Ezio Santini
MACCHINE
ELETTRICHE
Volume I
Circuiti Magnetici – Trasformatori
Roma, 2012
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 1 di 58
CAPITOLO 1 – Le basi dell’ElettroMagnetismo
Premessa............................................................................................................................................... 3
1 I TRE GRANDI TEOREMI FONDAMENTALI ........................................................................ 3
1.1 IL PRIMO GRANDE TEOREMA........................................................................................ 3
1.2 IL SECONDO GRANDE TEOREMA ................................................................................. 3
1.3 IL TERZO GRANDE TEOREMA ....................................................................................... 3
2 IL MODELLO MATEMATICO ED IL CIRCUITO EQUIVALENTE ...................................... 3
3 PROBLEMI LINEARI ................................................................................................................. 5
4 LE EQUAZIONI DI MAXWELL ................................................................................................ 6
5 UNA DEFINIZIONE E DUE TEOREMI .................................................................................... 6
5.1 IL TEOREMA DELLA DIVERGENZA .............................................................................. 7
5.2 IL TEOREMA DI STOKES.................................................................................................. 8
6 FLUSSO ATTRAVERSO UNA DI SEZIONE PUNTIFORME ............................................... 10
7 LE EQUAZIONI A POTENZIALE ........................................................................................... 11
7.1 Il potenziale scalare per il campo elettrostatico .................................................................. 12
7.2 Il potenziale vettore per il campo magnetostatico ............................................................... 13
7.3 Il potenziale vettore in 2D ed il flusso di B ......................................................................... 15
7.4 Significato fisico del potenziale vettore in 2D .................................................................... 17
7.5 Le linee equipotenziali di A e le linee di flusso di B. ......................................................... 18
8 DISTRIBUZIONI DI B PER GEOMETRIE SEMPLICI .......................................................... 18
8.1 L’ induzione magnetica dovuta ad un conduttore di lunghezza infinita ............................. 19
8.2 L’induzione magnetica per una spira circolare ................................................................... 19
9 FLUSSO CONCATENATO CON UNA SPIRA MASSICCIA ................................................ 20
10
ENERGIA NEL CAMPO MAGNETICO .............................................................................. 23
11
RELAZIONI CAUSA-EFFETTO TRA FLUSSO CONCATENATO E
TENSIONI/CORRENTI .................................................................................................................... 26
12
ENERGIA NEGLI INDUTTORI ........................................................................................... 27
12.1
Problemi lineari ............................................................................................................... 27
12.2
Problemi non lineari ........................................................................................................ 28
13
INDUTTORI MUTUAMENTE ACCOPPIATI ..................................................................... 30
14
IL SEGNO DELLA MUTUA INDUTTANZA ...................................................................... 32
15
IL COMPONENTE TRASFORMATORE IDEALE ............................................................. 32
16
DEDUZIONE DEL CIRCUITO EQUIVALENTE DEL TRASFORMATORE MONOFASE
34
17
IL CIRCUITO EQUIVALENTE CLASSICO ........................................................................ 37
18
LA CONVERSIONE ELETTROMECCANICA DELL’ENERGIA ..................................... 39
18.1
la coppia elettromagnetica di riluttanza ........................................................................... 39
18.2
la coppia elettromagnetica di azione................................................................................ 42
APPENDICE 1 ................................................................................................................................... 44
A1-1 Approccio energetico per la dimostrazione dell’uguaglianza dei coefficienti di mutua
induzione negli induttori mutuamente accoppiati .......................................................................... 45
A1-2 Approccio analitico per la dimostrazione dell’uguaglianza dei coefficienti di mutua
induzione negli induttori mutuamente accoppiati .......................................................................... 47
APPENDICE 2 ................................................................................................................................... 49
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 2 di 58
Premessa
1
1.1
1.2
1.3
2
I TRE GRANDI TEOREMI FONDAMENTALI
IL PRIMO GRANDE TEOREMA
IL SECONDO GRANDE TEOREMA
IL TERZO GRANDE TEOREMA
IL MODELLO MATEMATICO ED IL CIRCUITO EQUIVALENTE
A che serve studiare le Macchine Elettriche? Essenzialmente, ci sono due motivi.
1. Vogliamo sapere come si comportano in quanto tali. Vogliamo sapere quanto costano,
quanto consumano, quanto si riscaldano, quanto pesano, qual è il loro limite di potenza.
2. Vogliamo sapere come si comportano in quanto componenti di un grande sistema. Vogliamo
sapere se influenzano la tensione della rete, se ne sono influenzate, qual è il flusso di energia
dalla macchina al sistema e viceversa.
Abbiamo quindi un approccio di natura interna ed un approccio di natura esterna. Ovviamente, tali
approcci richiedono un modello matematico fondato su relazioni differenziali e/o algebriche di I/O
nel quale si presentano inevitabilmente parametri di macchina (ma potrebbe anche essere altro, ad
esempio un modello statistico, un modello esperienziale, un modello neuronale).
La tecnica attuale per lo studio delle Macchine Elettriche tenta di determinare un circuito
equivalente per il singolo dispositivo. Se questo è semplice, il circuito equivalente può essere
derivato analiticamente. Se l’oggetto è complicato, questo circuito si può determinare solo con
misure sperimentali.
Un esempio. Prendiamo la misura del peso di un oggetto. Consideriamo dapprima un oggetto
semplice, ad esempio un cubo di ferro di lato l. Quanto pesa? Se l è in metri, il peso è banalmente
7850 l3 [kg]. Il prodotto tra il volume e la densità volumica. Adesso prendiamo un oggetto un po’
più complicato, ad esempio una bicicletta. Quanto pesa? Qui il problema è più difficile, perché
dovremmo essere in grado di conoscere tutti i dettagli costruttivi, quindi la geometria di ogni
singolo pezzo, poi la densità di ognuno di questi. Ma anche in questo caso, la determinazione
analitica del peso dell’oggetto è possibile. Prendiamo adesso un oggetto estremamente complicato:
il corpo umano. Quanto pesa? Anche in questo caso il peso è l’integrale di volume della densità
volumica. Ma fare quest’integrale analiticamente è impossibile; ed anche numericamente, è
estremamente complicato. Forse, l’unica cosa da fare è pesarlo con una buona bilancia. Niente più.
Con le macchine elettriche faremo la stessa cosa. Cercheremo di determinare un modello strutturale
semplice del dispositivo, che ci permetta di scrivere poche e semplici equazioni. Questo modello
avrà dei parametri interni. Poi, se proprio non possiamo fare altro, calcoleremo i parametri per
mezzo di misure esterne.
Senza voler anticipare niente di quanto verrà discusso nel seguito, facciamo adesso un esempio:
cerchiamo di determinare il circuito equivalente di una lampadina ad incandescenza. Perché una
lampadina? Perché è un oggetto funzionalmente molto semplice, e conosciuto praticamente da tutti.
La lampadina funziona in questo modo: è in pratica un bipolo ai cui estremi elettrici si impone una
tensione, che fa fluire all’interno del bipolo una corrente. Questa corrente provoca un aumento della
temperatura del filamento di tungsteno. Il calore rende incandescente il filamento. Come
conseguenza, la lampadina emette radiazione elettromagnetica e calore.
Una volta compresi i fenomeni fisici che avvengono all’interno della lampadina, questi fenomeni
devono essere modellati matematicamente. Quindi la nostra indagine si compone di due passi:
1. determinare la topologia del circuito equivalente;
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 3 di 58
2. determinare il valore numerico dei parametri che figurano nel circuito equivalente.
I fenomeni che hanno luogo nella lampadina sono estremamente complessi. C’è una conversione di
energia elettrica in energia termica, poi c’è una conversione di energia in energia luminosa;
certamente ci sarà anche un accumulo di energia nel campo magnetico, visto che c’è una corrente
nella lampadina. Poi, siccome ci sono in gioco correnti, allora ci sono in gioco anche cariche
elettriche, e c’è sicuramente da aspettarsi qualche fenomeno capacitivo. Questi fenomeni, poi,
cambiano notevolmente con la natura delle grandezze di ingresso, tipicamente la tensione, ma anche
delle grandezze di contorno, ad esempio il lugo dove è contenuta la lampadina. Per la tensione: può
cambiare la forma d’onda, può essere periodica o aperiodica, può avere un valore massimo
variabile. Per le condizioni al contorno: la lampadina si trova in una ambiente che può dissipare il
calore oppure no? C’è umidità? C’è radiazione elettromagnetica? Quindi il modello matematico
della lampadina è estremamente complesso. Quello che sembrava un oggetto molto semplice è
invece un dispositivo sofisticato, le cui equazioni sono tutt’altro che semplici da determinare.
Ma la domanda principale è un’altra. Noi, che cosa vogliamo dal modello matematico della
lampadina? Che cosa chiederemo, a questo circuito equivalente? Perché, ferma restando la
lampadina, un problema è capire – ad esempio - quanto ci costa l’ora, e tutto un altro problema è
sapere – sempre ad esempio - quanta parte del filamento di tungsteno viene annichilato ogni
microsecondo da eventuali atomi di antimateria e qual è su questo fenomeno l’influenza del vetro di
contenimento. Si tratta di due differenti domande, con due differenti risposte, che possono essere
fornite da due differenti modelli. La lampadina è sempre lei. C’è sicuramente un modello
matematico completo della lampadina che risponde a tutte le possibili domande; probabilmente,
questo modello matematico è di enorme complessità, e la sua risoluzione richiede uno sforzo
titanico. Ma potrebbe anche darsi che un modello matematico molto più semplice fornisca le
risposte che noi desideriamo.
Allora, prima di modellare il problema, facciamo un po’ di ipotesi. Noi utilizzeremo la lampadina in
reti di energia elettrica a 50 Hz, a tensione impressa con valore efficace di circa 230.94 V. La
frequenza non può cambiare; la tensione può variare in somma o in sottrazione del cinque per cento.
E noi? Noi vogliamo soltanto sapere quanto consuma questa lampadina.
Il signore che ha costruito la lampadina ha fatto qualche misura. E sulla confezione della lampadina
scrive che, nelle condizioni ipotizzate:
1. alla tensione nominale di 230.94 V, la lampadina assorbe 100 W di potenza attiva;
2. l’assorbimento di potenza reattiva è praticamente nullo;
3. in un ambiente nel quale si riesce a dissipare tutto il calore, e che ha una temperatura
costante di 25 °C, la temperatura del bulbo è di circa 110 °C, quella del filamento arriva a
1000 °C, e la lampadina dura circa 800 ore.
Dalle condizioni 1. e 2. si deduce che la lampadina può essere schematizzata con una resistenza del
valore di circa 533.33 .
Sembra quindi di poter affermare che il circuito equivalente della lampadina è una resistenza di
valore costante. In realtà ciò non è vero. L’affermazione corretta è un’altra: se la lampadina viene
connessa ad una rete di alimentazione con tensione alternata costante a 50 Hz e 230.94 V, il circuito
equivalente della lampadina è un resistore la cui resistenza ha valore 533.33 .
Ciò vale anche per differenti frequenze? Per altri valori efficaci della tensione? La risposta è
sicuramente no. Basta considerare cosa succede per lampadina non alimentata, cioè a 0 V. La
resistenza misurata della lampadina è completamente differente, circa 50 . Perché questa enorme
differenza (siamo oltre il 90%)? Perché la temperatura influisce sulla resistenza. A freddo, la
resistenza del filamento è molto minore. Quindi il circuito equivalente di cui sopra non è più valido.
Se bisogna tener conto della variazione di resistenza con la tensione, allora bisogna sviluppare un
modello completamente differente.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 4 di 58
In definitiva: “il” circuito equivalente del dispositivo non esiste. In altri termini: non esiste un
modello matematico che risponde a tutti i possibili quesiti sul dispositivo. Esistono invece
moltissimi circuiti equivalenti, ognuno dei quali risponde a domande specifiche sul dispositivo.
In ultima analisi: da chi dipende il circuito equivalente? Dal dispositivo e da me, da come è fatto lui
e da che cosa voglio sapere io.
#Il circuito equivalente di un dispositivo dipende da lui e da me.
3
PROBLEMI LINEARI
Prendiamo in esame una relazione causa-effetto. Ad esempio, la quantità di denaro che dobbiamo
spendere (effetto) in funzione del numero di grammi d’oro da acquistare (causa). Oppure il valore
dell’induzione magnetica in un punto (effetto) in funzione della corrente di conduzione in un
avvolgimento (causa).
Alcune volte le relazioni causa-effetto sono univocamente reversibili, altre no. Ad esempio: nel
caso della compravendita dell’oro si può vedere come causa il denaro e come effetto il numero di
grammi di materiale acquistati, ma si potrebbe anche considerare come causa il numero di grammi
d’oro e come effetto il denaro speso. Una cosa è chiara: se ho una certa somma posso comprare una
quantità d’oro corrispondente, se ho una somma doppia, posso comprare una quantità doppia di oro.
Se un grammo d’oro costa una cifra, un chilo d’oro costa mille volte quella cifra.
Se andiamo a graficare nel piano cartesiano che ha come ascisse la quantità di denaro a disposizione
e come ordinate la quantità d’oro acquistata, il grafico che otteniamo è una retta. In questo caso, si
dice che le due grandezze sono in relazione lineare.
Più in generale, se due grandezze qualsiasi (che chiameremo x e y) sono in relazione tra loro, e se
nel piano x-y questa relazione è espressa da una retta, si dice che la relazione è lineare.
Mentre il prezzo al grammo dell’oro è praticamente indipendente dalla quantità acquistata, il prezzo
di altri oggetti (uno a caso: le mele) è fortemente dipendente dalla quantità acquistata. Ad esempio,
supponiamo che per acquistare un chilo di mele in un negozio di vendita al pubblico si spenda un
euro; acquistando all’ingrosso, mille chili di mele possono costare anche duecento o trecento euro.
Il che significa che il prezzo al chilo passa da un euro a 0.2-0.3 euro. In questo caso, se x è la
quantità di mele acquistate ed y il prezzo pagato, nel piano x-y la relazione che lega x a y non è
espressa da una retta ma da una curva, che in generale ha una difficile formulazione analitica.
Dopo questa digressione – diciamo così – commerciale, torniamo ai nostri problemi convenzionali
di natura magnetico. Per quanto abbiamo detto sopra, la relazione B-H in un punto dello spazio è di
tipo lineare se nel piano B-H tale relazione da luogo ad una retta.
Perché siamo così interessati alla linearità dei problemi? Perché i problemi lineari sono in generale
molto più semplici da risolvere di quelli non lineari. Se è possibile una soluzione in forma analitica,
ed è un caso abbastanza raro per i problemi reali, questa è possibile solo per i problemi lineari e
quasi mai per quelli non lineari. Inoltre, i problemi lineari sono di formulazione più semplice di
quelli non lineari, e sono quindi preferibili per la comprensione teorica.
In realtà, la definizione di linearità è un po’ differente. Riprendiamo in esame una relazione
funzionale, ad esempio una grandezza y che dipende da un’altra grandezza x; di solito questa
relazione funzionale è definita funzione ed è rappresentata simbolicamente nella forma y(x).
Supponiamo di conoscere una coppia di valori della funzione, ad esempio (x1, y1); è ovvio che,
dando alla grandezza x una variazione x, si ottiene una variazione della y pari a y. Allora, se:
- applicando ad x una variazione –x otteniamo per y una variazione–y;
- applicando in qualsiasi altro punto (xp, yp) la stessa variazione x otteniamo la stessa
variazione y,
la funzione y(x) è lineare.
Quanto sopra è un po’ complicato, ed in effetti ha un solo scopo: serve a includere tra le funzioni
lineari quelle la cui rappresentazione grafica non passa per l’origine.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 5 di 58
4
LE EQUAZIONI DI MAXWELL
Seguendo la metodologia intellettuale espressa nei paragrafi precedenti, partiamo dalle basi
dell’elettromagnetismo. E come sanno tutti, le basi di questa scienza sono le celeberrime equazioni
di Maxwell.
D
(4.1)
B 0
(4.2)
D
H J
t
(4.3)
B
E
t
(4.4)
In queste equazioni, H indica il campo magnetico, B la densità di flusso magnetico, D lo
spostamento elettrico, E il campo elettrico. J rappresenta la densità di corrente, e finalmente la
densità volumica di carica elettrica. Ognuno dei vettori di campo è formato da tre componenti che
sono funzioni dello spazio e del tempo. Ad esempio, per il vettore campo elettrico formalmente si
ha:
E ( x, y, z, t ) i Ex ( x, y, z, t ) j E y ( x, y, z, t ) kEz ( x, y, z, t )
(4.5)
Avendo indicato con i , j , k i versori degli assi coordinati (notazione un po’ antiquata, ma molto
leggibile). In altri termini: ogni vettore di campo è formato da tre componenti scalari, cioè da tre
funzioni di punto, che dipendono dalle coordinate spaziali e dalla coordinata temporale.
L’operatore (nabla) compare tanto come prodotto scalare e come prodotto vettore. Formalmente,
infatti, questo operatore può essere scritto come un vettore con le sue componenti spaziali:
i ; j ;k
x y z
(4.6)
Questo operatore è di fatto un “vettore”; o almeno viene trattato come tale. Il prodotto scalare tra
l’operatore ed un vettore produce una grandezza scalare: questa operazione è chiamata
solitamente “divergenza del vettore”. Il prodotto vettore tra ed un vettore produce una grandezza
vettoriale, e questa operazione è chiamata “rotazione del vettore”. Infine, l’applicazione di ad un
campo scalare produce un vettore ed è chiamata “gradiente dello scalare”.
5
UNA DEFINIZIONE E DUE TEOREMI
Adesso definiamo una grandezza che viene calcolata a partire da un campo vettoriale: il flusso di un
vettore attraverso una superficie. Prendiamo in esame un campo vettoriale W ( x, y, z ) definito come:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 6 di 58
W ( x, y, z ) i Wx ( x, y, z ) j Wy ( x, y, z ) k Wz ( x, y, z )
Dove con i , j , k sono stati indicati i versori degli assi coordinati, e con Wx ,Wy ,Wz le componenti
del vettore sui tre assi. Queste componenti, in linea generale, sono funzioni di tutte e tre le
coordinate, nel senso che i vettori variano da punto a punto.
Definiamo adesso il flusso del vettore W ( x, y, z ) attraverso una superficie S come:
(W , S ) W ndS
(5.1)
S
Quindi, l’integrale deve essere esteso a tutta la superficie S, per il calcolo del flusso è necessario
effettuare in ogni punto di S il prodotto scalare tra il vettore W ( x, y, z ) e un vettore normale alla
superficie nel punto.
Per calcolare questa grandezza flusso, bisogna quindi:
1. definire una superficie, aperta oppure chiusa non fa nessuna differenza per la definizione di
flusso;
2. per ogni punto della superficie, definire la normale esterna;
3. per ogni punto della superficie effettuare il prodotto tra la normale esterna e il vettore del
quale si vuole calcolare il flusso. Trattandosi di un prodotto scalare tra due vettori, si ottiene
una grandezza scalare, cioè un numero;
4. ripetere il punto 3. per ogni punto della superficie e fare la somma (cioè effettuare
l’integrale).
Per come è stato definita, è del tutto ovvio che questa grandezza flusso è uno scalare.
Tra alcuni paragrafi, vedremo l’utilizzo che si può fare di questa grandezza. Ma è importante
anticipare che il flusso del vettore induzione magnetica su una superficie aperta è una delle
grandezze più importanti di tutto l’elettromagnetismo.
5.1
IL TEOREMA DELLA DIVERGENZA
Questo teorema stabilisce che il flusso di un campo vettoriale su una superficie chiusa è pari
all’integrale di volume della divergenza dello stesso vettore applicata a tutto il volume racchiuso
dalla superficie. In altri termini: detto W ( x, y, z ) il campo vettoriale, detta S una superficie chiusa,
detto V il volume racchiuso dalla superficie S, si ha:
,
(5.2)
W ndS WdV
S
V
Questo teorema ha un’importanza fondamentale nell’elettromagnetismo. Se prendiamo una
superficie chiusa (ad esempio una sfera, oppure un cubo, un cilindro oppure una superficie
comunque complessa) e applichiamo questo teorema al vettore induzione magnetica, ricordando che
– secondo una equazione di Maxwell – la divergenza di questo vettore è nulla punto per punto:
B ndS BdV 0
S
V
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 7 di 58
In sintesi: il flusso di B attraverso qualsiasi superficie chiusa è nullo.
Prendiamo adesso un solido un po’ strano, ad esempio una semisfera chiusa da un cerchio. Sia C la
circonferenza comune alla semisfera ed al cerchio. È del tutto ovvio che, trattandosi di una
superficie chiusa, il flusso di B attraverso questa superficie (semisfera + cerchio) è nullo.
Consideriamo adesso separatamente i flussi attraverso ciascuna delle due sub-superfici. Non c’è
nessun motivo per il quale il flusso attraverso una delle due superfici debba essere nullo, ed anzi, in
generale, il flusso attraverso ciascuna delle due superfici (prese singolarmente) è diverso da zero.
Però la somma dei due flussi deve essere zero; perciò, i due flussi hanno ugual valore (a parte il
segno). Se prendiamo in esame un’altra superficie aperta che si “appoggia” alla curva C otteniamo
lo stesso risultato. In un certo senso (e questa considerazione non vale per tutti i campi vettoriali,
ma solo per quelli a divergenza nulla, e quindi per il campo magnetico) il flusso dipende da C. In
altri termini: data una curva chiusa C, il flusso attraverso tutte le superfici aperte che si appoggiano
su C ha lo stesso valore.
5.2
IL TEOREMA DI STOKES
La formulazione di questo teorema è la seguente. Dato un dominio 2D o 3D detto S, sia +S la sua
frontiera (che è ovviamente un dominio 2D se S è 3D, ma è un dominio 1D se S è 2D), e detto W il
solito generico campo vettoriale, si ha:
W
n
dS
W
d (S )
(5.3)
S
S
L’importanza di questo teorema è straordinaria. Applichiamolo ad esempio alla terza equazione di
Maxwell per un caso un po’ particolare: un toro costituito da un circuito magnetico intorno al quale
sono avvolte N spire che portano, tutte, la stessa corrente i(t), comunque variabile nel tempo. La
circonferenza media C del toro abbia lunghezza l. La sezione trasversale del toro è circolare e la sua
area vale St. Quale è il problema? Determinare l’andamento del campo magnetico all’interno del
toro.
C
I
V
N
Figura 1 - Un dispositivo elettromagnetico elementare
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 8 di 58
Per fare questo, applichiamo il teorema di Stokes ad un cerchio la cui circonferenza è proprio la
circonferenza media del toro. Quindi, il dominio di applicazione è una superficie aperta 2D che
chiameremo S, mentre C sarà proprio la circonferenza media, cioè la frontiera di S.
La quarta equazione di Maxwell si scrive quindi:
H
n
dS
H
d
C
J
ndS
S
C
S
L’ultimo integrale a secondo membro è pari al flusso della corrente attraverso il cerchio. Siccome
ogni spira è attraversata dalla corrente I, allora il valore dell’integrale è NI. D’altronde, per motivi
di simmetria (ma anche per considerazioni legate alla prima e seconda legge di Ampere) il campo
magnetico H all’interno del toro lungo la circonferenza media è un vettore sempre tangente alla
circonferenza stessa e con modulo costante. Si ha perciò:
Hl NI
(5.4)
In definitiva, la precedente è una forma integrale molto semplice di una delle equazioni di Maxwell.
Viene comunemente chiamato “il teorema delle circuitazione”, è di applicazione immediata, e
permette di stabilire una equazione lineare tra le quantità elettromagnetiche (campo magnetico e
corrente) che si manifestano in dispositivi fisici.
Ma questo teorema permette di determinare una grandezza ancora più importante. Sempre con
riferimento alla geometria precedente, prendiamo in esame l’applicazione della quarta equazione di
Maxwell ad un’altra parte del disegno: la circonferenza rappresentata da una delle spire che
avvolgono il toro. Adesso, quindi, S è la superficie di una spira e C il bordo di S.
B
S E ndS S t ndS
(5.5)
I due integrali possono essere così trasformati:
E
n
dS
E
dC
S
(5.6)
C
B
ndS B ndS
t
t S
t
S
(5.7)
L’integrale di linea del campo elettrico è la tensione ai capi della spira; questa grandezza viene
comunemente chiamata forza elettromotrice indotta nella spira, e viene comunemente indicata con
e. Si ha quindi:
e(t )
(t )
t
(5.8)
La precedente va sotto il nome di Legge di Faraday-Neumann-Lenz, ed è l’espressione della forza
elettromotrice indotta in una spira a sezione puntiforme dovuta alla variazione di flusso concatenato
con la spira stessa.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 9 di 58
6
FLUSSO ATTRAVERSO UNA DI SEZIONE PUNTIFORME
Si prenda in considerazione un conduttore di lunghezza l e sezione trasversale A. Si supponga che:
-
-
la sezione trasversale A sia nulla (e quindi, se il conduttore è percorso da corrente, la densità
di corrente è infinita);
il conduttore sia disposto in maniera tale che i suoi estremi (P e Q) siano infinitamente vicini
senza però toccarsi; per ipotesi, nessun punto del conduttore tocca alcun altro punto del
conduttore, se non i punti a lui immediatamente vicini (in pratica, il conduttore non presenta
nodi o intrecci);
il conduttore, considerando anche il punto mancante per la chiusura, coincide con una linea
chiusa. Esiste sicuramente almeno una superficie chiusa alla quale appartiene la linea
chiusa; tale superficie verrà in seguito indicata con C. Il volume delimitato da C si
definirà con V.
In questo caso, il conduttore si dice formare una spira, che verrà indicata nel seguito con C. In
pratica, la spira C è una curva nello spazio; se esiste un piano il quale contiene tutti i punti della
linea, la spira si definisce planare.
Si consideri ora l’equazione di Maxwell:
B 0
(6.1)
B
dV 0
(6.2)
Si effettui un integrale al volume V:
V
Applicando il teorema della divergenza:
B
(ndC ) 0
(6.3)
C
In altri termini: il flusso del vettore B attraverso la superficie C è nullo.
Si consideri ora una qualsiasi superficie aperta che ha la spira come bordo. L’unico requisito di
questa nuova superficie è che la sua intersezione con la superficie C sia proprio la spira C:
c C
(6.4)
La superficie aperta è detta anche superficie della spira, e l’area di questa superficie viene
chiamata area della spira.
Ora, la spira S divide la superficie C in due superfici A ed B, tali che:
A B C ; A B C
Le tre superfici aperte , A ed B definiscono due nuove superfici chiuse, la prima formata da
ed A e la seconda formata da ed B. Sulla base della proprietà (6.3), anche attraverso queste
superfici chiuse il flusso del vettore B è nullo. Inoltre, le due nuove superfici chiuse hanno in
comune ; di conseguenza, il flusso attraverso A ed B è numericamente uguale, mentre nulla è
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 10 di 58
possibile affermare sul segno, in quanto non è possibile per una superficie aperta definire una
normale esterna. Nel caso in esame, però, definendo la normale esterna alle due superfici A ed B
la stessa normale che entrambe avevano quando venivano considerate come due parti non scisse
della superficie C, si può affermare che la somma dei flussi attraverso le due superfici A ed B è
nulla.
Quanto sopra espresso ha una conseguenza diretta di grande importanza. Se si considera una spira
C, il flusso del vettore B attraverso una qualsiasi superficie che ha la linea C come bordo è il
medesimo.
Si consideri allora il flusso del vettore B attraverso una qualsiasi delle infinite superfici cha hanno
la spira C come bordo. Per ogni punto della superficie della spira è possibile scrivere l’equazione di
Maxwell:
B
E
t
(6.5)
Effettuando un integrale di superficie alla superficie della spira, si ha:
B
Ed t d
(6.6)
Si definisca con (+∂) la frontiera di , in pratica la linea C. Applicando a primo membro il
teorema di Stokes, ed a secondo membro il teorema di commutabilità tra la derivazione temporale e
l’integrazione spaziale, si ha:
(t )
E
d ()
t
(6.7)
In cui con la notazione si è indicato il flusso del vettore B attraverso la superficie . In realtà si
è dimostrato in precedenza che il flusso non dipende dalla superficie ma soltanto dalla linea C;
sarebbe quindi più corretto indicare questo flusso con la notazione S. Poiché per ipotesi la linea C
ha inizio nel punto P e termine nel punto Q, punti che – come detto sopra – sono infinitamente
vicini, e considerando che il campo elettrico è pari al gradiente del potenziale scalare, si ha:
V E
7
(t )
t
(6.8)
LE EQUAZIONI A POTENZIALE
Fino ad ora, abbiamo considerato problemi assolutamente generali. Adesso iniziamo a fare qualche
ipotesi restrittiva. Ad esempio, per il futuro ci riferiremo soltanto a geometrie di natura cartesiana
(quindi in coordinate x y z, non in coordinate cilindriche ne’ sferiche). Poi prendiamo in esame
materiali lineari, e studiamo problemi nei quali non c’è variazione nel tempo. Per questo tipo di
problemi, cioè per problemi di natura cartesiana, ortogonale, monometrica, destra, con materiali
lineari e per grandezze costanti nel tempo, le equazioni di Maxwell si scrivono:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 11 di 58
E
(7.1)
B 0
(7.2)
B J
(7.3)
E 0
(7.4)
7.1
Il potenziale scalare per il campo elettrostatico
Ora, un teorema fondamentale del calcolo vettoriale dice che: se un vettore ha rotazione nulla,
allora può essere espresso come il gradiente di una funzione scalare. Verifichiamo l’applicazione di
questo teorema al campo elettrico E con una funzione scalare V (x,y,z).
Si ha infatti che il gradiente di una funzione scalare V è un vettore:
V V V
V i
j
k
x
y
z
(7.5)
E la rotazione di questo vettore vale:
i
V
x
V
x
j
y
V
y
k
0
z
V
z
(7.6)
In altri termini: siccome la rotazione del gradiente di una funzione scalare è identicamente nulla,
allora un vettore la cui rotazione è nulla può essere sicuramente espresso come il gradiente di una
funzione scalare. Si può quindi porre:
E V
(7.7)
È assolutamente ovvio che l’equazione (7.7) rimane valida se consideriamo due potenziali V1 e V2
che differiscono per una costante o comunque una funzione che non dipende dalle coordinate
spaziali. Ciò viene comunemente espresso così: “il potenziale è definito a meno di una costante”. Il
che non vuol dire che il potenziale è effettivamente affetto da una costante che noi non conosciamo,
cioè che il potenziale che noi“troviamo” integrando le equazioni differenziali non è quello vero, il
quale invece ha una costante a noi sconosciuta. Vuol dire un’altra cosa: siccome a noi interessa la
derivata del potenziale, allora per noi va bene qualsiasi potenziale che ha quella particolare derivata.
L’equazione (7.2) si riscrive così:
2V 2V 2V
E V 2 2 2
x
y
z
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 12 di 58
(7.8)
2 2 2
viene comunemente denominato “nabla quadro” ed indicato con il
,
,
x 2 y 2 z 2
simbolo 2 . E allora la prima equazione di Maxwell si scrive:
L’operatore
2V
(7.9)
L’equazione (7.9) è chiamata “equazione di Poisson”; la sua controparte omogenea, nella quale è
identicamente nullo, è chiamata “equazione di Laplace”. Ovviamente, ma questo lo discuteremo
dopo, essendo equazioni differenziali qualche ipotesi sulle condizioni iniziali/finali dovrà essere
fatta.
Che cosa ci abbiamo guadagnato, a scrivere una equazione di Maxwell in termini di potenziale
scalare piuttosto che in termini di campo elettrico? Che cosa è cambiato? Ci sono aspetti positivi e
negativi. Vediamoli un po’.
- Positivo: per ogni punto dello spazio c’è una sola incognita, cioè il valore del potenziale. Se
scriviamo le equazioni in termini di campo elettrico, le incognite sono tre.
- Negativo: abbiamo alzato l’ordine di derivazione. Le equazioni di Maxwell presentano
soltanto derivate prime, l’equazione di Poisson/Laplace solo derivate seconde.
- Le equazioni di Poisson/Laplace hanno una connessione strettissima con l’energia
immagazzinata nel campo elettrico / magnetico.
Le due equazioni di Poisson/Laplace sono generalmente definite in geometrie complesse, di natura
3D e solo occasionalmente 2D. Se la geometria non è particolarmente semplice, la soluzione della
(7.9) in forma analitica in termini di potenziale scalare non è proprio possibile, e bisogna ricorrere a
metodi numerici. Di questo problema non ci occuperemo, ma nel campo c’è una letteratura
sterminata. Per problemi elettrici, il testo di riferimento è “Finite Elements for Electrical Engineers”
del grandissimo prof. Peter P. Silvester.
7.2
Il potenziale vettore per il campo magnetostatico
Il campo magnetico non gode delle stesse proprietà del campo elettrico. Come evidente dalle
equazione (7.3), la rotazione del vettore induzione magnetica non è mai zero; se lo fosse, anzi, il
campo magnetico sarebbe ovunque nullo, a meno che non ci sia in giro qualche magnete
permanente. Ma se non c’è corrente, non c’è campo magnetico. E se c’è corrente, c’è densità di
corrente, e quindi il campo non è mai irrotazionale. Come abbiamo dimostrato sopra, un potenziale
scale non è quindi possibile. Però è sempre possibile definire un potenziale vettore:
B A
(7.10)
La posizione (7.10) è sempre possibile, ma non se ne capisce proprio l’utilità. Si parte da un vettore
con tre componenti, e si arriva ad un vettore di tre componenti. Tra l’altro, essendoci di mezzo una
derivazione, qualche problemino sulle costanti aggiuntive bisogna aspettarselo (il noto problema del
gauge, un po’ complicato per discuterlo qui), più complicato peraltro di come lo abbiamo già
incontrato discutendo del potenziale scalare.
Adesso, però, facciamo una ulteriore ipotesi semplificativa: prendiamo in esame problemi
bidimensionali. Problemi nei quali la densità di flusso B ha soltanto due componenti spaziali:
B( x, y) i Bx ( x, y) j By ( x, y)
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 13 di 58
(7.11)
Questo è il caso al quale ci riferiremo con maggior frequenza: ed è un caso nel quale le correnti
sono tutte dirette verso z, e tutti i materiali hanno caratteristiche che dipendono soltanto da x e da y,
cioè:
J ( x, y, z ) k J z ( x, y); ( x, y, z1 ) ( x, y, z2 ), ( z1 , z2 )
(7.12)
In queste condizioni, come si verifica facilmente, il potenziale vettore è un vettore normale al piano
(x,y) e quindi sempre parallelo al vettore densità di corrente. Si ha infatti:
i
A
x
Ax
j
y
Ay
k
A A A A
0 i z j z k y x i Bx j By
y
x
y
x
Az
(7.13)
Perché l’ultima uguaglianza sia vera, condizione sufficiente (e come vedremo presto anche
necessaria) è che le componenti del potenziale vettore sul piano (x,y) siano identicamente nulle.
Di conseguenza, in problemi 2D il potenziale vettore è un vettore del quale si conoscono a priori
due componenti, che hanno valore zero. Quindi il potenziale vettore in 2D è di fatto un potenziale
scalare, con una sola incognita per punto anziché due (le componenti del vettore densità di flusso).
L’espressione analitica del potenziale vettore è quindi la seguente:
A( x, y) k Az ( x, y)
(7.14)
Nel seguito, poiché non ci sarà possibilità di equivoco, ci si riferirà alla componente Az
semplicemente con A.1
Se adesso riscriviamo la (7.3) introducendo al posto del vettore B il vettore A:
B A J
(7.15)
Sviluppando la rotazione all’interno della parentesi quadra:
A A
i z j z J
y
y
(7.16)
E sviluppando la rotazione nella (7.16):
2 A 2 Az
k 2z
J
x 2
y
(7.17)
Che, in accordo con la notazione della (7.9) diventa:
2 Az J z
1
(7.18)
Questa frase non è proprio bellissima, ed in pratica è la traduzione di un modo di dire inglese che, nel caso specifico,
suonerebbe più o meno così. “In the following, Az will be referred at simply as A”. La lingua dello Scuotilancia non
presenta grande musicalità e neppure ha una varietà di tempi e modi verbali comparabile con la nostra: ma talvolta è
molto pratica. Una vera “lingua tecnica”.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 14 di 58
Un altro risultato molto interessante: i problemi bidimensionali magnetostatici sono espressi da una
forma matematica identica ai problemi bidimensionali elettrostatici. La (7.18) rende anche conto del
fatto che, per problemi bidimensionali, l’unica componente possibile per la densità di corrente è
quella in direzione z; se la corrente ha altre componenti, il problema non è pià bidimensionale.
7.3
Il potenziale vettore in 2D ed il flusso di B
Nonostante le definizioni, ancora non è chiaro il motivo che ci ha portato a definire il potenziale
vettore.
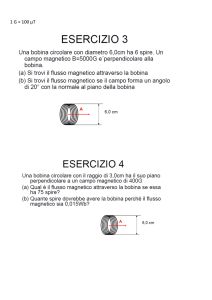
Prendiamo allora in considerazione il problema definito in Fig. 2. Ci troviamo in un campo
bidimensionale descritto dall’equazione (7.11). Da qualche parte, nello spazio, c’è un set di correnti
che generano il campo; ma sono lontane dalla geometria raffigurata nel disegno, e quindi non si
vedono. Nella fig. 2 è disegnata una spira a sezione puntiforme di tipo planare, definita dal contorno
1-2-3-4-1. I punti 1 e 2 hanno le stesse coordinate (xA,yA) ma differenti coordinate z: z1 e z2. Anche i
punti 3 e 4 hanno le stesse coordinate (xB,yB) e anche loro sono a quota z1 e z2. Il nostro obiettivo è
determinare il flusso di B attraverso una qualsiasi superficie S che ha come contorno C la spira che
abbiamo appena definito.
Figura 2 – Una spira a sezione puntiforme nello spazio 3D ed i suoi lati di estremità negli spazi 2D definiti dai piani
z = z1 e z = z2.
Per la definizione di flusso e di potenziale vettore, si ha:
( B, S ) B ndS A ndS
S
(7.15)
S
Applicando il teorema di Stokes:
( B, S ) A ndS A dC
S
(7.16)
C
Per valutare l’ultimo integrale a secondo membro, bisogna definirne il percorso di integrazione.
Facciamo una piccola diversione: attualmente la superficie è definita da un rettangolo nello spazio,
delimitata dai seguenti quattro punti:
punto 1
punto 2
xA, yA, z1
xA, yA, z2
potenziale AA
potenziale AA
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 15 di 58
punto 3
punto 4
xB, yB, z2
xB, yB, z1
potenziale AB
potenziale AB
Possiamo definire altri due punti:
punto 5
punto 6
xB, yA, z2
xB, yA, z1
potenziale AC
potenziale AC
. Adesso definiamo questo solido 3D per mezzo delle sue 5 facce:
faccia 1
bordo C1
il rettangolo definito dai punti (1,2,3,4);
faccia 2
bordo C2
Il triangolo definito dai punti (2, 3, 5)
faccia 3
bordo C3
Il triangolo definito dai punti (1, 4, 6)
faccia 4
bordo C4
Il rettangolo definito dai punti (1, 2, 5, 6)
faccia 5
bordo C5
Il rettangolo definito dai punti (3, 4, 6, 5)
È del tutto ovvio che dalle facce 2 e 3 non deve “uscire” flusso; infatti, il vettore è sempre normale
alla superficie nel punto. Quindi il flusso attraverso la faccia 1 deve essere uguale alla somma dei
flussi attraverso le facce 4 e 5.
Valutiamo quindi questi due flussi effettuando le relative circuitazioni. Queste circuitazioni devono
essere fatte in maniera tale che la normale alla superficie guardi per entrambi le facce o verso
l’interno del solido o verso l’esterno del solido. Perché ciò avvenga, è sufficiente “mettersi” dentro
il solido e guardare le due facce numerando i punti che componengono le facce con la stessa
sequenza la sequenza dei punti nello stesso senso (orario o antiorario). Mettendosi “dentro” il solido
3D e guardando le due facce, numerando i punti in senso orario, si identificano queste sequenze:
faccia 4
faccia 5
sequenza punti 1 – 2 – 5 – 6
sequenza punti 3 – 4 – 6 – 5
bordo C4
bordo C5
2
5
6
1
A dC4 AZ (dz) AX dx AZ dz AX (dx) AA ( z2 z1 ) AC ( z2 z1 )
C4
1
2
5
5
3
4
6
A
d
C
A
(
dz
)
A
dy
A
dz
5
Z
Y Z AY (dy) AC ( z2 z1 ) AB ( z2 z1 )
C5
6
5
3
(7.17.a)
6
(7.17.b)
4
È del tutto ovvio che, in entrambe le formule:
- gli integrali al secondo e quarto posto si annullano, qualsiasi sia l’andamento di Ax e di Ay;
infatti, nel percorso da 5 a 2 e in quello da 1 a 6, il potenziale è esattamente lo stesso, e
poiché gli integrali hanno segno opposto, la loro somma è nulla (lo stesso si può dire per il
percorso da 5 a 3 e da 4 a 6)
- nel primo integrale, il potenziale vettore è costante (non dipende da z) e si può “tirare fuori”
dall’operazione di integrale;
- anche nel terzo integrale, il potenziale vettore è costante (non dipende da z) e si può “tirare
fuori” dall’operazione di integrale.
In definitiva:
( B, C1 ) ( AB AA )( z2 z1 )
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 16 di 58
(7.18)
Il risultato espresso dalla (7.18) è di straordinaria importanza. La differenza tra i valori di potenziale
vettore in due punti è pari al flusso su una superficie che si appoggia su quei due punti.
7.4
Significato fisico del potenziale vettore in 2D
Il risultato espresso dalla (7.18) sarà utilizzato continuamente. Per lo studio delle Macchine
Elettriche, il potenziale magnetico vettore è molto più importante del potenziale elettrostatico
scalare, in quanto, come esprime proprio la (7.18) il potenziale vettore è il flusso.
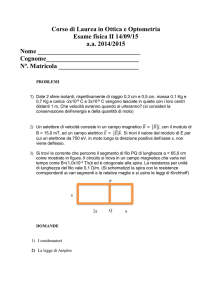
Il significato fisico del potenziale vettore per problemi 2D può essere ulteriormente spiegato come
segue (figura 3):
1. Sul piano z1 è presente una geometria qualsiasi (nella figura 3 è ad esempio rappresentata
una L rovescia, ad esempio il giunto di un trasformatore). Prendiamo in considerazione due
punti: A e B, di coordinate (xA, yA) ed (xB, yB) rispettivamente;
2. Nei punti A e B, il potenziale vettore è appunto un vettore con una sola componente diversa
da zero, quella secondo l’asse z; nei due punti, la z-componente del potenziale vettore vale
rispettivamente AA ed AB;
3. Sul piano z = z2, è presente la stessa geometria presente sul piano z = z1, altrimenti il
problema non sarebbe bidimensionale. Prendiamo in considerazione due altri punti, A’ e B’,
che hanno le stesse coordinate dei punti A e B; inoltre, essendo un problema magnetostatico
2D, e dipendendo il potenziale vettore soltanto dalle coordinate (x, y), in A’ c’è lo stesso
potenziale vettore di A ed in B’ c’è lo stesso potenziale vettore di B;
4. Consideriamo i due segmenti A - A’, B - B’; consideriamo inoltre, sul piano z1, una qualsiasi
curva non intrecciata che congiunge A con B, e sul piano z2 un’altra curva che congiunge A’
con B’. Non è necessario che le due curve siano uguali, o meglio, possono essere non
sovrapponibili; il risultato cercato, come abbiamo dimostrato sopra, non dipende dalle due
curve, purché entrambi siano interamente planari. Nel disegno sono stati utilizzati due
segmenti, ma va ugualmente bene anche un arco di circonferenza o una qualsiasi altra figura
1D, purché planare e non intrecciata;
5. i due segmenti e le due curve formano una superficie 3D;
6. Il flusso nel rettangolo di cui al punto 4. vale ( AB AA )( z2 z1 ) .
Figura 3 – Interpretazione fisica dei valori numerici del potenziale vettore. Per una geometria definita sui piani z =
z1 e z = z2.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 17 di 58
7.5
Le linee equipotenziali di A e le linee di flusso di B.
Mettiamoci adesso, sempre in un piano z generico, in un punto di coordinate (x,y) nel quale il
potenziale vettore ha valore A(x,y). Diciamo meglio: nel punto, la componente normale del
potenziale vettore ha valore A(x,y), mentre il vettore induzione magnetica vale
A A
i Bx j By i z j z . La domanda è: Quanto vale il potenziale vettore in un punto vicino?
y
y
(possibilmente “molto” vicino). Adesso (x,y)
A
A
A( x x, y y) A( x, y )
x
y
(7.19)
x
y
(x,y)
x kBx k
A
A
; y kBy k
y
x
(7.20)
Essendo k una costante moltiplicativa del tutto generica (come vedremo immediatamente, il valore
di k non ci interessa). Con la posizione (7.20), la (7.19) diventa:
A( x x, y y) A( x, y)
A A A
A
k
k
A( x, y )
x y y
x
(7.21)
In pratica: se da un punto qualsiasi mi sposto in direzione parallela al vettore induzione magnetica
nel punto, il valore numerico del potenziale vettore non cambia.
Sul generico piano z, è possibile tracciare il luogo dei punti per i quali A è costante. Ovviamente,
bisogna scegliere il valore di questa costante, ad esempio A1. Questo luogo dei punti è in generale
una curva. Scegliendo due valori, A1 ed A2, si ottengono – ovviamente - due curve, le quali non si
incontrano mai, altrimenti succederebbe che da qualche parte A1 = A2, il che è impossibile. Allora,
in base alla proprietà (7.18), scegliendo due punti qualsiasi sulle due curve in accordo con quanto
fatto nel paragrafo 7.4, il flusso tra quei due punti è costanti. Quindi, in pratica, le due curve
rappresentano dei valori costanti di flusso, e per questo sono generalmente chiamate “linee di
flusso”. In altri termini:
- È possibile tracciare una linea sul piano z generico nella quale il potenziale vettore è
costante e pari ad un valore fissato;
- È possibile tracciare molte linee, ognuna per un differente valore del potenziale vettore;
- Se prendiamo due linee, e scegliamo due punti su di esse (A e B), il flusso sulla superficie
(A – A’ – B’ – B) è costante.
A B Figura 4 – Una soluzione numerica per un problema di campo magnetico 2D interpretata con linee
equipotenziali.
8
DISTRIBUZIONI DI B PER GEOMETRIE SEMPLICI
L’espressione analitica della distribuzione di campo magnetico è di solito impossibile a
determinarsi, essendo legata a operazioni di prodotto-vettore ed integrali che sono molto difficile a
farsi in forma analitica se non in condizioni di geometrie particolarmente semplici. Nel nostro caso,
però, almeno due distribuzioni analitiche di campo magnetico ci sono assolutamente necessarie:
quella relativa ad un conduttore indefinitamente lungo e quella relativa al campo al centro di una
circonferenza.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 18 di 58
La base di partenza per questa analisi è l’espressione della prima formula di Laplace, che fornisce il
valore del campo dB generato da un elemento di conduttore di lunghezza dl nel quale scorre una
corrente I, in un punto P a distanza r dall’elemento di conduttore:
0 dl r
dB
I
4
r3
8.1
(8.1)
L’ induzione magnetica dovuta ad un conduttore di lunghezza infinita
Consideriamo un filo conduttore di lunghezza indefinita, e determiniamo il campo magnetico in un
punto P a distanza R dal conduttore, che è percorso da una corrente I; il conduttore sia parallelo
all’asse z (figura 5). In un punto generico dell’asse z, sia r il vettore che congiunge questo punto ed
il punto P. Il campo magnetico è normale al piano individuato dall’asse z e da r , quindi è parallelo
all’asse delle , e vale (effettuando il prodotto vettore indicato nella 8.1, che nel caso in esame vale
dz r ):
sin ( z )
B( P) 0 I 2
dz
4 r ( z )
(8.2)
Figura 5 – La geometria per il calcolo del campo magnetico dovuto ad un conduttore di lunghezza infinita
Si ha inoltre:
R
sin( ( z ))
R
R
z
; dz
d
tan
sin 2
r ( z)
(8.3)
(8.4)
Tenendo conto delle (8.3) ed (8.4), la (8.2) si trasforma nella
I
I
B( P) 0 sin 2 d 0 B( R)
4 R 0
2R
(8.5)
L’ultima uguaglianza ha il senso di indicare che il vettore induzione magnetica ha lo stesso modulo
in tutti i punti di ogni circonferenza centrata nel conduttore e di raggio R, e ha sempre direzione
secondo l’asse .
8.2
L’induzione magnetica per una spira circolare
Limitiamoci a determinare il valore dell’induzione magnetica nell’asse della spira, che è contenuta
interamente nel piano (x, y), ha il suo centro di simmetria in (0,0), ha raggio R ed asse disposto
lungo l’asse z.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 19 di 58
Figura 6 – La geometria per il calcolo del campo magnetico dovuto ad una spira circolare
Ogni tatto elementare della circonferenza che costituisce la spira Rd produce un’induzione
elementare espressa sempre dalla (8.1). Se il punto di riferimento P si trova sull’asse z,
considerando due ds sulla spira simmetrici, cioè a distanza angolare di , è del tutto evidente che i
due contributi al campo assiale si sommano, ma i contributi radiali si elidono. Si ha quindi:
dBz
0 ds
I cos
4 r 2
(8.6)
Si ha inoltre:
r R2 z 2
R
cos
r
(8.7)
(8.8)
La (8.6) può quindi essere riscritta:
dBz
0
Rds
I
2
4 R z 2 3 / 2
(8.9)
Ricordando che ds = R d, ed integrando rispetto a tra gli estremi 0 e 2, si ottiene:
Bz
0
2
I
R
R2
2
z2
3/ 2
(8.10)
In particolare, al centro della spira (z = 0):
Bz
9
0 I
2R
(8.11)
FLUSSO CONCATENATO CON UNA SPIRA MASSICCIA
(cioè la cui area trasversale, in cui passa la corrente, ha sezione non puntiforme)
Consideriamo adesso una spira di sezione non trascurabile, ad esempio a sezione quadrata. Quanto
detto fino ad ora non è più applicabile, in quanto non è più possibile definire la linea C e la
superficie ; tutte le considerazioni sinora svolte non trovano più applicabilità. È d’altronde ben
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 20 di 58
evidente che l’esperienza rivela come ai capi della spira massiccia sia in generale presente una
tensione diversa da zero (sempre che nello spazio esista una variazione del tempo della densità di
flusso di induzione magnetica).
Come è possibile però inquadrare questa osservazione nel fenomeno dell’induzione
elettromagnetica?
Figura 7 - Una spira massiccia
Si prendano inizialmente in considerazione due spire, entrambe puntiformi, collegate ai loro estremi
in parallelo. Tali spire siano identificate da estremi identificati da a e b per la prima spira, e c e d
per la seconda spira (Fig. 8).
a b
c d
Figura 8 - Due spire planari a sezione trasversale puntiforme
Poiché ognuna delle due spire si trova nelle condizioni di applicabilità del teorema di FaradayNeumann-Lenz, per ognuna delle due spire (considerata separata dall’altra) si ha:
v1 (t )
d1
d
; v2 (t ) 2
dt
dt
(9.1)
Di ognuna delle due spire, per quanto detto, si può fare un circuito equivalente: una tensione (data
dalla (9.1)) in serie con una resistenza di valore assegnato.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 21 di 58
Se le due spire vengono poste in parallelo, collegando i punti a e c ed i punti b e d, il teorema di
Faraday non può essere più applicato; però si possono mettere in parallelo i due circuiti equivalenti
delle due spire, arrivando al circuito equivalente mostrato in Fig. 9.
R
R
(a = c)
v
e 12
e 34
(b = d)
Figura 9 - Il circuito equivalente delle due spire a sezione puntiforme in parallelo.
Il circuito equivalente può essere modificato applicando il teorema di Norton ad entrambe le spire,
arrivando al circuito equivalente di Fig. 10.
(a = c)
e
12
R
R
e
v
R
34
R
(b = d)
Figura 10 - Il circuito equivalente trasformato delle due spire in parallelo.
La tensione tra i punti A e B è data da:
v
v R R
v AB 1 2 1 2
R1 R2 R1 R2
(9.2)
Se si ipotizza che le due resistenze siano uguali si ottiene:
v v2
v AB 1
2
(9.3)
In pratica, la tensione ai capi del parallelo è pari al valor medio delle tensioni indotte nelle due
spire.
Nel caso di un numero Np di spire connesse in parallelo:
v AB
1
Np
Np
v
i 1
i
(9.4)
Si supponga ora che la sezione trasversale della spira massiccia sia suddivisa in un numero molto
elevato di spire, connesse in parallelo alle estremità. Se il numero di spire tende all’infinito, ferma
restando la sezione trasversale della spira S, si ha:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 22 di 58
v AB
1
lim
N p N
p
Np
v
i 1
i
(9.5)
Moltiplicando e dividendo per il valore della sezione trasversale S:
N
v AB
p
1
S
lim vi
S N p i 1 N p
(9.6)
Il termine a secondo membro (il limite di una somma integrale) è proprio l’integrale
dell’argomento. Si ha quindi, in definitiva:
v AB
1
vdS
S
S
(9.7)
Ricordando che la tensione in una spira a sezione puntiforme è la derivata del flusso di induzione:
v AB
1
S
d
dt dS
(9.8)
S
e commutando gli operatori di integrazione spaziale e di derivazione temporale:
v AB
d 1
dS
dt S
S
(9.9)
Il termine tra parentesi quadre a secondo membro è dimensionalmente un flusso; la tensione ai capi
dell’avvolgimento è la derivata temporale di questo flusso. Convenzionalmente, questo flusso viene
definito concatenato. lI flusso del vettore B è legato ad una superficie, o meglio ad una linea chiusa;
il flusso concatenato è legato ad un avvolgimento, o più esattamente ai terminali dell’avvolgimento.
Nel seguito, il flusso concatenato verrà indicato con la lettera , al fine di effettuare una distinzione
anche simbolica rispetto al flusso di induzione magnetica .
v AB
d
dt
(9.10)
10 ENERGIA NEL CAMPO MAGNETICO
Prendiamo in esame il solito sistema fisico. Un generatore di tensione v(t) alimenta un conduttore il
quale è avvolto a formare N spire intorno ad un toro di sezione circolare di area S. La linea media
del toro abbia lunghezza l, pari ad un raggio medio rmed; il raggio minimo del toro sia rmin ed il
raggio massimo sia rmax, e queste due grandezze siano praticamente uguali (il che equivale ad
affermare che il raggio medio del toro è molto più grande del raggio della sezione). La geometria di
riferimento è in pratica quella di Figura 1.
Il toro sia costruito con una materiale magnetico con una caratteristica magnetica B-H non
necessariamente lineare, ma sicuramente con curvatura a segno costante e comunque crescente. Una
possibile caratteristica B – H è riportata in Fig. 11.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 23 di 58
Figura 11 – Una caratteristica di magnetizzazione B-H per un materiale ferromagnetico. La curva 1 è una
caratteristica non lineare, la curva 2 è lineare. Entrambe le curve sono ad un sol valore e sono
invertibili, nel senso che è possibile rappresentare H in funzione di B o viceversa..
L’equazione del circuito elettrico è:
(10.1)
in cui v(t) rappresenta la tensione del generatore, i(t) è la corrente nel circuito, e
è il flusso
concatenato con l’avvolgimento. In prima approssimazione, si può supporre che il flusso del vettore
induzione magnetica sia lo stesso in ogni sezione del toro; di conseguenza, il flusso concatenato può
essere espresso in funzione di questa grandezza:
(10.2)
D’altronde, il flusso di B può essere scritto in funzione dell’induzione e della sezione:
(10.3)
L’equazione elettrica diviene allora:
(10.4)
Moltiplicando ambo i membri per la quantità i dt:
(10.5)
L’applicazione della legge di Hopkinsons sui circuiti magnetici permette di esprimere la corrente in
funzione del campo magnetico:
(10.6)
per cui la precedente diviene:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 24 di 58
(10.7)
Il prodotto S l è pari al volume del toro.
Integrando tra l’istante iniziale 0 ed un istante finale generico T:
(10.8)
L’integrale a primo membro rappresenta ovviamente la quantità di energia elettrica scambiata con il
generatore. A secondo membro, il primo integrale rappresenta l’energia dissipata nell’avvolgimento
per effetto Joule, il secondo integrale rappresenta la variazione di energia immagazzinata nel campo
magnetico.
Quest’ultimo integrale può essere calcolato per sostituzione. Si ponga come nuova variabile
differenziando:
Al limite inferiore (t = 0), la variabile b assume il valore B(0) = B(t=0); al limite superiore, la
nuova variabile assume il valore B(T) = B(t=T). La sostituzione è possibile se la funzione H(t) è
conosciuta in funzione della nuova variabile, se cioè è conosciuta la dipendenza funzionale H(B(t)).
Ma questa è proprio la relazione funzionale che è espressa dalla caratteristica di magnetizzazione BH.
Si ha perciò:
(10.9)
L’integrale a secondo membro è banalmente l’area compresa tra la curva di magnetizzazione (tra i
punti B(0) e B(T)) e l’asse delle B. Ritornando all’espressione precedente, gli integrali
rappresentano il valore dell’energia specifica immagazzinata nel campo magnetico (per unità di
volume). Riassumendo, si ha perciò:
(10.10)
Se il materiale è lineare, se cioè la curva di magnetizzazione può essere espressa come una retta, del
tipo B = H con costante, la precedente si riduce alla ben nota espressione:
(10.11)
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 25 di 58
che corrisponde all’area del triangolo sotteso tra la retta di magnetizzazione e l’asse delle B.
Se passiamo all’energia magnetica totale, quella cioè immagazzinata in tutto il circuito magnetico (e
quindi in tutto il volume nel quale l’induzione magnetica è diversa da zero), questa grandezza può
essere scritta in parecchie forme:
(10.12)
Questo risultato è del tutto generale, e ci ricorda che l’energia immagazzinata in un campo
magnetico è proporzionale al prodotto tra il flusso concatenato e la corrente, ma può essere espressa
anche come prodotto tra l’induttanza e la corrente al quadrato.
11 RELAZIONI CAUSA-EFFETTO TRA FLUSSO CONCATENATO E
TENSIONI/CORRENTI
È comunque ovvio che la presenza di un flusso concatenato è legata alla presenza di un campo di
induzione magnetica variabile nel tempo. A sua volta, la presenza di una induzione magnetica (e
quindi di un flusso concatenato con la spira) può essere dovuta a:
- una corrente che fluisce nella spira;
- una corrente che fluisce in un’altra spira;
- la presenza di un magnete permanente;
oppure ad una combinazione di queste cause. Come evidente dalla legge di Ampere e comunque
dalle equazioni di Maxwell, per problemi lineari il vettore densità di flusso magnetico è
proporzionale alla corrente che lo genera: raddoppiando la corrente, raddoppia punto per punto il
vettore B. Raddoppiando questo, raddoppia qualsiasi flusso di questo vettore e in definitiva
qualsiasi flusso concatenato. Di conseguenza, il flusso concatenato è proporzionale alla corrente che
lo ha generato.
Il coefficiente di proporzionalità tra flusso concatenato e corrente viene chiamato induttanza. Se la
corrente fluisce nello stesso avvolgimento nel quale viene valutato il flusso concatenato si parla di
auto induttanza L; se invece il flusso concatenato con la spira dipende dal fatto che scorre corrente
in un’altra spira, si parla di mutua induttanza M. In generale, quindi, il flusso concatenato è
contraddistinto da due pedici: flusso “concatenato con” e “dovuto alla corrente in”. Ad esempio, in
presenza di due spire contraddistinte dagli indici 1 e 2, si ha:
11 Li1
12 Mi2
(11.1)
Il primo termine può essere letto come “flusso concatenato con 1 dovuto alla corrente in 1”; il
secondo “flusso concatenato con 1 dovuto alla corrente in 2”.
In generale, per il teorema di Ohm generalizzato, la tensione ai capi di un avvolgimento è dovuta
alla somma delle forze elettromotrici indotte. Se si prendono in considerazione due avvolgimenti
mutuamente accoppiati, si definisce un componente chiamato appunto induttori mutuamente
accoppiati. Si tratta di un componente con quattro terminali, che però non possono essere collegati
in qualsiasi modo, ma soltanto a due a due, ognuna delle due coppie essendo vincolata dalla
continuità fisica dell’avvolgimento. Si tratta quindi non di un quadripolo ma di un doppio bipolo, o,
meglio, di una rete biporta. Le equazioni di questa rete sono:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 26 di 58
d 11 d 12
dt
dt
d 22 d 21
v2
dt
dt
v1
(11.2)
A loro volta, i flussi concatenati possono cambiare nel tempo per due motivi:
1.
2.
le spire rimangono immobili, e c’è una variazione della corrente nella spira “causa”;
non c’è variazione di corrente nella spira, ma la posizione relativa tra spira ”causa” e spira
“effetto” cambia nel tempo.
Ovviamente, i fenomeni di auto induzione possono essere dovuti soltanto ad una causa di tipo 1.; i
fenomeni di mutua induzione possono invece essere dovuti ad entrambe le cause. In generale,
differenziando ad esempio la prima delle (11.1) si ha:
v
d
di
dL
L i
dt
dt
dt
(11.3)
Le due forme di forza elettromotrice vanno sotto il nome rispettivamente di “trasformatorica” e
“rotazionale”.
12 ENERGIA NEGLI INDUTTORI
12.1 Problemi lineari
Prendiamo in esame un avvolgimento accessibile da due punti. Supponiamo che, all’interno dello
spazio nel quale opera tale dispositivo, siano presenti solamente fenomeni di natura magnetica, e
siano quindi assenti fenomeni dissipativi, capacitivi, termici o radiativi. Il dispositivo è allora
chiamato comunemente “induttore”, ed il suo comportamento esterno è descritto completamente
dall’equazione differenziale:
v(t )
d (t )
dt
(12.1)
= L i
(12.2)
Ipotizziamo che sia
con L costante per qualsiasi coppia di valori di i e . Moltiplicando ambo i membri per i dt si ha:
v(t )i(t )dt
d (t )
i(t )dt
dt
(12.3)
Per il primo principio della termodinamica, il primo membro rappresenta l’energia elettrica
scambiata dall’induttore con il circuito esterno; il secondo membro è invece pari alla variazione di
energia magnetica immagazzinata nell’induttore.
Integrando tra il tempo t = 0 ed il tempo t = T, si ha:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 27 di 58
T
T
0
0
di
vidt L i dt dt
(12.4)
Di conseguenza, la variazione dell’energia magnetica immagazzinata nell’induttore tra il tempo t =
0 ed il tempo t = T è pari alla grandezza a secondo membro.
L’integrale temporale a secondo membro può essere valutato per parti. Nell’integrazione definita si
ha:
b
b
f ( x) g ' ( x)dx f (b) g (b) f (a) g (a) f ' ( x) g ( x)dx
a
(12.5)
a
Ponendo a = 0, b = T, x = t, f(x) = i(t), g’(x) = di/dt, si ottiene che f’(x) = di/dt e g(x) = i(t).
Sostituendo:
T
T
di
di
2
2
0 i dt dt i (T ) i (0) 0 dt idt
(12.6)
Raggruppando:
T
2 i
0
di
dt i 2 (T ) i 2 (0)
dt
(12.7)
Di conseguenza, , la variazione dell’energia magnetica immagazzinata nell’induttore tra il tempo t
= 0 ed il tempo t = T è pari a:
Wmagn
1 2
1
Li (T ) Li 2 (0)
2
2
(12.8)
La precedente equazione rivela che – almeno negli induttori lineari - esiste un legame profondo tra
il flusso concatenato e l’energia magnetica.
Ma è importante notare che l’energia magnetica è una funzione di stato. Dipende soltanto dal valore
della corrente, e non da come la corrente è arrivata a quel valore. Questa conclusione è
fondamentale, ha validità del tutto generale ed avrà una importanza fondamentale nella deduzione
di un modello agli elementi finiti del campo magnetico basato sulla formulazione di Raleygh-Ritz
(la stazionarietà di un funzionale legato all’energia).
12.2 Problemi non lineari
Nei casi non lineari, il problema si complica notevolmente. L’equazione dell’induttore diventa
infatti:
v(t ) L
di
dL
i
dt
dt
(12.9)
in quanto, ovviamente, il valore del rapporto tra flusso concatenato e corrente non è costante, ma
varia nel tempo. In realtà, però, l’induttanza dipende dal tempo rigorosamente per il tramite della
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 28 di 58
corrente. In altri termini: indipendentemente dal valore di t, il valore di L è conosciuto se è
conosciuto il valore di i. Questo fatto è molto importante, per quanto vedremo tra poco.
Effettuando le stesse operazioni algebriche e differenziali effettuate nel caso lineare, si ottiene:
T
Wmagn
T
T
di
dL
vidt Li dt i 2
dt
dt
dt
0
0
0
(12.10)
Avendo supposto che l’induttanza L dipenda soltanto da i, è possibile sviluppare l’induttanza stessa
in serie di potenze della corrente, ponendo:
L(i) L0 Lk i k
(12.11)
k 1
(si ricorda che la serie di potenze è una serie completa di funzioni, per cui la posizione precedente è
sicuramente esatta dal punto di vista analitico. Da un punto di vista numerico è tutta un’altra cosa,
ma ne parliamo in seguito).
Sostituendo questo valore nella precedente, e ponendo dL/dt = dL/di di/dt, si ottiene:
T
Wmagn L0 i
0
di
di
di
dt Lk i k 1 dt kLk i 2 i k 1 dt
dt
dt
dt
k 1
k 1
0
0
(12.12)
di
di
dt (k 1) Lk i k 1 dt
dt
dt
k 1
0
(12.13)
T
T
che può essere riscritta come:
T
Wmagn L0 i
0
T
Il primo termine a secondo membro non è altro che la variazione dell’energia magnetica
immagazzinata nell’induttore lineare di valore costante L0. Il secondo termine a secondo membro è
invece il contributo della non linearità. Procedendo come prima, integrando per parti, si ha:
T
k 1
i
0
T
di
dt i k 2 (T ) i k 2 (0) (k 1) i k idt
dt
0
(12.14)
D’altronde, l’integrale a secondo membro vale:
T
i
0
k
idt
1
i k 2 (T ) i k 2 (0)
k 2
(12.15)
In definitiva, l’energia magnetica immagazzinata in un induttore non lineare ha l’espressione:
(k 1) 2
Lk i k 2 (T ) i k 2 (0)
k
2
k 1
Wmagn ( L) Wmagn ( L0 )
(12.16)
La precedente non ha un significato operativo ed in generale non può essere utilizzata per il calcolo
dell’energia magnetica immagazzinata in un induttore non lineare. Questo perché lo sviluppo in
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 29 di 58
serie di potenze dell’induttanza è in generale molto poco accurato se effettuato in aritmetica
computazionale con un numero finito di cifre significative. Basti ricordare che la determinazione
numerica di N coefficienti Lk richiede l’inversione di una matrice di Vandermonde di ordine N,
operazione di fatto impossibile dal punto di vista numerico per N maggiore di tre o quattro.
Comunque, la precedente ha un grande significato dal punto di vista teorico. Dalla precedente si
deduce infatti che, dato il valore della corrente e dati i valori dei coefficienti della serie di potenze,
l’energia magnetica è una funzione di stato nello spazio definito da quelle grandezze. In altri
termini, l’energia magnetica non dipende da “come” la corrente arriva alla quantità i(T), ma da
“quanto” vale quella quantità. L’energia magnetica in problemi non lineari non dipende quindi dalla
storia della corrente, dal modo in cui la corrente è arrivata a quel valore, ma soltanto dal valore
stesso. Come nel caso lineare, questo risultato sarà di fondamentale importanza nell’analisi
numerica agli elementi finiti di problemi non lineari.
13 INDUTTORI MUTUAMENTE ACCOPPIATI
Come si è visto in precedenza, il flusso concatenato è una grandezza strettamente legata ad un
avvolgimento; ha un rapporto di causa-effetto molto chiaro con la tensione.
Prendiamo adesso in considerazione un problema nel quale sono presenti due avvolgimenti.
Supponiamo per il momento che il problema sia di tipo lineare. Consideriamo adesso il flusso
concatenato con il primo dei due avvolgimenti. Questo flusso concatenato può essere considerato
come la somma di due flussi concatenati: il primo è l’effetto dovuto alla causa i1, cioè la corrente
che fluisce nell’avvolgimento 1, mentre il secondo è l’effetto dovuto alla causa i2, cioè la corrente
che fluisce nell’avvolgimento 2.
I due flussi concatenati possono quindi essere scritti come:
1 (t ) 11 (t ) 12 (t ) L11i1 (t ) L12i2 (t )
(13.1)
Come detto sopra, i due coefficienti di induzione che compaiono nella (13.1) sono relativi a due
fenomeni differenti: il primo è dovuto alla relazione causa-effetto: corrente nell’avvolgimento 1 –
flusso concatenato con l’avvolgimento 1; il secondo è relativo alla relazione causa-effetto: corrente
nell’avvolgimento 2 – flusso concatenato con l’avvolgimento 1.
È ovvio che, nel caso di un problema nel quale sono presenti N induttori mutuamente accoppiati, il
flusso concatenato con uno qualsiasi degli avvolgimenti è legato a tutte le correnti che fluiscono in
tutti gli avvolgimenti. La relazione causa-effetto: correnti negli avvolgimenti, flussi concatenati con
l’avvolgimento i –esimo può essere scritto:
N
N
k 1
k 1
i (t ) ik (t ) Lik ik (t ); i 1, N
(13.2)
Tradizionalmente, quando gli indici i e k sono uguali, quando cioè si valuta l’influenza della
corrente che fluisce nell’avvolgimento i sul flusso concatenato con lo stesso avvolgimento i, il
coefficiente viene chiamato di auto-induttanza, e viene indicato con la lettera L (e quasi sempre
viene indicato con un solo pedice anziché con due), se invece i e k sono differenti, il coefficiente
prende il nome di mutua induttanza, e viene indicato con la lettera M.
Ritorniamo adesso al caso di due soli avvolgimenti, lineari e stazionari. Le due equazioni elettriche
possono essere scritte:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 30 di 58
d 1 (t )
di
di
L1 1 M 12 2
dt
dt
dt
d 2 (t )
di
di
v 2 (t )
L2 2 M 21 1
dt
dt
dt
v1 (t )
(13.3)
è possibile dimostrare che i due coefficienti M sono uguali. In altri termini, M12 = M21. Questo fatto
non è ne’ elementare ne’ evidente, e deve essere dimostrato. Per semplificare la lettura, la
dimostrazione viene data nell’Appendice 1 a questo capitolo.
Se vogliamo calcolare l’energia magnetica immagazzinata negli induttori mutuamente accoppati, la
metodologia è del tutto simile a quanto sviluppato per il singolo induttore. Moltiplicando la prima
delle (13.3) per i1 dt, la seconda per i2 dt, e poi sommando, si ha:
1. a primo membro l’energia elettrica scambiata dal complesso dei due avvolgimenti con il
campo elettrico esterno;
2. a secondo membro la variazione dell’energia magnetica immagazzinata nel complesso dei
due induttori.
v1i1 dt L1i1 di1 M 12i1 di2
v2 i2 dt L2 i2 di2 M 12i2 di1
(13.4)
Nella (13.4) si è già sfruttato il fatto che le mutue induttanze “sono uguali”, cioè che M12 = M21.
Effettuando le necessarie integrazioni nel tempo, ormai familiari, si deduce che l’energia
immagazzinata nel sistema magnetico in esame è dato da:
T
Wmagn ( L1 , L2 , M 12 ) Wmagn ( L1 ) Wmagn ( L2 ) M 12 d (i1i2 )
(13.5)
o
Supponendo che nell’istante iniziale tutte le correnti fossero zero, l’energia magnetica può essere
scritta convenzionalmente come:
1
1
Wmagn ( L1 , L2 , M 12 ) L1i12 L2 i22 M 12i1i2
2
2
(13.6)
É del tutto evidente che, se le due mutue induttanze non fossero uguali, l’energia non sarebbe una
funzione di stato. La Fig. 12 mostra la rappresentazione schematica del componente “induttori
mutuamente accoppiati”.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 31 di 58
i1(t)
i2(t)
v1(t)
v2(t)
Figura 12 - Il componente “induttori mutuamente accoppiati”
14 IL SEGNO DELLA MUTUA INDUTTANZA
Come abbiamo detto, il coefficiente di mutua induttanza è legato all’effetto della corrente in un
avvolgimento sul flusso concatenato con un altro avvolgimento, e quindi sul valore della tensione
indotta. Come abbiamo visto in precedenza, una corrente positiva nell’avvolgimento i non può che
produrre un flusso positivo ai morsetti dell’avvolgimento i, e quindi una tensione positiva agli stessi
morsetti. Ora, è possibile scegliere un verso positivo in un altro avvolgimento, che produce un
flusso concatenato di segno opposto a quello autoindotto, e quindi una tensione mutuamente indotta
di segno opposto a quello autoindotta. In questo caso, nelle equazioni (13.3) il segno da attribuire ai
termini rappresentativi della mutua induttanza è negativo. È importante notare che non è il
coefficiente di mutua induttanza a presentare un valore negativo; semplicemente, la mutua
induttanza entra nel conto dei flussi concatenati (e quindi delle tensioni) con valori negativi.
15 IL COMPONENTE TRASFORMATORE IDEALE
Le equazioni (13.3) sono del tutto generali e rappresentano il comportamento elettromagnetico di
due bipoli di tipo induttivo accoppiati per il tramite del campo magnetico. Queste equazioni
rappresentano quindi il legale elementare intercorrente tra l’energia elettrica e l’energia magnetica.
Si prendano ora in considerazione due circuiti elettrici separati, accessibili ognuno tramite una
coppia di morsetti, avvolti sullo stesso nucleo magnetico. Questi sia di forma toroidale, con
permeabilità magnetica molto più elevata di quella dell’aria. Se il primo avvolgimento è formato da
N1 spire ed il secondo è formato da N2 spire, per i parametri induttivi si ha:
L1
N12
N2
NN
; L2 2 ; M k 1 2
(15.1)
Nelle (15.1), rappresenta la riluttanza del circuito magnetico, e k il coefficiente di
accoppiamento tra i due avvolgimenti; in pratica questo coefficiente può essere definito come:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 32 di 58
11
k
N1
21
22
N2
N2
(15.2)
12
N1
e rappresenta quindi il rapporto tra il flusso concatenato medio autoindotto nell’avvolgimento 1 ed
il flusso concatenato medio mutuamente indotto nell’avvolgimento 2 (oppure il viceversa, come
ovvio). È ugualmente ovvio che il valore massimo di questo coefficiente è 1, valore che si ottiene
soltanto in caso di concatenamento perfetto.
Per semplicità di notazione, nel seguito si porrà d/dt = s. Di conseguenza, le (13.4) possono essere
riscritte:
v1 sL1i1 sMi2
(15.3)
v 2 sMi1 sL2 i2
Dalla seconda delle (15.3) è possibile ricavare il valore della corrente i2 in funzione della corrente
i1 .
v1 sL1i1 sMi2
i2
v 2 sMi1
sL2
(15.4)
Sostituendo la seconda delle (15.4) nella prima:
L1 L2 M 2
v 2 sMi1 M
v1 sL1i1 sM
v 2 s
sL2
L2
L2
v sMi1
i2 2
sL2
i1
(15.5)
Le (15.5) sono del tutto generali e non possono essere ulteriormente semplificate. È però
interessante analizzare come la situazione elettromagnetica viene a modificarsi sulla base di due
differenti ipotesi:
1. i due avvolgimenti presentano un accoppiamento perfetto;
2. la riluttanza del circuito magnetico tende a zero.
1. In questo caso il termine tra parentesi nella prima riga delle (15.5) vale zero, e di
conseguenza il rapporto tra la v1 e la v2 è un rapporto non più differenziale ma puramente
algebrico, pari al rapporto tra la M e la L2; nel caso in esame, però, poiché il coefficiente di
accoppiamento è pari all’unità, questo rapporto è anche pari al rapporto tra il numero di
spire dei due avvolgimenti N1 / N2. Questo indipendentemente dall’andamento temporale
della v1; in ogni caso, la v2 è semplicemente proporzionale secondo il rapporto spire.
2. In questo caso, le tre induttanze tendono all’infinito, pur rimanendo costanti i loro rapporti.
Dalla seconda delle (15.5) si deduce immediatamente che il rapporto tra la i2 e la i1 è
anch’esso non più differenziale ma puramente algebrico, pari stavolta all’opposto del
rapporto tra la M e la L2 e quindi pari a - N1 / N2 .
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 33 di 58
Riassumendo: per due induttori mutuamente accoppiati, con accoppiamento perfetto e con riluttanza
nulla del circuito magnetico, si hanno le seguenti equazioni descrittive:
v1
N1
v2
N2
(15.6)
N
i1 2 i2
N1
Un componente di questo tipo è definito trasformatore ideale. È importante ricordare che le
equazioni sopra dedotte sono relative a grandezze temporali, cioè a grandezze dipendenti dal tempo.
Se si trasformano secondo Laplace o Fourier queste equazioni, le relazioni funzionali rimangono
comunque algebriche. In altre parole, le equazioni (15.6) rimangono uguali anche per i fasori.
I1
k
I2
t
V
2
V
1
Fig. 13 – Il componente trasformatore ideale
La Fig. 13 rappresenta il simbolo circuitale del trasformatore ideale, insieme con le grandezze
elettriche rappresentative. Il rapporto tra le tensioni dei due avvolgimenti è comunemente definito
rapporto di trasformazione ed indicato con il simbolo k oppure kt.
La potenza elettrica in ingresso al trasformatore ideale dal lato 1 è pari a v1 i1, mentre quella dal lato
2 vale -v2 i2. È del tutto evidente che si tratta di potenze istantanee; effettuando il prodotto membro
a membro delle (15.6) è ugualmente evidente che il bilancio netto di energia è pari a zero istante per
istante. In altri termini, la potenza elettrica può “entrare” nel trasformatore da ognuna delle due
porte, ma ne esce istantaneamente tutta dall’altra parte.
16 DEDUZIONE DEL CIRCUITO EQUIVALENTE DEL TRASFORMATORE
MONOFASE
Il trasformatore monofase e' un componente a due porte, schematizzabile come due circuiti
mutuamente accoppiati ad accoppiamento non perfetto.
I1
I2
M
V
1
L1
L
2
V
2
Figura 14 - Schematizzazione circuitale del comportamento magnetico del trasformatore monofase.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 34 di 58
Per il circuito in Fig. 14 valgono le seguenti relazioni:
V1 sL1I1 sMI 2
(16.1)
V2 sMI1 sL2 I 2
in cui s e' l'operatore di Laplace: s = d/dt.
Il circuito equivalente convenzionale del trasformatore monofase e' riportato in Fig. 15.
La
I1
Lb
I
2
kt
Lc
V
1
V
2
Figura 15 - Circuito equivalente convenzionale a T del trasformatore monofase.
Come sopra dedotto, per il componente ideale trasformatore ideale verranno ipotizzate le seguenti
equazioni descrittive:
Vr ktVl
Ir
Il
kt
secondo le convenzioni di segno indicate in figura.
Il
k
Ir
t
V
r
V
l
Figura 16 - Convenzioni di segno per tensioni e correnti del trasformatore ideale
Per il circuito in Fig. 15 e' quindi possibile scrivere le seguenti relazioni:
V1 sLa I1 sLc ( I1
I2
)
kt
I
I
ktV2 sLb ( 2 ) sLc ( I1 2 )
kt
kt
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 35 di 58
(16.2)
che possono essere riscritte nella forma:
V1 s( La Lc ) I1 s
Lc
I2
kt
(16.2.a)
L
L L
V2 s c I1 s b 2 c I 2
kt
kt
Perché il circuito in Fig. 15 sia equivalente a quello in Fig. 14 è necessario e sufficiente che siano
verificate le seguenti relazioni:
L1 La Lc
L2
Lb Lc
kt2
M
Lc
kt
(16.3)
Le Eq. (16.3) mostrano che, dati i valori numerici di L1, L2 ed M, non e' possibile determinare i
valori numerici di La , Lb , Lc , kt: infatti le equazioni di congruenza sono tre, mentre quattro sono i
parametri da determinare. Peraltro, assegnando un valore numerico diverso da zero a kt e' possibile
determinare i valori numerici dei parametri induttivi del circuito di Fig. 14:
La L1 kt M
Lb kt kt L2 M
Lc kt M
(16.4)
Di conseguenza, il circuito equivalente del trasformatore non e' unico: per una data struttura
magnetica e' possibile determinare infiniti circuiti equivalenti del tipo indicato in Fig. 14, uno per
ogni valore di kt .
Viceversa, ipotizzando un circuito equivalente non a T ma ad L (Fig. 17), il circuito è unico, nel
senso che, assegnati i parametri del circuito in Fig. 14, sono univocamente determinati i parametri
del circuito equivalente ad L ipotizzato.
La
I1
I2
kt
V
1
Lc
V
2
Figura 17 - Uno dei due circuiti equivalenti ad L del trasformatore monofase.
Le relazioni che legano i parametri nel circuito in Fig. 17 e quelli nel circuito in Fig. 14 possono
essere ottenute dalle Eq. (16.3), in cui si sia posto Lb = 0 :
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 36 di 58
L1L2 M 2
M
M2
Lc
L2
M
kt
L2
La
Considerazioni del tutto analoghe possono essere fatte per l'altra topologia convenzionale del
circuito equivalente ad L. In questo caso, ponendo La = 0 si ottiene:
L1L2 M 2
M2
Lc L1
L
kt 1
M
Lb L1
17 IL CIRCUITO EQUIVALENTE CLASSICO
Nella letteratura tecnica più datata, il trasformatore viene di solito modellato con un circuito
equivalente a T. Questo circuito equivalente, come dimostrato sopra, è determinato soltanto a meno
di un parametro numerico. Cambiando la scelta di questo parametro, tutti i valori numerici degli
altri parametri cambiano. Quindi i valori numerici di tutti i parametri sono intrinsecamente a scelta
dell’utente. Da un punto di vista scientifico, questo approccio è molto poco significativo.
Di solito, le argomentazioni che conducono a questo circuito sono quanto meno discutibili. La
confusione più comune e quella tra “flusso del vettore induzione magnetica” e “flusso concatenato”.
C’è chi parla di “flusso principale” e di “flusso disperso”. C’è chi utilizza i principi di dualità o
comunque fa riferimento a considerazioni legate ai circuiti magnetici ed in definitiva ad analisi di
campo magnetico.
Ma anche questo circuito (cioè il circuito equivalente a T) può essere derivato direttamente dal
circuito equivalente degli induttori mutuamente accoppiati, senza nessun riferimento a
considerazioni di campo magnetico. Riprendiamo in esame l’equazione descrittiva del componente
“induttori mutuamente accoppiati”:
v1 sL1i1 sMi2
v2 sMi1 sL2i2
(17.1)
Si prenda ora in esame un parametro k. Questo parametro può assumere un valore qualsiasi, ed è a
completa scelta dell’utente del circuito: come si vedrà, l’unico requisito richiesto a questo
parametro è che presenti un valore differente da zero. Una scelta ovvia (ma certamente non l’unica
possibile) per il parametro k è di porlo pari al rapporto tra il numero di spire dei due avvolgimenti:
k N1 / N 2
Adesso, si riscrivano come segue le equazioni (17.1):
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 37 di 58
i
v1 sL1i1 s (kM ) 2
k
i
v 2 sMi1 s(kL2 ) 2
k
(17.2)
La forma (17.2) delle equazioni (17.1) è sempre possibile, perché – per ipotesi – k è diverso da zero.
Da un punto di vista matematico, la forma (17.2) è sempre possibile per qualsiasi valore di k, tranne
– ovviamente – il valore zero.
La seconda delle (17.2) può ora essere moltiplicata proprio per k:, e quindi le (17.2) si riscrivono
come segue:
i
v1 sL1i1 s(kM ) 2
k
i
kv2 s (kM )i1 s (k 2 L2 ) 2
(17.3)
k
Ora, a secondo membro della prima equazione può essere sottratto e sommato il termine skMI1,
mentre al secondo membro della seconda può essere sommato e sottratto il termine skMI2/k:
i
v1 sL1i1 s(kM ) 2 s(kM )i1 s(kM )i1
k
i
i
i
kv2 s(kM )i1 s(k 2 L2 ) 2 s(kM ) 2 s(kM ) 2
k
k
k
(17.4)
Raccogliendo i vari termini:
i
v1 s( L1 kM )i1 s(kM ) i1 2
k
i
i
kv2 s (kM ) i1 2 s(k 2 L2 kM ) 2
k
k
(17.5)
Le equazioni (17.5) sono proprio le equazioni di un circuito elettrico a T, che tra l’altro presenta
continuità elettrica tra il primo ed il secondo avvolgimento. Questo circuito non si comporta
elettricamente come il componente elettrico di partenza, gli induttori mutuamente accoppiati: è
formalmente un quadripolo, ma le sue tensioni e correnti di uscita (porta 2) non coincidono con le
corrispondenti grandezze di uscita del componente iniziale. Per “mettere a posto” le cose, è
sufficiente collegare i morsetti secondari ad un trasformatore ideale di rapporto k per avere un
comportamento elettrico del tutto equivalente. Ovviamente, il valore di k deve essere proprio quello
scelto dall’utente.
Nella Fig. 18 è rappresentato il circuito equivalente completo a T.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 38 di 58
k2L2-kM
L1-kM
I1
I2
k
V1
V2
kM
Figura 18 - Il circuito equivalente convenzionale a T.
18 LA CONVERSIONE ELETTROMECCANICA DELL’ENERGIA
L’equazione che definisce il rapporto tra campo di corrente e campo magnetico è ovviamente la
legge di Faraday-Neumann-Lenz, che viene riscritta di seguito nella forma più semplice:
v(t )
d d ( Li)
di
dL
L i
dt
dt
dt
dt
(18.1)
Il primo termine nell’ultima espressione viene definito “forza elettromotrice trasformatorica”, in
quanto appunto dipende soltanto dalla variazione della corrente senza la necessità di alcun
movimento meccanico, cioè con una modalità di funzionamento caratteristica del trasformatore; il
secondo termine viene invece chiamato “forza elettromotrice mozionale”, in quanto non dipende
dalla variazione della corrente ma dalla variazione del parametro induttivo. Quest’ultima fem di
solito si manifesta quando l’avvolgimenti ai cui capi si valuta la fem indotta si muove rispetto ad
un’altra struttura magnetica.
Fino ad ora sono stati considerati soltanto gli effetti trasformatorici del campo magnetico, cioè gli
effetti legati alla variazione temporale delle correnti e non alla variazione temporale dei coefficienti
di auto e mutua induzione. In altre parole, con riferimento all’equazione (18.1), si è trascurato
l’ultimo termine. Ma che i termini induttivi siano costanti non è sempre vero, anzi. Se c’è un solo
circuito elettrico collegato ad un avvolgimento che opera in una geometria magneticamente
variabile, oppure ci sono due circuiti che si muovono uno rispetto all’altro, i coefficienti di auto e
mutua induzione possono cambiare. In questo paragrafo verrà studiato proprio questo tipo di
fenomeni, arrivando ad una conclusione di estrema importanza: è possibile una ulteriore
trasformazione energetica rispetto a quelle studiate in precedenza. Fino ad ora erano in gioco
energia elettrica, magnetica, termica; la variazione dei parametri induttivi permette anche
l’interazione con l’energia meccanica.
18.1 la coppia elettromagnetica di riluttanza
Consideriamo la struttura magnetica rappresentata in Fig. 19. La struttura magnetica è
indefinitamente lunga nella direzione ortogonale al piano del disegno. Si tratta di un cilindro di
ferro cavo la cui posizione non può cambiare. Sui fianchi interno di questo cilindro sono praticate
delle scanalature (dette cave) dentro le quali sono alloggiati dei conduttori in rame. Questi
conduttori sono connessi posteriormente (in pratica dietro al disegno) con dei corto-circuiti,
formando così una spira. Di conseguenza, nella parte anteriore rimangono liberi due terminali, che
possono essere connessi ad una generatore elettrico.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 39 di 58
Al centro della struttura è presente un prisma di material ferromagnetico, con sezione quadrangolare
a lati mistilinei. Questa struttura non porta avvolgimenti, ma è libera di ruotare rispetto al centro di
simmetria del disegno. Poiché questa struttura è libera di ruotare, viene comunemente denominata
rotore, mentre, per analogia, il cilindro cavo (che, come detto, non può muoversi) viene chiamato
statore. La figura mostra quanto descritto con due posizioni angolari del rotore. Nel seguito, verrà
chiamato l’angolo che l’asse di rotore forma con l’orizzontale. Nella Fig. (19.2) l’angolo vale
90° oppure 270°, mentre nell’altra posizione vale 0° oppure 180°. Non sarà inutile ricordare che lo
schema fisico riportato in figura ha intenti soltanto di supporto alla trattazione teorica, e non ha
alcun riscontro nelle realizzazioni tecniche convenzionali.
Dall’esame della Figura 19, appare evidente che il coefficiente di autoinduttanza dell’avvolgimento
così ideato varia con il tempo, in dipendenza della posizione angolare del rotore. Anzi:
l’autoinduttanza varia con il tempo per il tramite esclusivo dell’ascissa angolare. In altri termini,
qualsiasi sia il valore del tempo t, l’autoinduttanza assume sempre lo stesso valore se la posizione
angolare è la stessa. Ancora più esplicitamente: ogni volta che il rotore si trova in una posizione
angolare, il valore dell’induttanza è sempre lo stesso, indipendentemente dal valore del tempo.
In particolare, nella posizione “verticale” l’autoinduttanza assume il valore massimo, mentre nella
posizione “verticale” il valore dell’autoinduttanza è minimo. Nel seguito, chiameremo Ld il valore
massimo dell’autoinduttanza, ed Lq il suo valore minimo2.
a)
b)
Fig. 19 – Rappresentazione schematica di una macchina a riluttanza con il rotore in due diverse posizioni.
Con le posizioni sopra espresse, l’andamento del coefficiente di auto induzione in funzione
dell’ascissa angolare di rotore, cioè della rotazione dell’asse di rotore rispetto all’orizzontale, è data
da:
L( )
Ld Lq
2
Ld Lq
2
cos(2 )
(18.1)
che può essere riscritta come:
L( ) L0 L2 cos(2 )
2
(18.1.a)
Per motivi che sono geometricamente evidenti, la Ld è detta induttanza secondo l’asse diretto” e la
Lq induttanza secondo l’asse in quadratura.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 40 di 58
La Fig. 20 esemplifica l’andamento dell’induttanza in funzione della posizione di rotore nel caso in
cui Ld sia pari a 6 ed Lq a 2, con un rapporto 3 tra le due grandezze.
Fig. 20 – Andamento del valore numerico dell’autoinduttanza in funzione della posizione di rotore.
L’equazione elettrica dell’avvolgimento di statore vale:
v(t ) Ri L
di
dL
di
dL d
di
dL
i
Ri L i
Ri L i
r
dt
dt
dt
d dt
dt
d
(18.2)
in cui R è la resistenza dell’avvolgimento, e r la velocità di rotazione del rotore. Moltiplicando
ambo i membri per la quantità idt, si ottiene a primo membro la quantità di energia elettrica che, nel
tempo dt, viene scambiata con la sorgente esterna. Per il teorema di conservazione dell’energia, a
secondo membro c’è la somma della variazione di energia magnetica (nel tempo dt) e l’energia
meccanica (sempre nel tempo dt). È ovvio che nell’intervallo di tempo dt l’energia meccanica
scambiata con l’esterno aveva valore Td, mentre la corrente è variata di di e l’induttanza di dL.
vidt Ri 2 dt Lidi i 2 dL
(18.3)
Come abbiamo dimostrato in precedenza, l’energia immagazzinata nell’induttanza vale:
1
W ( L) Li 2
2
(18.4)
La variazione dell’energia immagazzinata nell’induttanza nel tempo dt, dovuta ad una variazione di
della corrente ed una variazione dL dell’induttanza, vale:
1
dW Lidi i 2 dL
2
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 41 di 58
(18.5)
Di conseguenza, la (18.2) può essere riscritta come:
1
vidt Ri 2 dt dW i 2 dL
2
(18.6)
Il termine a primo membro rappresenta la potenza elettrica scambiata con la rete elettrica nel tempo
dt. Il primo termine a secondo membro rappresenta l’energia elettrica dissipata per effetto Joule, la
seconda la variazione di energia nel campo magnetico. Finalmente, l’ultimo termine a secondo
membro rappresenta l’energia meccanica ceduta (od assorbita) nell’atto di moto rotatorio d.
1
Td i 2 dL
2
(18.7)
per la coppia T si ha quindi:
T
1 2 dL
i
2 d
(18.8)
Esplicitando nella (18.8) l’espressione della derivata angolare dell’induttanza come espressa nella
(18.2.a) si ottiene:
T i 2 L2 sin 2
(18.9)
Come ovvio, il segno delle coppia dipende soltanto dal segno di sin 2.
18.2 la coppia elettromagnetica di azione
Prendiamo adesso in considerazione una struttura magnetica del tipo rappresentato in Fig. 21.
Adesso il rotore presenta simmetria circolare rispetto all’asse di rotazione; sul rotore e sullo statore
sono praticate quattro scanalature di fatto identiche, che danno luogo ad un avvolgimento di statore
e ad uno di rotore. Mentre l’avvolgimento di statore è del tutto simile a quello descritto nel caso
della coppia di riluttanza, la connessione elettrica tra l’avvolgimento di rotore ed una sorgente
elettrica non è di immediata comprensione. Dal punto di vista strutturale, questa connessione è
possibile mediante un sistema anelli-spazzole striscianti in carbone, i primi solidali al rotore e
connessi ai due terminali dell’avvolgimento di rotore, e le seconde solidali allo statore e collegate ai
terminali dell’avvolgimento di statore.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 42 di 58
Fig. 21 –
Una struttura statore-rotore magneticamente simmetrica, con una bobina sullo statore ed una bobina sul
rotore.
Anche in questo caso, per ipotesi, tutti i materiali magnetici sono lineari ed isotropi. Poiché il
rotore, a differenza del caso precedente, è magneticamente simmetrico, le due induttanze di fase
sono costanti nel tempo, o meglio, non dipendono dalla posizione angolare , definita come lo
spostamento angolare tra l’asse della spira di rotore e quello della spira di rotore. Il coefficiente di
mutua induzione tra l’avvolgimento di rotore e quello di statore è variabile: è massimo quando =
0, è massimo negativo quando = , assume valore zero per . = / 2 e = 3 / 2.
Considerando l’andamento qualitativo della M nei vari intervalli spaziali, è evidente che (in prima
approssimazione, o, meglio, considerando la prima armonica dell’andamento spaziale della M) si
può porre:
M 12 ( ) M cos
(18.9)
Le due equazioni elettriche dei due avvolgimenti possono essere scritte:
d 1
di
di
dM 12 d
R1i1 (t ) L1 1 M 12 2 i2
dt
dt
dt
d dt
d 2
di
di
dM 12 d
v 2 (t ) R2 i2 (t )
R2 i2 (t ) L2 2 M 12 1 i1
dt
dt
dt
d dt
v1 (t ) R1i1 (t )
(18.10)
Di nuovo, consideriamo un intervallo di tempo dt. In questo intervallo di tempo, l’ascissa angolare
di rotore varierà di un intervallo d, e la corrente avrà una variazione di. Le due induttanza proprie
non presenteranno alcuna variazione, mentre il coefficiente di mutua induttanza presenterà una
variazione dM.
Moltiplicando il primo membro per i1dt ed il secondo per i2dt e sommando, si ottiene:
v1i1dt v2 i2 dt R1i12 dt R2 i22 dt L1i1di1 M 12i1di2 L2 i2 di2 M 12i2 di1 2i1i2 dM 12
(18.11)
In analogia a quanto fatto in precedenza, il primo membro rappresenta l’energia scambiata con la
rete elettrica esterna (nel suo complesso). A secondo membro c’è la somma dell’energia dissipata
per effetto Joule, la variazione dell’energia magnetica e l’energia meccanica T d.
La variazione dell’energia immagazzinata nel campo magnetico vale:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 43 di 58
dWmagn L1i1di1 L2i2di2 M12i1di2 M12di1i2 dM12i1i2
(18.12)
Per confronto tra la (18.11) e la (18.12), la coppia elettromagnetica può essere espressa come:
T i1i2
dM 12
d
(16.13)
Esplicitando nella (18.13) l’espressione della derivata angolare del coefficiente di mutua induttanza
si ottiene:
T i1i2 M sin
(18.14)
Come evidente dalla (18.14), la coppia elettromagnetica è positiva nell’intervallo spaziale tra -90° e
0°. Spostando il rotore in senso orario ad esempio di 45°, il rotore tende a spostarsi in senso
antiorario. La coppia è nulla quando le due strutture sono geometricamente allineate. La coppia è
negativa per l’intervallo spaziale tra 0° e 90°. Spostando – ad esempio – il rotore in senso antiorario
di 45°, quest’ultimo tende a muoversi in senso orario per allinearsi nuovamente allo statore.
A differenza di quanto avveniva per la coppia di riluttanza, adesso è possibile invertire il segno
della coppia per qualsiasi valore della posizione angolare di rotore semplicemente invertendo il
segno di una delle due correnti.
APPENDICE 1
UGUAGLIANZA DEI COEFFICIENTI DI MUTUA INDUZIONE
In questa appendice si dimostrerà che, in un componente “induttori mutuamente accoppiati”, i
coefficienti di mutua induzione sono uguali, cioè che: M12 = M12.
Riprendiamo in considerazione il componente “induttori mutuamente accoppiati”.
i1(t)
v1(t)
i2(t)
v2(t)
La forma più generale possibile delle equazioni di circuito è:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 44 di 58
di1
di
M 12 2
dt
dt
di
di
v 2 L2 2 M 21 1
dt
dt
v1 L1
Dove i coefficienti di mutua induzione sono – per il momento – supposti numericamente diversi tra
loro. Dalle equazioni sopra scritte risulta evidente che:
1. non ci sono fenomeni dissipativi;
2. tutta l’energia elettrica (delle sorgenti di tensione/corrente) si converte in energia del campo
magnetico e viceversa.
Ci sono almeno due approcci per dimostrare l’uguaglianza dei due coefficienti:
1. Un approccio di natura energetica;
2. Un approccio di natura più matematica, basato sulle leggi di Ampére, che utilizza il
potenziale vettore.
A1-1 Approccio energetico per la dimostrazione dell’uguaglianza dei coefficienti di mutua
induzione negli induttori mutuamente accoppiati
Ipotizziamo due metodiche di alimentazione:
METODICA DI ALIMENTAZIONE A
1. La corrente nell’avvolgimento 1 viene portata linearmente nel tempo T1 da 0 a I1, mentre
l’avvolgimento 2 viene mantenuto aperto;
2. La corrente nell’avvolgimento 2 viene portata linearmente nel tempo T2 (che inizia a T1 e
finisce a T1 + T2) da 0 a I2, mentre l’avvolgimento 1 viene alimentato a corrente costante
I1.
METODICA DI ALIMENTAZIONE B
1. La corrente nell’avvolgimento 2 viene portata linearmente nel tempo T2 da 0 a I2, mentre
l’avvolgimento 1 viene mantenuto aperto;
2. La corrente nell’avvolgimento 1 viene portata linearmente nel tempo T1 (che inizia a T2 e
finisce a T2 + T1) da 0 a I1, mentre l’avvolgimento 2 viene alimentato a corrente costante
I2.
Nelle due metodiche cambia soltanto la sequenza di alimentazione: nella A viene prima alimentato
1 e poi 2, nella metodica B avviene il contrario. È peraltro evidente che al termine di entrambe le
due metodiche di alimentazione, cioè dal tempo T2 + T1 in poi, lo stato del sistema è lo stesso,
l’energia erogata dai generatori è zero, e quindi l’energia immagazzinata nel campo magnetico deve
essere la stessa.
METODICA A
Primo intervallo di tempo
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 45 di 58
In questa metodica, nell’intervanno di tempo tra 0 e T1 le correnti hanno i valori:
i1 (t )
I1
t
T1
i2 (t ) 0
Le equazioni di circuito divengono quindi:
v1 (t ) L1
I1
T1
v 2 (t ) M 21
I1
T1
Per quanto riguarda il bilancio energetico tra il tempo 0 ed il tempo T1 :
T1
T
I1 I1 1
1
v
i
v
i
dt
L
tdt 0 L1I12
1
0 1 1 2 2
T1 T1 0
2
E quindi l’energia magnetica immagazzinata nel sistema al tempo T1 :
Wmagn ( A, t T1 )
1
L1 I12
2
Secondo intervallo di tempo
Nella metodica di alimentazione A, nell’intervallo di tempo tra T1 e T2 le correnti hanno il valore:
i1 (t ) I1
i2 (t )
I2
t0
T2
Le equazioni di circuito divengono quindi:
v1 (t ) M 12
I2
T2
v 2 (t ) L2
I2
T2
Per quanto riguarda il bilancio energetico:
T1 T2
v1i1 v2i2dt M12I1
T1
I2
T2
T1 T2
dt L2 I1
T1
I2 I2
T2 T2
T1 T2
tdt M
T1
1
I I L2 I 22
2
12 1 2
In definitiva, al tempo finale l’energia nel sistema di induttori è la seguente:
Wmagn ( A, t T1 T2 )
1
1
L1I12 L2 I 22 M 12 I1 I 2
2
2
METODICA B
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 46 di 58
Il caso è del tutto analogo al precedente; è sufficiente cambiare il pedice 1 con il pedice 2. Alla fine
del primo periodo di tempo T2, l’energia immagazzinata nel campo magnetico vale:
1
L2 I 22
2
Wmagn ( B, t T2 )
E per quanto riguarda l’energia immagazzinata nel sistema al tempo T2 + T1 :
Wmagn ( B, t T2 T1 )
1
1
L2 I 22 L1 I12 M 21I 2 I1
2
2
I due valori di energia immagazzinata nel campo magnetico con le due metodiche di alimentazione
differiscono formalmente per la presenza nell’uno del termine M12 e nell’altro del termine M21 . è
peraltro da notare che in entrambe le metodiche, le correnti al tempo (T1 + T2) sono uguali. Di
conseguenza, è uguale lo stato magnetico del materiale in ogni punto, ed è analogamente uguale il
valore della densità locale di energia e in definitiva dell’energia immagazzinata nel campo
magnetico. Poiché non si sono considerate forme differenti di energia (perdite, radiazione, …) è
evidente che le due metodiche devono portare allo stesso risultato. E perché ciò avvenga, l’unica
condizione al contempo necessaria e sufficiente è che:
M12 M 21
A1-2 Approccio analitico per la dimostrazione dell’uguaglianza dei coefficienti di mutua
induzione negli induttori mutuamente accoppiati
Cconsideriamo due spire a sezione puntiforme c1 e c2 percorse da correnti variabili nel tempo.
Come posto in precedenza, il flusso di induzione magnetica dovuto alle azioni mutue si può
scrivere:
12 M 12i2
21 M 21i1
Definendo B1 come il campo di induzione dovuto alla scorrente che scorre nella spira 1, il flusso
concatenato con la spira 2 e dovuto a questo campo di induzione è dato da:
12 B1 ndS
S2
Definendo il potenziale vettore come B A , la precedente può essere riscritta, utilizzando
come al solito il teorema di Stokes:
12 B1 ndS A ndS A dl2
S2
S2
l2
La soluzione dell’equazione di Poisson, in termini di potenziale vettore, fornisce l’espressione del
potenziale vettore stesso:
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 47 di 58
A 0
4
J
r dV
V
In cui V è tutto lo spazio ed r è la distanza tra il punto dove si vuole calcolare il potenziale vettore
e il punto dove c’è la densità di corrente J J. Ovviamente, per ipotesi, tale corrente è diversa da zero
soltanto nei punti del circuito 1. Si ha quindi:
i dl i dl dl
12 0 1 1 dl2 0 1 1 2
4 l r
4 l2 L1 r
l2
1
Ripetendo gli stessi passaggi per il flusso concatenato col circuito 1 quando passa corrente soltanto
nel circuito 2, si trova:
i dl dl
21 0 1 2 1
4 l l
r
1 2
Osservando le quantità tra parentesi nelle espressioni dei due flussi si vede chiaramente che sono
identiche pertanto è M1,2 = M2,1 = M.
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 48 di 58
APPENDICE 2
LA VERA STORIA
DELLA SCOPERTA DEL TEOREMA
DI FARADAY-NEUMANN-LENZ
--------- fine del presente documento --------- Ezio Santini --------- 20 Agosto 2012---------
Ezio Santini – Macchine Elettriche – volume I – capitolo 1 – pagina 49 di 58