Prof. Alessandro Stranieri
Lezione n. 1
Richiami di meccanica
- Tipologie di movimento -
E’ opportuno iniziare questa sintesi degli elementi di
meccanica da applicare ai movimenti del corpo umano
precisando alcuni concetti sulle grandezze e la loro
misura.
la lunghezza
la superficie
Sono grandezze:
la velocità
il tempo
la tensione elettrica
Per convenzione, tutte le unità di misura delle
grandezze vengono riferite a poche unità
fondamentali ben determinate:
MKSA
Unità di lunghezza
METRO
Unità di massa
KILOGRAMMO
Unità di tempo
SECONDO
Unità di corr. elettrica
AMPERE
Per convenzione, tutte le unità di misura delle
grandezze vengono riferite a poche unità
fondamentali ben determinate:
MKSA
Unità di lunghezza
METRO
Unità di massa
KILOGRAMMO
Unità di tempo
SECONDO
Unità di corr. elettrica
AMPERE
Tutte le altre unità di misura delle
grandezze derivano da queste, o da loro
multipli e sottomultipli:
SUPERFICI
VELOCITA’
LAVORO
metro
metro + secondo
chilogrammo + metro + secondo
Esiste anche un altro sistema di misura denominato
CGS il quale prevede l’utilizzo di:
CGS
CENTIMETRO
GRAMMO
SECONDO
(E’ il meno utilizzato)
Per definire una grandezza, ci si serve di
solito del procedimento utilizzato per
misurarla, ad esempio:
VELOCITA’
è la grandezza che si ottiene
dividendo
la misura dello spazio percorso
per
la misura del tempo impiegato a percorrerlo.
VELOCITA’ =
spazio
tempo
Una grandezza risulta matematicamente definita quando
può essere rappresentata da un qualche ente matematico
che ne caratterizza tutte le proprietà.
Così una grandezza che può essere espressa solo tramite
un valore viene chiamata “Grandezza Scalare” è una
grandezza fisica che viene descritta, dal punto di vista
matematico, da uno scalare, cioè da un numero reale
associato a un'unità di misura (MODULO).
Viene così definita, poiché il suo valore può essere letto su
una scala graduata di uno strumento di misura e, a differenza
delle grandezze vettoriali, non necessita di altri elementi per
essere identificata.
Le grandezze sono
SCALARI
VETTORIALI
misura
misura +
direzione + verso
Per indicare la massa di un corpo, è sufficiente
indicare la sua misura in chilo-grammi;
Per precisare lo spostamento di un corpo, non basta
esprimere la sua distanza in metri dal punto da dove è
partito, ma occorre stabilire anche in quale direzione e
con che verso si è spostato.
Le grandezze vettoriali sono rappresentabili
graficamente con un vettore, ossia con un
segmento frecciato ad un'estremità.
vettore
direzione
verso
La retta su cui si trova il vettore è la direzione
della grandezza; la freccia indica il verso;
La lunghezza del vettore rappresenta il Modulo
del vettore, cioè il suo valore numerico;
E' chiaro che il concetto di movimento è un concetto
relativo: per essere valido deve essere riferito ad un
osservatore ben definito. Il viaggiatore seduto sul sedile
del rapido che passa veloce davanti ad una stazione è in
moto rispetto alla stazione, ma in quiete rispetto alla
giovane signora che gli siede davanti.
Il movimento di un punto nello spazio è perfettamente
definito quando se ne conoscono la traiettoria, il verso
di percorrenza della traiettoria e le relazioni tra i suoi
spostamenti e i tempi impiegati ad eseguirli.
La traiettoria è la linea costituita dalla successione
di punti geometrici che rappresentano le posizioni
successivamente occupate dal punto materiale.
Questa linea può essere un segmento di retta, una
circonferenza, una parabola, una curva più o meno
complessa. Il moto corrispondente si chiamerà
rettilineo, circolare, parabolico, curvilineo.
Nei movimenti del corpo umano nel suo insieme,
considerato come un punto materiale, possiamo
trovare esempi di ogni tipo.
Bisogna, inoltre, considerare i rapporti tra la posizione
del mobile sulla traiettoria e il tempo in cui tale
posizione viene occupata.
O
P
Scegliendo una posizione a caso (origine) sulla
traiettoria, la posizione del mobile può essere
definita, ad ogni istante, dalla lunghezza dell'arco
della traiettoria percorso a partire dall'origine.
In realtà il corpo umano,
(che non è riconducibile ad un punto materiale se non
per astrazione)
esegue quasi sempre movimenti assai complessi.
A questo punto è opportuno definire
la differenza tra spostamento e spazio.
SPOSTAMENTO
( simbolo: S )
E’ una grandezza vettoriale, con un modulo uguale
alla distanza tra il punto di partenza e il punto di
arrivo, la direzione della retta che congiunge questi
due punti e il verso dal primo al secondo.
In pratica la sua misura è la misura della distanza “in
linea d'aria” tra i due punti, ed è indipendente dal
cammino realmente compiuto dal corpo in movimento.
SPAZIO
( simbolo: S )
E’ una grandezza scalare che coincide con il cammino
effettivamente percorso dal corpo in movimento.
Convenzionalmente si definiscono
POSITIVI
gli spostamenti da
sinistra a destra e dal basso in alto
rispetto all'osservatore.
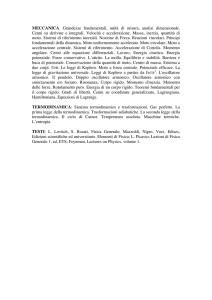
Nella traversata della Manica del 1955 è stato calcolato
che uno dei primi arrivati, anziché le 21,5 miglia che
separano la costa francese da quella inglese, aveva
percorso effettivamente 25,8 miglia.
21,5
A
25,8
C
B
AB è lo spostamento, ACB lo spazio realmente coperto dal nuotatore.
La prima cifra misura lo spostamento, la seconda lo spazio,
che il nuotatore ha dovuto coprire effettivamente, per il
continuo spostamento laterale che la corrente provocava.
velocita’ media
esprime la distanza percorsa nell'unità di tempo
velocita’ vettoriale media
esprime il rapporto tra lo spostamento e il tempo
La velocità media vettoriale è una grandezza che ha la
stessa direzione e lo stesso verso dello spostamento.
velocita’ media scalare
esprime il rapporto tra lo spazio e il tempo.
La velocità media scalare è il rapporto tra lo
spazio percorso e il tempo impiegato a percorrerlo.
100
150
100
V.M. 100 km/h
60
90
velocita’ istantanea
Si ottiene rendendo piccolo a piacere il tempo nella velocità
media. In pratica si va a definire la velocità per un certo
istante piuttosto che in un certo intervallo.
Questa grandezza, essendo una e una sola in ogni
istante, può venire rappresentata con un vettore
funzione del tempo. Questa è la velocità che il
tachimetro della Ferrari, se funziona, avrà segnalato
correttamente, momento per momento, durante il
tragitto.
accelerazione e moto
In un diretto dato correttamente, la traiettoria che il pugno
percorre è dovuta alla composizione dei movimenti che i singoli
segmenti (avambraccio, braccio, scapola, tronco) compiono nello
stesso tempo.
Quindi la velocità del pugno è uguale alla somma delle velocità
vettoriali dei diversi segmenti che si spostano
contemporaneamente.
accelerazione e moto
E’
una
traiettoria
rettilinea,
risultante
di
più
movimenti curvilinei, che viene percorsa in un tempo
molto inferiore (un quarto, se supponiamo di uguale
durata i singoli movimenti) a quello necessario
all'esecuzione consecutiva dei quattro movimenti.
accelerazione e moto
La velocità è pertanto quattro volte maggiore: e ben più
preoccupanti le conseguenze del pugno correttamente
eseguito.
La velocità di un punto lungo la traiettoria può non
essere costante: il moto in questo caso si dice vario.
accelerazione e moto
Il rapporto tra la differenza di velocità in due punti
della traiettoria e il tempo impiegato a percorrere lo
spazio tra i due punti si chiama accelerazione media
vettoriale.
Anche in questo caso, se l'intervallo di tempo
considerato è estremamente breve, l'accelerazione si
dice istantanea.
accelerazione e moto
L'accelerazione sarà positiva o negativa a seconda che il
suo verso coincida o no con il verso dello spostamento
del punto sulla traiettoria: nel primo caso aumenta, nel
secondo, diminuisce la velocità
Se un punto si muove lungo una traiettoria senza che
la sua velocità si modifichi, si parla invece di moto
uniforme.
accelerazione e moto
Se la traiettoria è rettilinea, il moto si chiama
rettilineo uniforme.
Si chiama invece rettilineo uniformemente accelerato
il moto di un punto che si sposta lungo una traiettoria
rettilinea con accelerazione costante e diversa da 0.
IL CORPO ESTESO RIGIDO
Vedremo ora di precisare i principi che caratterizzano
il moto dei corpi estesi nei confronti di quello dei corpi
puntiformi, principi necessari per comprendere il
significato del comportamento di quei corpi estesi di
primaria importanza che sono per noi il corpo umano
e i suoi segmenti.
IL CORPO ESTESO RIGIDO
partiamo da un'astrazione:
immaginiamo il corpo esteso, oggetto del nostro studio,
rigido, costituito cioè da un sistema di punti materiali
le cui distanze reciproche non si modificano per
effetto delle forze che agiscono sul corpo.
IL CORPO ESTESO RIGIDO
Un corpo esteso rigido può muoversi nello spazio con
tre tipi di moto:
traslatorio
rotatorio
rototraslatorio
IL CORPO ESTESO RIGIDO
traslatorio
IL CORPO ESTESO RIGIDO
Nel moto traslatorio, tutti i punti del corpo in
movimento si spostano nella stessa direzione con lo
stesso verso alla stessa velocità, descrivendo
traiettorie uguali e parallele tra di loro.
La formula del moto traslatorio di un corpo è
perciò uguale a quella di uno solo dei suoi punti.
IL CORPO ESTESO RIGIDO
Esempi, di moto traslatorio rettilineo sono la caduta di
un grave senza resistenze, la discesa in sci su un
pendio perfettamente levigato e senza curve; di moto
traslatorio curvilineo la parabola di un proiettile, il
salto in sci.
In realtà movimenti veramente traslatori nell'uomo
sono estremamente rari, se non è trasportato da un
veicolo che a sua volta si muove di moto traslatorio
(automobile).
IL CORPO ESTESO RIGIDO
rotatorio
IL CORPO ESTESO RIGIDO
Nel moto rotatorio (o angolare) tutti i punti del
corpo in movimento si spostano su traiettorie
circolari i cui centri si trovano su una retta che si
chiama asse di rotazione.
Il senso della rotazione viene definito orario, se
uguale a quello delle lancette dell'orologio
(convenzionalmente negativo); antiorario se opposto.
IL CORPO ESTESO RIGIDO
Nel definire il senso del movimento occorre sempre
precisare la posizione dell'osservatore nei confronti
del corpo che si muove.
La ruota di una bicicletta che gira in senso orario per
chi la guarda da destra, gira in senso antiorario per
chi la vede da sinistra.
IL CORPO ESTESO RIGIDO
I punti che si trovano sull'asse di rotazione sono fissi.
I punti che non si trovano sull'asse hanno uguale
velocità angolare e uguale accelerazione angolare,
mentre la loro velocità tangenziale e la loro
accelerazione centripeta dipendono dalla loro distanza
dal centro, secondo le formule già note
IL CORPO ESTESO RIGIDO
roto-traslatorio
IL CORPO ESTESO RIGIDO
Nel moto roto-traslatorio il corpo è
simultaneamente dei due tipi di movimento.
dotato
Ne sono tipici esempi una palla da biliardo o un pallone da
calcio giocati con l'effetto, lo spostamento di una
bacchetta tirata per un'estremo con una corda in direzione
che non coincide con la sua lunghezza, e cosi via.
IL CORPO ESTESO RIGIDO
Vedremo come nei corpi articolati il movimento
traslatorio dell'estremo di una catena di segmenti o
anche dell'insieme del corpo è spesso la conseguenza
del moto rotatorio delle sue parti.
Il moto traslatorio dell'automobile risulta dal moto
(chiaramente rotatorio) delle sue ruote assecondate
dall'attrito;
IL CORPO ESTESO RIGIDO
il cammino dell'uomo è il prodotto dei movimenti
angolari dei segmenti dei suoi arti inferiori.
IL CORPO ESTESO RIGIDO
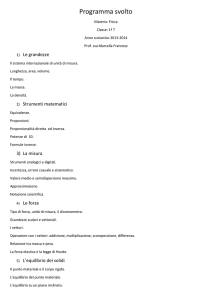
DIAGRAMMA “FREE BODY”
Con questo nome si indica la
rappresentazione grafica di un
corpo (o di una sua parte)
isolato da ciò che lo circonda,
che comprende tutte le forze
che su di esso agiscono.
IL CORPO ESTESO RIGIDO
DIAGRAMMA “FREE BODY”
E’ merito di Steindler e di
Dempster aver compreso
l'utilità di concepire il corpo
umano come un insieme di
unità funzionali che si
spostano una rispetto all'altra
nei movimenti e che sono
collegate come gli anelli di
una catena (in inglese link, in
francese chainon):
IL CORPO ESTESO RIGIDO
DIAGRAMMA “FREE BODY”
Il segmento di retta che
rappresenta il segmento
corporeo ne è l'asse meccanico.
Secondo Dempster, il segmento
di retta deve unire i centri
articolari prossimale e distale
del segmento corporeo.
IL CORPO ESTESO RIGIDO
La sua lunghezza pertanto può
differire , e in genere differisce,
da quella dell'osso che è posto a
sostegno del segmento corporeo.
Ad esempio è inferiore per
l'omero, perché gli assi di
rota z i o n e
passano
rispettivamente per il centro
della testa e per la troclea, e
quindi « all'interno » dell'osso.
IL CORPO ESTESO RIGIDO
Il tipo di moto cui un corpo è sottoposto è
naturalmente in rapporto con le caratteristiche delle
forze che su di esso agiscono (punto di applicazione,
direzione, verso e intensità).
L'esperienza insegna anzitutto che gli effetti di una
forza applicata ad un corpo esteso non variano se il suo
punto di applicazione viene spostato lungo la sua retta
d'azione: il moto di un carretto non si modifica a seconda
che il carretto venga tirato dall'asino o spinto dal
padrone, purché risultino uguali la direzione, il verso e
l'intensità della forza applicata.
IL CORPO ESTESO RIGIDO
I movimenti effettivamente
eseguiti dai segmenti ossei
- o ste o c i n e m at ica risultano da uno o più
movimenti «base » eseguiti
in successione o nel
contempo.
IL CORPO ESTESO RIGIDO
I movimenti « base » che un
osso può eseguire sono i
seguenti:
movimento rotatorio.
traslazione
senza alcuna componente rotatoria
(evenienza assai rara),
movimento angolare,
movimento rotatorio.
IL CORPO ESTESO RIGIDO
Gli ultimi due termini
vengono usati spesso
come sinonimi ma in
questa sede indicano due
m o d a lit à
diverse
espresse dai termini
inglesi di swing e spin.
IL CORPO ESTESO RIGIDO
Testo
IL CORPO ESTESO RIGIDO
Testo
IL CORPO ESTESO RIGIDO
Testo
IL CORPO ESTESO RIGIDO