Facoltà di Ingegneria Corsi di Laurea in:
Ingegneria Civile ed in Ingegneria per l’Ambiente ed il Territorio
Corso di Geotecnica II - Anno Accademico 2003/04
Prof. Ing. Teresa Crespellani
PROPRIETÀ DINAMICHE
DEI TERRENI DA PROVE IN SITO
Appunti della lezione del 10/03/’04
Ing. Giacomo Simoni
INDICE
1 Introduzione
2 Prove cross-hole
2.1 Procedura sperimentale
2.2 Analisi delle misure sperimentali
3 Prove down-hole
3.1 Procedura sperimentale
3.2 Analisi delle misure sperimentali
Proprietà Dinamiche dei Terreni da Prove in Sito
2
1 Introduzione
Rispetto alle prove dinamiche in laboratorio, le prove in sito presentano sia dei vantaggi che degli
svantaggi. L’esame dei vantaggi e degli svantaggi di prove di laboratorio e in sito proprie della Dinamica
dei Terreni ha evidenziato che le due classi di prove sono da considerare come procedure complementari
che applicate in parallelo permettono di ottenere informazioni utili nella caratterizzazione meccanica dei
terreni1.
Tra i vantaggi delle prove dinamiche in sito si può ricordare che queste sono generalmente più rapide ed
economiche, permettono di ottenere una descrizione più continua delle caratteristiche geotecniche con la
profondità, permettono di esaminare un volume maggiore di terreno ed infine consentono di definire in
modo più attendibile i parametri di deformabilità. Mentre, tra gli svantaggi, quello principale è legato alle
difficoltà nella determinazione delle condizioni al contorno del problema in esame; sono difficili da
determinare le condizioni di drenaggio e lo stato tensionale. Inoltre i risultati che si ottengono non sempre
sono di agevole interpretazione in quanto l’esecuzione stessa della prova stessa può introdurre dei fattori di
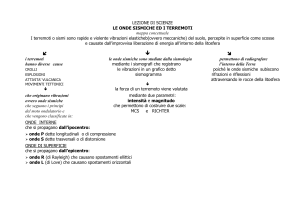
disturbo che ne falsa l’esito. Nell’analizzare le due classi di prove dinamiche è da ricordare che ognuna di
esse esplora il comportamento del terreno in un particolare campo di ampiezze della deformazione di taglio,
figura 1.
Le proprietà dinamiche dei terreni rivestono un ruolo centrale nella determinazione degli effetti sismici
locali sia per terreni sismicamente stabili (che durante un evento sismico raggiungono modesti livelli
deformativi) sia per terreni sismicamente instabili (che in occasione di un terremoto raggiungono valori
delle deformazioni di taglio che ne causano la rottura). Gli scenari di pericolosità e le problematiche
geotecniche, e conseguentemente i parametri e il tipo di indagini per la loro determinazione, sono molto
diversi nei due casi, figura 1. Nel primo caso infatti i parametri di maggiore interesse sono la rigidezza e le
proprietà smorzanti dei terreni; nel secondo caso il parametro chiave è la resistenza al taglio, e le condizioni
al contorno che si hanno a livello di megastruttura divengono più importanti. Considerato che l’analisi del
comportamento dinamico dei terreni a bassi livelli deformativi ha avuto carattere determinante nel progetto
di microzonazione sismica in Valtiberina, le indagini descritte nel presente lavoro, sia in sito sia di
laboratorio, si riferiscono ad esse.
Figura 1 Livelli deformativi interessati da prove dinamiche in sito e di laboratorio.
Relativamente alle prove dinamiche in sito, è da tenere presente che quelle proprie dell’Ingegneria
Geotecnica si distinguono da quelle utilizzate in Geofisica sostanzialmente per gli obiettivi che si
1
Si vedano ad esempio i lavori di: Jamiolkowski et al., 1985; Lancellotta, 1987.
Proprietà Dinamiche dei Terreni da Prove in Sito
3
prefiggono di raggiungere. Concepite nel campo della Geofisica, le prime tecniche di indagine sismica in
sito sono state rivolte innanzitutto all’individuazione delle grandi “strutture” sepolte e alla descrizione della
morfologia sommersa, in secondo luogo alla definizione delle proprietà meccaniche del mezzo di
propagazione. Tali tecniche necessitano di sorgenti non direzionali, che generano prevalentemente onde di
compressione P, utili ai fini della caratterizzazione delle proprietà meccaniche delle formazioni rocciose
attraversate. La ricezione delle onde avviene spesso a grandi distanze dalla sorgente, far field, e
l’interpretazione delle misure risulta quindi più agevole.
Nell’ambito dell’Ingegneria Geotecnica, i criteri di base dei metodi geofisici sono stati sviluppati allo
scopo di pervenire alla definizione di dettaglio delle proprietà meccaniche dei singoli strati dei depositi
investigati. Tali tecniche necessitano di sorgenti direzionali, in grado di generare onde di taglio oppure onde
di Rayleight, le sole efficaci alla caratterizzazione delle terre sciolte anche se sature. Queste onde sono
registrate a distanze minori e spesso in condizioni near field, rendendo talora l’interpretazione delle misure
particolarmente ostica; per questi motivi sono state concepite specifiche tecniche di analisi.
2 Prove cross-hole
Le prove sono finalizzate a determinare la velocità di propagazione delle onde di volume2 all’interno del
terreno, note le quali è possibile risalire ai parametri di deformabilità. Infatti, poiché le prove dinamiche in
sito prevedono bassi livelli di energia e, conseguentemente, implicano bassi livelli di deformazione (γ < 103
%), il terreno è sollecitato in campo elastico. Come noto, in un mezzo elastico la velocità delle onde
sismiche (Vs e VP rispettivamente velocità di propagazione delle onde S e delle onde P) sono legate al
modulo di taglio Gmax,al coefficiente di Poisson ν e al modulo di Young dalle relazioni:
2
Gmax = ρ ⋅ VS
ν=
1 VP
2 VS
2
− 1
[1]
2
− 1
2 (1 + υ )(1 − 2υ )
E = ρ ⋅V p
(1 − υ )
dove ρ rappresenta la densità del mezzo attraversato.
In generale, le prove cross-hole, a causa delle specifiche modalità esecutive, § 2.1, sono preferibili alle
prove down-hole quando si vogliono ottenere dei valori puntuali di velocità di buona qualità ed alta
precisione, e quando le profondità di interesse sono elevate (anche superiori a 100 m). Nel corso delle prove
le vibrazioni sono generate artificialmente mediante una sorgente collocata ad una certa profondità in un
foro di sondaggio, e sono rilevate ad una data distanza mediante uno o più ricevitori, collocati alla
medesima profondità, in uno o più fori di sondaggio allineati con il foro sorgente. Viene misurato il tempo
necessario alle onde di volume per spostarsi tra due punti interni nel terreno. Conoscendo le distanze
percorse, le velocità di propagazione delle onde vengono calcolate mediante i tempi di viaggio. Per una
misura accurata sono necessarie le seguenti componenti: a) una sorgente meccanica da foro, in grado di
generare onde elastiche direzionali (SV, onde di taglio polarizzate verticalmente), dotata di trasduttore per la
definizione dell’istante di partenza (trigger) della sollecitazione dinamica; b) un ricevitore da foro
(geofono)3, con appropriata risposta in frequenza, direzionale e dotato di un sistema di collegamento al
VP
VS
2
Le vibrazioni prodotte da una sollecitazione dinamica si propagano all’interno di un mezzo continuo sotto forma di onde di volume
(onde di compressione o P e onde di taglio o S) mentre, sulla superficie del mezzo, sotto forma di onde di superficie (onde di
Rayleigh o Love).
3
Un geofono consiste in una terna di trasduttori di velocità orientati perpendicolarmente fra loro contenuti in un unico involucro. In
genere è preferibile utilizzarne almeno due, sia nel metodo cross-hole che nel metodo down-hole, al fine di effettuare misure più
accurate come chiarito in seguito nel presente capitolo.
Proprietà Dinamiche dei Terreni da Prove in Sito
4
terreno affidabile; c) un sistema di acquisizione multi-canale per registrare in modo digitale sia il segnale
del trigger sia le forme d’onda nonché di registrarli su memoria di massa.
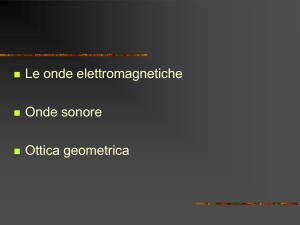
2.1 Procedure sperimentali
La prova, schematizzata in figura 2, consiste nel produrre all’interno del terreno, ad una profondità nota,
una sollecitazione verticale mediante una sorgente meccanica, e nello studiare il treno d’onde, P e S, che si
propagano all’interno del terreno in direzione orizzontale, con vibrazioni polarizzate nella direzione di
propagazione (onde P), e dirette perpendicolarmente alla direzione di propagazione, polarizzate su un piano
verticale (onde SV). Le verticali impiegate per l’esecuzione di misure CH sono generalmente poste ad
interasse compreso tra i 3 e i 5 metri.
Nella fase di perforazione i fori vengono sostenuti mediante fanghi bentonitici, per ridurre l’effetto di
disturbo del terreno. I diametri delle trivellazioni sono di solito piuttosto piccoli (con diametro interno
compreso tra 80 e 125mm). I fori vengono poi rivestiti di materiale ad alta impedenza alle vibrazioni, quale
per esempio alluminio o PVC, e lo spazio anulare tra il foro ed i tubi viene riempito con una malta a ritiro
controllato.
sorgente
1 ricevitore
2 ricevitore
Figura 2 Schema di prova cross-hole a due ricevitori.
Per eseguire la cementazione in modo da garantire la continuità del contatto terreno-tubazione è
necessario, prima ancora di collocare il rivestimento, chiudere il fondo del foro con un cappello (packer)
dotato di valvola di controllo sferica one-way; dopodiché, una volta posizionata la tubazione di rivestimento
e centrata rispetto alle pareti del foro con l’ausilio di appositi distanziatori montati sul fondo, viene calato
all’interno del foro, fino a raggiungere la valvola, un tubicino in PVC collegato in superficie ad una pompa
convenzionale per mezzo della quale viene iniettata la miscela cementizia, che, una volta raggiunto il fondo
del foro, inizia a riempire dal basso verso l’alto in maniera uniforme l’intercapedine tra foro e rivestimento,
spazzando via il fango e i detriti eventualmente presenti. Laddove non sia possibile utilizzare o posizionare
il cappello di fondo, è possibile calare direttamente il tubo per l’iniezione nell’intercapedine fino al fondo
del foro e quindi procedere alla cementazione.
Successivamente, dato che la prova richiede una conoscenza precisa dell’interasse dei fori alle varie
profondità di indagine, è necessario ricorrere ad un accurato controllo della deviazione dalla verticale dei
fori, e lo strumento generalmente utilizzato è l’inclinometro.
Generalmente la distanza tra le misure è circa pari ad 1m e la procedura sperimentale può essere
sintetizzata nelle seguenti cinque fasi: 1- la sorgente viene calata in uno dei fori di estremità
dell’allineamento e, raggiunta la profondità desiderata, viene bloccata contro le pareti delle tubazioni di
rivestimento; 2 - nei fori restanti vengono immersi due ricevitori, portandoli in quota con la sorgente ed
assicurandoli alle pareti del rivestimento; 3- viene prodotta una sollecitazione verticale che attiva il trigger
ed innesca la propagazione di onde di taglio SV nel terreno; 4- viene fatta partire la registrazione delle
vibrazioni captate dal sensore disposto nella sorgente e dai trasduttori dei ricevitori con un opportuno
Proprietà Dinamiche dei Terreni da Prove in Sito
5
anticipo rispetto al segnale del trigger; 5- effettuate le misure, viene modificata la profondità di prova e
ripetuta la procedura sperimentale.
2.2 Analisi delle misure sperimentali
L’analisi delle misure sperimentali eseguite nel corso di prove cross-hole può essere effettuata nel
dominio del tempo e nel dominio delle frequenze. Di seguito si riportano sinteticamente i principali metodi
di analisi che è possibile compiere nei due domini rimandando alla letteratura specifica per
approfondimenti4.
Analisi delle misure nel dominio del tempo
L’acquisizione di una misura CH a due ricevitori consiste nella registrazione simultanea delle vibrazioni
del trigger e dei sensori dei geofoni. La determinazione dei tempi di viaggio delle onde avviene attraverso
l’analisi visuale delle vibrazioni, sulla base del riconoscimento di punti caratteristici. Mediante la
registrazione del segnale di trigger si individua il punto T, che rappresenta l’istante di applicazione
dell’impulso e quindi lo zero dei tempi. La parte successiva della registrazione è di scarso interesse, poiché
non rappresentativa vibrazioni trasmesse al terreno. I tempi di arrivo delle onde P ed S vengono poi
individuati su ciascuna delle tracce ai ricevitori e rappresentano i tempi di arrivo di compressione e di taglio
rispettivamente. In ciascuna traccia temporale registrata dai ricevitori è possibile distinguere tre parti
principali: la prima, tra i punti T e P, del tutto piatta, rappresenta il tempo necessario affinché le vibrazioni
polarizzate nella direzione di propagazione raggiungano il ricevitore; la seconda tra i punti P e S,
caratterizzata da oscillazioni di piccola ampiezza indotte dall’arrivo e dallo smorzamento delle onde di
compressione; la terza a destra del punto S, rappresentativa delle vibrazioni prodotte dalle onde di taglio.
Nel caso in cui la vibrazione prodotta dalla sorgente incontri lungo il proprio percorso brusche variazioni
di rigidezza, è possibile che vibrazioni prodotte da onde P ed S riflesse e rifratte raggiungano i ricevitori
prima delle onde dirette di taglio. Di solito, tuttavia, la loro ampiezza è relativamente piccola per cui è
comunque agevole l’identificazione dei tempi di viaggio delle onde S dirette.
Le velocità di propagazione sono calcolate sulla base delle distanze sorgente-ricevitore e degli intervalli
di tempo compresi tra i punti T e P, per la determinazione di VP, e compresi tra i punti e T-S, per la
determinazione di VS. utilizzando due ricevitori risulta possibile definire due valori di velocità dirette,
corrispondenti ai percorsi sorgente-primo ricevitore e sorgente-secondo ricevitore. Risulta inoltre possibile
definire un terzo valore di velocità, relativo al percorso tra i due ricevitori ed alla differenza tra i tempi di
arrivo (velocità di intervallo). I tempi di viaggio tra i ricevitori possono essere rilevati, inoltre, tramite i
punti caratteristici dei segnali – picchi, valli o zero-crossing – successivi al primo arrivo. Tali valori di
velocità sono, tuttavia, disturbati dal fenomeno dello spreading che produce l’incremento della distanza
temporale tra i punti caratteristici dei segnali sismici al crescere della distanza dalla sorgente, nonché
l’appiattimento progressivo dei picchi. Ciò può determinare diminuzioni anche notevoli delle velocità,
rispetto a quelle determinate sulla base dei primi arrivi (Mancuso et al., 1988). Si ricorda inoltre che, nella
pratica sperimentale, al fine di attenuare il rumore di fondo, si opera mediando più registrazioni. Infatti,
generando più volte lo stesso segnale, sincronizzato con l’istante trigger, ad una data distanza dalla sorgente
si presenterà sempre nella stessa posizione temporale; il rumore, essendo invece non sincronizzato, si
presenterà in maniera casuale e quindi, il suo effetto risulterà attenuato mediando più registrazioni.
Un altro tipo di analisi dei dati sperimentali che può essere effettuata nel dominio del tempo, qualora si
siano effettuate misure a più ricevitori, è la così detta correlazione incrociata o cross correlation, CC xy (τ ) ,
che consente di determinare i tempi associati allo spostamento dell’intera forma d’onda tra il primo ed il
secondo ricevitore. Matematicamente, la funzione misura il grado di correlazione tra la forma di due segnali
x(t) e y(t) prodotti da un singolo impulso ed acquisiti in due punti allineati con la sorgente. La posizione
temporale del segnale relativo al ricevitore più distante, y(t), viene modificata attraverso una traslazione
temporale τ nel verso decrescente dei tempi, anticipandone, cioè, artificiosamente l’arrivo. Per ogni valore
di τ è possibile individuare un valore della cross correlation mediante la relazione:
4
Si vedano ad esempio i lavori di Mancuso, 1995; Mancuso et al. 1988; Mok, 1987; Simonelli e Mancuso, 1999; Stokoe et al. 1989.
Proprietà Dinamiche dei Terreni da Prove in Sito
6
+∞
CC xy (τ ) =
∫ x(t ) ⋅ y(t + τ ) dt
[2]
−∞
Calcolando i valori assunti dalla [2] al variare τ su tutto il periodo di registrazione dei segnali, viene
individuato l’andamento della CC xy (τ ) . Quindi, ogni punto della cross correlation rappresenta la somma
dei prodotti delle ampiezze registrate dal primo ricevitore per quelle del secondo, traslate di un intervallo
temporale τ nella direzione decrescente dei tempi. La CC xy (τ ) assume valore massimo quando τ assume un
valore tale che i picchi più significativi delle due forme d’onda risultano sovrapposti (figura 7). Questo
valore, τ = τcc, corrisponde al tempo necessario affinché la parte più significativa delle vibrazioni passi dal
primo al secondo ricevitore e permette, data la distanza tra i due ricevitori δ, di determinare a che velocità si
sono propagate le vibrazioni Vxy = δ / τcc. In particolare, i valori delle velocità determinati mediante cross
correlation rappresentano velocità globali che, a causa del fenomeno dello spreading, possono risultare
sottostimate.
Analisi delle misure nel dominio delle frequenze
Come noto, mediante la serie di Fourier, qualsiasi segnale sismico può essere rappresentato come somma
indefinita di sinusoidi di ampiezza, frequenza e fase opportune.
Tale concetto, evidenzia l’esistenza di due possibili rappresentazioni di una stessa onda: una che
rappresenta il moto del tempo l’altra, che rappresenta le armoniche componenti del segnale (spettro lineare).
Mediante la trasformata diretta di Fourier (FT) si individuano le ampiezze e le fasi delle armoniche;
mediante, invece, la trasformata inversa di Fourier (IFT) si ottiene la conversione dal dominio delle
frequenze a quello del tempo.
Dal punto di vista matematico, ogni punto della FT, unitamente alla propria fase, rappresenta un vettore
che è quindi descrivibile con un numero complesso. Ne consegue che, utilizzando le regole dell’algebra
complessa, l’analisi di coppie di segnali sismici può essere effettuata impiegando delle funzioni che
consentono di combinare le informazioni derivate dalle FT dei segnali stessi. Una di esse è lo spettro
incrociato di frequenza o cross power spectrum, CPS yx ( f ) , particolarmente utile nel caso in cui vengano
combinate due registrazioni x(t) e y(t) derivanti da una stessa sollecitazione dinamica.
La funzione CPS yx ( f ) , è definita dal prodotto dello spettro lineare Y ( f ) del segnale y(t) per il
complesso coniugato dello spettro lineare dell’altra X * ( f ) :
CPS yx ( f ) = Y ( f ) ⋅ X * ( f )
[3]
Ciascuna componente del vettore CPS yx ( f ) sarà rappresentata da un’ampiezza ACPS ( f ) ed una fase
φCPS ( f ) rispettivamente pari al prodotto delle ampiezze ed alla differenza tra le fasi delle componenti degli
spettri correlati. In particolare, il cross power spectrum di due funzioni coincidenti x(t) ≡ y(t) sarà uno
scalare detto auto power spectrum e indicato con APS xx ( f ) .
Come indicato, è possibile attenuare gli effetti del rumore di fondo mediando più registrazioni. Da ciò
deriva possibilità di quantificare il livello di disturbo nelle misure mediante la funzione di coerenza
COxy ( f ) tra i segnali x(t) e y(t) registrati. La misura è concepita sulla media di più coppie di segnali, poiché
la prima è assunta come base di riferimento e le successive come misure della mancata correlazione tra le
componenti di frequenza “disturbate”. La funzione di coerenza è espressa dalla relazione:
*
CPS xy ( f ) ⋅ CPS xy ( f )
[4]
APS yy ( f ) ⋅ APS xx ( f )
dove le funzioni soprassegnate indicano l’operazione di media. Mediante la funzione di coerenza è quindi
possibile definire il campo di frequenze entro cui si ha assenza di disturbi nel quale la funzione assume
valore unitario.
Infine, per determinare la velocità di propagazione delle onde, è possibile utilizzare lo spettro incrociato
di frequenza. Infatti utilizzando la fase φCPS ( f ) , differenza di fase cumulata dalle armoniche di un’onda
sismica nello spostamento tra due punti, è possibile determinare il numero di cicli compiuti durante tale
percorso Nc da cui si deduce la lunghezza d’onda λ e quindi la velocità cercata in funzione della frequenza
V(f). Indicando con δ12 la distanza tra i due ricevitori si ha:
COxy ( f ) =
Proprietà Dinamiche dei Terreni da Prove in Sito
V( f ) = λ ⋅ f =
δ12
Nc
⋅ f = 360° ⋅
δ12
φCPS ( f )
⋅f
7
[5]
3 Prove down-hole
La prova down-hole (DH) è una prova sismica condotta in un unico foro5 finalizzata a misurare la
velocità di propagazione delle onde di P ed S, generate da una sorgente collocata in superficie. Le vibrazioni
prodotte vengono rilevate mediante uno o più ricevitori, posti alle profondità desiderate all’interno del
sondaggio.
La prova down-hole viene impiegata soprattutto quando si desidera ottenere, senza ricorrere ad indagini
troppo costose, dei valori puntuali della velocità, di qualità e precisione evidentemente minore rispetto a
quelle ottenibili mediante prove CH. La prova è significativa solo fino a profondità dell’ordine dei 50÷60m,
in quanto, oltre tale quota i segnali registrati diventano di difficile interpretazione e sono possibili errori
nella stima delle velocità.
Per una misura accurata risultano indispensabili le seguenti componenti: 1) una sorgente meccanica di
superficie in grado di generare onde elastiche direzionali SVH ricche di energia, munita di trasduttore per
l’individuazione dell’istante di partenza delle vibrazioni; 2) duo o più ricevitori da foro, con appropriata
risposta in frequenza, direzionali e dotati di un sistema di collegamento al terreno affidabile; 3) un sistema
di acquisizione digitale multi-canale, in grado di registrare il segnale del trigger e le vibrazioni acquisite dai
ricevitori, conservandoli su memoria di massa.
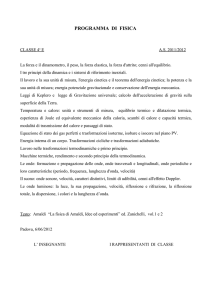
PLANIMETRIA
orientamento
trasduttori
SEZIONE VERTICALE
sorgente
1 ricevitore
2 ricevitore
Figura 3 Schema di una prova down-hole a due ricevitori
Lo schema tipico di una prova down-hole a due ricevitori6, rappresentato in figura 3, prevede: una
sorgente costituita da una piastra connessa alla superficie libera del terreno; attaccato ad essa un trasduttore
di velocità, che funzioni da trigger e due ricevitori identici a quelli del metodo cross-hole.
5
La fase di preparazione delle verticali di sondaggio è analoga a quella descritta per la tecnica CH, eccetto che per la necessità di
un’unica perforazione e la minore sensibilità del metodo DH alla deviazione dei fori dalla verticale, che rimuove il problema delle
misure inclinometriche.
6
La prova può essere condotta anche utilizzando un solo geofono purché tridimensionale, cioè dotato di tre ricevitori disposti
secondo gli assi di una terna cartesiana ortogonale e con la possibilità di controllarne l’orientamento dalla superficie.
Proprietà Dinamiche dei Terreni da Prove in Sito
8
Dopo aver opportunamente predisposto il piano di appoggio vengono adagiate sulla superficie libera del
terreno una sorgente meccanica7 per la generazione di onde S e una piastra d’acciaio per la generazione di
onde P, che costituiscono il sistema di trasmissione dell’energia. La prima di esse, ovvero la sorgente delle
onde di taglio, è posta in modo che i suoi estremi siano equidistanti dalla verticale da investigare. Nel caso
venga utilizzata una longarina piuttosto che una trave in c.c.a. per trasmettere l’energia polarizzata
orizzontalmente, per impedirne lo slittamento a seguito dei colpi orizzontali, viene mantenuta aderente al
terreno facendovi salire un veicolo pesante e/o mediante chiodi metallici.
3.1 Procedura sperimentale
La procedura sperimentale si articola come segue: 1) si predispone il piano d’appoggio togliendo le
eventuali asperità rendendo la superficie liscia eventualmente mediante sabbia. La sorgente delle onde di
taglio viene sistemata in superficie ad una distanza compresa tra 1.5m e 2.5m dal foro e orientata in
direzione ortogonale ad un raggio uscente dall’asse foro; 2) i ricevitori vengono collegati, a distanza8 paria a
1÷3m, in modo da impedirne la rotazione relativa e in modo che i trasduttori orizzontali dei due ricevitori
siano a due a due paralleli; 3) la testa del primo ricevitore viene raccordata ad una batteria di aste che ne
permette l’orientamento dalla superficie; 4) raggiunta la profondità di prova, i ricevitori vengono orientati in
modo che uno dei due trasduttori orizzontali di ciascun ricevitore risulti parallelo all’asse della sorgente
(orientamento assoluto); 5) i ricevitori vengono assicurati alle pareti del tubo di rivestimento; 6) la sorgente
viene colpita lateralmente e, allo stesso tempo, inizia la registrazione del segnale di trigger e dei ricevitori;
7) eseguite le registrazioni, la profondità viene modificata e la procedura ripetuta.
L’orientamento assoluto dei geofoni è di notevole importanza per la corretta interpretazione delle misure,
anche se comporta qualche complicazione sul piano esecutivo. Infatti, orientando i sensori in nel modo
sopra descritto, si conosce a priori la polarità dei segnali attesi e si registrano le onde in arrivo (SVH) con la
massima ampiezza possibile, ottimizzando il rapporto segnale-rumore9, nonché la qualità delle misure.
Le parti di cui si compone l’apparecchiatura utilizzata per questo tipo di prove si compone delle seguenti
quattro parti: sistema sorgente; sistema di ricezione; sistema di acquisizione e registrazione dati e il trigger).
Sorgente. La sorgente deve essere in grado di generare onde elastiche con forme d’onda ripetibili e
direzionali, cioè con la possibilità di ottenere prevalentemente onde di compressione e/o di taglio
polarizzate su piani orizzontali (ed eventualmente anche verticali). Tale sorgente è generalmente costituita
da una longarina in acciaio di forma tale da potere essere colpita lateralmente ad entrambe le estremità con
un apposito martello. Come anticipato, è importante che la trave venga gravata da un carico statico
addizionale in modo che possa rimanere aderente al terreno sia al momento in cui viene colpita sia
successivamente, affinché l’energia prodotta non venga in parte dispersa. Con questo dispositivo è possibile
generare delle onde elastiche di taglio polarizzate orizzontalmente che si propagano verticalmente, con
distorsioni nella direzione di propagazione e di polarizzazione generalmente esigue e con un contributo di
onde P anch’esso trascurabile. Inoltre, data l’entità di energia generalmente prodotta, le deformazioni
indotte nel terreno in prossimità della superficie sono inferiori a 10-2 % e decrescono con la profondità.
Sistema di ricezione. Tale sistema si compone di uno o due ricevitori, ciascuno dei quali è costituito da
una terna di trasduttori di velocità orientati secondo le componenti di una terna cartesiana ortonormale e
collocati all’interno di un unico contenitore (preferibilmente di forma cilindrica), in modo che uno dei tre
trasduttori sia orientato secondo la lunghezza del contenitore (trasduttore verticale) e gli altri ad esso
perpendicolari (trasduttori orizzontali). I trasduttori devono possedere appropriate caratteristiche di
frequenza e sensitività tali da potere ricevere in maniera adeguata il treno d’onde prodotto dalla sorgente.
Nel caso si utilizzino due ricevitori, essi devono essere collegati, secondo la loro lunghezza, da un
collegamento in grado di fissarne la distanza verticale (compresa tra 1 e 3 m) e l’orientazione relativa (in
7
Generalmente costituita da una longarina metallica o di legno, purché con le estremità di acciaio, oppure da una trave in
calcestruzzo cementizio armato, c.c.a., come nel caso delle prove DH condotte in Valtiberina.
8
La distanza d tra i ricevitori dovrà essere minore della lunghezza d’onda λ delle vibrazioni che si intende misurare, d < λ = VS / f.
9
Conoscendo la funzione coerenza dei segnali registrati dai due ricevitori x(t) e y(t), definita dalla [2.4], il rapporto segnale-rumore
S/R è dato dalla relazione:
COxy ( f )
S
.
(f) =
R
1 − COxy ( f )
Proprietà Dinamiche dei Terreni da Prove in Sito
9
modo che i trasduttori orizzontali siano paralleli e concordi a due a due). Il sistema di collegamento del
geofono superiore alla superficie dovrà permettere di controllare l’orientazione assoluta dei trasduttori
orizzontali.
Trigger. Il trigger consiste in un circuito elettrico che viene chiuso nell’istante in cui il martello colpisce
la longarina, consentendo a un condensatore di scaricare la carica precedentemente immagazzinata e la
produzione di un impulso di modesta durata (tale da annullare possibili effetti dovuti ai rimbalzi del
martello) che viene inviato ad un sensore collegato al sistema di acquisizione dati; in questo modo è
possibile individuare e visualizzare l’esatto istante in cui la sorgente viene attivata e parte la sollecitazione
dinamica.
Sistema di acquisizione e registrazione dati. Si tratta di un sistema multicanale in grado di registrare su
ciascun canale in forma digitale le forme d’onda e di conservarle in memoria di massa. Esso è collegato a
ciascuno dei tre trasduttori di velocità di ciascuno dei ricevitori e al sensore del trigger e consente quindi di
registrare in forma digitale e visualizzare come forme d’onda su un apposito monitor le vibrazioni così
come rilevate ai trasduttori dei ricevitori e l’impulso inviato dal trigger.
3.2 Analisi delle misure sperimentali
Per interpretare le registrazioni down hole e quindi determinare i profili di velocità del sito investigato
esistono diversi metodi di cui i principali sono il metodo diretto e il metodo delle velocità d’intervallo.
Metodo diretto
Questo metodo d’interpretazione prevede che i tempi di viaggio t relativi al percorso sorgente-ricevitore
vengano inizialmente corretti per tenere conto dell’inclinazione dei raggi sismici mediante la seguente
equazione del tempo corretto:
z
z
t* = t =
[6]
2
d
z +H2
dove z rappresenta la profondità dal piano di campagna del ricevitore, d la distanza tra sorgente e ricevitore
ed H è la distanza orizzontale tra sorgente ed asse del foro.
Utilizzando la [6] è possibile definire nel piano t*-z la velocità media delle onde SVH ; infatti, se il terreno
è omogeneo isotropo ed a strati orizzontali la velocità di propagazione delle onde sismiche è determinata
dall’inclinazione rispetto all’asse dei tempi corretti dei segmenti di retta lungo i quali si ha l’allineamento
dei dati sperimentali.
A titolo d’esempio, in figura 4 sono riportate le linee di regressione ottenute applicando il metodo
diretto ai gruppi di dati compresi tra quelli riportati con etichetta vuota.
Metodo delle velocità di intervallo
Questo metodo è impiegato quando le misure sismiche in sito sono state eseguite con uno o due
ricevitori. In particolare, come meglio chiarito in seguito, se l’interpretazione avviene utilizzando le
registrazione di un solo ricevitore, si parla di velocità di pseudo-intervallo; se invece l’analisi delle misure
avviene sulla base delle registrazioni effettuate da due trasduttori appartenenti a diversi ricevitori e
relativamente ad una stessa onda sismica, si parla propriamente di velocità di intervallo.
Le velocità di pseudo-intervallo consentono soltanto apparentemente una migliore definizione dei profili
di velocità rispetto alle velocità medie ottenute con il metodo diretto (Mancuso, 1996). Tali velocità si
ottengono analizzando coppie di registrazioni avvenute a profondità consecutive da un solo ricevitore e,
quindi, relativamente a vibrazioni diverse.
Riferendosi alla figura 5, la velocità di pseudo-intervallo (relativa allo “strato” riportato a tratteggio in
figura) è data dalla relazione:
d j − di
[7]
VS =
t j − ti
dove di è la distanza tra sorgente e ricevitore quando si trova alla profondità zi, mentre ti è il tempo di
transito delle onde S, ovvero, il tempo intercorrente tra il segnale di trigger ed i primi arrivi delle onde di
taglio.
Poiché i tempi di percorso delle onde elastiche tj e ti, nel caso in cui si sia utilizzato un solo ricevitore,
sono relativi a diverse vibrazioni, le velocità che si ottengono sono dette di pseudo-intervallo.
10
Proprietà Dinamiche dei Terreni da Prove in Sito
Nel caso in cui si siano utilizzati due ricevitori, si possono determinare le velocità di intervallo ancora
con la relazione [7] ma con diverso significato dei termini che vi compaiono. Infatti, per ogni vibrazione
prodotta in superficie è possibile analizzare le registrazioni acquisite dai due ricevitori.
Nell’espressione [7], quindi, la relazione intercorrente tra i due tempi, adesso ti e ti+1, acquisisce
maggiore significato. La critica maggiore che può essere mossa ai metodi di analisi delle registrazioni DH
sopra descritti, metodo diretto e metodo delle velocità di intervallo, è quella di ipotizzare che i percorsi delle
onde siano rettilinei, ovvero coincidenti con quelli che vanno dalla sorgente ai ricevitori.
Evidentemente ciò non corrisponde alla realtà, poiché, prima di raggiungere i ricevitori, le onde sismiche
subiscono fenomeni di rifrazione e riflessione che ne modificano il percorso.
sorgente
di
zi
dj
zj
z
Figura 4 Velocità delle onde S
interpretate con il metodo diretto
nel piano t*-z.
Figura 5 Schematizzazione
del percorso di raggi sismici
nel terreno.
Alcuni ricercatori (Mok, 1987; Stokoe et al., 1989) hanno proposto una procedura iterativa che permette
di tenere conto del fenomeno della riflessione (secondo la legge di rifrazione nota10 come legge di Snell) e
di avere una misura di affidabilità delle interpretazioni fatte sulla base delle registrazioni sperimentali.
Il metodo proposto dagli autori, a partire dalla modellazione del sito come costituito da una serie di strati
orizzontali e mediante i tempi di arrivo delle onde S individuati per i diversi strati, permette di determinare
le velocità degli strati del modello, considerando il fenomeno della rifrazione che si ha al contatto tra diversi
strati, e di analizzarne l’affidabilità per mezzo di matrici di dispersione dei dati osservati. A titolo
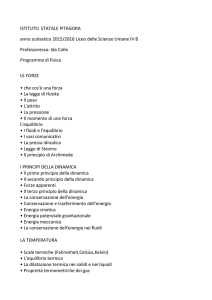
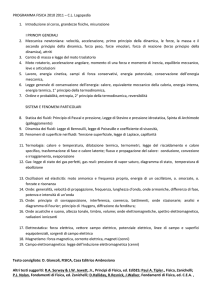
d’esempio, in figura 6, sono riportati gli andamenti dei profili di velocità ottenuti mediante il metodo di
inversione proposto da Mok, il metodo delle velocità di intervallo ed il metodo diretto di cui si è detto sopra.
Nel caso riportato in figura l’aderenza tra i profili di VS ottenuti con i tre metodi appare soddisfacente.
10
Sebbene i tentativi di determinare la legge matematica della rifrazione risalgano all’antichità e al medioevo, la sua precisa
formulazione fu data soltanto nel XVII secolo. I primi a scoprire la legge sembra siano stati l’astronomo e matematico inglese
Thomas Hariot (1560-1621) e il matematico olandese Willebrod Snell (1591-1626), rispettivamente nel 1601/2 e nel 1621. Va
comunque rilevato che questi autori, oltre a non pubblicare i loro risultati, non espressero la legge di rifrazione in termini di rapporto
sin i/sin r, ma nella forma cosec r/cosec i. L’enunciazione esatta della legge di rifrazione venne offerta, per la prima volta, da
Descartes (1596-1650) nella Dioptrique (1637).
11
Proprietà Dinamiche dei Terreni da Prove in Sito
Shear wave velocity (m/s)
0
200
400
600
800
1000
0
Fill
Brown-yellow clayey silt
with sandy lenses
2
Brown-grey sandy-clayey silt
with slices of marl
4
Layered dark grey clayey
marl
6
Layered silty clayey marl
with arenaceous grains
8
10
Light grey calcareous marl
Depth (m)
12
14
inversion
interval
direct
16
Figura 6 Stratigrafia e profili di velocità delle onde di taglio ottenuti
con tre diversi metodi (Crespellani et al., 2001).
1200
12
Proprietà Dinamiche dei Terreni da Prove in Sito
Figura 7 Esempio di elaborazione di prove down-hole
mediante il metodo delle velocità di intervallo e impiego di cross correlazione