INTRODUZIONE ALLA DITATTICA
LABORATORIALE
TERZO INCONTRO
FOTOGRAFIAMO IL MOTO
Strumentazione
Necessaria: fotocamera compatta o reflex in grado di
utilizzare tempi di esposizione di almeno un secondo,
lampada stroboscopica, anche quella dello smartphone,
Consigliata: una torcia in modo da illuminare la scena
senza spostarsi per accendere e spegnere la luce,
carta millimetrata, righelli, calcolatrice, applicativi di
calcolo o rappresentazione dati, applicativo di
fotoritocco, compassi e righelli
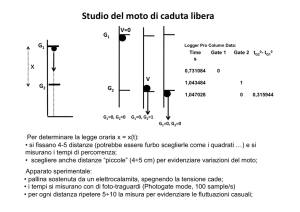
Facciamo la prima foto stroboscopica facendo attenzione a:
preparare la lampada strobo con una frequenza di lampeggiamento opportuna e commisurata alla velocità
dell’oggetto che vogliamo fotografare. Per un moto rettilineo uniforme o uniformemente accelerato in piano
sono sufficienti 5-8 lampi al secondo, per la caduta libera un po’ di più ( 10 – 12 )
Posizionare un oggetto di riferimento di lunghezza nota e facilmente distinguibile ad esempio due aste a 50
cm di distanza l’una dall’altra
Oscurare l’ambiente e impostare la fotocamera in modo che l’otturatore resti aperto un tempo sufficiente a
cogliere una diecina di lampi, consiglio circa due o tre secondi che è il tempo scelto dalle comuni fotocamere
compatte in modalità fuochi di artificio.
L’operatore alla fotocamera gestisce lo start, è preferibile che dia il segnale di partenza del corpo un attimo
dopo che ha iniziato a fotografare.
L’operatore alla lampada deve aver cura di tenere il corpo in movimento nel cono di luce della lampada
strobo, per evitare fastidiosi riflessi è consigliabile illuminare dall’alto verso il basso e spegnere la lampada
appena ha termine il moto.
Qualora l’esposizione continuasse oltre il termine del moto l’operatore alla fotocamere può evitare fastidiose
sovraesposizioni posizionando una mano davanti all’obiettivo.
Con questi semplici accorgimenti il risultato è garantito !!!
Ma se la foto fosse troppo scura si può usare un programma di fotoritocco come Gymp o
Photoshop : modificando luminosità, contrasto e curve si ottengono foto facilmente
interpretabili.
Io personalmente consiglio di provare 5 o 6 volte con la luce accesa in modo da trovare il giusto
sincronismo tra gli operatori, lavorare al buio non è semplice!
Un buon risultato può essere il seguente:
Alla ricerca di una legge: il moto rettilineo uniforme
Ora che abbiamo la foto al fase successiva è di acquisire i dati utili allo studio del moto
ricercando delle regolarità.
La prima osservazione deve portare gli studenti a osservare le distanze tra le posizioni dei
carrellini scegliendo dei punti rappresentativi, le aste, per esempio. Può essere utile l’uso di un
compasso. In questa fase, di pura ricerca qualitativa, lascerei perdere le misure numeriche. La
conclusione è che, essendo i lampi ad intervalli di tempo regolari, in tempi uguali si hanno
spostamenti uguali. È il momento quindi di formalizzare il concetto di velocità.
(2.1) Successivamente si può procedere, sempre con l’uso del compasso, riportando su un piano
cartesiano, in cui le ascisse rappresentano i tempi, le distanze dalla posizione del primo carrello
alle posizioni successive. Si dovrebbe ottenere una serie di punti approssimativamente allineati.
In questo modo le caratteristiche qualitative del moto uniforme dovrebbero essere chiare.
Si può passare ora ad uno studio più quantitativo associando l’ordinata con i cm letti
direttamente dalla foto ed infine, disponendo di un riferimento precedentemente posizionato,
si può dedurre la proporzione che converte i cm-foto in cm-reali.
Esistono diverse alternative tutte valide; ad esempio si possono misurare le distanze in pixel e
ottenere velocità in pixel/secondi, oppure si può costruire uno strumento di misura tarato in
funzione delle dimensioni reali.
Usare metodologie di acquisizione diversificate può essere una interessante base di partenza
per gestire il concetto di velocità vista come rapidità di variazione di una grandezza e
soprattutto evidenzia la caratteristica di invarianza della legge fisica: si possono usare metri,
cm-foto, pixel ma in ogni rappresentazione si ottengono le stesse regolarità.
Come ultimo step vi è la ricerca del fitting lineare e la conseguenze legge oraria del moto. Si
può ottenerla manualmente o con le procedure dei vari fogli di calcolo classici.
Si veda il file realizzato da uno studente: Moto_unif_legge.xls
Lo studio e la rappresentazione dell’errore può essere gestito in base alle osservazioni e alle
esigenze del caso ( per i tempi si può osservare che l’indicatore della lampada strobo
difficilmente rimaneva fisso, per gli spazi l’errore è dovuto alla scala dello strumento di misura
e alla non nitidezza dell’immagine). Per non appesantire la trattazione suggerisco di non
approfondire troppo!
Gli studenti più tecnologici possono tranquillamente esaltare le loro abilità grafiche e
multimediali nella rappresentazione di dati, nel calcolo dei fitting e nelle conclusioni.
(2.2) Simulazioni numeriche e grafici:
Prerequisiti: saper usare un foglio di calcolo a livello di formule iterative, saper costruire un
grafico a istogrammi e a dispersione, conoscere il concetto di velocità.
Scopo: partendo dalla conoscenza della posizione iniziale di un oggetto, conoscendo la
caratteristica del moto, stabilire in modo iterativo la posizione dell’oggetto in istanti successivi
quello di partenza
Procedimento: usando il fatto che in intervalli di temo uguali vengono percorse distanze uguali si
calcola la distanza totale come somma di distanze parziali
Motivazione: in questo modo si introduce tacitamente il concetto di discretizzazione di
un’equazione differenziale e si fornisce la base del metodo ad un passo dovuto ad Eulero.
L’esempio concreto è nel file Moto_unif_simul.xls
Ad un livello più avanzato si può implementare un semplice algoritmo in un qualsiasi linguaggio di
programmazione
Alla ricerca di un’altra legge: il moto rettilineo uniformemente accelerato
Le procedure di acquisizione dell’immagine restano le stesse del moto uniforme ma la regolarità
da ricercare è decisamente diversa: qui oltre che realizzare un grafico del tipo 2.1 raccomando
di rappresentare, sempre su un grafico cartesiano dove nelle ascisse vi sono gli intervalli di
tempo in successione, le variazioni di posizione. Questo può essere fatto con il compasso, il
righello, i pixel….. ma anche con le forbici producendo un risultato del genere della seguente
figura:
(2.3)
Ottenuta ritagliando a gruppi regolari le posizioni delle immagini dalla foto acquisita.
Osserviamo che, essendo gli intervalli di tempo regolari ( nell’esempio di 5 lampi ciascuno ) il
grafico ottenuto rappresenta l’istogramma delle velocità medie. (confrontare con l’istogramma
delle posizioni nel grafico del moto uniforme.
Gli studenti più tecnologici possono ottenere lo stesso risultato con applicativi di fotoritocco.
(come ho fatto io!).
In questo caso è evidente l’aumento regolare della velocità media. Risulta così caratterizzato
qualitativamente il moto uniformemente accelerato ed è ora conveniente introdurre il concetto
di accelerazione e si può tracciare il fitting lineare riferito al punto medio di ciascuna barra.
Un punto fondamentale da sottolineare è che in fisica si misurano solo grandezze medie e che le
grandezze istantenee sono modelli convenienti ma di matrice matematica che trovano una
naturale applicazione negli sviluppi teorici della disciplina per produrre previsioni e congetture.
Non è difficile passare alla trattazione quantitativa usando i metodi ormai noti.
E’ molto utile ed interessante la costruzione e l’analisi di un foglio di simulazione realizzato con
la stessa tecnica di 2.2 in cui si ha un aumento lineare delle velocità in accordo con la figura 2.3
mentre risulta fondamentale la scelta della media delle velocità nel calcolo degli spostamenti
parziali e di conseguenza della posizione.
Per determinare le caratteristiche del moto e per realizzare una simulazione è stato necessario
operare scelte costruttive, ad una prima indagine, di sola convenienza, ma che in realtà
costituiscono delle proprietà esclusive del moto.
Nel dettaglio:
dall’analisi delle ipotesi costruttive della simulazione si evince che
1)
la velocità media è la media delle velocità
mentre dalla scelta dei punti per fittare l’istogramma delle velocità si ottiene che
2)
la velocità media è funzione lineare del tempo medio
Tali proprietà sono esclusive del moto uniformemente accelerato.
Per ultimo si può determinare la legge oraria osservando sempre dalla figura 2.3 che lo
spostamento totale si ottiene sovrapponendo le barre dell’istogramma delle velocità che non è
nient’altro che l’area compresa tra il fitting lineare dei punti medi e l’asse dei tempi.
Dimostriamo la proposizione 1)
Per ipotesi sappiamo che, scelti a caso due istanti t1 e t2 , vale la relazione:
2.4
S (t2 ) S (t1) v(t1) v(t2 )
t2 t1
2
vogliamo dimostrare che, supponendo S(t) sufficientemente regolare, l’accelerazione è
costante, o equivalentemente che la derivata seconda di V(t) è nulla.
Osserviamo che vale l’uguaglianza:
2.5
S (t2 ) S (t1)
t2
t1 , t1
t v(t)dt
0
1
Ora, supponendo per assurdo che, senza perdere in generalità, sia V (t ) 0 in un intervallo I di
estremi t1 e t2; la funzione V(t) risulterebbe in tale intervallo strettamente convessa e quindi il
suo grafico starebbe tutto al di sopra del segmento che unisce i punti ( t1 , V(t1) ) e ( t2 , V(t2) ).
Come conseguenza si avrebbe che
2.6
S (t2 ) S (t1)
t2
v(t)dt
t1
v(t1) v(t2 )
(t t )
2 1
2
Relazione che contraddice l’ipotesi 2.4.