I.1 Grandezze cinematiche e dinamiche
I.1.1 Flusso, deformazione, forze
Il moto di un fluido, e più in generale la deformazione di un materiale, sono azioni
che richiedono l’applicazione di forze (o di coppie). Scopo della reologia è proprio quello
di individuare e studiare il legame, determinato dalla microstruttura del materiale, tra le
forze applicate e il moto (o la deformazione) che esse determinano.
Uno dei concetti fondamentali della reologia è quello di deformazione. Al contrario
dei corpi rigidi, che costituiscono una idealizzazione del comportamento reale, il materiale
polimerico, sottoposto all’azione di forze esterne, viene deformato. Il tipo di deformazione
e la sua entità dipendono (oltre che dalle forze applicate) dalla geometria, dalle dimensioni
e dai confini dello spazio occupato dal materiale.
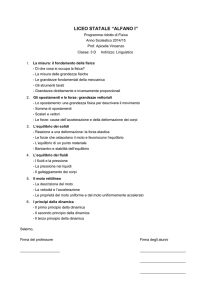
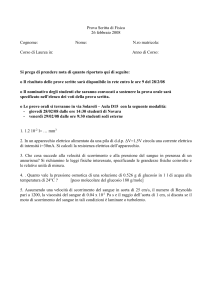
Si consideri il semplice esempio di Figura 1: uno strato di polimero fuso (ad
esempio un film di polietilene) è applicato ad una parete verticale. Sul polimero agisce
sicuramente la forza dovuta al peso stesso del materiale, che lo spinge a muoversi verso il
basso. Allo stesso tempo il fluido si trova confinato in una ben precisa geometria. A
sinistra, la presenza della parete fissa impedisce il movimento dello strato di polimero ad
essa immediatamente attaccato (condizione di aderenza). Alla destra, invece, il fluido non
è confinato, ed è quindi libero di muoversi verso il basso. Il risultato è che il moto avviene
per scorrimento di strati successivi, via via più veloci a mano a mano che ci si sposta dalla
parete al pelo libero del fluido. La conseguenza di questa variazione, o gradiente, di
velocità in direzione perpendicolare al flusso è che un volumetto di fluido (A) inizialmente
a forma di parallelepipedo viene progressivamente deformato (B, C). La deformazione
continua del volumetto genera il flusso di polimero che scorre lungo la parete. Una
deformazione come quella di Figura 1viene detta appunto di scorrimento (o di shear). Il
gradiente di velocità in questo caso prende il nome di gradiente di scorrimento o shear
rate.
A
B
C
Figura 1: Il moto di un film cadente
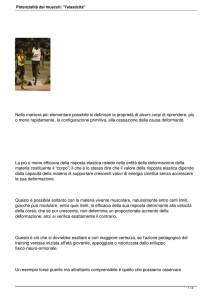
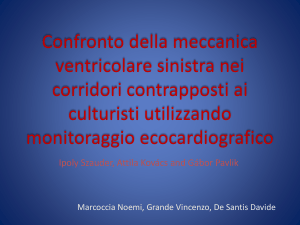
La Figura 2 presenta un altro tipo di deformazione, quella cosiddetta estensionale,
che ad esempio si incontra nel processo di filatura quando un filamento di polimero fuso
viene estruso da un foro e successivamente tirato in modo da produrre una fibra sottile. Sul
liquido agisce questa volta la forza dovuta al suo stesso peso, oltre alla forza aggiuntiva
legata al processo di stiro. In questo caso, tuttavia, non vi sono pareti a determinare lo
scorrimento relativo di strati di liquido. L’elementino di fluido (A) questa volta si deforma
allungandosi progressivamente lungo la direzione del flusso e restringendosi lungo quella
perpendicolare (B e C), in modo da conservare il volume. In questo caso la deformazione
continua determina un flusso elongazionale, e il gradiente di velocità, che in questo caso
1
prende il nome di gradiente di allungamento o stretching rate, si sviluppa lungo la
direzione del flusso.
A
B
C
Figura 2: Flusso estensionale
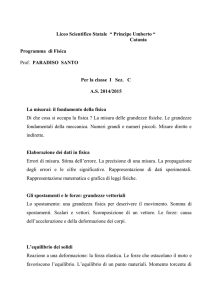
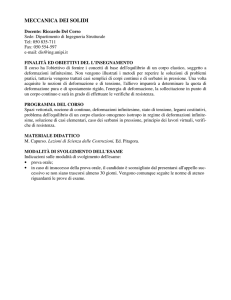
Una situazione più complessa è presentata in Figura 3, nella quale è schematizzata
la sezione di un condotto che presenta una brusca contrazione. In questo caso, che si
incontra ad esempio in corrispondenza del gate attraversato dal polimero fuso nel processo
di stampaggio a iniezione, e nel quale la forza che determina il moto del fluido è quella
dovuta alla pressione di iniezione, si genera un moto complesso. Infatti, a causa della
condizione di aderenza, strati di fluido più vicini alle pareti del tubo si muovono più
lentamente, determinando così velocità più alte al centro e più basse alla parete
(componente di scorrimento). Allo stesso tempo la diminuzione di sezione provoca un
graduale aumento di velocità e quindi un flusso di tipo estensionale. In questo caso un
volumetto di fluido viene contemporaneamente deformato e allungato, sotto l’azione
simultanea delle due componenti di flusso.
A
B
C
Figura 3: Flusso attraverso una brusca contrazione
Si può dimostrare che in situazioni di flusso complesse come quella di Figura 3, e
come capita quasi sempre in tutte le situazioni di interesse pratico, la deformazione
istantanea si può sempre ottenere dalla sovrapposizione di una componente di scorrimento
e di una componente estensionale.
Gli esempi su indicati mostrano che per studiare il moto e la deformazione di un
fluido, è necessario esaminare due aspetti del problema: da un lato la cinematica del moto,
cioè le relazioni che legano la posizione e la velocità del fluido in funzione del tempo;
dall’altro la dinamica del moto, cioè lo studio delle forze che agiscono sul fluido. Questi
due aspetti saranno trattati, separatamente, nei due paragrafi successivi.
2
I.1.2 Cinematica reologica
La reologia studia il comportamento dei materiali durante il flusso o la
deformazione. Molto spesso i materiali polimerici esibiscono proprietà reologiche
complesse. Essi risultano quindi difficili da studiare nelle condizioni di flusso complicate
che si determinano nelle reali applicazioni (vedi l’esempio di Figura 3). Proprio per questo
motivo il reologo cerca di ricreare in laboratorio situazioni di flusso cinematicamente
semplici, che possano quindi essere determinate con precisione e che siano facilmente
controllabili. Per quanto detto nel precedente paragrafo, ci si riduce sempre a due
condizioni di flusso fondamentali, quelle di scorrimento e quelle elongazionali.
Il moto è di scorrimento quando sia possibile individuare delle superfici di
materiale che si muovono scorrendo le une rispetto alle altre. Queste superfici, dette
appunto di scorrimento, possono essere viste a tutti gli effetti come delle superfici rigide,
nel senso che due punti di una stessa superficie si mantengono a distanza costante. Punti
appartenenti a superfici diverse si allontanano o si avvicinano proprio a causa dello
scorrimento relativo delle superfici.
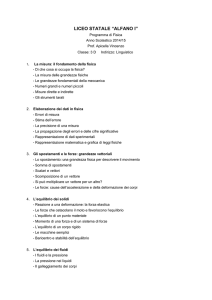
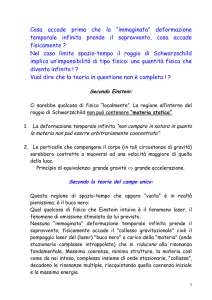
L’esempio più semplice di flusso di scorrimento è illustrato in Figura 4. In essa un
fluido è confinato tra due piatti paralleli, uno fermo, l’altro in movimento, posti ad una
distanza h. In questo caso le superfici di scorrimento sono lamine di materiale parallele ai
due piatti. Ovviamente lo scorrimento è ottenuto perché, man mano che si passa dal piatto
inferiore fermo a quello superiore in movimento, aumenta la spostamento delle superfici
che quindi scorrono le une rispetto alle altre.
Figura 4: Il flusso di scorrimento tra due piatti paralleli
Una descrizione quantitativa della cinematica dello scorrimento richiede di stabilire
quanto è stato deformato il materiale e con quale velocità è avvenuta la deformazione.
Con riferimento alla Figura 4, se il piatto superiore è stato mosso per una distanza
complessiva s, la deformazione subita dal materiale, generalmente rappresentata dal
simbolo γ è data da:
γ=
s
h
(1)
Si noti che tutti i punti del materiale sono sottoposti alla stessa deformazione.
Infatti per uno strato più vicino al piatto fermo lo spostamento è più piccolo: distanza dal
piatto fermo e spazio percorso variano in maniera proporzionale di modo che il loro
rapporto, dato dalla (1), è sempre costante.
Nella definizione di deformazione non è contenuta nessuna informazione sul tempo
necessario ad applicarla. Nel moto dei fluidi, tuttavia, la rapidità con cui avviene la
deformazione è un parametro fondamentale. Si definisce appunto velocità di
deformazione, o gradiente di scorrimento (in inglese shear rate), la variazione della
deformazione con il tempo. Se lo spostamento avviene con velocità v la velocità di
deformazione sarà data da:
3
γ =
1 ds v
=
h dt h
(2)
Per comprendere la simbologia si ricordi che il punto su una variabile indica l’operazione
di derivata rispetto al tempo. La (2) segue allora dalla (1) considerando che la derivata
dello spostamento è proprio la velocità.
Nel caso particolare in cui al flusso sia imposta una velocità di deformazione
costante per un tempo t, tempo, deformazione e velocità di deformazione sono legati tra
loro in maniera semplice:
γ = γt
(3)
Le (1) e (2) definiscono la cinematica del moto di scorrimento tra due piatti
paralleli in moto traslatorio l’uno rispetto all’altro. I flussi di scorrimento più utilizzati
sono quelli nei quali le superfici di scorrimento sono costituite da piani paralleli (Figura 5)
o da cilindri concentrici (Figura 6). Nel caso dei piani paralleli lo scorrimento può essere
ottenuto per traslazione (Figura 5a), situazione corrispondente ai piatti paralleli appena
descritti. Questo tipo di flusso si incontra in molti processi industriali, ed è per esempio
alla base del funzionamento di una delle principali apparecchiature di processo,
l’estrusore. Nel secondo caso (Figura 5b), lo scorrimento può avvenire per rotazione dei
piani, una situazione spesso sfruttata nei reometri rotazionali, che verranno descritti
successivamente.
a)
b)
Figura 5: Flusso di scorrimento di: a) piani paralleli traslanti; b) piani paralleli rotanti
Anche nel caso delle superfici cilindriche si può ottenere scorrimento sia per
traslazione che per rotazione relativa delle superfici. Il primo caso (Figura 6a) è quello
caratteristico del moto in condotti, in cui la presenza della parete del condotto “frena” gli
strati di materiale più esterni, producendo la caratteristica deformazione “a cannocchiale”.
Il secondo caso (Figura 6b) rappresenta anch’esso una situazione tipica dei reometri
rotazionali, ma si incontra anche (con alcune complessità aggiuntive) nei recipienti di
agitazione e di mescolamento.
4
a)
b)
Figura 6: Flusso di scorrimento di: a) cilindri traslanti; b) cilindri rotanti
Nella deformazione estensionale un elemento di fluido è sottoposto ad un
allungamento o ad una contrazione. In questo caso è generalmente possibile individuare
delle superfici che, anziché scorrere le une rispetto alle altre, si allontanano o si avvicinano
lungo la direzione del moto. La Figura 7 mostra il tipo più semplice di flusso estensionale:
un cilindro di materiale viene fissato ad un’estremità e tirato dall’altra: si produce quindi
un allungamento nella direzione del moto, ed una corrispondente contrazione nella
direzione trasversale. Si noti che lo stesso tipo di deformazione si può ottenere anche
premendo sulla superficie laterale del cilindro, lasciando libere le estremità di allungarsi
E’ evidente che le superfici S1 e S2, perpendicolari al flusso, si allontanano
progressivamente (Figura 7). Il flusso estensionale monoassiale appena descritto viene
incontrato in moltissime situazioni pratiche, ad esempio nel processo di filatura, mediante
il quale si producono fibre sintetiche. Una componente di deformazione estensionale si
incontra anche nei flussi in canali nei quali si abbia una brusca contrazione, come già
illustrato in precedenza.
S1
S2
S1
S2
S1
SS2 1
S2
a)
a)
a)
b)
b)
b)
Figura 7: la deformazione estensionale monoassiale
Considerazioni analoghe a quelle del moto di scorrimento si applicano nel caso dei
moti estensionali. In questo caso, tuttavia, la definizione di deformazione non è univoca.
Infatti, se L0 è la lunghezza iniziale dell’elemento di materiale, e L quella dopo la
deformazione, si definisce la deformazione di Cauchy (o ingegneristica) come:
e=
L − L0
= λ −1
L0
(4)
Nella (4) compare il rapporto di stiro (stretching ratio), λ, e cioè il rapporto tra le
lunghezze prima e dopo la deformazione. In realtà, la definizione più rigorosa di
deformazione elongazionale è la seguente:
5
⎛L⎞
⎟ = ln ( λ ) = ln (1 + e )
⎝ L0 ⎠
ε = ln ⎜
(5)
ε viene detta deformazione di Hencky (Hencky strain). Si noti subito che la deformazione
di Cauchy rappresenta il limite della deformazione di Henky nel caso di piccole
deformazioni.
La velocità di deformazione estensionale, o gradiente di allungamento, (in inglese
stretching rate) rappresenta la variazione di deformazione relativa rispetto al tempo. In
analogia con il flusso di scorrimento, se le due superfici a distanza dx si allontanano con
velocità relativa dv, si ha:
ε =
dv
dx
(6)
Siccome un estremo dell’elemento di fluido si muove con velocità vL=dL/dt mentre l’altro
estremo è fermo (v0=0), il gradiente di allungamento assume la forma:
ε =
v L − v0 1 dL 1 d ( λ ) d
dε
=
=
= ln ( λ ) =
L
L dt λ dt
dt
dt
(7)
La (7) mostra il legame tra tutte le grandezze cinematiche estensionali fin qui
introdotte e chiarisce anche il motivo per cui la (5) rappresenta la corretta espressione per
la deformazione estensionale. Come per il moto di scorrimento, in condizioni di stretching
rate costante applicata in un tempo t sussiste la seguente relazione:
ε = εt
(8)
Avendo definito alcune grandezze cinematiche, è bene subito discutere delle loro
dimensioni, e delle relative unità di misura. Si noti che le deformazioni rappresentano
sempre il rapporto tra uno spostamento ed una distanza. Trattandosi di due lunghezze, tale
rapporto è appunto adimensionale. Di conseguenza non esiste un’unità di misura della
deformazione, che è un numero puro. Le velocità di deformazione, sia di scorrimento che
estensionale, hanno invece le dimensioni dell’inverso di un tempo e sono misurate
generalmente in [s-1].
A conclusione di questo paragrafo va ribadito ancora una volta che sia la
deformazione che la velocità di deformazione rappresentano una misura della variazione
di distanza relativa tra due punti del materiale, e non uno spostamento o una velocità
assoluti. Nel moto di un corpo rigido, ad esempio, non vi sono né gradienti di scorrimento
né gradienti di allungamento. Durante il moto, il corpo mantiene inalterata la sua forma.
Sono invece proprio le deformazioni, e cioè i cambiamenti di forma, a caratterizzare il
moto dei fluidi o, più in generale, dei materiali detti appunto deformabili. Ed è proprio per
indurre una deformazione che si rende necessaria l’applicazione di forze di deformazione,
come verrà chiarito nel successivo paragrafo.
I.1.3 Dinamica reologica
La deformazione e il flusso dei materiali avvengono a causa dell’applicazione di
forze. Così come fatto nel precedente paragrafo per le grandezze cinematiche, è
6
importante definire le corrispondenti grandezze dinamiche, cioè le forze che entrano in
gioco nei processi di deformazione e flusso dei materiali.
Nel caso del flusso di scorrimento (Figura 8), il moto del piatto superiore avviene
se e solo se ad esso viene applicata una forza.
F Figura 8: Forza tangenziale per il moto di scorrimento
Va notato innanzitutto che, rispetto al fluido contenuto tra i piatti paralleli, la forza
in Figura 8 è una forza di superficie, cioè è applicata ad una delle superfici della sistema.
Ricordiamo che tutte le forze sono rappresentabili da un vettore, cioè da una freccia di cui
è necessario, oltre all’intensità, specificare la direzione e il verso. Come chiarito dalla
Figura 8, la forza F giace nello stesso piano del piatto cui è applicata, e ha stessa direzione
e verso del moto. Forze di superficie giacenti sul piano della superficie stessa vengono
dette forze tangenziali. Al contrario, forze di superficie perpendicolari alla superficie
vengono dette forze normali. Si osservi che una qualunque forza di superficie può sempre
essere decomposta in una componente tangenziale, ed in una normale.
Nella reologia (e più in generale nella meccanica dei fluidi e nella dinamica dei
corpi) esistono altri tipi di forze, le cosiddette forze di massa. Si tratta di quelle forze che
esistono per il fatto che tutti i corpi possiedono appunto una massa. La più importante tra
queste è certamente la forza peso. Nel caso particolare di Figura 8, tuttavia, la forza peso
del fluido non entra in gioco. Il moto di scorrimento è infatti orizzontale, mentre gli effetti
del peso del fluido, la cui direzione è verticale, vengono completamente annullati dalla
presenza del piatto inferiore. Si tratta tuttavia di una situazione particolare. Si ricordino gli
esempi di Figure 1 e 2, in cui è proprio il peso del fluido a generare la sua deformazione e
moto.
La forza di superficie è una grandezza estensiva, dipende cioè dalle effettive
dimensioni del sistema. La forza necessaria a mettere in movimento ad una data velocità il
piatto di Figura 8 è direttamente proporzionale alle dimensioni del piatto stesso. E’ ovvio
quindi che, per evitare di dover sempre specificare le dimensioni del sistema, convenga
riferirsi alla corrispondente grandezza specifica, e cioè ad una forza per unità di superficie.
Il modulo di tale grandezza viene detto sforzo, e si indica generalmente con il simbolo
greco σ. Così, nel nostro esempio di moto di scorrimento, se A è l’area della superficie del
piatto, lo sforzo tangenziale è definito da:
σ=
F
A
(9)
Le dimensioni dello sforzo sono quelle di una forza divisa per il quadrato di una
lunghezza. Se si utilizza il sistema di unità di misura internazionale (SI), l’unità di misura
degli sforzi è il Pascal (Pa), definito come:
1 Pa = 1
N
m2
(10)
7
Le stesse considerazioni utilizzate per il moto di scorrimento valgono anche per
quello estensionale. In questo caso ad un estremo del materiale viene applicata (Figura 9)
una forza di trazione T, questa volta normale alla superficie di applicazione. Ancora una
volta, se A è l’area di questa superficie, lo sforzo normale viene ottenuto come:
σ=
T
A
(11)
In questo caso l’allungamento del materiale avviene a causa dell’applicazione di una forza
di trazione.
Figura 9: Forza normale per il moto estensionale
Il parallelismo tra sforzi tangenziali in shear e sforzi normali in elongazione, che
risulta nella sostanziale identità tra le loro definizioni (Equazioni (9) e (11)), richiede una
certa dose di cautela. Si noti che lo sforzo tangenziale agisce su di una superficie di area
costante. Nel caso dei moti estensionali, invece, l’allungamento del materiale provoca
un’ovvia riduzione della sezione trasversale. Questo significa che, se nell’esperimento di
estensione la forza di trazione viene ad esempio mantenuta costante, lo sforzo aumenta
progressivamente. Per questo motivo, soprattutto nella meccanica dei solidi elastici, si fa
spesso riferimento al cosiddetto sforzo ingegneristico, definito come:
σI =
T
A0
(12)
dove A0 è la sezione iniziale del materiale prima della deformazione.
L’altra differenza tra le due situazioni considerate è ancor più rilevante. Per
comprenderlo, si considerino ancora una volta le condizioni elementari di deformazione di
scorrimento e di allungamento. Per ottenere la deformazione di scorrimento, o di taglio,
l’unica possibilità è quella di applicare uno sforzo tangenziale sulla superficie parallela al
moto stesso di deformazione. Al contrario, per ottenere la deformazione estensionale, in
alternativa alla forza di trazione applicata all’estremo dell’elemento di materiale, si può
agire mediante una forza di compressione normale alla superficie laterale del materiale. Si
pensi ad esempio al fatto che, per ottenere il “salsicciotto” di pasta dal quale ricavare gli
gnocchi, si preferisce agire sulle superfici laterali rotolando e comprimendo la pasta tra le
mani ed il tavolo, piuttosto che tirare il cilindretto dagli estremi. Sempre rimanendo in
cucina, è nota l’abilita dei pizzaioli nello stendere la pasta alternando una trazione dai
bordi ad una compressione della pasta sul tavolo. Tradotto in termini tecnici, quel che
conta nella deformazione estensionale non è tanto il valore dello sforzo in una direzione,
quanto la differenza tra lo sforzo nella direzione del moto e quello applicato alle superfici
laterali in direzione perpendicolare al moto stesso:
σ = σ N −σ L
(13)
8
Nella (13) σN e σL sono appunto gli sforzi normali applicati sulle superfici trasversali e
laterali, rispettivamente, mentre il segno meno si rende necessario in quanto gli sforzi di
trazione sono considerati per convenzione positivi mentre quelli di compressione sono
negativi.
La (13) può essere anche letta nel seguente modo: per ottenere una deformazione
estensionale c’è bisogno di uno sbilanciamento di sforzi normali lungo due superfici
perpendicolari del materiale. A questo riguardo va ricordato che esiste sempre una forza
normale che agisce su tutte le superfici di un qualunque sistema: si tratta infatti della forza
di pressione idrostatica. Questa può essere definita come la componente di sforzo normale
che agisce uniformemente su tutte le superfici di un corpo. Siccome la pressione
idrostatica è uguale su tutte le superfici del sistema, essa non può indurre deformazioni nel
materiale.
Prima di terminare questo paragrafo è importante aggiungere che, anche nel caso di
moto e deformazione in condizioni cinematiche di scorrimento, in molti materiali
(certamente i polimeri fusi) sono presenti componenti normali aggiuntive dello sforzo. In
termini pratici, con riferimento alla semplice cinematica di scorrimento di Figura 4, oltre
allo sforzo tangenziale che determina il movimento del piatto, è anche necessario applicare
una forza normale di compressione per evitare la separazione tra i piatti stessi. Questo
fenomeno, che come verrà precisato più avanti dipende dalla presenza di una componente
elastica nel materiale, ha ben note conseguenze: è presente ad esempio in un solido
elastico quando questo venga sottoposto ad una deformazione di taglio o di torsione; nel
caso dei polimeri fusi, la presenza di tali sforzi normali aggiuntivi è responsabile, tra gli
altri, del ben noto fenomeno del die swell nel processo di estrusione.
La necessità di applicare una forza di chiusura per mantenere i piatti in posizione
implica che all’interno del materiale si sviluppa una forza normale verso l’esterno, cioè di
trazione. Si può dimostrare che in realtà sono presenti due diverse componenti di forza
normale: una, di trazione, perpendicolare al piatto (quindi perpendicolare alla direzione del
flusso), l’altra, di compressione, perpendicolare alla direzione del flusso (vedi Figura 10).
Come nel caso del moto estensionale, quel che conta ai fini pratici è la differenza tra i
valori di tali forze. Questo porta alla definizione della cosiddetta prima differenza degli
sforzi normali:
N1 = σ n ,1 − σ n,2
(14)
Questa importante proprietà reologica dei fusi polimerici, e le sue implicazioni dal punto
di vista tecnologico, verranno discusse nel seguito.
Fn,1
Fn,2
Figura 10: Gli sforzi normali nel moto di scorrimento
9
Sommario Sezione I.1
– La reologia studia il comportamento dei fluidi in termini di flusso e deformazione sotto
l’azione di forze ad esso applicate.
– La reologia si concentra sullo studio di condizioni cinematicamente e dinamicamente
semplici: lo shear (moto o deformazione di taglio) e l’estensione. Condizioni di
deformazione più complesse sono sempre riconducibili a quelle elementari.
– Nel caso del moto di scorrimento (o di taglio, o di shear) il parametro cinematico
rilevante è la deformazione, pari al rapporto tra lo spostamento nella direzione dello
scorrimento e la dimensione trasversale del materiale. Da esso deriva l’atro parametro
rilevante, la velocità di deformazione (o shear rate) pari alla velocità di spostamento
divisa per la stessa dimensione trasversale. In termini dinamici, nel materiale
sottoposto a moto di scorrimento insorgono due tipologie di sforzo: sforzo tangenziale,
che agisce in direzione e verso del moto sulle superfici di scorrimento; prima
differenza degli sforzi normali, cioè la differenza tra lo sforzo normale perpendicolare
al piano di scorrimento e lo sforzo normale perpendicolare alla direzione del moto.
Tali sforzi normali insorgono solamente quando nel materiale è presente una
componente elastica.
– Nel caso del moto estensionale (di compressione) il parametro cinematico rilevante è
la deformazione di Hencky (Hencky strain) pari al logaritmo naturale del rapporto di
allungamento. La velocità di allungamento (o stretching rate) è pari alla deformazione
temporale dell’Hencky strain. In termini dinamici il parametro rilevante è la differenza
tra lo sforzo normale nella direzione del moto e quello nella direzione perpendicolare.
10