UNIVERSITÀ DEGLI STUDI DI NAPOLI
“FEDERICO II”
Scuola Politecnica e delle Scienze di Base
Area Didattica di Scienze Matematiche Fisiche e Naturali
Dipartimento di Fisica “Ettore Pancini”
Laurea Triennale in Fisica
La formulazione di Feynman della meccanica
quantistica
Relatore:
Prof. Luigi Rosa
Candidato:
Francesco Flora
Matr. N85/649
Anno Accademico 2015/2016
Indice
Introduzione
1
1 L’approccio di Feynman
1.1 Esperimento delle due fenditure e assiomi . . . . . . . . . .
1.1.1 Descrizione e interpretazione dell’esperimento . . .
1.1.2 Gli assiomi di Feynman . . . . . . . . . . . . . . . .
1.2 Costruzione dell’integrale sui cammini . . . . . . . . . . .
1.2.1 Path integral come somma sulle possibili alternative
1.2.2 Il limite classico . . . . . . . . . . . . . . . . . . . .
1.2.3 Il path integral . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
2 Sviluppo dei concetti
2.1 Metodi per valutare K(b,a) . . . . . . . . . . . . . . . . . . .
2.1.1 Eventi in successione . . . . . . . . . . . . . . . . . .
2.1.2 Integrali gaussiani . . . . . . . . . . . . . . . . . . . .
2.1.3 Equazione differenziale per ψ. Formulazione di Schrödinger . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Sistemi fisici elementari . . . . . . . . . . . . . . . . . . . . .
2.2.1 Particella libera . . . . . . . . . . . . . . . . . . . . .
2.2.2 Moto in un campo di potenziale . . . . . . . . . . . .
.
.
.
.
.
.
.
5
5
5
8
11
11
14
16
17
. 17
. 17
. 20
.
.
.
.
22
29
29
33
3 La fase di Berry
35
3.0.1 Calcolo della fase di Berry tramite il path integral . . . 37
3.0.2 Trasformazioni della fase geometrica per cambio di base 41
Conclusioni
44
Bibliografia
46
1
Introduzione
Dai lavori pioneristici di Planck e Einstein sull’aspetto corpuscolare della radiazione elettromagnetica, ci è voluto più di mezzo secolo perchè si arrivasse
a costruire una teoria capace di spiegare i fenomeni che si osservavano su scala atomica. Inizialmente la teoria quantistica riusciva solo a fornire alcune
regole con cui calcolare gli spettri di emissione e assorbimento. Intorno al
1930, principalmente grazie al lavoro di Bohr, Heisenberg e Schrödinger, si
giunse finalmente a formulare una teoria capace di descrivere in maniera soddisfacente il comportamento del mondo microscopico. Nonostante i concetti
fondamentali fossero stati compresi, la teoria appariva ancora molto diversa
da come noi la conosciamo ora. Una formulazione assiomatica basata sulla
teoria degli operatori autoaggiunti su spazi di Hilbert si ebbe solo dopo i
lavori di Dirac e Von Neumann negli anni ’50. Questa si basa a sua volta
sulla "Interpretazione di Copenaghen", nome con il quale si indica l’insieme di prescrizioni con cui descrivere i fenomeni atomici suggerite dai padri
della teoria quantistica. Sottolineamo da subito che questa, chiamata infatti
"formulazione tradizionale", è sicuramente la forma in cui la teoria è meglio
conosciuta e quella che conduce a calcoli più maneggevoli grazie alla grande
forza sintetica del suo formalismo. Nonostante col tempo abbia ricevuto numerosissime conferme sperimentali, il dibattito sui concetti fondamentali su
cui si fonda non è scemato con gli anni, anzi.
Come è noto, infatti, la meccanica quantistica si distingue dalle altre teorie
fisiche per il suo carattere fortemente contro-intuitivo. Quasi sicuramente ciò
è dovuto al fatto che essa affronta problemi legati alla natura microscopica
del mondo, per i quali i concetti a cui siamo abituati (come posizione e velocità di un corpo) si rivelano essere di scarsa applicabilità: "Ma gli atomi o
le particelle elementari non sono così reali; formano un mondo di potenzialità e possibilità piuttosto che di fatti o oggetti...Gli atomi non sono cose"
[3]. Forse proprio per questa sua controintuitività, la meccanica quantistica
ha conosciuto col tempo diverse formulazioni molto differenti tra loro. L’interpretazione di Bohm e quella di Feynman, di cui parleremo nel presente
lavoro di tesi, sono alcune tra le più celebri. Tutte rappresentano in qual2
Introduzione
3
che modo il tentativo di rispondere positivamente ad un’idea comune: che
la teoria che descrive gli oggetti fondamentali della natura debba mantenere un certo grado di "verosimiglianza" con le idee tradizionali che ci hanno
guidato per secoli. Ma anzichè essere scettici di fronte ad un insieme di leggi
così distanti da quelle del mondo che ci circonda dovremmo, a parere di chi
scrive, rimanere meravigliati dal fatto che la mente umana sia stata capace
di comprendere e descrivere una regione dell’Universo, così piccola eppure
tanto vasta, lontanissima da quella che ospita le nostre azioni quotidiane.
In quest’ottica non dovrebbe stupirci il fatto che sembra impossibile trovare
parole per descrivere i "fatti" e le "cose" del mondo atomico. Non sono forse
anche le parole, e le immagini che costruiamo con esse, un prodotto di una
mente abituata a sperimentare solo una parte molto limitata dell’immensa
varietà dei fenomeni che compongono l’Universo?
Alla luce di queste osservazioni dovrebbe apparire chiaro il fatto che sia indispensabile, per una tale teoria, l’uso di un formalismo matematico astratto.
Il linguaggio matematico, a differenza di quello naturale, non descrive cose
ma riconosce proprietà e relazioni tra gli oggetti a cui risulta applicabile. Per
questo motivo la formulazione assiomatica si è rivelata essere la più adatta.
Ciò non toglie però che la fisica sia una scienza naturale e come tale ha il
compito di descrivere e comprendere i fenomeni che si osservano. Un elevato
grado di astrazione nelle teorie fondamentali potrebbe avere l’effetto collaterale di mascherare le idee fisiche che stanno alla base di ogni formalismo
utilizzato. In questo senso, ma sempre entro i limiti di cui abbiamo discusso,
una formulazione della teoria quantistica che usi un linguaggio più vicino a
quello del mondo classico ci sembra interessante e meritevole di approfondimento.
L’approccio che si seguirà nel seguente elaborato di tesi parte proprio da queste ultime osservazioni: tenteremo di presentare la formulazione di Feynman
nel modo più "intuitivo" possibile, giustificando le affermazioni con l’evidenza dei fatti sperimentali ma presentando la teoria in modo rigoroso, senza
far riferimento a concetti classici nella sua costruzione. Enunceremo le idee
fondamentali attraverso degli assiomi e il percorso che seguiremo ci condurrà
in maniera naturale a definire un nuovo oggetto matematico: il path integral.
In realtà l’introduzione di questo strumento di indagine costituisce forse il
maggior merito della formulazione di Feynman. Il path integral si è rivelato
fondamentale infatti per una corretta trattazione delle teorie di gauge che
ricoprono un ruolo di massima importanza nella fisica moderna.
Va precisato che non si affronterà minimamente il problema della misura che,
come fa notare Feynman [2] è quasi certamente legato al tentativo di amplificare su larga scala, tramite apparecchi di misura, fenomeni che avvengono
a livello atomico. Circa questo argomento egli afferma che:
Introduzione
4
"Obviously, we are again involved in the consequences of the large size of
ourselves and of our measuring equipment. The usual separation of observer
and observed which is now needed in analyzing measurements in quantum
mechanics should not really be necessary, or at least should be even more
thotoughly analyzed. What seems to be needed is the statistical mechanics of
amplifying apparatus."[2, p.23]
Sembra quindi che la discontinuità nel processo di misura sia in qualche modo legata all’emergere del "mondo classico", infinitamente grande rispetto
alle quantità tipiche delle interazioni elementari. Alla luce di queste parole,
anche noi ignoreremo nel presente elaborato problemi di questo genere.
La scelta di parlare in termini "ingenui", ma comunque rigorosi, e per quanto
possibile vicini ai concetti più familiari, deriva probabilmente dalle esperienze
di vita di chi scrive. Personalmente ho sempre apprezzato molto parlare di
scienza con chi non fosse strettamente un "addetto ai lavori". Premettendo
che non ho nessuna velleità di collocarmi sull’una o l’altra sponda, penso
sia molto interessante, per l’uomo di scienza e per il profano, tentare chi di
descrivere chi di intendere le idee fondamentali che stanno alla base della
nostra comprensione del mondo. Questo per due motivi:
per chi è del mestiere, perchè mi sembra che si possa affermare di aver capito qualcosa fino in fondo solo se si è in grado di spiegarla anche in termini
elementari;
per chi ha scelto di dedicare i suoi sforzi in altre direzioni invece, perchè credo
che le rivoluzioni ideologiche che sono avvenute nel mondo della scienza siano
di una tale meraviglia che anche un bambino, o forse sopratutto un bambino,
dovrebbe poterle contemplare.
Capitolo 1
L’approccio di Feynman
1.1
1.1.1
Esperimento delle due fenditure e assiomi
Descrizione e interpretazione dell’esperimento
Il concetto di probabilità usato in meccanica quantistica non è diverso da
quello classico. Quando diciamo che la probabilità di un certo evento è p,
intendiamo che se l’esperimento viene ripetuto molte volte, allora ci si aspetta che la frazione dei risultati per i quali l’evento risulta essersi verificato,
rispetto al totale degli esperimenti, tenda a p al crescere del numero di volte
in cui si effettua l’esperimento. Ciò che invece risulta drammaticamente diverso in meccanica quantistica è il modo in cui si calcolano le probabilità per
un dato evento. Questi stravolgimenti, come noto, sono tanto più evidenti
quanto più la scala di lunghezze, energie e tempi si avvicina a quella tipica
delle interazioni elementari.
Per capire come ciò si renda necessario, consideriamo l’esperimento (concettuale nel nostro caso) delle due fenditure di cui riassumiamo brevemente i
risultati di maggior interesse.
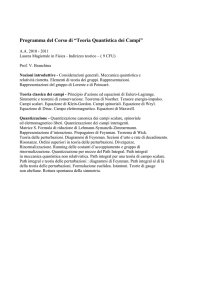
In riferimento alla Figura 1.1 schematizziamo la situazione nel seguente modo:
nella posizione A si trova un emettitore di elettroni che supponiamo avere
tutti la stessa energia ma che si propaghino in ogni direzione fino a sbattere
contro una barriera posta in C. Qui sono presenti due fori in posizione simmetrica rispetto alla sorgente S attraverso cui gli elettroni possono passare.
Infine in posizione B è posto uno schermo dove supponiamo siano presenti
molti rivelatori di elettroni (al limite un continuo), ognuno dei quali posto a
distanza x dal centro. Supponiamo di condurre l’esperimento con un flusso
di bassa intensità: in questo caso l’esperienza mostra che i rivelatori registreranno l’arrivo degli elettroni come singole unità tutte uguali e separati da
5
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
6
Figura 1.1: Schema dell’apparato sperimentale.
intervalli temporali durante i quali non arriva niente. E’ in base a quest’evidenza che possiamo affermare che in questo caso gli elettroni si comportano
come particelle. Da questa conclusione, e cioè che gli elettroni ci appaiono
come entità indivisibili, potremmo ipotizzare che:
Ipotesi: Ogni elettrone che va da S a x deve passare attraverso il foro 1 o il
foro 2.
⇓
Conseguenza: la probabilità per ogni elettrone di arrivare in x è la somma
di due parti: P1 , che è la probabilità di arrivarci passando per il foro numero
1, e P2 definita in maniera analoga.
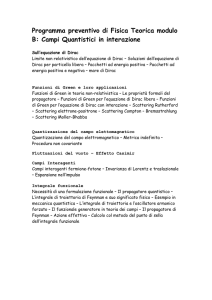
Nella Figura 1.2 si riportano le distribuzioni di probabilità che l’elettrone
giunga in una determinata posizione dello schermo, considerate come funzioni
di x, per i casi in cui l’esperimento venga condotto:
• (a) con entrambi i fori aperti
• (b) con solo il foro 1 aperto −→ P1
• (c) con solo il foro 2 aperto −→ P2
Inoltre è rappresentata anche la distribuzione che si ottiene addizionando P1
e P2 per ogni valore di x (d).
Come si può notare, i dati sono in netto disaccordo con le implicazioni
ottenute dalla precedente ipotesi, pertanto siamo costretti a concludere che
questa sia falsa. Quindi quando entrambi i fori vengono lasciati aperti non
è corretto affermare che l’elettrone passi attraverso uno o l’altro foro. Senza
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
7
Figura 1.2: Risultati dell’esperimento per i quattro casi.
dilungarci ricordiamo, per completezza del discorso, che furono tanti i tentativi di spiegare "classicamente" quale potesse essere la traiettoria seguita
dall’elettrone che giustificasse la distribuzione ottenuta sperimentalmente:
nessuno ha avuto successo.
In particolare l’andamento mostrato in Figura 1.2 ricorda una figura di interferenza, tipica dei fenomeni ondulatori. Dovremmo quindi asserire che le
possibilità di diversi risultati per un dato esperimento interferiscono sempre?
Ricordiamo che, secondo la teoria classica, la probabilità che si verifichi almeno uno tra più eventi possibili - mutuamente esclusivi - considerati come
"successi", è la somma delle probabilità di realizzazione di ognuno di essi.
Effettivamente una simile prescrizione in alcuni casi appare necessaria e quasi
ovvia. Supponiamo, per esempio, che nell’esperimento delle due fenditure ci
venga chiesto di determinare la probabilità che un elettrone arrivi a distanza
±1cm dal centro dello schermo. Tralasciando il fatto che non siamo ancora in grado di calcolare le probabilità, possiamo comunque usare i risultati
dell’esperimento per rispondere a questa domanda. Abbiamo ottenuto una
curva che fornisce la probabilità che l’elettrone arrivi ad una distanza x dal
punto zero sullo schermo,
quindi la probabilità che esso arrivi a ±1cm dal
R1
centro deve essere −1 P (x)dx. Sperimentalmente questo ovvio risultato è
confermato e quindi concludiamo che, in questo caso, le probabilità si sommano "classicamente", ovvero non si osserva interferenza.
Tornando alla discussione dell’esperimento, possiamo tentare di verificare se
la conclusione a cui siamo giunti, e cioè che non si può dire che l’elettrone passi attraverso l’uno o l’altro foro, sia giusta. A tal fine si pensi di posizionare
un rivelatore in corrispondenza di uno dei due fori: dalla localizzazione della
luce diffusa possiamo dedurre attraverso quale apertura l’elettrone transiti.
Ripetiamo allora l’esperimento con il rivelatore e notiamo che ogni volta che
il contatore sullo schermo B registra l’arrivo di un elettrone, questo viene
rivelato in prossimità del foro 1 o 2. Quindi siamo capaci di dividere le particelle che impattano in B in due classi distinte - quelle passate attraverso 1 o
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
8
2 - e poichè conosciamo le distribuzioni di probabilità nel caso in cui uno dei
due fori venga mantenuto chiuso, dobbiamo trovare per la probabilità totale
P = P1 + P2 . Effettivamente questo è il risultato che otteniamo anche sperimentalmente nel caso in cui il rilevatore venga tenuto in funzione. Allora
sembrerebbe che fossimo arrivati ad un paradosso - ed effettivamente è così
a meno che non postuliamo qualcosa che giustifichi questo strano comportamento - e cioè che osservando gli elettroni modifichiamo drasticamente la
probabilità che questi arrivino in x.
Notiamo però che osservare l’elettrone vuol dire interagire con esso mediante
lo scambio di un fotone e che, per ridurre l’intensità di tale interazione al
fine di disturbare il meno possibile il processo, sarebbe necessario considerare radiazione elettromagnetica con lunghezza d’onda λ molto grande (poichè
p = ~/λ), ma questo non può essere fatto indiscriminatamente perchè una
sorgente luminosa non può essere localizzata nello spazio con una precisione
migliore di λ. Aumentando molto λ non saremmo più capaci di affermare
attraverso quale foro sia passato l’elettrone.
Quindi o localizziamo l’elettrone o osserviamo la figura di interferenza. Il
principio di indeterminazione può essere enunciato proprio in questi termini:
Principio di Indeterminazione: ogni tentativo di determinare quale alternativa sia stata effettivamente presa da un processo capace di seguire più
di un’alternativa distrugge inevitabilmente l’interferenza fra le alternative.
Si può mostrare con un esperimento concettuale [2, pp.10-13] che affinchè
valga il principio di indeterminazione così formulato deve valere
δx δp ≥
~
2
(1.1)
che rappresenta la forma tradizionale in cui il principio fu enunciato per la
prima volta da Heisenberg.
Da queste osservazioni all’apparenza contraddittorie è possibile trarre delle
conclusioni (i postulati di Feynman) che formino uno schema logico coerente
capace di giustificare i risultati sperimentali.
1.1.2
Gli assiomi di Feynman
Consideriamo un evento in natura, dove per evento intendiamo un particolare
processo caratterizzato da una situazione iniziale e una finale (ad esempio il
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
9
moto di una particella da un punto A ad un altro B dello spazio-tempo).
Assumiamo che:
1. ogni evento può realizzarsi seguendo più alternative, dove per alternativa si intende un modo di realizzazione del processo in cui siano
conosciute tutte le variabili dinamiche del sistema in questione (ad
esempio per il moto della particella quale traiettoria spazio-temporale
si sia verificata).
2. Le alternative si distinguono in esclusive e interferenti : le prime rappresentano quelle di cui si può capire, una volta terminato il processo,
quale sia stata effettivamente seguita dall’evento; le seconde, al contrario, quelle per le quali risulta impossibile determinare quale si sia
verificata.
3. ad ogni alternativa è possibile associare un numero complesso φ detto
ampiezza di probabilità o semplicemente ampiezza. (La forma esplicita
di φ verrà data in seguito richiedendo che la teoria si riduca a quella
classica nel limite ~ → 0.)
4. Per calcolare la probabilità che si verifichi un dato processo si deve:
sommare tutte le possibili ampiezze corrispondenti ad alternative interferenti ottenendo così l’ampiezza totale, calcolarne il modulo quadro,
e poi sommare su tutte le probabilità esclusive così ottenute.
5. ogni tentativo di determinare quale alternativa sia effettivamente scelta da un processo capace di seguire più di un’alternativa, distrugge
inevitabilmente l’interferenza fra le alternative. (Principio di Indeterminazione)
Osservazioni
Già a questo livello possiamo sottolineare alcune sostanziali differenze tra
l’approccio canonico e uno puramente alla Feynman. Infatti sulla base dei
dati relativi ad un esperimento analogo a quello descritto precedentemente,
la comunità scientifica concluse che non avesse senso cercare di definire una
traiettoria seguita dall’elettrone e che fosse possibile solo definire una probabilità che questo si trovasse in una certa posizione x ad un istante t. Da
questa conclusione e da semplici ragionamenti cinematici si deduce subito che
non si può conoscere simultaneamente e con infinita precisione i valori della
posizione x e del momento p della particella. Questa affermazione, che rappresenta il contenuto del Principio di Indeterminazione di Heisemberg nella
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
10
sua forma tradizionale, vuol dire, usando il formalismo canonico, postulare
che [x, p] = i~.
La strada che si tenterà di seguire nel presente lavoro di tesi è quella proposta
da Feynman che si basa sul postulare che la situazione è come se l’elettrone
percorresse tutte le possibili traiettorie spazio-temporali. Mostreremo come la
probabilità che la particella giunga in una posizione x al tempo t sia calcolabile associando ad ogni traiettoria un’ampiezza di probabilità e ammettendo
che ognuna di esse contribuisca a formare l’ampiezza totale. In questo senso
è possibile dire che l’elettrone percorre tutte le possibili traiettorie, e cioè
che calcolando le ampiezze in questo modo si ottengono risultati corretti,
non che la particella le percorra realmente. Questa sottile differenza è contenuta esplicitamente nel nostro formalismo: poichè il dominio delle possibili
traiettorie tra due punti fissi forma un continuo, l’ampiezza (e quindi la probabilità) associata ad ogni percorso è infinitesima, cioè la probabilità che
l’elettrone segua una traiettoria determinata è nulla. Quindi anche nella
rappresentazione di Feynman, come deve essere, la traiettoria non rappresenta un osservabile, ovvero vale il Principio di Indeterminazione nella sua
forma canonica.
Nell’enunciare i postulati non abbiamo specificato nel dettaglio cosa si intende con "processo" per generalità, limitandoci a considerare la propagazione
di una particella da un punto all’altro dello spazio-tempo come esempio.
In realtà tale generalità è superflua e potremmo dire che un processo è la
propagazione di una particella tra due punti fissati e un’alternativa è una
particolare legge oraria che li connetta. Tutta la meccanica infatti può essere
scritta in termini di q e t o, equivalentemente detto, la conoscenza della legge
oraria di un sistema ne caratterizza ogni quantità dinamica. Sottolineamo
che con questo non si intende affermare che non sia possibile misurare direttamente energie momenti ecc, ma che questi, almeno in linea teorica, possano
sempre essere determinati attraverso misure di spazio e tempo e quindi una
teoria che riesca a trattare efficacemente queste quantità costituisce, almeno
formalmente, una descrizione esauriente di tutti i fenomeni. Nonostante non
sia un’osservazione fondamentale ai fini dello sviluppo della formulazione di
Feynman, ci sembra importante tenere a mente questo concetto.
Inoltre è interessante notare come l’equazione per la dinamica della particella, nel nostro caso la forma dell’ampiezza totale detta anche propagatore,
non venga postulata ma, a differenza di quanto avviene per l’equazione di
Schrödinger nella formulazione canonica, sia possibile costruirla seguendo le
regole enunciate.
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
1.2
1.2.1
11
Costruzione dell’integrale sui cammini
Path integral come somma sulle possibili alternative
A questo punto siamo in grado di costruire il path integral, lo strumento matematico che ci permetterà di calcolare l’ampiezza totale del processo K(b, a)
chiamata anche propagatore o kernel del problema assegnato.
Da questo momento in poi adotteremo la convenzione di Feynman secondo
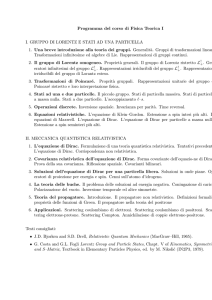
cui i punti iniziale e finale del moto verranno indicati con xa e xb , quelli intermedi come xc , xd , xe secondo la convenzione mostrata in Figura 1.3. Per lo
sviluppo del path integral sarà essenziale il concetto che abbiamo enunciato
attraverso le "regole di Feynman", ovvero che l’ampiezza di un processo è
la somma delle ampiezze relative ai vari modi alternativi in cui questo può
realizzarsi.
Figura 1.3: Schema dell’esperimento con più schermi intermedi. Ora si presentano più alternative per il moto dell’elettrone da A a B. Bisogna tenere conto del contributo che ogni cammino apporta all’ampiezza totale del
processo.
Nel considerare l’esperimento delle due fenditure, definiamo due numeri complessi φ1 e φ2 che rappresentino le ampiezze che la particella giunga in xb
partendo da xa , passando rispettivamente attraverso il foro 1 e il foro 2. Ovviamente non esiste un solo moto che congiunge xa e xb passando per 1 (lo
stesso vale per 2). Dovremo quindi sommare su tutti i possibili moti tra xa e
1 e poi tra 1 e xb (similmente per 2). Quest’idea è illustrata più chiaramente
se si considera un esperimento simile al precedente ma con più schermi intermedi indicati con le lettere C, D, E (i relativi fori su questi piani saranno
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
12
indicati con ci , di , ei ) che oltre a chiarire il concetto ci fornirà una maniera
operativa per calcolare l’ampiezza totale del processo.
In riferimento alla Figura 1.3, notiamo infatti che la particella per spostarsi
da xa a xb potrebbe andare prima attraverso e1 poi d3 e quindi attraverso
c1 oppure e1 , d2 , c3 ecc. E’ evidente quindi che bisognerebbe considerare
tutti i possibili moti che congiungono xa e xb e sommare su tutte le possibili
alternative. Indichiamo con φi l’ampiezza associata al moto ottenuto da una
possibile combinazione di punti intermedi ei , di , ci . L’ampiezza totale avrà
la forma:
X
K(a, b) ∝
φi
(1.2)
i
dove la somma su i è estesa a tutti i possibili moti che congiungono i punti
iniziale e finale, passanti per i fori praticati nei piani intermedi.
Se ora continuassimo a perforare sempre più gli schermi fino al punto in cui
questi non esistessero più, la traiettoria dell’elettrone andrebbe specificata
indicando a che altezza xE passa per lo "schermo" (che ora è stato rimosso)
posto in yE e così via, cioè l’unica modifica da apportare a (1.2) sarebbe
sostituire la somma con un integrale.
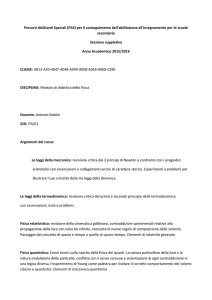
Figura 1.4: Praticando sempre più fori negli schermi E e D possiamo immaginare che alla fine questi scompaiano. Così l’elettrone ha un range continuo
di posizioni accessibili in corrispondenza degli "schermi" in E e D.
A questo punto saremmo arrivati ad una stima migliore dell’ampiezza totale perchè avremmo considerato sempre più percorsi. Ovviamente l’ultima
cosa da fare sarebbe posizionare sempre più schermi intermedi in modo da
calcolare anche tutti i possibili contributi tra un piano e l’altro. Una simile
costruzione presenta il problema che sia l’insieme dei possibili cammini congiungenti due "schermi" infinitamente vicini, sia l’insieme degli "schermi",
formerebbero un continuo e sarebbe difficile definire formalmente un oggetto
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
13
matematico del genere. In più nella nostra descrizione stiamo omettendo
un’importante specifica del moto: potremmo descrivere non solo la traiettoria x(y) seguita dall’elettrone ma specificare anche a che istante di tempo t
esso passa per ogni suo punto. Per calcolare l’ampiezza totale, integriamo
allora su ogni possibile cammino spazio-temporale che congiunga xa e xb .
Detto ciò possiamo finalmente abbandonare il riferimento all’esperimento
delle due fenditure perchè siamo riusciti a definire il concetto di ampiezza
di probabilità che una particella si sposti tra due punti dello spazio libero,
senza riferimenti a schermi arbitrari.
Figura 1.5: Time slicing e costruzione della traiettoria spazio-temporale
tra a e b come spezzata nel piano
(x,t).
Consideriamo invece, con riferimento alla Figura 1.5, due punti fissati dello
spazio-tempo a = (xa , ta ) e b = (xb , tb ) e tentiamo di costruire una somma
su tutti i possibili cammini che li congiungono delle ampiezze di probabilità
relative a ciascun cammino. Senza perdita di generalità possiamo considerare il caso unidimensionale, e cioè curve nel piano (x, t). L’estensione al caso
tridimenionale, o ad un caso N-dimenionale per un sistema composto da più
corpi dove le coordinate rappresentino punti dello spazio delle configurazioni,
sarà immediata. Per definire una somma sui cammini consideriamo prima di
tutto un sottoinsieme di cammini. Per fare ciò effettuiamo una suddivisione
dell’intervallo temporale tb − ta in N intervalli ognuno di ampiezza ottenendo un insieme di tempi ti tali che N = tb − ta . Per ogni ti possiamo scegliere
un punto xi fino ad ottenere N + 1 punti (xi , ti ). Costruiamo un particolare
cammino che connetta i punti a e b collegando con linee dritte i punti intermedi così ottenuti. E’ possibile costruire un path integral integrando su tutti
i possibili valori di xi per ogni i tra 1 e N − 1. Cioè abbiamo:
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
14
N = tb − ta
= ti+1 − ti
t0 = ta
tN = tb
x0 = xa
xN = xb
e con queste definizioni l’ampiezza totale si scrive:
Z
ZZ
1
···
φ[x(t)]dx1 dx2 · · · dxN −1
K(b, a) = lim
→0 A()N
(1.3)
Si noti come nell’espressione per l’ampiezza totale non abbiamo integrato
sulle variabili x0 e xN perchè rappresentano gli estremi fissi xa e xb . Inoltre
abbiamo considerato il lim→0 e per essere certi che tale limite esista abbiamo inserito un fattore di normalizzazione della forma A−N che, in generale,
dipenderà da . Ottenere espicitamente la forma di A da principi generali
risulta molto difficile, ragion per cui la presentiamo qui senza giustificazioni,
per completezza del discorso. Tale risultato sarà dimostrato quando otterremo l’equazione di Schrödinger (Capitolo 2).
La forma corretta di A, nel caso in cui la Lagrangiana sia della forma
L = T − V (x, t) e affinchè il limite in Eq(1.3) esista, risulta essere:
A=
1.2.2
2πi~
m
1/2
(1.4)
Il limite classico
Ci proponiamo di ottenere una forma esplicita per φ[x(t)] . Come abbiamo
sottolineato anche in precedenza, la prescrizione esatta non può essere ricavata da principi generali. Tutto quello che possiamo affermare è che, essendo
φ un numero complesso, lo si possa scrivere nella forma φ = eiS[x(t)]/~ , dove S[x(t)] è un numero reale che dipende dal particolare cammino seguito
x(t) in accordo con i postulati di Feynman. Supponiamo quindi che diversi
cammini contribuiscano tutti con lo stesso modulo indipendente da x(t) (che
quindi possiamo considerare inglobato nel fattore di normalizzazione A−N )
ma con fasi differenti. La forma esplicita per la fase di φ può essere ottenuta
chiedendo che le previsioni della teoria si riducano a quelle della meccanica
classica per ~ → 0.
Si ragioni come segue: consideriamo un particolare cammino x(t) e il funzionale S[x(t)] ad esso associato. Consideriamo poi tutti i cammini ottenuti
variando di una quantità δx piccola su scala classica il cammino x(t). Nel
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
15
limite in cui ~ → 0 le fasi di ampiezze relative a cammini vicini su scala classica differirebbero molto e questi interferirebbero distruttivamente. Esiste
però un’importate eccezione a questo fenomeno di distruzione: quel cammino che rappresenta un estremale per il funzionale S[x(t)] per variazioni del
prim’ordine δx. In questo caso la fase di tutti i cammini "vicini per variazioni del prim’ordine" non cambierebbe affatto e quindi essi intereferirebbero
costruttivamente. Poichè sappiamo che per ~ → 0 deve valere la meccanica
classica, e quindi deve esistere una traiettoria ben determinata, quest’ultima
non può che essere il "caso speciale" menzionato prima, cioè l’unico cammino
tra tutti quelli possibili congiungenti a e b che interferisce costruttivamente
con i cammini infinitamente vicini.
Abbiamo scoperto quindi che la fase giusta per φ[x(t)] è un funzionale S[x(t)]
tale che δS[x̄] = 0 dove x̄ è il cammino classico. Ma sappiamo anche che la
meccanica classica può essere formulata in termini di un principio variazionale che asserisce proprio questo:
Principio di Hamilton: il moto di un punto materiale fissati i punti e
gli istanti iniziale e finale è quello che si ottiene imponendo che il funzionale
d’azione sia stazionario per variazioni del prim’ordine se calcolato lungo questo moto.
Ovvero il principio di Hamilton è esattamente la condizione che abbiamo
scoperto debba soddisfare il funzionale S[x(t)] che compare all’esponente di
φ nel limite in cui ~ → 0, cioè nel limite in cui valga la teoria classica. Pertanto la forma esplicita di S[x(t)] può essere ottenuta richiedendo che per
~ → 0 si preservi il principio dell’azione stazionaria, e risulta quindi che il
risultato giusto per φ[x(t)] è:
φ = eiS[b,a]/~
(1.5)
Dove S[b, a] è l’azione classica del sistema data da Eq.(1.7). Nella forma di S
omettiamo la dipendenza da x(t) anche se ovviamente l’integrale va calcolato
lungo un percorso specifico.
Si osservi che in questo modo il limite classico nella formulazione di Feynman
è automaticamente rispettato: l’intera teoria è stata formulata con questa
precisa condizione.
CAPITOLO 1. L’APPROCCIO DI FEYNMAN
1.2.3
16
Il path integral
Riassumendo abbiamo che: l’ampiezza di probabilità totale che una particella
materiale si sposti tra due punti dello spazio-tempo a e b è data da:
Z
ZZ
1
K(b, a) = lim
···
eiS[b,a]/~ dx1 dx2 · · · dxN −1
(1.6)
→0 A()N
dove
Z
tb
L(v, x, t)dt
S[b, a] =
(1.7)
ta
è l’Azione classica del sistema ed è un integrale di linea valutato lungo la
spezzata che collega a e b passando per i punti xi come mostrato in Fig 4.
Se L è della forma:
L(ẋ, x, t) = T (ẋ) − V (x, t)
(1.8)
allora la costante di normalizzazione A è data da Eq.(1.4). Ovviamente il
ricorso ad una spezzata arbitraria nel piano (x, t) è servito per definire operativamente (1.6), ma il concetto di path integral è indipendente da come
si sceglie il sottoinsieme di cammini su cui effettuare l’integrale, proprio come nell’ordinario integrale di Riemann il limite della somma non dipende
dalla divisione arbitraria del dominio di integrazione. Per questo motivo
concludiamo dando una definizione più generale, che sarà quella a cui faremo
riferimento nel seguito, che sia indipendente dalla suddivisione del dominio
di integrazione. Scriveremo cioè:
Z b
K(b, a) =
eiS[b,a]/~ Dx(t) .
(1.9)
a
In quest’espressione, che è la definizione corretta di path integral, tutta la
notazione esplicita in (1.6) è contenuta nel termine Dx(t).
Capitolo 2
Sviluppo dei concetti
Abbiamo introdotto tutti i concetti necessari per costruire l’impalcatura della teoria, arrivando ad enunciare i principi su cui essa si fonda (gli assiomi
di Feynman). Quello che ci resta da fare è mostrare alcuni degli sviluppi
principali e ottenere i risultati elementari più importanti. A questo scopo,
nel presente capitolo tenteremo di affrontare principalmente due argomenti:
nella prima parte svilupperemo alcune tecniche matematiche con cui trattare
i path integral. Una di queste, la riduzione di (1.9) ad un’equazione differenziale per una funzione ψ(x, t) detta funzione d’onda, sarà fondamentale
per mostrare l’analogia tra la visione di Schrödinger e quella di Feynman.
La prima si basa per l’appunto su un’equazione differenziale - nota come
equazione di Schrödinger in meccanica quantistica - che nel presente scritto
sarà ricavata senza bisogno di postulare nient’altro oltre quello esposto nel
Capitolo 1.
Poi applicheremo i metodi mostrati alla risoluzione di alcuni casi speciali che
saranno ottimi esempi per approfondire i concetti fondamentali.
2.1
2.1.1
Metodi per valutare K(b,a)
Eventi in successione
Consideriamo un istante tc ∈ [ta , tb ] . L’azione lungo un generico percorso x(t)
di estremi a = (xa , ta ) e b = (xb , tb ) che passi per il punto c = (xc = x(tc ), tc )
può essere scritta come:
S[b, a] = S[b, c] + S[c, a]
17
(2.1)
CAPITOLO 2. SVILUPPO DEI CONCETTI
18
Questa proprietà segue dalla definizione dell’azione come integrale di linea e
dal fatto che la Lagrangiana non dipende da derivate di ordine superiore al
primo. Usando la definizione del propagatore (1.9) e (2.1) possiamo scrivere
Z
b
i/~(S[b,c]+S[c,a])
e
K(b, a) =
Z
Dx(t) =
a
b
e(i/~)S[b,c] e(i/~)S[c,a] Dx(t) .
(2.2)
a
Vorremmo poter dividere il path integral tra a e b in due integrali, uno da a
a c e l’altro da c a b. Per farlo notiamo [Figura 2.1] che un generico cammino
x(t) può essere sempre diviso in due sottocammini, uno tra xa e xc = x(tc ) e
l’altro tra xc e xb . A questo punto integrare su tutti i possibili cammini tra
xa e xb equivale a integrare su tutti quelli che vadano da xa a xc , quindi su
quelli tra xc e xb , e infine su tutti i possibili valori di xc . Quindi possiamo
scrivere
Z ∞ Z xc Z xb
e(i/~)S[c,a] e(i/~)S[b,c] dx dy dxc
(2.3)
K(b, a) =
−∞
xa
xc
dove x varia tra xa e xc , mentre y tra xc e xb .
Figura 2.1: Divisione di un
generico cammino tra a e b
in tutti i possibili sottocammini passanti per xc . Per
ottenere il propagatore del
processo dobbiamo integrare su tutti i cammini tra xa
e xc , su tutti quelli tra xc e
xb , e poi integrare su tutti
i valori di xc .
Ora i due integrali sono indipendenti e possono essere valutati separatamente.
Così otteniamo
Z ∞
K(b, a) =
K(b, c)K(c, a) dxc .
(2.4)
−∞
In base a questo importante risultato possiamo enunciare due regole.
CAPITOLO 2. SVILUPPO DEI CONCETTI
19
1. L’ampiezza totale di andare da a a c e poi a b è il prodotto del
propagatore tra a e c e quello tra c e b.
2. Il propagatore tra a e b è la somma, su tutti i possibili valori di xc ,
dell’ampiezza totale di andare da a a b passando per c.
Ovviamente possiamo considerare più divisioni per ogni cammino. In questo
caso l’ovvia generalizzazione di (2.4) sarebbe
Z
Z Z
K(b, a) =
···
K(b, N −1)K(N −1, N −2) · · · K(1, a) dx1 dx2 · · · dxN −1 .
xN −1
x2
x1
(2.5)
Senza perdita di generalità possiamo immaginare che la divisione sia stata
effettuata considerando intervalli temporali uguali tutti equidistanziati di una
quantità analogamente a quanto fatto nel Capitolo 1 (Fig.4). In questo caso
il propagatore tra due punti separati da un intervallo di tempo infinitesimo
si scrive
i
1
(2.6)
K(i + 1, i) = exp L(q̇, q, τ )
A
~
dove abbiamo introdotto le coordinate, le velocità e i tempi discretizzati che
sono rispettivamente
xi+1 − xi
xi+1 + xi
qi =
2
ti+1 + ti
.
τ=
2
q̇i =
In questo modo possiamo immaginare di dividere un generico cammino x(t)
in infiniti cammini tutti di durata temporale . L’ampiezza di probabilità φ
associata si scrive allora:
φ[x(t)] = lim
→0
N
−1
Y
K(i + 1, i) .
(2.7)
i=0
Applicando ora il principio di sovrapposizione, e cioè che le ampiezze relative
ad alternative disgunte si sommano, otteniamo
Z
Z Z NY
−1
K(b, a) = lim
···
K(i + 1, i) dx1 dx2 · · · dxN −1
(2.8)
→0
xN −1
x2
x1 i=0
che rappresenta una definizione alternativa per il propagatore del tutto equivalente a (1.3). Notiamo che in (2.8) non compare il fattore di normalizzazione 1/A perchè è incluso nella definizione del propagatore infinitesimo
CAPITOLO 2. SVILUPPO DEI CONCETTI
20
K(i + 1, i) data da (2.6).
In un’estensione relativistica della teoria risulta che non è sempre possibile
esprimere l’ampiezza per un dato cammino come φ = e(i/~)S . La (2.7) invece
continua a valere perchè è una definizione data in termini dei propagatori
infinitesimi senza esplicitare che forma debba avere φ.
2.1.2
Integrali gaussiani
Presentiamo ora un metodo molto efficace per trattare quei path integral il
cui argomento sia un esponenziale di un polinomio del secondo ordine nelle
variabili (x, ẋ). Chiameremo questo tipo di integrali, che sono tra i più
semplici da valutare, integrali gaussiani.
In meccanica quantistica questa circostanza si verifica quando S[x(t)] ha una
dipendenza dal cammino al più quadratica, ovvero se la Lagrangiana ha la
forma:
L(ẋ, x, t) = a(t)ẋ2 + b(t)ẋx + c(t)x2 + d(t)ẋ + e(t)x + f (t) .
Vogliamo calcolare il propagatore per questo sistema, cioè:
Z tb
Z b
i
L(ẋ, x, t) Dx(t) .
exp
K(b, a) =
~ ta
a
(2.9)
(2.10)
Sicuramente un modo per calcolarlo sarebbe quello di usare la definizione
(1.3); i calcoli che risulterebbero non sarebbero eccessivamente elaborati dato che l’esponenziale contiene al più termini quadratici.
Mostriamo invece come ottenere gran parte dei risultati di interesse senza
fare alcun calcolo. A questo scopo ragioniamo come segue:
denominiamo con x̄(t) il cammino classico tra i due estremi fissati. Un
generico cammino possiamo sempre rappresentarlo come:
x(t) = x̄(t) + y(t)
(2.11)
dove y(t) rappresenta la deviazione dal cammino classico.
Ad ogni t le variabili x e y differiscono di una costante diversa per ogni t,
cioè x̄(t); quindi vale dxi = dyi per ogni ti fissato. Pertanto concludiamo che
Dx(t) = Dy(t).
Possiamo scrivere per l’integrale d’azione
Z tb
˙ + ẏ 2 ) + · · · ] dt .
S[x(t)] = S[x̄(t) + y(t)] =
[a(t)(x̄˙ 2 + 2x̄y
(2.12)
ta
CAPITOLO 2. SVILUPPO DEI CONCETTI
21
Figura 2.2: La differenza tra il
cammino classico x̄(t) e un generico cammino x(t) è la funzione y(t). Dal momento che
tutti i cammini devono passare per i punti iniziale e finale,
y(ta ) = y(tb ) = 0.
Ora raggruppiamo da una parte tutti i termini che contengono x̄, da un’altra quelli lineari in y e per ultimo quelli quadratici in y. Svolgendo un’integrazione per parti nell’integrale che contiene y linearmente, si può mostrare che questo si annulla. Tale circostanza è sempre vera per deviazioni dal cammino classico piccole. Infatti x̄(t) è esattamente quel cammino
per cui variazioni piccole del prim’ordine non cambiano l’integrale d’azione
se valutato lungo questo percorso. Per una Lagrangiana quadratica questa proprietà risulta vera per deviazioni del prim’ordine comunque grandi
(ciò si verifica perchè per una funzione quadratica f (x) tutti i termini dello
sviluppo superiori al secondo sono identicamente nulli e quindi la scrittura
f (x0 + x) = f (x0 ) + f 0 (x0 )x + f 00 (x0 )x2 /2 è valida ∀x).
Indicando con Scl l’azione classica, cioè quella valutata lungo x̄(t), otteniamo
quindi
Z
tb
[a(t)ẏ 2 + b(t)ẏy + c(t)y 2 ] dt .
S[x(t)] = Scl +
(2.13)
ta
Ora poichè Scl è un numero che dipende solo dai punti fissi a e b, può essere
trattato come una costante nell’integrale sui cammini. In questo modo la
dipendenza dal cammino rimane solo tramite le fluttuazioni dalla traiettoria
classica che ovviamente sono zero nei due punti terminali poichè tutti i cammini su cui valutiamo il path integral passano per questi punti. Quindi gli
estremi di integrazione nell’integrale di cammino in Dy(t) sono entrambi 0.
CAPITOLO 2. SVILUPPO DEI CONCETTI
22
Pertanto il propagatore si può scrivere:
Z tb
Z 0
i
(i/~)Scl [b,a]
2
2
exp
K(b, a) = e
[a(t)ẏ + b(t)ẏy + c(t)y ] dt Dy(t) .
~ ta
0
(2.14)
Ora poichè tutti i cammini y(t) iniziano e terminano nel punto y = 0, l’integrale lungo questi percorsi che compare in (2.14) è una funzione solo degli
istanti iniziale e finale. Da quest’osservazione segue che (2.14) può essere
riscritta
K(b, a) = e(i/~)Scl [b,a] F (tb , ta )
(2.15)
che rappresenta la soluzione più generale per il propagatore di un sistema descritto da una Lagrangiana del tipo di (2.9). In particolare notiamo
che la dipendenza dalle variabili spaziali per un integrale gaussiano risulta
completamente determinata.
2.1.3
Equazione differenziale per ψ.
Schrödinger
Formulazione di
Anzichè chiedersi quale sia la probabilità che una particella arrivi in un punto
(x, t) partendo da un punto (x0 , t0 ) e calcolare l’ampiezza associata "seguendo attentamente" il moto tra i due punti, potremmo domandarci quale sia
l’ampiezza di probabilità ψ(x, t) che la particella si trovi in x all’istante t senza interrogarci su come ci sia arrivata. Quest’ampiezza ψ è detta funzione
d’onda e viene definita in maniera analoga al propagatore K(b, a) : la probabilità di incontrare la particella in (x, t) è data da |ψ(x, t)|2 , dove ψ è una
funzione complessa nelle variabili x e t. Quindi la notazione K(xb , tb ; xa , ta )
è equivalente a ψ(xb , tb ) solo che fornisce più informazioni. In un certo senso
possiamo concludere quindi che
K(xb , tb ; xa , ta ) = ψ(xb , tb )
(2.16)
dove non ci preoccupiamo della dipendenza di K da (xa , ta ).
Essendo ψ un’ampiezza di probabilità, soddisfa tutte le proprietà che abbiamo ricavato per K, in particolare vale la regola di composizione delle
ampiezze per eventi in successione che possiamo scrivere nel seguente modo:
Z ∞
ψ(xb , tb ) =
K(xb , tb ; xc , tc ) ψ(xc , tc ) dxc
(2.17)
−∞
Quest’equazione integrale per ψ ha un importante senso fisico che inoltre
specifica meglio cosa "siano" K e ψ:
l’ampiezza totale di trovarsi in (xb , tb ) - cioè ψ(xb , tb ) - è la somma (integrale)
CAPITOLO 2. SVILUPPO DEI CONCETTI
23
su tutti i possibili valori di xc dell’ampiezza totale di essere in (xc , tc ) - cioè
ψ(xc , tc ) - moltiplicata per l’ampiezza di andare da c a b [K(xb , tb ; xa , ta )].
Per questo motivo K è chiamato "propagatore".
E’ importante notare come il propagatore per un dato sistema non dipenda
in alcun modo dalle condizioni iniziali ma esclusivamente dalla forma della
funzione di Lagrange. Dalla (2.17) vediamo che è possibile riassumere tutti
gli effetti della storia passata del sistema in termini di un’unica funzione
d’onda valutata ad un istante iniziale [ψ(xc , tc )] . L’equazione (2.17) più che
la (2.16) definisce la funzione ψ.
In particolare nel ricavare (2.17) abbiamo fatto uso di (2.4) che a sua volta
valeva nell’ipotesi in cui
S[b, a] = S[b, c] + S[c, a]
(2.18)
In quest’ipotesi è possibile formulare un’equazione differenziale per ψ. Fondamentalmente questo è reso possibile dal fatto che (2.1) risulta verificata
anche nel caso in cui tb differisca di una quantità infinitesima rispetto a
tc , e ciò ci permette di legare il valore del path integral ad un certo istante
a quello valutato ad un tempo immediatamente successivo. Nel caso in cui
tb = ta + possiamo scrivere infatti:
xb = x
xa = y
Z
ψ(x, t + ) =
tb = t + ta = t
∞
K(x, t + ; y, t) ψ(y, t) dy
−∞
e usando la stessa approssimazione usata per (2.6) abbiamo che
Z
i
x − y x + y (t + ) + t
1 ∞
exp
L
,
,
ψ(y, t) dy .
ψ(x, t + ) =
A −∞
~
2
2
(2.19)
Applichiamo questa relazione al caso di una particella che si muova in un
potenziale V (x, t), cioè quando la Lagrangiana sia della forma L = (m/2)ẋ2 −
V (x, t). In questo caso l’equazione precedente si scrive
1
ψ(x, t + ) =
A
i m(x − y)2
exp
~
2
−∞
i
x+y
× exp − V
,t
ψ(y, t) dy
~
2
Z
∞
. (2.20)
L’argomento dell’integrale è il prodotto di due fattori oscillanti e, considerando che è supposta essere una quantità molto piccola, notiamo che il primo
CAPITOLO 2. SVILUPPO DEI CONCETTI
24
oscilla con frequenza molto maggiore del secondo. Questo è vero sopratutto
nelle regioni in cui y è considerevolmente differente da x: per questi valori
l’argomento del primo esponenziale [(x − y)2 /] varia molto al variare di y e
conseguentemente l’esponenziale oscilla molto rapidamente. In questo caso
l’integrale in dy restituisce un valore piccolo perchè si verifica interferenza
distruttiva. Sulla base di queste considerazioni possiamo effettuare la sostituzione y = x + η aspettandoci che il contributo sostanziale all’integrale si
abbia solo per piccoli valori di η. Otteniamo quindi
1
ψ(x, t + ) =
A
∞
imη 2
exp
2~
−∞
η
i
ψ(x + η, t) dη
× exp − V x + , t
~
2
Z
. (2.21)
Ora sviluppiamo ψ(x, t + ) in serie di potenze arrestandoci al prim’ordine
in . Poichè la fase
p del primo esponenziale varia da 0 a 1 radianti quando
η varia tra 0 e 2~/m, e il maggior contributo si avrà proprio per η di
quest’ordine, arrestarsi al prim’ordine in vuol dire tenere termini in η fino al
secondo ordine. Nello sviluppo il termine V (x + η/2, t) può essere sostituito
con V (x, t) in quanto l’errore commesso è di ordine superiore a . Così
otteniamo:
Z
imη 2
∂ψ
1 ∞
exp
ψ(x, t) + =
∂t
A −∞
2~
∂ψ η 2 ∂ 2 ψ
i
+
× 1 − V (x, t) ψ(x, t) + η
dη . (2.22)
~
∂x
2 ∂x2
Consideriamo il primo termine da entrambi i lati dell’uguaglianza: a sinistra
abbiamo solo ψ(x, t), a destra lo stesso termine però moltiplicato per
1
A
Z
∞
exp
−∞
imη 2
2~
1/2
1 2πi~
dη =
A
m
.
(2.23)
Affinchè esista il limite per → 0 la costante A deve essere scelta in modo
che la precedente espressione valga 1, quindi otteniamo
A=
2πi~
m
1/2
(2.24)
che è il risultato che avevamo enunciato senza dimostrazione nel paragrafo
1.3.1 [Eq(1.4)].
CAPITOLO 2. SVILUPPO DEI CONCETTI
25
Per valutare gli integrali che compaiono nel membro di destra risultano utili
i seguenti risultati:
Z
1 ∞
imη 2
η exp
dη = 0
(2.25)
A −∞
2~
Z
imη 2
i~
1 ∞ 2
η exp
dη =
.
(2.26)
A −∞
2~
m
Svolgendo semplici calcoli otteniamo infine
ψ+
∂ψ
i
i~ ∂ 2 ψ
=ψ− Vψ+
∂t
~
2m ∂x2
(2.27)
che risulta verificata all’ordine se ψ soddisfa la seguente equazione differenziale alle derivate parziali:
i~
~2 ∂ 2 ψ
∂ψ
=−
+Vψ
∂t
2m ∂x2
.
(2.28)
L’equazione (2.28) è detta equazione di Schrödinger e costituisce il fulcro
della formulazione tradizionale della meccanica quantistica. Essa permette,
una volta specificato il valore della funzione d’onda ad un istante iniziale
t0 , di calcolare ψ(t) per ogni t; ovvero regola la dinamica quantistica della
funzione di stato ψ.
In particolare abbiamo ottenuto (2.28) nel caso in cui L sia della forma
L=
m 2
ẋ − V (x, t) .
2
(2.29)
In generale risulta che per qualsiasi tipo di funzione di Lagrange sia possibile
scrivere un’equazione analoga a (2.28) e che tutte possano essere poste nella
forma
∂ψ
i~
= Hψ
(2.30)
∂t
dove ora H non rappresenta un numero ma un operatore, chiamato operatore Hamiltoniano in MQ. Nel caso in cui L sia data da Eq.(2.29), e quindi
l’equazione sia (2.28), l’operatore H è
H=−
~2 ∂ 2
+ V (x, t) .
2m ∂x2
(2.31)
La formulazione operatoriale è largamente usata perchè comporta notevoli
semplificazioni formali.
CAPITOLO 2. SVILUPPO DEI CONCETTI
26
Dall’equazione (2.28) è possibile derivare con grande semplicità i concetti
della meccanica ondulatoria (nome con cui era conosciuta la teoria nei primi
anni dalla sua formulazione) come l’equazione di continuità per la probabilità
e le formule per il calcolo dei valori medi di x e p.
Non dimostreremo tutti questi importantissimi risultati perchè ciò esulerebbe
dallo scopo del presente lavoro di tesi. Piuttosto notiamo che avendo derivato
dai principi enunciati nel primo capitolo l’equazione (2.28), automaticamente
abbiamo provato tutti i risultati che ne conseguono. In questo senso possiamo
affermare che la formulazione di Schrödinger possa essere ricavata da quella
di Feynman.
Elenchiamo invece, senza dimostrazione, alcune caratteristiche di una certa
classe di soluzioni dell’equazione di Schrödinger che ci serviranno per ottenere
un importante risultato per il propagatore.
Consideriamo il caso importante in cui H non dipenda dal tempo. Questo
corrisponde ad un’azione S in cui il tempo non compare esplicitamente. Molti
importanti sistemi fisici hanno questa caratteristica, e cioè essi non scambiano
energia con l’esterno. Questi sistemi sono detti isolati.
Studiando l’equazione di Schrödinger in questo caso è facile vedere che la più
generale funzione d’onda soluzione del problema si scrive
X
cn φn (x)e−(i/~)En t
(2.32)
ψ(x, t) =
n
dove le funzioni φn sono tutte le possibili soluzioni della seguente equazione
alle derivate parziali
Hφn (x) = En φn
(2.33)
detta equazione di Schrödinger per gli stati stazionari. Infatti ogni funzione
φn che soddisfa Eq.(2.33) oscilla con una frequenza ben determinata. Ciò
si vede notando che la costante En che compare in (2.33) è la stessa che si
trova all’esponente nell’equazione precedente. In particolare l’equazione agli
stati stazionari è un’equazione agli autovalori che ammette soluzioni solo per
alcuni valori di En . Questi valori sono legati alle frequenze caratteristiche
del sistema secondo la nota formula E = ~ω. Per questo motivo diciamo che
quando lo stato è descritto da una funzione d’onda φn che soddisfi (2.33) esso
ha un’energia En ben definita. Le funzioni di questo tipo sono dette autostati
del sistema.
Inoltre dal Teorema di Sturm-Liouville sappiamo che le funzioni φn formano
una base ortonormale dello spazio delle possibili soluzioni di Eq.(2.28), ovvero
che vale
Z ∞
φ∗n (x)φm (x) dx = δn,m
δn,m delta di Kronecker
(2.34)
−∞
CAPITOLO 2. SVILUPPO DEI CONCETTI
27
e che una generica funzione f (x) appartenente a tale spazio può essere sempre
espressa nella forma
X
f (x) =
an φn (x)
(2.35)
n
dove i coefficienti an sono dati da
Z ∞
φ∗n (x)f (x) dx .
an =
(2.36)
−∞
Dalle ultime due equazioni si ottiene la seguente importantissima relazione
detta decomposizione dell’identità
X
φn (x)φ∗n (y) = δ(x − y)
(2.37)
n
dove δ(x − y) è la delta di Dirac.
Per ottenere i coefficienti cn che compaiono in (2.32) dobbiamo specificare la
condizione iniziale, cioè assegnare ψ(x, ta ). Questa sarà una generica funzione
f (x) che possiamo sempre scrivere come combinazione lineare delle φn , ovvero
X
X
an φn (x) .
(2.38)
cn φn (x)e−(i/~)En ta =
f (x) = ψ(x, ta ) =
n
n
Da questa relazione otteniamo
cn = an e+(i/~)En ta
.
(2.39)
Inserendo questo risultato in (2.32) e sostituendo per an la sua espressione
in termini di f (x) e φ(x), cioè Eq.(2.36), possiamo infine scrivere
Z ∞X
φn (x)φ∗n (y)e−(i/~)En (tb −ta ) f (y) dy .
(2.40)
ψ(x, tb ) =
−∞
n
Quest’ultima espressione determina completamente la funzione d’onda al
tempo tb in termini del suo valore ad un istante iniziale ta una volta noto
l’operatore H e risolta l’Eq.(2.33). Precedentemente avevamo trovato questa
relazione sotto un’altra forma, e cioè quella data da Eq.(2.17), che riportiamo
di seguito:
Z
∞
ψ(x, tb ) =
K(x, tb ; y, ta ) f (y) dy
.
(2.41)
−∞
Paragonando le ultime due equazioni, e ponendo K(b, a) = 0 per tb < ta ,
otteniamo finalmente l’espressione che cercavamo per il propagatore K :
(P
∗
−(i/~)En (tb −ta )
per tb > ta
n φn (xb )φn (xa )e
K(xb , tb ; xa , ta ) =
0
per tb < ta
(2.42)
CAPITOLO 2. SVILUPPO DEI CONCETTI
28
La precedente equazione esprime il propagatore, che è stato in origine definito
come un path integral, interamente in termini delle soluzioni di un’equazione
differenziale, per la precisione Eq.(2.33).
Affrontiamo ora il problema "dalla parte opposta": cerchiamo di ricavare
un’equazione simile a (2.28) per il propagatore che possa servire come punto
di partenza per definire K(b, a) se uno stesse partendo dalla formulazione di
Schrödinger. In più ciò che otterremo ci sarà molto utile per approfondire la
natura del propagatore trovando una forma più esplicita per K(b, a) rispetto
a quanto lo sia la sua definizione in termini di path integral [Eq.(1.3)].
L’equazione di Schrödinger per il propagatore. Poichè K(b, a), considerata come funzione della variabile b, è una funzione d’onda - in particolare
la funzione d’onda di una particella che parte da a - vediamo subito che anche
K deve soddisfare l’equazione di Schrödinger. In particolare nel caso in cui
L sia data da Eq.(2.29) l’equazione per K, per tb > ta , è
i~
~2 ∂ 2
∂
K(b, a) = −
K(b, a) + V (xb , tb )K(b, a)
∂tb
2m ∂xb 2
(2.43)
dove, ricordiamo, a = (xa , ta ) e b = (xb , tb ).
In generale si ha
i~
∂
K(b, a) = Hb K(b, a)
∂tb
per tb > ta
(2.44)
dove l’operatore Hb opera solo sulla variabile b.
Le precedenti equazioni sono valide a condizione che tb > ta . Questa limitazione può essere eliminata, ma per farlo dobbiamo indagare più a fondo su
quale sia la natura matematica del propagatore nella formulazione in termini
di ψ. Riscriviamo Eq.(2.28) nella forma
S(x,t) ψ(x, t) = 0
(2.45)
~2 ∂ 2
∂
+
− V (x, t) è un operatore differenziale. Per
∂t
2m ∂x2
la risoluzione di Eq.(2.45) è necessario specificare le condizioni al bordo e la
condizione iniziale ψ(x, t0 ) = ψ0 (x). Dalla teoria delle distribuzioni sappiamo
che è possibile inglobare quest’ultima come termine di "sorgente" in Eq(2.45).
Cioè la risoluzione del problema si riduce a trovare una soluzione debole
dell’equazione
dove S(x,t) = i~
S(x,t) ψ(x, t) = ψ(x, t0 )δ(t − t0 ) = f (x, t) .
(2.46)
CAPITOLO 2. SVILUPPO DEI CONCETTI
29
Per risolvere Eq.(2.46) supponiamo di conoscere la funzione di Green (anche detta soluzione fondamentale) associata, cioè la distribuzione che sia
soluzione di
S(x,t) G(x, t; x0 , t0 ) = δ(x − x0 )δ(t − t0 )
(2.47)
In termini della funzione di Green, la soluzione generale di (2.46) si scrive
ZZ
ψ(x, t) =
∞
G(x, t; x0 , t0 )f (x0 , t0 ) dx0 dt0 =
−∞
ZZ ∞
G(x, t; x0 , t0 )ψ(x0 , t0 )δ(t0 − t0 ) dx0 dt0 (2.48)
=
−∞
e utilizzando la proprietà della delta di Dirac
Z ∞
G(x, t; x0 , t0 )δ(t0 − t0 ) dt0 = G(x, t; x0 , t0 )
(2.49)
−∞
otteniamo
Z
∞
ψ(x, t) =
G(x, t; x0 , t0 )ψ(x0 , t0 ) dx0
.
(2.50)
−∞
Notiamo che la relazione appena ottenuta tra ψ(x, t) e la soluzione fondamentale G(x, t; x0 , t0 ) è esattamente la stessa che lega la funzione d’onda ad
un istante generico t, la funzione d’onda ad un’istante iniziale t0 , e il propagatore del sistema [Eq.(2.17)]. Deduciamo quindi che il propagatore è la
funzione di Green dell’equazione di Schrödinger. In particolare questa circostanza servirebbe come definizione di K(b, a) se uno volesse introdurlo a
partire dalla rappresentazione in termini di ψ.
2.2
2.2.1
Sistemi fisici elementari
Particella libera
Calcoliamo ora il propagatore per il semplice caso di particella libera (unidimensionale), cioè un sistema descritto dalla lagrangiana
L=
m 2
ẋ
2
(2.51)
CAPITOLO 2. SVILUPPO DEI CONCETTI
30
Questo è uno dei pochi casi in cui K può essere calcolato tramite la sua
definizione (1.6) in maniera esatta. Ci proponiamo cioè di calcolare
N/2
m
K0 (b, a) = lim
→0
2πi~
Z
Z
N
im X
2
(xi − xi−1 ) dx1 · · · dxN −1 (2.52)
× · · · exp
2~ i=1
Quest’espressione è un insieme di integrali gaussiani di cui si conosce la
soluzione esatta che è
r
Z ∞
π β 2 /4α
−αx2 +βx
e
dx =
e
.
(2.53)
α
−∞
Il modo migliore per calcolare K0 (L’indice 0 serve a ricordarci che stiamo
considerando il propagatore di una particella libera) è calcolare prima
m
2πi~
2/2 Z
∞
−∞
im
2
2
[(x2 − x1 ) + (x1 − x0 ) ] dx1 =
exp
2~
1/2
im
m
2
exp
(x2 − x0 )
(2.54)
2πi~ · 2
2~ · 2
quindi moltiplicare il risultato per
m
2πi~
1/2
im
2
exp
(x3 − x2 )
2~
(2.55)
e integrare di nuovo, questa volta rispetto a x2 . In questo modo otteniamo:
m
2πi~ · 3
1/2
im
2
exp
(x3 − x0 )
.
2~ · 3
(2.56)
Notiamo quindi che si instaura un processo ricorsivo che dopo N − 1 step
darà
1/2
m
im
2
exp
(xN − x0 )
.
(2.57)
2πi~ · N 2~ · N Dal momento che, per costruzione (si veda paragrafo 1.3.1), N = tb − ta ,
otteniamo infine
1/2
m
im(xb − xa )2
K0 =
exp
.
(2.58)
2πi~(tb − ta )
2~(tb − ta )
CAPITOLO 2. SVILUPPO DEI CONCETTI
31
Studiamo ora alcune implicazioni del propagatore K0 . Per comodità assumiamo che il punto a sia l’origine del sistema di coordinate spaziali e temporale.
Il propagatore che rappresenta l’ampiezza di trovarsi nel punto b= (x, t) è
1/2
m
imx2
.
(2.59)
K0 (x, t; 0, 0) =
exp
2πi~t
2~t
Se fissiamo la variabile t vediamo che K0 varia con la distanza√x come mostrato in Figura 2.3 (più precisamente è graficata la parte reale di iK0 (x, t; 0, 0)).
√
Figura 2.3: Andamento di Re iK0 come funzione di x, per t fissato. La
lunghezza d’onda è inversamente proporzionale al momento che una particella
classica dovrebbe avere per arrivare in un tempo t (fissato) nella posizione x.
Calcoliamo la lunghezza d’onda associata
2π =
m(x + λ)2 mx2
−
2~t
2~t
⇓
λ = −x 1 −
r
4π~t
1+
mx2
2π~t
λ ∼ −x 1 − 1 −
mx2
2π~
λ∼
m( x/t )
per x λ
Se definiamo il momento di una particella p come p = ~k dove k = 2π/λ è
detto numero d’onda, vediamo allora che questa definizione si accorda con
CAPITOLO 2. SVILUPPO DEI CONCETTI
32
Figura
Andamento di
√ 2.4:
Re iK0 come funzione di t,
per x fissato. Come si vede
le variazioni di ampiezza sono trascurabili per t grandi.
La frequenza delle oscillazioni
è proporzionale all’energia che
una particella classica dovrebbe avere per arrivare nel punto
x (fissato) entro un intervallo
di tempo t.
quella classica (p = mv) al limite di lunghezze molto più grandi della lunghezza d’onda tipica del sistema.
√
Consideriamo ora fissata la variabile x e studiamo l’andamento di Re{ iK0 }
in funzione di t [Figura 2.4]. Trascuriamo le variazioni dell’ampiezza poichè
dA(t)
∝ t−3/2 .
alla fine considereremo il limite per t grandi e
dt
Calcoliamo invece il periodo di oscillazione T , cioè il tempo necessario a
diminuire la fase di 2π
mx2
mx2
−
2~t
2~(t + T )
2
mx
T
=
2~t2 1 + T /t
2π =
⇓
2
2π .
1m x
=ω∼
T
~2 t
dove nell’ultimo passaggio abbiamo introdotto la frequenza angolare ω =
2π/T .
Definendo l’energia E associata alla particella come E = ~ω, notiamo come
questa definizione si riduca a quella classica (E = mv 2 /2) al limite di tempi
molto più grandi del periodo di oscillazione dell’onda.
CAPITOLO 2. SVILUPPO DEI CONCETTI
33
Pertanto i concetti di energia e momento sono estesi in meccanica quantistica
secondo le regole seguenti:
• se l’ampiezza varia col tempo secondo la forma e−iωt , diciamo che la
particella ha energia E = ~ω
• se l’ampiezza varia con lo spazio secondo la forma eikx , diciamo che la
particella ha momento p = ~k
Abbiamo mostrato come queste regole siano in accordo con le usuali definizioni di energia e momento nel limite classico.
2.2.2
Moto in un campo di potenziale
Affrontiamo ora il caso di un sistema descritto da un generico potenziale
V (x) per il quale cerchiamo soluzioni approssimate. Facciamo la sostituzione
x(t) = x̄(t) + y(t) dove il significato di x̄(t) e y(t) è lo stesso specificato nel
paragrafo 2.1.2 . Espandiamo V (x) in potenze di y
V (x) = V (x̄ + y) = V (x̄) + V 0 (x̄)y + V 00 (x̄)
y3
y2
+ V 000 (x̄) + · · ·
2
6
(2.60)
e supponiamo che tutti i termini di ordine y 3 e superiori siano trascurabili.
In quali situazioni fisicamente significative quest’approssimazione sia corretta verrà specificato in seguito.
Sotto quest’ipotesi la Lagrangiana assume la forma quadratica come in Eq.(2.9).
Quindi valgono i risultati trovati nel paragrafo 2.1.2 per gli integrali gaussiani,
in particolare possiamo scrivere
S ∼ Scl + S (2)
(2.61)
dove Scl = S[x̄(t)] e S (2) dipende solo da termini quadratici in y. Il propagatore è quindi
K(b, a) ∼ e(i/~)Scl [b,a] F (tb , ta )
(2.62)
dove F (tb , ta ) è un fattore "regolare" della forma
Z tb
Z 0
i
2
2
[a(t)ẏ + b(t)ẏy + c(t)y ] dt Dy(t) .
F (tb , ta ) =
exp
~ ta
0
(2.63)
Pertanto a condizione che sia lecito trascurare i termini superiori a y 2 in
Eq.(2.60), la soluzione si scrive
K(b, a) ∼ "funzione regolare" e(i/~)Scl [b,a]
.
(2.64)
CAPITOLO 2. SVILUPPO DEI CONCETTI
34
In particolare la dipendenza del propagatore dalle variabili spaziali risulta
completamente determinata.
Ci sono vari casi in cui l’approssimazione risulta corretta.
Se S ~ sappiamo che gli unici cammini che contano nel path integral sono
quelli "vicini" al cammino classico. In questo caso ha senso non considerare
termini superiori a y 2 .
Se V (x) è una funzione che cambia molto lentamente rispetto a variazioni di
x, allora è lecito considerare trascurabili le derivate di ordine superiore al secondo e quindi l’approssimazione ha senso. Questa circostanza in meccanica
quantistica è detta approssimazione WKB.
Nel caso in cui V (x) sia una funzione quadratica, allora la soluzione (2.64)
risulta esatta.
Capitolo 3
La fase di Berry
Presentiamo ora l’analisi di un problema relativamente recente seguendo un
approccio basato sul formalismo del path integral sviluppato nei capitoli precedenti. Oltre al fatto che la fase geometrica è stata usata per spiegare alcuni
importanti fenomeni osservati sperimentalmente, l’effetto Aharanov-Bohm e
l’effetto Jahn-Teller ad esempio, abbiamo scelto di concentrare la nostra attenzione su questo problema poichè esso costituisce uno dei pochi casi in cui
la formulazione in termini di integrali di cammino permette una risoluzione
più semplice ed immediata rispetto all’approccio canonico. Ciò è permesso
dal fatto che, come vedremo, la fase di Berry è una proprietà geometrica
del sistema che emerge in seguito ad una trasformazione ciclica eseguita su
di esso. Pertanto essa è strettamente legata al concetto di "traiettoria nello
spazio dei parametri" e quindi risulta più maneggevole in una trattazione in
termini di integrali di cammino.
La fase di Berry, introdotta dal fisico britannico Michael Berry, è la fase
acquistata da uno stato quantistico a seguito di una variazione adiabatica ciclica dell’Hamiltoniana descrivente la dinamica del sistema. Tale fase è anche
detta fase geometrica poiché dipende dalla geometria dello spazio degli stati
quantistici per il sistema in esame, in contrapposizione alla fase dinamica che
è acquistata da un autostato della Hamiltoniana durante la sua evoluzione
temporale, dettata dalla soluzione dell’equazione di Schrödinger.
Il termine adiabatico che compare nella definizione data è da intendersi nel
senso che la fase di Berry appare quando si considerano trasformazioni del
sistema in approssimazione adiabatica, ovvero quando valga il
Teorema Adiabatico Un sistema fisico rimane nell’autostato istantaneo in cui si trova ad un istante iniziale t0 se su di esso agisce una perturbazione sufficientemente lenta e se esiste un gap tra l’autovalore relativo
35
CAPITOLO 3. LA FASE DI BERRY
36
all’autostato iniziale e il resto dello spettro della Hamiltoniana. (Born - Fock,
1928)
Tale condizione è soddisfatta se si verifica
hψm | Ḣ |ψn i En − Em
.
(3.1)
In particolare il teorema adiabatico ci garantisce che
e−(i/~)H(ti ) |φni , ti i ∝ |φni , ti + i
.
(3.2)
Questa sarà la relazione di cui ci serviremo per ottenere il risultato finale.
Come ultima osservazione prima di procedere con i calcoli, notiamo che durante tutto il presente lavoro di tesi abbiamo lavorato esclusivamente nella
rappresentazione delle x, giustificando tale scelta con le osservazioni condotte nel primo capitolo. La notazione bra-ket si rivela però molto più potente
di quella che abbiamo adottato fin ora. In questo capitolo allora, sempre
partendo dal formalismo spazio-temporale, vedremo anche come scrivere il
path integral in uno spazio astratto, come ad esempio quello dei "cammini
dell’energia", ovvero usando la base degli autoket di H.
Il propagatore in termini dell’operatore di evoluzione temporale U (t, t0 )
Consideriamo un sistema descritto da una Hamiltoniana H che si trovi all’istante t0 in uno stato iniziale descritto dal ket |ψ0 i = |ψ(t0 )i. Ad un generico
tempo t il sistema sarà descritto da un ket |ψ(t)i dato da
|ψ(t)i = U (t, t0 ) |ψ0 i
(3.3)
dove U (t, t0 ) è detto operatore di evoluzione temporale. Nel caso in cui H
non dipenda da t allora
i
H(t−t0 )
U (t, t0 ) = e ~
−
.
(3.4)
Proiettiamo l’Eq.(3.3) sulla base delle x
ψ(x, t) ≡ hx|ψ(t)i = hx| U (t, t0 ) |ψ0 )i
(3.5)
CAPITOLO 3. LA FASE DI BERRY
e usiamo la relazione di chiusura degli autoket della posizione
1. In questo modo otteniamo
Z ∞
hx| U (t, t0 ) |x0 i hx0 |ψ0 i dx0 .
ψ(x, t) =
37
R
|xi hx| dx =
(3.6)
−∞
Confrontando quest’espressione con Eq.(2.17) otteniamo infine il risultato
cercato
K(x, t; x0 , t0 ) = hx| U (t, t0 ) |x0 i
(3.7)
3.0.1
Calcolo della fase di Berry tramite il path integral
Abbiamo visto che la fase di Berry è, per definizione, quel contributo di fase
non dinamico che acquista la funzione d’onda durante la sua evoluzione. Pertanto quello che dobbiamo fare è sempicemente calcolare ψ(x, t) in funzione
di ψ(x0 , t0 ) ed isolare il contributo di fase geometrico che apparirà.
Supponiamo che la dipendenza di H da t sia del tipo H(R(t)), e cioè che essa
non dipenda esplicitamente dal tempo ma solo attraverso le variazioni di un
parametro n-dimensionale. In più facciamo l’ipotesi che tale variazione sia
estremamente lenta a confronto dei tempi caratteristici del sistema in modo
da trovarci in approssimazione adiabatica.
Ad ogni tempo t l’operatore Hamiltoniano ammette un set completo di
autoket discreto e non degenere
H(R(t)) |φn , R(t)i = En (R(t)) |φn , R(t)i
(3.8)
hφn , R(t)|φm , R(t)i = δn,m
(3.9)
e vale
ovvero istante per istante gli autoket |φn , R(t)i formano una base completa
dello spazio.
In particolare è soddisfatta la relazione di chiusura
X
|φn , R(t)i hφn , R(t)| = 1
(3.10)
n
dove 1 è l’operatore identità. In quello che segue, per semplificare la notazione, scriveremo H(R(t)) ≡ H(t), |φn , R(t)i ≡ |φn , ti, En (R(t)) ≡ En (t).
Per calcolare ψ(x, t) dobbiamo risolvere
Z ∞
ψ(x, t) =
K(x, t; x0 , t0 ) ψ(x0 , t0 ) dx0 .
(3.11)
−∞
CAPITOLO 3. LA FASE DI BERRY
38
In questo caso usare la definizione (1.3) sarebbe complicato poichè abbiamo
ammesso che H dipenda dal tempo. Per aggirare il problema consideriamo
i propagatori infinitesimi, ovvero usiamo la relazione (2.8). Inserendola in
Eq.(3.11) otteniamo
ZZ
···
ψ(x, t) = lim
→0
Z NY
−1
K(i + 1; i) ψ0 (x0 ) dx0 · · · dxN −1
(3.12)
i=0
dove ovviamente xN ≡ x. Usiamo ora la relazione (3.7) ricavata in precedenza
per scrivere
ZZ
ψ(x, t) = lim
→0
···
Z NY
−1
hi + 1| U (ti+1 , ti ) |ii ψ0 (x0 ) dx0 · · · dxN −1
.
i=0
(3.13)
che per estesa si legge
ZZ
Z
· · · hxN | U (tN , tN −1 ) |xN −1 i hxN −1 | U (tN −1 , tN −2 ) |xN −2 i · · ·
ψ(x, t) = lim
→0
· · · hx2 | U (t2 , t1 ) |x1 i hx1 | U (t1 , t0 ) |x0 i ψ0 (x0 ) dx0 · · · dxN −1
. (3.14)
Inseriamo ripetutamente la relazione di chiusura (3.10) facendo attenzione che a meno dell’indice n0 ogni sommatoria compare due volte. Per
distinguerle le indichiamo con indici che differiscono di un apice: nN −j e
n0(N −j) j = 1, 2, · · · , N − 1.
ψ(x, t) = lim
→0
X ZZ
Z
···
hxN | U (tN , tN −1 ) |φnN −1 i
hφnN −1 |xN −1 i hxN −1 |φn0(N −1) i hφn0(N −1) | U (tN −1 , tN −2 ) |φnN −2 i
hφnN −2 |xN −2 i · · · hx1 |φn01 i hφn01 | U (t1 , t0 ) |φn0 i hφn0 |x0 i
ψ0 (x0 ) dx0 · · · dxN −1
. (3.15)
In (3.15) per semplificare la lettura abbiamo adottato le scritture sintetiche
X
X
≡
nN −1 ,n0(N −1) ...n1 ,n01 ,n0
|φnj i ≡ |φnj , tn i
In questo modo compaiono termini del tipo
Z ∞
φ∗nl (xl )φn0l (xl ) = δnl ,n0l
−∞
(3.16)
CAPITOLO 3. LA FASE DI BERRY
39
e le delta che ne risultano forzano le sommatorie in modo da dimezzare gli
indici (in pratica non sommiamo più due volte rispetto allo stesso indice). In
questo modo otteniamo
X
ψ(x, t) = lim
→0
hx| e−(i/~)H((N −1)) |φnN −1 i hφnN −1 | e−(i/~)H((N −2)) |φnN −2 i
nN −1 ,...n1 ,n0
· · · hφn1 | e
−(i/~)H(t0 )
Z
∞
hφn0 |x0 i ψ0 (x0 ) dx0
|φn0 i
. (3.17)
−∞
Se espandiamo ψ0 sulla base delle autofunzioni hx0 |φn0 i all’istante t0 , l’ultimo
integrale in dx0 restituisce
Z
∞
Z
∞
φ∗n0 (x0 )ψ0 (x0 ) dx0 =
hφn0 |x0 i ψ0 (x0 ) dx0 =
−∞
Z ∞ −∞
X
X
φ∗n0 (x0 )φm (x0 ) dx0 =
=
cm (t0 )
cm (t0 )δm,n0
−∞
m
. (3.18)
m
Così otteniamo
ψ(x, t) = lim
→0
X
m
X
cm (t0 )
hx| e−(i/~)H((N −1)) |φnN −1 i hφnN −1 | e−(i/~)H((N −2)) |φnN −2 i
nN −1 ,...n1
−(i/~)H(t0 )
· · · hφn1 | e
|φn0 i
. (3.19)
Osserviamo che la seguente equazione rappresenta l’espressione del propagatore come path integral sui "cammini dell’energia" φni (ti ). Avremmo potuto
scrivere direttamente (3.19) ma abbiamo preferito partire dalla formulazione
spazio-temporale trattata nel presente lavoro di tesi e ricavare (3.19) usando
le proprietà di completezza degli autoket dell’osservabile energia.
Il teorema adiabatico ci garantisce che valga
e−(i/~)H(ti ) |φni , ti i ∝ |φni , ti + i
(3.20)
e quindi
hφni , ti + | e−(i/~)H(ti ) |φni , ti i ∝ δni ,ni+1
.
(3.21)
In questo modo compaiono NP
−2 delta che forzano le sommatorie in modo che
nel risultato finale resti solo m . Calcolando inoltre gli elementi di matrice
hφni , ti + | e−(i/~)H(ti ) |φni , ti i, e ricordando che stiamo considerando il limite
CAPITOLO 3. LA FASE DI BERRY
40
per → 0, otteniamo
ψ(x, t) =
X
m
Z
i t
0
0
cm (t0 )φm (x, t) exp −
Em (t ) dt
~ 0
lim hφm , (N − 1)|φm , (N − 2)i × · · · × hφm , |φm , t0 i (3.22)
→0
dove φm (x, t) = hx|φm , ti = lim→0 hx|φm , (N − 1)i, poichè N = t per costruzione [paragrafo 1.3.1]. Per valutare il limite dei prodotti che compaiono
nell’ultima espressione per ψ notiamo che è possibile scrivere
|φm , t + i = |φm , ti +
d |φm , ti
+ O(2 )
dt
(3.23)
e quindi
hφm , (l + 1)|φm , li = 1 +
d hφm , l|
dt
|φm , li + O(2 ) =
= ehφ̇m ,l|φm ,li + O(2 ) (3.24)
d hφm , lt|
.
dt
Otteniamo finalmente il risultato cercato usando il risultato (3.24) e valutando il limite → 0
Z t
Z
X
i t
0
0
0
0
0
hφ̇m , t |φm , t i dt
Em (t ) dt exp
ψ(x, t) =
cm (t0 )φm (x, t) exp −
~ 0
0
m
(3.25)
Il termine hφ̇m , t|φm , ti è un numero immaginario puro come si può vedere
tenendo conto della relazione di ortonormalità degli autoket di H
dove abbiamo usato la notazione compatta hφ̇m , l| =
d
d hφm , t|
d |φm , ti
(hφm , t|φm , ti) =
|φm , ti + hφm , t|
=0 .
dt
dt
dt
(3.26)
Pertanto anche il secondo esponenziale che compare in (3.25) apporta un contributo di fase ad ogni autofunzione φm (x, t). E’ bene sottolineare la natura
completamente diversa degli argomenti dei due esponenziali che compaiono
in (3.25):
i Rt
0
0
0 Em (t ) dt
• e ~
rappresenta l’usuale fase dinamica che acquista ogni autostato su cui era decomposta ψ0
−
Rt
0
0
0
• e 0 hφ̇m ,t |φm ,t idt è invece un termine di fase che ha natura puramente
geometrica, ovvero dipende dalle proprietà dello spazio dei parametri
dell’Hamiltoniana.
CAPITOLO 3. LA FASE DI BERRY
41
Cerchiamo ora di rendere più esplicita la dipendenza dell’ultimo termine
dalla geometria del sistema.
Ricordiamo che avevamo supposto H(R(t)) dove R(t) è un parametro, e che
in realtà la scrittura hφ̇m , t|φm , ti si leggerebbe più propriamente
d hφm , R(t)|
~ R hφm , R(t)|) |φm , R(t)i dR .
|φm , R(t)i = (∇
hφ̇m , t|φm , ti ≡
dt
dt
(3.27)
Possiamo quindi scrivere ψ nella forma
Z
X
i t
0
0
ψ(x, t) =
cm (t0 )φm (x, t) exp −
Em (t ) dt
~
0
m
Z R(t)
~
hφm , R(t)| (∇R |φm , R(t)i)dR
(3.28)
× exp −
R(0)
3.0.2
Trasformazioni della fase geometrica per cambio
di base
Consideriamo una nuova base di autoket di H
∃ ϕn (R(t)) :
H(R(t)) |ϕn , R(t)i = En (R(t)) |ϕn , R(t)i
hϕn , R(t)|ϕm , R(t)i = δn,m
Deve esistere una trasformazione unitaria (parametrizzata da t) che leghi i
ket delle due basi, cioè
|ϕn , R(t)i = eiαn (R(t)) |φn , R(t)i
(3.29)
con α(R(t)) reale. In quello che segue, in maniera analoga a quanto fatto nel
paragrafo precedente, adotteremo, dove ci sembrerà necessario, la notazione
|ϕn , R(t)i ≡ |ϕn , ti.
Riscriviamo lo stato iniziale in termini degli autoket della nuova base
X
|ψ0 i =
dm (t0 ) |ϕm , t0 i
(3.30)
m
−iαm (t0 )
dove dm (t0 ) = e
cm (t0 ). Seguendo lo stesso procedimento di prima
otteniamo
Z
X
i t
0
0
ψ(x, t) =
dm (t0 )ϕm (x, t) exp −
Em (t ) dt
~ 0
m
Z R(t)
~ R |ϕm , R(t)i dR
× exp −
hϕm , R(t)| (∇
(3.31)
R(0)
CAPITOLO 3. LA FASE DI BERRY
42
Usiamo ora Eq.(3.29) per riscrivere l’ultimo termine
~ R |ϕm , R(t)i = i ∇
~ R αm (R(t)) |ϕm , R(t)i + eiαm (R(t)) ∇
~ R |φm , R(t)i
∇
⇓
~ R |ϕm , R(t)i = i ∇
~ R αm (R(t)) + hφm , R(t)| ∇
~ R |φm , R(t)i
hϕm , R(t)| ∇
E sostituirlo nell’espressione per ψ
Z
i t
0
0
Em (t ) dt
ψ(x, t) =
cm (t0 )ϕm (x, t) exp −
~ 0
m
Z R(t) ~ R αm (R(t)) − i hφm , R(t)| ∇
~ R |φm , R(t)i dR
× exp −i
∇
.
X
R(0)
~ (m)
Riscriviamo il secondo esponenziale in funzione di un parametro A
α (R)
Z
exp −i
R(t) ~
~
∇R αm (R(t)) − i hφm , R(t)| ∇R |φm , R(t)i dR =
R(0)
Z
= exp i
R(t)
(m)
~
Aα (R) dR
R(0)
con
~ (m)
~
~
A
α (R) = i hφm , R(t)| ∇R |φm , R(t)i − ∇R αm (R(t)) .
(3.32)
Consideriamo ora il caso t 6= T , dove R(T ) = R(t0 ). E’ sempre possibile
scegliere una funzione αm (R(t)) in modo che risulti
Z
R(t)
~ (m)
A
α (R) dR = 0 .
(3.33)
R(0)
Ciò può essere ottenuto semplicemente risolvendo la seguente equazione differenziale
~ R αm (R(t)) = i hφm , R(t)| ∇
~ R |φm , R(t)i .
∇
(3.34)
La scelta di una αm (R(t)) che verifichi Eq.(3.34) corrisponde ad una scelta
di gauge in cui la fase geometrica che compare in Eq.(3.28) risulti nulla.
Pertanto in questo caso (t 6= T ) quest’ultima non è un osservabile del sistema.
Consideriamo invece il caso in cui t = T . Ora l’integrale curvilineo (3.33)
CAPITOLO 3. LA FASE DI BERRY
43
diventa un integrale su un circuito chiuso e pertanto possiamo applicare il
Teorema di Stokes. Così otteniamo
Z
I
(m)
~R×A
~ (m)
~
.
(3.35)
Aα (R) · dR = (∇
α (R)) n̂dS
S
~ (m)
Sostituiamo ora la definizione di A
α (R) e, ricordando che ∀ αm (R(t)) vale
~
~
∇R × [∇R αm (R(t))] = 0, otteniamo
I
~ (m)
A
α (R)·dR =
Z S
~
~
~
∇R × i hφm , R(t)| ∇R |φm , R(t)i−∇R αm (R(t)) n̂dS =
Z ~
~
=
∇R × i hφm , R(t)| ∇R |φm , R(t)i n̂dS (3.36)
S
Definiamo la fase di Berry γm come
I
I
(m)
~
~ R |φm , R(t)i · dR .
γm ≡ Aα (R) · dR = i hφm , R(t)| ∇
(3.37)
Poichè γm non dipende da αn (R(t)), essa non dipende dalla base scelta e
quindi è una proprietà osservabile del sistema . La fase di Berry è funzione solo della geometria dello spazio dei parametri ed è misurabile sperimentalmente. Notiamo che γm è effettivamente una fase poichè, come visto
precedentemente, il termine hφ̇m , t|φm , ti è immaginario puro [Eq.(3.26)].
Conclusioni
In questo lavoro di tesi abbiamo presentato l’approccio di Feynman alla meccanica quantistica e risolto un problema attraverso l’uso del path integral, lo
strumento matematico su cui si fonda questa rappresentazione della teoria.
La formulazione di Feynman possiede diversi svantaggi rispetto a quella canonica. Ad un livello elementare, questi sono costituiti principalmente dal
fatto che quasi sempre risulta più semplice risolvere un’equazione differenziale (quella di Schrödinger) piuttosto che valutare il corrispondente path
integral. Affrontando invece problemi più complessi, l’approccio tramite l’integrale sui cammini restituisce spesso quantità divergenti che quindi risultano intrattabili. Per questi motivi non viene generalmente preferito rispetto a
quello canonico; ciò non toglie che rivesta comunque una grande importanza
nell’ambito dello studio della meccanica quantistica, principalmente per due
motivi:
• come sottolineò lo stesso Feynman, l’essere in grado di dire la stessa
cosa in molti modi diversi non può che rafforzare le nostre conoscenze
al riguardo.
• il path integral si è rivelato col tempo uno strumento di indagine teorica
di vastissima portata, in particolar modo nella formulazione delle teorie
di gauge.
Dal momento che le conoscenze acquisite dopo un percorso triennale non
erano sufficienti ad avviare una speculazione nella direzione espressa dal secondo punto, abbiamo scelto di concentrarci invece sul primo dei vantaggi
sopra elencati.
Solitamente l’integrale sui cammini viene introdotto a partire dalla formulazione canonica mostrando, attraverso la formula di Trotter, che è possibile
esprimere l’ampiezza di transizione dell’operatore di evoluzione temporale
con un path integral. La scelta che abbiamo seguito invece è quella che
adotta anche Feynman nel suo famoso libro "Quantum Mechanics and Path
Integrals" [2]. Siamo partiti col presentare l’esperimento delle due fenditure
e quindi abbiamo discusso i risultati che si ottengono mostrando come, da
44
Conclusioni
45
questi, possa nascere in maniera piuttosto naturale l’idea di calcolare l’ampiezza totale del processo di propagazione di una particella quantistica fra
due punti fissi, assegnando un’ampiezza ad ogni alternativa e integrando poi
su tutti i possibili cammini. Nel discutere l’esperimento abbiamo scelto di
dare molto spazio alle motivazioni fisiche che hanno condotto Feynman a
enunciare i suoi assiomi della teoria riducendo al minimo il formalismo.
Il secondo capitolo è diviso in due parti. Nella prima abbiamo sviluppato
alcune tecniche matematiche che risultano di grande utilità nella trattazione
degli integrali di cammino: in particolare ci siamo concentrati su una trattazione generale degli integrali gaussiani e sulle proprietà di convoluzione del
propagatore, da cui abbiamo derivato la regola per eventi che accadono in
successione. Sempre in questa prima parte abbiamo mostrato come sia possibile ridurre il path integral ad un’equazione differenziale per una funzione
d’onda ψ: in questo modo abbiamo ricavato l’equazione di Schrödinger e
mostrato quindi l’equivalenza formale delle due rappresentazioni. Dopo aver
elencato alcuni risultati familiari di meccanica ondulatoria, abbiamo ottenuto un’equazione differenziale per il propagatore K(b, a) e così siamo arrivati
alla conclusione che esso è in realtà la funzione di Green dell’equazione di
Schrödinger. Nella seconda parte abbiamo affrontato la risoluzione di alcuni
problemi elementari, primo fra tutti la particella libera. Questo ci ha permesso di approfondire la nostra conoscenza del nuovo strumento matematico di
cui abbiamo fatto largo uso e dei concetti fondamentali della teoria in questa
sua diversa formulazione.
Nell’ultimo capitolo invece abbiamo affrontato un problema più pratico: il
calcolo della fase di Berry (anche detta fase geometrica). La scelta di applicare il formalismo basato sugli integrali di cammino a questa situazione particolare è stata motivata essenzialmente dal fatto che questo risulta essere uno
dei pochi casi in cui una trattazione del genere si rivela più comoda rispetto
all’approccio tramite l’equazione di Schrödinger. La fase geometrica, introdotta dal fisico britannico Michael Berry, è la fase acquistata da uno stato
quantistico a seguito di una variazione adiabatica ciclica dell’Hamiltoniana.
Questa fase è un’osservabile del sistema e si rivela di grande importanza nello
studio dell’effetto Aharanov-Bohm e dell’effetto Jahn-Teller.
Per concludere possiamo affermare che esplorare un nuovo approccio alla
meccanica quantistica si è rivelato molto interessante principalmente perchè
ci ha permesso di apprezzare alcune applicazioni del path integral e rivalutare, alla luce del lavoro svolto, molte caratteristiche della formulazione
tradizionale.
Bibliografia
[1] M. A. Alves, M. T. Thomaz. Berry’s phase through the path integral
formulation, American Journal of Physics, 75, 552 (2007).
[2] R. P. Feynman, A. R. Hibbs. Quantum Mechanics and Path Integrals,
Dover emended edition, 2010.
[3] W. K. Heisenberg. I principi fisici della teoria dei quanti. Bollati
Boringhieri, 2016.
Tutte le figure sono tratte dal libro "Quantum Mechanics and Path Integrals"
[2] .
46