Capitolo 2
Cinematica ed altre nozioni introduttive
2.1 Richiami e relazioni di calcolo vettoriale
Notazioni:
A
A = vettore
e
A = modulo di A
e=
A
= versore
A
Valgono le seguenti proprietà:
B
A
Somma
A+B =C
−B
C
Sottrazione
A−B =D
Prodotto scalare
A ⋅ B = A B cosθ
D
A
B cos θ A
Prodotto vettoriale
A × B = ( A B senθ )e = G
θ
B
A cos θ
C
Sistemi di coordinate ortogonali
Un sistema di coordinate o di vettori ai è ortogonale se
ai ⋅ a j = 0 con i diverso da j e ai ⋅ ai ≠ 0
55
A
θ
B
Il sistema di vettori ortogonali è anche normalizzato se:
ai ⋅ a j = δ ij
cioè se:
a1 ⋅ a1 = 1, a1 ⋅ a 2 = 0 ecc..
δij rappresenta il delta di Kronecker.
Si dice Base un sistema di vettori completo ortonormale in uno spazio vettoriale se è in grado
di rappresentare qualunque vettore dello spazio.
Sistemi cartesiani ortogonali
Se indichiamo con e1 , e2 , e3 i versori degli assi cartesiani ortogonali, il vettore posizione di
un punto sarà:
x3
r = xi ei = x1e1 + x 2 e2 +...
Sistemi cilindrici
x2
z
x 1 = r cos θ
r=
x 2 = r sen θ
x
θ = arctg 2
x1
x3 = z
z = x3
x 12 + x 22
r
θ
x1
Sistemi Polari
x 1 = r sen θ cos φ
r =
x 2 = r sen θ sen φ
x
θ = arcos 3
r
x 3 = r cos θ
x i2 =
θ = arcos
x 12 + x 22 + x 32
x3
x2
x3
r
x1
x 12 + x 22
θ
x2
φ
x1
56
x1
2.2 Campi scalari e vettoriali
2.2.1 Proprietà
Ove non specificato si utilizzano le componenti cartesiane ortogonali, indicate con xi, e si fa
uso della notazione di Newton per cui gli indici ripetuti corrispondono alla sommatoria
x i yi = ∑ x i yi
i
Campi scalari
p = p(x, y, z, t) = p(xi , t)
ρ = ρ(xi , t)
T = T(xi , t)
Campi vettoriali
Sono quantità vettoriali date come funzioni di xi e t, che per componenti:
ui= ui (xj ,t)
Prodotto scalare tra campi vettoriali
Siano dati i due campi vettoriali:
Ai (xj ,t)
Bi (xj ,t)
il prodotto scalare ( ⋅) sarà:
A ⋅ B = Ai Bi = A1 B1 + A2 B2 +...
Prodotto vettoriale
Il prodotto vettoriale (× ) tra i campi vettoriali, sarà:
57
e1
A × B = A1
e2
A2
e3
A3 = e1 ( A2 B3 − B2 A3 ) + e2 ( A3 B1 − A1 B3 ) + e3 ( A1 B2 − A2 B1 )
B1
B2
B3
Prodotto diadico
r r
R =u ⊗v
Rij = ui v j
Operatore nabla
L’operatore vettoriale Nabla è definito come segue:
∇=
∂
∂
∂
∂
ei =
e1 +
e2 +
e
∂ xi
∂ x1
∂ x2
∂ x3 3
Gradiente di uno scalare
Il gradiente corrisponde all'operatore nabla applicato ad un campo scalare.
Ad esempio, per la pressione p(xi , t) si ha:
∇p =
∂p
∂p
∂p
∂p
e1 +
e2 +
e3 =
ei = grad p
∂ x1
∂ x2
∂ x3
∂ xi
Il suo modulo è il massimo cambiamento di p per unità di lunghezza dello spazio coordinato
nel punto considerato.
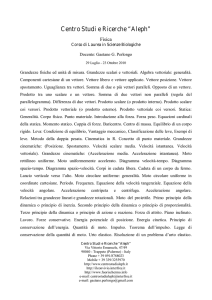
x2
isobare
pn
pn-1
linee di gradiente
x1
La sua direzione è quella nella quale si realizza il massimo cambiamento di p nel punto.
Linea di gradiente è quella che ha il gradiente tangente in ogni punto: cioè è la linea di
massima variazione. Nel caso della pressione, le linee isobare sono le linee che uniscono i
punti ad uguale pressione.
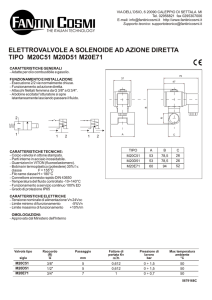
Nel campo delle quote, le linee isoipse sono le linee di livello o di uguale quota. La linea di
gradiente corrisponde quindi alla linea a massima pendenza. Le linee di gradiente sono
localmente ortogonali alle linee di livello.
58
isoipsie
(linee
di ugual quota)
linee di gradiente o
di massima pendenza
Divergenza di un campo vettoriale
Sia dato un campo vettoriale (e.g. velocità) per componenti cartesiane:
ui= ui (xj ,t)
Si dice divergenza di u l'operatore nabla applicato scalarmente ad u .
∇⋅u =
∂ ui
= div u 1
∂ xi
Rotore di un campo vettoriale
Sia dato un campo vettoriale (e.g. velocità) per componenti cartesiane.
ui= ui (xj )
Si dice rotore del campo vettoriale il prodotto vettore tra l'operatore nabla ed il campo stesso:
e1
∂
∇×B =
∂ x1
u1
e2
e3
∂ x2
∂ x3
∂
u2
∂
= rot u
u3
se u è la velocità, rot u = ω e si chiama vorticità:
⎛ ∂ u1 ∂ u 3 ⎞
⎛ ∂ u3 ∂ u 2 ⎞
⎛ ∂ u 2 ∂ u1 ⎞
⎟⎟ + e3 ⎜⎜
⎟⎟ + e2 ⎜⎜
⎟⎟
−
rot u = e1 ⎜⎜
−
−
x
x
x
x
x
x
∂
∂
∂
∂
∂
∂
2
3 ⎠
3
1 ⎠
1
2 ⎠
⎝
⎝
⎝
1
Non vale la proprietà commutativa del prodotto scalare. Ad esempio per la divergenza
∂ ui
∇ ⋅u =
= d iv u
∂ xi
∂
∂
∂
u ⋅ ∇ = ui
= u1
+ u2
+ ...
∂ xi
∂ x1
∂ x2
che risultano essere diverse
59
Laplaciano
Il Laplaciano di un campo scalare o vettoriale, è definito come segue2:
∂ ⎛ ∂ p ⎞ ∂2 p ∂2 p ∂2 p
⎜
⎟=
+
+
∇ 2 p = div grad p = ∇ ⋅ ∇ p =
∂ x i ⎜⎝ ∂ x i ⎟⎠ ∂ x 12 ∂ x 22 ∂ x 32
∇ 2 uk = ∇ ⋅ ∇uk =
∂ 2uk ∂ 2uk ∂ 2uk
∂ ∂ uk
=
+
+
∂ xi ∂ xi
∂ x 12
∂ x 22
∂ x 32
per k = 1,2,3
Divergenza di un tensore del II ordine
Sia Tij un tensore del IIo ordine (cioè una matrice, infatti il tensore del I° ordine è un vettore e
il tensore di ordine 0 è uno scalare):
T11
Tij = T21
T12
T22
T13
T23
T31
T32
T33
la div T si esprime in coordinate cartesiane
∂ Tij ∂ T1 j ∂ T2 j
=
+
+..... per j = 1,2,3
∂ xi
∂ x1 ∂ x 2
Gradiente di un vettore
r
Il gradiente di un vettore u corrisponde al prodotto diadico tra
∂u
∂
uk = − − − − − − − − − − − = k con k=1-3 ed i=1-3.
∇⊗u =
∂xi
∂xi
2.2.2 Gli integrali ed alcuni teoremi notevoli
Integrale di linea
Dato un campo vettoriale (e.g. velocità)
u = u ( xi , t )
si dice integrale di linea aperta
2
Si noti che
∇ 2 u = ∇ (∇ ⋅ u ) − ∇ × (∇ × u
) = g r a d d iv u − r o t r o t u
60
∇
e
r
u
u
b
b
∫ u ⋅ dl
dl
a
a
e di linea chiusa
∫ u ⋅ dl
u
a
dl
Integrale di superficie
∫∫ pdS → vettore
S
∫∫ u ⋅ dS → scalare
S
n
S
∫∫ u × dS → vettore
dS
S
per una superficie chiusa
n dS = d S
∫∫ pdS → vettore
ed analoghe.
Integrale di volume
∫∫∫ p dV → scalare
V
∫∫∫ u dV → vettore
V
n
Teorema di Stokes
Per campi semplicemente connessi, vale la relazione:
dS
∫ u ⋅ dl = ∫∫ (∇ × u ) ⋅ dS = ∫∫ (∇ × u ) ⋅ n dS
c
S
S
Teorema della divergenza o di Green Gauss
∫∫ u ⋅ dS = ∫∫∫ ( ∇ ⋅ u )dV
S
u
c
V
61
dl
Teorema del gradiente
∫∫ pn dS = ∫∫∫ ∇p dV
S
V
2.2.3 Solenoidalità e irrotazionalità
Condizioni di solenoidalità
La condizione di solenoidalità indica che ovunque nel campo le velocità d’espansione
Δ = ∇ ⋅u = 0
Se il campo è solenoidale, si può introdurre una funzione vettoriale di campo ψ (x ,t ) (campo
vettoriale) detto potenziale vettore
u = ∇ ×ψ
∇ ⋅ ( ∇ × ψ ) =& 0
Il campo di u così ottenuto soddisfa identicamente le condizioni di solenoidalità.
In un caso 2D, il potenziale vettore ha solo una componente che viene definita funzione di
corrente ψ. In termini delle componenti di velocità u = (u; v) la funzione di corrente rispetta
quindi le seguenti proprietà:
∂ψ
∂ψ
= −v e
=u
∂x
∂y
(2.1)
In un campo 2D, le linee di corrente sono tangenti punto per punto al vettore velocità. Di
conseguenza, l'equazione di una linea di corrente può essere determinata dalla condizione di
tangenza:
v
⎛ ∂ y⎞
=
⎜ ⎟
⎝ ∂ x ⎠ ψ =cos t u
(2.2)
La funzione ψ ( x , y ) che soddisfa la (2.2) è la funzione di corrente. Infatti, differenziando ψ e
tenendo conto della (2.1) si ha:
dψ =
∂ψ
∂ψ
dx +
dy = − v dx + u dy
∂x
∂y
e se si considera la linea di corrente
ψ = cost → dψ = 0 → − v dx + u dy = 0
62
e quindi la condizione (2.2) viene automaticamente soddisfatta.
Le linee di corrente del campo di velocità 2D sono quindi definite dalle equazioni ψ=cost
dove al variare della costante si varia la linea di corrente considerata.
Condizione di irrotazionalità
La condizione di irrotazionalità richiede che ovunque nel campo la vorticità
ϖ = ∇ ×u = 0
Se il campo è irrotazionale, si può introdurre una funzione scalare di campo (campo scalare)
detta potenziale scalare ϕ ( x , t ) , tale che:
u = ∇ϕ
∇ × ∇ ϕ =& 0
Il campo di u cosi’ ottenuto soddisfa identicamente le condizioni di irrotazionalità
63
2.3 Descrizione Euleriana e Lagrangiana del moto
Supponiamo di voler studiare l’evoluzione di una certa proprietà scalare o vettoriale di una
particella di fluido.
Per esempio assumiamo quale scalare la temperatura T(xi , t). Per conoscere l'evoluzione di T
sono possibili due diverse descrizioni o punti di vista:
1) Euleriana o spaziale (o talvolta locale), si pone un osservatore in un punto fisso P dello
spazio P(xi0) e si ottiene pertanto l'evoluzione delle proprietà T in P(xi0) cioè in una posizione
fissa.
2) Lagrangiana o sostanziale o molecolare, si pone l'osservatore sulla particella di
fluido e si studia quindi l'evoluzione delle proprietà T[xi (t)] di una particella di fluido che
mantiene la sua individualità durante il moto.
Consideriamo come esempio fisico il problema della Temperatura del fluido in prossimità
delle emissioni di fumi da una ciminiera.
Nella descrizione EULERIANA si pone un osservatore della proprietà temperatura (ad
esempio un termometro) all'apertura della ciminiera e si misura la T( xi0 , t). L'uso di molti
termometri (teoricamente una matrice 3D) consente di ottenere le T( xi0 , t) in tutto il campo di
interesse. Per conoscere la temperatura nel tempo di una certa particella TA(t) è necessario
conoscere la posizione spaziale occupata dalla particella (A) nei diversi istanti temporali.
Nella descrizione LAGRANGIANA si associa una sonda in temperatura (ad esempio un
cristallo liquido termosensibile in sospensione nelle particelle fluide) ad una particella A e si
misurano le temperature di questa nel suo moto. Si ottiene in tal modo TA(t) per conoscere il
campo di temperature nel tempo è necessario associare molte sonde a diverse particelle e
poter riconoscere le loro posizioni nei diversi istanti di tempo.
64
Per il rilievo sperimentale di grandezze fluidodinamiche la descrizione EULERIANA è assai
più pratica in quanto consente di mantenere i sensori fissi. Inoltre anche da un punto di vista
numerico e teorico tale descrizione è più conveniente in quanto nelle applicazioni fisiche ed
ingegneristiche il fluido entrante interagisce con i corpi solidi e quindi fluisce verso l'esterno
(si pensi ad esempio ad una turbina, ad un compressore, oppure ad un veicolo o un velivolo
posto in galleria aereodinamica).
2.4 Derivata sostanziale
Se un osservatore EULERIANO conosce il campo di T (xi, t) all'interno di un certo volume di
fluido V può calcolare il differenziale totale dT:
dT =
∂T
∂T
dxi +
dt
∂ xi
∂t
(2.3)
x3
T’(t+dt)
x2
dxi
T(t)
V
x1
Se in particolare calcoliamo il differenziale totale in modo che dxi=ui dt se cioè scegliamo lo
spostamento in modo da seguire la particella nel suo moto, l'espressione precedente diventa:
dT =
∂T
∂T
ui dt +
dt
∂ xi
∂t
(2.4)
ed è quindi possibile calcolare la derivata totale rispetto al tempo che ha la particolarità di
seguire la particella nel suo moto. Tale derivata viene detta derivata sostanziale e si indica
convenzionalmente con
D
.
Dt
La (2.4) diventa allora:
65
∂T
DT ∂ T
=
ui +
∂t
Dt ∂ xi
∂T
DT
∂T
in cui
rappresenta la derivata sostanziale, ui
è la derivata convettiva,
è la
∂ xi
∂t
Dt
derivata locale rispetto al tempo.
DT
, cioè la derivata totale
Si noti che da un punto di vista EULERIANO per conoscere la
Dt
in senso LAGRANGIANO è necessario conoscere in un punto le derivate locali rispetto al
∂T
più ∇T ed il vettore
tempo delle quantità di interesse (e.g. la temperatura T), e cioè
∂t
velocità u .
Se sostituiamo lo scalare T con un vettore ad esempio u la sostanza rimane invariata.
Ad esempio l'accelerazione a in una descrizione LAGRANGIANA è:
a=
du
dt
mentre in una descrizione EULERIANA sarà:
a=
Du
∂u
∂u
= ui
+
∂ xi
∂t
Dt
o per componenti cartesiane
ak=
D uk
∂ uk
∂ uk
= ui
+
Dt
∂ xi
∂t
k = 1,2,3
Bisogna osservare che:
il moto si dice stazionario o permanente se:
∂u
= 0 → u = u ( xi )
∂t
ovvero, se la velocità non cambia nel tempo in un punto generico del campo, ciò non equivale
ad una accelerazione nulla delle particelle;
il moto si dice uniforme se:
∂
= 0 → u = u (t )
∂ xi
66
2.5 Linee di corrente, traiettorie, linee di fumo
2.5.1 Definizioni
1. Linee di corrente
Sono quelle che hanno come tangente in ogni punto il vettore velocità. Si noti che data la
tangenza della u , le linee di corrente sono linee attraverso le quali non si ha passaggio di
fluido. Pertanto, il flusso tra due linee di corrente si comporta come se scorresse tra le pareti
di un tubo a sezione variabile. Per poterle visualizzare, si fa una breve posa fotografica che
dia i vettori u (il campo vettoriale) e si disegnano le linee tangenti.
u
u
u
u
2. Traiettorie
E' il percorso seguito dalle particelle considerate nel tempo. Per visualizzarle, si può ricorrere
ad esempio ad una macchina fotografica ponendo l'otturatore a posa lunga (2 Δt) e si illumina
il campo d'interesse essendo una particella immersa ad esempio al tempo t0.
A
A
t0
t0+Δt
A
τ0+2Δt
67
3. Linee di fumo
Sono quelle linee che in un dato istante t=t0 occupano le particelle emesse nei tempi
precedenti dallo stesso punto. Si ricordi il fumo di una sigaretta o linee di traccianti in liquidi.
D
C
B
t0
A
t0
t0
emessa a 3Δt
emessa a 2Δt
emessa ad un
t0
istante di
è bene notare che in condizioni stazionarie le linee di corrente, di fumo e le traiettorie
coincidono. In condizioni non stazionarie sono diverse.
2.5.2 Relazione tra linee di corrente e linee equipotenziali
Per un campo di velocità u ( x, y) , bidimensionale, irrotazionale e solenoidale, possiamo
definire sia il potenziale scalare ϕ che la funzione di corrente ψ. Come detto sopra, le linee
di corrente sono definite come:
ψ ( x , y ) = cost
mentre le linee equipotenziali, sono:
ϕ ( x , y ) = cost
Chiamiamo con s il versore tangente ad una linea equipotenziale, essendo s la coordinata
curvilinea lungo di essa. Dalla definizione di potenziale si ha:
∇ϕ || u
Per cui, tenendo conto che lungo una linea equipotenziale dϕ = 0 , si ha:
s ⋅ ∇ϕ =
∂ϕ
=0
∂s
68
Poichè il prodotto scalare s ⋅ ∇ ϕ è nullo, significa che i due vettori sono ortogonali tra loro,
e quindi la linea ϕ = cost è perpendicolare a u .
Per definizione di funzione di corrente (relazione 2.2), la linea di corrente è invece tangente
alla velocità. Di conseguenza le linee di corrente possono solo essere perpendicolari alle linee
equipotenziali.
Questo risultato può essere determinato in maniera analitica tenendo conto della definizione
2.2, e ricordando, dalla definizione di ϕ che:
dϕ =
∂ϕ
∂ϕ
dx +
dy =udx + vdy
∂x
∂y
da cui, possiamo ricavare l'analoga della (2.2) per il potenziale:
u
⎛ dy ⎞
=−
⎜ ⎟
⎝ dx ⎠ ϕ = cost
v
(2.5)
Confrontando (2.2) con (2.5), si vede come tali relazioni rappresentino il coefficiente angolare
di due rette (rispettivamente tangenti alle linee ψ=cost e ϕ =cost) perpendicolari tra loro.
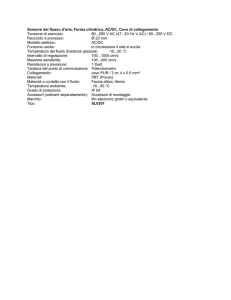
2.5.3 Significato fisico della funzione di corrente
Dalla descrizione delle linee di corrente La variazione dψ della funzione di corrente,
corrispondente, come detto, al passaggio da una linea di corrente di equazione ψ(x,y)=ψ1 ad
un'altra di equazione ψ(x,y)=ψ2 = ψ1 + d ψ, rappresenta la portata di fluido per unità di massa
(portata volumetrica), che scorre attraverso le due linee di corrente ψ1 e ψ2 .
Consideriamo quindi in un campo di velocità 2D, incompressibile e stazionario, le due linee
di corrente ψ ( x , y ) = ψ 1 e ψ ( x , y ) = ψ 2 = ψ 1 + dψ :
ψ1
C
ψ2
dy
dl
ψ3
A
dx
B
dQ
69
Consideriamo un linea dl che unisce due punti generici rispettivamente su ψ1 e ψ2.
Costruiamo il triangolo ABC dalla proiezione di dl lungo gli assi x e y essendo il lato AB pari
a dx mentre il lato BC è pari a dy.
Consideriamo anche la linea di corrente ψ3 passante per il punto B e le portate che entrano o
escono dal triangolo ABC. Attraverso il lato AC la portata è entrante ed è definita come dQ.
Per i lati AB e BC, tenendo conto che le componenti tangenziali ai lati non danno contributo
alla portata, si ha:
•
Portata entrante attraverso AB = v dx
•
Portata uscente attraverso BC = u dy
Poichè la massa si conserva nel trangolo chiuso ABC, la portata entrante deve essere uguale a
quella uscente, e cioè:
dQ + vdx = udy ⇒ dQ = udy − vdx
e, ricordando la (2.1), si ha
dQ = dψ
2.6 Volume di controllo e sistema
Le equazioni della fisica che governano l'evoluzione e il moto dei fluidi (in particolare: la
conservazione della massa, le leggi della dinamica e della termodinamica) possono essere
applicate in un'ottica LAGRANGIANA dando luogo al concetto di sistema od EULERIANA
dando luogo al concetto di volume di controllo.
Si definisce sistema un insieme di materia composto sempre dalle stesse particelle, il quale si
può muovere ed interagire con l'ambiente circostante; se il sistema è fluido, potrà variare di
forma, posizione e dimensioni.
Il volume di controllo è un volume dello spazio (entità geometrica indipendente dalle masse)
attraverso il quale può scorrere il fluido.
70
2.7 Teorema del trasporto di Reynolds
Sussiste il problema che le leggi di conservazione alla base della fluidodinamica possono
essere scritte (valgono) per i sistemi (ad esempio la massa di un certo sistema si conserva); al
contrario per le applicazioni di ingegneria dobbiamo definire l'interazione tra fluido e solido
all'interno di un certo volume di controllo. Il teorema del trasporto di Reynolds ci consente di
passare da un sistema a un volume di controllo con le varie leggi considerate.
Le leggi di governo della fluidodinamica, possono essere formulate in termini di varie
quantità fisiche (e.g. velocità u , quantità di moto m u , temperatura T, densità ρ, ecc.). è
intuitivo che non tutte queste quantità presentano le stesse caratteristiche: infatti, alcune
dipendono dalla massa del sistema considerato (come la quantità di moto, l'energia cinetica, la
massa stessa, ecc.) altre non dipendono dalla massa (come la velocità, la temperature, la
pressione, ecc.). Le proprietà che dipendono dalla massa sono dette estensive, le
corrispondenti non dipendenti dalla massa sono dette intensive.
Indichiamo con B una generica grandezza estensiva caratterizzante un campo fluidodinamico
e con b il suo valore per unità di massa, cioè intensivo.
Ad esempio:
-
B = m = massa
m
b= =1
m
u2
B=m
= energia cinetica
2
u2
b=
= energia cinetica per unità di massa
2
B = mu = quantità di moto
-
b = u = velocità
-
B è una proprietà estensiva
b è una proprietà intensiva (valore specifico)
Si noti che alcune proprietà intensive non hanno valore estensivo (ad esempio la temperatura)
cioè non aumentano all'aumentare della massa considerata. Proprietà intensive che presentano
un corrispondente estensivo si dicono anche specifiche.
Le proprietà estensive Bs del sistema all'istante t sono definite matematicamente come:
Bs =
∫∫∫ b ρ dV
(2.6)
Vs
essendo s il sistema considerato e Vs il volume da esso occupato all'istante t.
71
Poichè le leggi di conservazione valgono per un sistema, lo scopo della dimostrazione del
teorema del trasporto di Reynolds, è di calcolare la derivata totale rispetto al tempo di Bs cioè
del sistema che deve essere seguito nel suo moto.
Per definizione
DBs
B (t + δ t ) − Bs (t )
= lim s
Dt δ t→0
δt
(2.7)
dove Vs cambia con il moto, cioè dipende dal tempo.
Si vuole dimostrare3 che:
DBs
∂ (ρ b )
⎧ ∂ (ρ b )
⎫
= ∫∫∫
+ ∇ ⋅ (ρ bu )⎬dV
dV + ∫∫ ρbn ⋅ u dS = ∫∫∫ ⎨
∂t
∂t
Dt
⎭
V0
S0
V0 ⎩
essendo V0 il volume d'integrazione al tempo t fisso, cioè il volume di controllo. Si noti che in
(2.7):
Bs (t + δ t) =
∫∫∫ ρ(t + δt ) b(t + δt )dV
VS (t + δ t)
vu
vi
u
uδt
n
u
uδt
dS
dS
n
v0
3
Si noti la formula di derivata sotto il segno di integrale, vista nell'analisi:
d
dt
h(t)
∫
g (t)
h(t )
f ( x , t ) dx =
∂ f
dh
dg
dx +
f ( h ( t ), t ) −
f ( g ( t ), t )
∂
t
dt
dt
g (t)
∫
essa costituisce la forma monodimensionale del teorema del trasporto di Reynolds che si intende dimostrare nel
seguito.
72
per cui si ha:
⎞
⎛
⎞ ⎫⎪
DBs
1 ⎧⎪⎛⎜
⎟
⎜
⎟⎬
= lim
+
−
+
...
...
...
...
⎨
∫∫∫
∫∫∫
∫∫∫
⎟
⎜
⎟⎪
Dt δ t→0 δ t ⎪⎜⎝ ∫∫∫
Vu
Vi
⎠ t +δ t ⎝ V0
⎠t ⎭
⎩ V0
DBs
1
= lim
δ t →0 δ t
Dt
1
lim
δ t →0 δ t
⎧⎪⎛
⎞
⎛
⎞ ⎫⎪
− ⎜ ∫∫∫ b(t ) ρ (t )dV ⎟ ⎬ +
⎨⎜⎜ ∫∫∫ b(t + δ t ) ρ (t + δ t )dV ⎟⎟
⎜
⎟⎪
⎪⎩⎝ V0
⎠ t +δ t ⎝ V0
⎠t ⎭
(2.8)
⎧⎪⎛
⎞
⎛
⎞ ⎫⎪
⎜
⎟
⎜
⎟ ⎬ = A+G
+
+
−
b
(
t
δ
t
)
ρ
(
t
δ
t
)
dV
b
(
t
)
ρ
(
t
)
dV
⎨⎜ ∫∫∫
⎟
⎜ ∫∫∫
⎟ ⎪
⎪⎩⎝ Vu
V
⎠ t +δ t ⎝ i
⎠t ⎭
Per il termine A si ha:
⎧⎪ b(t + δ t ) ρ (t + δ t ) − b(t ) ρ (t ) ⎫⎪
∂ ( ρ b)
A = lim ⎨∫∫∫
dV ⎬ = ∫∫∫
dV
δ t →0
δt
⎪⎩ V0
⎪⎭ V0 ∂ t
(2.9)
per il termine G si ha che per δ t → 0
dVu = dS n ⋅ u δ t
dVu = − dS n ⋅ u δ t
e quindi
⎫
⎧ b(t + δ t) ρ(t + δ t) n ⋅ u δ t + b(t) ρ(t) n ⋅ u δ t
∫∫
⎪⎪
⎪⎪ ∫∫
S
Si
G = lim ⎨ u
dS ⎬ =
δ t →0
δt
⎪
⎪
⎪⎭
⎪⎩
= ∫∫ ρbn ⋅ u dS
S0
pertanto
DBs
∂ (ρ b )
= ∫∫∫
dV + ∫∫ ρbn ⋅ u dS
Dt
∂
t
V0
S0
73
(2.10)
Altre forme del teorema del trasporto di Reynolds4
sono le seguenti:
∂ ( ρ b)
DBs
= ∫∫∫
dV + ∫∫∫ ∇ ⋅ ( ρbu )dV =
∂
Dt
t
V0
V0
⎡ ∂ ( ρ b)
⎤
⎡ D ( ρ b)
⎤
= ∫∫∫ ⎢
+ ∇ ⋅ ( ρbu )⎥dV = ∫∫∫ ⎢
+ ρb∇ ⋅ u ⎥dV
⎥⎦
⎥⎦
V0 ⎢
V0 ⎢
⎣ ∂t
⎣ Dt
(2.11)
Si noti che, se per una qualsiasi equazione di conservazione della generica proprietà fisica BS
per un sistema in moto, vale la relazione:
dBs
=0
dt
(2.12)
consegue immediatamente che
⎡ ∂ ( ρ b)
⎤
+
∇
⋅
ρ
bu
(
)
⎥dV =0
⎢
∫∫∫
⎥⎦
V0 ⎢
⎣ ∂t
(2.13)
e data l'arbitrarietà del sistema di materia scelto Vs(t) all'istante t e quindi il corrispondente
volume di controllo V0 deve valere anche la corrispondente equazione in termini differenziali:
∂ ( ρ b)
+ ∇ ⋅ ( ρbu ) = 0
∂t
4
(2.14)
Per il teorema di Green
∫∫ u ⋅ n dS = ∫∫∫ ∇ ⋅ u dV
S
V
∫∫ ( Lu ) ⋅ n dS = ∫∫∫ ∇ ⋅ ( Lu ) dV
S
V
con L generica quantità scalare (o anche vettoriale). Si ha anche
G =
∫∫∫
∇ ⋅ ( ρ b u )d V
V0
74
I termini A e G della (2.8) possono ovviamente anche essere scritti come:
A=
∂ ( ρ b)
∂
ρ
bdV
=
dV
∫∫∫
∂ t ∫∫∫
∂t
V
V
0
(2.15)
0
G = ∫∫ ρ b n ⋅ u dS
(2.16)
S0
e la derivata assume la forma di D cioè di derivata sostanziale:
Dt
DBs ∂
=
ρ bdV + ∫∫ ρbn ⋅ udS
D t ∂ t ∫∫∫
V0
S0
(2.17)
Come detto è possibile con tali relazioni passare dall'approccio in termini di volume di
controllo all'approccio in termini di sistema, e viceversa.
In particolare il termine a sinistra del segno = della 2.17 esprime la variazione nel tempo di
una proprietà estensiva del sistema. La 2.15 rappresenta le variazioni nel tempo delle
proprietà nel volume di controllo. La 2.16 rappresenta il flusso totale della proprietà
attraverso la superficie di controllo S0. Il flusso è positivo per fluido uscente ( n e u concordi)
e negativo per flusso entrante.
75
2.8 Analisi del moto di una particella
Consideriamo una particella di fluido con baricentro in G(0,0,0) all'istante t=t0 e consideriamo
un elemento di fluido generico A che si trova nel punto P di coordinate ξi cioè distante
ξi2
da G. Quindi all’istante t=t0 si ha
G=(0,0,0)
P(ξi)
In un intervallo di tempo Δt (piccolo) la particella si sposterà e si deformerà e l'elemento di
fluido A, che era posizionato in P, andrà ad occupare il punto P’:
P’
G’
P
P
G
r
G
ξ
PP' = u Δt
In generale la velocità di un generico elemento di fluido A sarà:
u ≠ uG
r
r
u( xk ) ≠ uG ( xGk )
r
r
u( xk ) = u ( xGk + ξ k )
e potrà essere espressa nell'ottica di uno sviluppo in serie di Taylor troncata al primo ordine
r
intorno a G, che ora genericamente sarà posizionato in xG , come:
u = uG +
∂u
ξ
∂ xk k
Per componenti cartesiane:
ui = uGi +
∂ ui
ξ
∂ xk k
76
⎡∂
⎢
⎢∂
∂
[u i ] = [u Gi ] + ⎢
⎢∂
⎢∂
⎢
⎣⎢ ∂
u1
x1
u2
x1
u3
x1
∂
∂
∂
∂
∂
∂
u1
x2
u2
x2
u3
x2
∂
∂
∂
∂
∂
∂
u1
x3
u2
x3
u3
x3
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦⎥
⎡ξ1 ⎤
⎢ ⎥
⎢ ⎥
⎢ξ 2 ⎥
⎢ ⎥
⎢ ⎥
⎢⎣ ξ 3 ⎥⎦
∂ ui
(tensore del II ordine), può essere scomposta in
∂ xk
La matrice di velocità di deformazione
una matrice emisimmetrica
⎡ 1 ⎛ ∂u ∂u
ui = uGi + ⎢ ⎜⎜ i − k
⎣ 2 ⎝ ∂xk ∂xi
Ωik più una simmetrica ε ik :
⎞ 1 ⎛ ∂ui ∂u k
⎟⎟ + ⎜⎜
+
⎠ 2 ⎝ ∂xk ∂xi
⎞⎤
⎟⎟⎥ξ k
⎠⎦
(2.18)
ui = uGi + uRi + udi = uGi + Ωik ξk + εik ξk
Come vedremo
deformazione.
(2.19)
uR è la velocità dovuta alla rotazione e ud è quella dovuta alla
2.8.1 Traslazione
La velocità di traslazione è quella associata al baricentro e quindi è uguale a
uGi
2.8.2 Rotazione
x3
x2
P1
x1
P
θ
La velocità dovuta alla rotazione intorno al baricentro è espressa dal termine
77
Ωik ξk :
⎡
0
⎢
⎢
1 ⎛ ∂ ui ∂ uk ⎞
1 ∂ u 2 ∂ u1
⎟⎟ ξ k = ⎢
−
−
Ω ik ξ k = ⎜⎜
∂ xi ⎠
2 ⎝ ∂ xk
2 ⎢ ∂ x1 ∂ x 2
⎢∂ u
∂ u1
3
⎢
−
⎢⎣ ∂ x 1 ∂ x 3
∂ u1 ∂ u 2
−
∂ x 2 ∂ x1
0
∂ u3 ∂ u2
−
∂ x2 ∂ x3
∂ u1 ∂ u 3 ⎤ ⎡ ξ1 ⎤
−
∂ x 3 ∂ x 1 ⎥⎥ ⎢ ⎥
∂ u2 ∂ u3 ⎥ ⎢ ⎥
⎢ξ ⎥
−
∂ x3 ∂ x 2 ⎥ ⎢ 2 ⎥
⎥ ⎢ ⎥
⎥ ⎢ξ ⎥
0
⎥⎦ ⎣ 3 ⎦
(2.20)
ma questo è proprio uguale a:
− ω3
ω 2 ⎤ ⎡ξ 1 ⎤
⎡ 0
1⎢
0
Ω ik ξ k =
ω3
− ω 1 ⎥ ⎢ξ 2 ⎥ ⇒
⎢
⎥ ⎢ ⎥
2
0 ⎥⎦ ⎢⎣ξ 3 ⎥⎦
ω1
⎢⎣ − ω 2
1
u R = [(ω 2ξ 3 − ω 3ξ 2 )e1 + (ω 3ξ 1 − ω 1ξ 3 )e 2 + (− ω 2ξ 1 + ω 1ξ 2 )e 3 ]
2
(2.21)
ma allora si ha che:
uR =
1
1
ω ×ξ = ∇ ×u ×ξ
2
2
infatti
e2
e2 ⎤
⎡ e1
1
1⎢
ω ×ξ =
ω1 ω 2 ω 3 ⎥ =
⎢
⎥
2
2
⎢⎣ ξ 1 ξ 2 ξ 3 ⎥⎦
1
= [(ω 2ξ 3 − ω 3ξ 2 )e1 + (ω 3ξ 1 − ω 1ξ 3 )e 2 + (− ω 2ξ 1 + ω 1ξ 2 )e 3 ]
2
(2.22)
e l'ultimo termine della (2.21) è uguale all'ultimo termine della (2.22).
Ad esempio:
u R1 =
1
(ω 2 ξ 3 − ω 3ξ 2 )
2
che rappresenta la componente su e1 della (2.22), ed analogamente per le tre componenti.
Possiamo introdurre il vettore ζ che dà la velocità angolare media delle particelle, ed è
definito come:
78
r
1 r
2
ζ = ω=
r
1 r
[e1ω 1 + er2ω 2 + er3ω 3 ] = 1 ∇ × ur
2
2
(2.23)
per cui ad esempio, la componente lungo e1 di ζ , cioè la rotazione intorno all'asse x1, sarà:
ζ1 =
1
1 ⎛ ∂ u3 ∂ u2 ⎞
⎟
−
ω1 = ⎜
2
2 ⎝ ∂ x2 ∂ x3 ⎠
L'eq. (2.18) può quindi essere scritta come:
r r rr r
r r
u = uG + ζ × ξ + ε ⋅ ξ
o, per componenti
(
)
r r
u i = u Gi + ζ × ξ i + ε ik ξ k
essendo
ζ ×ξ =
1
(∇ × u )× ξ = 1 ξ k ⎛⎜⎜ ∂ u i − ∂ u k ⎞⎟⎟
2
2 ⎝ ∂ x k ∂ xi ⎠
In conclusione, la parte emisimmetrica dà l'effetto delle rotazioni delle particelle e la parte
simmetrica tiene conto dell'effetto della deformazione.
La (2.18) può quindi essere scritta come:
ui = uGi + uRi + udi
cioè come la velocità del baricentro più una velocità dovuta alla rotazione intorno al
baricentro più una velocità dovuta alla deformazione:
uGi = velocità di traslazione del baricentro
r
u Ri = (ζ × ξ )i = velocità dovuta alla rotazione
udi = ε ik ξk = velocità dovuta alla deformazione pura
79
Esempio di rotazione pura
x2
Moto piano
∂
u3 = 0
= 0 ω1 = ω2 = 0
∂ x3
θ
P
⎛ ∂ u 2 ∂ u1 ⎞
⎟ = 2ζ 3
rotu = ω 3 = ⎜
−
⎝ ∂ x1 ∂ x 2 ⎠
θ=ζt
P’
r
posizione al tempo t essendo
x1=r cosθ = r cos (ζ t)
x2=r senθ = r sen (ζ t)
u1= - r ζ sen (ζ t)
u2= r ζ cos (ζ t)
x1
dθ
=ζ
dt
u1= - r ζ sen (ζ t) = -x2ζ
u2= r ζ cos (ζ t) = x1ζ
∂u 1
∂u 2
= −ζ
= ζ,
∂x 2
∂x1
ω 3 = ζ − ( − ζ ) = 2ζ → ζ =
ε 12 =
1 ⎛ ∂u 1 ∂u 2
⎜
+
∂x1
2 ⎜⎝ ∂ x 2
ω3
2
⎞
⎟⎟ = 0
⎠
2.8.3 Deformazione
Vediamo ora l'effetto della deformazione u d i = ε ik ξ k
dilatazione pura e di uno scorrimento.
Dilatazione pura
Ipotizziamo che
ε 11 ≠ 0
e i termini ε ii per i ≠ 1 e j ≠ 1 siano nulli.
B
C u1 +
0
A
∂u1
∂x1
δx1
0
80
∂u1
∂x1
δx1δt
A’
come sovrapposizione di una
La differenza di velocità produce nell'intervallo Δt una deformazione (allungamento)
dell'elemento pari a
∂ u1
δx Δ t
∂ x1 1
La variazione del volume δ V = δ x 1δ x 2 δ x 3 è:
ΔV =
∂ u1
δx 1 δx 2 δx 3 Δt
∂ x1
La variazione nel tempo per unità di volume del volume δV (variazione relativa di volume)
∂ u1
per effetto del gradiente di velocità
, è':
∂ x1
⎛ ∂ u1 ⎞
Δt⎟
⎜
⎝ ∂ x1
⎠
∂ u1
1 ΔV
= lim
=
Δt → 0
δV Δ t
∂ x1
Δt
Se estendiamo queste considerazioni a x2 e x3, tenendo conto che ora ε 22 ≠ 0 e ε 33 ≠ 0
otteniamo:
∂u 2
∂x2
B’
δ x 2δ t
A’
∂u1
∂x1
δx1δt
Quindi la variazione relativa di volume per unità di tempo (velocità di dilatazione Δ) è,
trascurando i termini di ordine superiore:
Δ
r r
∂ u1 ∂ u 2 ∂ u3
∂ ui
1 ΔV
=
+
+
=
= ∇ ⋅u
δV Δt
∂ xi
∂ x1 ∂ x 2 ∂ x 3
r
Cioè la divergenza di u è la velocità di dilatazione volumetrica.
r r
Se ∇ ⋅ u = 0 il flusso è incomprimibile cioè la particella di fluido non cambia di volume nel
r r
moto. Si ricorda che la ∇ ⋅ u = 0 corrisponde matematicamente alla condizione di
solenoidalità del campo di velocità.
81
Scorrimento
∂u1
∂x2
Sia per ipotesi:
δx 2 δt
ε 12 = ε 21 ≠ 0
u2
e le altre componenti siano nulle1.
u2 +
u1
0
∂u 2
∂x1
Δβ
δx1
A
B’
A’
Δα
∂u 2
∂x1
δx1δt
0
Definiamo l'angolo Δγ :
∂ u2
∂ u1
Δγ = Δα − Δβ =
Δt +
Δt
∂ x1
∂ x2
essendo (per convenzione) Δγ positivo se l'angolo si riduce.
La deformazione per taglio, sarà:
Δγ
lim
velocità di deformazione di taglio o di scorrimento essendo:
Δt → 0 Δ t
∂ u 2 δx1
Δt
∂ x1 δx1
∂ u1 δ x 2
Δ β ≈ tg ( Δ β ) = −
Δt
∂ x 2 δx 2
Δ α ≈ tg ( Δ α ) =
lim
Δt → 0
∂ u1
∂ u2
∂ u1 ⎞
1 ⎛ ∂ u2
Δγ
⎟⎟ Δt =
⎜⎜
+
= 2ε 12
= lim
+
Δt → 0 Δt
Δt
∂ x1
∂ x2
∂ x2 ⎠
⎝ ∂ x1
Quindi è evidente che i termini nella diagonale sono i responsabili delle deformazioni assiali
(dilatazione volumetrica del sistema) mentre quelli fuori diagonale delle deformazioni per
taglio. La ε ik si può scomporre in 3+6 matrici del tipo:
⎡ ε 11
⎢
⎢ 0
⎢⎣ 0
1
0
0
0
0⎤
⎥
0⎥ +
0 ⎥⎦
⎡0
⎢
⎢0
⎢⎣ 0
ε 12
0
0
0⎤
⎥
0⎥ +
0 ⎥⎦
La velocità angolare ζ3 è per definizione:
⎡0
⎢
⎢0
⎢⎣ 0
0
ε 13 ⎤
0
0
0
0
ς 3 = lim
Δt → 0
⎥
⎥ + .....
⎥⎦
1 ⎛ Δα
Δ β ⎞ 1 ⎛ ∂ u 2 ∂ u1 ⎞
−
+
⎜
⎟ = ⎜
⎟
2 ⎝ Δt
Δ t ⎠ 2 ⎝ ∂ x1 ∂ x 2 ⎠
ed analoghe, come già dimostrato. Nel presente caso ζ3=0 perché
82
∂ u2
=
∂ x1
∂u1
∂x 2
Si può pertanto osservare che ε ik può essere decomposto in Dik+Wik essendo Dik diagonale
e Wik avendo solo i termini fuori della diagonale.
Ed inoltre può essere scomposta in 3+3 matrici corrispondenti ciascuna ad una deformazione
elementare. Si noti che l'invariante elementare di ε ik è la divergenza delle velocità:
∂ u1 ∂ u 2 ∂ u 3 ∂ u i
ε ii =
+
+
=
∂ x1 ∂ x 2 ∂ x 3 ∂ x i
e quindi qualunque deformazione si può ottenere come somma di 3 dilatazioni elementari + 3
deformazioni di taglio elementari.
Esiste quindi un invariante lineare:
r r
∂ ui
I = ε ii =
= ∇ ⋅u
∂ xi
che non dipende dagli assi di riferimento.
La matrice ε ik è simmetrica ed esistono pertanto tre assi principali rispetto ai quali può essere
diagonalizzata :
⎡ ε '11
⎢
⎢ 0
⎢⎣ 0
0
ε ' 22
0
0 ⎤
⎥
0 ⎥
ε ' 33 ⎥⎦
La quadrica della deformazione: Poniamoci nel riferimento principale. Sappiamo che per deformazioni pure
r
ω d = 0 cioè il campo di deformazione pura è irrotazionale ed ammette pertanto un potenziale scalareφ. Infatti:
ε ik = 0 i ≠ k
ε ii ≠ 0 = bi
ε ik = b k δ ki
r
∂φ
r
con il potenziale
u = ∇ φ ovvero per componenti u i =
∂x i
φ =
1
1
b k x k2 = (b1 x 12 + b 2 x 22 + b 3 x 32 )
2
2
che ha la forma di una quadrica. Quindi, poichè:
u1 =
∂φ
∂φ
∂φ
= b1 x 1 , u 2 =
= b2 x 2 , u 3 =
= b3 x 3
∂x1
∂x 2
∂x 3
si ha che:
1 ⎛ ∂u1 ∂u 2 ⎞
1 ⎛ ∂ b1 x 1 ∂ b 2 x 2 ⎞
+
+
⎜
⎟ = ⎜
⎟ = 0
∂x1 ⎠ 2 ⎝ ∂x 2
∂x1 ⎠
2 ⎝ ∂x 2
ed anche ε 13 = ε 23 = 0 .
Al contrario:
2 ∂ 2φ
= b1
ε 11 =
2 ∂ x 12
ε 12 =
ed anche ε 22 = b 2 e ε 33 = b 2 . Se poniamo
83
φ=
1
b k x k2 = φ P (valore nel punto P )
2
si ottiene l'equazione di una quadrica a centro (ellisoide o iperboloide) passante per P:
P'
P
_
r
Per valutare le componenti di PP (spostamento) secondo l
_
r
r r
(PP’)l= PP ' ⋅ l = u ⋅ l Δ t
∂φ ∂ x k
∂φ
⋅
=
∂e
∂ xk ∂ e
∂φ
Se er è tangente alla superfice
= 0 essendo φ = φ P = cos t . , lo spostamento vettoriale del punto P è
∂e
u l = u k cos( x k θ l ) =
sempre normale alla giacitura locale della quadrica ed il modulo della velocità è calcolabile come:
r
u
2
⎛ ∂φ ⎞
= u = Σ⎜
⎟
i = 1⎝ ∂ x ⎠
i
2
i
3
2
84
2.9 Tensore delle tensioni
Si vuole dimostrare che gli sforzi interni ad un fluido, che caratterizzano totalmente lo stato
tensionale in un punto, sono 9. Questi, costituiscono il tensore delle tensioni T
-
Tn
Tn
n
n
+
-
+
Sulla superficie δS sarà applicata una forza δFn
Tn =
δ Fn
δS
(2.25)
Per fluidi fermi T n = − p n con n che caratterizza le giaciture della S. Si dimostrerà che per
un fluido in moto,
la T relativa ad una giacitura n è combinazione degli sforzi T1 , T2 , T3 relativi a 3 direzioni
principali della terna di riferimento prescelte.
Se scegliamo un piano normale a x1
T1 = T1K .e K
T11 + T12 + T13 = T1
(2.26)
Moltiplicando scalarmente le (2.26) per ek , si ha:
T11 e1 + T12 e2 + T13 e3 = T1
T1 ⋅ ek = T1k
x3
e analogamente per le altre 2 direzioni.
T1
n1
T11
x2
T13
T12
x1
85
2.9.1 Tetraedro di Cauchy
Cerchiamo ora di generalizzare questi concetti: prendiamo un tetraedro di fluido che è in
equilibrio sotto l'effetto delle forze di volume e di superficie.
x3
n1
n2
n
x2
n3
x1
La risultante delle forze di superficie Fs , è
Fs = T S + Ti S i
(2.27)
ma ni = −ei e quindi, riferendosi ad ei
Fs = T S + (∑ (− Ti S i ))
Per la legge di conservazione della quantità di moto (Ι° principio della dinamica)
F tot = ma
F s + m g = ma
La massa è data da:
h
m=ρ S
3
con h altezza del tetraedro. Si ha quindi:
T S − ∑ T i Si = ρ
(
h
S a−g
3
)
da cui, dividendo per S e passando al limite per h → 0 , si ottiene:
86
(
)
⎧
⎫
S
h
lim⎨T − ∑ T i i − ρ a − g ⎬ = 0
h →0
Sn
3
⎩
⎭
S
T − ∑ Ti i = 0
Sn
(
)
Si
= cos n ^ x i = n ⋅ ei = cni dove cni indicano i coseni direttori di n su ei . Si ottiene
Sn
quindi:
ma
T = ∑ cni Ti = ∑ n ⋅ ei T i = ∑ n ⋅ eiTik ek = Tik ei ek ⋅ n
i
(2.28)
i
In cui T sono gli sforzi relativi alla generica faccia di normale n , mentre Ti rappresenta lo
sforzo relativo alla ei cioè alla faccia di normale ni .
Se consideriamo la faccia di normale n1 , lo sforzo T1 può essere scomposto nelle 3
componenti per proiezione su ek (k=1, 2, 3) e si ottengono, come già detto, le 3 componenti
del tensore delle tensioni
T11 , T12 , T13
e cioè
T1k = T1 ⋅ ek
(2.29)
In generale quindi:
Tik = Ti ⋅ ek
con i=1,2,3 e k=1,2,3 .
(2.30)
Mediante la (2.28), si dimostra che lo stato tensionale rispetto ad una generica giacitura, è
definito dalle tensioni agenti sulle tre giaciture n1 , n 2 e n3 . Inoltre, dalla 2.29 la tensione su
una giacitura i è esprimibile attraverso le 3 componenti Tik e le 3 componenti cartesiane sulla
giacitura generica nk sono date da:
Tk = T ⋅ e k = cn i T i ⋅ e k = c ni Tik = n ⋅ e i Tik ⇒ T = T ⋅ n
(2.31)
r
r
⇒ cniTik ek = T
Pertanto le 9 quantità Tik definiscono completamente le tensioni intorno ad un punto in quanto
come dimostrato da (2.31) la tensione in qualunque altra giacitura generica n può essere
valutata mediante la (2.31), noti i coseni direttori di n rispetto a e i .
87
La forma delle componenti del tensore delle tensioni al variare della terna di riferimento, viene
fornita coma nota 6.
2.9.2 Simmetria del tensore delle tensioni
Tra le varie proprietà del tensore delle tensioni si può far vedere che
Tik = Tki
cioè che il tensore Tik è simmetrico con considerazioni sull'equilibrio alla rotazione di un
elemento di fluido.
Infatti, consideriamo il caso semplice dell'equilibrio alla rotazione di un elemento di fluido di
base rettangolare e profondità δx3:
x2
T2'
δx3
T’22
S
T ‘21
T1''
δx2
G
T ”12
T2''
x
x1
T11
δx1
T ”22
P
Trasformazione delle componenti del tensore al variare della terna di riferimento: Sia
ortogonale e
T12
T ”21
R
T2''
6
T1'
O
T ”11
T1''
Q
x*i
una terna di riferimento cartesiana
*
i un'altra terna dello stesso tipo, e si voglia rappresentare il tensore delle tensioni in
x*i . Sia Π la matrice di trasformazione
da:
*
xi → xi*
e ei → ei
per cui
*
e i = Π il e l
con
Π il =
∂xi*
∂xl
che per la sola rotazione si riduce ai coseni direttori cil di cui solo 3 indipendenti.
Ricordando le 2.28 si ottiene:
T = cni T i
*
T ⋅ e i = cnk T k Π il e l
Ti* = cnk Π il T k ⋅ e l = cnk Π il Tkl
88
Il contributo delle tensioni agenti sui 4 lati PQ, RS, RP, SQ , sarà:
δx1
δx 3
2
δx
T12'' δx2 1 δx3
2
δx
- T21'' 2 δx 3δx1
2
δx
2
− T21'
δx1 δx 3
2
T12' δx 2
contributo di PQ
contributo di RS
contributo di RP
contributo di SQ
Ed il momento rispetto al baricentro, essendo δv il volume =δx1δx2δx3:
M TO =
{(
) (
δv '
T12 + T12'' − T21' + T21''
2
)}
La variazione del momento della quantità di moto è data invece da:
M Ι = Ι 3 ζ& = mr32 ζ& = m
δx 2 + δx22 &
δx12 + δx22 &
ζ
ζ = ρδv 1
12
12
essendo il raggio di inerzia r3:
r32 =
δx12 + δx 22
12
Quindi per la conservazione del momento della quantità di moto, cioè per l'equilibrio alla
rotazione rispetto al baricentro, si ha che:
MTO = MΙ
e quindi
δv '
δx 2 + δx22 &
{
(
T12 + T12'' ) − (T21' + T21'' )} = ρδv 1
ζ
2
12
che al limite, per l'elementino che tende a zero, dà:
lim
δx1 ,δx2 →0
(δx
2
1
)
+ δx 22
= 0 ⇒ T12 = T21
6
89
2.10 Relazione costitutiva per fluidi Newtoniani
Come vedremo successivamente più in dettaglio, nello scrivere le equazioni di equilibrio che
governano il moto di un fluido avremo l'equilibrio tra forze d'inerzia, forze di superficie e
forze di volume.
Le forze di inerzia saranno espresse in termini di accelerazioni ovvero di variazioni delle
velocità mentre le forze di superficie, come visto al paragrafo (2.9), sono espresse in funzione
delle tensioni superficiali che una particella applica ad una contigua. E’ pertanto opportuno
esprimere una forma di legame di tipo lineare tra le tensioni e le velocità di deformazione in
modo che le equazioni risultanti siano in termini delle sole velocità.
2.10.1 Relazioni costitutive tensioni - velocità di deformazione
Tali relazioni sono di tipo assiomatico e si basano sugli assiomi detti di Noll, che sono i
seguenti:.
1. Principio di determinismo o non influenza dal futuro
2. Principio di effetto locale
3. Principio di indifferenza dal sistema di riferimento
Inoltre si assume ragionevolmente che Tij dipenda esclusivamente da:
(1) Velocità
(2) Tensore del gradiente di velocità
∂u i
∂x j
(3) Stato termodinamico
cioè:
⎛
⎞
∂u
Tij = H ⎜ u i , i , stato termodinamico ⎟
⎜
⎟
∂x j
⎝
⎠
Supponiamo che sia valida la (2.19):
∂u i
= {Ωik + ε ik }
∂x k
Dall'assioma 3, Tij non può dipendere da Ωij in quanto Ωij è emisimmetrico e Tij è simmetrico
e non può dipendere da ui in quanto è un vettore, quindi:
Tij = H (εij, , stato termodinamico)
(2.32)
Per un fluido a riposo, dall'analisi sperimentale e dalla fluidostatica, si ha:
90
T = − pn
Tijnj = -pδijnj
(Tij+pδij)nj = 0
quindi in fluidostatica il tensore è sferico e la sua traccia è uguale a –3p
T11 = T22 = T33 = -p
Si considerano ora le ipotesi di fluido Stokesiano
1. Tij è una funzione continua di εij e dello stato termodinamico
2. a riposo Tij + pδij = 0
3. il fluido è isotropo
4. il fluido è omogeneo
La relazione costitutiva si ottiene quindi sviluppando in serie di Taylor la (2.32)
2
3
Tij = Aij1 + Aijkl
εkl + Aijklmn
εkl εmn
(2.33)
A1, A2, ....devono essere isotropi, ed inoltre Aij1 è un tensore del secondo ordine, Aijkl è un
tensore del quarto ordine, ecc..
Il fluido si dice Newtoniano, se si trascurano nello sviluppo in serie i termini del secondo
ordine εklεmn. L'unico tensore isotropo del II° ordine è:
Aij = Aoδij
(2.34)
L'unico tensore isotropo del IV°ordine può essere espresso come:
Aijkl = A1δijδkl + A2δilδkj + A3δikδjl
(2.35)
Quindi:
Tij = A0δij + A1δijδklεkl + A2δikδjlεkl + A3δilδjkεkl=
(2.36)
=(A0 + A1εkk)δij + (A2+A3)εij
(2.37)
A0 = -p
A1 = λ
A4 = A2 + A3 = 2μ
91
Da cui:
Tij =(-p+λεkk)δij+2μεij
(2.38)
La (2.38) costituisce la relazione costitutiva per un fluido Newtoniano.
Spesso si indica:
Tij = -pδij+σij
σij = λεkkδij+2μεij
dove
(2.39)
Si noti che la traccia risulta:
Tii = -3p+σii = -3p + (3λ+2μ)εii
(2.40)
e la media risulta:
Tii
2 ⎞
⎛
= − p + ⎜ λ + μ ⎟ε ii
3
3 ⎠
⎝
(2.41)
In condizioni di riposo,
Tii
= −p
3
cioè la pressione termodinamica uguaglia il valore medio della traccia (rispetta pertanto la
seconda ipotesi di Stokes).
In condizioni di moto, si devono distinguere 2 casi semplificati:
∂u i
= 0 campo solenoidale incompressibile.
∂xi
2
2
2. λ + μ = 0 ⇒ λ = − μ ipotesi di Stokes verificata per gas monoatomici a bassa
3
3
densità (ed anche per l’aria).
1. ε ii = 0 ⇒
In generale si ha:
Tii
2 ⎞
⎛
+ p = ⎜ λ + μ ⎟ε ii
3
3 ⎠
⎝
(2.42)
dove spesso si indica con λ’ = λ+2/3μ la viscosità volumetrica. Si noti che p è la pressione
del fluido a riposo quindi rappresenta la pressione fluidostatica. Nel caso di flusso in moto, la
pressione P sarà uguale ad un terzo di Tii, e talvolta viene quindi indicata come:
92
Tii
3
che, come detto, rappresenta convenzionalmente la pressione del fluido in moto. Questa è una
quantità meccanica che non coincide necessariamente con la pressione termodinamica.
P=−
Tornando al caso più generale, si ha pertanto:
Tij =
Tii
δij + d ij
3
(2.43)
dove Tii/3 è il tensore sferico e dij il tensore deviatorico.
1
⎞
⎛
σ ij = λε kk δij + 2με ij = λ' ε kk δij + 2μ⎜ ε ij − ε kk δij ⎟
3
⎝
⎠
Tij = (− p + λε kk )δij + 2με ij
Tij = − pδij + σ ij
e
(2.44)
Per gas monoatomici a bassa densità (λ’ = 0) si ha:
1
⎛
⎞
Tij = − pδij + 2μ⎜ ε ij − ε kk δij ⎟
3
⎝
⎠
(2.45)
2.10.2 Relazioni costitutive per il flusso di calore
Sulla base degli assiomi di Noll si può introdurre anche il legame costitutivo tra flusso di
calore e temperatura o gradiente di temperatura
K i = Ai1 + Aij2
∂T
∂x j
(2.46)
dove Ai1 è un vettore e Aij2 è un tensore del secondo ordine. Ma A1 e A2 devono essere
isotropi
Aij1 = k' δij
e
Ai1 = 0
e quindi:
∂T
∂T
(2.47)
δij = − k'
∂x j
∂xi
con k coefficiente di conducibilità termica del fluido, e il segno meno tiene conto del calore
che si propaga da zone calde a zone fredde.
K i = k'
93
2.11 Esercizi relativi al Cap. 2
Es. 2.1. Applicazione dei concetti di cinematica al moto di Couette
Consideriamo un moto di Couette, ovvero il moto piano di un fluido fra due piani paralleli di
cui uno è fisso e l'altro si muove con velocità costante V. Consideriamo il fluido
incompressibile e viscoso (moto laminare) e trascuriamo l'effetto della forza peso. Come
vedremo in seguito, questo tipo di moto dà una rappresentazione semplificata delle
fenomenologie che si osservano nei problemi di lubrificazione ad esempio in cuscinetti
concentrici rotanti (supponendo che il meato tra albero e cuscinetto sia molto più piccolo del
raggio dell'albero). Come si vedrà più in dettaglio in seguito, se supponiamo la pressione
sempre costante, la velocità nel meato è una funzione lineare della distanza dal piano fisso:
V
t+dt
t
d
y
’
P(x,y)
P
x
Con le notazioni della figura (distanza tra i piani d e velocità del piano mobile V) la velocità di
un punto P(x1,x2) è data da:
V
x2
d
v2 = 0
v1 =
Supponendo il fluido Newtoniano, lo sforzo di taglio τ che uno strato di fluido trasmette allo
strato adiacente meno veloce, è dato da:
τ=μ
∂v 1
= μh
∂x 2
avendo posto h=V/d. μ rappresenta il coefficiente di viscosità che supponiamo essere costante
(la temperatura del fluido è mantenuta costante tramite e.g. uno scambiatore di calore). Lo
sforzo μ è quindi costante in tutto il campo.
Per questo tipo di flusso, determinare lo spostamento e la deformazione in un tempo dt di un
quadrato di fluido con lati paralleli agli assi.
94
Es. 2.2
Un campo di velocità in due dimensioni è dato da:
u=
z
z
z
z
z
10 y
(x
2
+y
)
1
2 2
i−
10 x
(x
2
+y
)
1
2 2
j
⎛m⎞
⎜ ⎟
⎝s⎠
Dire se il campo è solenoidale
Dire se il campo è rotazionale o irrotazionale
Determinare il modulo della velocità e la velocità dei punti lungo l'asse x e l'asse y
Determinare l'angolo tra il vettore velocità e l'asse x nei punti (x,y) = (5;0), (5;5) e (0;5)
Determinare l'equazione delle linee di corrente.
Es. 2.3
Un campo di velocità è dato da
u=
v0
(x i − y j )
l
Con V0 ed l costanti. In quale posizione del campo il modulo della velocità è V0? Diagrammare
la velocità nel I° e II° quadrante usando delle frecce per rappresentare la velocità del fluido in
alcune posizioni, e individuare di che tipo di flusso si tratta. Inoltre:
z
z
z
z
z
Verificare che il campo è irrotazionale
Verificare che il campo è solenoidale.
Determinare la funzione di corrente e disegnare le linee di corrente
Determinare il potenziale scalare e disegnare le linee equipotenziali
Dimostrare che linee equipotenziali e linee di corrente sono perpendicolari tra loro.
Es. 2.4
Il gas di uscita da un motore a reazione di un aereo si trova a temperatura T funzione della
quota z e del tempo t. Fissata la quota, la temperatura diminuisce con legge
∂T
= −c1
∂t
con
c1 p 0
Al crescere della quota la temperatura aumenta con legge
∂T
= c2
∂z
con c 2 f 0
95
Determinare la velocità verticale dell'aereo affinchè la temperatura si mantenga costante.
Es. 2.5
Il campo di velocità di un flusso è dato da:
u=−
v=
V0 y
(x
+ y2
V0 x
(x
2
)
1
2
+ y 2 )2
1
2
con V0 costante. Dove, nel campo, la velocità è pari a V0? Determinare anche l'equazione delle
linee di corrente.
Es. 2.6
Dato il campo di velocità
u = c (x2-y2)
v = -2cxy
determinare l'equazione delle linee di corrente.
Mostrare in quali punti del campo il flusso è parallelo all'asse x.
Es. 2.7
Le componenti x ed y della velocità per un flusso 2D sono:
⎛m⎞
u = 6y ⎜ ⎟
⎝s⎠
⎛m⎞
v =3 ⎜ ⎟
⎝s⎠
Determinare le equazioni delle linee di corrente ed il luogo di punti nei quali la velocità è
parallela alla bisettrice del I° quadrante.
Es. 2.8
Dato il campo di velocità:
u=
cx
x + y2
2
v=
cy
x + y2
2
96
con c=cost. (sorgente).
Calcolare:
z
z
La variazione percentuale di volume di un elemento di fluido nell'unità di tempo.
La vorticità
Es. 2.9
Dato il campo di velocità:
u=
cy
x + y2
2
v =−
cx
x + y2
2
con c=cost.
Calcolare:
z
z
La variazione percentuale di volume di un elemento di fluido nell'unità di tempo.
La vorticità
Es. 2.10
Il moto descritto dalle relazioni:
uθ =cr
ur = 0
(con c=cost.) è rotazionale o irrotazionale?
Es. 2.11
Consideriamo il campo di velocità:
u=
y
x + y2
2
v =−
x
x + y2
2
w =0
indicare di che tipo di flusso si tratta (compressibile o incompressibile) e se il moto è
irrotazionale.
Es. 2.12
Definire il seguente campo di velocità:
97
v = (3z - 4x ; -5y ; -2x+z)
Es. 2.13
In un moto alla Poiseuille in un tubo, le componenti di velocità sono:
w = b(- x2 - y2 + a2)
u=v=0
che tipo di moto e flusso è?
Es. 2.14
Un flusso bidimensionale ha il campo di velocità definito come:
(
)
u = 4xyi + 2 x 2 − y 2 j
E' irrotazionale?
Es. 2.15
Per un flusso 3D, incompressibile, stazionario, si hanno:
u = x 2 + y2 + z2
v = xy + yz + z 2
Determinare la forma della componente w, affinchè il flusso soddisfi l'equazione di continuità.
Es. 2.16
Il modulo della velocità di un campo fluidodinamico è dato da v = x 2 + 2xy + 2 y 2 mentre
le funzioni di corrente è data da: y 2 + 2 xy = cos t . Valutare le componenti della velocità u e
v.
Es. 2.17
Un campo di velocità in un flusso stazionario, compressibile e bidimensionale, è dato da:
u = 2y
z
z
v = 4x
Determinare la funzione di corrente corrispondente
Disegnare le linee di corrente e la direzione del flusso
98
Es. 2.18
Scrivere in forma indiciale (secondo la notazione di Newton) il risultato delle operazioni
indicate:
1. ∇ ⋅ u =
11. (u ⋅ ∇ )u =
2. u ⋅ ∇ T =
12. ∇ ⋅ (ρu ) =
3. ∇P =
13. ∇ ⊗ u =
4. ∇ ⋅ ∇ T =
14. δ ii =
5. ∇ T ⋅ n =
15. δ ik δ ik =
6. P I =
16. ε ik ε ik =
7.
8.
(∇ ⋅ T )⋅ u =
17. ε ik δ kl =
DT
=
Dt
18. ε ik δ kl =
9. u ⊗ u =
19. ε ik ε lm δ ik δ lm =
10. ∇ ⋅ (u ⊗ u ) =
20. ε ik Ω ik =
98 bis
2.12 Soluzione degli esercizi relativi al Cap. 2
Es. 2.1. Applicazione dei concetti di cinematica al moto di Couette
Consideriamo un moto di Couette, ovvero il moto piano di un fluido fra due piani paralleli
di cui uno è fisso e l'altro si muove con velocità costante V. Consideriamo il fluido
incompressibile e viscoso (moto laminare) e trascuriamo l'effetto della forza peso. Come
vedremo in seguito, questo tipo di moto dà una rappresentazione semplificata delle
fenomenologie che si osservano nei problemi di lubrificazione ad esempio in cuscinetti
concentrici rotanti (supponendo che il meato tra albero e cuscinetto sia molto più piccolo
del raggio dell'albero). Come si vedrà più in dettaglio in seguito, se supponiamo la
pressione sempre costante, la velocità nel meato è una funzione lineare della distanza dal
piano fisso:
V
t+dt
t
d
P(x,y)
y
P’
x
Con le notazioni della figura (distanza tra i piani d e velocità del piano mobile V) la
velocità di un punto P(x1,x2) è data da:
V
x2
d
v2 = 0
v1 =
Supponendo il fluido Newtoniano, lo sforzo di taglio τ che uno strato di fluido trasmette
allo strato adiacente meno veloce, è dato da:
τ=μ
∂v 1
= μh
∂x 2
avendo posto h=V/d. μ rappresenta il coefficiente di viscosità che supponiamo essere
costante (la temperatura del fluido è mantenuta costante tramite e.g. uno scambiatore di
calore). Lo sforzo μ è quindi costante in tutto il campo.
Per questo tipo di flusso, determinare lo spostamento e la deformazione in un tempo dt di
un quadrato di fluido con lati paralleli agli assi.
99
Soluzione Es. 2. 1
Il tensore velocità di deformazione sarà dato da:
∂v i ⎛ 0 h ⎞
⎟
=⎜
∂x i ⎜⎝ 0 0 ⎟⎠
Come abbiamo visto, tale tensore può essere scomposto nella parte simmetrica udi e nella
parte antisimmetrica uRi, e nel caso in esame si ottiene:
⎛
∂v i ⎛ 0 h ⎞ ⎜ 0
⎟=⎜
=⎜
∂x k ⎜⎝ 0 0 ⎟⎠ ⎜ − 1 h
⎜
⎝ 2
1 ⎞ ⎛
h⎟ ⎜ 0
2 ⎟+⎜
1
0 ⎟⎟ ⎜⎜ h
⎠ ⎝2
1 ⎞
h⎟
2 ⎟
0 ⎟⎟
⎠
La prima matrice a secondo membro (rotazione rigida) fornisce due componenti di velocità
1
hξ 2 ,
2
1
− hξ 1
2
1
che corrispondono alla rotazione di un punto Q rispetto a P con velocità angolare − h .
2
Infatti, se calcoliamo il rotore della velocità, si ottiene (tenendo conto che il moto è piano):
∇×u =
∂v 2 ∂v 1
−
= −h
∂x 1 ∂x 2
e cioè la parte antisimmetrica del tensore velocità di deformazione, rappresenta una
rotazione rigida con velocità angolare:
ζ=
1
1
∇×u = − h
2
2
La parte simmetrica del tensore velocità di deformazione, rappresenta invece una
deformazione per solo scorrimento (solo i termini fuori della diagonale sono diversi da 0)
con dilatazione nulla.
La parte simmetrica del tensore velocità di deformazione fornisce quindi due componenti
di velocità
1
hξ 2 ,
2
1
hξ 1
2
che corrispondono alla deformazione per scorrimento.
Consideriamo allora il quadrato di fluido PACB con lati paralleli agli assi e prendiamo un
riferimento cartesiano locale ξ1, ξ2 centrato nel punto P.
100
t
t+dt
ξ2
ξ2
P’
ξ1
P ξ1
Vediamo separatamente gli effetti della traslazione, rotazione e scorrimento in un tempo
dt:
la traslazione rigida sposta rigidamente tutto il quadrato da P a P’. Se il punto P si
trovava nella posizione (x1; x2), dopo la traslazione si troverà nel punto:
P
P ′ = (x 1 + v 1dt ; x 2 ) ⇒ PP ′ = v 1dt =
V
x 2 dt
h
nella rotazione rigida, PA e PB ruotano rigidamente di 1/2hdt in senso orario essendo la
velocità angolare = -1/2h.
nella deformazione per scorrimento, il punto A ruota di 1/2hdt in senso antiorario,
mentre il punto B ruota sempre di 1/2hdt ma in senso orario.
Globalmente, sommando i tre effetti, si ha che nel punto A, l'effetto della rotazione e dello
scorrimento si compensano quindi esso subisce solo la traslazione rigida. Nel punto B i due
effetti invece si sommano, quindi, oltre alla traslazione rigida, esso si sposta di hdt . Il
risultato finale per il quadrato completo quindi:
E’ da notare che gli spostamenti infinitesimi sono commutativi cioè la posizione finale di
un punto non dipende dall'ordine in cui essi vengono applicati. Questo ci ha permesso di
considerare separatamente la traslazione, rotazione e scorrimento, e di ottenere la
deformazione finale sovrapponendone gli effetti.
101
Es. 2.2
Un campo di velocità in due dimensioni è dato da:
u=
10 y
(x
2
+y
)
1
2 2
r
i−
10 x
(x
2
+y
)
1
2 2
j
⎛m⎞
⎜ ⎟
⎝s⎠
Dire se il campo è solenoidale
Dire se il campo è rotazionale o irrotazionale
Determinare il modulo della velocità e la velocità dei punti lungo l'asse x e l'asse y
Determinare l'angolo tra il vettore velocità e l'asse x nei punti (x,y) = (5;0), (5;5) e (0;5)
Determinare l'equazione delle linee di corrente.
Soluzione Es. 2.2
Affinché il campo di velocità sia solenoidale, deve valere:
r r ∂u ∂v
∇ ⋅u =
+
=0
∂x ∂x
Chiameremo
A( x, y ) = x 2 + y 2
quindi l’espressione del campo diventa:
1
1
r
r
−
−
r
u = A 2 ⋅ 10 y ⋅ i − A 2 ⋅ 10 x ⋅ j
Poiché
−
1
−
∂A 2
= −A 2 x
∂x
−
3
e
1
−
∂A 2
= −A 2 y
∂x
3
si ha:
3
−
⎛ 1 −3 ⎞
∂u
= 10 y⎜⎜ − A 2 2 x ⎟⎟ = −10 xyA 2
∂x
⎝ 2
⎠
e
3
−
⎛ 1 −3 ⎞
∂v
= −10 x⎜⎜ − A 2 2 x ⎟⎟ = 10 xyA 2
∂x
⎝ 2
⎠
Quindi, sommando le due derivate, si vede che il campo di velocità è solenoidale.
102
Determiniamo ora se il campo è rotazionale o irrotazionale.
r
ω=−
−
−
−
−
−
−
∂u ∂v
+
= 10 y 2 A 2 − 10 A 2 + 10 A 2 x 2 − 10 A 2 = −20 A 2 + 10 A 2 x 2 + y 2 =
∂y ∂x
= −20 A
3
−
1
2
+ 10 A
−
1
2
= −10 A
1
−
3
1
1
3
(
)
1
2
Quindi il campo è rotazionale.
Calcoliamo adesso il modulo della velocità e la velocità dei punti lungo gli assi x e y.
Il modulo è:
r
u = u 2 + y 2 = A−1 100 y 2 + 100 x 2 = 10 A−1 A = 10 m / s
Lungo l’asse x, cioè per y = 0, si ha:
u=−
r
10 x
= −10 j m / s
x
Analogamente lungo l’asse y, cioè per x = 0, si può scrivere:
v=
r
10 y
= 10i m / s
y
y
10 m/s
x
-10 m/s
103
Determiniamo ora l’angolo ϑ che c’è tra il vettore velocità e l’asse x nei punti
(x,y) = (5;0), (5;5) e (0;5).
y
r
u
v
ϑ
x
u
r
u = u cos ϑ
r
v = u sin ϑ
v = u ⋅ tgϑ => tgϑ =
v
v
=> ϑ = arctg
u
u
Per il punto di coordinate (5;0) si ha:
v
3
1
= −∞ ⇒ ϑ = π = − π
u
2
2
Per il punto di coordinate (5;5) si ha:
r
50 r 50 r
u=
i−
j
5 2
5 2
10
⎧
⎪⎪u = 2
⎨
⎪v = − 10
⎪⎩
2
v
= −1 => ϑ = arctg (− 1)
u
=> ϑ = −
π
4
104
Determiniamo ora l’equazione delle linee di corrente.
r
u
v
u
Le linee di corrente sono tangenti alle velocità quindi:
−
1
2
v dy
x
10 xA
=
=−
=−
1
−
u dx
y
10 yA 2
Allora:
dy
x
=−
⇒ y ⋅ dy = − x ⋅ dx
dx
y
Integrando:
y2
x2
=−
+ c2
2
2
Pertanto l’equazione delle funzioni di corrente è una circonferenza di equazione:
x2 + y2 = 2 ⋅ c2
105
Es. 2.3
Un campo di velocità è dato da
r V r r
u = 0 (xi − yj )
l
Con V0 ed l costanti. In quale posizione del campo il modulo della velocità è V0?
Diagrammare la velocità nel I e II quadrante usando delle frecce per rappresentare la
velocità del fluido in alcune posizioni, e individuare di che tipo di flusso si tratta. Inoltre:
Verificare che il campo è irrotazionale
Verificare che il campo è solenoidale.
Determinare la funzione di corrente e disegnare le linee di corrente
Determinare il potenziale scalare e disegnare le linee equipotenziali
Dimostrare che linee equipotenziali e linee di corrente sono perpendicolari tra loro.
Soluzione Es. 2.3
Il modulo della velocità è:
r V
u = 0
l
x2 + y2
Esso è pari a V0 quando
x2 + y2 = l
Quindi il modulo della velocità è V0 su una circonferenza di raggio l (vedi figura):
x2 + y2 = l
Inoltre è facilmente verificabile che il campo è irrotazionale e solenoidale, infatti:
r
ω = 0 ⇒ campo irrotazionale
r r
∇ ⋅u = 0
⇒ campo solenoidale
Troviamo ora le linee di corrente:
dy v
y
= =−
dx u
x
dy
dx
=−
y
x
106
log y = − log x + c
log y + log x = c
log xy = c
xy = e c = c1
xy = c1
⇒ iperbole
y
Linee di
corrente
x
L
Posso introdurre il potenziale scalare ϕ , infatti:
r
ω=0
r r
⇒ u = ∇ϕ
Esso sarà:
x
y
x
y
ϕ − ϕ 0 = ∫ udx + ∫ vdy = ∫ xdx − ∫ ydy =
0
ϕ = ϕ0 +
0
(
1 2
x − y2
2
0
0
)
107
x2 y2 1 2
−
= (x − y 2 )
2
2
2
Per dimostrare che le linee equipotenziali e le linee di corrente sono ortogonali tra loro, si
può imporre:
r
r
∇ϕ ⋅ ∇ψ = 0
cioè
r r
u ⋅ ∇ψ = 0
con
r
∂
∂
∇ψ =
xy +
xy = y − x
∂x
∂y
Quindi:
r
r
r
r
(xi − yj )⋅ (yi − xj ) = xy − xy = 0
Pertanto sono ortogonali.
Es. 2.4
Il gas di uscita da un motore a reazione di un aereo si trova a temperatura T funzione della
quota z e del tempo t. Fissata la quota, la temperatura aumenta con legge:
∂T
= −c1
∂t
con
c1 < 0
Al crescere della quota la temperatura diminuisce con legge:
∂T
= −c 2
∂z
con
c2 > 0
Determinare la velocità verticale dell'aereo affinchè la temperatura si mantenga costante.
Soluzione Es. 2.4
Determino sulla verticale
T [z (t ) , t ]
DT
=0
Dt
108
∂T r
+ u ⋅ ∇T = 0
∂t
∂T
∂T
+u
=0
∂t
∂z
− c1 + u (− c 2 ) = 0
u=−
c1
c2
poiché c1 < 0
u>0
Quindi dovrò salire con velocità pari a:
c
r
u = 1
c2
Soluzione Esercizi sulle notazioni indiciali
∂uk
∂xk
(
)
11. u ⋅ ∇ u = uk
∂ui
eˆi
∂xk
1.
∇ ⋅u =
2.
u ⋅ ∇ T = uk
3.
∇P =
4.
∇ ⋅ ∇T =
∂ 2T
∂xk2
14.
δ ii = 3
5.
∇T ⋅ n =
∂T
nk
∂xk
15.
δ ikδ ik = δ ii = 3
6.
P I = Pδ ik
16.
ε ik ε ik = ε ik2 = ε112 + ε 222 + ε 332 + 2ε122 + 2ε132 + 2ε 232
7.
(∇ ⋅ T )⋅ u = ∂∂Tx
uk
17.
ε ikδ ik = ε ii
8.
DT ∂T
∂T
+ uk
=
Dt
∂xk
∂t
18.
ε ikδ kl = ε il
9.
u ⊗ u = uiuk eˆi eˆk
19.
ε ik ε lmδ ikδ lm = ε ii2 = ε112 + ε 222 + ε 332
∂T
∂xk
12. ∇ ⋅ (ρu ) =
∂P
eˆk
∂xk
13. ∇ ⊗ u =
ik
∂ρuk
∂xk
∂uk
eˆi eˆk
∂xi
i
10. ∇ ⋅ (u ⊗ u ) =
∂uiuk
eˆi
∂xk
⎛1⎞
20. ε ik Ωik = ⎜ ⎟
⎝2⎠
109
2
⎛ ∂ui ∂uk ⎞⎛ ∂ui ∂uk ⎞
⎜⎜
⎟⎟⎜⎜
⎟⎟
−
+
∂
∂
∂
∂
x
x
x
x
i ⎠⎝
k
i ⎠
⎝ k