Università degli Studi di Salerno
DIPARTIMENTO DI FISICA “E.R.CAIANIELLO”
Corso di Laurea Triennale in Fisica
Stelle pulsanti di tipo Delta Scuti
Relatore:
Candidato:
Ch.mo Prof. Valerio Bozza
Francesco Villano
Correlatore:
Matricola 0512600007
Ch.mo Prof. Roberto Scarpa
Anno Accademico 2015-2016
Introduzione
Le stelle variabili sono oggetti per i quali è possibile osservare una dipendenza temporale della luminosità1 su una scala più piccola dei cambiamenti
evolutivi. In particolare, le variabili intrinseche devono questa variazione a processi fisici interni alla stella stessa, come nel caso delle variabili
pulsanti, per le quali la variazione in luminosità è dovuta a cambiamenti
di forma e/o dimensioni.
La prima variabilità di una stella fu scoperta nel 1596 da D. Fabricius
che osservò la scomparsa dal cielo notturno della stella o Ceti; circa 40 anni
dopo si realizzò come essa seguisse dei cicli di apparizione/scomparsa con
periodi di 11 mesi.
Nel 1784 J. Goodricke scoprı̀ la variabilità di δ Cephei e stelle simili
(Cefeidi ) e nel 1914 H. Shapley fu in grado di dimostrare che le variazioni
in luminosità erano dovute a pulsazioni radiali della stella.
In seguito H. Leavitt mostrò l’esistenza di una relazione tra periodo
e luminosità per le Cefeidi contenute nella Piccola Nube di Magellano,
definendo un metodo fondamentale per la determinazione delle distanze
astronomiche.
Ai giorni d’oggi sono note circa 46000 stelle variabili all’interno della
nostra galassia, alle quali se ne aggiungono ∼ 10000 di altre galassie e
∼ 10000 sospette.[1]
Sono raggruppate in classi in base a proprietà come periodo, tipo delle
oscillazioni e stadio evolutivo, cosa che comporta una certa separazione sul
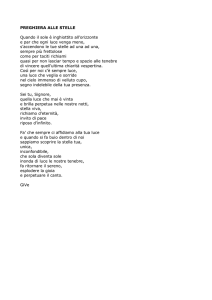
diagramma di Hertzsprung-Russell (HR) (figura i.1).
La prima parte di questa trattazione è dedicata ad una descrizione teorica dell’argomento. In particolare: nel primo capitolo verranno determinati
i possibili modi di oscillazione di una stella generica nell’approssimazione di
moto adiabatico; nel secondo capitolo si esporranno invece le condizioni che
determinano le pulsazioni di una stella introducendo fenomeni non adiabatici. Infine, l’ultimo capitolo della prima parte è dedicato al caso specifico
delle Delta Scuti.
Nella seconda parte sarà innanzitutto descritta l’osservazione di una
stella di questo tipo (capitolo 5), per poi concludere con l’analisi dei dati
sperimentali e il confronto con quanto riportato in letteratura (capitolo 6).
1
La luminosità è definita come l’energia elettromagnetica emessa da una stella per
unità di tempo.
iii
Figura i.1: Diagramma HR teorico con la posizione delle stelle variabili note 40
anni fa (a sinistra) e ai giorni d’oggi (a destra). Sull’asse delle ascisse è riportato
il logaritmo della temperatura efficace della stelle, ovvero la temperatura di un
corpo nero che ha la stessa luminosità per unità di area della stella considerata.
L’asse delle ordinate rappresenta i logaritmi dei rapporti L/L⊙ , dove L è la
luminosità della stella e L⊙ la luminosità del sole.[2]
iv
Indice
I
Fondamenti di teoria
1
1 Oscillazioni lineari e adiabatiche
1.1 Equazioni del moto . . . . . . . . .
1.1.1 Approssimazione adiabatica
1.1.2 Analisi perturbativa . . . .
1.2 Onde acustiche . . . . . . . . . . .
1.3 Onde di gravità . . . . . . . . . . .
1.4 Separazione delle variabili . . . . .
1.5 Proprietà generali . . . . . . . . . .
1.5.1 Modi p . . . . . . . . . . . .
1.5.2 Modi g . . . . . . . . . . . .
2 Fenomeni non adiabatici
2.1 Opacità . . . . . . . . . . . . .
2.2 Perturbazione delle frequenze .
2.3 Stabilità dei modi di oscillazione
2.3.1 Meccanismo ε . . . . . .
2.3.2 Meccanismi k e γ . . . .
.
.
.
.
.
3 Delta Scuti
3.1 Nozioni generali . . . . . . . . . .
3.2 Double-Mode HADS . . . . . . .
3.3 Effetto Blazhko . . . . . . . . . .
3.4 Selezione dei modi di oscillazione
II
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Acquisizione e analisi di dati sperimentali
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
5
6
7
9
13
14
16
.
.
.
.
.
17
17
19
20
20
21
.
.
.
.
29
29
30
31
32
35
4 Acquisizione e calibrazione delle immagini
37
4.1 AU CrB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Osservazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3 Calibrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
v
Indice
5 Fotometria e analisi dei dati
41
5.1 Fotometria differenziale . . . . . . . . . . . . . . . . . . . . . 41
5.2 Spettro delle frequenze . . . . . . . . . . . . . . . . . . . . . 44
5.3 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
vi
Parte I
Fondamenti di teoria
1
Capitolo 1
Oscillazioni lineari e adiabatiche
In questo capitolo verranno dapprima richiamate alcune equazioni fondamentali che saranno utili nel resto della trattazione. Nell’ipotesi di moto
adiabatico sarà fatta un’analisi perturbativa e verranno ricavate le soluzioni
del problema in casi particolari per andare a effettuare una prima distinzione dei modi di oscillazione di una stella. Infine sarà trattato il caso generale
per evidenziare il comportamento delle soluzioni.
1.1
Equazioni del moto
Indicando con ρ e v rispettivamente la densità e la velocità, e con p e f la
pressione e la risultante delle forze di volume per unità di massa, la seconda
legge della dinamica per un volume infinitesimo di gas è
ρ
dv
= −∇p + ρf
dt
(1.1)
Nel resto della trattazione verrà considerata come unica forza di volume
quella gravitazionale1
f =g
(1.2)
dove g è l’accelerazione gravitazionale, legata al potenziale Φ da
g = −∇Φ
(1.3)
Un’approssimazione che semplifica notevolmente la discussione è quella di
ignorare la variazione del potenziale gravitazionale Φ durante le oscillazioni.
Tale approssimazione, detta di Cowling, permette comunque di ricavare
delle proprietà del tutto generali sui modi di oscillazione[3].
Un’altra equazione fondamentale è l’equazione di continuità2
∂ρ
+ ∇ · (ρv) = 0
∂t
1
2
Ignorando, ad esempio, gli effetti dovuti ad eventuali campi magnetici.
La (1.4) esprime semplicemente la conservazione della massa.
3
(1.4)
Capitolo 1: Oscillazioni lineari e adiabatiche
Si richiama inoltre la prima legge della termodinamica espressa nella forma
dq
dE
dV
=
+p
dt
dt
dt
(1.5)
dove dq è il calore scambiato per unità di massa, E è l’energia interna per
unità di massa e V = 1/ρ.
Indicando con T la temperatura, si definiscono gli esponenti adiabatici
∂ ln p
Γ1 ≡
∂ ln ρ ad
(1.6)
∂ ln T
Γ3 − 1 ≡
∂ ln ρ ad
che permettono di scrivere[4] due forme equivalenti della (1.5)
1
dp Γ1 p dρ
dq
=
−
dt
ρ(Γ3 − 1) dt
ρ dt
dq
T dρ
dT
= cV
− (Γ3 − 1)
dt
dt
ρ dt
(1.7)
(1.8)
dove cV è il calore specifico per unità di massa a volume costante.
1.1.1
Approssimazione adiabatica
In questa prima parte il moto viene assunto come adiabatico; questa approssimazione funziona bene per le zone interne di una stella all’interno
delle quali gli scambi di calore avvengono su scale temporali più grandi3 dei
periodi di pulsazione[5].
Richiedendo quindi dq/dt = 0 nella (1.7) si ottiene una relazione che
lega p e ρ
Γ1 p dρ
dp
=
(1.9)
dt
ρ dt
3
O equivalentemente se il calore scambiato in una regione è molto più piccolo
dell’energia della regione stessa.
4
Capitolo 1: Oscillazioni lineari e adiabatiche
1.1.2
Analisi perturbativa
Si considerano ora piccole deviazioni dalla posizione di equilibrio che viene
supposta statica.4
Una generica grandezza a(r, t) può in tal caso essere espressa in termini della perturbazione a′ (r, t) dalla posizione di equilibrio a0 (r) in una
descrizione di tipo Euleriano
a(r, t) = a0 (r) + a′ (r, t)
(1.10)
In alcuni casi sarà invece più opportuno usare il formalismo Lagrangiano:
se un elemento di gas si sposta dalla posizione r0 alla posizione r0 + δr, la
generica grandezza sarà perturbata di un δa(r) tale che
δa(r) = a(r0 + δr) − a0 (r0 ) = a(r0 ) + δr · ∇a0 (r) − a0 (r0 )
= a′ (r0 ) + δr · ∇a0 (r)
(1.11)
In questo modo le equazioni possono essere linearizzate.
La (1.1) diventa5
∂v
∂ 2 δr
ρ0
= ρ0 2 = −∇p′ + ρ′ g0
∂t
∂t
(1.12)
In termini di perturbazioni Lagrangiane l’equazione per l’energia (1.7) si
scrive come
1
∂δp Γ1,0 p0 ∂δρ
∂δq
(1.13)
=
−
∂t
ρ0 (Γ3,0 − 1) ∂t
ρ0 ∂t
dove Γ1,0 e Γ3,0 sono gli esponenti adiabatici calcolati nella posizione di
equilibrio.
Allo stesso modo la relazione adiabatica (1.9) diventa
∂δp Γ1,0 p0 ∂δρ
−
=0
∂t
ρ0 ∂t
(1.14)
o equivalentemente, in una descrizione Euleriana,
p′ + δr · ∇p0 =
Γ1,0 p0 ′
(ρ + δr · ∇ρ0 )
ρ0
(1.15)
Infine, l’equazione di continuità nelle nuove variabili diventa
∂ρ′
+ ∇ · (ρ0 v) = 0
∂t
4
(1.16)
Le derivate temporali delle grandezze all’equilibrio sono nulle.
Qui si sta utilizzando per la prima volta l’approssimazione di Cowling, omettendo
quindi il termine g′ . Si sta anche tenendo conto del fatto che le grandezze all’equilibrio
soddisfano la (1.1).
5
5
Capitolo 1: Oscillazioni lineari e adiabatiche
La (1.16) può essere integrata per ottenere le due forme equivalenti
1.2
ρ′ + ∇ · (ρ0 δr) = 0
(1.17)
δρ + ρ0 ∇ · (δr) = 0
(1.18)
Onde acustiche
Come primo caso si vogliono determinare, se esistono, soluzioni della (1.12)
nella condizione in cui l’effetto della forza gravitazionale è trascurabile rispetto alle forze di superficie. Si vogliono quindi determinare modi di oscillazione per i quali la forza di richiamo è la pressione. Questi modi sono
detti modi p.
Con questa richiesta l’equazione del moto (1.12) si scrive come
∂ 2 δr
= −∇p′
∂t2
e, calcolando la divergenza ad ambo i membri, si ha
ρ0
(1.19)
∂2
(∇ · δr) = −∇2 p′
(1.20)
∂t2
La divergenza di δr può essere eliminata tramite l’equazione di continuità
nella forma (1.18) e p′ può essere espressa in termini della densità ρ′ tramite
la relazione adiabatica (1.15), ottenendo
ρ0
Γ1,0 p0 2 ′
∂ 2 ρ′
=
∇ p = c20 ∇2 ρ′
2
∂t
ρ0
(1.21)
dove
Γ1,0 p0
(1.22)
ρ0
è il quadrato della velocità del suono adiabatica.
L’equazione (1.21) ha la forma di una equazione delle onde e ammette
come soluzioni le onde acustiche
c20 ≡
ρ′ = aei(k·r−ωt)
(1.23)
Sostituendo la (1.23) nella (1.21) si ottiene
− ω 2 ρ′ = c20 ∇ · (ikρ′ ) = −c20 |k|2 ρ′
(1.24)
Quindi la (1.23) è una soluzione se vale la cosiddetta relazione di dispersione
ω 2 = c20 |k|2
(1.25)
6
Capitolo 1: Oscillazioni lineari e adiabatiche
1.3
Onde di gravità
Si cercano ora altre soluzioni sempre della forma di onde piane, ma con
frequenze molto più piccole dei modi p.
Esprimendo lo spostamento δr e il vettore d’onda k nella componente
radiale e orizzontale
δr = ξr ar + ξh
k = kr a r + k h
(1.26)
e cercando ancora una volta soluzioni del tipo (1.23), la (1.12) è soddisfatta
se valgono le due equazioni
− ρ0 ω 2 ξr = −ikr p′ − ρ′ g0
(1.27)
− ρ′ ω 2 ξh = −ikh p′
(1.28)
ρ′ + ρ0 ikr ξr + ρ0 ikh · ξh = 0
(1.29)
Allo stesso modo l’equazione di continuità (1.17) richiede
Dalla (1.28) e dalla (1.29) si può esprimere la perturbazione della pressione
in termini delle altre variabili
p′ =
ω2 ′
(ρ + ikr ρ0 ξr )
kh2
(1.30)
che inserita nella (1.27) da
ρ0 ω
2
ρ′
k2
1 + r2 +
k h ρ0
ξ r = ρ′ g 0
Per basse frequenze ρ′ /ρ ≪ 1 e la (1.31) si può scrivere come
kr2
2
ρ 0 ω 1 + 2 ξ r = ρ′ g 0
kh
(1.31)
(1.32)
Dalla (1.32) si osserva come il moto sia guidato dalla forza gravitazionale per
unità di volume ρ′ g0 e per questo i modi di oscillazione corrispondenti sono
detti modi g, ovvero corrispondono ad onde di gravità. Il primo membro
della (1.32) è quindi l’accelerazione verticale moltiplicata per la densità ρ0
e per un termine adimensionale contenente i numeri d’onda. Quest’ultimo
è dovuto alla perturbazione della pressione: per muoversi verticalmente,
una parte di gas deve spostarsi orizzontalmente, e questo aumenta la sua
inerzia. L’effetto è maggiore quanto minore è il numero d’onda orizzontale
kh .
7
Capitolo 1: Oscillazioni lineari e adiabatiche
Esprimendo ora ρ′ tramite la relazione adiabatica (1.15) si ha
′
ρ =
′
c−2
0 p
+ ρ0 δr ·
1
1
∇p0 − ∇ρ0
p0 Γ1,0
ρ0
(1.33)
′
Il termine c−2
0 p può essere stimato dalla (1.30)
′
ω2
c−2
0 p
≃
ρ′
c20 kh2
(1.34)
La quantità c20 kh2 è, per la (1.25), la frequenza di un onda sonora con k = kh .
Poiché le frequenze dei modi g sono molto più piccole di quelle dei modi p,
′
′
il secondo membro della (1.34) è trascurabile e quindi c−2
0 p ≪ ρ.
Sostituendo, con questa approssimazione, la (1.33) nella (1.32) si ha
ω
2
k2
1 + r2
kh
ξr = N 2 ξr
(1.35)
dove
2
N = g0
1 d ln p0 d ln ρ0
−
Γ1,0 dr
dr
(1.36)
è il quadrato della frequenza di Brunt–Väisälä.
Dalla (1.35) si ricava anche in questo caso una relazione di dispersione:
ω2 =
N2
1 + kr2 /kh2
(1.37)
Per N 2 > 0 il moto è oscillatorio ed N rappresenta la frequenza delle oscillazioni nel limite di kh infinito, mentre lunghezze d’onda orizzontali diverse
da zero aumentano l’inerzia con conseguente diminuzione della frequenza.
Infine, la condizione N 2 > 0 equivale a richiedere
1
d ln ρ0
>
d ln p0
Γ1,0
(1.38)
nota anche come condizione di Ledoux6 .
É da notare che la presenza della (1.28) esclude la possibilità di avere
modi g puramente radiali, al contrario di quanto avviene per i modi p.
6
Se si verifica questa condizione il gas è anche detto convettivamente stabile.
8
Capitolo 1: Oscillazioni lineari e adiabatiche
1.4
Separazione delle variabili
Si considera ora il caso generale. Tramite la posizione (1.26), la (1.12) può
essere divisa nelle due equazioni
ρ0
∂ 2 ξh
= −∇h p′
∂t2
∂p′
∂ 2 ξr
=
−
− ρ′ g0
∂t2
∂r
dove ∇h è l’operatore definito come
ρ0
∇h ≡
1 ∂
1 ∂
θ̂ +
φ̂
r ∂θ
r sin θ ∂φ
(1.39)
(1.40)
(1.41)
Allo stesso modo l’equazione di continuità (1.4) si può scrivere come
ρ′ = −
1 ∂
(ρ0 r2 ξr ) − ρ0 ∇h · ξh
2
r ∂r
(1.42)
∂2
∇h · ξh = −∇2h p′
∂t
(1.43)
La divergenza della (1.39) è
ρ0
Il termine ∇h · ξh può essere eliminato grazie alla (1.42) per ottenere
1 ∂ 2
∂2
′
ρ + 2 (r ρ0 ξr ) = −∇2h p′
(1.44)
∂t2
r ∂r
Si introducono ora le armoniche sferiche Ylm (θ, φ), funzioni complesse
definite come
Ylm (θ, φ) = (−1)m clm Plm (cos θ)eimφ
(1.45)
dove Plm sono le equazioni di Legendre e clm costanti di normalizzazione.
Gli indici l ed m sono interi, con l ≥ 0 e |m| ≤ l e sono rispettivamente
chiamati numero quantico azimutale e numero quantico magnetico.
Un’importante proprietà delle armoniche sferiche è l’essere autofunzioni
dell’equazione
− r2 ∇2h Ylm (θ, φ) = l(l + 1)Ylm (θ, φ)
(1.46)
con autovalore l(l + 1).
Indicando ora con Ψ la generica grandezza (pressione, densità, ecc), si
cercano soluzioni della forma7
√
Ψ(r, θ, φ, t) = 4π Ψ̃(r)Ylm (θ, φ)e−iωnlm t
(1.47)
7
Tale procedimento è detto di separazione delle variabili.
9
Capitolo 1: Oscillazioni lineari e adiabatiche
ovvero che siano il prodotto di una funzione del solo raggio r e di un’armonica sferica8 . Le soluzioni con l = 0, e quindi m = 0, corrispondono a
modi radiali, mentre con l 6= 0 si parla di modi non radiali.
Nello specifico, il grado l rappresenta il numero di linee nodali9 sulla
superficie della stella di raggio R ed è legato alla lunghezza d’onda λh =
2π/kh dalla relazione
R
λh = 2π p
(1.48)
l(l + 1)
mentre l’ordine azimutale m indica il numero di nodi sull’equatore.
In figura 1.1 si possono osservare effetti di diverse combinazioni di l ed
m.
Figura 1.1: Rappresentazioni grafiche tramite curve di livello delle parti reali
di alcune armoniche sferiche: a) l = 1, m = 0; b) l = 1, m = 1; c) l = 2, m = 0;
d) l = 2, m = 1; e) l = 2, m = 2; f) l = 3, m = 0; g) l = 3, m = 1; h) l = 3, m
= 2; i) l = 3, m = 3; j) l = 5, m = 5; k) l = 10, m = 5; l) l = 10, m = 10.[5]
Un altro numero intero positivo necessario a caratterizzare un modo è
il numero di nodi n, ovvero di zeri, che ha la funzione Ψ̃(r).
Per oscillazioni radiali, se n = 0 si parla di modo fondamentale, se
n = 1 di primo ipertono10 e cosı̀ via (figura 1.2).
8
La soluzione è in generale complessa, ma avrà senso fisico soltanto la sua parte reale.
Una linea nodale è un insieme di punti che restano fermi durante le oscillazioni.
10
Se la frequenza di un ipertono è multiplo intero della frequenza fondamentale si parla
anche di armonica.
9
10
Capitolo 1: Oscillazioni lineari e adiabatiche
Infine la dipendenza temporale è espressa all’interno del fattore e−iωnlm t ,
dove ωnlm rappresenta la frequenza delle oscillazioni ed è a priori funzione
degli indici nlm.
La scelta dell’asse polare è però ininfluente se la stella non ruota e se
non è presente un campo magnetico, e questo comporta che le frequenze
sono degeneri rispetto ad m. In caso di stella ruotante con frequenza Ω
si possono definire due poli ed un equatore e le frequenze sono diverse per
diversi valori di m, con shift proporzionali a mΩ. In particolare, frequenze
con m > 0 rappresentano onde che viaggiano nel verso della rotazione,
mentre con m < 0 nel verso opposto.
Figura 1.2: Modo fondamentale (a), primo (b) e secondo (c) ipertono per una
generica stella di raggio R. Le linee tratteggiate rappresentano le linee nodali, le
frecce il moto del gas in un certo istante di tempo.[6]
Esprimendo le perturbazioni come la (1.47) e sostituendole nella (1.44),
nella (1.43) e nell’equazione per l’energia (1.7), tenendo conto della (1.46)
e dividendo infine per il fattor comune Ylm (θ, φ)e−iωnlm t , si ottengono le
seguenti
l(l + 1) ′
1 d 2 ˜
2
′
p̃
(1.49)
ω ρ̃ + 2 (r ρ0 ξr ) =
r dr
r2
− ω 2 ρ0 ξ˜r = −
dp̃′
− ρ̃′ g0
dr
(1.50)
Γ1,0 p0
δ ρ̃ = ρ0 (Γ3,0 − 1)δ q̃
(1.51)
ρ0
In seguito, per non appesantire la notazione, verrà omesso il pedice ”0”
per le grandezze nello stato di equilibrio e la tilde per la parte radiale delle
perturbazioni.
La (1.50) può essere vista come la componente radiale di un’equazione
agli autovalori
ω 2 δr = O(δr)
(1.52)
δ p̃ −
dove O(δr) è definito come l’operatore
1
ρ′
′
O(δr) = ∇ · p − g
ρ
ρ
11
(1.53)
Capitolo 1: Oscillazioni lineari e adiabatiche
La dipendenza da δr del secondo membro della (1.53) entra in gioco tramite
l’equazione di continuità per quanto riguarda ρ′ e di conseguenza tramite
l’equazione adiabatica per p′ .
Le frequenze permesse sono quindi gli autovalori dell’operatore O(δr).
Si può dimostrare[5] che questo operatore è Hermitiano e quindi ha
autovalori reali, ovvero ω 2 ∈ R, e ne consegue che ω è anch’esso reale o
immaginario puro.
Il moto è rispettivamente oscillatorio non smorzato o ha andamento
esponenziale.
La conclusione è che nell’approssimazione adiabatica le oscillazioni non
posso né crescere né decrescere nel tempo.
Questo approccio operatoriale si rivelerà utile nel momento in cui verranno considerati fenomeni non adiabatici, in quanto verranno trattati come
una perturbazione δO(δr) sull’operatore O(r).
Tornando alle equazioni per le oscillazioni, l’approssimazione adiabatica
annulla il secondo membro della (1.51) e, esprimendo il tutto in termini di
variazioni Euleriane, si ottiene un’espressione per ρ′
ρ ′
1 dp 1 dρ
′
ρ =
(1.54)
p + ρξr
−
Γ1 p
Γ1 p dr ρ dr
che sostituita nella (1.49) da
2
1 dp
1 ′
1 l(l + 1)
dξr
=−
+
− 2 p
ξr +
dr
r Γ1 p dr
ρ ω2 r2
c
(1.55)
Si introduce ora la frequenza di Lamb Sl definita come il tempo impiegato
da un’onda sonora a percorrere la lunghezza d’onda (1.48) su una superficie
di raggio r
l(l + 1)c2
(1.56)
Sl2 ≡
r2
Con questa definizione la (1.55) si può scrivere come
2
1
1 dp
2
dξr
Sl
ξr + 2
− 1 p′
(1.57)
=−
+
2
dr
r Γ1 p dr
ρc
ω
Sostituendo invece la (1.54) nella (1.50) si ottiene
dp′
1 dp ′
= ρ(ω 2 − N 2 )ξr +
p
dr
Γ1 p dr
(1.58)
dove N è la frequenza di Brunt–Väisälä definita in precedenza.
É da notare che i coefficienti della (1.57) e (1.58) sono tutti reali e quindi
lo sono anche le autofunzioni.
12
Capitolo 1: Oscillazioni lineari e adiabatiche
Queste equazioni costituiscono un set completo di equazioni differenziali
per le oscillazioni adiabatiche nell’approssimazione di Cowling e possono
essere usate per costruire dei modelli a partire da opportune condizioni al
contorno e dai parametri fisici ρ, p, Γ1 e g della posizione di equilibrio.
La scienza che si occupa di questo studio è detta Astrosismologia.
1.5
Proprietà generali
Per modi di alto ordine radiale le derivate spaziali delle grandezze all’equilibrio p e ρ sono molto più piccole[5] di quelle delle perturbazioni ξr , p′ e ρ′ .
La (1.57) e la (1.58) possono essere quindi approssimate come
2
Sl
1
dξr
− 1 p′
(1.59)
= 2
dr
ρc
ω2
dp′
= ρ(ω 2 − N 2 )ξr
dr
che possono essere unite nella forma
(1.60)
d2 ξr
= −K(r)ξr
dr2
con
ω2
K(r) = 2
c
N2
−1
ω2
(1.61)
Sl2
−1
ω2
(1.62)
La (1.61) rappresenta una forte approssimazione delle equazioni ricavate
nel paragrafo precedente ma permette di descrivere alcune proprietà che
valgono invece in generale.[5]
Il comportamento locale di ξr dipende dal segno di K: nelle zone in cui
K(r) > 0 la soluzione è oscillante, mentre dove K(r) < 0 ha andamento
esponenziale.
La soluzione è quindi oscillante se:
1. |ω| > |N | e |ω| > Sl
2. |ω| < |N | e |ω| < Sl
13
Capitolo 1: Oscillazioni lineari e adiabatiche
Per un dato modo di oscillazione ci saranno diverse zone in cui la
soluzione oscilla e altre in cui ha andamento esponenziale. In generale,
una di queste regioni è dominante e la soluzione decade esponenzialmente
allontanandosi da essa, in zone dette evanescenti.
La soluzione è detta intrappolata in questa regione. I confini di tale
zona sono i punti in cui K(r) = 0 e sono detti turning points.
Dalla (1.61) si osserva inoltre che l’autofunzione ξr oscilla più rapidamente quanto più grandi sono i valori di K(r) e quindi in generale il numero
di nodi n cresce con K.
Dalle condizioni 1 e 2 si ritrovano le due classi di modi definite in
precedenza:
• Modi con alte frequenze che soddisfano la 1 (modi p)
• Modi con basse frequenze che soddisfano la 2 (modi g).
La figura 1.3 mostra l’andamento delle frequenze di Lamb e di Brunt–Väisälä per
una stella con nucleo convettivo, quale potrebbe essere una Delta Scuti.
Tale rappresentazione è detta diagramma di propagazione.
La frequenza di Lamb decresce in maniera monotona verso la superficie,
mentre quella di Brunt–Väisälä ha un picco nei pressi del nucleo e in seguito
decresce rapidamente.
Si può osservare in particolare come il modo g (la frequenza più bassa) sia intrappolato in profondità ed è improbabile che sia osservato in
superficie, cosa che invece accade per il modo p (la frequenza più alta).
La frequenza intermedia ha un comportamento particolare: corrisponde
a un modo g in profondità e a un modo p nei pressi della superficie. Tali
modi sono detti misti.
1.5.1
Modi p
Come osservato in figura 1.3, i modi p sono intrappolati tra un turning
point rt e la superficie. La posizioni di rt è determinata dalla condizione
Sl (rt ) = ω, ovvero
c2 (rt )
ω2
=
(1.63)
rt2
l(l + 1)
La posizione dei turning points è quindi funzione di l, ovvero per l piccoli
si trova nei pressi del centro della stella.
In generale per i modi p si ha ω ≫ N e K(r) può essere approssimato
come
1
(1.64)
K(r) ≃ 2 (ω 2 − Sl2 )
c
14
Capitolo 1: Oscillazioni lineari e adiabatiche
Si nota come il valore di K cresca con la frequenza ω quindi, per quanto
detto sopra, l’ordine n cresce con la frequenza.
In questa approssimazione la dinamica dei modi p è completamente
determinata dalla variazione della velocità del suono nella stella e sono
quindi identificabili con le onde acustiche descritte in precedenza.
In figura 1.4 sono mostrate alcune di queste onde: propagandosi all’interno della stella, i fronti d’onda più in profondità incontrano zone in cui
la velocità del suono è più alta e quindi viaggiano più velocemente rispetto
ai fronti d’onda più vicini alla superficie.
Di conseguenza la direzione di propagazione è curvata rispetto la direzione radiale e l’onda ”rimbalza” tra la superficie, a causa della rapida
diminuzione della densità, e i turning points.
Figura 1.3: Diagramma di propagazione per una stella di 2M⊙ . La linea
tratteggiata rappresenta la frequenza di Lamb, quella intera la frequenza di
Brunt–Väisälä, in funzione della frazione del raggio stellare. La linea punteggiata in alto rappresenta un modo p8 (n = 8), quella in basso un modo g5 e
quella intermedia un modo misto. I cerchi sono i nodi interni alla stella.[2]
15
Capitolo 1: Oscillazioni lineari e adiabatiche
Figura 1.4: Onde sonore con frequenza di 3000 µHz e l = 0, 2, 20, 25, 75.[5]
1.5.2
Modi g
In questo caso i turning points sono determinati dalla condizione N (rt ) = ω
che porta alla formazione di due turning points (figura 1.3), di cui quello
inferiore si trova nei pressi del centro della stella mentre quello superiore è
funzione della frequenza.
Tipicamente ω 2 ≪ Sl2 e si può approssimare K come
K(r) ≃
1
l(l + 1)
(N 2 − ω 2 )
2
ω
r2
(1.65)
La dinamica è in questo caso determinata dalla frequenza N , il che rende i
modi g identificabili con le onde di gravità definite in precedenza.
Infine, dalla (1.65) si osserva come in questo caso K decresca per ω
crescente. Quindi l’ordine del modo aumenta per ω decrescente.
16
Capitolo 2
Fenomeni non adiabatici
Fino ad ora il moto è stato considerato adiabatico. Sono però dei fenomeni
non adiabatici che contribuiscono ad eccitare le oscillazioni ad ampiezze
apprezzabili.
Verrà dapprima introdotto il concetto di opacità, che si rivelerà in seguito fondamentale. Gli effetti della non adiabaticità verranno quindi introdotti come una perturbazione sull’operatore definito nel capitolo precedente.
Saranno infine determinate le condizioni necessarie all’instabilità di una
stella.
2.1
Opacità
Si consideri un fascio di radiazione di lunghezza d’onda λ che attraversa
un gas. Si definisce assorbimento qualsiasi processo che rimuove fotoni
dal fascio. Questo porta ad una variazione dell’intensità dIλ che sarà proporzionale alla densità ρ del gas, all’intensità originaria del raggio Iλ e alla
distanza ds considerata:
dIλ = −kλ ρIλ ds
(2.1)
Il coefficiente di proporzionalità kλ è detto opacità ed è ovviamente funzione della lunghezza d’onda considerata. Sono quattro le principali cause
dell’assorbimento:
1. Transizioni tra stati legati, nelle quali un elettrone di un atomo del
gas può assorbire un fotone di energia opportuna per effettuare una
transizione ad uno stato eccitato. In seguito può diseccitarsi effettuando una transizione verso lo stato di partenza e riemettendo un
fotone in una direzione casuale.
2. Fotoionizzazione, che riguarda la ionizzazione di un atomo da parte di
un fotone. Quest’ultimo può rimuovere un elettrone dall’orbitale nesimo se ha un’energia maggiore di quella di ionizzazione. Un esempio
importante è la fotoionizzazione dello ione H − , in cui l’elettrone aggiuntivo è debolmente legato al nucleo con un’energia di legame pari
a 0.754 V e può quindi essere rimosso da fotoni in un range continuo
17
Capitolo 2: Fenomeni non adiabatici
di lunghezze d’onda inferiori a 1640 nm. E’ anche possibile il processo inverso, in cui un elettrone si ricombina con uno ione ed emette
un fotone in una direzione casuale e con una frequenza che dipende
dall’energia cinetica dell’elettrone libero.
3. Assorbimento da parte di elettroni liberi, secondo il quale un elettrone
libero nei pressi di uno ione1 , per esempio H − , assorbe un fotone
ed acquisisce energia cinetica. Anche in questo caso è possibile il
fenomeno inverso, nel quale un elettrone rallenta in presenza di uno
ione ed emette un fotone.2
4. Scattering con elettroni, in cui il fotone non viene assorbito dall’elettrone libero ma si ha un processo di scattering. Per uno scattering di
tipo Thomson, ovvero con elettroni liberi, la sezione d’urto è molto
bassa, dell’ordine di 10−29 m2 , ed è quindi importante principalmente in gas molto densi, ovvero molto caldi. Se lo scattering avviene
con un elettrone debolmente legato ad un atomo si parla di scattering
Compton se la lunghezza d’onda del fotone è molto più piccola delle
dimensioni dell’atomo, oppure di scattering Rayleigh. Nella maggior
parte dei casi il processo predominante è lo scattering Thomson.
Si vuole ora introdurre una grandezza che tenga conto dell’opacità mediata
in tutte le lunghezze d’onda. Si definisce opacità media di Rosseland la
quantità
R ∞ 1 ∂Bν (T )
dν
1
= 0R ∞kν∂Bν∂T
(2.2)
(T )
k̄
dν
∂T
0
dove T è la temperatura, kν e Bν sono rispettivamente l’opacità e lo spettro
di corpo nero riferiti alla frequenza ν.
Si possono ricavare delle espressioni approssimate della (2.2) che sono
della forma
ρ
k̄ = k0 3.5
(2.3)
T
con k0 che dipende dalla composizione del gas. La (2.3) è anche detta legge
di Kramer per l’opacità.
1
2
La presenza dello ione è richiesta per la conservazione di energia e quantità di moto.
Processo di bremsstrahlung.
18
Capitolo 2: Fenomeni non adiabatici
2.2
Perturbazione delle frequenze
Introducendo effetti non adiabatici è ora necessaria una forma esplicita per
il calore scambiato per unità di massa nell’unità di tempo dq/dt.
Indicando con ε l’energia rilasciata per unità di massa e di tempo a
causa delle reazioni nucleari e con F il flusso di calore3 si può scrivere la
legge di conservazione
1
dq
=ε− ∇·F
(2.4)
dt
ρ
Indicando ora con δO(δr) la perturbazione introdotta dalla non adiabaticità, l’equazione agli autovalori (1.52) si scrive come
ω 2 δr = O(δr) + δO(δr)
dove
δO(δr) =
i
∇[(Γ3 − 1)(ρε − ∇ · F)′ ]
ωρ
(2.5)
(2.6)
La (2.6) si può ricavare con un po’ di calcoli a partire dall’equazione per
l’energia (1.13) con dq/dt dato dalla (2.4).
La perturbazione δω 2 sugli autovalori si può ora ottenere tramite la nota
relazione al primo ordine
< δr|δO(δr) >
< δr|δr >
R
i V δr∗ · ∇[(Γ3 − 1)(ρε − ∇ · F)′ ]dV
R
=
ω
ρ|δr|2 dV
V
δω 2 =
(2.7)
L’integrale al numeratore si può scrivere come
Z
Z
∗
′
∇·[δr (Γ3 −1)(ρε−∇·F) ]dV − ∇·(δr∗ )(Γ3 −1)(ρε−∇·F)′ dV (2.8)
V
V
Il primo integrale può essere trasformato in un integrale di superficie tramite
il teorema di Gauss e può essere trascurato, mentre nel secondo integrale
può essere usata l’equazione di continuità per quanto riguarda il termine
∇ · (δr∗ ).
In tal modo si ottiene
R δρ∗
′
i V ρ (Γ3 − 1)(ρε − ∇ · F) dV
R
(2.9)
δω =
2ω 2
ρ|δr|2 dV
V
3
I maggiori contributi al flusso di calore sono dovuti alla radiazione e alla convezione.
19
Capitolo 2: Fenomeni non adiabatici
2.3
Stabilità dei modi di oscillazione
Come dimostrato nel caso adiabatico, δρ è reale e quindi l’integrale nella
(2.9) è anch’esso reale e la perturbazione sulle frequenze è solo sulla parte
immaginaria.
La frequenza è ora una grandezza complessa ω = ωr + iη.
Come imposto nella separazione delle variabili, la dipendenza temporale
delle grandezze è dovuta al termine
e−iωt = e−i(ωr +iη)t = e−iωr t eηt
(2.10)
La stella è detta stabile rispetto ad un modo di oscillazione se η < 0,
ovvero se l’ampiezza decresce nel tempo fino ad annullarsi. Viceversa per
η > 0 l’ampiezza cresce nel tempo e può raggiungere valori osservabili: in
tal caso la stella è detta instabile rispetto al modo considerato.
Naturalmente l’ampiezza del modo non cresce indefinitamente ma ad un
certo punto entrano in gioco effetti non lineari[7] che pongono dei limiti.
I principali meccanismi che determinano l’instabilità di una stella verranno descritti nei prossimi paragrafi.
2.3.1
Meccanismo ε
Una prima proposta che vale la pena citare è il meccanismo ε, ideato da
Rosseland e Randers nel 1938. Esso si basa sulla variazione della velocità
con cui avvengono le reazioni nucleari all’interno della stella a seguito di
compressioni/espansioni.
In particolare, se una regione in cui avvengono queste reazioni viene
compressa, l’aumento di temperatura che ne risulta porta ad un incremento
dell’energia prodotta. Questo favorisce la successiva espansione del gas, con
conseguente diminuzione della temperatura e quindi di energia generata.
Come si può osservare in figura 2.1, lo spostamento relativo δr/R assume
valori ridotti in corrispondenza del centro della stella, quindi la variazione
in velocità delle reazioni nucleari non è importante al punto da giustificare
da sola l’eccitazione delle pulsazioni.
20
Capitolo 2: Fenomeni non adiabatici
Figura 2.1: Modi radiali per una stella pulsante di 12 M⊙ .[6]
2.3.2
Meccanismi k e γ
Si considerano ora soltanto gli strati più esterni della stella in quanto è
in queste regioni che si determina lo smorzamento o l’eccitazione di un
modo[5].
In queste zone la generazione di energia per reazioni nucleari può essere
trascurata
1
dq
=− ∇·F
(2.11)
dt
ρ
Per un sistema a simmetria sferica
∇·F=
1 ∂(r2 F )
1 ∂L
=
2
r
∂r
4πr2 ∂r
(2.12)
definendo la luminosità radiativa come
L ≡ 4πr2 F
(2.13)
Per una shell sferica che si muove radialmente si ha inoltre dm = 4πρr2 dr
, da cui
1
∂r
(2.14)
=
∂m
4πρr2
e quindi
dq
1
∂L
=− ∇·F=−
dt
ρ
∂m
21
(2.15)
Capitolo 2: Fenomeni non adiabatici
Dalla (2.9) e dalla (2.15) si può ora ricavare la parte immaginaria della
frequenza
Cr
η≃
(2.16)
2ωr2 I
con
Z
d
δL
δρ
dm
(2.17)
(Γ3 − 1)
Cr ≃ −L
dm L
V ρ
e
Z
I=
ρ|δr|2 dV
(2.18)
V
La stabilità di un modo dipende ora dal segno di Cr , ovvero se Cr > 0 la
parte immaginaria di ω è positiva e il modo è instabile. A sua volta, poiché
nelle regioni esterne si può assumere[5] δρ di segno costante, il segno di Cr
dipende dalla variazione di δL.
Considerando per esempio la fase di compressione, δρ > 0 e se δL decresce verso la superficie l’integrale è negativo, Cr > 0 e le oscillazioni vengono
eccitate. Un δL decrescente in fase di compressione implica che la luminosità radiativa entrante nella parte inferiore di una shell è maggiore di quella
uscente dalla parte superiore.
L’opposto accade durante l’espansione, e in definitiva si ha un meccanismo a valvola che eccita le oscillazioni.
La luminosità radiativa può essere espressa come[6]
L=−
4ac
d ln T
16π 2 r4 T 4
3k
dm
(2.19)
da cui la perturbazione Lagrangiana
δL
δr
δT
δρ
= 4 + (4 − kT )
− kρ −
L
r
T
ρ
d ln T
dm
−1
d
dm
δT
T
(2.20)
dove
kT =
kρ =
∂ ln k
∂ ln T
∂ ln k
∂ ln ρ
22
ρ
T
(2.21)
Capitolo 2: Fenomeni non adiabatici
Si considerano ora oscillazioni radiali di basso ordine4 nella fase di
compressione (δρ > 0). Il termine δT /T è pressoché costante in questa situazione[5], quindi d(δT /T )/dm può essere trascurato. Inoltre δr/r
assume valori ridotti, come si può osservare in figura 2.1.
In prima approssimazione si può quindi scrivere
δL
δT
δρ
≃ (4 − kT )
− kρ
L
T
ρ
(2.22)
Nelle regioni in cui il moto è quasi-adiabatico5 δT /T ≃ (Γ3 − 1)δρ/ρ e la
(2.22) diventa
δρ
δL
≃ [(4 − kT )(Γ3 − 1) − kρ ]
L
ρ
(2.23)
Nella maggior parte delle stelle, tenendo conto della legge di Kramer (2.3),
kρ è prossimo all’unità e kT è negativo, Γ3 ≃ 5/3 e δρ/ρ aumenta spostandosi verso la superficie[5].
Dalla (2.23) segue quindi che di norma δL cresce verso la superficie e
dunque, dalla (2.17), Cr < 0 e le oscillazioni sono smorzate.
Ci sono due circostanze in cui δL può decrescere e quindi determinare
Cr > 0: un decremento di Γ3 (meccanismo γ) oppure un aumento di kT
(meccanismo k).
Entrambe le condizioni si verificano in zone parzialmente ionizzate.
Il decremento dell’esponente adiabatico, mostrato in figura 2.2, è dovuto
al ridotto incremento in temperatura di uno strato ionizzato sottoposto
a compressione: la maggior parte dell’energia viene infatti impiegata per
ionizzare ulteriolmente il gas. Si ha inoltre una tendenza ad avere dei picchi
di kT proprio in queste zone.[5]
Le principali zone di parziale ionizzazione coinvolte nei meccanismi k
e γ sono due e la loro posizione all’interno di una stella dipende dalla
temperatura di quest’ultima, come mostrato in figura 2.3.
4
Si ritiene che i meccanismi k e γ siano responsabili anche dell’eccitazione delle
pulsazioni non radiali.
5
Si veda la (1.8).
23
Capitolo 2: Fenomeni non adiabatici
Figura 2.2: Andamento di Γ3 − 1 in funzione della temperatura in presenza di
una zona di parziale ionizzazione He+ .[5]
Figura 2.3: Zone di parziale ionizzazione per tre stelle di temperature differenti.
Sull’asse y è riportato il logaritmo della frazione della massa tra la posizione
considerata e la superficie della stella.[6]
Nella prima, caratterizzata da una temperatura compresa tra 104 K e
1.5 · 104 K, ha luogo la ionizzazione dell’atomo di idrogeno (H I → H II)
e la prima ionizzazione dell’elio (He I → He II) ed è chiamata zona di
ionizzazione parziale dell’idrogeno.
24
Capitolo 2: Fenomeni non adiabatici
La seconda, con temperatura di circa 4 · 104 K, riguarda la seconda
ionizzazione dell’atomo di elio (He II → He III) ed è detta zona di ionizzazione parziale di He II. Nella maggior parte delle stelle è proprio
questa zona a determinarne l’instabilità.
Tornando all’equazione per l’energia (1.8), esprimendo dq/dt come nella
(2.4) e il flusso come nella (2.12) e calcolandone infine la perturbazione
Lagrangiana, si ottiene6
d δL
d δρ
L
d δT
− (Γ3 − 1)
≃−
(2.24)
dt T
dt ρ
4πρr2 cV T dr L
Indicando con ∆(δL/L) e ∆m le differenze tra i valori assunti in superficie e
nella posizione considerata, < cv T > la media su tale regione, dalla (2.24),
dopo aver integrato sul periodo Π del modo considerato, si può scrivere
δL
δT
δρ
∆
∼Ψ
(2.25)
− (Γ3 − 1)
L
T
ρ
con
< cV T > ∆m
(2.26)
ΠL
che altro non è che il rapporto tra l’energia dello strato esterno e l’energia
irradiata dalla stella in un periodo.
Vicino la superficie ∆m ≪ 1 e dunque Ψ ≪ 1, quindi l’energia irradiata
su un periodo è di gran lunga maggiore dell’energia dello strato esterno.
Il moto è non adiabatico ed inoltre la perturbazione in luminosità non
subisce variazioni in quanto ∆(δL/L) ∼ 0. In questo caso si dice che la
perturbazione della luminosità radiativa è congelata.
A grande profondità invece Ψ ≫ 1, ovvero l’energia dello strato è molto
più grande dell’energia irradiata in un periodo, quindi il moto può essere
approssimato come adiabatico.
La transizione tra adiabaticità e non adiabaticità avviene in corrispondenza di una regione di transizione dove
Ψ=
< cV T >T R (∆m)T R
∼1
ΠL
6
É stato trascurato il termine in ε per quanto detto nella sezione precedente.
25
(2.27)
Capitolo 2: Fenomeni non adiabatici
La stabilità di un modo di oscillazione dipende dalla posizione delle zone
di ionizzazione rispetto alla regione di transizione.
Infatti, considerando soltanto la zona He+ , in stelle molto calde la zona
di ionizzazione si trova nei pressi della superficie, al di sopra della zona
di transizione (figura 2.4). Al di sotto della zona di transizione si è nell’approssimazione adiabatica e δL/L aumenta verso l’esterno7 , mentre al di
sopra il moto è non adiabatico e δL/L è pressoché costante.
Tutte le shell contribuiscono a rendere negativo Cr e la stella è stabile.
Figura 2.4: δL/L in funzione del raggio. La zona di parziale ionizzazione è
vicino la superficie e non contribuisce ad eccitare le oscillazioni in quanto la
perturbazione è congelata.[5]
Si prenda ora in considerazione una stella più fredda (figura 2.5), nella quale la zona di ionizzazione si trova in prossimità della regione di
transizione.
In profondità vale quanto detto sopra, quindi δL/L è crescente e contribuisce a smorzare le oscillazioni. La parte inferiore della zona di ionizzazione, trovandosi nella regione adiabatica, porta ad una forte diminuzione
di δL/L che contribuisce invece ad eccitare le oscillazioni.
Infine, nella regione esterna non si può avere una variazione della perturbazione in luminosità e quindi influisce sull’eccitazione.
In questa situazione può essere Cr > 0 e la stella pulsa.
7
Come osservato nella (2.23).
26
Capitolo 2: Fenomeni non adiabatici
Figura 2.5: δL/L in funzione del raggio. La zona di parziale ionizzazione si
trova in corrispondenza della regione di transizione e contribuisce ad eccitare le
oscillazioni.[5]
Infine, per temperature ancora più basse la zona di ionizzazione è contenuta interamente nella regione quasi-adiabatica ma entrano in gioco effetti
convettivi che contribuiscono a smorzare le oscillazioni.[6]
Il discorso appena concluso spiega la presenza di una determinata porzione del diagramma HR, la cosiddetta striscia di instabilità, nella quale
sono presenti la maggior parte delle stelle pulsanti per le quali le oscillazioni
sono imputabili ai meccanismi k e γ.
Infatti è possibile ricavare la pendenza di questa retta e la sua posizione
semplicemente imponendo che la temperatura (o il raggio) della stella debba
essere tale da far cadere la zona di ionizzazione in prossimità della regione
di transizione.
27
Capitolo 3
Delta Scuti
In questo capitolo verranno descritte le principali proprietà di una classe di
variabili pulsanti, ovvero le Delta Scuti.
3.1
Nozioni generali
Le stelle di tipo Delta Scuti sono stelle pulsanti di classe spettrale compresa
tra A2 ed F8 e luminosità tra V (nane) e III (giganti). Nel diagramma
HR occupano la regione in cui la sequenza principale interseca la linea di
instabilità ed hanno masse comprese tra 1.5 e 2.5 M⊙ .
Le pulsazioni osservate sono sia di tipo radiale che non radiale (p, g e
miste), con periodi compresi tra i 30 minuti e le 8 ore.
Sono a loro volta suddivise in due gruppi in base alle ampiezze delle
oscillazioni:
• Le High Amplitude Delta Scuti stars (HADS) presentano variazioni in banda V comprese tra 0.1 e 0.9 mag con semplici curve di
luce in quanto oscillano radialmente.
Sono studiate principalmente per la determinazione delle distanze
in modo analogo alle Cefeidi poiché hanno una definita relazione
periodo-luminosità.[8]
• Le Low Amplitude Delta Scuti stars (LADS), le più diffuse,
mostrano ampiezze in banda V ≤ 0.1 mag e periodi più corti delle
HADS. Con osservazioni fotometriche si osservano contemporaneamente diversi1 modi non radiali con 0 < n < 7 e l ≤ 3 ma con analisi
spettroscopiche sono stati osservati modi con l fino a 20.
Un secondo tipo di classificazione si basa sull’abbondanza metallica.
Le stelle ricche di metalli, ovvero di Popolazione I, sono denominate
semplicemente Delta Scuti, mentre quelle povere di metalli (Popolazione
II) sono dette SX Phoenicis.
1
Ad esempio per le stelle FG Virginis e XX Pyxidis sono stati osservati almeno una
dozzina di modi non radiali.
29
Capitolo 3: Delta Scuti
Il prototipo di queste variabili è la stella Delta Scuti, la cui magnitudine
apparente oscilla tra i valori +4.60 e +4.79 con periodo di 4.65 ore.
La scoperta[9] della variabilità di Delta Scuti è attribuita a W.W Campbell e W.H. Wright[10] i quali, tramite uno spettrografo, osservarono la
variazione della velocità radiale di alcune stelle tra cui proprio Delta Scuti.
In seguito E. Fath[11] e A. Colacevich[12] con misure rispettivamente fotometriche e spettroscopiche determinarono un periodo pari a 0.1937
giorni, al quale si aggiungeranno nel 1937 diversi altri periodi indipendenti.
Nel 1938 T. Sterne[13] affermò che non tutti i periodi osservati erano
dovuti ad oscillazioni semplicemente radiali in quanto i rapporti delle loro
ampiezze non erano congruenti con quelli previsti teoricamente.2
3.2
Double-Mode HADS
Un sottoinsieme delle HADS è quello delle Double-Mode HADS costituito da Delta Scuti che pulsano principalmente in due modi radiali. Sono
quindi caratterizzate da due periodi P0 e P1 e ciò che si osserva (e si predice
tramite modelli) è che il loro rapporto P1 /P0 ∼ 0.77.
Questa proprietà può essere osservata nel cosiddetto diagramma di
Petersen mostrato in figura 3.1, nel quale è riportato il rapporto P1 /P0
in funzione di P0 per diverse Delta Scuti. Si può notare un andamento
pressoché lineare: un fit dei valori sperimentali dà la seguente relazione[14]
P1
= −0.084809(±0.008298)P0 + 0.782048(±0.000995)
P0
(3.1)
Figura 3.1: Diagramma di Petersen per diverse Delta Scuti. La linea rossa
rappresenta il fit lineare.[14]
2
Si veda il paragrafo successivo.
30
Capitolo 3: Delta Scuti
3.3
Effetto Blazhko
Nella maggior parte delle stelle pulsanti sono state osservate variazioni dei
periodi e delle ampiezze dei modi di oscillazioni. Questo fenomeno fu inizialmente osservato per la classe delle RR Lyrae ed è stato denominato
effetto Blazhko.
Le Delta Scuti non fanno eccezione: nell’articolo di Breger[15] sono
analizzate le misure fotometriche riferite alla stella 4 CVn per il periodo
1966-1997. La stella in esame presenta variazioni annuali del 12% sulle
ampiezze di alcuni modi e ciò avviene in maniera ciclica, quindi sono escluse
cause evolutive. Ad esempio il modo con frequenza ∼ 7.38 cicli/giorno
(c/d) ha mostrato un decremento dell’ampiezza dalle 15 mmag del 1974
alle 4 mmag del 1976, fino ad 1 mmag nel 1977, per poi aumentare (in alto
in figura 3.2). Il modo ha presentato variazioni anche in frequenza (figura
3.3) e in fase (in basso in figura 3.2).
Figura 3.2: In alto andamento dell’ampiezza dal 1974 al 1978 per il modo di
frequenza 7.375 c/d della stella 4 CVn. I numeri al di sopra dei punti rappresentano il numero di giorni in cui sono state effettuate le misure. In basso è
rappresentato lo shift della fase.[15]
31
Capitolo 3: Delta Scuti
Figura 3.3: Andamento della frequenza nel tempo per il modo di ∼ 7.38 c/d.[16]
Queste modulazioni possono essere suddivise in due categorie: quelle
che avvengono su scale temporali minori di un anno e quelle con tempi più
lunghi.
Per la prima categoria la causa è da ricercare[16] nei battimenti, ovvero
la sovrapposizione di modi di oscillazione con frequenze vicine che, come
visto nel paragrafo precedente, sono comuni nelle Delta Scuti.
Modulazioni su periodi più lunghi sono state invece interpretate[16]
come variazioni della rotazione differenziale delle stelle.
3.4
Selezione dei modi di oscillazione
Comparando gli spettri delle frequenze ottenuti da modelli con quelli sperimentali (figura 3.4) si nota come non tutti i modi siano osservati. Allo
stesso tempo si osserva una certa regolarità come nel caso della Delta Scuti
44 Tau (figura 3.5).
Come descritto nell’articolo di Breger et al[17], soltanto nell’intervallo
5.3 − 12.7 c/d sono presenti frequenze indipendenti, mentre le restanti sono
loro combinazioni del tipo afi ± bfj oppure armoniche. Allo stesso tempo le
frequenze indipendenti formano tre raggruppamenti, cosa che si rispecchia
anche nelle combinazioni. Due di questi gruppi si trovano in corrispondenza
di due modi radiali, ovvero del modo fondamentale e del primo overtono,
rispettivamente a 6.90 e 8.96 c/d.
Un terzo modo radiale è predetto ma non osservato e si trova proprio in
corrispondenza del terzo gruppo, a 11.21 c/d.
Quanto detto fa ipotizzare che le frequenze dei modi non radiali sono
distribuite in ristretti gruppi intorno ai modi radiali, cosa che è effettiva32
Capitolo 3: Delta Scuti
mente osservata nella maggior parte delle Delta Scuti, ma non è ancora
chiaro come avvenga questa selezione.
Figura 3.4: Frequenze osservate e teoriche della Delta Scuti FG Vir. Sono
riportate soltanto frequenze con ampiezze > 0.5 mmag.[17]
Figura 3.5: Frequenze osservate nella stella 44 Tau, con evidenziato il range di
frequenze indipendenti. Le ampiezze sono su scala logaritmica.[17]
33
Parte II
Acquisizione e analisi di dati
sperimentali
35
Capitolo 4
Acquisizione e calibrazione delle immagini
Il capitolo è dedicato alla prima fase della parte sperimentale, l’acquisizione e la riduzione delle immagini, con una breve introduzione sull’oggetto
studiato.
4.1
AU CrB
Figura 4.1: Vista della stella AU CrB.[18]
La stella scelta come target è AU CrB, una Double-Mode HADS di magnitudine media 11.981 in banda V e di coordinate equatoriali α2000 =
16h 13m 31.707s δ2000 = +32◦ 34′ 42.82′′ .
E’ stata identificata come stella variabile dal ROTSE1 2 nel 2000 ed
inizialmente classificata nel gruppo delle Cefeidi a causa del periodo allora
determinato di 1d .52315.
Nell’articolo di Wils et al[19] il periodo del modo fondamentale è stato
corretto a soli 0.05172 giorni, con una ampiezza di 0.085 magnitudini in
banda V. Nello stesso articolo sono state identificate altre frequenze, riportate in tabella 4.1. In figura 4.2 è mostrata la curva di luce, ovvero il
1
2
Catalogo Tycho-2.
Robotic Optical Transient Search Experiment 1.
37
Capitolo 4: Acquisizione e calibrazione delle immagini
grafico delle variazioni in magnitudine rispetto al tempo, insieme alla curva
ottenuta dalle frequenze di tabella 4.1.
f1
f2
2 f1
f1+f2
Frequenza
19.335
25.005
38.670
44.339
Ampiezza
0.085
0.06
0.02
0.02
Tabella 4.1: Frequenze estratte nell’articolo di Wils et al.[19]
Il rapporto P1 /P0 = f1 /f2 è pari a 0.773 mentre quello predetto dalla
(3.1) è 0.778.
Figura 4.2: Curva di luce sperimentale e fit ottenuto con le frequenze di tabella
4.1. Le variazioni sono espresse in magnitudini.[19]
4.2
Osservazioni
Per questa trattazione sono state acquisite 62 immagini in filtro R di Bessell
con tempo di esposizione di 120 s tra le 21:11 e le 23:27 CET del giorno
01/06/2016 presso l’osservatorio astronomico dell’Università degli Studi di
Salerno.
Per la calibrazione3 sono stati acquisiti 5 sky-Flats a 2 s, 5 Dark frame
a 2 s e altri 5 a 120 s.
Il telescopio usato è un Ritchey-Chrétien PRO RC600 di Officina Stellare con diametro pari a 0.60 m e rapporto focale f/8, sostenuto da una
3
Il processo di calibrazione è descritto nel paragrafo successivo.
38
Capitolo 4: Acquisizione e calibrazione delle immagini
montatura equatoriale GM-4000 HPS, mentre la CCD è una FingerLakes
Instrument Proline 9000.
4.3
Calibrazione
Le immagini ottenute devono essere calibrate[20] per poter essere ritenute
scientifiche. Indicando con Rij la matrice dei pixel4 dell’immagine grezza e
con Sij il segnale astronomico, per una risposta lineare la relazione tra le
due quantità è del tipo
Rij = Aij Sij + Bij
(4.1)
dove il coefficiente Aij tiene conto della risposta di ogni pixel e dipenderà
sia dalla sua efficienza che da eventuali imperfezioni delle ottiche, mentre il
termine Bij non è dovuto al segnale luminoso ma a cause interne alla CCD.
Entrambi i termini sono soggetti a fluttuazioni casuali.
Calibrare un’immagine vuol dire ottenere Sij a partire da Rij , ovvero
invertire la (4.1). Per fare ciò si acquisiscono principalmente due ulteriori
tipi di immagini: i dark frame e i flat-field frame.
I dark frame Dij sono immagini a tempo di esposizione e temperatura
uguali a quelli dell’immagine Rij ma ad otturatore chiuso, quindi con Sij =
0. Prendendo diversi dark frame e calcolandone la mediana D̄ij si ottiene
una stima del valor medio di Bij
< Bij >∼
= D̄ij
(4.2)
I flat-field frame Fij sono immagini di una sorgente uniforme5 in tutto il
campo, ovvero Sij = c. L’immagine sarà quindi data da
Fij = Aij c + Bij
(4.3)
Anche delle immagini di flat-field vanno acquisiti e quindi sottratti i relativi
dark frame DFij
(k)
(k)
¯ ij
F̃ij = Fij − DF
(4.4)
I flat ridotti vengono portati allo stesso valor medio6
(k)
(k) F̃
F̂ij = F̃ij
4
(1)
F̃ (k)
(4.5)
Il generico elemento Rij di tale matrice rappresenta il valore in ADU assegnato al
pixel di coordinate (i, j).
5
Un esempio è il cielo al crepuscolo: in tal caso si parla di sky-flat.
6
Procedura fondamentale proprio per gli sky-flat in quanto il valor medio del fondo
cielo diminuisce rapidamente dopo il tramonto.
39
Capitolo 4: Acquisizione e calibrazione delle immagini
ed in seguito se ne calcola la mediana F¯ij .
Il valor medio di Aij può ora essere stimato a meno di una costante di
normalizzazione Ā
F̄ij
< Aij >∼
Ā
(4.6)
=
F̄
Calcolati i valor medi di Aij e Bij è ora possibile invertire la (4.1) ed ottenere
il segnale astronomico Sij sul quale può essere effettuata l’analisi.
Un esempio di immagine calibrata è mostrato in figura 4.3.
Figura 4.3: Immagine calibrata in cui sono annotate alcune stelle del campo.
40
Capitolo 5
Fotometria e analisi dei dati
In questo capitolo verrà descritta la fase di analisi dei dati scientifici che nel
caso specifico riguarda la fotometria differenziale e lo studio dello spettro
delle frequenze di un segnale variabile nel tempo. Saranno infine confrontati
i risultati ottenuti con quanto presente in letteratura.
5.1
Fotometria differenziale
Nell’analisi del flusso di stelle variabili si è interessati principalmente alla
sua variazione piuttosto che al suo valore assoluto.
Come si può osservare dalla (4.6), i valori in ADU delle stelle nell’immagine calibrata sono direttamente proporzionali ai flussi tramite lo stesso
coefficiente Ā
ADUi = Āεi
(5.1)
Le corrispondenti magnitudini strumentali saranno
m̃i ≡ −2.5 log10 ADUi = −2.5 log10
εi
− 2.5 log10 ε0 Ā = mi + m0
ε0
(5.2)
e la differenza tra magnitudini strumentali di due stelle sarà equivalente
alla differenza tra le magnitudini assolute
m̃1 − m̃2 = m1 − m2
(5.3)
Per essere sicuri che le variazioni di magnitudine di una stella siano intrinseche, conviene scegliere diverse stelle di riferimento e confrontare i loro
flussi con quello della stella ritenuta variabile.
Il flusso in ADU può essere calcolato tramite la fotometria d’apertura.
Si determina innanzitutto il centroide della stella e si tracciano tre circonferenze centrate in esso come mostrato nella figura 5.1. La somma ADU ∗
dei conteggi degli n pixel presenti nell’area delimitata dalla circonferenza di
raggio più piccolo (raggio di apertura) sarà data da un contributo dovuto
al fondo cielo e da un altro dovuto al segnale della stella. La media dei
conteggi nella corona circolare esterna dà invece una stima del fondo cielo
41
Capitolo 5: Fotometria e analisi dei dati
B̄ che può essere sottratta al valore ADU ∗ per ottenere il flusso ADU della
stella ADU = ADU ∗ − nB̄.
L’errore sul calcolo del flusso sarà anche funzione del raggio d’apertura
r. Infatti, per r piccoli si hanno pochi pixel per stimare il flusso della stella
e l’errore è dovuto alle fluttuazioni quantistiche, mentre per r grandi il
segnale è dominato dal fondo cielo.
La fotometria è stata effettuata tramite il software AstroimageJ impostando un raggio d’apertura pari a 1.15 volte la FWHM1 e scegliendo come
stelle di riferimento quelle mostrate in figura 5.1. Alcune stelle non sono
state selezionate in quanto sature.
Figura 5.1: Dischi di apertura: in rosso le stelle di riferimento, in verde la stella
variabile.
1
La Full Width Half Maximum è definita come la larghezza a metà altezza della
distribuzione devi valori in ADU di una stella sui pixel.
42
Capitolo 5: Fotometria e analisi dei dati
La curva di luce ottenuta è riportata in figura 5.2.
Figura 5.2: I punti di colore blu rappresentano la variazione della magnitudine
della stella pulsante, normalizzata e moltiplicata di un fattore 100. I punti di
colore diverso sono invece relativi alle stelle di riferimento.
43
Capitolo 5: Fotometria e analisi dei dati
5.2
Spettro delle frequenze
I dati sperimentali sono stati analizzati tramite il software Period04 [21] che
si basa sulla Trasformata Discreta di Fourier.
Dalla curva di luce è stato ottenuto lo spettro delle frequenze mostrato in
figura 5.3. Si può notare un picco in prossimità della frequenza F 1 = 21.111
c/d con ampiezza A1 = 0.084 mag.
Figura 5.3: Ampiezza in magnitudini in funzione delle frequenze espresse in
c/d.
É stato in seguito effettuato un fit dei minimi quadrati con l’equazione
∆m(t) = Z + A1 sin(2π(Ω1 t + Φ1 ))
(5.4)
dove ∆m(t) è la variazione in magnitudine della stella pulsante, Ω1 la frequenza F 1 espressa in Hz e A1 e Φ1 rispettivamente l’ampiezza e la fase di
F 1. Z è invece ∆m(0).
In tal modo è stata ricavata la fase Φ1 (figura 5.4).
Sono stati quindi calcolati i residui tra il fit e i dati originari, ottenendo
quanto mostrato in figura 5.5. Questa procedura, detta anche di prewhitening, equivale a ”rimuovere” dal segnale la frequenza F 1 per cercare altri
picchi nello spettro delle frequenze.
44
Capitolo 5: Fotometria e analisi dei dati
Figura 5.4: Diagramma di fase per la frequenza F 1.
Figura 5.5: Residui tra la curva di luce e il fit con l’equazione (5.4). Hanno
una distribuzione chiaramente periodica, indice della presenza di altre frequenze
necessarie a ricostruire la curva di luce.
Come si può notare è presente ancora una periodicità nel segnale.
45
Capitolo 5: Fotometria e analisi dei dati
É stata effettuata nuovamente un’analisi di Fourier, questa volta sui
residui, per ottenere lo spettro mostrato in figura 5.6.
Figura 5.6: Spettro delle frequenze ottenuto a partire dai residui. Ampiezza in
magnitudini, frequenze in c/d.
E’ stato identificato un picco in corrispondenza della frequenza
F 2 = 43.278 c/d di ampiezza A2 = 0.015 mag.
É stato eseguito un nuovo fit, questa volta includendo sia la frequenza
F 1 che F 2
2
X
Ai sin(2π(Ωi t + Φi ))
(5.5)
∆m(t) = Z +
i=1
in modo da calcolare Φ2 e correggere Φ1 .
Il processo descritto è stato ripetuto finché non sono state più estratte
frequenze con ampiezza apprezzabile.
Eliminando dallo spettro le frequenze estratte e mediando il fondo restante si è ottenuta una stima del rumore. Il rapporto tra l’ampiezza di ogni
frequenza e il rumore è definito come rapporto segnale/rumore S/N ; di
norma[22] si considerano come intrinseche della stella soltanto frequenze
con S/N ≥ 4.
46
Capitolo 5: Fotometria e analisi dei dati
In definitiva sono state estratte le 5 frequenze riportate in tabella 5.1.
Nr.
F1
F2
F3
F4
F5
Frequenza
21.11
43.3
29.5
11.08
64
Ampiezza
0.086
0.015
0.007
0.005
0.003
Fase
0.419
0.206
0.19
0.478
0.94
S/N
7.732
8.071
5.456
5.690
4.487
Tabella 5.1: Frequenze espresse in c/d, ampiezze in magnitudini e fasi in
radianti.
Nella figura 5.7 è riportato il fit ottenuto con le frequenze di tabella 5.1.
Figura 5.7: Fit con le frequenze di tabella 5.1.
L’incertezza sui valori delle frequenze, ampiezze e fasi è stata stimata
tramite le seguenti relazioni[23]
r
6 1 σ(m)
σ(f ) =
N πT A
r
2
(5.6)
σ(m)
σ(A) =
N
r
2 σ(m)
1
σ(Φ) =
2π N A
dove N è il numero di punti, T la durata temporale del set di dati e σ(m)
i residui medi del fit.
47
Capitolo 5: Fotometria e analisi dei dati
I valori ottenuti tramite le (5.6) sono riportati in tabella 5.2.
Nr.
F1
F2
F3
F4
F5
σ frequenza
0.03
0.2
0.5
0.09
1
σ ampiezza
0.001
0.001
0.001
0.001
0.001
σ fase
0.001
0.006
0.01
0.002
0.03
Tabella 5.2: Incertezze in c/d per le frequenze, magnitudini per le ampiezze e
radianti per le fasi.
5.3
Conclusioni
Confrontando i valori ottenuti con quelli riportati nell’articolo[19], F 1 può
essere identificata come il modo fondamentale (n = 0) mentre F 2 e F 5 sono
rispettivamente la seconda e terza armonica di F 1.
Il secondo modo radiale (n = 1) potrebbe essere F 3, ma l’ampiezza differisce di molto da quella riportata nell’articolo e anche il rapporto ottenuto
F3 /F1 , pari a 0.716, si discosta dal valore 0.773. Essendo radiali (l = 0,
m = 0) queste oscillazioni sono di tipo p.
Il modo F 4 non è ritenuto intrinseco della stella per via del periodo pari
proprio alla finestra osservativa e per la mancanza di riscontro con l’articolo
di Wils et al.
In generale l’identificazione dei modi di oscillazione è ben più complicata
e richiede l’uso combinato di osservazioni spettroscopiche e fotometriche in
diverse bande2 .
La conoscenza del maggior numero possibile di modi di oscillazione è
fondamentale per uno studio di astrosismologia e quindi è importante effettuare misure molto accurate. Il problema principale di un’analisi fotometrica effettuata dalla superficie terrestre è la scintillazione, ovvero variazioni
irregolari del flusso misurato per colpa della turbolenza atmosferica.
Una soluzione è quella di effettuare osservazioni con telescopi spaziali
come nel caso di Kepler che ha permesso l’analisi statistica di migliaia di
stelle Delta Scuti. L’alta qualità e la mole dei dati ha mostrato come le
basi teoriche sono lontane dall’essere perfette. Non solo i problemi della
selezione dei modi di oscillazione e della limitazione delle ampiezze non
2
Ad esempio seguendo il metodo di Baade-Wesselink[24] o il più recente di DaszyńskaDaszkiewicz[25].
48
Capitolo 5: Fotometria e analisi dei dati
sono ancora risolti, ma è inspiegabile anche il fatto che più della metà delle
stelle presenti nella regione delle delta Scuti non mostra pulsazioni.[26]
Un altro aiuto nell’identificazione dei modi è fornito da sistemi binari
eclissanti grazie al cosiddetto eclipse mapping[27]. Durante l’eclissi diverse
parti della superficie stellare diventano invisibili: per oscillazioni non radiali questo implica che soltanto una parte della pulsazione è osservata e
l’ampiezza e la fase variano a seconda del tipo di modo, permettendo di
identificarlo.
Anche l’osservazione di pulsanti in cluster stellari (ensemble asteroseismology) risulta importante in quanto le stelle componenti si assumono
avere stessa età e composizione chimica3 , parametri che sono ben determinati dalle proprietà del cluster stesso e che possono quindi essere imposti
nei modelli sismici.
Altri problemi che richiedono ulteriori sviluppi riguardano la trattazione
di campi magnetici, della convezione e della rotazione veloce di una stella,
nonché dell’inclusione di elementi più pesanti nel computo dell’opacità. La
comprensione dei meccanismi di pulsazione nelle stelle è importante anche
per capire meglio l’evoluzione del Sole e le sue oscillazioni e quali siano i
riflessi che queste hanno sul clima della Terra.
É da evidenziare inoltre la sinergia che ha questo tipo di studi con la
ricerca di pianeti extrasolari, sia dal punto di vista prettamente sperimentale4 sia perché la conoscenza dei parametri fisici della stella madre permette
di identificare la zona abitabile del sistema in esame.[29]
Grazie a dati sempre più accurati ottenuti dai satelliti, ci sono buone prospettive per una comprensione più profonda delle pulsazioni e della
struttura stellare nei prossimi 10-15 anni.
3
In quanto generati dalla stessa nube interstellare.
Uno dei metodi attualmente utilizzati per la ricerca di un pianeta extrasolare è
l’osservazione del suo transito davanti la stella madre, cosa che comporta una variazione
in luminosità dell’astro. Oltre al simile approccio, l’astrosismologia è anche in grado di
dare informazioni sull’orbita del pianeta in assenza di transito.[28]
4
49
Bibliografia
[1] N. N. Samus, E. V. Kazarovets, and O. V. Durlevich. General Catalogue of Variable Stars. Odessa Astronomical Publications, 14,
2001.
[2] G. Handler. Asteroseismology. 2013.
[3] J. P. Cox. Theory of stellar pulsation. 1980.
[4] J. P. Cox and R. T. Giuli. Principles of stellar structure . 1968.
[5] J. Christensen-Dalsgaard. Lecture Notes on Stellar Oscillations. 2003.
[6] Dale A. Ostlie Bradley W. Carrol. An Introduction to Modern
Astrophysics. Pearson, Edinburgh Gate, 2014.
[7] R. Smolec. Mode selection in pulsating stars. In J. A. Guzik, W. J.
Chaplin, G. Handler, and A. Pigulski, editors, Precision Asteroseismology, volume 301 of IAU Symposium, pages 265–272, February
2014.
[8] D. H. McNamara, J. B. Madsen, J. Barnes, and B. F. Ericksen. The
Distance to the Galactic Center. In L. Szabados and D. Kurtz, editors,
IAU Colloq. 176: The Impact of Large-Scale Surveys on Pulsating Star
Research, volume 203 of Astronomical Society of the Pacific Conference
Series, pages 208–211, 2000.
[9] AAVSO. Delta scuti and the delta scuti variables.
[10] W.W Campbell and W.H Wright. A list of nine stars whose velocities
in the line of sight are variable. APJ, 12, 1900.
[11] E.A Fath. The variability of delta scuti. pasp, 47, 1935.
[12] A. Colacevich. On the variable radial velocity of delta scuti. pasp, 47,
1935.
[13] T.E. Sterne. The secondary variation of delta scuti. ApJ, 87, 1938.
[14] R. Furgoni. Analysis Of The Petersen Diagram Of Double Mode High
Amplitude delta Scuti Stars. Journal of the American Association of
Variable Star Observers (JAAVSO), February 2016.
51
Bibliografia
[15] M. Breger. Asteroseismology of Delta Scuti Stars. Baltic Astronomy,
9:149–163, 2000.
[16] M. Breger. The Blazhko Effect in Delta Scuti and Other Groups of
Pulsating Stars. In C. Sterken, N. Samus, and L. Szabados, editors,
Variable Stars, the Galactic halo and Galaxy Formation, February
2010.
[17] M. Breger, P. Lenz, and A. A. Pamyatnykh. Towards mode selection
in δ Scuti stars: regularities in observed and theoretical frequency
spectra. mnras, 396:291–298, June 2009.
[18] F. Bonnarel, P. Fernique, O. Bienaymé, D. Egret, F. Genova, M. Louys,
F. Ochsenbein, M. Wenger, and J. G. Bartlett. The ALADIN interactive sky atlas. A reference tool for identification of astronomical sources.
aaps, 143:33–40, April 2000.
[19] P. Wils, P. Lampens, C. W. Robertson, and P. van Cauteren. A
New Double-Mode High-Amplitude delta Scuti Star: GSC 2583-00504.
Information Bulletin on Variable Stars, 5442, July 2003.
[20] V. Bozza. Appunti del corso di Laboratorio di Astrofisica, 2015.
[21] P. Lenz and M. Breger. Period04 User Guide. Communications in
Asteroseismology, 146:53–136, June 2005.
[22] M. Breger, J. Stich, R. Garrido, B. Martin, S. Y. Jiang, Z. P. Li,
D. P. Hube, W. Ostermann, M. Paparo, and M. Scheck. Nonradial
Pulsation of the Delta-Scuti Star Bu-Cancri in the Praesepe Cluster.
aap, 271:482, April 1993.
[23] M. Breger, G. Handler, R. Garrido, N. Audard, W. Zima, M. Paparó,
F. Beichbuchner, Z.-P. Li, S.-Y. Jiang, Z.-L. Liu, A.-Y. Zhou, H. Pikall,
A. Stankov, J. A. Guzik, M. Sperl, J. Krzesinski, W. Ogloza, G. Pajdosz, S. Zola, T. Thomassen, J.-E. Solheim, E. Serkowitsch, P. Reegen,
T. Rumpf, A. Schmalwieser, and M. H. Montgomery. 30+ frequencies
for the delta Scuti variable 4 Canum Venaticorum: results of the 1996
multisite campaign. aap, 349:225–235, September 1999.
[24] P. A. Stamford and R. D. Watson. Baade-Wesselink and related techniques for mode discrimination in nonradial stellar pulsations. apss,
77:131–158, June 1981.
[25] J. Daszyńska-Daszkiewicz.
two-passband photometry.
152:140–153, January 2008.
Identifying pulsation modes from
Communications in Asteroseismology,
52
Bibliografia
[26] L. A. Balona and W. A. Dziembowski. Kepler observations of δ Scuti
stars. mnras, 417:591–601, October 2011.
[27] M. D. Reed, B. J. Brondel, and S. D. Kawaler. Pulsating Stars in Close
Binaries. I. Investigations of Eclipse Mapping and Oblique Pulsations.
apj, 634:602–615, November 2005.
[28] D. J. Wright, A.-N. Chené, P. De Cat, C. Marois, P. Mathias, B. Macintosh, J. Isaacs, H. Lehmann, and M. Hartmann. Determination of the inclination of the multi-planet hosting star hr 8799 using
asteroseismology. The Astrophysical Journal Letters, 728(1):L20, 2011.
[29] F. Borsa and E. Poretti. The importance of asteroseismology in
exoplanetary science. Memorie della Società Astronomica Italiana
Supplementi, 20:25, 2012.
53