ELETTRO MAGNETISMO
Appunti di Teoria
Massimiliano Carfagna
Dipartimento
di Fisica
68
INDICE
Indice
VI.
MAGNETISMO NELLA MATERIA ............ 71
VI.1.
Magnetizzazione: premessa qualitativa ..................... 71
VI.2.
Interpretazione microscopica ..................................... 71
VI.3.
Polarizzazione magnetica............................................ 74
VI.4.
Il vettore campo magnetico......................................... 76
VI.5.
Condizioni al contorno per le eq.ni di Maxwell ........ 78
VI.6.
Permeabilità magnetica e sucettività magnetica ....... 79
VI.7.
Precessione di Larmor................................................. 80
VI.8.
Funzione di Langevin .................................................. 82
VI.9.
Sostanze diamagnetiche e paramagnetiche ............... 83
VI.10.
Sostanze ferromagnetiche (isteresi)............................ 85
VI.11.
Circuiti magnetici. ....................................................... 88
VI.12.
Elettromagneti ............................................................. 90
VI.13.
Magneti permanenti .................................................... 91
VII.
CAMPI VARIABILI NEL TEMPO ............. 94
VII.1.
Premessa....................................................................... 94
VII.2.
Induzione elettromagnetica......................................... 94
VII.3.
Legge di Farady – Neumann....................................... 96
VII.4.
Cause della variazione di flusso.................................. 98
VII.5.
Terza eq.ne di Maxwell (caso non stazionario) ....... 100
VII.6.
Autoinduzione ed induttanza.................................... 102
VII.7.
Analisi del circuito RL (serie) ................................... 103
68
INDICE
VII.8.
Solenoidi percorsi da corrente.................................. 109
VII.9.
Legge di Felici e induzione mutua............................ 110
VII.10. Energia magnetica ..................................................... 113
VII.11. Quarta equazione di Maxwell................................... 117
VIII.
CORRENTI ALTERNATE.................... 122
VIII.1. Premessa..................................................................... 122
VIII.2. Grandezze alternate .................................................. 125
VIII.3. Il metodo simbolico.................................................... 127
VIII.4. Analisi del circuito RLC (serie in AC) ..................... 128
IX.
ONDE ELETTROMAGNETICHE ............. 133
IX.1.
Considerazioni introduttive ...................................... 133
IX.2.
Eq.ne delle onde elettromagnetiche.......................... 134
IX.3.
Onde elettromagnetiche piane .................................. 136
IX.4.
Onde elettromagnetiche nei dielettrici..................... 139
IX.5.
Onde elettromagnetiche nei conduttori ................... 142
IX.6.
Spettro delle onde elettromagnetiche....................... 147
IX.7.
Vettore di Poynting.................................................... 147
IX.8.
Quantità di moto e pressione di radiazione ............. 151
IX.9.
Tensore degli sforzi di Maxwell................................ 153
IX.10.
Potenziali elettrodinamici ......................................... 156
IX.11.
Effetto Doppler .......................................................... 160
IX.12.
Condizioni di raccordo .............................................. 162
69
INDICE
70
Massimiliano Carfagna
Magnetismo nella materia
VI. Magnetismo nella materia
VI.1. Magnetizzazione: premessa qualitativa
Supponiamo di prendere un blocco di materiale generico e di introdurlo all’interno di
un campo magnetico uniforme. Si osservano le seguenti reazioni:
a) il materiale può essere risucchiato dal campo con una forza abbastanza
intensa (circa quanto la forza peso). In questo caso la sostanza di cui è
costituito il materiale prenderà verrà chiamata ferromagnetica;
b) il materiale può essere attratto con una forza meno intensa di quella
esercitata nel caso in cui la sostanza sia ferromagnetica, in questo caso
si dice che la sostanza è paramagnetica;
c) il materiale può essere respinto con una forza di intensità uguale al
caso paramagnetico, ma di verso opposto, ed in situazione la sostanza
che si comporta così prenderà il nome di diamagnetica.
Il comportamento dei materiali in presenza di un campo magnetico esterno ad essi è
molto simile, per certi versi, al comportamento che si ha quando i dielettrici sono posti in
presenza di campi elettrici esterni (si pensi, ad esempio, al materiale dielettrico interposto tra
le armature di un condensatore, anch’esso viene risucchiato!).
A livello qualitativo, infatti, accade che in presenza di un campo magnetico esterno la
materia possiede un momento magnetico globale, mediamente nullo. La presenza di un
campo magnetico esterno comporta l’alterazione di questo stato in quanto il momento
magnetico posseduto da ogni singolo atomo si dispone parallelamente alla direzione del
campo magnetico esterno, cosicché preso un volume generico del materiale in questione,
esso avrà momento magnetico globale non nullo. Il principale effetto di questo fenomeno è
la produzione di un campo magnetico esterno con conseguente produzione di effetti locali,
quali le correnti microscopiche, o amperiane. Questo fenomeno prende il nome di
polarizzazione magnetica o magnetizzazione.
VI.2. Interpretazione microscopica
La materia è composta da tomi, per cui se pensiamo che la polarizzazione magnetica
modifica il momento magnetico di alcune porzioni di materia, allora possiamo interpretare il
fenomeno pensando che la magnetizzazione altera i momenti magnetici posseduti da ogni
singolo atomo. Ovviamente andare ad indagare a fondo questo problema vuol dire
scomodare la Meccanica Quantistica, anche se è possibile giungere a risultati accettabili e
veritieri anche utilizzando metodi classici.
71
Massimiliano Carfagna
Magnetismo nella materia
Supponiamo di voler calcolare il momento magnetico di un atomo di idrogeno nel
suo stato fondamentale. Come prima cosa possiamo renderci conto che l’atomo in questione
può essere considerato come una spira circolare percorsa da corrente, infatti la rotazione
dell’elettrone genera una corrente (che scorre in verso opposto all’elettrone stesso), cosicché
il sistema atomico è del tutto equivalente alla spira percorsa da corrente. La corrente in
questione è data dalla quantità di carica che passa nell’unità di tempo fondamentale, il
periodo T0 di rotazione dell’elettrone attorno al nucleo, per cui:
e−
Ia =
T0
1.
in cui e − è la carica dell’elettrone. Per via del teorema di equivalenza di Ampere, il
momento magnetico della spira percorsa da corrente sarà:
r
m = I a ⋅ S ⋅ nˆ = I a ⋅ π ⋅ r02 ⋅ nˆ
2.
dove r0 è il raggio dell’orbita, mentre n̂ è la normale al piano della spira.
A questo punto ci risultano incogniti i valori del raggio e del periodo relativi
all’atomo di idrogeno, per calcolarli, quindi, possiamo ragionare nel modo seguente:
l’elettrone ruota attorno al nucleo per via dell’equilibrio dinamico instaurato da due forze: la
r
r
forza di Coulomb FColu (attrattiva) e la forza centrifuga Fcentr (repulsiva), quindi scriveremo
che:
r
r
FColu = Fcentr
⇓
3.
⎛ 2π ⎞
1 e2
4π
e2
2
3
⎟⎟r0 ⇒ T0 =
⋅
= meω 0 r0 ⇒
⋅
= me ⎜⎜
πε 0 me r0
4πε 0 r02
4πε 0 r02
T
e
⎝ 0 ⎠
Per il calcolo del raggio possiamo sfruttare l’energia di ionizzazione dell’atomo di idrogeno,
il cui valore è noto, e lo indichiamo con Li . Essa consiste nel lavoro necessario per portare
l’elettrone dal suo stato fondamentale all’infinito. Ovviamente il suo valore sarà uguale in
modulo ed opposto in segno all’energia meccanica totale posseduta dall’elettrone durante la
rotazione, ossia:
⎛1
1 e2 ⎞
⎟
Li = − ETOT ⇒ Li = −(K e + U e ) ⇒ Li = −⎜⎜ me v 02 −
4.
4πε 0 r0 ⎟⎠
⎝2
r
r
Possiamo notare che moltiplicando la FCoul = Fcentr per un fattore (1 2)r0 si ottiene che
1
1 e2 1
1
= meω02 r02 = me v02 = K e
5.
8πε 0 r0 2
2
Questo vuol dire che l’energia di ionizzazione (valore noto) può essere scritta anche come:
⎛ 1 e2
1 e2 ⎞
1 e2
⎟⎟ = −
Li = −(K e + U e ) ⇒ Li = −⎜⎜
−
6.
8πε 0 r0
⎝ 8πε 0 r0 4πε 0 r0 ⎠
Quindi per ricavare il raggio e il periodo basta eseguire i seguenti calcoli:
72
Massimiliano Carfagna
Magnetismo nella materia
⎧
1 e2
⎪r0 =
⎪
8πε 0 Li
7.
⎨
⎪T = 4π πε m r 3
0 e 0
⎪⎩ 0
e
A questo punto è doverosa una osservazione: il momento magnetico posseduto
dall’atomo è proporzionale al momento angolare dell’elettrone calcolato rispetto al nucleo,
infatti se si confrontano le due espressioni risulta evidente che:
r
e−
m = I a ⋅ S ⋅ nˆ = I a ⋅ π ⋅ r02 ⋅ nˆ =
⋅ π ⋅ r02 ⋅ nˆ
T0
8.
r
⎛ 2πr0 ⎞
2me
r r
2
⎟⎟r0 ⋅ nˆ =
L = me v 0 × r0 = me v 0 r0 ⋅ nˆ = me ⎜⎜
π ⋅ r0 ⋅ nˆ
T
T
0
⎝ 0 ⎠
Facendo il rapporto membro a membro tra la (7.) e la (8.) si ottiene una quantità che nella
fisica atomica è molto importante, in quanto caratterizza gli atomi, ossia il cosiddetto
rapporto giromagnetico:
m
e
g= =
9.
L 2me
In cui abbiamo scritto e al posto di e − in quanto vogliamo il valore algebrico della carica,
senza il segno. La sua importanza risiede nel fatto che il rapporto giromagnetico dipende
solo dalle proprietà intrinseche dell’elettrone (carica e massa).
Un’altra considerazione utile da fare riguarda il momento angolare, in quanto, dalla
r
Meccanica Quantistica si ricava che il modulo di L risulta essere multiplo intero della
costante universale h = h 2 π , in cui h è la costante di Plance:
h
L = l⋅h = l⋅
con l = 0,1,...
10.
2π
Dalla quantizzazione del momento angolare e dal rapporto giromagnetico si ricava
anche un’altra quantità utile, ossia:
e
e
eh
m=
⋅L =
⋅l⋅h =
⋅ l = mb ⋅ l
11.
2m e
2 me
2 me
In cui la costante m b prende il nome di magnetone di Bohr.
Il momento magnetico che interessa i fenomeni di polarizzazione magnetica, però,
non possiede solo una componente derivante dalla rotazione dell’elettrone attorno al nucleo
r
(ossia m ), ma anche dal momento magnetico proprio, detto momento magnetico di spin (o
semplicemente spin), che deriva dalla rotazione dell’elettrone (e quindi della sua carica
immaginata come una distribuzione sferica) attorno ad un suo asse baricentrale.
Si verifica sperimentalmente che il momento magentico di spin del protone del
neutrone e dell’elettrone vale
r h
s =
12.
2
Nel calcolo del momento magnetico totale di un singolo atomo sarebbe necessario anche
tener conto del momento magnetico di spin generato dai nucleoni, oltre che dagli elettroni,
73
Massimiliano Carfagna
Magnetismo nella materia
ma questa quantità si trascura dato essi sono più massivi (di almeno tre ordini di grandezza)
rispetto all’elettrone e quindi lo spin è di tre ordini di grandezza inferiore, dunque è
trascurabile.
Possiamo inoltre aggiungere che il calcolo del momento magnetico totale dell’atomo dovrà
essere fatto anche tenendo presente le regole fondamentali della Meccanica Quantistica,
quali il Principio di esclusione di Pauli e la Quantizzazione della proiezione del momento
angolare.
VI.3. Polarizzazione magnetica
In analogia con quanto è stato sviluppato in presenza di fenomeni di polarizzazione
elettrica, anche nel caso della polarizzazione magnetica risulta necessaria l’introduzione di
r
una nuova quantità detta vettore polarizzazione magnetica M , o anche intensità di
magnetizzazione.
Questo vettore non è altro che il momento magnetico per unità di volume, associato
ad un materiale, infatti, se pensiamo che ogni atomo di un volume ∆τ del materiale in
questione, può essere assoggettato ad una spira percorsa da corrente, ognuna delle quali
r
possiede momento magnetico mi , detto ∆N il numero di atomi contenuti nel volume ∆τ ,
definiamo vettore polarizzazione magnetica la quantità:
⎛ 1 ∆N r ⎞
r
∆N r
M = lim ⎜
mi ⎟ = lim
⋅
⋅ m
13.
⎜
⎟
∆τ →0 ∆τ
∆τ →0 ∆τ
i =1
⎝
⎠
r
nella quale la quantità m è la media vettoriale dei diversi momenti magnetici associati alle
∑
spire contenute nel volume considerato. È necessario, però, precisare che il volume
considerato deve necessariamente essere abbastanza grande da contenere un numero
statisticamente significativo di molecole.
Dobbiamo notare che questa nuova quantità, in generale, è una funzione della
posizione, all’interno del materiale considerato, ossia vuol dire che essa sarà una funzione
r
r
delle coordinate spaziali, M = M ( x, y, z ) , inoltre è necessario tener presente che in assenza
di magnetizzazione le spire sono orientate in maniera del tutto casuale, mentre quando il
materiale si magnetizza le spire si dispongono in modo che la loro superficie sia ortogonale
r
ad M .
La magnetizzazione, dunque, ha come naturale conseguenza, la produzione di
r
correnti aggiuntive microscopiche la cui densità di corrente viene indicata con J m . Lo
scopo, a questo punto, è quello di trovare una relazione che leghi le correnti microscopiche
con il vettore polarizzazione magnetica. Per farlo, come prima cosa, è utile suddividere
r
l’analisi nei due casi principali, il primo è quello che vede M uniforme, mentre il secondo
r
vede M variabile:
r
1. M = cost: in questo caso possiamo prendere un volume significativo di
materiale, esso sarà riempito in maniera uniforme da queste spire piane nelle
quali circola la corrente. Nei punti di contatto delle spire le correnti si
74
Massimiliano Carfagna
Magnetismo nella materia
annulleranno in quanto esse sono opposte in verso ed uguali in modulo (vedi
figura). Inoltre, dato che queste spire hanno area infinitesima rispetto alle
dimensioni del materiale (la loro area è quella di una circonferenza di raggio
r0 = 0,5 Å), si può assumere che, all’interno del materiale, esse siano
“toccate” in tutti i punti da altre spire e quindi si annulleranno dappertutto
tranne che sulle superfici esterne del materiale. Con ciò possiamo concludere
che se la magnetizzazione è uniforme allora le correnti amperiane sono solo
r
superficiali. In formule si ha che, preso un tratto dh lungo la superficie del
materiale, detta dQm la quantità di carica microscopica, si ha che la corrente
può essere scritta come:
r r
dQ m
= J ms dh
dt
r
r
2. M = M ( x, y, z ) : in questo caso, non si ha una distribuzione uniforma di spire
elementari, e ciò comporta che solo una parte delle correnti si annulla
effettivamente, mentre la parte rimanente genera una corrente amperiana
r
all’interno del materiale la cui densità viene indicata con J mv (dove l’indice v
stà a significare che essa è di volume). Seguendo il ragionamento precedente
appare chiaro che, volendo sapere la corrente microscopica di volume è
r
necessario prendere un’area infinitesima dS e scrivere che:
r
dQm r
= J mv ⋅ dS
dt
A questo punto, per proseguire nel nostro scopo, è possibile procedere nello stesso
modo in cui si sono ricavate le distribuzioni di carica dovute alla polarizzazione (passando,
però, in questo caso, per il potenziale vettore), oppure è possibile ragionare in maniera più
qualitativa e giungere a ricavare le relazioni cercate (relazioni che legano le densità di
corrente all’intensità di magnetizzazione).
Supponiamo di avere un materiale a forma di parallelepipedo con il lato maggiore
disposto lungo l’asse x di un riferimento ortonormale. Supponiamo, inoltre, che l’intensità
di magnetizzazione sia ortogonale alla faccia superiore del parallelepipedo e che il vettore
r
M in questione sia funzione della sola x , in modo che all’aumentare di x aumenti anche
r
r
r
l’intensità di M , per cui M = M ( x ) . Il vettore intensità di magnetizzazione ha le seguenti
coordinate:
r
14.
M ≡ (0,0, M z ( x ))
Supponiamo di suddividere il parallelepipedo in due cubi affacciati di dimensioni
dx, dy, dz , nei quali scorreranno rispettivamente due correnti amperiane I 1 ed I 2 . Se
pensiamo di scrivere i momenti magnetici elementari associati ai due cubi scriveremo che:
M z (x )dxdydz = dI 1 dxdy
15.
M z (x + dx )dxdydz = dI 2 dxdy
dM z
ma la quantità M z (x + dx ) può essere scritta nella forma equivalente M z (x ) +
dx ,
dx
75
Massimiliano Carfagna
Magnetismo nella materia
quindi:
dM z ⎞
⎛
dx ⎟dxdydz = dI 2 dxdy
⎜ M z (x ) +
16.
dx
⎝
⎠
in definitiva possiamo calcolare la differenza tra le due correnti elementari, per conoscere la
corrente di volume che passa all’interno del materiale, in corrispondenza della direzione y ,
ovverosia sulla faccia in colore in figura:
dM z
dM z
dI y = M z ( x )dz − M z ( x )dz −
dxdz = −
dxdz
17.
dx
dx
Abbiamo detto in precedenza che, nel caso di magnetizzazione non uniforme, le
correnti amperiane di volume erano date dalla:
r
dQm r
= J mv ⋅ dS
18.
dt
la quale confrontata con l’ultimo risultato ottenuto fornisce le seguenti uguaglianze:
r
dM z
J mv y = −
19.
dx
r
ma questa scrittura non è altro che la componente y del rotore di M , infatti, si verifica che:
ˆj
iˆ
kˆ
r
r
r
rot M = ∂ x ∂ y
∂ z ⇒ J mv = rot M
20.
Mx My Mz
( )
( )
( )
Seguendo ragionamenti diversi si può giungere ad una relazione simile anche per la
densità di corrente microscopica superficiale, ma ci limitiamo a riportare i risultati definitivi
senza addentrarci in ulteriori calcoli. Pertanto, possiamo scrivere che il vettore
magnetizzazione, a seconda dei casi, equivale alle:
r
r r
r
r
J mv = ∇ × M ; J ms = M × nˆ
21.
VI.4. Il vettore campo magnetico
Come è stato fatto anche per le equazioni di Maxwell nel caso della polarizzazione
elettrica, anche per la polarizzazione magnetica è necessario modificare le equazioni di
Maxwell relative al campo magnetico.
La modifica consiste, sostanzialmente, nell’aggiunta del vettore di densità delle
r
r
correnti microscopiche di volume J mv (e non del vettore J ms in quanto esso tratta le correnti
microscopiche superficiali, le quali scorrono su porzioni di spazio – le superfici dei
materiali, per l’appunto – sulle quali le equazioni di Maxwell, non sono definite, in quanto
r
sulle linee di separazione B subisce una discontinuità), cosicché, dati gli ultimi sviluppi,
possiamo scrivere che:
r r
r r
⎪⎧∇ ⋅ B = 0
⎪⎧∇ ⋅ B = 0
r r ⇒ ⎨r r
r r r
22.
⎨r r
⎪⎩∇ × B = µ 0 J + J mv
⎪⎩∇ × B = µ 0 J + ∇ × M
(
)
76
(
)
Massimiliano Carfagna
Magnetismo nella materia
Possiamo operare le seguenti manipolazioni matematiche in modo da giungere
all’introduzione di una nuova quantità:
r
r
r r
r r r
r r
r
r
r ⎛ B − µ0 M ⎞ r
⎟=J
∇ × B = µ 0 J + ∇ × M ⇒ ∇ × B − µ 0 M = µ 0 J ⇒ ∇ × ⎜⎜
23.
⎟
µ
0
⎝
⎠
r
quindi, chiamando vettore campo magnetico H la quantità:
r
r
r B − µ0 M
H=
24.
(
)
(
)
µ0
le equazioni di Maxwell prendono la seguente forma:
r r
r r r
25.
∇⋅ B = 0 ; ∇× H = J
nelle quali compaiono solo correnti macroscopiche, ed inoltre sono molto simile alle
relazioni ricavate nel caso dell’elettrostatica.
L’introduzione di questo nuovo campo vettoriale, opportunamente pensato per
descrivere i fenomeni di magnetizzazione, comporta la successiva derivazione di una
r
formula integrale che descriva il comportamento di H .
r
Supponiamo di avere un filo in cui circola una corrente di densità J , prendiamo una linea
r
chiusa l e calcoliamo il flusso di J attraverso una superficie S di cui l è il contorno:
r
r r
r r
J ⋅ dS = ∇ × H ⋅ dS
26.
∫
∫(
S
)
S
applicando il teorema di Stokes sulla linea l si ottiene
r
r r
r r
∇ × H ⋅ dS = H ⋅ dl
∫(
)
S
∫
27.
l
A questo punto dalla quarta equazione di Maxwell nel caso stazionario e dal teorema della
circuitazione di Ampere ricaviamo una relazione di spiccata utilità:
r r
r r
⎧ r r r
r r
r
µ
∇
×
B
d
S
=
B
⋅
d
l
=
J
⋅ dS
0
⎧∇ × B = µ 0 J
⎪
⎪⎪
⎪⎪ S
l
S
r
⇒⎨
⎨ Br ⋅ dl = µ
Ii
r
r
0
⎪
⎪ B ⋅ dl = µ
i
Ii
0
⎪
⎩⎪ l
i
28.
⎪⎩ l
⇓
r r
J ⋅ dS =
Ii
∫
∫(
∫
∑
∫
∑
)
∫
∑
∫
i
S
Possiamo, quindi concludere dicendo che:
r r
H ⋅ dl =
∫
∑
i
Ii
29.
l
la quale prende il nome di teorema della circuitazione di Ampere per il vettore campo
r
magnetico H .
77
Massimiliano Carfagna
Magnetismo nella materia
VI.5. Condizioni al contorno per le eq.ni di Maxwell
Le equazioni di Maxwell, così come sono state scritte nel precedente paragrafo, non
sono valide in presenza di interfacce di separazione tra mezzi materiali. Infatti, quando si
passa da un mezzo materiale ad un altro, il campo magnetico subisce una discontinuità. Per
determinare le condizioni al contorno che ci permetteranno di risolvere in maniera univoca le
r
eq.ni di Maxwell risulta necessario applicare due proprietà integrali dei campi vettoriali B
r
ed H .
Prendiamo una interfaccia di separazione tra i due mezzi e costruiamo su essa una
superficie cilindrica di area di base dS orientata ortogonalmente alla normale alla superficie
di separazione n̂ , i cui lati del cilindro siano di un ordine di infinitesimo maggiore rispetto
r
r r
alle dimensioni lineari delle basi. Dato che il campo vettoriale B è solenodiale ( ∇ ⋅ B = 0 )
allora il flusso uscente da una qualsiasi superficie chiusa è nullo, in quanto ricordiamo che,
dal teorema di Stokes si ha:
r
r r
r r
Φ S B = B ⋅ dS = ∇
⋅ B ⋅ dτ = 0
{
30.
()
∫
∫
τ
S
0
quindi possiamo calcolare il flusso elementare che fuoriesce dalla superficie cilindrica,
trascurando però il flusso uscente dalle pareti laterali (in quanto abbiamo supposto essere di
un ordine di infinitesimo maggiore rispetto alle dimensioni lineari delle basi), si ha quindi
che:
r
r
r
r
r
Φ S B = B1 dS ⋅ nˆ1 + B2 dS ⋅ nˆ 2 = B1 ⋅ nˆ − B2 ⋅ nˆ dS = (B1,n − B2,n )dS = 0
()
(
B1,n
)
⇓
= B2 , n
31.
dunque la componente normale del campo di induzione magnetica si conserva nel passaggio
tra due mezzi.
r
A questo punto concentriamoci sul vettore campo magnetico H ; supponiamo di
voler calcolare la sua circuitazione lungo un rettangolo R chiuso posto a cavallo
dell’interfaccia di separazione tra i due mezzi. Possiamo notare che, se supponiamo che
all’interno del rettangolo non ci siano correnti macroscopiche ( Σ i I i = 0 ) allora la
circuitazione è nulla, ovverosia:
r r
H ⋅ dl = 0
32.
∫
R
Nell’ipotesi che i lati minori del rettangolo siano di un ordine di infinitesimo maggiore
rispetto alle dimensioni lineari dei lati paralleli all’interfaccia, è possibile scrivere il
contributo elementare per ogni lato trascurando il contributo dei lati minori; avremo quindi
che:
78
Massimiliano Carfagna
Magnetismo nella materia
∫
R
r r
H ⋅ dl =
∫
r
H 1 ⋅ dl ⋅ tˆ1 +
(1)
∫
r
H 2 ⋅ dl ⋅ tˆ2 =
( 2)
∫
(1)
r
H 1 ⋅ tˆ ⋅ dl −
∫
r
H 2 ⋅ tˆ ⋅ dl = 0
( 2)
⇓
∫
(1)
H 1,t ⋅ dl −
∫
H 2,t ⋅ dl = 0 ⇒ (H 1,t − H 2,t )dl = 0
33.
( 2)
⇓
H 1,t = H 2,t
ne segue che la componente tangente del vettore campo magnetico si conserva nel passaggio
tra due mezzi.
Da evidenze sperimentali risulta che se il materiale è omogeneo ed isotropo il vettore
r
r
B ed il vettore H sono tra loro paralleli (o antiparalleli) e proporzionali in modulo di una
quantità µ detta permeabilità magnetica, quindi:
r
r
34.
B = µ⋅H
Per comodità la costante di permeabilità magnetica viene spesso scritta come proporzionale
alla costante µ 0 , e la costante di proporzionalità viene indicata con il nome di costante di
permeabilità magnetica relativa µ r , la quale, così come accade per µ , dipende dal mezzo in
cui ci si trova, per cui possiamo scrivere che µ = µ r ⋅ µ 0 .
Dalle ultime relazioni, è possibile ricavare l’espressione delle componenti, rispettivamente,
r
r
tangenti e normali dei vettori B ed H :
Bn = µ r µ 0 ⋅ H n ⇒ µ1,r ⋅ H 1,n = µ 2 ,r ⋅ H 2 ,n
B
B
Bt
⇒ 1,t = 2 ,t
µrµ0
µ1,r µ 2 ,r
quindi in definitiva le condizioni al contorno possono essere scritte come:
⎧ B1,n = B2 ,n
⎧ H 1,t = H 2 ,t
⎪
⎨ B1,t B2 ,t ; ⎨
⎩µ1,r ⋅ H 1,n = µ 2 ,r ⋅ H 2 ,n
⎪µ = µ
2 ,r
⎩ 1,r
Ht =
35.
36.
VI.6. Permeabilità magnetica e sucettività magnetica
La costante µ r appena introdotta ha alcune caratteristiche di rilievo fanno, di essa, un
parametro di largo interesse fisico.
Come prima cosa dobbiamo dire che nelle sostanze diamagnetiche e paramagnetiche
r
la µ r è costante ed è indipendente dal campo di induzione magnetica B , inoltre, in questi
materiali, il suo valore è prossimo ad 1.
Nei materiali ferromagnetici, invece la permeabilità magnetica relativa è strettamente
dipendente dal campo magnetico, e con essa, ovviamente, anche la permeabilità µ , quindi,
79
Massimiliano Carfagna
Magnetismo nella materia
in queste sostanze, scriveremo che µ = µ (B ) .
Per indagare a fondo queste proprietà dei materiali è utile introdurre un parametro
r
(peraltro già usato nel caso dei dielettrici) che relaziona il vettore campo magnetico H con il
r
vettore polarizzazione magnetica M , infatti ricordando la:
r
r
r B − µ0 M
H=
37.
µ0
r
r
è possibile sostituire in essa l’espressione B = µ r µ 0 H , cosicché si avrà:
r
r
r
r r
r
r
r µ r µ0 H − µ0 M
H =
⇒ H = µ r H − M ⇒ M = (µ r − 1)H
µ0
⇓
38.
r
r
M = χm H
nella quale la quantità
χ m = µr − 1
39.
Prende il nome di suscettività magnetica del materiale. Da notare che tutto ciò ha validità
nell’ipotesi che i materiali siano omogenei ed isotropi, in quanto, se ciò non accade, allora
sia la permeabilità magnetica, sia la suscettività non sono più delle costanti ma dei tensori.
Nel seguito studieremo in dettaglio il comportamento di ognuna delle tre sostanze, ma prima
è necessario un tuffo nel modo microscopico per avere gli strumenti necessari a capire ciò
che si dirà nei prossimi paragrafi.
VI.7. Precessione di Larmor
È stato detto che a livello microscopico ogni singolo atomo produce un momento magnetico
r
elementare m 0 che provoca la magnetizzazione del materiale in questione. È stato anche
detto che, per essere più precisi, il momento magnetico agente su ogni atomo non è
r
solamente m 0 , ma c’è anche una componente derivante dal moto proprio dell’elettrone su se
stesso, ovverosia il momento magnetico di spin. A questo punto dobbiamo aggiungere una
terza componente che agisce sul momento magnetico totale dell’atomo, detto momento
r
magnetico di Larmor m L , cosicché ogni singolo atomo avrà un momento magnetico totale
dato dalla somma vettoriale di queste tre componenti:
r r
r r
m = m0 + s + m L
40.
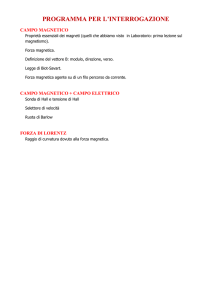
Questo momento magnetico deriva dal moto di precessione che si instaura quando
r
l’atomo è sottoposto ad un campo magnetico locale Bl .
Supponiamo, infatti, di avere un atomo la cui normale nˆ al piano dell’orbita formi un angolo
r
θ con la direzione del campo magnetico locale Bl . Dall’analisi fatta in precedenza
sappiamo che il momento magnetico dell’elettrone può essere scritto come:
r
e r
⋅L
m0 = −
41.
2me
r
in cui L è il momento angolare dell’elettrone calcolato rispetto al nucleo.
80
Massimiliano Carfagna
Magnetismo nella materia
r
Possiamo, ora, calcolare il momento della forza (generata dal campo magnetico locale) M
ricordando che:
r
r
r
r
e r r
dL
M = m0 × Bl = −
⋅ L × Bl =
42.
2me
dt
per la II eq.ne cardinale della meccanica dei sistemi. La relazione appena ricavata
r
r
rappresenta la precessione del momento angolare L attorno alla direzione di Bl ; essa prende
il nome di precessione di Larmor. A questo punto, ricordando la formula di Poisson
(memorie di Meccanica dei Sistemi) è possibile ricavare la velocità angolare del moto di
precessione:
r
r
⎧ dL r
= ωL × L
⎪
r
e r
⎪ dt
Bl
⇒ ωL =
43.
⎨ r
r r
2me
⎪ dL = e B × L
⎪⎩ dt 2me l
in cui, nella seconda delle due equazioni del sistema, si è invertito l’ordine del prodotto
scalare e si è cambiato di segno (proprietà del prodotto scalare). La velocità di precessione
r
risulta essere parallela al vettore Bl .
Una volta nota la velocità angolare possiamo calcolare facilmente il momento magnetico
provocato da questo ulteriore moto al quale è sottoposta la carica. Infatti la precessione
genera una componente di moto (ulteriore alla rotazione dell’elettrone attorno la nucleo) il
quale a sua volta genera, sulla traiettoria descritta dalla precessione di Larmor, una corrente
ulteriore chiamata corrente di Larmor e data dalla:
ω
e 2 BL
e
= e⋅ L =
IL =
44.
TL
2π 4πme
Il momento di Larmor, quindi, si calcola come il momento della spira percorsa da corrente,
con l’unica variante che l’area della spira è rappresentata dalla proiezione dell’area
r
dall’orbita dell’elettrone sul piano ortogonale al vettore Bl , che indicheremo con S z .
Quest’area può essere scritta in funzione delle coordinate dell’elettrone, come
S z = π x 2 + y 2 , in cui x 2 e y 2 rappresentano il valore quadratico medio delle coordinate
x ed y dell’elettrone. Se l’atomo è ridistribuito isotropicamente nello spazio, si ha che
x 2 = y 2 = z 2 = (1 3)r 2 , dove r è il raggio dell’orbita. Utilizzando tutte queste informazioni
possiamo scrivere l’espressione esplicita del momento di Larmor:
r
2
e 2 BL
e 2 BL
e2r 2 r
⋅ π (x 2 + y 2 ) ⋅ kˆ = −
⋅ π ⋅ r 2 ⋅ kˆ = −
mL = I L ⋅ S z ⋅ kˆ = −
BL
4πme
4πme
3
6me
(
)
⇓
45.
r
e2r 2 r
mL = −
BL
6me
nella quale si è aggiunto il segno meno in quanto la corrente circolo in verso opposto
r
all’elettrone, ed inoltre si è imposto che Bl = Bl ⋅ kˆ .
81
Massimiliano Carfagna
Magnetismo nella materia
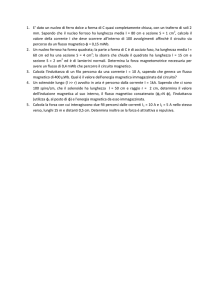
z
r
Bl
Sz
ϑ
r
ωL
k̂
e
IL
n̂
−
y
r
mL
x
r
L
r
r
Precessione di Larmor
r
m0
VI.8. Funzione di Langevin
Nel caso di sostanze paramagnetiche e ferromagnetiche l’interpretazione
microscopica dei fenomeni prevede l’introduzione di una funzione, detta funzione di
r
Langevin, che descrive quantitativamente il momento magnetico proprio medio m0
associato ad ogni elemento di volume del materiale.
Per ricavare questa funzione è necessario scomodare dobbiamo pensare che in
r
presenza di un campo magnetico locale Bl ogni atomo, che possiede un momento magnetico
r
r
r
r
proprio m 0 , è sottoposto ad un momento meccanico M mecc = m 0 × Bl che tende ad orientarlo
r
come Bl . L’agitazione termica presente nel materiale, invece, favorisce l’orientamento
casuale degli atomi, e quindi anche dei momenti magnetici propri. In definitiva l’equilibrio
tra queste due tendenze è descritto dalla funzione di Boltzmann seguente:
−
m0 Bl cos θ
KT
U
KT
46.
dP = A ⋅ e dΩ = A ⋅ e
2π sin θdθ
scritta in forma elementare, nella quale A è una constante di normalizzazione, U è l’energia
dell’atomo (scritta come l’energia di un dipolo, in quanto l’atomo è assoggettato ad una spira
percorsa da corrente e, per il teorema di equivalenza di Ampere, la spira è equivalente al
dipolo elettrico), K è la costante di Boltzmann e T è la temperatura. In effetti la funzione
r
dP appena scritta rappresenta la probabilità che il momento magnetico proprio m 0 sia
orientato entro un angolo solido d Ω , ed è grazie a questa interpretazione che è possibile
82
Massimiliano Carfagna
Magnetismo nella materia
ricavare il valore della costante A , semplicemente imponendo che l’integrale in dP sia
uguale all’unità (che corrisponde alla certezza, dal punto di vista probabilistico), ossia:
1
A = π m B cos θ
0 l
47.
e KT 2π sin θdθ
∫
0
Se il materiale è isotropo il problema assume simmetria cilindrica attorno alla
r
r
direzione di Bl , e quindi l’unica componente di m 0 diversa da zero è quella parallela al
campo locale; possiamo quindi scrivere che:
r
r
m0 ≡ m0 , Brl =
∫
π
m0 cos θe
m0 Bl cos θ
KT
2π sin θdθ
0
∫
π
e
m0 Bl cos θ
KT
48.
2π sin θdθ
0
Gli integrali appena ricavati si risolvono imponendo le seguenti sostituzioni:
r
r m0 Bl
y=
; x = cosθ
KT
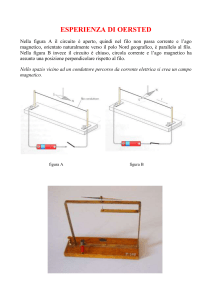
e la soluzione è la cosiddetta funzione di Langevin L ( y ) :
49.
⎛
r
1⎞
m0 = L( y ) = m0 ⎜⎜ coth y − ⎟⎟
y⎠
⎝
la quale ha l’andamento mostrato nella figura seguente:
50.
Funzione di Langevin
VI.9. Sostanze diamagnetiche e paramagnetiche
In questo paragrafo si cercherà di riassumere le caratteristiche fondamentali dei
materiali dia- e para- magnetici, anche alla luce di quanto affermato dal punto di vista
microscopico.
Le sostanze sono state classificate come diamagnetiche allorché, inserendo un
pezzetto di questo materiale all’interno di un campo magnetico, esso veniva debolmente
83
Massimiliano Carfagna
Magnetismo nella materia
respinto da esso.
L’interpretazione macroscopica di questo fenomeno è giustificata dal fatto che alle
sostanze diamagnetiche è associata una permeabilità magnetica relativa minore dell’unità,
quindi la suscettività è negativa. La conseguenza di ciò è che il momento della forza
r
r
magnetica M è diretto in verso opposto al campo inducente B . Questa affermazione si
giustifica matematicamente con i seguenti passaggi:
r
r
r
r
r
⎧ r B − µ0 M
B
B
−
µ
M
0
r
r
=
⎪H =
µ0
(
)
⇒ µ/ 0 µr
⇒
µ
µ
M
=
µ
−
1
B
51.
µ
⎨
0
r
r
/0 r
123
r
r
r r
⎪
χm
B = µ r B − µ0 µ r M
⎩µ0 µ r H = B
r
r
È dunque evidente che se µ r < 1 allora χ m < 0 , quindi, dato che µ0 µ r > 0 si ha che M e B
sono antiparalleli.
Dal punto di vista microscopico i materiali diamagnetici sono formati da atomi che
r
non posseggono un momento magnetico proprio m0 , dunque per essi la magnetizzazione
deriva unicamente dalla precessione di Larmor, ossia
Z
r
nZe 2 a 2 r
1
r
2
M = n ⋅ mL = −
BL con a =
ri 2
52.
Z
6me
∑
i =1
A differenza delle sostanze paramagnetiche e ferromagnetiche, le sostanze
diamagnetiche non presentano dipendenza dalla temperatura nella suscettività magnetica, ciò
r r
r
vuol dire che tutte le relazioni che legano i vettori B , H ed M restano di pura
proporzionalità (ossia χ m ≠ χ m (T ) ).
Le sostanze paramagnetiche, invece, allorché vengano poste in un campo magnetico,
vengono debolmente attratte da esso.
L’interpretazione macroscopica del comportamento di queste sostanze deriva dal
fatto che ad esse è associata una permeabilità magnetica relativa maggiore di uno, ciò
comporta che la suscettività magnetica è anch’essa positiva. Questo vuol dire che il vettore
r
induzione magnetica B ed il vettore intensità di magnetizzazione sono tra loro paralleli ed
omologhi in verso, infatti possiamo notare che:
r ⎛ µ −1⎞ r
µ r > 1 ⇒ χ m > 0 ⇒ M = ⎜⎜ r ⎟⎟ B
53.
µ0 µ r ⎠
⎝1
42
4
3
>0
Dal punto di vista microscopico possiamo dire che gli atomi delle sostanze
r
paramagnetiche possiedono un momento magnetico proprio m0 (a differenza delle sostanze
diamagnetiche), per cui il vettore magnetizzazione viene calcolato mediante la funzione di
Langevin sopra introdotta ed un’altra condizione riguardante il valore locale del campo
r
r
magnetico locale H l . Il termine mL derivante dalla precessione di Larmor, in questo caso,
come nel caso ferromagnetico, viene trascurato, in quanto è molto inferiore al momento
proprio.
A diffrenza delle sostazne diamagnetiche, per i materiali paramagnetici la suscettività
magnetica χ m varia con la temperatura secondo la legge di Curie:
84
Massimiliano Carfagna
Magnetismo nella materia
C⋅ρ
54.
T
Nella quale C è una costante, ρ è la densità del materiale e T è la temperatura. Risulta
quindi evidente che se la temperatura decresce allora aumenta la suscettività dei materiali
paramagnetici. Ciò dimostra che non c’è più linearità tra magnetizzazione e campo
r r
r
magnetico, quindi non valgono più le relazioni di proporzionalità tra B , M E H . In
condizioni TPS (temperatura e pressione standard), però, la proporzionalità può essere
approssimativamente mantenuta, in quanto le perturbazioni possono considerarsi
trascurabili.
χm =
VI.10.
Sostanze ferromagnetiche (isteresi)
Per le sostanze ferromagnetiche si raggiunge un grado di complessità del fenomeno
pressocché massima. Infatti, si è visto che nel caso di sostane paramagnetiche il
comportamento del materiale varia a seconda della temperatura, cosicché non viene
rispettata le relazioni di linearità tra magnetizzazione e campo magnetico.
Per le sostanze ferromagnetiche la magnetizzazione non solo è rappresentata da
relazioni non lineari, ma soprattutto queste relazioni non sono univoche. Con questo si vuole
r
r
dire che la relazione che lega B ad H non è sempre la stessa. La conseguenza di questo
fatto è che la permeabilità magnetica di sostanze ferromagnetiche è variabile a seconda dei
r
r
valori di B e di H .
La variazione di permeabilità magnetica µ nei materiali ferromagnetici può essere
r
r
analizzata studiando cosa accade al variare di H e di Br , infatti ricordiamo che:
r
r
B
55.
B = µH ⇒ µ = r
H
Nell’ipotesi in cui il materiale sia isotropo e abbia intensità di magnetizzazione pari a zero
(smagnetizzato) possiamo scrivere che:r
r
r B − µ0 M M = 0 r r
H =
⇒ H =B
56.
µ0
Questo vuol dire che possiamo abbandonare la notazione vettoriale in quanto H e B
assumono la stessa direzione.
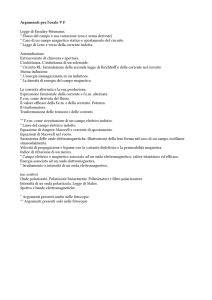
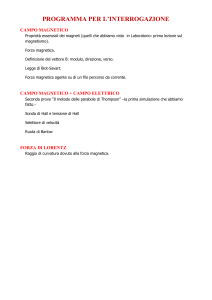
Sperimentalmente si ricava una curva B = B (H ) che lega la variazione di campo
magnetico alla variazione di induzione magnetica nei materiali ferromagnetici e questa curva
è detta curva di isteresi. Il suo andamento è rappresentato in figura:
B
Bm
Br
− H m− H s
− Hc
Hc
Ciclo di isteresi
− Bm
85
Hs Hm H
Massimiliano Carfagna
Magnetismo nella materia
A questo punto passiamo all’analisi della curva in dettaglio.
Tratto (0 0 ) → (H m Bm ) : curva di prima magnetizzazione. Partendo dall’origine
degli assi (sostanza smagnetizzata) si fa aumentare il campo H ; ciò provoca un aumento di
B che segue l’andamento mostrato in figura, fino a raggiungere un massimo per il valore
H = H m . La relazione che lega B ad H può essere scritta in due modi:
r
r
r
r
r
B = µH oppure B = µ 0 M + µ 0 H
57.
Da ciò possiamo dire che quando H raggiunge il valore di H m (quindi anche B è massimo)
si dice che il valore di intensità di magnetizzazione ricavato dalla seconda delle (57) prende
il nome di valore di saturazione M s . In corrispondenza di questo valore la magnetizzazione
è pressoché totale (ogni momento magnetico elementare è orientato parallelamente al campo
r
r
di induzione magnetica B o al suo parallelo H ).
Tratto (H m Bm ) → (0 Br ) : induzione magnetica residua. A questo punto si
procede con la diminuzione del campo H , e si osserva B segue, per un tratto molto piccolo,
la curva precedente, fino a che il campo H non assume valore pari a H s . Per valori minori
di H s la curva prosegue nella sua discesa ma resta inevitabilmente al di sopra della curva di
prima magnetizzazione. Quando H viene portato al valore nullo si verifica che il campo di
induzione magnetica non è nullo, ma assume il valore positivo indicato con Br , detto
induzione magnetica residua. In virtù della seconda delle (57), quando H = 0 allora
Br = µ0 M e dunque il valore di M così ottenuto si chiama magnetizzazione residua M r .
Tratto (0 Br ) → (− H m − Bm ) : campo magnetico di coercizione. Ora è possibile
invertire il segno al campo H e facciamo crescere il modulo. Si osserva che B tende a
diminuire fino ad annullarsi. Quando ciò accade si ha, ovviamente, che:
B = 0 ⇒ µ0 M + µ0 H = 0 ⇒ M = H
58.
Quindi la magnetizzazione, in questo caso è uguale al valore di H e quest’ultimo è dettp
campo magnetico di coercizione H c . Continuando ad aumentare il modulo di H il campo di
induzione magnetica continua a diminuire fino a raggiungere, in prossimità di − H m , il
minimo valore.
Tratto (− H m − Bm ) → (H m Bm ) : ciclo di isteresi. Facendo variare H con
continuità nell’intervallo [− H m H m ] la curva di isteresi si chiude con un tratto simmetrico
rispetto all’origine al tratto (H m Bm ) → (− H m − Bm ) . La curva chiusa che ne deriva
prende il nome di ciclo di isteresi.
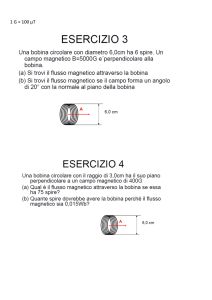
A questo punto è utile chiedersi cosa succederebbe se, invece di invertire il segno di
H in prossimità di H m , lo si invertisse per un valore H 1 < H m . Si verifica
sperimentalmente che si ottiene un ciclo qualitativamente simile a quello descritto finora, ma
“più piccolo”, così come avviene nella figura che segue:
86
Massimiliano Carfagna
Magnetismo nella materia
B
H
Cicli di isteresi consecutivi
Si riscontra, inoltre, che, facendo variare H su intervalli via via minori, con
continuità, i cicli di isteresi tendono alla posizione (0 0 ) e ciò vuol dire, in pratica, che si è
passati da un materiale che inizialmente aveva una certa intensità di magnetizzazione, ad un
materiale con magnetizzazione nulla (ovverosia si è eseguito un processo di
smagnetizzazione), come si può notare in figura:
B
H1
Hm
H
Smagnetizzazione
Dalle precedenti esperienze possiamo quindi dedurre che, per i materiali
ferromagnetici, la permeabilità è un parametro che perde gran parte del suo significato e
r
r
soprattutto, per via della B = µH , non è possibile neanche determinare univocamente il
r
r
valore di B (per un H fissato) in quanto è necessario sapere su quale ramo di quale cilco di
isteresi ci troviamo (analiticamente si può dire che la funzione B = B (H ) è polidorma: per
un valore di H si hanno più valori di B ).
Sempre da evidenze sperimentali, inoltre, si riscontra che al di sopra di una certa
temperatura critica TC un materiale ferromagnetico si comporta come un materiale
paramagnetico, seguendo la cosiddetta legge di Curie - Weiss
C⋅ρ
χm =
59.
T − TC
È possibile aggiungere che le sostazne ferromagnetiche che posseggono un ciclo di
isteresi molto “stretto” possono essere considerate come delle sostanze paramagnetiche,
ossia si trascura l’isteresi del materiale.
87
Massimiliano Carfagna
Magnetismo nella materia
Da tutte le evidenze sperimentali sopra elencate si evincono le seguenti
considerazioni:
1. nei materiali ferromagnetici, come si è detto all’inizio del paragrafo, la
permeabilità magnetica µ non è costante;
2. nei materiali ferromagnetici, per H fissato, µ dipende dalla “storia” del
materiale, ovverosia dal tipo e dal numero di magnetizzazioni (e quindi di
cicli di isteresi) che la sostanza in questione ha subito.
3. la temperatura influisce sui materiali ferromagnetici tanto da far sì che il loro
comportamento sia simile a quello dei materiali paramagnetici.
VI.11.
Circuiti magnetici.
Per circuito magnetico si intende una successione di elementi Ei di materiale
ferromagnetico, le cui sezioni normali S i sono piccole rispetto alle lunghezze dei singoli
elementi li , la cui configurazione geometrica sia chiusa a meno di piccoli spazi, detti traferri
o interferri, in cui è presente un materiale non ferromagnetico (come l’aria, ad esempio).
Attorno ad una parte di uno o più elementi deve essere avvolto un filo percorso da corrente
I stazionaria detto avvolgimento di eccitazione.
È necessario precisare che, per via della non univocità di comportamento del
materiale ferromagnetico, non è possibile stabilire una teoria molto dettagliata circa i circuiti
magnetici, ma, facendo l’ipotesi di conoscere il ciclo di isteresi del materiale usato per il
circuito, è possibile ricavare un metodo abbastanza generale per la risoluzione dei circuiti
stessi.
Il circuito di riferimento più semplice è un anello di materiale ferromagnetico, che
non presenta traferri, attorno al quale sono avvolte N spire in cui circola la corrente I .
r
Calcoliamo su di esso il flusso del vettore induzione magnetica B , che sappiamo essere
nullo, essendo la superficie di riferimento Σ chiusa (vedi figura):
∫
r r
B ⋅ dS = 0 ⇒
Σ
∫
∫
S1
−
∫
S '1
r r
B ⋅ dS +
∫
S2
r r
B ⋅ dS +
∫
r r
B ⋅ dS +
S3
∫
S4
r r
B ⋅ dS ≅
∫
S1
r r
B ⋅ dS +
∫
r r
B ⋅ dS = 0
S3
r r
r r
B ⋅ dS '+ B ⋅ dS = 0 ⇒ − B1S1 + B2 S 2 = 0 ⇒ B1S1 = B2 S 2 ⇒ Φ = BS
60.
S3
nella quale si è trascurato il flusso uscente dalle superfici laterali di Σ . Dalla (60) si deduce,
quindi, che il flusso è costante, e dunque, noto Φ è possibile ricavare B .
88
Massimiliano Carfagna
Magnetismo nella materia
A questo punto, se è noto il ciclo di isteresi del materiale, è anche possibile sapere il
r
r
valore di µ , mediante la B = µH . A questo punto, ricordando che
r r
H ⋅ dl = NI
61.
∫
l
Possiamo scrivere che:
∫
r r
H ⋅ dl =
∫
r
B
r
⋅ dl =
∫
∫
∫
Φdl
dl
=Φ
62.
µ
µ
µS
µS
l
l
l
l
l
r
r
r r
Nella quale si è usato il fatto che B è parallelo a dl (e quindi B ⋅ dl = Bdl ), ed inoltre che
il flusso, essendo costante, può essere tirato fuori dall’integrale.
Definiamo, ora, le seguenti quantità:
F = NI forza magnetomotrice
NI =
R=
∫
dl
µS
Bdl
riluttanza
=
63.
l
quindi possiamo scrivere la (62) nella forma:
64.
F = RΦ
che prende il nome di legge di Hokinson. Essa è valida sempre se il ciclo di isteresi è molto
r
sterro, altrimenti il ciclo di isteresi deve essere noto, affinché, per H assegnato, si possa
conoscere il corrispettivo valore di µ .
La riluttanza è una quantità che in un circuito magnetico molto semplice, la cui
sezione S è piccola rispetto alla lunghezza totale del circuito, assume la forma seguente:
l
R=
65.
µS
questo vuol dire che:
1. note le dimensioni geometriche del circuito;
2. noto il ciclo di isteresi e il corrispettivo valore di µ ;
3. nota la corrente che passa nell’avvolgimento e il numero di spire
è possibile ricavare il flusso Φ e da esso ricavare il campo magnetico sviluppato dal
circuito.
In analogia con il caso elettrico, per la riluttanza, è possibile scrivere relazioni simili
alle resistenze in serie ed in parallelo, infatti si ha che:
1. se gli elementi del circuito sono disposti in serie, essi sono attraversati tutti
dallo stesso flusso, ne segue che la riluttanza complessiva sarà data dalla
somma delle riluttanze:
RS = ∑i Ri
66.
2. se gli elementi del circuito sono disposti in parallelo, allora vale la condizione
che la somma algebrica dei flussi entranti nel nodo sia nulla, e quindi la
riluttanza complessiva è legata alle singole riluttanze dalla
⎛1⎞
1
= ∑ i ⎜⎜ ⎟⎟
67.
RP
⎝ Ri ⎠
89
Massimiliano Carfagna
Magnetismo nella materia
VI.12.
Elettromagneti
Un elettromagnete è un circuito magnetico che possiede le seguenti caratteristiche:
1. nucleo di materiale ferromagnetico
2. ciclo di isteresi molto stretto
3. traferro eseguito lungo una sezione normale S0 e di spessore d molto piccolo
rispetto alle dimensioni lineari della sezione (condizione necessaria e
sufficiente affichè il flusso disperso lateralmente – effetti di bordo – si
mantenga trascurabile rispetto al flusso totale)
In queste condizioni si utilizza la legge di Hopkinson per risolvere il circuito, tenendo
presente che anche il tra ferro possiede una sua riluttanza che sarà data dalla
d
Rtraferro =
68.
µ0 S0
nell’ipotesi che il tra ferro sia riempito d’aria ( µ r = 1 ). In queste condizioni la soluzione del
circuito è eseguita come già si è discusso nel paragrafo precedente, ossia mediante la:
N ⋅I
F = RTOT Φ = RTOT BS ⇒ B =
69.
RTOT ⋅ S
in cui RTOT comprende tutte le riluttanze in serie ed in parallelo (quindi anche quella del
traferro), ed S è la sezione (supposta costante) del circuito.
In realtà è possibile risolvere il circuito anche quando l’ipotesi 2 non è verificata,
ovverosia quando il ciclo di isteresi non è stretto, ma è noto. Per farlo si procede per via
grafica. In questo caso, infatti, si può scrivere che:
r r
H ⋅ dl = {
H ⋅ l + H0 ⋅ d = N ⋅ I
70.
123
∫
sul nucleo
sul traferro
in quanto nel traferro non c’è materiale ferromagnetico e quindi si introduce il campo
r
r
magnetico nel vuoto. Ricordando le condizioni di raccordo del vettore B e del vettore H ,
possiamo osservare che nel traferro il campo di induzione magnetica è uguale al valore che
assume nel materiale, ovverosia
r r
B = B0
71.
In quanto sappiamo che nel passaggio tra due mezzi la componente normale del campo di
r
induzione magnetica si conserva. Dato che, in questo caso, il campo B nel materiale non ha
r
componente tangente, allora vale la (71). Per il campo magnetico H invece, non è così,
infatti si ha che:
r
r
r
r
B0
B
H0 =
; H=
72.
µ0
µ0 µ r
1424
3
1
424
3
nel traferro
nel nucleo
Sostituendo la (71) nella (72) e la prima delle (72) nella (70) si ottiene la seguente relazione:
Bd
N ⋅ I ⋅ µ0 H ⋅ l ⋅ µ0
−
N ⋅ I = H ⋅l +
⇒ N ⋅ I ⋅ µ0 = H ⋅ l ⋅ µ0 + Bd ⇒ B =
73.
d
d
µ0
90
Massimiliano Carfagna
Magnetismo nella materia
la quale, nel piano (B, H ) , è l’equazione di una retta a coefficiente angolare negativo. A
questo punto, per ottenere il valore del campo di induzione magnetica, e risolvere, quindi, il
circuito, basta semplicemente fare il sistema con la funzione B = B (H ) del ciclo di isteresi; i
p.ti di intersezione saranno i valori di B cercati:
l ⋅ µ0
N ⋅ I ⋅ µ0
⎧
⋅H +
⎪B = −
d
d
74.
⎨
⎪⎩ B = B(H )
B
B = B (H )
µ 0 NI
d
B
H
Retta di carico dell’elettromagnete
VI.13.
Magneti permanenti
Un materiale ferromagnetico che possiede un ciclo di isteresi molto largo (alto valore
di magnetizzazione residua M r ) ed il cui nucleo possiede un momento magnetico proprio,
nel momento in cui viene sottoposto ad un particolare processo di magnetizzazione, viene
detto magnete permanente.
Supponiamo, quindi, di prendere il solito circuito magnetico toroidale lungo l con un
piccolo traferro di lunghezza d . Supponiamo che esso sia inizialmente smagnetizzato e che
mediante un avvolgimento di eccitazione, facciamo compiere al materiale la curva di prima
magnetizzazione del suo ciclo di isteresi. Supponiamo, inoltre, di giungere al punto di
saturazione S del ciclo di isteresi (ossia aumentiamo la corrente nell’avvolgimento tanto da
arrivare a produrre, nel materiale, un campo magnetico massimo H m . A questo punto
eliminiamo l’avvolgimento ed osserviamo cosa accade: il campo magnetico H all’interno
del materiale decresce, mantenendosi sempre al di sopra della curva di prima
magnetizzazione, seguendo il suo ciclo di isteresi. Esso si fermerà in un punto (H L BL )
posto nel secondo quadrante, il quale può essere ricavato per via grafica intersecando la retta
di carico con la curva di isteresi del materiale.
Per ricavare l’equazione della retta di carico procediamo come nel precedente
paragrafo, ma in questo caso dobbiamo tener conto che, avendo eliminato l’avvolgimento, le
correnti concatenate sono nulle, per cui:
91
Massimiliano Carfagna
Magnetismo nella materia
∫
r r
d
B d
H ⋅ dl = {
H ⋅ l + H0 ⋅ d = 0 ⇒ H = −H0 ⋅ = − 0 ⋅
123
l
µ0 l
sul nucleo
sul traferro
⇓
B=−
75.
µ 0l
H
d
dalla quale si evince che la retta di carico, a coefficiente negativo, passa per l’origine. Il
valore di B per il quale si ha la magnetizzazione (permanente) si ricava, per via grafica,
mediante il sistema:
µ 0l
⎧
H
⎪B = −
d
76.
⎨
⎪⎩B = B(H )
B
S
B = B (H )
BL
HL
B=−
µ 0l
d
H
H
Retta di carico del magnete permanente
Il valore di magnetizzazione corrispondente si ricava, invece, con la
B − µ0 H L
M = L
µ0
77.
La relazione (76), descrive come varia il campo di induzione magnetica al variare del
campo magnetico all’interno del magnete, in assenza di correnti esterne (e dunque è una
situazione piuttosto generale, relativa a qualsiasi materiale magnetico). Si può confrontare la
prima delle (76) con la prima delle (72):
B
B d
H0 =
; H =− ⋅
78.
µ0
µ0 l
Da questo confronto traiamo le seguenti considerazioni:
1. mentre B = B0 , ossia non subisce discontinuità nel passaggio dal nucleo al
traferro, il vettore H subisce una discontinuità, nel senso che varia il suo
modulo;
2. Oltre alla variazione del modulo, nel passaggio dal nucleo al traferro il
campo magnetico inverte il segno, ovverosia l’orientazione che esso possiede
92
Massimiliano Carfagna
Magnetismo nella materia
al di fuori del nucleo è opposta a quella che possiede all’interno.
B ≡ B0
H0
H
Discontinuità del campo magnetico
93
Campi variabili nel tempo
Massimiliano Carfagna
VII. Campi variabili nel tempo
VII.1.
Premessa
Nei precedenti capitoli si è sempre pensato che, a meno di fenomeni particolari
quali la forza di Lorentz, il campo elettrico e il campo magnetico fossero due entità
disaccoppiate. Tant’è che ciò poteva evincersi anche dalle equazioni di Maxwell nel caso
stazionario:
r r
r r
(I ) ∇r ⋅ Dr= ρ ; (II) ∇r ⋅ B r= 0 r
79.
(III) ∇ × E = 0 ; (IV ) ∇ × H = J
Infatti le precedenti equazioni differenziali risultano essere disaccopiate, in quanto in
ognuna di essa compare solo il termine magnetico o solo il termine elettrico ma non
entrambi. Vedremo tra un attimo che in realtà non è così: in presenza di fenomeni non
stazionari le equazioni di Maxwell diventano accoppiate.
Questo fatto non è altro che la conseguenza teorica di ciò che avviene fisicamente:
r
r
E e B non possono considerarsi grandezze tra loro indipendenti, perché, quando le
cariche sorgenti si mettono in movimento generando una corrente, provocano un campo
magnetico. In effetti, si potrebbe obiettare che se le cariche sono ferme allora le due
grandezze possono considerarsi disaccoppiate. Non è così: il fatto che le sorgenti siano
ferme o in movimento dipende unicamente dal sistema di riferimento dal quale stiamo
osservando il fenomeno. Ciò vuol dire che se delle sorgenti sono ferme per noi (e quindi
non creano campo magnetico), possono non esserlo per un osservatore posto in un altro
riferimento, quindi genereranno un campo magnetico per l’altro osservatore.
Queste considerazioni qualitative ci inducono a pensare, quindi, che è possibile
unificare i fenomeni elettrici e quelli magnetici raggruppandoli in un’unica entità fisica
definita campo elettromagnetico. È doveroso notare che, seppure la descrizione dei
fenomeni elettrici e magnetici è fisicamente associata ad un unico campo, ciò non trova
riscontro nelle equazioni matematiche, nel senso che il campo elettromagnetico non è un
r
r
unico vettore, bensì è sempre rappresentato dai vettori E e B , anche nella trattazione
ondulatoria che adopereremo in seguito.
VII.2.
Induzione elettromagnetica
Le considerazioni qualitative appena fatte, storicamente, furono la conclusione di
un processo di comprensione di alcuni fenomeni elettrici e magnetici che non trovavano
spiegazione in nessun altro modo se non in quello che vedremo in seguito.
Per capire in maniera piuttosto approfondita questo argomento è necessario partire
dall’evidenza sperimentale. Consideriamo due circuiti costituiti da una linea chiusa, che
94
Campi variabili nel tempo
Massimiliano Carfagna
chiameremo C ed S . Supponiamo che in serie al circuito C , in cui non è presente alcun
generatore di tensione, ci sia un galvanometro, necessario per misurare un eventuale
corrente che lo attraversa. Il circuito S avrà delle caratteristiche variabili che vedremo tra
un attimo. A questo punto supponiamo di eseguire alcuni esperimenti:
r
1) S in DC, in moto con velocità v : supponiamo di far passare una
corrente continua nel circuito S e di metterlo in moto, rispetto al
r
circuito C con una velocità v generica.
2) S in AC, fermo rispetto a C : supponiamo di far passare in S una
corrente variabile nel tempo, ma, questa volta, mantenendolo fermo
rispetto al circuito C .
r
3) S = magnete, in moto con velocità v : supponiamo che il circuito
sorgente S non sia un conduttore, come si è ipotizzato fino ad ora, bensì
un magnete permanente, e che questo venga messo in moto con velocità
r
v rispetto al circuito C .
r
4) S = sbarra conduttrice, in moto rotatorio con velocità v : supponiamo
ora che il circuito sorgente sia una sbarretta conduttrice che rotola lungo
un filo conduttore piegato ad U (che, in questo caso sarebbe il circuito
r
C ), e che abbia una velocità lineare pari a v . Inoltre supponiamo che
r
sia presente un campo magnetico B costante, diretto normalmente al
piano del circuito ad U.
In ognuno dei precedenti casi, mantenendo fermo e poco distante da S , il circuito
,
si
verifica
che in C il galvanometro misurerà una corrente. Questa corrente è indotta
C
dalle situazioni appena citate, quindi il fenomeno prende il nome di induzione
elettromagnetica.
A questo punto possiamo chiederci quale sia la causa di tale induzione di corrente
nel circuito C .
La prima considerazione necessaria da fare è la seguente: ognuno dei quattro
fenomeni prevede la presenza del campo di induzione magnetica. C’è, però, da dire che
quest’ultimo si manifesta nei quattro esperimenti in modo sostanzialmente diverso, infatti:
r
• nei casi 1), 2) e 3) il campo B non è costante nel tempo, infatti, seppur la
corrente stazionaria e il magnete producano campi costanti, il fatto che essi
r
r
si muovano con velocità v genera una variazione nel tempo di B ; inoltre,
nel caso 2) si ha che una corrente dipendente dal tempo necessariamente
genera un campo di induzione magnetica variabile nel tempo;
r
• nel caso 4) il campo di induzione magnetica B è costante nel tempo per
ipotesi, quindi la situazione è apparentemente differente dai precedenti
fenomeni. Si può notare, però, che la superficie sulla quale incide il campo
r
B non è costante, in quanto, la sbarretta S , istante per istante, si muove
facendo aumentare la superficie sulla quale incide il campo. Dunque anche
in questo caso è presente una variabilità nel tempo di una grandezza
interessata al fenomeno.
Dopo aver considerato ognuna di queste osservazioni, possiamo proceder all’analisi
di un caso specifico, per poter arrivare alla formulazione di una legge del tutto generale
che prende il nome di legge di Farady – Neumann.
95
Campi variabili nel tempo
VII.3.
Massimiliano Carfagna
Legge di Farady – Neumann
Analizziamo il caso specifico dell’esempio 4) fatto in precedenza. Abbiamo detto
che la sbarra S è un conduttore, di lunghezza l , che rotola su un circuito piegato ad U e
che normalmente al piano incide, da basso verso l’alto (normale uscente dal piano), un
r
campo di induzione magnetica B , supponiamo, inoltre, che la velocità di traslazione della
r
sbarretta v sia costante; la situazione è rappresentata nella seguente figura:
r
B
G
z
k̂
x(t ) = v ⋅ t
r
Ei
Σ r
FL
l
ĵ
i (t )
y
−q
iˆ x
r
v
+q
r
Bi
Analizziamo in dettaglio cosa accade: l’avanzamento della sbarra nella direzione
r
r
x , per via della presenza del campo magnetico B , genera una forza di Lorentz FL
orientata come in figura, la quale a sua volta genera un addensamento di cariche agli
estremi della sbarretta. Queste cariche, a loro volta, instaurano un campo elettrico, diretto
dall’accumulo di carica positiva a quella negativa, che a circuito aperto, è uguale al campo
di Lorentz, e che chiameremo campo elettromotore:
r
r
r
FL r r
Ei = E L =
= v × B = vB ⋅ ˆj
80.
q
Appare, dunque, evidente che, qualora la sbarretta vada a chiudere il circuito ad U,
all’interno del circuito si instauri una corrente variabile nel tempo i (t ) , che scorre nel verso
indicato in figura (dalla carica positiva a quella negativa). A questo punto possiamo notare
che la circolazione di corrente variabile nel tempo, a sua volta, genera nel circuito, un
r
campo magnetico indotto Bi opposto in verso (per via del verso di scorrimento della
r
corrente) al campo inducente B
A questo punto, calcoliamo la circuitazione del campo elettromotore sulla sbarretta:
r r
Ei ⋅ dl = vBdl = vBl
81.
∫
∫
l
l
Dato che il campo magnetico è costante nel tempo, ma la corrente indotta nel circuito C è
variabile, possiamo ipotizzare che la variabilità temporale di quest’ultima sia dovuta alla
variabilità temporale della superficie sulla quale incide il campo magnetico. L’unica
quantità matematica che lega la superficie al campo è il flusso del campo di induzione
96
Campi variabili nel tempo
Massimiliano Carfagna
()
r
magnetica Φ B , che in questo caso corrisponde a:
r
r r
Φ B = B ⋅ dΣ = B ⋅ (l ⋅ x(t )) = Blvt
()
∫
82.
Σ
Osservando le due quantità appena calcolate ci si accorge che, se deriviamo rispetto al
tempo la seconda delle due otteniamo la circuitazione del campo elettromotore cambiata di
r
segno. A questo punto, è chiaro che, se invece di calcolare il flusso di B , calcolassimo il
r
flusso di Bi (esattamente il suo opposto) si avrebbe che:
r
r
r
Φ Bi = Bi ⋅ dΣ = Bi dΣ ⋅ − kˆ ⋅ kˆ = − B ⋅ (l ⋅ x(t )) = − Blvt
83.
( )
∫
∫
Σ
Σ
(
)
(
)
r
Nella precedente relazione abbiamo scritto − kˆ ⋅ kˆ in quanto Bi è opposto in verso alla
normale uscente della superficie Σ . Da notare che negli ultimi passaggi si è sostituito il
modulo del campo inducente, in quanto i due moduli sono uguali.
Deriviamo dunque rispetto alrtempo, ed otterremo che:
r
r r
dΦ B
dΦ B
= −vBl ⇒ Ei ⋅ dl = = Bvl
84.
dt
dt
()
()
∫
l
Se indichiamo con f i la circuitazione del campo elettromotore, si enuncia così la legge di
Faraday – Neumann: se un circuito lungo l è immerso in un campo di induzione
r
magnetica B , la variazione temporale del flusso del campo provoca, sul circuito stesso,
una forza elettromotrice, detta forza elettromotricerindotta, pari a:
dΦ B
85.
fi = −
dt
Voglio precisare che la Faraday – Neumann, ricavata in qui a partire da un caso
molto particolare, ha una validità del tutto generale, dato che essa è facilmente ricavabile
dalla terza di Maxwell scritta nel caso non stazionario (che ancora non si è introdotta, e che
comunque la introdurremo a partire dalla Farady – Neumann).
Prima di procedere è necessario fare una osservazione sul segno meno che compare
nella Farady – Neumann. Abbiamo detto che al passaggio di corrente indotta si genera un
r
campo magnetico Bi opposto al campo inducente. Il modulo del campo indotto è uguale a
r
quello del campo inducente se B è costante nel tempo, e varia la superficie, mentre se la
r
superficie e costante, allora sarà B ad essere varibile nel tempo, quindi, in questo secondo
caso il campo indotto andrà, alla fine, ad eguagliare in modulo il campo inducente;
riassumendo:
r
⎧ B = cost
⇒ Bi ≡ B
⎨
⎩ Sr = Sr(t )
86.
eq .
⎧ B = B (t )
⇒ B i = B i (t ) ≡ B (t )
⎨
⎩ S = cost
()
97
Campi variabili nel tempo
Massimiliano Carfagna
Considerando che, per ipotesi il circuito sul quale si applica la Faraday – Neumann è un
circuito chiuso, e considerando che, quindi, Σ (che rappresenta la generica superficie di
integrazione, di cui il circuito ne è il contorno) sarà anch’essa chiusa, il flusso totale del
campo inducente e del campo indotto deve essere nullo per via della solenoidalità del
campo magnetico, per cui si ha che:
r
r
r
r
r
r
dΦ Bi
dΦ B
87.
Φ B + Φ Bi = 0 ⇒ Φ B = −Φ Bi ⇒
=−
dt
dt
Questo spiega la differenza di segno che si era verificata nei precedenti calcoli. Possiamo
enunciare, quindi, la cosiddetta legge di Lenz: la variazione di flusso del campo indotto
tende a compensare la variazione di flusso del campo inducente, ovverosia sono l’una
l’opposta dell’altra.
() ( )
VII.4.
()
( )
( )
()
Cause della variazione di flusso.
Possiamo scrivere la legge di Faraday – Neumann in modo esplicito, considerando
che:
()
r
⎡
⎤
r r r r
d ⎢ r r⎥
dΦ B
B ⋅dΣ
⇒ E + v × B ⋅ dl = −
fi = −
88.
⎥
dt ⎢
dt
l
⎣Σ
⎦
r
r r r
Nella quale la quantità E i = E + v × B rappresenta il caso più generale di campo
elettromotore.
In effetti la variazione di flusso può essere dovuta o alla variazione temporale della
superficie sulla quale incide il campo (come nel caso 4) del paragrafo 2), oppure alla
variazione temporale del campo magnetico agente su una superficie costante nel tempo
(come nei casi 1), 2) e 3) del paragrafo 2). A sua volta la variazione del campo può essere
dovuta o alla variazione temporale delle sorgenti (ossia quando le correnti inducenti sono
variabili nel tempo come nel caso2), oppure al moto delle sorgenti (come nel caso 1) e 3).
Analizziamo, dunque i singoli casi.
r r r
i) Σ = Σ (t ) , B = B(r ) : supponiamo di avere un campo costante nel tempo che
incide sulla superficie Σ di cui il circuito C ne è il contorno. Supponiamo che
al tempo t = t i il circuito sia lungo l i , mentre al tempo t = t f con t f = t i + dt
∫(
)
∫
il circuito sia lungo l f e la superficie sia passata da Σ i a Σ f . Le due superfici
r
hanno normali concordi. Un elemento dl del circuito spazza, nel tempo dt ,
r r
r
un’areola pari a dΣ = dl × ds = vdldt ⋅ kˆ , nella quale si è supposto che ds = vdt
e k̂ è la normale uscente dall’areola laterale del cilindroide che si viene a
formare. Appare evidente che essendo tutta la superficie chiusa, il flusso totale
del campo di induzione magnetica deve essere nullo. Per flusso totale si intende
la somma del flusso entrante ed uscente dalle basi, sommato al flusso uscente
lateralmente, ovverosia − Φ i + Φ f + Φ dΣ = 0 , ne segue che dΦ = −Φ dΣ , nella
quale dΦ = Φ f − Φ i . La quantità Φ dΣ prende il nome di flusso tagliato. A
questo punto possiamo calcolare esplicitamente il flusso tagliato, nel seguente
98
Campi variabili nel tempo
Massimiliano Carfagna
modo:
Φ dΣ =
∫
r r
B ⋅ dΣ =
dΣ
∫
(
r r r
B ⋅ dl × v dt
)
dΣ
89.
(
) (
)
r r r
r r r
Nella quale possiamo utilizzare l’identità vettoriale B ⋅ dl × v dt = dt v × B ⋅ dl
così da cambiare anche la variabile e la dimensione d’integrazione:
r r r
Φ dΣ = dt v × B ⋅ dl
90.
∫(
)
l
E quindi ricordando che dΦ = −Φ dΣ otteniamo che:
r r r
dΦ
−
= v × B dl
dt
∫(
)
91.
l
r
La quale rappresenta proprio la legge di Faraday – Neumann, nel caso in cui E
sia nullo. In queste condizioni (B = cost ; Σ = Σ (t )) , si dice che siamo di fronte
al puro flusso tagliato, ed in condizioni di puro flusso tagliato il campo
r
r r
elettromotore indotto è semplicemente E i = v × B .
r r r
ii) B = B(r , t ) , Σ = cost : in questo caso è necessario suddividere l’analisi nei casi
in cui la causa della variazione temporale è il moto delle sorgenti, ai casi in cui
la variazione temporale è data da sorgenti variabili nel tempo (correnti
dipendenti dal tempo).
ii.a) Sorgenti stazionarie in moto: è evidente che se il circuito S è in moto
r
con velocità v rispetto al circuito C , sul circuito S si genera un campo
r
r
r
di Lorentz dato dalla E L , S = v S × B . Dunque anche in questo caso si può
introdurre l’interpretazione di Lorentz.
ii.b) Sorgenti variabili ferme: questo fenomeno non può essere interpretato
con la forza di Lorentz, quindi rappresenta una novità nell’ambito dei
fenomeni trattati, e rappresenta anche la prova del fatto che la Faraday –
Neumann non è riconducibile solamente alla forza di Lorentz bensì alla
totalità dei fenomeni variabili nel tempo.
Possiamo inoltre mostrare un’altra evidenza che si deduce dalla Faraday –
Neumann: la non conservatività del campo elettrico in caso di fenomeni dipendenti dal
tempo. Si ha infatti che se:
r
r
r
dΦ B
≠ 0 ⇒ Ei (t ) ⋅ dl ≠ 0
92.
dt
()
∫
l
Ma dato che un campo vettoriale è conservativo solo se la circuitazione lungo una linea
r
chiusa è nulla, allora è chiaro che E i (t ) non è conservativo.
99
Campi variabili nel tempo
VII.5.
Massimiliano Carfagna
Terza eq.ne di Maxwell (caso non stazionario)
Come abbiamo precedentemente annunciato, dalla Faraday – Neumann possiamo
far discendere la terza equazione di Maxwell nel caso non stazionario.
In effetti quest’ultima relazione può essere vista come la legge di Faraday –
Neumann nel caso locale, in quanto, come ben sappiamo, nella terza di Maxwell compare
il rotore del campo elettrico, che rappresenta proprio il campo elettrico punto per punto.
Per ricavare questa relazione possiamo procedere in due modi, ottenendo lo stesso
risultato. Nel primo caso consideriamo il circuito rigido e fermo e il campo magnetico
variabile nel tempo, nel secondo caso consideriamo entrambi variabili nel tempo.
Primo caso: scriviamo la Faraday – Neumann nella forma generale:
r
⎡
⎤
r r r r
d ⎢ r r⎥
dΦ B
B ⋅dΣ
⇒ E + v × B ⋅ dl = −
fi = −
93.
⎥
dt ⎢
dt
l
⎣Σ
⎦
r
Abbiamo detto che il circuito è fermo ( v = 0 ), dunque si ha che:
⎡ r r⎤
r r
d
E ⋅ dl = − ⎢ B ⋅dΣ ⎥
94.
⎥
dt ⎢
l
⎣Σ
⎦
D’altra parte, al primo membro possiamo applicare il teorema di Stokes, mentre al secondo
membro possiamo invertire l’ordine di derivazione e scrivere
che:
r
r r r
r
∂B
∇ × E dΣ = −
dΣ
95.
∂t
Σ
Σ
r
In cui è B l’oggetto della derivata temporale, in quanto abbiamo supposto che Σ non sia
dipendente dal tempo in quanto il circuito è indeformabile. Dato che la precedente vale per
qualsiasi Σ allora la sua validità implica l’uguaglianza degli integrandi:
r
r r
∂B
96.
∇× E = −
∂t
Secondo caso: Consideriamo un sistema di riferimento in quiete Oxyz , in cui un
circuito di superficie Σ = Σ (t ) al tempo t si trovi in una data posizione ed al tempo t + dt
assuma forma Σ = Σ (t + dt ) e si trovi spostato rispetto alla posizione di partenza. Il
secondo membro della Faraday – Neumann sarà:
⎤
⎡
r
r
r
r⎥
d ⎢
B(t + dt ) ⋅dΣ − B(t ) ⋅dΣ
−
97.
⎥
dt ⎢
Σ (t )
⎦⎥
⎣⎢Σ (t + dt )
r
Sviluppando al primo ordine il fattore B(t + dt ) si ottiene che:
r
r
r
∂B
98.
B(t + dt ) = B(t ) +
dt
∂t
E sostituendolo nella precedente relazione possiamo scrivere che:
()
∫(
∫
)
∫
∫
∫(
)
∫
∫
∫
100
Campi variabili nel tempo
Massimiliano Carfagna
r
⎤
⎡
r
r
r
r
r⎥
1 ⎢
∂B
fi = −
B(t ) ⋅dΣ +
dt ⋅dΣ − B(t ) ⋅dΣ =
⎥
dt ⎢
∂t
⎥⎦
⎢⎣Σ (t + dt )
Σ (t + dt )
Σ (t )
99.
r
⎤
⎡
r
r
r
r
∂B r
1
⋅dΣ =
= − ⎢ B(t ) ⋅dΣ − B(t ) ⋅dΣ ⎥ −
⎥
dt ⎢
∂t
Σ (t )
⎦⎥ Σ (t + dt )
⎣⎢Σ (t + dt )
Possiamo notare che gli integrali nella parentesi quadra hanno le seguenti caratteristiche:
r
• B(t ) è calcolato nello stesso istante t , quindi il campo di induzione magnetica è
costante nei due integrali;
• ciò che varia nei due integrali e la geometria del circuito e conseguenzialemnte la
superficie;
r
dunque la quantità tra parentesi quadre rappresenta una variazione di flusso di B dovuta al
colo moto del circuito, e abbiamo calcolato in precedenza (in occasione della condizione di
puro flusso tagliato) che:
r r r
dΦ
−
= v × B dl
100.
dt
∫
∫
∫
∫
∫
∫
∫(
)
l
r
La quale è valida per qualsiasi circuito che abbia come caratteristica B costante nel tempo
e il circuito in movimento. Inoltre essa è valida anche nel caso di un circuito non rigido,
per cui possiamo scrivere che:
⎤
⎡
r
r
r
r⎥
r r r
1 ⎢
B(t ) ⋅dΣ − B(t ) ⋅dΣ = v × B dl
−
101.
⎥
dt ⎢
Σ (t )
⎦⎥ l
⎣⎢Σ (t + dt )
E quindi si ha la Faraday – Neumann assume la forma:
r
r
r r
r r
r r r
r r r
∂B r
∂B r
E i ⋅ dl = v × B dl −
⋅dΣ ⇒ Ei ⋅ dl − v × B dl = lim
⋅dΣ
dt → 0
∂t
∂t
∫
l
∫(
l
)
∫
∫
∫
∫
Σ (t + dt )
∫(
∫(
l
l
⇓
r
r r r r
∂B r
E i − v × B ⋅ dl = −
⋅dΣ
∂t
∫(
)
)
∫
Σ (t + dt )
102.
∫
)
Σ
l
Nella quale abbiamo mandato al limite per dt → 0 il secondo membro cosicché si può
notare che essa è una variazione di flusso a superficie costante e campo variabile nel tempo
(a differenza del membro trattato in precedenza che presentava una situazione invertita).
Possiamo notare che un osservatore posto nel riferimento inerziale misura una forza
pari alla:
r
r r r
103.
F = q E+v×B
r
r
La quale è dovuta al campo elettromotore indotto, ovverosia F = qE i , ne segue che
uguagliando le due espressioni e andando a sostituire il risultato nella precedente otterremo
che:
(
101
)
Campi variabili nel tempo
Massimiliano Carfagna
r
r r r
r r r r
Ei = E + v × B ⇒ E = Ei − v × B ⇒
∫
r
r r
∂B r
E ⋅ dl = −
⋅dΣ
∂t
l
∫
104.
Σ
Applicando il teorema del rotore e uguagliano le funzioni integrande si ottiene il risultato
cercato:
r
r
r r r
r r
∂B r
∂B
∇ × E dΣ = −
dΣ ⇒ ∇ × E = −
105.
∂t
∂t
∫(
)
Σ
VII.6.
∫
Σ
Autoinduzione ed induttanza
r
Un circuito percorso da corrente I (t ) genera un campo di induzione magnetica B(t )
r
φ B concatenato con il
variabile nel tempo, quindi, necessariamente, varierà il flusso
circuito. Per la legge di Faraday – Neumann, nel circuito, si instaurerà una forza
elettromotrice f a che prenderà il nome di forza elettromotrice autoindotta (in quanto il
fenomeno è riflessivo, nel senso che è il circuito stesso a generare questa corrente, questa
denominazione giustifica anche il cambiamento di pedice).
Nell’ipotesi che la corrente abbia lo stesso valore lungo tutto il circuito e che i
materiali siano omogenei ed isotropi è possibile notare che, per la legge di Biot – Savart la
corrente è proporzionale al campo di induzione magnetica, ed a sua volta il campo di
induzione magnetica è proporzionale al flusso elementare, quindi sicuramente possiamo
dire che il flusso è proporzionale alla corrente, e chiameremo il coefficiente di
proporzionalità coefficiente di autoinduzione L, o induttanza, riassumendo:
r
r
⎧ r r µ0
dl × ∆r
(
)
B
r
I
=
⋅
⎪
r3
r
4π
∆r
r
⎧
⎪
B
∝I
⎪
l
⇒⎨
r ⇒ Φ B = LI
106.
⎨ r
r
r
⎪
B
Φ
∝
⎪Φ B = B ⋅ dS
⎩
⎪
S
⎩
Il valore del coefficiente di autoinduzione è determinato unicamente dalla geometria del
circuito e dal materiale. Ciò vuol dire che, se il circuito possiede una geometria semplice
allora il fenomeno dell’autoinduzione può essere trascurato in quanto la forza
elettromotrice autoindotta è molto piccola, e quindi anche l’induttanza è molto piccola,
dato che
r
dΦ B
dI
107.
= −L
fa = −
dt
dt
In generale, quindi, il circuito trattato ha una equazione che ne regola il passaggio
della corrente data dalla:
f + f a = RI
108.
in cui f è la forza elettromotrice erogata dal generatore ed R è la resistenza equivalente
del circuito (ossia la resistenza dei conduttori che costituiscono il
()
∫
()
()
∫
()
circuito, la resistenza interna del generatore, eventuali resistori presenti nel circuito). Come
abbiamo detto in precedenza, se il circuito è particolarmente semplice il termine f a risulta
102
Campi variabili nel tempo
Massimiliano Carfagna
trascurabile, mentre, se nel circuito sono presenti condizioni che favoriscono
l’autoinduzione (solenoidi, circuiti particolarmente complessi, circuiti percorsi da correnti
che variano molto rapidamente,…) il termine suddetto non può essere trascurato e nello
schema del circuito viene inserito un simbolo come quello in figura che prende il nome di
induttore ed indica la presenza di un fenomeno di autoinduzione la cui f.e.m non è
trascurabile. Un circuito di questo tipo è detto circuito RL in serie e l’equazione
differenziale che regola il passaggio della corrente è:
R
f
L
I
T
Circuito RL (serie)
L
VII.7.
dI
+ RI = f
dt
109.
Analisi del circuito RL (serie)
Il circuito RL in serie è quello mostrato nella precedente figura, inoltre la sua
equazione per la corrente è data dalla:
dI
⎧
I + τ = Im
⎪
dI
L dI
f
⎪
dt
L + RI = f ⇒ I +
= ⇒⎨
110.
dt
R dt R
⎪τ = L ; I = f
m
R
R
⎩⎪
La cui soluzione è facilmente ricavabile per separazione delle variabili, infatti si ha che:
103
Campi variabili nel tempo
I − I m = −τ
Massimiliano Carfagna
I − Im
dI
dI
dt
τ
=− ⇒
=− ⇒
⇒
τ
dt
dI
dt
I − Im
∫
∫
dI
dt
=−
τ
I − Im
⇓
111.
t
ln(I − I m ) = − + A ⇒ I − I m = Ae −(t / τ )
τ
A questo punto possiamo determinare il valore della costante a partire dalle seguenti
condizioni iniziali: al tempo zero la corrente che circola nel circuito è nulla, per cui
imponendo che:
I (0) − I m = Ae −(0 / τ ) ⇒ 0 − I m = A ⋅ 1 ⇒ A = − I m
112.
E sostituendo nella precedente si ottiene che:
L
⎧
τ=
⎪
⎪
R
I = I m (1 − e −(t / τ ) ) con ⎨
113.
⎪I = f
⎪⎩ m R
Im = f R
L = 197 ⋅10 −3
L = 197 ⋅10 −2
L = 197 ⋅10 −1
Andamento della corrente in funzione del tempo
per valori decrescenti di induttanza
La precedente relazione rappresenta l’andamento della corrente in un circuito RL (serie)
dopo la chiusura dell’interruttore T. Nel grafico è rappresentato questo andamento per
diversi valori di induttanza. Si vede chiaramente che, a parità di resistenza, quanto più è
alta l’induttanza, tanto più tempo impiega la corrente a raggiungere il valore che
avrebbe se non fosse presente l’induttore.
In precedenza abbiamo detto che la forza elettromotrice autoindotta ai capi
dell’induttore è data dalla:
104
Campi variabili nel tempo
Massimiliano Carfagna
dI
114.
dt
Dato che ora conosciamo la relazione che lega la corrente al tempo, possiamo derivarla e
sostituirla nella relazione precedente, in modo da poter graficare anche questa relazione per
poter capire come si comporta la f.e.m. indotta:
dI d
⎛R f
⎞
=
I m (1 − e −(t / τ ) ) = τ −1 I m e −(t / τ ) ⇒ f a = − L ⋅ ⎜ ⋅ e −( R / L )t ⎟
dt dt
⎝L R
⎠
115.
⇓
f a = −L
[
]
f a = − fe −( R / L )t
L = 197 ⋅10 −3
L = 197 ⋅10 −2
L = 197 ⋅10 −1
Andamento della f.e.m. autoindotta in funzione del tempo per
valori decrescenti di induttanza,misurata ai capi dell’induttore
E’ importante notare che la f.e.m. autoindotta aumenta all’aumentare del tempo, inoltre, il
segno meno garantisce l’opposizione alla f.e.m. erogata dal generatore.
A questo punto ci chiediamo: cosa accade se apriamo l’interruttore del circuito? Di
fatto la resistenza aumenta rapidamente, attestandosi ad un valore decisamente maggiore
del precedente (PERCHE’?) che indicheremo con R'
116.
Questo comporta che l’equazione del circuito diventa:
L dI
f
dI
L + R' I = f ⇒ I +
=
117.
R' dt R'
dt
La cui soluzione non si discosta molto dal caso precedente, infatti si ha che:
dI
dt
dI
t
I − I m' = −τ'
⇒− =
⇒ ln I − I m' = − + A ⇒ I = I m' + Ae −t τ'
118.
'
dt
τ' I − I m
τ'
(
105
)
Campi variabili nel tempo
Massimiliano Carfagna
Per la condizione iniziale, però, adesso è necessario imporre che al tempo zero (tempo di
apertura del circuito) la corrente che passa nel circuito è la corrente massima, ossia I m , ne
consegue che:
I m = I m' + Ae 0 ⇒ A = I m − I m' ⇒ I = I m' + I m − I m' e −t τ'
119.
(
)
Dato che R' >> R ne consegue che I m = f / R >> I = f / R' , e quindi si possono
'
m
trascurare i due termini I m' e riscrivere la precedente relazione nella forma approssimata
seguente:
I ≅ I m e −t τ'
120.
Prima di mostrare l’andamento di questa funzione vogliamo far notare che anche la
tensione ai capi dell’induttore cambia, in quanto
⎞
⎛ ⎛ 1⎞
dI
dI
⎛ f R' −( R' / L )t ⎞
f a' = − L = − L⎜⎜ I m ⎜ − ⎟e −t / τ' ⎟⎟ ⇒ f a' = − L = L⎜
e
⎟
dt
dt
⎝R L
⎠
⎠
⎝ ⎝ τ' ⎠
121.
⇓
R' −( R' / L )t
fe
R
Si può notare che la tensione ai capi dell’induttore, adesso, non ha il segno negativo,
essendo l’unica rimasta nel circuito (circuito aperto = assenza di generatore), il grafico,
inoltre, comparato con il precedente, è il seguente:
f a' =
f a' =
R' −( R' / L )t
fe
R
Apertura del circuito
f a = fe − ( R / L )t
−f
Andamento della f.e.m autoindotta ai capi dell’induttore in funzione
del tempo, prima a circuito chiuso, poi a circuito aperto
Dal grafico si capisce che al momento dell’apertura nel circuito agisce una tensione che
istantaneamente assume un valore altissimo, per poi decadere esponenzialmente in pochi
secondi: essa prende il nome di extratensione di apertura. Ad essa, è ovviamente collegata
106
Campi variabili nel tempo
Massimiliano Carfagna
una extracorrente di apertura la quale è data proprio dalla
I ≅ I m e −t τ'
122.
la quale ha l’andamento molto simile a quello della extratensione, che mostriamo nella
seguente figura. Le extracorrenti di apertura si manifestano molto spesso nell’esperienza
quotidiana, infatti capita spesso che, spegnendo la luce, nell’interruttore si veda scoccare
una scintilla, essa non è altro che l’effetto dell’extracorrente di apertura, la quale satura il
dielettrico presente nell’interruttore e provoca la scintilla.
Im
I ≅ I m e −t τ'
(
I = I m 1 − e − (t / τ )
)
Apertura del circuito
Andamento della corrente in funzione del tempo, prima a circuito
chiuso, poi a circuito aperto
Il grafico mostra anche che la corrente nel circuito impiega qualche secondo per decadere
del tutto, inoltre, seppur non del tutto visibile dal disegno, il valore di extracorrente di
apertura corrisponde, matematicamente, ad un asintoto verticale della funzione, ciò
dimostra anche che le extracorrenti assumono valori altissimi, ma decadono in pochi
istanti.
É possibile fare un’analisi dal punto di vista energetico del circuito in questione,
infatti prendendo in considerazione la
dI
f = RI + L
123.
dt
Nella quale consideriamo costanti le quantità f , R ed L , possiamo notare che
moltiplicando ambo i membri per Idt otteniamo:
fIdt = RI 2 dt + LIdt
124.
Il primo membro di quest’ultima relazione rappresenta proprio l’energia erogata dal
generatore, infatti, in questo caso, la f rappresenta la forza elettromotrice del generatore e
non la f.e.m. autoindotta; appare anche evidente che il primo addendo al secondo membro
107
Campi variabili nel tempo
Massimiliano Carfagna
corrisponde all’energia dissipata dalla resistenza nell’intervallo temporale dt , quindi si
deduce che anche l’induttore sottrae una parte di energia al generatore, la quale, in forma
elementare, può essere scritta come:
dU L = LIdI
125.
Considerando che all’istante iniziale la corrente che fluisce nel circuito è nulla, mentre
dopo che sia trascorso un tempo dt essa è pari ad I , possiamo integrare la precedente
relazione dicendo che:
I
1
U L = LIdI = LI 2
126.
2
0
La quale rappresenta l’energia posseduta da un induttore di induttanza L percorso da
corrente I . É chiaro che calcolando l’energia per unità di tempo otterremo la potenza
posseduta dall’induttanza. Si dimostra facilmente che, ricordando l’espressione esplicita
della corrente circolante nel circuito RL, ovverosia:
L
⎧
τ=
⎪
⎪
R ⇒ I = f (1 − e −t / τ )
I = I m (1 − e −(t / τ ) ) con ⎨
127.
R
⎪I = f
⎪⎩ m R
La potenza erogata dall’induttore risulta essere, ovviamente, la differenza tra la potenza
erogata dal generatore e la potenza dissipata dalla resistenza, infatti
f2
(1 − e −t / τ )
WG = fI =
R
128.
f2
2
−t / τ 2
(1 − e )
WR = RI =
R
Ma, d’altra parte, la potenza dell’induttore altro non è che l’energia per unità di tempo,
ovverosia:
2
dU L
dI
f
f ⎛R
⎞ f
= LI
= L (1 − e −t / τ ) ⋅ ⎜ e −t / τ ⎟ =
(
WL =
1 − e −t / τ )(e −t / τ )
129.
dt
dt
R
R⎝L
⎠ R
Quindi sottraendo membro a membro le potenze del generatore e della resistenza si giunge
proprio all’espressione appena ricavata, infatti:
f2
f 2 −t / τ
(
(e − e −2t / τ )
1 − e −t / τ − 1 − e − 2t / τ + 2e −t / τ ) =
WG − WR =
R
R
130.
f2
−t / τ
−t / τ
(1 − e )(e ) = WL
=
R
Nel grafico successivo mettiamo a confronto le diverse potenze al variare del tempo.
∫
108
Campi variabili nel tempo
Massimiliano Carfagna
f2/R
WG
WR
WL
τ
Andamento comparato della potenza del generatore,
della resistenza e dell’induttanza in un circuito RL
VII.8.
Solenoidi percorsi da corrente
Dalle considerazioni appena effettuate circa l’introduzione dell’induttanza e
dell’energia ad essa associata, possiamo passare all’applicazione di questi concetti al caso
specifico di un sistema magnetico molto utilizzato nella pratica: il solenoide, di lunghezza
l , percorso da corrente I composto da N spire, ognuna di superficie S .
Come prima cosa calcoliamo il coefficiente di autoinduzione del solenoide, prima
nel caso in cui esso sia privo di nucleo, poi nel caso in cui possegga un nucleo
ferromagnetico di costante µ r :
1. Solenoide vuoto: sfruttiamo la formula introduttiva dell’induttanza, ovverosia
r
che L = Φ B0 I , quindi, dato che il campo magnetico generato all’interno del
solenoide vuoto (assenza di nucleo ferromagnetico nel solenoide) è
r
B0 = µ 0 ( N l )I = µ 0 nI , allora, si ha che Φ B0 = B0 NS = µ 0 nINS e quindi
( )
( )
l’induttanza diventa: L = µ 0 nNS = µ 0 n 2 lS .
2. Solenoide con nucleo ferromagnetico: ciò che cambia rispetto al caso
precedente è solo il campo di induzione magnetica, e conseguenzialmente il suo
r
flusso, cosicchè si ha: L = Φ B I = µ r B0 NS I = µ r µ 0 nNS = µ r µ 0 n 2 lS .
A questo punto, servendoci dell’analisi fatta sul circuito RL, possiamo pensare il
solenoide percorso da corrente come un circuito RL alimentato da un forza elettromotrice
costante f , le cui spire posseggono resistenza complessiva R , cosicchè si avrà la ormai
solita:
()
109
Campi variabili nel tempo
Massimiliano Carfagna
dI
131.
dt
La corrente, però, provoca un’autoinduzione, come si è visto nel paragrafo precedente, ciò
vuol dire che si instaura una f.e.m. autoindotta che, per la Faraday – Neumann sarà:
dB
dI d
dI
dΦ
Φ(B ) = LI ⇒
= L ⇒ L = ( NSB ) = NS
132.
dt
dt dt
dt
dt
A questo punto, ricordando il procedimento seguito per il calcolo dell’energia
dell’induttore nel caso del circuito RL, ci basta sostrituire il risultato ottenuto
nell’equazione del circuito RL e moltiplicare il tutto per Idt , per cui:
dB
f = RI + NS
⇒ fIdt = RI 2 dt + 1
NSIdB
133.
23
dt
dU L
f = RI + L
Si può notare che l’ultimo termine a secondo membro rappresenta proprio l’energia
elementare che deve essere somministrata al solenoide nel tempo dt .
A questo punto calcoliamo l’energia elementare per unità di volume, che chiameremo
du L , che nel caso del solenoide corrisponde a:
dU L dU L NSIdB
du L =
=
=
= nIdB
134.
V
Sl
Sl
Per un solenoide si dimostra facilmente (pag. 312 - Mecuccini – Silvestrini, Vol II) che
vale la nI = H con H = B µ , ne segue che la densità di energia sarà:
1
du L = BdB
135.
µ
r
E quindi integrando tra due valori di campo B generici, ad esempio tra 0 e B , otteniamo
la densità di energia magnetica del solenoide:
B
1 B
1 2 1
u M = du L =
BdB =
B = BH
136.
2µ
2
µ 0
0
Questa relazione prende il nome di energia magnetica in quanto, seppur generata
dall’induttore, corrisponde all’energia provocata dal campo magnetico B che si instaura
per via del passaggio di corrente nell’induttore (ossia per la variaizone di flusso
concatenato). Per sapere l’energia magnetica effettiva, basta integrare la densità u M su un
volume di spazio τ nel quale si propaga B . Vedremo in seguito in che modo questo
ragionamento possa essere generalizzato.
∫
VII.9.
∫
Legge di Felici e induzione mutua
Dalla definizione di coefficiente di autoinduzione (o induttanza) seguono alcune
conseguenze notevole che vale la pena di citare.
Come prima cosa possiamo introdurre la cosiddetta legge di Felici la quale si ricava
nel seguente modo: consideriamo una spira di superficie S , avvolta da N spire percorse
r
da corrente, immersa in un campo magnetico B ortogonale al piano della spira (una
situazione simile a quella vista nella definizione di momento magnetico); il flusso iniziale
del campo magnetico uscente dalla superficie della spira, sarà dato, quindi, dalla:
r
Φ i B = NSB
137.
()
110
Campi variabili nel tempo
Massimiliano Carfagna
r
Nella quale il valore di campo da inserire è il valore medio del modulo di B sull’area
occupata dalla spira. A questo punto, ammettendo che la corrente che circola negli
avvolgimenti sia costante, possiamo supporre una variazione del campo di induzione
magnetica, provocata, ad esempio, dal fatto che prendiamo la spira e la portiamo il una
regione di spazio in cui B = 0 , si ha quindi che, la variaizone di campo, genera una forza
elettromotrice indotta che corrisponde, per la Faraday – Neumann alla:
dΦ i
dΦ i
dI
fi = −
⇒ RI + L
=−
138.
dt
dt
dt
Avendo eguagliato la f.e.m. indotta all’equazione del circuito RL, in quanto la variazione
di flusso è, per l’appunto, la causa di un fenomeno di autoinduzione.
Possiamo notare, quindi , che, moltiplicando ambo i membri per dt , la precedente
relazione può essere integrata rispetto al tempo:
tf
I (t f )
Φf
RIdt + Ldt = −dΦ ⇒ RIdt + LdI = − dΦ
139.
∫
ti
∫
I (ti )
∫
Φi
Appare evidente che t i e t f rappresentano i tempi per cui, rispettivamente, il flusso vale
NSB e 0 (in quanto si è assunto che la spira venga spostata in una zona in cui il campo è
nullo, per cui è nullo anche il flusso).
I due integrali a primo membro hanno una semplice soluzione, infatti possiamo notare che:
- Idt = Q in cui Q è la carica totale che attraversa il circuito;
- I (t i ) , I t f sono entrambe nulle, in quanto all’inizio del fenomeno, nella spira
non passa corrente, alla fine neanche (in quanto la spira è posta in una zona in
cui B = 0 e quindi non c’è nessun campo magnetico che induca corrente
circolante)
In definitiva si ha che la variazione di flusso sarà pari al prodotto della resistenza per la
carica totale che attraversa il circuito, ovverosia:
∆Φ = Φ i − Φ f = RQ
140.
Questa relazione prende il nome di Legge di Felici. L’importanza di questa legge risiede
nel fatto che:
r
1. Q non dipende dalla legge temporale con cui varia il flusso di B ;
r
2. dalla misura di Q (mediante un galvanometro balistico) si può risalire al valore di B
agente sulla spira (basta ricordare che Φ i = NSB e che Φ f = 0 ).
Fino a questo punto si è sempre parlato di un singolo circuito percorso da corrente,
ma cosa succede se poniamo nelle vicinanze di questo, un secondo circuito non percorso
da corrente? Ciò che accade è la cosa seguente: supponiamo che il primo circuito sia
percorso da corrente variabile nel tempo I 1 (t ) ; ciò provoca un campo magnetico indotto
r
r
B1 (t ) . Dato che, oltre al primo circuito ( quindi al flusso di B1 (t ) concatenato al primo
circuito), è presente anche il secondo circuito, nel quale non scorre corrente, è possibile
r
calcolare anche quanto vale il flusso del campo B1 (t ) concatenato con il circuito 2, e per
quanto detto in precedenza, esso sarà proporzionale alla corrente (quale?) presente nel
circuito 1 (in quanto il 2 non è percorso da corrente), ovverosia:
( )
111
Campi variabili nel tempo
Massimiliano Carfagna
( )
r
141.
Φ 2 B1 = M 21 I1
Nella quale il coefficiente M 21 che compare nella precedente relazione, essendo, in effetti,
un coefficiente di induzione, prende il nome di coefficiente di mutua induzione (o
induttanza mutua), in quanto, come vedremo a breve, ha esattamente lo stesso valore,
anche se fosse il circuito 2 ad essere percorso con una corrente I 2 ≠ I 1 , mentre il circuito 1
non fosse percorso da corrente.
r
Tutto ciò si può dimostrare facilmente se calcoliamo in modo esplicito il flusso di B1 (t )
concatenato al circuito 2, sfruttando il potenziale vettore, infatti possiamo scrivere che:
r r
r
r r
r r r
Φ 2 B1 = B1 dS 2 = ∇ × A1 dS 2 = A1 dl 2
142.
( )
∫(
∫
S2
)
∫
S2
C2
Nella quale si è inteso che S 2 fosse una qualsiasi superficie chiusa che avesse come
contorno il circuito C 2 , ed inoltre, nell’ultimo passaggio si è utilizzato il teorema di
Stokes. A questo punto esprimiamo il potenziale vettore nella sua forma esplicita, e
sostituiamolo nella precedente relazione:
r ⎞
r r
r r µI 1 ⎛⎜
r
⎡ dl1 ⋅ dl 2 ⎤
dl1 ⎟ r µI 1
Φ 2 B1 = A1 dl 2 =
143.
r r dl 2 =
⎢ r r ⎥
4π ⎜⎜ r2 − r1 ⎟⎟
4π
r2 − r1 ⎦⎥
⎢
⎣
C2
C2 ⎝ C2
C2 C2
⎠
( )
∫
∫∫
r
dl1
z
r
r1
∫∫
r r
r2 − r1
r
r2
y
r
dl 2
C2
C1
x
È chiaro che, osservando le quantità definite nella figura precedente, si può notare che:
r r
r r
- dl1 ⋅ dl 2 = dl 2 ⋅ dl1
r r
r r
- r2 − r1 = r1 − r2
- l’ordine di integrazione può essere invertito
quindi la precedente relazione è simmetrica rispetto agli indici 1 e 2. Ciò dimostra che il
coefficiente di mutua induzione è simmetrico fra i due circuiti, in quanto, dividendo per I 1
la precedente relazione si ottiene che:
r r
⎡ dl1 ⋅ dl 2 ⎤
µ
M 21 =
⎢ r r ⎥ = M 12
144.
4π
⎢⎣ r2 − r1 ⎥⎦
∫∫
C2 C2
L’introduzione del coefficiente di mutua indizione ci permette anche di esprimere la forza
elettromotrice indotta dai due circuiti nel seguente modo:
dΦ
dI
f 2m = − 1 = − M 21 1
145.
dt
dt
112
Campi variabili nel tempo
VII.10.
Massimiliano Carfagna
Energia magnetica
Già in occasione del circuito RL si è introdotta la cosiddetta energia magnetica U M
di un circuito percorso da corrente. In questo paragrafo vogliamo approfondire gli aspetti
energetici generali che i circuiti percorsi da corrente posseggono, avvalendoci del principio
dei lavori virtuali.
Come prima cosa risolviamo un’apparente incongruenza energetica con un
esempio: supponiamo di avere un solenoide vuoto percorso da corrente costante nel tempo,
la sua energia magnetica è data dalla:
1
1
U M ,i = L0 I 2 = µ 0 n 2 lSI 2
146.
2
2
Ora immaginiamo di introdurre un cilindro ferromagnetico all’interno del solenoide: ciò
che accade è che esso viene attratto dal solenoide, quindi viene risucchiato all’interno;
l’energia finale, dopo che il cilindro ferromagnetico si trova all’interno del solenoide sarà:
1
1
U M , f = LI 2 = µ r µ 0 n 2 lSI 2
147.
2
2
e dato che per materiali ferromagnetici µ r è molto maggiore di 1, si ha che:
U M , f >> U M ,i
148.
ossia il sistema tende alla stabilità quando l’energia è massima: questa è un’idiozia bella e
buona! Una cosa del genere è fisicamente impossibile, dunque, nella nostra analisi ci
siamo dimenticati di qualcosa.
Per risolvere questa apparente incongruenza dobbiamo, innanzi tutto trovare una
espressione generale dell’energia magnetica, e possiamo farlo partendo dall’analisi di più
circuiti RL che interagiscono tra loro. Cominciamo con il caso di due circuiti per poi
generalizzare al caso di N circuiti.
Per descrivere il comportamento dei due circuiti possiamo scrivere il seguente
sistema di equazioni differenziali accoppiate:
dI 2
dI1
⎧
⎪⎪ f1 − L1 dt − M 12 dt = R1I1
149.
⎨
dI
dI
2
1
⎪f −L
− M 21
= R2 I 2
2
⎪⎩ 2
dt
dt
nelle quali le f.e.m. dei due circuiti sono costanti, inoltre viene considerato il dispendio di
energia dovuto sia all’autoinduzione che ogni circuito provoca su se stesso, sia il dispendio
energetico dovuto alla mutua induzione che ogni circuito provoca sull’altro. A questo
punto moltiplichiamo ambo i membri delle due equazioni rispettivamente per dQ1 = I1dt e
dQ2 = I 2 dt e sommiamo membro a membro, ricordando inoltre che M 12 = M 21 :
f 1 I 1 dt − L1 I 1 dI 1 − M 12 I 1 dI 2 = R1 I 12 dt
f 2 I 2 dt − L2 I 2 dI 2 − M 21 I 2 dI 1 = R2 I 22 dt
( f1 I 1 +
(
)
150.
f 2 I 2 )dt − L1 I 1 dI 1 − L2 I 2 dI 2 − M 12 (I 1 dI 2 + I 2 dI 1 ) = R1 I 12 + R2 I 22 dt
Si può notare come a primo membro siano evidenti i termini che riguardano la cosiddetta
energia magnetica U M , infatti raccogliendoli tutti sotto il segno di differenziazione, si ha
113
Campi variabili nel tempo
Massimiliano Carfagna
che:
1
⎛1
⎞
dU M = L1 I 1 dI 1 + L2 I 2 dI 2 + M 12 (I 1dI 2 + I 2 dI1 ) = d ⎜ L1 I 12 + L2 I 22 + M 12 I 1 I 2 ⎟
151.
2
⎝2
⎠
Dalla quale, integrando tra i valori di corrente nulla (ad inizio fenomeno) ed i valori
generici I 1 ed I 2 si ha che:
I1 I 2
UM =
∫∫ dU
M
=
0 0
1
1
L1 I 12 + L1 I 12 + M 12 I 1 I 2
2
2
152.
Questa relazione è molto importante in quanto ci fa capire che oltre ad una energia dovuta
ad ogni singolo circuito su se stesso, è presente un termine (M 12 I1 I 2 ) energetico che
giustifica l’erogazione di energia (da parte dei generatori) dovuta all’interazione tra i
circuiti. Questo termine, utilizzando la già citata uguaglianza tra i coefficienti di mutua
induzione, può essere riscritto come:
M
M
1
1
M 12 I 1 I 2 = 12 I 1 I 2 + 12 I 1 I 2 = M 12 I 1 I 2 + M 21 I 1 I 2
153.
2
2
2
2
Andando a sostituire questo risultato nell’energia magnetica e indicando con la
notazione M 11 ≡ L1 e M 22 ≡ L2 si ha che:
1
1
1
1
U M = M 11 I 12 + M 22 I 22 + M 12 I 1 I 2 + M 21 I 1 I 2
154.
2
2
2
2
Appare, dunque, chiaro che nel caso in cui i circuiti fossero N (e non due), si potrebbe
scrivere l’energia magnetica in forma più compatta, utilizzando il simbolo di sommatoria:
UM =
1
2
N
∑M
I Ij
i, j i
155.
i , j =1
Ricordando che il nostro scopo è quello di risolvere l’incongruenza che abbiamo
individuato all’inizio del paragrafo, è necessario fare altri rimaneggiamenti per giungere all
forma a noi utile dell’energia magnetica. Ritornando alla forma scritta per due circuiti
possiamo raccogliere a fattore le correnti in questo modo:
1
1
U M = I 1 (M 11 I 1 + M 12 I 2 ) + I 2 (M 22 I 2 + M 21 I 1 )
156.
2
2
A questo punto possiamo notare che:
r
- M 11 I 1 = L1 I 1 = Φ1 B1 : flusso concatenato con il circuito 1 prodotto dal campo
magnetico del circuito 1;
r
- M 12 I1 = Φ1 B2 : flusso concatenato con il circuito 1 prodotto dal campo
magnetico del circuito 2;
r
- M 22 I 2 = L2 I 2 = Φ 2 B2 : flusso concatenato con il circuito 2 prodotto dal
campo magnetico del circuito 2;
r
- M 21 I 2 = Φ 2 B1 : flusso concatenato con il circuito 2 prodotto dal campo
magnetico del circuito 1;
r r r
Appare chiaro, quindi, che, indicando con B = B1 + B2 , la prima parentesi rappresenta il
flusso concatenato con il primo circuito ad opera del campo magnetico totale, e la seconda
( )
( )
( )
( )
114
Campi variabili nel tempo
Massimiliano Carfagna
è il flusso concatenato con il secondo circuito ad opera del campo totale; quindi:
r
r
1
U M = I 1Φ 1 B + I 2 Φ 2 B
157.
2
Anche in questo caso la generalizzazione della formula ad N circuito è immediata,
cosicche avremo questa nuova scrittura per l’energia magnetica:
N
r
1
UM =
IkΦk B
158.
2 k =1
(
()
∑
( ))
()
A questo punto possiamo riallacciarci al discorso introdotto all’inizio del paragrafo
immaginando di applicare una forza esterna al nucleo ferromagnetico che imprima una
velocità molto piccola, tale da considerare trascurabile l’energia cinetica associata a questo
spostamento virtuale (Principio dei lavori virtuali).
Possiamo scrivere il bilancio energetico per unità di tempo del sistema nel seguente
modo:
r dsr dLG dL R dU M
F⋅
+
+
=
159.
dt
dt
dt
dt
Nella quale le singole quantità corrispondono alle:
r dsr
- F ⋅ : lavoro (positivo) compito dall’esterno sul sistema per unità di tempo
dt
dLG
= If : lavoro (positivo) compiuto dal generatore per unità di tempo;
dt
dLR
= − RI 2 : lavoro (negativo) compiuto dalla resistenza per unità di tempo;
dt
r ⎞ 1 dΦ
dU m d ⎛ 1
= ⎜ I ⋅Φ B ⎟ = I ⋅
: energia magnetica totale del sistema.
dt
dt ⎝ 2
dt
⎠ 2
Sostituendo le diverse quantità con i propri segni all’interno della relazione precedente si
giunge a dire che:
r dsr 1 dΦ
=
F⋅
I − If + RI 2
160.
dt 2 dt
Ricordando che per un singolo circuito RL si può scrivere che:
dΦ
dΦ
f −
= RI ⇒ f = RI +
161.
dt
dt
si giunge alla:
r dsr 1 dΦ
dΦ
1 dΦ
F⋅
I − RI 2 −
I + RI 2 = −
=
I
162.
dt 2 dt 14
dt4
2 dt
424
3
()
contributo del generatore
E quindi si può notare che il generatore, oltre a compensare le dissipazioni per effetto Joule
della resistenza, apporta un contributo doppio in modulo ed opposto in segno rispetto alla
variazione di energia magnetica. Ecco spiegato l’arcano: questo è il motivo per cui
l’energia finale, nell’esempio visto all’inizio del paragrafo, è maggiore di quella iniziale.
In effetti non è così in quanto non si è tenuto conto dell’energia erogata dal generatore.
115
Campi variabili nel tempo
Massimiliano Carfagna
Analizziamo la cosa più in dettaglio: dalla relazione appena scritta ci si accorge che il
generatore compensa totalemnet l’energia dissipata dalle resistenze, mentre eroga una
energia supplementare che è esattamente il doppio di quella magnetica, infatti:
dLest dU M
dU M
=
+2
163.
dt
dt
dt
Allora, se non venisse fatto alcun lavoro dall’esterno (Lest = 0 ) e se indichiamo con
∆U M = U M , f − U M , i e con ∆LG la differenza di lavoro fatta dal generatore, si ha che:
∆LG + ∆U M = 0
164.
Ma abbiamo appena detto che il generatore compie un lavoro che è doppio rispetto
all’energia magnetica, per cui, sostituendo si ha che:
∆LG + ∆U M = −2∆U M + ∆U M = − ∆U M
165.
A questo punto possiamo renderci conto che, se nel circuito da noi considerato è
presente un’energia magnetica, allora ci sarà una corrispettiva forza magnetica la quale
provocherà delle azioni meccaniche sul circuito stesso. Come fare per calcolarle?
Nel caso del solenoide abbiamo visto che il lavoro per unità di tempo della forza
agente dall’esterno si è dimostrato essere uguale all’opposto della variazione di energia
magnetica. Il lavoro per unità di tempo svolto dalla forza magnetica, quindi, deve
corrispondere, in modulo al lavoro per unità di tempo fatto dalla forza esterna, ma deve
essere di segno opposto, riassumendo:
r
dU M
⎧ r ds
⎪⎪ F ⋅ dt = − dt
r dsr dU M
F
⇒
=
166.
r
⎨r
M ⋅
r dsr
d
s
dt
dt
⎪F ⋅
= −F ⋅
⎪⎩ M dt
dt
r
Scrivendo esplicitamente il vettore ds dt e manipolando il secondo membro si ha che:
r ⎛ dx dy dz ⎞ ∂U M dx ∂U M dy ∂U M dz
FM ⋅ ⎜ , , ⎟ =
⋅ +
⋅ +
⋅
167.
∂x dt
∂y dt
∂z dt
⎝ dt dt dt ⎠
E quindi, per identità dei coefficienti possiamo scrivere la forza magnetica per componenti
nel seguente modo:
∂U M
∂U M
∂U M
FMx =
; FMy =
; FMz =
168.
∂x I =cos t
∂y I =cos t
∂z I =cos t
A questo punto possiamo applicare le considerazioni svolte al problema posto
inizialmente: consideriamo un solenoide di lunghezza l costituito da N spire di area S e
percorse da una corrente I . Nel solenoide viene inserito un nucleo di ferro dolce e le
condizioni di lavoro sono tali che si può porre, per il nucleo, B = µ r µ 0 H . Vogliamo sapere
con quale forza il nucleo viene attratto dentro il solenoide.
Per risolvere il quesito possiamo utilizzare considerazioni del tutto energetiche, già fatte
116
Campi variabili nel tempo
Massimiliano Carfagna
all’inizio del paragrafo: chiameremo x la direzione sulla quale agisce la forza, ed è chiaro
che l’energia magnetica può essere così scritta:
1
U M = LI 2
169.
2
Ma in questo caso il coefficiente di autoinduzione deve tener conto del fatto che il
solenodie è pieno del materiale di ferro dolce solo per un tratto x , mentre risulta essere
vuoto per il tratto l − x , per cui si ha che:
2
2
2
⎞
1 ⎛⎜
1 ⎛N⎞
⎛N⎞
⎛N⎞
⎟
U M = µ 0 µ r ⎜ ⎟ Sx + µ 0 ⎜ ⎟ S (l − x ) I = µ 0 ⎜ ⎟ SI (l + (µ r − 1)x )
170.
⎟
2 ⎜⎝
2 ⎝l⎠
⎝l⎠
⎝l⎠
⎠
Dunque, derivando rispetto alla x , otterremo la forza cercata:
2
r
1 ⎛N⎞
x
171.
FM ≡ FM = µ 0 ⎜ ⎟ SI (µ r − 1)
2 ⎝l⎠
VII.11.
Quarta equazione di Maxwell
Già in precedenza si è accennato al fatto che la quarta equazione di Maxwell non è
valida nel caso non stazionario. Dato che in questo capitolo sono stati affrontati problemi
dipendenti dal tempo (quindi non stazionari) è giunto il momento di rendere anche la
quarta equazione di Maxwell valida nel caso più generale.
Come prima cosa ricordiamo l’equazione in questione: essa dice che il rotore del
campo di induzione magnetica è uguale al prodotto della densità di corrente (di
conduzione) per la costante di permeabilità magnetica nel vuoto:
r r
r
∇ × B = µ0 J
172.
Possiamo mostrare che essa non è valida nel caso non stazionario in due modi
differenti:
1. Applichiamo l’operatore divergenza ad ambo i membri dell’equazione in
r r r
r
r
questione, ed otteniamo che: ∇ ⋅ ∇ × B = ∇ ⋅ µ 0 J = 0 (perchè la divergenza del
r r
rotore di un qualsiasi vettore è nulla) , ma d’altra parte ∇ ⋅ J = 0 ⇔ ∂ρ ∂t = 0 ,
per via dell’equazione di continuità. La condizione ∂ρ ∂t = 0 è valida solo nel
caso in cui ρ ≠ ρ(t ) , ossia la densità di carica è costante nel tempo e quindi ci
troviamo in regime stazionario.
2. Applichiamo il teorema della circuitazione di Ampere (forma integrale della
quarta equazione di Maxwell) ad un circuito in cui circola corrente dipendente
dal tempo, e scegliamo come linea chiusa l una linea che forma un piano
ortogonale alle facce del condensatore; su essa costruiamo due superfici S 1 ed
r
S 2 e calcoliamo il flusso di B attraverso queste due superfici, considerando che
la prima include il conduttore in cui passa la corrente, la seconda non lo
r
r r r
include. Dato che il teorema di ampere dice che: Bdl = ∇ × B dS = µ 0 I è
(
)
( )
∫
l
∫(
)
S
chiaro che esso deve vale per qualsiasi superficie si prende, e quindi per
qualsiasi superficie deve dare lo stesso risultato. In realtà se lo calcoliamo su S 1
117
Campi variabili nel tempo
Massimiliano Carfagna
il risultato è diverso da zero perchè S 1 è attraversata da corrente, mentre se lo si
calcola su S 2 il risultato è nullo perchè non c’è corrente in quella regione di
spazio. Questa considerazione mostra che il teorema ha qualche problema,
quindi, dato che questo teorema può essere visto come la forma integrale della
quarta eq.ne di Maxwell, è necessario rivedere anch’essa.
A questo punto, quando lo stesso Maxwell si accorse di tali incongruenze, propose
una geniale modifica, la quale prendeva piede proprio dall’equazione di continuità; essa
prevede che:
r r ∂ρ
∇⋅ J +
=0
173.
∂t
r r
Sostituiamo al suo interno la prima equazione di Maxwell, secondo la quale ∇ ⋅ E = ρ ε 0 ,
ottenendo che:
r r
∂ r r
∇ ⋅ J + ε0
∇⋅E = 0
174.
∂t
Invertendo l’ordine di derivazione al secondo addendo del primo membro (per via del
teorema di Swartz) e raccogliendo tutto sotto il segno di differenziaione, possiamo scrivere
che:
r
r
r r
r ∂E
r⎛ r
∂E ⎞
⎟=0
= 0 ⇒ ∇⎜⎜ J + ε 0
∇ ⋅ J + ε 0∇ ⋅
175.
∂t ⎟⎠
∂t
⎝
Dalla quale si ricava che il vettore tra parentesi ha due importanti caratteristiche:
r
1. Nel caso stazionario si ha che ∂E ∂t = 0 e quindi ci si riduce alla sola densità di
r
corrente di conduzione J ;
2. Il vettore in questione ha la proprietà di essere solenoidale (divergenza nulla) in
ogni situazione.
Dunque la quantità aggiuntiva alla corrente di conduzione ha pieno diritto di entrare a far
parte del regno delle quantità di rilievo in un sistema fisico, e, ad essa, è stato dato il nome
r
di densità di corrente di spostamento J s , mentre integrando su una qualsiasi superficie S
(quindi, calcolando il suo flusso) si otterrà la cosiddetta corrente di spostamento I s per
cui:
r
r r
∂E r
I s = J s dS = ε 0
dS
176.
∂t
(
∫
S
)
∫
S
A questo punto possiamo scrivere la quarta equaizone di Maxwell nel caso non stazionario
semplicemente andando ad aggiungere il termine derivante dalla corrente di spostamento a
secondo membro, ovverosia scriveremo che:
r
r r
⎛r
∂E ⎞
⎟
∇ × B = µ 0 ⎜⎜ J + ε 0
177.
∂t ⎟⎠
⎝
Essa è valida anche nel caso stazionario in quanto, in questo caso risulta uguale a zero la
derivata temporale del campo elettrico (condizione verificata in caso di stazionarietà).
A questo punto, dopo aver fatto questa modifica, possiamo applicare di nuovo il
teorema della circuitazione di Ampere al caso precedente del condensatore, per vedere se
118
Campi variabili nel tempo
Massimiliano Carfagna
è stata risolta l’incongruenza rilevata precedentemente.
Abbiamo detto in precedenza che la quantità tra parentesi a secondo membro della
quarta equazione di Maxwell appena scritta rappresenta un vettore solenoidale; ciò implica
che il flusso di esso attraverso una qualsiasi superficie chiusa è nullo; quindi possiamo
r r
calcolare il flusso dei vettori J e J s attraverso una qualsiasi superficie S costruita su l :
r r r
r r
r r
J + J s dS = JdS + J s dS = 0
178.
∫(
)
∫
S
∫
S
S
A questo punto, per via dell’arbitrarietà di S possiamo scegliere come superfici quelle già
precedentemente enunciate:
n̂ 1
S1
r
r
J = Jc
r
Js
l
S2
Applicazione del teorema della circuitazione di
Ampere
∫
r
JdS ⋅ n̂1 +
S1
∫
r
J s dS ⋅ n̂2 = 0
179.
S2
Ma le due normali sono opposte in verso, quindi i due integrali sono uguali ed opposti:
r
r
− JdS ⋅ n̂1 + J s dS ⋅ n̂2 = 0 ⇒ I c = I s
180.
∫
∫
S1
S2
Questo dimostra che la corrente di conduzione e la corrente di spostamento sono uguali,
quindi nell’applicare il teorema di Ampere, in precedenza, risultava:
r r r
r r r
∇ × B dS = µ 0 I s ;
∇ × B dS = 0
181.
∫(
)
∫(
S1
)
S2
Mentre utilizzando l’equazione di Maxwell nella forma generale si ha che:
r r r
r r
r r
r r
⎧ ∇
× B dS = JdS + J s dS = J dS = µ 0 I c
⎪
r r r
S1
S2
S1
⎪ S1
⇒
I
=
I
⇒
∇
× B dS = µ 0 I
⎨ r r r
c
s
r r
r r
r r
⎪ ∇ × B dS = JdS + J s dS = J s dS = µ 0 I s
S
⎪
S1
S2
S2
⎩S 2
∫(
∫(
)
)
∫
∫
∫
∫
∫
∫(
∫
119
)
182.
Campi variabili nel tempo
Massimiliano Carfagna
A conclusione di quanto affermato durante tutto l’arco di questi appunti e dei
precedenti è giunto finalmente il momento di racchiudere in maniera compatta ed unitaria
tutte le equazioni di Maxwell scritte nel caso più generale (non stazionario), sia nel vuoto,
sia nella materia:
r r ρ
r r
;
∇⋅E =
∇⋅D = ρ
r r ε0
r r
;
∇⋅B = 0 r
∇⋅B = 0 r
r r
r r
183.
∂B
∂B
; ∇× E = −
∇× E = −
∂t
∂t r
r
r r
r
r
r
r
∂D
∂E
; ∇× H = J +
∇ × B = µ 0 J + ε 0µ 0
∂t
∂t
È doveroso ricordare che:
r
r
r r
r
r
B
D = ε0 E + P ; H =
−M
184.
µ0
Il fatto che in almeno quattro delle otto equazioni di Maxwell compaiano
contemporaneamente quantità riferite sia al campo magnetico, sia al campo elettrico (o i
loro corrispettivi nella materia) fa capire che esse possono considerarsi equazioni
differenziali accoppiate, e ciò giustifica anche il termine di campo elettromagnetico
(termine che sottolinea il fatto che non si possono studiare fenomeni elettrici prescindendo
dalla loro componente magnetica e viceversa)
120
Campi variabili nel tempo
Massimiliano Carfagna
121
Correnti alternate
Massimiliano Carfagna
VIII.
VIII.1.
Correnti alternate
Premessa
Fino a questo punto, ogni qual volta si è parlato di correnti variabili nel tempo non
si è mai specificato in cosa consistesse questa variabilità. Molte volte, soprattutto nei casi
in cui veniva applicata la legge di Faraday – Neumann, la varibilità della corrente seguiva
leggi temporali assai semplici, come, ad esempio, proporzionalità dirette con il tempo.
In generale, però, mediante opportuni dispositivi detti generatori di correnti
alternate, è possibile produrre delle correnti che posseggono le seguenti caratteristiche:
1. Riassumono uno stesso valore dopo che è trascorso un certo tempo T
(grandezza periodica);
2. Variano nel tempo seguendo un andamento sinusoidale;
3. Il loro valor medio su un periodo è nullo (grandezza alternata)
Nel seguito ci soffermeremo meglio su ognuno di questi singoli aspetti, in ogni
caso la differenza sostanziale, che si riscontra anche matematicamente, tra un circuito in
corrente continua (DC) ed un circuito in corrente alternata (AC) risiede proprio nel fatto
che nel primo, il termine noto dell’equazione integro-differenziale associata al circuito, è
un valore costante (ossia la f.e.m. del generatore è sempre la stessa al variare del tempo),
mentre nel secondo il termine noto è una funzione del tempo, e per quanto detto in
precedenza, in linea di massima questa funzione possiede le caratteristiche di essere
periodica e alternata (la condizione di sinusoidalità può anche non essere considerata
indispensabile, in quanto vedremo che qualsiasi f.e.m. periodica e alternata, seppur non
sinusoidale, può sempre essere sviluppata in serie di Fourier ed essere così rapportata ad
una funzione sinusoidale o cosinusoidale)
Per chiare meglio i concetti sovraesposti durante tutto questo capitolo utilizzeremo
come esempio – guida un cicuito RLC alimentato da f.e.m. variabile nel tempo e lo
rappresenteremo nel seguente modo:
122
Correnti alternate
Massimiliano Carfagna
L’equazione del circuito RCL (serie) è molto simile a quella del circuito RL (serie),
alla quale va aggiunta una ulteriore caduta di tensione dovuta al condensatore, infatti ai
capi del condensatore si misura, in genere, una d.d.p. pari a ∆V = Q C , ma dato che la
carica non è altro che l’integrale rispetto al tempo della corrente circolante nel circuito,
avremo che l’equazione del circuito sarà la seguente:
dI 1
Idt = RI (t )
f (t ) − L −
185.
dt C
La quale è una equazione integro – differenziale nella variabile t , che può essere studiata
in modo del tutto equivalente, derivando rispetto al tempo ambo i membri (così da
eliminare l’integrale):
d 2I
dI 1
df
186.
L 2 + R + ⋅I =
dt C
dt
dt
Appare evidente che la sua soluzione dipenderà dalla funzione f (t ) la quale deve
essere nota a priori: infatti è proprio questo il termine che descrive matematicamente la
variazione della tensione ai capi del circuito, quindi sarà proprio questa funzione
l’elemento di maggior interesse nell’analisi circuitistica in AC.
A questo punto analizziamo in dettaglio l’equazione differenziale appena scritta:
essa è una ODE (Ordinary Differential Equation) del secondo ordine a coefficienti costanti
non omogenea nella variabile t . La sua soluzione si comporrà, per via del principio di
sovrapposizione, di una serie di addendi dovuti alla soluzione dell’omogenea associata,
con in più la soluzione particolare della non omogenea.
Vogliamo dimostrare, a conclusione di questa premessa, che in tutti i casi possibili,
la soluzione dell’omogenea non genera un contributo stabile alla corrente circolante nel
circuito, bensì un fenomeno transiente che decade dopo pochi attimi dalla chiusura
dell’interruttore. Dunque ciò che in effetti determina l’andamento della corrente circolante
è proprio la soluzione particolare della non omogenea, la quale dipende unicamente dal
termine noto dell’equazione differenziale trattata.
Come prima cosa risolviamo l’equazione caratteristica dell’omogenea associata:
∫
− R ± R 2 − 4(L C )
R
R 2 4L 1
1
Lα + Rα + = 0 ⇒ α 1,2 =
=−
±
−
⋅
2L
2L
C
4 L2 C 4 L2
⇓
2
187.
R
⎧
γ
=
⎪⎪
2L
α 1,2 = − γ ± ∆ con ⎨
2
⎪∆ = R − 1
⎪⎩
4 L2 LC
Dalla teoria sulla soluzione delle ODE di secondo grado a coefficienti costanti si ricava
che a seconda del valore che assume il discriminante ∆ si ha una soluzione differente per
l’omogenea associata. I casi che possono verificarsi sono i seguenti:
L
2
1. ∆ > 0 ⇒ R > 4 : in questo caso la soluzione dell’omogenea associata è
C
costituita da due esponenziali negativi che decadono rapidamente, e la sua
forma matematica sarà:
123
Correnti alternate
Massimiliano Carfagna
I (t ) = Ae
− α1 t
+ Be
− α2 t
188.
L
: anche in questo caso si ha una cosa simile al caso
C
precedente, infatti, seppur la soluzione dell’omogenea associata ha forma
diversa dal caso precedente, il suo comportamento è sostanzialmente analogo.
La soluzione sarà, dunque:
2
2. ∆ = 0 ⇒ R = 4
I (t ) = ( A' + B' t )e
−
R
t
2L
189.
L
: in questo caso ci troviamo di fronte ad una soluzione nel
C
campo complesso (essendo il discriminante negativo), questo vuol dire che
l’equazione caratteristica fornirà due soluzioni complesse che sono le seguenti:
R
R2
1
190.
α1,2 = −
±i
− 2 = − γ ± iω
CL 4 L
2L
Andando a sostituire questi nuovi valori delle radici dell’eq.ne caratteristica
nella soluzione generale già utilizzata nel caso (1.), otterremo che:
I (t ) = A' ' e − γt e iωt + B' ' e − γt e − iωt
191.
Possiamo sfruttare l’identità di Eulero per porre in forma più semplice questa
relazione, e per farlo ricordiamo che e ± iωt = cos(ωt ) ± isin(ωt ) per cui andando
a sostituire il tutto nella relazione precedente e facendo un pò di calcoli si
giunge a dire che:
I (t ) = e − γt [( A' ' + B' ' ) cos (ωt ) + i ( A' ' − B' ' )sin (ωt )] =
192.
= I 0 e − γt [sin (ϕ ) cos (ωt ) + cos (ϕ )sin (ωt )]
avendo posto ( A' ' + B' ' ) = I 0 sin(ϕ) e ( A' ' − B' ' ) = I 0 cos(ϕ) , utilizzando, quindi,
una proprietà trigonometrica fondamentale possiamo ridurre la precedente
equazione nella seguente forma compatta:
I (t ) = I 0 e − γt sin(ωt + ϕ)
193.
La quale non è altro che una sinusoide che si attenua all’aumentare del tempo
con legge esponenziale decrescente.
2
3. ∆ < 0 ⇒ R < 4
∆>0
∆=0
∆<0
Andamento della soluzione generale dell’omogenea
associata all’ODE del circuito RLC (serie in AC)
124
Correnti alternate
Massimiliano Carfagna
Come avevamo accennato all’inizio della nostra analisi, i grafici appena mostrati
garantiscono che solo i primi attimi di circolazione della corrente sono descritti dalla
soluzione generale dell’ODE trattata, quindi, quando la corrente circola a regime,
l’equazione matematica che regola il suo andamento deve essere ricercata tra le soluzioni
particolari dell’equazione differenziale del circuito. Vedremo come.
VIII.2.
Grandezze alternate
Abbiamo detto che per sapere come si comporta la corrente in un circuito descritto
da una eq.ne differenziale simile a quella trattata nel primo paragrafo, è necessario
analizzare la soluzione particolare dell’equazione differenziale trattata. La soluzione
particolare di una generica equazione differenziale ha la caratteristica di non dipendere
dalle condizioni iniziali (a differenza delle soluzioni generali, che, come abbiamo visto,
dipendono da parametri che possono essere resi espliciti, solo mediante l’imposizione delle
condizioni iniziali). Inoltre la soluzione particolare si determina a partire dal termine noto
dell’equazione differenziale trattata. Questo implica che la forma che assume il termine
noto ha una rilevanza capitale nella determinazione della soluzione particolare.
Fisicamente il termine noto rappresenta la legge con cui viene erogata la tensione
variabile, e questa legge per motivi di varia natura, nell’utilizzo comune di energia
elettrica, presenta le tre caratteristica citate in precedenza che qui approfondiamo:
1. Funzione periodica: una funzione f (t ) si dice periodica di periodo T se
risulta che f (t ) = f (t + T ) . Per una funzione periodica si definiscono le
seguenti quantità:
2π
1
ω
ω=
= pulsazione ; ν = =
= frequenza
194.
T
T 2π
2. Funzione alternata: una funzione f (t ) si dice alternata se è periodica e se il
suo valor medio su un periodo f (t ) è nullo, in cui per valor medio su un
periodo si intende la seguente quaintità:
1 t +T
f (t ) =
f (t )dt
195.
T t
∫
T
f p (t )
f a (t )
Passaggio da una funzione periodica ad una funzione alternata
125
Correnti alternate
Massimiliano Carfagna
Una proprietà importante che lega tra loro le funzioni periodiche a quelle alternate
è la seguente: data una funzione periodica f p (t ) , se ad essa vado a sottrarre punto per
punto il suo valor medio su un periodo f p (t ) , ottengo una nuova funzione f a (t ) che ha lo
stesso andamento della f p (t ) , ma che risulta traslata in modo che l’asse x vada ad
intersecare la nuova funzione proprio sul valor medio della funzione di partenza; dunque
da una funzione periodica si è passati ad una funzione alternata solo mediante una
traslazione, per cui
f a (t ) = f p (t ) − f p (t )
196.
Un’altra caratteristica delle tensioni variabili, che avevamo enunciato all’inizio del
paragrafo, è il fatto che la più comune funzione periodica e alternata utilizzata come
tensione variabile è la :
f (t ) = F0 sin(ωt )
197.
In cui ω è la pulsazione prima definita e F0 è l’ampiezza massima dell’onda. Questa
funzione è una funzione sinusoidale, e conseguenzialemnete essa genererà una corrente a
carattere sinusoidale del tipo:
I (t ) = I 0 sin(ωt + ϕ)
198.
In cui ϕ rappresenta l’angolo di sfasamento ed I 0 l’ampiezza massima di questa sinusoide
(è chiaro che se per qualsiasi ragione di calcolo la corrente non venisse sinusoidale na
cosinusoidale, basta operare opportunamente sull’angolo fase per riportarla alla condizione
di sinusoide).
Cosa accade, però, se il termine noto della nostra equazione differenziale non è una
funzione sinusoidale o cosinudoidale ? A questo punto ci viene in aiuto il Teorema di
Fourier, secondo il quale si ha che:
Teorema di Fourier
Data una funzione f (t ) ed un intervallo sull’asse reale [0 ,T ],
SE
- f (t ) è continua nell’intervallo [0 ,T ];
- f (t ) = f (t + T ) , ossia è periodica di periodo T
- f ' (t ) è continua nell’intervallo [0 ,T ]
ALLORA:
T
⎧
2
⎪ an =
f (t )cos(nωt )dt
∞
T
⎪
a
0
[an cos(nωt ) + bn sin(nωt )] con ⎪⎨
f (t ) = 0 +
199.
T
2
⎪
n =1
2
f (t )sin(nωt )dt
⎪bn =
T
⎪⎩
0
Possiamo notare, però, che tra le ipotesi del Teorema di Fourier manca la
condizione secondo la quale f (t ) sia alternata, ma la cosa non è molto importante in
∫
∑
∫
126
Correnti alternate
Massimiliano Carfagna
quanto abbiamo detto che una funzione alternata f a (t ) si costruisce a partire da una
funzione periodica f (t ) semplicemente mediante la
f a (t ) = f (t ) − f (t )
200.
A questo punto possiamo notare che il termine a0 2 dello sviluppo di Fourier corrisponde
esattamente al valor medio della funzione periodica su un periodo, ovverosia:
a0 1
=
2 T
T
∫ f (t )dt =
f (t )
201.
0
Dunque non ci rimane che sostituire quest’ultimo risultato e lo sviluppo di Fourier nella
relazione che definisce f a (t ) , ottenendo che la nostra funzione alternata sarà:
f a (t ) = f (t ) − f (t ) =
∞
∑[a cos(nωt ) + b sin(nωt )]
n
n
202.
n =1
VIII.3.
Il metodo simbolico
Il metodo simbolico è un metodo di analisi sviluppato in modo da poter risolvere i
circuiti in AC esattamente nello stesso modo nel quale si risolvono i circuiti in DC, ma con
diverse quantità e con l’utilizzo dei numeri complessi.
Il tutto si basa sul seguente concetto: in precedenza abbiamo visto che la f.e.m. del
generatore in alternata può essere sempre scritta come
f (t ) = F0 sin(ωt )
203.
cosicchè essa genererà una corrente del tipo
I (t ) = I 0 sin(ωt + ϕ)
204.
Il metodo simbolico ci impone, come prima cosa, di trasformare (mediante opportuni
sfasamenti) una grandezza sinusoidale in una grandezza cosinusoidale, cosicchè, ad
esempio, la corrente precedente diventa
I (t ) = I 0 cos(ωt + ϕ)
205.
In cui ϕ è diversa da quella precedente, ma per non appesantire la notazione utilizziamo la
stessa lettera.
Successivamente si associa alla grandezza in questione una grandezza complessa fittizia
della forma seguente:
I c (t ) = I 0 [cos(ωt + ϕ) + isin(ωt + ϕ)] = I 0ei (ωt + ϕ ) = I 0eiϕ eiωt = I 0ceiωt
206.
nella quale si ha che:
I c (t ) = I 0 c e iωt = I (t )
207.
I 0 c = I 0 e iϕ = I 0 (cos ϕ + isinϕ ) = a + ib
Il fatto che abbiamo posto I c (t ) = I (t ) non vuol dire che I c (t ) = I 0 cos(ωt + ϕ) , infatti non
è vero, ma questa notazione tornerà utile in seguito.
Come terzo passo ci proponiamo, a questo punto, di calcolare la tensione ai capi di ogni
singolo elemento di circuito, in modo da ricavare che:
(
127
)
Correnti alternate
Massimiliano Carfagna
[
]
dI
d
⎧
iωt
iωt
⎪V L (t ) = L dt = L dt I 0c e = LiωI 0c e = iωLI (t )
⎪
I
I 1 iωt
1
1
1
⎪
Idt =
I 0 c e iωt dt = 0 c e iωt dt = 0c
e =
I (t )
208.
⎨VC (t ) =
C
C
C
C
C
i
i
ω
ω
⎪
⎪V R (t ) = RI (t )
⎪
⎩
Possiamo quindi, scrivere in forma più compatta le nostre relazioni introducendo una
r
nuova quantità: l’impedenza Z che indichiamo con il simbolo di vettore, in quanto è
numero complesso, il quale, a seconda dei casi, può essere un numero reale, un
immaginario puro oppure un complesso completo. L’impedenza viene definita così come
era stata definita la resistenza nel caso dei conduttori ohmici, infatti se riscriviamo le
precedenti relazioni come:
r
r r
r
VL = Z L ⋅ I con Z L = iωL
r
r r
r
1
VC = Z C ⋅ I con Z C =
209.
iω C
r
r r
r
VR = Z R ⋅ I con Z R = R
In cui i simboli di vettore stanno ad indicare che sono tutte quantità rappresentabili nel
piano di Gauss (piano complesso).
Appare dunque evidente l’analogia con la legge di Ohm, tanto più se si considera che le
impedenze si comportano esattamente nello stesso modo delle resistenze, e ciò vuol dire
che, se ci si trova di fronte ad una serie di elementi semplici o di fronte ad un parallelo
basta dire che:
n
r
r
impedenze in serie
Zs =
Zi
∫
∫
∫
∑
1
=∑ r
Z
i =1
210.
n
1
r
impedenze in parallelo
Zp
i
i =1
Quindi possiamo concludere dicendo che un qualsiasi circuito in corrente alternata può
essere risolto mediante l’applicazione della seguente relazione:
r r r
V = Ze ⋅ I
211.
r
Nella quale il Z e rappresenta l’impedenza equivalente del circuito, calcolata mediante le
relazioni appena scritte, inoltre, essendo anch’essa un vettore nel piano complesso,
possiamo anche scriverla nel seguente modo:
r
Z e = R + iX
212.
In cui il termine R corrisponde alla resistenza equivalente del circuito (ricordiamo che
l’impedenza di una resistenza è un numero reale e non complesso), mentre X è detta
reattanza.
VIII.4.
Analisi del circuito RLC (serie in AC)
128
Correnti alternate
Massimiliano Carfagna
È giunto finalmente il momento di analizzare in maniera piuttosto dettagliata il
comportamento di un circuito RLC in serie sottoposto ad una tensione sinusoidale ed
alternata del tipo f (t ) = F0 sin(ωt + ϕ F )
Per procedere con questa analisi ci avvarremo del metodo simbolico introdotto
pocanzi, in modo da poter snellire, per quanto possibile, i conti.
Un circuito RLC presenta una equazione del tipo:
dI 1
f (t ) − L −
Idt = RI (t )
213.
dt C
Dunque sostituendo il valore da noi assunto per la tensione e derivando tutta la relazione
rispetto al tempo otteniamo che:
d 2I
dI 1
214.
L 2 + R + ⋅ I = F0 ω cos(ωt )
dt
dt C
La soluzione di questa equazione differenziale (trascurando la soluzione
dell’omogenea associata che, per quanto detto nel primo paragrafo, non ha alcun valore
fisico quando la corrente gira a regime nel circuito), per quanto affermato durante l’arco di
tutto il capitolo, consiste in una corrente del tipo I (t ) = I 0 sin(ωt + ϕ I ) in cui il valore
dell’ampiezza I 0 della corrente e il valore della fase ϕ sono gli unici parametri da
determinare.
Per la determinazione delle costanti si può procedere nel modo classico (derivare la
corrente due volte e sostituire il tutto nell’ODE di partenza) oppure si può applicare il
metodo simbolico, optiamo per questa seconda scelta.
Come prima cosa calcoliamo l’impedenza equivalente del circuito: essa sarà data
dalla serie delle:
r
r
r
r
i
1
= R + iω L + 2
=
Z e = Z R + Z L + Z C = R + iωL +
iωC
i ωC
⇓
215.
r
1 ⎞
⎛
Z e = R + i ⎜ ωL −
⎟ = R + iX
ωC ⎠
⎝
A questo punto non ci rimane che applicare la legge di Ohm per correnti alternate,
ovverosia possiamo scrivere che
r
r r r
r V
F0 e iϕF e iωt
V = Ze ⋅ I ⇒ I = r =
216.
R + iX
Ze
r
r
Ma cosa dobbiamo inserire al posto di V e di Z e ? Affinchè tutto fili liscio è necessario
che quello appena citato sia un rapporto tra quantità complesse; sappiamo che l’impedenza
è già un vettore complesso, si tratta quindi, solo di trasformare la nostra tensione in una
grandezza complessa, così come è stato fatto nel precedente paragrafo con la corrente:
dobbiamo, quindi, pensare alla f (t ) , espressa in funzione del coseno, per cui scritta come
f (t ) = F0 sin(ωt + ϕ F ) = F0 cos(ωt + ϕ F + π 2) , come la componente reale di un vettore
complesso, ed associare ad essa una seconda componente complessa, cosicchè avremo la:
∫
129
Correnti alternate
Massimiliano Carfagna
r
f (t ) = f (t ) + if y (t ) = f x (t ) + if y (t ) =
= F0 (cos(ωt + ϕ F + π 2) + isin(ωt + ϕ F + π 2 )) =
217.
r i ωt
i ( ωt + ϕ F + π 2 )
i ( ϕ F + π 2 ) i ωt
= F0 e
= F0 e
e = F0 c e
Dobbiamo, inoltre, specificare che l’impedenza complessa può essere scritta in modo
esplicito nel seguente modo:
⎧Z = R 2 + X 2
r
⎪ e
Z e = R + iX = Z e (cos ϕ e + isinϕ e ) = Z e e iϕe con ⎨
218.
⎛X⎞
⎪ϕ e = arctg ⎜ ⎟
⎝R⎠
⎩
Per cui sostituendo tutte queste quantità nella legge di Ohm si ottiene che:
r
r
r
r iωt F0c e iωt
r
F0 e i (ϕ F + π 2 )
f (t )
⇒ I 0c =
I (t ) = r ⇒ I 0c e = r
Z e e iϕe
Ze
Ze
⇓
219.
r
F
I 0 c = 0 e i (ϕ F − ϕ e + π 2 )
Ze
Per la definizione stessa di corrente assegnata nel paragrafo sul metodo simbolico si ha
che, confrontando i coefficienti con la precedente relazione, otterremo che:
r
⎧ I 0 c = I 0 e iϕ I
F
F0
I0 = 0 =
⎪
220.
Z0
F0 i (ϕ F −ϕe + π 2 ) ⇒
⎨r
R2 + X 2
⎪I 0c = Z e
ϕ I = ϕ F − ϕe + π 2
e
⎩
Siamo giunti, quindi, alla conclusione: abbiamo ricavato le quantità che consideravamo
incognite, con l’unico dettaglio che la fase è stata espressa in maniera poco elegante,
quindi, mediante una opportuna scelta della fase iniziale ϕ F , è possibile rendere la fase
finale della corrente I più esplicita: poniamo ϕ F = − π 2 , si avrà quindi che:
1 ⎞
⎛
⎜ ωL −
⎟
⎛X⎞
⎛ X⎞
ωC ⎟
ϕ I = −ϕ e ⇒ ϕ I = − arctg ⎜ ⎟ = arctg ⎜ − ⎟ = arctg ⎜ −
⎜
⎟
R
⎝R⎠
⎝ R⎠
⎜
⎟
⎝
⎠
221.
⇓
π
⎛ (1 ωC ) − ωL ⎞
si ha ϕ I = arctg ⎜
⎟
R
2
⎝
⎠
In definitiva la corrente circolante nel circuito alimentato con una f.e.m. pari a
f (t ) = F0 sin(ωt − π 2) è pari a:
per ϕ F = −
⎡
F0
I (t ) = I 0 sin(ωt + ϕ I ) = ⎢
⎢ R 2 + (ωL − (1 ωC ))2
⎣
in cui ω = 2 π T .
130
⎤ ⎛
(1 ωC ) − ωL ⎞ ⎞⎟
⎥ sin⎜⎜ ωt + arctg ⎛⎜
⎟⎟
R
⎥ ⎝
⎝
⎠⎠
⎦
222.
Correnti alternate
Massimiliano Carfagna
Questa relazione è molto importante, in quanto ci fa capire che la corrente
circolante dipende da due fattori:
1. Elementi del circuito, ovverosia l’entità di resistenza, induttanza e capacità;
2. Pulsazione dell’onda, ma quindi, anche dal periodo dell’onda.
Riteniamo opportuno soffermarci su come varia il comportamento della corrente
nel circuito al variare del periodo dell’onda, e per fare questo potremmo seguire due
strade: potremmo studiare la funzione I = I (ω) e vedere il suo andamento, oppure
potremmo analizzare separatamente l’andamento di I 0 = I 0 (ω) e di ϕ I = ϕ I (ω) e metterlo
successivamente a confronto. Seguiremo questa seconda strada.
Le funzioni di nostro interesse saranno quindi le seguenti:
F0
⎛ (1 ωC ) − ωL ⎞
; ϕ I (ω) = arctg ⎜
I (ω) =
⎟
223.
2
R
⎠
⎝
R 2 + (ωL − (1 ωC ))
Qui di seguito rappresentiamo l’andamento dell’ampiezza della corrente in funzione della
pulsazione, e si può notare che essa ha un massimo per il valore ω max = 1 LC = ω 0 :
I 0 (ω )
I 0 ,max
∆ω
2
ω max = ω 0
ω
Curva di risonanza del circuito RLC: andamento della
massima corrente in funzione della pulsazione.
La massima pulsazione che la corrente può assumere è detta pulsazione di risonanza ω 0 ,
e quando nel circuito circola una corrente la cui ampiezza massima è I 0 ,max si dice che il
circuito è in condizioni di risonanza.
A questo punto poniamoci alcune domande:
1. Come si possono realizzare le condizioni di risonanza di un circuito? La
risposta è semplice, basta portare il periodo della tensione al valore che soddisfa
2π
2π
=
la seguente relazione: T =
ω0
LC
2. Come si modificano le quantità tipiche del circuito quando esso lavora in
condizioni di risonanza? Andiamo a sostituire la pulsazione di risonanza nelle
131
Correnti alternate
Massimiliano Carfagna
quantità tipiche della corrente, ed otterremo che:
F
I 0 = I 0 ,max = 0 ϕ I = 0 Z = R
R
Nella pratica di laboratorio si associa, convenzionalmente, ad ogni circuito un
fattore di merito Q definito come:
ω
Q= 0
224.
∆ω
in cui ∆ω = ω 2 − ω1 è la larghezza dell’intervallo di pulsazione tale per cui il valore della
corrente risulta essere I Q = I 0 ,max 2 (vedi figura precedente).
In generale possiamo notare che lavorare in condizioni di risonanza ci permette di
ridurre l’impedenza ad un solo fattore resistivo, ossia si annullano completamente le
impedenze dell’induttore e del condensatore. D’altra parte, però, stiamo facendo passare
nel circuito una corrente che risulta essere pari al massimo sopportabile dagli elementi del
circuito stesso, ciò vuol dire che un minimo aumento di intensità massima provocherebbe
un collasso degli elementi del circuito (soprattutto dell’induttore e del condensatore).
Nella progettazione di qualsiasi circuito, quindi, è necessario tener con della
pulsazione di risonanza, in quanto solo in questo modo si evita di bruciare i componenti
nel caso di correnti le cui ampiezze massime sono troppo elevate.
132
Onde elettromagnetiche
Massimiliano Carfagna
IX. Onde elettromagnetiche
IX.1. Considerazioni introduttive
Già in precedenza avevamo accennato al fatto che per via di una serie di fenomeni
r
e di elementi teorici, era possibile considerare il campo elettrico E ed il campo di
r
induzione magnetica B come due facce della stessa medaglia, ovverosia quello che
avevamo chiamato il campo elettromagnetico. Nello specifico, le ragioni per le quali si
introduce questa nuova entità “ibrida” sono le seguenti:
r
r
1. Ogni carica q immersa in un campo E ed in un campo B subisce una forza di
r
r r r
Lorentz pari a F = q E + v × B ;
2. Le equazioni di Maxwell, le quali legano i campi elettrico e magnetico alle
sorgenti che li generano (distribuzioni di cariche ferme o in movimento),
r
r
vedono la presenza tanto di E , quanto di B (o dei corrispettivi campi nella
materia);
3. Come vedremo in seguito, in virtù della teoria della Relatività, l’associazione di
un fenomeno al campo elettrico o al campo magnetico risulta essere dipendente
dal sistema di riferimento dal quale si osserva il fenomeno.
r
r
Queste considerazioni ci inducono a pensare che seppur E e B siano,
matematicamente, due entità distinte, esse, fisicamente si uniscono, manifestandosi
contemporaneamente.
In generale il campo elettromagnetico può essere trattato come entità fisica
indipendente dalle sorgenti che lo hanno generato ed a questa (che è un’altra motivazione
per cui si è introdotto il campo elettromagnetico) conclusione si giunge osservando che:
1. Un campo elettromagnetico può presentarsi in regioni di spazio che non
contengono sorgenti di campo;
2. Il campo elettromagnetico si propaga sottoforma di onda, la quale ha la
particolarità di non aver bisogno di un mezzo materiale per propagarsi.
É importante specificare che nell’interpretazione dei fenomeni elettromagnetici,
tutte le funzioni matematiche che irrompono nella trattazione vengono considerate
continue. Ciò rappresenta una approssimazione , definita anche approssimazione classica
(la quale si contrappone all’analisi quantistica del fenomeno), in quanto le sorgenti di
campo, ovverosia le distribuzioni di carica sono sempre discrete, in quanto le cariche sono
gli elettroni e gli elettroni sono entità che hanno una loro dimensione finita, e seppur uniti
in una distribuzione di cariche, quest’ultima assume una forma “granulare” e non continua,
ciò implica che anche il campo (e tutto ciò che ne deriva) sarà rappresentato da una
funzione discontinua. Proprio da questa questione parte l’analisi quantistica dei fenomeni
(
)
133
Onde elettromagnetiche
Massimiliano Carfagna
elettromagnetici: infatti per le ragioni appena citate, Planck, agli inizi del ‘900, decise di
introdurre il fotone, il quale doveva rappresentare l’unità fondamentale della
quantizzazione del campo elettromagnetico.
A conclusione di questa premessa è necessario fare solo alcune considerazioni sulle
equazioni di Maxwell. Esse, come si sarà potuto notare, rappresentano, in tutto 8 equazioni
scalari, in quanto le prime due sono, per l’appunto, scalari, mentre le altre due sono
vettoriali e dunque, ad ognuna delle due vengono associate 3 equazioni scalari. Ciò
r
dimostra che, essendo in tutto 6 le incognite da ricavare (tre coordinate per il vettore E e
r
tre coordinate per il vettore B ) si deduce che le quattro equazioni di Maxwell non sono
linearmente indipendenti, infatti, come mostreremo tra un attimo, le prime due si possono
ricavare dalle seconde due.
Deduciamo la seconda dalla terza: applichiamo l’operatore divergenza ad ambo i
membri della terza:
r
r r r
r ∂B
r r
∂ r r
225.
∇ ⋅ ∇ × E = −∇ ⋅
⇒ 0 = − ∇⋅B ⇒ ∇⋅B = 0
∂t
∂t
r r r
Da notare che ∇ ⋅ ∇ × E = 0 in quanto la divergenza del rotore di un qualsiasi vettore è
nulla, inoltre è possibile scambiare l’ordine di derivazione a secondo membro per via della
continuità delle funzioni (t. di Shwartz).
Deduciamo, ora, la prima dalla quarta: possiamo applicare anche qui l’operatore
divergenza ottenendo che:
r
r r r r
r r
∂ r r
∂E
⎛ ∂ρ ⎞
∇⋅E ⇒
⇒ 0 = µ 0 ⎜ − ⎟ + ε 0µ 0
∇ ⋅ ∇ × B = ∇ ⋅ µ 0 J + ∇ ⋅ ε 0µ 0
∂t
∂t
⎝ ∂t ⎠
226.
r r
r r ρ
∂
ε 0∇ ⋅ E − ρ = 0 ⇒ ∇ ⋅ E =
⇒
ε0
∂t
(
(
(
)
(
)
)
)
(
(
)
)
IX.2. Eq.ne delle onde elettromagnetiche
Prima di ricavare esplicitamente le equazioni delle onde elettromagnetiche è
necessario fare un riepilogo circa gli strumenti matematici necessari per l’interpretazione
dei fenomeni ondulatori.
Come viene rappresentata matematicamente un’onda? Mediante una funzione
r
f (r ,t ) della posizione e del tempo. Assumendo, per semplicità, che l’onda si propaghi
lungo una sola direzione, ad esempio quella dell’asse x, la funzione diventa f ( x ,t ) , e
affinchè f sia effettivamente un’onda la combinazione spazio temporale deve presentarsi
nella forma ξ = x m vt con v > 0 , ovverosia:
f ( x, t ) = f (ξ ) = f ( x m vt )
227.
In cui l’onda con il – è detta progressiva, quella con il + è detta regressiva. Dobbiamo
notare che la costante v > 0 rappresenta proprio la velocità di propagazione dell’onda, in
quanto: supponiamo che un punto dell’onda si trovi, all’istante t nel punto x , e che dopo
un tempo ∆t si trovi nel punto ∆x , gli argomenti delle funzioni che descriveranno l’onda
dovranno essere, dunque:
134
Onde elettromagnetiche
Massimiliano Carfagna
ξ = x + vt
ξ + ∆ξ = (x + ∆x ) + v(t + ∆t )
228.
Per definizione un onda è tale se il suo profilo, definito dall f (ξ ) trasla senza cambiare di
forma, ovverosia se risulta che:
f (ξ ) = f (ξ + ∆ξ )
229.
E quindi, affinché essa sia verificata deve risultare che gli argomenti siano uguali,
ovverosia:
x ± vt = ( x + ∆x ) ± v(t + ∆t ) ⇒ x ± vt = x + ∆x ± vt ± v∆t ⇒
⇒ 0 = ∆x ± v∆t
230.
⇓
∆x
∆t
Dalla quale risulta chiaramente che v è la costante di propagazione.
È molti importate la definizione di fronte d’onda: esso è il luogo dei punti in cui, ad
un dato istante, la variabile ξ assume lo stesso valore.
Molto spesso le onde sono rappresentate da funzioni periodiche, in questo caso si
dice che l’onda è periodica di periodo T assegnato. La sua rappresentazione matematica
dipende da alcune caratteristiche fisiche dell’onda stessa:
v=±
λ = lunghezza d’onda (periodo spaziale)
T = periodo temporale
2π
k=
numero d’onda
λ
1
ν = frequenza
T
ω = 2πν pulsazione
λ
v = velocità di fase
T
Mediante queste quantità l’onda periodica può essere scritta nei seguenti modi
equivalenti tra loro:
⎛ 2π
(x − vt ) + ϕ ⎞⎟ = A sin ⎛⎜⎜ 2π ⎛⎜ x − t ⎞⎟ + ϕ ⎞⎟⎟ =
f ( x, t ) = A sin ⎜
⎝ λ
⎠
⎝ T ⎝v ⎠
⎠
231.
⎛ ⎛x t⎞
⎞
= A sin ⎜⎜ 2π ⎜ − ⎟ + ϕ ⎟⎟ = A sin (kx − ωt + ϕ )
⎝ ⎝λ T ⎠
⎠
A questo punto non ci resta che ricavare le equazioni delle onde a partire dalle
equazioni di Maxwell. Consideriamo un dielettrico che abbia le seguenti caratteristiche:
• Illimitato, isotropo ed omogeneo
• Elettricamente neutro ρ = 0
r
• Perfetto, quindi isolante J = 0
(
135
)
Onde elettromagnetiche
Massimiliano Carfagna
Per esso le equazioni di Maxwell prendono la sequente forma:
r r
r r
∇⋅E = 0 r ;
∇⋅B = 0 r
r r
r r
232.
∂B
∂E
∇× E = −
; ∇ × B = εµ
∂t
∂t
Applichiamo l’operatore rotore alla terza di Maxwell:
r
r r r
r ∂B
∂ r r
233.
∇ × ∇ × E = −∇ ×
= − ∇× B
∂t
∂t
A questo punto ricordiamo la proprietà vettoriale secondo cui:
r r r
r r r r
234.
∇ × ∇ × E = −∇ 2 E + ∇ ∇ ⋅ E
r r
Ricordando che, per la prima di Maxwell, ∇ ⋅ E = 0 , sostituendo si ha che:
r
∂ r r
− ∇2 E = − ∇ × B
235.
∂t
r
Ma al rotore di B possiamo sostituire il secondo membro della quarta di Maxwell, per cui
otterremo che:
r
r
r
r ∂ ⎛ ∂E ⎞
r
∂2E
∂2E
2
2
⎟ = εµ 2 ⇒ ∇ E − εµ 2 = 0
∇ E = ⎜⎜ εµ
236.
∂t ⎝
∂t ⎟⎠
∂t
∂t
Per il campo magnetico si otterrà una equazione del tutto speculare, per cui è possibile
racchiudere le due equazioni differenziali nella seguente scrittura:
r
⎧ 2r
∂2E
⎪∇ E − εµ 2 = 0
⎪
∂t
r
237.
⎨
2
⎪∇ 2 Br − εµ ∂ B = 0
⎪⎩
∂t 2
Esse rappresentano due equazioni differenziali vettoriali alle derivate parziali
disaccoppiate ed omogenee, e sono dette equazioni delle onde elettromagnetiche e la
soluzione di queste equazioni è un’onda che si propaga alla velocità v = 1 εµ
(affermazione che dimostreremo tra un attimo).
(
)
(
(
)
(
(
)
)
)
IX.3. Onde elettromagnetiche piane
L’onda piana è un caso particolarmente semplice da studiare, in quanto, per onda
piana si intende un’onda il cui fronte d’onda sia un piano ortogonale ad uno degli assi di
r
r
riferimento (supponiamo all’asse x ) cosicché i vettori E e B hanno lo stesso valore in
ogni punto del piano, e soprattutto sono indipendenti dalle variabili x e y . Questo vuol
dire che le equazioni delle o.e. si riducono ad una coppia di equazioni entrambe del tipo:
∂2 f
∂2 f
238.
− εµ 2 = 0
∂x 2
∂t
La quale prende il nome di equazione di D’Alabert e la sua soluzione generale è una
equazione del tipo
ϕ (x, t ) = f 1 (x − vt ) + f 2 (x + vt ) = f 1 (ξ ) + f 2 (ξ )
239.
Ossia la somma di un’onda progressiva e di un onda regressiva propagatesi lungo l’asse x
136
Onde elettromagnetiche
Massimiliano Carfagna
con velocità v .
Si dimostra facilmente che, affinché la precedente relazione sia soluzione
dell’equazione di D’Alabert deve risultare che:
2
∂ 2 fi ∂ 2 fi
∂ 2 fi
2 ∂ fi
=
=v
;
con i = 1,2
240.
∂x 2
∂ξ 2
∂t 2
∂ξ 2
Per cui sommando mettendo insieme queste due derivate e confrontandole con
l’equazione di D’Alabert per l’onda piana si ha che:
⎧∂ 2 f
∂2 f
−
=0
εµ
⎪⎪ 2
1
∂x
∂t 2
⇒v=
241.
⎨ 2
2
εµ
⎪∂ f − 1 ∂ f = 0
⎪⎩ ∂x 2 v 2 ∂t 2
A questo punto, nell’ipotesi di onda piana, abbiamo detto che il fronte d’onda è
perpendicolare all’asse , dunque solo le derivate rispetto alla variabile x sopravvivono,
nelle equazioni delle onde. Ciò vuol dire che, a partire dalle equazioni di Maxwell, ciò che
si salva sono le seguenti quantità:
⎧ ∂B x
( c)
⎪ ∂t = 0
r
⎪
r r
r r
∂B y
∂E x
∂B
⎪ ∂E
⇒ ⎨ z =
∇⋅E = 0 ⇒
= 0 (a) ; ∇ × E = −
(d)
∂
∂t
∂x
∂
x
t
⎪
⎪ ∂E y = − ∂B z (e)
⎪⎩ ∂x
∂t
242.
⎧ ∂E x
(f )
⎪ ∂t = 0
r
⎪
r r
r r
∂E y
∂B x
∂E
⎪ ∂B
(g)
⇒ ⎨ z = −εµ
∇⋅B = 0 ⇒
= 0 (b) ; ∇ × B = εµ
x
t
∂t
∂
∂x
∂
⎪
⎪ ∂B y = εµ ∂E z
(h)
⎪⎩ ∂x
∂t
Ognuna di queste relazioni ci fornisce delle informazioni utili per capire come si
comporta l’onda piana nella sua propagazione:
• Dalle relazioni (a), (b), (c), (f) si capisce che le componenti E x e B x sono
costanti nel tempo e nello spazio, dunque non intervengono affatto nel
fenomeno di propagazione, quindi possiamo considerarle nulle.
• Dalle relazioni (d), (e), (g), (h) si deduce che se l’onda ha una componente
E y allora ha anche una componente B z e viceversa.
•
Se si considera un’onda polarizzata linearmente (ovverosia con il campo
elettrico diretto verso una direzione fissa, supponiamo, ad esempio, la
direzione y ) allora si ha che la (d) e la (h) possono uguagliarsi a zero dato
che E z = 0 (essendo E polarizzato lungo y ). Quindi la componente y del
campo magnetico non interviene ne nella propagazione spaziale, ne in
quella temporale, e quindi si considera nulla.
Queste considerazioni ci inducono a pensare che, dato che abbiamo considerato
137
Onde elettromagnetiche
Massimiliano Carfagna
nulle le componenti B x , B y , E x e E z , allora le uniche componenti attive nella
propagazione ondosa sono B z e E y , che sono quindi ortogonali tra loro.
È possibile, prendendo ad esempio la relazione (e), ricavare una relazione tra le
ampiezze delle due componenti attive nella propagazione. La relazione (e), infatti, è una
equazione differenziale le cui soluzioni sono del tipo:
E y = E y (x m vt ) = E y (ξ ) ; Bz = Bz (x m vt ) = Bz (ξ )
243.
Le quali, affinché soddisfino la (e), devono verificarsi le:
∂E y ∂E y
∂B
∂B
=
; − z = −(m v ) z
244.
∂ξ
∂x
∂t
∂ξ
Unendo i due risultati si ottiene una equazione differenziale del primo rodine nella
variabile ξ la quale è facilmente integrabile per quadratura, cosicché si ottiene:
dE y
Ey
dB
= ± v z ⇒ E y = ± vB z ⇒
= ±v
245.
dξ
dξ
Bz
In definitiva possiamo così sintetizzare le informazioni ottenute circa i campi in un
onda elettromagnetica:
• Il campo elettrico e il campo magnetico sono tra loro ortogonali e, a loro
r
volta sono ortogonali alla direzione di propagazione data da v ; ciò può
essere espresso sinteticamente dicendo che:
r r r
246.
E = B×v
• Il rapporto tra i moduli dei campi forniscono la velocità di propagazione
dell’onda, ovverosia:
E
1
=v=
247.
B
εµ
È utile citare il fatto che a volte si esprime il rapporto tra i campi come rapporto tra
E ed H , cosicché si avrebbe che:
µ
µ
E µE
=
=
=
=Z
248.
ε
H
B
εµ
In cui la costante Z prende il nome di impedenza caratteristica del materiale.
È molto importante far notare che, a prescindere dal tipo di onda, la densità di
energia del campo elettrico e la densità di energia del campo magnetico sono uguali punto
per punto, in un onda elettromagnetica. Infatti le due densità sono:
1
1
u E = εE 2 ; u M = µB 2
249.
2
2
Ma sostituendo le relazioni appena ricavate circa i moduli dei due campi, si nota che:
uM =
(
1 E εµ
2
µ
)
2
=
138
2
2
1 E εµ
2
µ
=
1
2
εE 2 = u E
250.
Onde elettromagnetiche
Massimiliano Carfagna
Per cui, in un o.e. la densità di energia associata al campo elettrico è uguale alla densità
di energia associata al campo magnetico.
IX.4. Onde elettromagnetiche nei dielettrici
Per quanto affermato in precedenza la velocità di fase di un’o.e. dipende da ε e da
µ per via della seguente relazione:
v=
1
ν =
1
251.
µε
È anche vero, però, che la velocità di fase è legata alla frequenza dell’onda dalla:
v = λν
252.
Dunque, anche la frequenza dell’onda dipende dalle caratteristiche del dielettrico, in
quanto uguagliando le precedenti formule otterremo che:
253.
λ µε
Come prima ipotesi considereremo un dielettrico perfetto, per il quale, quindi, si
possa dire che µ r ≅ 1 . In questa ipotesi possiamo notare che n ≅ ε r , in quanto
1
⎧
⎪c = µ ε
1
c
v
0 0
⎪
⇒ =
⇒ n = ≅ εr
254.
⎨
1
c
v
c
µ
ε
r
r
⎪v =
=
⎪
µ
ε
µ
ε
µrε r
r r
0 0
⎩
Ciò vuol dire che l’indice di rifrazione è legato alla costante dielettrica relativa del mezzo.
Il nostro scopo, ora, è quello di capire come varia la costante dielettrica in funzione
della frequenza (o della pulsazione dell’onda) a partire da considerazioni microscopiche.
Per farlo ci serviremo delle considerazioni fatte a suo tempo circa la polarizzabilità
di un dielettrico: si era detto che ogni atomo, in corrispondenza di una sollecitazione
elettrica esterna, subiva una polarizzazione per deformazione, il cui momento di dipolo si
poteva scrivere come
2
r
r
r
(
Ze ) r
255.
p = Ze ⋅ r (t ) =
⋅ El = α ⋅ El
k
r
Nella quale El ra il campo elettrico locale che prima era costante ed ora prenderà la forma
sinusoidale; Z era il numero atomico e k una costante di richiamo dovuta alla forza
“elastica” esercitata dalla nube elettronica nei confronti dell’elettrone eccitato.
Nel momento in cui il campo elettrico diventa sinusoidale esso può essere scritto, in
r
r
forma esponenziale, come El (t ) = E0 l e iωt e questo ci porta a schematizzare il fenomeno
mediante lo schema dell’oscillatore armonico forzato, la cui forza è data dal prodotto del
campo locale per la carica totale dell’atomo, e quindi l’equazione sarà:
r
r
r
r
d 2r
dr
256.
m 2 + mγ
+ kr = ZeE 0l e iωt
dt
dt
In cui è stato aggiunto un termine dissipativo in quanto una carica oscillante libera energia.
La soluzione di questa equazione differenziale è la seguente:
139
Onde elettromagnetiche
Massimiliano Carfagna
r
r
r (t ) = R0 e iωt =
r
ZeE0l
e iωt
2
m ω 0 − ω + iωγ
(
)
257.
In cui ω 0 = k m rappresenta la pulsazione di risonanza.
A questo punto possiamo notare che la polarizzabilità elettrica α assume valore
complesso, in quanto, per ciò che è stato detto in precedenza, si ha che:
r
r
2
(
p Zer (t )
Ze )
α= r = r =
258.
m(ω 02 − ω + iωγ )
El
El
Ma, in definitiva, perché ci interessa la polarizzabilità elettrica? Essa è necessaria in
quanto, per un dielettrico perfetto, la costante dielettrica di esprime in funzione della
polarizzabilità elettrica mediante l’equazione di Clausius – Mossoti:
Nα
ε r (α ) =
+1
259.
ε 0 − (Nα 3)
In cui N è il numero di atomi per unità di volume, presenti nel dielettrico. Dato che
n ≅ ε r , appare chiaro che l’indice di rifrazione sarà dato dalla:
N (Ze )
2
m ω 0 − ω + iωγ
2
n=
(
Nα
+1 =
ε 0 − ( Nα 3)
)
+ 1 = n1 + in2
260.
N (Ze )
ε0 −
3m ω 02 − ω + iωγ
Tutto il ragionamento è servito solo a mostrare una dipendenza complessa
dell’indice di rifrazione, ma una dipendenza che include la pulsazione dell’onda
elettromagnetica.
A questo punto è utile sapere quale sia il significato fisico di un indice di rifrazione
complesso della forma n = n1 + in 2 . Scriviamo la componente elettrica di un’o.e.
progressiva che si propaga nel dielettrico, essa sarà:
r r iω ⎛⎜⎝ t − vx ⎞⎟⎠ r iω ⎛⎜⎝ t − nc x ⎞⎟⎠ r iω ⎛⎜⎝ t − n1 −cin2 x ⎞⎟⎠ r iω ⎛⎜⎝ t − nc1 x + inc2 x ⎞⎟⎠
E = E0 e
= E0 e
= E0 e
= E0 e
=
261.
n
n
r iω ⎛⎜ t − c1 x ⎞⎟ − ωn2 x r iω ⎛⎜ t − c1 x ⎞⎟ − βx
⎠
⎠
= E0 e ⎝
e c = E0 e ⎝
e
Essa rappresenta un onda che si propaga con velocità v = c n1 e si attenua seguendo la
r
legge esponenziale E 0 e − β x in cui β è detto fattore di attenuazione.
Oltre alle implicazioni di carattere ondulatorio che l’indice di rifrazione complesso
comporta, è necessario anche analizzare cosa accade alla parte reale ed alla parte
immaginaria di n al variare di ω (e quindi anche di ν ). Senza dilungarci troppo in calcoli
tediosi ed inutili, ci basterà osservare l’andamento qualitativo delle due funzioni seguenti:
n1 (ω ) = Re[n (ω )] ; n 2 (ω ) = Im[n (ω )]
262.
Le quali hanno i seguenti andamenti qualitativi:
2
(
140
)
Onde elettromagnetiche
n1
dn1
>0
dω
Disp. Normale
Massimiliano Carfagna
dn1
<0
dω
n2
dn1
>0
dω
Disp. Anomala
Trasparenza
Disp. Normale
ω
ω0
Andamento della reale dell’indice di rifrazione
Assorbimento
Trasparenza
ω0
ω
Andamento della parte imm. dell’indice di rifrazione
È necessario commentare sommariamente questi due grafici:
• Grafico n1 (ω ) : l’andamento del grafico è asintotico (dall’alto) al valore
unitario per valori bassi di pulsazioni, mentre i prossimità della pulsazione
di risonanza l’indice di rifrazione aumenta fino a raggiungere un massimo,
per poi decadere rapidamente e raggiungere il valore unitario in
corrispondenza di ω 0 ; a questo punto il grafico passa a valori minori di 1 (il
che vuol dire che la velocità di fase diventa maggiore della velocità della
luce, in quanto v = c n , e ciò non è in contrasto con la Teoria della
Relatività), fino a toccare un minimo, per poi risalire asintoticamente verso
il valore unitario (dal basso). In pratica la funzione è centralmente
simmetrica attorno al valore (ω 0 ,1) . È necessario ricordare che le zone in
cui la (dn1 dω ) > 0 sono dette di dispersione normale, mentre le zone in
cui (dn1 dω ) < 0 sono dette di dispersione anomala.
• Grafico n 2 (ω ) : questo grafico ha il tipico andamento a campana dei grafici
di risonanza, raggiungendo il massimo in corrispondenza di ω 0 . È
importante notare che, essendo n 2 = c βω , la componente immaginaria
rappresenta una misura dell’assorbimento che il dielettrico esercita sulla
radiazione. In effetti questo assorbimento è massimo all’interno della
campana di risonanza, mentre risulta decadere quando ci si sposta a
pulsazioni molto basse o molto alte. Le zone in cui la campana si spalma
sull’asse x, in effetti corrispondono alle zone di trasparenza: una
radiazione che possiede una pulsazione che cade nell’intervallo appena
citato attraverserà il dielettrico senza essere assorbita. Quando la campana
raggiunge il massimo (ovverosia in corrispondenza della pulsazione di
risonanza) il coefficiente di assorbimento diventa massimo (lo spettro del
materiale, in corrispondenza di quella pulsazione, registrerebbe una riga di
assorbimento). Confrontando questo secondo grafico con il primo ci si
accorge che in corrispondenza delle code di n 2 (ω ) , il grafico di n1 (ω )
possiede derivata positiva, quindi è crescente.
141
Onde elettromagnetiche
Massimiliano Carfagna
In realtà questa trattazione è molto qualitativa, in quanto tutto il modello è basato
sull’ipotesi che ogni atomo sia schematizzabile come un oscillatore armonico, e
conseguenzialemnte che tutti gli atomi del materiale siano schematizzabili come oscillatori
armonici identici tra loro come pulsazione e come ampiezza.
In realtà l’oscillazione di ogni atomo, in generale, e diversa da tutti gli altri; è
necessario, poi, considerare che l’oscillazione di alcuni atomi è legata a quella di altri, e
poi è necessario ricordare che le molecole (di cui gli atomi fanno parte) non sono dei
sistemi rigidi, ma si deformano ed oscillano anch’esse (assorbimento molecolare)
alterando così il modello. Questa osservazione ci fa capire che un modello
quantitativamente valido deve tener conto di questi fattori, quindi la polarizzabilità
elettrica potrà essere scritta come somma delle singole polarizzabilità associate ad ogni
atomo. Ciò che ne verrà fuori sarà un modello a più risonanze, la cui trattazione qualitativa
sarà equivalente alla precedente ma più complessa.
IX.5. Onde elettromagnetiche nei conduttori
In apertura del paragrafo, come prima cosa, poniamoci alcune domande:
1. Cosa succede se facciamo incidere un’onda elettromagnetica su un conduttore
omogeneo ed indefinito (esempio: corrente che attraversa un cavo a sezione
cilindrica)? Ci aspettiamo che l’onda, a contatto con il conduttore si attenui (in
quanto una parte di essa viene riflessa dal conduttore), ed inoltre che il
conduttore si riscaldi (perché l’onda genera un campo elettrico nel conduttore, il
quale, a sua volta, mette in moto le cariche, le quali, a loro volta, dissipano
energia liberata per effetto Joule). L’effetto sembra simile a quando il
conduttore è percorso da corrente.
2. C’è differenza di risultato rispetto al caso in cui il conduttore sia percorso da
corrente? In effetti il risultato è analogo al comportamento di un conduttore
sottoposto a corrente alternata (ad alta frequenza).
Si dimostra sperimentalmente che quando un conduttore è percorso da corrente
alternata ad alta frequenza (o similarmente: sul conduttore viene fatta incidere un’onda
elettromagnetica), la corrente non si distribuisce in modo uniforme su tutta la sezione del
conduttore, bensì tende ad addensarsi nello strato superficiale, aumentandone la resistenza.
Perché accade questo fenomeno, denominato effetto pelle? La spiegazione è da
rintracciare nella Faraday – Neumann e può essere riassunta brevemente nei seguenti
passaggi:
il campo elettrico (trasportato dall’onda elettromagnetica) varia nel
A.
tempo; con esso varia anche il campo magnetico generato dallo stesso
campo elettrico, per cui:
r
r
E (t ) ⇒ B(t )
B.
la variazione temporale implica la formazione di un campo elettrico
r
indotto (campo di Lorentz) Ei il quale, per via della terza equazione di
Maxwell si oppone alla variazione temporale del campo elettrico
trasportato dall’o.e.;
Il modulo del campo elettrico indotto cresce al diminuire della distanza
C.
dal centro e ciò è facilmente verificabile calcolando la circuitazione del
142
Onde elettromagnetiche
Massimiliano Carfagna
campo elettrico indotto lungo una linea chiusa rettangolare alta h e
lunga dr , infatti essa è:
r r
Ei ⋅ dl ≅ Ei (r + dr )h − Ei (r )h
∫
l
D.
in cui abbiamo messo il “circa uguale” in quanto il rettangolo, in effetti
non è un rettangolo vero e proprio, bensì un rettangolo spalmato sulla
superficie laterale del cilindro, ma dato che stiamo facendo ragionamenti
del tutto teorici e qualitativi, ci interessano solo gli ordini di grandezza;
Per via della Faraday – Neumann la circuitazione appena calcolata è
uguale all’inverso della variazione temporale di flusso del campo
magnetico, ovverosia:
r
r r
dφ B
Ei ⋅ dl = −
dt
()
∫
l
ma la derivata a secondo membro è positiva, in quanto abbiamo assunto
inizialemente che stiamo osservando il fenomeno in una fase in cui il
campo elettrico, e quindi la corrente, stanno crescendo, dunque stà
crescendo anche il campo magnetico, e dato che la superficie sulla quale
si stà calcolando il flusso, al variare del tempo, non cambia, è chiaro che
il flusso aumenta proporzionalmente al campo magnetico, riassumendo
in formule:
S = cost
r r
φ (B ) = B ⋅ dS ; B(t + dt ) > B(t ) ⇒ φ (t + dt ) > φ (t )
∫
S
⇓
E.
dφ (B )
>0
dt
A questo punto è fatta: se la derivata è maggiore di zero allora vuol dire
che, per la Faraday – Neumann, la circuitazione è minore di zero e
quindi si ha che:
r r
E i ⋅ dl ≅ E i (r + dr )h − E i (r )h < 0 ⇒ E i (r + dr ) < E i (r )
∫
l
⇓
E i (r ) > E i (r + dr )
questo dimostra che il campo indotto aumenta all’avvicinarsi all’asse del
cilindro.
Dato che il campo indotto è opposto in segno al campo inducente è
F.
ovvio che mano a mano che il campo inducente penetra verso l’interno
del cilindro tende ad essere compensato dal campo indotto, fino ad
arrivare ad un punto in cui i due campi si annullano, cosicché non c’è più
moto di cariche.
Si potrebbe pensare che il punto in cui i due campi si annullano sia molto distante
143
Onde elettromagnetiche
Massimiliano Carfagna
dalla superficie esterna del conduttore. Dimostreremo in seguito che, invece, il campo
inducente si annulla dopo aver percorso, nel conduttore, uno strato piccolissimo, detto, per
l’appunto pelle. Questo è il motivo per cui questo fenomeno viene chiamato effetto pelle.
Osservazione fondamentale: abbiamo appena detto che nei casi in cui si fornisce
una corrente variabile nel tempo ad un conduttore (sia essa proveniente da un’onda
elettromagnetica incidente o da un generatore di tensione variabile), la corrente si dispone
a scorrere in superficie (e non uniformemente su tutta la sezione del conduttore), facendo
aumentare la resistenza del conduttore stesso; ciò implica che fare dei cavi di elevato
spessore non aiuta il fluire della corrente, in quanto provocherebbe solo un aumento
eccessivo della resistenza del conduttore, impedendo, di fatto, il passaggio di corrente
(sarebbe più utile fare dei cavi, con una superficie esterna grande,così da agevolare il
passaggio di corrente, ma vuoti all’interno?)
Per rendere pratiche le considerazioni appena fatte, portiamo l’esempio di un
conduttore ohmico omogeneo ed isotropo, molto esteso, di conducibilità σ , immerso in un
r
campo E(t ) uniforme e variabile nel tempo sinusoidalmente. Le tre ipotesi si traducono
matematicamente dicendo che:
r
r
E (t ) = E 0 e iωt ⇒ campo sinusoidale
r
r
263.
J = σE
⇒ legge di Ohm locale
r
r
D = εE
⇒
mezzo isotropo
Supponiamo che il conduttore sia posto in modo tale da occupare lo spazio
sottostante al piano xy , ossia si sviluppi per le z negative (nel suo spessore), mentre la
sua superficie sia complanare al piano xy . Nell’ipotesi esemplificativa che il campo si
propaghi parallelamente all’asse y , le componenti x e z del campo e della densità di
corrente sono nulle, mentre sono nulle le derivate rispetto x e y . Ciò dipende dal fatto che
la componente E y dipende unicamente da z (il campo elettrico in un’o.e. è sempre
ortogonale alla direzione di propagazione) e da t , quindi è chiaro che le derivate rispetto a
variabili che nulle, siano nulle; in formule:
r
⎧ E ≡ (0 E y 0 ), con E y = E 0, y ( z )e iωt
⎪ r
r
264.
⎨ ∂E ∂E
=
=0
⎪
⎩ ∂x ∂y
Come prima cosa possiamo notare che un conduttore per cui valgano le condizioni
appena enunciate possiede anche la caratteristica di non avere una densità volumetrica di
carica ρ (non ha cariche localizzate al suo interno), infatti la terza equazione di Maxwell
scritta nel nostro caso, ci informa che:
r
r
r r r ∂D
r r
r
r r
r
r
∂E
∇× H = J +
⇒ ∇ × H = σE + ε
⇒ ∇ × H = σE + iεωE0 e iωt
∂t
∂t
265.
⇓
r r
r
∇ × H = (σ + iεω )E
Quindi applichiamo il rotore ad ambo i membri della precedente equazione:
144
Onde elettromagnetiche
Massimiliano Carfagna
(
)
( )
(
)
r r r
r r
r ⎛ σ + iεω ⎞ r r
1 r
∇ ⋅ ∇ × H = (σ + iεω )∇ ⋅ E = (σ + iεω ) ⋅ ∇ ⋅ εE = ⎜
⎟⋅ ∇⋅D
ε
⎝ ε
⎠
266.
⇓
r r
0 = ∇⋅D ⇒ ρ = 0
r r
Tutto ciò è dovuto al fatto che la divergenza del rotore è nulla e che ∇ ⋅ D = ρ (Prima
eq.ne di Maxwell).
Affinché il nostro conduttore sia un “buon conduttore” gli manca un’ipotesi molto
importante: facendo il rapporto tra la corrente di conduzione e la corrente di spostamento,
si vede che:
r
r
Js
∂D ∂t
iωεE ωε
=
r =
r =
267.
σE
σ
J
J
(
)
(
)
Da ciò si deduce che, se ωε << σ allora la corrente di spostamento diventa del tutto
trascurabile, in quanto il rapporto tende a zero. Questo comporta una notevole modifica
nella quarta equazione di Maxwell, in quanto, ponendoci nelle condizioni sopra indicate,
r
possiamo trascurare il termine ∂D ∂t .
In definitiva, mediante tutte queste considerazioni siamo giunti a poter scrivere le
due eq.ni di Maxwell che regolano questo fenomeno:
r r
r
r
⎧∇ × B = µJ = µσE
⎪
r
268.
⎨r r
∂B
⎪∇ × E = −
∂t
⎩
Ed il nostro scopo è quello di giungere ad un’unica equazione, la quale regoli il moto
ondulatorio del campo elettrico. Per farlo applichiamo il rotore ad ambo i membri e
r r r r r r
r
ricordiamo che ∇ × ∇ × E = ∇ ⋅ ∇ ⋅ E − ∇ 2 E :
r
r 1 r r r
r r ⎛ ∂B ⎞
r r r
r ⎛r J ⎞
∇ × ∇ × E = ∇ ⋅ ⎜⎜ ∇ ⋅ ⎟⎟ − ∇ 2 E = ∇ ⋅ ∇ ⋅ J − ∇ 2 E = ∇ × ⎜ −
⎟
269.
σ
⎝ ∂t ⎠
⎝ σ⎠
Dobbiamo inoltre ricordare che la densità di corrente è un vettore solenidale, quindi ha
divergenza nulla, per cui la relazione precedente si riduce ad una forma più semplice,
anche invertendo l’ordine di derivazione:
r
r r ⎛ ∂B ⎞
r ∂ r r
2
∇× B
∇ E = ∇ × ⎜⎜ ⎟⎟ = ∇ 2 E =
270.
∂
t
t
∂
⎝ ⎠
r r
r
Ed, utilizzando la ∇ × B = µσE si ha che:
r
r
∂
E
271.
∇ 2 E = µσ
∂t
Dato che nel caso di nostro interesse il vettore campo elettrico è del tipo 0, E y ,0 ,
si ha che la precedente equ.ne differenziale si tramuta nella:
∂E y
∂2Ey
∂E y
272.
∇ 2 E y = µσ
⇒
= µσ
2
∂t
∂t
∂z
(
(
)
(
)
)
(
)
[
]
(
145
)
Onde elettromagnetiche
Massimiliano Carfagna
Non ci rimane che calcolare la quantità ∂E y ∂z e risolvere l’ODE, ossia:
∂E y
∂t
=
[
]
∂
E 0, y ( z )e iωt = iωE 0, y ( z )e iωt
∂t
273.
Ricordando, inoltre, che:
∂2Ey
∂ 2 E 0, y
∂2
iωt
iωt
= 2 E 0, y ( z )e = e
∂z 2
∂z
∂z 2
Non ci resta che sostituire i diversi risultati nell’eq.diff. bordata ed otterremo che:
[
]
274.
∂ 2 E 0, y
275.
= iωµσE 0, y ( z )
∂z 2
La quale è nella sola variabile z . È da osservare che siamo giunti proprio a ciò che
volevamo, ovverosia l’andamento del campo elettrico sottoforma di onda in funzione della
direzione di penetrazione dell’onda stessa. La sua soluzione di questa equazione
differenziale sarà del tipo E 0 , y ( z ) = Ae α1 z + Be α 2 z in cui A e B sono costanti da
determinare in base alle condizioni iniziali, mentre α1, 2 sono le soluzioni dell’equazione
caratteristica seguente:
ωµσ
276.
α 2 − iωµσ = 0 ⇒ α 1, 2 = ± iωµσ = ± (1 + i )
= ± (1 + i )β
2
Quindi la soluzione si scrive nel seguente modo E 0 , y ( z ) = Ae β (1+ i )z = Ae βz e iβz trascurando
il termine con esponente negativo Be − β (1+i )z in quanto, per il ragionamento fatto in
precedenza, è una situazione fisicamente impossibile (infatti accettando anche questa come
parte della soluzione, otterremmo che per z → −∞ il campo elettrico diverrebbe infinito,
ma abbiamo sopra dimostrato che il campo elettrico variabile nel tempo impresso ad un
conduttore, man mano che si penetra nel conduttore stesso, diminuisce).
La soluzione appena scritta rappresenta come varia l’ampiezza del campo in
funzione dello spazio, per cui la variazione del campo in funzione dello spazio e del
tempo, invece, è data dall’equazione E y (z , t ) = E 0 , y e iωt , quindi scriveremo che:
E y (z , t ) = Ae βz e i ( βz +ωt )
βz
277.
Nella relazione precedente la quantità Λ = Ae rappresenta l’ampiezza dell’onda
che penetra nel materiale, questo vuol dire che il campo elettrico si attenua
esponenzialmente mano a mano che scendo nel materiale (ricordiamo che, per la nostra
scelta del sistema di riferimento, le z < 0 rappresentano l’interno del materiale).
Quindi, si verifica facilmente che se impongo z = − 1 β (ossia sono sceso di un
fattore 1 β nel conduttore), cosa accade alla mia ampiezza? Ma ovviamente essa si sarà
attenuata di un fattore 1 e , infatti si ha che: Λ = Ae β ⋅ (− 1 β ) = Ae − 1 = A e .
Dunque a questo particolare valore di profondità possiamo associare un nome ed un
simbolo, e lo chiameremo spessore della pelle δ , rappresenterà la distanza (dalla
superficie del conduttore) presso la quale l’onda elettromagnetica si è attenuata di un
fattore A e ; avrà il seguente valore:
146
Onde elettromagnetiche
Massimiliano Carfagna
δ=
1
β
=
2
278.
ωεσ
Come si può notare lo spessore della pelle è inversamente proporzionale alla
pulsazione dell’onda, quindi anche alla frequenza, per cui se la frequenza è molto alta è del
tutto inutile utilizzare conduttori con uno spessore della pelle molto elevato (si pensi ai
microcircuiti come i processori, i quali lavorano a frequenze nell’ordine dei MHz: i
filamenti che li costituiscono hanno un diametro nell’ordine del millimetro), mentre
quando si opera con onde a bassa frequenza, come quella della rete elettrica (50 Hz) lo
spessore della pelle aumenta, quindi è necessario avere cavi che abbiano una sezione più
che millimetrica. Infatti in δ i valori di conducibilità e di costante dielettrica del rame, con
una frequenza di 50 Hz si ha che lo spessore della pelle è di circa 9 mm.
IX.6. Spettro delle onde elettromagnetiche.
Per descrivere sommariamente le caratteristiche che le onde elettromagnetiche
assumono a diverse frequenze (o a diverse lunghezze d’onda, dato che λ = c ν ), si è
pensato che fosse utile raccogliere le informazioni di massima nella seguente tabella.
Radio
ν (Hz)
λ (m)
Sorgente di
emissione
Utilizzo
< 1⋅ 109
> 1⋅ 103
Dispositivi elettronici, come i
circuiti oscillanti
Telecomunicazioni, come
TV radio.
1⋅ 109
3 ⋅ 10 −1
Dispositivi elettronici associati
a dispositivi meccanici
1⋅ 1011
1 ⋅ 10 −3
Ricerca (studio di strutture
atomiche e molecolari)
Telecomunicazioni (radar)
Microonde
Infrarosso (IR)
4 ⋅ 10
14
8 ⋅ 10
−7
Visibile
8 ⋅ 10
14
Ultravioletto
(UV)
4 ⋅ 10
−7
3 ⋅ 1017
6 ⋅ 10 −10
5 ⋅ 1019
5 ⋅ 10 −12
> 5 ⋅ 1019
< 5 ⋅ 10 −12
Raggi X
Raggi
γ
Corpi caldi (la radiazione di
corpo nero è una radiazione
infrarossa)
Atomi e molecole quando gli
elettroni compiono transizioni
da stati metastabili a stati
stabili, oppure nei casi di
agitazione
termica
(a
temperature elevate).
Atomi e molecole quando
passano
da
uno
stato
elettronico ad un altro
Atomi e molecole, soprattutto
nei processi in cui gli elettroni
subiscono
una
brusca
accelerazione (ad esempio la
radiazione di frenamento)
Decadimenti radioattivi, ma
anche molti altri processi
nucleari
-
-
Il più evidente esempio di
utilizzo è l’abbronzatura.
Diagnostica
medica:
radiografie e radioscopia
Astrofisica:
studio
di
sorgenti di X-ray.
-
IX.7. Vettore di Poynting
Come per qualsiasi altra entità fisica, anche per il campo elettromagnetico vale il
principio di conservazione dell’energia: la somma di tutte le forme di energia possedute
147
Onde elettromagnetiche
Massimiliano Carfagna
dal campo elettromagnetico e dai sistemi con i quali essi ha interagito deve risultare
costante.
Gli aspetti energetici dei campi elettromagnetici vengono trattati, in
elettromagnetismo, introducendo una nuova quantità vettoriale, detta vettore di Poynting
r
I . Questa nuova quantità consiste in un campo vettoriale al quale è associata l’energia
trasportata dall’onda e la velocità di propagazione stessa.
Vediamo come si ricava l’espressione esplicita del vettore di Poynting.
Supponiamo di avere:
• Una superficie S chiusa e costante nel tempo, di volume τ ;
• Un campo elettromagnetico non nullo all’interno della superficie;
• Una quantità di materia contenuta nella superficie;
L’energia posseduta dal campo elettromagnetico presente all’interno di S è data dalla
somma dell’energia del campo elettrico e dell’energia del campo magnetico, calcolate,
entrambe, all’interno del volume τ :
1 r r
1 r r
U=
E ⋅ D dτ +
H ⋅ B dτ
279.
2
2
∫
(
∫
)
τ
(
)
τ
Possiamo derivare questa relazione rispetto al tempo, ottenendo che:
r
r
r
r
1 ⎡ ∂E r ∂D r ∂H r ∂B r ⎤
∂U
H ⎥ dτ
B+
E+
D+
=
⎢
280.
2 ⎣ ∂t
∂t ⎦
∂t
∂t
∂t
τ
r
r
r
r
Ricordiamo che D = εE , e B = µH . Da ciò si ha che, sostituendo nella relazione
precedente e manipolando un po’, otterremo:
r
r
r
r
∂U
1 ⎡ ∂E r ∂ εE r ∂H r ∂ µH r ⎤
=
εE +
µH +
E+
H ⎥ dτ =
⎢
∂t
∂t
∂t
∂t
2 ⎣ ∂t
⎦
τ
r
r
r
r
1 ⎡ ∂ εE r ∂ εE r ∂ µH r ∂ µH r ⎤
=
E +
E+
H +
H ⎥ dτ =
⎢
281.
∂t
∂t
∂t
2 ⎣ ∂t
⎦
τ
r
r
⎡ ∂D r ∂B r ⎤
∂U
= ⎢
E+
H ⎥ dτ
∂t
∂t ⎦
⎣ ∂t
∫
∫
∫
∫
( ) ( )
( ) ( )
( )( ) ( )
( )( ) ( )
τ
Ricordando la terza e la quarta equazione di Maxwell, è possibile operare i seguente
passaggi:
r
r
r r
r r r ∂D
∂B
282.
∇× E = −
; ∇× H = J +
∂t
∂t
Quindi la relazione precedente diventa:
r
r
r r r r r r r
⎡ ∂D r ∂B r ⎤
∂U
= ⎢
E+
H ⎥ dτ =
∇ × H − J E − ∇ × E H dτ =
∂t
∂t ⎦
⎣ ∂t
τ
τ
283.
r r r r r r r r
=
∇ × H E − ∇ × E H − J ⋅ E dτ
∫
∫ [(
∫ [(
) (
)
τ
148
) (
]
) ]
Onde elettromagnetiche
Massimiliano Carfagna
A questo punto possiamo ricordarci di una proprietà del calcolo vettoriale, secondo la
r r r r r r
r r r
quale ∇ × H E − ∇ × E H = −∇ ⋅ E × H , quindi sostituendo e dividendo i due integrali si
ha che:
r r r
r r
∂U
= − ∇ ⋅ E × H dτ − J ⋅ E dτ
284.
∂t
(
) (
)
(
)
∫
(
)
τ
∫(
)
τ
Applicando il teorema della divergenza al primo addendo del secondo membro e
moltiplicando ambo i membri per meno uno, otteniamo che:
r r
r r r
∂U
= E × H dS + J ⋅ E dτ
−
∂t
285.
S
τ 424
1
4243 1
3
∫(
∫(
)
(1)
)
( 2)
A questo punto possiamo fare qualche considerazione:
• Questa relazione rappresenta una diminuzione di energia al variare del tempo, per
via del segno meno che le si presenta davanti;
•
La quantità (2) rappresenta l’energia per unità di tempo (ovvero una potenza) che la
componente elettrica del campo elettromagnetico trasferisce alla materia (ovvero
alle cariche localizzate presenti su di essa) che abbiamo supposto essere presente
nel volume τ . Il motivo di questa associazione stà nel fatto che se pensaimo che
nel volume suddetto ci siano dN = nd τ cariche sulle quali agisce l’azione
combinata del campo elettromagnetico scritta sotto forma di forza elementare:
r
r r
r
r
r r
dF = dNq E + v d × B = nq E + v d × B dτ , allora la potenza associata a queste
cariche localizzate è data dal prodotto della forza per la velocità con cui le cariche
r r
r
r
si muovono (la velocità media di drift), quindi: dP = nqv d ⋅ E + v d × B dτ =
r r
r r
= nqv d ⋅ E dτ = J ⋅ E dτ , nella quale si è considerato che il prodotto scalare
r
r
r r
r
r
nq v d ⋅ v d × B è nullo in quanto v d × B ⊥ v d . In definitiva è chiaro che l’integrale
(2) corrisponde esattamente alla potenza del campo elettrico delle cariche
localizzate, integrato sul volume.
(
(
•
(
)
)
)
(
(
)
)
(
(
)
)
La quantità (1), invece, è il flusso del vettore di Poynting, il quale è definito come:
r r
r r r E×B
I = E×H =
286.
µ
Questo campo vettoriale, espresso in questo modo, non ci dice molto sul suo
significato fisico. Se, invece, consideriamo l’intero intergale (1) si capisce che esso
rappresenta il flusso del vettore di Poynting attraverso la superficie S . Vedremo tra
un attimo che nel caso di onde piane o di onde sferiche esso assume il significato di
“trasportatore di energia della radiazione”. Nel S.I. il vettore di Poynting, che di
fatto rappresenta una potenza per unità di superficie, si misura in [W ] m 2 oppure
in [J ] m 2 ⋅ [s ] .
[ ]
[ ]
149
Onde elettromagnetiche
Massimiliano Carfagna
A questo punto vediamo come può essere espresso il vettore di Poynting nel caso
(non tanto particolare) di onda piana. Per un’onda piana, abbiamo visto che valgono le
seguenti relazioni:
r r r
1
B2
E = B×v ;
= εE 2 ; v =
287.
µ
εµ
La seconda delle quali ci dice che, in un’onda elettromagnetica, la densità di energia per
unità di volume del campo elettrico u e è uguale alla densità di energia per unità di volume
del campo magnetico u m . Il vettore di Poynting, dunque, può essere scritto come:
r
r
r B × vr × B 1
r B 2v
I =
=
Bv ⋅ kˆ × B =
⋅ iˆ
288.
µ
µ
µ
Applicando la seconda delle relazioni prima scritte si ottiene che:
r B 2v
ε2 ˆ
ε ˆ
1 ˆ
2
2
2
ˆ
ˆ
I =
⋅ i = εE v ⋅ i = εE
⋅i = E
⋅i = E2
⋅i
289.
(
)
(
µ
)
εµ
εµ
µ
Nella quale iˆ è il versore della direzione di propagazione dell’onda. Si può notare che la
quantità ε µ corrisponde all’impedenza caratteristica Z definita in passato.
Possiamo generalizzare il discorso tenendo presente che in un’onda
elettromagnetica generica l’energia fornita dal campo elettrico è uguale all’energia fornita
dal campo magnetico (entrambe intese come energia per unità di volume), possiamo dire
che l’energia totale posseduta da un’onda elettromagnetica è data dalla:
⎞
1
1 ⎛ B2
+ εE 2 ⎟⎟
u = (u e + u m ) = ⎜⎜
290.
2
2⎝ µ
⎠
e quindi il vettore di Poynting può essere scritto come:
r 1 ⎛ B2
⎞r 1 r
I = ⎜⎜
+ εE 2 ⎟⎟v = uv
291.
2⎝ µ
2
⎠
Scritto in questo modo, risulta evidente che il vettore di Poynting rappresenta l’energia del
campo elettromagnetico contenuta in un cilindro di sezione unitaria S disposta
r
perpendicolarmente alla direzione di propagazione dell’onda, e lungo v .
In generale il modulo del vettore di Poynting prende il nome di intensità istantanea
dell’onda, in quanto essa rappresenta l’energia che all’istante t fluisce nell’unità di tempo
attraverso la superficie unitaria disposta ortogonalmente alla direzione di propagazione.
Dato che il campo elettrico, così come il campo magnetico, di un’o.e. assumono
forma di funzioni sinusoidali o cosinusoidali, è opportuno scrivere la forma che assume
l’intensità ristantanea in questa
situazione; assegnato un campo elettrico del tipo:
r
r r
r
r
E = E0 cos k ⋅ r − ωt in cui k è il vettore d’onda e r = ( x, y , z ) è il vettore di
propagazione, l’intensità istantanea dell’onda, sarà:
r r
E2
r
292.
I (r , t ) = 0 cos 2 k ⋅ r − ωt
Z
(
)
(
150
)
Onde elettromagnetiche
Massimiliano Carfagna
La quale rappresenta un’onda che si propaga nella stessa direzione e con la stessa velocità
dell’onda elettromagnetica associata.
IX.8. Quantità di moto e pressione di radiazione
In generale la quantità di moto associata ad una forza, rappresenta la forza per unità
di tempo, ovvero l’impulso della forza.
In relazione al campo magnetico, abbiamo già accennato, nel precedente paragrafo
a come può essere scritta la forza per unità di volume esercitata da una radiazione
elettromagnetica su un volumetto infinitesimo
di materiale; per essa si è scritto che:
r
r dF
r r
r
293.
f =
= nq E + v d × B
dτ
Nella quale n è il numero di cariche presenti nell’unità di volume.
Per il calcolo della quantità di moto è necessario riferirsi alla media su un periodo
della forza, ovverosia:
T
r
r 1 dF
q=
dt
294.
T dτ
0
r r
r rr
Ma dato che il campo elettrico è della forma: E (r , t ) = E 0 e i (kr −ωt ) allora la sua media su un
periodo sarà nulla, cosicché la relazione precedente risulterà comprendere solo il termine
r
r
magnetico moltiplicato vettorialmente per la densità di corrente J = nq v d :
r
r r
r
r
q = nqv d × B = J × B
295.
(
)
∫
Nella quale è stato inserito il simbolo
per indicare che sia la densità di corrente di
conduzione, sia il vettore induzione magnetica devono essere calcolati facendo la loro
media su un periodo.
Possiamo notare che la densità di corrente di conduzione è parallela al campo
elettrico, dunque è ortogonale al campo magnetico, per cui il prodotto vettoriale tra le due
fornisce un vettore che si dirige nella direzione di propagazione dell’onda:
r r
J × B = JB ⋅ vˆ , e, ricordando che E = vB possiamo scrivere che JB ⋅ vˆ = JE ⋅ vˆ v , o
in maniera più elegante:
r r
E⋅J
r
296.
q=
⋅ vˆ
v
Il termine al numeratore, però, può subire ancora qualche modificazione in quanto il
r r
prodotto scalare E ⋅ J non è altro che la potenza per unità di volume dell’onda. Ciò lo si
r
ricava facilmente se si moltiplica scalarmente per vd l’espressione prima citata:
r
r r
r
r r
r r r r
dF r
p = f ⋅ vd =
⋅ v d = nqv d ⋅ E + v d ⋅ v d × B = J ⋅ E
297.
1
42
4
3 14243
dτ
r r
(
J ⋅E
)
0
Risulta quindi evidente che la quantità di moto potrà essere scritta nel seguente modo:
151
Onde elettromagnetiche
Massimiliano Carfagna
p
r
298.
qv =
⋅ vˆ
v
r
Riassumendo: la quantità di moto qv di un’onda elettromagnetica trasferita, in un
periodo, all’unità di volume del materiale su quale l’onda incide, è pari al rapporto tra la
potenza per unità di volume, mediata su un periodo, diviso il modulo della velocità di
propagazione, e il vettore che ne risulta si dirige parallelamente alla direzione di
propagazione dell’onda. Abbiamo ritenuto opportuno aggiungere il pedice “ v ” per
specificare che la quantità appena calcolata si riferisce all’impulso per unità di volume.
In effetti, però, se l’onda trasferisce al materiale tutta la sua energia, ovvero ci si
trova in condizioni di assorbimento totale, è più conveniente riferirsi all’energia per unità
di tempo incidente sull’unità di superficie del materiale (e non sull’unità di volume!).
Questo comporta una sostanziale modifica nella relazione appena scritta, in quanto, al
posto della p è necessario introdurre, per l’appunto, l’intensità I dell’onda
elettromagnetica, la quale corrisponde esattamente all’energia trasmessa dall’onda,
nell’unità di tempo, all’unità di superficie normale alla direzione d incidenza dell’onda
stessa.
Ricordiamo che l’intensità corrisponde esattamente al modulo del vettore di
Poynting, definito nel paragrafo precedente, quindi, inserendolo nella relazione precedente
al posto della potenza si ha che:
r
r r
×B
I
E
I
r
299.
⋅ vˆ =
=
qs =
v
v
µv
Alla quantità appena calcolata si dà il nome di quantità di moto (impulso) per unità di
r
tempo e per unità di superficie q s . È importante notare che I è l’intensità media, e non
l’intensità istantanea (data, instante per istante, dal modulo del vettore di Poynting), quindi
essa corrisponde al valore:
E eff2
E2 ε
= 0
I =
300.
Z
2 µ
r
A questo punto osserviamo il modulo del vettore q s : in effetti, trascurando la media
temporale dell’intensità (ossia considerando l’intensità istantanea) e facendo l’analisi
r
dimensionale della q s ci si accorge che essa ha le dimensioni di una forza per unità di
superficie, infatti:
[W ] [s] = [N ] [m] ⋅ 1 ⋅ [s] = [N ] = [atm]
I
⇒ 2 ⋅
301.
[s] m 2 [m] m 2
v
m [m]
Ciò dimostra che il modulo della quantità di moto istantanea per unità di superficie
rappresenta la pressione esercitata dall’onda incidente su una superficie ad essa normale
e perfettamente assorbente, ovverosia la cosiddetta pressione di radiazione.
Come sempre accade quando si definisce un vettore quantità di moto, esso viene
r
spesso associato ad un vettore momento angolare L calcolato rispetto ad un polo O . Una
radiazione elettromagnetica possiede almeno due tipi di momenti angolari:
r
• Momento angolare orbitale: detto q s la quantità di moto per unità di
[ ]
[ ]
152
[ ]
Onde elettromagnetiche
•
Massimiliano Carfagna
r
r
superficie, e detto r il vettore che unisce il raggio di quantità di moto q s
con il polo O scelto per il calcolo del momento, si ha che il momento
r r r
angolare orbitale è dato dal prodotto vettoriale L = r × q s .
Momento angolare intrinseco: è l’analgo del momento di spin associato ad
una particella, ovverosia rappresenta la rotazione della radiazione attorno ad
un asse. Esso ha due valori:
r
1. L = ±ωI se la radiazione è polarizzata circolarmente (ossia il campo
elettrico ruota intorno alla direzione di propagazione)
r
2. L = 0 se la radiazione è polarizzata linearmente ( ossia il campo
elettrico vibra in un piano fisso, ad esempio nel piano xy se x è la
direzione di propagazione).
IX.9. Tensore degli sforzi di Maxwell
Nel paragrafo precedente si è introdotta la quantità di moto di un’onda
elettromagnetica a partire da considerazioni teoriche, mescolate a relazioni empiriche.
Qui di seguito vogliamo giungere agli stessi risultati ma utilizzando un approccio
del tutto teorico, in modo da sviluppare delle relazioni valide senza limitazioni di sorta.
Dato un volume τ di forma costante nel tempo, in cui S sia la superficie che lo
contiene, in precedenza abbiamo scritto
r che:
r dF
r r
r
302.
f =
= nq E + v d × B
dτ
r
r
Se consideriamo che nq = ρ è la densità di carica e che nqvd = J è la densità di corrente,
si ha che il risultante delle forze elettromagnetiche presenti nel volume τ è dato dal
seguente integrale di volume:
r
r r r
F = ρE + J × B dτ
303.
(
)
∫(
)
τ
Partendo da questa relazione possiamo attuare una serie di passaggi matematici che
ci permetteranno di giungere ad una espressione esplicita del risultante delle forze. Come
prima cosa notiamo che, dalle equazioni di Maxwell si ricava che:
r
r
r r r ∂D
r r r ∂D
∇× H = J +
⇒ J = ∇× H −
304.
∂t
∂t
r r
∇⋅D = ρ
Quindi sostituendo nella relazione precedente si ha che:
r
r
⎛ r r r r r r ∂D r ⎞
× B ⎟⎟dτ
F = ⎜⎜ ∇ ⋅ D E + ∇ × H × B −
305.
∂t
⎝
⎠
(
∫(
) (
)
)
τ
Ovviamente il terzo termine a secondo membro può essere scritto in modo equivalente
ricordando che:
r
r
r
r
∂ r r ∂D r ∂B r
∂D r ∂ r r ∂B r
306.
D× B =
D× B −
×B+
×D⇒
×B =
×D
∂t
∂t
∂t
∂t
∂t
∂t
[
]
[
153
]
Onde elettromagnetiche
Massimiliano Carfagna
Ne consegue che, sostituendo il tutto nell’integrale precedente otterremo:
r
r
⎛ r r r r r r ∂ r r ∂B r ⎞
× D ⎟⎟ dτ
F = ⎜⎜ ∇ ⋅ D E + ∇ × H × B −
D×B +
∂
t
∂
t
⎝
⎠
∫(
) (
[
)
]
307.
τ
A questo punto spezziamo i singoli membri e riscriviamo nel modo seguente la precedente
relazione:
r
r ∂
r r
r r r
r r r
∂B r
F+
D × B dτ = ∇ ⋅ D Edτ +
× Ddτ − B × ∇ × H dτ
308.
∂t
∂t
∫[
]
∫(
τ
∫
)
τ
∫
τ
(
)
τ
È importante notare che l’ultimo termine ha cambiato segno in quanto vale la seguente
r r r
r r r
relazione vettoriale: ∇ × H × B = − B × ∇ × H . Possiamo operare altre due importanti
modifiche: come prima cosa, mediante la terza equazione di Maxwell possiamo scrivere
r
r r
che ∂B ∂t = − ∇ × E :
r ∂
r r
r r r
r r r
r r r
F+
D × B dτ = ∇ ⋅ D Edτ − D × ∇ × E dτ − B × ∇ × H dτ
309.
∂t
(
∫[
(
)
]
∫(
)
τ
(
)
∫
)
τ
(
)
τ
∫
(
)
τ
Poi è possibile aggiungere un termine nullo che ha lo scopo di rendere simmetrica la
relazione: infatti se aggiungo un integrale di volume la cui funzione integrando sia
r r r
r
H ∇ ⋅ B , non modifico la relazione in quanto B è solenoidale e quindi la sua divergenza è
nulla:
r ∂
r r
r r r r r r
r r r r r r
F+
D × B dτ =
∇ ⋅ D E − D × ∇ × E + H ∇ ⋅ B − B × ∇ × H dτ
310.
∂t
(
)
∫[
]
τ
∫ [(
)
(
)
(
)
(
)]
τ
A questo punto, mediante calcoli laboriosi ma comunque banali, utilizzando il
teorema della divergenza e le proprietà dell’operatore nabla, è possibile trasformare
l’integrale a secondo membro in un integrale di superficie. Successivamente è possibile
scrivere il risultante delle forze per componenti, nel modo seguente:
⎧
⎪ Fx + ∂G x = Txx dS x + Txy dS y + Txz dS z
⎪
∂t
S
⎪
⎪⎪
∂G y
= T yx dS x + T yy dS y + T yz dS z
311.
⎨ Fy +
∂
t
⎪
S
⎪
∂G z
⎪
⎪ Fz + ∂t = Tzx dS x + Tzy dS y + Tzz dS z
⎪⎩
S
∫[
∫[
∫[
]
]
]
Nelle tre relazioni scalari appena scritte il significato delle singole quantità è il seguente:
•
r
G =
∫ (D × B)dτ
r
r
è la quantità di moto totale del sistema (isolato) racchiuso nel
τ
volume τ . Dimostreremo tra un attimo questa affermazione.
154
Onde elettromagnetiche
•
•
Massimiliano Carfagna
r
dS = (dS x , dS y , dS z ) è l’elemento della superficie S che racchiude il volume τ
considerato.
Tij con i, j = x, y, z sono i coefficienti di una matrice 3 × 3 la quale prende il
nome di tensore degli sforzi di Maxwell. Ogni singolo elemento Tij dS j rappresenta
la componente, lungo l’asse i , della quantità di moto per unità di tempo trasmessa
all’unità di superficie dS j .
Dai calcoli omessi si evince che una scrittura esplicita del tensore degli sforzi è la
seguente:
⎧1 i = j
δ ij = ⎨
1
⎛
2
2
2 2 ⎞
Tij = ε 0 ⎜ Ei E j + v Bi B j − δ ij (E + v B )⎟ con
312.
⎩0 i ≠ j
2
⎝
⎠
i, j = [x, y, z ]
Dalla quale si nota che Tij è un tensore simmetrico e che esso dipende esplicitamente dal
campo elettrico e dal campo magnetico trasportato dall’onda elettromagnetica.
r
Giustifichiamo la precedente affermazione secondo la quale G sia la quantità di
moto totale del sistema.
Per la seconda equazione cardinale della meccanica,
si ha che:
r
r dQ
313.
F=
dt
Quindi le tre componenti precedentemente scritte possono anche essere viste nella forma
seguente:
⎧
⎪ ∂ [Q + G ] = T dS + T dS + T dS
x
xx
x
xy
y
xz
z
⎪ ∂t x
S
⎪
⎪⎪ ∂
314.
⎨ Q y + G y = T yx dS x + T yy dS y + T yz dS z
⎪ ∂t
S
⎪
⎪∂
⎪ ∂t [Q z + G z ] = Tzx dS x + Tzy dS y + Tzz dS z
⎪⎩
S
[
]
∫[
∫[
∫[
]
]
]
Appare chiaro che, se il campo elettromagnetico è confinato unicamente nel
volume τ , quindi è l’unico artefice della forza agente nel volume considerato, allora il
sistema può ritenersi isolato. Questo implica che è sempre possibile trovare una superficie
r
r
S sulla quale E e B siano nulli. La conseguenza di ciò è che i secondi membri delle
r r
precedenti relazioni saranno nulli, e quindi la quantità Q + G si conserva, in formule:
r r
∂ r r
Q + G = 0 ⇒ Q + G = cost
315.
∂t
Dato che in un sistema isolato la quantità di moto totale del sistema si conserva, e
r
r
dato che Q rappresenta la quantità di moto meccanica del sistema, appare chiaro che G
può essere interpretata come la quantità di moto del campo elettromagnetico.
[
]
155
Onde elettromagnetiche
Massimiliano Carfagna
Si può notare che la sua scrittura locale corrisponde alla densità di quantità di moto
per unità di volume, ovverosia:r
r I
r r
r dG r r
316.
g=
= D × B = εµ E × H = εµS = 2 vˆ
dτ
v
La quale è in accordo con la relazione
r r
r
I
E×B
q s = ⋅ vˆ =
317.
v
µv
Che rappresenta la quantità di moto che incide su una superficie unitaria, nell’unità di
r
tempo. Infatti g è una densità di quantità di moto per unità di volume, e il volume sulla
quale deve essere calcolata è quello di un cilindro di base unitaria e altezza v , ciò vuol dire
che:
r
r qs 1 I
I
g=
= ⋅ ⋅ vˆ = 2 ⋅ vˆ
318.
v
v v
v
(
IX.10.
)
Potenziali elettrodinamici
In passato si è detto che le quattro equazioni di Maxwell rappresentano due
equazioni scalari e sei equazioni vettoriali tra di loro dipendenti. Infatti bastano la terza e la
quarta, in forma di componenti, per determinare univocamente il campo e.m..In definitiva,
quindi, sono necessarie sei equazioni scalari per la determinazione del campo elettrico e di
quello magnetico.
Per semplificare questo problema si è pensato di introdurre delle relazioni che
contengano delle funzioni (vettoriale e scalare, rispettivamente) che abbiamo chiamato
r
r
r
potenziale vettore A e potenziale scalare V , legate a B ed a E dalle relazioni seguenti:
r
r r r
r
⎛ r ∂A ⎞
⎟
∇ × A = B ; ∇V = −⎜⎜ E +
319.
∂t ⎟⎠
⎝
I quali prendono il nome di potenziali elettrodinamici. La seconda delle precedenti
r r
relazioni è stata ricavata notando che, se si introduce la ∇ × A nella terza equazione di
Maxwell si giunge a dire che:
r
r
r
r r
r ∂A
r ⎛ r ∂A ⎞
∂ r r
∂B
⎟=0
⇒ ∇ × ⎜⎜ E +
= − ∇ × A = −∇ ×
∇× E = −
320.
⎟
∂
∂t
∂t
∂t
t
⎝
⎠
Ciò vuol dire che la quantità tra parentesi è un vettore irrotazionale, e quindi può essere
r
scritto come gradiente ∇V di una funzione scalare che chiameremo potenziale scalare V .
Il nostro scopo è quello di trovare una alternativa più semplice alla soluzione delle
r
r
equazioni di Maxwell per giungere alla conoscenza di E e B . A volte, però, noti i campi
elettrico e magnetico,
risulta necessario conoscere l’espressione dei potenziali
elettrodinamici, e questo lo si può fare scrivendo la prima e la quarta equazione di
r
Maxwell in funzione di A e di V , ottenendo così le cosiddette equazioni della dinamica
dei potenziali o equazioni elettrodinamiche. Per la prima eq.ne di Maxwell si ottiene che:
(
)
156
Onde elettromagnetiche
Massimiliano Carfagna
(
)
r r
ρ
∂ r r
ρ
∇ ⋅ E = − ⇒ ∇ 2V + ∇ ⋅ A = −
321.
ε
ε
∂t
Per la quarta, invece, dovremo eseguire i seguenti calcoli:
r
r r
r
∂E
∇ × B = µJ + εµ
∂t
⇓
r
r
r r r r
r
r ∂V ⎞
r r r
r
∂ ⎛r
∂A ⎞
∂2 A
⎛
2
⎟ ⇒ −∇ A + ∇ ∇ ⋅ A = µJ − εµ ⎜ ∇ ⋅
∇ × ∇ × A = µJ − εµ ⎜⎜ ∇V +
⎟ + εµ 2 322.
∂t ⎝
∂t ⎟⎠
∂t ⎠
∂t
⎝
r
r
r
∂2 A r ⎛ r r
∂V ⎞
∇ 2 A − εµ 2 − ∇⎜ ∇ ⋅ A + εµ
⎟ = − µJ
∂t ⎠
∂t
⎝
(
)
(
)
In definitiva le equazioni elettrodinamiche sono le seguenti:
∂ r r
ρ
⎧ 2
∇⋅ A = −
∇
V
+
⎪
∂t
ε
⎪
r
323.
⎨ r
2
r r r
r
⎪∇ 2 A − εµ ∂ A − ∇⎛⎜ ∇ ⋅ A + εµ ∂V ⎞⎟ = − µJ
⎪⎩
∂t ⎠
∂t 2
⎝
Le presenti equazioni, una volta assegnate le condizioni iniziali, hanno, al di là
delle complicazioni matematiche, un’unica soluzione. In effetti esse semplificano il nostro
problema, in quanto invece di dover risolvere sei equazioni scalari, con le equazioni
elettrodinamiche ci troviamo a dover risolvere un sistema di quattro equazioni differenziali
del secondo ordine.
C’è, però, ancora un margine di miglioramento: infatti possiamo sfruttare il
margine di arbitrarietà che le definizioni dei potenziali elettrodinamici comportano per
rendere disaccoppiate le precedenti equazioni. Con questo intendiamo che sarebbe molto
utile avere le diverse incognite racchiuse singolarmente in una sola equazione, ovverosia,
che ognuna delle quattro equazioni scalari precedentemente citata dipendesse da un’unica
incognita e non contemporaneamente da tutte e quattro le incognite, così come accade per
le eq.ni elettrodinamiche accoppiate.
Tutto questo può essere fatto considerando che i potenziali elettrodinamici
summenzionati, per via della loro stessa definizione, risultano essere soluzioni delle
r
equazioni elettrodinamiche accoppiate a meno di una funzione ϕ = ϕ (r , t ) delle coordinate
e del tempo detta funzione di gauge (si legge gheig e significa ricalibratura), in quanto dati
r
altri due potenziali elettrodinamici, indicati con A' e V ' definiti dalle:
r r r
⎧ A' = A + ∇ϕ
⎪
324.
⎨
∂ϕ
'
V
=
V
+
⎪
∂t
⎩
La quale è detta trasformazione di gauge, è facile dimostrare (ma noi non lo faremo) che i
nuovi potenziali così definiti rappresentino ancora una soluzione per le equazioni
elettrodinamiche accoppiate.
A cosa serve la trasformazione di gauge? Molto semplice: mediante la
(
)
157
Onde elettromagnetiche
Massimiliano Carfagna
trasformazione di gauge è possibile risalire ad una funzione di gauge tale che le equazioni
elettrodinamiche risultino disaccoppiate.
Osservando con attenzione le equazioni elettrodinamiche è possibile accorgersi che,
se il termine
r r
∂V
∇ ⋅ A + εµ
=0
325.
∂t
Allora risulterebbe che la seconda delle eq.ni citate sarebbe dipendente solamente dal
potenziale vettore, mentre la prima, nella quale si è andato a sostituire − εµ (∂V ∂t ) al
r r
posto di ∇ ⋅ A (per via della condizione appena citata, detta condizione di Lorentz)
risulterebbe dipendente solamente dal potenziale scalare, si avrebbero quindi le seguenti
equazioni elettrodinamiche disaccoppiate:
⎧ 2
∂ 2V
ρ
∇
−
=−
εµ
V
⎪⎪
2
ε
∂t
r
326.
⎨
2
⎪∇ 2 Ar − εµ ∂ A = − µJr
⎪⎩
∂t 2
La trasformazione di gauge sopra introdotta è necessaria per dimostrare che esiste una
funzione di gauge tale che soddisfi la condizione di Lorentz, la quale è condizione
r
necessaria e sufficiente affinché A e V siano soluzioni tanto delle equazioni
elettrodinamiche accoppiate quanto delle equazioni elettrodinamiche disaccoppiate.In
conclusione la funzione di Gauge non deve essere calcolata, bensì è semplicemente
necessario verificare che l’equazione seguente:
r r
r r r
∂V '
∂⎛
∂ϕ ⎞
∇ ⋅ A'+εµ
= 0 ⇒ ∇ ⋅ A + ∇ ⋅ ϕ + εµ ⎜V −
⎟=0
∂t
∂t ⎝
∂t ⎠
⇓
327.
2
∂ ϕ
∂V ⎞
⎛r r
∇ 2ϕ − εµ 2 = −⎜ ∇ ⋅ A + εµ
⎟
∂t ⎠
∂t
⎝
Sia risolubile; se ciò avviene allora le soluzioni delle equazioni elettrodinamiche
disaccoppiate sono date dalle seguenti espressioni:
r r
⎧r r
µ J (r ' , t − ∆r v )
dτ '
⎪ A(r , t ) =
4π
∆r
⎪⎪
τ
328.
⎨
r
ρ (r ' , t − ∆r v )
⎪V (rr, t ) = 1
dτ '
⎪
∆r
4πε
⎪⎩
τ
Nelle quali le seguenti quantità sono:
• τ è il volume nel quale sono localizzate le sorgenti;
r
• r ' è la distanza delle sorgenti dall’origine del riferimento;
r
r r
• ∆r = r − r ' in cui r è la distanza dall’origine del riferimento del punto in cui si
stanno calcolando i potenziali;
• v = 1 εµ è la velocità di propagazione del segnale elettromagnetico.
(
∫
∫
158
)
Onde elettromagnetiche
Massimiliano Carfagna
r
È importante notare che le due funzioni J e ρ non sono calcolate nell’istante t
nel quale si stanno calcolando i potenziali, bensì prima, ovverosia all’istante t ' = t − ∆r v
che rappresenta l’istante in cui il segnale elettromagnetico parte dalla sorgente. Infatti si
può notare che la quantità ∆r v corrisponde proprio al tempo necessario al segnale per
r
r
raggiungere il punto distante r dall’origine, partendo dalla sorgente distante r '
dall’origine. In pratica i potenziali elettrodinamici vengono calcolati in ritardo rispetto
all’istante in cui vengono calcolate le funzioni integrande di tali potenziali: questo è il
motivo per il quale i potenziali elettrodinamici prendono anche il nome di potenziali
ritardati.
Questi potenziali, per via del modo con il quale sono stati costruiti, soddisfano la
condizione di Lorentz precedentemente introdotta; si dice allora che i potenziali
elettrodinamici appena introdotti appartengono alla gauge di Lorentz.
Alla condizione di Lorentz menzionata precedentemente si affianca la cosiddetta
condizione di Colulomb, la quale consiste nello scegliere il potenziale vettore come un
campo solenoidale, ovverosia:
r r
329.
∇⋅ A = 0
Questa condizione venne rilevata già in passato quando definimmo il potenziale vettore, e
il motivo per la quale questa condizione tornava utile era che, nel caso stazionario era
possibile scrivere che:
r r
r
r r r
r
r r r
r
r
330.
∇ × B = µJ ⇒ ∇ × ∇ × A = µJ ⇒ ∇ ∇ ⋅ A − ∇ 2 A = µJ ⇒ ∇ 2 A = − µJ
Dunque, volendo generalizzare al caso non stazionario il risultato ottenuto in
passato, e possibile applicare la gauge di Coulomb alle equazioni elettrodinamiche
accoppiate, in modo da semplificarle nel seguente modo:
(
(
)
(
)
)
ρ
∂ r r
⎧ 2
ρ
⎧ 2
V
A
∇
⋅
=
−
∇
+
r r
V
∇
=
−
⎪
∇⋅ A = 0 ⎪
ε
∂t
ε
⎪
⎪
r
r
⇒⎨
⎨ r
2
2
r
r
r
r
331.
r
r ∂V
V
A
∂
∂
⎞
⎛
A
∂
⎪∇ 2 A − εµ
⎪∇ 2 A − εµ
J
εµ
µ
A
=
−
−
∇
∇
⋅
+
εµ
−
⎟
=
∇
⎜
⎪⎩
⎪⎩
∂t ⎠
∂t 2
∂t
∂t 2
⎝
Le quali risultano lo stesso accoppiate (infatti, a differenza della gauge di lorentz, la gauge
di Coulomb non ha lo scopo di rendere disaccoppiate le due equazioni!), ma il potenziale
scalare soluzione del sistema è della forma:
r
r
ρ (r , t )
1
V (r , t ) =
r r dτ '
332.
4πε r − r '
la cui relazione è identica al caso stazionario, con l’unica differenza che la distribuzione di
carica è anche funzione del tempo. Questa relazione prende il nome di potenziale di
Coulomb istantaneo. Il termine “istantaneo” è un po’ infelice, in quanto un potenziale non
può propagarsi istantaneamente. Ciò comunque non interessa ai fini fisici, in quanto ciò
che è effettivamente ha importanza fisica è il potenziale vettore, in quanto esso è il
r
portatore dei campi. In conclusione, dato che A non si propaga istantaneamente allora non
lo faranno neanche i campi.
∫
159
Onde elettromagnetiche
Massimiliano Carfagna
Uno dei casi più palesi dell’utilità della gauge di Coulomb è rappresentato
dall’utilizzo di questa condizione in assenza di sorgenti, ovverosia quando ρ = 0 e J = 0 ,
infatti, in questo caso la seconda equazione elettrodinamica
si scriverà come:
r
2
r
∂ A
333.
∇ 2 A − εµ
= 0
∂t 2
Perché il primo termine a secondo membro dipende dalla densità di carica (V = V (ρ )) , e
quindi se ρ = 0 , allora lo sarà anche V (ρ ) , mentre il secondo termine è nullo per ipotesi.
La precedente relazione è formalmente identica all’equazione delle onde, per cui, una volta
trovata la soluzione non resta che applicare le relazioni che legano il potenziale vettore ai
r r
campi E e B , per cui
r
r r r
r
∂A
334.
E=−
; B = ∇× A
∂t
N.B. nella prima delle due relazioni appena scritte si è applicata l’ipotesi che V = 0 , e
r
quindi che ∇V = 0 .
IX.11.
Effetto Doppler
Quando una sorgente di onde è in movimento rispetto ad un osservatore o,
viceversa, è l’osservatore a muoversi rispetto ad una sorgente ferma, si registra una
differenza di frequenza dell’onda, tra la frequenza effettivamente emessa e la frequenza
percepita dall’osservatore; questo effetto passa sotto il nome di effetto Doppler.
Analizziamo in dettaglio i singoli casi.
• Sorgente ferma, osservatore in movimento. Supponiamo che l’osservatore
P si muova con velocità v P rispetto ad una sorgente S immobile.
Supponiamo, inoltre che la sorgente emetta onde a frequenza ν 0 . Se P
procede verso S comincerà ad incontrare i fronti d’onda anticipatamente,
ovverosia riceve un numero di fornti d’onda per unità di tempo maggiore
rispetto a quelli che arriverebbero ad un osservatore fermo; se P procede in
verso opposto a quello di S allora si ha la situazione inversa, i fornti d’onda
raggiungono P in ritardo. Nel primo caso citato la frequenza dell’onda
aumenta, mentre nel secondo diminuisce.
• Sorgente in movimento, osservatore fermo. Se S procede in direzione di P
i fronti d’onda si addensano maggiormente nel verso di marcia, quindi
arriverà in P un numero maggiore di fronti d’onda per unità di tempo
rispetto al caso in cui S fosse ferma. Se S procede in direzione opposta,
allora i fronti d’onda si dilatano e P ne riceverà di meno per unità di tempo.
Anche qui, come per il caso precedente, quando S si avvicina la frequenza
percepita ν sarà maggiore, mentre quando S si allontana ν sarà minore di
ν0 .
Passiamo ad un’analisi quantitativa del fenomeno. Supponiamo di avere un sistema
di riferimento inerziale Σ ed un sistema di riferimento mobile Σ' nella cui origine sia
posta la sorgente S di onde elettromagnetiche. Supponiamo, inoltre, che il moto della
160
Onde elettromagnetiche
Massimiliano Carfagna
sorgente sia rettilineo ed uniforme lungo la direzione x e che la velocità della sorgente sia
v s . Un osservatore in quiete nel sistema Σ' misura, per l’onda in questione, le seguenti
quantità di riferimento: λ0 e ν 0 le quali sono indicate con i nomi di lunghezza d’onda
propria e frequenza propria. Il nostro scopo è quello di conoscere le quantità λ e ν
percepite da un osservatore che si trova nel sistema inerziale Σ . Le due onde avranno, nei
rispettivi sistemi di riferimento, la seguente forma:
⎛ ⎛x
⎞⎞
Σ : ⇒ cos⎜⎜ 2π ⎜ − νt ⎟ ⎟⎟
⎠⎠
⎝ ⎝λ
335.
⎛ ⎛ x'
⎞⎞
Σ': ⇒ cos⎜⎜ 2π ⎜⎜ − ν 0 t ' ⎟⎟ ⎟⎟
⎠⎠
⎝ ⎝ λ0
La trasformazione di coordinate che lega i due sistemi di riferimento è la trasformazione di
Lorentz, ovverosia:
(x − v s t )
⎧
'
=
= γ (x − v s t )
x
⎪
2
2
1
−
v
c
s
⎪⎪
336.
⎨
2
2
−
t
v
c
x
2
⎪t ' =
s
= γ t − v s2 c x
⎪
2
2
1 − vs c
⎪⎩
( (
)) ( (
))
Sostituendo queste espressioni nell’equazione dell’onda nel sistema Σ' , ciò che si ottiene è
che:
⎛
⎛
⎞⎞
⎛ x v
⎞⎞
⎛ x − vs t
v2
2
cos⎜⎜ 2πγ ⎜⎜
− ν 0 t − v s2 c x ⎟⎟ ⎟⎟ = cos⎜ 2πγ ⎜⎜ − s t − ν 0 t + s2 xν 0 ⎟⎟ ⎟ =
⎜
⎟
c
⎠⎠
⎝ λ0
⎠⎠
⎝ λ0 λ0
⎝
⎝
337.
⎛
⎛⎛ 1 v2 ⎞ ⎛ v
⎞ ⎞⎞
= cos⎜ 2πγ ⎜ ⎜⎜ + s2 ν 0 ⎟⎟ x − ⎜⎜ s + ν 0 ⎟⎟t ⎟ ⎟
⎜ λ
⎟
⎜
⎠ ⎠ ⎟⎠
⎠ ⎝ λ0
⎝⎝ 0 c
⎝
( (
))
Confrontando l’argomento della relazione precedente con l’argomento dell’onda in Σ si ha
un sistema di due equazioni in due incognite, il cui risultato è il seguente:
⎧
⎧1
⎛ 1 v s2 ⎞
1 − v s2 c 2
⎪λ = λ0
⎪ = γ ⎜⎜ + 2 ν 0 ⎟⎟
1 + vs c
⎪
⎪λ
⎠
⎝ λ0 c
⇒L⇒ ⎨
338.
⎨
1 + vs c
⎛ vs
⎞
⎪
⎪
ν =ν 0
⎜
⎟
⎪
⎪ν = γ ⎜ λ + ν 0 ⎟
1 − v s2 c 2
⎝ 0
⎠
⎩
⎩
Dalle quali si deduce che in condizioni non relativistiche, ovverosia quando la sorgente si
muova a velocità molto inferiori a 299792458 m/s, si ha che i termini quadratici possono
essere trascurati e quindi le relazioni precedenti si riducono alla forma approssimata:
λ0
⎧
2
⎛ vs ⎞
⎪λ ≅ 1 ± v c
v s << c ⇒ ⎜ ⎟ << 1 ≅ 0 ⇒ ⎨
339.
s
⎝c⎠
⎪ν ≅ ν (1 ± v c )
0
s
⎩
Nelle quali l’indeterminaizone di segno, omessa in tutta la trattazione per semplicità di
161
(
)
(
)
Onde elettromagnetiche
Massimiliano Carfagna
notazione, rappresenta il fatto che osservatore e sorgente si avvicinino (+) o si allontanino
(-) l’uno dall’altra.
IX.12.
Condizioni di raccordo
Già in precedenza si è parlato più volte delle condizioni di raccordo da applicare ai
campi elettrici ed ai campi magnetici quando essi attraversano una interfaccia di
separazione. La questione, però, non è mai stata affrontata in termini del tutto generali,
quindi, ha questo punto, è arrivato il momento di partire dalle eq.ni di Maxwell scritte nella
forma più generale, e da esse, con il metodo già utilizzato in precedenza, ricavare le
cosiddette condizioni di raccordo tra i campi.
Ricordiamo brevementerle rquattro eq.ni di Maxwell:
r r
;
∇ ⋅ D =rρ
∇⋅B = 0 r
r r ∂B
r r r ∂D
340.
∇× E +
= 0 ; ∇× H = J +
∂t
∂t
Dove si è ritenuto opportuno far notare che la seconda e la terza sono quelle omogenee,
ossia quelle che, anche nella loro forma più generale, non presentano i termini noti dovuti
r
alle sorgenti ( ρ e J ).
Supponiamo di avere una superficie Σ che separa due mezzi (1 e 2) e su di essa
costruiamo un cilindro elementare di area di base dS e altezza dh (infinitesimo di ordine
superiore rispetto alle dimensioni lineari di dS ). Denominiamo, inoltre, dS 1 la base posta
nel mezzo 1, dΣ la proiezione della base sull’interfaccia di separazione e dS 2 la base posta
nel mezzo 2.
Scriviamo la prima di Maxwell in forma integrale, integrando sul volume τ del
cilindretto sopra definito, si ha che:
r r
r
r
r
∇ ⋅ Ddτ = ρdτ ⇒ DdS ⋅ nˆ = ρ dτ ⇒ D ⋅ nˆ1 − D ⋅ nˆ 2 dΣ = ρdΣdh
341.
∫
∫
τ
τ
∫
∫
(
)
τ
S
In cui si è indicato con n̂1, 2 le normali alle superfici dS1, 2 . In definitiva, trascurando dh
(in quanto è un infinitesimo di ordine superiore rispetto alle dimensioni lineari di dΣ ) e
scrivendo in forma più compatta i prodotti scalari si ha che:
D1n − D2 n = ρ
342.
Questa relazione è del tutto generale, in quanto:
• Se i due mezzi sono dielettrici scarichi si ha che ρ = 0 ⇒ D1n = D2 n ;
• Se uno dei due mezzi è conduttore e l’altro è un dielettrico scarico si ritrova il
Teorema di Coulomb D1n = 0 , D2 n = σ .
Dalla seconda di Maxwell si ricava, invece, la condizione di raccordo generale per
le componenti normali del campo magnetico, infatti possiamo procedere allo stesso modo
del caso precedente, utilizzando la stessa superficie:
r r
r
r
r
∇ ⋅ Bdτ = 0 ⇒ BdS ⋅ nˆ = 0 ⇒ B ⋅ nˆ1 − B ⋅ nˆ 2 dΣ = 0
343.
∫
τ
∫
(
S
162
)
Onde elettromagnetiche
Massimiliano Carfagna
Ed in maniera acnor più semplice del caso precedente si è ottenuto che:
B1n − B2 n = 0
344.
A questo punto, considerando la solita interfaccia di separazione, possiamo
considerare una linea chiusa formata da un rettangolo che ha i lati maggiori lunghi dl e i
lati minori lunghi dn , in cui dn è un infinitesimo di ordine superiore rispetto a dl .
Supponiamo di percorrere il rettangolo l in verso antiorario ed indichiamo con tˆ1 e tˆ2 i
versori che indicano il verso di percorrenza sui lati dl 1 e dl 2 .
Per ricavare la seconda condizione di raccordo del campo elettrico, applichiamo il
teorema del rotore alla terza equazione dir Maxwell:
r
r r r
r r
∂B r
∂B r
∇ × E dS = −
⋅ dS ⇒ E ⋅ d l = −
⋅ dS
345.
∂t
∂t
S
S
l
S
r
ˆ
In cui, questa volta dS = dS ⋅ k è un vettore normale alla superficie dS , in cui dS è
l’elemento di superficie di cui l ne è il contorno. Possiamo far tendere a zero i lati dn del
contorno, cosicché tutta la superficie tenderà a zero e quindi l’integrale a secondo membro
della precedente tenderà a zero anch’esso e la circuitazione sarà:
r
r
346.
− E ⋅ tˆ1 + E ⋅ tˆ1 = 0
E quindi, in forma più compatta, sarebbe:
E1n − E 2 n = 0
347.
I ultima analisi, a partire dalla quarta equazione di Maxwell possiamo ripetere lo
stesso procedimento effettuato ora, per ricavare le condizioni di raccordo per le
componenti tangenti del campo magnetico:
r
r
r r r
r r
r r
⎛ r ∂D ⎞ r
∂D r
⎟ dS ⇒ H ⋅ d l = J d S +
dS
∇ × H dS = ⎜⎜ J +
348.
⎟
∂t
∂
t
⎝
⎠
∫(
∫(
S
∫
)
)
∫
∫
∫
S
l
∫
∫
S
∫
S
Il primo integrale a secondo membro rappresenta la corrente concatenata con l , ma essa è
nulla in quanto non abbiamo supposto nessuno spostamento di cariche in quella regione, ne
deriva che
r
r
r
∂
D
349.
2 − H ⋅ tˆ1 + H ⋅ tˆ2 dl = 2
dl
∂t
Nella quale, come abbiamo visto in precedenza, possiamo far tendere a zero i due lati
ortogonali all’interfaccia, cosicché ciò che rimane dei due integrali sia al primo, sia al
secondo membro è solo il doppio della lunghezza dei due lati maggiori, per cui, in
definitiva, scriveremo che:
r
∂D
350.
H 1t − H 2t =
∂t
Nella quale il termine a secondo membro rappresenta la densità di corrente superficiale,
nell’ipotesi che uno dei due mezzi sia un conduttore, e quindi risulta nullo (in accordo con
quanto detto precedentemente) se i due mezzi sono dei dielettrici.
(
)
163