POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Capitolo 5
Impianto Elettrico
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.1
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.1. Introduzione
L'impianto elettrico ha la funzione di distribuire energia alle varie utenze ed è presente in
tutti velivoli in forma più o meno sviluppata.
Già nei primi velivoli a motori era presente un impianto elettrico, se non altro come accessorio del motore per provvedere all'accensione; a questo si aggiunsero poi dispositivi di illuminazione, strumenti, apparecchiature radio, motori, ecc.
Se si esaminano diverse categorie di utenze a bordo di un velivolo (tab. 5.1), si vede che
per alcune di esse non esiste nessuna alternativa valida all'energia elettrica.
Attuatori
Illuminazione
Riscaldamento
Avionica
Elettrica
Pneumatica
Idraulica
Meccanica
Tab. 5.1 - Principali utenze e tipi di energie necessarie
Esistono quindi categorie di utenze nelle quali l'energia elettrica è insostituibile, altre nelle
quali si presenta la possibilità di scelta; così ad esempio per l'impianto antighiaccio è possibile
utilizzare aria calda prelevata dal gruppo motopropulsore, ma esistono alcune zone, come le
prese d'aria degli strumenti anemometrici e i bordi d'attacco delle pale delle eliche, per le quali
è decisamente preferibile utilizzare energia elettrica.
L'impianto elettrico è un impianto di trasformazione e distribuzione di energia; occorrerà
quindi analizzare come ottenere l'energia elettrica, come distribuirla e controllarne l'impiego.
5.2. Tipi di alimentazione
Dovendo ottenere dell'energia elettrica si impongono alcune scelte preliminari sul tipo di
alimentazione adottata. Infatti è possibile sia pensare ad impianti in corrente continua, che in
corrente alternata, ed è possibile costruire impianti con diversi valori di tensione nominale.
Teoricamente si può pensare per ogni impianto di ottimizzare i valori di tensione e di frequenza; in pratica questo non si dimostra economicamente valido perché obbligherebbe ad
una progettazione e validazione di tutti i componenti; si è quindi giunti ad una standardizzazione che consente la scelta fra pochi valori tipici (tab. 5.2). Tali valori sono il compromesso
di diverse esigenze, come di seguito descritto.
Tipo di corrente
Continua
Alternata mono/trifase
Tensione (V)
28
115/200
Frequenza (Hz)
Variabile o 400
Tab. 5.2 - Standard di alimentazione
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.2
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Dalla 1A legge di Ohm:
V=RI
dove V è la tensione, R la resistenza e I l’intensità di corrente. Dalla 2A legge:
R
L
S
dove è la resistività del materiale conduttore, L la lunghezza e S l’area del conduttore.
Dall’espressione della potenza si ha:
W VI
V2
R
1
L
V 2S
da cui:
S
W L
V
2
Questo significa che a pari potenza un innalzamento della tensione porta ad una forte riduzione della sezione, e quindi del peso, dei conduttori.
Uno dei principali motivi per l’impiego della corrente continua consiste nella possibilità di
utilizzare accumulatori, per limitarne il peso si è fissato lo standard della tensione in corrente
continua a 28 V; con gli attuali sviluppi tecnologici delle batterie basate sull’impiego di metalli molto più leggeri del piombo, si ha la tendenza a passare a tensioni superiori, sono attualmente in fase di sperimentazione sistemi a 270 VDC per le cosiddette versioni di velivolo
more electric. Per quel che concerne la tensione dell’alternata invece, bisogna garantire un
adeguato isolamento e inoltre non conviene scendere oltre una certa sezione del conduttore
aumentando la tensione, perché inizierebbe a diventare troppo importante il peso della guaina
isolante e troppo debole la resistenza meccanica del conduttore. 115/200 VAC sono generati
da sistemi trifase di peso ed ingombro contenuti. Infine, i 400 Hz di frequenza sono stati scelti
come ottimali tra esigenze di leggerezza dei generatori (a pari potenza è più leggero un generatore più veloce) e meccaniche (limite alla velocità di rotazione); a pari potenza un motore
che gira più velocemente richiede meno coppia e quindi meno corrente e questo si riflette su
tutto l’impianto. Nonostante che le tecnologie attuali potrebbero ormai spostare questi valori
ottimali, non è ancora prevista una modifica degli standard.
5.3. Scelta del tipo di impianto
Dato che lo standard prevede la possibilità di realizzare impianti con vari tipi di corrente
(continua, a frequenza variabile e a frequenza costante), si impone la necessità di operare fra
queste una scelta.
A tale scopo è necessario analizzare le varie utenze elettriche e le loro necessità; evidentemente queste variano in ogni velivolo, ma in prima approssimazione possono essere divise a
titolo di esempio nelle categorie riportate in tab. 5.3.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.3
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
% carico
totale
5070
1040
510
520
Illuminazione e riscaldamento
Motori
Comandi e controlli
Avionica
Batteria
DC
AC
freq. var.
AC
400 Hz
Tab. 5.3 - Utenze principali, carico sull’impianto e alimentazione richiesta
Come si può notare per la parte più consistente del carico l'impiego di corrente continua o
alternata è indifferente; per alcuni organi essenziali, come gli organi di comando e controllo
(relè, spie, indicatori di misura), è preferibile la corrente continua, per gli accumulatori è indispensabile disporre di corrente continua, mentre per l'avionica è preferibile ricorrere a corrente
alternata a frequenza costante.
In pratica quindi nella maggioranza dei velivoli occorre disporre sia della corrente continua
che della corrente alternata a 400 Hz; la scelta non sarà quindi sul tipo di impianto, ma sul
tipo dell'energia elettrica generata. Si tende ad evitare, infatti, di generare energia elettrica di
entrambi i tipi, ma si costruiscono impianti nei quali la generazione primaria di energia elettrica (ossia la trasformazione di energia meccanica in energia elettrica) è del tipo continuo o
del tipo alternato. In generale velivoli d’aviazione generale, trasporto leggero, executive e
trasporto regionale sono dotati di impianto primario in DC; velivoli di linea con motori a turbogetto o turbofan e militari utilizzano impianto primario in AC. In pratica la discriminante è
nella potenza installata.
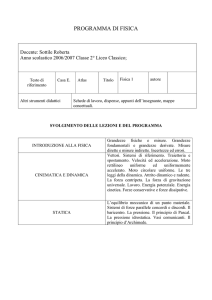
In entrambi i casi occorrerà provvedere ad una trasformazione dell'energia elettrica anche
nell'altra forma per provvedere all'alimentazione di quella parte del carico per il quale la generazione primaria non è adatta (fig. 5.1).
AC
GENERATOR
AC
USES
AC DC
CONVERSION
DC
USES
BATT
AC PRIMARY
DC PRIMARY
BATT
DC
GENERATOR
DC
USES
DC AC
CONVERSION
AC
USES
Fig. 4.1 – Primary and secondary power
Fig. 5.1 - Due soluzioni possibili di impianto
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.4
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.4. Generazione di corrente elettrica
La generazione dell'energia elettrica avviene attraverso generatori, dinamo o alternatori,
che possono essere azionati meccanicamente da:
i propulsori attraverso opportuni riduttori;
motori idraulici o pneumatici;
A.P.U. (Auxiliary Power Unit), quando il velivolo è fermo a terra;
R.A.T. (Ram Air Turbine), un’elichetta posta al vento relativo in casi di emergenza;
Alternativamente un velivolo parcheggiato può disporre di energia elettrica tramite connessione a terra.
Normalmente si ha il prelievo di energia meccanica dai propulsori per l’azionamento dei
generatori elettrici. Nei velivoli plurimotori si ha comunemente un generatore per motore,
mentre velivoli monomotori spesso ci sono due generatori collegati all'unico motore. Si ha
sempre uno o più generatori sull’APU. Il Boeing 747 per esempio ha impianto primario in
alternata con 4 alternatori da 60 KVA sui 4 propulsori e due alternatori da 90 KVA sull’APU.
Il BAE 146, pur essendo quadrimotore, ha solo due alternatori da 40 KVA sui motori esterni
ed uno sull’APU. Il SIAI S 211 ha l’impianto primario in corrente continua, con starter - generatore sul propulsore, e corrente alternata ottenuta da due invertitori. L’ATR-42 ha una configurazione anomala: ognuna delle due turboeliche ha sia uno starter - generatore che un alternatore, generando quindi entrambi i tipi di corrente contemporaneamente.
L’impianto elettrico riveste una importanza talmente elevata che si prevede sempre la possibilità di disporre di energia elettrica, almeno per un certo tempo, anche in caso di guasto di
tutti i propulsori.
Una fonte di energia elettrica sempre presente è costituita dagli accumulatori, che devono
soddisfare l'esigenza di creare una riserva di energia da utilizzare in mancanza di generazione
per guasto dell'impianto o del propulsore, in caso di assorbimenti superiori alla potenza fornita
dai generatori (batterie tampone) e ovviamente quando i propulsori sono fermi.
In condizioni di emergenza, oltre alle batterie e alle R.A.T., possono essere utilizzati anche
generatori trascinati da turbinette alimentate dalla combustione di cartucce pirotecniche.
5.4.1 Impianto primario in continua
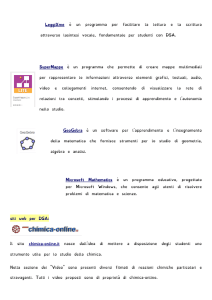
La macchina tipicamente usata per la generazione di corrente continua è la dinamo; la dinamo è costituita da un certo numero di spire (rotore) che ruotano in un campo magnetico
permanente (statore).
In fig.5.2 è rappresentata per semplicità una sola spira; in questo modo si crea in ogni spira
del rotore una forza elettromotrice variabile sinusoidalmente. La corrente è prelevata dal rotore attraverso spazzole striscianti su un collettore; se il collettore è diviso in due settori semicircolari, ad ogni giro di una singola spira si riescono a prelevare due semisinusoidi dello stesso segno. Fissata la velocità angolare del rotore, la tensione totale prelevata ha un valore sostanzialmente costante dato dalla somma delle tensioni di ogni spira (fig. 5.2).
Il problema è che la velocità angolare non è in pratica costante, essendo il dispositivo azionato da un propulsore di bordo, e quindi le dinamo devono essere corredate di regolatori per
garantire la costanza della tensione. Nel caso della dinamo tradizionale, si usa come generatore del campo magnetico un elettromagnete, la cui intensità viene regolata in base all’uscita.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.5
TENSIONE
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
1 SPIRA
TENSIONE
TEMPO
11 SPIRE
TEMPO
Fig. 5.2 - Dinamo
La dinamo ha il vantaggio di essere una macchina reversibile, cioè può essere usata anche
come motore ed infatti in molti casi viene utilizzata oltre che come generatore anche come
motore di avviamento. Questo è possibile con motori a turbina di potenza limitata; per motori
a turbina di maggiore potenza, la coppia necessaria per l'avviamento è troppo elevata per uno
starter - generatore e si preferisce dividere i compiti fra due macchine separate, una dinamo
per la generazione di energia ed un motore per l'avviamento; per i motori alternativi è necessario un motorino elettrico per l'avviamento, ma esso può essere sottodimensionato perché deve
funzionare per tempi molto brevi; per i grossi motori a turbina l'avviamento avviene normalmente prelevando energia pneumatica dall'APU.
Lo svantaggio di questo tipo di generatore è dato dai contatti striscianti, che comportano
un’intensa usura e degrado della conducibilità elettrica; inoltre la bassa densità dell’aria, che il
tipico ambiente operativo del velivolo, favorisce la formazione di archi voltaici e il consumo
delle spazzole.
Di conseguenza, rinunciando al vantaggio offerto dalla dinamo di essere una macchina reversibile, si preferisce generare la corrente continua avviene attraverso generatori senza spazzole, in pratica alternatori la cui uscita viene raddrizzata e stabilizzata. Questa tecnica, del
resto diffusa anche in campo automobilistico, consente di avere generatori a pari potenza di
dimensioni e pesi inferiori ed elimina il problema della manutenzione delle spazzole.
5.4.2 Impianto primario in alternata
Gli alternatori funzionano sullo stesso principio delle dinamo, cioè sull’induzione di una
forza elettromotrice in un’armatura metallica tramite un campo magnetico variabile. Facendo
riferimento alla fig. 5.2 precedente, è sufficiente sostituire i due semi-collettori con due collettori circolari completi per avere, in uscita, una tensione sinusoidale completa. Ovviamente, un
alternatore siffatto soffre degli svantaggi della dinamo, ossia i contatti striscianti.
Se però l’armatura metallica è lo statore ed il campo magnetico è il rotore, allora si ottiene
un alternatore senza contatti striscianti.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.6
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Per la generazione della corrente alternata vengono usati alternatori monofase o, molto più
comunemente, trifase; in ogni caso l'alternatore ha la caratteristica di creare una corrente la cui
frequenza dipende dalla velocità angolare del generatore. Nel trifase vi sono 3 avvolgimenti
monofase, sfasati di 120 ed immersi nel campo magnetico rotante (fig. 5.3). Non vi sono
spazzole ed il tutto viene raffreddato ad aria.
Solitamente le 6 uscite AC vengono connesse come in figura e ridotte a 4 uscite, cioè un
neutro e tre fasi. Ovviamente è disponibile
l’utilizzo monofase o trifase.
Accoppiando così il generatore al propulsore si ha una frequenza f che dipende dal
regime del propulsore stesso, ovvero dalla
velocità angolare n (in rpm) e dal numero di
poli p, secondo la relazione:
f
Fig. 5.3 - Alternatore trifase
np
120
La tensione in uscita è funzione invece del
numero di avvolgimenti, velocità angolare ed
intensità del campo magnetico. Il controllo di
fatto viene effettuato su quest’ultimo tramite
regolatori elettronici.
5.5. Controllo della frequenza
In un impianto elettrico vi sono molte utenze per le quali è indifferente l'impiego di corrente continua o alternata, e quindi la frequenza può essere casuale. Per le utenze che richiedono
però frequenze ben precise (tipicamente alcuni sistemi avionici e motori) è ovvio che tale soluzione non è idonea; d'altra parte occorre anche osservare che, nella maggioranza dei casi di
generazione in corrente alternata, si tratta di velivoli plurimotori di grosse dimensioni e di
impianti elettrici di elevata potenza con più generatori accoppiati ai diversi propulsori; nasce
quindi anche l'esigenza di collegare in parallelo i diversi generatori, collegamento che è possibile solo se i generatori sono in fase, è quindi indispensabile che per mantenere la fase funzionino in modo sincrono con uguale frequenza.
E’ così necessario controllare la velocità di rotazione dei generatori e
disaccoppiarla dal regime
del propulsore, cosa che
può essere ottenuta ad
esempio mediante un sistema idraulico costituito
Fig. 5.4 - Regolatore idraulico di giri
da una pompa ed un motore, uno dei quali a cilindrata variabile (fig. 5.4).
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.7
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Controllando così la cilindrata, ad esempio della pompa, in funzione della frequenza ottenuta dall’alternatore è possibile avere una frequenza costante e un sincronismo fra i diversi
generatori anche per quanto riguarda la fase.
Questo sistema ha l'inconveniente di trasmettere tutta la potenza per via idraulica e quindi
con una perdita dovuta ai rendimenti della pompa e del motore idraulico; esistono dispositivi
meccanici alternativi (CSD, constant speed driver) costituiti da un differenziale per cui il grosso della potenza meccanica passa attraverso i planetari mentre un sistema pompa - motore
idraulico introduce una rotazione dei satelliti tale da avere sull'albero di uscita una velocità
costante (fig. 5.5), in questo modo la perdita di potenza dovuta ai rendimenti del sistema
idraulico è limitata al rendimento della frazione di potenza necessaria a correggere la velocità.
Fig. 5.5 – Schema di CSD
Se A e B ruotano nella stessa direzione e con la stessa velocità i satelliti non ruotano e la
scatola del differenziale ruota alla stessa velocità; se le velocità dei due planetari sono uguali e
di verso opposto la scatola del differenziale non ruota. In generale la velocità di rotazione della scatola C del differenziale risulta C
A B
2
; è quindi possibile con il sistema idraulico
introdurre un valore di B tale da mantenere costante C .
Attualmente alternatore e CSD sono riuniti in un unico dispositivo chiamato IDG, integrated drive generator, con risparmio di materiale.
Si osservi che per i generatori collegati all’APU non è in genere necessario un regolatore di
giri, poiché l’APU viene fatta girare sempre a velocità costante.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.8
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Oltre a dispositivi di regolazione della frequenza di tipo meccanico ed idraulico, che hanno
affidabilità e rendimenti inferiori a quella della turbina e dell’alternatore in sé, sono comunque
disponibili, ed oggi preferiti, dispositivi completamente elettronici a componenti solidi, che
hanno inoltre il vantaggio di essere installati lontani dal propulsore, e quindi in condizioni
ambientali più favorevoli. Questi dispositivi si chiamano variable speed constant frequency, o
VSCF, e la loro versione più comunemente usata a bordo è quella dei cicloconvertitori; in essi
l’alternatore genera su 6 uscite tensioni trifase con frequenze più elevate dei 400 Hz; queste
vengono trattate elettronicamente di modo da ottenere uscite a frequenza costante di 400 Hz.
5.6. Conversione AC/DC e DC/AC
Come detto in precedenza, nella maggior parte dei casi un velivolo è dotato di un impianto
elettrico primario in AC o DC, ed uno secondario rispettivamente in DC o AC ottenuto per
conversione dal precedente.
Per soddisfare alle utenze in DC a bordo di un velivolo con sistema primario in AC, si utilizzano trasformatori - raddrizzatori (TRU, transformer rectifier unit), basati su trasformatore
per portare la tensione a 28 V e ponti a semiconduttori per raddrizzare la tensione alternata in
una tensione costante monofase.
Viceversa, per ottenere AC da un impianto primario in DC si usano invertitori allo stato solido (solid state inverters).
Fig. 5.6 – Schema distribuzione
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.9
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.7. Distribuzione dell'energia
L'energia elettrica generata viene distribuita alle utenze attraverso le barre di carico, intendendo per barra un nodo da cui partono i conduttori verso le diverse utenze.
Nell'impianto elettrico esistono un certo
numero di barre indipendenti, ognuna delle
quali alimenta un certo numero di utenze; le
utenze vengono a questo fine suddivise in base
alla loro importanza e rilevanza dal punto di
vista della sicurezza del velivolo; si avranno
così barre essenziali, primarie e secondarie.
Come schematizzato in fig. 5.7, le barre essenziali saranno sempre collegate al gruppo
generatore di potenza, mentre le barre primarie
e secondarie possono essere escluse in conseguenza di guasti ai generatori o alle barre stesse; dovranno quindi esserci degli organi di manovra in grado di escludere le singole barre e
Fig. 5.7 – Schema barre di carico
degli organi di sicurezza e di manovra per il
collegamento delle varie utenze.
5.8 Cavi
Il collegamento dei vari componenti dell'impianto avviene attraverso cavi scelti fra un'ampia tipologia, standardizzati MIL sia dal punto di vista della conduttività che del tipo di isolamento; si usano conduttori di rame e di alluminio, isolati da PVC, nylon, teflon o fibre di vetro.
Nel cablaggio di un velivolo si deve tenere conto di diverse esigenze:
contenere i pesi riducendo le sezioni;
contenere le cadute di tensione aumentando le sezioni;
evitare surriscaldamento per effetto Joule;
utilizzare isolanti resistenti al calore per i cavi in prossimità di fonti termiche;
verificare la compatibilità elettromagnetica con l’avionica, evitando vicinanze tra cavi di
alta potenza e apparati;
considerare la resistenza a sollecitazioni meccaniche, specialmente le vibrazioni.
Come in campo automobilistico, è comune mettere a terra l’impianto attraverso la struttura
dell’aeromobile, quando questa è realizzata con materiale conduttore come le leghe leggere.
Quando un cavo è attraversato da corrente alternata o continua pulsante si comporta come
un’antenna ed interferisce con gli apparati radio. In tal caso si è necessario schermare i cavi
con una calza di maglie di metallo messa a terra.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.10
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Si fa ampio uso di collegamenti smontabili al fine di poter sostituire rapidamente componenti che possono richiedere manutenzione e controlli; si impiegano quindi terminali saldati o pinzati sul cavo e poi fissati con morsetti, viti,
o prigionieri e dadi, oppure connettori multipolari con i
singoli cavi saldati o pinzati.
I cablaggi vengono realizzati con singoli cavi raccolti in
fasci; lo studio della realizzazione dei cablaggi e della loro
installazione costituisce una fase rilevante del progetto
dell'impianto elettrico e richiede tecniche particolari di test
per poterne verificare la correttezza dell'esecuzione. E’
molto comune l’impiego di CAD per l’ottimizzazione dei
cablaggi.
Fig. 5.8 - Terminali
Per il collegamento dei cavi si ricorre all’impiego di capicorda, preferibilmente pinzati anziché saldati.
5.9 Collegamenti e connettori
Per i cablaggi complessi, normalmente più diffusi in collegamenti di apparecchiature elettroniche che non di potenza, si usano estensivamente connettori facilmente smontabili per
poterli facilmente rimuovere per manutenzione dei componenti.
I connettori sono normalmente multipolari e hanno sistemi di blocco per impedire lo scollegamento sotto effetto di accelerazioni e vibrazioni.
Fig. 5.9 – Esempi di connettori
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.11
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.10. Motori elettrici
Vi sono diverse applicazioni dei motori elettrici a bordo di velivoli:
deflessione di superfici di manovra;
azionamento valvole idrauliche e pneumatiche;
avviamento propulsori;
trascinamento pompe idrauliche;
rotazione giroscopi;
azionamento ventole di raffreddamento.
Il primo problema da affrontare è la scelta di un motore AC o DC.
Come già osservato in precedenza, il motore in corrente continua ha la stessa struttura di
una dinamo: applicando una tensione ai morsetti di una spira immersa in una campo magnetico, questa viene sottoposta ad una coppia per interazione col campo magnetico. Il verso di
rotazione dipende dal segno della tensione applicata o del campo magnetico, la coppia che si
ottiene dipende dall’intensità della tensione o del campo.
I motori DC sono in genere usati per impieghi non continuativi o a velocità variabili: azionamenti lineari o rotativi, controllo di valvole, avviamento propulsori.
Per quanto riguarda la corrente alternata sui velivoli vengono usualmente installati motori
sincroni trifase e, più comunemente, motori ad induzione. In un motore sincrono lo statore
genera un campo magnetico rotante, eccitato dalla tensione trifase in ingresso. Due avvolgimenti opposti generano un campo intenso, con un contributo minore da parte delle altre due
coppie di avvolgimenti . Durante un intero ciclo della corrente in ingresso, il campo magnetico copre un’intera rotazione. Se coassiale con lo statore si trova un rotore, costituito da
un’armatura eccitata in DC, il campo magnetico generato dallo statore si accoppia con quello
del rotore, generando una coppia.
Il problema principale di questo tipo di accoppiamento è che l’avviamento non è possibile,
perché il momento d’inerzia del rotore lo rende incapace di accelerare per seguire il campo
magnetico rotante generato dallo statore; in altri termini un motore sincrono siffatto non possiede una coppia di avviamento, ma la coppia di interazione tra i due campi si genera solo
quando il rotore sta ruotando in modo sincrono col campo magnetico generato dallo statore.
Per questo motivo è necessario un particolare avvolgimento addizionale, costituito da una
gabbia di barre di rame cortocircuitate; il campo magnetico rotante generato dallo statore induce una piccola forza elettromotrice nelle barre di rame; essendo queste in cortocircuito, viene generate un’intensa corrente nella gabbia, la quale a sua volta genera un campo magnetico
perfettamente accoppiato con quello rotante. A causa dell’interazione tra i due campi, la gabbia, e quindi il rotore, entra in rotazione; questa fase di avviamento è effettuata senza eccitare
gli avvolgimenti principali del rotore; quando però questo ruota sincrono col campo rotante,
gli avvolgimenti vengono alimentati e quindi si genera il campo magnetico DC, che aggancia
definitivamente il rotore al campo magnetico rotante dello statore.
In un motore ad induzione, lo statore è molto simile a quello del motore sincrono. Il rotore
è costituito da un cilindro metallico, sulla cui superficie laterale sono ricavati degli incavi in
cui sono inserite delle barre di rame, collegate tra loro da un anello di rame o ottone. Il campo
magnetico rotante generato dallo statore induce una forza elettromotrice nel rotore, e quindi
un altro campo magnetico, che tende ad opporsi alla variazione del campo magnetico rotante;
si genera una coppia tra il rotore e lo statore, dovuta all’interazione tra i due campi, che tenta
di annullare il movimento relativo tra statore e rotore: quest’ultimo, in altri termini, tende a
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.12
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
mettersi in rotazione inseguendo il campo magnetico rotante. In realtà se ruotasse alla stessa
velocità angolare, il rotore non vedrebbe un campo magnetico rotante, e quindi non si genererebbe la coppia; il rotore quindi si metterà a ruotare ad una velocità inferiore di quella del
campo magnetico; questo scorrimento sarà tanto maggiore quanto maggiore sarà la coppia
applicata all’asse motore.
I motori AC sono in genere vantaggiosi per utilizzi continuativi e velocità costanti, come il
trascinamento di pompe idrauliche e combustibile e la messa in rotazione degli strumenti giroscopici.
5.11. Organi di manovra e protezione
Per quanto riguarda le manovre sui circuiti elettrici
queste vengono eseguite attraverso interruttori o relè.
Gli interruttori permettono l'apertura e la chiusura di
circuiti con un comando manuale o con sensori di posizione, i relè attraverso un comando elettrico. Vengono utilizzati i relè quando il comando di un circuito
proviene da automatismi, da combinazioni di informazioni provenienti da un comando manuale e da sensori
di posizione, o quando si devono commutare potenze
di un certo rilievo per cui si preferisce portare in cabina solo cavi per bassa potenza con ovvi vantaggi in
peso.
Per la protezione dell'impianto da corto circuiti o
assorbimenti comunque troppo elevati vengono utilizzati fusibili o interruttori di massima corrente (breakers).
Fig. 5.10 - Fusibile
Nel caso del fusibile si ha una rottura del componente stesso e quindi la
necessità di una sua sostituzione per
ripristinare l'alimentazione del circuito
da esso protetto. Con gli interruttori di
massima corrente il riscaldamento provoca la deformazione di una lamina e
Fig. 5.11 - Breaker
lo sganciamento di un interruttore che
può essere ripristinato premendo un pulsante. Entrambi i metodi vengono impiegati: ovviamente il ripristino di un breaker è un'operazione molto più semplice della sostituzione di un
fusibile. Il breaker può inoltre far parte direttamente dell’interruttore di comando dell’utenza,
quando questo non è indiretto tramite relè.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.13
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
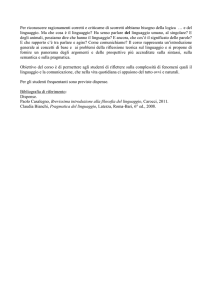
Entrambi i dispositivi sono basati su componenti che risentono del riscaldamento dovuto al
passaggio della corrente: la figura 5.12 mostra schematicamente la loro risposta in termini di
tempo di intervento in funzione dell’intensità di corrente per varie temperature ambiente.
È possibile realizzare fusibili e breaker dove a pari corrente il tempo di intervento è molto
diverso ed avere quindi fusibili istantanei o ritardati.
Ad esempio nella figura 5.13 sono riportate le curve tipiche di due fusibili da 100 A con
tempi di intervento diversi; in particolare si osserva che a 110 A uno dei due interviene in 5ms
e l’altro in 20 ms.
60
Tempo intervento [ms]
50
40
30
20
10
0
0
50
100
150
200
250
300
Corrente [A]
Fig. 5.12 – Tempo di intervento
Fig. 5.13 – Confronto fra fusibile rapido e ritardato
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.14
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.12 Accumulatori
L’accumulatore è costituito da una batteria di celle in cui energia chimica viene trasformata
in energia elettrica e viceversa. Il suo scopo è anzitutto quello di conservare una riserva di
energia a bordo da utilizzare per l’avviamento motori a velivolo parcheggiato e non assistito
oppure in condizioni di emergenza; scopo secondario è l’attenuazione di fluttuazioni di tensione.
La procedura di avviamento motori dipende dalla categoria del velivolo. In un piccolo velivolo con motore a pistoni o a turbina di bassa potenza, l’accumulatore fornisce energia elettrica ad un motore d’avviamento calettato sull’albero del propulsore. In un velivolo con motore
a turbina di maggiori dimensioni, l’accumulatore alimenta un motore elettrico che avvia
l’APU, con pompe idrauliche e alternatori scollegati per ridurre la coppia di reazione. Una
volta portata l’APU a regime, il velivolo dispone della potenza pneumatica sufficiente
all’avviamento dei turbomotori.
I parametri più significativi che caratterizzano una batteria sono la capacità, la corrente
massima erogabile e la densità di energia accumulabile. La capacità si esprime in Ah (amperora): essendo fissata la tensione nominale di funzionamento questa indica l’energia accumulabile; viene espressa in questi termini perché evidenzia il legame fra l’intensità di corrente ed il
tempo in cui questa è disponibile se la batteria è completamente carica. In realtà questo fattore
dipende anche da un’efficienza, la quale è legata all’intensità della corrente di carica o scarica
della batteria; al crescere dell’intensità di corrente di carica o scarica, diminuisce l’efficienza e
quindi l’effettiva capacità, esiste di conseguenza un valore massimo di corrente erogabile dalla batteria. La ricarica ottimale è a corrente costante con intensità non superiore al 7% del valore di capacità, il che significa che la tensione deve aumentare durante la carica. La densità di
energia si esprime in Wh/kg ed è naturalmente un indice di grande importanza per le applicazioni aerospaziali.
La classica batteria è quella con armature al piombo annegate in elettrolito di acido solforico (H2SO4). Un’armatura è fatta di biossido di piombo (PbO2) e l’altra di piombo spugnoso.
Ogni cella è in grado di fornire una tensione di 2.1 V a circuito aperto. La reazione reversibile
durante la scarica consiste nella combinazione del piombo dei due elettrodi con l’acido:
PbO2 + Pb + 2H2SO4 2PbSO4 + 2H2O
Questa reazione non è bilanciata ai due elettrodi e genera elettroni:
PbO2 + 4H+ + SO4-- + 2e- PbSO4 + 2H2O
Pb + SO4-- PbSO4 + 2eIl metodo di controllo più diretto dello stato di carica è attraverso la misura della densità
dell’elettrolito, che va da 1300 kg/m3 in condizioni di massima carica a 1150 kg/m3 quando è
pressoché scarica. La tensione corrispondente della cella scende a circa 1.75 V quando è da
considerare scarica.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.15
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Un secondo tipo di batteria è quello al nichel-cadmio, con celle da 1.2 V; gli elettrodi sono
in cadmio e ossidrossido di nichel (NiOOH), mentre l’elettrolito è una soluzione acquosa di
idrossido di potassio (KOH). La reazione risulta:
Cd + 2H2O + 2NiOOH 2Ni(OH)2 + Cd(OH)2.
All’elettrodo di cadmio gli atomi si dissolvono spontaneamente in ioni e vanno in soluzione combinandosi con gli ioni idrossido presenti:
Cd Cd++ + 2eCd++ + 2OH- Cd(OH)2
Infine, nell’altro elettrodo avviene la seguente reazione spontanea:
2NiOOH + 2e- + 2H2O 2Ni(OH)2 + 2OHQuesto tipo di batteria è più costosa e ha maggiore effetto memoria durante i cicli di carica
e scarica parziale; tuttavia è più comunemente installata sui velivoli perché presenta una serie
di vantaggi rispetto alla batteria al piombo:
minore manutenzione;
maggiore efficienza ad alte intensità di carica e scarica;
tensione erogata più costante nel tempo;
migliore mantenimento della carica durante lunghi periodi di non utilizzo;
maggiore resistenza ai cicli di carica/scarica (2000 contro i 500 della batteria al Pb);
maggiore densità di energia (60 Wh/kg contro i 30 della batteria al Pb).
Per l’alimentazione di sistemi di emergenza possono essere installate batterie all’argentozinco, molto costose, dotate di una scarsa resistenza ai cicli di carica/scarica (meno di 100),
ma capaci di immagazzinare fino a 200 Wh/kg.
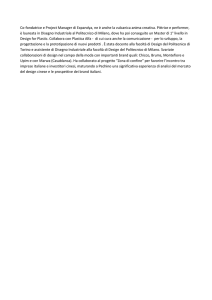
La
figura
5.13
mostra
l’andamento tipico della tensione
durante la scarica ad un determinato valore costante di corrente per
batterie al piombo e nichelcadmio. Si nota che le batterie al
nichel-cadmio mantengono una
tensione costante fino a quasi la
scarica dopo di che la tensione cala
bruscamente; nella batterie al
piombo si ha invece una diminuFig. 5.13 -Tensione durante il tempo di scarica
zione della tensione già dall’inizio
della scarica.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.16
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.13 Illuminazione
La potenza elettrica impiegata per l’illuminazione può essere una quota importante della
potenza installata.
Questa riguarda sia l’illuminazione interna (luci cabina pilotaggio e passeggeri, faretti dilettura, illuminazione comandi e strumentazione) sia l’illuminazione esterna.
L’illuminazione esterna comprende:
luci di via
luci anticollisione
fari di atterraggio
fari di taxing
fari di ispezione del bordo d’attacco dell’ala
luci di emergenza.
Fig. 5.14 – Luci esterne
Le luci di via utilizzano le stesse convenzioni usate in marina che consentono di capire la
direzione di moto del velivolo (rosso a sinistra, verde a destra e bianco in centro).
Le luci anticollisione, lampeggianti, aumentano la visibilità del velivolo rispetto alle luci
fisse.
I fari di atterraggio e di taxing consentono una illuminazione delle piste in fase di atterraggio e di taxing.
I fari di ispezione del bordo di attacco dell’ala ne consentono un controllo in caso di anomalia.
Le luci di emergenza intervengono in caso di incidente per illuminare le zone di uscita di
emergenza.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.17
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.14 Cariche elettrostatiche
Il velivolo accumula facilmente cariche elettrostatiche sulla sua superficie esterna. Per evitare problemi dovuti alla presenza di queste cariche sono necessarie diverse azioni:
evitare la possibilità di formazione di archi elettrici assicurando con opportuni collegamenti la continuità elettrica fra tutte le superfici esterne del velivolo, continuità che potrebbe
mancare per esempio fra ala e superfici mobili;
disporre dispersori che attraverso delle punte, dove quindi si ha una addensamento di carica
elettrostatica, creino delle scariche;
assicurare una volta atterrati l’equilibrio di potenziale fra il velivolo ed il terreno.
Fig. 5.15 – Collegamenti per ristabilire continuità elettrica
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.18
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.15 Esempi di impianti elettrici
5.15.1 Airbus A340
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.19
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.15.2 McDonald Douglas MD11
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.20
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.21
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.22
POLITECNICO DI MILANO - DIPARTIMENTO DI SCIENZE E TECNOLOGIE AEROSPAZIALI
IMPIANTI E SISTEMI AEROSPAZIALI – Dispense del corso, versione 2014
Capitolo 5 – Impianto elettrico
5.16 Bibliografia
EHJ Pallett; Aircraft Electrical Systems, Pitman,1976.
S.Chiesa, Impianti Di Bordo Per Aeromobili: Impianto Elettrico, CLUT, 1981.
G.G.Wakefield; Aircraft Electrical Engineering, Chapman & Hall, 1959.
R.H.Kaufmann, H.J.Finison; Dc Power Systems For Aircraft, Wiley, 1952.
J.L.McKinley, R.D.Bent; Electricity And Electronics For Aerospace Vehicles, McGrawHill, 1961.
Aircraft Electrical Power Systems, SAE,1981.
Queste dispense possono essere liberamente scaricate dal sito internet del Politecnico di Milano. La vendita è vietata.
5.23