Azionamenti elettrici
caratteristiche dei motori
tipologie di azionamento
comportamento generale di un azionamento
Prof. Carlo Rossi
DEIS - Università di Bologna
Tel: 051-2093020
E-mail: [email protected]
Tipologie di azionamento elettrico
• Con motore a collettore
• ad eccitazione separata
• a magneti permanenti
• Con motore sincrono a magneti permanenti
• Brushless a campo trapezoidale
• Brushless a campo sinusoidale
• Con motore asincrono ad induzione
• con controllo tensione/frequenza (Inverter)
• con controllo vettoriale
• con controllo vettoriale sensorless
• Con motore passo-passo
• per semplici ed economici posizionatori di piccola taglia
• non per camme o assi elettrici
disponibili
con motori rotativi
con motori lineari
Parte 1 2
N
ia
ia
Motore a collettore
Caratteristiche generali
• circuiti elettrici sul rotore
• meccanismo collettore/spazzole
• aumento di resistenza
rotorica
ϕe
• perdite
• calore
• limiti alla velocità max
• scintillamento
S
sezione trasversale
La coppia è proporzionale
al prodotto della corrente di
armatura e del flusso (corrente)
di eccitazione
• problemi con EMC
• realizzazione stagna per
ambienti infiammabili
• calore dissipato sul rotore
• ventilazione interna
• inerzia rotorica
• realizzazioni ironless
• dimensionamento termico
• piccole taglie
Parte 1 3
N
ia
ia
ϕe
Motore a collettore
Caratteristiche generali
• circuito di eccitazione
• separato
• richiede l’alimentazione
• peggiora il rendimento
• caratteristiche non lineari
• può ruotare oltre la velocità
max
• deflussaggio
S
sezione trasversale
La coppia è proporzionale
alla corrente di armatura
• utile per applicazioni speciali
• a magneti permanenti
• miglior rendimento
• caratteristiche lineari
• ottime prestazioni dinamiche
• ha fatto la storia
dell’Automazione
non usare per nuovi progetti
Parte 1 4
Motore sincrono a Magneti Permanenti (Brushless)
Caratteristiche generali
F1
F2
N
• circuiti elettrici solo sullo statore
• non servono spazzole e collettore
• non si dissipa calore sul rotore
• il calore è generato all’esterno e può
essere smaltito dalla carcassa
• disponibile non ventilato
• non necessita di eccitazione
• rendimento elevato
S
F2
F1
sezione trasversale
•
•
•
•
•
elevato rapporto coppia/peso
bassa inerzia con magneti speciali
elevata affidabilità
elevata capacità di sovraccarico
limiti sulla temperatura interna
• smagnetizzazione
• limitata extravelocità (MP)
Parte 1 5
Motore sincrono a Magneti Permanenti (Brushless)
F1
N
F2
Caratteristiche generali
• Brushless a campo trapezio
• primi tipi di Brushless
• non richiede sensore di posizione
assoluto
• sensori di posizione Hall
• problemi
S
F2
F1
sezione trasversale
La coppia è proporzionale
alla corrente (continua)
di fase
• coppia non costante nel giro
• ripple di coppia
• coppia decrescente con velocità
• rendimento più basso
• per applicazioni
• di bassa coppia
• con precisioni di movimento non
elevatissime
• non troppo spinte
dinamicamente
• dove il costo sia una variabile
importante
Parte 1 6
Motore sincrono a Magneti Permanenti (Brushless)
Caratteristiche generali
F1
N
• Brushless a campo sinusoidale
F2
• richiede sensore di posizione
assoluto
• resolver
• encoder sin/cos
• coppia costante nel giro
• massimo rendimento
• problemi
S
F2
F1
sezione trasversale
La coppia è proporzionale
alla risultante delle correnti
(sinusoidali) delle 3 fasi
• costo abbastanza elevato
• in calo con nuovi magneti
• ripple di coppia a bassa velocità
• cogging
standard di mercato per
l’automazione di macchina
Parte 1 7
Motore asincrono a induzione
Caratteristiche generali
1’
3
2
• Pilotaggio sullo statore
• Basso costo
• Nessun problema alle alte
temperature
• Elevata capacita' di sovraccarico
• Possibilita' di funzionamento a
velocita' superiori a quella nominale
con coppia ridotta
• deflussaggio
2’
3’
1
La coppia è proporzionale
allo scorrimento tra frequenza
meccanica ed elettrica
(motore asincrono)
• Problemi
• calore generato anche sul rotore
• ventilazione
• la potenza fornita genera coppia e
campo
• rendimento più basso
• inerzia relativamente elevata per la
presenza di ferro sul rotore
• controllo difficile a causa delle non
linearità
Parte 1 8
Motore passo-passo
Motore a 4 fasi del tipo 6-8
3
2
4
b
c
a
1
a’
c’
4’
1’
b’
2’
3’
fase 1-1’ alimentata
Parte 1 9
Motore passo-passo
Motore a 4 fasi del tipo 6-8
3
2
4
c
b
a’
1
1’
a
c’
4’
b’
2’
3’
fase 2-2’ alimentata
Parte 1 10
Motore passo-passo
Motore a 4 fasi del tipo 6-8
3
2
4
c
b
1
a’
a
1’
b’
c’
4’
2’
3’
fase 3-3’ alimentata
Parte 1 11
Motore a 4 fasi del tipo 6-8
3
2
Motore passo-passo
Caratteristiche generali
• motore a riluttanza
variabile
4
c
a’
b
1
1’
b’
a
4’
c’
2’
3’
fase 4-4’ alimentata
La coppia dipende dal quadrato della
corrente di fase e dalla posizione
• comportamento non lineare
• difficile controllarlo in
retroazione
• velocità di rotazione limitata
• utilizzabile in presa diretta
• disponibile per piccole
coppie
• la posizione raggiunta
dipende dalla sequenza di
attivazione delle fasi
• per semplici ed economici
posizionatori di piccola taglia
• non per applicazioni ad
elevata dinamica
Parte 1 12
Motori lineari
Disponibili sia in versione sincrona che asincrona
• realizzazioni sincrone più comuni
Senza ferro (ironless)
Con ferro (ironcore)
Coil assembly
Magnet assembly
La coppia è proporzionale
alla risultante delle correnti
(sinusoidali) delle 3 fasi
Motore sincrono
Parte 1 13
Motori lineari
Caratteristiche positive
• non hanno teoricamente limiti di corsa
• difficile realizzzarli lunghi
• ampia gamma di velocità
• da pochi µm/s a oltre 10m/s
• elevatissime accelerazioni
• elevato rapporto forza/massa (accelerazione)
• > 200 N/Kg (m/s2) (continuativa)
• > 500 N/Kg (m/s2) (di picco)
• elevata linearità del moto
• assenza di cogging nei motori ironless
• elevatissima precisione e ripetibilità
• collegamento in presa diretta
• niente isteresi, giochi, zona morta
• elevatissima rigidità
Parte 1 14
Motori lineari
Caratteristiche negative
• vengono forniti con le due parti (bobine e magneti)
separate
• occorre costruire la struttura meccanica
• parte molto critica
• problemi di rigidità della catena cinematica collegata
• attenzione alle risonanze
• nei motori con nucleo ferroso vi sono forze di attrazione
trasversali molto elevate
• attenzione alle guide
• generano campi magnetici
• occorre coprirli per prevenire depositi tra la parte mobile e quella
fissa
• polvere, polvere di ferro
• spazzole di pulizia, soffietti, montaggio capovolto,..
Parte 1 15
Motori lineari
Opzioni di movimento
• si può optare per tenere fissa una qualunque delle due
parti
Magneti mobili
pro
la parte alimentata ed eventuali
tubi di raffreddamento sono fissi
Bobine mobili
pro
minore peso ed ingombro della
parte mobile
contro
maggiore peso ed ingombro
della parte mobile
⇒ per spostamenti grandi
contro
i cavi si muovono
⇒ occorrono cavi speciali
⇒ occorre sostenere i cavi
Parte 1 16
Specifiche sul movimento
Variazione dell’uscita
Out
comando
Non interessano:
• tempo di assestamento
• errore a regime
uscita
t
Controllo in catena aperta
Esempi
• velocità base di macchina automatica
• rotazione di mulino
⇒ gestione dei transitori di avviamento ed arresto
• movimentazione di pompe
Parte 1 17
Specifiche sul movimento
Regolazione dell’uscita
Out
comando
Interessano:
• tempo di assestamento
• errore a regime
uscita
t
Controllo in retroazione
Esempi
• rotazione di mandrino
• nastri trasportatori in macchine automatiche
• semplici posizionatori
Parte 1 18
Specifiche sul movimento
Inseguimento dell’uscita
Out
comando
Varianti:
• asse singolo
• assi multipli coordinati
set point generati in modo coordinato
• assi multipli sincronizzati
uno dei movimenti è master di tutti gli altri
uscita
Interessano:
• la capacità di inseguire un
riferimento ad elevata dinamica
• l'errore di inseguimento
t
Controllo in retroazione con
azioni in avanti e uso di
generatore di traiettoria di moto
Esempi
• assi e camme elettrici
Parte 1 19
Azionmenti sincroni a campo trapezoidale
Problematiche
• costruito per funzionare con correnti continue commutate
elettronicamente tra le fasi ( posizione del rotore)
• la coppia è proporzionale alla corrente
• in posizioni predefinite del rotore occorre spegnere la fase attiva e
contemporaneamente accenderne un’altra
• a causa della induttanza (inerzia elettrica) nei circuiti
• la corrente impiega del tempo per scendere a zero e salire al
valore previsto
• due fasi generano contemporaneamente coppia
• la coppia non è più costante
• ⇒ ripple di coppia
• il valore medio della coppia a corrente costante cala al crescere
della velocità
• problemi alle alte velocità
Parte 1 20
Azionamenti sincroni a campo trapezoidale
Problematiche
• modello semplificato della variazione della corrente
di 1
≈ (E − e)
dt L
di
dt
è la pendenza della curva di salita/discesa della corrente
E è la tensione di alimentazione, considerata al massimo valore
(la tensione del bus continuo) per minimizzare la durata del transitorio
e è la forza controelettromotrice, proporzionale alla velocità
L è l’induttanza del circuito
a parità di v e di L la pendenza cala al crescere della velocità
Parte 1 21
Azionamenti sincroni a campo trapezoidale
di 1
≈ (E − e)
dt L
di +
E
≈+
dt
L
i
bassa
velocità
ω≈0
e≈0
t
i
media
velocità
ω ≈ ωmax/2
e ≈ E/2
t
i
alta
velocità
t
ω ≈ ωmax
e≈E
di −
E
≈−
dt
L
di +
E
≈+
2L
dt
di −
3E
≈−
dt
2L
di +
E
⟨⟨ +
dt
L
di −
2E
≈−
dt
L
Parte 1 22
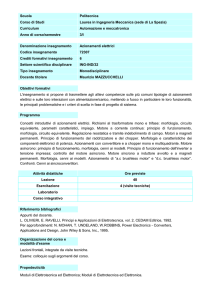
Azionamenti sincroni a campo trapezoidale
Effetti dinamici della correnti sulla coppia
A bassa velocità
Ad alta velocità
i
i
a
a
i
ϑ=120°
t
b
i ϑ=120°
b
t
t
c
c
t
t
Valor medio
t
Parte 1 23
Azionamenti asincroni con controllo V/F (Inverter)
Problematiche
• Caratteristica meccanica a tensione e frequenza costanti
• coppia in funzione dello scorrimento
• differenza percentuale tra
• frequenza elettrica (alimentazione) e frequenza meccanica
(movimento)
Cmax
C
Cavv
Cnom
A basso scorrimento
Generatore
Cm = k*s
0
1
s
Motore
Parte 1 24
Azionamenti asincroni con controllo V/F (Inverter)
Curve caratteristiche
• Caratteristica meccanica a tensione e frequenza costanti
Cmax
Cavv
C
Cnom
motore standard
per avviamenti a carico
0
1
s
Motore
Parte 1 25
Azionamenti asincroni con controllo V/F (Inverter)
Curve caratteristiche
• Caratteristica meccanica a tensione e frequenza costanti
Cmax
C
Cnom
Cavv
0
1
s
motore adatto
per funzionamento
a frequenza variabile
Motore
Parte 1 26
Azionamenti asincroni con controllo V/F (Inverter)
Curve caratteristiche
• Caratteristica meccanica ideale a tensione e frequenza
variabili (V/f = costante)
C
0
V ed f crescono
si sono trascurate
le cadute sulle
resistenze statoriche
ω
Parte 1 27
Modello statico
Curve caratteristiche
• Caratteristica meccanica reale a tensione e frequenza
variabili (V/f = costante)
C
0
V ed f crescono
si sono considerate
le cadute sulle
resistenze statoriche
ω
Parte 1 28
Azionamenti asincroni con controllo V/F (Inverter)
Controlli basati sulle caratteristiche statiche
Controllo di velocità del tipo V/f = K costante
V
Vnom
tarature per
compensare le
cadute resistive
a bassa velocità
off-set
Vo
nonlineare
lineare
fnom
f
Parte 1 29
Azionamenti asincroni con controllo V/F (Inverter)
Controllo del tipo V/f costante
• In terminologia tecnica questo tipo di azionamento è
chiamato INVERTER
• controllo di velocita' in catena aperta
• velocita' dipendente dal carico
• si può aggiungere un controllo di velocità
• prestazioni dinamiche modeste
• problemi alle basse velocità ed in presenza di coppie di carico
variabili
• costo minimo per Kw
Parte 1 30
Azionamenti con motori passo-passo
Controlli di posizione sensorless
• nelle applicazioni di controllo di posizione dove
interessano solo la posizione iniziale e finale del
movimento
• tipo pick-and-place
• soluzioni semplice e poco costosa
• controllo semplificato in cui non serve un sensore di posizione
• il motore ha un comportamento sincrono con la sequenza di
pilotaggio
• basta contare gli impulsi di comando
• coppia intermittente filtrata di solito dall’inerzia del carico
• soluzione di posizionamento per piccoli sistemi
• dove il costo dell’azionamento è una componente importante del
costo totale
• è un motore coppia che può essere collegato senza
riduttore in presa diretta sul carico
Parte 1 31
Altre tipologie di azionamento
Azionamenti assi
• azionamenti con motori
• a collettore, sincrono sinusoidale, asincrono a controllo vettoriale
• sono tutti azionamenti con sistemi di controllo in retroazione
anche molto complessi
• comportamento esterno
• simile agli azionamenti con motore a collettore
• taratura standard degli anelli di velocità
• ipotesi di inertia matching
• inerzia del carico riportata al motore uguale a quella del motore
• se l’inertia matching non viene rispettato occorre tarare l’enello di
velocità
• per elevate prestazioni dinamiche
• resolver di buona qualità o encoder con molti impulsi/giro
• attualmente negli azionamenti per macchine automatiche
• encoder sin/cos
Parte 1 32
Controllo del moto
Considerazioni conclusive
• la definizione di un problema di controllo del moto
richiede la specifica delle esigenze di
•
•
•
•
•
•
precisione a regime
capacità di minimizzare gli effetti dei disturbi di carico
qualità del transitorio
qualità dell’inseguimento
coordinamento con altri assi
costi
Per ogni problema occorre scegliere il sistema di
azionamento più idoneo
Parte 1 33
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore a collettore a MP
• Regolazione
• ottima
• Inseguimento
• ottimo
• Risposta dinamica
• eccellente
• Extra coppia
• 6 ÷ 8 con motori speciali
• Extra velocità
• No
• Taglie
• fino a qualche MW
• Diffusione
• ampia, in calo. No per nuovo
• Costo
• contenuto a bassa potenza
Parte 1 34
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore sincrono Trapezoidale
• Regolazione
• ottima, buona ad alta velocità
• Inseguimento
• buono
• Risposta dinamica
• buona
• Extra coppia
• 2÷4
• Extra velocità
• No
• Taglie
• < 10Nm
• Diffusione
• ampia, in calo
• Costo
• contenuto
Parte 1 35
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore sincrono Sinusoidale
• Regolazione
• ottima, cogging a bassissima veloc.
• Inseguimento
• eccellente
• Risposta dinamica
• massima
• Extra coppia
• 4÷6
• Extra velocità
• No
• Taglie
• < 50Nm
• Diffusione
• ampia, standard industriale
• Costo
• elevato, in calo
Parte 1 36
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore asincrono con Inverter
• Regolazione
• scadente, catena aperta
• Inseguimento
• scadente
• Risposta dinamica
• discreta, dipende dal carico
• Extra coppia
• 2÷4
• Extra velocità
• Si
• Taglie
• 0.5 kW ÷ 1MW
• Diffusione
• amplissima, standard industriale
• Costo
• minimo per kW
Parte 1 37
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore asincrono con Controllo Vettoriale
• Regolazione
• eccellente
• Inseguimento
• eccellente
• Risposta dinamica
• eccellente, legg. infer. a sincrono
• Extra coppia
• 4÷6
• Extra velocità
• Si
• Taglie
• < 500 kW
• Diffusione
• modesta, in grande crescita
• Costo
• elevato, in calo. ⇒ +15% Inverter
Parte 1 38
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore Passo-Passo
• Regolazione
• buona
• Inseguimento
• buono
• Risposta dinamica
• discreta
• Extra coppia
• No
• Extra velocità
• No, problemi alta velocità
• Taglie
• < 10Nm
• Diffusione
• ampia per piccole potenze
• Costo
• contenuto
Parte 1 39
Tabelle riassuntive delle caratteristiche degli azionamenti
Azionamenti per motore lineare sincrono
• Regolazione
• ottima
• Inseguimento
• eccellente
• Risposta dinamica
• massima
• Extra coppia
• 4÷6
• Extra velocità
• No
• Taglie
• < 10 kN
• Diffusione
• limitata, disponibilità recente
• Costo
• elevato, in calo
Parte 1 40
Schema concettuale di azionamento
controllo di un singolo asse
traiettoria
progettata
generatore
di traiettorie
Tp
unità di
controllo
traiettoria
risultante
al motore
convertitore
+ motore
Tm
traiettoria
risultante
al mezzo
operativo
specifico
catena
cinematica
Tmos
azionamento
Le tre traiettorie (Tp, Tm, Tmos) non sono uguali
Parte 1 41
Non idealità di comportamento
Nell'azionamento in senso stretto
situazione ideale
≡
Tp
azionamento
Tm
• Anche l'azionamento è un sistema dinamico (per quanto veloce) e non
può trasferire all'uscita senza errore qualunque segnale gli venga
applicato all'ingresso
• al crescere della frequenza della traiettoria di comando (Tp), il suo
trasferimento all'uscita diventa sempre più problematico
• la traiettoria generata in uscita (Tm) viene deformata in ampiezza e
riprodotta in ritardo
• l'analisi armonica è uno strumento utile per comprendere il problema
Parte 1 42
Non idealità di comportamento di un azionamento
Risposta armonica
dB
0
Attenuazione dell'uscita Tm
Attenuazione
di 10 volte
-10
-20
-30
-40
L'effetto di sfasamento
si manifesta già a
frequenze più basse
-50
Banda passante-60
° 0
Sfasamento dell'uscita Tm
Frequenza (rad/sec)
-50
-100
-150
-200
Frequenza (rad/sec)
Parte 1 43
Non idealità di comportamento di un azionamento
Inseguimento di segnale sinusoidale - oscillatore
1
1
0
-1
Traiettoria
al motore
0
0
200
400
600
800
1000
-1
1
1
0
0
-1
Traiettoria
progettata
-1
0
2
4
6
0
8 10 12 14 16 18 20 -1 0
20
1
2
40
3
4
60
5
6
7
80
100
8
9 10
All'aumentare
della frequenza
è evidente il
degrado sia in
termini di
ampiezza che
di ritardo
Parte 1 44
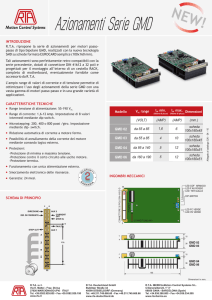
Non idealità di comportamento di un azionamento
Inseguimento di segnale composto - oscillatore
1
Traiettoria
progettata
1
Traiettoria
al motore
0
0
25 battute
-1
0°
180°
50 battute
360°
-1
0°
1
1
0
0
100 battute
-1
0°
180°
180°
360°
All'aumentare
del numero di
battute è
evidente il
degrado.
Il tempo di sosta
effettivo si
riduce
sempre di più
200 battute
360°
-1
0°
180°
360°
Parte 1 45
Schema di controllo in cascata
Adottato nella maggior parte dei sistemi assi
commerciali
Spesso collocati su diverso
dispositivo detto scheda assi
Generatore
di traiettorie
ϑref
αref
Indispensabili per
limitare il ritardo
Jt/kc
ωref
1
Iref
K
+
PI
+
Dipendono dalla catena cinematica
PI
A+M
Dipende dal motore
Parte 1 46
Prestazioni di inseguimento
Senza azioni in avanti
posizione
1
0.8
traiettoria
0.6
vera
0.4
0.2
0
0
40
80
120
ms
160
200
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
00
Errore di posizione
emax 14%
40
80
120
ms
160
200
16
14
12
10
8
6
4
2
0
-2
0
velocità
traiettoria
vera
40
Effetto della mancata taratura del regolatore di velocità
Regolatore di velocità tarato (in fabbrica) per ρ = 1, ma ρ = 10
posizione
1
0.8
traiettoria
0.6
0.4
vera
0.2
0
0
40
80
120
ms
160
200
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
00
Errore di posizione
emax 17%
40
80
120
ms
160
200
18
16
14
12
10
8
6
4
2
0
-2 0
80
120
ms
160
200
ρ = Jl n2 Jm
velocità
traiettoria
vera
40
80
120
ms
160
200
Parte 1 47
Prestazioni di inseguimento
Con le azioni in avanti
posizione
1
posizione
1
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0
0
40
-3
80
120
ms
160
200
errore di posizione
14 x 10
12
10
8
6
4
2
0
-2
-4
-6
0
40
emax 1.4%
80
120
ms
160
solo di velocità
200
0
0
40
80
120
ms
posizione
1
160
200
-3 errore di posizione
6 x 10
5
4
emax 0.5%
3
2
1
0
-1
-2
0
40
80 120 160 200
ms
velocità + corrente
0
0
40
80
-2 errore
6 x 10
120
ms
160
200
di posizione
4
emax 5%
2
0
-2
-4
0
40
80
120
ms
160
200
senza taratura regolatore
Parte 1 48
Prestazioni di inseguimento
Implementazione digitale
• tutti gli azionamenti sono controllati in modo digitale con
microprocessore o DSP
• nascono altre non idealità legate al tempo di esecuzione
(campionamento) del controllo che dipende
•
•
•
•
dalla architettura dell'Unità di Governo complessiva
dalla potenza dei processori utilizzati
dal numero di assi che un singolo processore controlla
dalla quantità di altre funzioni utente da eseguire
• una architettura di controllo con scheda assi separata che
controlla più azionamenti può risultare critica dal punto di
vista del tempo di campionamento
• le azioni in avanti sono efficaci se generate allo stesso
tempo di campionamento del loop relativo
Parte 1 49
Collegamento con la struttura meccanica
Elasticità nella catena cinematica
• la catena cinematica non è infinitamente rigida
• consideriamo solo l'elasticità del riduttore
• primo modo di risonanza
• tra motore e catena cinematica c'è una molla
• modello massa/molla/massa
M
M
ϑm
ϑc
Jm
Jc
Nel modello va considerato
anche un piccolo smorzamento
corrispondente alle perdite
di deformazione
Parte 1 50
Collegamento con la struttura meccanica
Elasticità nella catena cinematica
• caratteristiche in frequenza dei modi oscillatori
Analisi armonica
50
δr =
risonanza
-50
Del
δ ar =
ρ 2 Kel Jm
1 + ρ Kel
ρ
Jm
1 Kel
ω ar =
ρ Jm
-100
101
102
Kel = rigidità del riduttore
Del
ρ 2 Kel Jm
1
0
ωr =
1+ ρ
Jc
antirisonanza
103
104
Del = Dissipazione nel riduttore
ρ= 2
n Jm
Jm = inerzia motore
Jc = inerzia cinematismo
n = rapporto di riduzione
δx = smorzamento
Parte 1 51
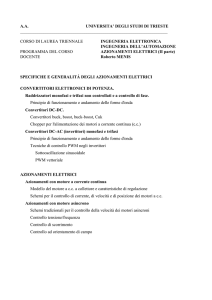
Collegamento con la struttura meccanica
Elasticità nella catena cinematica
• dipendenza dal bilanciamento delle inerzie
Analisi armonica
50
I modi hanno
frequenza e
smorzamento che
dipendono in
modo inverso dal
rapporto delle
inerzie
0
ρ=1
-50
ρ=1
ρ=7
-100
101
102
103
104
Jc
ρ= 2
n Jm
bilanciamento
delle inerzie
gli azionamenti non devono generare coppia alle frequenze dei modi di risonanza
Parte 1 52
Azionamenti elettrici
caratteristiche dei motori
tipologie di azionamento
comportamento generale di un azionamento
Fine
Prof. Carlo Rossi
DEIS - Università di Bologna
Tel: 051-2093020
E-mail: [email protected]