Comportamento meccanico dei materiali
Equilibrio esterno
Cinematica ed equilibrio del corpo rigido
Equilibrio esterno
Spostamenti virtuali
Lavori virtuali ed equilibrio
Determinazione statica
Numero dei vincoli e determinazione
Approfondimenti: lavoro virtuale
Approfondimenti: forze e momenti
2
© 2006 Politecnico di Torino
1
Comportamento meccanico dei materiali
Equilibrio esterno
Equilibrio esterno
Spostamenti virtuali (1/9)
In un corpo rigido i punti
sono tra loro vincolati a
distanze invariabili.
C
P
X
© 2006 Politecnico di Torino
4
2
Comportamento meccanico dei materiali
Equilibrio esterno
Spostamenti virtuali (2/9)
Ciò implica una relazione
tra le velocità
dP CP ⋅ dϑ
=
dt
dt
C
qui disegnate per
rappresentare gli
spostamenti infinitesimi
che hanno luogo nel
tempo dt, altrimenti non
visibili sul disegno.
P
X
5
Spostamenti virtuali (3/9)
È possibile mettere in
relazione diretta gli
spostamenti infinitesimi di
un punto qualsiasi X dato
il moto di un punto P e la
rotazione del corpo dϑ :
C
P
dX = dP + i d ϑ PX
X
© 2006 Politecnico di Torino
6
3
Comportamento meccanico dei materiali
Equilibrio esterno
Spostamenti virtuali (4/9)
Si distingue ora tra gli
spostamenti effettivi
infinitesimi che il corpo
subisce, a un dato
istante, a causa di un
movimento reale …
C
P
X
7
Spostamenti virtuali (5/9)
… e, invece, gli spostamenti infinitesimi che il
corpo potrebbe subire (variazione di posizione che
si realizza senza che occorre stabilirne la durata di
tempo) rispettando solamente i vincoli interni di
movimento relativo tra i suoi punti, più eventuali
condizioni di vincolo esterno.
Questi ultimi sono spostamenti possibili rispettando
solo le condizioni di vincolo cinematico, e, per
distinguerli da quelli reali, vengono indicati con un
simbolo diverso, “ δ “:
δX = δP + i δ ϑ PX
8
© 2006 Politecnico di Torino
4
Comportamento meccanico dei materiali
Equilibrio esterno
Spostamenti virtuali (6/9)
Esempio 1 di moto
virtuale
Esempio 2 di moto
virtuale
δP
δP
P
P
δX
δX
X
X
9
Spostamenti virtuali (7/9)
Esempio 3 di moto
virtuale
δP=0
P
Il moto virtuale più
generale può essere la
composizione dei tre
moti qui rappresentati,
ciascuno scelto con
valori arbitrari, e
vettorialmente si
scrive:
δX = δP + i · δϑ · PX
δX
X
© 2006 Politecnico di Torino
10
5
Comportamento meccanico dei materiali
Equilibrio esterno
Spostamenti virtuali (8/9)
Precisiamo ancora: il moto reale del corpo rigido
può essere nullo (quiete) oppure un moto uniforme,
o infine un moto accelerato. A ogni istante produce,
in un tempo infinitesimo, una variazione di
posizione infinitesima “reale”.
Uno spostamento virtuale è invece una variazione
infinitesima di posizione del corpo tra quelle
cinematicamente possibili, senza che si debba
effettivamente verificare.
11
Spostamenti virtuali (9/9)
Gli spostamenti virtuali sono “variazioni di posizione”
infinitesime tra un “prima” e un “dopo” in un tempo
irrilevante, e non producono forze d’inerzia.
12
© 2006 Politecnico di Torino
6
Comportamento meccanico dei materiali
Equilibrio esterno
Equilibrio esterno
Lavoro virtuale (1/3)
Prendiamo un sistema rigido, e consideriamo la
presenza di forze (reali) e di spostamento (virtuale).
Descriviamo il moto dei punti
A,B,C…., rispetto al punto P:
A
δA
B
δB
P δP
δA = δP + δϑ i PA
δB = δP + δϑ i PB
δC = δP + δϑ i PC
C
δC
.........
δX = δP + δϑ i PX
14
© 2006 Politecnico di Torino
7
Comportamento meccanico dei materiali
Equilibrio esterno
Lavoro virtuale (2/3)
Nei punti sono inoltre applicate forze:
FA
FA ,FB ,FC .......,FP
A
δA
P δP
B
FB
δB
C
FP
FC
δC
15
Lavoro virtuale (3/3)
Il sistema è in equilibrio se il lavoro compiuto dalle
forze per uno spostamento virtuale (infinitesimo
compatibile con la cinematica del corpo rigido), è
nullo. Tale lavoro è la somma:
FP ⋅ δP + FA ⋅ δA + FB ⋅ δB + FC ⋅ δC + ........... = 0
δC = δP + δϑ i PC
δB = δP + δϑ i PB
δA = δP + δϑ i PA
(F
P
+ FA + FB + FC + ...) ⋅ δP +
δϑ ⋅ (FA ⋅ i PA + FB ⋅ i PB + K FC ⋅ i PC K) = 0
© 2006 Politecnico di Torino
16
8
Comportamento meccanico dei materiali
Equilibrio esterno
Equazioni di equilibrio (1/2)
Siccome δP e δϑ possono essere dati
indipendentemente, si ottengono due equazioni:
Vettoriale, equivalente a due scalari,
FP + FA + FB + FC ........... = 0
lavoro dovuto alla traslazione con P; dice che la
somma delle forze deve essere nulla.
Scalare
FA ⋅ i PA + FB ⋅ i PB + K FC ⋅ i PC... = 0
lavoro dovuto alla rotazione attorno a P … …
17
Equazioni di equilibrio (2/2)
… questa dice che la somma dei momenti rispetto al
“polo” P deve essere nulla.
FA ⋅ i PA = FA PA cos ϕ è il momento di FA rispetto a P
(definizione usuale: forza x braccio) perché:
FA
FA
A
P
FA ⋅ i PA
{
© 2006 Politecnico di Torino
⇒
A
ϕ
HP
ϕ
P
PA cos ϕ
{
18
9
Comportamento meccanico dei materiali
Equilibrio esterno
Equivalenza del polo dei momenti (1/4)
Se il polo è un altro, Q ≠ P , ovviamente il
momento deve essere nullo rispetto a Q
δX = δQ + δϑ i QX
⇒ rotazione unica per tutto il corpo!
Il lavoro virtuale compiuto in una rotazione attorno
a Q più uno spostamento dQ di Q:
(abbiamo scelto un Q in cui non è applicata una
forza)
(F
P
+ FA + FB + FC + ......) ⋅ δQ +
+δϑ ⋅ (FP ⋅ i QP + FA ⋅ i QA + FB ⋅ i QB + FC ⋅ i QC + ....) = 0
19
A
Equivalenza del polo dei momenti (2/4)
(F
P
+ FA + FB + FC + ......) ⋅ δQ +
+δϑ ⋅ (FP ⋅ i QP + FA ⋅ i QA + FB ⋅ i QB + FC ⋅ i QC + ....) = 0
.....
= ( QP + PB ) .....
= ( QP + PA ) .....
ma: QX = QP + PX
X
Fx
P
Q
© 2006 Politecnico di Torino
}
20
10
Comportamento meccanico dei materiali
Equilibrio esterno
A
Equivalenza del polo dei momenti (3/4)
Sostituendo e raccogliendo:
(F
+ FA + FB + FC + ......) ⋅ δQ +
P
lavoro della forza risultante applicata in Q,
prodotto dalla traslazione di Q
!
=0
+δϑ ⋅ (FP + FA + FB + FC + ......) ⋅ i QP +
lavoro della forza risultante applicata in Q,
prodotto dalla rotazione attorno a P
+δϑ ⋅ (FA ⋅ i PA + FB ⋅ i PB + FC ⋅ i PC.......) = 0
lavoro delle forze applicate nei punti A, B, C, …
prodotto dalla loro rotazione attorno a P
21
A
Equivalenza del polo dei momenti (4/4)
Le stesse equazioni già soddisfatte per la riduzione
rispetto al “polo” P;
FP + FA + FB + FC ....... = 0
FA ⋅ i PA + FB ⋅ i PB + FC ⋅ i PC....... = 0
annullano il lavoro prodotto dalle stesse forze per lo
stesso moto ma descritto come roto-traslatorio
attorno al “polo” Q.
Consegue che si potrà liberamente scegliere il punto
si ritiene più comodo che come polo per il calcolo
dei momenti.
22
© 2006 Politecnico di Torino
11
Comportamento meccanico dei materiali
Equilibrio esterno
Equilibrio esterno
Vincoli e determinazione (1/3)
Una struttura bloccata, o cinematicamente
sovradeterminata possiede vincoli che impediscono
i movimenti.
A ogni grado di libertà (cinematico) bloccato
corrisponde una reazione vincolare: cioè, a ogni
spostamento bloccato corrisponde una forza, ad
ogni rotazione bloccata corrisponde un momento.
I vincoli, esercitando forze e momenti, equilibrano i
carichi esterni applicati e tengono ferma la
struttura.
Queste forze e momenti non sono noti, e occorre
determinarli.
24
© 2006 Politecnico di Torino
12
Comportamento meccanico dei materiali
Equilibrio esterno
Vincoli e determinazione (2/3)
Alcune strutture hanno reazioni vincolari
(componenti scalari) in numero pari alle equazioni
di equilibrio indipendenti che si possono scrivere. In
tale caso le equazioni di equilibrio consentono di
determinare le reazioni vincolari.
La struttura è staticamente determinata: date le
forze esterne, l’insieme delle reazioni vincolari è
unico.
25
Vincoli e determinazione (3/3)
Se invece le componenti scalari delle reazioni
vincolari sono più delle equazioni di equilibrio che si
possono scrivere, queste ultime non possono
determinare le reazioni vincolari.
La struttura è, in tal caso, staticamente
indeterminata: date le forze esterne l’insieme delle
reazioni vincolari non è unico.
26
© 2006 Politecnico di Torino
13
Comportamento meccanico dei materiali
Equilibrio esterno
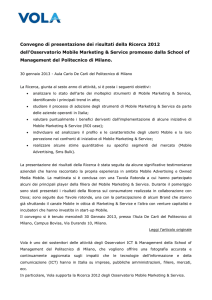
Struttura determinata (1/4)
Esempio 1:
struttura staticamente determinata (anche detta
isostatica): tre equazioni, tre incognite.
FC
A
B FB
C
a
b
FC
HA A
VA
B
C
VB
FB
27
Struttura determinata (2/4)
Equazioni:
1- Equilibrio orizzontale:
HA + FB = 0
2 - Equilibrio verticale:
VA + VB + FC = 0
3 - Momento attorno a C:
VA ⋅ a − VB ⋅ b = 0
(tra tutte le scelte possibili, la scelta di C è la più
conveniente perché rispetto ad esso sia FB sia FC
hanno momento nullo, e quindi non compaiono
28
nella equazione)
© 2006 Politecnico di Torino
14
Comportamento meccanico dei materiali
Equilibrio esterno
Struttura determinata (3/4)
Da queste equazioni si ottiene, con qualche
passaggio:
HA = − FB
VA = FC
b
a+b
meglio sempre verificare l’equilibrio:
VB = FC
a
a+b
come deve essere!
a ⎞
⎛ b
+
VA + VB = FC ⎜
⎟ ≡ FC
⎝a + b a + b⎠
29
Struttura determinata (4/4)
Le equazioni erano tre, ma possono essere
sostituite con altre tre più “intelligenti”.
Per l’equilibrio orizzontale c’è poco da fare; ma per
VA e VB si possono scrivere:
Momento attorno a B:
VA (a + b ) − FC ⋅ b = 0 → VA = FC
b
a+b
Momento attorno ad A:
FC ⋅ a − VB (a + b ) = 0 → VB = FC
a
a+b
30
© 2006 Politecnico di Torino
15
Comportamento meccanico dei materiali
Equilibrio esterno
Struttura indeterminata
Esempio 2:
struttura staticamente indeterminata (anche detta
iperstatica): tre equazioni, quattro incognite.
FC
A
B FB
C
a
HA A M A
VA
b
FC
B
C
VB
FB
31
Equilibrio esterno
© 2006 Politecnico di Torino
16
Comportamento meccanico dei materiali
Equilibrio esterno
Conteggio delle reazioni vincolari nel piano
Sembrerebbe che, dato che le equazioni di
equilibrio nel piano sono tre (orizzontale, verticale,
momento), ovvero il numero di reazioni vincolari
debba essere pari a tre.
Da quanto visto fino ad ora sembra che quando i
gradi di libertà bloccati siano in numero maggiore
di 3 la struttura sia sempre indeterminata, che sia
determinata invece se il loro numero è tre.
Invece, non è detto! Vediamolo con tre controesempi.
33
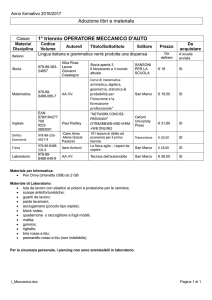
Indeterminazione apparente (1/8)
Contro-esempio 1
d
FC
A
HA
a
© 2006 Politecnico di Torino
FE
D
C
B
E
b
FC
A
MA VA
d
C
FE
D
B
VD
E
34
17
Comportamento meccanico dei materiali
Equilibrio esterno
Indeterminazione apparente (2/8)
Ci sono 4 reazioni vincolari; ma la struttura non è
indeterminata: il “trucco” sta nella cerniera interna B,
che divide la struttura in due parti determinate.
L’equilibrio orizzontale fornisce HA=0.
Per l’equilibrio alla rotazione del solo tratto (B,D,E):
d
F B ⋅ d − F E⋅ d = 0
cioè:
FB
FB= FE
d
FE
D
B
VD
E
35
Indeterminazione apparente (3/8)
FB =FE
… e inoltre per l’equilibrio
verticale:
− FB − F E + VD = 0 → VD = F B + F E = 2F E
FE
D
VD
⎧M − F ⋅ a + F ⋅ (a + b )
E
per l’equilibrio del tratto (A, C, B):⎨ A C
−
+
=
V
F
F
⎩ A
C
E 0
b
a
FC
FB= FE
A
HA
MA VA
© 2006 Politecnico di Torino
C
B
36
18
Comportamento meccanico dei materiali
Equilibrio esterno
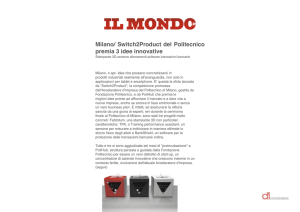
Indeterminazione apparente (4/8)
Contro-esempio 2 (analogo al precedente)
FC
A
B
b
a
45°
D
c
Apparentemente si hanno 4 componenti di reazioni
vincolari
37
Indeterminazione apparente (5/8)
Ma, per l’equilibrio alla rotazione, il tratto BD,
incernierato agli estremi, deve avere la risultante di
VD e HD passante per B (il momento totale rispetto a
B deve essere nullo quindi la risultante deve avere
braccio nullo).
FC
A
VA
HA
B
45°
VD
© 2006 Politecnico di Torino
D
HD
38
19
Comportamento meccanico dei materiali
Equilibrio esterno
Indeterminazione apparente (6/8)
Quindi:le reazioni vincolari effettivamente incognite
sono solo 3 (VA, HA, VD). Risolvetele!
B
45°
HD
VD
FC
A
D
B
VA
HA
HD = - VD
39
Indeterminazione apparente (7/8)
Vale la pena di notare che è più veloce ed elegante
la soluzione grafica: il corpo è soggetto a tre forze,
di cui due di direzione nota (FC e la reazione in B).
dir. nota
FC
A
dir. nota
B
VA
HA
© 2006 Politecnico di Torino
HD = - VD
Le tre forze devono
incontrarsi in un
punto comune: che
può essere polo dei
momenti, quindi il
momento rispetto
ad esso deve
essere nullo.
40
20
Comportamento meccanico dei materiali
Equilibrio esterno
Indeterminazione apparente (8/8)
La costruzione del triangolo delle forze (equilibrio
alla traslazione) fornisce i valori delle forze.
FC
dir. nota
FC
A
dir. nota
B
VA
HA
HD = - VD
41
Labilità (1/2)
Contro-esempio 3
Ci sono infine casi di vincoli in numero
apparentemente sufficiente, ma posti in strutture
labili:
A
C
B
D
42
© 2006 Politecnico di Torino
21
Comportamento meccanico dei materiali
Equilibrio esterno
Labilità (2/2)
Le reazioni sono 3: VA, HA, VD
ma la struttura è un meccanismo
C
A
VA
B
HA
VD
D
È facile verificare che il tratto BD non può soddisfare
all’equilibrio alla rotazione.
43
Equilibrio esterno
© 2006 Politecnico di Torino
22
Comportamento meccanico dei materiali
Equilibrio esterno
Calcolo di una reazione vincolare (1/3)
Calcoliamo, a titolo d’esempio, selettivamente una
reazione vincolare utilizzando gli spostamenti virtuali:
FC
A
B
C
a
b
FC
A
B
C
VB
45
Calcolo di una reazione vincolare (2/3)
Liberiamo il vincolo in B e assegniamo uno
spostamento virtuale compatibile con i vincoli
residui, quindi una rotazione attorno ad A:
a
b
FC
A
B
C
δϑ
VB
Spostamento verticale in C: a δϑ
Spostamento verticale in B: (a+b) δϑ
© 2006 Politecnico di Torino
46
23
Comportamento meccanico dei materiali
Equilibrio esterno
Calcolo di una reazione vincolare (3/3)
Il lavoro virtuale vale:
-FC a δϑ + VB (a+b) δϑ =0
a
da cui: VB = FC
a+b
FC
A
B
C
δϑ
a δϑ
VB
(a+b) δϑ
47
Equilibrio esterno
© 2006 Politecnico di Torino
24
Comportamento meccanico dei materiali
Equilibrio esterno
Relazioni grafiche tra velocità (1/3)
La compatibilità cinematica delle leggi di corpo rigido
implica che data una velocità v P in P, e data una
velocità v A in A,
compatibile, la
A
velocità v X in X deve
essere compatibile
con ambedue. Quindi,
uguali proiezioni sulle
P
congiungenti.
X
49
Relazioni grafiche tra velocità (2/3)
Sottraendo ovunque la velocità vP di P (somma
vettoriale col vettore verde = − vP ) si ottengono
i vettori blu che
rappresentano il
A
solo moto rotatorio
relativo al punto P.
=0
X
P
50
© 2006 Politecnico di Torino
25
Comportamento meccanico dei materiali
Equilibrio esterno
Relazioni grafiche tra velocità (3/3)
I vettori così ottenuti sono:
A
P
X
ortogonali alle
rispettive
congiungenti con il
punto P
proporzionali alla
distanza tra il
punto (di cui sono
velocità relativa) e
il punto P.
51
Significato del momento di una forza (1\2)
Indicato con il vettore blu lo spostamento δAP relativo
(virtuale) del punto A rispetto a P (moto relativo di
rotazione) il lavoro della forza nella direzione dello
spostamento virtuale dovuto alla rotazione è …
FA
ϕ
A
δϑ
P
FA ⋅ i PAδϑ =
= FA PA δϑ cos ϕ
52
© 2006 Politecnico di Torino
26
Comportamento meccanico dei materiali
Equilibrio esterno
Significato del momento di una forza (2\2)
Nota bene: significato di “momento di una forza”
FA
ϕ
FA
A
PA cos ϕ
ϕ
(i PA ) δϑ
P
FA cos ϕ
(i PA ) δϑ cos ϕ
FA ⋅ iPA δϑ = lavoro = FA PA cos ϕ δϑ
{
momento
53
Equivalenza tra sistemi di forza (1/4)
Equivalenza per traslazione di una forza lungo la
sua retta d’applicazione:
X
F' ' X
F' X
P
che la forza sia F' x o F' ' x (uguali in modulo)
non cambia né il contributo della forza alla
somma delle forze, né il suo momento rispetto
a un polo P.
54
© 2006 Politecnico di Torino
27
Comportamento meccanico dei materiali
Equilibrio esterno
Equivalenza tra sistemi di forza (2/4)
Equivalenza per traslazione di una forza su una
retta d’azione parallela a quella data:
Forza F' in X' :
H’P
X’
lavoro virtuale=
= F '⋅ δP + δϑ (F '⋅ iPX ' ) =
F'
P
= F '⋅ δP + δϑ F ' PH'P
55
Equivalenza tra sistemi di forza (3/4)
Il lavoro virtuale di F’ si può scrivere:
F '⋅ δP + δϑ F ' PH'P
= F '⋅ δP + δϑ F ' PH''P + δϑ F ' H''P H'P
con: F ' = F ' ' = F ⇒ = F ''⋅ δP + δϑ F PH''P + δϑ F H''
P H'P
{
X’
d
d
H’P
H’’P
F'
F ''
X’’
P
56
© 2006 Politecnico di Torino
28
Comportamento meccanico dei materiali
Equilibrio esterno
Equivalenza tra sistemi di forza (4/4)
F '⋅ δP + δϑ F ' PH'P = F ''⋅ δP + δϑ F PH''P
lavoro di F ' in X'
X’
F'
lavoro di F '' in X ' '
d
X’’
F ''
+δϑ F d
lavoro del
momento di
trasporto
Una forza F
trasportata su una
H’’P retta parallela a
distanza d produce un
medesimo lavoro
P
virtuale se si aggiunge
M un momento di
trasporto: M=F d 57
H’P
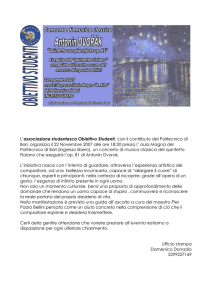
Coppia (1/2)
Due forze di uguale modulo e di segno opposto
costituiscono una “coppia”,
la cui risultante è nulla
il cui momento rispetto a un punto P vale:
b
F
F
H’P
F H'P P − F H' 'P P =
H’’P
= F(H'P P − H' 'P P ) =
=Fb
P
Il momento di una coppia di forze è invariante al
variare del polo rispetto a cui si calcola il momento
58
© 2006 Politecnico di Torino
29
Comportamento meccanico dei materiali
Equilibrio esterno
Coppia (2/2)
Trasportando le due forze della coppia parallelamente
a loro stesse di una comune quantità d
il momento di trasporto complessivo è: +F d – F d=0
d
b
F
b
F
P
Una coppia di forze, brevemente “coppia”, ha
momento di trasporto nullo.
© 2006 Politecnico di Torino
59
30