11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
9
202
12:46
Pagina 202
capitolo
Reti
industriali
Presentazione:
- Esigenze e offerte esistenti
- Tecnologie
- Politica Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Sommario
21-11-2009
12:46
Pagina 203
9. Reti industriali
b 9.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 204
1
b 9.2 Storia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 204
b 9.3 Le esigenze e le risposte del mercato . . . . . . . . . . . . . . . . . . . pagina 205
b 9.4 Tecnologie delle reti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 207
b 9.5 Le reti consigliate da Schneider Electric . . . . . . . . . . . . . . . . . pagina 209
2
b 9.6 Ethernet TCP/IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 210
b 9.7 Servizi Web e Transparent Ready . . . . . . . . . . . . . . . . . . . . . . . pagina 213
b 9.8 Bus Can Open. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 220
3
b 9.9 Sinergia Ethernet e Can Open . . . . . . . . . . . . . . . . . . . . . . . . . pagina 228
b 9.10 Bus AS-Interface (AS-I) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 228
b 9.11 Conclusione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 235
4
5
6
7
8
9
10
11
12
M
Schneider Electric
203
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.1
9.2
12:46
Pagina 204
Introduzione
Storia
Questo capitolo affronta il tema delle tecniche di cablaggio necessarie
al funzionamento di un sistema di automazione.
Generalmente si considerano due categorie:
- I circuiti correnti forti che generalmente trasportano l’energia della rete e
che garantiscono quindi la connessione dei componenti di potenza dalla
rete di alimentazione fino al carico. Questo argomento non sarà trattato
in questo capitolo ma invitiamo il lettore a consultare i capitoli
sull’alimentazione e la messa in opera.
- I circuiti correnti deboli che collegano l’insieme dei componenti di
acquisizione, dialogo, elaborazione e comando potenza con la macchina
e il processo.
9.1
Introduzione
Tradizionalmente il cablaggio delle apparecchiature elettriche è garantito
da collegamenti filo a filo.
La norma internazionale macchine IEC 60 204-1 e quella delle installazioni.
proprie di ciascun Paese, definiscono regole precise sulle sezioni, sulla
qualità dell’isolante e sugli identificativi di riferimento con colori normalizzati.
La maggior parte di questi collegamenti sono realizzati mediante cavi
singoli flessibili di sezione compresa tra 1.5 e 2.5mm2 (AWG 16 e 14)
protetti alle estremità da terminali.
Queste soluzioni hanno soddisfatto, fino al precedente decennio, tutte le
esigenze, sia per i segnali ON/OFF che per i segnali analogici necessari agli
asservimenti che talvolta richiedono cablaggi schermati per evitare i disturbi
elettromagnetici.
L’ingresso delle tecnologie digitali nell’industria ha avuto un impatto
notevole sulla progettazione e sulla realizzazione delle apparecchiature
elettriche che ha subito l’influenza degli standard propri dal settore
informatico ed automobilistico.
Lo scambio di informazioni digitali ha imposto collegamenti con reti di
comunicazione che richiedono l’utilizzo di connettori e connessioni
precablati. Il lavoro di realizzazione di un apparecchiatura elettrica diventa
quindi molto più semplice: gli errori di cablaggio vengono ridotti e la
manutenzione semplificata.
Questo capitolo è dedicato alle reti di comunicazione utilizzate nell’industria
dal momento che le tecnologie dei collegamenti convenzionali sono ormai
ben conosciute.
9.2
Storia
Nel 1968 la società Modicon inventa il concetto di controllore
programmabile. Un unico prodotto risponde ad una grande moltiplicità di
esigenze e apporta un’economia di scala. La sua grande flessibilità
d’impiego garantisce notevoli guadagni in tutte le fasi di vita dell’impianto.
Anche le reti fanno la loro comparsa gradualmente, inizialmente sotto forma
di collegamenti seriali. Successivamente i protocolli di comunicazione, insiemi
di convenzioni e regole, formalizzano gli scambi di informazionmi sulla rete.
Nel 1979 Modbus (contrazione di MODicon BUS), diventa di fatto uno
standard industriale, continuando ancora oggi a permettere di comunicare
tra loro milioni di dispositivi di automazione.
Dopo alcuni anni si è verificata una rapida adozione del bus di campo.
Vera e propria spina dorsale dei sistemi di automazione il bus di campo si
delinea come un mezzo estremamente potente di scambi, di visibilità e di
flessibilità per le apparecchiature ad esso collegate, portando ad un
cambiamento progressivo delle architetture:
- eliminazione dei cavi d’ingressi/uscite,
- scomparsa o decentralizzazione delle interfacce d’I/O,
- decentralizzazione e ripartizione dell’intelligenza delle macchine,
- interconnessione con Internet.
204
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
9.2
9.3
12:46
Pagina 205
Storia
Le esigenze e le risposte del mercato
Gli anni ‘70 vedono la nascita della rete Ethernet nel Centro Ricerche Xerox
a Palo Alto (universalmente noto come PARC). Solo una decina di anni dopo
Ethernet diventa lo standard internazionale che tutti conosciamo, integrato di
base in quasi tutti i computer. Le prime applicazioni sono state di
trasferimento file e messaggi e di trasmissione di pagine WEB. Negli anni ‘90
l’affermazione dell’informatica in tutti i settori dell’impresa ha fatto nascere
l’esigenza di collegare tra loro i diversi settori industriali.
Il World Wilde Web inventato dal CERN nel 1989 fu sviluppato in origine
per consentire la condivisione di informazioni tra i diversi gruppi di lavoro
di ricercatori in ambito internazionale. Il mondo del WWW è un sistema di
condivisione ipertestuale mondiale di documenti e collegamenti.
Il protocollo HTTP è un protocollo semplice utilizzato da un navigatore
(browser) per accedere alle pagine web registrate su un server. Queste
pagine sono programmate con appositi linguaggi, quali HTML o XML.
Il World Wilde Web Consortium (W3C), creato nel 1994, gestice
l’evoluzione tecnica del web (vedere il sito http://www.w3.org/)
Nel 1996 Schneider Electric promuove la rete Ethernet industriale per
collegare i livelli “impresa” e “officina” con i controllori programmabili,
sviluppando la filosofia “Transparent Ready”. Questa soluzione semplice
si basa sull’aggiunta di strumenti e protocolli industriali, tra i quali
Modbus, agli elementi standard di Ethernet.
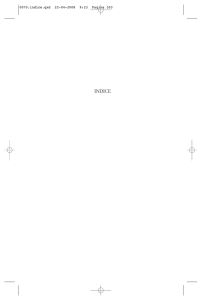
9.3
Le esigenze e le risposte del mercato
In base all’effetto congiunto delle esigenze e dei vincoli dell’utenza, delle
tecnologie e degli standard, le architetture attuali si strutturano in quattro
livelli distinti e collegati da reti (C Fig. 1).
9
A Fig. 1
Esempio di livelli di architettura
Schneider Electric
205
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
Reti industriali
12:46
9.3
Pagina 206
Le esigenze e le risposte del mercato
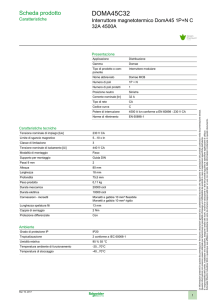
Prima di analizzare le tecnologie delle reti di comunicazione, è necessario
presentare una sintesi delle principali esigenze alle quali i diversi livelli
forniscono una risposta pertinente. Le caratteristiche riportate nella
tabella della Fig. 2 verranno trattate in dettaglio nei paragrafi seguenti.
Livello
Esigenze
Volume
Tempo
d’informazioni di risposta
da trasmettere
Distanza
Topologia
rete
Numero
d’indirizzi
Collegamento
Impresa
Scambio di dati.
File
Sicurezza informatica.
Mbit
Standard tra pacchetti applicativi.
1mn
Mondo
Bus, stella
Illimitato
Elettrico,
ottico, radio
Officina
Dati
Sincronizzazione dei PLC1 della
stessa isola di automazione
Kbit
scambi d’informazioni in modalità
client/server con gli strumenti
di gestione (HMI, supervisione).
da 50 a 500 ms da 2 a 40 Km Bus, stella
da 10 a 100
Elettrico,
ottico, radio
da 5 a 100 ms da 10 m a 1 Km Bus, stella
(ciclo del PLC)
da 10 a 100
Elettrico,
ottico, radio
da 10 a 50
Elettrico
radio
Prestazioni tempo reale.
Macchina
Architettura distribuita.
Data
Integrazione funzionale
Kbit
e transparenza degli scambi.
Topologia e costi di connessione.
Sensore
Semplificazione del cablaggio,
Dati
distribuzione delle alimentazioni bit
dei sensori e azionatori.
Ottimizzazione dei costi di cablaggio.
A Fig. 2
Le esigenze e i limiti di comunicazione
da 1 a 100 m Nessun
vincolo
Come primo approccio prendiamo in considerazione i due principali assi
della tabella sopra riportata:
- il numero d’informazioni da trasmettere,
- il tempo di risposta necessario.
Questo ci permette di posizionare le principali reti in commercio (C Fig.3).
A Fig. 3
206
Principali reti industriali
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
9.4
9.4
12:46
Pagina 207
Tecnologie delle reti
Tecnologie delle reti
Qui di seguito affronteremo l’argomento in modo conciso; per dettagli più
approfonditi fare riferimento alla ricca bibliografia sull’argomento.
b Topologia delle reti
Una rete di comunicazione industriale è costituita da controllori
programmabili, interfacce uomo/macchina, computer, moduli d’I/O
interconnessi da cavi elettrici, fibre ottiche, collegamenti radio o elementi
d’interfaccia quali schede rete o gateway. La disposizione fisica della rete,
cioè il modo in cui sono collegati fra loro i diversi nodi che la
compongono, è detta topologia fisica o architettura della rete.
Quando si considera la circolazione delle informazioni si usa il termine
topologia logica.
A Fig. 4
Topologia delle reti
Generalmente si distinguono le seguenti topologie:
- a bus (C Fig.4),
- a stella (C Fig.5),
- ad albero,
- ad anello,
- a maglia.
• Topologia bus
Questa organizzazione è una delle più semplici. Tutti gli elementi sono
direttamente collegati allo stesso mezzo trasmissivo lineare: il bus.
Si tratta di una topologia facile da realizzare e dove il guasto di un nodo o
di un elemento non disturba il funzionamento degli altri dispositivi collegati.
Le reti del livello macchina e sensori, detti bus di campo, utilizzano questa
topologia.
La topologia a bus si realizza collegando tra loro gli apparecchi in
concatenamento oppure utilizzando una morsettiera di collegamento
(TAP) al cavo principale (C Fig.4).
A Fig. 5
Topologia delle reti a stella
• Topologia a stella
La topologia a stella è oggi la più diffusa, ed è quella utilizzata da Ethernet.
Presenta il vantaggio di essere molto flessibile per gli interventi di gestione
e riparazione. Le stazioni sono connesse ad un nodo centrale che può
essere un semplice ripetitore (hub) o un dispositivo intelligente (switch o
router). Uno dei vantaggi è dato dal fatto che se vi è un’interruzione su
una delle connessioni della rete ne risentirà solo l’apparecchio collegato a
quel segmento mentre tutti gli altri contineranno ad operare normalmente.
• Altre topologie (C Fig.6)
- La topologia ad anello riprende la topologia fisica della stella ed
offre una maggiore disponibilità della rete.
- La topologia a maglia è poco utilizzata nell’industria e presenta
l’inconveniente di un numero elevato di collegamenti che aumenta in
base al numero di nodi (non adatta a reti medio-grandi).
Ad anello
A maglia
La topologia ad anello riprende la topo- La topologia a maglia è poco utilizzata
logia fisica della stella offrendo una mag- nell’industria e presenta l’inconveniente
gior disponibilità della rete.
di un numero elevato di collegamenti.
A Fig. 6
Altre topologie di reti
Schneider Electric
207
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.4
12:46
Pagina 208
Tecnologie delle reti
b Protocollo
Per protocollo di rete si intende un insieme di più regole che determinano
le modalità di funzionamento di un determinato sistema di comunicazione.
Inizialmente per protocollo si intendeva quello che veniva utilizzato per
comunicare sullo stesso livello tra due apparecchiature diverse. Per
estensione si utilizza talvolta questo termine ancora oggi per indicare le
regole di comunicazione tra due livelli su uno stesso apparecchio.
Il modello OSI (Open System Interconnexion) è stato creato
dall’International Standard Organization che ha curato l’edizione della
norma ISO 7498 con lo scopo di offrire una base comune alla descrizione
di qualsiasi rete informatica. Il modello OSI suddivide la rete in 7 livelli OSI
(o layers), numerati da 1 a 7. I livelli OSI si basano sui seguenti principi:
- ogni livello supporta un protocollo indipendentemente dagli altri livelli,
- ogni livello procura dei servizi al livello immediatamente superiore,
- ogni livello richiede i servizi del livello immediatamente inferiore,
- il livello 1 descrive il collegamento (il supporto di comunicazione),
- il livello 7 procura dei servizi all’utente o ad un’applicazione.
In fase di comunicazione, l’utente di una rete utilizza i servizi del livello 7
attraverso un programma. Il livello configura e arricchisce l’informazione
che riceve dal programma rispettando il suo protocollo. Poi la invia al
livello inferiore su una richiesta di servizio.
Ad ogni livello l’informazione subisce configurazioni ed aggiunte in
funzione dei protocolli utilizzati; infine viene trasmessa attraverso il mezzo
di connessione e ricevuta da un altro nodo della rete. L’informazione
percorre tutti i livelli di questo nodo in senso inverso per finire al
programma del corrispondente, spogliata delle diverse aggiunte legate ai
protocolli.
Il modello OSI a 7 livelli (C Fig.7) è stato implementato da diversi
costruttori, senza tuttavia riscuotere successo commerciale. Il mercato è
infatti fortemente orientato verso il modello a 4 livelli TCP/IP più facile da
comprendere e utilizzare e per il quale esistevano già implementazioni
portatili. Il modello conserva tuttavia un interesse teorico, benché i 4 livelli
del modello TCP/IP non abbiano gli esatti equivalenti nel modello OSI.
Nel paragrafo dedicato a Ethernet descriveremo i 4 livelli del modello OSI.
N°
Livello ISO
7
Applicazione È l’interfaccia con l’utente e fa pervenire le richieste al livello di presentazione.
HTTP, SMTP, POP3, FTP,
Modbus
6
Presentazione Definisce il modo in cui i dati saranno rappresentati. Converte i dati
per garantirne l’interpretazione da parte di tutti i sistemi.
HTML, XML
5
Sessione
Garantisce le comunicazioni e i corretti collegamenti tra i sistemi.
Definisce l’apertura delle sessioni sugli apparecchi della rete.
ISO8327, RPC, Netbios
4
Trasporto
Consente di stabilire una comunicazione da un’estremità all’altra.
Gestisce la segmentazione e il riassemblaggio dei dati, il controllo del flusso oltre al
rilevamento di errori e la ripresa in seguito ad errore.
TCP, UDP, RTP, SPX,
ATP
3
Rete
Si occupa dell’instradamento o routing dei pacchetti (datagrammi) attraverso la rete.
IP, ICMP, IPX, WDS
2
Collegamento Permette di stabilire, a partire dal supporto fisico, un collegamento esente da errori.
ARCnet , PPP, Ethernet,
Token ring
1
Fisico
CSMA, RS-232,
10Base-T, ADSL
A Fig. 7
208
Funzione del livello
Esempi
Definisce i protocolli di scambio di bit e gli aspetti elettrici, meccanici
e funzionali dell’accesso alla rete.
I livelli ISO
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
26-11-2009
9.4
9.5
10:16
Pagina 209
Tecnologie delle reti
Le reti consigliate da Schneider Electric
b Trama
La trama (C Fig.8) è l’insieme delle informazioni trasmesse in un unico
blocco attraverso la rete. Viene anche chiamata pacchetto. Ogni trama
rispetta la stessa organizzazione di base e contiene informazioni di
controllo, quali i caratteri di sincronizzazione, gli indirizzi delle stazioni, un
valore di controllo errore, oltre ad una quantità variabile di dati.
A Fig. 8
9.5
Composizione di una trama
Le reti consigliate da Schneider Electric
Allo scopo di rispondere a qualsiasi tipo di esigenza, razionalizzando al
contempo la propria offerta, Schneider Electric ha scelto tre reti di
comunicazione (C Fig.9) per realizzare le implementazioni presentate
nell’introduzione di questa guida.
9
A Fig. 9
I livelli di comunicazione presi in considerazione
da Schneider Electric
b Ethernet Modbus TCP
La grande diffusione di Ethernet nel settore delle imprese e su Internet ne ha
fatto uno standard di comunicazione fondamentale. Il suo utilizzo generalizzato ha permesso di ridurre i costi di connessione, aumentando le prestazioni,
l’affidabilità e le funzioni offerte. La sua rapidità non limita le applicazioni e la
sua architettura consente facili evoluzioni. I prodotti e i software restano
compatibili e in questo modo i sistemi hanno una durata ottimale nel tempo. Il
protocollo “Modbus”, protocollo standard largamente utilizzato nell’industria,
fornisce un livello applicazione semplice e poco oneroso.
Schneider Electric
209
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.5
9.6
12:46
Pagina 210
Le reti consigliate da Schneider Electric
Ethernet TCP/IP
b Can Open
Can Open è la versione industriale del bus CAN. Creato per il settore
automobilistico, questo protocollo di rete ha dimostrato la sua flessibilità e
disponibilità da oltre 10 anni in diverse applicazioni, quali le
apparecchiature mediche, i treni, gli ascensori oltre a diverse macchine e
installazioni. L’ampia diffusione di questa tecnologia ha confermato
Schneider Electric nella sua scelta.
b As-Interface
Le macchine moderne hanno una grande quantità di sensori e attuatori e
spesso notevoli vincoli in materia di sicurezza. AS-Interface è la rete per il
livello di campo (sensori/attuatori) conforme alle esigenze dei sistemi di
automazione e controllo industriali. Presenta il vantaggio di offrire un
collegamento rapido e un unico cavo per la trasmissione delle
informazioni e l’alimentazione.
9.6
Ethernet TCP/IP
b Descrizione generale
Il principio di accesso al mezzo fisico (cavo) di Ethernet si basa su un
meccanismo di rilevamento collisione. Ogni stazione viene identificata da
una chiave assegnata in modo univico, chiamata indirizzo MAC; questo
garantisce che tutte le postazioni su una rete Ethernet abbiano indirizzi
diversi tra loro. Questa tecnologia di accesso al mezzo trasmissivo,
conosciuta con il nome di Carrier Sense Multiple Access with Collision
Detection o CSMA/CD, garantisce che una sola stazione alla volta
trasmetta un messaggio sul bus.
Le successive evoluzioni di Ethernet hanno fatto nascere lo standard IEEE
802.3 (vedere il sito www.ieee.org): quest’ultimo definisce soltanto le
caratteristiche dei livelli fisici e il modo in cui le informazioni hanno accesso
alla rete (mentre la trame dati devono essere definite da livelli
complementari). La Fig. 10 specifica i diversi livelli. I protocolli indicati
vengono descritti nei paragrafi seguenti.
A Fig. 10
I diversi livelli
Ethernet è presente nell’industria da diversi anni senza tuttavia aver
riscosso un gran successo. Questo perchè era percepito come non
determinista sia dai fornitori che dai clienti. Le esigenze reali di questi
ultimi hanno fatto scemare l’interesse per questa tecnologia a vantaggio
delle reti proprietarie. Infine la combinazione di protocolli, industriali e
Internet, ha contribuito a farlo accettare.
210
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:46
Pagina 211
b Il livello fisico
Il livello fisico si occupa della spedizione delle trame sul mezzo
trasmissivo. A questo livello sono anche definite le caratteristiche fisiche
della comunicazione, quali le convenzioni sul tipo di collegamento
utilizzato per le comunicazioni (cavi, ìfibra ottica o radio), e tutti i dettagli
relativi come i connettori, i tipi di codifica o di modulazione, il livello dei
segnali, le lunghezze d’onda, la sincronizzazione e le distanze massime di
collegamento.
b Il livello collegamento dati (Datalink)
Il livello collegamento dati stabilisce il cammino di comunicazione più
affidabile possibile tra nodi della rete direttamente connessi tramite un
mezzo trasmissivo. Specifica il controllo di accesso al mezzo e le
modalità di trasmissione dei pacchetti sul livello fisico, in particolare la
sequenza (le sequenze di bit che segnano l’inizio e la fine dei pacchetti).
Le intestazioni delle trame Ethernet, ad esempio, contengono dei campi
che indicano a quale macchina della rete è destinato un dato pacchetto.
b Il livello rete (Network layer)
Nella sua definizione originale il livello rete risolve il problema
dell’instradamento o routing dei pacchetti attraverso una sola rete. Con
l’avvento della nozione d’interconnessione delle reti, a questo livello sono
state aggiunte delle funzioni e in particolare l’instradamento dei dati da
una rete sorgente ad una rete destinataria. Ciò implica generalmente il
routing dei pacchetti attraverso una rete di reti, conosciuta con il nome di
Internet.
Tra i protocolli Internet, IP assicura il miglior’instradamento o routing dei
pacchetti, per l’inoltro da una sorgente verso una destinazione, qualunque
sia la sua localizzazione nel mondo. Il routing IP è permesso grazie alla
definizione di un principio d’indirizzamento IP che garantisce e obbliga
l’unicità di ogni indirizzo IP. Ogni stazione è infatti identificata da un
proprio indirizzo IP. Il protocollo IP include anche altri protocolli, come
l’ICMP (utilizzato per trasferire dei messaggi di diagnostica legati alle
trasmissioni IP) e l’IGMP (utilizzato per gestire i dati multicast). ICMP e
IGMP sono situati sopra IP, ma partecipano alle funzioni del livello rete,
cosa che spiega l’incompatibilità tra i modelli Internet e OSI.
Il livello rete IP può trasferire dei dati per numerosi protocolli di livello superiore.
9
b Il livello trasporto
I protocolli di livello trasporto possono risolvere problemi come l’affidabilità
degli scambi («I dati sono arrivati a destinazione?»), l’adattamento
automatico alla capacità delle reti utilizzate e il controllo di flusso.
Garantisce inoltre che i dati arrivino nell’ordine corretto. Tra i protocolli
TCP/IP quello di trasporto determina anche a quale applicazione ciascun
pacchetto dati deve essere consegnato.
TCP (Trasmission Contro Protocol) è un protocollo di trasporto, progettato
per fornire un flusso di byte affidabili e orientato alla connessione.
Assicura l’arrivo dei dati senza alterazione e nell’ordine corretto, con
ritrasmissione in caso di perdita, ed eliminazione dei dati duplicati.
Gestisce inoltre i dati «urgenti» (pushed data) da consegnare senza
aspettare (anche se tecnicamente non sono emessi fuori banda).
TCP prova a fornire tutti i dati correttamente e in sequenza; questo è il
suo scopo e principale vantaggio su UDP, anche se questo può
rappresentare uno svantaggio per applicazioni di trasferimento in tempo
reale, con tassi di perdita elevati per il livello rete.
UDP (User Data Protocol) è un protocollo che fornisce un flusso di byte
non affidabile e non connesso, utile per inviare dati senza connessione
(client- server). Questo non significa che UDP sia particolarmente poco
affidabile, ma solo che non verifica l’arrivo a destinazione dei pacchetti e il
Schneider Electric
211
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.6
12:46
Pagina 212
Ethernet TCP/IP
loro arrivo nell’ordine corretto. Un’applicazione che abbia bisogno di
queste garanzie, deve assicurarle lei stessa, oppure utilizzare TCP.
UDP viene generalmente utilizzato da applicazioni di diffusione, quali
Global Data o le applicazioni multimediali (audio e video, ecc...) per le
quali il tempo richiesto da TCP per gestire le ritrasmissioni e la
programmazione dei pacchetti non è disponibile, o per applicazioni basate
su meccanismi semplici di domanda/risposta come le richieste SNMP, per
le quali il sovracosto legato alla realizzazione di una connessione affidabile
sarebbe sproporzionato rispetto all’esigenza.
Sia TCP che UDP sono utilizzati da molte applicazioni; il numero di porta
indica se utilizzano TCP o UDP.
Modbus TCP utilizza i servizi TCP.
Factorycast permette di utilizzare UDP.
b Il livello applicazione
È nel livello applicazione che sono situate la maggior parte delle
applicazioni di rete tra le quali:
HTTP (World Wilde Web), FTP (trasferimento di file), SMTP (messaggeria),
SSH (connessione a distanza protetta), DNS (ricerca di corrispondenza tra
nomi e indirizzi IP) e molte altre.
Le applicazioni funzionano generalmente su TCP o UDP, e sono spesso
associate ad una porta ben definita. Esempi:
- HTTP porta TCP 80 o 8080,
- Modbus porta 502,
- SMTP porta 25,
- FTP porta 20/21.
Le porte sono state assegnate dall’Internet Assigned Numbers Authority.
v Il protocollo HTTP (HyperText Transfer Protocol)
È il protocollo utilizzato per trasmettere pagine Web tra un server e un
browser. HTTP è il protocollo del livello applicazione per il Web dal 1990.
I Web server caricati sui prodotti Transparent Ready permettono un
accesso facilitato ai prodotti situati ovunque nel mondo da un semplice
web browser come Internet Explorer, Netscape Navigator o altri.
v BOOTP/DHCP
È utilizzato per fornire automaticamente gli indirizzi IP ai prodotti.
In questo modo si evita di dover gestire individualmente gli indirizzi di
ogni singolo prodotto riportando la gestione ad un server dedicato di
assegnazione indirizzi IP.
Il protocollo DHCP (Dynamic Host Configuration Protocol) assegna
automaticamente i parametri di configurazione ai prodotti. DHCP è
un’estensione di BOOTP.
I componenti del protocollo BOOTP/DHCP sono 2:
- il server che il calcolatore che fornisce l’indirizzo IP,
- il client che richiede l’indirizzo IP.
I prodotti Schneider Electric possono essere:
- client BOOTP/DHCP che permettono di recuperare automaticamente
l’indirizzo IP proveniente da un server,
- server BOOTP/DHCP che permettono al prodotto di assegnare gli
indirizzi IP alle stazioni della rete.
Questi protocolli standard BOOTP/DHCP consentono di offrire il servizio
di sostituzione di prodotti guasti (FDR, Faulty Device Replacement).
212
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
9.6
9.7
12:46
Pagina 213
Ethernet TCP/IP
Servizi Web e Transparent Ready
v File Transfer Protocol (FTP)
FTP o Protocollo di trasferimento file è il servizio che fornisce gli elementi
fondamentali per il trasferimento dei file. Fornisce gli elementi base di
trasferimento di file. FTP viene utilizzato da molti sistemi per la
condivisione di file tra host.
v TFTP: Trivial File Transfer Protocol
È un protocollo semplificato di trasferimento file che consente inoltre di
telecaricare il codice ad un prodotto. Consente ad esempio di trasferire il
codice di avviamento (boot code) da una stazione di lavoro senza unità
disco o di collegarsi e telecaricare degli aggiornamenti di firmware di
prodotti della rete. I prodotti Transparent Ready implementano FTP e
TFTP per trasferire alcune informazioni tra i prodotti.
v NTP (Network Time Protocol)
NTP è un protocollo utilizzato per sincronizzare gli orologi e quindi l’ora di
un prodotto (client o server) a partire da un server fornitore. In base alla
rete utilizzata, fornisce a partire dall’ora universale (UTC), una precisione
che va da qualche millisecondo su una rete locale (LAN) a più decine di
millisecondi su una rete estesa (WAN).
v SMTP (Simple Mail Transfert Protocol)
Fornisce un servizio di trasmissione E-mail. Permette l’invio di E-mail tra
un mittente e un destinatario attraverso un server SMTP.
v SNMP (Simple network management protocol)
La comunità Internet ha sviluppato questo standard per consentire la
gestione dei diversi componenti di una rete attraverso un sistema unico.
Il sistema di gestione della rete può scambiare delle informazioni con i
prodotti agenti SNMP. Questa funzione consente al gestore di visualizzare
lo stato della rete e dei prodotti, di modificare la loro configurazione
e di controllare gli allarmi in caso di guasto. I prodotti Transparent Ready
sono compatibili SNMP e possono essere integrati naturalmente in una
rete amministrata via SNMP.
v COM/DCOM (Distributed Component Object Model) ou OLE
(Object Linking and Embedding).
Si tratta delle tecnologie che consentono una comunicazione trasparente
tra le applicazioni Windows. Vengono utilizzate nel software data server
OFS (OLE for Process Control Factory Server).
9.7
Servizi Web e Transparent Ready
Come detto precedentemente i servizi universali non consentono un
utilizzo industriale. I costruttori di componenti hanno quindi completato i
servizi universali di Internet con funzioni specifiche ai sistemi di
automazione e controllo.
Schneider Electric ha sviluppato un’offerta di prodotti specifici che offrono
una comunicazione “trasparente” tra tutti i livelli precedentemente illustrati
il WEB. Schneider Electric ha investito molto sull’integrazione delle
tecnologie web2 nei suoi prodotti e servizi. La sua offerta si fonda su due
pilastri:
- La rete Ethernet industriale.
- I componenti WEB.
Lo scopo è di offrire dei “Servizi”, funzioni che consentono al Cliente di
eseguire delle task particolari, come inviare un’informazione da un
controllore programmabile ad un altro o attivare un allarme.
2
Il termine "tecnologia web" è sinonimo di "tecnologia Internet" e riguarda: i
protocolli internet, i linguaggi di programmazione quali Java, html, xml, ecc... oltre
agli strumenti che hanno rivoluzionato il modo di condividere le informazioni.
Schneider Electric
213
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.7
12:47
Pagina 214
Servizi Web e Transparent Ready
b Ethernet industriale
Oltre ai protocolli Ethernet universali (HTTP, BOOTP/DHCP, FTP, ecc...),
i prodotti Schneider Electric sono in grado di fornire otto tipi di servizi di
comunicazione:
- Servizio di messaggeria Modbus TCP.
- Servizio di scambio ingressi/uscite distribuiti: I/O Scanning.
- Servizio di sostituzione apparecchio guasto: FDR (Faulty Device
Replacement).
- Servizio di amministrazione rete: Agent SNMP.
- Servizio di distributione dati globale: Global Data.
- Servizio di gestione della banda passante.
- Servizio di sincronizzazione dell’ora: NTP.
- Servizio di notifica eventi SMTP (E-mail).
La Fig. 11 mostra il posizionamento di questi servizi rispetto ai diversi
livelli delle reti.
A Fig. 11
Servizi e reti
I servizi di comunicazione sono raggruppati in tre classi:
- Classe 10: servizi base di comunicazione Ethernet.
- Classe 20: servizi di gestione comunicazione Ethernet (livello rete e
livello prodotto).
- Classe 30: servizi avanzati di comunicazione Ethernet.
La tabella della Fig. 12 descrive i diversi servizi:
A Fig. 12
I servizi di comunicazione Ethernet
b Servizio di messaggeria: Ethernet Modbus TCP
Modbus è il protocollo di trasmissione dati, standard di fatto dal 1979,
ampiamente utilizzato nell’industria. Modbus TCP/IP altro non è che la
trasposizione del protocollo bus su rete Ethernet, implementato
utilizzando il protocollo Modbus TCP.
Si tratta di un protocollo ormai collaudato, disponibile per tutte le
apparecchiature in commercio, che non richiede componenti proprietari
né acquisto di alcuna licenza.
Le specifiche sono disponibili gratuitamente sul sito www.modbus-ida.org.
214
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 215
La sua semplicità consente a qualunque dispositivo di campo, quale ad
esempio un modulo d’ingressi/uscite, di comunicare su Ethernet senza
bisogno di un potente microprocessore o di molta memoria.
Grazie alla notevole portata di Ethernet (100 Mbit/s), le prestazioni di
Ethernet Modbus TCP sono eccellenti e lo rendono adatto per le
applicazioni in tempo reale, quali l’elaborazione d’ingressi/uscite.
Il protocollo applicazione è identico su Modbus seriale, Modbus Plus o
Ethernet Modbus TC; questo permette di smistare i messaggi da una rete
all’altra senza bisogno di conversione di protocollo.
Con Modbus TCP/IP è disponibile la funzione di routing IP che permette a
prodotti situati ovunque nel mondo di comunicare senza limiti di distanza.
L’organizzazione IANA (Internet Assigned Numbers Authority) ha riservato a
Ethernet Modbus TC, la porta TCP 502. In questo modo Modbus è diventato
un protocollo standard di Internet. La dimensione massima dei dati è di 125
parole o registri in lettura e di 100 parole o registri in scrittura.
b Servizio di scambio d’ingressi/uscite distribuiti:
I/O Scanning
Questo servizio consente di gestire lo scambio di stati tra ingressi/uscite
distribuiti su rete Ethernet. Con una semplice configurazione e senza una
programmazione specifica, gli ingressi/uscite vengono elaborati in modo
trasparente attraverso richieste di lettura/scrittura secondo il protocollo
client/server Ethernet Modbus TCP.
Questo principio di elaborazione attraverso un protocollo standard
consente di comunicare con qualsiasi prodotto che supporti Ethernet
Modbus TCP.
Questo servizio consente di definire due zone di parole, una riservata alla
lettura degli ingressi, l’altra alla scrittura delle uscite (C Fig.13).
I periodi di refresh sono indipendenti dal ciclo controllore.
9
A Fig. 13
Servizio di scambio d’ingressi/uscite distanti
In funzionamento, il modulo garantisce:
- La gestione delle connessioni TCP/IP con tutti i componenti a distanza.
- L’elaborazione dei prodotti e la ricopiatura degli ingressi/uscite nella
zona di parole configurata.
- Il controllo delle parole di stato che consente di verificare il corretto
funzionamento del servizio direttamente dall’applicazione controllore.
- L’applicazione di valori di ripristino preconfigurati in caso di problemi
di comunicazione.
Schneider Electric
215
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.7
12:47
Pagina 216
Servizi Web e Transparent Ready
Sul sito Web Modbus-IDA (www.modbus-ida.org) è possibile consultare
l’offerta di prodotti hardware e software che implementano il protocollo
I/O Scanning su qualsiasi tipo di prodotto collegabile alla rete Ethernet
Modbus TCP.
b Servizio di sostituzione apparecchio guasto:
FDR (Faulty Device Replacement
Il servizio di sostituzione di un prodotto guasto utilizza la tecnologia
standard di gestione indirizzo (BOOTP, DHCP) e il servizio di gestione file
FTP o TFTP (Trivial File Transfer Protocol) facilitando la manutenzione
delle apparecchiature collegate su Ethernet Modbus TCP.
Questo servizio consente di sostituire un prodotto guasto con un prodotto
nuovo garantendone la localizzazione, la riconfigurazione e il riavviamento
automatico mediante il sistema. Le fasi principali sono le seguenti:
- Un prodotto con servizio FDR integrato si guasta.
- Un prodotto simile preconfigurato con il nome identificativo (Device
name) dell’apparecchio guasto viene reinstallato sulla rete. A seconda
dei prodotti l’indirizzamento può essere effettuato con appositi
selettori o switch (I/O distribuiti Advantys STB, o Advantys OTB) o
mediante la tastiera integrata al prodotto (variatori di velocità Altivar 71).
- Il server FDR rileva il nuovo prodotto, a cui attribuisce un indirizzo IP e
a cui trasferisce i parametri di configurazione.
- Il prodotto sostituito verifica che i parametri siano perfettamente
compatibili con le sue caratteristiche ed entra in funzione.
b Servizio di amministrazione rete: SNMP
Il protocollo SNMP (Simple Network Management Protocol) consente, a
partire da una stazione Agent di rete, di controllare tutti i componenti
dell’architettura Ethernet e di garantirne quindi la diagnostica rapida in
caso di problemi. Questo servizio consente:
- D’interrogare i componenti della rete, quali le stazioni PC, i router, i
commutatori, i bridge o i prodotti terminali per visualizzarne lo stato.
- Di ottenere statistiche dalla rete alla quale sono collegati i prodotti.
Questo software agent di rete rispetta il modello tradizionale client/server.
Per evitare tuttavia la confusione con gli altri protocolli di comunicazione
che utilizzano questa terminologia, si parla piuttosto di gestore di rete o di
Agent SNMP.
I prodotti Transparent Ready possono essere gestiti da qualunque
gestore di rete SNMP, tra i quali HP Openview o IBM Netview e
naturalmente da ConnexView. Il protocollo standard SNMP (Simple
Network Management Protocol) consente l’accesso agli oggetti di
configurazione e gestione contenuti nelle librerie MIB (Management
Information Base) dei prodotti. Le libvrerie MIB devono rispettare alcuni
standard per essere accessibili da tutti i prodotti in commercio, ma in
base alla complessità dei prodotti, i costruttori possono ampliare il
database MIB personalizzato. La libreria MIB Transparent Ready contiene
oggetti di gestione specifici ai servizi di comunicazione Transparent
Ready quali Modbus, Global data, FDR, ecc... Questi oggetti facilitano
l’installazione, la messa in opera e la manutenzione dei prodotti.
216
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 217
I prodotti Transparent Ready supportano 2 livelli di gestione rete SNMP:
- L’interfaccia MIB II Standard che permette di accedere ad un primo
livello di gestione della rete. Il gestore pitrà identificare i prodotti che
costituiscono l’architettura e recuperare informazioni generali sulla
configurazione e sul funzionamento delle interfacce Ethernet TCP/IP.
- L’interfaccia MIB Transparent Ready che permette di migliorare la
gestione dei prodotti Transparent Ready. Presenta un insieme di
informazioni che consentono al sistema di gestione della rete di
supervisionare tutti i servizi Transparent Ready. Può essere scaricata
dal server FTP di qualsiasi modulo Ethernet Transparent Ready di un
controllore programmabile.
b Servizio di distribuzione dati Globali:
Global Data (C Fig.14)
Il servizio Global Data garantisce la distribuzione in multicast di dati
in tempo reale tra stazioni appartenenti ad uno stesso gruppo di
distribuzione. Consente di sincronizzare applicazioni a distanza o di
condividere un database comune tra più applicazioni distribuite.
Gli scambi si basano su un protocollo standard di tipo
Pubblicazione/sottoscrizione che garantisce prestazioni ottimali con un
carico minimo sulla rete.
Il protocollo RTPS (Real Time Publisher Subscriber) promosso da
Modbus-IDA (Interface for Distributed Automation) è già uno standard
adottato da diversi costruttori; 64 stazioni possono partecipare agli
scambi attraverso Global Data all’interno di uno stesso gruppo di
distribuzione. Ogni stazione può:
- pubblicare una variabile di 1024 byte. Il periodo di pubblicazione è
configurabile da 1 a n periodi della task master del controllore,
- sottoscrivere da 1 a 64 variabili.
La validità di ogni variabile è controllata da bit di stato (Health Status bits)
legati ad un timeout di refresh, configurabile tra 50 ms e 1 s.
L’accesso ad un elemento di variabile non è possibile.
La dimensione totale delle variabili sottoscritte raggiunge i 4 K byte
contigui. Per ottimizzare ulteriormente le prestazioni della rete Ethernet, i
Global Data possono essere configurati con l’opzione “multicast filtering”
che attraverso gli switch della gamma ConneXium garantisce la diffusione
dei dati solo sulle porte Ethernet alle quali è collegata una stazione
abbonata al servizio Global Data. Se gli “switch” non vengono utilizzati, i
Global Data vengono emessi in “multicast” su tutte le porte dello
“switch”.
A Fig. 14
Global Data
Schneider Electric
217
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.7
12:47
Pagina 218
Servizi Web e Transparent Ready
b Servizio NTP di sincronizzazione dell’ora
Il servizio di sincronizzazione dell’ora si basa sul protocollo NTP (Network
Time Protocol). Consente di sincronizzare l’ora di una stazione client o
server su Ethernet TCP/IP a partire da un server NTP o da un’altra fonte
di riferimento (radio, satellite, ecc...).
I moduli di comunicazione Ethernet Modbus TCP: 140 NOE 771 11 dei
controllori Modicon Quantum Unity V2.0 (o successiva) e TSX ETY 5103
dei controllori Modicon Premium Unity V2.0 (o successiva) dispongono di
un componente client NTP. Questi moduli sono in grado di collegarsi ad
un server NTP utilizzando una richiesta client (unicast), per aggiornare la
propria ora locale. L’orologio del modulo viene aggiornato periodicamente
(da 1 a 120 secondi) con un errore inferiore a 10 ms per i processori
comuni e inferiore a 5 ms per i processori ad elevate prestazioni. Se il
server NTP non è raggiungibile il modulo Ethernet Modbus TCP si rivolge
ad un server NTP di emergenza (standby).
b Servizio SMTP di notifica mediante e-mail
Il servizio SMTP di notifica mediante e-mail è programmabile.
Consente all’applicazione controllore di segnalare un evento al verificarsi
di determinate condizioni. Il controllore programmabile crea un messaggio
e-mail automaticamente e in modo dinamico, per avvisare un destinatario
definito, collegato alla rete in locale o a distanza.
L’e-mail può contenere variabili, allarmi e/o eventi. È importante ricordare
che questo servizio è disponibile con gli ultimi moduli di comunicazione
Ethernet per controllori programmabili Modicon Premium e Modicon
Quantum, oltre che con gli ultimi processori con collegamento Ethernet
degli stessi controllori, utilizzati con il software Unity Pro. Un servizio più
completo e indipendente dall’applicazione controllore è disponibile con il
modulo server Web attivo FactoryCast HMI.
Il servizio utilizza un meccanismo semplice ed efficace: intestazioni
predefinite di messaggi sono collegate al corpo dell’e-mail, a sua volta
creato dinamicamente a partire dalle ultime informazioni dell’applicazione
controllore. Al verificarsi di condizioni predeterminate, l’applicazione
controllore prepara il messaggio. Attraverso un blocco funzione viene
selezionata una delle 3 intestazioni predefinite e quindi creato un
messaggio e-mail contenente delle variabili e del testo (fino a 240 byte)
che viene quindi inviato direttamente dal controllore programmabile.
Ciascuna delle tre intestazioni contiene i seguenti elementi predefiniti:
- La lista dei destinatari del messaggio e-mail.
- Il nome del mittente e oggetto del messaggio.
Queste informazioni vengono definite e aggiornate da un amministratore
autorizzato che utilizza le pagine Web di configurazione.
b I servizi Web (C Fig.15)
Il livello di servizio di un server Web è definito da 4 classi di servizi
identificate con una lettera:
v Classe A
Definisce le apparecchiature Transparent ready senza servizi WEB.
v Classe B
È il livello web di base. Fornisce la possibilità di gestire pagine WEB
statiche preconfigurate in un’apparecchiatura Transparent Ready.
Consente di offrire servizi di diagnostica e controllo apparecchiatura a
partire da un WEB browser standard.
218
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 219
v Classe C
È il livello Web configurabile. Consente la personalizzazione del sito WEB
di un’apparecchiatura Transparent Ready con pagine WEB definite
dall’utente in funzione delle proprie esigenze applicative specifiche.
Di conseguenza la diagnostica e il controllo del processo client può
essere effettuato a partire da un WEB browser standard.
L’offerta Factory Cast fornisce questo livello di funzione Web e
comprende anche gli strumenti per facilitare la gestione e la modifica dei
siti WEB integrati.
v Classe D
È il livello Web attivo. Consente di realizzare l’elaborazione specifica
direttamente nell’apparecchiatura Transparent Ready server WEB.
Questa capacità di elaborazione consente di effettuare dei pre-calcoli,
di gestire un database tempo reale, di comunicare con database
relazionali e di inviare e-mail. Tutto questo permette di ridurre ed
ottimizzare la comunicazione tra il navigatore e il server.
L’offerta Factory Cast HMI fornisce questo livello di funzione Web e
comprende anche gli strumenti per la configurazione delle elaborazioni
da effettuare nell’apparecchiatura server Web.
9
A Fig. 15
I servizi web
v I prodotti Transparent Ready
Si identificano con una lettera che definisce il livello di servizi Web,
seguita da un numero che definisce il livello di servizio di comunicazione
Ethernet. Ad esempio:
- Il prodotto di classe A10 corrisponde ad un prodotto senza servizio
Web e con i servizi di base Ethernet.
- Il prodotto di classe C30 corrisponde ad un prodotto che dispone di
un server Web configurabile e dei servizi avanzati di comunicazione
Ethernet.
Schneider Electric
219
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.7
9.8
12:47
Pagina 220
Servizi Web e Transparent Ready
Bus Can Open
I servizi offerti da una classe superiore comnprendono naturalmente tutti i
servizi supportati da una classe inferiore. I prodotti Transparent Ready si
suddividono in 4 grandi gruppi:
- Componenti di campo (semplici o intelligenti) tipo sensori e attuatori.
- Controllori e controllori programmabili.
- Applicazioni HMI (Interfaccia Uomo/Macchina).
- Gateway e server dedicati.
La tabella della Fig. 16 consente di scegliere i prodotti Transparent Ready
in funzione delle classi di servizio desiderate.
Archiviazione dati locale
o database
Server Web attivo
Classe D (1)
Notifica E-mail / SMS
Funzioni HMI
Pagine Web utente
Server Web configurabile
Classe C (1)
Visualizzazione di
dati grafici
Diagnostica applicazione
Lettura/scrittura variabili
Server Web di base
Classe B (1)
Diagnostica prodotti
Configurazione prodotti
A Fig. 16
9.8
La scelta dei prodotti Transparent Ready
Bus Can Open
b Descrizione generale
Il bus CAN (Controller Area Network) è un bus sistema seriale sviluppato
da Bosch per il settore automobilistico. Venne presentato con Intel nel
1985 con l’obbiettivo di ridurre la quantità di cavi all’interno dei veicoli
(fino a 2 Km di cavi per veicolo) facendo comunicare i diversi dispositivi
di comando su un unico bus e non più su linee dedicate, dal momento
che lo scopo era di ridurre il peso dei veicoli.
L’elevata immunità ai disturbi elettromeccanici unita all’affidabilità della
trasmissione in tempo reale ha suscitato l’interesse delle industrie.
Nel 1991 nasce il consorzio CIA (= CAN in Automation) con l’obbiettivo
di promuovere l’applicazione CAN nell’industria (vedere il sito:
http://www.can-cia.de/).
Nel 1993 il consorzio CIA pubblica le specifiche CAL (CAN Application
Layer) che descrivono i meccanismi di trasmissione senza tuttavia
precisare quando e come utilizzarli. Nel 1995, il consorzio CiA pubblica il
profilo di comunicazione CANopen base DS-301.
La Fig. 17 mostra i diversi standard che definiscono protocolli di livello 7
(definiti nello standard CAN):
- Can Open.
- DeviceNet.
- CAL.
- SDS.
- CAN Kingdom.
220
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 221
Nel 2001 la pubblicazione da parte del CIA del profilo DS-304 permette
infine di integrare su un bus Can Open standard (CANsafe) componenti di
sicurezza di livello 4.
La Fig. 17 mostra le caratteristiche tecniche di Can Open.
Profilo Device Profilo Device
CiA DS-402
CiA DS-401
Drive
Moduli I/O
7
6
APPLICAZIONE
Non implementato
Non implementato
Non implementato
TRASPORTO
3
2
CAL = Livello Applicazione CAN
SESSIONE
4
Non implementato
RETE
COLLEGAMENTO
CAN 2.0 A e B + ISO 11898
FISICO
CAN 2.0 A e B + ISO 11898
ISO 11898 + DS-102 + DRP-301-1
1
A Fig. 17
Profilo
Device
CiA DS-4xx
CiA DS-301 = Profilo Comunicazione
PRESENTAZIONE
5
Profilo Device
CiA DS-404
Dispositivi
di misura
Specifiche
CAN
I livelli del bus CAN
b I vantaggi di Can Open
v Can Open utilizza trame corte
Grazie alla sua elevata immunità ai disturbi elettromagnetici (EMI)
Can Open consente alla macchina o all’installazione di effettuare un
lavoro preciso, anche in un ambiente fortemente perturbato.
Le trame corte Can Open e il collegamento “CANground” offrono le
stesse possibilità ad ogni apparecchio collegato alla rete garantendo la
protezione contro i disturbi elettetromagnetici.
v Can Open garantisce affidabilità di trasmissione
Quando un apparecchio Can Open trasmette i dati il sistema genera ed
elabora automaticamente la priorità del messaggio. È impossibile
perdere un telegramma per problemi di collisione o perdere tempo
aspettando il prossimo dato non attivo (idle) della rete.
Can Open consente una notevole affidabilità nella trasmissione di dati:
questo è uno dei motivi per cui Can Open viene ampiamente utilizzato
nelle apparecchiature mediche che richiedono reti affidabili.
v Can Open elimina le perdite di tempo
Le perdite di tempo sono sempre sinonimo di sprechi in tempo e denaro.
CANopen è stato progettato per ridurre al massimo le perdite di tempo.
Il meccanismo di controllo degli errori di Can Open garantisce una
distanza di Hamming pari a 6, offrendo un ottimo livello di rilevamento
errori e di correzione. Con una probabilità di un errore non rilevato in
1000 anni3 Can Open è la più affidabile delle reti per macchine e
installazioni.
3
1 bit di errore ogni 0.7 s a 500 Kbit/s, 8 h al giorno, 365 giorni all’anno
Nel caso in cui la rete rilevi una condizione di errore, il watch-dog
è la prima possibilità di controllo dello stato dell’apparecchiatura.
Ogni messaggio di diagnostica contiene l’origine e il motivo dell’errore
per consentire un intervento rapido riducendo le perdite di tempo.
Per migliorare la diagnostica delle apparecchiature Can Open complesse
e per tenere sotto controllo la rete è disponibile una diagnostica
supplementare.
Inoltre, per aiutare a rilevare gli errori aleatori, è disponibile una funzione
di report cronologico degli errori.
Schneider Electric
221
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
Reti industriali
9.8
12:47
Pagina 222
Bus Can Open
v Can Open: Prestazioni e flessibilità
Il motivo principale che porta a scegliere una rete sono le sue prestazioni e la
sua capacità di adattarsi esattamente alle caratteristiche dell’applicazione.
Can Open fornisce un dispositivo unico per l’adattamento della trasmissione
di dati. Basato sul modello produttore/consumatore, Can Open consente
trasmissioni in diffusione generale, punto a punto, cambiamento di stato e
ciclico. I dati vengono trasmessi solo se necessario, o in funzione di una
base tempi specifica. Gli oggetti dati di processo (PDO) possono essere configurati singolarmente. È possibile cambiare i parametri in qualsiasi momento.
• A proposito di prestazioni
Benché Can Open sia molto flessibile, la risposta della rete è rapida.
In meno di 1 ms possono essere elaborati 256 punti d’I/O digitali a 1 Mbit/s4.
Profibus-DP richiede circa 2 ms a 12Mbit/s per lo stesso tipo di scambio
di dati. Oltre alla risposta rapida è possibile cambiare il controllo delle
priorità dei messaggi. Can Open permette di adattare la trasmissione dei
dati alle caratteristiche specifiche dell’applicazione.
4
Source: Grid Control
v Can Open è sinonimo di riduzione dei costi
Can Open unisce facilità d’installazione e apparecchiature a basso costo.
A differenza di molti bus di campo Can Open non richiede un collegamento
equipotenziale tra gli apparecchi. Una connessione non corretta non genera
solo errori di comunicazione, ma può anche causare danni agli apparecchi sul bus.
I componenti per Can Open vengono prodotti su grande scala con
conseguente riduzione del prezzo. Schneider Electric offre ai suoi Clienti
tutti questi vantaggi in termini di riduzione dei costi.
Con Can Open è possibile ottenere una riduzione pari al 10-20 % del
prezzo rispetto agli altri bus di campo.
b Presentazione del funzionamento di CAN
CAN è un bus di comunicazione seriale per applicazioni di controllo in
tempo reale, basato su un modello pubblicazione-sottoscrizione.
Un nodo trasmittente o editor invia un messaggio ad altri nodi riceventi.
CAN è basato sul meccanismo di trasmissione diffusa (broadcast) che
utilizza un protocollo di trasmissione orientato al messaggio.
A Fig. 18
Il contenuto del messaggio è contrassegnato da un identificatore univoco
per tutta la rete. I nodi destinatari filtrano i messaggi del bus in base ai
criteri d’invio verificando se il messaggio è di propria pertinenza.
Se il messaggio è pertinente viene elaborato, altrimenti viene ignorato. Il
destinatario diventa quindi a sua volta un mittente (C Fig.18).
Il funzionamento di CAN
Lo schema della Fig. 18 ci mostra la modalità di invio (push) del modello
pubblicazione-sottoscrizione. CAN può anche supportare la modalità di
ricezione(pull) del modello pubblicazione-sottoscrizione. Un client può
inviare un messaggio a partire da una richiesta di trasmissione a distanza.
La richiesta di trasmissione a distanza (RTR “Remote Trasmissione
Requesf”) è una trama CAN che comporta le “flags” (bit di stato) RTR.
Quando il produttore riceve una richiesta di questo tipo trasmette la
relativa risposta (C Fig.19).
conferma
A Fig. 19
222
I modi « push » e « pull » del modello
pubblicazione-sottoscrizione
In un’architettura “broadcast”, i diversi nodi della rete possono trasmettere
contemporaneamente. CAN risolve il problema con 2 meccanismi. In
primo luogo un mittente controlla il bus per verificare l’eventuale presenza
di un’altro nodo già in trasmissione. Se il bus di comunicazione è libero, il
nodo comincia ad emettere. Più nodi possono cominciare ad emettere,
ma mai contemporaneamente; una tecnica di aggiuducazione non
distruttiva garantisce che i messaggi vengano trasmessi in ordine di
priorità e che nessuno di essi vada perso.
Il problema viene risolto con uno schema di priorità.
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 223
Una trama CAN (C Fig.20) inizia con un campo di inizio sequenza (SOT
“Start Of Trame”). Seguono undici bit di identificazione, dal più significativo
al meno significativo. Il bit seguente è il bit di richiesta trasmissione remota,
seguito da 5 bit di controllo e fino a 8 byte di dati utili. I bit di controllo
sono: l’ID esteso (IDE), un bit riservato e 3 bit del codice di lunghezza in
byte dei dati utili della parte dati (DLC). I dati utili sono seguiti da una
sequenza di verifica della trama (FCS “Frame Check Sequence”) fino a 8
byte. L’emettitore trasmette un bit recessivo di riconoscimento (ACK)
che viene sovrascritto dai bit dominanti emessi dai nodi destinatari che
hanno ricevuto con successo il messaggio trasmesso.
Il bit di fine sequenza (EOF “End Of Frame”) indica la fine del messaggio.
SOF
Identif.
A Fig. 20
RTR
IDE
r0
DLC
Data
FCS
EOF
IFS
Trama CAN
Il bit IFS (“Intermission Frame Space”) del bus deve rimanere in
posizione recessiva prima che parta la sequenza successiva. Se nessun
nodo è pronto ad emettere, il bus rimarrà nello stato in cui si trova.
La codifica dei bit possiede 2 valori, dominante e recessivo. Se 2 nodi
emettono contemporaneamente, il nodo ricevitore vedrà solo il valore
dominante. Nella codifica binaria il valore ‘0’ è dominante e il valore ‘1’
è recessivo. Quando un nodo emette viene sempre rilevato dal bus.
Se emette un valore recessivo e riceve un bit dominante, interrompe
l’emissione e continua a ricevere il bit dominante. Questo semplice
meccanismo evita le collisioni sul bus CAN.
Il messaggio con l’identificatore minore è prioritario sul bus.
CAN è un bus sistema ad accesso multiplo con rilevamento della per la
gestione delle collisioni e delle priorità dei messaggi (CSMA/CD+AMP).
Dal momento che le collisioni non si verificano mai, il bus CAN viene
spesso descritto come CSMA/CA (accesso multiplo con ricezione di
portante ed elusione di collisione).
La sequenza del messaggio descritta nella Fig. 21 è un frame di base.
Per applicazioni che richiedono un numero maggiore di identificatori è
stata creata la sequenza CAN estesa.
9
A Fig. 21
Trama base di un messaggio CAN
I messaggi di formato esteso possiedono 18 bit di identificazione
supplementari situati nell’intestazione dopo i bit di controllo. In questo
modo la gamma viene estesa da 211 a 229 identificatori diversi.
I due tipi di trame possono coesistere in un solo bus.
Schneider Electric
223
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
9.8
12:47
Pagina 224
Bus Can Open
CAN possiede più meccanismi diversi per rilevare messaggi non corretti:
- verifiche a ridondanza ciclica: la sequenza di verifica della trama (FCS)
contiene il controllo a ridondanza ciclica (CRC). Il ricevitore verifica il
CRC della trama e confronta il risultato con la FCS. Se non sono
uguali, significa che la trama contiene un errore CRC.
- verifiche della sequenza: il ricevitore rileva gli errori nella struttura della
trama. Se la trama ha una struttura difettosa di conseguenza conterrà
un errore di formato.
- verifiche di errore di riconoscimento: se il nodo ricevitore riceve una
trama senza errori emette un bit di riconoscimento (ACK) dominante.
Se il trasmettitore non riceve il bit di riconoscimento dominante emette
un errore di riconoscimento.
- verifica bit e compattazione dei bit: CAN utilizza la codifica NRZ.
b Presentazione di Can Open
Can Open definisce un livello di applicazione e un profilo di
comunicazione basato su CAN.
v Can Open definisce i seguenti oggetti di comunicazione
(messaggi)
-
Oggetto
Oggetto
Oggetto
Oggetto
dati di processo (PDO).
dati di servizio (S00).
gestione rete (NMT).
funzione speciale (SYNC, EMCY, TIME).
v Proprietà
-
Trasmissione dei dati seriali, basata su CAN.
Fino a 1 Mbit/s.
Efficacia di circa il 57 %.
Fino a 127 nodi (apparecchiature).
Possibilità di più stazioni master.
Interoperabilità di diverse apparecchiature di costruttori diversi.
v Dizionario degli oggetti
Al centro della tecnica Can Open vi è il dizionario degli oggetti (C Fig.22),
un’interfaccia tra il programma applicazione e l’interfaccia di comunicazione.
A Fig. 22
224
Dizionario degli oggetti Can Open
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 225
• Oggetti dati di processo (PDO)
Gli oggetti dati di processo (PDO) vengono utilizzati per la loro rapidità e
flessibilità di scambio dati. Un PDO può trasportare dati utili fino a 8 byte,
il massimo per una trama CAN. La trasmissione di un PDO funziona
secondo il modello producer-consumer o produttore-utilizzatore di CAN
esteso con trasferimenti sincronizzati. Il trasferimento sincronizzato
dei PDO si basa sul trasferimento dei messaggi SYNC sul bus CAN.
Un PDO viene inviato ciclicamente dopo un numero configurabile (da 1 a
240) di messaggi SYNC ricevuti. È inoltre possibile raggiungere la
disponibilità delle variabili del processo applicazione ed inviare un PDO
alla successiva ricezione di un messaggio SYNC.
Questo processo è detto trasferimento sincronizzato aciclico.
• Oggetti dati di servizio (SDO)
Gli oggetti dati servizio (SDO) sono previsti per la trasmissione dei
parametri. Gli SDO forniscono un accesso al dizionario dell’oggetto delle
apparecchiature distanti. Un SDO non ha limiti di lunghezza. Se i dati utili
non si adattano alla trama CAN vengono divisi in più trame CAN. Ogni
SDO viene azzerato.
La comunicazione SDO utilizza la comunicazione punto a punto, con un
punto che funge da server e gli altri da client.
• Oggetti di controllo gestione della rete (NMT)
Gli oggetti gestione rete (NMT) cambiano gli stati, o controllano gli stati di
un dispositivo Can Open (C Fig.23). Un messaggio NMT è un messaggio
con identificatore CAN 0; i messaggi NMT hanno quindi il livello di priorità
più alto. Il messaggio NMT comprende sempre 2 byte di dati utili nella
trama CAN. Il primo byte contiene il comando NMT codificato. Il secondo
byte contiene l’ID del nodo.
A Fig. 23
Gli oggetti gestione rete (NMT)
sotto Can Open
Dopo aver premuto il tasto di messa in servizio, un dispositivo CANopen
avvia l’inizializzazione. Terminata l’inizializzazione il dispositivo fornisce un
oggetto NMP di avviamento per avvisare il master.
Con oggetti NMT è implementato il protocollo di rilevamento di collisione
per il controllo dello stato dell’apparecchiatura.
• Oggetti funzioni speciali (SYNC, EMCY, TIME)
Can Open deve avere un produttore SYNC per sincronizzare le azioni dei
nodi Can Open. Un produttore SYNC emette (periodicamente) l’oggetto
SYNC con identificatore 128. Questo può generare un ritardo (“Pte”)
dovuto alla priorità di questo messaggio.
L’errore interno di un’apparecchiatura può generare un oggetto di emergenza
(EMCY). La reazione dei client EMCY dipende dalle applicazioni.
Lo standard Can Open definisce più codici di emergenza.
L’oggetto di emergenza viene trasmesso in una trama CAN unica da 8 byte.
Per trasmettere l’ora del giorno a più nodi Can Open può essere utilizzata
una trama CAN con l’ID CAN 256 e 6 byte di dati utili .
L’oggetto tempo (TIME) contiene la data e l’ora nell’oggetto di tipo
Time-Of-Day.
• Meccanismi di controllo (Watchdog)
Can Open possiede 2 metodi di controllo dello stato delle apparecchiature.
Un gestore di rete può esaminare regolarmente ogni apparecchio ad
intervalli di tempo configurabili. Questo metodo viene chiamato “Node
guarding” ed utilizza banda passante.
Schneider Electric
225
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
12:47
9.8
Pagina 226
Bus Can Open
Un altro meccanismo è l’invio regolare di un messaggio da parte di ciascun
apparecchio. Rispetto al Node guarding questo metodo consente un
risparmio della banda passante.
• Lunghezza della rete e portata
La lunghezza viene limitata dalla portata dovuta al sistema di priorità a
livello bit (C Fig.24)
Portata
(Kbit/s)
1000
800
500
250
125
50
20
10
Lunghezza
max. (m)
20
25
100
250
500
1000
2500
5000
A Fig. 24
Il procedimento di priorità mediante bit
Nelle pubblicazioni su Can Open la lunghezza massima più comunemente incontrabile
per una portata di 1 Mbit/s è di 40 m. Questa è calcolata senza isolamento elettrico,
come utilizzata nei prodotti Can Open di Schneider Electric. Tenendo conto
dell’isolamento elettrico, la lunghezza minimima del bus è di 4 m a 1 Mbit/s.
Tuttavia, l’esperienza ha dimostrato che in pratica la lunghezza massima è di 20m.
Portata
(kbps)
L max. (m) (1)
∑L max. (m)
a stelle locale (2)
Interval. min (m)
0,6 x ∑L locale (3)
∑L max. (m)
di tutti i bus (4)
A Fig. 25
1000
0,3
0,6
1,5
800
3
5
500
5
10
250
5
10
125
5
10
50
60
120
20
150
300
10
300
600
3,6
6
6
6
72
180
350
15
30
60
120
300
750
1500
Tabella dei limiti di lunghezza riguardanti le derivazioni
Limitazione di lunghezza delle derivazioni.
È necessario tenere conto delle limitazioni riguardanti le derivazioni fissate
dai parametri riportati nella tabella della Fig. 25.
(1) L max.: lunghezza massima di una derivazione.
(2) EL max. a stella locale: valore massimo della lunghezza totale delle
derivazioni nello stesso punto in caso di utilizzo di una scatola di
derivazione multiporta per realizzare una topologia a stella locale.
(3) Intervallo min.: Distanza minima tra 2 scatole di derivazione.
Lunghezza massima delle derivazioni nello stesso punto.
Valore calcolabile caso per caso per ciascuna derivazione: l’intervallo
minimo tra due derivazioni è uguale al 60% della lunghezza totale delle
derivazioni nello stesso punto.
(4) EL max. (m) di tutti i bus: valore massimo della lunghezza totale di tutti
i segmenti e delle derivazioni sul bus.
226
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 227
b Associazione secondo le classi di conformità
Schneider Electric ha definito le classi di conformità per le apparecchiature
master e slave Can Open analogamente a quanto fatto per Ethernet
Modbus TCP e i servizi Web. Le classi di conformità definiscono i
dispositivi compatibili con un’apparecchiatura e garantiscono una
compatibilità ascendente delle funzioni di ogni classe (C Fig.26).
Features
Slave classes
Layer Settings
M10
M20
Slave ID
1-16
1-63
1-127
Baudrate
125,250,500
M10 + 20,50,1000
M20 + 10, 800
LSS
-
-
Master
16
63
126
Devices Supported
NMT
SDO
PDO
SYNC
NMT-Master
CANopen
NMT- Master according to DS301 As M10
-
Boot-up procedure
Time stamp
Auto Config
SDO Client
SDO Server
SDO Manager
SDO data transfer
according to DSP302
none
1 SDO Server
Expedited, segment transfer
As M10
1 SDO Client
1 SDO Server
Expedited, segment transfer
COB-ID
PDO TT
PDO Inhibit Time
PDO Event Timer
SYNC
TRIGGER
ReadOnly
254, 255
None
none
Consumer
16 consumer
1 producer
no
No
ReadWrite
M10 + 0, 1-240
TPDO’s (Read/Write)
TPDO’s (Read/Write)
producer
consumer/producer
63 consumer
1 producer
yes
yes
Manager NMT- Master according
to DS301, Configuration Manager
according to DSP302
As M20
producer
support
2 SDO Client
1 SDO Server
1 SDO Manager
Expedited, segment, block
transfer
ReadWrite
as M20
TPDO’s (Read/Write)
RPDO’s & TPDO's (Read/Write)
producer / consumer
producer
As M20
126 consumer
1 producer
yes
yes
M10
M20
M30
1-16
125,250,500
1-63
M10 + 20,50,1000
none
LED or display
1-127
M20 + 10, 800
Slave
As S20
• Start Remote Node
• Stop Remote Node
• Enter Pre-Operational
• Reset Node
• Reset Communication
none
none
1 SDO Server
Expedited, segment transfer
As S10
As S20
none
none
1 SDO Server
Expedited, segment transfer
consumer
1 SDO Client
2 SDO Server
Expedited, segment, block
transfer
ReadWrite
as S20
EMCY
HEALTH
Heartbeat
ParmS
Node Guarding
Store Parameters
Slave classes
Layer Settings
Device Diag
Slave ID
Baudrate
LSS
Local Diagnostic
NMT
NMT – Slave
SDO
PDO
Time stamp
SDO Client
SDO Server
SDO data transfer
HEALTH
COB-ID
PDO TT
PDO Mapping Parametera
Connection Set
PDO Inhibit Time
PDO Event Timer
Heartbeat
ParmS
Node Guarding
Store Parameters
A Fig. 26
M30
ReadOnly
ReadWrite
254, 255
S10 + 0, 1-240
FIX (read)
FIX (read)
Predefined connection set
free
None
TPDO’s (Read/Write)
none
TPDO’s (Read/Write)
1 consumer
1 consumer
1 producer
1 producer
no
yes
No
yes
Note: the table mentions only the mandatory features.
9
free
TPDO’s (Read/Write)
RPDO’s & TPDO's (Read/Write)
As S20
yes
yes
Tabella di scelta delle classi di conformità
Schneider Electric
227
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
Reti industriali
12:47
Pagina 228
9.8 Bus Can Open
9.9 Sinergia Ethernet e Can Open
9.10 Bus AS-Interface (AS-I)
La tabella della Fig. 27 illustra le migliori soluzioni di associazione dei
prodotti disponibili in base alle classi di conformità.
Classe
di conformità
S10
S20
M10
Associazione
possibile
Restrizione
d'utilizzo
S30
M20
M30
A Fig. 27
Classe di conformità e migliori soluzioni di associazione prodotti
È tuttavia possibile utilizzare un apparecchio slave con un master di
classe di conformità inferiore (ad esempio S20 con M10), o un
apparecchio master con uno slave di classe di conformità superiore (ad
esempio M10 con S20), utilizzando solo gli apparecchi supportati dalla
classe di conformità di livello inferiore.
9.9
Sinergia Ethernet e Can Open
Applicazione client
Interfaccia del server
principale di riferimenti
generali CANopen
Un profilo comune di comunicazione (DS-301) definisce tra l’altro
l’allocazione degli identificatori COB-ID per ciascun tipo di messaggio.
Riferimenti generali
CANopen Interfaccia Client
Interfaccia del server
di riferimenti generali
CANopen
I diversi oggetti associati sono descritti da profili propri a ciascuna
gamma di prodotti, quali I/O digitali (DS-401), I/O analogici, variatori di
velocità (DS 402), encoder.
Mod bus
-
Mod bus
-
Interfaccia rete
Interfaccia rete
Rete
A Fig. 28
9.10
Comunicazione di Can Open in
una rete Eternet Modbus TCP
CAN in Automation e Modbus-IDA hanno collaborato per creare una
norma che consenta una trasparenza totale tra Can Open e Ethernet
Modbus TCP. Questa collaborazione ha prodotto la specifica CiA
DSP309-2, che definisce gli standard delle comunicazioni tra una rete
Ethernet Modbus TCP e un bus Can Open. La specifica definisce tra
l’altro i servizi di "mapping" che consentono ad apparecchiature Can
Open di comunicare su una rete Ethernet Modbus TCP attraverso un
gateway (C Fig.28).
L’accesso alle informazioni di un apparecchio Can Open è possibile
in lettura e in scrittura per numerose funzioni di controllo.
Bus AS-Interface (AS-I)
b Descrizione generale
Oggi le macchine integrano numerosi sensori ed azionatori e presentano
spesso l’esigenza di ottimizzare la funzione di sicurezza.
AS-Interface è la rete di cablaggio di tutti i dispositivi di campo
(sensori/azionatori) in grado di rispondere alle esigenze dei sistemi di
automazione industriali.
Con AS-Interface il trasporto di dati e potenza avviene tramite un unico
cavo bifilare. I componenti utilizzati su AS-Interface possono essere
facilmente sostituiti durante le operazioni di manutenzione;
il nuovo
slave riceve automaticamente l’indirizzo del prodotto sostituito.
AS-Interface è un’alternativa economica alla soluzione tradizionale di
cablaggio parallelo tra i controllori programmabili e i dispositivi di campo.
L'intera offerta Schneider Electric è conforme allo standard definito da
AS-international Organization, potente organizzazione internazionale
impegnata nello sviluppo costante e nella diffusione di AS-i.
AS-Interface è un sistema aperto che garantisce l'intercambiabilità e
l'interoperabilità tra i diversi prodotti del mercato.
228
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 229
AS-Interface è uno standard collaudato e pratico che ha dimostrato da oltre
10 anni la sua facilità d’impiego e la sua affidabilità in diversi settori (trasporto
su nastro, movimentazione, assemblaggio) come illustrato nella Fig. 29.
A Fig. 29
1
2
1
2
AS-Interface
Interfaccia IP20
Interfaccia IP67
Componente di controllo
Componente di dialogo
1
2
1
2
Controllore di sicurezza
Interfaccia di sicurezza
Alimentazione potenza
Master AS-I
Caratteristico di AS-Interface è il cavo giallo (C Fig.30) piatto e profilato
che consente di agganciare a scatto e in qualsiasi punto qualunque
prodotto partner in modo semplice e protetto contro le inversioni di
polarità. Una presa vampiro speciali permette il collegamento e lo
spostamento di un sensore/azionatore senza alcun utensile aggiuntivo.
AS-Interface è esclusivamente un bus di campo tipo master/slave,
comprendente un "master" (PC, API, Controllore …) incaricato di garantire
la gestione degli stati dei sensori/attuatori e di trasmetterli al sistema di
automazione. Tra i vantaggi offerti da ASì vi è la flessibilità nella configurazione:
9
A Fig. 30
Componenti dell’AS-Interface
che si tratti di una struttura a linea, a stella o ad albero, AS-i non pone
alcuna limitazione nella struttura o nella topologia di rete.
Per dieci anni AS-i è stata utilizzata solo per il cablaggio dei
sensori/azionatori ON/OFF. Alcuni fornitori proponevano anche versioni
analogiche lente per le misure di temperatura o livello, ma i prodotti erano
proprietari e il numero di indirizzi limitato a 31 rendeva marginale
l’interesse di queste applicazioni.
Il consorzio ha così lanciato la nuova versione V2 che raddoppia il numero
di indirizzi arrivando ad un totale di 62 slave ON/OFF possibili per master.
Tuttavia la grande evoluzione risiede nella capacità di ricevere componenti
di tipo analogico consentendo quindi il cablaggio misto di dispositivi
analogici e digitali. In questo caso il numero di slave collegabili si riduce
restando comunque nei limiti di fattibilità. Questo profilo permette di
collegare qualunque sensore/azionatore analogico su qualsiasi stazione
master AS-i.
Schneider Electric
229
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
12:47
Pagina 230
9.10 Bus AS-Interface (AS-I)
Questa nuova versione introduce inoltre dei cambiamenti a livello della
diagnostica rete. Nella prima versione venivano rilevati solo i difetti della
rete mentre la V2 rileva anche tutti i difetti interni ai moduli.
Naturalmente la compatibilità della versione V2 e della nuova versione V1
sulla stessa rete è garantita.
b I vantaggi di AS-Interface (C Fig.31)
Semplicità
La semplicità del sistema di cablaggio è dovuta a:
• L’utilizzo di un unico cavo per collegare tutti i
componenti (sensori ed attuatori) del sistema di
automazione.
• Funzione di gestione delle comunicazioni
integrata ai prodotti.
Riduzione dei costi
I costi possono essere ridotti fino al 40 % mediante:
• Riduzione dei tempi di progettazione, installazione,
messa a punto, messa in servizio ed evoluzioni.
• Guadagno di spazio nelle cassette, grazie a
prodotti più compatti e all’eliminazione di
cassette intermedie dal momento che la maggior
parte delle funzioni può essere delocalizzata
sulla macchina.
• Eliminazione delle canalizzazioni dei cavi di
controllo e riduzione delle canaline.
Sicurezza
AS-Interface consente di aumentare l’affidabilità, la
disponibilità operativa e la sicurezza:
• Gli errori di cablaggio non sono più possibili.
• Nessun rischio di errori di connessione.
• Forte immunità alle interferenze elettromagnetiche
(EMC).
• Le funzioni di sicurezza della macchina possono
essere totalmente integrate nell’AS-Interface.
A Fig. 31
230
I vantaggi di AS-Interface
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 231
b I componenti di AS-Interface
I prodotti AS-i sono suddivisi in famiglie (C Fig.32); per ulteriori
informazioni o dettagli consultare i cataloghi prodotti di Schneider Electric.
Le interfacce per
prodotti generici
Consentono a qualunque prodotto standard (sensore, azionatore, avviatore, ecc...) di essere collegato su una
rete AS-Interface.
Permettono una grande libertà nella scelta e sono particolarmente adatti alle modifiche e miglioramenti delle
macchine che venivano precedentemente realizzate in cablaggio convenzionale.
Queste interfacce sono disponibili per montaggio in cassette (IP20) o montaggio diretto sulla macchina (IP67).
Le interfacce déedicate Le interfacce dedicate (moduli di comunicazione...) consentono la comunicazione con il cavo AS-Interface.
e componenti
I componenti dedicati integrano un’interfaccia e possono quindi essere collegati direttamente sul cavo ASInterface.
Consentono un cablaggio molto rapido, ma offrono una scelta meno ampia rispetto ai componenti generici.
Il master
È il componente centrale del sistema; la sua funzione è la gestione degli scambi di dati con le interfacce e i
componenti (chiamati anche slave) ripartiti nell’installazione. Può ricevere:
31 interfacce o componenti in versione V1 (tempo ciclo 5ms)
62 interfacce o componenti in versione V2 (tempo ciclo 10ms)
Il master può essere:
integrato in un controllore programmabile, ad esempio sotto forma di un’estensione, oppure collegato al bus di
campo, si tratta allora di un gateway.
L’alimentazione
AS-Interface
È un’alimentazione bassissima tensione da 29.5 a 31.6V per le interfacce e i componenti alimentati attraverso
il cavo AS-Interface. È protetta contro le sovratensioni e i cortocircuiti.
Su una linea AS-Interface è possibile utilizzare solo questo tipo di alimentazione.
Poiché il cavo AS-Interface è limitato in corrente, talvolta è necessario aggiungere un’alimentazione
supplementare per alcuni circuiti, in particolare per gli azionatori.
Il cavo piatto
Il cavo giallo, collegato all’alimentazione di potenza, garantisce le due seguenti funzioni:
- Trasmissione dei dati tra il master e gli slave.
- Alimentazione dei sensori e degli azionatori.
Il cavo nero, collegato all’alimentazione ausiliaria 24V, fornisce la potenza agli azionatori, ma anche ai sensori con
ingressi isolati.
Il profilo meccanico di questi cavi rende impossibili le inversioni di polarità; il materiale utilizzato consente una
connessione rapida ed affidabile dei diversi componenti. In caso di sconnessione di un prodotto, ad esempio per
modifica dell’apparecchiatura, il cavo torna alla sua forma originale.
Questi cavi supportano 8A massimo e sono disponibili in due versioni:
- In gomma per le applicazioni standard.
- In TPE per le applicazioni ove i cavi sono sottoposti a spruzzi di olio.
Soluzioni di sicurezza
su AS-Interface
(Vedere il capitolo 6
dedicato alla sicurezza)
Le informazioni standard del processo possono essere trasmesse allo stesso tempo e sullo stesso mezzo delle
informazioni relative alla sicurezza fino ad un livello 4 dello standard EN 60954-1.
L'integrazione nell’AS-Interface viene realizzata mediante aggiunta di un controllore di sicurezza e di componenti
di sicurezza collegati sul cavo giallo AS-Interface.
Le informazioni di sicurezza vengono scambiate solo tra il controllore di sicurezza e i suoi componenti; questo è
trasparente per le altre funzioni standard. In questo modo, è possibile aggiungere su un’installazione AS-i
esistente un sistema di sicurezza.
Il terminale d’indirizzamento Poiché i componenti sono collegati in parallelo sul bus AS-Interface, è necessario assegnare un indirizzo diverso
a ciascuno di essi.
Questa funzione è garantita da un terminale che si collega singolarmente ai diversi componenti.
A Fig. 32
I componenti di Asi-Interface
Schneider Electric
231
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
Reti industriali
12:47
Pagina 232
9.10 Bus AS-Interface (AS-I)
b Principio di funzionamento della rete AS-i
v Collegamento
Il sistema di collegamento utilizzato viene comunemente chiamato «presa
vampiro». Il connettore comporta due aghi che effettuano il collegamento
elettrico mediante perforazione dell’isolante del cavo.
Le due parti del connettore vengono in seguito avvitate una sull’altra per
garantire la qualità della connessione. Questo tipo di connettore (C Fig.
33) è normalizzato e consente di realizzare facilmente qualsiasi tipo di
apparecchiatura con livello di protezione fino a IP67.
A Fig. 33
Principio del collegamento As-i
v Modulazione dei segnali
La rete As-i funziona senza bisogno di terminatore qualunque sia la topologia
utilizzata. Il principio utilizza la modulazione della corrente basata su una
codifica Manchester; due induttanze situate nell’alimentazione convertono
questo segnale in tensione sinusoidale. La forma del segnale generato evita di
schermare il cavo (C Fig.34).
v Lunghezza della rete
La lunghezza della rete è condizionata dalla deformazione del segnale e
dalla caduta di tensione in linea. La distanza massima tra due slave non
deve superare i 100m (C Fig.35). Questa distanza può essere aumentata
aggiungendo dei ripetitori con i seguenti limiti:
- due ripetitori al massimo per linea,
- la distanza massima con il master non deve superare i 300m,
- l’utilizzo di una terminazione passiva consente di aumentare la
distanza da 100m a 200m,
- una terminazione attiva consente di raggiungere i 300m.
A Fig. 34
Forma dei segnali corrente e tensione
A Fig. 35
232
Lunghezze limite della rete As-i
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 233
v Principio del protocollo
Il principio di comunicazione si basa su un protocollo ad un solo master.
Il sistema master interroga gli slave a turno, questi ultimi rispondono
inviando i dati richiesti (C Fig.36). Quando tutti gli slave sono stati
interrogati, il ciclo si ripete e continua all’infinito. Il tempo di ciclo dipende dal
numero di slave del sistema che è facilmente determinabile.
A Fig. 36
Trame master e slave
As-i utilizza diversi metodi per garantire la sicurezza del trasferimento dati.
Il segnale viene verificato dal ricevitore, se non ha la forma richiesta non
viene preso in considerazione. L’utilizzo di un bit di parità associato ad un
messaggio breve (7 e 14 bit) garantisce l’integrità logica dell’informazione.
A Fig. 37
Costituzione del tempo di risposta
Il tempo morto del master provoca l’azzeramento(C fig.37).
La durata di un bit è di 6 μs. Alla velocità di 166.67 Kbit/s, aggiungendo
tutti i bit di pausa, il tempo di ciclo massimo non supererà i 5082 μs.
• Ogni ciclo si divide in tre parti
- scambio dati,
- gestione del sistema,
- aggiornamento/inserimento di uno slave.
Il profilo AS-Interface del master determina le sue esatte capacità.
Generalmente AS-Interface possiede le seguenti funzioni:
- inizializzazione del sistema,
- identificazione degli slave collegati,
- trasmissione dei parametri slave agli slave,
- garanzia dell’integrità degli scambi dati ciclici con gli slave,
- gestione delle diagnostiche del sistema (stato di funzionamento degli
slave, controllo del blocco di alimentazione, ecc...),
- comunicazione di tutti gli errori rilevati al controlllore del sistema
(controllore programmabile, ecc...),
- riconfigurazione degli indirizzi degli slave se il sistema subisce una
qualunque modifica.
Gli slave decodificano le domande provenienti dal master e rispondendo
immediatamente. Tuttavia, uno slave non risponderà a comandi errati o
inappropriati provenienti dal master. Le capacità funzionali di uno slave
sono definite dal suo profilo AS-Interface.
Schneider Electric
233
9
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
Reti industriali
21-11-2009
12:47
Pagina 234
9.10 Bus AS-Interface (AS-I)
b Topologia e cablaggio di AS-Interface
La mancanza di limitazione permette qualsiasi tipo di configurazione e di
A Fig. 38
Tipi di reti possibili
collegamento tra sensori e azionatori; la Fig. 38 illustra alcune tipologie.
b Le versioni di AS-Interface
La prima versione (V1) è stata seguita dall’evoluzione V2.1 con le seguenti
funzioni aggiuntive:
- possibilità di collegare un massimo di 62 slave, mentre la versione V1
ne accettava solo 31,
- possibilità di trasmettere un messaggio "guasto periferico" al master
senza inibire lo slave che conserva la possibilità di funzionare quando
la continuità di servizio è fondamentale,
- elaborazione degli slave analogici.
b Profilo
Il profilo di un’apparecchiatura AS-Interface determina le sue capacità.
Due prodotti AS-Interface con le stesse funzioni e lo stesso profilo
funzionano esattamente allo stesso modo, qualunque sia il costruttore e
sono intercambiabili all’interno di uno stesso sistema.
Il profilo è fissato di base con due o tre caratteri programmati
nell'elettronica interna dell’apparecchiatura e non è modificabile.
Ad oggi l'associazione AS-i ha definito oltre 20 profili, qui di seguito
descritti.
234
Schneider Electric
11500-CHAPITRE-9_5.qxd:11500-CHAPITRE-9_5.qxd
21-11-2009
12:47
Pagina 235
La tabella della Fig. 39 mostra le compatibilità tra le diverse versioni
Slave V1
Slave V2.1 con
indirizzamento standard
Slave V2.1 con
indirizzamento esteso
Slave analogico
Master V1
Compatibile
Compatibile ma i
guasti di periferica
non sono segnalati
Non compatibile
Non compatibile
Master V2
Compatibile
Compatibile
Compatibile
Compatibile
A Fig. 39
Le versioni di As-Interface: le compatibilità
v Profili del master
I profili del master definiscono le capacità proprie di ciascun master AS-i.
Sono disponibili quattro tipi di profili del master: M1, M2, M3, M4;
quest’ultimo è compatibile con le versioni precedenti.
v Profili dello slave
Tutti gli slave dispongono di un profilo; questo significa che sono
considerati periferiche "As-i" con circuito ASIC integrato.
Fanno parte di questa categoria i componenti dedicati (quali gli azionatori
intelligenti) e le interfacce (che collegano dei componenti tradizionali al
sistema AS-Interface). I profili, simili a schede d'identità, sono stati definiti
per distinguere gli azionatori e i sensori suddividendoli in grandi famiglie.
Il sistema dei profili è particolarmente utile quando si tratta di sostituire
uno slave. Ad esempio, due azionatori prodotti da costruttori diversi, ma
con lo stesso profilo, sono funzionalmente intercambiabili senza
programmazione, né indirizzamento.
9.11
Conclusione
L’impiego di reti di comunicazione nelle architetture di un sistema di
automazione industriale consente di aumentare la loro flessibilità e quindi
di rispondere alle esigenze di adattamento delle macchine e delle
installazioni. Per effettuare una buona scelta tra la moltitudine di reti di
comunicazione esistenti, sono necessarie conoscenze specifiche.
La scelta può essere effettuata seguendo alcuni semplici criteri:
apertura, standardizzazione e adeguamento.
- Scegliere una rete aperta, invece di una rete proprietaria, consente di
rimanere liberi dalla scelta dei suoi fornitori di prodotti di automazione.
- Scegliere una rete standardizzata a livello internazionale consente di
garantirne la perennità e l’evoluzione.
- Scegliere un buon equilibrio tra le esigenze della macchina o
dell’installazione e le prestazioni della rete consente di ottimizzare il
proprio investimento.
Quest’ultimo punto è quello che, verosimilmente, richiede una
conoscenza precisa dell’offerta delle reti di comunicazione che per lungo
tempo è stata percepita come complessa, sia per la selezione che per la
messa in opera o la manutenzione. Tutti i fornitori hanno lavorato per
ovviare a questa difficoltà. Schneider Electric ha, da parte sua, deciso di
proporre solo reti di comunicazione realmente aperte, basate su standard
internazionali e adatte alle esigenze dei diversi livelli di architettura di un
sistema di automazione, definendo delle classi d’implementazione che
consentano di effettuare una scelta semplice e ottimale.
Schneider Electric
235
9