Jxx
-xxB07-5Gxx
0,359
0,359
0,359
2
2
2
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
P,MIN
l/min
Incremento di temperatura del refrigerante
ΔTP
K
2,5
2,5
2,5
Caduta di pressione
ΔpH
bar
0,6
0,6
0,6
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 24
1FW6190-xxB07-8Fxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB07-8Fxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
704
Corrente nominale
IN
A
56
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
390
Potenza dissipata nominale
PV,N
kW
4,57
Coppia massima
MMAX
Nm
1390
Corrente massima
IMAX
A
130
Potenza elettrica del motore con MMAX
PEL,MAX
kW
46,3
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
220
Numero di giri a vuoto
nMAX,0
giri/min
540
Coppia con n = 1 [1/min]
M0
Nm
941
Corrente con M0 e n = 1 [1/min]
I0
A
78
Coppia da fermo termica
M0*
Nm
666
Corrente da fermo termica
I 0*
A
53
Costante di coppia a 20 °C
kT,20
Nm/A
12,6
Costante di tensione
kE
V/(1000/
min)
763,8
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
14,6
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
42
Coppia di riposo
MCOG
Nm
4,7
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Massa dello statore
mS
kg
41,2
Massa del rotore
mL
kg
14,6
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
231
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB07-8Fxx
Momento d'inerzia del rotore
JL
10-2 kgm2
48,6
0,179
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
mH
1,6
QH,MAX
kW
3,43
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
5,9
Incremento di temperatura del refrigerante
ΔTH
K
8,3
Caduta di pressione
ΔpH
bar
0,6
QP,MAX
kW
0,370
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
P,MIN
l/min
2
Incremento di temperatura del refrigerante
ΔTP
K
2,6
Caduta di pressione
ΔpH
bar
0,6
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
232
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6190-xxx07-xxxx
):[[%-[[
&RSSLD9HORFLW¢
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%*[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
233
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6190-xxB10-xxxx
Tabella 14- 25
1FW6190-xxB10-1Jxx, 1FW6190-xxB10-2Jxx, 1FW6190-xxB10-5Gxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB10-1Jxx
-xxB10-2Jxx
-xxB10-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
1310
1290
1210
Corrente nominale
IN
A
17
26
48
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
38
70
170
Potenza dissipata nominale
PV,N
kW
5,83
5,83
5,83
Coppia massima
MMAX
Nm
1980
1980
1980
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
47
95
20,7
25,7
38,7
giri/min
14
39
100
giri/min
88
130
260
Coppia con n = 1 [1/min]
M0
Nm
1340
1340
1340
Corrente con M0 e n = 1 [1/min]
I0
A
18
27
54
Coppia da fermo termica
M0*
Nm
951
951
951
Corrente da fermo termica
I 0*
A
12
18
37
Costante di coppia a 20 °C
kT,20
Nm/A
77,3
51,6
25,8
Costante di tensione
kE
V/(1000/
min)
4676
3118
1559
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
18,5
18,5
18,5
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
6,7
6,7
6,7
Costanti fisiche
Massa dello statore
mS
kg
55,5
55,5
55,5
Massa del rotore
mL
kg
20,3
20,3
20,3
Momento d'inerzia del rotore
JL
10-2 kgm2
67,8
67,8
67,8
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
4,19
1,86
0,466
Induttanza di linea dell'avvolgimento
LSTR
mH
42,2
18,8
4,7
QH,MAX
kW
4,38
4,38
4,38
l/min
6,7
6,7
6,7
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
9,4
9,4
9,4
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
234
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB10-1Jxx
-xxB10-2Jxx
-xxB10-5Gxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,472
0,472
0,472
l/min
kW
2,3
2,3
2,3
Incremento di temperatura del refrigerante
ΔTP
K
2,9
2,9
2,9
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 26
1FW6190-xxB10-8Fxx, 1FW6190-xxB10-2Pxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB10-8Fxx
-xxB10-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
1130
955
Corrente nominale
IN
A
64
84
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
260
450
Potenza dissipata nominale
PV,N
kW
6
5,87
Coppia massima
MMAX
Nm
1980
1980
Corrente massima
IMAX
A
130
210
Potenza elettrica del motore con MMAX
PEL,MAX
kW
49,9
69,9
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
150
250
Numero di giri a vuoto
nMAX,0
giri/min
380
590
Coppia con n = 1 [1/min]
M0
Nm
1340
1340
Corrente con M0 e n = 1 [1/min]
I0
A
78
120
Coppia da fermo termica
M0*
Nm
951
951
Corrente da fermo termica
I 0*
A
53
83
Costante di coppia a 20 °C
kT,20
Nm/A
18
11,5
Costante di tensione
kE
V/(1000/
min)
1091
693,7
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
18,2
18,4
Costante di tempo termica
tTH
s
180
180
N. di coppie di poli
p
-
42
42
Coppia di riposo
MCOG
Nm
6,7
6,7
Massa dello statore
mS
kg
55,5
56,8
Massa del rotore
mL
kg
20,3
20,3
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
235
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB10-8Fxx
-xxB10-2Pxx
Momento d'inerzia del rotore
JL
10-2 kgm2
67,8
67,8
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,235
0,093
Induttanza di linea dell'avvolgimento
LSTR
mH
2,3
0,9
QH,MAX
kW
4,51
4,41
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
6,7
6,7
Incremento di temperatura del refrigerante
ΔTH
K
9,7
9,5
Caduta di pressione
ΔpH
bar
0,8
0,8
kW
0,486
0,476
2,3
2,3
3
2,9
0,8
0,8
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
QP,MAX
P,MIN
l/min
Incremento di temperatura del refrigerante
ΔTP
K
Caduta di pressione
ΔpH
bar
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
236
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6190-xxx10-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%*[[
&RSSLD9HORFLW¢
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
237
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
238
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6190-xxB15-xxxx
Tabella 14- 27
1FW6190-xxB15-2Jxx, 1FW6190-xxB15-5Gxx, 1FW6190-xxB15-8Fxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB15-2Jxx
-xxB15-5Gxx
-xxB15-8Fxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
1970
1890
1820
Corrente nominale
IN
A
26
50
69
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
40
100
160
Potenza dissipata nominale
PV,N
kW
8,14
8,14
8,39
Coppia massima
MMAX
Nm
2970
2970
2970
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
47
95
130
30,1
44,1
55,6
giri/min
17
62
97
giri/min
88
180
250
2020
2020
2020
27
54
78
1430
1430
1430
18
37
53
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
77,3
38,7
27,1
Costante di tensione
kE
V/(1000/
min)
4676
2338
1637
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
23,4
23,4
23,1
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
10
10
10
Costanti fisiche
Massa dello statore
mS
kg
77,8
77,8
77,8
Massa del rotore
mL
kg
30
30
30
Momento d'inerzia del rotore
JL
10-2
99,8
99,8
99,8
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,6
0,651
0,329
Induttanza di linea dell'avvolgimento
LSTR
mH
28
7
3,4
QH,MAX
kW
6,11
6,11
6,3
l/min
8,8
8,8
8,8
kgm2
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
9,9
9,9
10,2
Caduta di pressione
ΔpH
bar
1,4
1,4
1,4
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
239
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB15-2Jxx
-xxB15-5Gxx
-xxB15-8Fxx
0,659
0,659
0,679
3,2
3,2
3,2
3
3
3,1
1,4
1,4
1,4
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
kW
l/min
Incremento di temperatura del refrigerante
ΔTP
K
Caduta di pressione
ΔpH
bar
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 28
1FW6190-xxB15-2Pxx, 1FW6190-xxB15-0Wxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB15-2Pxx
-xxB15-0Wxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
1670
1540
Corrente nominale
IN
A
99
110
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
270
370
Potenza dissipata nominale
PV,N
kW
8,21
8,39
Coppia massima
MMAX
Nm
2970
2970
Corrente massima
IMAX
A
210
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
75,8
91,5
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
160
210
Numero di giri a vuoto
nMAX,0
giri/min
390
500
Coppia con n = 1 [1/min]
M0
Nm
2020
2020
Corrente con M0 e n = 1 [1/min]
I0
A
120
150
Coppia da fermo termica
M0*
Nm
1430
1430
Corrente da fermo termica
I 0*
A
83
100
Costante di coppia a 20 °C
kT,20
Nm/A
17,2
13,5
Costante di tensione
kE
V/(1000/
min)
1041
818,4
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
23,3
23,1
Costante di tempo termica
tTH
s
180
180
N. di coppie di poli
p
-
42
42
Coppia di riposo
MCOG
Nm
10
10
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Massa dello statore
mS
kg
79,1
79,1
Massa del rotore
mL
kg
30
30
240
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB15-2Pxx
-xxB15-0Wxx
Momento d'inerzia del rotore
JL
10-2 kgm2
99,8
99,8
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,13
0,0822
Induttanza di linea dell'avvolgimento
LSTR
mH
1,4
0,9
QH,MAX
kW
6,17
6,3
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
8,8
8,8
Incremento di temperatura del refrigerante
ΔTH
K
10
10,2
Caduta di pressione
ΔpH
bar
1,4
1,4
kW
0,665
0,679
3,2
3,2
3
3,1
1,4
1,4
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
l/min
Incremento di temperatura del refrigerante
ΔTP
K
Caduta di pressione
ΔpH
bar
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
241
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6190-xxx15-xxxx
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%3[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
):[[%)[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%:[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
242
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQHLQ
SDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
243
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6190-xxB20-xxxx
Tabella 14- 29
1FW6190-xxB20-5Gxx, 1FW6190-xxB20-8Fxx, 1FW6190-xxB20-2Pxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB20-5Gxx
-xxB20-8Fxx
-xxB20-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
2570
2500
2360
Corrente nominale
IN
A
51
71
100
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
73
110
200
Potenza dissipata nominale
PV,N
kW
10,5
10,8
10,5
Coppia massima
MMAX
Nm
3960
3960
3960
Corrente massima
IMAX
A
95
130
210
Potenza elettrica del motore con MMAX
PEL,MAX
kW
49
61,1
81,5
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
42
68
120
Numero di giri a vuoto
nMAX,0
giri/min
130
190
300
2690
2690
2690
54
78
120
1900
1900
1900
37
53
83
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
51,6
36,1
22,9
Costante di tensione
kE
V/(1000/
min)
3118
2182
1387
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
27,6
27,2
27,5
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
13
13
13
Costanti fisiche
Massa dello statore
mS
kg
96,6
96,6
97,9
Massa del rotore
mL
kg
39,6
39,6
39,6
Momento d'inerzia del rotore
JL
10-2 kgm2
132
132
132
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,836
0,422
0,167
Induttanza di linea dell'avvolgimento
LSTR
mH
9,3
4,6
1,8
QH,MAX
kW
7,85
8,09
7,92
l/min
12,8
12,8
12,8
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,9
9,1
8,9
Caduta di pressione
ΔpH
bar
2,8
2,8
2,8
244
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB20-5Gxx
-xxB20-8Fxx
-xxB20-2Pxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,847
0,873
0,854
l/min
kW
4,7
4,7
4,7
Incremento di temperatura del refrigerante
ΔTP
K
2,6
2,6
2,6
Caduta di pressione
ΔpH
bar
2,8
2,8
2,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 30
1FW6190-xxB20-0Wxx
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB20-0Wxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
2250
Corrente nominale
IN
A
120
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
260
Potenza dissipata nominale
PV,N
kW
10,8
Coppia massima
MMAX
Nm
3960
Corrente massima
IMAX
A
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
97,4
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
160
Numero di giri a vuoto
nMAX,0
giri/min
380
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
2690
Corrente con M0 e n = 1 [1/min]
I0
A
150
Coppia da fermo termica
M0*
Nm
1900
Corrente da fermo termica
I 0*
A
100
Costante di coppia a 20 °C
kT,20
Nm/A
18
Costante di tensione
kE
V/(1000/
min)
1091
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
27,2
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
42
Coppia di riposo
MCOG
Nm
13
Costanti fisiche
Massa dello statore
mS
kg
97,9
Massa del rotore
mL
kg
39,6
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
245
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6190
Sigla
identificativa
Unità
-xxB20-0Wxx
Momento d'inerzia del rotore
JL
10-2 kgm2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
mH
1,1
QH,MAX
kW
8,09
132
0,106
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
12,8
Incremento di temperatura del refrigerante
ΔTH
K
9,1
Caduta di pressione
ΔpH
bar
2,8
kW
0,873
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
QP,MAX
P,MIN
l/min
4,7
Incremento di temperatura del refrigerante
ΔTP
K
2,6
Caduta di pressione
ΔpH
bar
2,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
246
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6190-xxx20-xxxx
):[[%*[[
&RSSLD9HORFLW¢
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%:[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
247
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2.6
1FW6230-xxxxx-xxxx
Foglio dati 1FW6230-xxB05-xxxx
Tabella 14- 31
1FW6230-xxB05-1Jxx, 1FW6230-xxB05-2Jxx, 1FW6230-xxB05-5Gxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB05-1Jxx
-xxB05-2Jxx
-xxB05-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
799
774
660
Corrente nominale
IN
A
15
22
40
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
69
110
290
Potenza dissipata nominale
PV,N
kW
3,54
3,65
3,58
Coppia massima
MMAX
Nm
1320
1320
1320
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
45
100
17,3
21
34,1
giri/min
34
59
160
giri/min
130
190
410
Coppia con n = 1 [1/min]
M0
Nm
841
841
841
Corrente con M0 e n = 1 [1/min]
I0
A
16
24
53
Coppia da fermo termica
M0*
Nm
594
594
594
Corrente da fermo termica
I 0*
A
11
16
36
Costante di coppia a 20 °C
kT,20
Nm/A
52,7
36,9
16,7
Costante di tensione
kE
V/(1000/
min)
3188
2231
1011
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
15
14,8
14,9
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
49
49
49
Coppia di riposo
MCOG
Nm
4,2
4,2
4,2
Costanti fisiche
Massa dello statore
mS
kg
31,9
31,9
31,9
Massa del rotore
mL
kg
12,9
12,9
12,9
Momento d'inerzia del rotore
JL
10-2 kgm2
62,2
62,2
62,2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,95
1,49
0,299
Induttanza di linea dell'avvolgimento
LSTR
mH
26,9
13,2
2,7
QH,MAX
kW
2,66
2,74
2,68
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
248
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Flusso volumetrico minimo consigliato
H,MIN
Unità
-xxB05-1Jxx
-xxB05-2Jxx
-xxB05-5Gxx
l/min
4,8
4,8
4,8
Incremento di temperatura del refrigerante
ΔTH
K
8
8,2
8,1
Caduta di pressione
ΔpH
bar
0,5
0,5
0,5
QP,MAX
kW
0,287
0,295
0,29
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
1,6
1,6
1,6
Incremento di temperatura del refrigerante
ΔTP
K
2,6
2,6
2,6
Caduta di pressione
ΔpH
bar
0,5
0,5
0,5
P,MIN
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
249
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6230-xxx05-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
250
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6230-xxB07-xxxx
Tabella 14- 32
1FW6230-xxB07-1Jxx, 1FW6230-xxB07-2Jxx, 1FW6230-xxB07-5Gxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB07-1Jxx
-xxB07-2Jxx
-xxB07-5Gxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
1140
1120
1010
Corrente nominale
IN
A
16
22
44
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
45
73
190
Potenza dissipata nominale
PV,N
kW
4,47
4,61
4,52
Coppia massima
MMAX
Nm
1840
1840
1840
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
31
45
100
19,4
23,6
36,9
giri/min
19
38
110
giri/min
93
130
290
Coppia con n = 1 [1/min]
M0
Nm
1180
1180
1180
Corrente con M0 e n = 1 [1/min]
I0
A
16
24
53
Coppia da fermo termica
M0*
Nm
832
832
832
Corrente da fermo termica
I 0*
A
11
16
36
Costante di coppia a 20 °C
kT,20
Nm/A
73,8
51,7
23,4
Costante di tensione
kE
V/(1000/
min)
4463
3124
1415
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
18,7
18,4
18,6
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
49
49
49
Coppia di riposo
MCOG
Nm
5,9
5,9
5,9
Costanti fisiche
Massa dello statore
mS
kg
41,4
41,4
41,4
Massa del rotore
mL
kg
17,4
17,4
17,4
Momento d'inerzia del rotore
JL
10-2 kgm2
84,3
84,3
84,3
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
3,73
1,88
0,379
Induttanza di linea dell'avvolgimento
LSTR
mH
37,3
18,3
3,7
QH,MAX
kW
3,36
3,46
3,39
l/min
6,1
6,1
6,1
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
7,9
8,1
7,9
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
251
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB07-1Jxx
-xxB07-2Jxx
-xxB07-5Gxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,362
0,373
0,366
l/min
kW
2,1
2,1
2,1
Incremento di temperatura del refrigerante
ΔTP
K
2,4
2,5
2,5
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 33
1FW6230-xxB07-8Fxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB07-8Fxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
923
Corrente nominale
IN
A
56
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
290
Potenza dissipata nominale
PV,N
kW
4,53
Coppia massima
MMAX
Nm
1840
Corrente massima
IMAX
A
130
Potenza elettrica del motore con MMAX
PEL,MAX
kW
46,3
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
160
Numero di giri a vuoto
nMAX,0
giri/min
410
Coppia con n = 1 [1/min]
M0
Nm
1180
Corrente con M0 e n = 1 [1/min]
I0
A
74
Coppia da fermo termica
M0*
Nm
832
Corrente da fermo termica
I 0*
A
50
Costante di coppia a 20 °C
kT,20
Nm/A
16,9
Costante di tensione
kE
V/(1000/
min)
1020
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
18,6
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
49
Coppia di riposo
MCOG
Nm
5,9
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Massa dello statore
mS
kg
41,4
Massa del rotore
mL
kg
17,4
252
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB07-8Fxx
Momento d'inerzia del rotore
JL
10-2 kgm2
84,3
0,197
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
mH
1,9
QH,MAX
kW
3,4
l/min
6,1
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8
Caduta di pressione
ΔpH
bar
0,8
kW
0,367
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
l/min
2,1
Incremento di temperatura del refrigerante
ΔTP
K
2,5
Caduta di pressione
ΔpH
bar
0,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
253
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6230-xxx07-xxxx
):[[%-[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%*[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
254
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6230-xxB10-xxxx
Tabella 14- 34
1FW6230-xxB10-2Jxx, 1FW6230-xxB10-5Gxx, 1FW6230-xxB10-8Fxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB10-2Jxx
-xxB10-5Gxx -xxB10-8Fxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
1630
1520
1450
Corrente nominale
IN
A
23
48
62
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
46
130
190
Potenza dissipata nominale
PV,N
kW
6,05
6,09
5,95
Coppia massima
MMAX
Nm
2630
2630
2630
Corrente massima
IMAX
A
Potenza elettrica del motore con MMAX
PEL,MAX
kW
Numero di giri max. con coppia massima
nMAX,MMAX
Numero di giri a vuoto
nMAX,0
Condizioni marginali
Dati nel punto di misura
Dati limite
45
100
130
27,1
42
50,6
giri/min
21
74
110
giri/min
93
210
290
1680
1680
1680
24
54
74
1190
1190
1190
16
37
50
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
73,8
32,7
24,1
Costante di tensione
kE
V/(1000/
min)
4463
1976
1457
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
23
22,9
23,2
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
49
49
49
Coppia di riposo
MCOG
Nm
8,4
8,4
8,4
Costanti fisiche
Massa dello statore
mS
kg
57,5
57,5
57,5
Massa del rotore
mL
kg
24,3
24,3
24,3
Momento d'inerzia del rotore
JL
10-2 kgm2
118
118
118
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
2,47
0,488
0,259
Induttanza di linea dell'avvolgimento
LSTR
mH
25,9
5,1
2,8
QH,MAX
kW
4,54
4,58
4,47
8
8
8
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
l/min
Incremento di temperatura del refrigerante
ΔTH
K
8,2
8,2
8,1
Caduta di pressione
ΔpH
bar
1,3
1,3
1,3
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
255
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB10-2Jxx
-xxB10-5Gxx -xxB10-8Fxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,490
0,493
0,482
l/min
kW
2,9
2,9
2,9
Incremento di temperatura del refrigerante
ΔTP
K
2,4
2,4
2,4
Caduta di pressione
ΔpH
bar
1,3
1,3
1,3
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 35
1FW6230-xxB10-2Pxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB10-2Pxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
1320
Corrente nominale
IN
A
80
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
290
Potenza dissipata nominale
PV,N
kW
6,1
Coppia massima
MMAX
Nm
2630
Corrente massima
IMAX
A
190
Potenza elettrica del motore con MMAX
PEL,MAX
kW
65,4
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
160
Numero di giri a vuoto
nMAX,0
giri/min
410
Coppia con n = 1 [1/min]
M0
Nm
1680
Corrente con M0 e n = 1 [1/min]
I0
A
100
Coppia da fermo termica
M0*
Nm
1190
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
16,9
Costante di tensione
kE
V/(1000/
min)
1020
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
22,9
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
49
Coppia di riposo
MCOG
Nm
8,4
Condizioni marginali
Dati nel punto di misura
Dati limite
72
Costanti fisiche
Massa dello statore
mS
kg
57,5
Massa del rotore
mL
kg
24,3
256
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB10-2Pxx
Momento d'inerzia del rotore
JL
10-2 kgm2
118
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,13
Induttanza di linea dell'avvolgimento
LSTR
mH
1,4
QH,MAX
kW
4,58
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
l/min
8
Incremento di temperatura del refrigerante
ΔTH
K
8,3
Caduta di pressione
ΔpH
bar
1,3
kW
0,494
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
l/min
2,9
Incremento di temperatura del refrigerante
ΔTP
K
2,5
Caduta di pressione
ΔpH
bar
1,3
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
257
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6230-xxx10-xxxx
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%-[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
&RSSLDGLIUHQDWXUD0 %5LQ1P
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%)[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
258
9HORFLW¢QLQJLULPLQ
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6230-xxB15-xxxx
Tabella 14- 36
1FW6230-xxB15-4Cxx, 1FW6230-xxB15-5Gxx, 1FW6230-xxB15-8Fxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB15-4Cxx
-xxB15-5Gxx -xxB15-8Fxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
2440
2380
2310
Corrente nominale
IN
A
32
49
66
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
43
80
120
Potenza dissipata nominale
PV,N
kW
8,51
8,29
8,31
Coppia massima
MMAX
Nm
3950
3950
3950
Corrente massima
IMAX
A
63
100
130
Potenza elettrica del motore con MMAX
PEL,MAX
kW
38
47,4
57,3
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
19
44
67
Numero di giri a vuoto
nMAX,0
giri/min
87
140
190
2520
2520
2520
33
53
74
1780
1780
1780
23
36
50
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
79,1
50,2
36,2
Costante di tensione
kE
V/(1000/
min)
4782
3033
2186
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
29,1
29,4
29,4
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
49
49
49
Coppia di riposo
MCOG
Nm
13
13
13
Costanti fisiche
Massa dello statore
mS
kg
82,1
82,1
82,1
Massa del rotore
mL
kg
35,7
35,7
35,7
Momento d'inerzia del rotore
JL
10-2 kgm2
173
173
173
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
1,77
0,695
0,362
Induttanza di linea dell'avvolgimento
LSTR
mH
19,7
7,9
4,1
QH,MAX
kW
6,39
6,23
6,24
l/min
10,5
10,5
10,5
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,7
8,5
8,5
Caduta di pressione
ΔpH
bar
2,2
2,2
2,2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
259
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
QP,MAX
kW
-xxB15-4Cxx
-xxB15-5Gxx -xxB15-8Fxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
P,MIN
l/min
0,69
0,672
0,673
4
4
4
Incremento di temperatura del refrigerante
ΔTP
K
2,5
2,4
2,4
Caduta di pressione
ΔpH
bar
2,2
2,2
2,2
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 37
1FW6230-xxB15-2Pxx, 1FW6230-xxB15-0Wxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB15-2Pxx
-xxB15-0Wxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
2190
2020
Corrente nominale
IN
A
90
110
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
180
270
Potenza dissipata nominale
PV,N
kW
8,53
8,31
Coppia massima
MMAX
Nm
3950
3950
Corrente massima
IMAX
A
190
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
72,5
91,2
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
100
150
Numero di giri a vuoto
nMAX,0
giri/min
270
380
Coppia con n = 1 [1/min]
M0
Nm
2520
2520
Corrente con M0 e n = 1 [1/min]
I0
A
100
140
Coppia da fermo termica
M0*
Nm
1780
1780
Corrente da fermo termica
I 0*
A
72
100
Costante di coppia a 20 °C
kT,20
Nm/A
25,3
18,1
Costante di tensione
kE
V/(1000/
min)
1530
1093
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
29
29,4
Costante di tempo termica
tTH
s
180
180
N. di coppie di poli
p
-
49
49
Coppia di riposo
MCOG
Nm
13
13
Massa dello statore
mS
kg
82,1
83,7
Massa del rotore
mL
kg
35,7
35,7
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
260
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
Momento d'inerzia del rotore
JL
10-2 kgm2
-xxB15-2Pxx
-xxB15-0Wxx
173
173
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,182
0,0904
Induttanza di linea dell'avvolgimento
LSTR
mH
2
1
QH,MAX
kW
6,4
6,24
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
10,5
10,5
Incremento di temperatura del refrigerante
ΔTH
K
8,8
8,5
Caduta di pressione
ΔpH
bar
2,2
2,2
QP,MAX
kW
0,691
0,673
4
4
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
P,MIN
l/min
Incremento di temperatura del refrigerante
ΔTP
K
2,5
2,4
Caduta di pressione
ΔpH
bar
2,2
2,2
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
261
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6230-xxx15-xxxx
):[[%*[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%&[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%)[[
&RSSLD9HORFLW¢
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%:[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
262
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9LQOPLQ
263
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6230-xxB20-xxxx
Tabella 14- 38
1FW6230-xxB20-5Gxx, 1FW6230-xxB20-8Fxx, 1FW6230-xxB20-2Pxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB20-5Gxx
-xxB20-8Fxx
-xxB20-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
3230
3160
3050
Corrente nominale
IN
A
51
69
94
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
56
84
130
Potenza dissipata nominale
PV,N
kW
10,7
10,7
11
Coppia massima
MMAX
Nm
5260
5260
5260
Corrente massima
IMAX
A
100
130
190
Potenza elettrica del motore con MMAX
PEL,MAX
kW
53,5
63,7
79,4
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
29
47
74
Numero di giri a vuoto
nMAX,0
giri/min
100
140
200
3360
3360
3360
53
74
100
2380
2380
2380
36
50
72
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
66,9
48,2
33,7
Costante di tensione
kE
V/(1000/
min)
4044
2915
2040
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
34,6
34,6
34,2
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
49
49
49
Coppia di riposo
MCOG
Nm
17
17
17
Costanti fisiche
Massa dello statore
mS
kg
106,7
106,7
106,7
Massa del rotore
mL
kg
47,1
47,1
47,1
Momento d'inerzia del rotore
JL
10-2
228
228
228
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,892
0,465
0,233
Induttanza di linea dell'avvolgimento
LSTR
mH
10,5
5,5
2,7
QH,MAX
kW
8
8,02
8,22
l/min
13
13
13
kgm2
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,8
8,9
9,1
Caduta di pressione
ΔpH
bar
3,4
3,4
3,4
264
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB20-5Gxx
-xxB20-8Fxx
-xxB20-2Pxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
0,863
0,865
0,887
l/min
kW
5,1
5,1
5,1
Incremento di temperatura del refrigerante
ΔTP
K
2,4
2,4
2,5
Caduta di pressione
ΔpH
bar
3,4
3,4
3,4
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Tabella 14- 39
1FW6230-xxB20-0Wxx
Dati tecnici
1FW6230
Sigla
identificativa
Unità
-xxB20-0Wxx
Tensioni del circuito intermedio
UZK
V
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
Temperatura nominale dell'avvolgimento
TN
°C
130
Coppia nominale
MN
Nm
2890
Corrente nominale
IN
A
120
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
190
Potenza dissipata nominale
PV,N
kW
10,7
Coppia massima
MMAX
Nm
5260
Corrente massima
IMAX
A
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
98,1
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
110
Numero di giri a vuoto
nMAX,0
giri/min
290
Coppia con n = 1 [1/min]
M0
Nm
3360
Corrente con M0 e n = 1 [1/min]
I0
A
140
Coppia da fermo termica
M0*
Nm
2380
Corrente da fermo termica
I 0*
A
100
Costante di coppia a 20 °C
kT,20
Nm/A
24,1
Costante di tensione
kE
V/(1000/
min)
1457
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
34,6
Costante di tempo termica
tTH
s
180
N. di coppie di poli
p
-
49
Coppia di riposo
MCOG
Nm
17
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Massa dello statore
mS
kg
108,3
Massa del rotore
mL
kg
47,1
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
265
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6230
Sigla
identificativa
Unità
Momento d'inerzia del rotore
JL
10-2 kgm2
-xxB20-0Wxx
228
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
Induttanza di linea dell'avvolgimento
LSTR
mH
0,116
1,4
QH,MAX
kW
8,02
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
13
Incremento di temperatura del refrigerante
ΔTH
K
8,9
Caduta di pressione
ΔpH
bar
3,4
kW
0,865
H,MIN
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
QP,MAX
P,MIN
l/min
5,1
Incremento di temperatura del refrigerante
ΔTP
K
2,4
Caduta di pressione
ΔpH
bar
3,4
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
266
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6230-xxx20-xxxx
):[[%)[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%*[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
):[[%:[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%3[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
267
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
14.2.7
1FW6290-xxxxx-xxxx
Foglio dati 1FW6290-xxB07-xxxx
Tabella 14- 40
1FW6290-xxB07-5Gxx, 1FW6290-xxB07-0Lxx, 1FW6290-xxB07-2Pxx
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB07-5Gxx -xxB07-0Lxx
-xxB07-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
2060
1910
1810
Corrente nominale
IN
A
52
86
100
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
110
210
270
Potenza dissipata nominale
PV,N
kW
5,19
5,19
5,2
Coppia massima
MMAX
Nm
4000
4000
4000
Corrente massima
IMAX
A
110
210
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
47,7
70,6
85,4
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
59
110
150
Numero di giri a vuoto
nMAX,0
giri/min
160
280
360
2220
2220
2220
56
100
120
1570
1570
1570
39
70
90
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
39,8
22,4
17,4
Costante di tensione
kE
V/(1000/
min)
2405
1352
1053
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
31,2
31,2
31,2
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
11
11
11
Costanti fisiche
Massa dello statore
mS
kg
72,6
72,6
77,8
Massa del rotore
mL
kg
31
31
31
JL
10-2
228
228
228
Momento d'inerzia del rotore
kgm2
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,389
0,123
0,0747
Induttanza di linea dell'avvolgimento
LSTR
mH
6,4
2
1,2
QH,MAX
kW
3,9
3,9
3,91
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
268
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6290
Sigla
identificativa
Flusso volumetrico minimo consigliato
H,MIN
Unità
-xxB07-5Gxx -xxB07-0Lxx
-xxB07-2Pxx
l/min
5,8
5,8
5,8
Incremento di temperatura del refrigerante
ΔTH
K
9,7
9,7
9,7
Caduta di pressione
ΔpH
bar
0,4
0,4
0,4
QP,MAX
kW
0,42
0,42
0,421
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
l/min
2,2
2,2
2,2
Incremento di temperatura del refrigerante
ΔTP
K
2,7
2,7
2,7
Caduta di pressione
ΔpH
bar
0,4
0,4
0,4
P,MIN
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
269
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6290-xxx07-xxxx
):[[%*[[
&RSSLD9HORFLW¢
):[[%/[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
270
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6290-xxB11-xxxx
Tabella 14- 41
1FW6290-xxB11-7Axx, 1FW6290-xxB11-0Lxx, 1FW6290-xxB11-2Pxx
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB11-7Axx
-xxB11-0Lxx
-xxB11-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
3320
3200
3100
Corrente nominale
IN
A
59
91
110
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
73
130
170
Potenza dissipata nominale
PV,N
kW
7,13
7,14
7,16
Coppia massima
MMAX
Nm
6280
6280
6280
Corrente massima
IMAX
A
130
210
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
58
78,2
93,2
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
40
71
93
Numero di giri a vuoto
nMAX,0
giri/min
110
180
230
3490
3490
3490
62
100
120
2470
2470
2470
44
70
90
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
Costante di coppia a 20 °C
kT,20
Nm/A
56,1
35,1
27,4
Costante di tensione
kE
V/(1000/
min)
3393
2124
1655
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
41,9
41,8
41,8
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
17
17
17
Costanti fisiche
Massa dello statore
mS
kg
114
114
119,2
Massa del rotore
mL
kg
45
45
45
Momento d'inerzia del rotore
JL
10-2
334
334
334
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,43
0,169
0,103
Induttanza di linea dell'avvolgimento
LSTR
mH
8
3,1
1,9
QH,MAX
kW
5,35
5,36
5,38
l/min
8,6
8,6
8,6
kgm2
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
Caduta di pressione
ΔpH
bar
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9
9
9
0,8
0,8
0,8
271
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB11-7Axx
-xxB11-0Lxx
-xxB11-2Pxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
QP,MAX
P,MIN
0,577
0,578
0,58
l/min
kW
3,4
3,4
3,4
Incremento di temperatura del refrigerante
ΔTP
K
2,4
2,4
2,4
Caduta di pressione
ΔpH
bar
0,8
0,8
0,8
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
272
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6290-xxx11-xxxx
):[[%/[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%$[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9HORFLW¢QLQJLULPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
9LQOPLQ
273
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6290-xxB15-xxxx
Tabella 14- 42
1FW6290-xxB15-7Axx, 1FW6290-xxB15-0Lxx, 1FW6290-xxB15-2Pxx
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB15-7Axx
-xxB15-0Lxx
-xxB15-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
130
Coppia nominale
MN
Nm
4590
4480
4390
Corrente nominale
IN
A
61
94
110
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
53
89
120
Potenza dissipata nominale
PV,N
kW
9,08
9,09
9,12
Coppia massima
MMAX
Nm
8570
8570
8570
Corrente massima
IMAX
A
130
210
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
65,2
85,2
101
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
28
50
67
Numero di giri a vuoto
nMAX,0
giri/min
85
130
170
4760
4760
4760
64
100
120
3370
3370
3370
Condizioni marginali
Dati nel punto di misura
Dati limite
Coppia con n = 1 [1/min]
M0
Nm
Corrente con M0 e n = 1 [1/min]
I0
A
Coppia da fermo termica
M0*
Nm
Corrente da fermo termica
I 0*
A
44
70
90
Costante di coppia a 20 °C
kT,20
Nm/A
75
47,9
37,3
Costante di tensione
kE
V/(1000/
min)
4533
2896
2257
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
50,6
50,5
50,5
Costante di tempo termica
tTH
s
180
180
180
N. di coppie di poli
p
-
42
42
42
Coppia di riposo
MCOG
Nm
24
24
24
Costanti fisiche
Massa dello statore
mS
kg
155,6
155,6
160,8
Massa del rotore
mL
kg
59
59
59
Momento d'inerzia del rotore
JL
10-2
440
440
440
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,526
0,215
0,131
Induttanza di linea dell'avvolgimento
LSTR
mH
10,4
4,2
2,6
QH,MAX
kW
6,82
6,83
6,85
l/min
12,8
12,8
12,8
kgm2
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
7,7
7,7
7,7
Caduta di pressione
ΔpH
bar
1,8
1,8
1,8
274
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB15-7Axx
-xxB15-0Lxx
-xxB15-2Pxx
0,736
0,737
0,739
5,2
5,2
5,2
2
2
2
1,8
1,8
1,8
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
P,MIN
kW
l/min
Incremento di temperatura del refrigerante
ΔTP
K
Caduta di pressione
ΔpH
bar
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
275
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Curve caratteristiche dei motori 1FW6290-xxx15-xxxx
):[[%/[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
):[[%$[[
&RSSLD9HORFLW¢
9HORFLW¢QLQJLULPLQ
9HORFLW¢QLQJLULPLQ
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
˂SLQEDU
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
9HORFLW¢QLQJLULPLQ
276
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Foglio dati 1FW6290-xxB20-xxxx
Tabella 14- 43
1FW6290-xxB20-0Lxx, 1FW6290-xxB20-2Pxx
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB20-0Lxx
-xxB20-2Pxx
Tensioni del circuito intermedio
UZK
V
600
600
Temp. di mandata del raffreddamento ad acqua
TVORL
°C
35
35
Temperatura nominale dell'avvolgimento
TN
°C
130
130
Coppia nominale
MN
Nm
5760
5670
Corrente nominale
IN
A
95
120
Numero di giri max. con coppia nominale
nMAX,MN
giri/min
68
91
Potenza dissipata nominale
PV,N
kW
11
11,1
Coppia massima
MMAX
Nm
10900
10900
Corrente massima
IMAX
A
210
270
Potenza elettrica del motore con MMAX
PEL,MAX
kW
91,9
10,7
Numero di giri max. con coppia massima
nMAX,MMAX
giri/min
38
51
Numero di giri a vuoto
nMAX,0
giri/min
100
130
Coppia con n = 1 [1/min]
M0
Nm
6030
6030
Corrente con M0 e n = 1 [1/min]
I0
A
100
120
Coppia da fermo termica
M0*
Nm
4260
4260
Corrente da fermo termica
I 0*
A
70
90
Costante di coppia a 20 °C
kT,20
Nm/A
60,7
47,3
Costante di tensione
kE
V/(1000/
min)
3669
2859
Costante del motore a 20 °C
kM,20
Nm/(W)0,5
58,1
58
Costante di tempo termica
tTH
s
180
180
N. di coppie di poli
p
-
42
42
Coppia di riposo
MCOG
Nm
30
30
Condizioni marginali
Dati nel punto di misura
Dati limite
Costanti fisiche
Massa dello statore
mS
kg
187,6
192,8
Massa del rotore
mL
kg
73
73
Momento d'inerzia del rotore
JL
10-2
546
546
Resistenza di linea dell'avvolgimento a 20 °C
RSTR, 20
Ω
0,261
0,159
Induttanza di linea dell'avvolgimento
LSTR
mH
5,4
3,2
QH,MAX
kW
8,3
8,32
l/min
14,1
14,1
kgm2
Dati del radiatore principale del motore *)
Max. potenza termica dissipata
Flusso volumetrico minimo consigliato
H,MIN
Incremento di temperatura del refrigerante
ΔTH
K
8,4
8,5
Caduta di pressione
ΔpH
bar
2,2
2,2
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
277
Dati tecnici e curve caratteristiche
14.2 Fogli dati e diagrammi
Dati tecnici
1FW6290
Sigla
identificativa
Unità
-xxB20-0Lxx
-xxB20-2Pxx
Dati del radiatore di precisione del motore *)
Max. potenza termica dissipata
QP,MAX
Flusso volumetrico minimo consigliato
kW
P,MIN
0,895
0,897
l/min
5,9
5,9
Incremento di temperatura del refrigerante
ΔTP
K
2,2
2,2
Caduta di pressione
ΔpH
bar
2,2
2,2
*) Collegamento in parallelo del radiatore principale del motore e del radiatore di precisione del motore
Curve caratteristiche dei motori 1FW6290-xxx20-xxxx
):[[%/[[
&RSSLD9HORFLW¢
):[[%3[[
&RSSLD9HORFLW¢
&RSSLD0LQ1P
&RSSLD0LQ1P
9HORFLW¢QLQJLULPLQ
&RSSLDGLIUHQDWXUD0 %5LQ1P
&RSSLDGLIUHQDWXUDGLFRUWRFLUFXLWR1XPHURGLJLUL
˂SLQEDU
9HORFLW¢QLQJLULPLQ
278
5DGLDWRUHSULQFLSDOHHUDGLDWRUHGLSUHFLVLRQH+.H3.
3HUGLWHGLSUHVVLRQH)OXVVRYROXPHWULFR
9HORFLW¢QLQJLULPLQ
5DGLDWRUHSULQFLSDOHH
UDGLDWRUHGLSUHFLVLRQH
LQSDUDOOHOR
6RORUDGLDWRUHSULQFLSDOH
6RORUDGLDWRUHGL
SUHFLVLRQH
9LQOPLQ
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
15
Schemi di installazione / disegni quotati
15.1
Caso di installazione di motori con camicia di raffreddamento
Avvertenze per la realizzazione del foro di installazione e per il montaggio dell'O-ring
● Prevedere uno smusso d'ingresso: lunghezza minima Z a 15°: 3 mm, a 20°: 2 mm, spigoli
arrotondati e rifiniti
Sbavare e arrotondare le forature interne (raccordi per il liquido di raffreddamento)
● Finitura delle superfici di tenuta opposte: Rmax ≤ 16 µm, Rz ≤ 10 µm, Ra ≤ 1,6 µm
● Fare attenzione all'accoppiamento del foro di installazione (H8). Se il gioco è troppo
ampio, la tenuta dell'O-ring non è garantita o viene superata la larghezza del traferro
ammessa.
DUURWRQGDWRHOXFLGDWR
VEDYDWRHDUURWRQGDWR
Figura 15-1
Avvertenze per la realizzazione del foro di installazione e per il montaggio dell'O-ring
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
279
Schemi di installazione / disegni quotati
15.2 Spiegazione degli schemi di installazione
15.2
Spiegazione degli schemi di installazione
Dimensioni d'ingombro
Per la costruzione occorre tenere presenti i seguenti dati.
Figura 15-2
Dati di geometria dei motori Torque integrati 1FW6
Spiegazione delle sigle utilizzate nella figura "Dati di geometria dei motori Torque integrati
1FW6":
L_St
280
lunghezza dello statore
L_Ro
lunghezza del rotore
Dz_Sr
diametro del foro di centratura sullo statore
Da_Mot
diametro esterno del motore
De_Sm
diametro del foro per la vite di fissaggio sul rotore
De_KSr
diametro del foro per la vite di fissaggio sullo statore
Di_Be
diametro interno statore
Dz_Si
diametro del foro di centratura sul rotore
D_Si
diametro interno rotore
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Schemi di installazione / disegni quotati
15.2 Spiegazione degli schemi di installazione
Nota
La Siemens AG si riserva la facoltà di apportare, senza alcun preavviso, modifiche alle
dimensioni dei motori al fine di migliorare il prodotto. I disegni quotati contenuti nel presente
manuale potrebbero quindi non essere aggiornati.
I disegni quotati aggiornati si possono richiedere gratuitamente.
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
281
Figura 15-3
282
0RWRUH
7RUTXH
/XQJKH]]D
VWDWRUH
/XQJKH]]D /DUJKH]]DVFDQDODWX
URWRUH
UDGLUDIIUHGGDPHQWR
,PRWRULVRQRSURJHWWDWLSHUO
LQVWDOOD]LRQHLQXQDFFRSSLDPHQWR+8QHYHQWXDOHHUURUH
GLFLUFRODULW¢GHOPRWRUHQHOORVWDWRGLIRUQLWXUDªUHYHUVLELOHHQRUPDOPHQWHQRQª
ULOHYDQWHDLILQLGHOPRQWDJJLR5LVSHWWDUHOHLVWUX]LRQLGLPRQWDJJLR
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
7XWWHOHPLVXUHLQPP
*OL2ULQJIDQQRSDUWHGHOODIRUQLWXUD
6FDQDODWXUH2ULQJ
15.3
3RVL]LRQHGLPRQWDJJLR
GLULIHULPHQWR
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHR
WDQJHQ]LDOH
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
Schemi di installazione / disegni quotati
1FW6090-xxB
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Figura 15-4
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
7XWWHOHPLVXUHLQPP
6FDQDODWXUHSHU
2ULQJ
3RVL]LRQHGLPRQWDJJLR
GLULIHULPHQWR
0RWRUH
7RUTXH
/XQJKH]]D /XQJKH]]D /DUJKH]]DVFDQDOD
VWDWRUH
URWRUH
WXUDGLUDIIUHGGDPHQWR
,PRWRULVRQRSURJHWWDWLSHUO
LQVWDOOD]LRQHLQXQDFFRSSLDPHQWR+8QHYHQWXDOHHUURUH
GLFLUFRODULW¢GHOPRWRUHQHOORVWDWRGLIRUQLWXUDªUHYHUVLELOHHQRUPDOPHQWHQRQª
ULOHYDQWHDLILQLGHOPRQWDJJLR5LVSHWWDUHOHLVWUX]LRQLGLPRQWDJJLR
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
*OL2ULQJIDQQRSDUWHGHOODIRUQLWXUD
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHR
WDQJHQ]LDOH
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
1FW6130-xxB
283
Figura 15-5
284
7XWWHOHPLVXUHLQPP
6FDQDODWXUD
2ULQJ
0[SURIRQGLW¢
0RWRUH
7RUTXH
/XQJKH]]D
URWRUH
*OL2ULQJIDQQRSDUWHGHOODIRUQLWXUD
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
,PRWRULVRQRSURJHWWDWLSHUO
LQVWDOOD]LRQHLQXQDFFRSSLDPHQWR+8QHYHQWXDOHHUURUH
GLFLUFRODULW¢GHOPRWRUHQHOORVWDWRGLIRUQLWXUDªUHYHUVLELOHHQRUPDOPHQWHQRQª
ULOHYDQWHDLILQLGHOPRQWDJJLR5LVSHWWDUHOHLVWUX]LRQLGLPRQWDJJLR
/XQJKH]]D
VWDWRUH
6FDQDODWXUD2ULQJ
0[SURIRQGLW¢
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHR
WDQJHQ]LDOH
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
1FW6150-xxB (lunghezza parte attiva 05 e 07)
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Figura 15-6
6FDQDODWXUD2ULQJ
0[
SURIRQGLW¢
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
7XWWHOHPLVXUHLQPP
0RWRUH7RUTXH
/XQJKH]]D
URWRUH
*OL2ULQJIDQQRSDUWHGHOOD
IURQLWXUD
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHR
WDQJHQ]LDOH
,PRWRULVRQRSURJHWWDWLSHUO
LQVWDOOD]LRQHLQXQDFFRSSLDPHQWR+8QHYHQWXDOHHUURUH
GLFLUFRODULW¢GHOPRWRUHQHOORVWDWRGLIRUQLWXUDªUHYHUVLELOHHQRUPDOPHQWHQRQª
ULOHYDQWHDLILQLGHOPRQWDJJLR5LVSHWWDUHOHLVWUX]LRQLGLPRQWDJJLR
/XQJKH]]D
VWDWRUH
6FDQDODWXUD2ULQJ
0[SURIRQGLW¢
0[SURIRQGLW¢
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
1FW6150-xxB (lunghezza parte attiva 10 e 15)
285
Figura 15-7
286
0SURIRQGLW¢GLDYYLWDPHQWR
,QWDJOLR
7XWWHOHPLVXUHLQPP
/
HUURUHGLFRQFHQWULFLW¢GHL
GLDPHWULQRQGHYHVXSHUDUH
PPGRSRLOPRQWDJJLR
3RVL]LRQHGL
PRQWDJJLR
GLULIHULPHQWR
*SURIRQGLW¢
):[[%-[[
):[[%*[[
):[[%)[[
):[[%3[[
):[[%:[[
):[[%*[[
):[[%)[[
):[[%3[[
):[[%:[[
):[[%-[[
):[[%-[[
):[[%*[[
):[[%-[[
):[[%-[[
):[[%*[[
):[[%)[[
):[[%-[[
):[[%-[[
):[[%*[[
):[[%)[[
):[[%3[[
0
SURIRQGLW¢
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
0/)%
/B6W
/B5R
5DGLDWRUHGLSUHFLVLRQH
5DGLDWRUHSULQFLSDOH
,QWDJOLR
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
0/)%
/B6W
/B5R
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHRWDQJHQ]LDOH
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
)RURSHUFRODWD
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
+SURIRQGLW¢[
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
1FW6160-xxB
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Figura 15-8
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
0SURIRQGLW¢GLDYYLWDPHQWR
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
,QWDJOLR
7XWWHOHPLVXUHLQPP
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
*SURIRQGLW¢
):[[%-[[
):[[%*[[
):[[%)[[
):[[%3[[
):[[%:[[
):[[%*[[
):[[%)[[
):[[%3[[
):[[%:[[
):[[%-[[
):[[%-[[
):[[%*[[
):[[%-[[
):[[%-[[
):[[%*[[
):[[%)[[
):[[%-[[
):[[%-[[
):[[%*[[
):[[%)[[
):[[%3[[
0SURIRQGLW¢
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
0/)%
/B6W
/B5R
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
5DGLDWRUHGLSUHFLVLRQH
5DGLDWRUH
SULQFLSDOH
,QWDJOLR
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
0/)%/B6W /B5R
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHRWDQJHQ]LDOH
)RURSHUFRODWD
+SURIRQGLW¢
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
1FW6190-xxB
287
Figura 15-9
288
)RURSHUFRODWD
,QWDJOLR
7XWWHOHPLVXUHLQPP
5DGLDWRUHSULQFLSDOH
0SURIRQGLW¢
):[[[3[[
):[[[&[[
):[[[*[[
):[[[)[[
):[[[3[[
):[[[:[[
):[[[*[[
):[[[)[[
):[[[3[[
):[[[:[[
):[[[-[[
):[[[-[[
):[[[*[[
):[[[-[[
):[[[-[[
):[[[*[[
):[[[)[[
):[[[-[[
):[[[*[[
):[[[)[[
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
0/)%
/B6W
/B5R
*SURIRQGLW¢
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
5DGLDWRUHGLSUHFLVLRQH
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
%ORFFRGLFRQQHVVLRQH
RS]LRQDOHDVVLDOHUDGLDOHR
WDQJHQ]LDOH
,QWDJOLR
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
0/)%
/B6W
/B5R
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
0SURIRQGLW¢GLDYYLWDPHQWR
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
+SURIRQGLW¢[
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
1FW6230-xxB
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
5DGLDWRUHGL
SUHFLVLRQH
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
7XWWHOHPLVXUHLQPP
%ORFFRGLFRQQHVVLRQH
RS]LRQDOH
DVVLDOHUDGLDOHR
WDQJHQ]LDOH
5DGLDWRUHSULQFLSDOH
3LDVWUDGLDOODFFLDPHQWR
SHUUHIULJHUDQWH
,QWDJOLR
+SURIRQGLW¢[
3RVL]LRQHGL
PRQWDJJLRGL
ULIHULPHQWR
):[[*[[
):[[/[[
):[[[3[[
):[[$[[
):[[/[[
):[[[3[[
):[[$[[
):[[/[[
):[[[3[[
):[[/[[
):[[[3[[
0/)%/B6W
/B5R
0RWRUH7RUTXH/XQJKH]]DVWDWRUH/XQJKH]]DURWRUH
8OWHULRULLQIRUPD]LRQLVXOFROOHJDPHQWRHOHWWULFRH
HVXOFROOHJDPHQWRGHOUDGLDWRUHVRQRFRQWHQXWHQHO
0DQXDOHGLSURJHWWD]LRQH
/
HUURUHGLFRQFHQWULFLW¢GHLGLDPHWUL
QRQGHYHVXSHUDUHPPGRSRLOPRQWDJJLR
,QWDJOLR
Schemi di installazione / disegni quotati
15.3 Schemi di installazione / disegni quotati
Figura 15-10 1FW6290-xxB
289
A
Appendice
A.1
Raccomandazioni del costruttore
Avvertenza sui prodotti di terze parti
ATTENZIONE
Questo stampato contiene raccomandazioni su prodotti di terze parti. Si tratta di prodotti di
altri fornitori, di cui conosciamo l'idoneità di massima. Naturalmente si possono utilizzare
prodotti di ulteriori fornitori con caratteristiche analoghe. Le nostre indicazioni devono
essere intese come informazione e non come prescrizione. Siemens non si assume alcuna
responsabilità per la qualità dei prodotti di terze parti.
A.1.1
Fornitori di raccorderie e accessori per sistemi di raffreddamento
Rectus GmbH
Daimlerstraße 7
71735 EBERDINGEN-NUSSDORF - Germania
Tel.: +49 (0) 70 42 - 1 00 - 0
Fax: +49 (0) 70 42 - 1 00 - 147
E-mail: [email protected]
www.rectus.de
Festo AG & Co. KG
Ruiter Straße 82
73734 ESSLINGEN-BERKHEIM - Germania
Tel.: +49 (0) 1 80 - 3 03 11 11
Fax: +49 (0) 7 11 - 3 47 26 28
E-mail: [email protected]
www.festo.com
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
291
Appendice
A.1 Raccomandazioni del costruttore
Serto GmbH
Kasseler Strasse 64
34277 FULDABRÜCK - Germania
Tel.: +49 (0) 5 61 - 5 80 04 - 0
Fax: +49 (0) 5 61 - 5 80 04 - 44
E-mail: [email protected]
www.serto.com
SMC Pneumatik GmbH
Boschring 13 - 15
63329 EGELSBACH - Germania
Tel.: +49 (0) 61 03 - 4 02 - 0
Fax: +49 (0) 61 03 - 4 02 - 1 39
E-mail: [email protected]
www.smc-pneumatik.de
A.1.2
Fornitori di gruppi di raffreddamento
Pfannenberg GmbH
Werner-Witt-Straße 1
21035 HAMBURG - Germania
Tel.: +49 (0) 40 - 7 34 12 - 0
Fax: +49 (0) 40 - 7 34 12 - 1 01
E-mail: [email protected]
www.pfannenberg.de
BKW Kälte-Wärme-Versorgungstechnik GmbH
Benzstraße 2
72649 WOLFSCHLUGEN - Germania
Tel.: +49 (0) 70 22 - 50 03 - 0
Fax: +49 (0) 70 22 - 50 03 - 30
E-mail: [email protected]
www.bkw-kuema.de
Helmut Schimpke und Team Industriekühlanlagen GmbH + Co. KG
Ginsterweg 25 - 27
42781 HAAN - Germania
Tel.: 49 (0) 21 29 - 94 38 - 0
Fax: 49 (0) 21 29 - 94 38 - 99
E-mail: [email protected]
www.schimpke.de
292
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Appendice
A.1 Raccomandazioni del costruttore
Hydac International GmbH
Industriegebiet
66280 SULZBACH/SAAR - Germania
Tel.: +49 (0) 68 97 - 5 09 - 01
E-mail: [email protected]
www.hydac.com
Rittal GmbH & Co. KG
Auf dem Stützelberg
35745 HERBORN - Germania
Tel.: +49 (0) 27 72 - 5 05 - 0
Fax: +49 (0) 27 72 - 5 05 - 23 19
E-mail: [email protected]
www.rittal.de
A.1.3
Fornitori di prodotti anticorrosivi
TYFOROP CHEMIE GmbH
Anton-Rée-Weg 7
20537 HAMBURG - Germania
Tel.: +49 (0) 40 - 61 21 69
Fax: +49 (0) 40 - 61 52 99
E-mail: [email protected]
www.tyfo.de
Clariant Produkte (Deutschland) GmbH
Werk Gendorf
Industrieparkstraße 1
84508 BURGKIRCHEN - Germania
Tel.: +49 (0) 8679 - 7 - 0
Fax: +49 (0) 8679 - 7 - 4545
www.clariant.de
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
293
Appendice
A.1 Raccomandazioni del costruttore
A.1.4
Fornitori di elementi di frenatura
HEMA Maschinen und Apparateschutz GmbH
Seligenstädter Straße 82
63500 SELIGENSTADT - Germania
Tel.: +49 (0) 61 82 - 7 73 - 0
Fax: +49 (0) 61 82 - 7 73 - 35
E-mail: [email protected]
www.hema-schutz.de
Chr. Mayr GmbH + Co. KG
Eichenstraße 1
87665 MAUERSTETTEN - Germania
Tel.: +49 (0) 83 41 - 8 04 - 0
Fax: +49 (0) 83 41 - 8 04 - 4 21
E-mail: [email protected]
www.mayr.de
294
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Appendice
A.2 Modulo fax per proposte/correzioni (modello da copiare)
A.2
Modulo fax per proposte/correzioni (modello da copiare)
Se durante la lettura del manuale doveste trovare qualche errore di stampa, Vi preghiamo
di volercelo comunicare con questo modulo. Vi siamo altresì grati per eventuali
suggerimenti e proposte di miglioramento.
$
6,(0(16$*
,'70&06
3RVWIDFK
'(UODQJHQ
0LWWHQWH
1RPH
,QGLUL]]RGHOODGLWWDGHOO
XIILFLR
9LD &$3
)D[GRFXPHQWD]LRQH
PDLOWRGRFXPRWLRQFRQWURO#VLHPHQVFRP
KWWSZZZVLHPHQVFRPDXWRPDWLRQVHUYLFHVXSSRUW
/RFDOLW¢
7HOHIRQR
)D[
3URSRVWHHRFRUUH]LRQL
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
295
Appendice
A.3 Lista delle abbreviazioni
A.3
296
Lista delle abbreviazioni
BGR
Berufsgenossenschaftliche Regeln; norme relative alla sicurezza e alla salute
sul lavoro vigenti in Germania
BGV
Berufsgenossenschaftliche Vorschriften; prescrizioni obbligatorie per la
sicurezza e la salute sul luogo di lavoro vigenti in Germania; prescrizioni per la
prevenzione degli incidenti
CE
Comunità Europea
CE
Comunità Europea
CEE
Comunità Economica Europea
DAU
DAC (convertitore analogico-digitale)
DIN
Deutsches Institut für Normung
DQ
DRIVE CLiQ
EMC
Compatibilità elettromagnetica EMC
EN
Norma europea
FAQ
Frequently Asked Questions
Fattore
KV
Guadagno proporzionale
FEM
Forza elettromotrice
HFD
Smorzamento delle alte frequenze
HW
Hardware
IATA
International Air Transport Association
IEC
Commissione elettrotecnica internazionale
ink.
WMS
Sistema di misura angolare incrementale, encoder incrementale
IP
International Protection
KTY
Sensore di temperatura con curva caratteristica progressiva quasi lineare
N. di
ordinazi
one
Codice prodotto leggibile da sistemi automatici, numero di ordinazione
NC
Controllo numerico
NCK
Numerical Control Kernel: kernel numerico con preparazione blocco, campo di
posizionamento, ecc.
NE
Alimentatore di rete
PDS
Power Drive System
PE
Protective Earth
PELV
Protective extra low voltage
PLC
Programmable Logic Control
PTC
Sensore di temperatura con coefficiente di temperatura positivo e caratteristica
di "quasi intervento"
RLI
Identificazione della posizione del rotore (anche identificazione della posizione
dei poli); metodo per la determinazione dell'offset dell'angolo di commutazione
S1
Modo operativo "JOG"
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Appendice
A.3 Lista delle abbreviazioni
S2
Modo operativo "Servizio di breve durata"
S3
Modo operativo "Funzionamento intermittente"
SME
Sensor Module External
SW
Software
Temp-F
Circuito di sorveglianza della temperatura per il monitoraggio della temperatura
dell'avvolgimento del motore
Temp-S
Circuito di sorveglianza della temperatura per la disinserzione dell'azionamento
in caso di sovratemperatura
TM
Motore Torque
TN
Terre Neutre
UL
Underwriters Laboratories
Valore
pH
Concentrazione di ioni di idrogeno in un liquido
VDE
Verband der Elektrotechnik, Elektronik und Informationstechnik; Associazione
tedesca degli operatori elettrotecnici, elettronici ed informatici
WMS as Sistema di misura angolare assoluto, encoder assoluto
soluto
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
297
Indice analitico
A
Abbreviazioni, 297
Anomalie di funzionamento
Frenatura, 109
anticorrosivo, 53
approvazioni, 28
Avvertenza di sicurezza
Smaltimento, 173
Avvertenze di sicurezza, 13
Conservazione, 15
Generalità, 13
Avvertenze di sicurezza per il funzionamento, 165
Avvertenze di sicurezza per il montaggio del
motore, 79
Avvertenze di sicurezza per il trasporto,
l'immagazzinaggio e l'imballaggio, 172
Avvertenze di sicurezza relative al collegamento
elettrico, 142
Avvertenze di sicurezza relative alla manutenzione e
alla riparazione, 167
Avvertenze di sicurezza relative alla messa in
servizio, 159
Avvertenze di sicurezza relative allo smaltimento, 174
C
campi magnetici
comparsa, 17
Campi magnetici
intensità, 18
pronto intervento in caso di infortuni, 19
circuiti di raffreddamento
manutenzione, 170
Circuiti di raffreddamento, 50
Codice di ordinazione, 34
Collegamento potenza, 143
Commutazione errata, 106
Compatibilità ambientale, 173
Concetti di frenatura, 110
Coppie di serraggio, 83
Curve caratteristiche dei motori 1FW6090-xxx05xxxx, 183
Curve caratteristiche dei motori 1FW6090-xxx07xxxx, 185
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Curve caratteristiche dei motori 1FW6090-xxx10xxxx, 187
Curve caratteristiche dei motori 1FW6090-xxx15xxxx, 189
Curve caratteristiche dei motori 1FW6130-xxx05xxxx, 191
Curve caratteristiche dei motori 1FW6130-xxx07xxxx, 193
Curve caratteristiche dei motori 1FW6130-xxx10xxxx, 195
Curve caratteristiche dei motori 1FW6130-xxx15xxxx, 197
Curve caratteristiche dei motori 1FW6150-xxx05xxxx, 199
Curve caratteristiche dei motori 1FW6150-xxx07xxxx, 201
Curve caratteristiche dei motori 1FW6150-xxx10xxxx, 203
Curve caratteristiche dei motori 1FW6150-xxx15xxxx, 205
Curve caratteristiche dei motori 1FW6160-xxx05xxxx, 208
Curve caratteristiche dei motori 1FW6160-xxx07xxxx, 212
Curve caratteristiche dei motori 1FW6160-xxx10xxxx, 216
Curve caratteristiche dei motori 1FW6160-xxx15xxxx, 221
Curve caratteristiche dei motori 1FW6160-xxx20xxxx, 226
Curve caratteristiche dei motori 1FW6190-xxx05xxxx, 229
Curve caratteristiche dei motori 1FW6190-xxx07xxxx, 233
Curve caratteristiche dei motori 1FW6190-xxx10xxxx, 237
Curve caratteristiche dei motori 1FW6190-xxx15xxxx, 242
Curve caratteristiche dei motori 1FW6190-xxx20xxxx, 247
Curve caratteristiche dei motori 1FW6230-xxx05xxxx, 250
Curve caratteristiche dei motori 1FW6230-xxx07xxxx, 254
Curve caratteristiche dei motori 1FW6230-xxx10xxxx, 258
Curve caratteristiche dei motori 1FW6230-xxx15xxxx, 262
299
Indice analitico
Curve caratteristiche dei motori 1FW6230-xxx20xxxx, 267
Curve caratteristiche dei motori 1FW6290-xxx07xxxx, 270
Curve caratteristiche dei motori 1FW6290-xxx11xxxx, 273
Curve caratteristiche dei motori 1FW6290-xxx15xxxx, 276
Curve caratteristiche dei motori 1FW6290-xxx20xxxx, 278
Cuscinetto, 109
D
Dati tecnici
1FW609, 182
1FW613, 190
1FW615, 198
1FW616, 206
1FW619, 227
1FW623, 248
1FW629, 268
Dichiarazione di conformità CE, 7
Disegno quotato 1FW6090-xxB (generale), 282
Disegno quotato 1FW6130-xxB (generale), 283
Disegno quotato 1FW6150-xxB (generale), 284
Disegno quotato 1FW6160-xxB (generale), 286
Disegno quotato 1FW6190-xxB (generale), 287
Disegno quotato 1FW6230-xxB (generale), 288
Disegno quotato 1FW6290-xxB (generale), 289
Dispositivi di raffreddamento, 51
Disposizione bifronte, 59
Documentazione
Conservazione, 15
E
Elementi PTC, 45
F
Forma costruttiva, 26
forma di servizio
Funzionamento intermittente, 77
servizio di breve durata, 76
Forze assiali, 82
Forze radiali, 81
Frenatura, 109
Funzionamento in parallelo, 55
Funzionamento intermittente, 77
300
G
Grado di protezione, 26, 100
H
Hotline, 6
I
imballaggio, 174
Imballaggio, 172
Infortuni
Pronto intervento, 19
Integrazione nel sistema, 102, 104
Isolamento dell'avvolgimento, 26
K
KTY 84, 46
L
liquido refrigerante
fornitura, 52
proprietà dell'acqua, 53
proprietà dell'anticorrosivo, 53
proprietà generali, 53
M
Magazzinaggio, 172
messa a terra, 145
Montaggio del motore, 79
Bulloneria, 83
Coppie di serraggio, 83
Disposizione delle tubazioni, 91
Grado di protezione, 100
Misure precauzionali, 79
Tecnica di fissaggio, 83
Motore
Smaltimento, 173
O
Ondulazione di coppia, 26
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
Indice analitico
P
Prodotti di terze parti, 291
prova ad alta tensione, 169
PTC, resistenza termica, 45
R
Raffreddamento, 26, 48
Requisiti di sistema, 104
Rischi residui, 13
S
schermatura, 145
Service & Support, 6
servizio di breve durata, 76
Simboli della formula, 176
Sistema di azionamento, 104
Sistema encoder, 106
Smaltimento, 173
Sorveglianza della temperatura, 26
Supporto tecnico, 6
T
Tecnica di collegamento del radiatore, 147
Tecnica di fissaggio, 83
Temperatura in ingresso del liquido di
raffreddamento, 51
Temperatura mandata, 51
Temp–F
Valutazione, 48
Temp–S
Valutazione, 48
Tipo di motore, 26
Tipo di raffreddamento, 26
Trasporto, 172
Tubi flessibili del sistema di raffreddamento, 158
V
Valutazione
Temp-F, Temp-S, 48
Motori Torque integrati 1FW6
Manuale di progettazione, 05/2009, 6SN1197-0AE00-0CP3
301
Siemens AG
Industry Sector
Drive Technologies
Motion Control Systems
Postfach 3180
91050 ERLANGEN
GERMANY
Con riserva di modifiche
© Siemens AG 2009
www.siemens.com/motioncontrol