IV-1
FUNZIONI REALI DI PIÙ VARIABILI
1
IV-1
1
INSIEMI IN RN
Funzioni reali di più variabili
Indice
1 Insiemi in Rn
1.1 Simmetrie degli insiemi
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
4
2 Funzioni da Rn a R
2.1 Simmetrie di una funzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Insiemi di livello e curve di livello . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Restrizione di una funzione ad una curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
9
10
11
3 Limite
13
4 Continuità
14
5 Soluzioni degli esercizi
15
In questa parte del corso studieremo alcuni concetti analitici sulle funzioni di più variabili reali.1 Come le funzioni
di una variabile reale sono definite in genere in particolari sottoinsiemi di R, cosı̀ le funzioni di due variabili sono
definite in sottoinsiemi di R2 , quelle di tre variabili in sottoinsiemi di R3 , e cosı̀ via. Nella terza parte del corso
abbiamo già parlato estesamente di R2 , R3 , . . . , ma l’approccio qui è un po’ diverso, diciamo che è più analitico e
meno algebrico (per farmi capire: è più simile a quello della parte II piuttosto che a quello della parte III).
Inizio richiamando alcuni concetti generali già visti (nella parte I) sulla rappresentazione di R2 nel piano cartesiano
e su alcuni sottoinsiemi di R2 , R3 , e in generale di Rn .
1
Insiemi in Rn
L’obiettivo di questa sezione è quello, come detto, di famigliarizzare lo studente con alcuni sottoinsiemi di R2 (e in
generale di Rn ). Richiamiamo però anzitutto alcuni concetti e simbologie, già incontrati in R, che ci saranno utili nel
seguito.
Attraverso la corrispondenza biunivoca tra i punti di un asse cartesiano e i numeri reali, abbiamo visto come
associare ad ogni punto la sua ascissa e, viceversa, ad ogni numero reale il punto che può essere considerato la sua
immagine geometrica. Nella parte II di questo corso abbiamo spesso utilizzato alcuni importanti sottoinsiemi di R, gli
intervalli. Dati a, b ∈ R, con a ≤ b, sappiamo che è un intervallo di R ad esempio l’insieme
[a, b] = {x ∈ R : a ≤ x ≤ b}.
Altri esempi di intervalli sono, come noto,
(a, b) = {x ∈ R : a < x < b},
[a, b) = {x ∈ R : a ≤ x < b},
(a, b] = {x ∈ R : a < x ≤ b}.
I numeri a e b sono gli estremi dell’intervallo. Se gli estremi sono entrambi compresi nell’intervallo di cui si vuol
parlare si dice che l’intervallo è chiuso; se invece sono entrambi esclusi si parla di intervallo aperto.
Abbiamo incontrato molto spesso anche intervalli illimitati, precisamente gli insiemi del tipo
[a, +∞) =
(a, +∞) =
(−∞, b] =
(−∞, b) =
{x ∈ R : x ≥ a},
{x ∈ R : x > a},
{x ∈ R : x ≤ b},
{x ∈ R : x < b},
dove a, b ∈ R.
1 Sono gli stessi concetti visti per le funzioni di una variabile (limiti, continuità, derivabilità, integrabilità) adattati alla presenza di più
variabili. Vedremo che per alcuni di questi non è necessario aggiungere molto, essendo l’estensione del tutto immediata, per altri invece le
cose non sono altrettanto dirette.
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
1
2
INSIEMI IN RN
Dato un punto x0 ∈ R, abbiamo poi definito intorni di x0 di raggio δ gli intervalli del tipo
(x0 − δ, x0 + δ),
dove δ può essere un qualunque numero reale positivo, che viene detto il raggio dell’intorno.
Abbiamo anche definito, dati due punti x e y in R, la distanza di x e y come il numero reale non negativo
d(x, y) = |x − y|,
dopodiché abbiamo potuto scrivere
(x0 − δ, x0 + δ) = z ∈ R : d(z, x0 ) < δ = z ∈ R : |z − x0 | < δ ,
dove si esprime in una identità insiemistica il fatto che l’intorno di x0 di raggio δ è costituito dai punti che distano da
x0 meno di δ.
|
x0 − δ
b
z
x0
δ
}|
{
|
x0 + δ
In R abbiamo detto che cosa intendiamo con punto interno, punto esterno, punto isolato, punto di accumulazione
e punto di frontiera di un insieme. Infine abbiamo detto quando un insieme si dice aperto e quando si dice chiuso.2
Ora facciamo lo stesso in R2 . 3 Se ora nel piano consideriamo due assi cartesiani ortogonali con l’origine nel loro
punto comune, possiamo stabilire, cosı̀ come fatto tra i punti di una retta ed R, una corrispondenza biunivoca tra i
punti del piano e l’insieme R2 delle coppie di numeri reali.
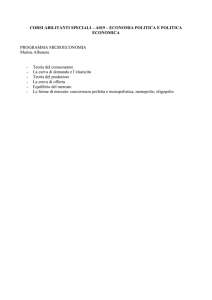
Chiamiamo intervallo di R2 un sottoinsieme di R2 che è prodotto cartesiano di due intervalli di R. Ad esempio è
un intervallo di R2 l’insieme
A = [a, b] × [c, d] = (x, y) ∈ R2 : a ≤ x ≤ b, c ≤ y ≤ d , con a, b, c, d ∈ R. 4
Esso ha come immagine geometrica un rettangolo con i lati paralleli agli assi.
y
d
A
c
x
a
b
L’intervallo è aperto se è prodotto cartesiano di due intervalli aperti ed è chiuso se è prodotto cartesiano di due
intervalli chiusi. Le altre possibilità danno origine ad intervalli che non sono né aperti né chiusi.
y
Possiamo anche qui parlare di intervalli illimitati: sono quelli che sono prodotto cartesiano di due intervalli, di cui almeno uno illimitato. È un intervallo illimitato ad
esempio l’insieme
[0, 1] × (0, +∞) = (x, y) ∈ R2 : 0 ≤ x ≤ 1; y > 0 .
1
x
2 Non sto ripetendo cose già dette poco fa: prima dicevo degli intervalli aperti o chiusi, qui dico degli insiemi in generale. Gli intervalli
sono soltanto un caso molto particolare di insiemi.
3 R2 è sempre l’insieme delle coppie ordinate di numeri reali, come nella parte III. È cioè il prodotto cartesiano R × R. Ricordo che, se
A e B sono due insiemi, si definisce prodotto cartesiano di A e B l’insieme A × B delle coppie ordinate (a, b) di elementi rispettivamente
di A e di B. Sapete già che non dovete fare confusione con la notazione (a, b), che purtroppo serve ad indicare sia una coppia di reali sia
un intervallo di R.
4 Ecco, in questa scrittura potrebbe sorgere il dubbio se (x, y) voglia indicare un intervallo di estremi x e y (cioè un sottoinsieme di R)
oppure la coppia di numeri reali x e y (cioè un elemento di R2 ). La scrittura (x, y), isolata dal contesto, è come detto ambigua. Ma nel
contesto in cui viene usata non lo è più. Qui trovo scritto esplicitamente (x, y) ∈ R2 , e quindi non ci possono essere dubbi: sto indicando
una coppia di reali.
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
1
3
INSIEMI IN RN
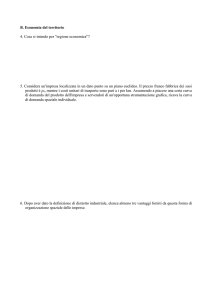
Altri esempi notevoli di sottoinsiemi di R2 sono poi anche gli intorni (circolari) di un punto.
Per definirli, esattamente come avviene in R, definiamo prima la distanza in
R2 . Diciamo distanza (euclidea) di x = (x1 , x2 ) e y = (y1 , y2 ) il numero
x2
p
5
2
2
d(x, y) = (x1 − y1 ) + (x2 − y2 ) .
Fissato allora un punto x0 = (x01 , x02 ), si dice intorno circolare di x0 di raggio
δ > 0 l’insieme dei punti del piano che hanno da x0 distanza (euclidea) minore
di δ. Essi, come è ovvio, riempiono un cerchio di centro x0 e raggio δ (cerchio
in realtà privato della circonferenza). È da notare che gli intorni circolari di x0
sono infiniti, tutti contengono il punto x0 e, considerato uno di essi di raggio
δ̄, ne esistono infiniti altri di raggio minore, tutti contenuti in esso. È chiaro
che tutte queste proprietà valevano anche per gli intorni dei punti in R.
x02
x0 δ
x01
x1
Richiamiamo brevemente in R2 le nozioni topologiche, già note in R, di punti interni, esterni, isolati, di frontiera e
di accumulazione di un insieme.
Definizione Dato un insieme A ⊂ R2 , un punto x0 si dice
• interno di A se esiste almeno un intorno circolare di x0 tutto contenuto in A;
• esterno di A se esiste almeno un intorno circolare di x0 tutto costituito da punti non appartenenti ad A;
• di frontiera di A se x0 non è né interno né esterno ad A. Significa allora che in qualunque intorno circolare di
x0 cadono almeno un punto di A e almeno un punto non appartenente ad A;
• isolato se x0 ∈ A ed esiste almeno un intorno circolare di x0 che non contiene alcun punto di A eccetto x0 ;
• di accumulazione di A se in qualunque intorno circolare di x0 cadono infiniti punti di A.
È importante inoltre l’ulteriore
Definizione Un insieme A ⊂ R2 si dice
• aperto se ogni punto di A è interno ad A;
• chiuso se il suo insieme complementare6 è aperto.
Osservazioni ed esempi.
⊲ Si può osservare che un punto isolato è certamente di frontiera, un punto interno è certamente di accumulazione,
punti esterni e punti isolati non possono essere di accumulazione. Inoltre si noti che i punti isolati di un insieme
appartengono certamente all’insieme, quelli esterni certamente non appartengono e infine quelli di frontiera, o
di accumulazione, possono appartenere oppure no all’insieme.
⊲ R2 è aperto e chiuso nello stesso tempo, da cui ∅ è anch’esso aperto e chiuso. Lo stesso accadeva in R.
⊲ Abbiamo già visto che un intervallo in R2 è aperto se e solo se è prodotto cartesiano di due intervalli (di R)
entrambi aperti ed è chiuso se e solo se è prodotto cartesiano di due intervalli entrambi chiusi.
⊲ In generale i punti esterni sono quelli che risultano interni al complementare dell’insieme in questione.
⊲ I punti di frontiera di un intervallo sono i punti che stanno sui lati del rettangolo, a prescindere dal fatto che
questi facciano parte oppure no del rettangolo stesso.
⊲ I punti di accumulazione di un intervallo sono tutti i punti che sono interni oppure di frontiera per l’intervallo.
Il loro insieme coincide quindi con l’intervallo chiuso.
5 Per indicare le coppie di numeri reali, cioè gli elementi di R2 , possiamo usare due notazioni alternative: o (x, y), come abbiamo fatto
fino ad ora, oppure (x1 , x2 ). È bene che lo studente si abitui ad utilizzare l’una o l’altra indifferentemente, anche perché nei corsi successivi
potrà vederle utilizzate entrambe. La prima è forse più semplice, ma la seconda ha il vantaggio di poter essere estesa ad un qualunque
numero di variabili. Tornando al significato della definizione di distanza, non dovrebbe essere difficile capire che sotto questa definizione si
nasconde uno dei più famosi teoremi della geometria, il teorema di Pitagora, e dovreste avere tutti una qualche conoscenza in merito.
6 Ricordo che, dato in generale un insieme X ed A ⊂ X, l’insieme degli elementi di X che non appartengono ad A si dice complementare
di A (rispetto ad X). Nel nostro caso abbiamo A ⊂ R2 e sottintendo che il complementare sia rispetto a tutto R2 .
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
1
4
INSIEMI IN RN
Vediamo ora alcuni esempi sugli intervalli.
y
1
Consideriamo in R2 l’insieme I = [0, 1) × (−1, 1]. Si tratta sostanzialmente di un rettangolo,
in cui alcune parti del bordo sono comprese ed altre escluse. È un insieme che non è né
aperto né chiuso. L’insieme dei suoi punti interni è l’insieme (0, 1)×(−1, 1), cioè il rettangolo
aperto. L’insieme dei suoi punti di frontiera è costituito dai lati del rettangolo.7 L’insieme
dei punti di accumulazione di I è l’intervallo [0, 1] × [−1, 1], cioè il rettangolo chiuso.
bc
x
1
−1
bc
Altro esempio. Consideriamo l’insieme
A = (−1, 1) × {0}.
y
L’insieme A è il prodotto cartesiano dell’intervallo (−1, 1) (sulle ascisse) e del punto
0 sulle ordinate, cioè è l’insieme delle coppie che hanno come prima componente un
x
numero scelto tra −1 e 1 e come seconda sempre 0. Ovviamente si tratta di un
−1
1
segmento orizzontale sull’asse x.
L’insieme A non ha punti interni. Questa è una situazione in qualche modo interessante, dato che l’intervallo
(−1, 1) ha punti interni in R. Poi possiamo affermare che tutti i punti di A sono di frontiera e sono di frontiera anche
gli estremi del segmento, cioè i punti (−1, 0) e (1, 0), che pure non fanno parte del segmento. I punti di accumulazione
di A sono dati dal segmento con i suoi estremi, cioè dall’insieme [−1, 1] × {0}.
Gli studenti si costruiscano altri esempi in proposito.
Tutto quanto detto per R2 può essere esteso in modo del tutto naturale ad Rn ,
x3
l’insieme delle n-uple ordinate di numeri reali. Da notare che, in tal caso, solo per
n = 3 si può dare ancora un’immagine geometrica, che sarà ambientata in quello che
1
si può chiamare lo spazio a tre dimensioni nel senso elementare e intuitivo del termine,
attrezzato con una terna di assi cartesiani ortogonali.
−1
Si possono chiamare intervalli in Rn i prodotti cartesiani di n intervalli di R. Ad
3
x2
esempio è un intervallo di R l’insieme
1
−1
A = [0, 1] × (−1, 0) × [−1, 1]
bc
la cui immagine geometrica è un parallelepipedo con le facce parallele ai piani
coordinati. Si osservi che non tutte le facce appartengono al parallelepipedo.
bc
x1
Si dirà intorno circolare di un punto x0 ∈ Rn di raggio δ l’insieme dei punti di Rn che hanno distanza euclidea da
x minore di δ, definendo distanza euclidea di x e y, dove x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ), il numero
v
u n
uX
d(x, y) = t (xi − yi )2 . 8
0
i=1
L’intorno circolare di un punto x0 ∈ R3 di raggio δ è rappresentato dalla sfera di centro x0 e raggio δ.
Si estendono ai sottoinsiemi di Rn , in modo del tutto analogo a quanto fatto in R2 , tutte le nozioni topologiche.
Come già in R e in R2 , anche in Rn si dice aperto ogni insieme i cui punti siano tutti punti interni. Abbiamo
già visto che, ad esempio, in R2 un rettangolo privato dei lati è un insieme aperto, e cosı̀ pure un cerchio privato
della circonferenza. In R3 sono aperti ad esempio un parallelepipedo privato delle facce oppure una sfera privata della
superficie sferica.
Si dirà poi chiuso un insieme che sia complementare (rispetto a Rn ) di un insieme aperto.
1.1
Simmetrie degli insiemi
Può essere utile in molti casi sfruttare un qualche tipo di simmetria degli insiemi di R2 (il discorso vale anche in R3 e
in Rn ma noi vedremo solo esempi in R2 ). Anzitutto vediamo quali tipi di simmetrie considerare. Qui indico con x e
y (anziché con x1 e x2 ) le coordinate cartesiane.
7 Si può darne una scrittura formale, ma non preoccupatevi più di tanto di questo. Si può scrivere che l’insieme dei punti di frontiera di
I è l’insieme
{0} × [−1, 1] ∪ {1} × [−1, 1] ∪ [0, 1] × {−1} ∪ [0, 1] × {1} .
che, se x = (x1 , . . . , xn ) ∈ Rn , si definisce norma euclidea di x il numero reale non negativo kxk =
x, y ∈ Rn , si può allora ridefinire d(x, y) = kx − yk.
8 Ricordo
A. Peretti – Corso di Matematica
Pn
i=1
x2i
1/2
. Dati allora
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
1
5
INSIEMI IN RN
Definizioni Sia A ⊂ R2 . Diciamo che A è simmetrico rispetto alle x se vale la seguente proprietà:
se (x, y) ∈ A allora (−x, y) ∈ A.
Diciamo invece che A è simmetrico rispetto alle y se vale la proprietà:
se (x, y) ∈ A allora (x, −y) ∈ A.
Quindi in pratica un insieme è simmetrico rispetto alle x se è simmetrico rispetto all’asse delle ordinate e, viceversa,
è simmetrico rispetto alle y se è simmetrico rispetto all’asse delle ascisse.
Nelle figure qui sotto sono rappresentati un insieme simmetrico rispetto alle x (a sinistra) ed un insieme simmetrico
rispetto alle y.
y
A
y
A
x
x
Esempi L’insieme A = (x, y) ∈ R2 : y ≤ 1 − x2 è simmetrico rispetto alle x. Se disegniamo l’insieme A la cosa
è evidente, ma lo stesso si può dimostrare anche con la definizione: se (x, y) ∈ A significa che y ≤ 1 − x2 . Ma allora
anche (−x, y) ∈ A dato che y ≤ 1 − (−x)2 , essendo questa equivalente alla precedente. Non c’è invece simmetria
rispetto alle y.9 L’insieme A = (x, y) ∈ R2 : (x − 1)2 + y 2 ≤ 1 è simmetrico rispetto alle y. Anche qui la rappresentazione grafica
di A porta subito ad accorgersi della simmetria. Con la definizione: se (x, y) ∈ A significa che (x − 1)2 + y 2 ≤ 1. Allora
anche (x, −y) ∈ A dato che (x − 1)2 + (−y)2 ≤ 1 equivale alla precedente. Non c’è simmetria rispetto alle x.
Osservazione
simmetrici sia rispetto alle x sia rispetto alle y. Ad esempio il cerchio
Ci sono insiemi che risultano
unitario A = (x, y) ∈ R2 : x2 + y 2 ≤ 1 lo è.10
Conviene considerare anche un altro tipo di simmetria.
y
Definizione Sia A ⊂ R2 . Diciamo che A è simmetrico rispetto all’origine se vale la
seguente proprietà
se (x, y) ∈ A allora (−x, −y) ∈ A.
A
x
La figura a fianco presenta un esempio di insieme in cui vale questa proprietà.
Esempio L’insieme A = (x, y) ∈ R2 : x = y è simmetrico rispetto all’origine. Si tratta ovviamente della retta
bisettrice del primo e terzo quadrante. Con la definizione: se (x, y) ∈ A allora x = y, ma quindi −x = −y, e pertanto
(−x, −y) ∈ A. Si osservi che A non è simmetrico né rispetto alle x né rispetto alle y. Si osservi che anche l’insieme
raffigurato qui sopra, pur essendo simmetrico rispetto all’origine, non è simmetrico né rispetto alle x né rispetto alle
y.
Osservazione Come osservato un attimo fa un insieme può non essere simmetrico né rispetto alle x né rispetto alle
y ma esserlo rispetto all’origine. Invece vale senz’altro che un insieme simmetrico rispetto alle x e rispetto alle y è
simmetrico rispetto all’origine.
Lo si intuisce da considerazioni grafiche o lo si dimostra facilmente con le definizioni: se A è simmetrico sia rispetto
alle x sia rispetto alle y, dal fatto che (x, y) ∈ A possiamo dedurre che (−x, y) ∈ A (per la simmetria rispetto alle x)
e da quest’ultima dedurre che (−x, −y) ∈ A (per la simmetria rispetto alle y). Quindi è provata la simmetria rispetto
all’origine.
9 Dovrebbe
essere (x, −y) ∈ A, cioè −y ≤ 1 − x2 , cosa che non possiamo dedurre dalla y ≤ 1 − x2 .
è rilevante che sia quello unitario, cioè di raggio 1: qualunque cerchio con centro nell’origine è simmetrico sia rispetto alle x sia
rispetto alle y. Esercizio: qual è la condizione necessaria e sufficiente affinché un cerchio sia simmetrico rispetto alle sole x?
10 Non
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
2
6
FUNZIONI DA RN A R
Funzioni da Rn a R
2
Nella seconda parte del corso abbiamo studiato le funzioni reali di variabile reale, cioè le funzioni da R a R.
Qui consideriamo le funzioni da Rn a R, dette anche funzioni reali di n variabili.11 Più in generale ci occuperemo
di funzioni definite in un sottoinsieme A di Rn , a valori reali. Scriveremo
f : A ⊂ Rn → R.
Come sempre, se vogliamo riferirci alla funzione nel suo complesso, scriviamo semplicemente f ; se invece, posto
x = (x1 , . . . , xn ), vogliamo indicare il numero reale che è immagine di x attraverso la funzione f , scriveremo f (x)
oppure f (x1 , . . . , xn ).
Si dice come sempre dominio (o campo di esistenza o insieme di definizione) della funzione f l’insieme dei punti
per cui esiste il corrispondente secondo la legge f , cioè l’insieme degli x per cui esiste f (x).
L’insieme di definizione può essere fornito esplicitamente, unitamente alla legge che definisce la funzione. Oppure,
nel caso sia fornita soltanto la legge, può essere chiesto di determinare l’insieme di definizione: in tal caso questo è il
più grande sottoinsieme di Rn in cui è definita l’espressione che fornisce la legge di corrispondenza.
Se f : A ⊂ Rn → R, il simbolo f (A) indica come sempre l’immagine della funzione f , cioè l’insieme dei valori che
la funzione assume in corrispondenza degli elementi di A. Chiaramente f (A) ⊂ R.
Come per le funzioni di una variabile, chiamiamo grafico di una funzione f : A ⊂ Rn → R l’insieme
n
o n
o
Gf = x, f (x) : x ∈ A = x1 , . . . , xn , f (x1 , . . . , xn ) : (x1 , . . . , xn ) ∈ A .
Si tratta di un sottoinsieme dello spazio Rn+1 . Quindi le funzioni di una variabile hanno grafico in R2 (e nella II parte
di questo corso abbiamo imparato a trovare il grafico di tali funzioni), le funzioni di due variabili hanno grafico in R3 .
Non è possibile disegnare il grafico di funzioni di più di due variabili, dato che è un sottoinsieme almeno di R4 .
Il grafico di una f : A ⊂ R2 → R è generalmente una superficie in R3 . Ad esempio, il grafico della funzione
f : R2 → R definita da f (x1 , x2 ) = x1 + x2 è un piano nello spazio R3 .
Esempi
Sono esempi di funzioni definite in opportuni sottoinsiemi di R2 le seguenti funzioni:
⊲ f1 (x1 , x2 ) = x31 + x22 + x1 x2 + 1
p
⊲ f2 (x1 , x2 ) = x21 + x22
⊲ f3 (x1 , x2 ) =
x1 + x2
x21 + x22
⊲ f4 (x1 , x2 ) =
ln(x1 + x22 − 1)
3x2
⊲ f5 (x1 , x2 ) = max(x1 , x2 ).
12
In questi casi non è esplicitamente indicato l’insieme di definizione e, come detto, si sottintende quindi che esso sia
il più ampio sottoinsieme di R2 in cui ha senso l’espressione analitica che definisce la funzione.
Negli esempi proposti il campo di esistenza di f1 , f2 , f5 è tutto R2 .
x2
Per la f3 occorre che il denominatore non si annulli, quindi deve essere x21 + x22 6= 0. Il
campo di esistenza è quindi R2 \ {(0, 0)}, cioè il complementare dell’insieme {(0, 0)}
1
(tutto il piano ad eccezione dell’origine).
x1 = 1 − x22
Per la f4 l’unica condizione è che l’argomento del logaritmo sia positivo, dato che il
denominatore è sempre diverso da zero. Quindi deve essere x1 + x22 − 1 > 0, cioè
x1
x1 > 1 − x22 . Ricordando la geometria analitica della parte I del corso si ha che il
campo di esistenza, cioè l’insieme
{(x1 , x2 ) ∈ R2 : x1 > 1 − x22 },
−1
è la parte di piano evidenziata in grigio qui a fianco. È un insieme aperto.
Vediamo altri esempi di funzioni da Rn a R.
III parte abbiamo studiato, tra le altre cose, particolari funzioni da Rn a Rm , quelle che abbiamo chiamato trasformazioni lineari.
tratta della funzione che associa al punto (x1 , x2 ) il massimo tra x1 e x2 .
11 Nella
12 Si
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
2
7
FUNZIONI DA RN A R
• Funzioni lineari. Sia v ∈ Rn e sia v = (v1 , v2 , . . . , vn ). La funzione f : Rn → R definita da
f (x) = hv, xi
13
= v1 x1 + v2 x2 + . . . + vn xn
è lineare, come abbiamo già visto nelle lezioni della parte III. Abbiamo anche visto che ogni funzione lineare da
Rn a R è di questa forma, cioè si può scrivere come prodotto interno di un vettore fissato v per il vettore x.
Se n = 2 si ha
x2 v x + v x = 0
1 1
2 2
f (x1 , x2 ) = v1 x1 + v2 x2 (quindi ad esempio f (x1 , x2 ) = 3x1 + 12 x2 ).
Il grafico di questa funzione, qualunque siano i coefficienti, è un piano per
l’origine in R3 . 14 Osserviamo che l’insieme
n
o
(x1 , x2 ) ∈ R2 : f (x1 , x2 ) = 0 ,
v2
v
x1
v1
cioè l’insieme delle soluzioni dell’equazione v1 x1 + v2 x2 = 0, è in R2 la retta
ortogonale (perpendicolare) al vettore v = (v1 , v2 ).
Con n = 3 le funzioni lineari sono quelle del tipo
f (x1 , x2 , x3 ) = v1 x1 + v2 x2 + v3 x3
e l’insieme delle soluzioni dell’equazione v1 x1 + v2 x2 + v3 x3 = 0 è questa volta il piano (in R3 ) ortogonale
(perpendicolare) al vettore v = (v1 , v2 , v3 ).
• Forme quadratiche. Sia A una matrice n × n. La funzione f : Rn → R definita da
f (x) = hAx, xi
15
si chiama forma quadratica associata ad A. Ad esempio, se n = 2 e
a11 a12
, si ha f (x1 , x2 ) = a11 x21 + a12 x1 x2 + a21 x2 x1 + a22 x22 .
A=
a21 a22
Nel caso particolare in cui A sia una matrice diagonale di elementi λ1 , λ2 , con λ1 6= 0, λ2 6= 0, si ha
f (x1 , x2 ) = λ1 x21 + λ2 x22 .
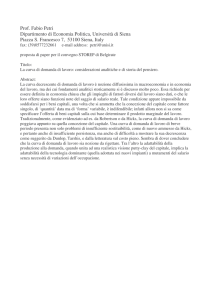
Il grafico di f dipende in modo cruciale dal segno di λ1 e λ2 . Lasciando allo studente il compito di convincersi
di quanto segue, mi limito ad elencare i tre casi possibili, accompagnandoli con un grafico.
Se λ1 > 0 e λ2 > 0, come ad esempio in f (x1 , x2 ) = 3x21 + 2x22 , il grafico di f è un paraboloide. I valori della
funzione sono evidentemente sempre non negativi e quindi il paraboloide sta nel semispazio delle x3 ≥ 0 (figura
sotto a sinistra). Si può anche scrivere che f (R2 ) = [0, +∞).
Se λ1 < 0 e λ2 < 0 il grafico di f è ancora un paraboloide. I valori della funzione sono evidentemente sempre
non positivi e quindi il paraboloide sta nel semispazio delle x3 ≤ 0 (figura al centro). Si può anche scrivere che
f (R2 ) = (−∞, 0].
Se λ1 > 0 e λ2 < 0 il grafico di f è un iperboloide (a una falda). La funzione può assumere sia valori positivi sia
valori negativi (figura a destra). In questo caso f (R2 ) = R.
x3
x3
x3
x2
x2
x1
x1
x2
x1
P
che la scrittura hx, yi, dove x e y sono due vettori di Rn , indica il prodotto interno dei due: hx, yi = n
i=1 xi yi .
funzioni lineari in una variabile sono le funzioni del tipo f (x) = vx, con v ∈ R. Sono quindi quelle che hanno per grafico una retta
per l’origine.
15 Si tratta del prodotto interno di Ax, che è un vettore di Rn dato dal prodotto di A per x, per il vettore x.
13 Ricordo
14 Le
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
2
8
FUNZIONI DA RN A R
Alle forme quadratiche e in particolare allo studio del segno di queste è dedicata la prossima dispensa.
Osservazione Il caso in cui uno dei due coefficienti λ1 , λ2 è nullo è meno significativo. Vale comunque la pena
osservare che (mettiamo sia λ1 > 0 e λ2 = 0) in tal caso si ha f (x1 , x2 ) = λ1 x21 e il valore di f dipende dalla
sola x1 . Si tratta di un paraboloide degenere e si intuisce facilmente che il grafico si ottiene facendo muovere la
parabola x3 = λ1 x21 lungo l’asse x2 .
Qui sotto riporto i grafici di alcune forme quadratiche, ottenuti con un software scientifico. Il grafico a destra è
quello di una forma quadratica del tipo f (x1 , x2 ) = λ1 x21 con λ1 > 0.
2
0,5
1
0,4
1,5
0,5
1
-1
1
0,5
1
0
1
-0,5
0,50,5 0 -0,5
-1
y
x
0
-0,5
-0,5
00
0,5
0,5
yx-0,5 1
0,3
-1
0,2
-1
-1
-1
1
0,5
0,1
-0,5
y
00
-0,5
0,5
0
1
x
-1
• Polinomi. Un monomio in Rn è una funzione della forma
(x1 , . . . , xn ) 7→ xr11 · · · xrnn ,
dove r1 , . . . , rn sono interi non negativi. Si chiama grado del monomio il numero intero non negativo r1 +. . .+rn .
Un polinomio è una combinazione lineare di monomi. Il grado di un polinomio è il massimo dei gradi dei monomi
di cui è combinazione lineare.
Ad esempio, è un monomio in tre variabili la funzione f (x1 , x2 , x3 ) = x1 x22 x33 ; si tratta di un monomio di sesto
grado. Un esempio di polinomio è la funzione g(x1 , x2 , x3 ) = 2x1 x22 x33 − 3x4 x32 x23 ; è un polinomio di nono grado.
Il più generale polinomio di secondo grado in R2 è
P (x1 , x2 ) = ax21 + bx22 + cx1 x2 + dx1 + ex2 + f,
con a, b, c, d, e, f ∈ R e almeno uno dei coefficienti a, b, c diverso da zero (altrimenti è ancora un polinomio ma
non è più di secondo grado).
Il più generale polinomio di secondo grado in R3 è
P (x1 , x2 , x3 ) = ax21 + bx22 + cx23 + dx1 x2 + ex1 x3 + f x2 x3 + gx1 + hx2 + ix3 + j,
con a, b, . . . , j ∈ R e almeno uno dei coefficienti a, b, . . . , f diverso da zero. In generale non si tratta ovviamente
di una forma quadratica (lo è se e solo se g = h = i = j = 0). Volendo lo si può vedere come la somma di una
forma quadratica, di una funzione lineare e di una costante.
• Funzioni radiali.
Una funzione f : Rn → R si dice radiale se esiste una funzione f0 : [0, +∞) → R tale che
f (x) = f0 (kxk), per ogni x ∈ Rn .
16
La funzione f0 si dice il profilo di f . Più in generale la funzione profilo può essere definita in un intervallo del
tipo [0, r) e la funzione radiale f in un intorno dell’origine di raggio r.
Ad esempio, la funzione f (x1 , x2 ) = x21 + x22 è radiale, in quanto
x21 + x22 = k(x1 , x2 )k2 .
Il profilo è la funzione f0 : [0, +∞) → R con f0 (t) = t2 .
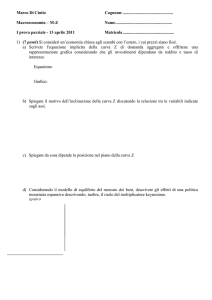
Osservazione Il grafico di una funzione radiale definita in R2 si ottiene “facendo ruotare il suo profilo” attorno
all’asse x3 . Ecco alcuni esempi di funzioni radiali, con i relativi grafici.
16 La definizione può risultare di difficile comprensione. Si noti che f è funzione di n variabili, mentre f e funzione di una variabile, cioè
0
di un numero reale. Infatti l’argomento di f0 è la norma del vettore x, che è appunto un numero reale. In sostanza la definizione dice che
il valore che la funzione associa ad x dipende soltanto dalla norma di x o, in altre parole, che a punti alla stessa distanza dall’origine la
funzione associa lo stesso valore.
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
9
FUNZIONI DA RN A R
2
⊲ f (x1 , x2 ) = x21 + x22 , definita in tutto R2 ; come detto ha profilo f0 : [0, +∞) → R con f0 (t) = t2 .
p
⊲ g(x1 , x2 ) = x21 + x22 , definita in tutto R2 ; ha profilo f0 : [0, +∞) → R con f0 (t) = t.
p
⊲ h(x1 , x2 ) = 1 − x21 − x22 , definita nel cerchio unitario
n
o
B(0, 1) = x ∈ R2 : kxk ≤ 1 ;
ha profilo f0 : [0, 1] → R con f0 (t) =
√
1 − t2 .
x3
x3
x3
(x1,0,Ö1-x12)
Gf
(x1,0,x12 )
Gh
Gg
(x1,0,x1 )
x2
x1
x2
x2
x1
x1
Il grafico di f è il paraboloide già incontrato prima; il grafico di g è una superficie conica con vertice nell’origine;
Il grafico di h è una calotta sferica con centro nell’origine.
Esercizio 2.1
Si descriva il campo di esistenza delle seguenti funzioni, specificando se si tratta di insiemi aperti,
chiusi o né aperti né chiusi:
1+x+y
(a) f (x, y) = ln(x − y + 1)
(b) f (x, y) =
1 − 2x + 3y
p
p
(c) f (x, y) = x + y 2 + 1
(d) f (x, y) = 1 − x2 − y 2
(e) f (x, y) = ln(1 − 2x2 − y 2 )
(f)
f (x, y) =
(g) f (x, y) = ln(1 − xy)
(h)
f (x, y) =
Esercizio 2.2
(a)
(c)
(e)
(g)
√
xy
p
1 − y2
Si determini il campo di esistenza delle seguenti funzioni e lo si rappresenti graficamente.
p
√
√
f (x, y) = x(y + 1)
(b) f (x, y) = x + 1 − 1 − x − y
1−x
(d) f (x, y) = ln y + ln(x + y)
f (x, y) = ln
s 1−y
x
x2 + y 2 − 4
f (x, y) =
(f) f (x, y) = ln
y−1
x − y2 + 1
r
(x − 1)2 + y 2 − 4
xy + 1
(h) f (x, y) = ln
f (x, y) =
x+y+1
4 − x2 − (y − 1)2
Esercizio 2.3
Si scriva l’espressione analitica del profilo delle seguenti funzioni radiali:
p
2
2
(a) f (x, y) = e−x −y
(b) f (x, y) = x2 + y 2 + 1
1
1 + x2 + y 2
p
(e) f (x, y) = x2 + y 2 − x2 − y 2
(c) f (x, y) =
2.1
(d)
f (x, y) = ln(2 − x2 − y 2 )
(f)
f (x, y) = 1 + x4 + 2x2 y 2 + y 4
Simmetrie di una funzione
Talvolta può essere utile sfruttare alcune caratteristiche di simmetria di una funzione di più variabili. Qui consideriamo
solo le funzioni di due variabili e torno ad indicare gli elementi di R2 con la notazione (x, y).
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
2
10
FUNZIONI DA RN A R
Definizioni Sia A ⊂ R2 un insieme simmetrico rispetto alle x.
(i) Diciamo che una funzione f definita in A è pari rispetto alle x se vale la seguente proprietà:
se (x, y) ∈ A allora f (−x, y) = f (x, y).
(ii) Diciamo che una funzione f definita in A è dispari rispetto alle x se vale la seguente proprietà:
se (x, y) ∈ A allora f (−x, y) = −f (x, y).
Sia A ⊂ R2 un insieme simmetrico rispetto alle y.
(iii) Diciamo che una funzione f definita in A è pari rispetto alle y se vale la proprietà:
se (x, y) ∈ A allora f (x, −y) = f (x, y).
(iv) Diciamo che una funzione f definita in A è dispari rispetto alle y se vale la proprietà:
se (x, y) ∈ A allora f (x, −y) = −f (x, y).
Sia A ⊂ R2 un insieme simmetrico rispetto all’origine.
(v) Diciamo che una funzione f definita in A è pari rispetto all’origine se vale la seguente proprietà:
se (x, y) ∈ A allora f (−x, −y) = f (x, y).
(vi) Infine diciamo che una funzione f definita in A è dispari rispetto all’origine se vale la seguente proprietà:
se (x, y) ∈ A allora f (−x, −y) = −f (x, y).
Osservazione Lo studente avrà notato le evidenti analogie con le simmetrie delle funzioni di una variabile (funzioni
pari o dispari).
Esempi
⊲ La funzione f (x, y) = x2 + y 3 è pari rispetto alle x. Si noti anche che non è dispari rispetto alle y.
⊲ La funzione f (x, y) = x2 y 3 è pari rispetto alle x e dispari rispetto alle y.
⊲ La funzione f (x, y) = x2 y 2 è pari, sia rispetto alle x sia rispetto alle y. Si tratta di una funzione pari rispetto
all’origine.
⊲ La funzione f (x, y) = x2 y 3 è dispari rispetto all’origine, pari rispetto alle x e dispari rispetto alle y.
⊲ La funzione f (x, y) = xy 3 è pari rispetto all’origine, dispari rispetto alle x e dispari rispetto alle y.
2.2
Insiemi di livello e curve di livello
Farsi un’idea del grafico di una funzione di più variabili è piuttosto difficile. Come già detto, anzi, non è nemmeno
possibile rappresentare il grafico se il numero di variabili è maggiore di 2. Nel caso di due variabili il grafico è una
superficie in R3 e non ci sono tecniche generali come quelle che abbiamo studiato nella Parte II.
Una valida alternativa al grafico è data dagli insiemi di livello, che nel caso di due variabili sono le curve di livello.
In generale si ha
Definizione Data una funzione f : A ⊂ Rn → R, si definisce insieme di livello k di f l’insieme dei punti di A in
cui la funzione ha valore k, cioè formalmente
Lk = x ∈ A : f (x) = k .
Si tratta quindi di un sottoinsieme del dominio della funzione.
Nel caso n = 2 tali insiemi sono solitamente curve nel piano e prendono quindi il nome di curve di livello k.
Ovviamente l’insieme (la curva) cambia al variare del valore k. Studiare le curve di livello significa appunto capire
come variano le curve al variare del livello.
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
2
11
FUNZIONI DA RN A R
Esempio Consideriamo la funzione f (x, y) = x2 + y 2 . Naturalmente, se pensiamo ad un livello negativo, ad esempio
−1, dobbiamo dire che la curva di livello −1 non c’è poiché la funzione non può avere valore negativo. Pertanto la
curva di livello −1 è l’insieme vuoto. La curva di livello 0 invece non è vuota, ma si riduce al solo punto origine (0, 0).17
Se ora fissiamo un livello positivo, ad esempio 1, la curva corrispondente questa volta c’è ed è proprio una curva in
senso letterale: si tratta dell’insieme delle soluzioni dell’equazione x2 + y 2 = 1 e quindi, come noto, della circonferenza
di centro
√ l’origine e raggio 1. Al variare del livello k (positivo) abbiamo circonferenze con centro sempre nell’origine e
raggio k. Quindi al crescere di k le curve di livello sono circonferenze di raggio crescente.
Esempio Consideriamo la funzione f (x, y) = xy. La curva di livello 0 è l’insieme delle soluzioni dell’equazione
xy = 0 e cioè i due assi cartesiani.18 La curva di livello k positivo è l’insieme delle soluzioni dell’equazione xy = k e
cioè i punti di un’iperbole centrata nell’origine e rami nel primo e terzo quadrante. Anche con k negativo si hanno i
punti di un’iperbole centrata nell’origine, ma con rami nel secondo e quarto quadrante.
Osservazione Le curve di livello possono essere una valida alternativa al grafico della funzione in quanto, anche se
non ci mostrano i valori della funzione, ci dicono però in quali punti la funzione ha valore costante, al variare di questo
valore. È la tecnica usata nelle mappe geografiche per indicare la morfologia del terreno (il livello indica la quota sul
livello del mare) oppure nelle mappe meteo (il livello indica la pressione al suolo o in quota). Nelle mappe geografiche
la presenza di curve di livello molto ravvicinate indica una variazione molto rapida della quota, e quindi una zona di
pendenza molto forte, mentre curve di livello molto lontane indicano regioni sostanzialmente piatte.
Vediamo qualche altro esempio.
Esempi
• Le curve di livello k della funzione f (x, y) = x + y 2 + 1 si ottengono a partire dall’equazione x + y 2 + 1 = k, cioè
x = −y 2 + k − 1. Si tratta di parabole con asse dato dall’asse x e concave verso sinistra. Al crescere del valore
k la parabola si “sposta verso destra”.
• Le curve di livello k della funzione f (x, y) = ln(x + y) si ottengono a partire dall’equazione ln(x + y) = k, cioè
x + y = ek , cioè y = ek − x. Si tratta ovviamente di rette di pendenza −1 e ordinata all’origine ek , quindi
certamente positiva.19 Al crescere di k la retta si “sposta verso l’alto”.
p
p
• Le curve di livello k della funzione f (x, y) = 1 − x2 − y 2 si ottengono a partire dall’equazione 1 − x2 − y 2 =
k, cioè 1p
− x2 − y 2 = k 2 , cioè ancora x2 + y 2 = 1 − k 2 . Se k è negativo non c’è curva di livello, dato che l’equazione
iniziale 1 − x2 − y 2 = k non ha certamente soluzioni. Se k = 0 abbiamo
√ la circonferenze di centro l’origine
e raggio 1. Se k > 0 abbiamo circonferenze di centro l’origine e raggio 1 − k 2 : la quantità sotto radice deve
però essere positiva, e quindi deve anche essere k < 1. Infine per k = 1 la curva si riduce alla sola origine. Si
riconoscerà la morfologia della calotta sferica rappresentata un paio di pagine fa.
Esercizio 2.4
Si descrivano le curve di livello 1 delle seguenti funzioni.
1+x+y
(a) f (x, y) = ln(x − y + 1)
(b) f (x, y) =
1 − 2x + 3y
p
p
(c) f (x, y) = x + y 2 + 1
(d) f (x, y) = 1 − x2 − y 2
(e) f (x, y) = ln(1 − 2x2 − y 2 )
(f)
f (x, y) =
(g) f (x, y) = ln(1 − xy)
(h)
f (x, y) =
2.3
√
xy
p
1 − y2
Restrizione di una funzione ad una curva
Esaminiamo ora un concetto che, pur essendo presente anche nella trattazione delle funzioni di una variabile, trova
però il suo significato più pieno con le funzioni di più variabili. Tale concetto ci sarà utile in seguito, soprattutto
quando parleremo di limiti, continuità e derivabilità. Si tratta del concetto di restrizione di una funzione.
Prima però serve il concetto di curva in Rn . Per non appesantire l’esposizione, considero solo curve in R2 .
Chiamiamo curva in R2 una funzione continua γ definita in un intervallo I di R a valori in R2 . Pertanto abbiamo
γ : I → R2 ,
con γ(t) = γ1 (t), γ2 (t) ,
17 Quindi
si noti che la curva può non esserci oppure può essere qualcosa che solitamente non chiameremmo “curva”.
curva di livello 0 è quindi l’insieme dei punti che stanno in almeno uno dei due assi.
19 Questo fa sı̀ che la retta stia nell’insieme di esistenza della funzione, che non è tutto R2 .
18 La
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
2
12
FUNZIONI DA RN A R
dove γ1 , γ2 sono funzioni continue definite nell’intervallo I.20
L’immagine della curva γ, cioè il sottoinsieme di R2
n
o
γ1 (t), γ2 (t) : t ∈ I ,
si chiama sostegno della curva γ. Purtroppo talvolta si identifica la curva con il suo sostegno. Nel linguaggio comune
infatti dicendo curva nel piano intendiamo l’insieme dei punti che formano la figura geometrica. Nella nostra definizione
sarebbe meglio chiamare quest’ultima il sostegno (o l’immagine) della curva e chiamare curva soltanto la funzione che
ha per immagine la figura geometrica.
Esempi
• La funzione γ(t) = (0, t), con t ∈ R è una curva in R2 . La sua immagine (sostegno) è l’asse delle ordinate.
• La funzione γ(t) = (1 + t, 1 − t), con t ∈ [−1, 1] è una curva in R2 . La sua immagine è un segmento nel piano.21
• La funzione γ(t) = (t, t2 ), con t ∈ [0, 1] è una curva in R2 . La sua immagine è un arco di parabola.22
Data una funzione f : A ⊂ R2 → R e data una curva γ : I → R2 , con immagine contenuta in A, chiamiamo
restrizione di f alla curva γ la funzione f ◦ γ, cioè la funzione (composta) che a t associa f (γ(t)).23
Esempi
• Data la funzione f (x1 , x2 ) = x1 − x2 , la sua restrizione alla curva γ(t) = (t, 0), con t ∈ R, è una restrizione di f
all’asse x1 .24 Si tratta della funzione g(t) = f (t, 0) = t.
La restrizione della stessa funzione alla curva γ(t) = (t, t), con t ∈ R, è una restrizione di f alla retta di equazione
x1 = x2 . Si tratta della funzione g(t) = f (t, t) = 0, con t ∈ R.
• La restrizione della funzione f (x1 , x2 ) =
f (t, t) =
1
2,
con t ∈ (0, +∞).
x1 x2
x21 +x22
alla curva γ(t) = (t, t), con t ∈ (0, +∞) è la funzione g(t) =
Una restrizione della stessa funzione alla parte di parabola di equazione x2 = x21 che sta nel primo quadrante si
t
può ottenere con la funzione g(t) = f (t, t2 ) = 1+t
2 , con t ∈ (0, +∞).
Anche se ho presentato i concetti di curva e di restrizione nel caso bidimensionale, tutto si potrebbe estendere in
modo immediato al caso n-dimensionale.
A titolo di esempio, una restrizione della funzione
f : R3 → R,
2
2
2
con f (x1 , x2 , x3 ) = e−x1 −x2 −x3
alla retta passante per il punto (1, 1, 0) e parallela all’asse x3 si ottiene25 considerando la restrizione di f alla curva
γ : R → R3 , con
γ(t) = (1, 1, t);
si tratta pertanto della funzione
2
g(t) = f (γ(t)) = f (1, 1, t) = e−2−t .
Esercizio 2.5
Si determini una curva che parametrizza la retta di equazione x + y + 1 = 0.
Esercizio 2.6
Si determini una curva che parametrizza la parabola di equazione x + y 2 + 1 = 0.
20 In pratica quindi una curva è una funzione che alla variabile reale t associa due componenti, γ (t) e γ (t), e queste sono funzioni
1
2
continue di t.
21 Si può vedere cosı̀: nello stesso modo in cui facevamo nella parte III, possiamo scrivere (1 + t, 1 − t) = (1, 1) + t(1, −1), quindi al variare
di t in tutto R si otterrebbe la retta che contiene il vettore (1, −1) traslata del vettore (1, 1). Con t ∈ [−1, 1] si ottiene solo una parte di
questa retta e cioè un segmento. Possiamo anche precisare che gli estremi del segmento, che si ottengono con i valori estremi di t (−1 e 1),
sono i punti (0, 2) e (2, 0).
22 Qui si può ragionare cosı̀: se poniamo x = t e y = t2 , allora tra x e y sussiste la relazione y = x2 , che come sappiamo individua nel
piano una parabola. Con t ∈ [0, 1] si ottiene una parte della parabola, quella compresa tra i punti (0, 0) e (1, 1).
23 Il nome restrizione deriva da fatto che in pratica non considero la f su tutto il suo dominio, ma soltanto sui punti della curva γ. Si
noti però che la restrizione, essendo la funzione composta, non è definita sul sostegno della curva, cioè in R2 , ma sull’intervallo I in cui è
definita la curva. I valori della restrizione sono però i valori di f sul sostegno della curva.
24 Non è unica la restrizione di f all’asse x : ad esempio la funzione g(t) = f (t3 , 0) = t3 è un’altra restrizione di f all’asse x .
1
1
25 I punti di questa retta si ottengono traslando l’asse x del vettore (1, 1, 0): dato che l’asse x è individuato dal vettore (0, 0, 1), allora
3
3
i punti della retta si possono esprimere con t(0, 0, 1) + (1, 1, 0), cioè con (1, 1, t).
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
3
13
LIMITE
Esercizio 2.7
Si determini una curva che parametrizza il ramo destro dell’iperbole di equazione x2 − y 2 − 1 = 0.
Esercizio 2.8
Si scriva la restrizione della funzione f (x, y) = x+exy alla curva γ(t) = (t, ln t), con t ∈ (0, +∞).
Esercizio 2.9
Si scriva la restrizione della funzione f (x, y) = x/y alla curva γ(t) = (t, 1/t), con t ∈ (0, +∞).
2
Esercizio 2.10
t ∈ (0, +∞).
3
Si scriva la restrizione della funzione f (x, y) = x + ln(x + y) alla curva γ(t) = (1/t, t), con
Limite
Si potrebbe formulare una definizione rigorosa del concetto di limite per funzioni di più variabili, ricalcando sostanzialmente la definizione valida in precedenza. Non abbiamo però visto nel dettaglio quella definizione e non la vedremo
nemmeno nella sua generalizzazione a più variabili.
Verremmo cosı̀ a definire rigorosamente il significato di scritture come
lim
(x1 ,x2 )→(x01 ,x02 )
f (x1 , x2 ) = ℓ ,
lim
(x1 ,x2 )→(x01 ,x02 )
f (x1 , x2 ) = +∞ ,
lim
(x1 ,x2 )→(x01 ,x02 )
f (x1 , x2 ) = −∞.
e anche come
lim
(x1 ,x2 )→∞
f (x1 , x2 ) = ℓ
26
,
lim
(x1 ,x2 )→∞
f (x1 , x2 ) = +∞ ,
lim
(x1 ,x2 )→∞
f (x1 , x2 ) = −∞.
Mi limito soltanto a presentare la possibilità di indagare sul limite di una funzione di due variabili operando delle
restrizioni sulla funzione stessa.
Osservazione Detto in modo molto impreciso ma che rende bene l’idea, il limite di una funzione di più variabili è
“più difficile che esista” rispetto al limite di una funzione di una sola variabile.
A titolo di esempio, si consideri la funzione
f (x1 , x2 ) =
x1 x2
,
+ x22
x21
con (x1 , x2 ) 6= (0, 0).
(1)
Si può verificare facilmente che
lim
(x1 ,x2 )→(0,0)
f (x1 , x2 )
(2)
non esiste, sulla base di un risultato, che enuncio soltanto, ma che appare tuttavia molto plausibile. Lo dico prima
a parole, poi formalizzo. Se il limite di una funzione, per (x1 , x2 ) che tende ad un certo punto (x01 , x02 ), esiste, allora
se tendiamo a questo punto lungo alcune particolari curve, allora dobbiamo trovare sempre lo stesso risultato, cioè lo
stesso limite, indipendentemente da quale curva consideriamo.
Se cioè
lim 0 0 f (x1 , x2 ) esiste, finito o infinito, chiamiamolo λ
(x1 ,x2 )→(x1 ,x2 )
2
e se γ è una curva in R con γ(t0 ) = (x01 , x02 ), allora
lim (f ◦ γ)(t)
27
t→t0
esiste ed è uguale a λ.
Quindi, se il limite esiste, deve essere lo stesso lungo una qualunque restrizione. Ma allora, se troviamo che ci sono
due diverse restrizioni lungo le quali i limiti sono diversi, possiamo dire che il limite non esiste.
Tornando alla nostra funzione (1), consideriamo la curva
γ(t) = (t, 0),
con t ∈ R.
Si tratta di una curva che ha per sostegno l’asse x1 (le ascisse). Se calcoliamo ora il limite lungo questa restrizione
otteniamo
0
lim (f ◦ γ)(t) = lim f (t, 0) = lim 2 = 0.
t→0
t→0
t→0 t
26 Si osservi che ho scritto (x , x ) → ∞ e non ±∞. Per le funzioni di due variabili la variabile tende ad un “infinito senza segno”
1
2
(potrebbe essere che la x1 tenda a +∞ e la x1 tenda invece a −∞). Quindi si dice che la variabile tende ad ∞, intendendo che (x1 , x2 ) si
allontana infinitamente dall’origine, in tutte le direzioni possibili.
27 Si noti che la funzione f potrebbe non essere definita in (x0 , x0 ) e quindi f ◦ γ potrebbe non essere definita in t .
0
1
2
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
4
14
CONTINUITÀ
Anche lungo la restrizione dell’asse x2 il limite è zero (lo si verifichi).
Ma se consideriamo la curva
γ(t) = (t, t),
con t ∈ R,
cioè quella che ha per sostegno la bisettrice del primo e terzo quadrante, otteniamo
t2
1
= .
t→0 2t2
2
lim (f ◦ γ)(t) = lim f (t, t) = lim
t→0
t→0
Il limite (2) quindi non esiste.
Un altro esempio:
lim
(x1 ,x2 )→∞
ex1 +x2
non esiste.
Infatti, se consideriamo la restrizione di f (x1 , x2 ) = ex1 +x2 alla curva γ(t) = (t, 0), con t ∈ (0, +∞), otteniamo
la funzione (f ◦ γ)(t) = et , che, per t → +∞, tende a +∞. Se invece consideriamo la restrizione di f alla curva
γ(t) = (−t, 0), con t ∈ (0, +∞), otteniamo la funzione (f ◦ γ)(t) = e−t , che, per t → +∞, tende a zero. Notiamo che
entrambi i sostegni delle due curve “tendono all’infinito” per t → +∞.28 Quindi il limite non esiste, essendo diverso
su due restrizioni che “tendono entrambe all’infinito”.
x−y
, si calcolino i limiti di f nell’origine lungo le seguenti restrizioni:
Esercizio 3.1
Data la funzione f (x, y) =
x+y
(a) la retta di equazione y = x
(b) la parabola di equazione y = x2
(c) la parabola di equazione x = y 2
Esercizio 3.2
Data la funzione f (x, y) =
x3 + y 3
, si calcolino i limiti nell’origine di f lungo le seguenti restrizioni:
x2 + y 2
(a) la retta di equazione y = x
(b) la parabola di equazione y = x2
(c) la parabola di equazione x = y 2
(d) la curva di equazione y = ex − 1
4
Continuità
Veniamo ora al concetto di continuità, già trattato nella II parte per le funzioni di una variabile. La definizione è
formalmente la stessa che abbiamo già incontrato.
Definizione Se f : A ⊂ Rn → R e se x0 è un punto del dominio A, si dice che f è continua in x0 se si ha che
lim f (x) = f (x0 ).
x→x0
Se f è continua in tutti i punti di A si dice che f è continua in A.
Per le funzioni continue valgono in Rn tutti i teoremi già visti in R. A tale proposito ricordo che sono di fondamentale
importanza tutti i teoremi che affermano che somme e prodotti di funzioni continue sono funzioni continue. Anche
quozienti di funzioni continue, dove il quoziente esiste, sono funzioni continue. Infine funzioni composte di funzioni
continue sono funzioni continue.
Ad esempio sono continue, nei rispettivi campi di esistenza, le funzioni
• f (x1 , x2 ) = 2x21 x2 + 3x1 x32
• g(x1 , x2 , x3 ) = ln(x1 − x2 + x3 )
2
−(x1 ,x2 ,...,xn )
• h(x1 , x2 , . . . , xn ) = e
.
• Anche la funzione
1
f (x1 , x2 , . . . , xn ) = Pn
i=1
dove esiste,29 è continua.
28 Possiamo
xi
,
dire che i punti di una curva γ : (a, +∞) → R2 tendono all’infinito
P per t → +∞ se kγ(t)k → +∞ per t → +∞.
la funzione esiste nei punti (x1 , x2 , . . . , xn ) ∈ Rn in cui si ha n
i=1 xi 6= 0.
29 Chiaramente
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
5 SOLUZIONI DEGLI ESERCIZI
15
Vale in Rn un teorema che generalizza il fondamentale Teorema di Weierstrass, che lo studente ha visto per funzioni
di una variabile.
Teorema (di Weierstrass) Se f è definita e continua in un sottoinsieme chiuso e limitato di Rn , allora valgono le
seguenti proprietà:
(i) f è limitata e la sua immagine è un insieme chiuso e limitato;30
(ii) f assume quindi un valore massimo e un valore minimo.
Se in particolare f è definita e continua in un intervallo chiuso e limitato di Rn , allora
(iii) l’immagine di f è un intervallo chiuso e limitato.
È una conseguenza del teorema di Weierstrass il
Teorema (degli zeri) Se f è continua in un intervallo chiuso e limitato di Rn ed assume in esso valori di segno
opposto, essa in qualche punto necessariamente si annulla.
Osservazione Come già in una sola variabile, per la validità della tesi è cruciale che la funzione sia definita in un
intervallo.31
5
Soluzioni degli esercizi
Esercizio 2.1
(a) f (x, y) = ln(x − y + 1). L’unica condizione di esistenza è data dalla disequazione x − y + 1 > 0, cioè y < x + 1. Il
campo di esistenza di f è quindi il semipiano che si trova al di sotto delle retta di equazione y = x + 1. La retta
non fa parte dell’insieme. Si tratta di un insieme aperto, dato che tutti i suoi punti sono interni all’insieme.
1+x+y
. La condizione di esistenza è data dal non annullarsi del denominatore, cioè dalla condi1 − 2x + 3y
zione 1 − 2x + 3y 6= 0, che si può anche scrivere y 6= 23 x − 13 . Si tratta quindi dei punti del piano che non stanno
sulla retta di equazione y = 32 x − 31 . L’insieme è aperto, dato che tutti i punti sono interni.
p
(c) f (x, y) = x + y 2 + 1. La condizione di esistenza è data da x + y 2 + 1 ≥ 0, soddisfatta da tutti i punti del piano
che stanno alla destra della parabola di equazione x = −y 2 − 1. Si tratta di una parabola con asse coincidente
con l’asse x, con la concavità rivolta verso sinistra. Il campo di esistenza di f è un insieme chiuso, dato che i
punti sulla parabola fanno parte dell’insieme.
p
(d) f (x, y) = 1 − x2 − y 2 . La condizione di esistenza è data da 1 − x2 − y 2 ≥ 0, cioè x2 + y 2 ≤ 1, soddisfatta
da tutti i punti del piano appartenenti al cerchio di centro l’origine e raggio 1 (bordo compreso). Il campo di
esistenza di f è un insieme chiuso, dato che i punti sulla circonferenza fanno parte dell’insieme.
(b) f (x, y) =
(e) f (x, y) = ln(1 − 2x2 − y 2 ). La condizione di esistenza è data da 1 − 2x2 − y 2 > 0, cioè 2x2 + y 2 < 1, soddisfatta
da tutti i punti del piano interni all’ellisse di centro l’origine e semiassi a = √12 e b = 1 (bordo escluso). Il campo
di esistenza di f è un insieme aperto, dato che i punti sull’ellisse non fanno parte dell’insieme.
√
(f) f (x, y) = xy. La condizione di esistenza è data da xy ≥ 0, che è verificata nel primo oppure nel terzo quadrante,
bordo compreso. Si tratta di un insieme chiuso.
(g) f (x, y) = ln(1 − xy). La condizione di esistenza è data da 1 − xy > 0, cioè xy < 1. La disuguaglianza è verificata
nella regione di piano compresa tra i due rami dell’iperbole equilatera di equazione xy = 1. I rami dell’iperbole
si trovano nel primo e nel terzo quadrante. I punti che stanno sull’iperbole non sono compresi e quindi l’insieme
è aperto.
p
(h) f (x, y) = 1 − y 2 . La condizione di esistenza è data da 1 − y 2 ≥ 0, cioè y 2 ≤ 1, che è verificata se −1 ≤ y ≤ 1.
Quindi il campo di esistenza di f è la regione di piano compresa tra le due rette di equazione y = −1 e y = 1.
L’insieme è chiuso in quanto il bordo è compreso.
30 In
generale non è detto che l’immagine sia un intervallo; vedi il successivo punto (iii).
la verità basta che la funzione sia definita in un insieme che non sia “fatto da due parti separate”.
31 Per
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
5 SOLUZIONI DEGLI ESERCIZI
16
Esercizio 2.2
p
(a) f (x, y) = x(y + 1).
La condizione di esistenza è x(y + 1) ≥ 0, che si può esprimere attraverso i
sistemi
x≥0
x≤0
oppure
y+1≥0
y+1≤0
cioè
x≥0
y ≥ −1
oppure
y
x
−1
x≤0
y ≤ −1.
L’insieme è raffigurato a fianco.32 Il bordo è compreso.
√
√
(b) f (x, y) = x + 1 − 1 − x − y.
La condizione di esistenza è espressa dal sistema
x+1≥0
1 − x − y ≥ 0.
Si noti che, a differenza del caso precedente, qui si vuole che entrambi gli
argomenti delle radici siano non negativi. Quindi c’è un unico sistema che
esprime le condizioni di esistenza. Il sistema equivale a
x ≥ −1
y ≤ 1 − x.
L’insieme è raffigurato a fianco.33 Il bordo è compreso.
1−x
(c) f (x, y) = ln
.
1−y
La condizione di esistenza è 1−x
1−y > 0, che si può esprimere attraverso i sistemi
cioè
1−x>0
1−y >0
x<1
y<1
oppure
1−x < 0
1−y < 0
oppure
x>1
y > 1.
y
1
−1
1
x
y
1
1
x
L’insieme è raffigurato a fianco. Il bordo non è compreso.
(d) f (x, y) = ln y + ln(x + y).
La condizione di esistenza è espressa dal sistema
y>0
y>0
cioè
x+y > 0
y > −x.
L’insieme è raffigurato a fianco. Il bordo non è compreso.
y
x
32 L’insieme è l’unione dei due insiemi che sono soluzione dei due sistemi. Si noti che per risolvere ciascuno dei sistemi si effettua
un’intersezione: ad esempio nel primo le soluzioni sono l’intersezione del semipiano x ≥ 0 con il semipiano y ≥ −1. Per ottenere le soluzioni
complessive si devono invece unire quelle trovate in precedenza.
33 Qui l’insieme è l’intersezione dei due semipiani, in quanto vogliamo che le due condizioni valgano entrambe. Si noti ancora la differenza
con l’esercizio precedente: in quello la condizione era che il prodotto dei due fattori fosse maggiore o uguale a zero (cosa che avviene se i
due fattori hanno lo stesso segno, e quindi c’erano i due sistemi), mentre in questo vogliamo che i due fattori siano entrambi positivi (e
quindi c’è un solo sistema).
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
5 SOLUZIONI DEGLI ESERCIZI
(e) f (x, y) =
s
x2 + y 2 − 4
.
y−1
La condizione di esistenza è
i sistemi
2
x + y2 − 4 ≥ 0
y−1>0
cioè
x2 +y 2 −4
y−1
x2 + y 2 ≥ 4
y>1
17
≥ 0, che si può esprimere attraverso
oppure
x +y −4≤0
y−1<0
oppure
x2 + y 2 ≤ 4
y < 1.
2
y
2
1
2x
−2
−2
L’insieme è raffigurato a fianco. Il bordo è solo in parte compreso: i
punti che stanno sulla circonferenza sono compresi, quelli sulla retta no.
x
(f) f (x, y) = ln
.
x − y2 + 1
La condizione di esistenza è
sistemi
x>0
x − y2 + 1 > 0
cioè
2
y
x
x−y 2 +1
> 0, che si può esprimere attraverso i
x<0
oppure
x − y2 + 1 < 0
x>0
x > y2 − 1
oppure
x
−1
x<0
x < y 2 − 1.
L’insieme è raffigurato a fianco. Il bordo non è compreso.
r
xy + 1
.
x+y+1
La condizione di esistenza è
i sistemi
xy + 1 ≥ 0
x+y+1>0
(g) f (x, y) =
cioè
xy+1
x+y+1
xy ≥ −1
y > −x − 1
≥ 0, che si può esprimere attraverso
oppure
oppure
xy + 1 ≤ 0
x+y+1<0
xy ≤ −1
y < −x − 1.
(x−1)2 +y 2 −4
4−x2 −(y−1)2
oppure
x
−1
−1
L’insieme è raffigurato a fianco. Il bordo è solo in parte compreso.
(x − 1)2 + y 2 − 4
(h) f (x, y) = ln
.
4 − x2 − (y − 1)2
La condizione di esistenza è
attraverso i sistemi
(x − 1)2 + y 2 > 4
x2 + (y − 1)2 < 4
y
y 3
> 0, che si può esprimere
(x − 1)2 + y 2 < 4
x2 + (y − 1)2 > 4.
b
1
1
b
Le corrispondenti equazioni individuano due circonferenze, rispettivamente di centro (1, 0) e (0, 1), entrambe di raggio 2. L’insieme è
raffigurato a fianco. Il bordo non è compreso.
−1
−1
3
x
Esercizio 2.3
2
(a) Il profilo di f è la funzione f0 : [0, +∞) → R √
definita da f0 (t) = e−t .
p
2
2
−(
x2 +y 2 )2
Infatti risulta: f (x, y) = f0 ( x2 + y 2 ) = e
= e−x −y .
A. Peretti – Corso di Matematica
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
5 SOLUZIONI DEGLI ESERCIZI
18
√
(b) Il profilo di f è la funzione f0 : [0, +∞) →qR definita da f0 (t) = t2 + 1.
p
p
p
Infatti risulta: f (x, y) = f0 ( x2 + y 2 ) = ( x2 + y 2 )2 + 1 = x2 + y 2 + 1.
1
(c) Il profilo di f è la funzione f0 : [0, +∞) → R definita da f0 (t) = 1+t
2.
p
1
1
2
2
√
= 1+x2 +y2 .
Infatti risulta: f (x, y) = f0 ( x + y ) =
2
2 2
1+(
x +y )
√
2
(d) Il profilo di f è la funzione fp
0 : [0, 2) → R definita
p da f0 (t) = ln(2 − t ).
2
2
2
2
2
Infatti risulta: f (x, y) = f0 ( x + y ) = ln(2 − ( x + y ) ) = ln(2 − x2 − y 2 ).
(e) Il profilo di f è la funzione fp
R definita da f0 (t) = t − t2 .
0 : [0, +∞) →p
2
2
Infatti risulta: f (x, y) = f0 ( x + y ) = x2 + y 2 − x2 − y 2 .
(f) Il profilo di f è la funzione f0 : [0, +∞) → R p
definita da f0 (t) =p
1 + t4 .
2
2 2
2
2
Infatti risulta: f (x, y) = 1 + (x + y ) = f0 ( x + y ) = 1 + ( x2 + y 2 )4 .
Esercizio 2.4
(a) La curva di livello 1 ha equazione ln(x − y + 1) = 1, cioè x − y + 1 = e. Si tratta di una retta.
(b) La curva di livello 1 ha equazione
(c) La curva di livello 1 ha equazione
all’asse x.
(d) La curva di livello 1 ha equazione
1+x+y
1−2x+3y
= 1, cioè 3x − 2y = 0. Si tratta di una retta per l’origine.
p
x + y 2 + 1 = 1, cioè x + y 2 = 0. Si tratta di una parabola con asse parallelo
p
1 − x2 − y 2 = 1, cioè x2 + y 2 = 0. La curva si riduce ad un punto, l’origine.
(e) La curva di livello 1 ha equazione ln(1 − 2x2 − y 2 ) = 1, cioè 1 − 2x2 − y 2 = e, cioè 2x2 + y 2 = 1 − e. L’equazione
non ha soluzioni e quindi la curva è l’insieme vuoto.
√
(f) La curva di livello 1 ha equazione xy = 1, cioè xy = 1. La curva è un’iperbole che sta nel primo e terzo
quadrante.
(g) La curva di livello 1 ha equazione ln(1 − xy) = 1, cioè 1 − xy = e, cioè xy = 1 − e. La curva è un’iperbole che
sta nel secondo e quarto quadrante.
p
(h) La curva di livello 1 ha equazione 1 − y 2 = 1, cioè y 2 = 0. L’equazione definisce l’asse x.
Esercizio 2.5
Possiamo scrivere l’equazione nella forma y = −x − 1, da cui una curva che parametrizza la retta è la curva γ(t) =
(t, −t − 1), con t ∈ R.
Esercizio 2.6
Possiamo scrivere l’equazione nella forma x = −y 2 − 1, da cui una curva che parametrizza la parabola è la curva
γ(t) = (−t2 − 1, t), con t ∈ R.
Esercizio 2.7
Possiamo scrivere l’equazione nella forma x2 = 1 + y 2 . Osservando
che è richiesto il ramo di destra, quello cioè con x
p
2 . Una curva che parametrizza il ramo dell’iperbole è
positivo, possiamo
scrivere
l’equazione
equivalente
x
=
1
+
y
√
la curva γ(t) = ( 1 + t2 , t), con t ∈ R.
Esercizio 2.8
2
La restrizione è la funzione f (γ(t)) = t + et ln t , definita per t ∈ (0, +∞).
Esercizio 2.9
La restrizione è la funzione f (γ(t)) =
A. Peretti – Corso di Matematica
t
1/t
= t2 , definita per t ∈ (0, +∞).
UNIVR – Sede di Vicenza
IV-1
FUNZIONI REALI DI PIÙ VARIABILI
5 SOLUZIONI DEGLI ESERCIZI
19
Esercizio 2.10
La restrizione è la funzione f (γ(t)) =
1
t
+ ln( 1t + t), definita per t ∈ (0, +∞).
Esercizio 3.1
(a) Lungo la retta di equazione y = x, ad eccezione dell’origine, la funzione f vale zero. Il limite è quindi zero.
(b) Lungo la parabola di equazione y = x2 , e quindi lungo la curva γ(t) = (t, t2 ), ad eccezione dei punti (0, 0) e
2
1−t
(−1, 1), la restrizione di f è la funzione g(t) = t−t
t+t2 = 1+t . Per t → 0 il limite vale 1.
(c) Lungo la parabola di equazione x = y 2 , e quindi lungo la curva γ(t) = (t2 , t), ad eccezione dei punti (0, 0) e
2
t−1
(1, −1), la restrizione di f è la funzione g(t) = tt2 −t
+t = t+1 . Per t → 0 il limite vale −1.
Esercizio 3.2
(a) Lungo la retta di equazione y = x, e quindi lungo la curva γ(t) = (t, t), la restrizione di f è la funzione
2t3
g(t) = 2t
2 = t, e quindi il limite è zero.
(b) Lungo la parabola di equazione y = x2 , e quindi lungo la curva γ(t) = (t, t2 ), la restrizione di f è la funzione
3
t+t4
+t6
g(t) = tt2 +t
4 = 1+t2 . Per t → 0 il limite vale 0.
(c) Lungo la parabola di equazione x = y 2 , e quindi lungo la curva γ(t) = (t2 , t), la restrizione di f è ancora la
t+t4
funzione g(t) = 1+t
2 , per cui il limite per t → 0 vale ancora 0.
(d) Lungo la curva di equazione y = ex − 1, e quindi lungo la curva γ(t) = (t, et − 1), la restrizione di f è la funzione
3
+(et −1)3
g(t) = tt2 +(e
t −1)2 , per cui il limite è
t
t3 (1 + ( e t−1 )3 )
t3 + (et − 1)3
=
lim
= lim t = 0.34
lim 2
t
t→0 t2 (1 + ( e −1 )2 )
t→0
t→0 t + (et − 1)2
t
34 Si
ricordi il limite notevole limt→0
A. Peretti – Corso di Matematica
et −1
t
= 1.
UNIVR – Sede di Vicenza