Meccanica
cinematica : moti rettilinei
© 2006
Appunti di fisica
Prof. Calogero Contrino
Moti rettilinei
Moti vari
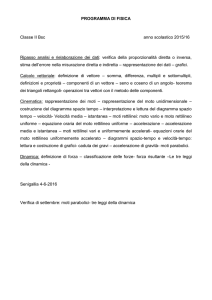
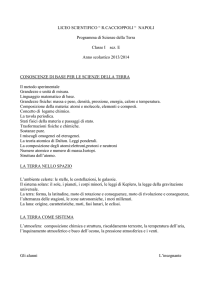
Nel caso in cui la velocità non rimanga costante , ma subisca variazioni , il moto rettilineo sarà
genericamente definito vario. Nella figura 1 è rappresentata un situazione abbastanza
semplice nella quale la velocità è diversa nei tratti x0-x1, x1-x2, x2-x3, x3-x4 ma è costante in
ogni tratto . In generale la velocità però può variare in ogni istante e con legge qualsiasi.
Fig. 1
Nella figura 1 in particolare si ha :
x1 – x0
x2 – x1 x3 – x2 x4 – x3
;
t1 – t0
t2 – t1
t3 – t2
t4 – t3
La corrispondente legge oraria è riportata nella
figura 2 (poligonale di colore azzurro).
In colore rosso è riportato un esempio in cui la
velocità cambia con continuità .
Da notare che nell’intervallo t0 - t1 il moto è
progressivo (progrado) mentre nell’intervallo t1 - t4
il moto è retrogrado.
x0
x2
x3
x4
Fig. 2
x4
x3
x2
x1
x0
O
Corso multimediale di fisica
Prof Calogero Contrino
x1
t0
t1
t2 t3
t4
06/01/2015
t
2/8
Moti rettilinei
Moto uniformemente vario
Un moto vario abbastanza semplice da studiare è quello descritto dalla seguente definizione:
Moto rettilineo uniformemente vario
Il moto rettilineo di un corpo (punto materiale) si dice uniformemente vario se in tempi
uguali la sua variazione di velocità risulta uguale o (conseguentemente) in tempi diversi
risulta proporzionale ai tempi impiegati .
Dal punto di vista matematico per descrivere questo movimento basterà esplicitare tale
proporzionalità, tenendo presente che le velocità (come gli spostamenti) possono essere in
questo caso considerati alla stregua di grandezze scalari, essendo fissata la direzione
(traiettoria rettilinea). Si può scrivere cioè, essendo t0 e v0 l’istante iniziale e la velocità iniziale
del punto materiale e ti , vi rispettivamente il generico istante di osservazione ed il
corrispondente valore della velocità :
v1 – v0
v2 – v1 v3 – v2 v4 – v3 v2 – v0 v3 – v0
v4 – v0 v4 – v1
=
=
=
=
=
=
=
= .....
t1 – t0
t2 – t1
t3 – t2
t4 – t3
t3 – t0
t3 – t0
t4 – t0
t4 – t1
Questa catena di rapporti è rappresentata nel grafico v- t della fig. 3
Corso multimediale di fisica
Prof Calogero Contrino
06/01/2015
3/8
Moti rettilinei
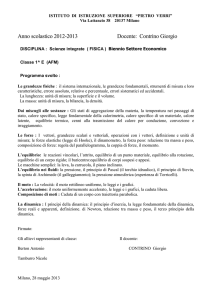
Moto uniformemente vario: legge di variazione della velocità
Dalla catena di proporzionalità precedente, ricordando la definizione di accelerazione media
si ha: a = v = k
Si può pertanto affermare che:
1
t
In un moto rettilineo uniformemente vario l’accelerazione media del corpo è costante
per qualsiasi t e coincide con l’accelerazione istantanea.
Dalla 1 si può ricavare una relazione tra il generico valore della velocità v all’istante t e
l’istante medesimo, conoscendo i valori iniziali t0 e v0 ; si ha successivamente :
v-v0 a
v a
= v-v0 = a (t-t0) v = v0 + a (t-t0)
=
t-t0
t
Per evidenziare che v dipende dal valore di t si
scriverà: v(t) = v0 + a (t - t0)
2
L’equazione 2 viene detta legge di variazione della
velocità del moto e consente di ricavare, essendo
noti a,v0,t0 , la velocità del corpo in un qualsiasi
istante t > t0 .Il grafico relativo riportato in fig 3, non
si deve confondere con quello della legge oraria,
ancora da ricavare.
Corso multimediale di fisica
Prof Calogero Contrino
Fig. 3
v4
v3
v2
v1
v0
O
t0
t1
t2
t3
t4
06/01/2015
t
4/8
Moti rettilinei
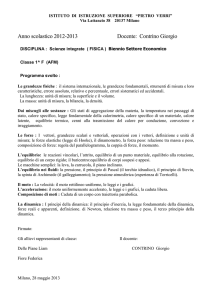
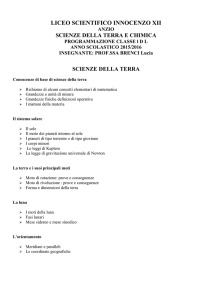
Moto uniformemente vario: determinazione di a sul piano v-t
Dal grafico della legge di variazione della velocità si può ricavare facilmente il valore di a .
A tale scopo, sull’asse t si considerano due istanti qualsiasi tali che t2 > t1 t0 , quindi si
leggono sull’asse v i corrispondenti valori v2 e v1, il valore dell’accelerazione è
v – v1
immediatamente dato da : a = v = 2
t2 – t1
t
Tale valore ha un significato geometrico ben preciso sul grafico della legge di variazione della
velocità .
Si osservi che nel triangolo rettangolo P1HP2 il
Fig. 4
valore di v = v2− v1 è la lunghezza del cateto HP2
P2
mentre il valore di t = t2 − t1 è la lunghezza del
v2
cateto P1H .
v2 – v1
H P2
v
Pertanto si ha : a =
=
=
= tg
P
H
t
–
t
t
1
2
1
P1
H
Con angolo formato dalla retta, su cui giace la
v1
leggedi variazione della velocità, con il semiasse
v0
positivo dei tempi. In definitiva quindi
la pendenza della legge di variazione della velocità
fornisce il valore di a .
Corso multimediale di fisica
Prof Calogero Contrino
O
t0
t1
t2
t
06/01/2015
5/8
Moti rettilinei
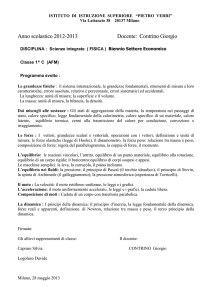
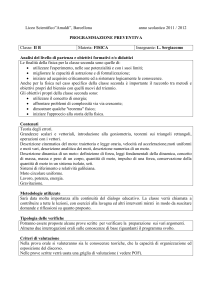
Moto uniformemente vario: determinazione della legge oraria
Si procede alla determinazione della legge oraria . A tale scopo si esamini il grafico della
legge di variazione di velocità (fig 1). Nell’intervallo t0 - t la velocità varia con continuità in
v +v
modo lineare tra i valori v0 e v mentre il suo valore medio è dato da: vm = 0
2
Se si sostituissero i valori effettivi delle velocità nei vari istanti con il loro valore medio si
potrebbe assimilare il moto vario ad un moto uniforme con velocità v0= vm .
La legge oraria sarebbe data da quella del moto
uniforme avendo sostituito v0 con vm.
Cosi operando si commetterebbe l’errore di sostituire
ai valori effettivi delle velocità istantanee il loro valore
medio nell’intervallo di tempo t considerato .
Si osservi però che tali errori in eccesso (area arancione)
nell’intervallo t0-tm vengono compensati dagli errori in
difetto (area viola) nell’intervallo tm-t qualsiasi sia t,
anche, a maggior ragione, con t 0 .
Quindi tale modo di procedere non inficia l’esattezza
del risultato finale. Si procede nel seguito per tale via.
Corso multimediale di fisica
Prof Calogero Contrino
Fig. 5
v
Vm
v0
O
t0
tm
t
t
06/01/2015
6/8
Moti rettilinei
Moto uniformemente vario: determinazione della legge oraria
Dalla legge oraria del moto rettilineo uniforme x(t) = x0 + v0 (t .- t0)
sostituendo v0 con vm
si ottiene : x(t) = x0+ vm (t - t0)
1
v +v
Dalla legge di variazione della velocità v(t) = v0 + a (t - t0) , essendo vm = 0
si ha:
2
v + v0 + a(t - t0)
1 a(t - t ) 2
vm = 0
0
= v0 +
2
2
Sostituendo la 2 nella 1 si ottiene :
x(t) = x0 + v0 + 1 a(t - t0) (t - t0)
2
da cui sviluppando il prodotto infine si ottiene:
1 a(t - t )2
3
0
2
La 3 è l’equazione della legge oraria cercata. Nel
piano t , x(t) essa è rappresentata da un arco di
parabola.
Vedi pag 17
x(t) = x0 + v0 (t - t0) +
Si esamineranno nel seguito alcune possibili
situazioni in relazione ai parametri iniziali t0 , x0 ,v0.
Corso multimediale di fisica
Prof Calogero Contrino
v2
Vm
v0
O
t0
tm
t
t
06/01/2015
7/8
Moti rettilinei
Moto uniformemente vario: moto naturalmente accelerato
Nel caso in cui v0=0 (moto con partenza da fermo) il moto si dice naturalmente accelerato e
l’equazione 3 assume la forma: x(t) = x0 + 0 (t - t0) + 1 a(t - t0)2 x(t) = x0 + 1 a(t - t0)2
2
2
2
1
a(t - 0) x(t) = 1 at2
Se anche t0= 0, x0=0 la 3 assume la forma più semplice: x(t) = 0 +
2
2
Nella figura è riportato il grafico sia con a >0 (moto progressivo) sia con a <0 (moto retrogrado) .
Essendo la velocità istantanea definita in forma
x
Vai alla pag 22
scalare da : vi =
t t 0
essa in corrispondenza di un istante ti sul grafico è
quindi valutabile come valore della pendenza della
tangente alla legge oraria in quel punto e si ha , come
x -x
x
vi = i+1 i = tg
visto : vi =
t t 0
ti+1 - ti
xi+1
xi
O
ti
ti+1
t
con xi+1 valutato in corrispondenza di ti+1 sulla retta
tangente alla parabola in ti .
Si noti che, essendo v0=0, in corrispondenza
dell’origine degli assi la tangente alla parabola è
orizzontale (l’origine degli assi è vertice della parabola)
Corso multimediale di fisica
Prof Calogero Contrino
06/01/2015
8/8
Moti rettilinei
Moto naturalmente accelerato: grafico della legge oraria
Nella figura riportata sotto sono illustrate diverse situazioni di moti naturalmente accelerati in
corrispondenza di alcuni tra i possibili valori che t0 ed x0 possono assumere .
x(t) = x0 + 1 a(t - t0)2
2
a>0
a<0
x(t) = x0 + 1 at2
2
a<0
a>0
x0
x0
x0
O
t0=0
x0
t
Corso multimediale di fisica
Prof Calogero Contrino
O
t0=0
O
O
t
t0
t
t0
t
06/01/2015
9/8
Moti rettilinei
Moto uniformemente vario: partenza in velocità
Nel caso in cui v0 0 (moto con partenza in velocità) si possono determinare due situazioni
sostanzialmente diverse:
•
la velocità iniziale è concorde in segno con l’accelerazione: il moto per tutta la sua durata
sarà accelerato, in quanto velocità istantanea e accelerazione saranno sempre concordi.
•
la velocità iniziale e l’accelerazione hanno segni discordi : il moto, nell’ intervallo di tempo
in cui velocità istantanea e accelerazione si manterranno discordi, sarà ritardato mentre,
nell’ intervallo di tempo in cui velocità istantanea e accelerazione risulteranno concordi,
sarà accelerato.
Nel seguito sono illustrate alcune delle possibili situazioni.
Corso multimediale di fisica
Prof Calogero Contrino
06/01/2015
10/8
Moti rettilinei
Moto uniformemente vario: partenza in velocità
Nella figura riportata sotto sono illustrate possibili situazioni di moti uniformemente vari con
partenza in velocità ed a e v0 concordi in corrispondenza di diversi valori assunti da t0 ed x0=0
x(t) = v0t + 1 at2
2
a>0 ; v0 >0
a<0 ; v0 <0
x(t) = v0(t-t0) + 1 a(t-t0)2
2
a>0 ; v0 >0
a<0 ; v0 <0
t0=0
O
O
tg=v0
t0=0
Corso multimediale di fisica
Prof Calogero Contrino
t0
tg=v0
O
t
O
t
t0
tg=v
0
t
tg=v0
t
06/01/2015
11/8
Moti rettilinei
Moto uniformemente vario: partenza in velocità
Nella figura riportata sotto sono illustrate alcune possibili situazioni di moti uniformemente vari
con partenza in velocità ed a e v0 concordi in corrispondenza di diversi valori assunti da t0 ed
x00
x(t) = x0 + v0t + 1 at2
2
a>0 ; v0 >0
a<0 ; v0 <0
x(t) = x0 + v0(t-t0) + 1 a(t-t0)2
2
a>0 ; v0 >0
a<0 ; v0 <0
x0
O t0=0
x0
x0
tg=v0
O
t0=0
Corso multimediale di fisica
Prof Calogero Contrino
t
t0
t
tg=v0
O
O
x0
t0
tg=v0
t
t
tg=v0
t0
06/01/2015
12/8
Moti rettilinei
Moto uniformemente vario: partenza in velocità
Nella figura riportata sotto sono illustrate alcune possibili situazioni di moti uniformemente vari
con partenza in velocità ed a e v0 discordi in corrispondenza di alcuni valori assunti da t0 ed
x0=0 (Il tratto con moto accelerato è in colore fucsia il tratto con moto ritardato è in colore blu)
x(t) = v0t + 1 at2
2
a<0 ; v0 >0
a>0 ; v0 <0
O
t0=0
O
tg=v0
t0=0
Corso multimediale di fisica
Prof Calogero Contrino
x(t) = v0(t-t0) + 1 a(t-t0)2
2
a<0 ; v0 >0
a>0 ; v0 <0
O
tg=v0
t0
t
O
t
t0
tg=v0
t
tg=v0
t
06/01/2015
13/8
Moti rettilinei
Moto uniformemente vario: partenza in velocità
Nella figura riportata sotto sono illustrate alcune possibili situazioni di moti uniformemente vari
con partenza in velocità ed a e v0 discordi in corrispondenza di diversi valori assunti da t0 ed
x00 (Il tratto con moto accelerato è in colore fucsia il tratto con moto ritardato è in colore blu).
x(t) = x0 + v0t + 1 at2
2
a<0 ; v0 >0
a>0 ; v0 <0
x0
O
O
x0
t0
tg=v0
Corso multimediale di fisica
Prof Calogero Contrino
tg=v0
t
tg=v0
O
t
t0=0
x0
x(t) = x0 + v0(t-t0) + 1 a(t-t0)2
2
a<0 ; v0 >0
a>0 ; v0 <0
t0=0
O
t
x0
tg=v0
t0
t
06/01/2015
14/8
Moti rettilinei
Moto uniformemente vario: esercizio tipo 1
Rappresentare sul piano cartesiano t , x(t) la seguente legge oraria :
x(t) = 10m + 20 m (t+3) ‒ 5 m (t+3)2
s2
s
Si tratta di un moto uniformemente vario con partenza in velocità per il quale si ha:
t0 = −3s ; v0=20m/s ; a = −10m/s2 ; x0 = 10m .
Essendo a<0 la concavità è rivolta verso il basso.
Si determina l’ascissa del vertice :
−v0
−20m/s
tv =
+ t0 =
− 3s = − 1s
a
−10m/s2
Essendo tv > t0 il vertice è punto della legge oraria;
se ne determina l’ordinata :
xv = x(1s) = 10m + 20 m (2s) - 5 m (2s)2 = 30m
s2
s
Si determina l’intersezione con l’asse x
x(0s) = 10m + 20 m (3s) - 5 m (3s)2 = 25m
s2
s
Il grafico è quello della figura a lato .
Corso multimediale di fisica
Prof Calogero Contrino
x
30m
tg=v0
−3s
10m
−1s
O
t
06/01/2015
15/8
Moti rettilinei
Moto uniformemente vario: esercizio tipo 2
Per il moto dell’esercizio precedente determinare analiticamente la velocità all’istante t = 0,5s ,
quindi verificare graficamente il risultato .
I dati precedentemente ricavati dalla legge oraria sono:
t0=−3s ; v0=20m/s ; a= −10m/s2 ; x0 = 10m .
Pertanto dalla legge di variazione della velocità si ha:
− 10 m2 (0,5s +3s) = − 15 m
s
s
x
r
Verifica grafica (vedi figura a lato):
tracciata la retta r tangente al grafico nel punto di
ascissa t = 0.5 s , al quale corrisponde un valore
dell’ordinata x = 17.5m, si fissa ad arbitrio un t = 1s
al quale corrisponde una lettura, valutata rispetto alla
retta r, di un x = 2,5m-17,5m= -15,0m
Pertanto si avrà :
v(0,5s) = tg = x = -15,0m = − 15 m
s
1s
t
Corso multimediale di fisica
Prof Calogero Contrino
30m
t = 1,00s
17,5m
x = -15,00m
v(t) = 20 m
s
10m
2,5m
−3s
−1s
O
t=0,5s
t
06/01/2015
16/8
Geometria Analitica
La parabola
La parabola è una curva piana illimitata che presenta un asse di simmetria ( essa sarà trattata
in modo approfondito nel prosieguo del corso di studi) i cui punti (di coordinate x,y), se l’asse
di simmetria risulta parallelo all’asse delle ordinate, soddisfano l’equazione y = ax2 + bx + c
con a ∈ ℝ0 , b ∈ ℝ , c ∈ ℝ . La curva rivolge la concavità verso l’alto o verso il basso
rispettivamente se risulta a > 0 oppure a < 0.
Il punto d’intersezione dell’asse con la curva prende il nome di vertice, le sue coordinate
2
xV = − b
dipendono da a, b e c e sono date da:
; yV = − b - 4ac
2a
4a
a >0
a<0
asse
asse
V
V
− ∆
4a
−
Corso multimediale di matematica
Prof Calogero Contrino
b
2a
− ∆
4a
−
b
2a
06/01/2015
17/8
Geometria Analitica
La parabola : esempi di tracciamento
Si riportano di seguito due esempi di tracciamento ,su un piano cartesiano , di una parabola
assegnata la sua equazione :
primo esempio
1
y = x2 - 4x + 2
La curva presenta la concavità verso l’alto (a = 1), le coordinate del vertice sono
2
rispettivamente xV = − b = − − 4 = 2 e yV = − b – 4ac = − 16 – 4‧1‧2 = − 2
2a
2
4a
4‧1
Essendo la 1) una funzione, l’ordinata del vertice può essere ricavata in modo alternativo
assegnando nella 1) alla variabile x il valore di xv nel nostro caso : yv = 22 - 4‧2 + 2 = −2
Allo stesso modo si possono ricavare altre ordinate
della curva assegnando determinati valori
all’ascissa della curva.
Nella figura a lato sono state cosi ricavate le
ordinate in corrispondenza delle ascisse
- 1; 0; e 4; 5; (simmetriche rispetto all’ascissa 2 )
Si individuano così altri punti che consentono di
ottenere l’ andamento qualitativo della curva.
asse
a=1
7
2
-1
-2
Corso multimediale di matematica
Prof Calogero Contrino
2
4 5
V
06/01/2015
18/8
Geometria Analitica
La parabola : esempi di tracciamento
1 2
x − 2x + 2 2
2
La curva presenta la concavità verso il basso (a = − 1/2), le coordinate del vertice sono
b2 – 4ac
4 – 4‧(−1/2)‧2
rispettivamente xV = − b = − −2
= − 2 e yV = −
=−
= +4
2‧(−1/2)
2a
4a
4‧(−1/2)
secondo esempio y = −
Come detto in precedenza, l’ordinata del vertice può essere ricavata in modo alternativo
ancora assegnando nella 2) alla variabile x il valore di xv : yv = (– 1/2)(– 2)2 – 2(– 2 )+ 2 = + 4
Allo stesso modo si ricavano altre ordinate della
curva assegnando all’ascissa i seguenti valori - 6;
- 4; 0; 2.
a = -1/2
V
4
Si individuano così altri punti che consentono di
ottenere l’ andamento qualitativo della curva.
2
-6
-4
-2
2
asse
-4
Corso multimediale di matematica
Prof Calogero Contrino
06/01/2015
19/8
Geometria Analitica
Equazione della rette tangente alla parabola in un suo punto dato
Data una parabola di equazione y = ax2 + bx + c l’equazione della retta tangente alla curva in
suo punto di coordinate x0 , y0 si determina facilmente con il metodo detto dello sdoppiamento
Si procede come segue :
Nell’equazione data si sostituisce il termine x2 con il prodotto x‧x0 , i termini y e x si
sostituiscono rispettivamente con le medie aritmetiche y +y0 , x +x0 .
2
2
Pertanto l’equazione della retta tangente alla parabola di equazione y = ax2 + bx + c nel
punto P(x0,y0) è : y + y0 = axx0 + b x + x0 + c
2
2
Per la parabola della figura a lato di equazione :
1 2
y =−
x − 2x + 2
2
L’equazione della tangente nel punto P(0;2) è :
y+2
x+0
1 x‧0
‒ 2
+ 2 da cui
= −
2
2
2
y+2
= ‒x+2 →
2
ed infine y = ‒2x + 2
y + 2 = ‒ 2x + 4
a = -1/2
V
4
2
-6
-4
-2
2
y = ‒2x + 2
asse
-4
Corso multimediale di matematica
Prof Calogero Contrino
06/01/2015
20/8
Geometria Analitica
La parabola traslata lungo l’asse x
Nel caso in cui si ha un’equazione del tipo y = a(x-x0)2 + b(x-x0) + c con a ∈ ℝ0 , b ∈ ℝ , c ∈ ℝ
essa rappresenta la parabola di equazione y = ax2 + bx + c traslata verso destra o verso
sinistra lungo l’asse x della quantità ∣x0∣ rispettivamente con x0 >0 e x0<0
Nella figura in basso sono riportate le due situazioni.
Ritorna alla pagina 7
x0 > 0
x0 < 0
f(x)
f(x-x0)
x0
Corso multimediale di matematica
Prof Calogero Contrino
f(x-x0)
f(x)
x0
06/01/2015
21/8
Moti rettilinei
La velocità istantanea è la pendenza della tangente alla legge oraria
Per valutare la velocità del punto in un dato istante ti si potrebbe pensare di utilizzare la
formula della velocità media imponendo la coincidenza dell’istante finale ti+1 con l’istante
iniziale ti . In tal caso però la formula, essendo t = ti+1 – ti = 0, diventa inutilizzabile ( è impossibile
operare la divisione per zero). Si deve cambiare l’approccio al problema. A tal proposito si osservi
cosa accade quando ti+1 si avvicina a ti cioè quando t 0 .
In tale situazione le pendenze xji , con tj = ti+1
tji
istante successivo all’istante ti e sempre più vicino a
x
ti , forniscono le velocità medie vMji = ji nei diversi
tji
intervalli di tempo. Inoltre, come si nota nella figura,
xi+1
quando tji → 0 la pendenza tende a stabilizzarsi
xi+1
intorno al valore della pendenza della retta tangente
alla legge oraria nell’istante ti . Inoltre quando tji → 0
la velocità media coincide di fatto con la velocità
istantanea.
Corso multimediale di fisica
Prof Calogero Contrino
xi
O
ti
ti+1
t
06/01/2015
22/8
Moti rettilinei
La velocità istantanea è la pendenza della tangente alla legge oraria
Particolare ingrandito della figura precedente
xi+1
xi
O
Corso multimediale di fisica
Prof Calogero Contrino
ti ti+1
t
06/01/2015
23/8
Moti rettilinei
La velocità istantanea è la pendenza della tangente alla legge oraria
In definitiva si può concludere che per la velocità istantanea definita in forma scalare si ha:
xi+1 - xi
vi = x
v
cioè
= tg
=
i
t t 0
ti+1 - ti
con xi+1 che è valutato in corrispondenza di un qualsiasi ti+1 sulla retta tangente alla legge
oraria ( parabola ) in ti e non sulla curva della legge oraria
torna alla pagina 8
xi+1
xi+1
xi
O
Corso multimediale di fisica
Prof Calogero Contrino
ti
ti+1
t
06/01/2015
24/8