PROGETTO DI UN SISTEMA DI CONTROLLO RETROAZIONATO
Sintesi Proff A.Messina – C. Utizi
Progettare un sistema di controllo retroazionato significa realizzare un sistema di controllo che
soddisfi determinate specifiche espresse in termini di parametri statici e dinamici
Statiche
Errore a regime
Sensibilità ai disturbi
Dinamiche
Nel tempo
In frequenza
SPECIFICHE
S% , Ta , Tm , Ts, Tr
Pulsazione di risonanza ωr ,Mf ,
Mg, Larghezza di banda ωt
Si ricorda che:
Pulsazione di risonanza ωr: pulsazione alla quale si verifica il picco di risonanza r n 1 2 2
Picco di risonanza massimo: valore che assume il modulo di Ga al variare di ω. Esso è funzione del
coefficiente di smorzamento secondo la relazione Mp
1
2 1
2
Banda passante ωt: pulsazione alla quale il modulo della funzione si riduce di 3 db .
Le tecniche di progetto dei sistemi retroazionato sono molte; noi utilizzeremo una tecnica semplice
applicata ai sistemi di tipo continuo, lineare, tempo invariante che consiste nel partire da un sistema
retroazionato esistente “correggendolo” in modo da soddisfare le specifiche assegnate (correzione
per tentativi).
ESEMPIO
Nel nostro esempio di controllo di velocità di un motore in c.c. si suppone:
1. di voler ottenere un uscita desiderata per esempio d = 300 rad/sec. Tale velocità è
posta in ingresso alla dinamo tachimetrica.
2. che il mio sistema di controllo rispetti una certa specifica sull’errore. Per esempio
imponiamo un e % = 10 %
I dati a disposizioni sono:
Amplificatore
Motore
Dinamo
considerata come una costante di valore pari a 10
1
0,13 (1 0,0212 s) (1 0,00312 s)
0,095
V
rad / s
Segnale di riferimento R
10V
G
R
+
Controllore
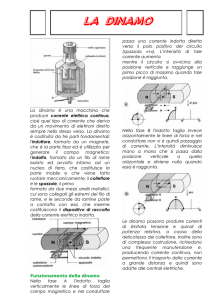
K
Amplificatore
Motore in C.C
-
Condizionatore
segnale
Dinamo tachimetrica
H
PROGETTO STATICO
Passo 1
Per il progetto del sistema bisogna innanzitutto ricavare la f.d.t. sia del Condizionatore di
segnale sia del Controllore K. Per ricavare la f.d.t. del Controllore K, bisogna tener conto
dell’errore statico imposto.
Per ricavare la f.d.t. del Condizionatore si parte dalla considerazione che volendo ottenere in
uscita una d (desiderata) di 300 rad/sec, tale velocità viene applicata all’ingresso della dinamo
tachimetrica tramite la retroazione.
Conoscendo la f.d.t. della dinamo la Vu della dinamo è:
Vudt Gdt d 0,095 300 28,5V
Conoscendo il valore del nostro segnale di riferimento che è uguale a 10V (uscita del blocco
Condizionatore di segnale) si può ricavare la f.d.t. richiesta del Condizionatore:
10 Gcond 2,85
Gcond
10
0,35
28,5
Per ricavare la f.d.t. del Controllore K devo tener presente, come detto, quale valore percentuale
di errore statico devo rispettare(in percentuale solo per i sistemi di tipo 0).
Nel nostro caso e =10%, il che significa che posso commettere un errore del più o meno 10 %.
Essendo l’uscita desiderata pari a 300 rad/sec il nostro errore può essere al massimo di +/- 30
rad/sec cioè l’uscita può variare tra 270 rad/sec e 330 rad/sec.
Come si fa a imporre tale specifica ?
Si utilizza la tabella dell’errore.
Passo 2
Poiché l’ingresso considerato è di tipo a gradino 10V, l’errore statico,detto errore di posizione
perchè il sistema è di tipo 0 non avendo poli nell’origine, vale, così come da tabella:
e
R
H (1 H Kp)
Trovo prima il Kp che rappresenta il guadagno statico della catena di andata e poi H:
Gandata K 10
1
0,13 (1 0,0212 s) (1 0,00312 s)
Si pone quindi s =0 e si ricava:
Kp
K 10
K 77
0,13
H Gdt Gcond 0,095 0,35 0,033
Poiché l’uscita desiderata è pari a 300 rad/sec il nostro errore può essere al massimo di +/- 30
rad/sec cioè l’uscita può variare tra 270 rad/sec e 330 rad/sec si ottiene:
e
R
H (1 H Kp)
30
10
0,033 (1 0,033 K 77 )
Ora possiamo trovare il K incognito del Condizionatore.
30
1
10 0,033 (1 K 2,54 )
2,54 K
0,033 (1 K 2,54 )
1
3
1
1 10,1 1
3 0,033
La f.d.t. del controllore associabile ad una costante K vale:
K
9,1
3,6
2,54
Un sistema retroazionato si può considerare, a differenza di quello a catena aperta, insensibile
alle variazione dei parametri della f.d.t. della catena diretta andata.
La sensibilità della f.d.t. ad anello chiuso alle variazioni dei parametri del ramo di reazione è
uguale a -1 se G
. (s) H (s) 1
E’ necessario che i componenti del ramo di reazione abbiano la massima stabilità nel tempo
perché una variazione dei parametri della linea di reazione si trasmette interamente sulla
risposta.
PROGETTO DINAMICO in frequenza
Passo 1
Per ricavare i parametri dinamici è necessario innanzitutto tracciare i diagrammi di Bode che ci
consentono di determinare i Mg e Mf. E stabilire se il sistema è stabile o meno.
Per tracciare i diagrammi di Bode devo ovviamente utilizzare la funzione di trasferimento ad
anello aperto Gap e con Matlab otterrò:
MATLAB DIAGRAMMA DI BODE
EDU» s=tf('s')
Transfer function:
s
EDU» gap=9.2/((1+s*21.2e-3)*(1+s*3.12e-3))
Transfer function:
9.2
-----------------------------6.614e-005 s^2 + 0.02432 s + 1
EDU» bode(gap)
EDU>> margin(gap)
Bode Diagrams
Gm = Inf, Pm=54.74 deg. (at 308.89 rad/sec)
20
Phase (deg); Magnitude (dB)
0
-20
-40
-60
0
-50
-100
-150
-200
1
10
2
10
3
10
4
10
Frequency (rad/sec)
Considerato che i valori di riferimento affinché un sistema si consideri stabile sono:
Mf > 45°
Mg >15
Il sistema in questione risulta stabile visti i risultati ottenuti.
Passo 2
Per ricavare la risposta al gradino bisogna utilizzare la funzione di trasferimento con reazione
Gr.
Prima si considera quella della catena di andata Ga , conosciuto ormai K (nel nostro caso K=10.
Gandata K 10
1
0,13 (1 0,0212 s) (1 0,00312 s)
e successivamente quella che tiene conto del blocco di reazione H ossia la f.d.t. Gr.
con Matlab otterrò:
Step Response
From: U(1)
350
EDU» s=tf('s')
300
EDU» 36/0.13
250
Amplitude
ans =
276.9231
EDU» g=277/((1+s*0.0212)*(1+s*0.00312))
To: Y(1)
Transfer function:
s
Transfer function:
277
-----------------------------6.614e-005 s^2 + 0.02432 s + 1
200
150
100
50
EDU» h=0.095*0.35
0
0
0.005
h=
0.01
0.015
0.02
0.025
0.03
0.035
Pole-zero
map
Time (sec.)
400
0.0332
EDU» Gr=feedback(g,h)
300
Transfer function:
277
---------------------------------6.614e-005 s^2 + 0.02432 s + 10.21
200
Imag Axis
100
EDU» step(10*Gr)
EDU» pzmap(Gr)
0
-100
-200
-300
Per ricavare i poli l’istruzione è:
EDU» damp(Gr)
Eigenvalue
Damping
-1.84e+002 + 3.47e+002i
-1.84e+002 - 3.47e+002i
-400
-200
Freq. (rad/s)
4.68e-001
4.68e-001
3.93e+002
3.93e+002
-150
-100
Real Axis
-50
0
50